
Several projects supporting NASA's Advanced Air Mobility or AAM mission are working on different elements to help make AAM a reality and one of these research areas is automation. This concept graphic shows how elements of automation could be integrated into a future airspace. Technology like this could enable vehicles to operate without a pilot, or if a pilot is in the loop, increase the safety.
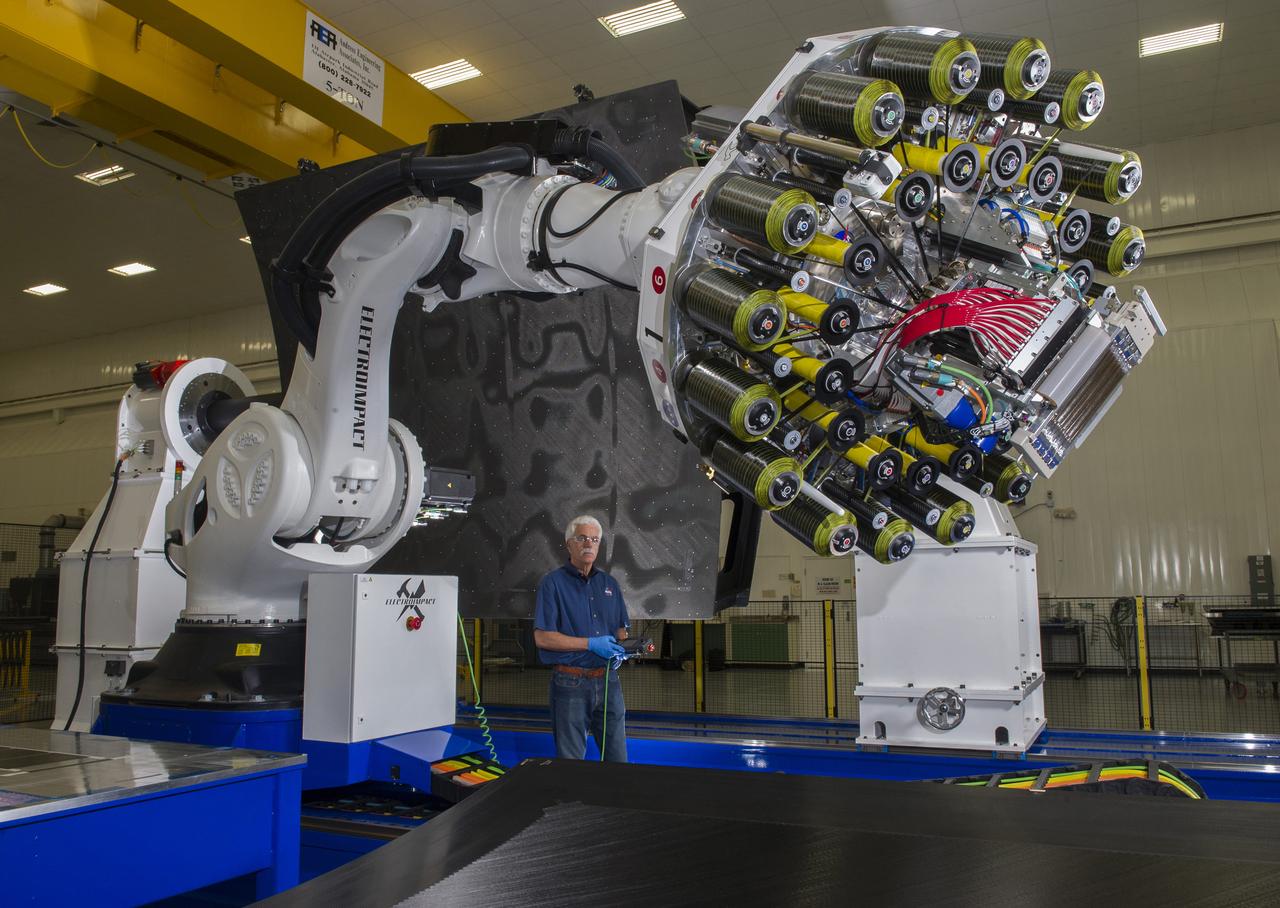
MATERIALS ENGINEER LARRY PELHAM OF NASA’S MARSHALL SPACE FLIGHT CENTER IN HUNTSVILLE, ALABAMA, OPERATES THE CEUS AUTOMATED FIBER PLACEMENT CYLINDRICAL MANUFACTURING TOOL IN BUILDING 4707. THE TOOL WILL BE USED BY THE COMPOSITES FOR EXPLORATION UPPER STAGE PROJECT AT MARSHALL, WHICH IS ANALYZING COMPOSITE MATERIALS TO SUPPORT FUTURE HARDWARE FOR NASA’S SPACE LAUNCH SYSTEM AND OTHER NEXT-GENERATION SPACECRAFT…
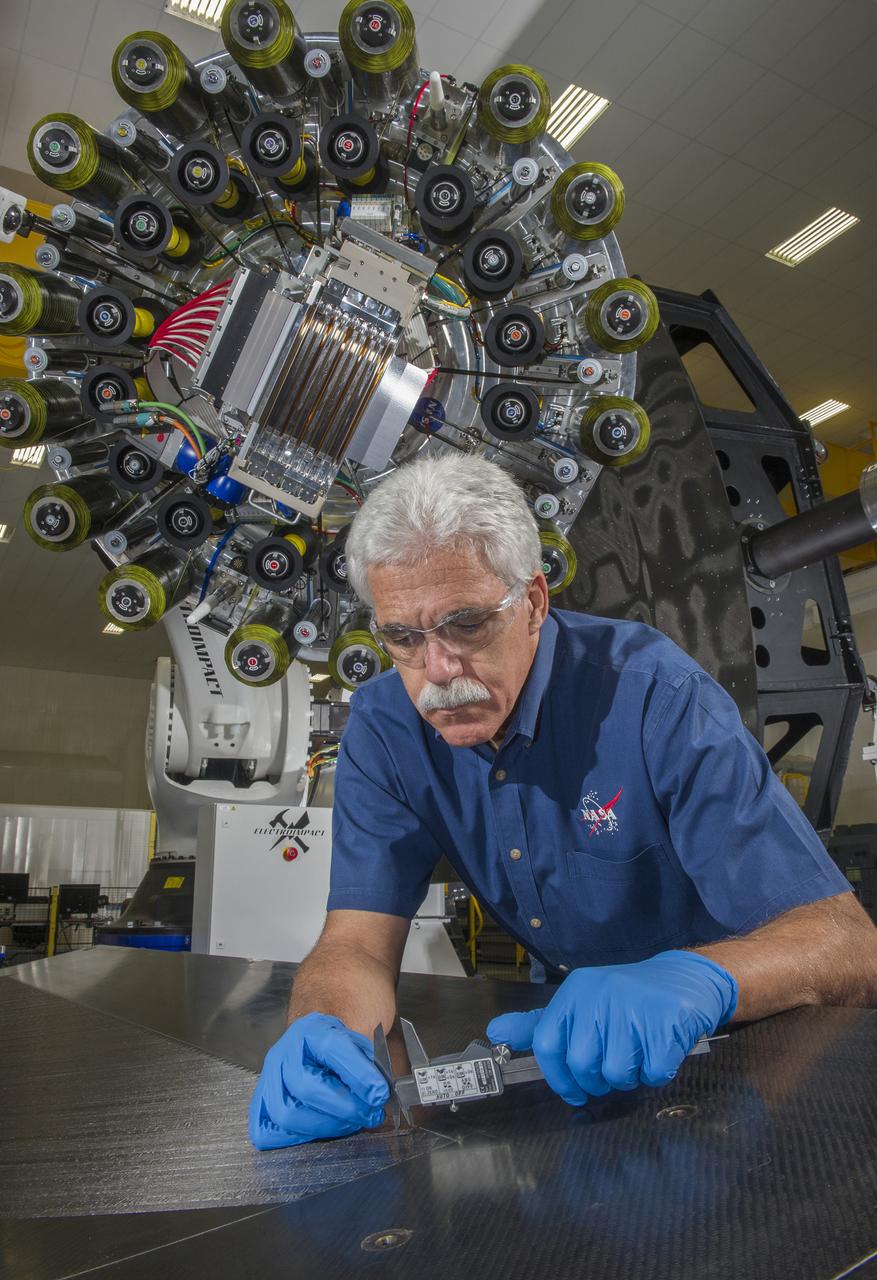
MATERIALS ENGINEER LARRY PELHAM OF NASA’S MARSHALL SPACE FLIGHT CENTER IN HUNTSVILLE, ALABAMA, OPERATES THE CEUS AUTOMATED FIBER PLACEMENT CYLINDRICAL MANUFACTURING TOOL IN BUILDING 4707. THE TOOL WILL BE USED BY THE COMPOSITES FOR EXPLORATION UPPER STAGE PROJECT AT MARSHALL, WHICH IS ANALYZING COMPOSITE MATERIALS TO SUPPORT FUTURE HARDWARE FOR NASA’S SPACE LAUNCH SYSTEM AND OTHER NEXT-GENERATION SPACECRAFT…

Participants listen to presentations during a two-day workshop, Aug. 6 and 7, 2019, focusing on robotics and automation in space crop production. The workshop was hosted by the Exploration Research and Technology Programs at NASA’s Kennedy Space Center in Florida. Participants from around the world and members of NASA, industry, academia and other government agencies met to share their knowledge to enable a common goal of sustaining human operations on the Moon, in deep space and eventually on Mars. Keynote speakers and representatives from different organizations presented data gleaned from their research.

