ISS027-E-032065 (18 May 2011) --- This close-up view of the nose of space shuttle Endeavour was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.

iss053e234625 (11/21/2017) --- A view of OSIRIS-3U Satellite Deployer Number 8 after deployment from the NanoRacks CubeSat Deployer Number 13. OSIRIS-3U is an integrated CubeSat that conducts measurements of the Earth’s ionosphere, in coordination with a ground-based astronomy observatory.
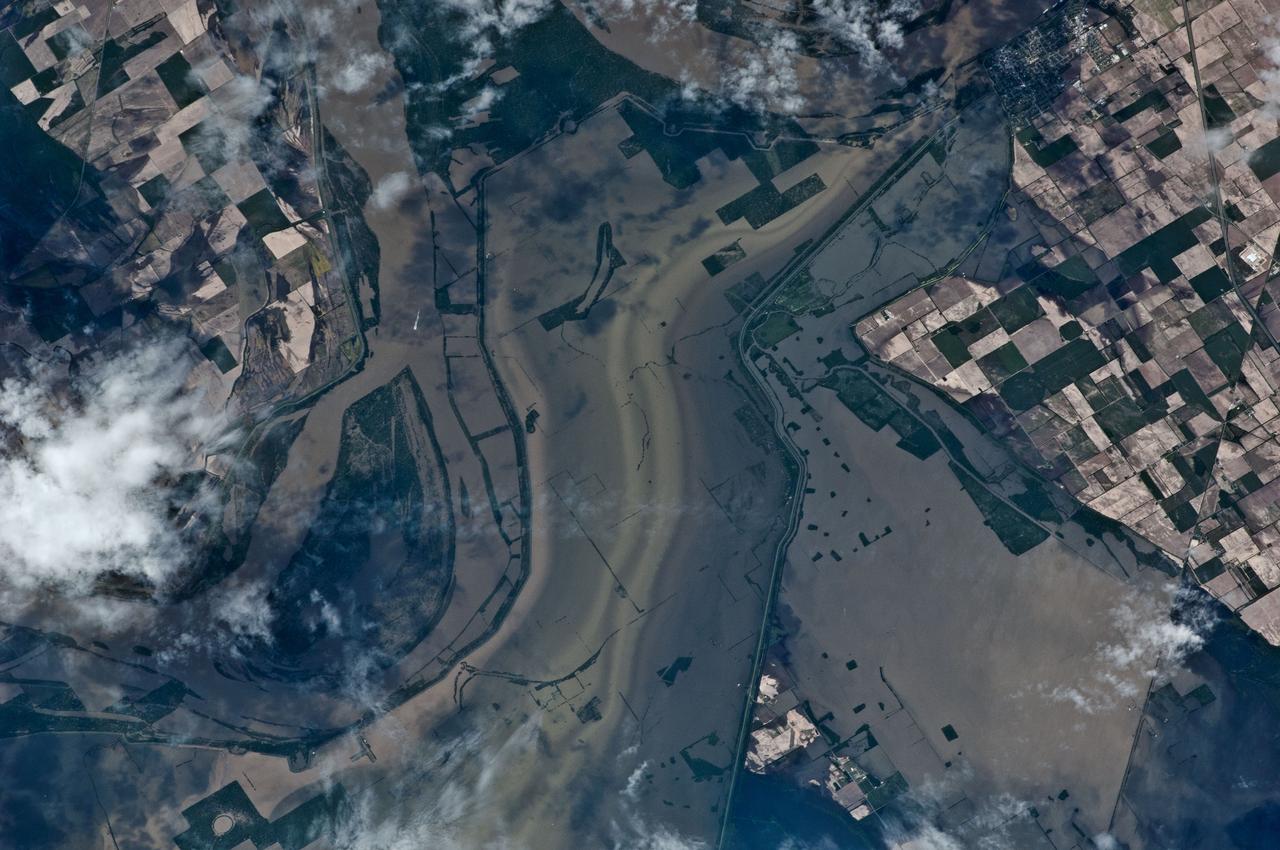
ISS027-E-027026 (12 May 2011) --- An Expedition 27 crew member recorded this image aboard the International Space Station as the orbital outpost was passing over the Mississippi River flood waters from 220 miles above. North is toward the bottom of the image, which was captured using a 400-mm lens. This highly impacted area, centered near 36.6 degrees north latitude and 89.5 degrees west longitude, is just east of New Madrid, Mo. (visible in upper right). Levees appear to be intact here, but there is extensive lowland crop flooding.

iss053e303473 (11/132017) --- Photo documentation of Augmented Reality Application for Maintenance, Inventory and Stowage (ARAMIS) Maintenance Session abord the International Space Station (ISS). The ARAMIS investigation demonstrates use of augmented reality technology to improve efficiency of operations aboard the space station.

ISS027-E-032126 (18 May 2011) --- This close-up view of the starboard side of space shuttle Endeavour’s crew cabin was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.

