
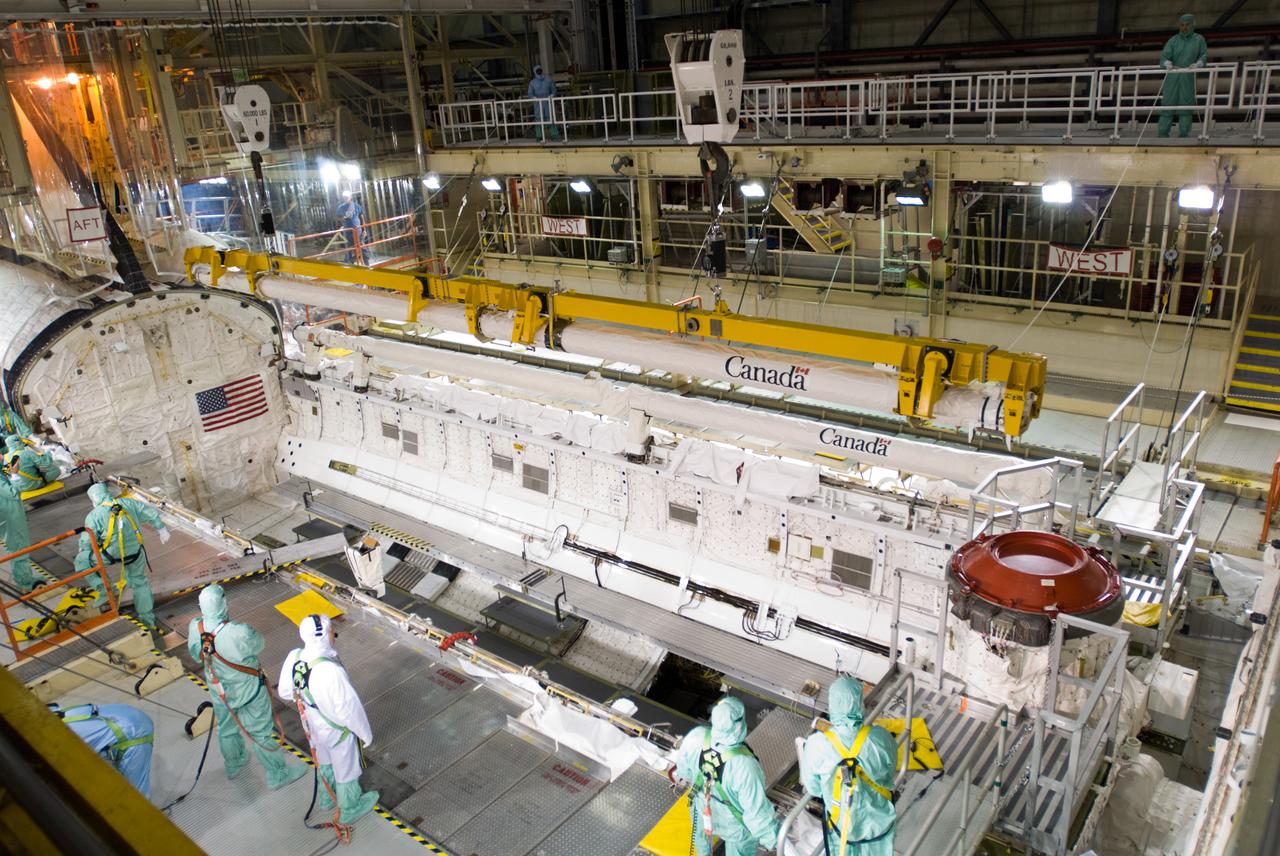
CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, the remote manipulator system, or RMS, has been crated and prepared for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, the remote manipulator system, or RMS, has been crated and prepared for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

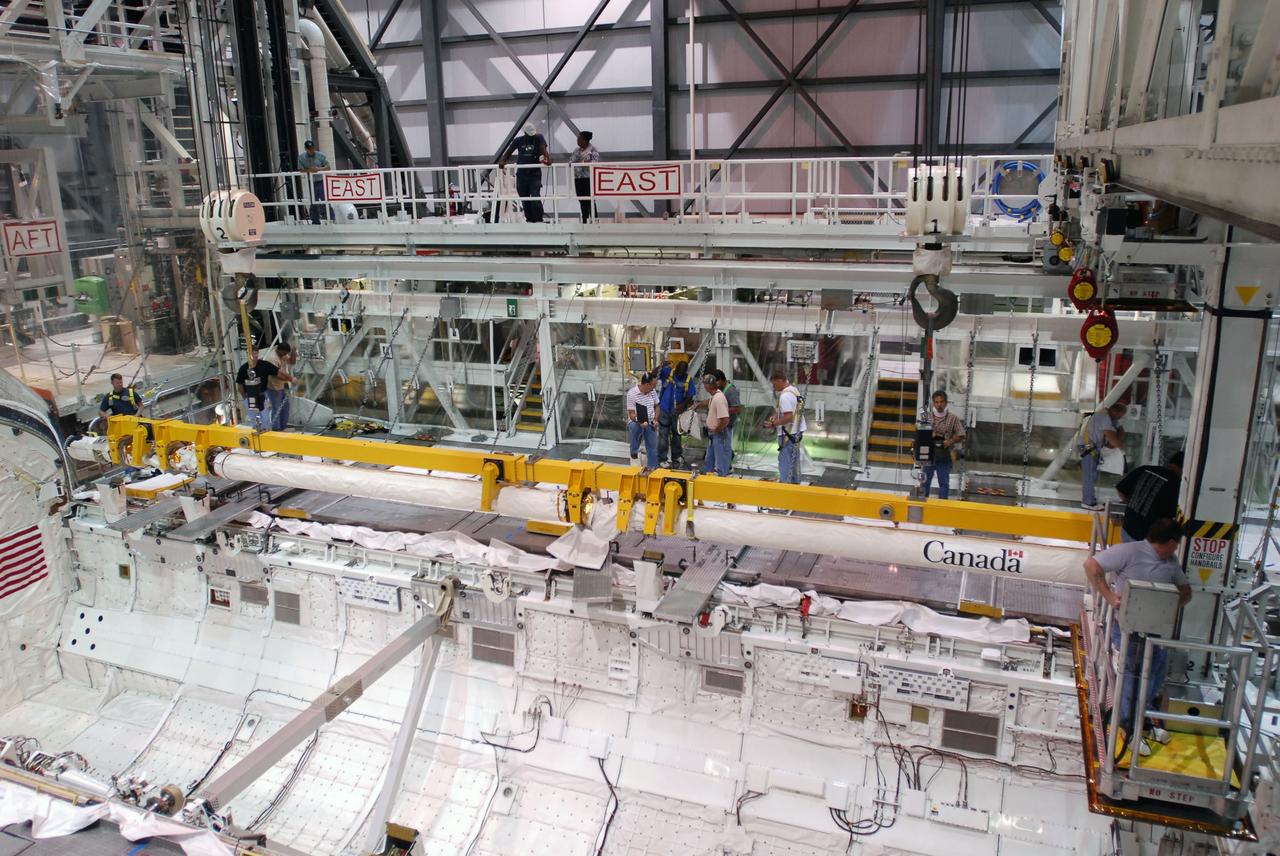
CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers attach lifting cranes to the container holding the remote manipulator system, or RMS. The RMS is placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers help guide the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lowered onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers help guide the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lowered onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, a United Space Alliance worker attaches lifting cranes to the container holding the remote manipulator system, or RMS. The RMS will be placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers position the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

