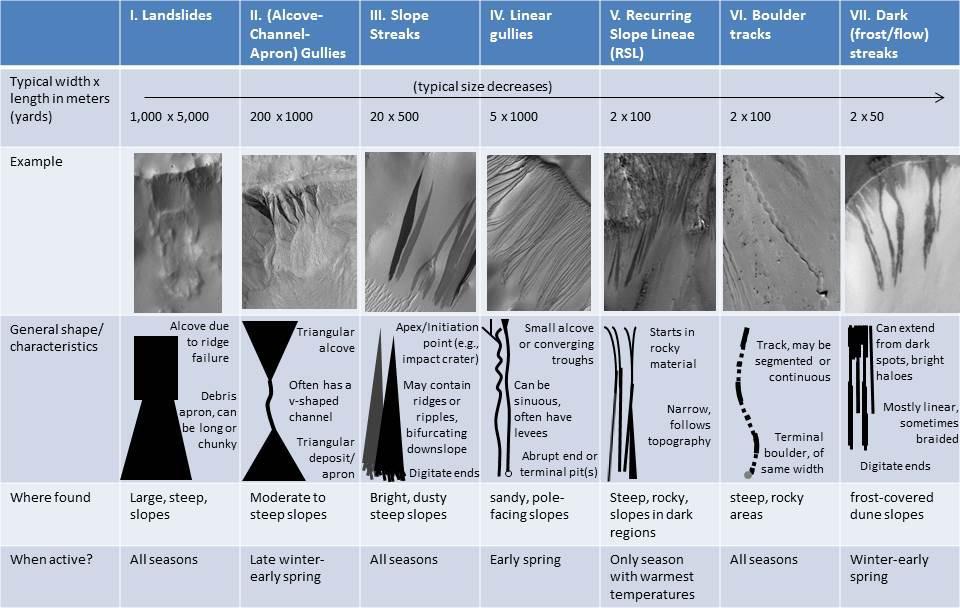
As on the Earth, many processes can move material down a Martian slope. This graphic compares seven different types of features observed on Mars that appear to result from material flowing or sliding or rolling down slopes.
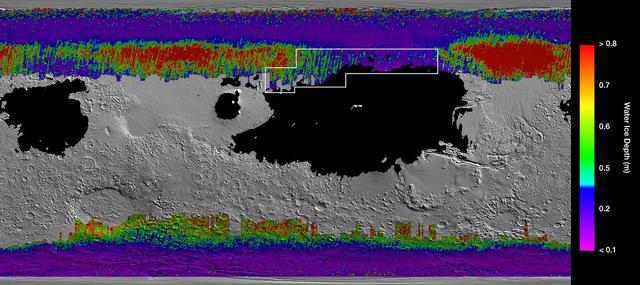
This rainbow-colored map shows underground water ice on Mars. Cool colors represent less than one foot (30 centimeters) below the surface; warm colors are over two feet (60 centimeters) deep. Sprawling black zones on the map represent areas where a landing spacecraft would sink into fine dust. The outlined box represents the ideal region to send astronauts for them to be able to dig up water ice. The map was created by combining data from multiple NASA orbiters, including the Mars Reconnaissance Orbiter and its Mars Climate Sounder instrument; Mars Odyssey and its Thermal Emission Imaging System; and the Mars Global Surveyor. https://photojournal.jpl.nasa.gov/catalog/PIA23514
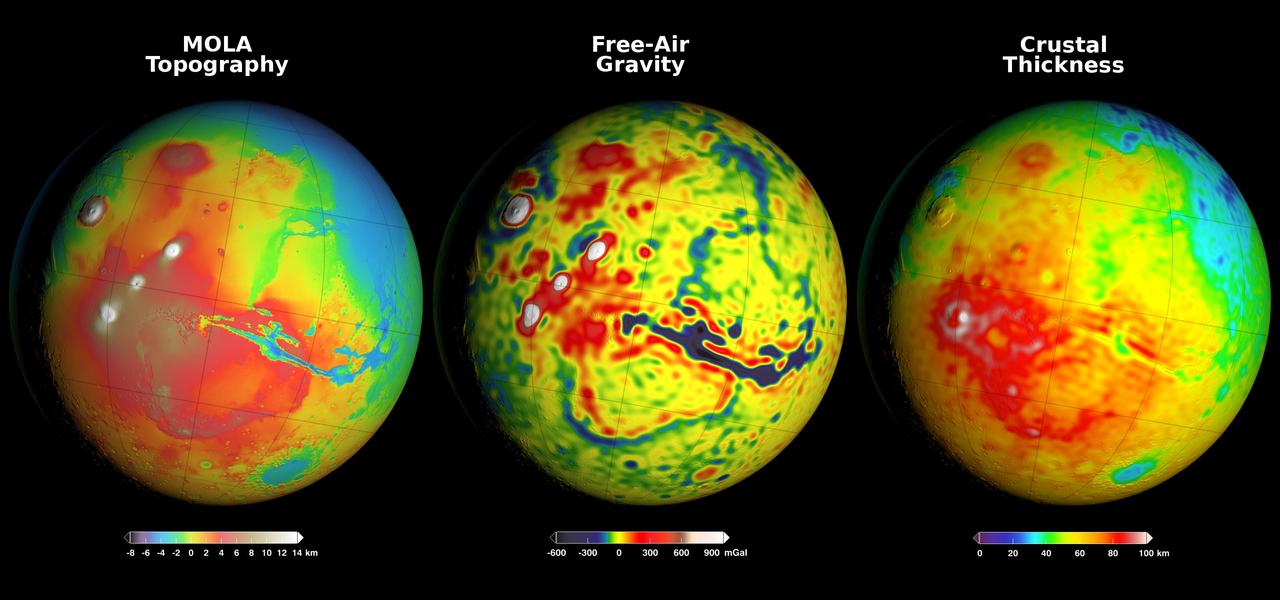
Newly detailed mapping of local variations in Mars' gravitational pull on orbiters (center), combined with topographical mapping of the planet's mountains and valleys (left) yields the best-yet mapping of Mars' crustal thickness (right). These three views of global mapping are centered at 90 degrees west longitude, showing portions of the planet that include tall volcanoes on the left and the deep Valles Marineris canyon system just right of center. Additional views of these global maps are available at http://svs.gsfc.nasa.gov/goto?4436. The new map of Mars' gravity (center) results from analysis of the planet's gravitational effects on orbiters passing over each location on the globe. The data come from many years of using NASA's Deep Space Network to track positions and velocities of NASA's Mars Global Surveyor, Mars Odyssey and Mars Reconnaissance Orbiter. If Mars were a perfectly smooth sphere of uniform density, the gravity experienced by the spacecraft would be exactly the same everywhere. But like other rocky bodies in the solar system, including Earth, Mars has both a bumpy surface and a lumpy interior. As the spacecraft fly in their orbits, they experience slight variations in gravity caused by both of these irregularities, variations which show up as small changes in the velocity and altitude of the three spacecraft. The "free-air" gravity map presents the results without any adjustment for the known bumpiness of Mars' surface. Local gravitational variations in acceleration are expressed in units called gals or galileos. The color-coding