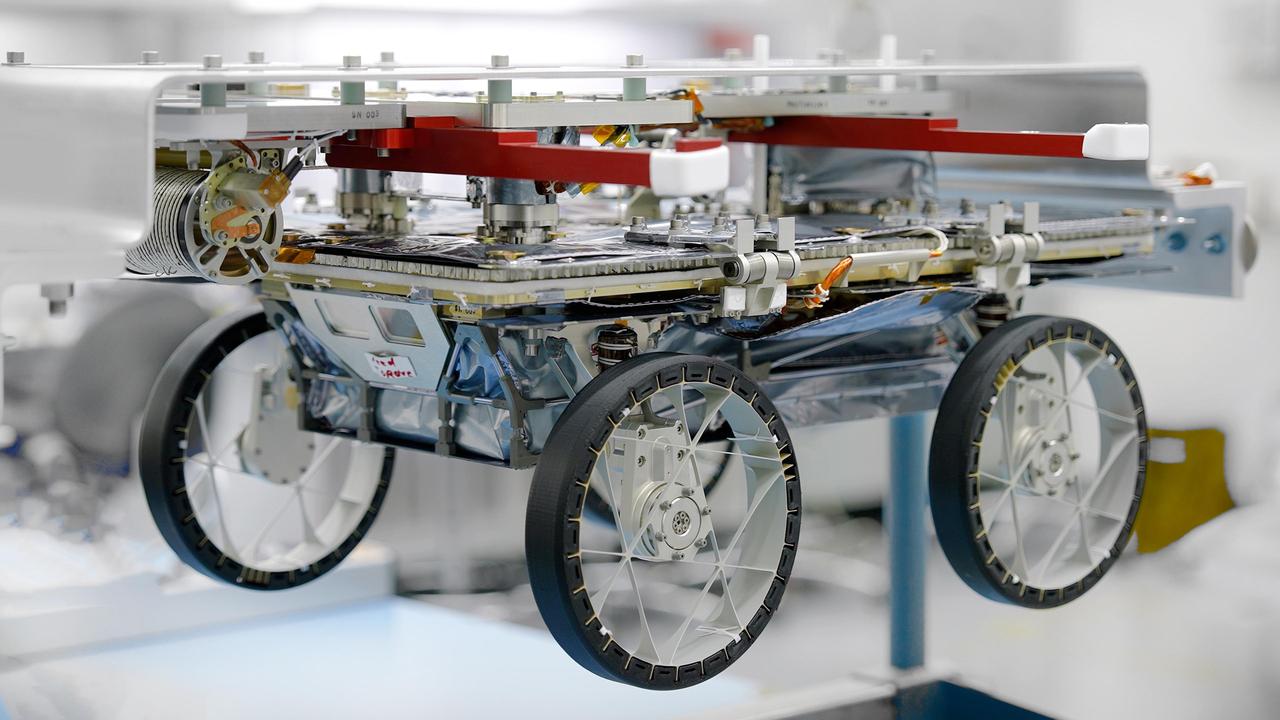
One of three small lunar rovers that are part of a NASA technology demonstration called CADRE (Cooperative Autonomous Distributed Robotic Exploration) is attached to a fixture in a clean room at the agency's Jet Propulsion Laboratory in Southern California on Jan. 29, 2025. Less than two weeks later, the rover had been packed up and shipped off in preparation for launch. CADRE aims to prove that a group of robots can collaborate to gather data without receiving direct commands from mission controllers on Earth. Its trio of rovers will use their cameras and ground-penetrating radars to send back imagery of the lunar surface and subsurface while testing out the novel software systems that enable them to work together as a team autonomously. Before embarking on the first leg of a multistage journey to the Moon, each rover was mated to its deployer system, which will lower it via tether from an Intuitive Machines lander onto the dusty lunar surface. Engineers flipped each rover-deployer pair over and attached it to an aluminum plate for safe transit. The rovers were then sealed into protective metal-frame enclosures that were fitted snuggly into metal shipping containers and loaded onto a truck for the drive to Intuitive Machines' Houston facility. A division of Caltech in Pasadena, California, JPL manages CADRE for the Game Changing Development program within NASA's Space Technology Mission Directorate in Washington. The technology demonstration was selected under the agency's Lunar Surface Innovation Initiative, which was established to expedite the development of technologies for sustained presence on the lunar surface. CADRE will launch as a payload on the third lunar lander mission by Intuitive Machines, called IM-3, under NASA's CLPS (Commercial Lunar Payload Services) initiative, which is managed by the agency's Science Mission Directorate, also in Washington. The agency's Glenn Research Center in Cleveland and its Ames Research Center in Silicon Valley, California, both supported the project. Motiv Space Systems designed and built key hardware elements at the company's Pasadena facility. Clemson University in South Carolina contributed research in support of the project. For more about CADRE, go to: https://go.nasa.gov/cadre https://photojournal.jpl.nasa.gov/catalog/PIA26428

