
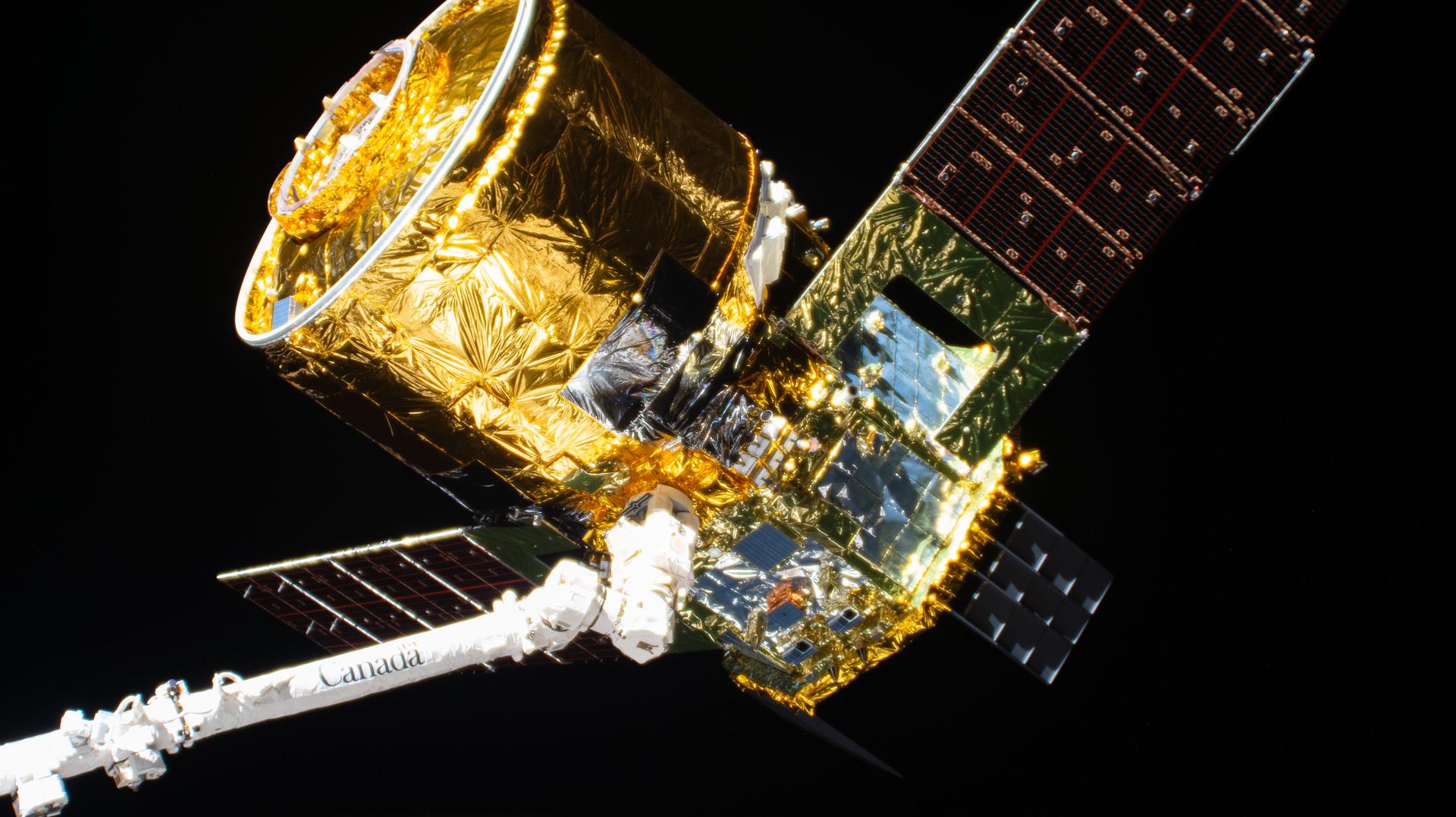
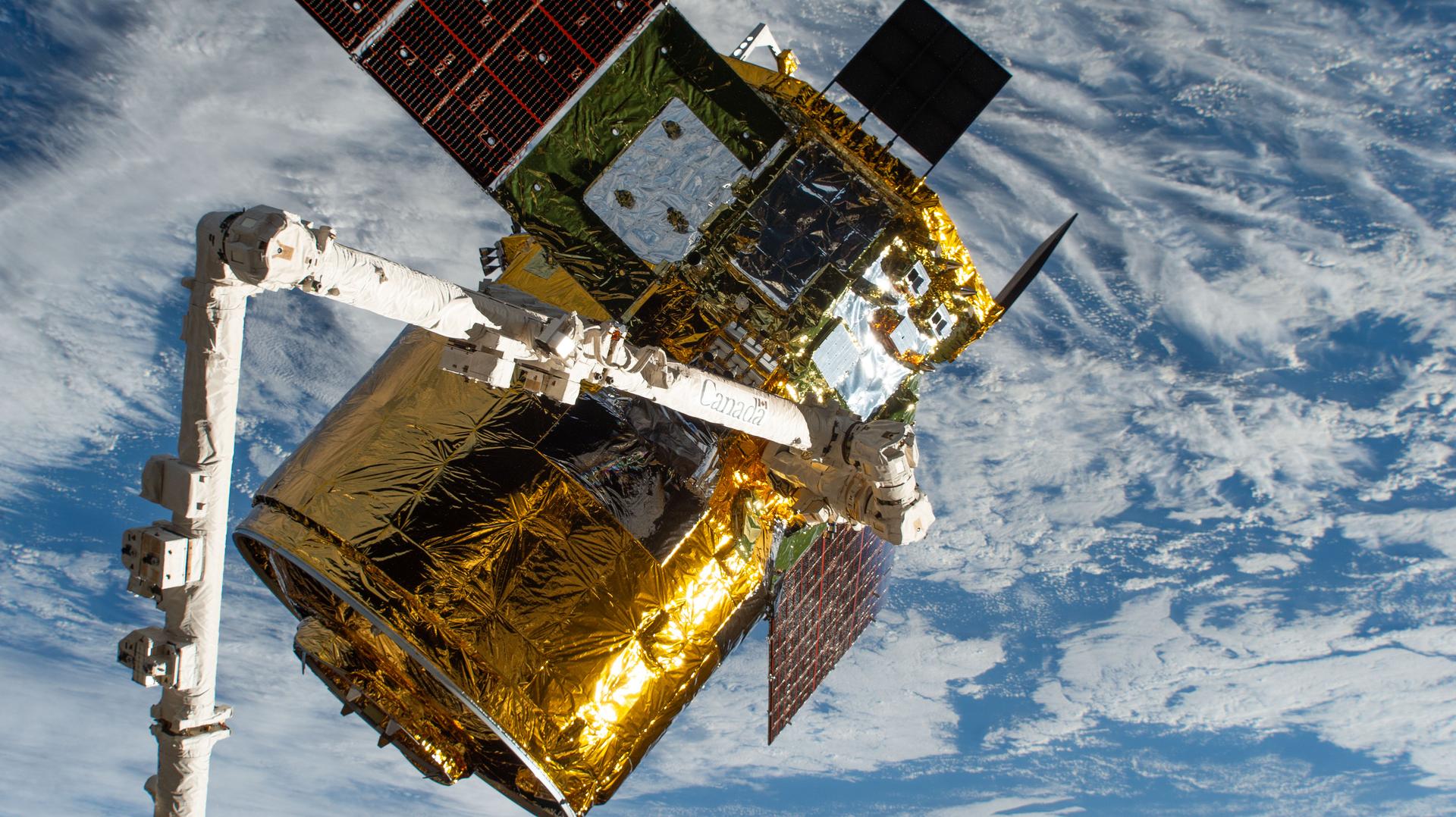
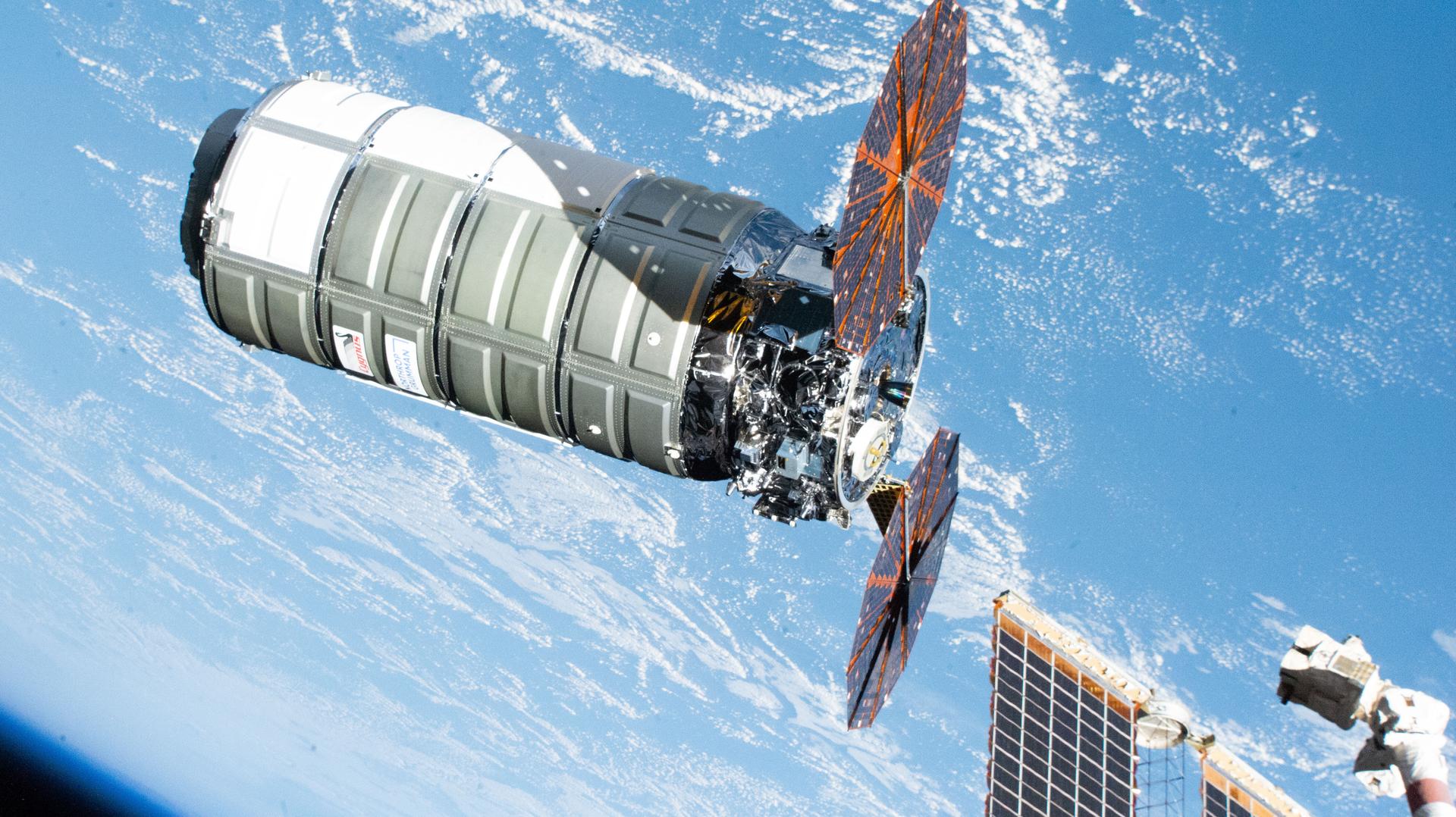
iss071e418235 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, with its prominent cymbal-shaped UltraFlex solar arrays, is pictured in the grips of the Canadarm2 robotic arm shortly after its capture was commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm.

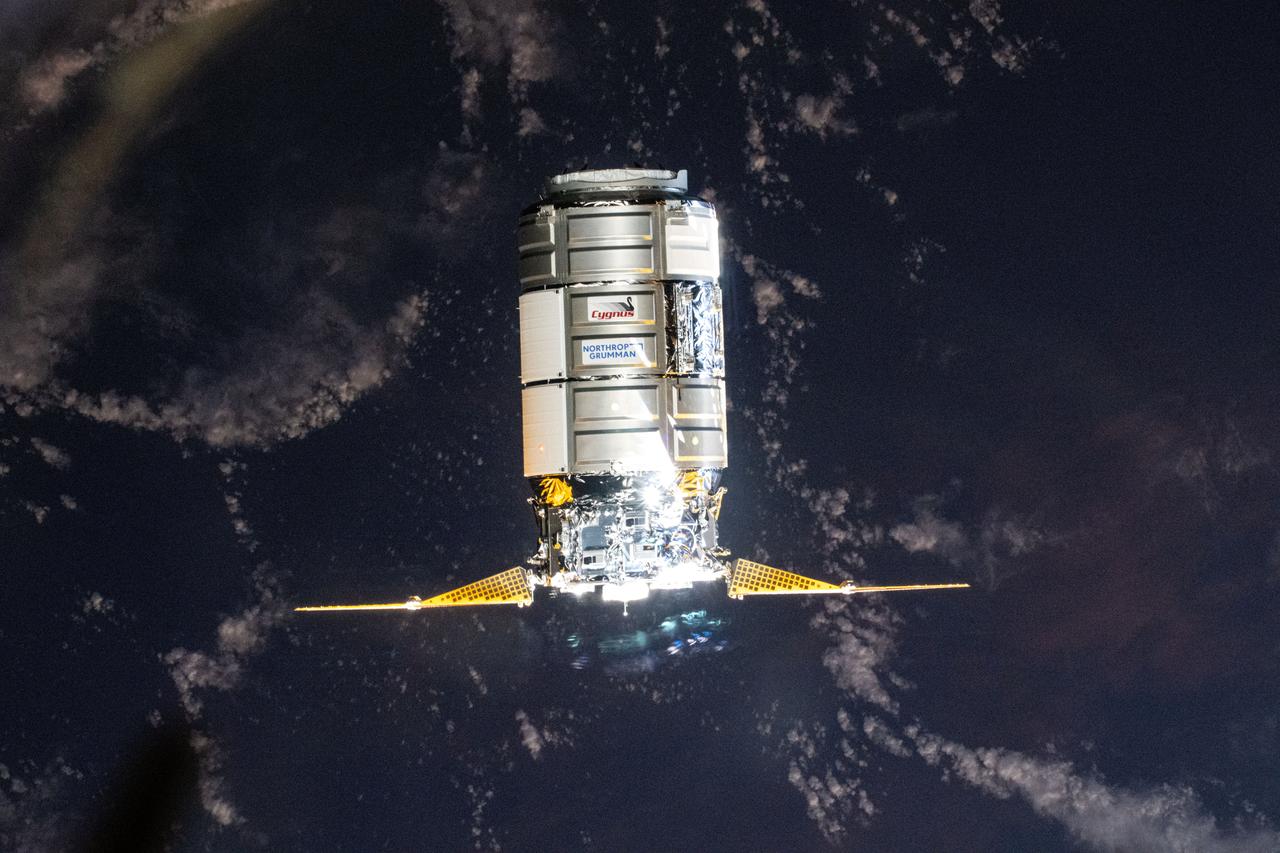
iss071e418233 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, with its prominent cymbal-shaped UltraFlex solar arrays, is pictured awaiting its capture by the Canadarm2 robotic arm commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm.

iss071e417237 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, with its prominent cymbal-shaped UltraFlex solar arrays, is pictured in the grips of the Canadarm2 robotic arm shortly after its capture was commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm. The International Space Station was orbiting 262 miles above the Mediterranean Sea at the time of this photograph.