key beneath the center map indicates how colors on the map correspond to mGal (milligal) values. The map on the left shows the known bumpiness, or topography, of the Martian surface, using data from the Mars Orbiter Laser Altimeter (MOLA) instrument on Mars Global Surveyor. Mars has no actual "sea level," but does have a defined zero elevation level. The color-coding key beneath this map indicates how the colors correspond to elevations above or below zero, in kilometers. Analysis that subtracts effects of the surface topography from the free-air gravity mapping, combined with an assumption that crust material has a uniform density, leads to the derived mapping of crustal thickness -- or subsurface "lumpiness" -- on the right. Highs in gravity indicate places where the denser mantle material beneath the crust is closer to the surface, and hence where the crust is thinner. The color-coding key for this map indicates how the colors on the map correspond to the thickness of the crust, in kilometers. http://photojournal.jpl.nasa.gov/catalog/PIA20277
![This image from NASA's Mars Reconnaissance Orbiter (MRO) shows Mars' surface in detail. Mars has captured the imagination of astronomers for thousands of years, but it wasn't until the last half a century that we were able to capture images of its surface in detail. This particular site on Mars was first imaged in 1965 by the Mariner 4 spacecraft during the first successful fly-by mission to Mars. From an altitude of around 10,000 kilometers, this image (the ninth frame taken) achieved a resolution of approximately 1.25 kilometers per pixel. Since then, this location has been observed by six other visible cameras producing images with varying resolutions and sizes. This includes HiRISE (highlighted in yellow), which is the highest-resolution and has the smallest "footprint." This compilation, spanning Mariner 4 to HiRISE, shows each image at full-resolution. Beginning with Viking 1 and ending with our HiRISE image, this animation documents the historic imaging of a particular site on another world. In 1976, the Viking 1 orbiter began imaging Mars in unprecedented detail, and by 1980 had successfully mosaicked the planet at approximately 230 meters per pixel. In 1999, the Mars Orbiter Camera onboard the Mars Global Surveyor (1996) also imaged this site with its Wide Angle lens, at around 236 meters per pixel. This was followed by the Thermal Emission Imaging System on Mars Odyssey (2001), which also provided a visible camera producing the image we see here at 17 meters per pixel. Later in 2012, the High-Resolution