Participants listen to presentations during a two-day workshop, Aug. 6 and 7, 2019, focusing on robotics and automation in space crop production. The workshop was hosted by the Exploration Research and Technology Programs at NASA’s Kennedy Space Center in Florida. Participants from around the world and members of NASA, industry, academia and other government agencies met to share their knowledge to enable a common goal of sustaining human operations on the Moon, in deep space and eventually on Mars. Keynote speakers and representatives from different organizations presented data gleaned from their research.
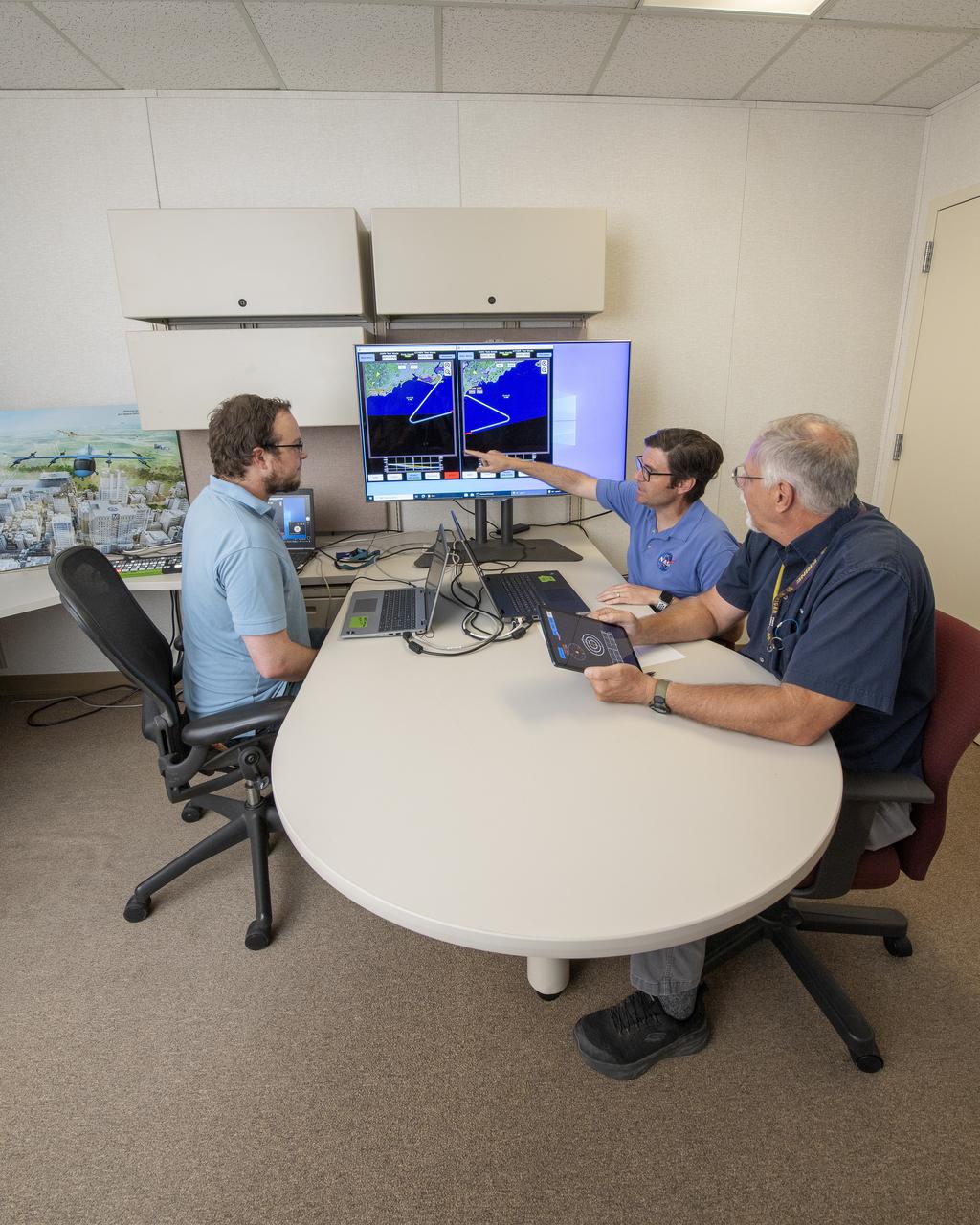
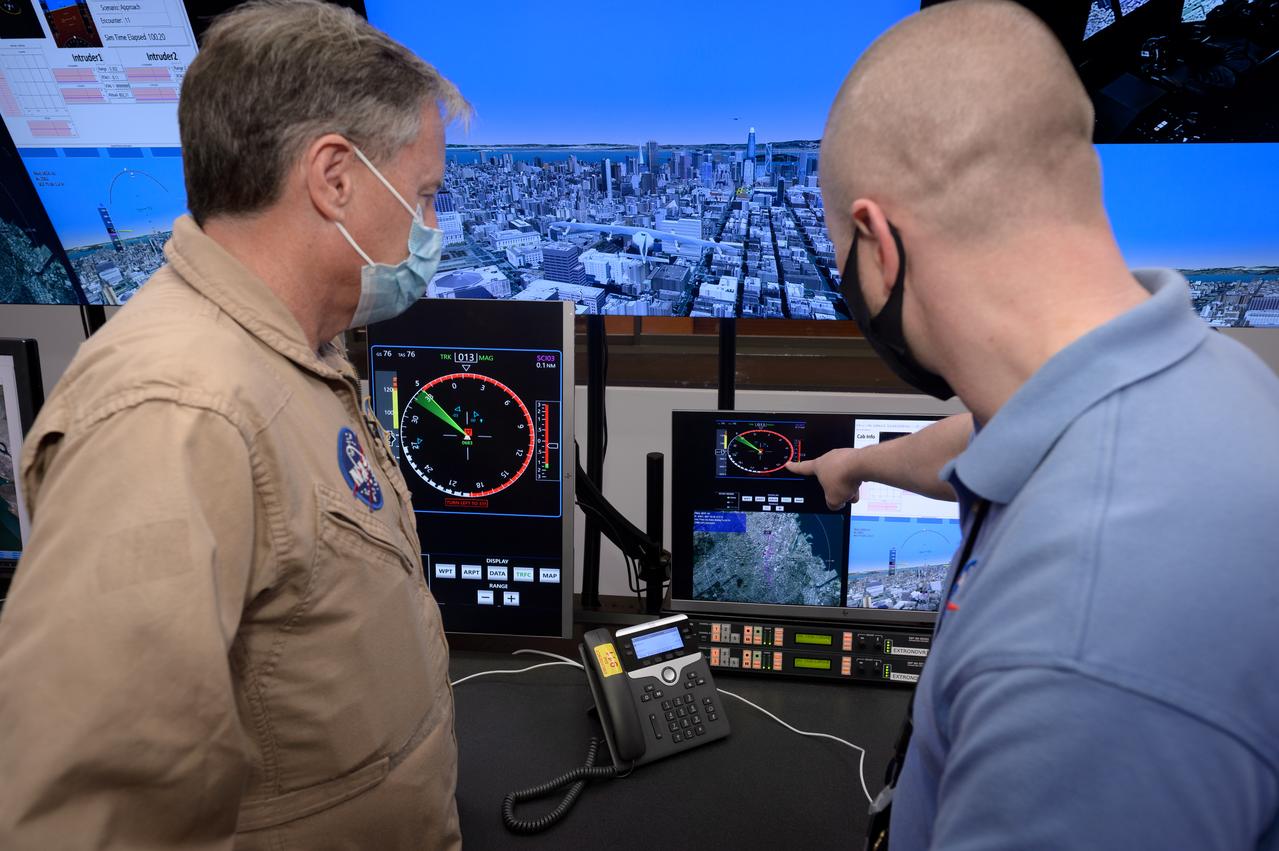
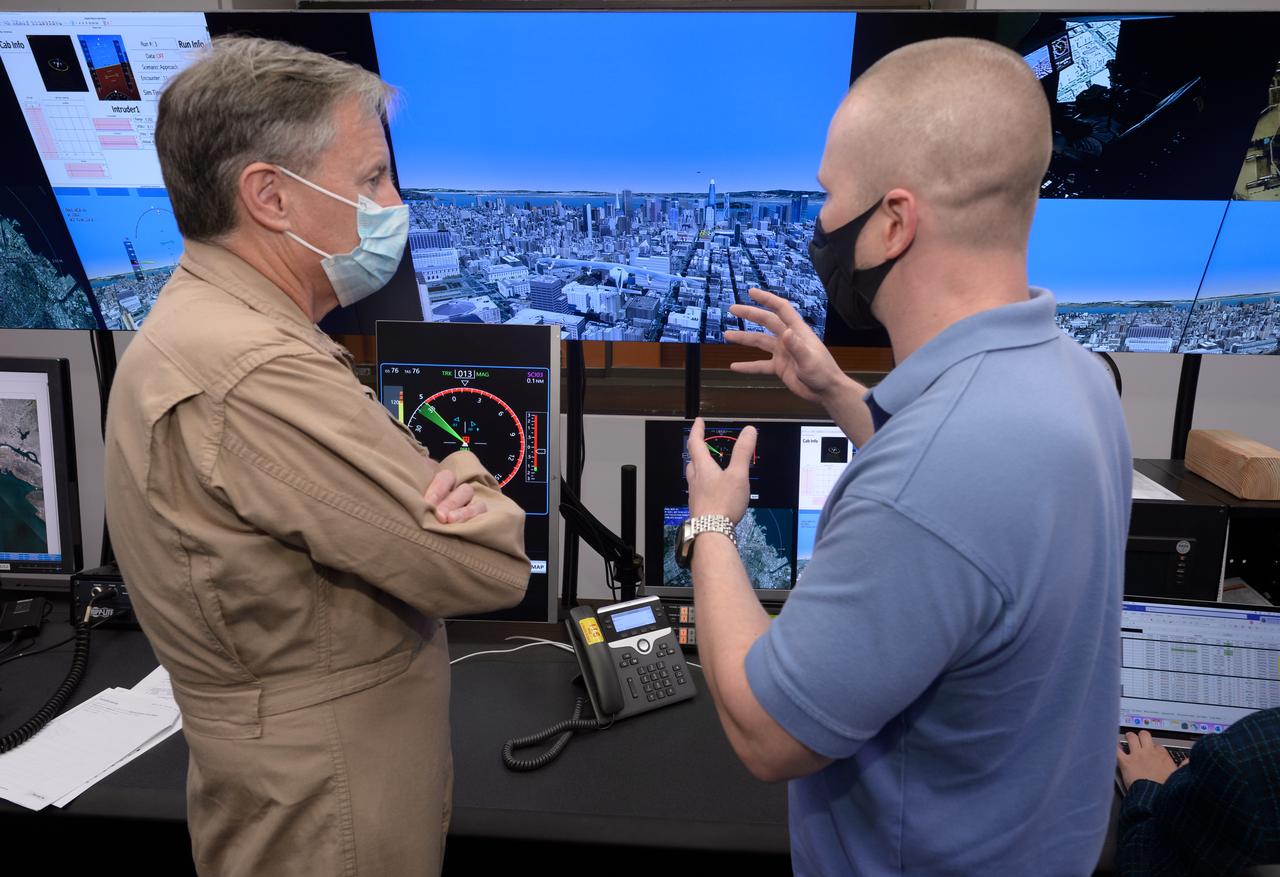
NASA software developer, Ethan Williams, left, pilot Scott Howe, and operations test consultant Jan Scofield run a flight path management software simulation at NASA’s Armstrong Flight Research Center in Edwards, California in May 2023. This simulation research supports the integration of automated systems for the advanced air mobility mission.

The Exploration Research and Technology Programs at NASA’s Kennedy Space Center in Florida hosted a two-day workshop, Aug. 6 and 7, 2019, focusing on robotics and automation in space crop production. Participants from around the world and members of NASA, industry, academia and other government agencies met to share their knowledge to enable a common goal of sustaining human operations on the Moon, in deep space and eventually on Mars. Keynote speakers and representatives from different organizations presented data gleaned from their research.. Murat Kacira, a professor in the Department of Agricultural and Biosystems Engineering and director of the Controlled Environment Agriculture Program at the University of Arizona presents to workshop attendees on Aug. 6.
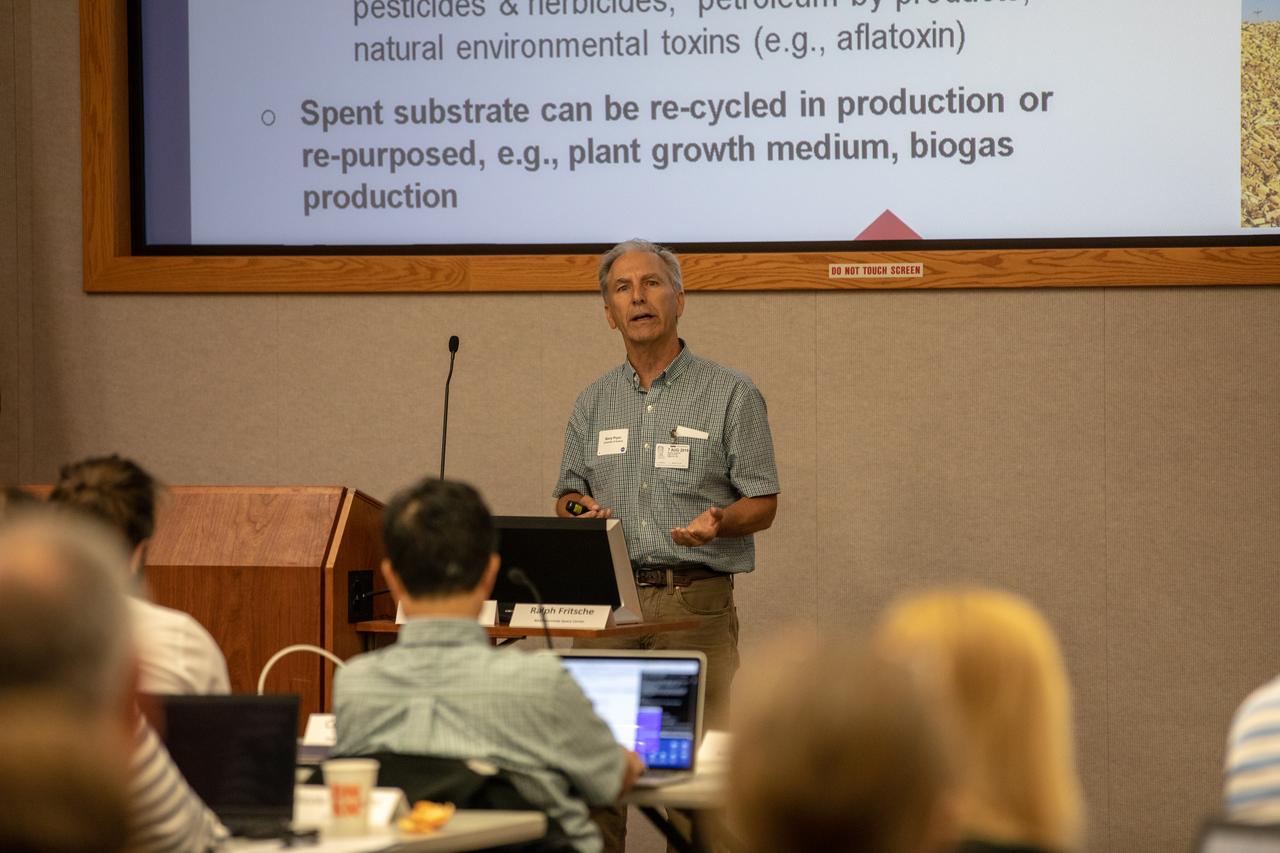
The Exploration Research and Technology Programs at NASA’s Kennedy Space Center in Florida hosted a two-day workshop, Aug. 6 and 7, 2019, focusing on robotics and automation in space crop production. Participants from around the world and members of NASA, industry, academia and other government agencies met to share their knowledge to enable a common goal of sustaining human operations on the Moon, in deep space and eventually on Mars. Keynote speakers and representatives from different organizations presented data gleaned from their research. Barry Pryor, a professor with the School of Plant Sciences at the University of Arizona presents to workshop attendees on Aug. 6.