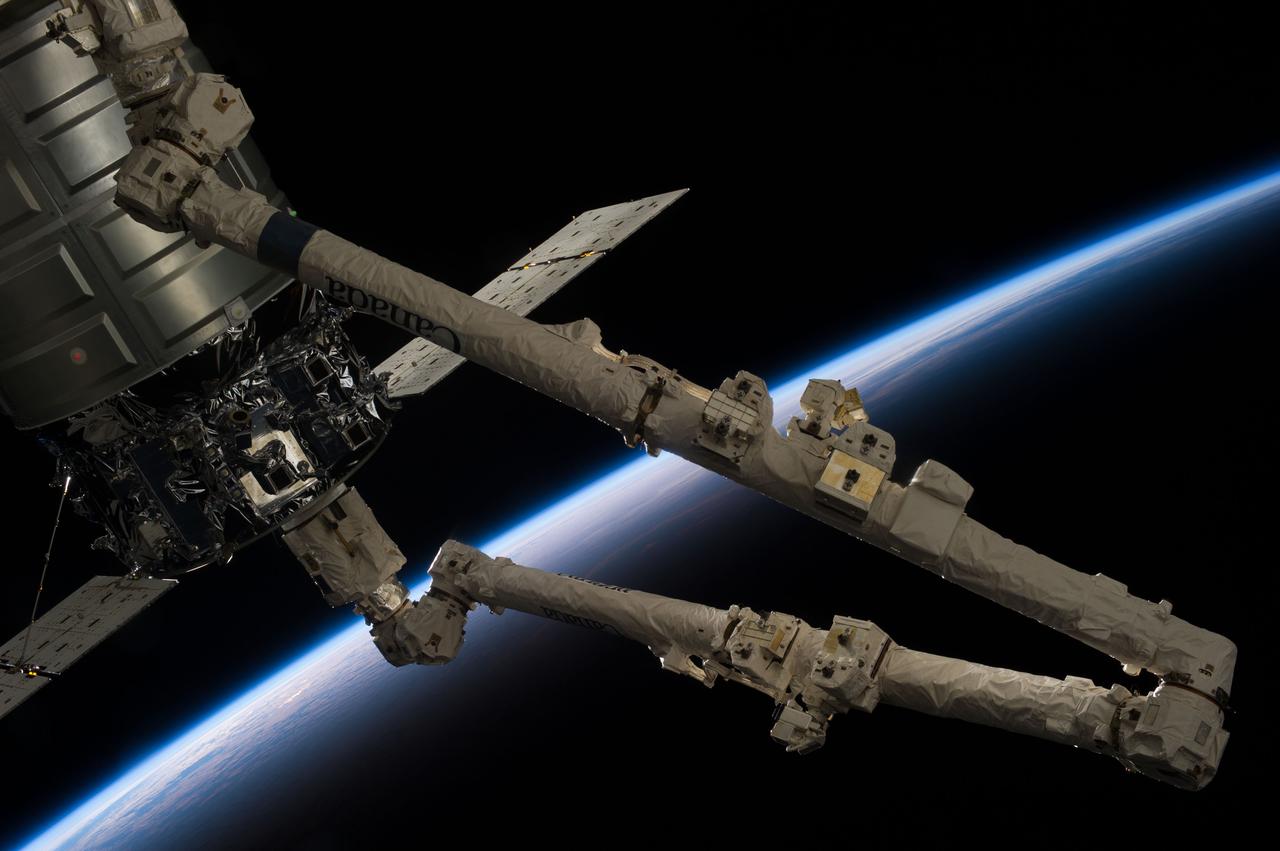
iss071e361950 (July 15, 2024) --- The International Space Station's 57.7-foot-long Canadarm2 robotic arm crosses the foreground as the orbital outpost soared 265 miles above the Mozambique Channel south of the African island nation of Madagascar.

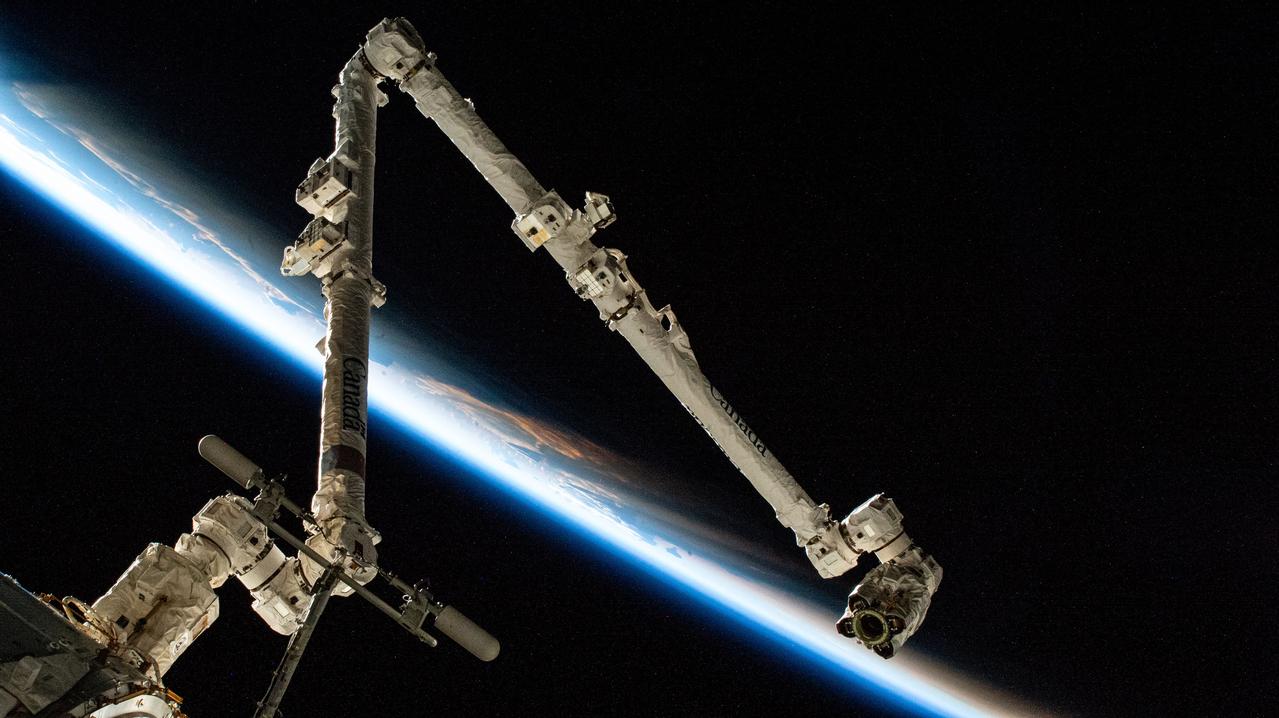
iss071e403651 (July 21, 2024) --- The 57.7-foot-long Canadarm2 robotic arm extends from the International Space Station's Harmony module as the orbital outpost soared 261 miles above the coast of Peru. Partially obscured in the top background, is the Boeing Starliner spacecraft docked to Harmony's forward port.

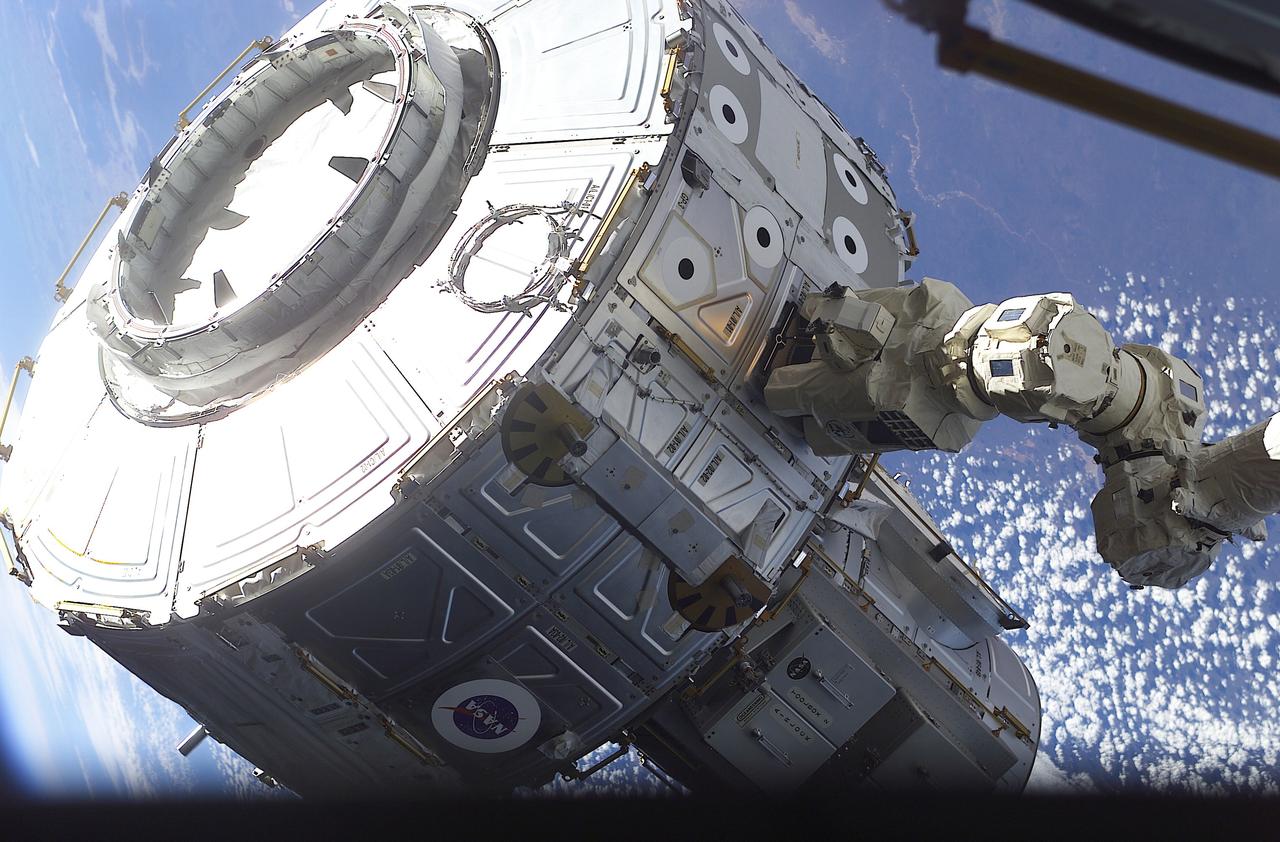
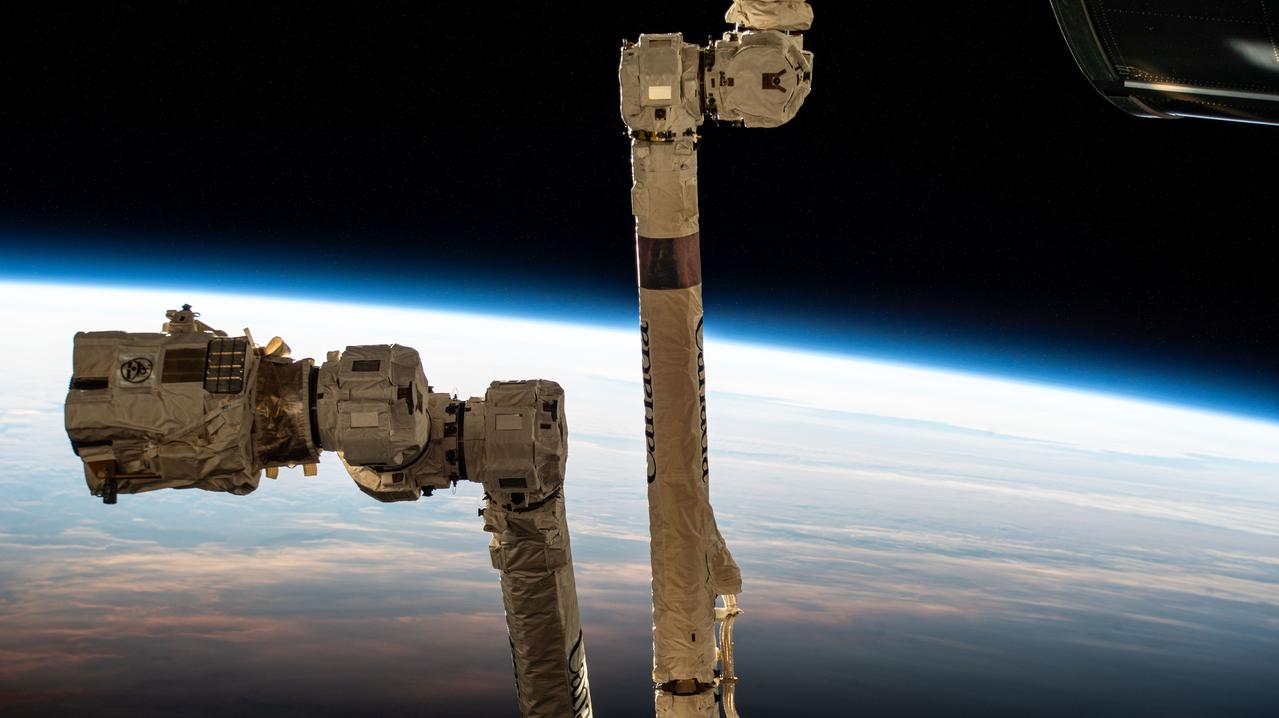
iss071e384199 (July 17, 2024) --- The Canadarm2 robotic arm's latching end effector, or LEE, is used to grapple fixtures on the International Space Station, as well as capture the approaching Cygnus cargo craft from Northrop Grumman and attach it to the Unity module for cargo transfer operations. 256 miles below the outpost is the Mediterranean coast of Libya and Egypt and the Greek island of Crete.