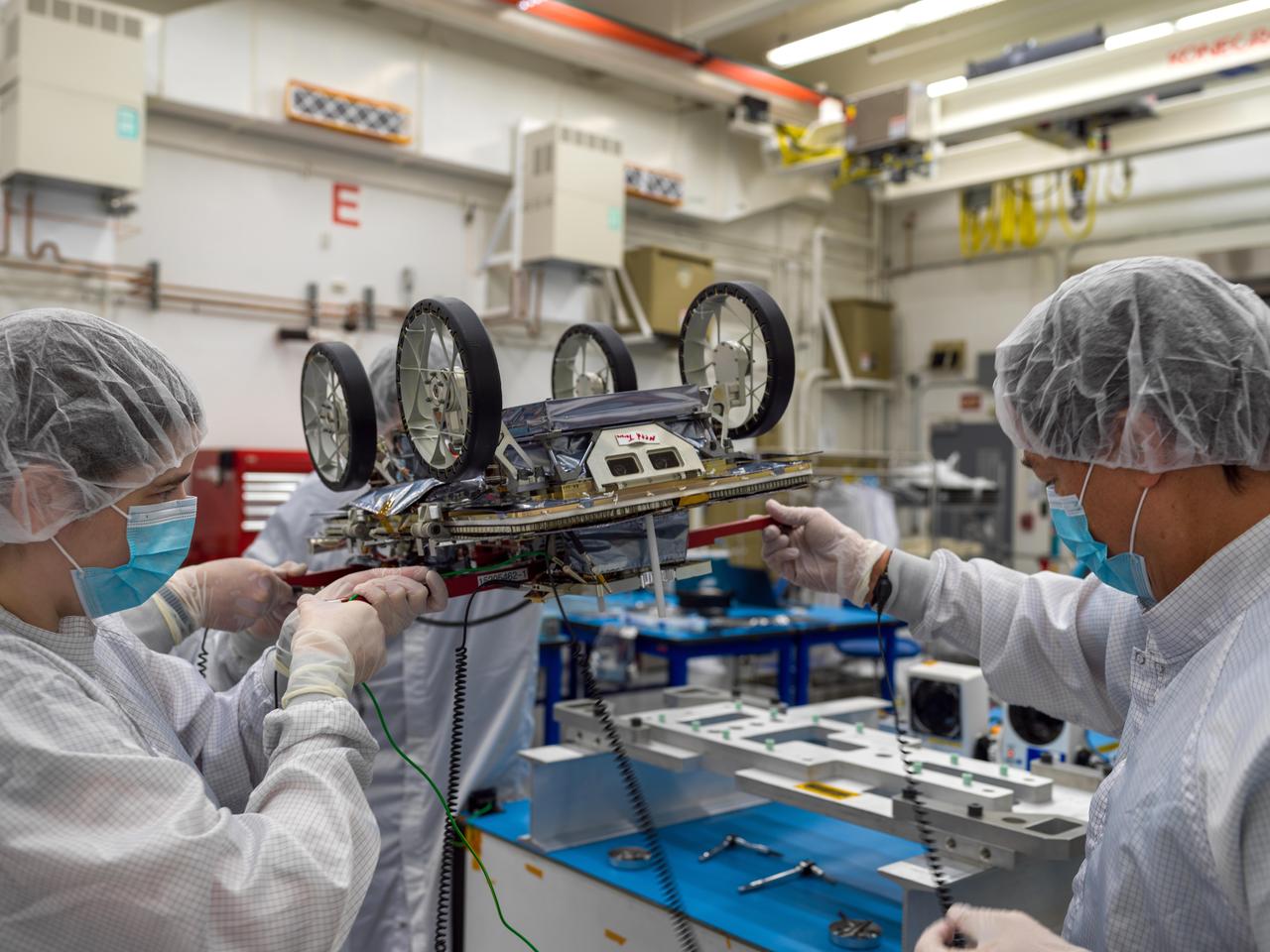
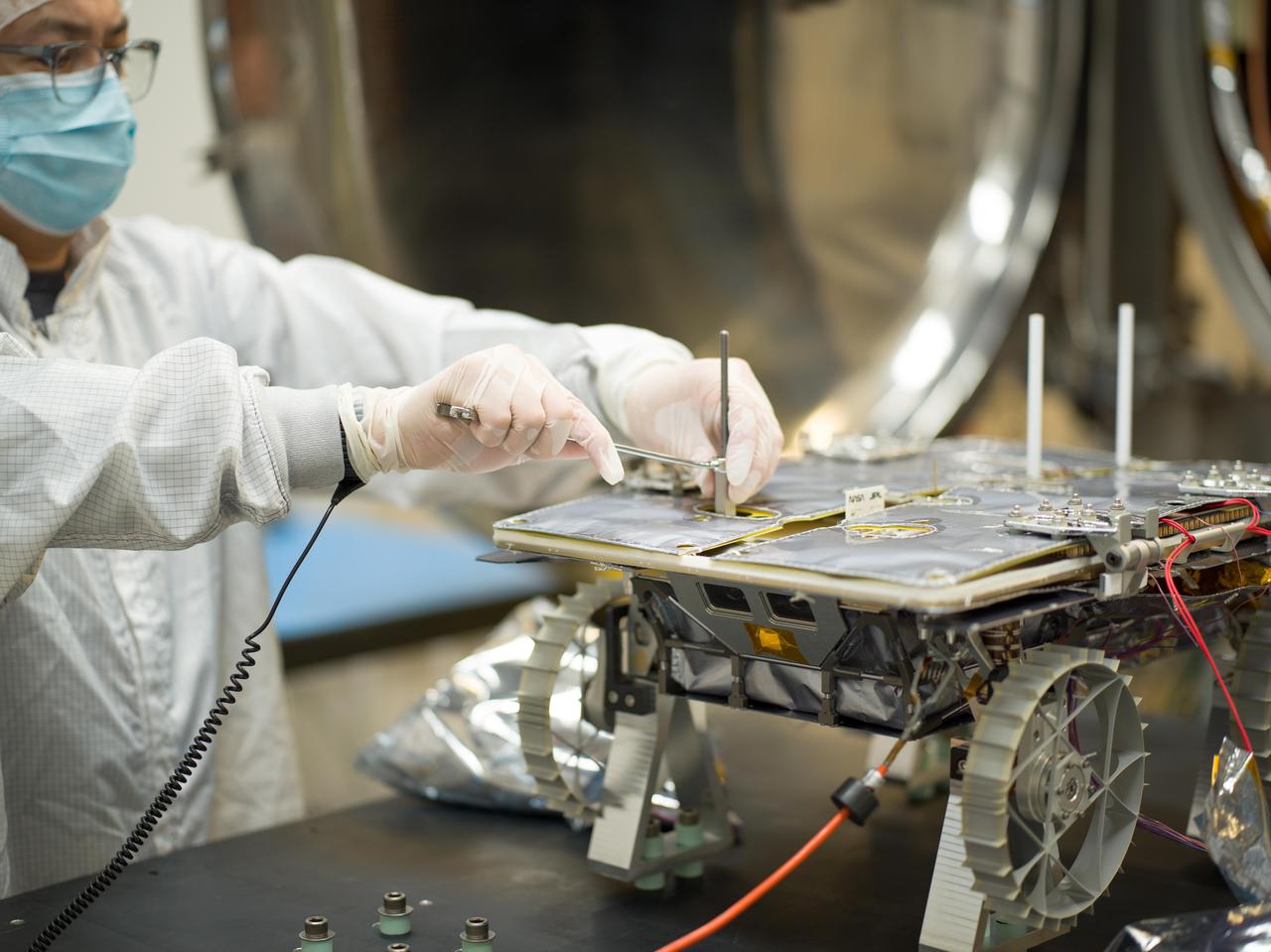
Engineers and technicians prepare one of three small lunar rovers that are part of a NASA technology demonstration called CADRE (Cooperative Autonomous Distributed Robotic Exploration). Mechanical engineer Kristopher Sherrill, left, and technician Leroy Montalvo lower an enclosure over the upside-down rover in a clean room at the agency's Jet Propulsion Laboratory in Southern California on Jan. 29, 2025. CADRE aims to prove that a group of robots can collaborate to gather data without receiving direct commands from mission controllers on Earth. Its trio of rovers will use their cameras and ground-penetrating radars to send back imagery of the lunar surface and subsurface while testing out the novel software systems that enable them to work together as a team autonomously. Before embarking on the first leg of a multistage journey to the Moon, each rover was mated to its deployer system, which will lower it via tether from an Intuitive Machines lander onto the dusty lunar surface. Engineers flipped each rover-deployer pair over and attached it to an aluminum plate for safe transit. The rovers were then sealed into protective metal-frame enclosures that were fitted snuggly into metal shipping containers and loaded onto a truck for the drive to Intuitive Machines' Houston facility. A division of Caltech in Pasadena, California, JPL manages CADRE for the Game Changing Development program within NASA's Space Technology Mission Directorate in Washington. The technology demonstration was selected under the agency's Lunar Surface Innovation Initiative, which was established to expedite the development of technologies for sustained presence on the lunar surface. CADRE will launch as a payload on the third lunar lander mission by Intuitive Machines, called IM-3, under NASA's CLPS (Commercial Lunar Payload Services) initiative, which is managed by the agency's Science Mission Directorate, also in Washington. The agency's Glenn Research Center in Cleveland and its Ames Research Center in Silicon Valley, California, both supported the project. Motiv Space Systems designed and built key hardware elements at the company's Pasadena facility. Clemson University in South Carolina contributed research in support of the project. For more about CADRE, go to: https://go.nasa.gov/cadre https://photojournal.jpl.nasa.gov/catalog/PIA26426
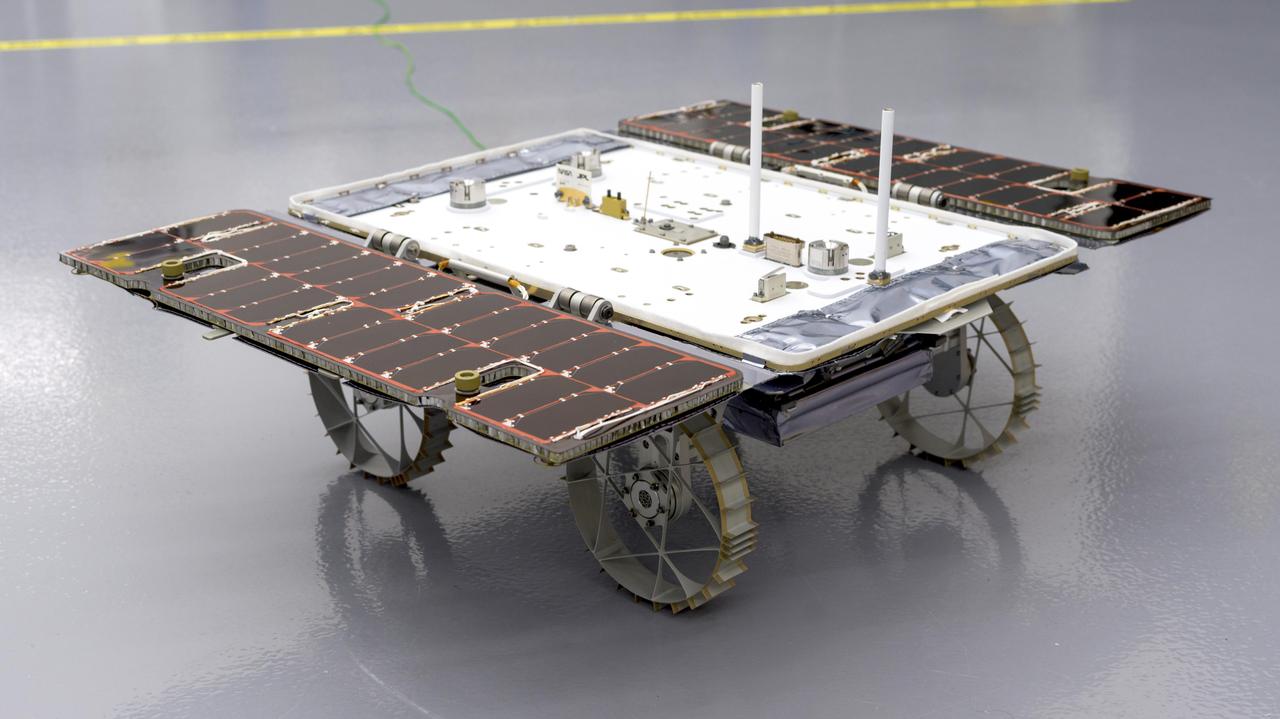
One of three small lunar rovers that are part of a NASA technology demonstration called CADRE (Cooperative Autonomous Distributed Robotic Exploration) is prepared for shipping in a clean room at the agency's Jet Propulsion Laboratory in Southern California on Jan. 29, 2025. CADRE aims to prove that a group of robots can collaborate to gather data without receiving direct commands from mission controllers on Earth. Its trio of rovers will use their cameras and ground-penetrating radars to send back imagery of the lunar surface and subsurface while testing out the novel software systems that enable them to work together as a team autonomously. Before embarking on the first leg of a multistage journey to the Moon, each rover was mated to its deployer system, which will lower it via tether from an Intuitive Machines lander onto the dusty lunar surface. Engineers flipped each rover-deployer pair over and attached it to an aluminum plate for safe transit. The rovers were then sealed into protective metal-frame enclosures that were fitted snuggly into metal shipping containers and loaded onto a truck for the drive to Intuitive Machines' Houston facility. Here, members of the project's assembly, test, and launch operations team hold the upside-down rover by temporary red handles in order to move it to a table where they'll attach it to the aluminum plate. A division of Caltech in Pasadena, California, JPL manages CADRE for the Game Changing Development program within NASA's Space Technology Mission Directorate in Washington. The technology demonstration was selected under the agency's Lunar Surface Innovation Initiative, which was established to expedite the development of technologies for sustained presence on the lunar surface. CADRE will launch as a payload on the third lunar lander mission by Intuitive Machines, called IM-3, under NASA's CLPS (Commercial Lunar Payload Services) initiative, which is managed by the agency's Science Mission Directorate, also in Washington. The agency's Glenn Research Center in Cleveland and its Ames Research Center in Silicon Valley, California, both supported the project. Motiv Space Systems designed and built key hardware elements at the company's Pasadena facility. Clemson University in South Carolina contributed research in support of the project. For more about CADRE, go to: https://go.nasa.gov/cadre https://photojournal.jpl.nasa.gov/catalog/PIA26427