iss046e046607 (2/23/2016) --- A view of the newly installed Space Automated Bioproduct Laboratory (SABL) power, data, and thermal connections in the rack located in the U.S Lab. SABL is an upgrade to the long standing ISS incubator, Commercial Generic Bioprocessing Apparatus (CGBA). The Space Automated Bioproduct Laboratory (SABL) supports a wide variety of experiments in the life, physical and material sciences with a focus on supporting research of biological systems and processes.
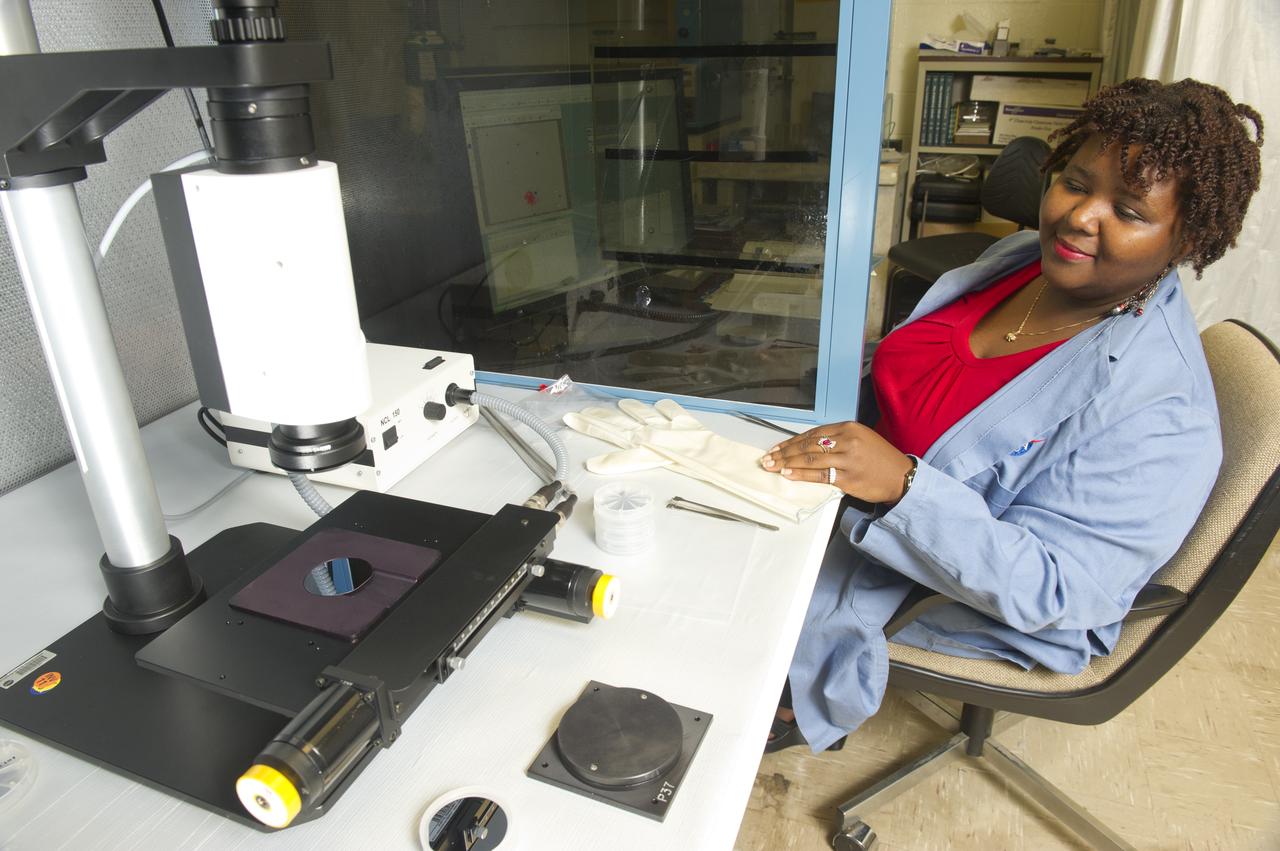
LAQUIETA HUEY WITH IMAGE ANALYSIS SYSTEM FOR AUTOMATED PARTICLE COUNTING.

The Exploration Research and Technology Programs at NASA’s Kennedy Space Center in Florida hosted a two-day workshop, Aug. 6 and 7, 2019, focusing on robotics and automation in space crop production. Participants from around the world and members of NASA, industry, academia and other government agencies met to share their knowledge to enable a common goal of sustaining human operations on the Moon, in deep space and eventually on Mars. Keynote speakers and representatives from different organizations presented data gleaned from their research. Murat Kacira, left, a professor in the Department of Agricultural and Biosystems Engineering and director of the Controlled Environment Agriculture Program at the University of Arizona, and Barry Pryor, a professor with the School of Plant Sciences, also at the University of Arizona, present to workshop attendees on Aug. 6.

ISS040-E-089820 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.

ISS040-E-089829 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.

ISS040-E-089798 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.

ISS040-E-091969 (13 Aug. 2014) --- Surrounded by stowage containers, European Space Agency astronaut Alexander Gerst, Expedition 40 flight engineer, is pictured in the newly-attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) of the International Space Station.

ISS040-E-091918 (13 Aug. 2014) --- European Space Agency astronaut Alexander Gerst, Expedition 40 flight engineer, prepares to remove the docking mechanism to gain access to the hatch of the newly attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5).

ISS040-E-092581 (12 Aug. 2014) --- A portion of the International Space Station?s Zvezda Service Module with the newly attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) is featured in this image photographed by an Expedition 40 crew member onboard the station. A waning full moon is visible in the background.

ISS040-E-092583 (12 Aug. 2014) --- A portion of the International Space Station?s Russian segment with the newly attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) to the Zvezda Service Module is featured in this image photographed by an Expedition 40 crew member onboard the station. A waning full moon is visible in the background.

ISS040-E-091979 (13 Aug. 2014) --- European Space Agency astronaut Alexander Gerst, Expedition 40 flight engineer, is pictured in the hatch after removing the docking mechanism of the newly-attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) of the International Space Station.

ISS040-E-091919 (13 Aug. 2014) --- European Space Agency astronaut Alexander Gerst, Expedition 40 flight engineer, prepares to remove the docking mechanism to gain access to the hatch of the newly attached "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5).

A NASA F/A-18 flies over the Dryden Flight Research Center and Rogers Dry Lake on December 11, 2002. The aircraft participated in the Automated Aerial Refueling (AAR) project. The 300-gallon aerial refueling store seen on the belly of the aircraft carries fuel and a refueling drogue. This aircraft acted as a tanker in the study to develop an aerodynamic model for future automated aerial refueling, especially of unmanned vehicles.

A NASA F/A-18 flies over the Dryden Flight Research Center and Rogers Dry Lake on December 11, 2002. The aircraft participated in the Automated Aerial Refueling (AAR) project. The 300-gallon aerial refueling store seen on the belly of the aircraft carries fuel and a refueling drogue. This aircraft acted as a tanker in the study to develop an aerodynamic model for future automated aerial refueling, especially of unmanned vehicles.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

A NASA F/A-18 flies over the Dryden Flight Research Center and Rogers Dry Lake on December 11, 2002. The aircraft participated in the Automated Aerial Refueling (AAR) project. The 300-gallon aerial refueling store seen on the belly of the aircraft carries fuel and a refueling drogue. This aircraft acted as a tanker in the study to develop an aerodynamic model for future automated aerial refueling, especially of unmanned vehicles.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

ISS017-E-015451 (5 Sept. 2008) --- Backdropped by Earth's horizon and the blackness of space, European Space Agency's (ESA) "Jules Verne" Automated Transfer Vehicle (ATV) begins its relative separation from the International Space Station. The ATV undocked from the aft port of the Zvezda Service Module at 4:29 p.m. (CDT) on Sept. 5, 2008 and was placed in a parking orbit for three weeks, scheduled to be deorbited on Sept. 29 when lighting conditions are correct for an ESA imagery experiment of reentry.

ISS017-E-015496 (5 Sept. 2008) --- Backdropped by a blanket of clouds, European Space Agency's (ESA) "Jules Verne" Automated Transfer Vehicle (ATV) continues its relative separation from the International Space Station. The ATV undocked from the aft port of the Zvezda Service Module at 4:29 p.m. (CDT) on Sept. 5, 2008 and was placed in a parking orbit for three weeks, scheduled to be deorbited on Sept. 29 when lighting conditions are correct for an ESA imagery experiment of reentry.
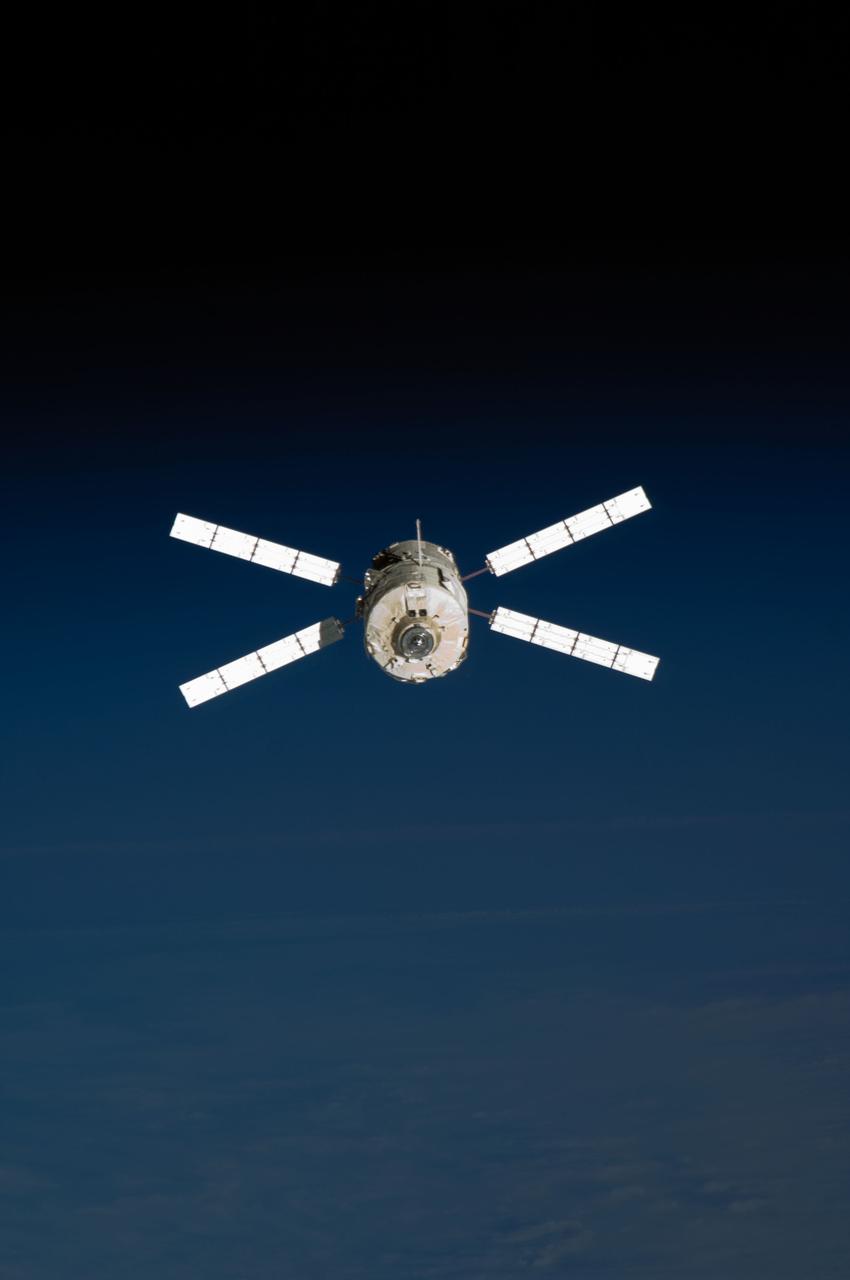
ISS017-E-015468 (5 Sept. 2008) --- Backdropped by the blackness of space, European Space Agency's (ESA) "Jules Verne" Automated Transfer Vehicle (ATV) begins its relative separation from the International Space Station. The ATV undocked from the aft port of the Zvezda Service Module at 4:29 p.m. (CDT) on Sept. 5, 2008 and was placed in a parking orbit for three weeks, scheduled to be deorbited on Sept. 29 when lighting conditions are correct for an ESA imagery experiment of reentry.

ISS017-E-015446 (5 Sept. 2008) --- Backdropped by the blackness of space, European Space Agency's (ESA) "Jules Verne" Automated Transfer Vehicle (ATV) begins its relative separation from the International Space Station. The ATV undocked from the aft port of the Zvezda Service Module at 4:29 p.m. (CDT) on Sept. 5, 2008 and was placed in a parking orbit for three weeks, scheduled to be deorbited on Sept. 29 when lighting conditions are correct for an ESA imagery experiment of reentry.
ISS040-E-091688 (12 Aug. 2014) --- In the Zvezda Service Module, European Space Agency astronaut Alexander Gerst (left) and Russian cosmonaut Alexander Skvortsov, both Expedition 40 flight engineers, monitor the approach and docking of ESA?s "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) to the International Space Station.

ISS040-E-091673 (12 Aug. 2014) --- In the Zvezda Service Module, European Space Agency astronaut Alexander Gerst (right) and Russian cosmonaut Alexander Skvortsov, both Expedition 40 flight engineers, take a brief moment for a photo during the approach and docking operations of ESA's "Georges Lemaitre" Automated Transfer Vehicle-5 (ATV-5) to the International Space Station.