iss071e416851 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, carrying 8,200 pounds of science and supplies, approaches the International Space Station for a capture with the Canadarm2 robotic arm commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm.

iss071e418230 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, carrying 8,200 pounds of science and supplies, approaches the International Space Station for a capture with the Canadarm2 robotic arm commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm.
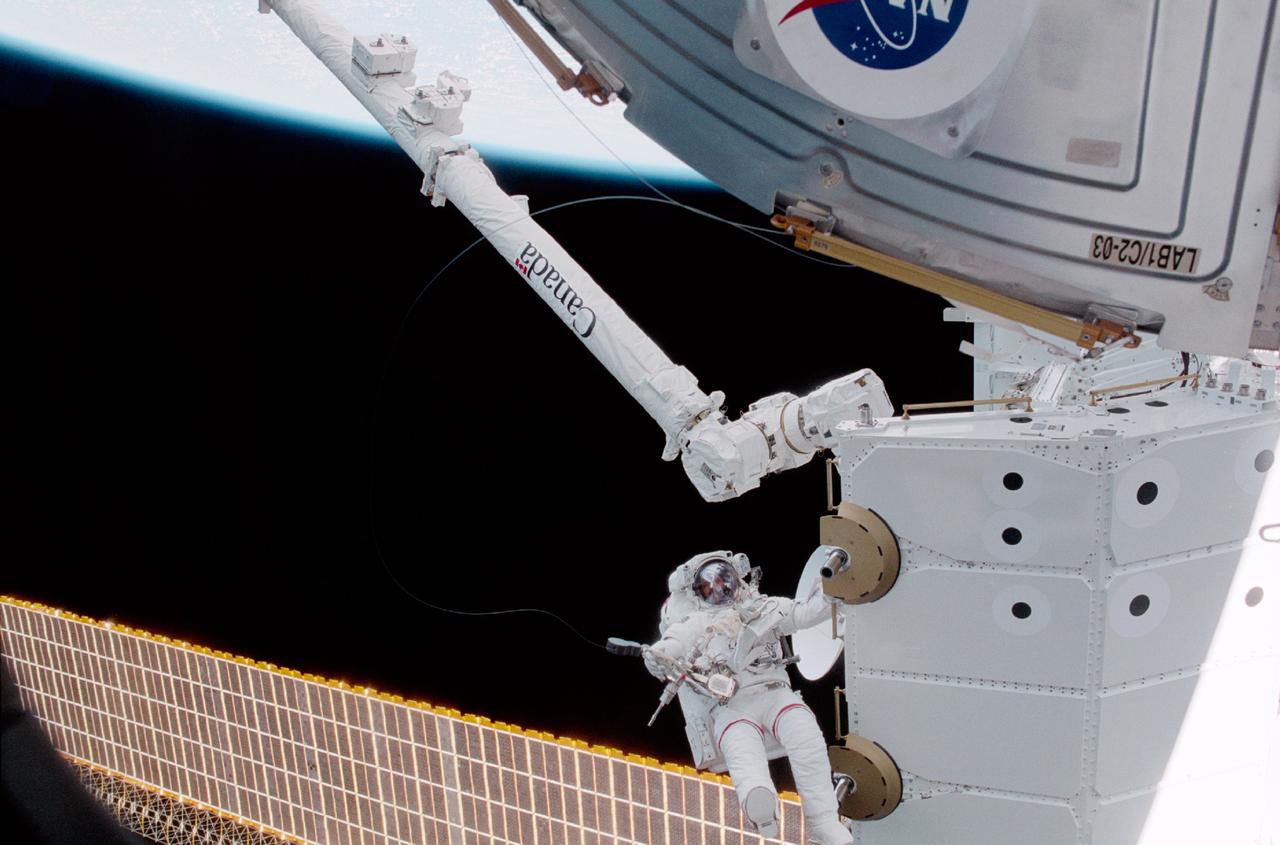
The main objective of the STS-100 mission, the sixth International Space Station (ISS) assembly flight, was the delivery and installation of the Canadian-built Space Station Remote Manipulator System (SSRMS), or Canadarm2. In this photograph, astronaut Chris A. Hadfield, mission specialist representing the Canadian Space Agency (CSA), is seen near the Canadarm2, as the new tool for the ISS grasps the space lab pallet. STS-100 launched April 19, 2001 aboard the Space Shuttle Orbiter Endeavour for an 11 day mission.

View of the first Cygnus commercial cargo spacecraft built by Orbital Sciences Corp attached to the end of the robotic arm (AKA Canadarm2) and docked the Node 2 module of the ISS. Per Twitter message: Sunrise on #Cygnus and #Canadarm2.

iss071e416716 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, carrying 8,200 pounds of science and supplies, approaches the International Space Station for a capture with the Canadarm2 robotic arm commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm. The orbital outpost was soaring 262 miles above central Iran at the time of this photograph.
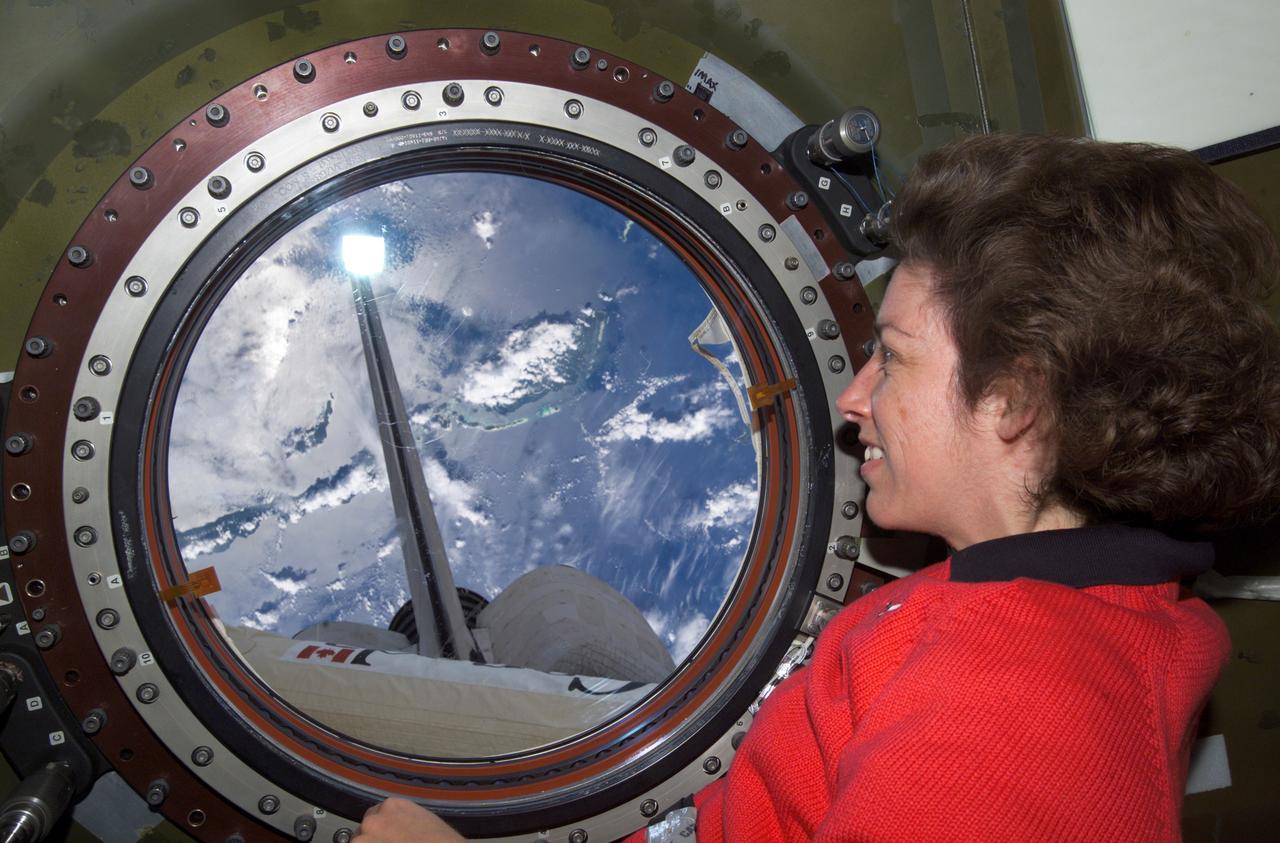
Astronaut Ellen Ochoa, STS-110 mission specialist, looks through the window of the Destiny laboratory on the International Space Station (ISS) as she views portions of the Space Shuttle Atlantis and the Canadarm2. It was during the STS-110 mission that the Canadian-developed ISS robotic arm was used to maneuver spacewalkers around the station for the first time. The STS-110 mission, carried by the Space Shuttle Orbiter Atlantis, was launched on April 8, 2002.
iss071e418212 (Aug. 6, 2024) --- Northrop Grumman's Cygnus cargo craft, carrying 8,200 pounds of science and supplies, approaches the International Space Station for a capture with the Canadarm2 robotic arm commanded by Expedition 71 Flight Engineer Matthew Dominick of NASA. The maneuver marked the 50th free-flying capture for the Canadarm2 robotic arm.

The main objective of the STS-100 mission, the sixth International Space Station (ISS) assembly flight, was the delivery and installation of the Canadian-built Space Station Remote Manipulator System (SSRMS), or Canadarm2. In this photograph, astronaut Scott E. Parazynski, mission specialist, works with cables associated with the robotic arm during one of two days of extravehicular activity (EVA). Both space walks were shared with Chris A. Hadfield, mission specialist representing the Canadian Space Agency (CSA), who is visible in the helmet visor of Parazynski. STS-100 launched April 19, 2001 aboard the Space Shuttle Orbiter Endeavour for an 11 day mission.

iss069e004909 (April 21, 2023) --- The Cygnus space freighter from Northrop Grumman is pictured in the grips of the Canadarm2 robotic arm as the International Space Station orbited 258 miles above the Arabian Sea coast of India.

iss069e004821 (April 21, 2023) --- The Cygnus space freighter from Northrop Grumman is poised for release from the Canadarm2 robotic arm as the International Space Station orbited 262 miles above the north Atlantic Ocean.

iss069e004825 (April 21, 2023) --- The Cygnus space freighter from Northrop Grumman is poised for release from the Canadarm2 robotic arm as the International Space Station orbited 263 miles above the Atlantic Ocean off the coast of Ireland.

iss058e000081 (Dec. 22, 2018) --- The SpaceX Dragon cargo craft and the Canadarm2 robotic arm are pictured attached to the International Space Station as the orbital complex was 251 miles above the Atlantic Ocean about to fly over Morocco.

iss069e004895 (April 21, 2023) --- The Cygnus space freighter from Northrop Grumman is pictured in the grips of the Canadarm2 robotic arm as the International Space Station orbited 261 miles above the Caspian Sea off the coast of Turkmenistan.

The International Space Stations Remote Manipulator System (SSRMS) arm or Canadarm2 prepares to release the Orbital Sciences Cygnus commercial craft after three weeks at the space station.

A Canadian "handshake" in space occurred on April 28, 2001, as the Canadian-built space station robotic arm (Canadarm-2) transferred its launch cradle over to Endeavor's robotic arm. Marning the controls from the shuttle's aft flight deck, Canadian Mission Specialist Chris A. Hadfield of the Canadian Space Agency (CSA) was instrumental in the activity. The Spacelab pallet that carried the Canadarm2 robotic arm to the station was developed at the Marshall Space Flight Center (MSFC) in Huntsville, Alabama.

