International Space Station (ISS) Remote Power Control Module (RPCM) Hot-mate/De-mate Assessment Dr. Erin Hayward , Mr. Todd Schneider, Mr. Jason Vaughn
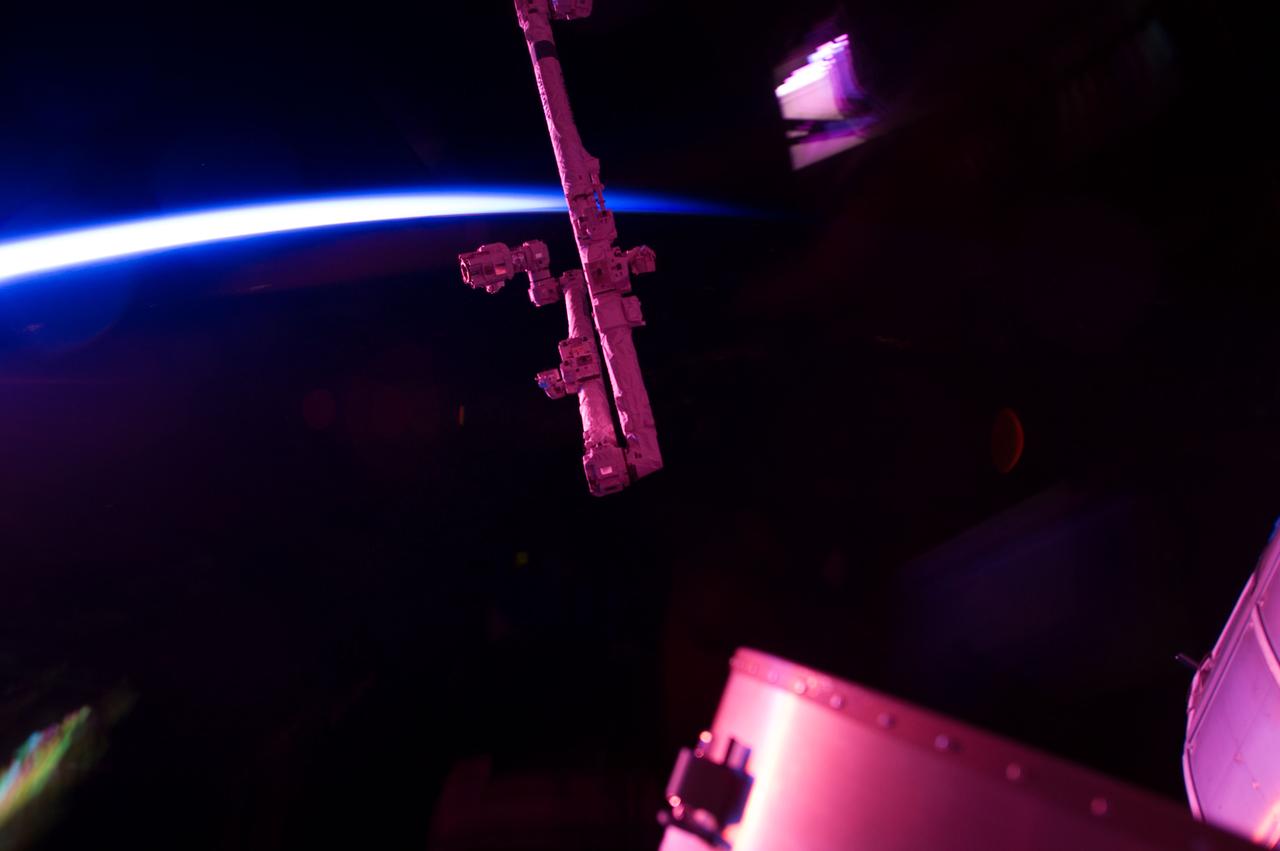
Earth airglow observation taken by the Expedition 35 crew aboard the ISS. The Canadarm2 Space Station Remote Manipulator System (SSRMS) and other portions of the ISS are in view.

Earth observation taken by the Expedition 35 crew aboard the ISS. The Canadarm2 Space Station Remote Manipulator System (SSRMS) is in view.

Earth observation taken by the Expedition 35 crew aboard the ISS. The Canadarm2 Space Station Remote Manipulator System (SSRMS) is in view.

Earth observation taken by the Expedition 35 crew aboard the ISS. A portion of the Canadarm2 Space Station Remote Manipulator System (SSRMS) is in view.

Earth observation taken by the Expedition 35 crew aboard the ISS. The Moon and Canadarm2 Space Station Remote Manipulator System (SSRMS) are in view.

ISS010-E-12589 (6 January 2005) --- Astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, participates in a training session with the Mobile Service System (MSS) Rack and Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).
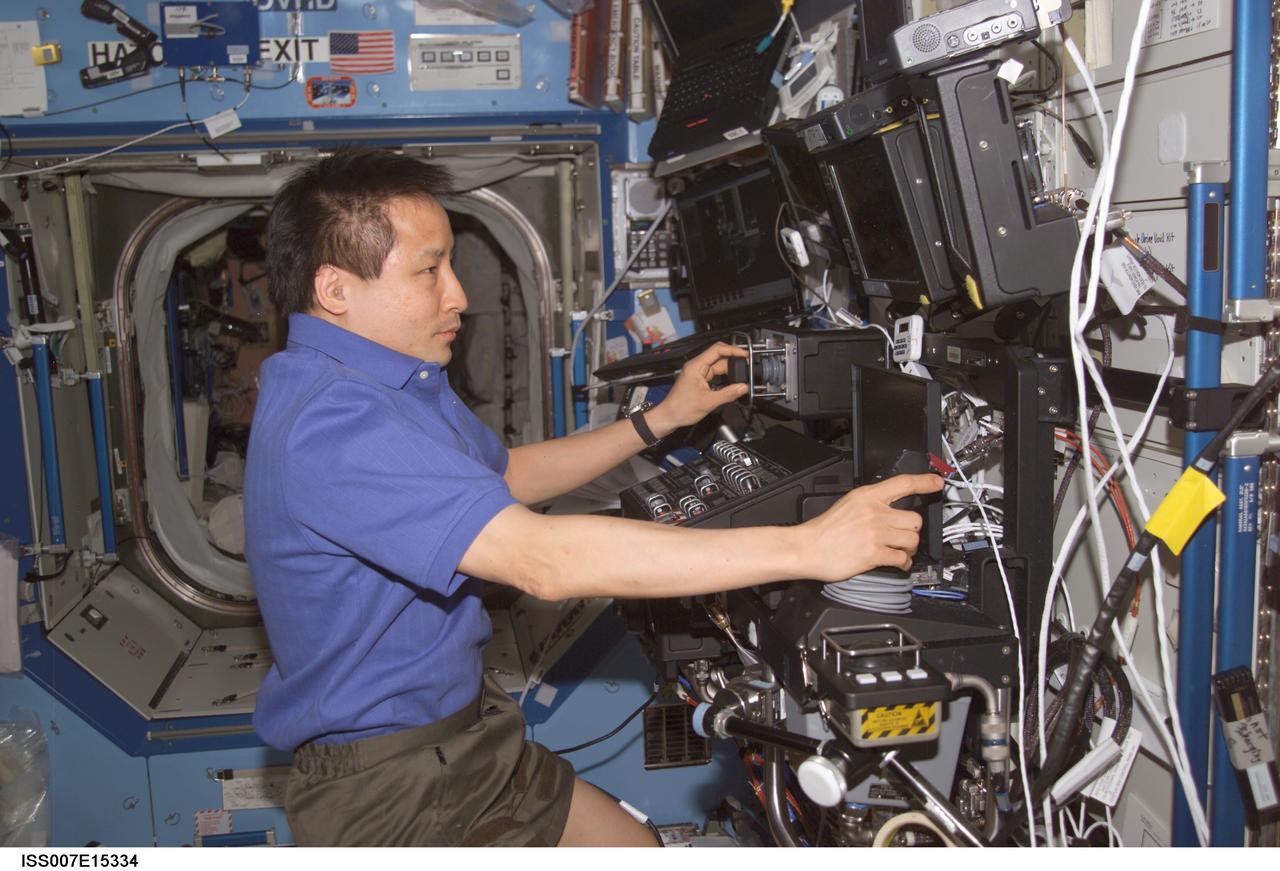
ISS007-E-15334 (23 September 2003) --- Astronaut Edward T. Lu, Expedition 7 NASA ISS science officer and flight engineer, works at the Space Station Remote Manipulator System (SSRMS) or Canadarm2 workstation in the Destiny laboratory on the International Space Station (ISS).