ISS040-E-089627 (7 Aug. 2014) --- In the International Space Station?s Zvezda Service Module, European Space Agency astronaut Alexander Gerst (foreground) and Russian cosmonaut Alexander Skvortsov, both Expedition 40 flight engineers, participate in a training session in preparation for the rendezvous and docking of ESA?s fifth and final Automated Transfer Vehicle (ATV-5). Nicknamed the ?Georges Lemaitre? in honor of the Belgian physicist and astronomer who first proposed the Big Bang theory, ATV-5 will deliver more than seven tons of scientific experiments, food and other supplies when it docks to the aft end of Zvezda on Aug. 12.

The Stellar Automation Systems team poses for a picture with their robot after attempting the level one challenge during the 2014 NASA Centennial Challenges Sample Return Robot Challenge, Wednesday, June 11, 2014, at the Worcester Polytechnic Institute (WPI) in Worcester, Mass. Eighteen teams are competing for a $1.5 million NASA prize purse. Teams will be required to demonstrate autonomous robots that can locate and collect samples from a wide and varied terrain, operating without human control. The objective of this NASA-WPI Centennial Challenge is to encourage innovations in autonomous navigation and robotics technologies. Innovations stemming from the challenge may improve NASA's capability to explore a variety of destinations in space, as well as enhance the nation's robotic technology for use in industries and applications on Earth. Photo Credit: (NASA/Joel Kowsky)

AiroCide Ti02, an anthrax-killing air scrubber manufactured by KES Science and Technology Inc., in Kernesaw, Georgia, looks like a square metal box when it is installed on an office wall. Its fans draw in airborne spores and airflow forces them through a maze of tubes. Inside, hydroxyl radicals (OH-) attack and kill pathogens. Most remaining spores are destroyed by high-energy ultraviolet photons. Building miniature greenhouses for experiments on the International Space Station (ISS) has led to the invention of this device that annihilates anthrax-a bacteria that can be deadly when inhaled. The research enabling the invention started at the University of Wisconsin (Madison) Center for Space Automation and Robotics (WCSAR), one of 17 NASA Commercial Space Centers. A special coating technology used in the anthrax-killing invention is also being used inside WCSAR-built plant growth units on the ISS. This commercial research is managed by the Space Product Development Program at the Marshall Space Flight Center.
ASRF - Automated Science Research Facility Artwork
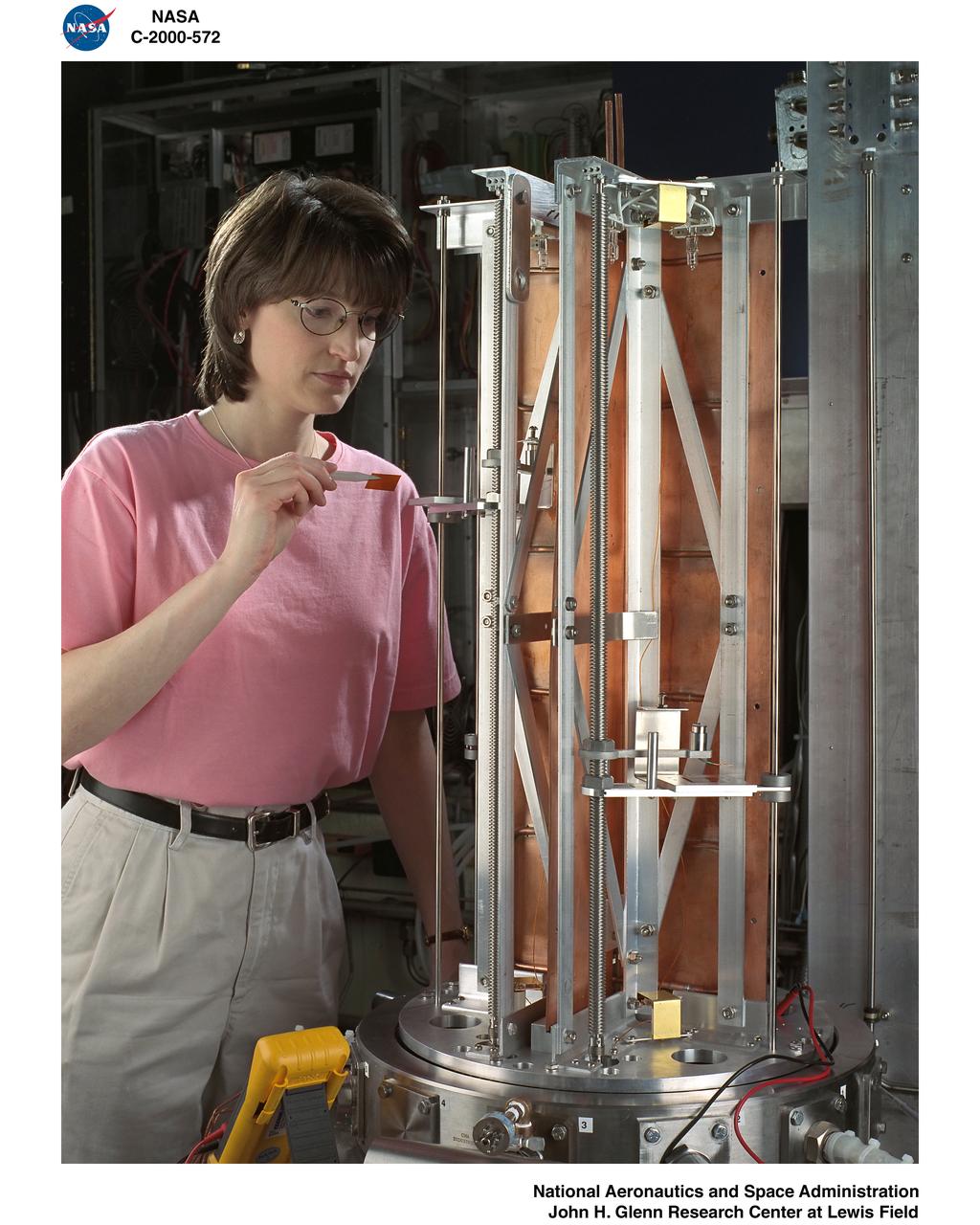
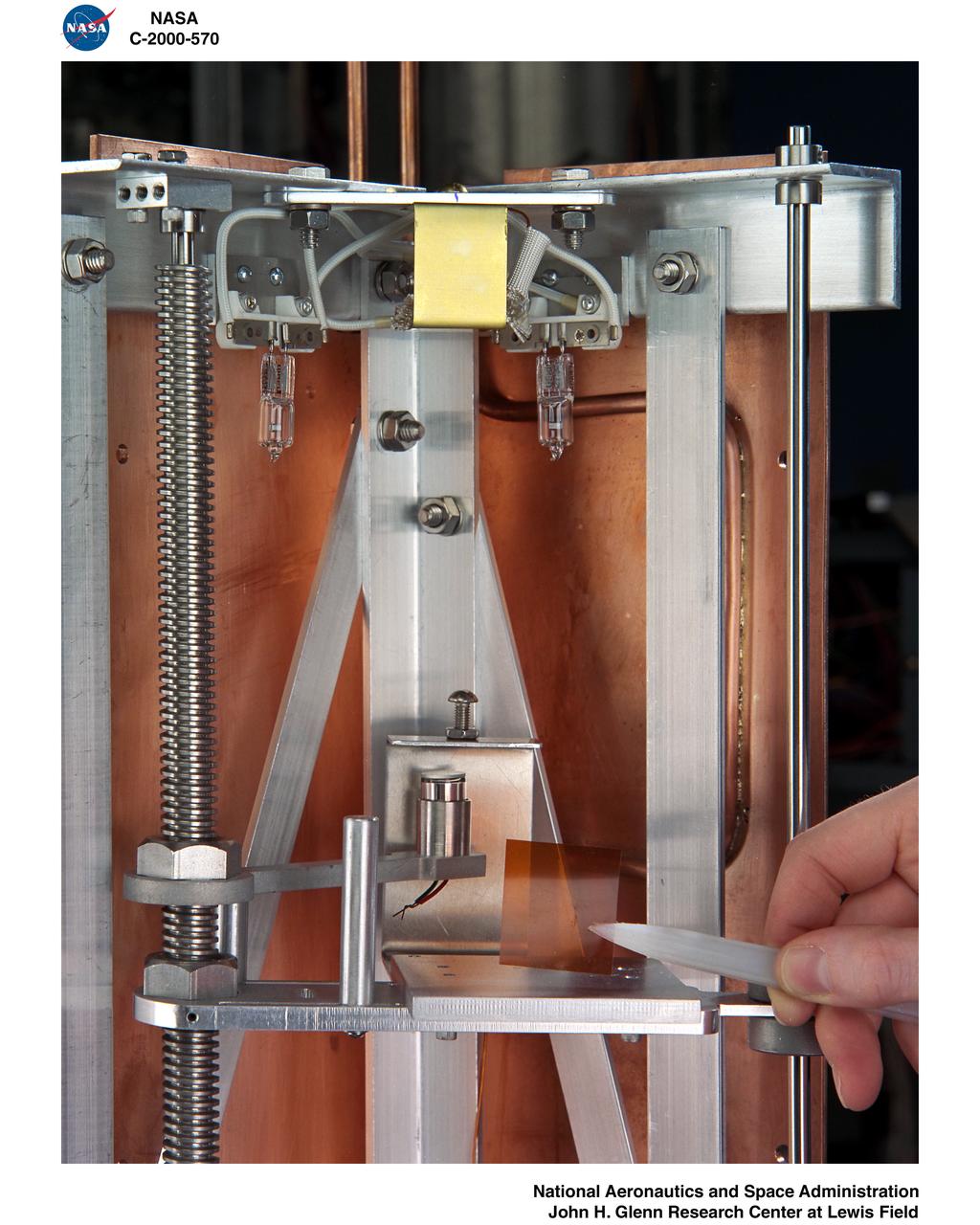
SSVUVA - STEADY STATE VACUUM ULTRAVIOLET AUTOMATED
SSVUVA - STEADY STATE VACUUM ULTRAVIOLET AUTOMATED
ASRF (Automated Science Research Facility) Artwork
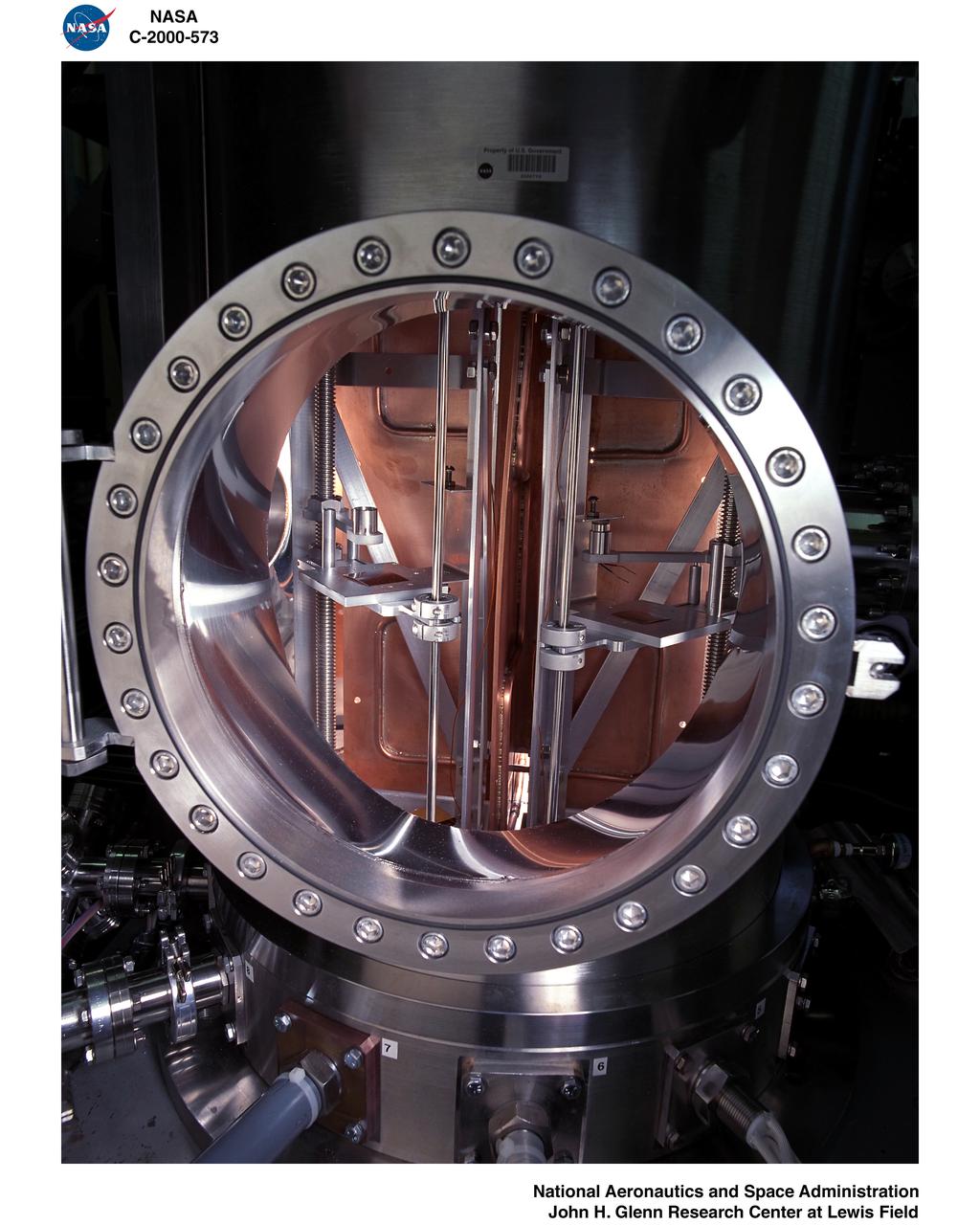
SSVUVA - STEADY STATE VACUUM ULTRAVIOLET AUTOMATED
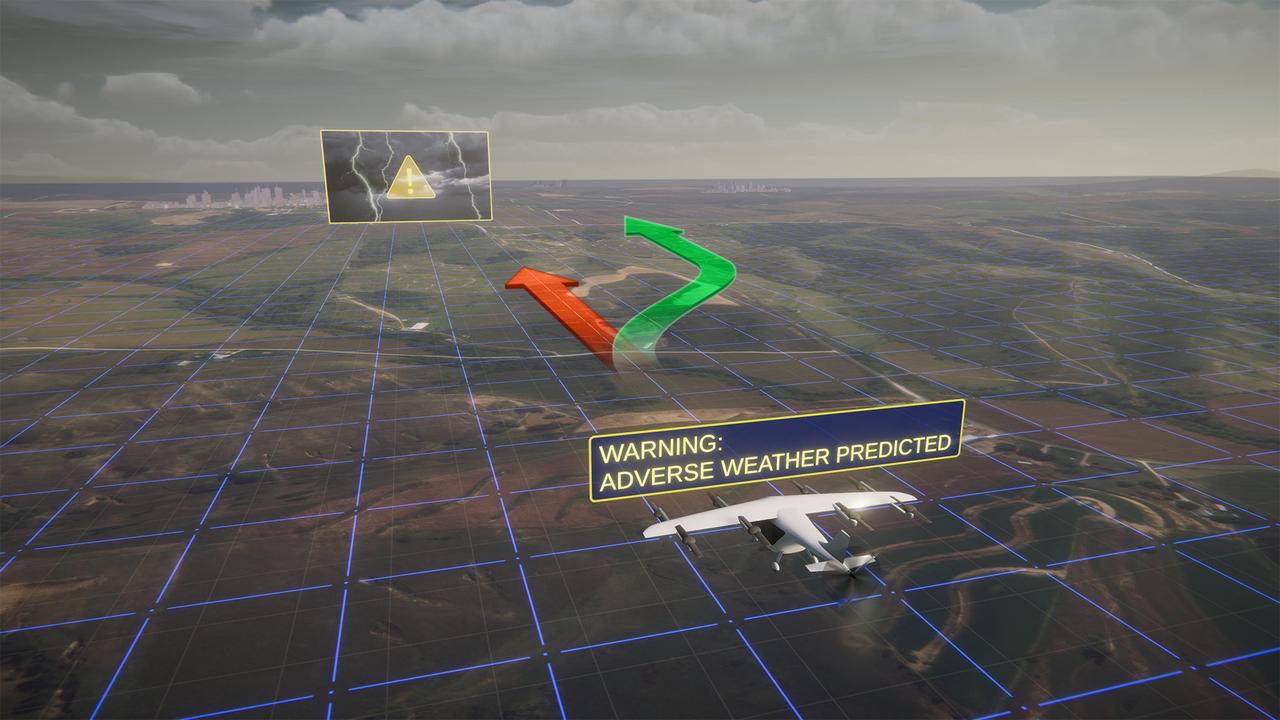
NASA's Advanced Air Mobility mission is helping to ensure this new class of aircraft that industry is developing is safe to operate. This concept art represents how the addition of automated technologies on the aircraft like hazard avoidance could help.
ASRF - Automated Sciences into the future of spaceflight and planetary research. Artwork
Research Automation - ATC (Air Traffic Control) Sever weather flight (Artwork)