iss053e234621 (11/21/2017) --- A view of OSIRIS-3U Satellite Deployer Number 8 after deployment from the NanoRacks CubeSat Deployer Number 13. OSIRIS-3U is an integrated CubeSat that conducts measurements of the Earth’s ionosphere, in coordination with a ground-based astronomy observatory.
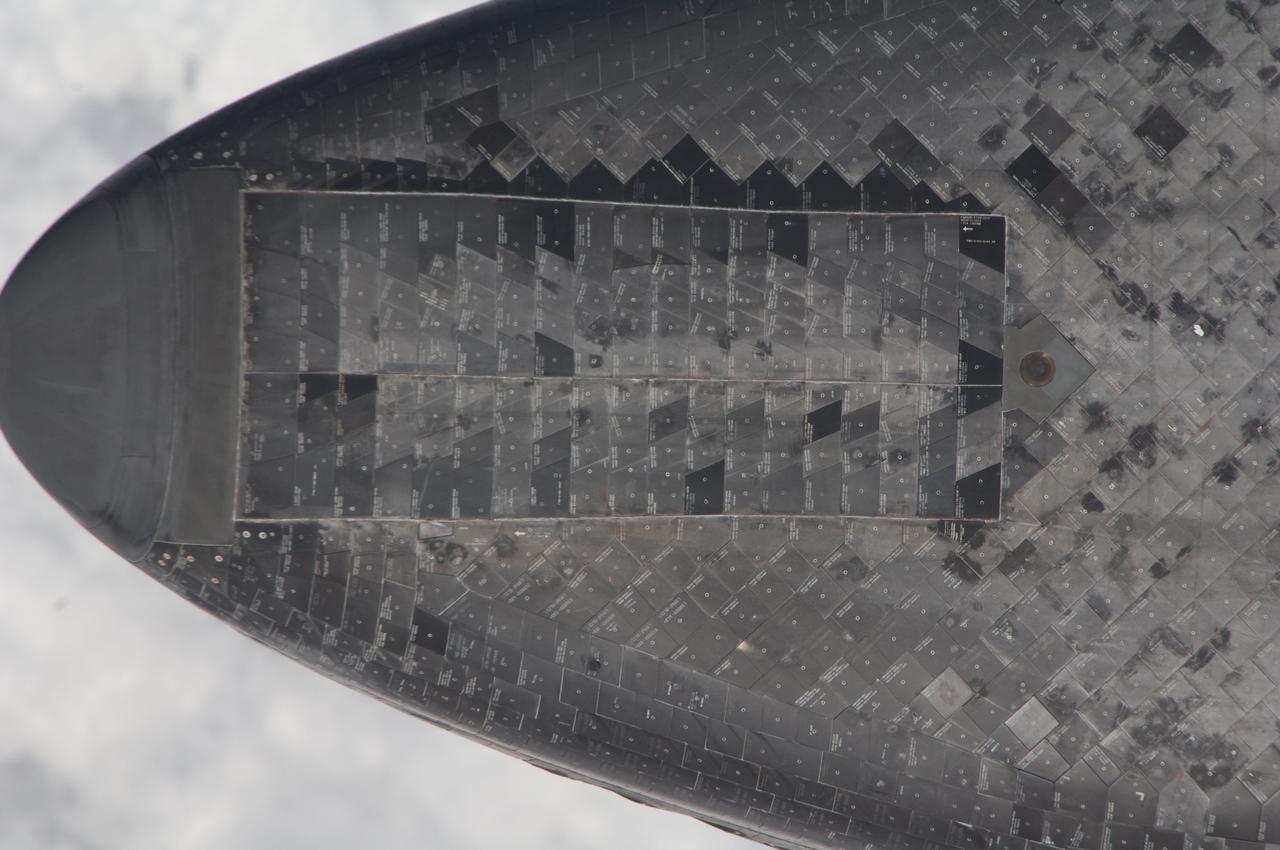
ISS027-E-032166 (18 May 2011) --- This underside view of the nose of space shuttle Endeavour was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.

ISS027-E-007901 (27 March 2011) --- In honor of those affected by the Tohoku-Kanto Earthquake in Japan, paper cranes (origami craft), placed in the Kounotori2 H-II Transfer Vehicle (HTV-2) are featured in this image photographed by an Expedition 27 crew member on the International Space Station. The HTV2 is scheduled to be released by the International Space Station?s robotic arm at 11:45 a.m. EDT on March 28, and re-enter Earth?s atmosphere on March 29, 2011.

iss053e234598 (11/21/2017) --- A view of OSIRIS-3U Satellite Deployer Number 8 after deployment from the NanoRacks CubeSat Deployer Number 13. OSIRIS-3U is an integrated CubeSat that conducts measurements of the Earth’s ionosphere, in coordination with a ground-based astronomy observatory.

ISS027-E-027019 (12 May 2011) --- Parts of two states highly impacted by recent flooding of the Mississippi River, are pictured in this International Space Station image featuring an area east of Blytheville, Ark., off the right side of the image. Center point coordinates are located at 35.8 degrees north latitude and 89.7 degrees west longitude The areas of Ruckers Place, Tenn. and Tomato, Ark. are surrounded by water, while Barfield, Ark. is still dry behind the levee on the right side of the image. North is toward the bottom of the photo.