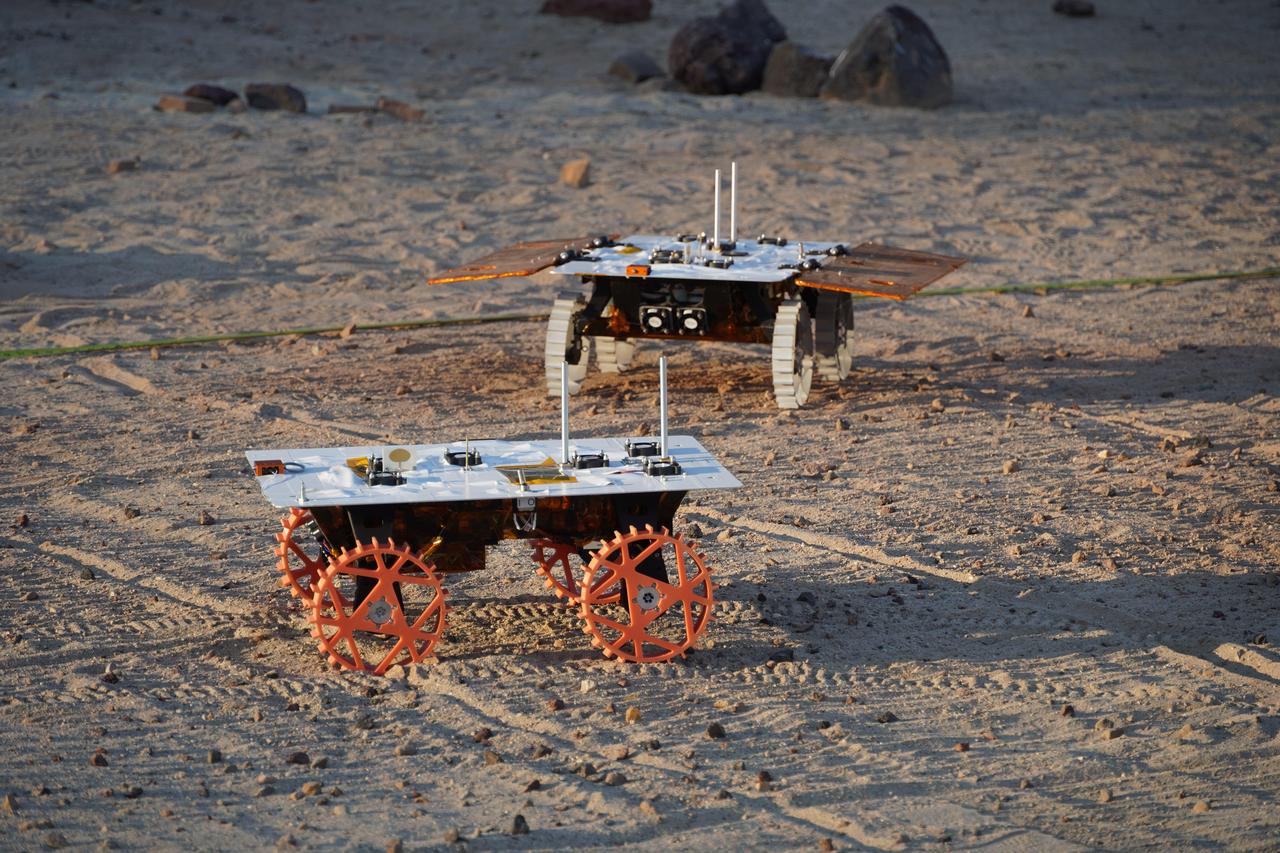
Members of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration team pose with two full-scale development model rovers in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in January 2024. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. Three small rovers will ride aboard a lunar lander that will carry the project's base station and camera assembly. The rovers shown here are similar in size and appearance to the flight models that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used in a series of Mars Yard tests that helped confirm CADRE hardware and software can work together to accomplish key goals for the project. https://photojournal.jpl.nasa.gov/catalog/PIA26170
With its solar panels open, a small rover that is bound for the Moon sits in a clean room at NASA's Jet Propulsion Laboratory in Southern California on Jan. 26, 2024. This is one of three rovers – each about the size of a carry-on suitcase – that are part of the agency's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. CADRE is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. https://photojournal.jpl.nasa.gov/catalog/PIA26169
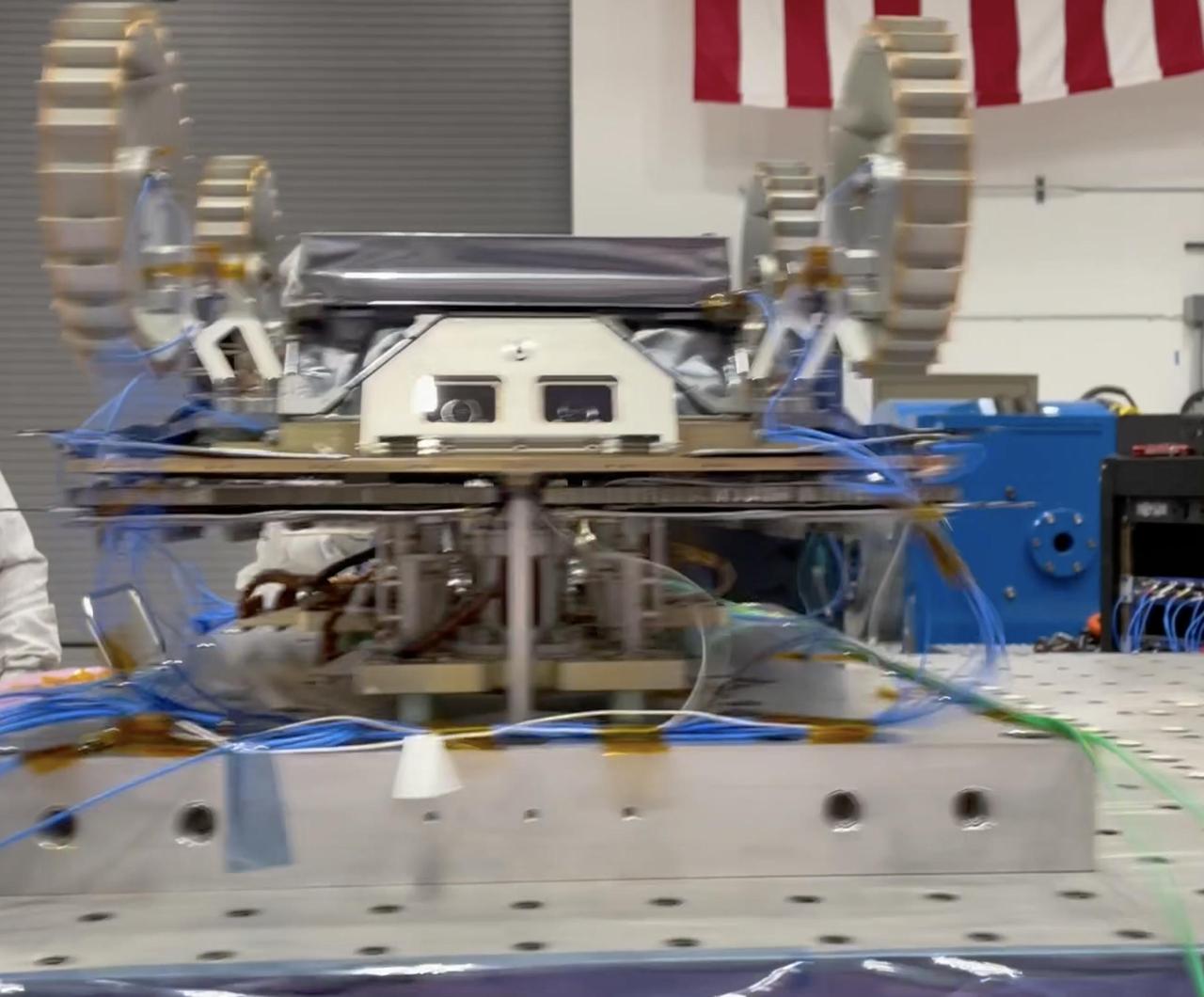
A small Moon-bound rover is clamped to a special "shaker table" that vibrates intensely to make sure the hardware will survive the jarring rocket ride out of Earth's atmosphere. This is one of three rovers – each about the size of a carry-on suitcase – that are part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. This vibration testing took place in November 2023 at a National Technical Systems test facility in Santa Clarita, California. In the video, the rover is shaken in two directions – first along the "z" axis and then the "x" axis. Another test, not shown, subjected the rover to a "y" axis vibration test. CADRE is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously &ndash without explicit commands from mission controllers on Earth. The three small rovers will ride aboard a lunar lander that will carry the project's base station and camera assembly. Video available at https://photojournal.jpl.nasa.gov/catalog/PIA26167