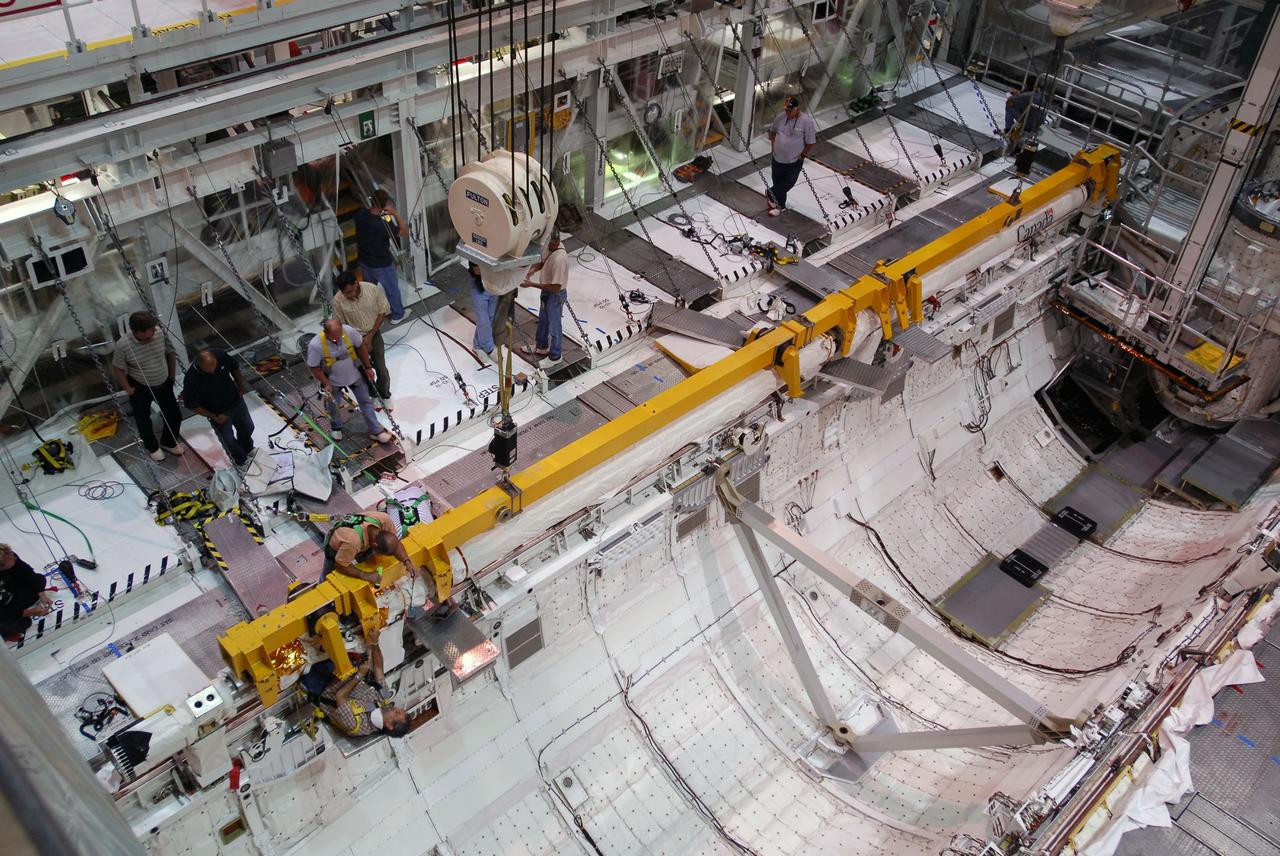
CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lifted. The RMS will be placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, the orbiter boom sensor system is lifted by a crane for installation in space shuttle Discovery’s payload bay for mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, workers prepare to install the orbiter boom sensor system in the payload bay of space shuttle Discovery to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, the orbiter boom sensor system is lowered by a crane into the payload bay of space shuttle Discovery for installation to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, workers install the orbiter boom sensor system in the payload bay of space shuttle Discovery to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, space shuttle Discovery’s payload bay is readied for installation of the orbiter boom sensor system to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, the orbiter boom sensor system is lifted by a crane for installation in space shuttle Discovery’s payload bay for mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann
CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, the orbiter boom sensor system is moved into position by a crane over space shuttle Discovery for installation in its payload bay to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA_Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, the orbiter boom sensor system is installed in the payload bay of space shuttle Discovery to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, workers attach a crane to the orbiter boom sensor system that will be installed in the payload bay of space shuttle Discovery to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Orbiter Processing Facility’s bay 3, workers prepare to install the orbiter boom sensor system in the payload bay of space shuttle Discovery to support mission STS-128. The 50-foot-long boom attaches to the shuttle arm and provides equipment to inspect the shuttle's heat shield while in space. It contains an intensified television camera (ITVC) and a laser dynamic range imager, which are mounted on a pan and tilt unit, and a laser camera system (LCS) mounted on a stationary bracket. The STS-128 flight will carry science and storage racks to the International Space Station on space shuttle Discovery. Launch of Discovery is targeted for Aug. 6. Photo credit: NASA/Jim Grossmann

iss062e000422 (Feb. 7, 2020) --- The Canadarm2 robotic arm, from the Canadian Space Agency, is poised to capture the Cygnus space freighter from Northrop Grumman with NASA astronaut Andrew Morgan at the robotics controls in the cupola on Sunday, Feb. 16, 2020. Ground controllers will take over afterward and remotely command the Canadarm2 to install Cygnus to the Unity module where it will stay for three months.

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted toward a transportation canister following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers secure the remote manipulator system, or RMS, in a transportation canister following its removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane lifts the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is suspended from the ceiling following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane is attached to the remote manipulator system, or RMS, in space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, tethered workers prepare to remove the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

ISS045e152270 (12/01/2015) --- NASA astronaut Kjell Lindgren takes images of the Earth on board the International Space Station on Dec. 1, 2015 from the Cupola, the 360 degree viewing and robotic Canadarm 2 control area. Later this area will be used by Lindgren and NASA astronaut Scott Kelly to use the station’s Canadarm 2 robotic arm to reach out and grapple the Orbital ATK CRS-4 "Cygnus" spaceship full of equipment and supplies.

NASA astronaut Terry Virts of Expedition 43 on the International Space Station checks the remote control Canadarm2 on Apr.26, 2015. The Canadarm 2 is used to grapple arriving spacecraft and moving them to their docking ports.

