
Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18 jets used in the Autonomous Formation Flight (AFF) program

These two NASA F/A-18 aircraft are flying a test point for the Autonomous Formation Flight project over California's Mojave Desert.

Two NASA Dryden F/A-18's land on the Edwards Air Force Base runway after completion of an Autonomous Formation Flight (AFF) mission.

Flying an Autonomous Formation Flight mission, two F/A-18s from the NASA Dryden Flight Research Center, Edwards, California, gain altitude near Rogers Dry Lake.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

This unique view, looking directly up at two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program, was captured by Carla Thomas from another F-18 flying safety/chase.

Two F/A-18B aircraft involved in the AFF program return to base in close formation with the autonomous function disengaged.
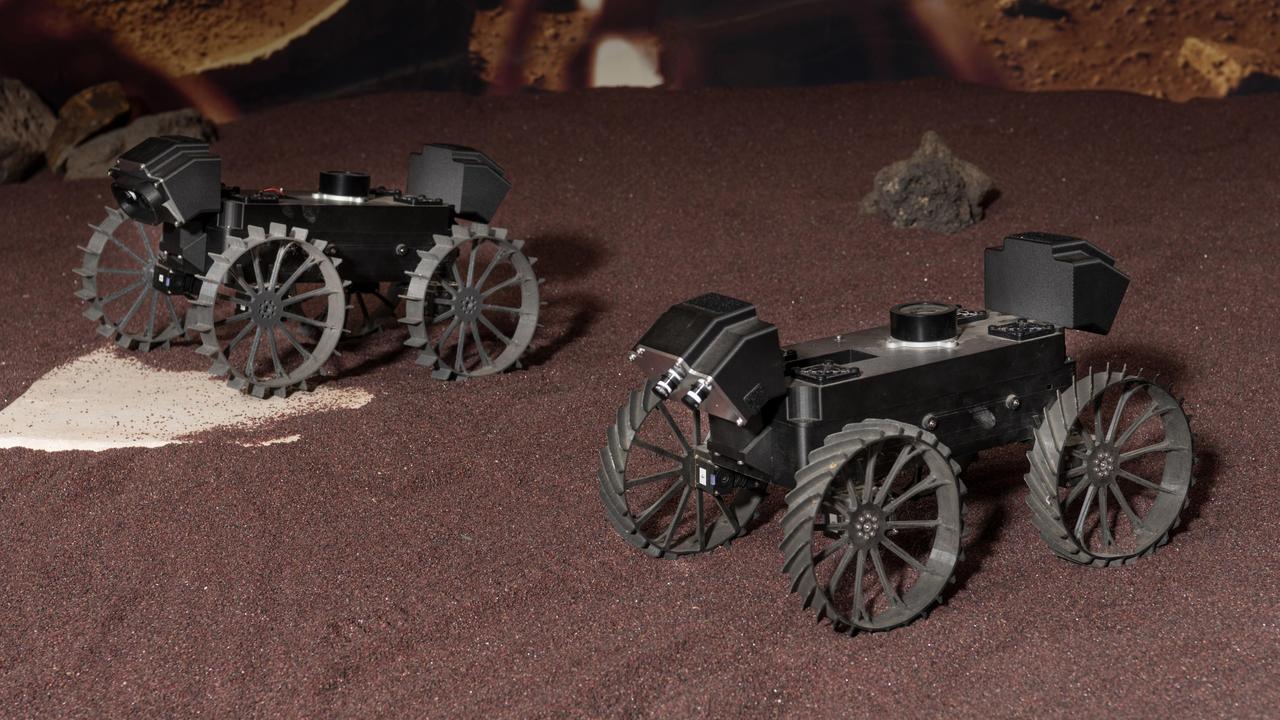
Prototypes of the rovers being built for NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration were tested at the agency's Jet Propulsion Laboratory in Southern California in August 2022. CADRE is a technology demonstration designed to show that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The CADRE team dubbed the seven plastic test prototypes the "Mercury 7" and named each after one of NASA's seven Project Mercury astronauts. John (for John Glenn) and Scott (for Scott Carpenter) are shown here in a sandbox during a test of the rovers' capability for driving in formation. The formation-driving algorithm will be used to help CADRE rovers map the lunar