This is a photo of a technician at KES Science and Technology Inc., in Kernesaw, Georgia, assembling the AiroCide Ti02, an anthrax-killing device about the size of a small coffee table. The anthrax-killing air scrubber, AiroCide Ti02, is a tabletop-size metal box that bolts to office ceilings or walls. Its fans draw in airborne spores and airflow forces them through a maze of tubes. Inside, hydroxyl radicals (OH-) attack and kill pathogens. Most remaining spores are destroyed by high-energy ultraviolet photons. Building miniature greenhouses for experiments on the International Space Station has led to the invention of this device that annihilates anthrax, a bacteria that can be deadly when inhaled. The research enabling the invention started at the University of Wisconsin's (Madison) Center for Space Automation and Robotics (WCSAR), one of 17 NASA Commercial Space Centers. A special coating technology used in this anthrax-killing invention is also being used inside WCSAR-built plant growth units on the International Space Station. This commercial research is managed by the Space Product Development Program at the Marshall Space Flight Center.

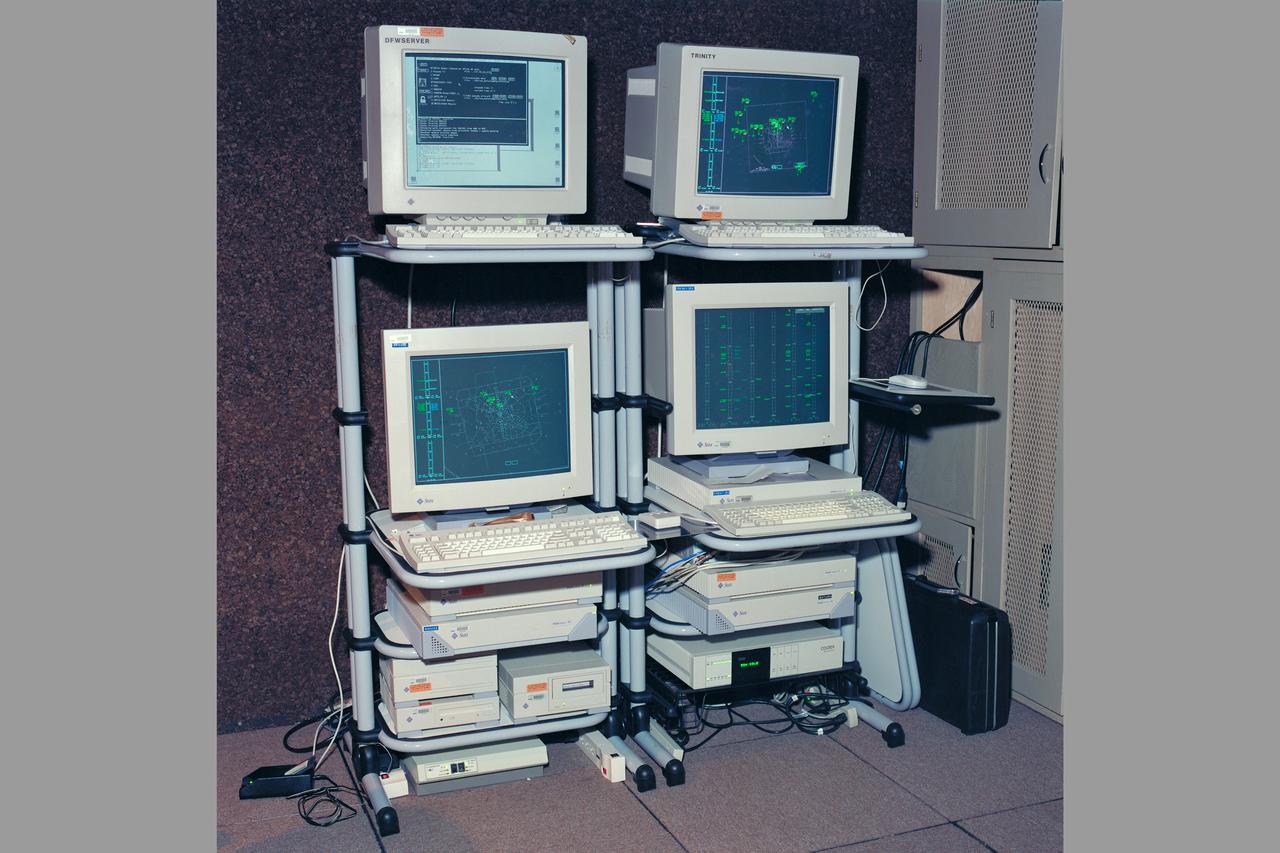
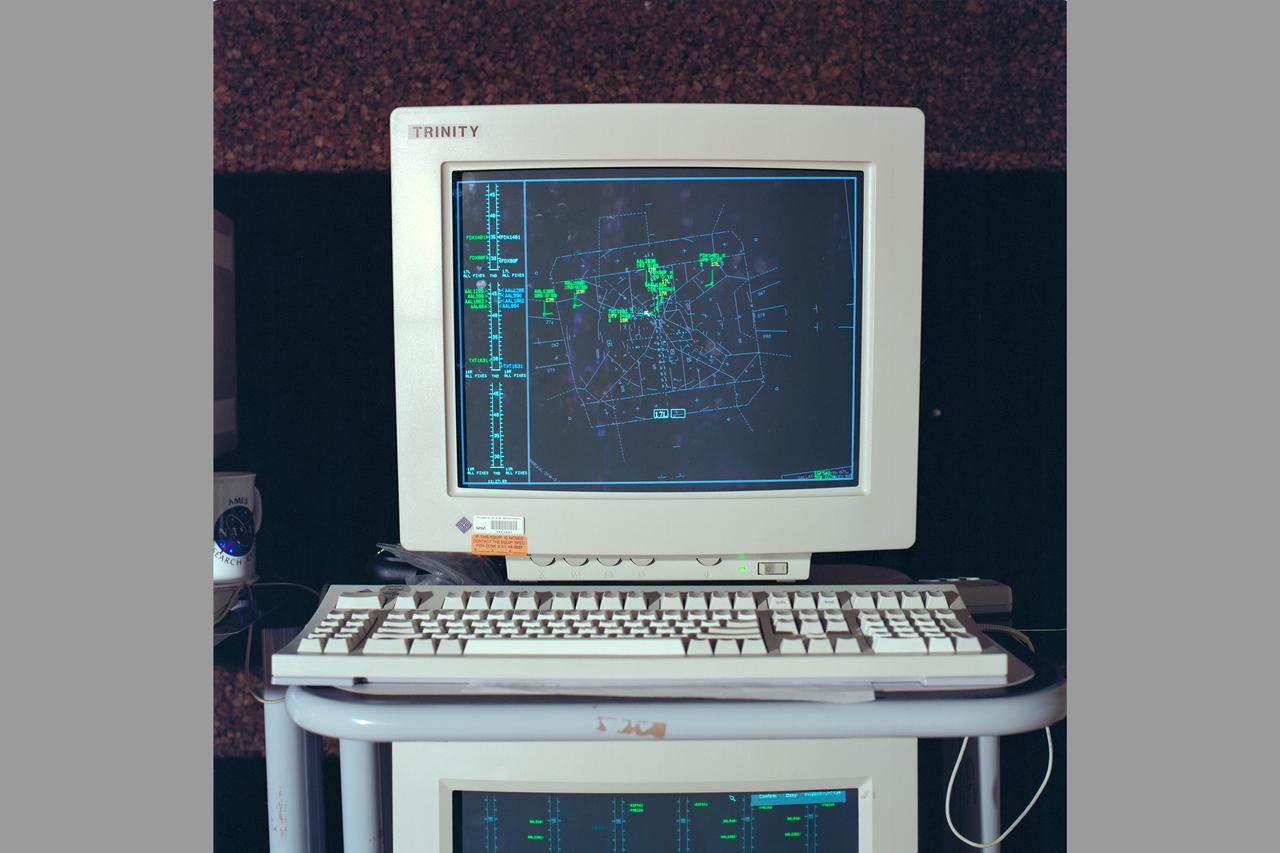
FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)
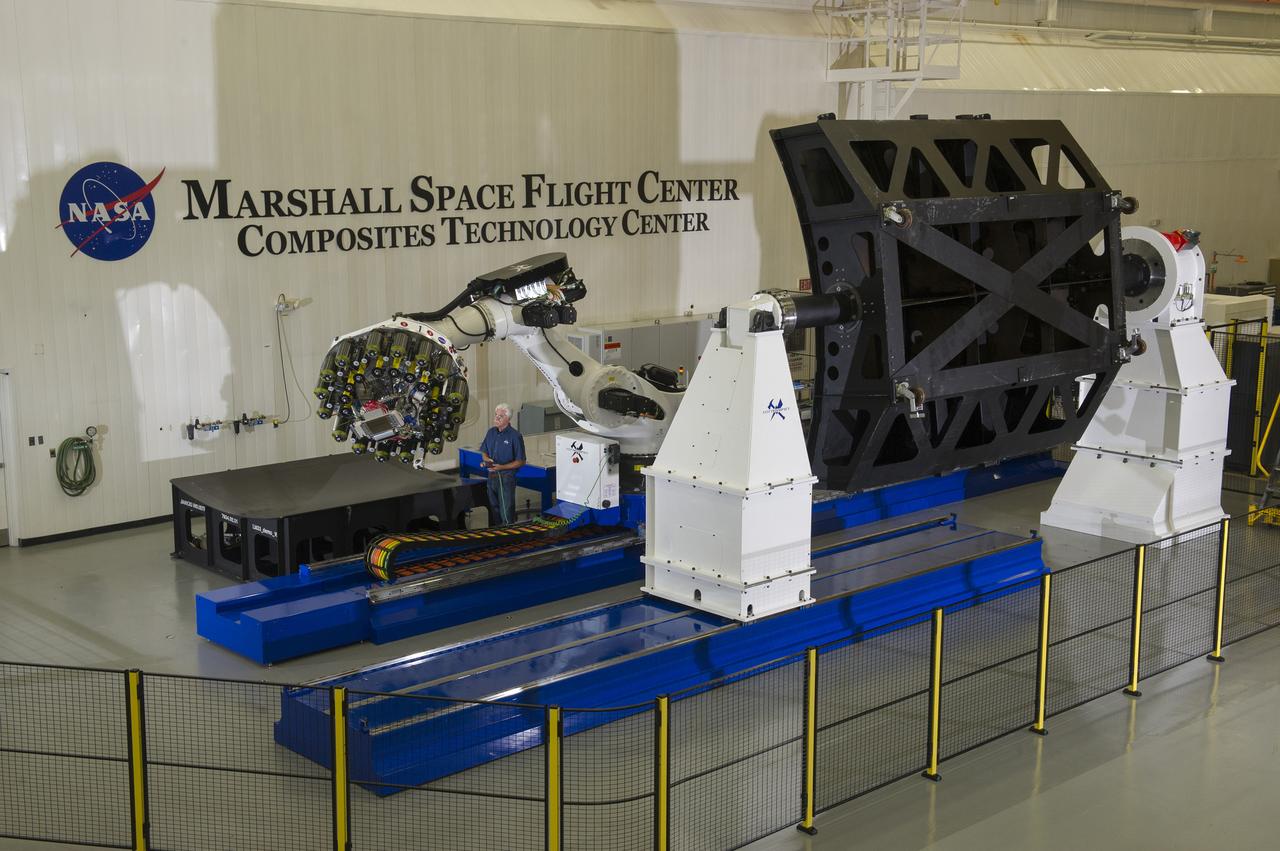
OVERVIEW OF MSFC COMPOSITES TECHNOLOGY CENTER AND THE AUTOMATED FIBER PLACEMENT TOOL WITH MATERIALS ENGINEER LARRY PELHAM