A development rover that is part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drives over a rock during its first autonomous drive around the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in June 2023. Under a canopy behind the rover are, from left, graduate student intern Natalie Deo and CADRE verification and validation lead Sawyer Brooks of JPL. The CADRE team successfully tested a new wheel design, surface navigation software, and mobility capabilities, among other aspects of the project. The rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. Slated to arrive at the Moon in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA25667

Members of the assembly, test, launch, and operations team for NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) project pose in a clean room at the agency's Jet Propulsion Laboratory in Southern California on Jan. 26, 2024, with three lunar rovers after their completion. Bound for the Moon, CADRE is a technology demonstration designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. Seen behind the rovers are hardware elements that will be mounted on the lunar lander aboard which CADRE will arrive at the Moon: the situational awareness camera assembly (SACA), one of the deployers that will lower the rovers onto the lunar surface, and the base station with which the rovers will communicate via mesh network radios. Back row, from left: Wei Chen Wilson Yeh, Mark White, Nathan Cheek, Baylor de los Reyes, Jacqueline Sly, Blair Emanuel, Josh Miller, Jonathan Tan, Sawyer Brooks, Libby Boroson, Leroy Montalvo, Tonya Beatty, Bert Turney, George Dupas, Leo Ortiz, and Nelson Serrano. Front row, from left: Kristopher Sherril, Coleman Richdale, Russell Smith, Daniel Esguerra, Will Raff, Justin Schachter, and Clara Nguyen. Shown on the cellphone held by Smith are absent ATLO team members Ara Kourchians, Molly Shelton, and Randy Ballat. https://photojournal.jpl.nasa.gov/catalog/PIA26165
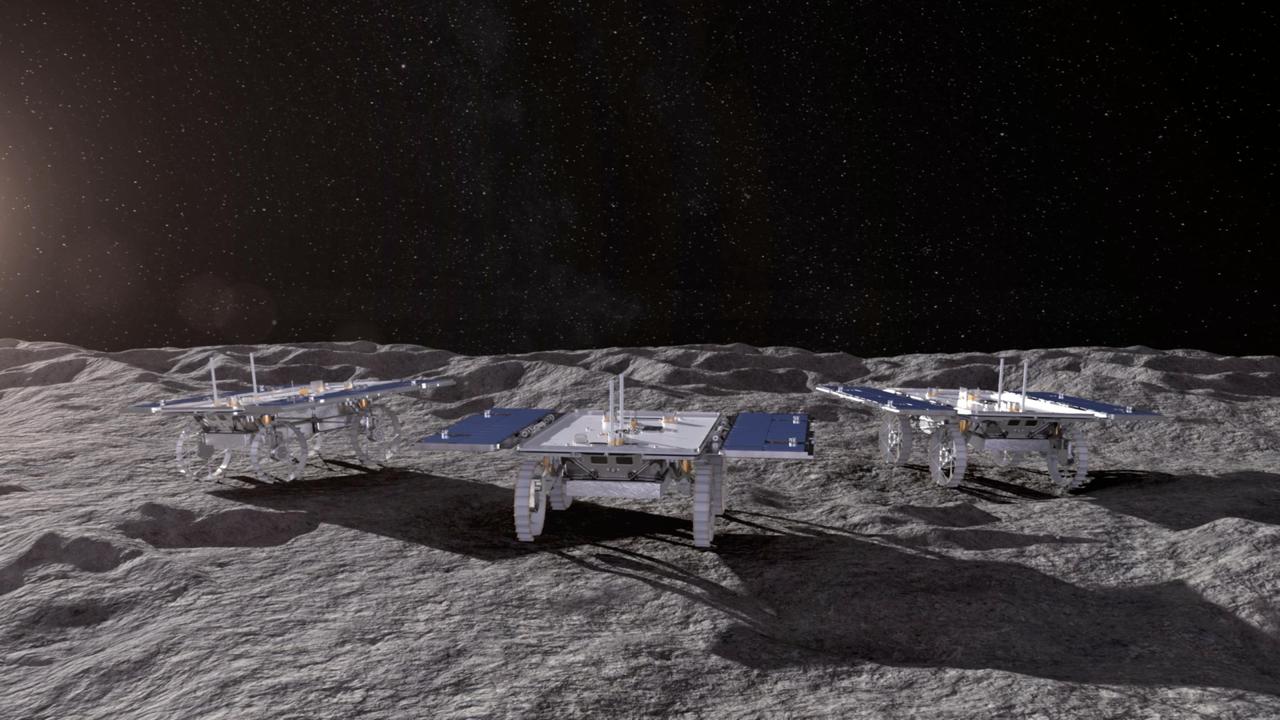
This animated artist's concept depicts three small rovers – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration headed for the Moon – driving together on the lunar surface. Motiv Space Systems in Pasadena, California, created the rendering and collaborated with NASA's Jet Propulsion Laboratory on critical rover and mobility functions. Slated to arrive aboard a lunar lander at the Reiner Gamma region of the Moon under NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard the lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Motiv contributed subsystems and hardware elements for three of four CADRE systems, including designing and building the mobility system and rover chassis, the base station, the rover deployers, and the motor controller boards. The company also procured and tested the actuators with the flight motor controller boards. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA26296

In a special chamber at NASA's Jet Propulsion Laboratory, engineers prepare to test a small rover that will go to the Moon as part of a NASA technology demonstration called CADRE (Cooperative Autonomous Distributed Robotic Exploration). The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. This electromagnetic interference and compatibility testing took place in November 2023 in a chamber designed to absorb radio waves. Such testing is intended to confirm that the operation of the electronic subsystems do not interfere with each other nor with those on the lander, and that the rover can survive expected electromagnetic disturbances. Justin Schachter, left, and Manny Soriano are shown. https://photojournal.jpl.nasa.gov/catalog/PIA26166