ISS027-E-011058 (9 April 2011) --- The Parana River floodplain in northern Argentina is featured in this image photographed by an Expedition 27 crew member on the International Space Station. This image shows a 29-kilometer stretch of the Parana River, South America?s second largest river, downstream of the small city of Goya (barely distinguishable as grayer surfaces in the extreme top left corner of the image). The Parana River ranges up to three kilometers wide along the reach illustrated in the image. Its strong brown color indicates that it is carrying a heavy load of muddy sediment. Smaller active side channels also carry this muddy water. Numerous lakes are typical on active floodplains, and appear here as irregular bodies of water. Some appear brown, indicating that they have been refilled during recent higher flood levels of the active channels. The main channel Parana River (top) is deep enough to allow smaller ocean-going ships to pass north of the illustrated region to the capital city of Asuncion in landlocked Paraguay, fully 1,200 kilometers inland (well out of the image). The Parana River is thus an important transportation route for landlocked cities such as Asuncion and inland cities of eastern landlocked Bolivia and inland Brazil. The Parana floodplain occupies the entire image; it is so wide?18 kilometers?that its banks are not visible. Numerous curved, or meandering past channels are the most prominent characteristic of the floodplain. These indicate prior positions of rivers. As river beds move laterally by natural processes, they leave remnants of their channels, which appear as lakes, and finally fill with mud. This is an excellent image for illustrating these meander forms. From a geological standpoint it is interesting that almost all the past channels are similar in curvature to the smaller active side rivers; almost no forms show, in any obvious way, prior positions of the main, very wide Parana channel. The reverse might be expected since the main channel is so dominant in the modern landscape.
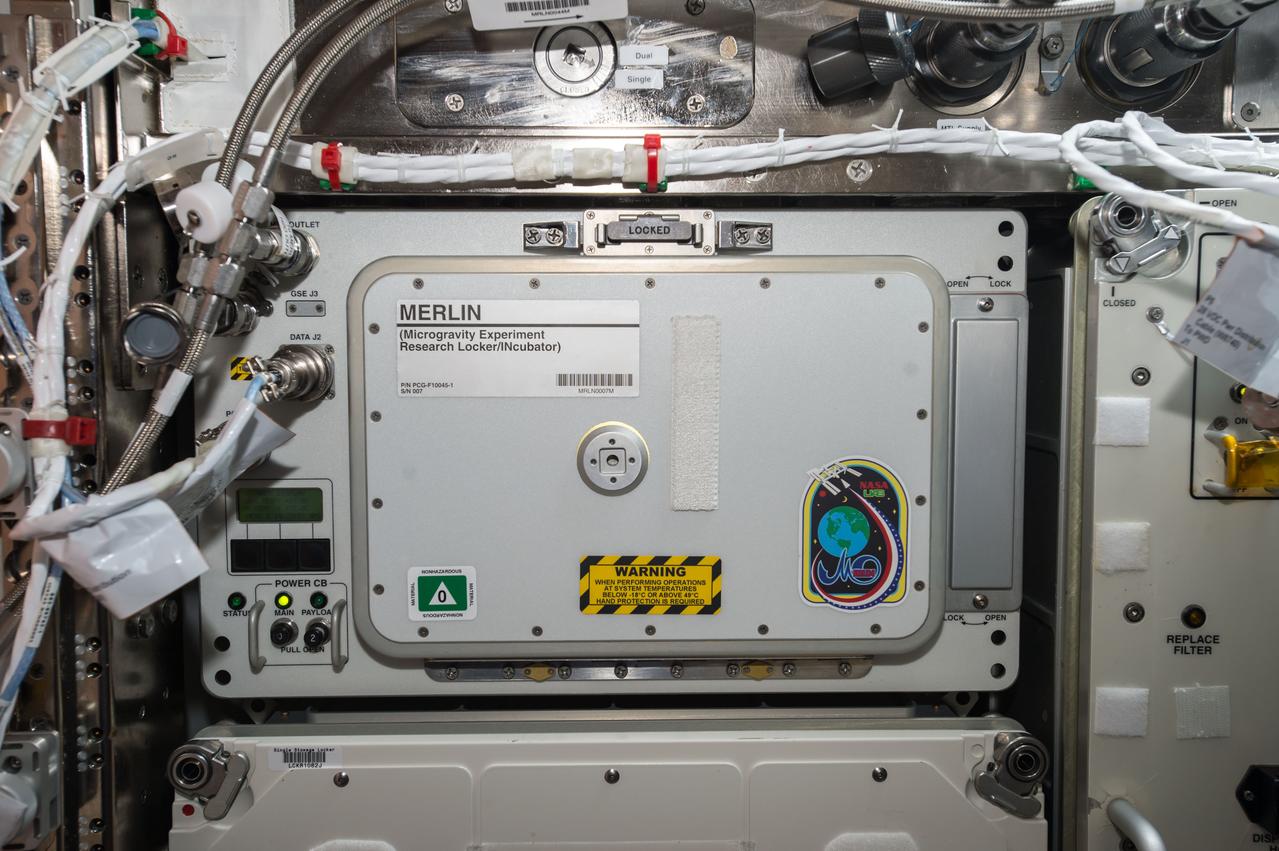
iss053e199088 (Nov. 15, 2017) --- Microgravity Experiment Research Locker/Incubator (MERLIN) provides a thermally controlled environment for scientific experiments. MERLIN is capable of providing temperatures between -20oC (-4oF) and +48.5oC (+119oF)

iss053e234714 (Nov. 21, 2017) --- Advanced Plant Habitat (APH) Facility in the Japanese Experiment Module (JEM) Pressurized Module (JPM). The Plant Habitat is a fully automated facility that provides a large, enclosed, environmentally-controlled chamber for plant bioscience research.

ISS027-E-015441 (22 April 2011) --- Russian cosmonaut Dmitry Kondratyev (left), Expedition 27 commander; along with NASA astronaut Ron Garan (center) and Russian cosmonaut Andrey Borisenko, both flight engineers, watch the departure of the unpiloted ISS Progress 41 supply vehicle through windows in the Zvezda Service Module of the International Space Station.

ISS027-E-032063 (18 May 2011) --- This close-up view of the crew cabin of space shuttle Endeavour was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.