ISS009-E-29106 (18 October 2004) --- Astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, works with the controls of the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).
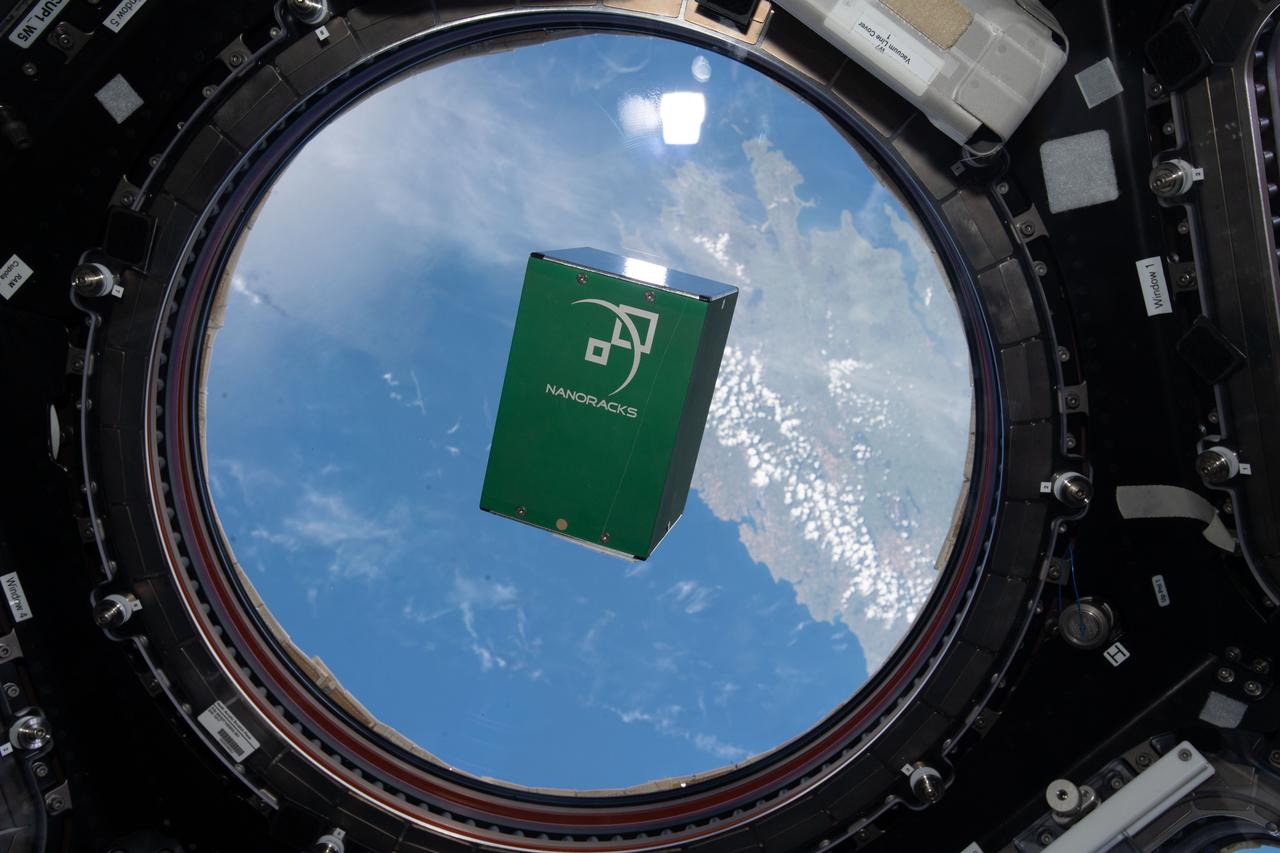
iss067e245388 (8/8/2022) --- A view of the NanoRacks-CUBERIDER-2 investigation shown in the cupola module aboard the International Space Station (ISS). NanoRacks-CUBERIDER-2 (NanoRacks-CR-2) is a small device flown aboard the International Space Station (ISS) that allows students in grades 6 to 11 to remotely operate space sensors.

ISS010-E-24985 (19 April 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer and flight engineer, participates in a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).
iss067e245386 (8/8/2022) --- A view of the NanoRacks-CUBERIDER-2 investigation shown in the cupola module aboard the International Space Station (ISS). NanoRacks-CUBERIDER-2 (NanoRacks-CR-2) is a small device flown aboard the International Space Station (ISS) that allows students in grades 6 to 11 to remotely operate space sensors.

ISS010-E-12590 (6 January 2005) --- Astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, participates in a training session with the Mobile Service System (MSS) Rack and Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).
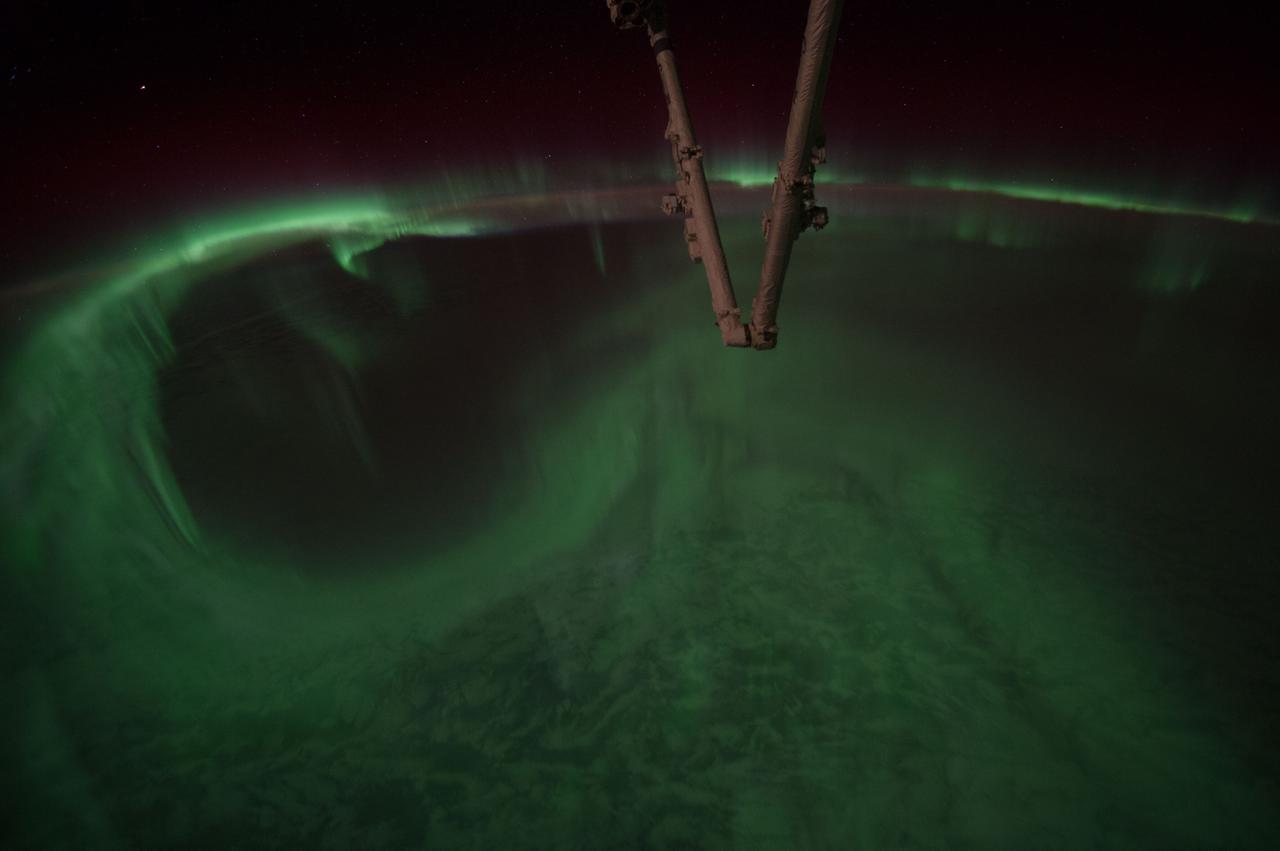
Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: Aurora. Part of Space Station Remote Manipulator System (SSRMS) arm is visible.

STS100-388-010 (19 April-1 May 2001) --- In the grasp of the shuttle's remote manipulator system (RMS) robot arm, the Spacelab pallet is installed on the Lab Cradle Assembly (LCA) on the International Space Station (ISS).

Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: Phenomenal Aurora. Part of the Space Station Remote Manipulator System (SSRMS) arm is also visible.

Earth Observation taken during a day pass by the Expedition 40 crew aboard the International Space Station (ISS). Part of Space Station Remote Manipulator System (SSRMS) is visible. Folder lists this as: the Middle East, Israel.
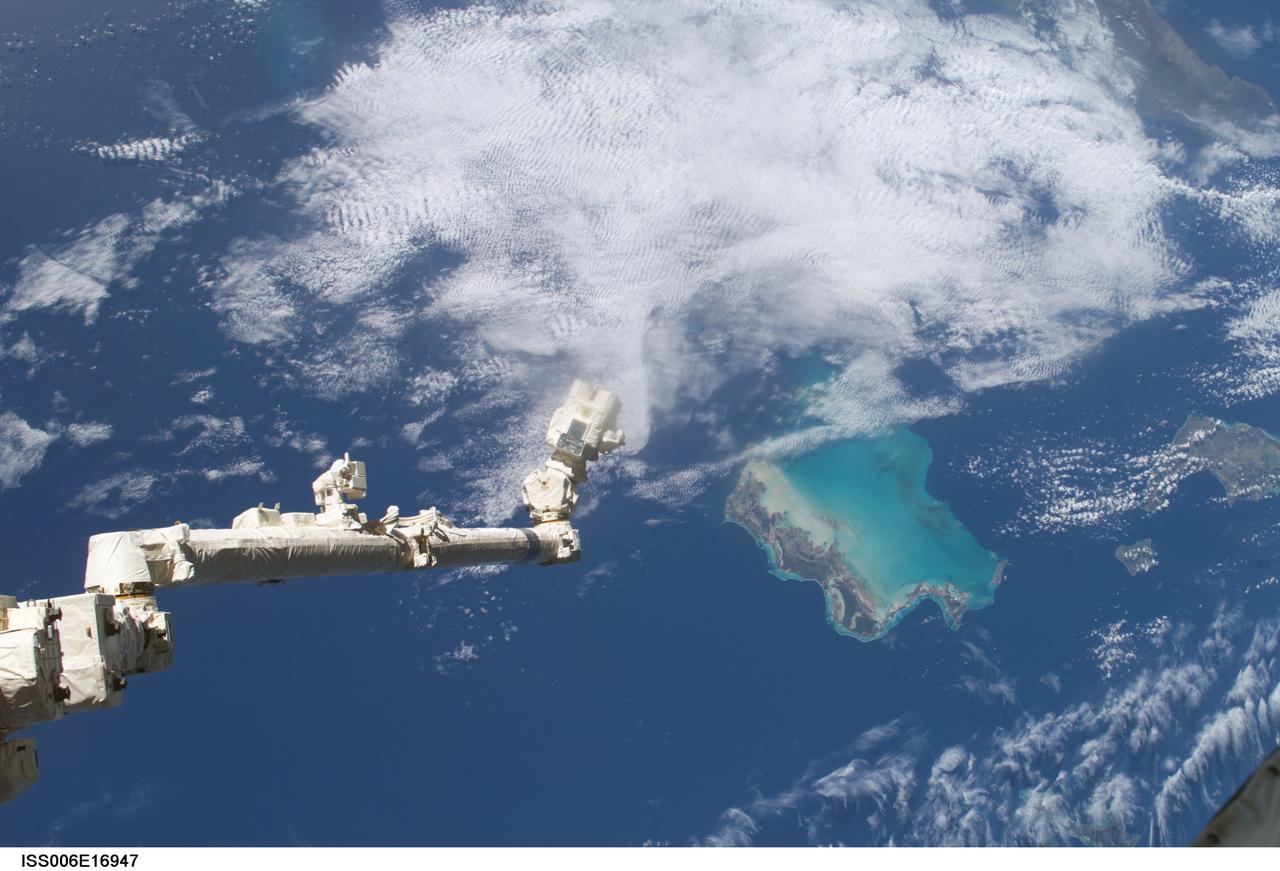
ISS006-E-16947 (9 January 2003) --- The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is pictured over the Bahama Islands in this digital still camera's view taken from the International Space Station (ISS).