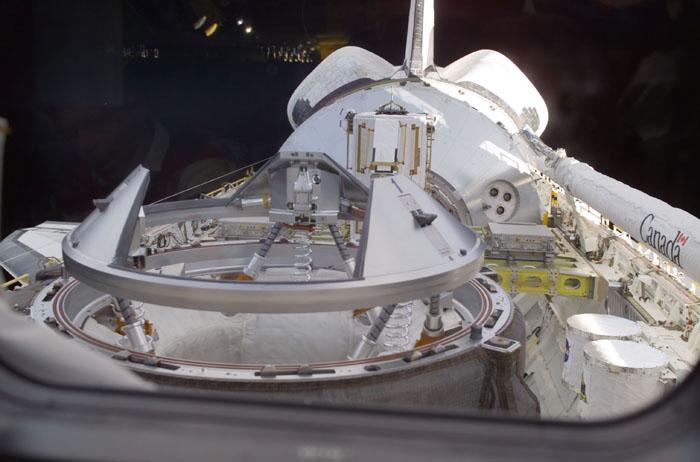
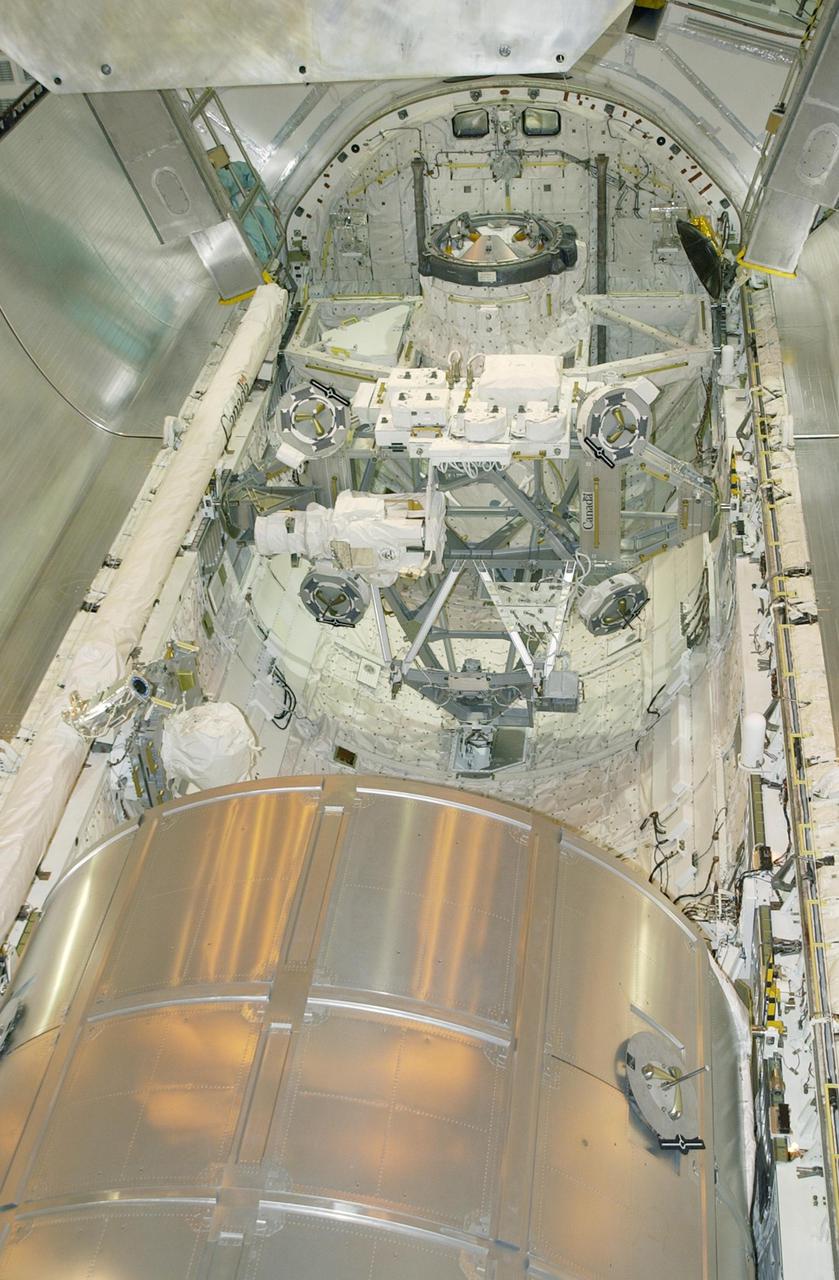
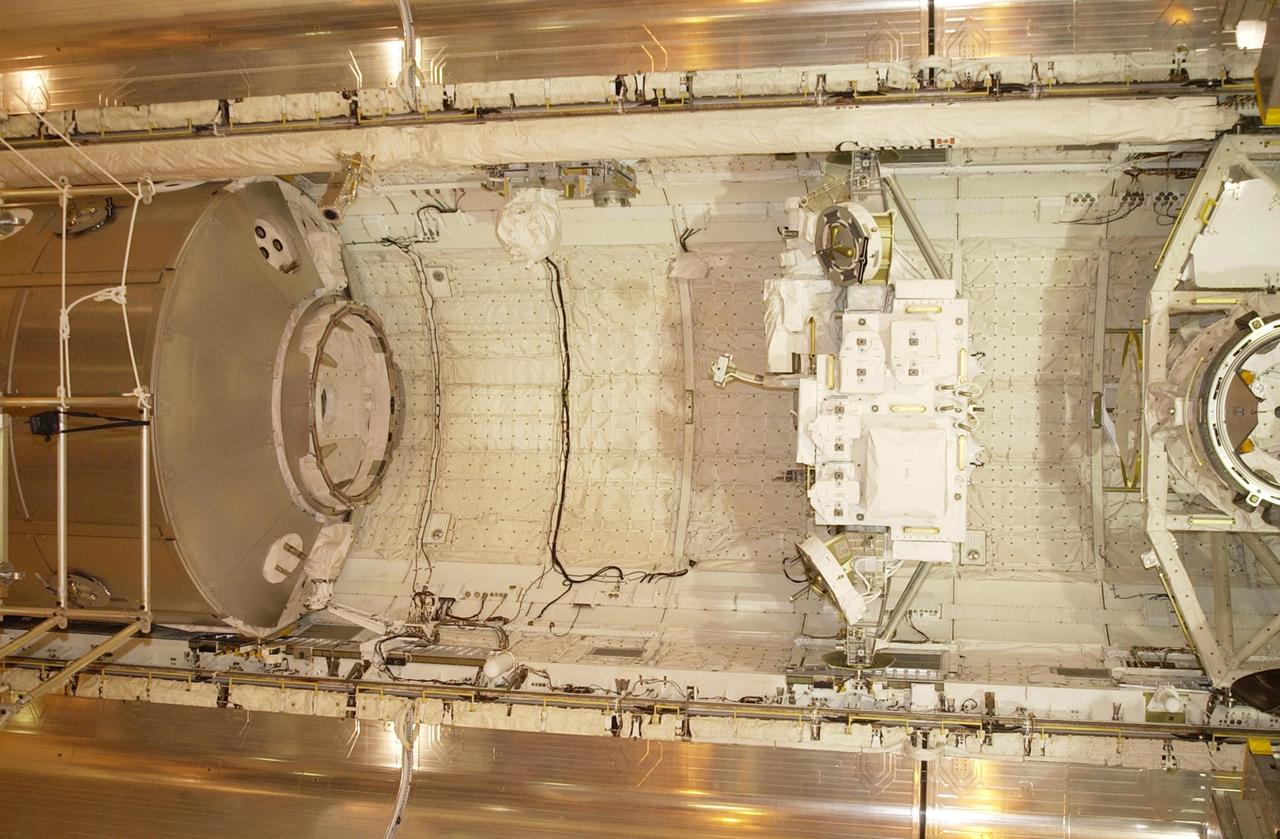
S100-E-5018 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5015 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5017 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5002 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

ISS042E119635 (01/11/2015) --- US Astronaut Barry Wilmore, Expedition 42 Commander sits in the International Space Stations CUPOLA after successfully controling the robotic Canadarm to grapple the SPACEX Dragon spacecraft, bringing it into the port where it can be unloaded. It carried 2 and a half tons of supplies and science equipment.

S134-E-007186 (19 May 2011) --- In the grasp of space shuttle Endeavour?s robotic Canadarm, the Alpha Magnetic Spectrometer-2 (AMS) is moved from Endeavour?s payload bay to be handed off to the International Space Station?s Canadarm2 for installation on the station?s starboard truss. Photo credit: NASA
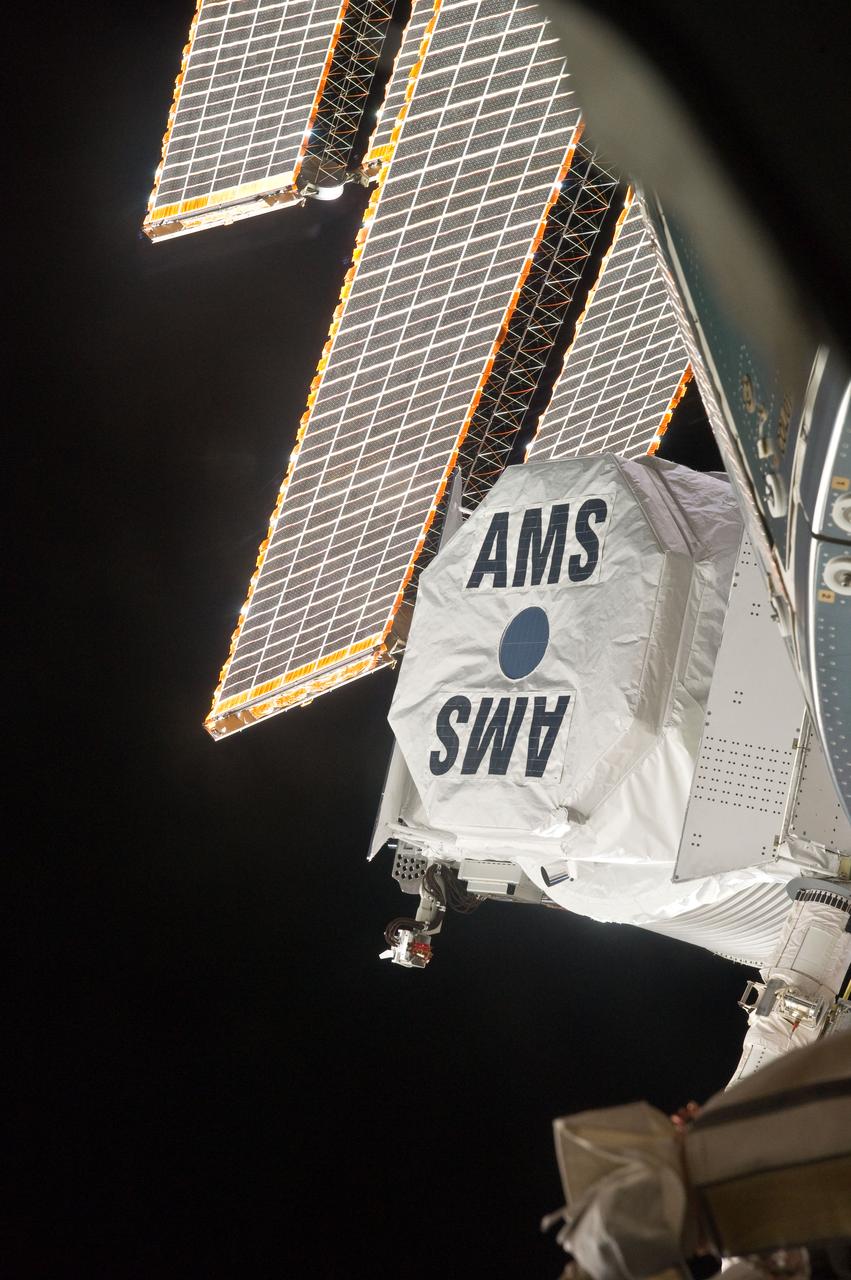
S134-E-007189 (19 May 2011) --- In the grasp of space shuttle Endeavour?s robotic Canadarm, the Alpha Magnetic Spectrometer-2 (AMS) is moved from Endeavour?s payload bay to be handed off to the International Space Station?s Canadarm2 for installation on the station?s starboard truss. Photo credit: NASA

S122-E-006381 (8 Feb. 2008) --- Backdropped by the blackness of space and Earth's horizon, Atlantis' orbiter docking system (foreground) and the Canadarm Remote Manipulator System (RMS) in the payload bay are featured in this image photographed by a STS-122 crewmember during flight day two activities.