ISS027-E-009564 (31 March 2011) --- Agricultural fields along the Shebelle River in Ethiopia are featured in this image photographed by an Expedition 27 crew member on the International Space Station. The Shebelle River supports limited agricultural development within the arid to semi-arid Ogaden Plateau region of southeastern Ethiopia. This detailed photograph illustrates a network of irrigation canals and fields located approximately 42 kilometers to the west-northwest of the city of Gode, Ethiopia. Floodplain sediments and soils are dark brown to gray (center), and contrast with reddish rocks and soils of the adjacent plateau. Water in the Shebelle River, and the irrigation canals, has a bright, mirror-like appearance due to sunglint, or light reflecting off the water surface back towards the observer on the space station. Vegetation in the floodplain (bottom center) and agricultural fields is dark green. The river water supports a variety of crops?the most common being sorghum and maize?as well as grazing for livestock (cattle, sheep, goats, and camels). The Shebelle River has its headwaters in the Ethiopian Highlands, and transports water and sediment 1,000 kilometers to the southeast across Ethiopia, continuing an additional 130 kilometers into neighboring Somalia. The Shebelle River does not reach the Indian Ocean during most years, but disappears into the sands near the coast in Somalia. During periods of heavy rainfall and flooding however, the Shebelle can reach the Indian Ocean.
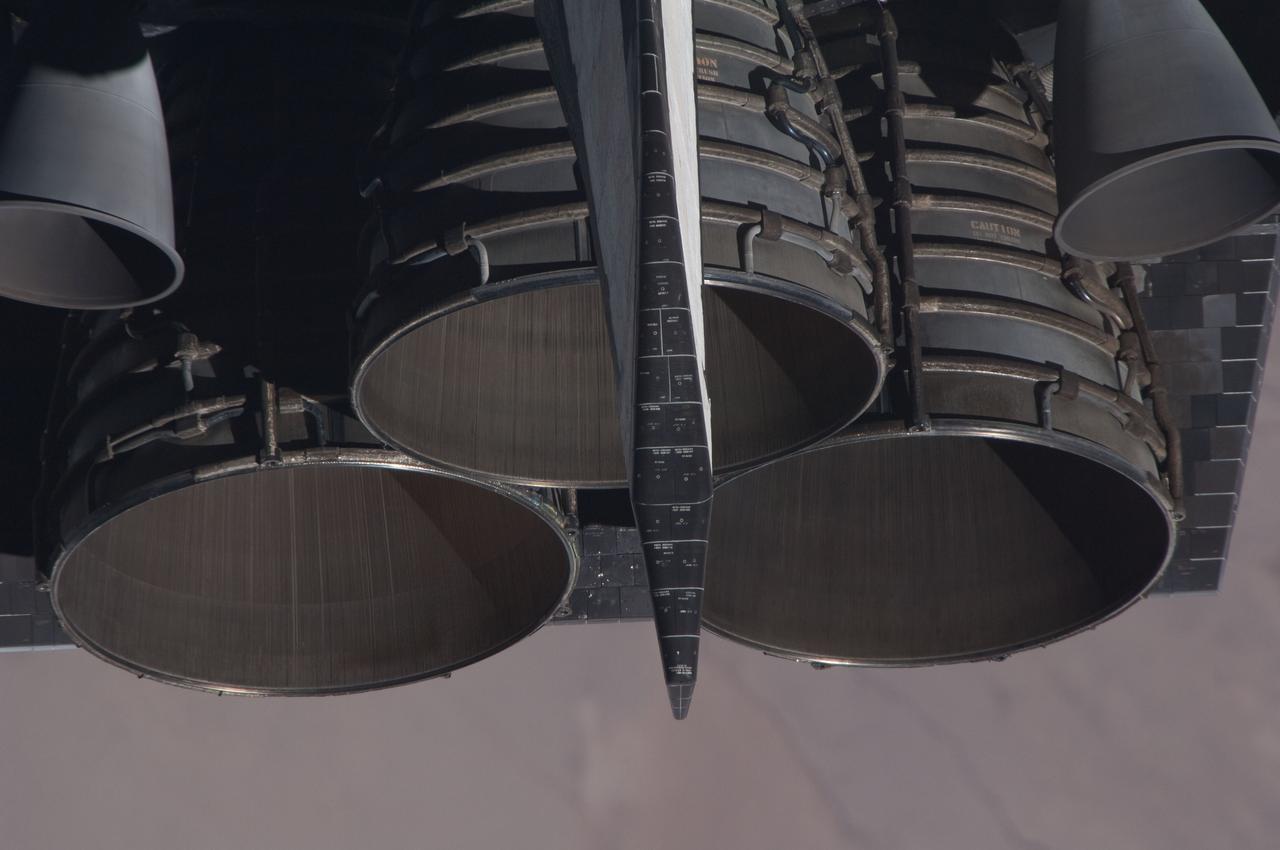
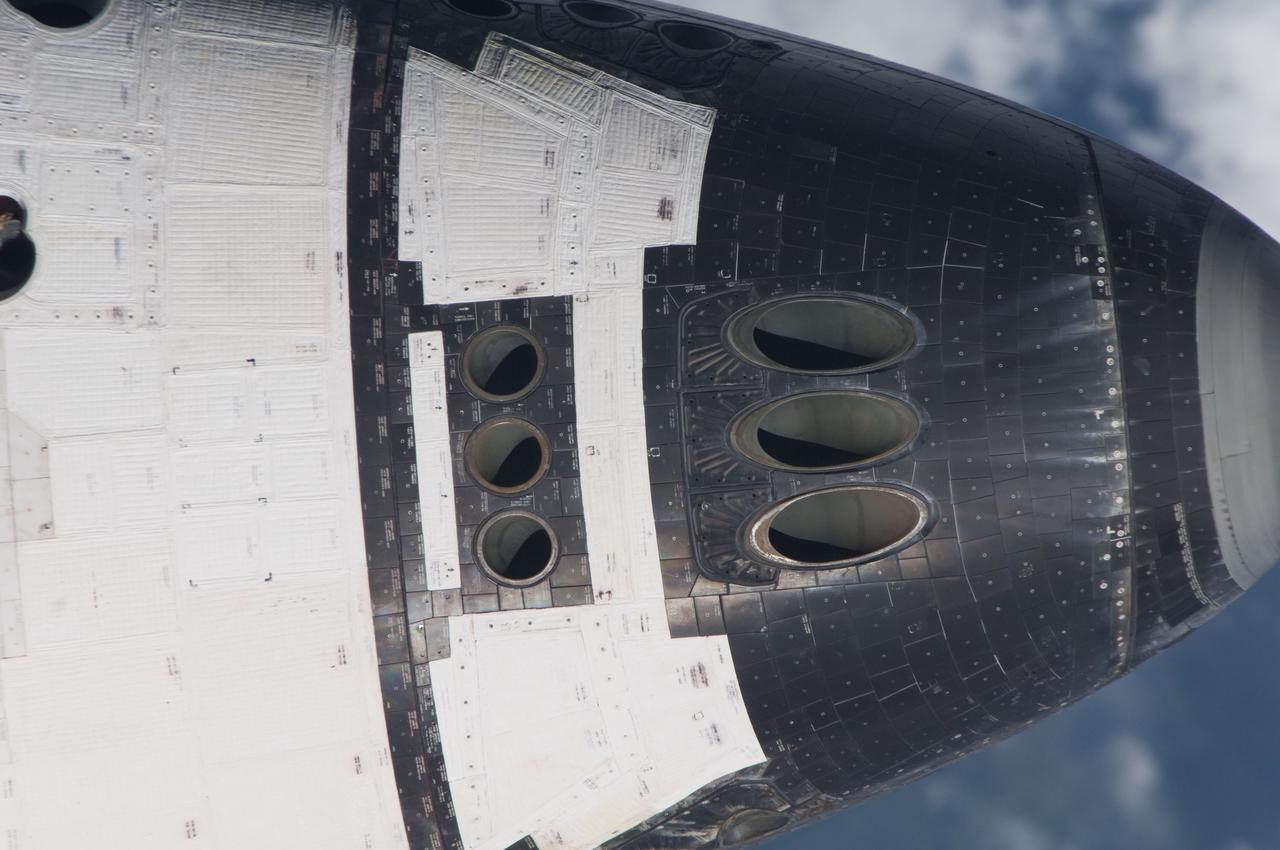
ISS027-E-032089 (18 May 2011) --- This close-up view of the space shuttle Endeavour’s three main engines was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.