Stereo Camera on the Mars Express orbiter (2003) captured this image of the surface at 25 meters per pixel. In 2010, the Context Camera on the Mars Reconnaissance Orbiter (2005) imaged this site at about 5 meters per pixel. Finally, in 2017, HiRISE acquired the highest resolution image of this location to date at 50 centimeters per pixel. When seen at this unprecedented scale, we can discern a crater floor strewn with small rocky deposits, boulders several meters across, and wind-blown deposits in the floors of small craters and depressions. This compilation of Mars images spanning over 50 years gives us a visual appreciation of the evolution of orbital Mars imaging over a single site. The map is projected here at a scale of 50 centimeters (19.7 inches) per pixel. [The original image scale is 52.2 centimeters (20.6 inches) per pixel (with 2 x 2 binning); objects on the order of 156 centimeters (61.4 inches) across are resolved.] North is up. https://photojournal.jpl.nasa.gov/catalog/PIA22115](https://images-assets.nasa.gov/image/PIA22115/PIA22115~medium.jpg)
This image from NASA's Mars Reconnaissance Orbiter (MRO) shows Mars' surface in detail. Mars has captured the imagination of astronomers for thousands of years, but it wasn't until the last half a century that we were able to capture images of its surface in detail. This particular site on Mars was first imaged in 1965 by the Mariner 4 spacecraft during the first successful fly-by mission to Mars. From an altitude of around 10,000 kilometers, this image (the ninth frame taken) achieved a resolution of approximately 1.25 kilometers per pixel. Since then, this location has been observed by six other visible cameras producing images with varying resolutions and sizes. This includes HiRISE (highlighted in yellow), which is the highest-resolution and has the smallest "footprint." This compilation, spanning Mariner 4 to HiRISE, shows each image at full-resolution. Beginning with Viking 1 and ending with our HiRISE image, this animation documents the historic imaging of a particular site on another world. In 1976, the Viking 1 orbiter began imaging Mars in unprecedented detail, and by 1980 had successfully mosaicked the planet at approximately 230 meters per pixel. In 1999, the Mars Orbiter Camera onboard the Mars Global Surveyor (1996) also imaged this site with its Wide Angle lens, at around 236 meters per pixel. This was followed by the Thermal Emission Imaging System on Mars Odyssey (2001), which also provided a visible camera producing the image we see here at 17 meters per pixel. Later in 2012, the