STS105-E-5037 (11 August 2001) --- One of the STS-105 crew members on the flight deck of the Earth-orbiting Space Shuttle Discovery used a digital still camera to record this image of the partially illuminated portside cargo bay and the silhouetted Orbiter Docking System's docking mechanism. The shuttle's Canadarm or Remote Manipulator System (RMS) arm is in its stowed position at right.

STS105-E-5067 (12 August 2001) --- One of the STS-105 crew members on the aft flight deck of the Space Shuttle Discovery used a digital still camera to record this close-up view of the docking process between the shuttle and the International Space Station (ISS). The shuttle’s Canadarm or Remote Manipulator System (RMS) arm is in its stowed position at right.

ISS043E122264 (04/17/2015) --- The Canadarm 2 reaches out to grapple the SpaceX Dragon cargo spacecraft and prepare it to be pulled into its port on the International Space Station. Robotics officers at Mission Control, in the Johnson Space Center Houston Texas will command the Canadarm2 robotic arm to maneuver Dragon to its installation position at the Earth-facing port of the Harmony module where it will reside for the next five weeks.

A Canadian "handshake" in space occurred on April 28, 2001, as the Canadian-built space station robotic arm (Canadarm-2) transferred its launch cradle over to Endeavor's robotic arm. Marning the controls from the shuttle's aft flight deck, Canadian Mission Specialist Chris A. Hadfield of the Canadian Space Agency (CSA) was instrumental in the activity. The Spacelab pallet that carried the Canadarm2 robotic arm to the station was developed at the Marshall Space Flight Center (MSFC) in Huntsville, Alabama.
STS105-E-5018 (11 August 2001) --- One of the STS-105 crew members on the flight deck of the Earth-orbiting Space Shuttle Discovery used a digital still camera to record this image of the Orbiter Docking System's docking mechanism in the cargo bay. The shuttle's Canadarm or Remote Manipulator System (RMS) arm is in its stowed position on the port side.

ISS039-E-017064 (26 April 2014) --- One of the Expedition 39 crew members, positioned in the Cupola of the International Space Station, photographed this view of the SpaceX Dragon berthed to the orbital outpost for several days. A thin sliver of Earth's atmosphere runs through the center of the scene. The Space Station Remote Manipulator System (SSRMS) arm or Canadarm 2 is in the left side of the frame.

ISS047e050792 (04/10/2016) --- The SpaceX Dragon cargo craft approaches to be grappled by the International Space Station Expedition 47 crew. This view is from the Cupola where the primary controls of the Canadarm 2 are located. Crewmembers use the robotic arm to grapple the spaceship before berthing it to the Earth-facing port on the Harmony module. The spacecraft delivered about 7,000 pounds of science and research investigations, including the Bigelow Expandable Activity Module, known as BEAM.
KENNEDY SPACE CENTER, FLA. -- In the Press Site auditorium, NASA Administrator Sean O'Keefe participates in a media briefing following the launch scrub of Space Shuttle mission STS-111. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- Expedition 5 Commander Valery Korzun (RSA) steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- Expedition 5 cosmonaut Sergei Treschev (RSA) steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- With the Multi-Purpose Logistics Module Leonardo installed in Endeavour, one of the payload bay doors (left) has been closed. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT
KENNEDY SPACE CENTER, FLA. -- Workers at Launch Pad 39A check the fittings on the payload bay of Endeavour before the bay doors close. The view is looking down into the payload bay. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell and Pilot Paul Lockhart step down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT
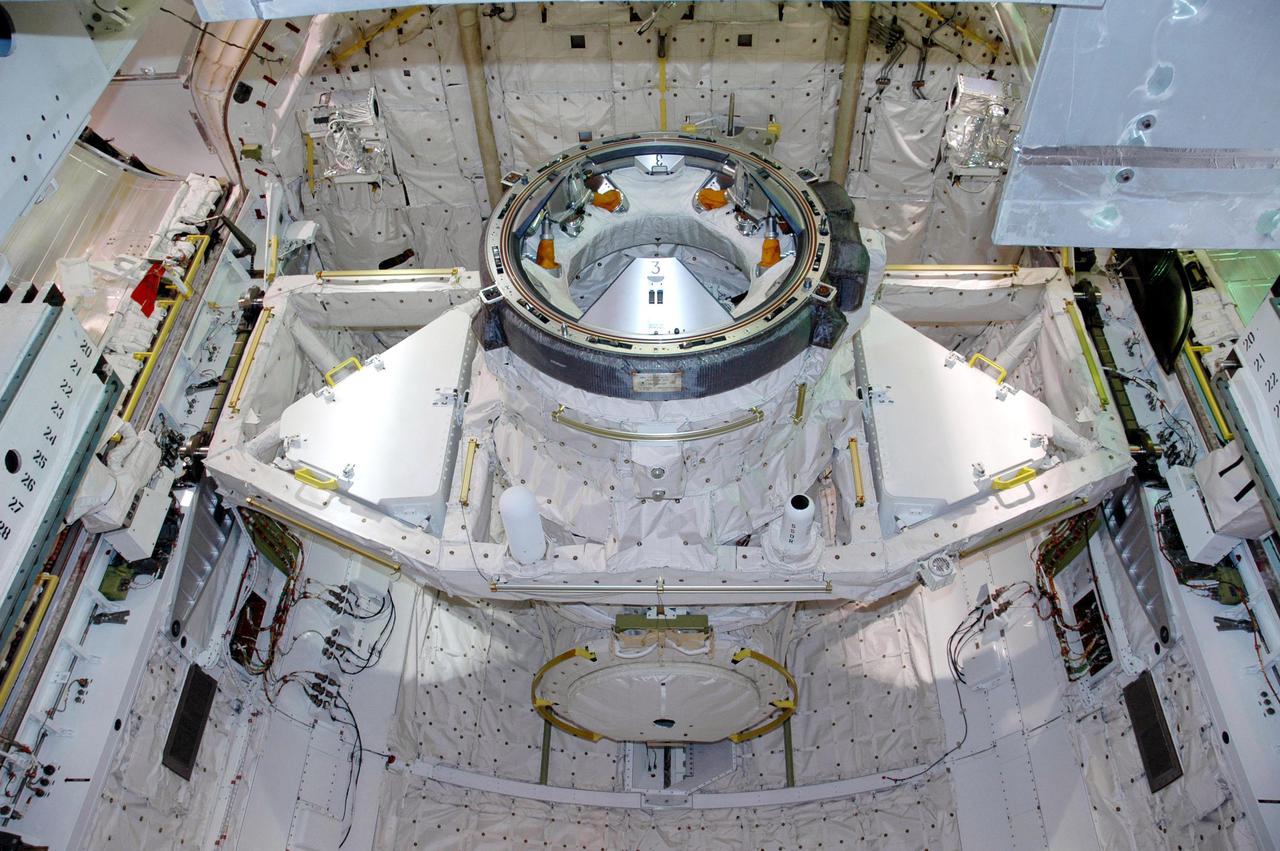
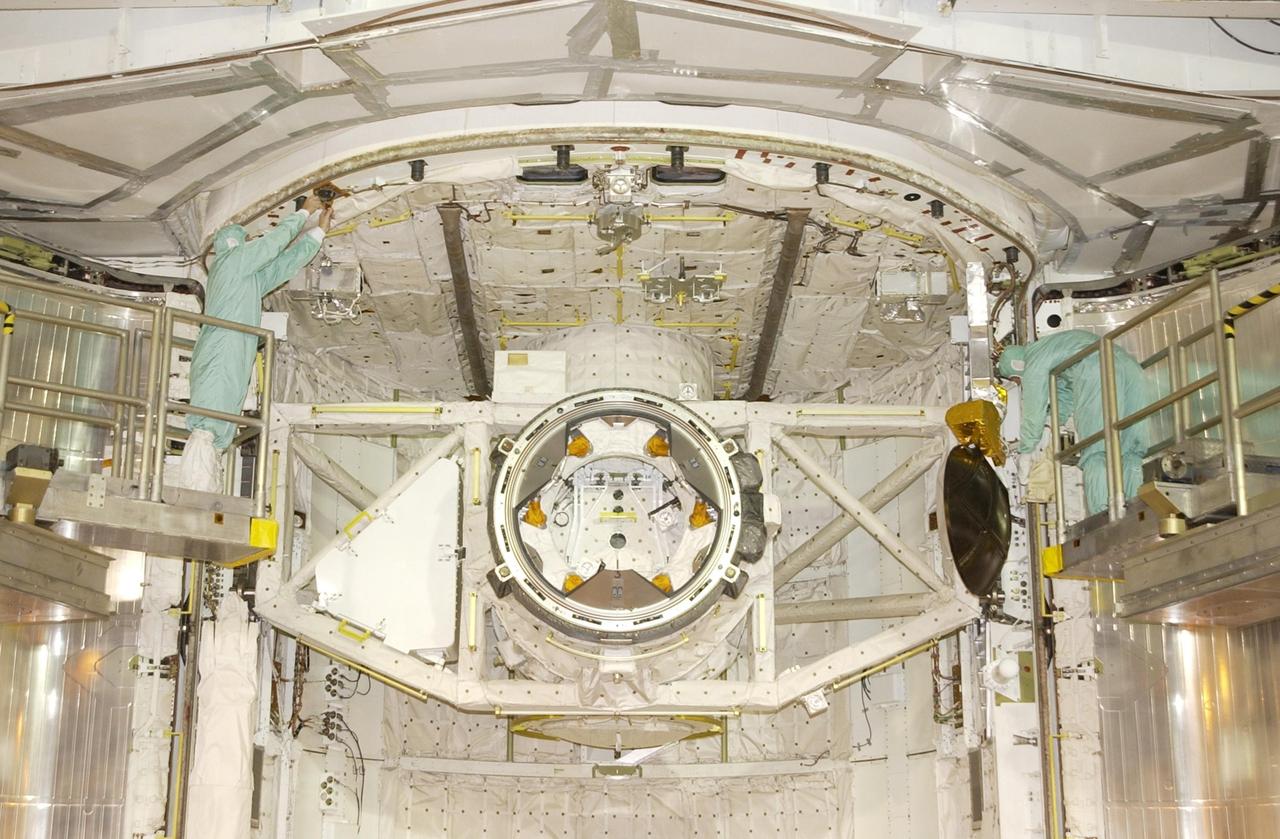
KENNEDY SPACE CENTER, FLA. - In the Payload Changeout Room on Launch Pad 39B, the payloads for Return to Flight mission STS-114 are being transferred to Discovery’s payload bay. Seen here is the airlock, already installed in the payload bay. Payloads being installed are a Control Moment Gyro, the Thermal Protection System Detailed Test Objective box, which is placed on the Lightweight Multi-Purpose Experiment Support Structure Carrier, External Stowage Platform 2 and Multi-Purpose Logistics Module Raffaello. Already installed in the payload bay are the airlock, the Canadarm 2, or Shuttle arm, and the Orbiter Boom Sensor System. The launch window for mission STS-114 extends from July 13 to July 31.