A development model rover that is part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration took its first autonomous drive around the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in June 2023. The CADRE team tested a new wheel design, surface navigation software, and mobility capabilities, among other aspects of the project. Engineer Kristopher Sherrill is shown recording video of the test. The rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. Slated to arrive at the Moon in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA25665
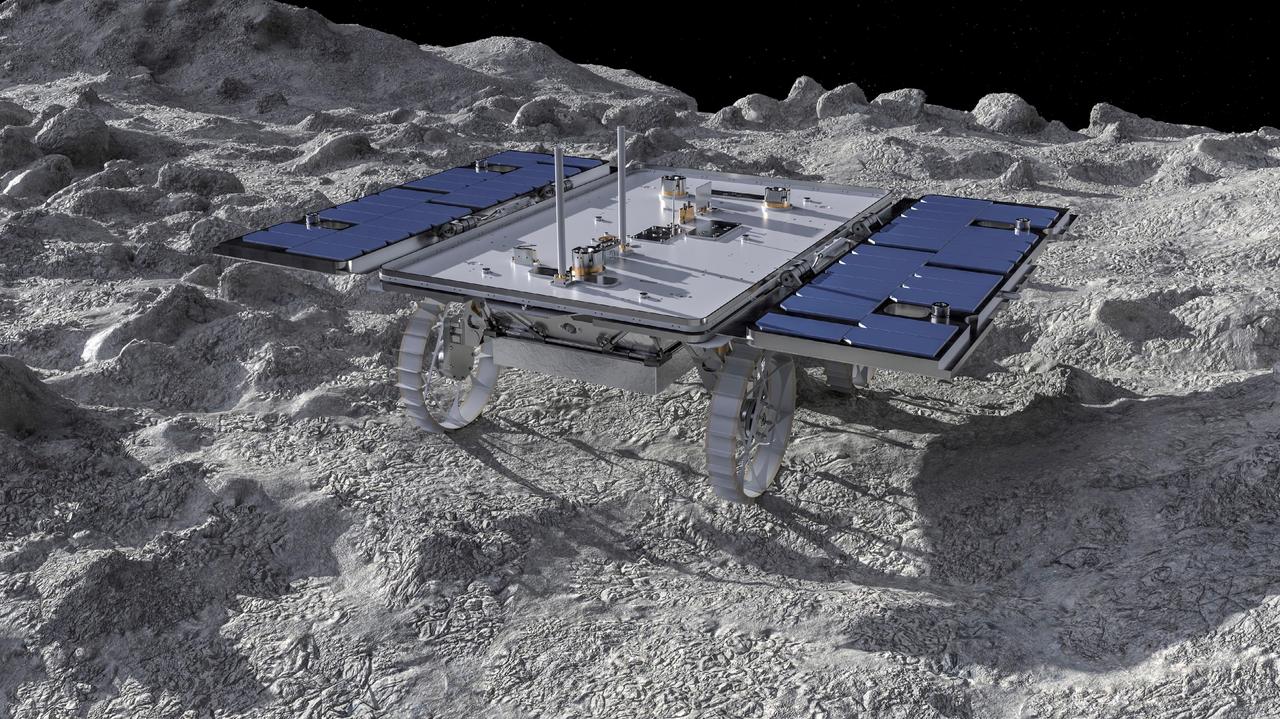
This artist's concept depicts a small rover – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration headed for the Moon – on the lunar surface. Motiv Space Systems in Pasadena, California, created the rendering and is collaborating with NASA's Jet Propulsion Laboratory on critical rover and mobility functions. Slated to arrive aboard a lunar lander in 2024 under NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Motiv contributed subsystems and hardware elements for three of four CADRE systems, including designing and building the mobility system and rover chassis, the base station, the rover deployers, and the motor controller boards. The company also procured and tested the actuators with the flight motor controller boards. https://photojournal.jpl.nasa.gov/catalog/PIA26161
One of three small rovers bound for the Moon took an autonomous test drive in a clean room at NASA's Jet Propulsion Laboratory in Southern California in December 2023. Along with a base station that will be mounted on a lunar lander, the three rovers make up the agency's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. This video was taken during a test of the rovers' ability to drive together as a team without direct commands from engineers. If the CADRE tech demo succeeds on the lunar surface, future missions could include teams of robots spreading out to take scientific measurements from different locations simultaneously, potentially in support of astronauts. In this test, the rover's solar panels were closed, and black plastic covers protected the ultralight aluminum wheels to prevent their grousers from catching on the clean-room floor. Video available at https://photojournal.jpl.nasa.gov/catalog/PIA26297
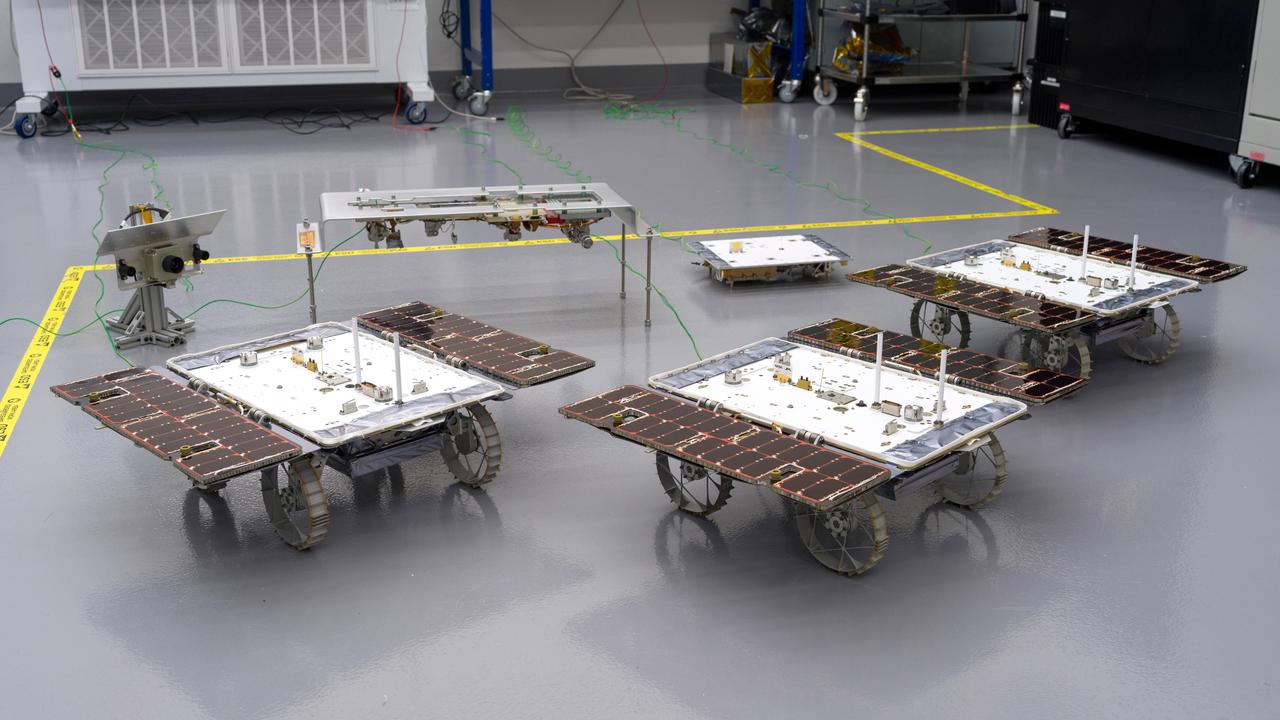