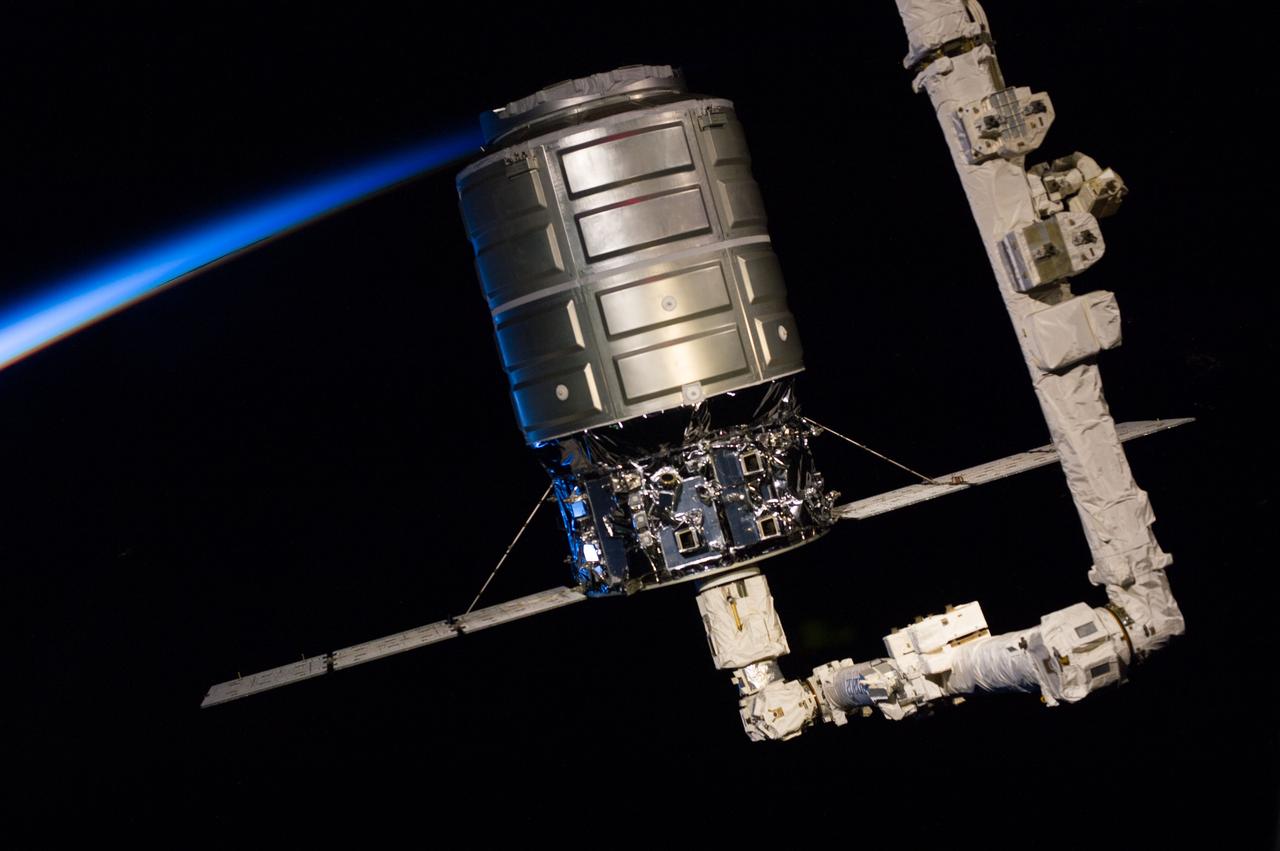
ISS037-E-006296 (5 Oct. 2013) --- Attached to the Harmony node, the first Cygnus commercial cargo spacecraft built by Orbital Sciences Corp., in the grasp of the Canadarm2, is photographed by an Expedition 37 crew member on the International Space Station. The two spacecraft converged at 7:01 a.m. EDT on Sept. 29, 2013. The thin line of Earth's atmosphere provides the backdrop for the scene.
iss073e0988464 (Oct. 29, 2025) --- The new HTV-X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency), carrying about 12,800 pounds of science, supplies, and hardware for the Expedition 73 crew, is pictured in the grip of the Canadarm2 robotic arm. JAXA astronaut and Expedition 73 Flight Engineer Kimiya Yui (not pictured) commanded Canadarm2 to gently reach out and capture HTV-X1 when the spacecraft reached a point about 10 meters away from the International Space Station.

S114-E-6642 (3 Aug. 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station’s Canadarm2, participates in the mission’s third session of extravehicular activity (EVA). The blackness of space and Earth’s horizon form the backdrop for the image.
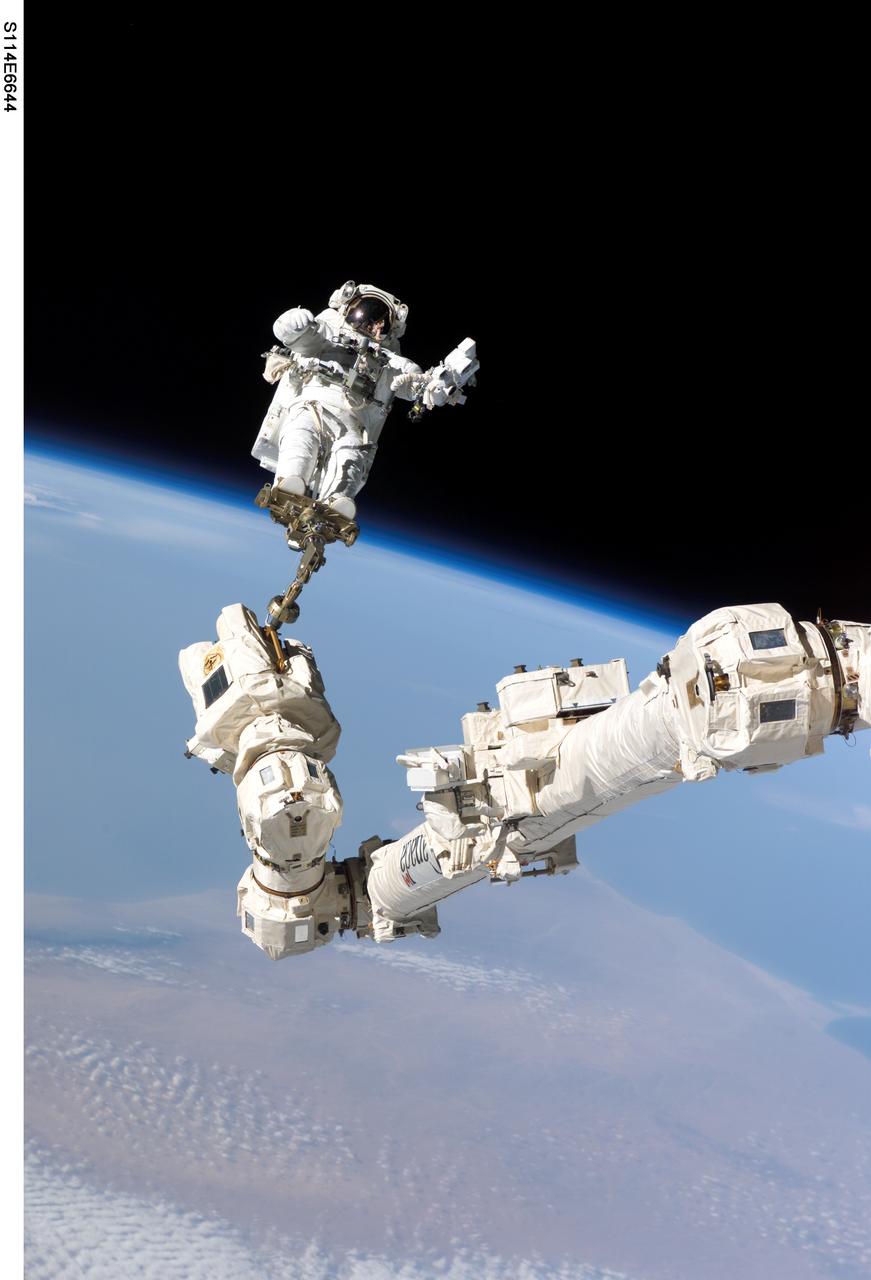
S114-E-6644 (3 August 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station;s Canadarm2, participates in the mission;s third session of extravehicular activity (EVA). The blackness of space and Earth;s horizon form the backdrop for the image.
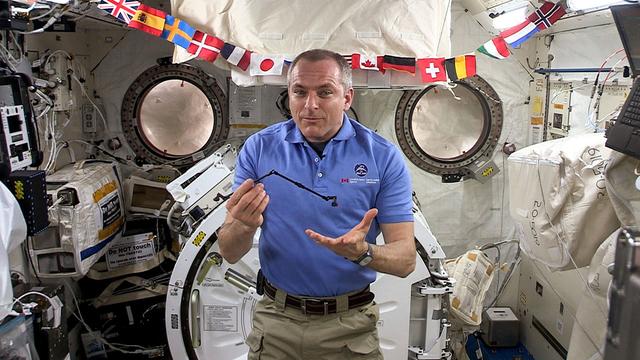
jsc2019e052832 (5/15/2019) — Canadian Space Agency (CSA) astronaut David Saint-Jacques speaks to students about space robotics, using a 1:50 scale model of Canadarm2 aboard the International Space Station (ISS). Image courtesy of: CSA

S114-E-6646 (3 August 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station;s Canadarm2, participates in the mission;s third session of extravehicular activity (EVA). The blackness of space and Earth;s horizon form the backdrop for the image.
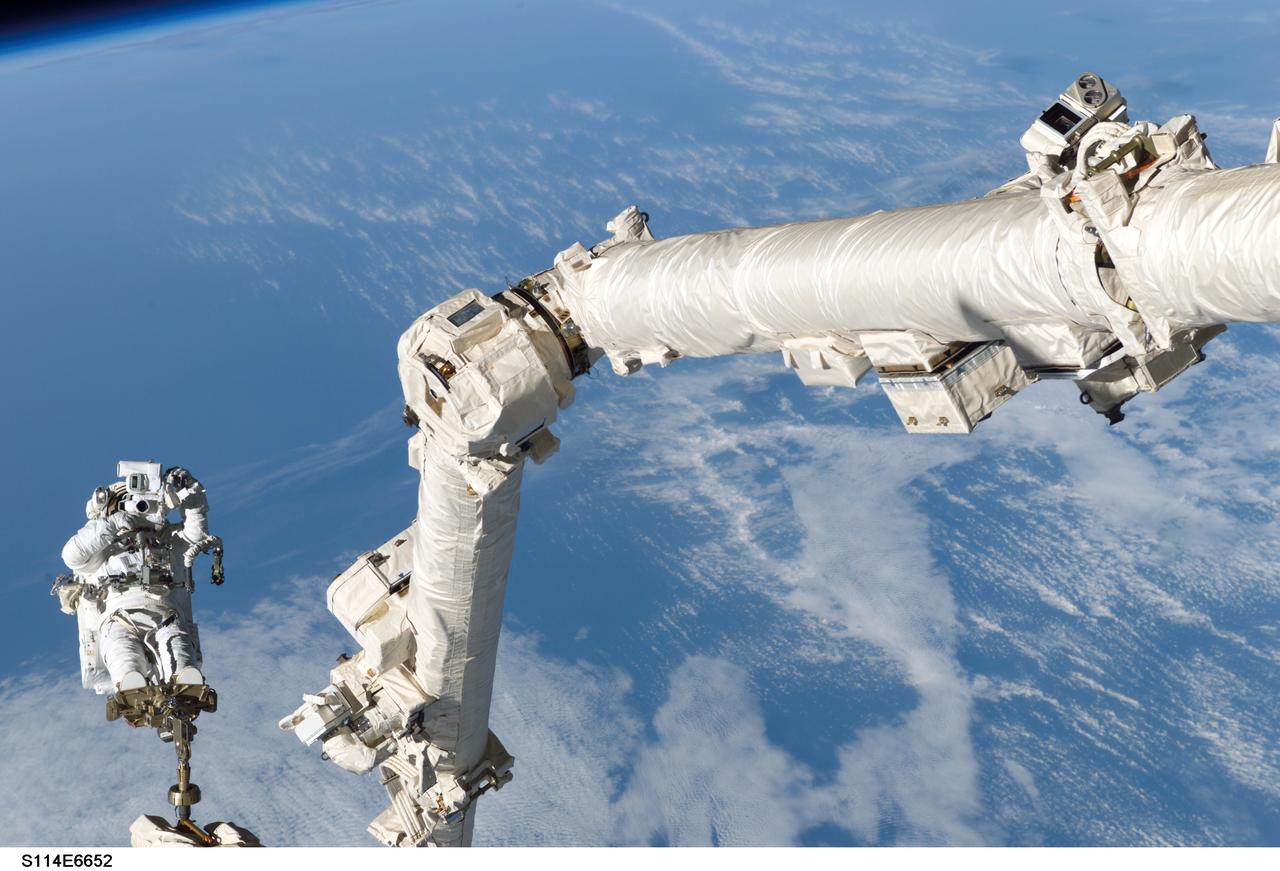
S114-E-6652 (3 August 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station;s Canadarm2, participates in the mission;s third session of extravehicular activity (EVA). A blue and white Earth forms the backdrop for the image.