KENNEDY SPACE CENTER, FLA. - In the Payload Changeout Room on Launch Pad 39B, the payloads for Return to Flight mission STS-114 are being transferred to Discovery’s payload bay. Seen here is the External Stowage Platform 2. Other payloads includes a Control Moment Gyro and the Thermal Protection System Detailed Test Objective box, which is placed on the Lightweight Multi-Purpose Experiment Support Structure Carrier, and Multi-Purpose Logistics Module Raffaello. Already installed in the payload bay are the airlock, the Canadarm 2, or Shuttle arm, and the Orbiter Boom Sensor System. The launch window for mission STS-114 extends from July 13 to July 31.

KENNEDY SPACE CENTER, FLA. -- In the Press Site auditorium, space agency officials participate in a media briefing following the launch scrub of Space Shuttle mission STS-111. From left are NASA Administrator Sean O'Keefe, French Space Agency President Dr. Alain Bensoussan, and Canadian Space Agency President Dr. Marc Garneau. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

ISS027-E-032533 (18 May 2011) --- This view of space shuttle Endeavour’s forward section, including a partial view of the crew cabin, forward payload bay, docking mechanism and Canadarm, was provided by an Expedition 27 crew member during a survey of the approaching STS-134 vehicle prior to docking with the International Space Station. As part of the survey and part of every mission's activities, Endeavour performed a back-flip for the rendezvous pitch maneuver (RPM). The image was photographed with a digital still camera, using a 400mm lens at a distance of about 600 feet (180 meters).

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart waits for his helmet during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Lockhart's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. - At Launch Pad 39A, Multi-Purpose Logistics Module Leonardo is ready for installation into Endeavour's payload bay for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Philippe Perrin (CNES) smiles during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Perrin's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew
KENNEDY SPACE CENTER, FLA. -- In the IMAX-2 Theater at the Visitor Complex, NASA Administrator Sean O'Keefe conducts the Administrator's Briefing for specially invited guests attending the launch of mission STS-111. The briefing is a regularly scheduled event in KSC's prelaunch activities. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is scheduled for May 30 at 7:44 p.m. EDT

KENNEDY SPACE CENTER, FLA. - Expedition 5 astronaut Peggy Whitson steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT
KENNEDY SPACE CENTER, FLA. -- The Multi-Purpose Logistics Module Leonardo (bottom of photo) is being installed in Endeavour's payload bay for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist_roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell suits up for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Cockrell's fifth Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

Astronaut Michael L. Gernhardt, STS-104 mission specialist, participates in one of three STS-104 space walks while holding on to the end effector of the Canadarm on the Space Shuttle Atlantis. Gernhardt was joined on the extravehicular activity (EVA) by astronaut James F. Reilly (out of frame). The major objective of the mission was to install and activate the Joint Airlock, which completed the second phase of construction on the International Space Station (ISS). The airlock accommodates both United States and Russian space suits and was designed and built at the Marshall Space Flight Center by the Boeing Company.

S134-E-007321 (18 May 2011) --- The handoff between space shuttle Endeavour?s robotic Canadarm and the International Space Station?s Canadarm2 of the Express Logistics Carrier-3 (ELC-3) is featured in this image photographed by an STS-134 crew member on the station. The ELC-3 was later installed on the left side of the station?s truss structure. ELC-3 holds spare hardware for future station use, including an ammonia tank, a high pressure gas tank, a cargo transport container, two S-band antenna assemblies and a spare arm for DEXTRE, the Special Purpose Dexterous Manipulator. Photo credit: NASA

S134-E-006505 (17 May 2011) --- The Orbiter Boom Sensor System (OBSS), pictured on the second flight day of STS-134, on left side of this photo showing Endeavour's vertical stabilizer and cargo bay, is a 50-foot boom carried onboard each of NASA's space shuttles. The boom can be grappled by the Canadarm and serves as an extension of the arm, doubling its length to a combined total of 100 feet (30 meters). At the far end of the boom is an instrumentation package of cameras and lasers used to scan the leading edges of the wings, the nose cap, and the crew compartment after each lift-off and before each landing. Photo credit: NASA