Earth observation taken during a day pass by the Expedition 40 crew aboard the International Space Station (ISS). Part of Space Station Remote Manipulator System (SSRMS) arm is visible.
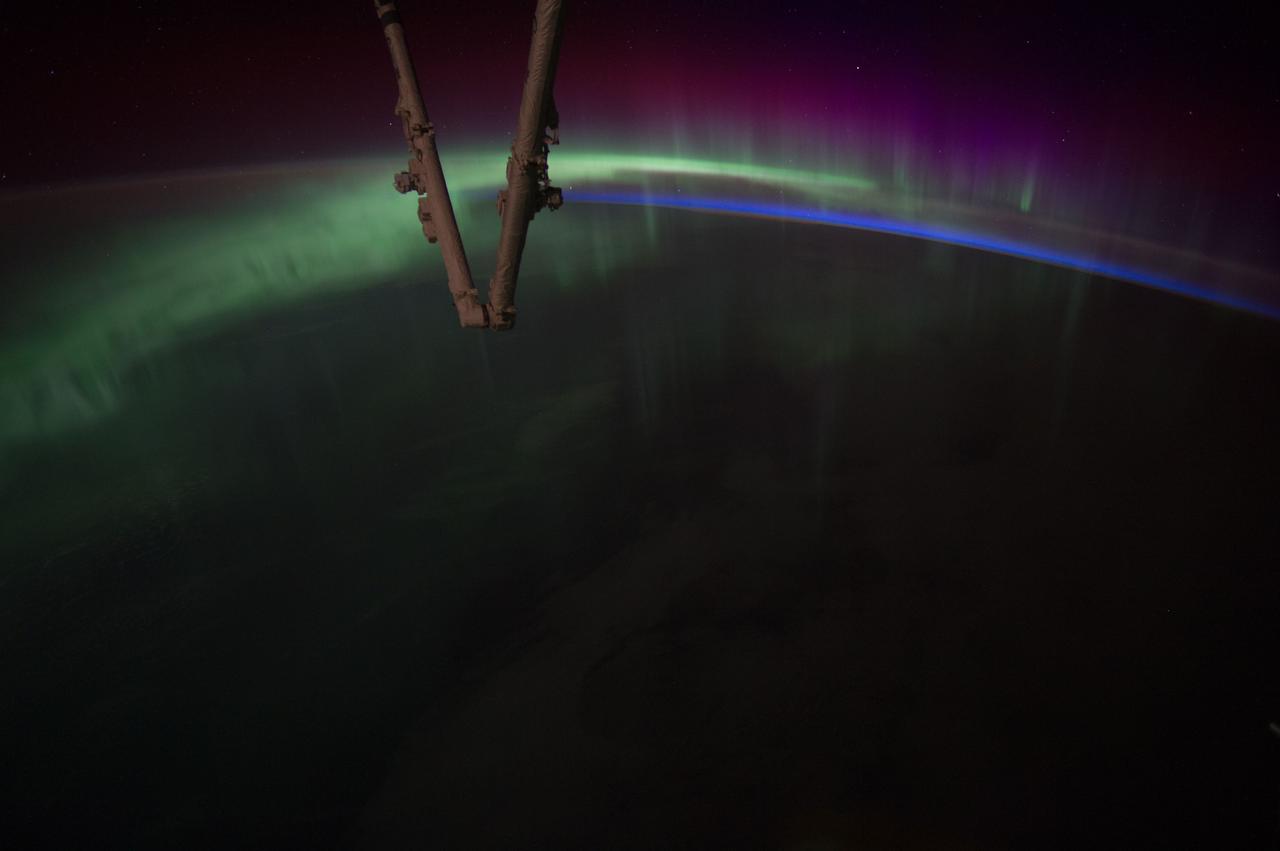
Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: Phenomenal Aurora. Part of the Space Station Remote Manipulator System (SSRMS) arm is also visible.

Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: Middle East. The Space Station Remote Manipulator System (SSRMS) arm is also visible.
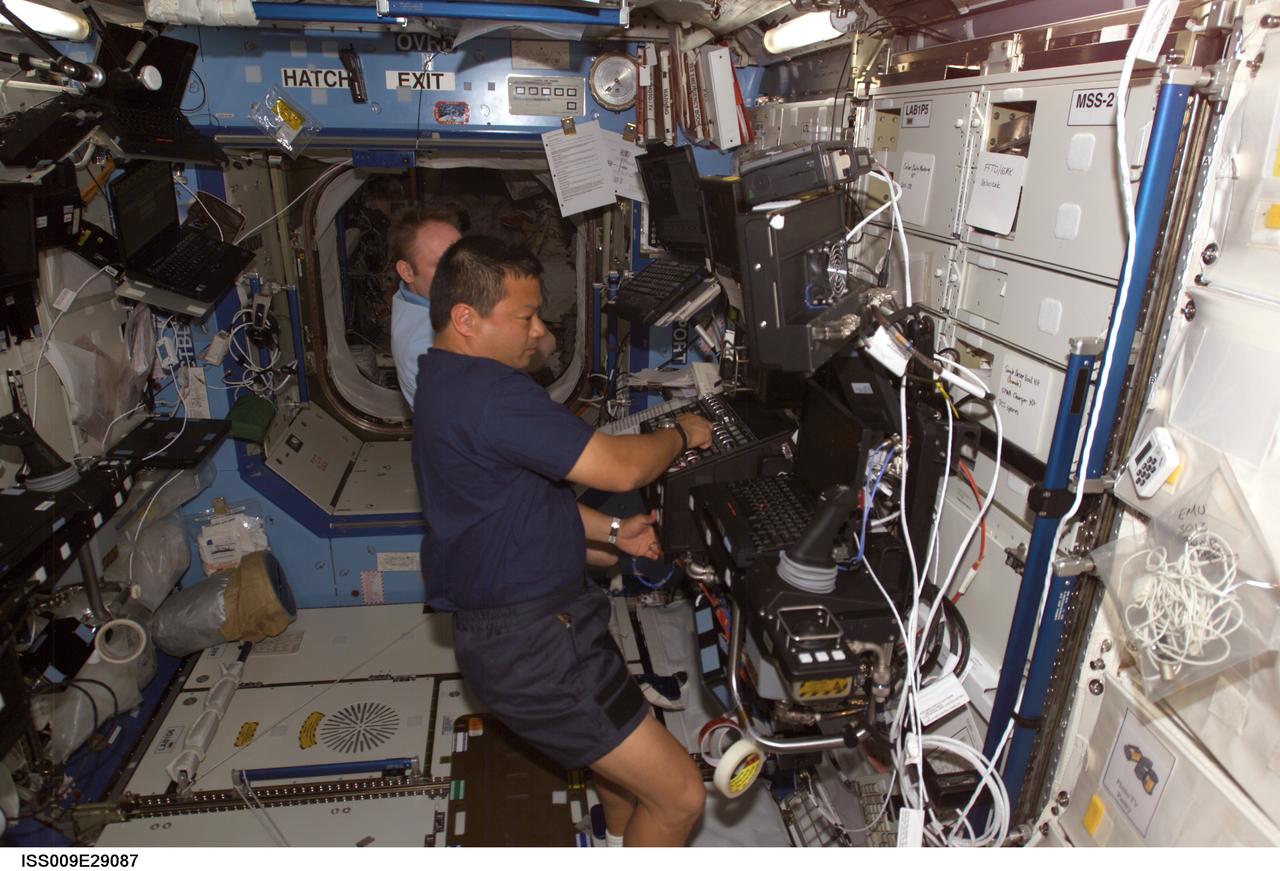
ISS009-E-29087 (18 October 2004) --- Astronaut Edward M. (Mike) Fincke (partially obscured), Expedition 9 NASA ISS science officer and flight engineer, takes astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, through a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS009-E-29084 (18 October 2004) --- Astronaut Edward M. (Mike) Fincke (partially obscured), Expedition 9 NASA ISS science officer and flight engineer, takes astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, through a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