S114-E-6647 (3 August 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station;s Canadarm2, participates in the mission;s third session of extravehicular activity (EVA). The blackness of space and Earth;s horizon form the backdrop for the image.
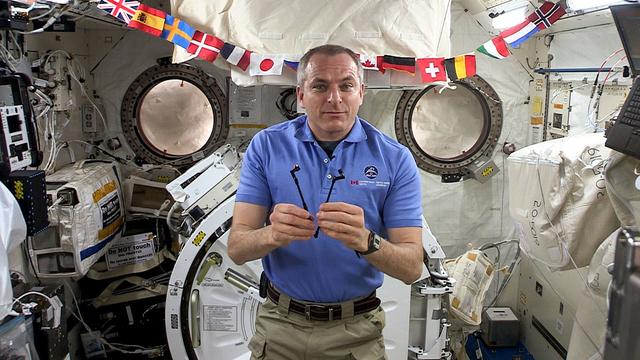
jsc2019e052833 (5/15/2019) — Canadian Space Agency (CSA) astronaut David Saint-Jacques speaks to students about space robotics, using a 1:50 scale model of Canadarm2 aboard the International Space Station (ISS). Image courtesy of: CSA
"View of the capture of the first Cygnus commercial cargo spacecraft built by Orbital Sciences Corp attached to the end of the robotic arm (AKA Canadarm2) on the International Space Station after the two spacecraft converged at 7:01 a.m. EDT on Sept. 29, 2013. " Also sent as Twitter message.
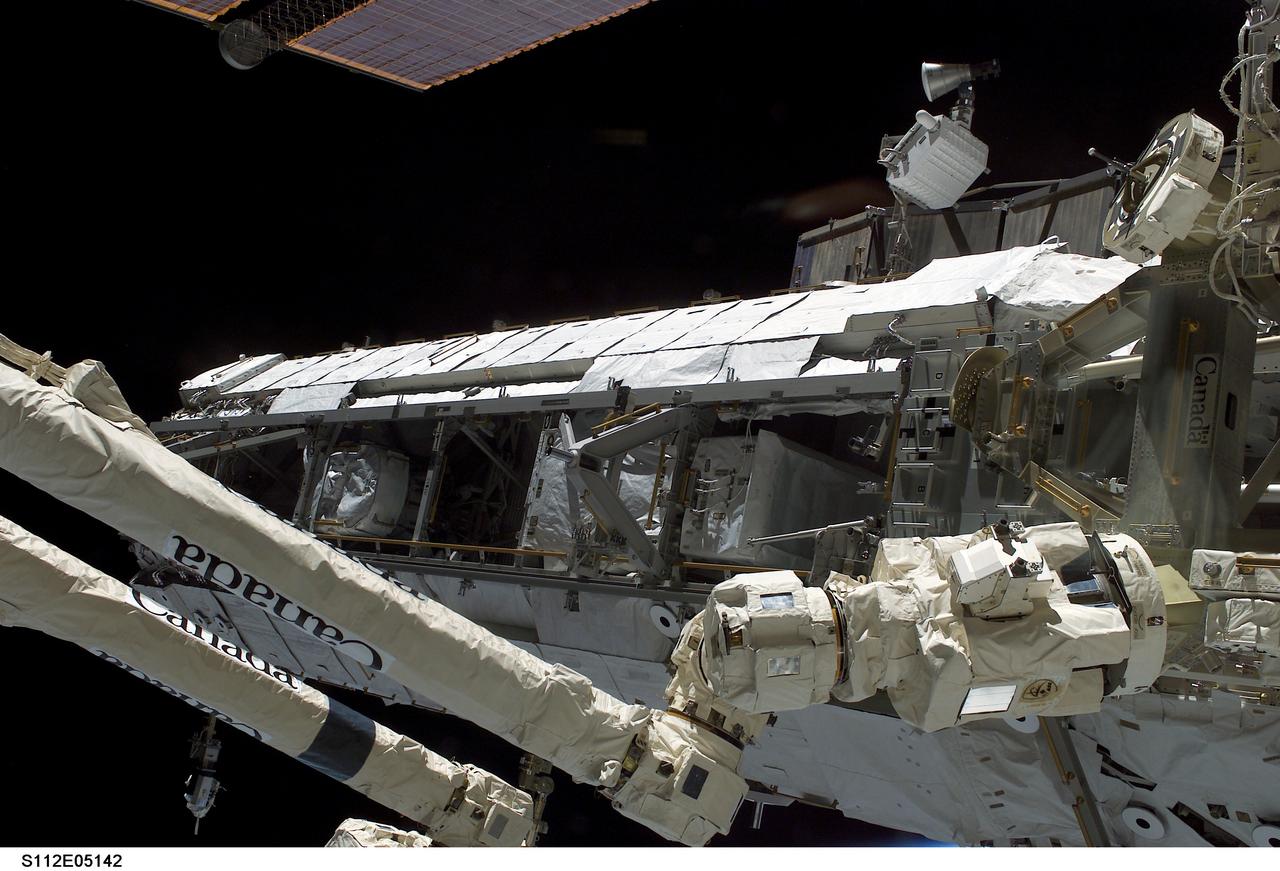
STS112-E-05142 (11 October 2002) --- A view of the Starboard One (S1) Truss, newly installed on the International Space Station (ISS). The station’s Canadarm2 is in the foreground.

iss058e005961 (Jan. 26, 2019) --- The International Space Station's Canadarm2 robotic arm and its Dextre robotic hand are seen as the orbital complex flew 252 miles above the Arabian Sea off the coast of India.

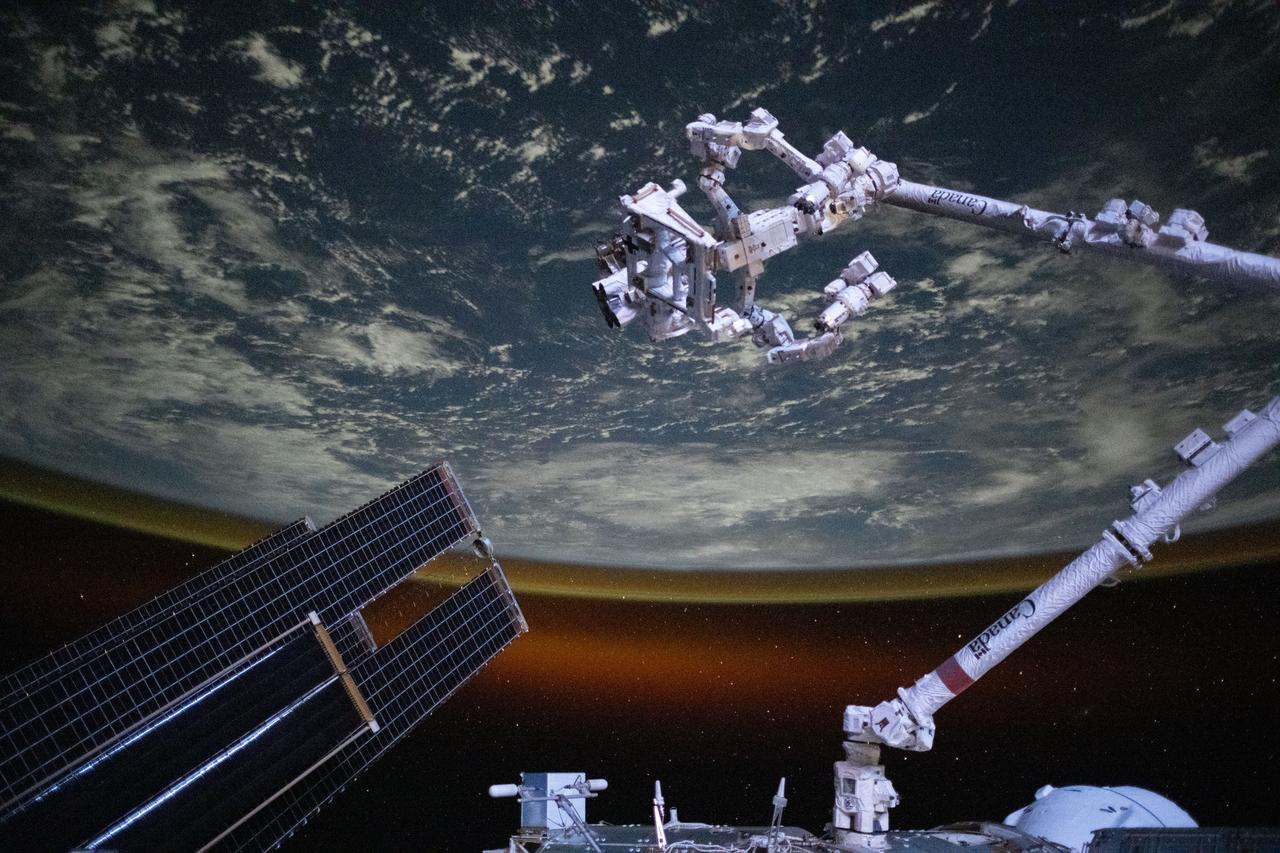
iss073e0490038 (July 22, 2025) --- The International Space Station's 57.7-foot-long robotic arm, also known as the Canadarm2, is partially silhouetted against an orbital sunrise 271 miles above the Indian Ocean south of Australia's island state of Tasmania. Attached to the Canadarm2's latching end effector is Dextre (top right), the fine-tuned robotic hand that performs precise maintenance capabilities on the orbital outpost, including removing and replacing small parts and performing photographic inspections, reducing the need for time-intensive spacewalks.

iss069e004683 (April 20, 2023) --- The Northrup Grumman Cygnus space freighter is pictured in the grip of the Canadarm2 robotic arm while attached to the Unity module's Earth-facing port. The International Space Station was soaring into an orbital sunset 266 miles above the Indian Ocean in between South Africa and Antarctica at the time of this photograph.

S104-E-5114 (16 July 2001) --- Janet L. Kavandi, STS-104 mission specialist, looks over the Canadarm2, Space Station Remote Manipulator System (SSRMS), control station in the Destiny laboratory during STS-104's visit to the International Space Station (ISS).
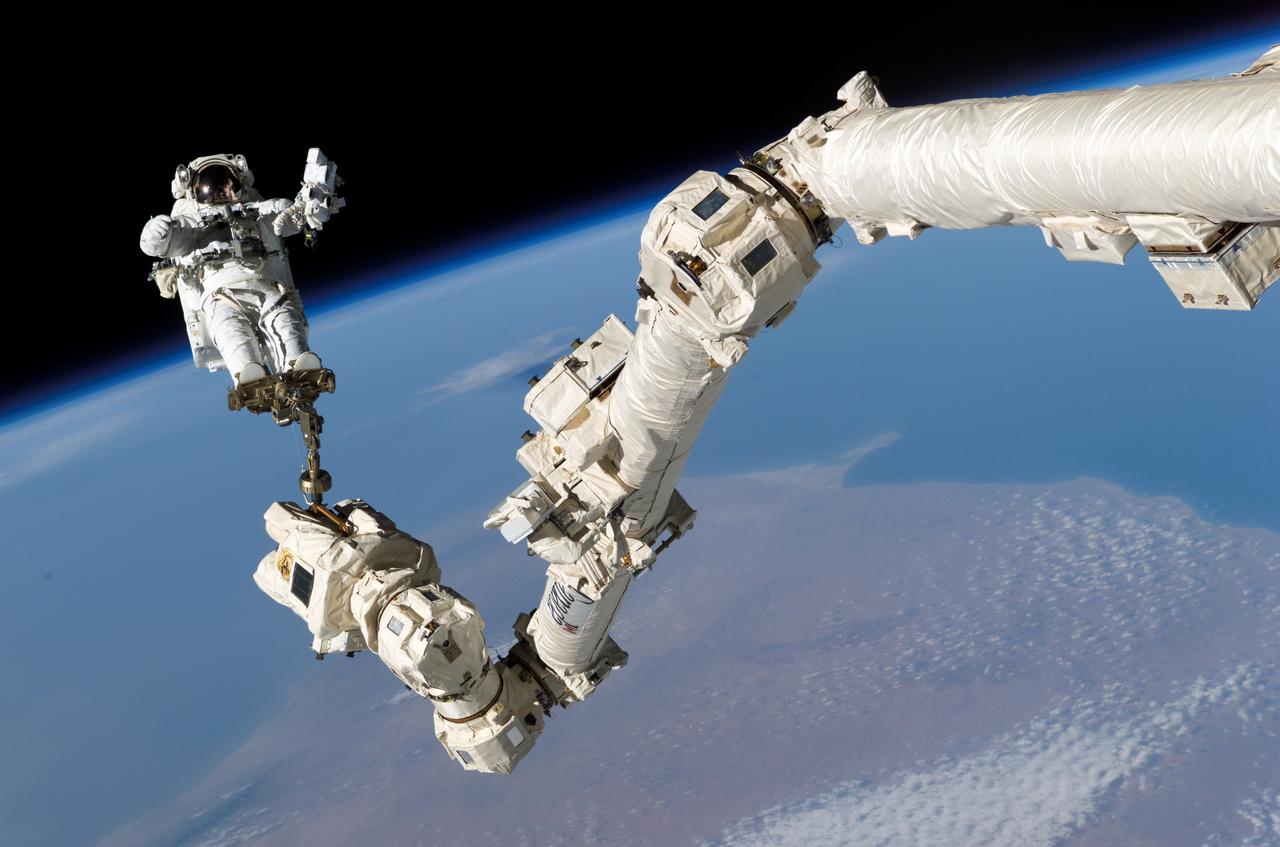
S114-E-6645 (3 August 2005) --- Discovery served as NASA's Return to Flight vehicle following the Columbia accident. Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the international space station’s Canadarm2, participates in the mission’s third session of extravehicular activity (EVA). The blackness of space and Earth’s horizon form the backdrop for the image. Photo credit: NASA or National Aeronautics and Space Administration

ISS037-E-003897 (29 Sept. 2013) --- The first Cygnus commercial cargo spacecraft built by Orbital Sciences Corp., in the grasp of the Canadarm2, is photographed by an Expedition 37 crew member on the International Space Station during rendezvous, capture and docking operations. The two spacecraft converged at 7:01 a.m. EDT on Sept. 29, 2013. Earth’s horizon and the blackness of space provide the backdrop for the scene.

S114-E-6650 (3 August 2005) --- Astronaut Stephen K. Robinson, STS-114 mission specialist, anchored to a foot restraint on the International Space Station;s Canadarm2, participates in the mission;s third session of extravehicular activity (EVA). Robinson holds a digital still camera, updated for use on spacewalks, in his left hand.