S134-E-007314 (18 May 2011) --- The handoff between space shuttle Endeavour?s robotic Canadarm and the International Space Station?s Canadarm2 of the Express Logistics Carrier-3 (ELC-3) is featured in this image photographed by an STS-134 crew member on the station. The ELC-3 was later installed on the left side of the station?s truss structure. ELC-3 holds spare hardware for future station use, including an ammonia tank, a high pressure gas tank, a cargo transport container, two S-band antenna assemblies and a spare arm for DEXTRE, the Special Purpose Dexterous Manipulator. Photo credit: NASA
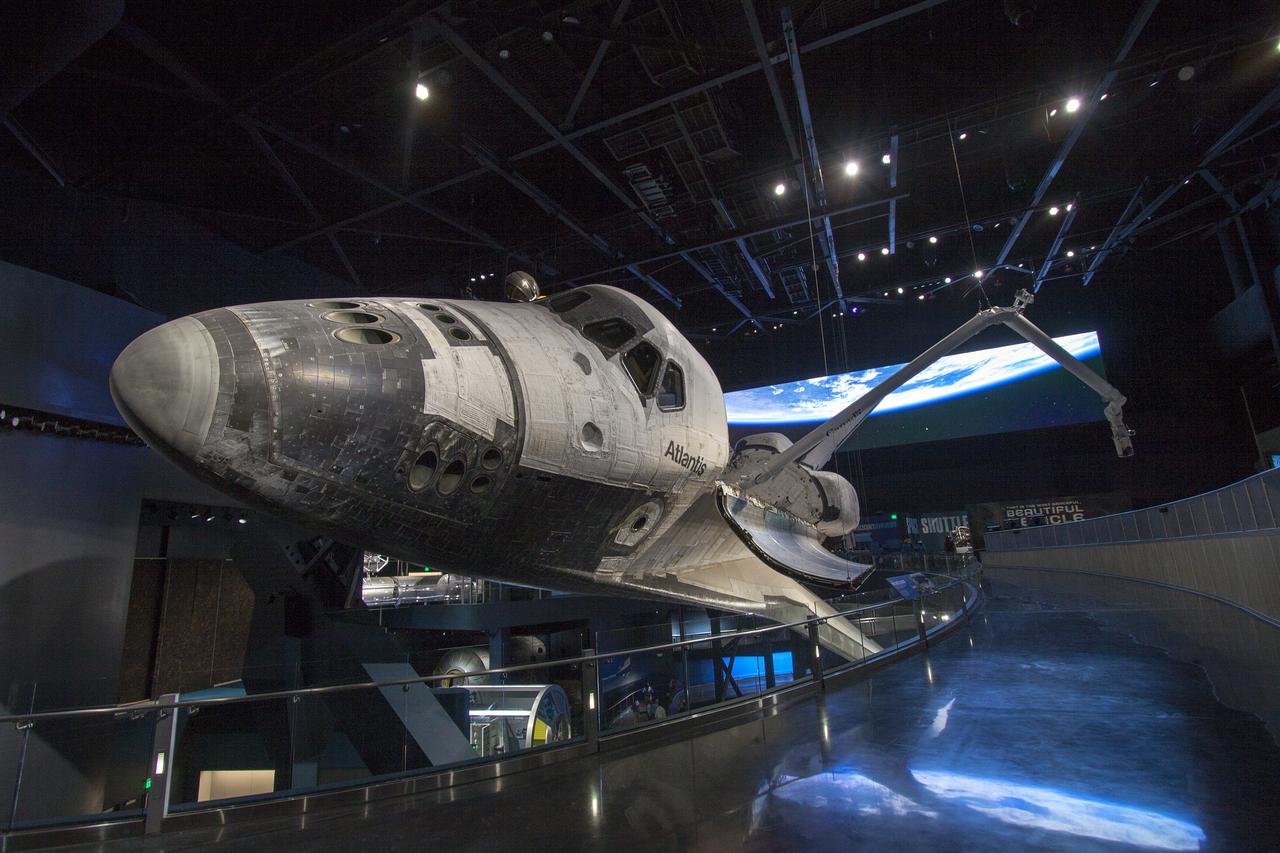
CAPE CANAVERAL, Fla. -- At the Kennedy Space Center Visitor Complex in Florida, construction crews are completing final preparations for the opening of the "Space Shuttle Atlantis" facility. The spacecraft will be the centerpiece of a 90,000-square-foot building in which visitors will see Atlantis as it appeared in space. The payload bay doors are opened and the shuttle's Canadarm remote manipulator system -- its robotic arm -- installed and extended. The new $100 million facility will include interactive exhibits that tell the story of the 30-year Space Shuttle Program and highlight the future of space exploration. The "Space Shuttle Atlantis" exhibit is scheduled to open June 29, 2013.Photo credit: NASA/ Jim Grossmann

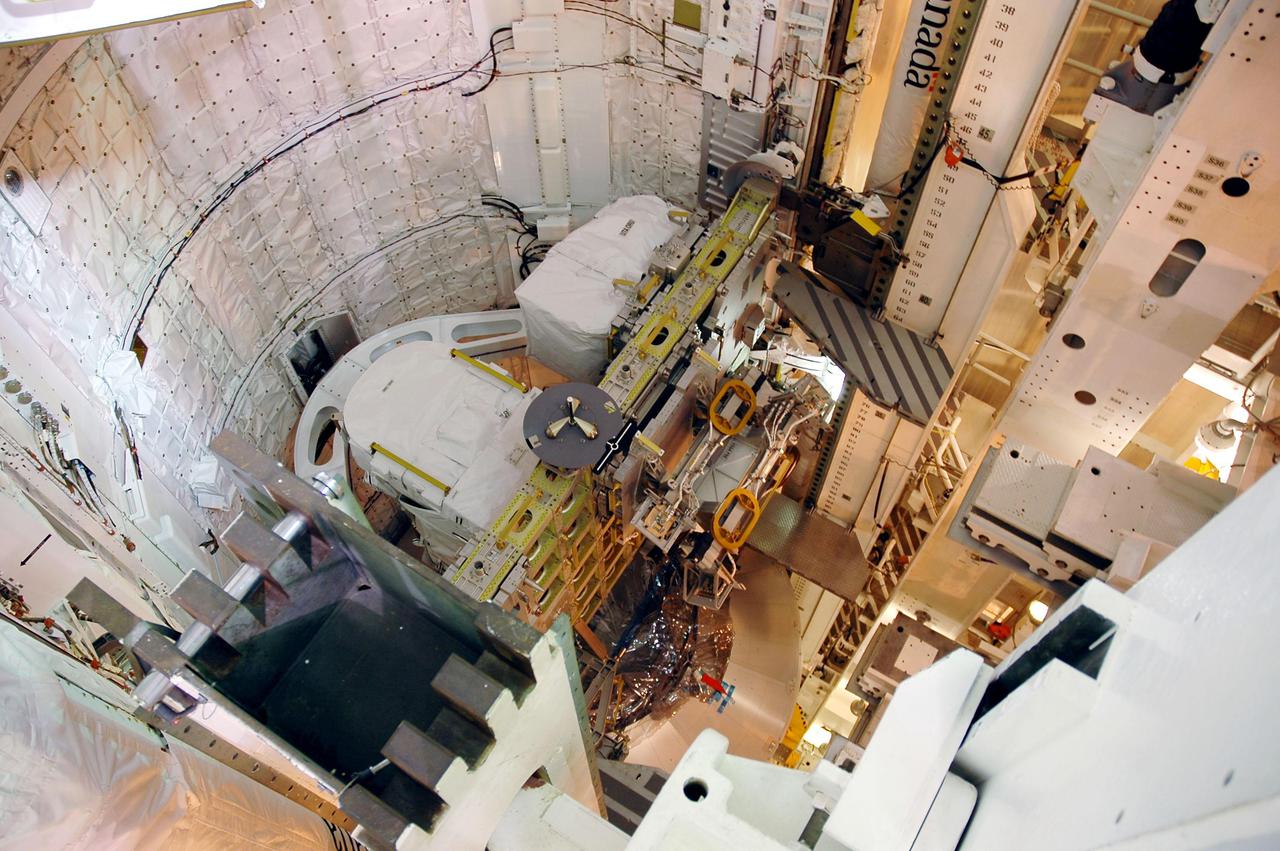
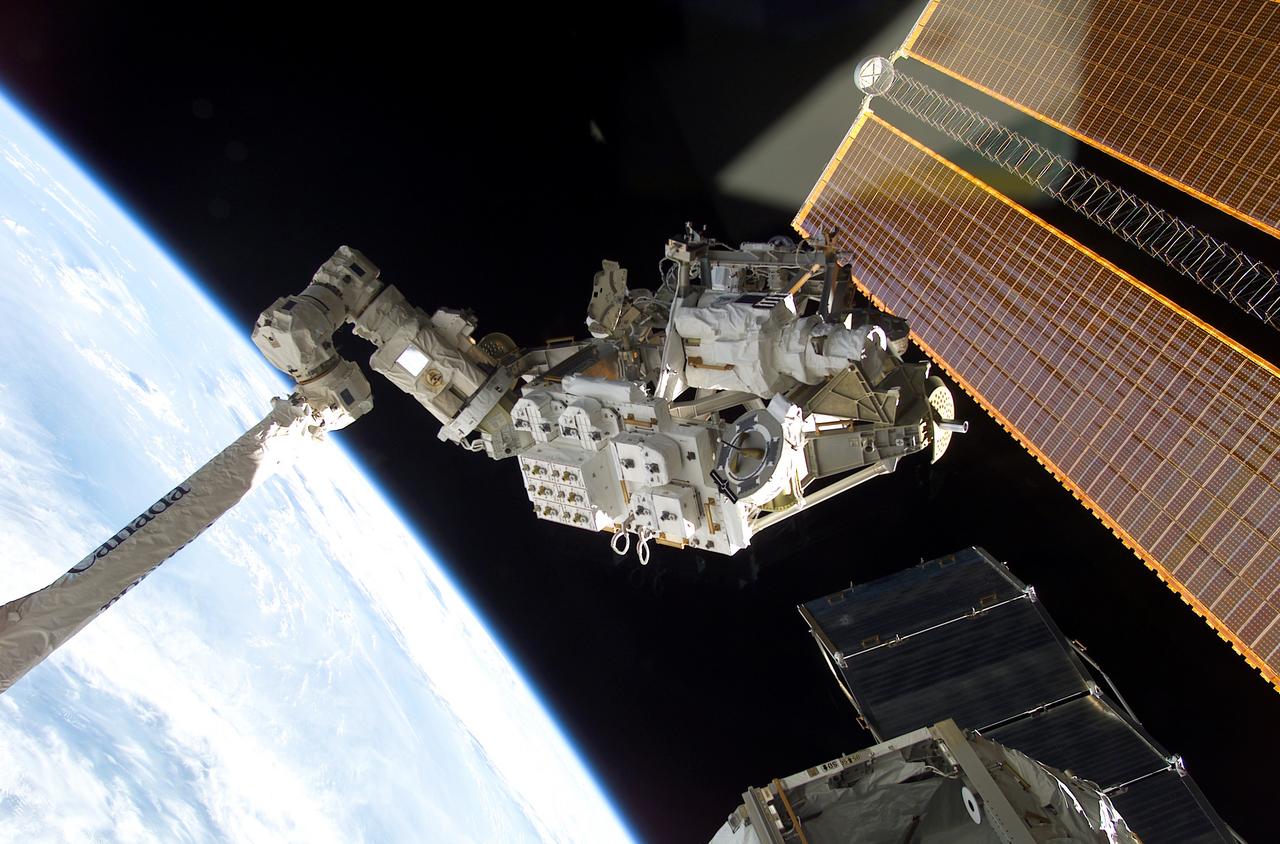
S134-E-007141 (18 May 2011) --- In the grasp of space shuttle Endeavour?s robotic Canadarm, the Express Logistics Carrier-3 (ELC-3) is transferred from Endeavour?s payload bay for hand off to the International Space Station?s Canadarm2 to be installed on the left side of the station?s truss structure. ELC-3 holds spare hardware for future station use, including an ammonia tank, a high pressure gas tank, a cargo transport container, two S-band antenna assemblies and a spare arm for DEXTRE, the Special Purpose Dexterous Manipulator. Photo credit: NASA