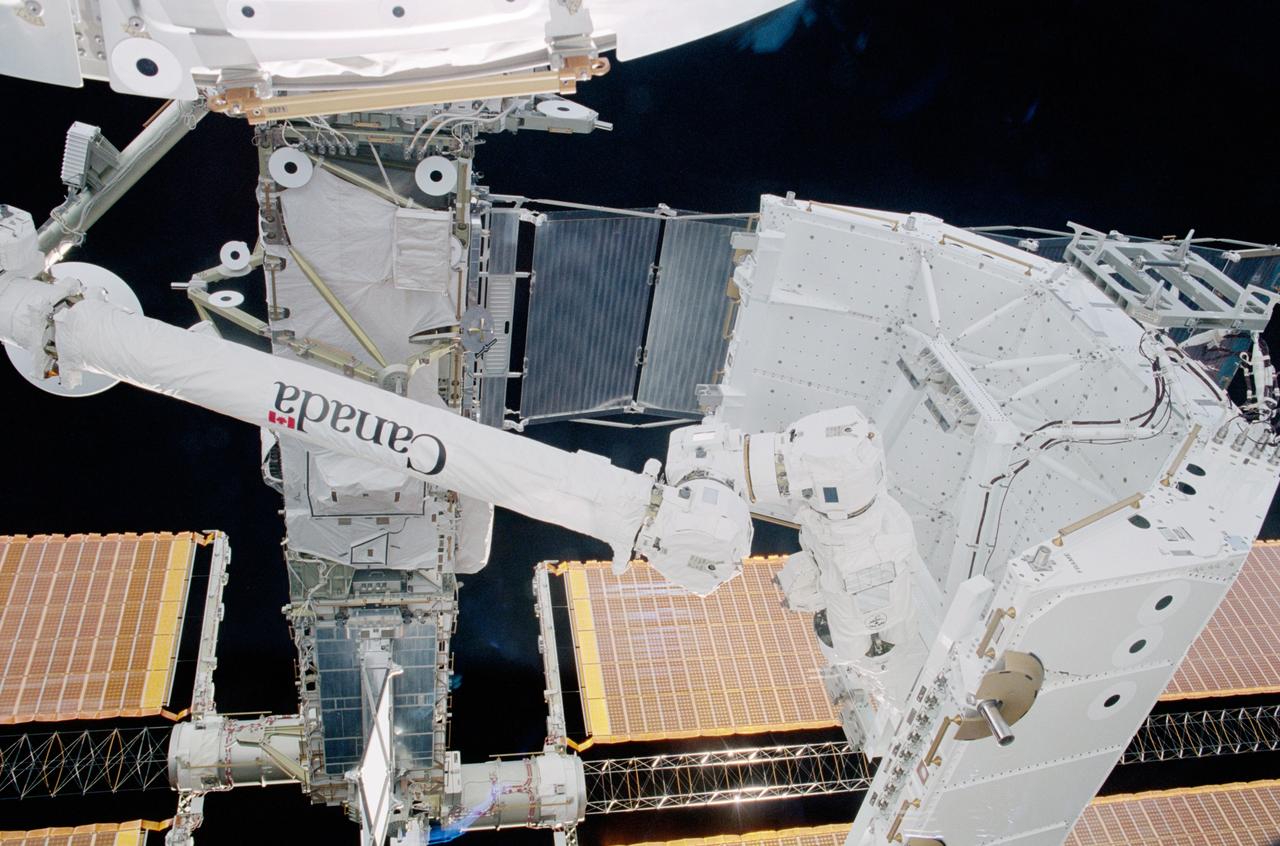
STS111-E-5183 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
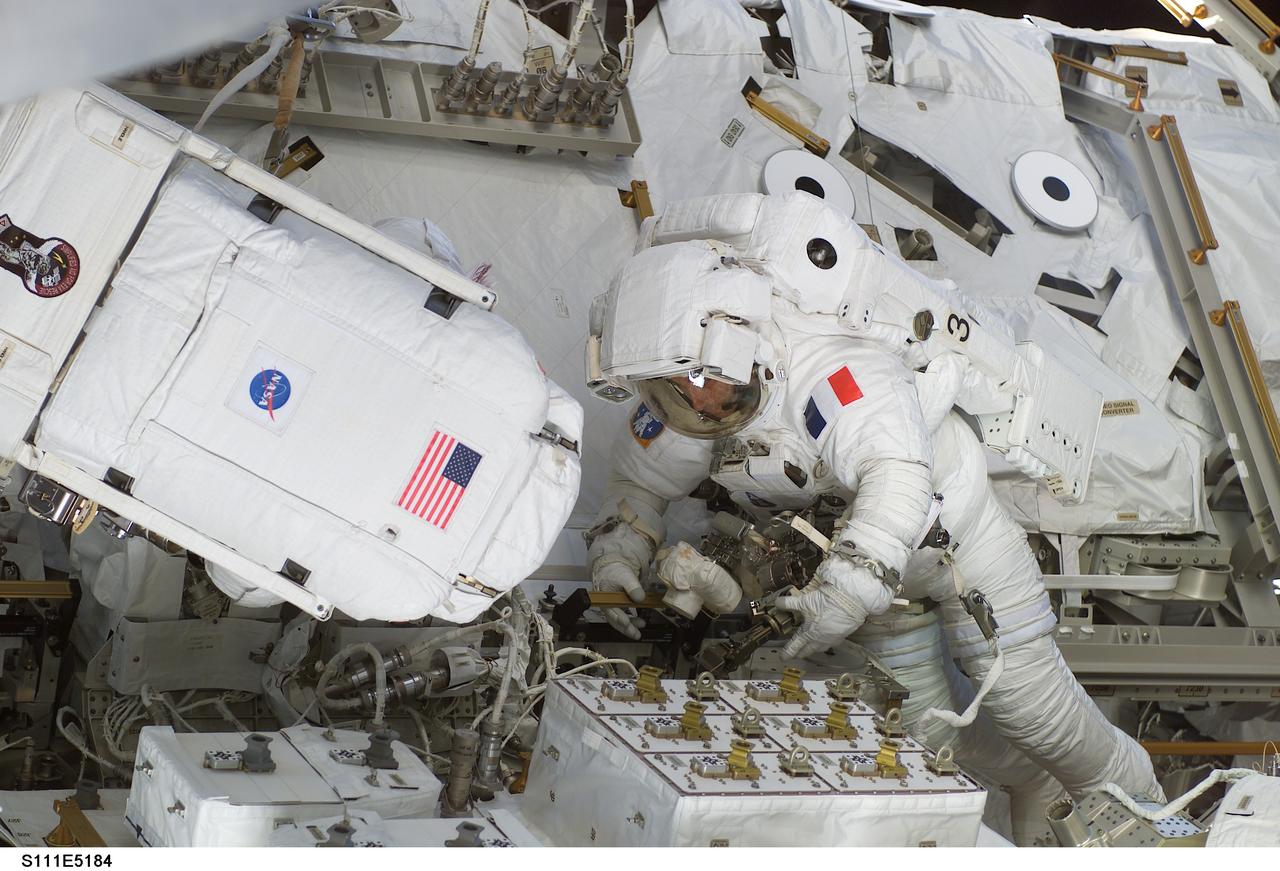
STS111-E-5184 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.

Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: night, Auroras, long shutters. Part of the Space Station Remote Manipulator System (SSRMS) arm is visible.

Earth Observation taken during a night pass by the Expedition 40 crew aboard the International Space Station (ISS). Folder lists this as: HDR night series (New Zealand pass). The Space Station Remote Manipulator System (SSRMS) arm is visible. Aurora visible over Earth limb.

ISS004-E-8623 (14 March 2002) --- Astronaut Carl E. Walz, Expedition Four flight engineer, works the controls of the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory on the International Space Station (ISS). This image was taken with a digital still camera.

ISS004-E-8652 (14 March 2002) --- Astronaut Daniel W. Bursch, Expedition Four flight engineer, works the controls of the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory on the International Space Station (ISS). This image was taken with a digital still camera.

Earth observation taken during day pass by an Expedition 37 crew member on board the International Space Station (ISS). Part of Space Station Remote Manipulator System (SSRMS) arm visible. Identified via Twitter message as sunrise.

ISS006-E-43973 (6 April 2003) --- Backdropped against a blue and white Earth, the Space Station Remote Manipulator System (SSRMS) or Canadarm2 is pictured in this digital still camera’s view taken from the International Space Station (ISS).

ISS003-E-8086 (13 November 2001) --- Cosmonaut Mikhail Tyurin, Expedition Three flight engineer representing Rosaviakosmos, works the controls of the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory on the International Space Station (ISS). This image was taken with a digital still camera.

View of Space Station Remote Manipulator System (SSRMS) extended arm with a dark,cloudy Earth in the background. Photo was taken by an Expedition 36 crew member on board the International Space Station (ISS). Per Twitter message: #CanadaArm2 poised and ready to support capture of #HTV4 in just a couple weeks.
STS105-E-5341 (17 August 2001) --- Backdropped by a sunset, the Canadarm2 / Space Station Remote Manipulator System (SSRMS) is being operated by a crewmember from the International Space Station (ISS). This image was taken with a digital still camera through a window on the flight deck of the Space Shuttle Discovery by a STS-105 crewmember.

ISS006-E-39415 (17 March 2003) --- Astronaut Kenneth D. Bowersox, Expedition Six mission commander, works at the Space Station Remote Manipulator System (SSRMS) or Canadarm2 workstation as he talks into a communication system in the Destiny laboratory on the International Space Station (ISS).

ISS003-E-6606 (15 October 2001) --- Astronaut Frank L. Culbertson, Jr., Expedition Three mission commander, works the controls of the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory on the International Space Station (ISS). This image was taken with a digital still camera.
STS100-342-024 (19 April-1 May 2001) --- In the grasp of the newly installed Canadarm2, also known by its technical name, the Space Station Remote Manipulator System (SSRMS), the Spacelab pallet is carefully moved by crewmembers inside the International Space Station (ISS). Sunglint on the station's solar arrays can be seen in the background.

ISS006-E-39746 (19 March 2003) --- Backdropped against the blackness of space, the Space Station Remote Manipulator System (SSRMS) or Canadarm2 is pictured in this digital still camera’s view taken from the International Space Station (ISS).

STS100-385-009 (19 April-1 May 2001) --- Extended by a crewmember on the International Space Station (ISS), the Space Station Remote Manipulator System (SSRMS) is backdropped by the blackness of space and the Earth's horizon while handling the Spacelab pallet.

S104-E-5114 (16 July 2001) --- Janet L. Kavandi, STS-104 mission specialist, looks over the Canadarm2, Space Station Remote Manipulator System (SSRMS), control station in the Destiny laboratory during STS-104's visit to the International Space Station (ISS).