ISS037-E-003495 (29 Sept. 2013) --- Intersecting the thin line of Earth's atmosphere, the first Cygnus commercial cargo spacecraft built by Orbital Sciences Corp. attached to the end of the Canadarm2 robotic arm of the International Space Station is photographed by an Expedition 37 crew member after the two spacecraft converged at 7:01 a.m. EDT on Sept. 29, 2013.

iss047e061107 (4/16/2016) --- View of Bigelow Expandable Activity Module (BEAM) attached to Canadarm2 Robotic Arm. The Bigelow Expandable Activity Module (BEAM) is an experimental expandable capsule that docks with the International Space Station (ISS). After docking, BEAM inflates to roughly 13 feet long and 10.5 feet in diameter to provide a habitable volume where a crew member can enter.

iss069e004822 (April 21, 2023) --- The Cygnus space freighter from Northrop Grumman is pictured moments after its release from the Canadarm2 robotic arm as the International Space Station orbited 262 miles above the Mediterranean Sea near the Spanish island of Mallorca.
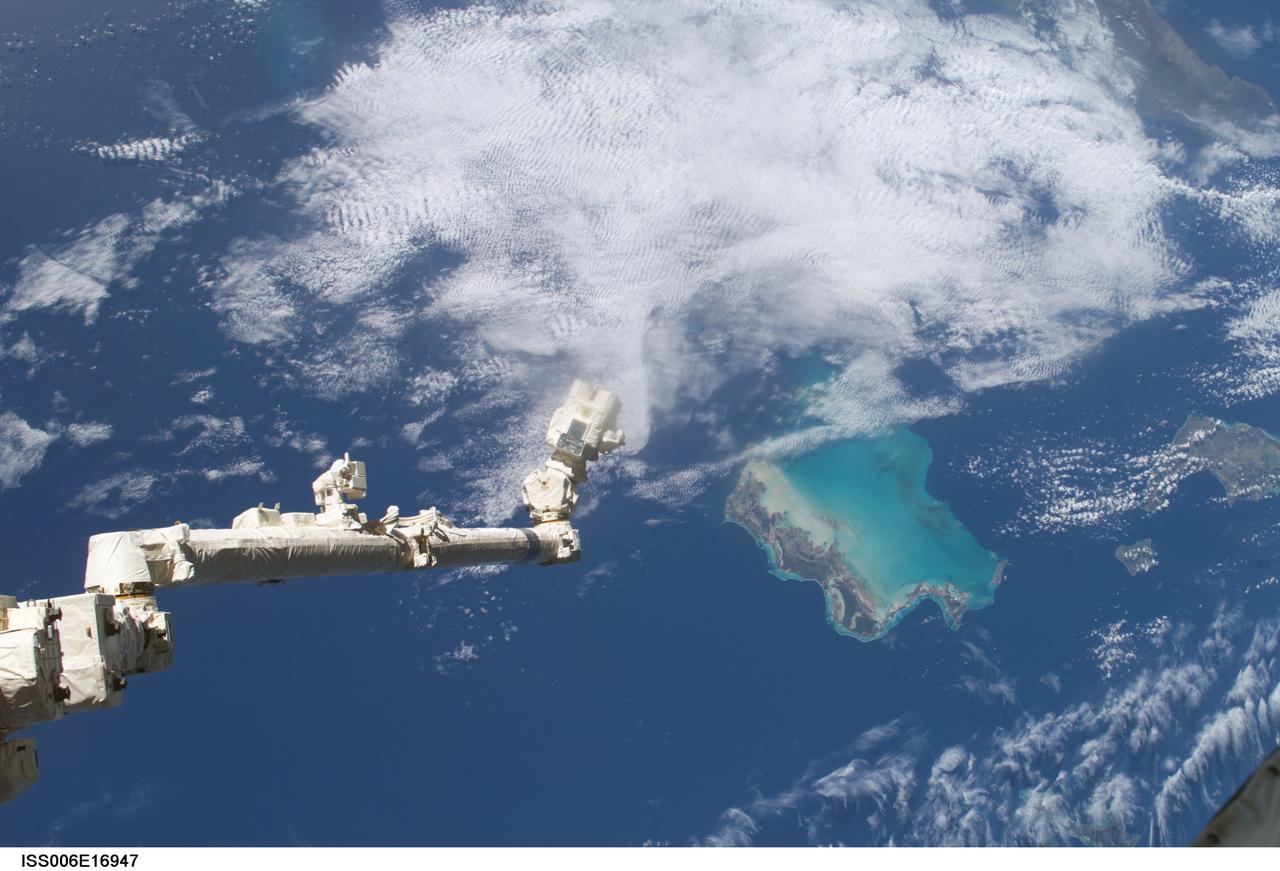
ISS006-E-16947 (9 January 2003) --- The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is pictured over the Bahama Islands in this digital still camera's view taken from the International Space Station (ISS).

iss071e439629 (Aug. 6, 2024) --- Still in the grips of the Canadarm2 robotic arm, the Northrop Grumman Cygnus space freighter is pictured attached to the Unity module's Earth-facing port. The International Space Station was orbiting 262 miles above a cloudy Pacific Ocean halfway between the U.S. island of Hawaii and the island nation of the Republic of Kiribati at the time of this photograph.

A Canadian "handshake" in space occurred on April 28, 2001, as the Canadian-built space station robotic arm (Canadarm2) transferred its launch cradle over to Endeavour's robotic arm. Pictured is astronaut James S. Voss, Expedition Two flight engineer, working the controls of the new robotic arm. Marning the controls from the shuttle's aft flight deck, Canadian Mission Specialist Chris A. Hadfield of the Canadian Space Agency (CSA) was instrumental in the activity. The Space lab pallet that carried the Canadarm2 robotic arm to the station was developed at the Marshall Space Flight Center (MSFC) in Huntsville, Alabama.

ISS037-E-018505 (22 Oct. 2013) --- The International Space Station’s Canadarm2 unberths the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean. Earth’s horizon and the blackness of space provide the backdrop for the scene.

ISS037-E-018502 (22 Oct. 2013) --- The International Space Station’s Canadarm2 unberths the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean. Earth’s horizon and the blackness of space provide the backdrop for the scene.
ISS037-E-018500 (22 Oct. 2013) --- The International Space Station’s Canadarm2 prepares to release the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean. Earth’s horizon and the blackness of space provide the backdrop for the scene.

ISS037-E-018543 (22 Oct. 2013) --- The International Space Station’s Canadarm2 prepares to release the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean.

ISS037-E-018544 (22 Oct. 2013) --- The International Space Station’s Canadarm2 prepares to release the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean.

ISS037-E-018564 (22 Oct. 2013) --- The International Space Station?s Canadarm2 releases the Orbital Sciences? Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth?s atmosphere for destruction over the Pacific Ocean. A blue and white part of Earth provides the backdrop for the scene.

ISS037-E-018501 (22 Oct. 2013) --- The International Space Station’s Canadarm2 prepares to release the Orbital Sciences’ Cygnus commercial craft after three weeks at the space station. European Space Agency astronaut Luca Parmitano and NASA astronaut Karen Nyberg, both Expedition 37 flight engineers, were at the controls of the robotics workstation removing Cygnus from the Harmony node then safely releasing it at 7:31 a.m. (EDT) Oct. 22, 2013. On Oct. 23, the Cygnus will fire its engines for the last time at 1:41 p.m. and re-enter Earth’s atmosphere for destruction over the Pacific Ocean. Earth’s horizon and the blackness of space provide the backdrop for the scene.
At the control of Expedition Two Flight Engineer Susan B. Helms, the newly-installed Canadian-built Canadarm2, Space Station Remote Manipulator System (SSRMS) maneuvers the Quest Airlock into the proper position to be mated onto the starboard side of the Unity Node I during the first of three extravehicular activities (EVA) of the STS-104 mission. The Quest Airlock makes it easier to perform space walks, and allows both Russian and American spacesuits to be worn when the Shuttle is not docked with the International Space Station (ISS). American suits will not fit through Russion airlocks at the Station. The Boeing Company, the space station prime contractor, built the 6.5-ton (5.8 metric ton) airlock and several other key components at the Marshall Space Flight Center (MSFC), in the same building where the Saturn V rocket was built. Installation activities were supported by the development team from the Payload Operations Control Center (POCC) located at the MSFC and the Mission Control Center at NASA's Johnson Space Flight Center in Houston, Texas.

iss073e1046014 (Oct. 29, 2025) --- The new HTV-X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is pictured in the grips of the Canadarm2 robotic arm after completing its arrival at the International Space Station. The spacecraft launched four days earlier from the Tanegashima Space Center in Japan carrying approximately 12,800 pounds of science, supplies, and hardware for the Expedition 73 crew.

iss073e0988452 (Oct. 29, 2025) --- The new HTV-X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency), carrying approximately 12,800 pounds of science, supplies, and hardware for the Expedition 73 crew, is pictured after being captured by the Canadarm2 robotic arm. The Common Berthing Mechanism, located at the base of HTV-X1, is visible and serves as the interface that attaches the spacecraft to the Earth-facing port on the International Space Station’s Harmony module, enabling crew access to the cargo inside.

iss073e0695937 (Sept. 1, 2025) --- The Canadarm2 robotic arm with Dextre, its fine-tuned robotic hand attached, is pictured extending from the International Space Station as it orbited 258 miles above the coast of Cambodia on a cloudy Gulf of Thailand.

iss073e0546366 (Aug. 27, 2025) --- The International Space Station's 57.7-foot-long robotic arm, Canadarm2, with its fine-tuned robotic hand, Dextre, attached is pictured extending from the International Space Station's Harmony module. The orbital outpost was soaring 260 miles above the Saharan Desert in Libya at the time of this photograph.
STS105-E-5341 (17 August 2001) --- Backdropped by a sunset, the Canadarm2 / Space Station Remote Manipulator System (SSRMS) is being operated by a crewmember from the International Space Station (ISS). This image was taken with a digital still camera through a window on the flight deck of the Space Shuttle Discovery by a STS-105 crewmember.
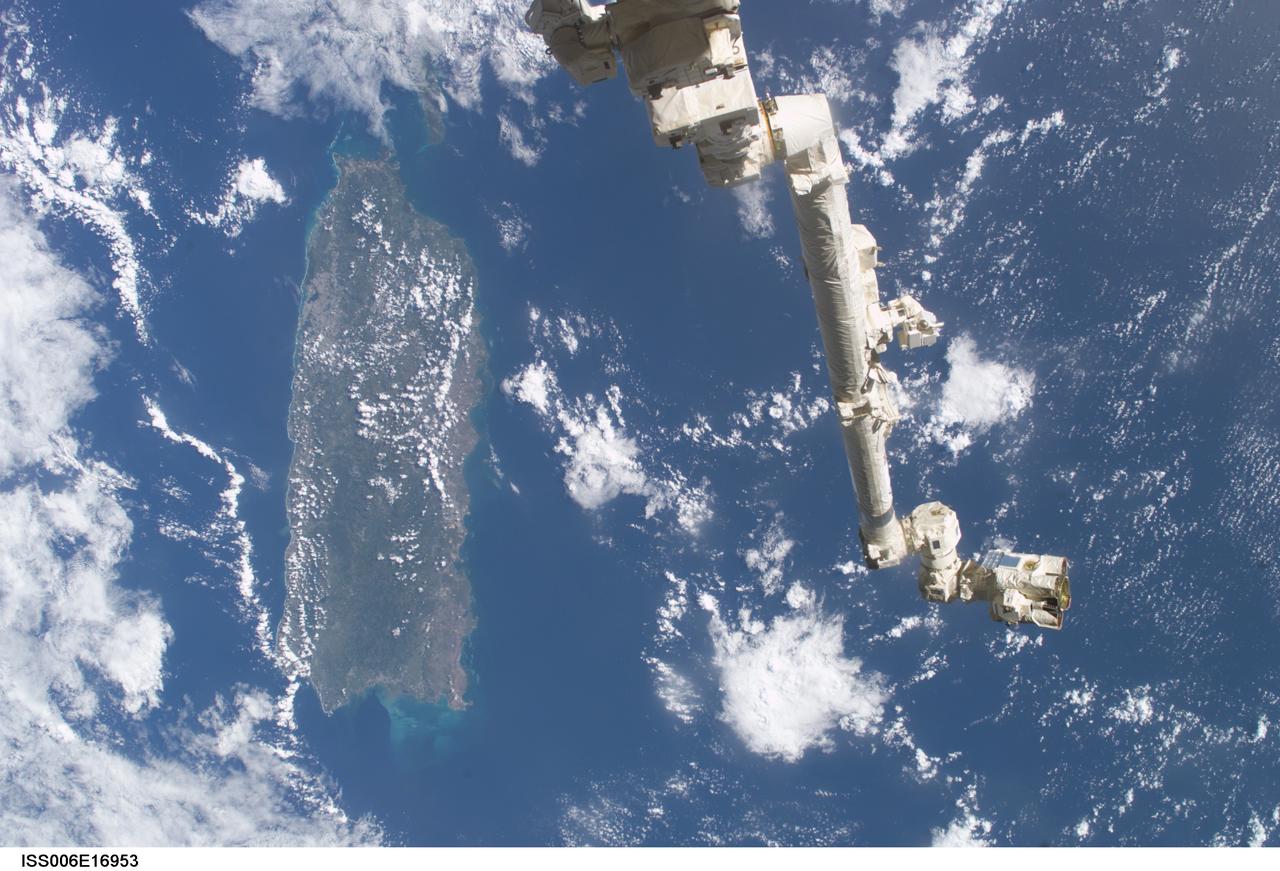
ISS006-E-16953 (9 January 2003) --- The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is backdropped against the Caribbean Sea in this digital still camera's view taken from the International Space Station (ISS). Puerto Rico is in the left side of the frame.

iss074e0367686 (March 26, 2026) --- The HTV‑X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is grasped by the Canadarm2 robotic arm in this long-duration photograph from the International Space Station as it orbited 265 miles above northeastern China. Moments later, Canadarm2 would release HTV‑X1 into Earth orbit, completing the spacecraft’s four‑month stay attached to the orbital outpost’s Harmony module. Credit: NASA/Chris Williams

iss074e0365138 (March 6, 2026) --- The HTV‑X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is grasped by the Canadarm2 robotic arm as the International Space Station orbits 271 miles above the Indian Ocean, off the coast of South Africa. Moments later, Canadarm2 would release HTV‑X1 into Earth orbit, completing the spacecraft’s four‑month stay attached to the orbital outpost’s Harmony module. Credit: NASA

iss074e0365023 (March 6, 2026) --- The HTV‑X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is grasped by the Canadarm2 robotic arm as the International Space Station orbits 271 miles above the Indian Ocean, southeast of Madagascar. Moments later, Canadarm2 would release HTV‑X1 into Earth orbit, completing the spacecraft’s four‑month stay attached to the orbital outpost’s Harmony module. Credit: NASA
iss073e0988465 (Oct. 29, 2025) --- The new HTV-X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency), carrying about 12,800 pounds of science, supplies, and hardware for the Expedition 73 crew, is pictured in the grip of the Canadarm2 robotic arm. JAXA astronaut and Expedition 73 Flight Engineer Kimiya Yui (not pictured) commanded Canadarm2 to gently reach out and capture HTV-X1 when the spacecraft reached a point about 10 meters away from the International Space Station.