Three small rovers bound for the Moon – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration – are arrayed in a clean room at the agency's Jet Propulsion Laboratory in Southern California on Jan. 26, 2024. CADRE is designed to show that a group of robotic spacecraft can work together autonomously as a team to accomplish tasks and record data without constant direction from mission controllers on Earth. Each about the size of a carry-on suitcase, the rovers will ride to the Moon's surface aboard a lander equipped with the hardware elements that sit behind them in this image: from left, the situational awareness camera assembly, one of the deployers that will lower the rovers onto the lunar surface, and the base station with which the rovers will communicate via mesh network radios. https://photojournal.jpl.nasa.gov/catalog/PIA26346
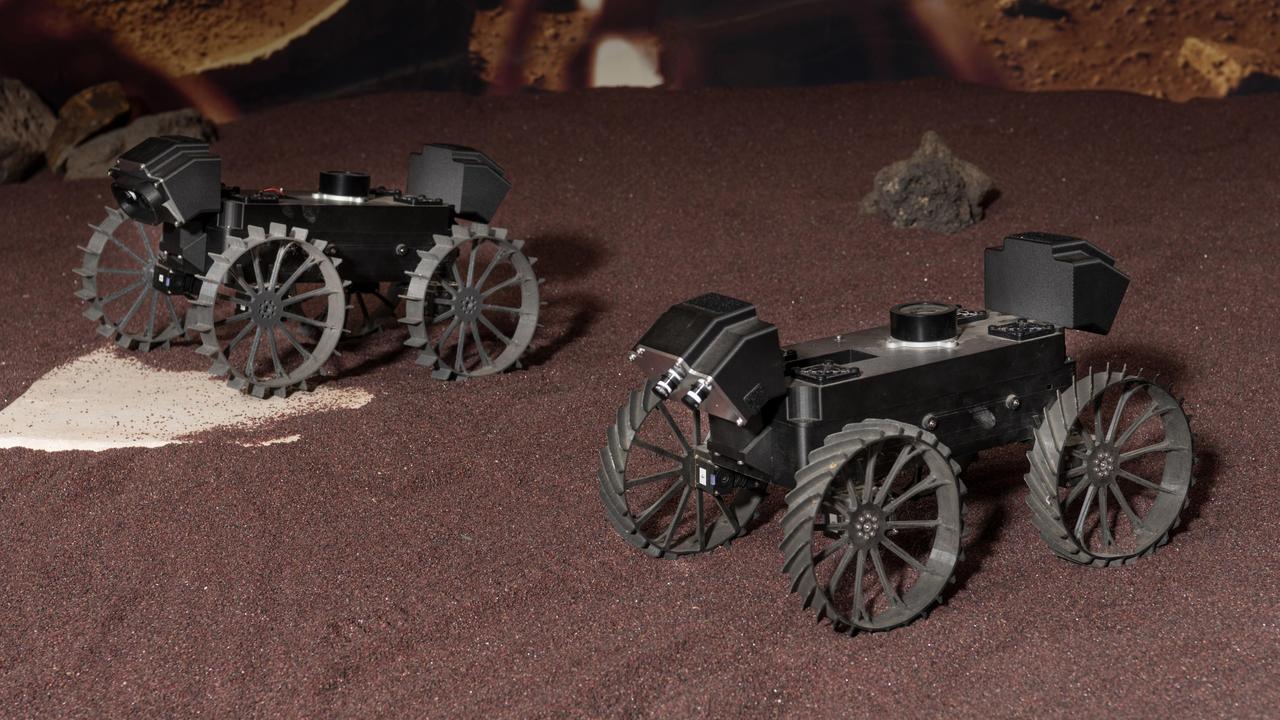
Two full-scale development model rovers that are part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drive in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in August 2023. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. The rovers being tested here are similar in size and appearance to the flight models – still being built at the time of this image – that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used for drive tests outside the clean room. In this image, one rover is fitted with a stand-in for solar panels, while the other rover is not. A series of Mars Yard tests with the development models confirmed CADRE hardware and software can work together to accomplish key goals for the project. The rovers drove together in formation. Faced with unexpected obstacles in the way, they adjusted their plans as a group by sharing updated maps and replanning coordinated paths. And when one rover was low on battery charge, the whole team paused so they could later continue together. Several drives were performed at night under large flood lamps so the rovers could experience extreme shadows and lighting that approximate what they'll encounter during the lunar daytime. https://photojournal.jpl.nasa.gov/catalog/PIA26168
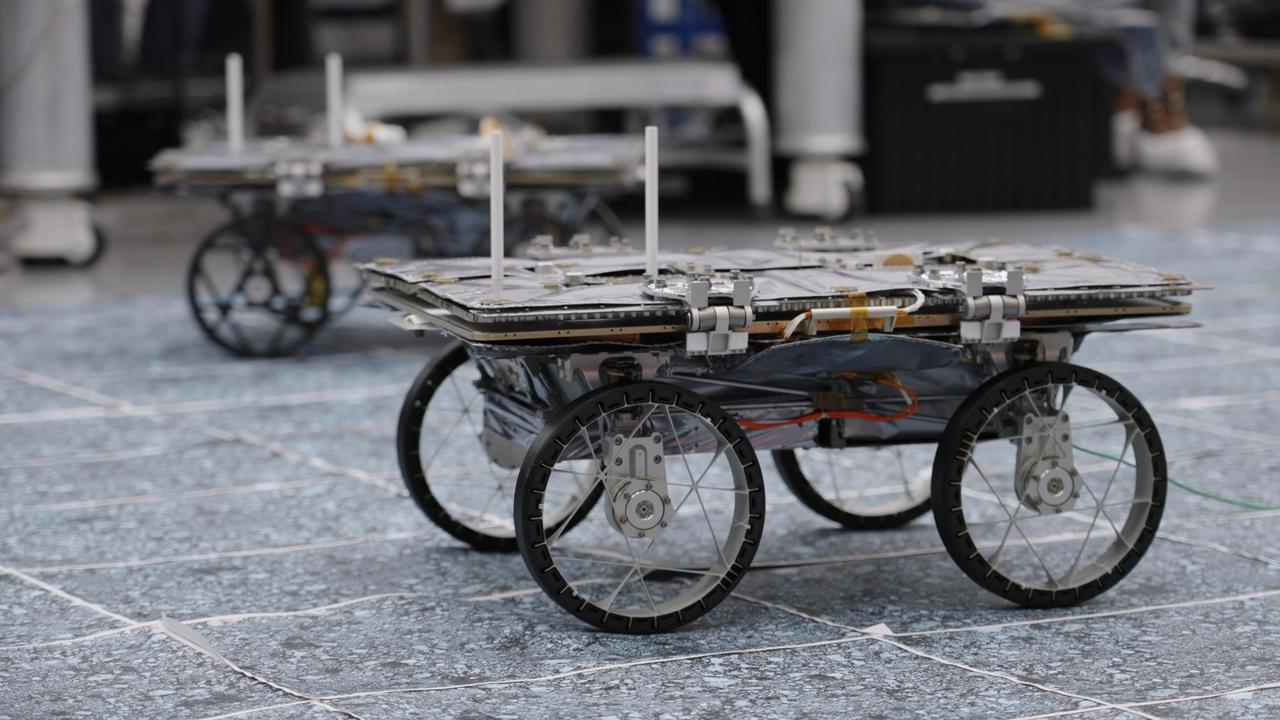
Prototypes of the rovers being built for NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration were tested at the agency's Jet Propulsion Laboratory in Southern California in August 2022. CADRE is a technology demonstration designed to show that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The CADRE team dubbed the seven plastic test prototypes the "Mercury 7" and named each after one of NASA's seven Project Mercury astronauts. John (for John Glenn) and Scott (for Scott Carpenter) are shown here in a sandbox during a test of the rovers' capability for driving in formation. The formation-driving algorithm will be used to help CADRE rovers map the lunar surface and subsurface with cameras and sensors. The prototypes are smaller than the three CADRE rovers slated to arrive at the Moon aboard a lander in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative. Those flight models will be about the size of a carry-on suitcase. https://photojournal.jpl.nasa.gov/catalog/PIA25666