iss053e020149 (Sept. 14, 2017) --- Flight Engineer Paolo Nespoli sets up thermal exchange hardware inside the Microgravity Science Glovebox located in the U.S. Destiny laboratory module.

iss052e075348 (8/25/2017) --- Astronaut Jack Fischer is photographed performing protocol operation for ESA’s SUPVIS-Justin investigation. SUPVIS-Justin, part of the Meteron program, aims to demonstrate that an astronaut on an orbiting space station can command a robot via a tablet PC to perform complex tasks on a planetary surface. The SUPVIS Justin experiment includes an extended supervised autonomy concept: the crew gives high level commands to the robot, which then uses its local intelligence and decision-making capability to execute a task independently, according to pre-programmed algorithms. In this sense, the responsibility of decision-making is shared between the crew and the robot.
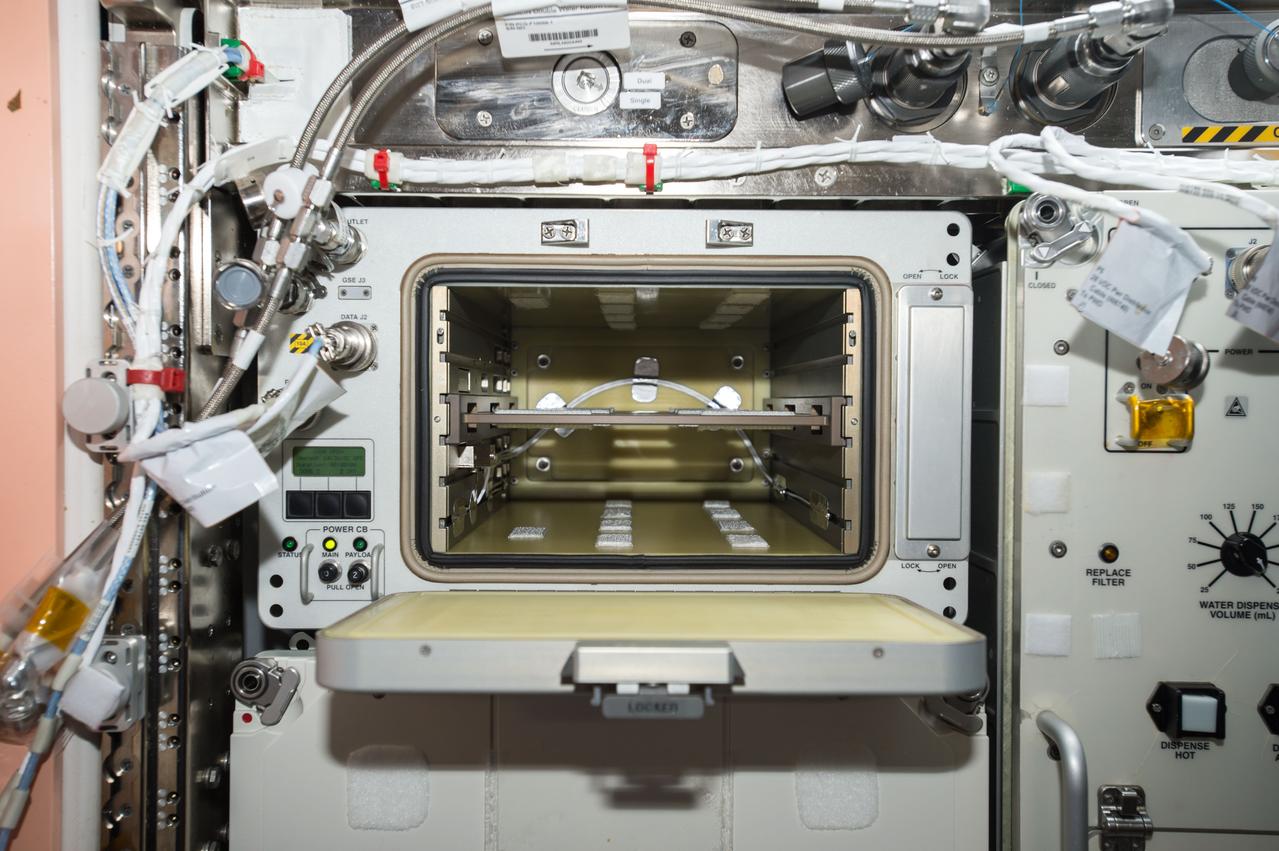
iss053e199089 (Nov. 15, 2017) --- Microgravity Experiment Research Locker/Incubator (MERLIN) in its open position. MERLIN provides a thermally controlled environment for scientific experiments and is capable of providing temperatures between -20oC (-4oF) and +48.5oC (+119oF)