STS100-343-001 (19 April-1 May 2001) --- Extended by a crewmember on the International Space Station (ISS), the Space Station Remote Manipulator System (SSRMS) is backdropped by the blackness of space and the Earth's horizon. A portion of the International Space Station's solar array can be seen in the lower left.
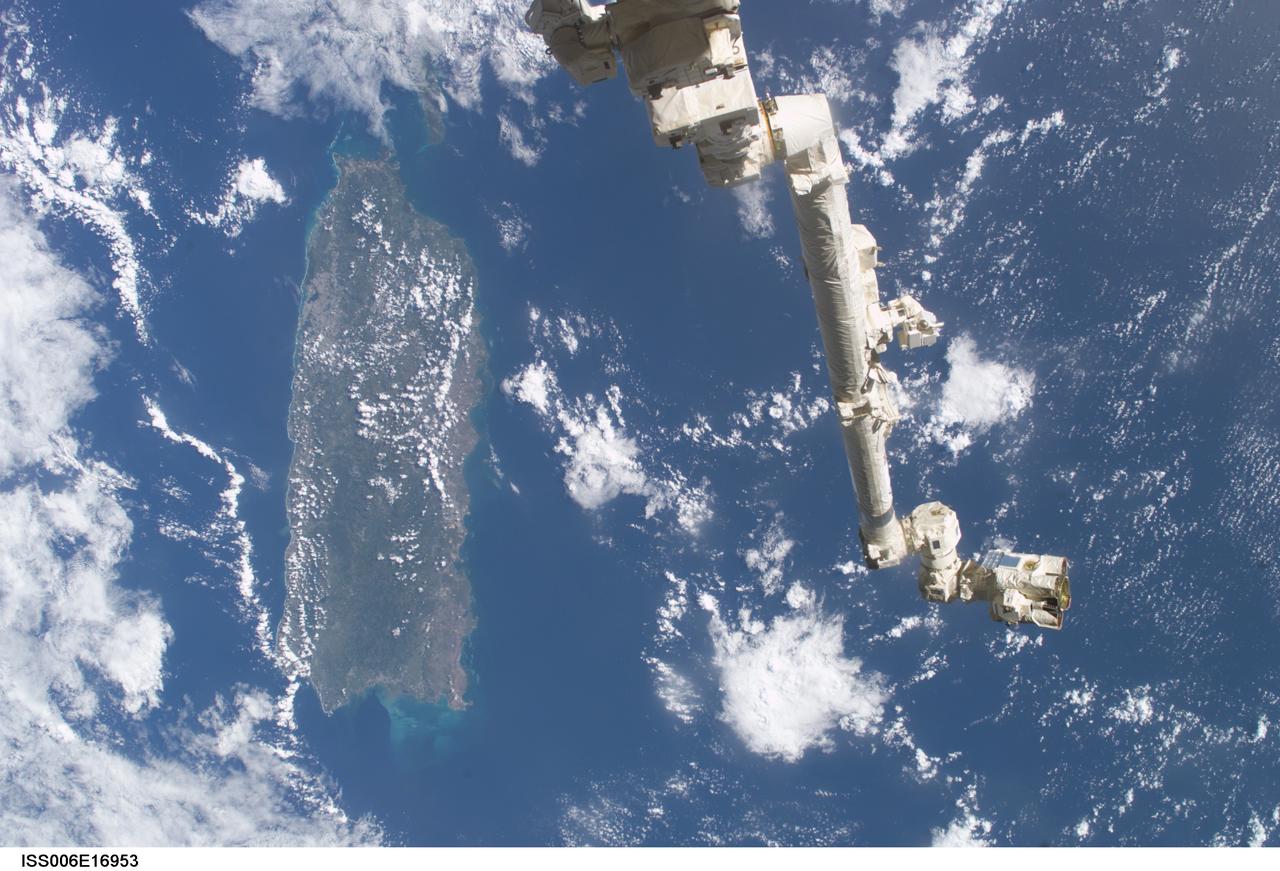
ISS006-E-16953 (9 January 2003) --- The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is backdropped against the Caribbean Sea in this digital still camera's view taken from the International Space Station (ISS). Puerto Rico is in the left side of the frame.

ISS007-E-15333 (23 September 2003) --- Cosmonaut Yuri I. Malenchenko, Expedition 7 mission commander, works at the Space Station Remote Manipulator System (SSRMS) or Canadarm2 workstation in the Destiny laboratory on the International Space Station (ISS). Malenchenko represents Rosaviakosmos.

Earth observation taken during night pass by an Expedition 36 crew member on board the International Space Station (ISS). Space Station Remote Manipulator System (SSRMS) arm is visible in the foreground. Per twitter message: Sunrise casts blue on #Canadarm2.

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS011-E-05598 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (partially obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS011-E-05592 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

NASA astronaut Shane Kimbrough participates in a live broadcast on Periscope about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS008-E-22137 (24 April 2004) --- Cosmonaut Gennady I. Padalka (foreground), Expedition 9 commander, and astronaut Edward M. (Mike) Fincke, NASA ISS science officer and flight engineer, participate in a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS). Padalka represents Russia’s Federal Space Agency.

NASA astronaut Shane Kimbrough gives Nikola a fist bump after a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)
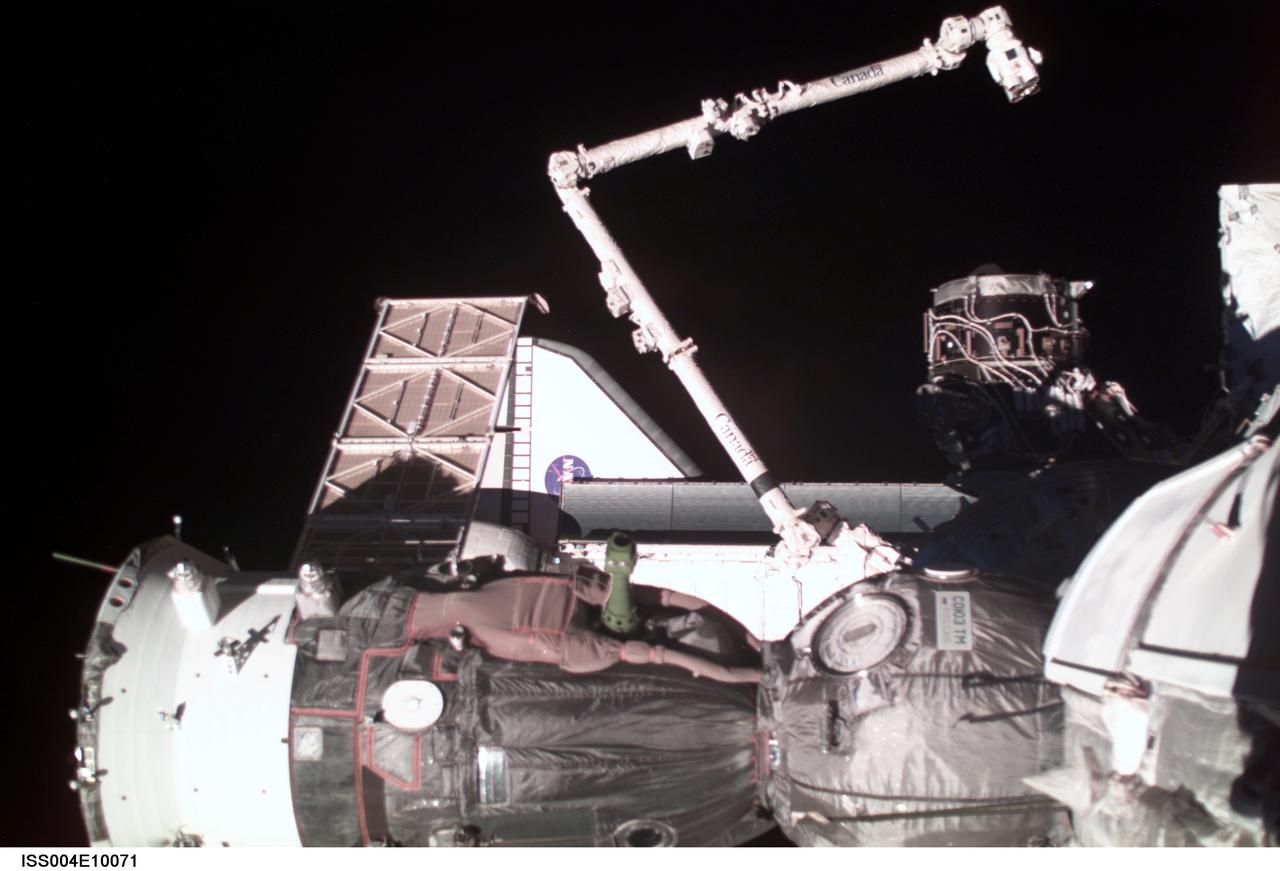
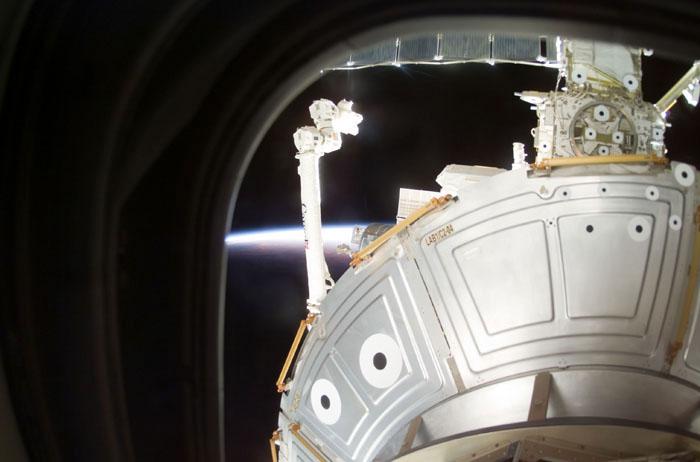
ISS004-E-10071 (17 April 2002) --- Moments prior to the undocking of the Space Shuttle Atlantis from the International Space Station (ISS), an Expedition Four crewmember took this digital still photograph from a window in the Pirs Docking Compartment. The STS-110 crew spent about a week aboard the ISS and successfully installed the S0 (S-zero) truss. Also visible in this image are the Soyuz Spacecraft, Space Station Remote Manipulator System (SSRMS) / Canadarm2 and Pressurized Mating Adapter 3 (PMA3).
The main objective of the STS-100 mission, the sixth International Space Station (ISS) assembly flight, was the delivery and installation of the Canadian-built Space Station Remote Manipulator System (SSRMS), or Canadarm2. In this photograph, astronaut Chris A. Hadfield, mission specialist representing the Canadian Space Agency (CSA), is seen near the Canadarm2, as the new tool for the ISS grasps the space lab pallet. STS-100 launched April 19, 2001 aboard the Space Shuttle Orbiter Endeavour for an 11 day mission.

ISS011-E-05601 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (partially obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

NASA astronaut Shane Kimbrough is seen after providing a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS002-E-5891 (21 April 2001) --- A distant view of the Space Shuttle Endeavour preparing to dock with the International Space Station (ISS) during the STS-100 mission. The STS-100 crewmembers are delivering the Canadarm2, Space Station Remote Manipulator System (SSRMS), and equipment stowed in the Multipurpose Logistics Module (MPLM) Raphaello to the ISS which are visible in Endeavour's payload bay. The image was taken with a digital still camera.
iss058e013773 (2/15/2019) --- A view of the Astrobee docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS011-E-05596 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS011-E-05589 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS011-E-05600 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

iss059e072518 (5/23/2019) --- Canadian Space Agency (CSA) astronaut David Saint-Jacques is photographed working with the free-flying Astrobee cube named Bumble and the docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.