STS104-315-013 (12-24 July 2001) --- Holding onto the end effector of the Canadarm on the Space Shuttle Atlantis, astronaut Michael L. Gernhardt, STS-104 mission specialist, participates in one of three STS-104 space walks. The extravehicular activity (EVA) was designed to help wrap up the completion of work on the second phase of the International Space Station (ISS). Gernhardt was joined on the extravehicular activity (EVA) by astronaut James F. Reilly. The jutting peninsula in the background is Cape Kormakiti on the north central coast of Cyprus and the water body to the left of the cape is Morphu Bay.

KENNEDY SPACE CENTER, FLA. -- STS-111 Mission Specialist Philippe Perrin (CNES) steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

S126-E-011973 (26 Nov. 2008) --- The Canadian-built Orbiter Boom Sensor System (OBSS), in its parked position, and part of the International Space Station are featured in this image, photographed over the Blue Ridge Mountains of West Virginia and Tennessee by one of the Endeavour crew members on the eve of Thanksgiving. The OBSS, on the end of the Canadarm, awaits the final part of its STS-126 role when it will inspect the shuttle one more time, following separation of the orbiter from the space station in a couple of days. When that task is complete, it will be stowed across the payload bay from the robot arm.

KENNEDY SPACE CENTER, FLA. -- The remaining payload bay door begins to close. Visible is the Multi-Purpose Logistics Module Leonardo, last to be installed in Endeavour. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002.
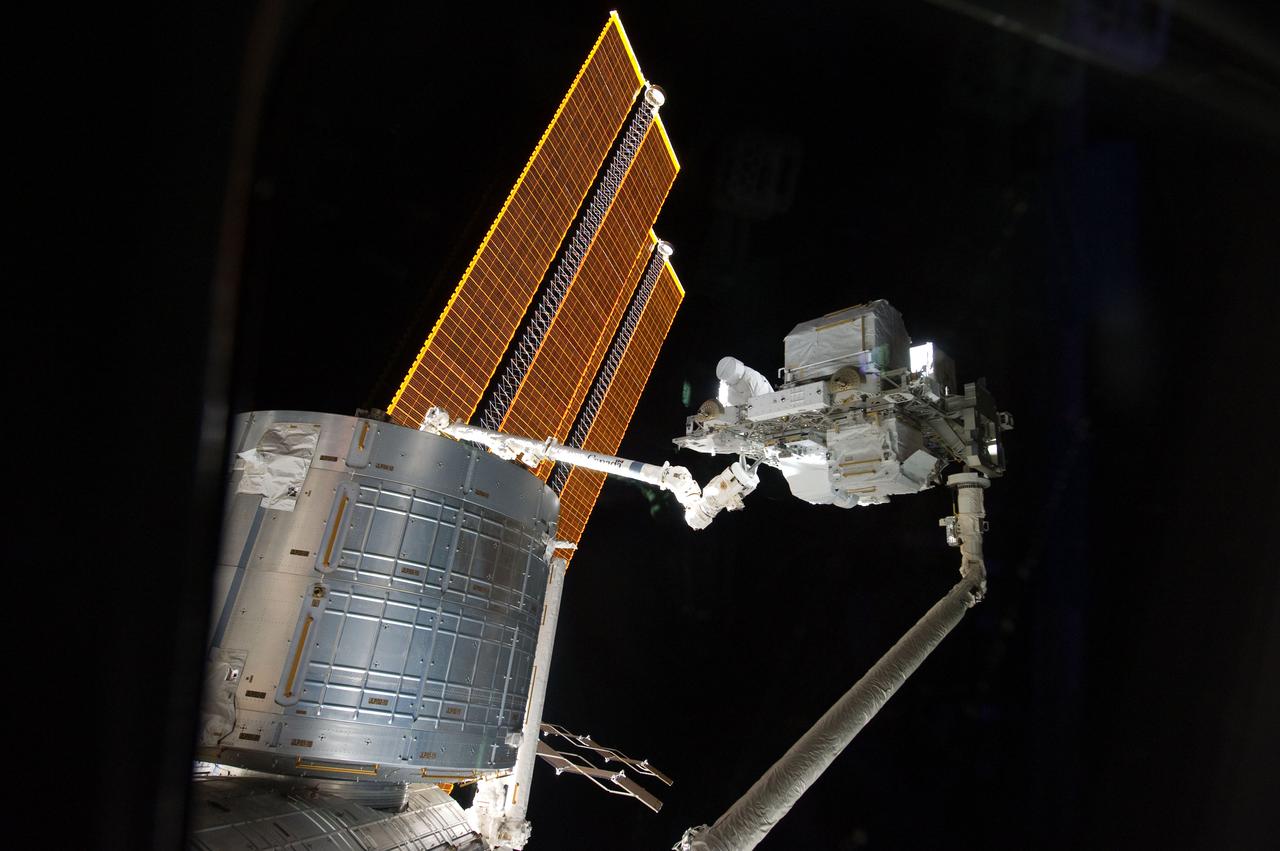
S134-E-007327 (18 May 2011) --- The handoff between space shuttle Endeavour?s robotic Canadarm and the International Space Station?s Canadarm2 of the Express Logistics Carrier-3 (ELC-3) is featured in this image photographed by an STS-134 crew member on the station. The ELC-3 was later installed on the left side of the station?s truss structure. ELC-3 holds spare hardware for future station use, including an ammonia tank, a high pressure gas tank, a cargo transport container, two S-band antenna assemblies and a spare arm for DEXTRE, the Special Purpose Dexterous Manipulator. Photo credit: NASA
KENNEDY SPACE CENTER, FLA. - In the Payload Changeout Room on Launch Pad 39B, the payloads for Return to Flight mission STS-114 are being transferred to Discovery’s payload bay. The payloads include a Control Moment Gyro, the Thermal Protection System Detailed Test Objective box, which is placed on the Lightweight Multi-Purpose Experiment Support Structure Carrier, the External Stowage Platform 2, and Multi-Purpose Logistics Module Raffaello. Already installed in the payload bay are the airlock, the Canadarm 2, or Shuttle arm, and the Orbiter Boom Sensor System. The launch window for mission STS-114 extends from July 13 to July 31.
KENNEDY SPACE CENTER, FLA. - With the SPACEHAB and Hitchhiker payloads already installed, Endeavour's payload bay is ready for installation of the Multi-Purpose Logistics Module Leonardo for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- In the Press Site auditorium, Canadian Space Agency President Dr. Marc Garneau participates in a media briefing following the launch scrub of Space Shuttle mission STS-111. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