The Earth-bound full-scale engineering model of NASA's Perseverance rover, called OPTIMISM, seems to peer down at a much smaller CADRE rover in a building in the Mars Yard at NASA's Jet Propulsion Laboratory in Southern California in June 2023. Short for Cooperative Autonomous Distributed Robotic Exploration, NASA's CADRE technology demonstration is slated to arrive at the Moon in spring 2024 as part of the agency's CLPS (Commercial Lunar Payload Services) initiative. CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. The development rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. https://photojournal.jpl.nasa.gov/catalog/PIA25668
An engineer prepares a small rover – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration that's headed to the Moon – for testing in a thermal vacuum chamber at the agency's Jet Propulsion Laboratory in Southern California in October 2023. Slated to arrive at the Moon in 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The rover being tested is the first flight model to be completed. Thermal vacuum testing simulates the harsh environment the rovers will face on the journey to the Moon and on the lunar surface: All the air is pumped out of the chamber and the temperature is cycled to high and low extremes. https://photojournal.jpl.nasa.gov/catalog/PIA25669

Engineers prepare a small rover – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration that's headed to the Moon – for testing in the thermal vacuum chamber behind them at the agency's Jet Propulsion Laboratory in Southern California in October 2023. Slated to arrive at the Moon in 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The rover being tested is the first flight model to be completed. Thermal vacuum testing simulates the harsh environment the rovers will face on the journey to the Moon and on the lunar surface: All the air is pumped out of the chamber and the temperature is cycled to high and low extremes. https://photojournal.jpl.nasa.gov/catalog/PIA25670

Engineers prepare three small Moon-bound rovers for a drive test in a clean room at the agency's Jet Propulsion Laboratory in Southern California in December 2023. Along with a base station that will be mounted on a lunar lander, the rovers make up the CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. This image was taken during a test of the rovers' ability to drive together as a team autonomously, without explicit commands from engineers. If the project succeeds, future missions could include teams of robots spreading out to take simultaneous, distributed scientific measurements, potentially in support of astronauts. In this test, the rovers had their solar panels closed, and they wore protective black plastic covers over their ultralight aluminum wheels to prevent the wheels' grousers from catching on the clean room floor. https://photojournal.jpl.nasa.gov/catalog/PIA26164

Penny Pettigrew chats in real time with a space station crew member conducting an experiment in microgravity some 250 miles overhead. The Payload Operations Integration Center cadre monitor science communications on station 24 hours a day, seven days a week, 365 days per year.