ISS006-E-21378 (18 January 2003) --- A portion of the Canadarm2, or Space Station Remote Manipulator System (SSRMS), was photographed by one of the Expedition 6 crewmembers onboard the International Space Station (ISS). Just above Canadarm2’s elbow are the Pleiades, also known as the Seven Sisters. These seven stars, arranged like a little dipper, are just the brightest members of a cluster of more than 3000 stars lying 400 light years from Earth. Between the robotic arm and the Pleiades is Earth itself. Below, the cloudy landscape is lit by a nearly-full Moon (out of frame). Above, the edge of Earth’s atmosphere is defined by a layer of glowing air—a brownish-yellow band of light stretching all the way across the image. And finally, just under Canadarm’s elbow, is a streak of green—the Aurora Borealis, also known as “northern lights”.
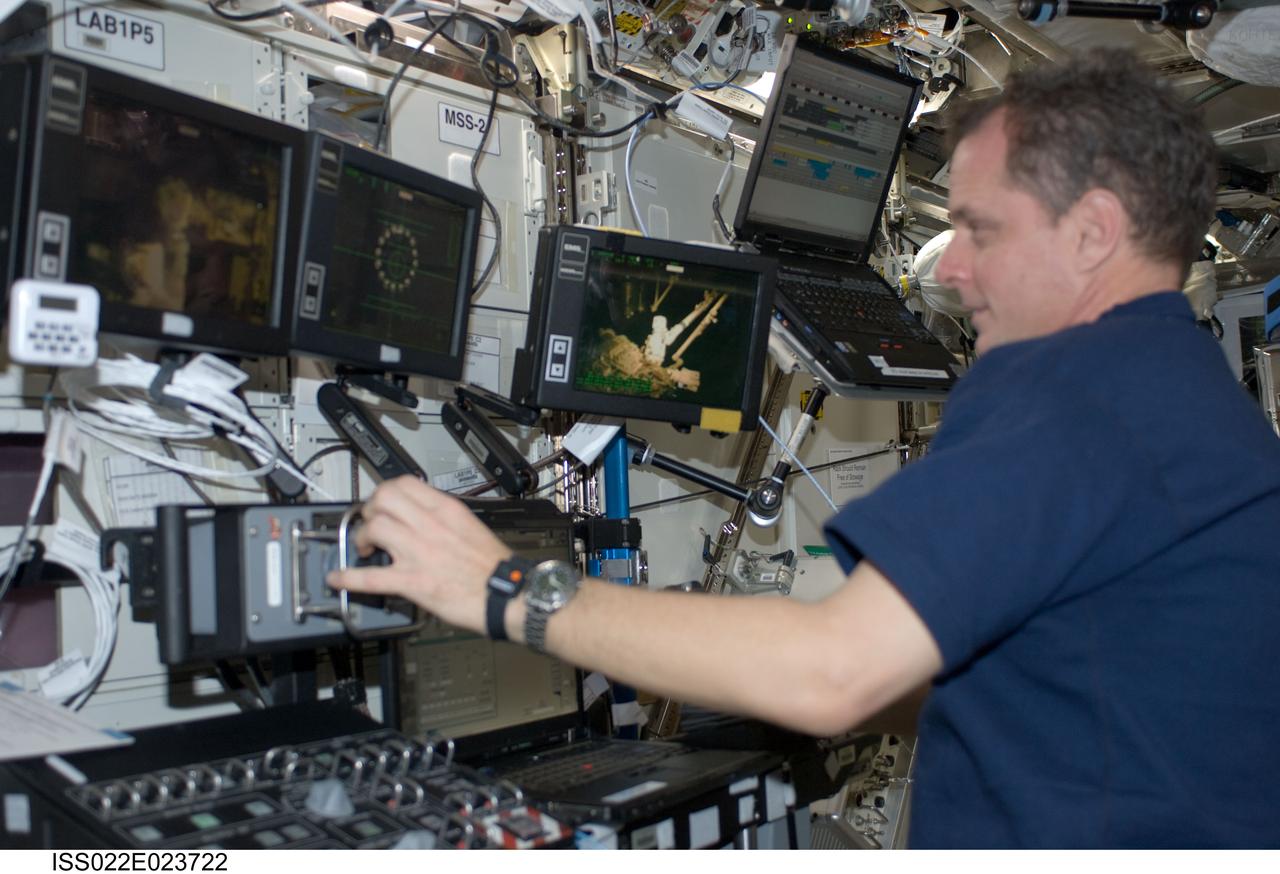
ISS022-E-023722 (11 Jan. 2010) --- NASA astronaut T.J. Creamer, Expedition 22 flight engineer, works controls at the Canadarm2 workstation in the Destiny laboratory of the International Space Station.

jsc2019e062856 (10-10-19) --- Canadian Space Agency (CSA) astronaut Jennifer Sidey-Gibbons participates in Canadarm2 robotics training at CSA headquarters in Saint-Hubert, Quebec. Photo Credit: (Canadian Space Agency)

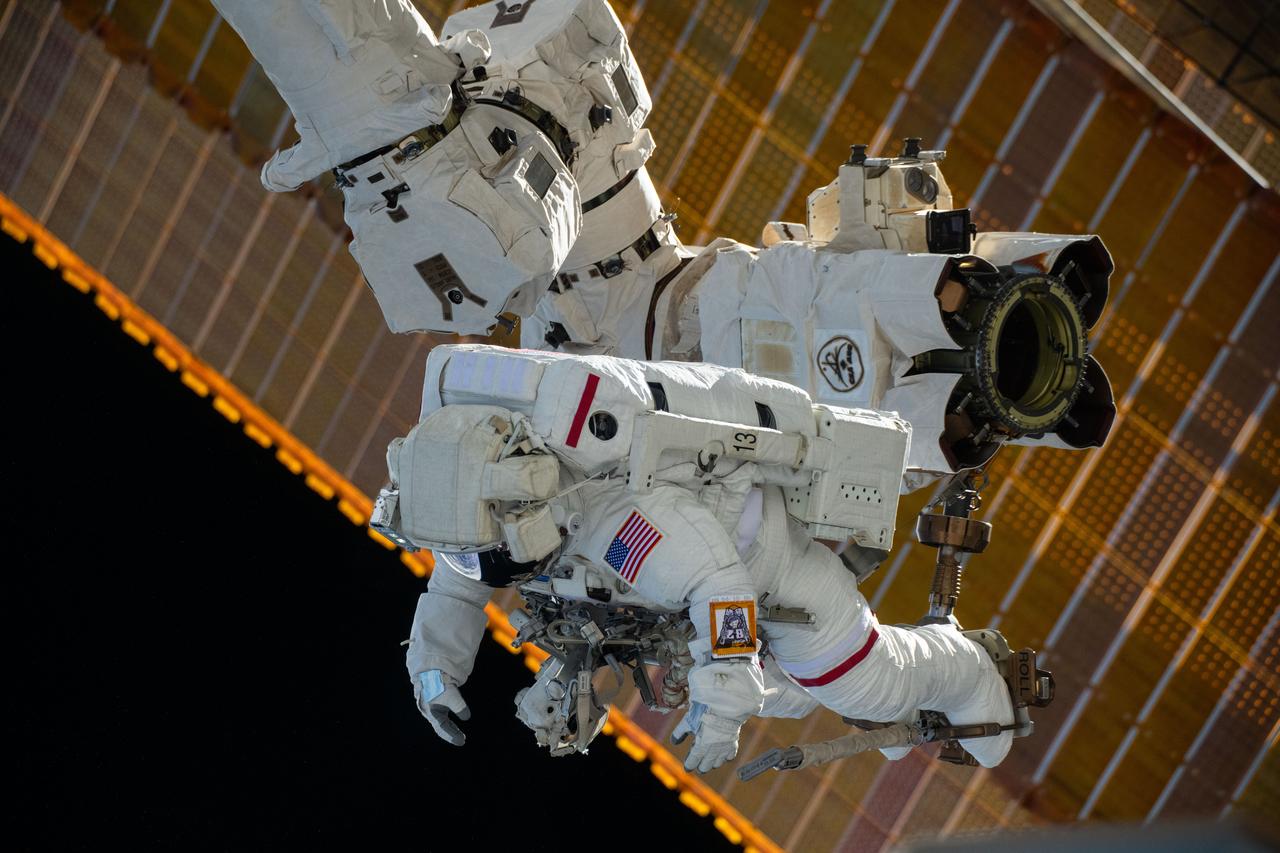
iss072e595424 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e595426 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.
iss073e0695491 (Sept. 1, 2025) --- The Canadarm2 robotic arm with Dextre, its fine-tuned robotic hand attached, is pictured extending from the International Space Station as it orbited 258 miles above the Indian Ocean southwest of the Indonesian island of Sumatra. The Earth's horizon is highlighted by the atmospheric glow with a set of the orbital outpost's main solar arrays and a partially obscured SpaceX Dragon cargo spacecraft in the foreground.

iss074e0319321 (Feb. 19, 2026) --- JAXA’s (Japan Aerospace Exploration Agency) HTV-X1 cargo craft, with the Canadarm2 robotic arm perched on a portable data grapple fixture in front, is pictured berthed to the Earth-facing port of the International Space Station’s Harmony module. At the time of this photograph, the orbital outpost was soaring 263 miles above a cloudy Indian Ocean northeast of Madagascar. Credit: NASA/Chris Williams

iss072e574908 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams seemingly hangs upside down while attached to the Canadarm2 robotic arm's latching end effector during a five-hour and 26 minute spacewalk to remove and stow a radio frequency group antenna assembly. The orbital outpost was soaring 260 miles above Russia near the Sea of Azov at the time of this photograph.

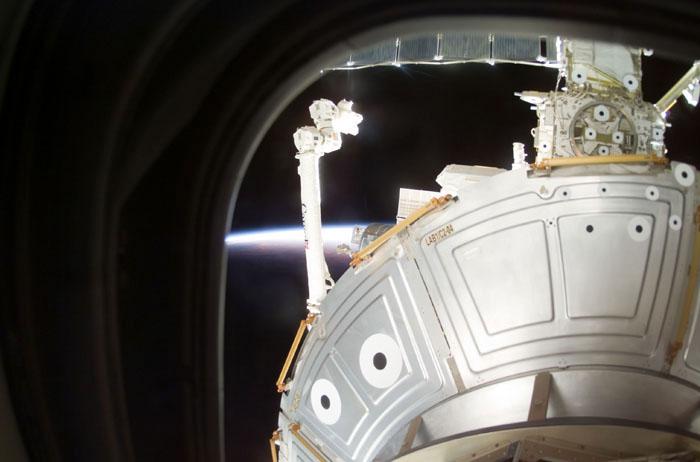
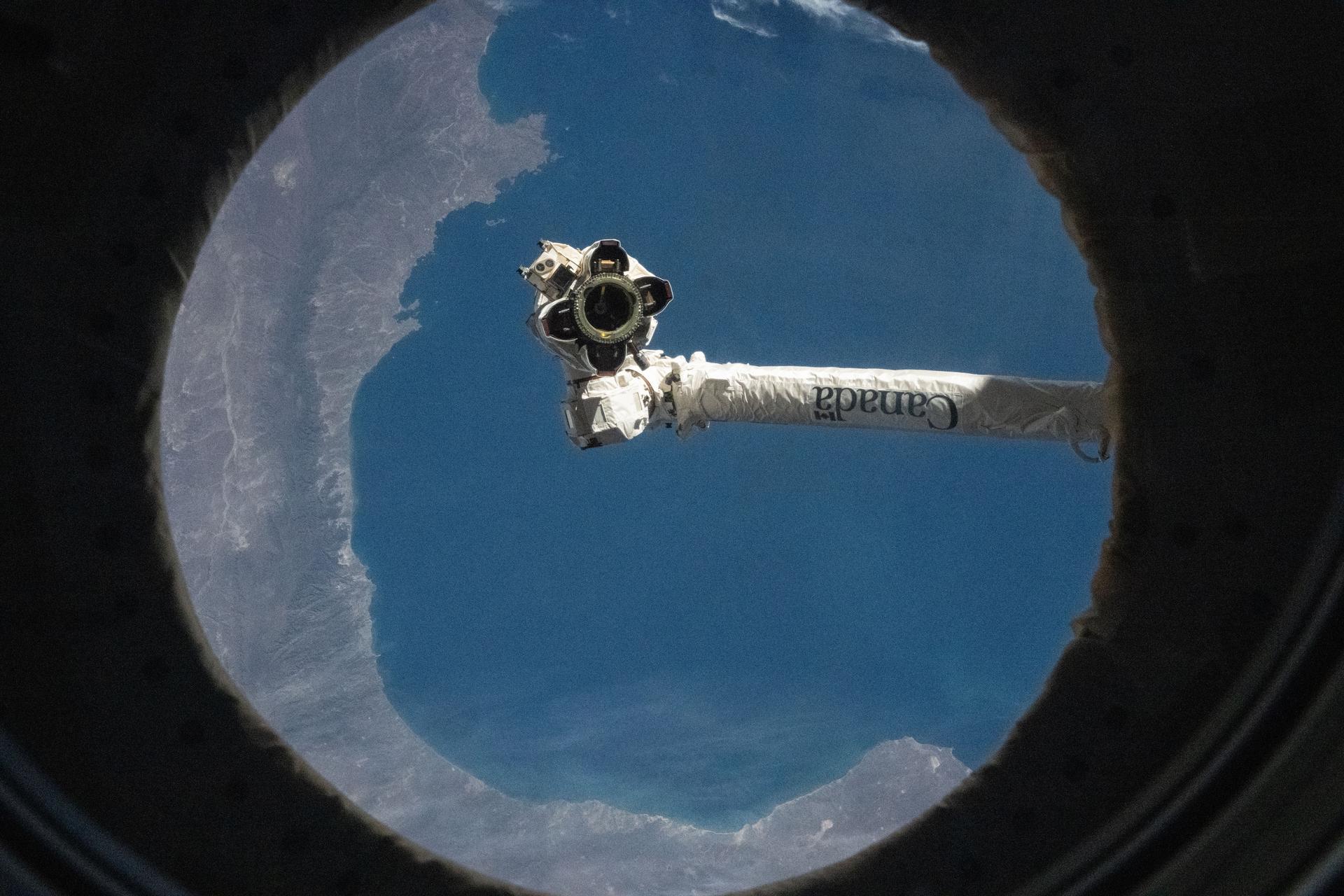
iss074e0503977 (April 12, 2026) --- This view from a window in the International Space Station’s cupola highlights the 57.7‑foot‑long Canadarm2 robotic arm attached to a power‑and‑data grapple fixture on the Harmony module. The orbital outpost was soaring 264 miles above the Atlantic Ocean northwest of Puerto Rico at the time of this photograph. Credit: NASA/Chris Williams