ISS011-E-05599 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS011-E-05590 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough speaks to an audience member after giving a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)
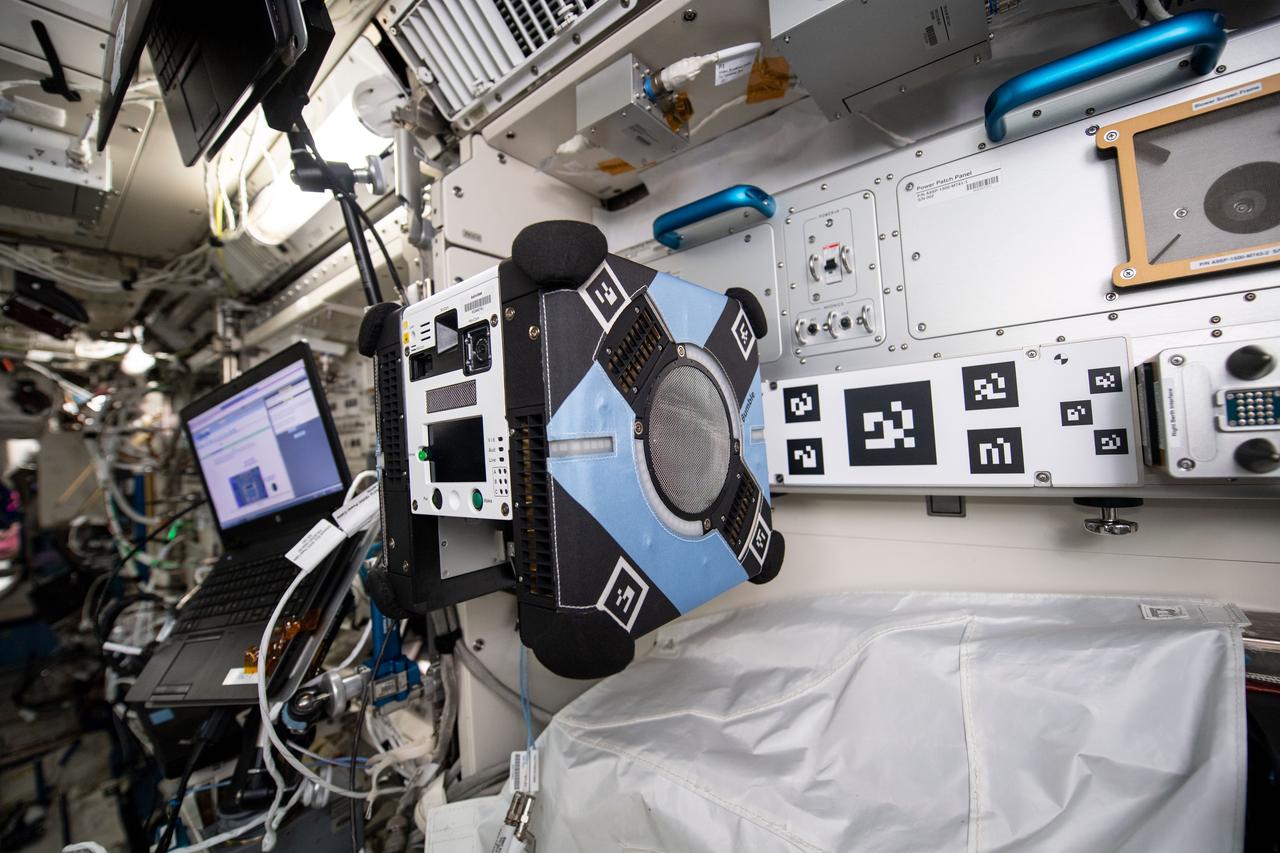
iss059e038119 (4/30/2019) --- A view of the free-flying Astrobee cube named Bumble and the docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.

NASA astronaut Shane Kimbrough speaks to an audience member after giving a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS011-E-05591 (6 May 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer, and cosmonaut Sergei K. Krikalev (obscured), commander representing Russia's Federal Space Agency, participate in a proficiency training session with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS009-E-10554 (4 June 2004) --- Astronaut Edward M. (Mike) Fincke, Expedition 9 NASA ISS science officer and flight engineer, holds the spare Remote Power Controller Module (RPCM) in the Quest airlock of the International Space Station (ISS). The spare is scheduled to replace the failed RPCM on the S0 (S-Zero) Truss.

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS009-E-05255 (1 May 2004) --- Cosmonaut Gennady I. Padalka (right), Expedition 9 commander representing Russia’s Federal Space Agency, looks over a procedures checklist near the Space Station Remote Manipulator System (SSRMS) or Canadarm2 workstation as he talks into a communication system in the Destiny laboratory on the International Space Station (ISS). Astronaut Edward M. (Mike) Fincke, NASA ISS science officer and flight engineer, assisted Padalka.

ISS002-E-5887 (21 April 2001) --- A view of the Space Shuttle Endeavour preparing to dock with the International Space Station (ISS) during the STS-100 mission. The STS-100 crewmembers are delivering the Canadarm2, Space Station Remote Manipulator System (SSRMS), and equipment stowed in the Multipurpose Logistics Module (MPLM) Raphaello to the ISS which are visible in Endeavour's payload bay. The image was taken with a digital still camera.

NASA astronaut Shane Kimbrough participates in a STEM in 30 piece about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS009-E-10551 (4 June 2004) --- Astronaut Edward M. (Mike) Fincke, Expedition 9 NASA ISS science officer and flight engineer, moves the Zero-G Storage Rack (ZSR) in the Destiny laboratory of the International Space Station (ISS) in order to retrieve the spare Remote Power Controller Module (RPCM), scheduled to replace the failed RPCM on the S0 (S-Zero) Truss. Fincke is positioned above the ZSR, which has been pulled from the Express Rack.

Audience members raise their hands to ask NASA astronaut Shane Kimbrough a question about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

ISS002-E-5876 (21 April 2001) --- A distant view of the Space Shuttle Endeavour preparing to dock with the International Space Station (ISS) during the STS-100 mission. The STS-100 crewmembers are delivering the Canadarm2, Space Station Remote Manipulator System (SSRMS), and equipment stowed in the Multipurpose Logistics Module (MPLM) Raphaello to the ISS which are visible in Endeavour's payload bay. The image was taken with a digital still camera.

NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

iss059e072476 (5/23/2019) --- A view of the free-flying Astrobee cube named Bumble and the docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.

ISS008-E-22157 (24 April 2004) --- Astronaut C. Michael Foale (left), Expedition 8 commander and NASA ISS science officer, take cosmonaut Gennady I. Padalka (partially obscured), Expedition 9 commander, and astronaut Edward M. (Mike) Fincke, NASA ISS science officer and flight engineer, through a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS). Padalka represents Russia’s Federal Space Agency.

ISS008-E-22156 (24 April 2004) --- Astronaut C. Michael Foale (left), Expedition 8 commander and NASA ISS science officer, take cosmonaut Gennady I. Padalka (partially obscured), Expedition 9 commander, and astronaut Edward M. (Mike) Fincke, NASA ISS science officer and flight engineer, through a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS). Padalka represents Russia’s Federal Space Agency.
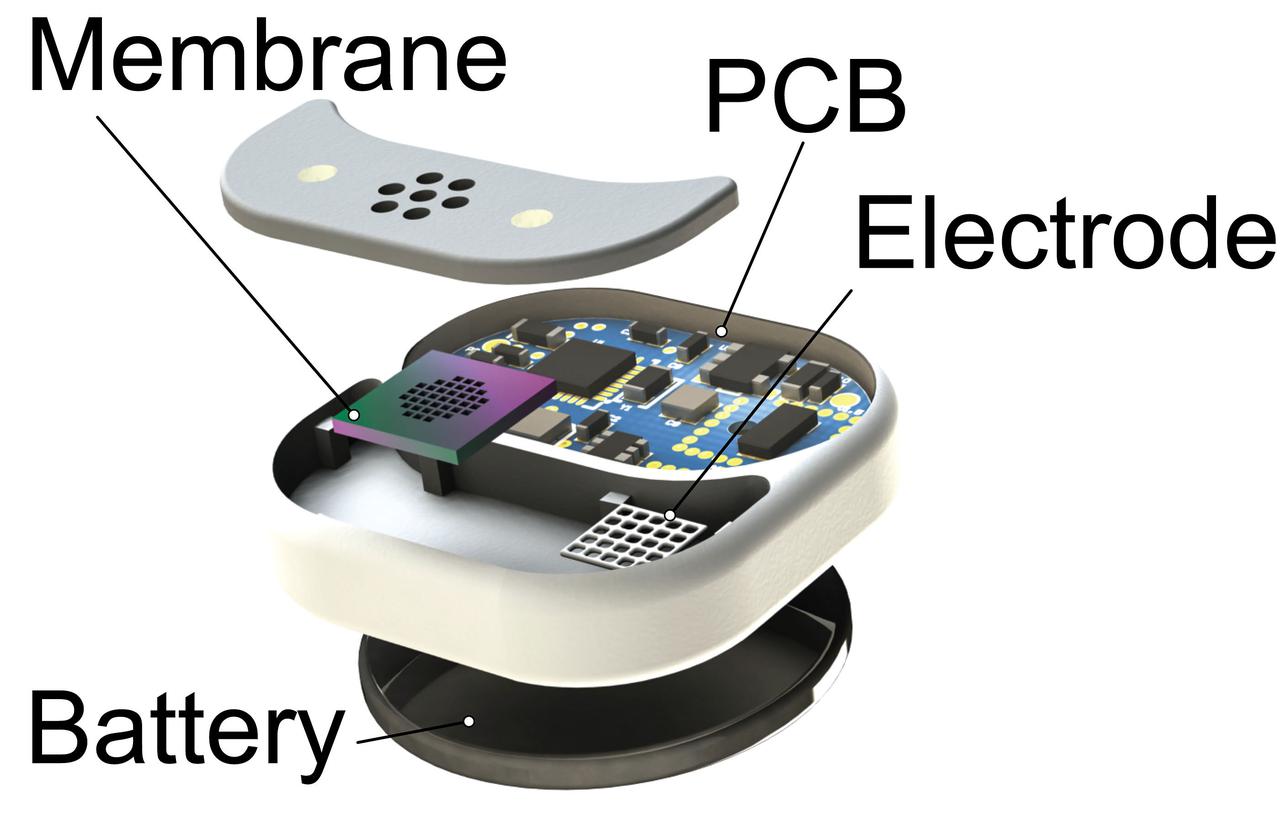
sc2021e037282 (8/20/2021) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute

jsc2021e037284 (4/9/2020) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute
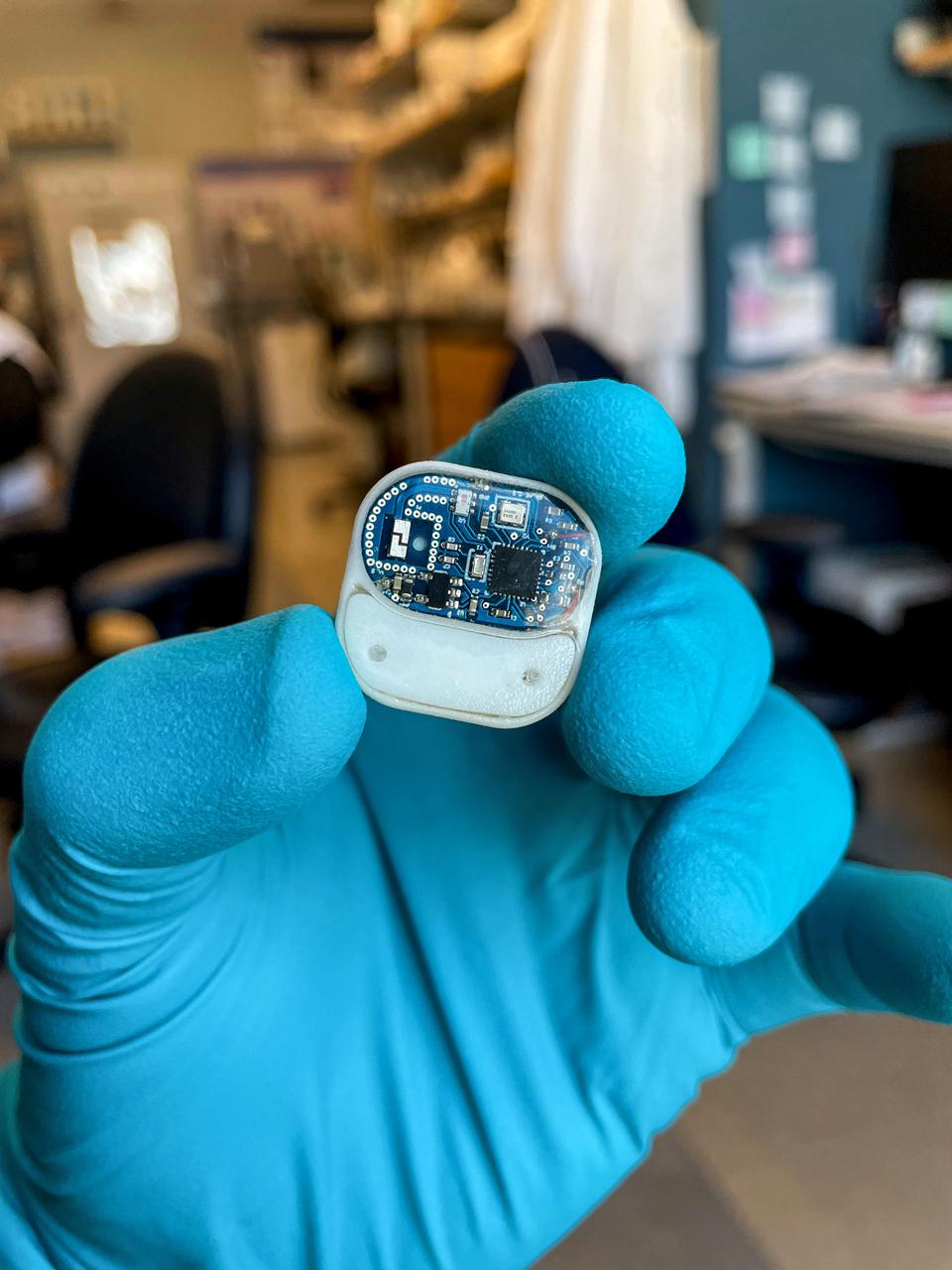
jsc2021e037283 (8/11/2021) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute

An audience member wearing a spacesuit joins NASA astronaut Shane Kimbrough onstage for a photo during a presentation about Kimbrough's time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough presents a montage of photos and the Expedition 50 patch to the Arlington Tech High School who hosted his presentation on his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)
A young audience member examines the photo of NASA astronaut Shane Kimbrough during a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

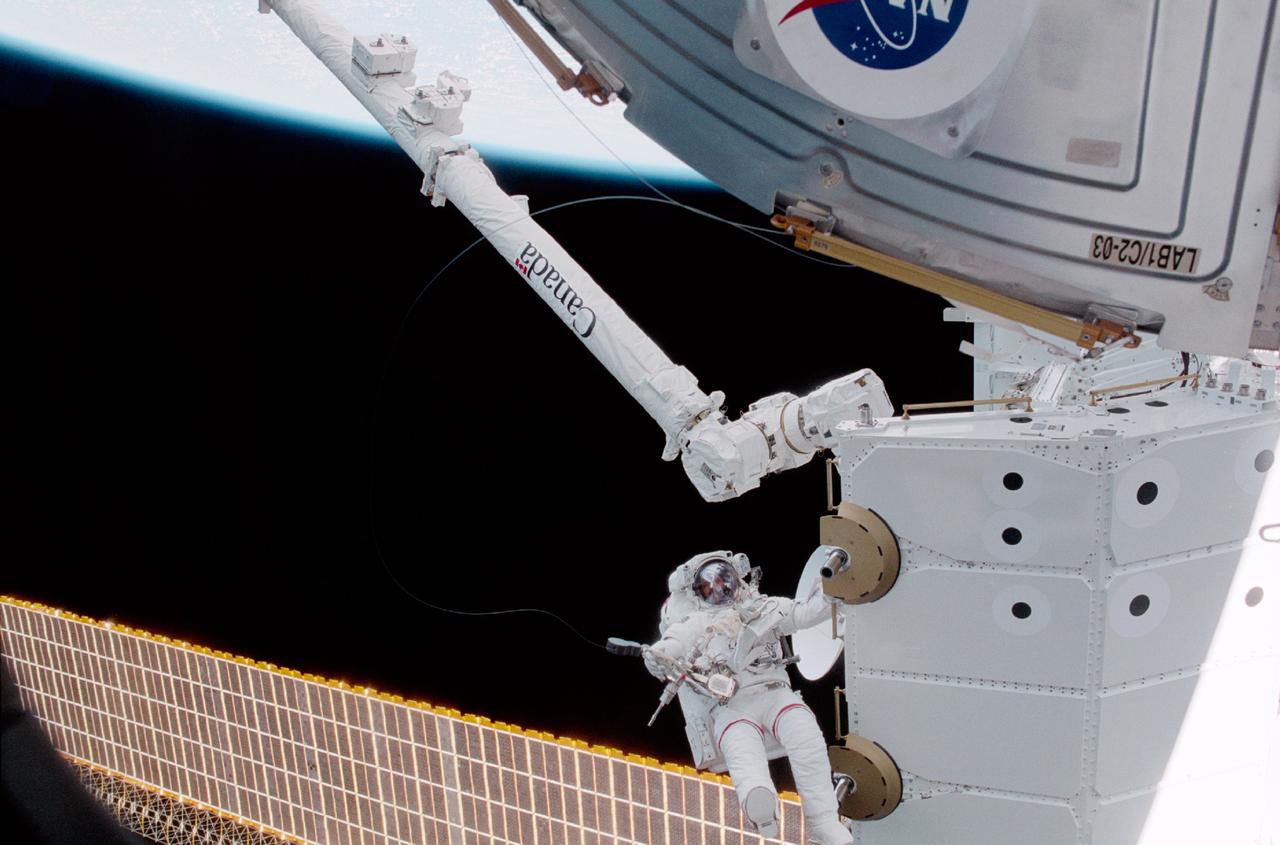
STS096-330-004 (30 May 1999) --- Astronaut Tamara E. Jernigan, mission specialist, is backdropped over the Aegean Sea as she handles the American-built crane which she helped to install on the International Space Station (ISS) during the May 30th space walk. Jernigan's feet are anchored to a mobile foot restraint connected to the Space Shuttle Discovery's Canadian-built Remote Manipulator System (RMS). Jernigan was joined by astronaut Daniel T. Barry, mission specialist, for the lengthy extravehicular activity (EVA). Parts of Greece, Turkey and the Dardenelles are visible some 171 nautical miles below the docked tandem of Discovery and the ISS.

A young audience member listens while NASA astronaut Shane Kimbrough speaks about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Smithsonian's National Air and Space Museum in Washington. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough poses for a photo with a an audience member after giving a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

NASA astronaut Shane Kimbrough calls on an audience member who has a question during a presentation about his time onboard the International Space Station (ISS) during Expeditions 49/50, Tuesday, September 12, 2017 at Arlington Career Center in Arlington, Virginia. During Expedition 50, Kimbrough completed four spacewalks for a total of 39 hours outside the ISS, and concluded his 173-day mission when he landed in a remote area near the town of Zhezkazgan, Kazakhstan in April 2017. Photo Credit: (NASA/Aubrey Gemignani)

Workers in the in the Space Station Processing Facility move two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement.. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000
Workers guide a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) in the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