Experimental study on material flammability and flame spreading in partial gravity aboard the DC-9 aircraft, based at GRC. Pictured in the center is John Yaniec, the DC-9 test director, who is coordinating reduced-gravity maneuver timing between the experimenters and the cockpit and ensuring safe behavior of the research cadre. Pictured on the left is crew member Jerry Auschuetz who is monitoring the experiment. Floating on the right is researcher Kurt Sacksteder.

CAPE CANAVERAL, Fla. -- A cadre of shuttle technicians monitors space shuttle Atlantis as it is backed out of Orbiter Processing Facility-2 for its move to the Vehicle Assembly Building (VAB) at NASA's Kennedy Space Center in Florida. Atlantis will be stored temporarily in the VAB while transition and retirement processing resumes on shuttle Endeavour in the processing hangar. Endeavour is being prepared for public display at the California Science Center in Los Angeles. A groundbreaking was held Jan. 18 for Atlantis' future home -- a 65,000-square-foot exhibit in Shuttle Plaza at the Kennedy Space Center Visitor Complex. For additional information, visit http://www.nasa.gov/shuttle. Photo credit: NASA/Charisse Nahser

During a tour of SpaceX headquarters in Hawthorne, California, commercial crew astronauts Bob Behnken, left, and Eric Boe participate in joint test team training using mockup components of the Crew Dragon on Feb. 23, 2017. Crew Dragon is being developed and manufactured in partnership with NASA's Commercial Crew Program to return human spaceflight capabilities to the U.S.

During a tour of SpaceX headquarters in Hawthorne, California, commercial crew astronauts Suni Williams, left, and Doug Hurley participate in joint test team training using mockup components of the Crew Dragon on Feb. 23, 2017. Crew Dragon is being developed and manufactured in partnership with NASA's Commercial Crew Program to return human spaceflight capabilities to the U.S.

During a tour of SpaceX headquarters in Hawthorne, California, commercial crew astronauts Bob Behnken, left, and Eric Boe participate in joint test team training using mockup components of the Crew Dragon on Feb. 23, 2017. Mike Good, program manager for Crew Operations and Testing at Johnson Space Center in Houston, is in the background. Crew Dragon is being developed and manufactured in partnership with NASA's Commercial Crew Program to return human spaceflight capabilities to the U.S.

Veterans of the X-15 flight research program, most of them now retired, reunited at Dryden on the 40th anniversary of the last X-15 flight on Oct. 24, 1968 for a historical colloquium on the X-15 by noted aerospace historian and author Dennis Jenkins on Oct. 24, 2008. Gathered in front of the replica of X-15 #3 the were (from left) Johnny Armstrong, Betty Love, Paul Reukauf, Bob Hoey, Dave Stoddard, Dean Webb, Vince Capasso, Bill Dana (who flew the last flight), John McTigue and T.D. Barnes. Jenkins, the author of "X-15: Extending the Frontiers of Flight," maintained during his presentation that despite setbacks, the X-15 program became the most successful of all the X-plane research programs due to the can-do, fix-the-problem and go-fly-again attitude of the X-15's cadre of engineers and technicians.

This is a photo of soybeans growing in the Advanced Astroculture (ADVASC) Experiment aboard the International Space Station (ISS). The ADVASC experiment was one of the several new experiments and science facilities delivered to the ISS by Expedition Five aboard the Space Shuttle Orbiter Endeavor STS-111 mission. An agricultural seed company will grow soybeans in the ADVASC hardware to determine whether soybean plants can produce seeds in a microgravity environment. Secondary objectives include determination of the chemical characteristics of the seed in space and any microgravity impact on the plant growth cycle. Station science will also be conducted by the ever-present ground crew, with a new cadre of controllers for Expedition Five in the ISS Payload Operations Control Center (POCC) at NASA's Marshall Space Flight Center in Huntsville, Alabama. Controllers work in three shifts around the clock, 7 days a week, in the POCC, the world's primary science command post for the Space Station. The POCC links Earth-bound researchers around the world with their experiments and crew aboard the Space Station.

Expedition Five crewmembers include (left to right) Cosmonaut Verleri Korzun, Commander; Astronaut Peggy Whitson, flight engineer; and Cosmonaut Sergei Treschev, flight engineer. Launched aboard the Space Shuttle Orbiter Endeavour, STS-111, in April 2002, Expedition Five replaced Expedition Four on the International Space Station (ISS) for a scheduled 4-month mission. Expedition Five carried several new experiments and science facilities to the ISS. The research compliment included 24 new and continuing investigations:10 human life sciences studies, 6 in microgravity, 5 in space product development, and 3 sponsored by the Office of Space Flight. The new experiments are expected to lead to new insights in the fields of materials, plant science, commercial biotechnology, and the long term effects of space flight on humans. 280 hours will be devoted to research in addition to the continuing building of the ISS. Station science will also be conducted by the ever-present ground crew, with a new cadre of controllers for Expedition Five in the ISS Payload Operations Control Center (POCC) at NASA's Marshall Space Flight Center in Huntsville, Alabama. Controllers work in three shifts around the clock, 7 days a week, in the POCC, the world's primary science command post for the Space Station. The POCC links Earth-bound researchers around the world with their experiments and crew aboard the Space Station.

Expedition Five crewmember and flight engineer Peggy Whitson displays the progress of soybeans growing in the Advanced Astroculture (ADVASC) Experiment aboard the International Space Station (ISS). The ADVASC experiment was one of the several new experiments and science facilities delivered to the ISS by Expedition Five aboard the Space Shuttle Orbiter Endeavor STS-111 mission. An agricultural seed company will grow soybeans in the ADVASC hardware to determine whether soybean plants can produce seeds in a microgravity environment. Secondary objectives include determination of the chemical characteristics of the seed in space and any microgravity impact on the plant growth cycle. Station science will also be conducted by the ever-present ground crew, with a new cadre of controllers for Expedition Five in the ISS Payload Operations Control Center (POCC) at NASA's Marshall Space Flight Center in Huntsville, Alabama. Controllers work in three shifts around the clock, 7 days a week, in the POCC, the world's primary science command post for the Space Station. The POCC links Earth-bound researchers around the world with their experiments and crew aboard the Space Station.

The Aircraft Engine Research Laboratory’s pilot corps during the final days of World War II: from left to right, Joseph Vensel, Howard Lilly, William Swann, and Joseph Walker. William “Eb” Gough joined the group months after this photograph. These men were responsible for flying the various National Advisory Committee for Aeronautics (NACA) aircraft to test new engine modifications, study ice buildup, and determine fuel performance. Vensel, a veteran pilot from Langley, was the Chief of Flight Operations and a voice of reason at the laboratory. In April 1947 Vensel was transferred to lead the new Muroc Flight Tests Unit in California until 1966. Lilly was a young pilot with recent Navy experience. Lilly also flew in the 1946 National Air Races. He followed Vensel to Muroc in July 1947 where he became the first NACA pilot to penetrate the sound barrier. On May 3, 1948, Lilly became the first NACA pilot to die in the line of duty. Swann was a young civilian pilot when he joined the NACA. He spent his entire career at the Cleveland laboratory, and led the flight operations group from the early 1960s until 1979. Two World War II veterans joined the crew after the war. Walker was a 24-year-old P–38 reconnaissance pilot. He joined the NACA as a physicist in early 1945 but soon worked his way into the cadre of pilots. Walker later gained fame as an X-plane pilot at Muroc and was killed in a June 1966 fatal crash. Gough survived being shot down twice during the war and was decorated for flying rescue missions in occupied areas.