ISS027-E-015444 (22 April 2011) --- The unpiloted ISS Progress 41 supply vehicle departs from the International Space Station at 7:41 a.m. (EDT) on April 22, 2011. Filled with trash and discarded items, Progress 41 will remain in orbit a safe distance from the station for engineering tests before being commanded by flight controllers to descend to a destructive re-entry into Earth’s atmosphere over the Pacific Ocean. The departure of Progress 41 clears the way for the next unpiloted supply ship, ISS Progress 42, which is set to launch April 27 from the Baikonur Cosmodrome in Kazakhstan, delivering three tons of food, fuel and supplies for the Expedition 27 crew.

iss053e323106 (12/10/2017) --- European Space Agency (ESA) astronaut Paolo Nespoli in the Columbus module with AstroPi hardware. AstroPi uses two augmented Raspberry Pi computers equipped with the mighty Sense HAT (Hardware Attached on Top) that measures the environment inside the space station, detect how the station moves through space, and pick up the Earth’s magnetic field. Each AstroPi is also equipped with different kinds of cameras: one has an infrared camera, and the other has a standard visible spectrum camera. The activities related to this project are intended to encourage and strengthen the teaching of computing and coding curriculums, and through this stimulate the curiosity of students and motivate them towards further study of STEM (Science, Technology, Engineering and Mathematics) subjects.

ISS027-E-013096 (15 April 2011) --- NASA astronauts Ron Garan and Cady Coleman, both Expedition 27 flight engineers, work with extravehicular activity (EVA) grease guns in the Unity node of the International Space Station.

ISS027-E-016922 (25 April 2011) --- River deltas and Lake Ayakum in China (Tibet) are featured in this image photographed by an Expedition 27 crew member on the International Space Station. The Tibetan Plateau contains numerous lakes that dot an otherwise arid landscape. Lake Ayakum is located near the northern boundary of the Plateau to the southeast of the Kunlun Mountains. While many of the small glacier- and snowmelt-fed streams that cross the Tibetan Plateau eventually give rise to major Southeast Asian rivers including the Mekong and Yangtze, some empty into saline lakes such as Lake Ayakum. This detailed photograph highlights two river deltas (upper left and lower right) formed along the southwestern shoreline of the lake. When sediments build up to the point that a river can no longer flow over them, it will jump to a new channel position and begin the process anew. Scientists have noted that, over geologic time, the channels tend to sweep back and forth ? similar to the motion of an automobile windshield wiper ? to form the typical semi-circular or fan shape of the delta. Gray to tan surfaces of both deltas indicate prior positions of their respective river channels; the uniform coloration and smooth texture suggest that they are relatively old and are now inactive. In contrast, the younger and currently active delta surfaces can be recognized by reddish-brown sediment and clearly visible river channels. Lateral channel migration is particularly evident in the approximately eight-kilometer-wide active delta area at upper left. The reddish coloration of the actively depositing sediment may indicate a change from the sources that formed the older parts of the deltas (or indicate weathering and soil formation on the older deposits), or an episodic input of dust or other material to the river catchments.