Peter Curerri with KC-135 experiment hardware, a prototype aircraft version of Advanced Automated Directional Solidification Furnace (AADSF).

FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)
FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)
FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)

AUTOMATED DISCOVERY WORKSTATION DEVELOPED UNDER COOPERATIVE AGREEMENT BETWEEN ANALIZA DISCOVERY TECHNOLOGIES AND THE LEWIS INCUBATOR FOR TECHNOLOGY (LIFT)

Test Engineer, Ron Cantrell loads the sample in the (AADSF) Advanced Automated Directional Solidification Furnace.

FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)

FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)

FAST CTAS system operation trials at Dallas/Ft Worth, Tx (DFW TRACON ATC Automation Tool)
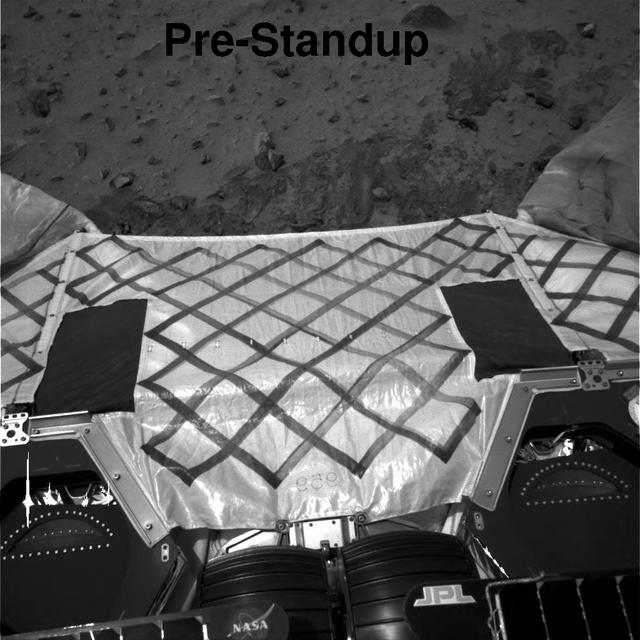
This frame from an animation shows the perspective from the navigation camera on the Mars Exploration Rover Spirit before its automated stand-up process. After standing up, the rover is approximately 12 inches higher off of the lander, resulting in a better view of the surrounding terrain. An animation is available at http://photojournal.jpl.nasa.gov/catalog/PIA05032

Advanced Automated Directional Solidification Furnace (AADSF) G-Cel with Fred Flack and Wayne Gandy in the Microgravity Development Laboratory clean room.
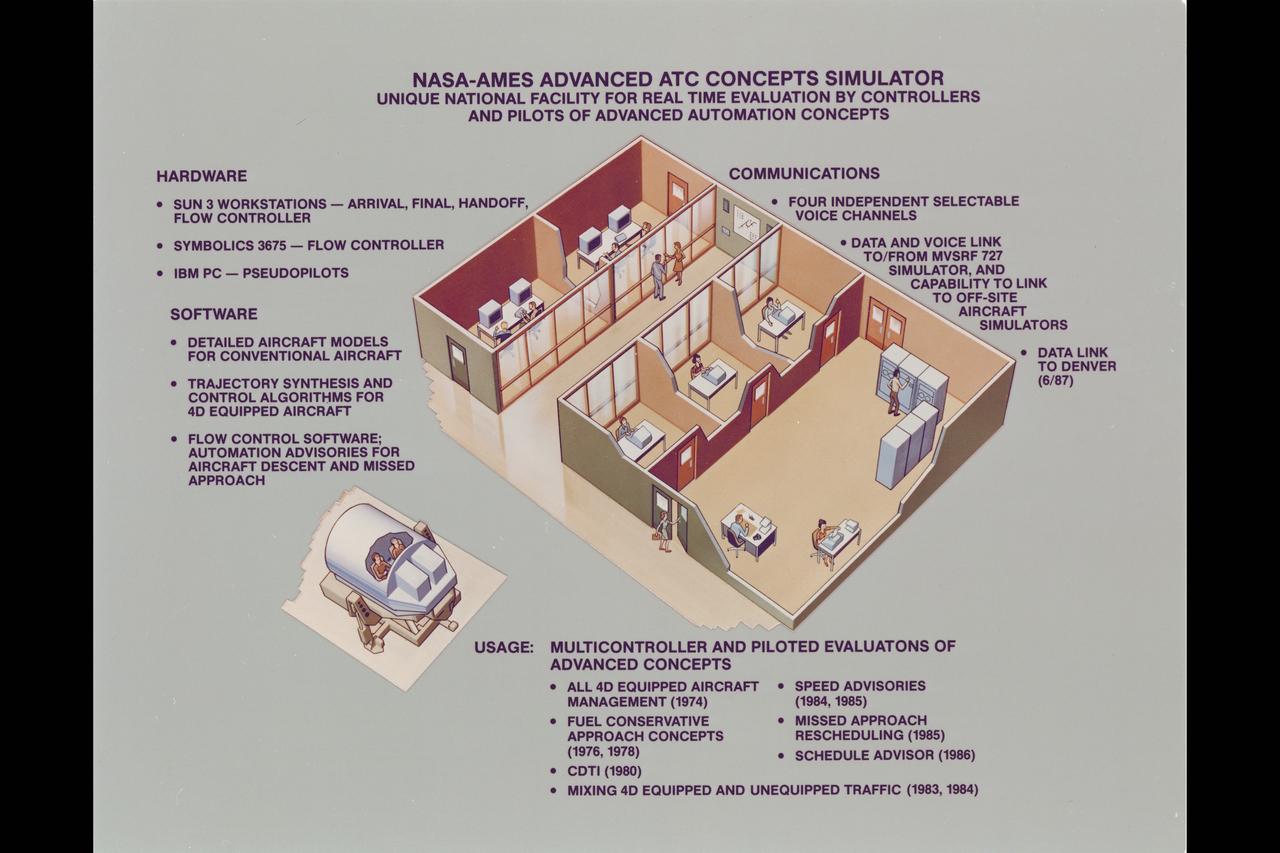
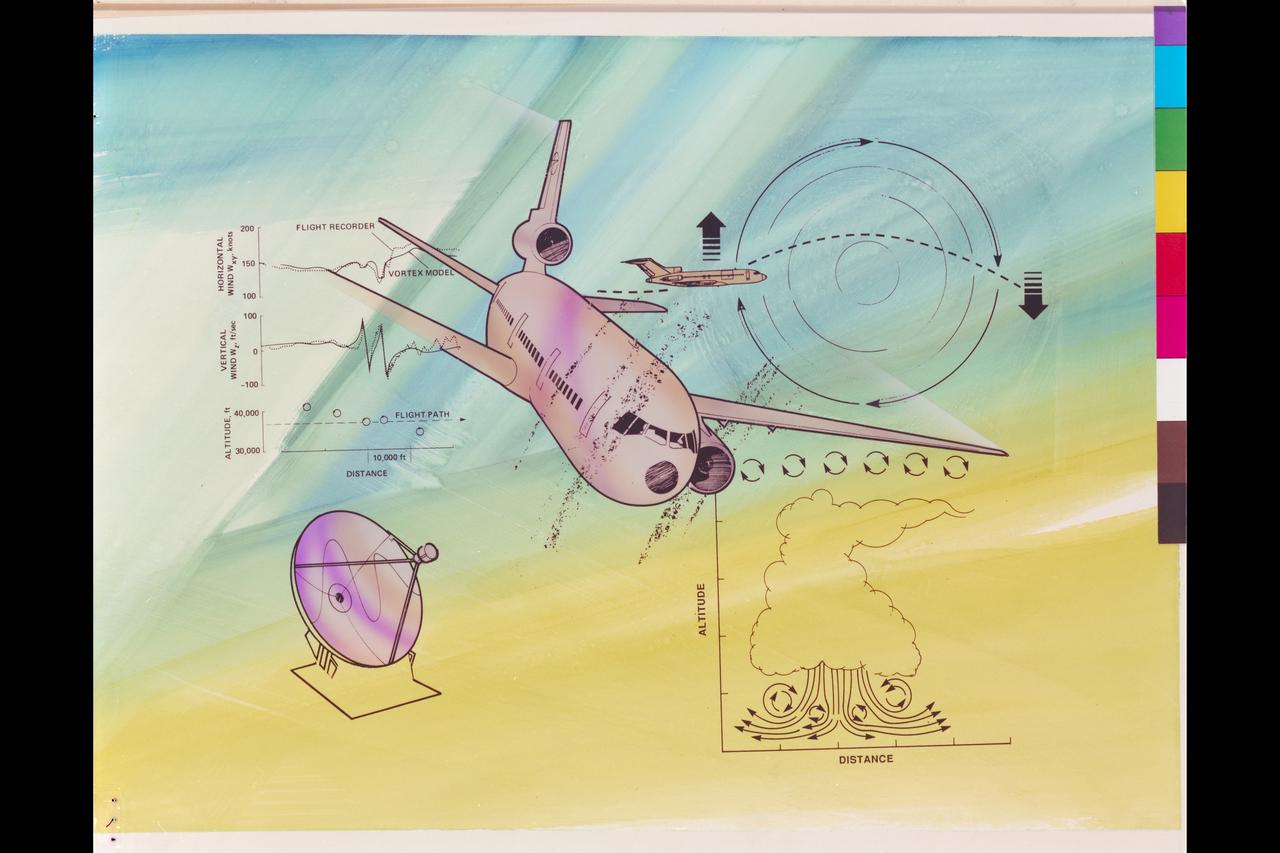
Illustration N-257 Advanced ATC Concepts simulator: unicqu national facility for treal time evalation by controllers and pilots of advanced automation concepts (Cutaway artwork)