Part of the Gateway External Robotics Systems (GERS) provided by CSA, Canadarm3 is a robotic system that will use cutting-edge software to perform Gateway tasks. The system will help maintain, repair and inspect Gateway, capture visiting vehicles, help astronauts during spacewalks, and enable science in Gateway’s lunar orbit.
Backdropped against the blackness of space and the Earth's horizon, the Mobile Remote Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Delivered by the STS-111 mission aboard the Space Shuttle Endeavour in June 2002, the MBS is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station, which is neccessary for future construction tasks. In addition, STS-111 delivered a new crew, Expedition Five, replacing Expedition Four after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the MBS to the Mobile Transporter on the S0 (S-zero) truss, the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

A convoy of specialized support vehicles follow the Space Shuttle Endeavour as it is towed up a taxiway at NASA's Dryden Flight Research Center on Edwards Air Force Base, California, after landing on May 1, 2001. The two largest vehicles trailing the shuttle provide electrical power and air conditioning to the shuttle's systems during post-flight recovery operations. The Endeavour had just completed mission STS-100, an almost 12-day mission to install the Canadarm 2 robotic arm and deliver some three tons of supplies and experiments to the International Space Station. The landing was the 48th shuttle landing at Edwards since shuttle flights began in 1981. After post-flight processing, the Endeavour was mounted atop one of NASA's modified Boeing 747 shuttle carrier aircraft and ferried back to the Kennedy Space Center in Florida on May 8, 2001.

KENNEDY SPACE CENTER, FLA. -- Expedition 5 cosmonaut Sergei Treschev (RSA) waves as he dons his launch and entry suit for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Treschev's first Shuttle flight. Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour.

KENNEDY SPACE CENTER, FLA. -- Space Shuttle Endeavour is poised for launch at Pad 39A after mission managers postponed today's launch of mission STS-111. Forecasters' predictions that weather would prohibit a launch attempt due to severe thunderstorms and rain showers within the vicinity of the launch pad were accurate as depicted by the dark clouds overhead. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch has been rescheduled for Monday, June 3, between 4 and 8 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- STS-111 Pilot Paul Lockhart arrives at KSC to prepare for launch. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Also on board will be Expedition 5, traveling to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - The Expedition 5 crew gets ready to depart KSC after several days of Terminal Countdown Demonstration Test activities. TCDT includes emergency egress training and a simulated launch countdown. Expedition 5 will travel to the International Space Station on mission STS-111 as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Mission STS-111 is known as Utilization Flight 2, carrying supplies and equipment in the Multi-Purpose Logistics Module Leonardo to the International Space Station. The payload also includes the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - Launch and entry suits hang in readiness for the STS-111 crew. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour

KENNEDY SPACE CENTER, FLA. - The Expedition 5 crew - Commander Valeri Korzun (left), Sergei Treschev (center) and Peggy Whitson (right) - are in the slidewire basket and ready to exit the Fixed Service Structure on Launch Pad 39A. They and the STS-111 crew are taking part in Terminal Countdown Demonstration Test activities, which include emergency egress training and a simulated launch countdown. Mission STS-111 is Utilization Flight 2, carrying equipment and supplies in the Multi-Purpose Logistics Module Leonardo to the International Space Station, plus the Mobile Base System (MBA) and an Orbital Replacement Unit. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, enabling Canadarm 2 to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. The Expedition 5 crew is traveling on Endeavour to replace the Expedition 4 crew on the Station. Launch of Endeavour is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - On Launch Pad 39A, the Expedition 5 crew practices making a hasty exit from the 195-foot level to the slidewire baskets in the event of an emergency. They and the STS-111 crew are taking part in Terminal Countdown Demonstration Test activities, which include emergency egress training and a simulated launch countdown. Mission STS-111 is Utilization Flight 2, carrying equipment and supplies in the Multi-Purpose Logistics Module Leonardo to the International Space Station, plus the Mobile Base System (MBA) and an Orbital Replacement Unit. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, enabling Canadarm 2 to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. The Expedition 5 crew is traveling on Endeavour to replace the Expedition 4 crew on the Station. Launch of Endeavour is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Expedition 5 crew members Commander Valeri Korzun, cosmonaut Sergei Treschev and astronaut Peggy Whitson get together after landing at the Shuttle Landing Facility to prepare for launch on mission STS-111. Korzun and Treschev are with the Russian Space Agency. Expedition 5 will travel to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - This closeup of Space Shuttle Endeavour shows the cockpit windows just above the name. Extending to the side is the environmental chamber known as the White Room, at the end of the orbiter access arm. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled for 7:44 p.m. EDT, May 30, 2002

ISS006-E-21378 (18 January 2003) --- A portion of the Canadarm2, or Space Station Remote Manipulator System (SSRMS), was photographed by one of the Expedition 6 crewmembers onboard the International Space Station (ISS). Just above Canadarm2’s elbow are the Pleiades, also known as the Seven Sisters. These seven stars, arranged like a little dipper, are just the brightest members of a cluster of more than 3000 stars lying 400 light years from Earth. Between the robotic arm and the Pleiades is Earth itself. Below, the cloudy landscape is lit by a nearly-full Moon (out of frame). Above, the edge of Earth’s atmosphere is defined by a layer of glowing air—a brownish-yellow band of light stretching all the way across the image. And finally, just under Canadarm’s elbow, is a streak of green—the Aurora Borealis, also known as “northern lights”.

KENNEDY SPACE CENTER, FLA. - After the STS-111 crew's arrival at KSC, Commander Kenneth Cockrell speaks to the media about the coming launch. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Also on board will be Expedition 5, traveling to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - At the KSC Shuttle Landing Facility, STS-111 Mission Specialist Philippe Perrin, with the French Space Agency, waits for the rest of the crew before departing for Crew Quarters. The crew has arrived to prepare for launch. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Also on board will be Expedition 5, traveling to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- The STS-111 crew and Expedition 5 walk eagerly to the Astrovan that will take them to Launch Pad 39A for a simulated countdown. From left are Mission Specialists Philippe Perrin and Franklin Chang-Diaz; the Expedition 5 crew, Sergei Treschev, Peggy Whitson and Valeri Korzun; Pilot Paul Lockhart; and Commander Kenneth Cockrell. The simulation is part of STS-111 Terminal Countdown Demonstration Test activities for the crew and Expedition 5. The payload on the mission to the International Space Station includes the Mobile Base System (MBS), an Orbital Replacement Unit and Multi-Purpose Logistics Module Leonardo. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, enabling Canadarm 2 to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. The Expedition 5 crew is traveling on Endeavour to replace the Expedition 4 crew on the Station. Launch of Endeavour is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Space Shuttle Endeavour sits poised for launch at Pad 39A after mission managers postponed today's launch of mission STS-111. Forecasters' predictions that weather would prohibit a launch attempt due to severe thunderstorms and rain showers within the vicinity of the launch pad were accurate as depicted by the rainwater on the pavement in the foreground. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch has been rescheduled for Monday, June 3, between 4 and 8 p.m. EDT

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Franklin Chang-Diaz (right) rests after practicing a maneuver on the replacement pitch roll joint for the SSRMS (Canadarm 2). The joint will be installed during the mission to the International Space Station. Part of the payload on mission STS-111 is the Mobile Base System (MBS), which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Philippe Perrin, with the French Space Agency, smiles on his arrival at KSC aboard a T-38 jet aircraft to prepare for launch. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Also on board will be Expedition 5, traveling to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- STS-111 Mission Specialist Franklin Chang-Diaz is happy to be returning to KSC to prepare for launch. Mission STS-111, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, and a replacement wrist/roll joint for Canadarm 2. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Also on board will be Expedition 5, traveling to the Station on Space Shuttle Endeavour as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - In the Payload Changeout Room on Launch Pad 39B, access stairs are rolled into place next to the Payload Ground Handling Mechanism, which is used to transfer the payloads into the orbiter. The payloads for Return to Flight mission STS-114 that are being transferred to Discovery’s payload bay include a Control Moment Gyro, the Thermal Protection System Detailed Test Objective box, which is placed on the Lightweight Multi-Purpose Experiment Support Structure Carrier, External Stowage Platform 2 and Multi-Purpose Logistics Module Raffaello. Already installed in the payload bay are the airlock, the Canadarm 2, or Shuttle arm, and the Orbiter Boom Sensor System. The launch window for mission STS-114 extends from July 13 to July 31.