iss053e002408 (Sept, 5, 2017) --- The eye of Hurricane Irma is clearly visible from the International Space Station as it orbited over the Category 5 storm on Sept. 5, 2017.
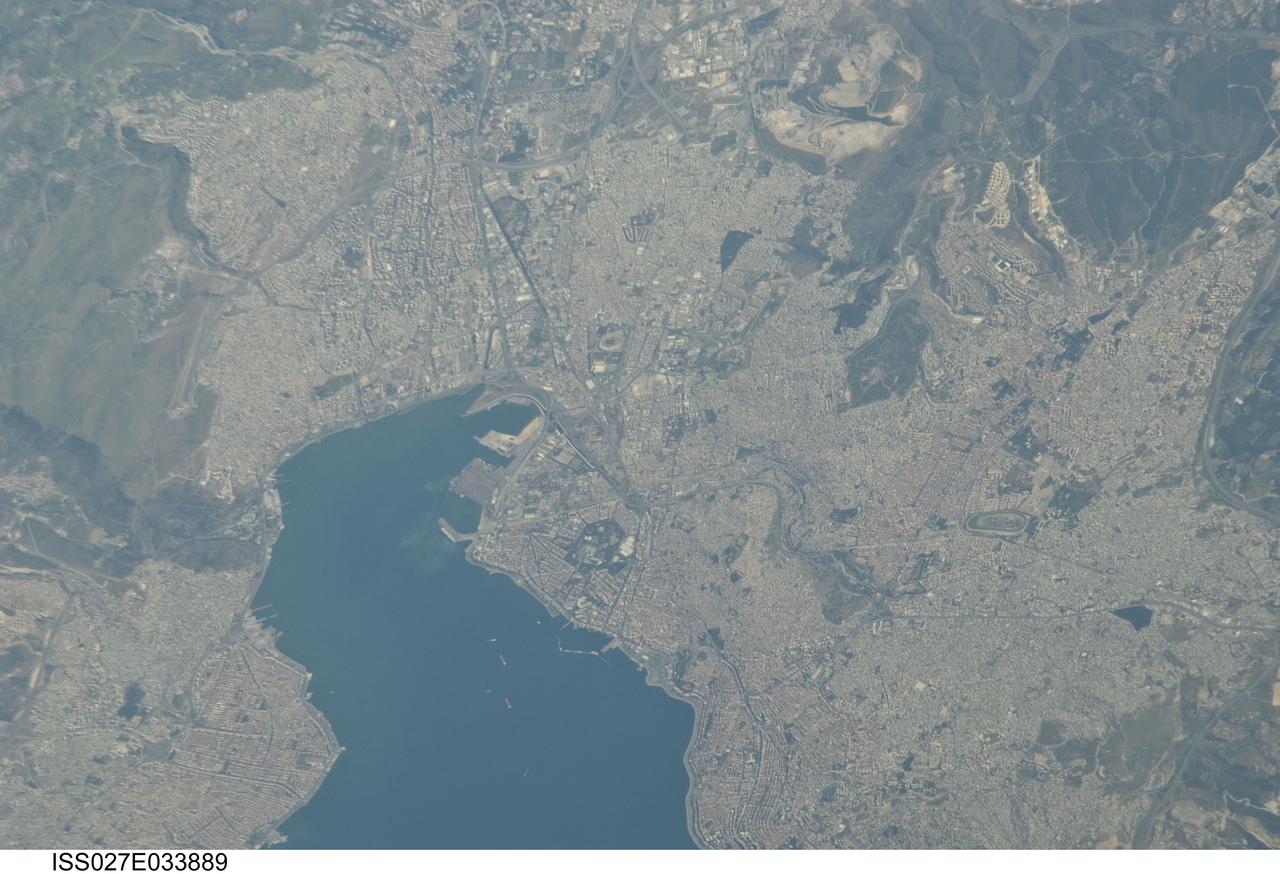
ISS027-E-033889 (16 May 2011) --- Izmir Metropolitan Area, Izmir Province in Turkey is featured in this image photographed by an Expedition 27 crew member on the International Space Station. The metropolis of Izmir is located in the western Anatolia region of Turkey. It is the country’s third largest city in terms of population and the second largest port city (after Istanbul). The Izmir region has included urban areas for almost 3,500 years, and the ancient core of the metropolitan area was originally known as Smyrna. Due to its location on the Gulf of Izmir (lower left) with access to the Aegean Sea, Izmir (or Smyrna) has been an important Mediterranean Sea port for most of its history. This detailed photograph highlights the modern urban landscape of the Izmir metropolitan area. Today, the metropolitan area includes eleven districts, many of which were independent neighborhoods prior to agglomeration into “greater Izmir”. Densely built-up residential and commercial districts, characterized by gray to reddish gray rooftops occupy much of the central part of the image. Larger structures with bright white rooftops are indicative of commercial/industrial areas near the Izmir Port at left. Two large sport complexes, the Ataturk Stadium and Sirinyer Hippodrome (horse racing track) are clearly visible at upper left and right respectively. Numerous vegetated parks (green) are located throughout the area. In addition to being a major trade center, greater Izmir is a hub for regional tourism.

iss052e075356 (8/25/2017) --- European Space Agency (ESA) astronaut Paolo Nespoli is photographed performing protocol operation for ESA’s SUPVIS-Justin investigation. SUPVIS-Justin, part of the Meteron program, aims to demonstrate that an astronaut on an orbiting space station can command a robot via a tablet PC to perform complex tasks on a planetary surface. The SUPVIS Justin experiment includes an extended supervised autonomy concept: the crew gives high level commands to the robot, which then uses its local intelligence and decision-making capability to execute a task independently, according to pre-programmed algorithms. In this sense, the responsibility of decision-making is shared between the crew and the robot. External Caption