View of Plant Habitat which is a fully automated facility that is used to conduct plant bioscience research on the ISS. Photo was taken by Expedition 56 crew.
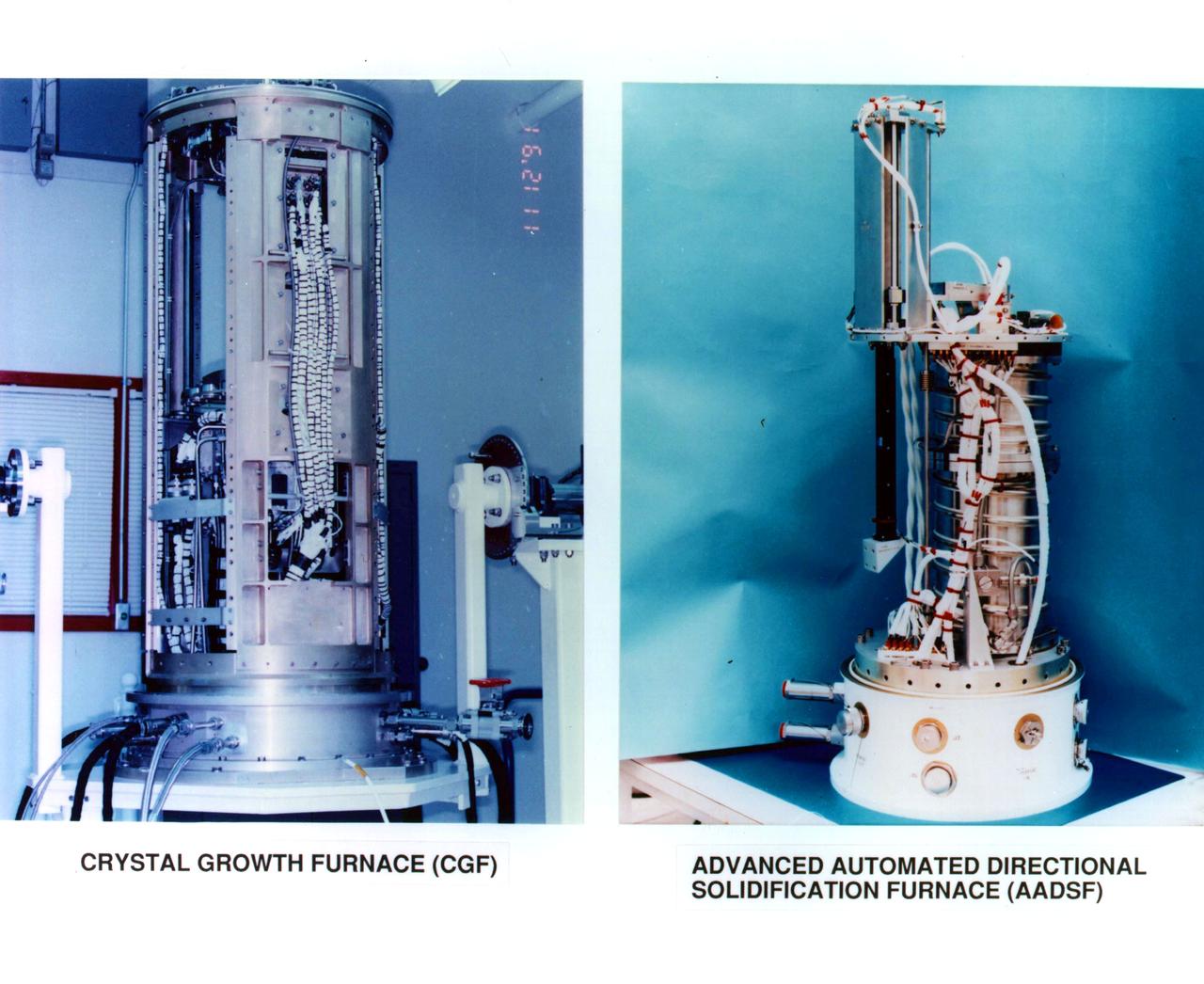
Evolution of Furnaces for Crystal Growth. Left view: Crystal Growth Furnace (CGF) Right view: Advanced Automated Directional Solidification Furnace (AADSF)

iss064e016718 (Dec. 30, 2020) --- The inside of the Advanced Plant Habitat, a fully automated space botany research facility, is pictured aboard the International Space Station.
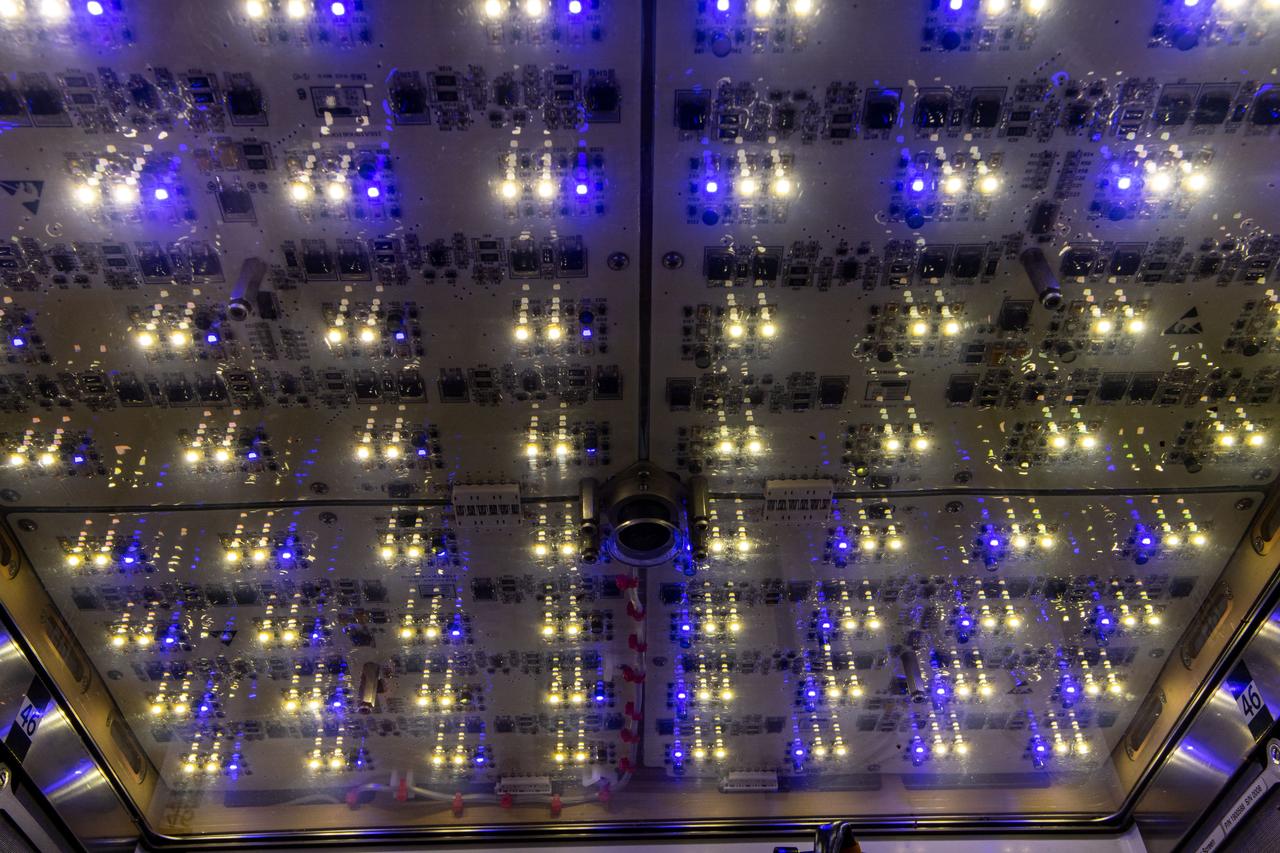
iss064e016721 (Dec. 30, 2020) --- Lights are pictured inside the Advanced Plant Habitat, a fully automated space botany research facility aboard the International Space Station.

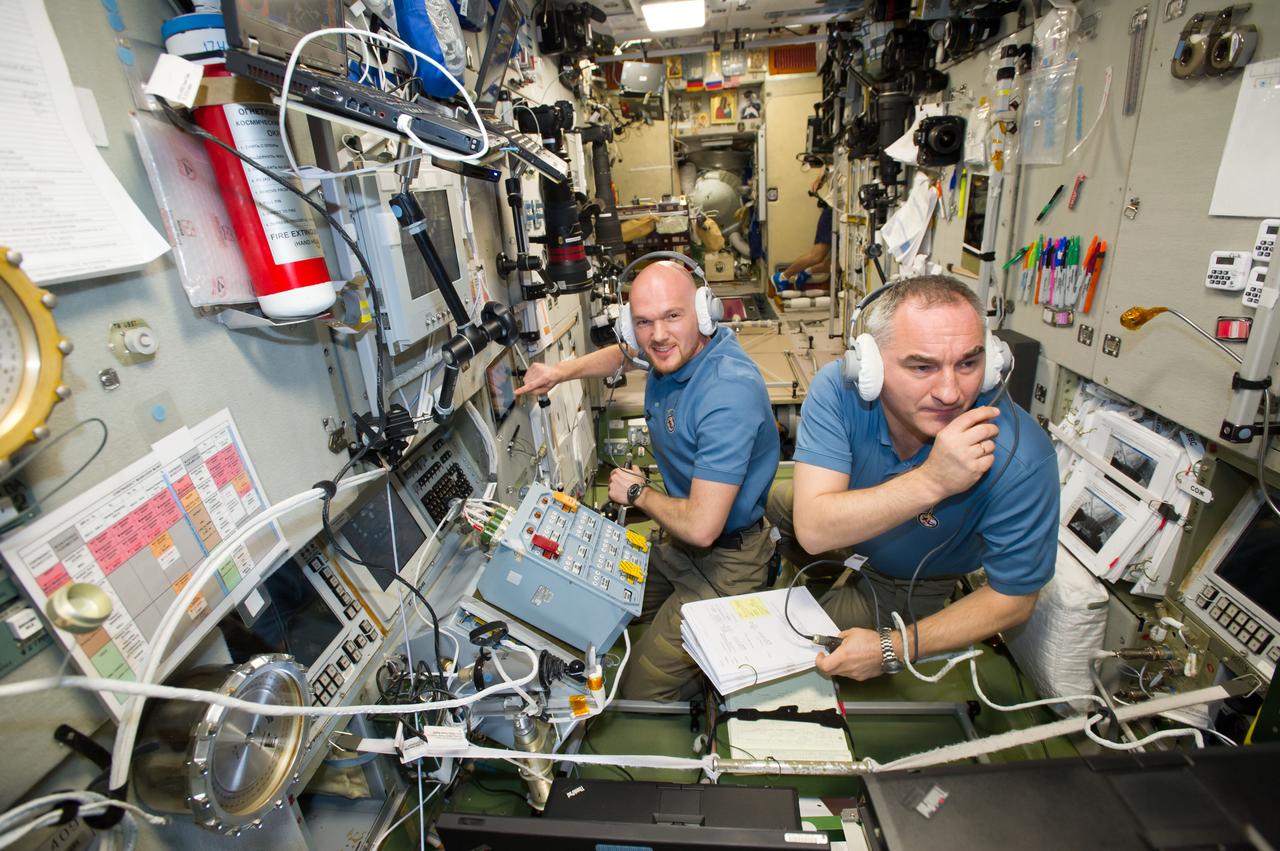
iss071e608454 (Aug. 17, 2024) --- Roscosmos cosmonaut and Expedition 71 Commander Oleg Kononenko is at the controls of the telerobotically operated rendezvous unit, or TORU, monitoring the automated rendezvous and docking of the Progress 89 cargo craft. Located inside the International Space Station's Zvezda service module, the TORU can be used to remotely control the Roscosmos spaceship in the unlikely event it would be unable to complete its automated docking.

iss074e0325940 (Feb. 25, 2026) --- NASA astronaut and Expedition 74 flight engineer Chris Williams works inside the International Space Station's Kibo laboratory module. Williams opened up Kibo's multi-purpose small payload rack to install and configure advanced robotics hardware for the TUSK (Test facility for lab-aUtomation System in Kibo) technology demonstration. TUSK is demonstrating precision mobility and experiment automation in microgravity using a pair of small robotic arms to reduce crew workloads. Credit: NASA/Chris Williams