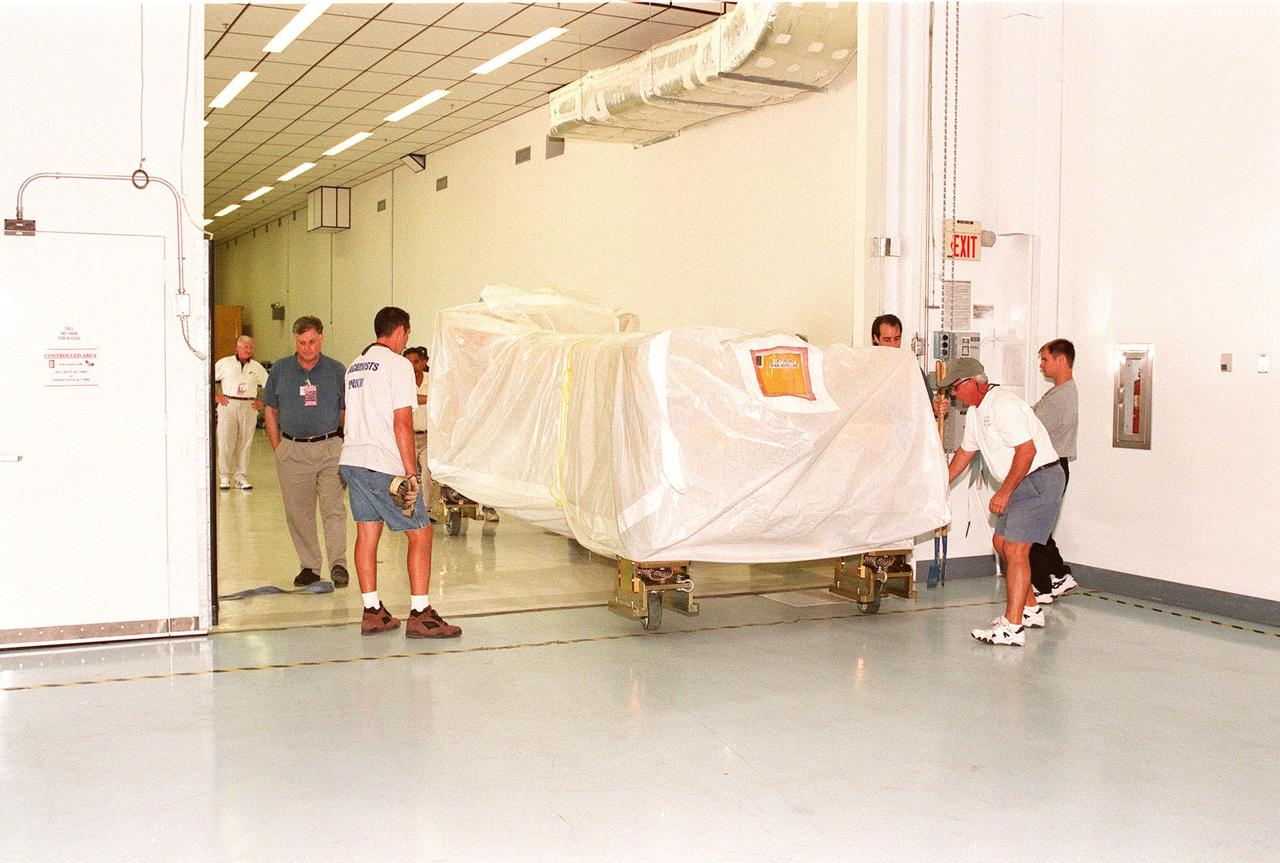
Workers move a box containing a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) into the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at the Space Station Processing Facility at KSC to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
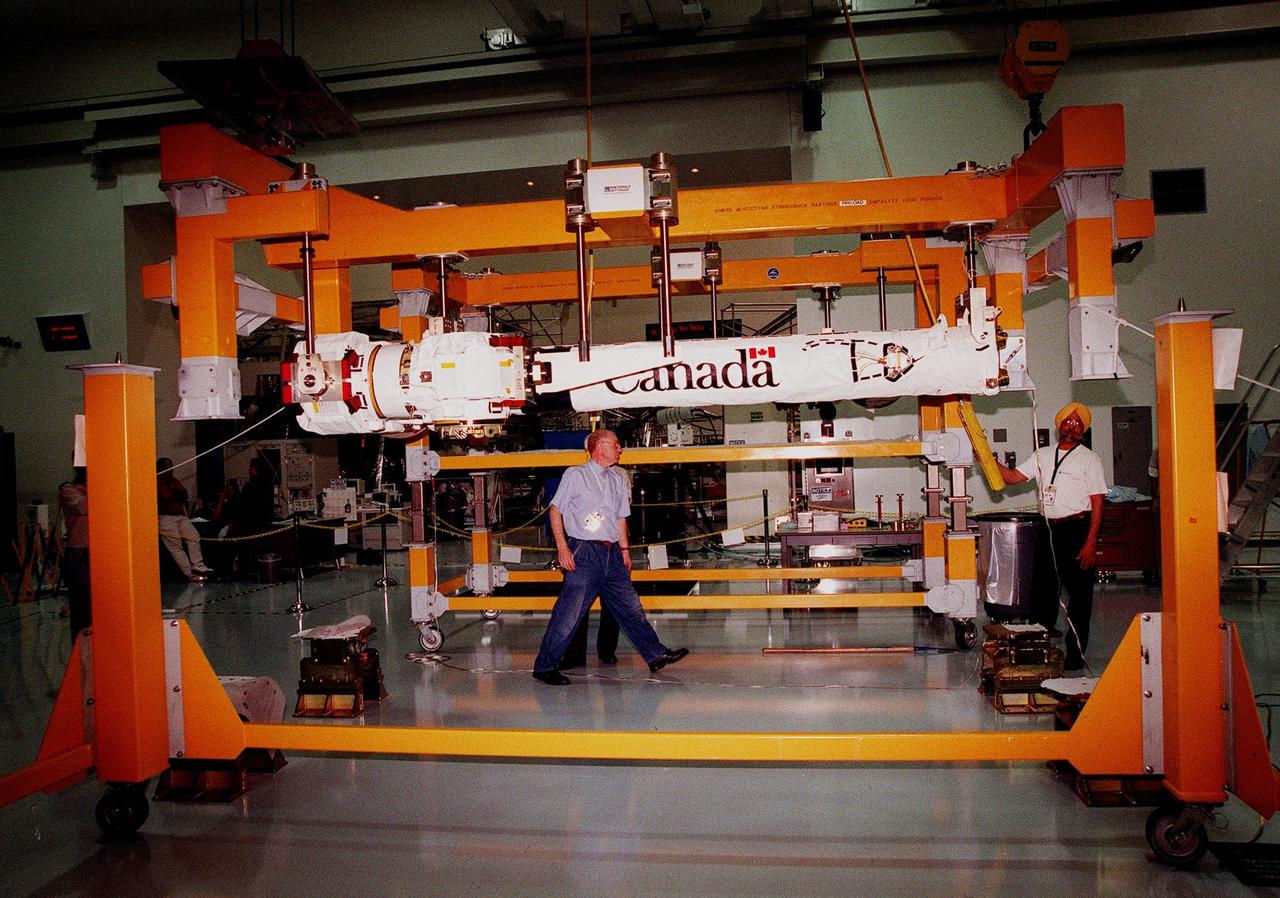
Workers in the Space Station Processing Facility raise a segment of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to move it to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000
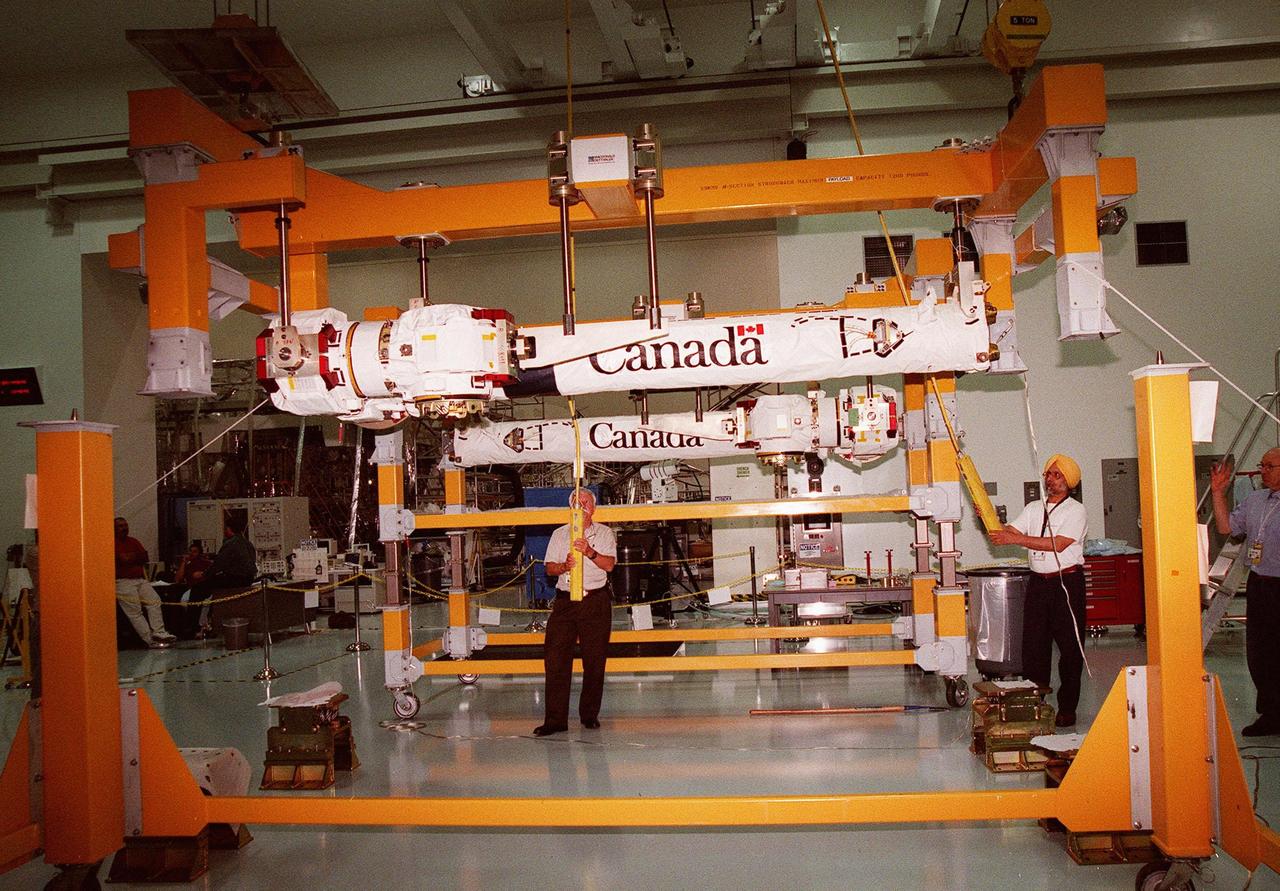
Workers in the Space Station Processing Facility raise two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000