ISS027-E-032085 (18 May 2011) --- This close-up view of the Alpha Magnetic Spectrometer-2 (AMS) in space shuttle Endeavour’s payload bay was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The station crew member used a digital still camera with an 800mm focal length, as the two spacecraft were approximately 600 feet (180 meters) apart.
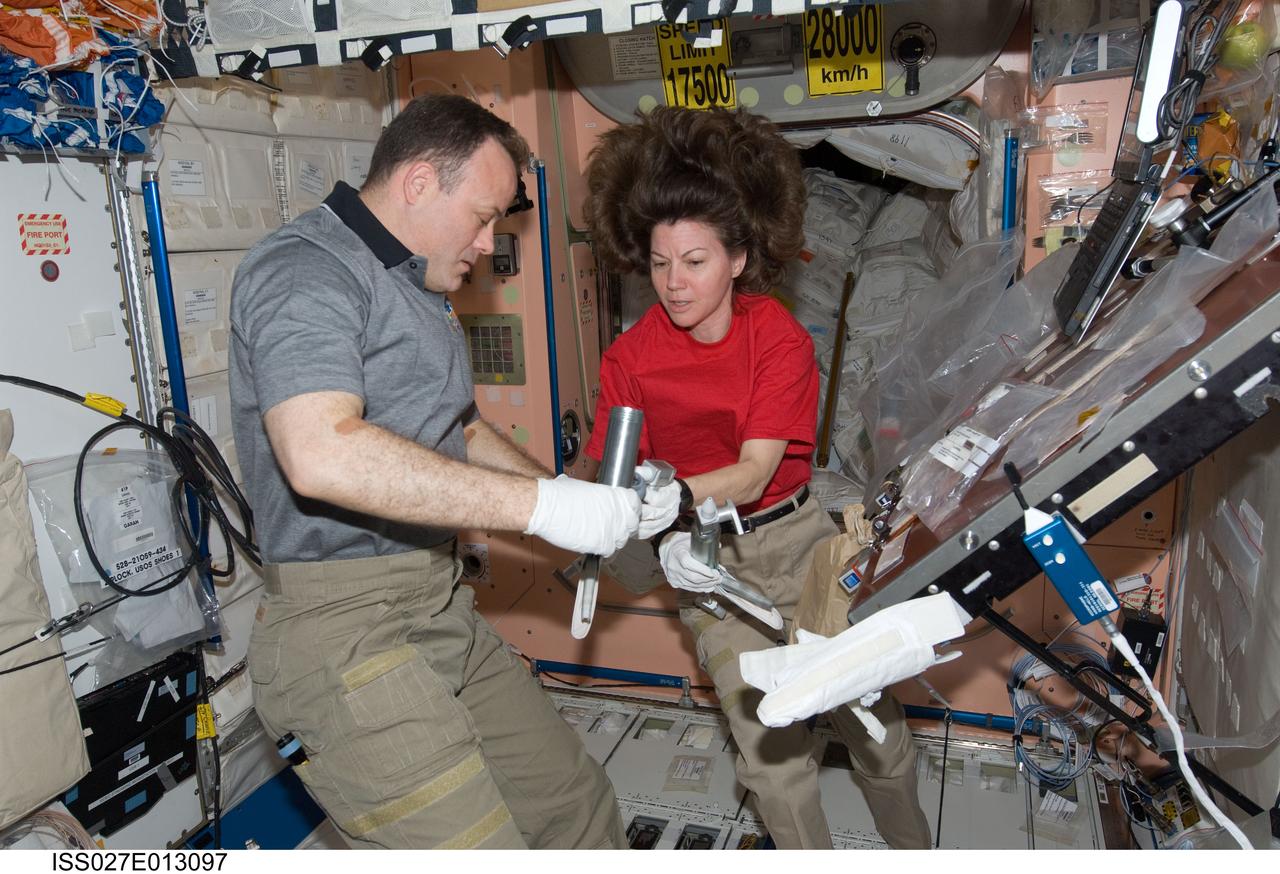
ISS027-E-013097 (15 April 2011) --- NASA astronauts Ron Garan and Cady Coleman, both Expedition 27 flight engineers, work with extravehicular activity (EVA) grease guns in the Unity node of the International Space Station.

iss052e024957 (Aug. 1, 2017) --- Astronaut Paolo Nespoli ingressed the Muscle Atrophy Research & Exercise System (MARES) chair in the Columbus module and adjusted pads and constraints for the Sarcolab-3 ankle protocol. The data collected for Sarcolab-3 will be compared to pre and postflight measurements to assess the impact of hypothesized microgravity induced muscle loss.

ISS027-E-017387 (6 April 2011) --- NASA astronaut Cady Coleman, Expedition 27 flight engineer, uses a computer in the Destiny laboratory of the International Space Station.

ISS027-E-031406 (16 May 2011) --- NASA astronaut Ron Garan, Expedition 27 flight engineer, installs a helium valve unit at the Common Gas Supply Equipment (CGSE) rack in the Kibo laboratory of the International Space Station.

ISS027-E-017386 (6 April 2011) --- NASA astronaut Cady Coleman, Expedition 27 flight engineer, uses a computer in the Destiny laboratory of the International Space Station.

ISS027-E-008748 (28 March 2011) --- Backdropped by Earth?s horizon and the blackness of space, the International Space Station's Canadarm2 unberths the unpiloted Japan Aerospace Exploration Agency?s Kounotori2 H-II Transfer Vehicle (HTV2), filled with trash and unneeded items, in preparation for its release from the station. NASA astronaut Cady Coleman and European Space Agency astronaut Paolo Nespoli, both Expedition 27 flight engineers, used the station?s robot arm to grapple the HTV2 and unberth it from the Earth-facing port of the Harmony node. The cargo craft was released at 11:46 a.m. (EDT) on March 28, 2011.

ISS027-E-027023 (12 May 2011) --- An Expediton 27 crew member aboard the International Space Station, 220 miles above Earth and the Mississippi River, captured this May 12 still photo, clearly showing the outlines of some heavily flooded agricultural fields on the Missouri side of the river. The center point for this 400-mm frame is 36.27 degrees north latitude and 89.57 degrees west longitude (north of Caruthersville, Mo. and west of Ridgely, Tenn.). North is towards the lower right corner of the image.

iss053e234606 (11/21/2017) --- A view of OSIRIS-3U Satellite Deployer Number 8 after deployment from the NanoRacks CubeSat Deployer Number 13. OSIRIS-3U is an integrated CubeSat that conducts measurements of the Earth’s ionosphere, in coordination with a ground-based astronomy observatory.