High-Resolution Stereo Camera on the Mars Express orbiter (2003) captured this image of the surface at 25 meters per pixel. In 2010, the Context Camera on the Mars Reconnaissance Orbiter (2005) imaged this site at about 5 meters per pixel. Finally, in 2017, HiRISE acquired the highest resolution image of this location to date at 50 centimeters per pixel. When seen at this unprecedented scale, we can discern a crater floor strewn with small rocky deposits, boulders several meters across, and wind-blown deposits in the floors of small craters and depressions. This compilation of Mars images spanning over 50 years gives us a visual appreciation of the evolution of orbital Mars imaging over a single site. The map is projected here at a scale of 50 centimeters (19.7 inches) per pixel. [The original image scale is 52.2 centimeters (20.6 inches) per pixel (with 2 x 2 binning); objects on the order of 156 centimeters (61.4 inches) across are resolved.] North is up. https://photojournal.jpl.nasa.gov/catalog/PIA22115
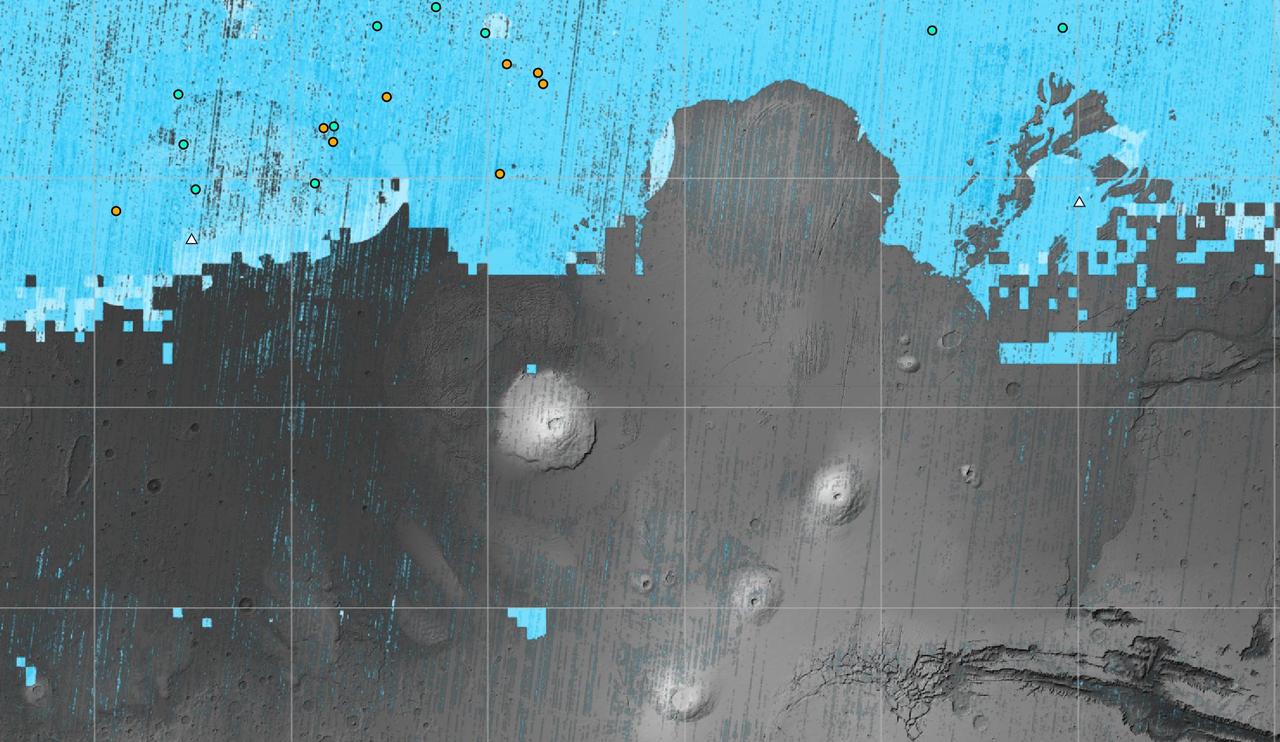
The blue areas on this map of Mars show regions where NASA missions have detected subsurface water ice. Scientists can use the map – part of the Subsurface Water Ice Mapping project, or SWIM – to decide where the first astronauts to set foot on the Red Planet should land. Triangles on the map are past and present Mars missions; circles are ice-exposing impact craters. Mars has both water ice and carbon dioxide ice (dry ice); water ice would be a critical resource for the first astronauts to step foot on Mars, who can use it for drinking, rocket fuel, and other purposes. The more water ice these astronauts land next to, the less they need to bring with them. Because the Martian atmosphere is so thin – less than 1% the pressure experienced at sea level on Earth – liquid water is unstable on the Red Planet and will vaporize unless it's frozen. But water ice on the planet's surface is only stable at high latitudes that are far too cold for astronauts and robots to survive. So SWIM attempts to locate water ice preserved within the subsurface in the mid-latitudes, where landing would be feasible. Such regions are far enough toward the pole for water ice to be plentiful, but close enough to the equator to avoid the coldest temperatures seen on Mars. SWIM combines data from several NASA missions, including the Mars Reconnaissance Orbiter (MRO), 2001 Mars Odyssey, and the now-inactive Mars Global Surveyor. The project mapped the area from the equator to 60 degrees north latitude. https://photojournal.jpl.nasa.gov/catalog/PIA26045