jsc2024e016244 (11/27/2023) --- The final Multi-Resolution Scanning payload docked with an Astrobee robot at NASA’s Ames Research Center. The Multi-Resolution Scanning payload uses multiple different sensor types to generate high-resolution 3D data and more accurate trajectory data to understand how the robot moves around in 3D space. Such systems could support future Gateway and Lunar surface missions by providing automated defect detection, automated and remote maintenance, autonomous vehicle operations, and surface scanning using rovers.
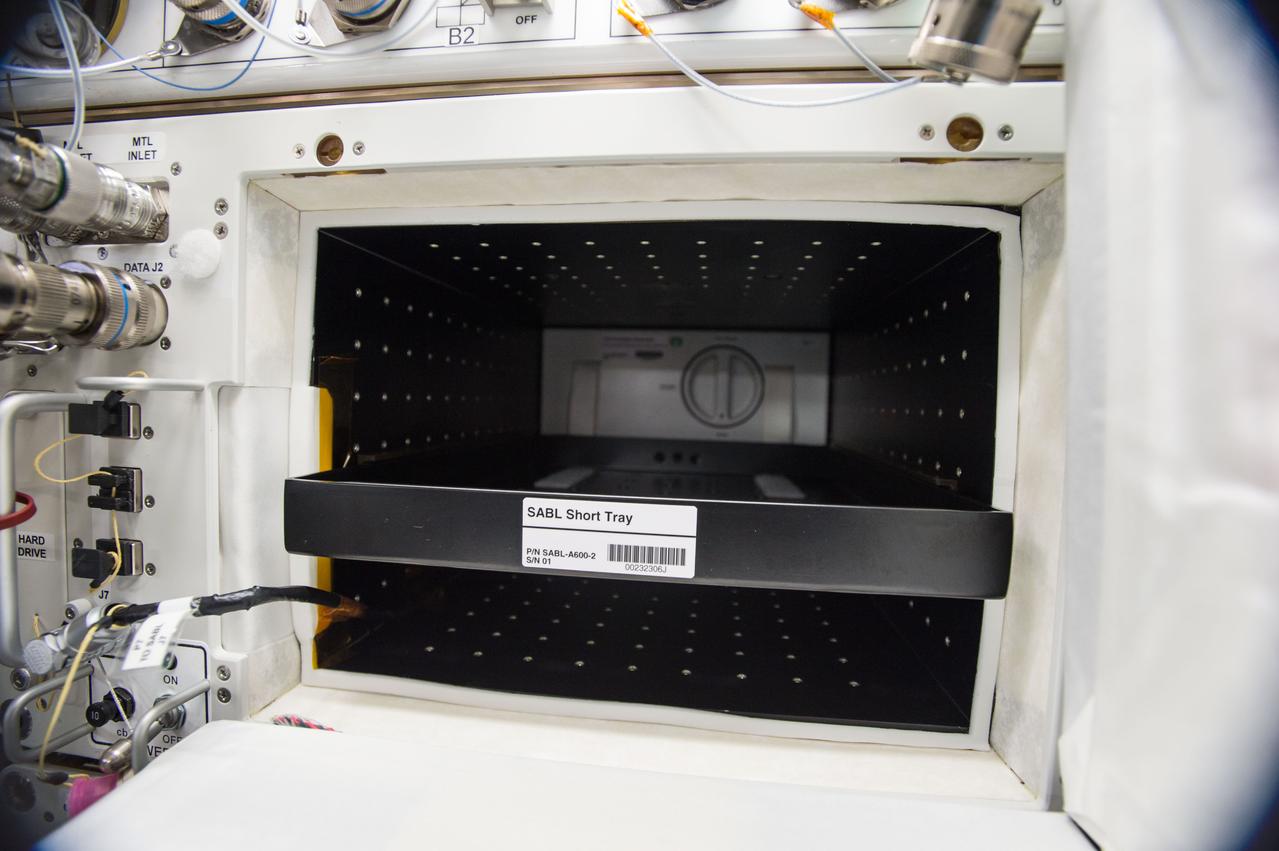
iss048e042380(7/21/2016) --- A view of the Space Automated Bioproduct Laboratory (SABL) Short Tray inside the SABL 2 following installation of the Carbon Dioxide (CO2) Incubator Controller. Image was taken during Heart Cells experiment setup in the Destiny U.S. Laboratory. The Space Automated Bioproduct Laboratory (SABL) supports a wide variety of experiments in the life, physical and material sciences with a focus on supporting research of biological systems and processes.

ISS041-E-013693 (13 Sept. 2014) --- Photographed with a mounted automated camera, this is one of a number of images featuring the European Space Agency?s Automated Transfer Vehicle (ATV-5 or Georges Lemaitre) docked with the International Space Station. Except for color changes, the images are almost identical. The variation in color from frame to frame is due to the camera?s response to the motion of the orbital outpost, relative to the illumination from the sun.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft (No. 843) flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

ISS040-E-089802 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.

A view of the TAGSAM (Touch and Go Sample Acquisition Mechanism) from above, showing the Mylar flap with a pile of asteroid material resting on it. This image was created using manual high-resolution precision photography and semi-automated focus stacking procedure. Created using manual high-resolution precision photography and semi-automated focus stacking procedure. Credit: NASA/Erika Blumenfeld & Joseph Aebersold

ISS014-E-06544 (26 Oct. 2006) --- Backdropped by a blue and white Earth, an unpiloted Progress supply vehicle approaches the International Space Station. Progress docked to the aft port of the Zvezda Service Module at 9:29 a.m. (CDT) on Oct. 26. The spacecraft used the automated Kurs system to dock at the aft port of the Zvezda service module. Expedition 14 flight engineer Mikhail Tyurin stood by at the manual Toru docking system controls, but the automated system functioned as designed and manual intervention was not needed.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft (No. 843) flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

iss074e0326337 (Feb. 25, 2026) --- NASA astronaut and Expedition 74 flight engineer Chris Williams works inside the International Space Station's Kibo laboratory module. Williams opened up Kibo's multi-purpose small payload rack to install and configure advanced robotics hardware for the TUSK (Test facility for lab-aUtomation System in Kibo) technology demonstration. TUSK is demonstrating precision mobility and experiment automation in microgravity using a pair of small robotic arms to reduce crew workloads. Credit: NASA/Chris Williams

iss071e608479 (Aug. 17, 2024) --- Roscosmos cosmonauts Nikolai Chub (foreground) and Oleg Kononenko, Expedition 71 Flight Engineer and Commander respectively, are at the controls of the telerobotically operated rendezvous unit, or TORU, monitoring the automated rendezvous and docking of the Progress 89 cargo craft. Located inside the International Space Station's Zvezda service module, the TORU can be used to remotely control the Roscosmos spaceship in the unlikely event it would be unable to complete its automated docking.

ISS041-E-013687 (13 Sept. 2014) --- Photographed with a mounted automated camera, this is one of a number of images featuring the European Space Agency?s Automated Transfer Vehicle (ATV-5 or Georges Lemaitre) docked with the International Space Station. Except for color changes, the images are almost identical. The variation in color from frame to frame is due to the camera?s response to the motion of the orbital outpost, relative to the illumination from the sun.

ISS040-E-089793 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.
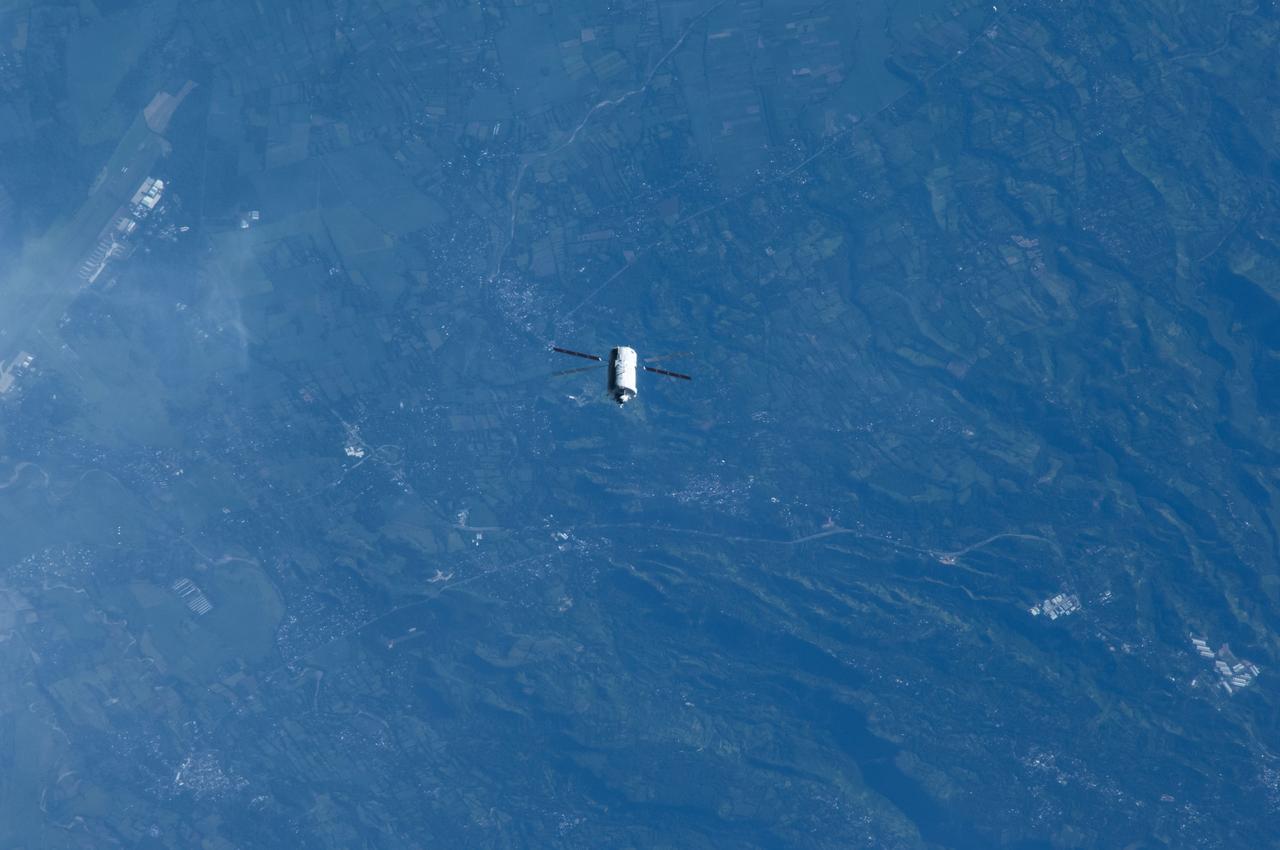
ISS040-E-089782 (8 Aug. 2014) --- The “Georges Lemaitre” Automated Transfer Vehicle (ATV-5), photographed by an Expedition 40 crew member, flies directly under the International Space Station at a distance of about 3.7 miles to test sensors and radar systems designed for future European spacecraft. After its “fly-under” of the station, the ATV will move in front of, above, and behind the outpost for the final days of its two-week rendezvous that will lead to an automated docking to the aft port of the Zvezda Service Module on Aug. 12.

ISS041-E-013683 (13 Sept. 2014) --- Photographed with a mounted automated camera, this is one of a number of images featuring the European Space Agency?s Automated Transfer Vehicle (ATV-5 or Georges Lemaitre) docked with the International Space Station. Except for color changes, the images are almost identical. The variation in color from frame to frame is due to the camera?s response to the motion of the orbital outpost, relative to the illumination from the sun.

NASA Dryden's Automated Aerial Refueling (AAR) project evaluated the capability of an F/A-18A aircraft as an in-flight refueling tanker with the objective of developing analytical models for an automated aerial refueling system for unmanned air vehicles. The F/A-18 "tanker" aircraft (No. 847) underwent flight test envelope expansion with an aerodynamic pod containing air-refueling equipment carried beneath the fuselage. The second aircraft (No. 843) flew as the receiver aircraft during the study to assess the free-stream hose and drogue dynamics on the F/A-18A.

Out the window view of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

AFCM subproject simulation FAA-2 flight test team members Thomas Lombaerts, left, and Kimberlee Shish, right, in the VMS control room, N243, during a simulation.

AFCM subproject simulation FAA-2 flight test team members Allen Ruan, left, Thomas Lombaerts, Kimberlee Shish, Edgar Torres, and Stephen Norris, right, in the VMS control room, N243 during a simulation.
Human factors engineer Casey Smith, right, and pilot Wayne Ringelberg, left, discuss simulation results during a flight debrief in the VMS control room, N243.

Group photo of AFCM subproject simulation FAA-2 flight test team members Thomas Lombaerts, left, Mike Feary, Dave Sizoo, Kimberlee Shish, Loran Haworth, Mitch Soth, and Dave Webber, right, in the VMS control room, N243.

Pilot David Zahn fine-tunes the traffic display screen of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

AFCM subproject simulation FAA-2 flight test team member Thomas Lombaerts in the VMS control room, N243, during a simulation.

Traffic display screen of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

Traffic display screen of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

Human factors engineer Casey Smith, left, and pilot Wayne Ringelberg, right, discuss simulation results during a flight debrief in the VMS control room, N243.

Pilot David Zahn fine-tunes the traffic display screen of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

David Zahn pilots the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

Michael Feary pilots a simulated electric vertical takeoff and landing, or eVTOL, aircraft in the VMS’s R-Cab during the AFCM subproject simulation FAA-2 flight tests in the VMS, N243.

AFCM subproject simulation FAA-2 flight test team member Thomas Lombaerts in the VMS control room, N243, during a simulation.

Out the window view of the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.

AFCM subproject simulation FAA-2 flight test team members Thomas Lombaerts, left, and Kimberlee Shish, right, in the VMS control room, N243, during a simulation.

AFCM subproject simulation FAA-2 flight test team members Allen Ruan, left, Thomas Lombaerts, Kimberlee Shish, Edgar Torres, and Stephen Norris, right, in the VMS control room, N243 during a simulation.

AVA-1h simulation team members Megan Mitchell, left, Christian Schmitz, and Matthew Blanken, right, in the VMS control room, N243, prepare for a simulation.

David Zahn pilots the ownship aircraft in the VMS’s R-Cab during the AVA-1h simulation in the VMS, N243.
Human factors engineer Casey Smith, right, and pilot Wayne Ringelberg, left, discuss simulation results during a flight debrief in the VMS control room, N243.

AFCM subproject simulation FAA-2 flight test team members Allen Ruan, left, Thomas Lombaerts, and Kimberlee Shish, right, in the VMS control room, N243, during a simulation.