surface and subsurface with cameras and sensors. The prototypes are smaller than the three CADRE rovers slated to arrive at the Moon aboard a lander in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative. Those flight models will be about the size of a carry-on suitcase. https://photojournal.jpl.nasa.gov/catalog/PIA25666
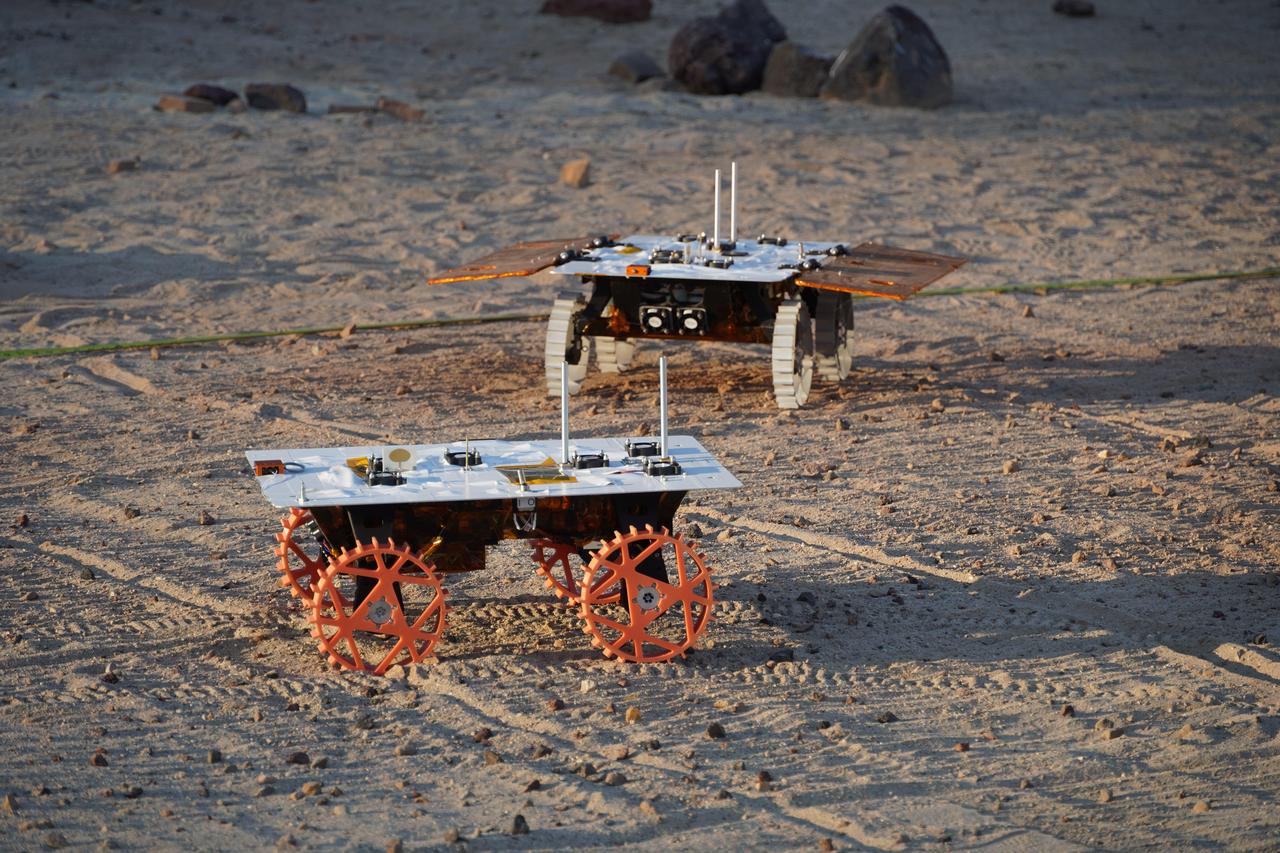
Two full-scale development model rovers that are part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drive in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in August 2023. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. The rovers being tested here are similar in size and appearance to the flight models – still being built at the time of this image – that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used for drive tests outside the clean room. In this image, one rover is fitted with a stand-in for solar panels, while the other rover is not. A series of Mars Yard tests with the development models confirmed CADRE hardware and software can work together to accomplish key goals for the project. The rovers drove together in formation. Faced with unexpected obstacles in the way, they adjusted their plans as a group by sharing updated maps and replanning coordinated paths. And when one rover was low on battery charge, the whole team paused so they could later continue together. Several drives were performed at night under large flood lamps so the rovers could experience extreme shadows and lighting that approximate what they'll encounter during the lunar daytime. https://photojournal.jpl.nasa.gov/catalog/PIA26168