iss058e002666 (Jan. 13, 2019) --- The SpaceX Dragon cargo craft is pictured in the grips of the Canadarm2 robotic arm before its release and departure from the International Space Station. Featured prominently in the lower foreground is one of two cymbal-shaped UltraFlex solar arrays attached to the Northrop Grumman Cygnus resupply ship. The orbital complex was orbiting 254 miles above East Asia at the time this photograph was taken.
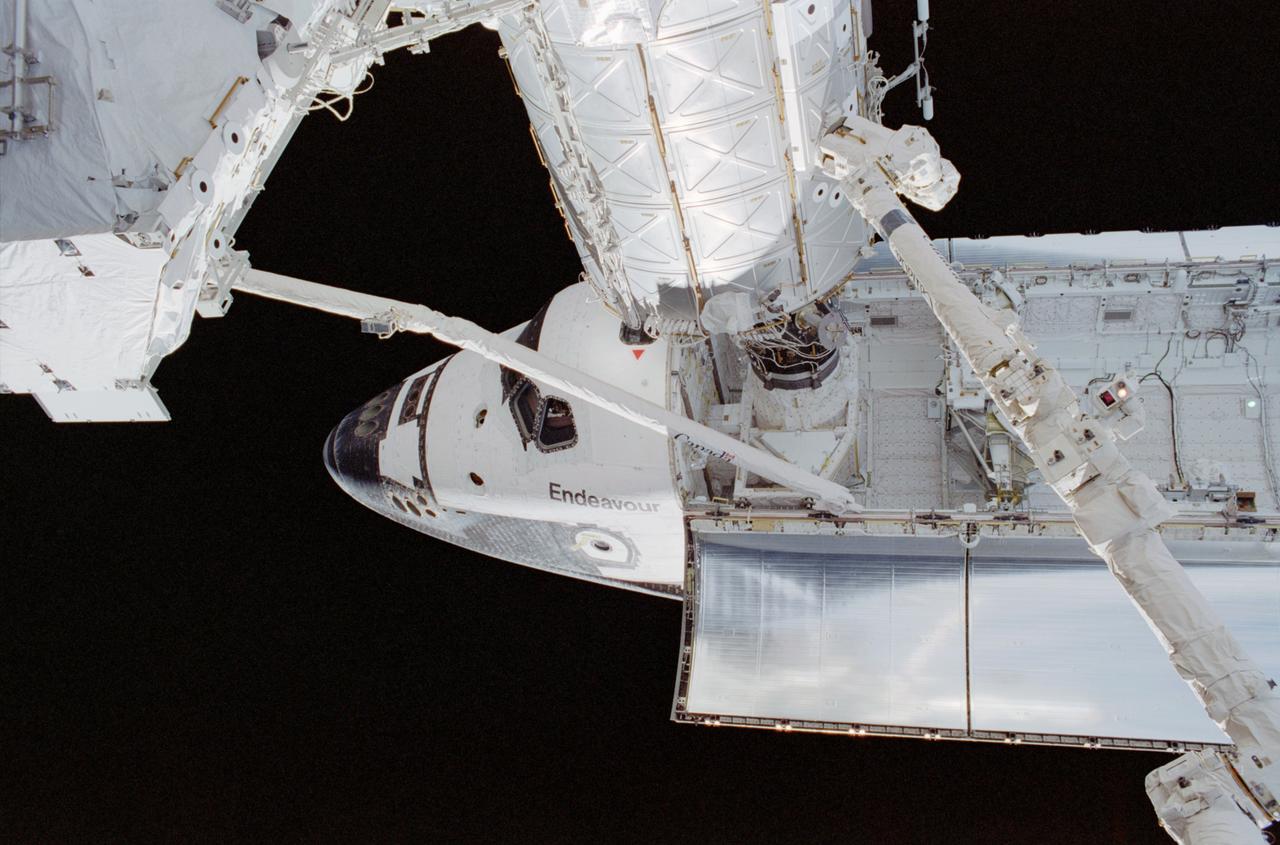
The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot, and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valeri G. Korzun, commander, Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm; and the task of unloading supplies and science experiments from the Leonardo multipurpose Logistics Module, which made its third trip to the orbital outpost. In this photograph, the Space Shuttle Endeavour, back dropped by the blackness of space, is docked to the pressurized Mating Adapter (PMA-2) at the forward end of the Destiny Laboratory on the ISS. A portion of the Canadarm2 is visible on the right and Endeavour's robotic arm is in full view as it is stretched out with the S0 (S-zero) Truss at its end.

jsc2019e062855 (10-10-19) --- Canadian Space Agency (CSA) astronaut Jennifer Sidey-Gibbons (left) and NASA astronaut candidate Matthew Dominick (right) participate in Canadarm2 robotics training at CSA headquarters in Saint-Hubert, Quebec. Photo Credit: (Canadian Space Agency)

iss071e329922 (July 12, 2024) -- Northrop Grumman's Cygnus space freighter is pictured attached to the Canadarm2 robotic arm ahead of its release from the International Space Station's Unity module. The orbiting lab and Cygnus were soaring into orbital daytime as this photo was taken.

iss074e0378294 (March 12, 2026) --- Northrop Grumman's Cygnus XL cargo spacecraft, with its two prominent cymbal-shaped UltraFlex solar arrays, is in the grasp of the Canadarm2 robotic arm before being released and departing the International Space Station to complete its resupply mission. Credit: NASA/Jessica Meir

ISS006-E-43973 (6 April 2003) --- Backdropped against a blue and white Earth, the Space Station Remote Manipulator System (SSRMS) or Canadarm2 is pictured in this digital still camera’s view taken from the International Space Station (ISS).

jsc2019e062853 (10-10-19) --- Canadian Space Agency (CSA) astronaut Jennifer Sidey-Gibbons (right) and NASA astronaut candidate Matthew Dominick (left) participate in Canadarm2 robotics training at CSA headquarters in Saint-Hubert, Quebec. Photo Credit: (Canadian Space Agency)
iss072e576480 (Jan. 31, 2025) --- The 57.7-foot-long Canadarm2 robotic arm with its latching end effector that can grapple spacecraft or maneuver spacewalkers is pictured as the International Space Station orbited into daylight 267 miles above the South Pacific Ocean just south of New Zealand's Auckland Islands.
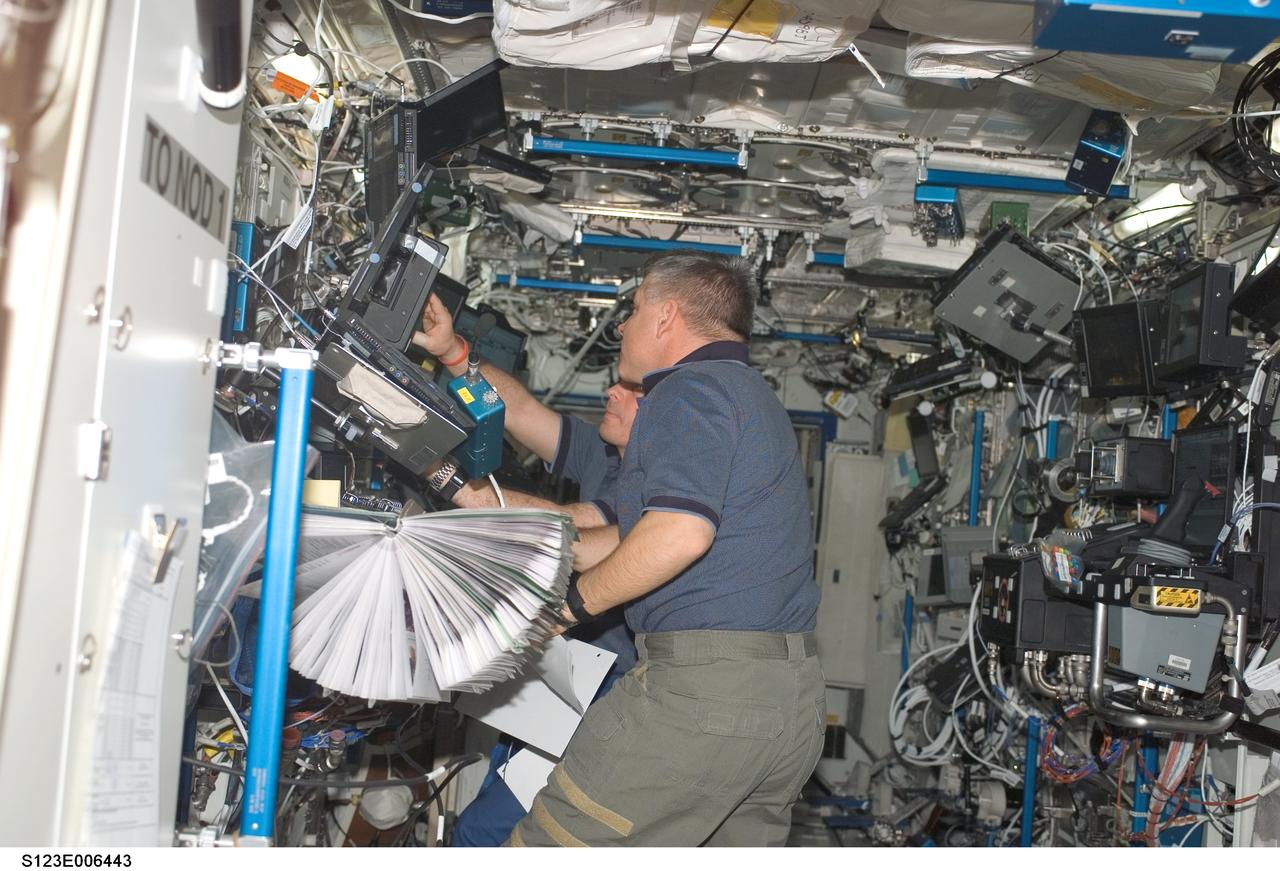
S123-E-006443 (16 March 2008) --- Astronauts Gregory H. Johnson, STS-123 pilot; and Garrett Reisman (partially obscured), Expedition 16 flight engineer, work the controls of the space station's robotic Canadarm2 in the Destiny laboratory of the International Space Station while Space Shuttle Endeavour is docked with the station.

iss073e0920711 (Oct. 21, 2025) --- The Canadarm2 robotic arm releases Northrop Grumman’s Cygnus XL cargo craft after it was installed on the Earth-facing port of the Unity module. The International Space Station was soaring into an orbital sunrise 269 miles above the Atlantic Ocean southwest of Cape Town, South Africa, at the time of this photgraph.
iss073e0657546 (Sept. 8, 2025) --- The 57.7-foot-long Canadarm2 robotic arm extends from a grapple fixture on the International Space Station as it soared into an orbital sunrise 260 miles above the Philippine Sea at approximately 4:04 a.m. local time.
iss074e0458270 (April 13, 2026) --- Northrop Grumman's Cygnus XL cargo spacecraft, carrying over 11,000 pounds of new science experiments, lab hardware, and crew supplies, is pictured moments before its capture with the Canadarm2 robotic arm following its approach and rendezvous with the International Space Station. Credit: NASA

iss074e0458279 (April 13, 2026) --- Northrop Grumman's Cygnus XL cargo spacecraft, carrying over 11,000 pounds of new science experiments, lab hardware, and crew supplies, is pictured in the grips of the Canadarm2 robotic arm following its capture at the International Space Station. Credit: NASA
iss073e0702302 (Sept. 16, 2025) --- NASA astronauts Zena Cardman and Jonny Kim, both Expedition 73 flight engineers, practice Canadarm2 robotic arm maneuvers on the Destiny laboratory module's robotics workstation. Kim commanded the Canadarm2 two days later to capture Northrop Grumman's Cygnus XL cargo craft with Cardman backing him up as the spacecraft arrived at the International Space Station.

iss073e0981639 (Sept. 11, 2025) --- NASA astronaut and Expedition 73 Flight Engineer Zena Cardman practices Canadarm2 robotic maneuvers at the robotics workstation inside the International Space Station's cupola. Kim was preparing for the robotic capture of the Northrop Grumman Cygnus XL cargo spacecraft that launched on Sept. 14, 2025, and arrived on Sept. 18 delivering about 11,000 pounds of science, supplies, and hardware to the Expedition 73 crew.

iss073e0819948 (Oct. 2, 2025) --- The Canadarm2 robotic arm, with Dextre—its fine-tuned robotic hand—attached, extends from the International Space Station’s Harmony module as the orbital outpost soars 263 miles above Kazakhstan. At upper center is Lake Balkhash, notable for its two distinct segments: the western portion contains freshwater, while the eastern portion holds saltwater due to a combination of geography, hydrology, and limited water circulation.
iss074e0378958 (March 12, 2026) --- The Canadarm2 robotic arm's latching end effector, or LEE, is pictured from a window on the International Space Station after it had released Norrthrop Grumman's Cygnus XL cargo spacecraft into Earth orbit ending its resupply mission. The orbitial outpost was soaring 271 miles above the Atlantic Ocean off the coast of southern Argentina when this photograph was taken. Credit: NASA/Chris Williams

iss074e0364782 (March 5, 2026) --- The HTV‑X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is in the grasp of the Canadarm2 robotic arm after being detached from the Earth‑facing port on the International Space Station’s Harmony module. The orbital outpost was soaring 274 miles above the Pacific Ocean off the coast of South America’s Patagonia region at the time of this photograph. Credit: NASA/Jessica Meir

iss074e0364790 (March 5, 2026) --- The HTV‑X1 cargo spacecraft from JAXA (Japan Aerospace Exploration Agency) is in the grasp of the Canadarm2 robotic arm after being detached from the Earth‑facing port of the International Space Station’s Harmony module. The orbital outpost was soaring 274 miles above the Pacific Ocean off the coast of South America’s Patagonia region at the time of this photograph. Credit: NASA/Jessica Meir

iss072e574907 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e157843 (Nov. 11, 2024) --- The Canadarm2 robotic arm with its fine-tuned robotic hand Dextre, or the Special Purpose Dexterous Manipulator, attached is pictured after maneuvering and installing scientific hardware on the International Space Station. Dextre is remotely operated by robotics controllers on the ground providing precise handling capabilities reducing the need for spacewalks giving astronauts more time to conduct science.

ISS022-E-023604 (12 Jan. 2010) --- Japan Aerospace Exploration Agency (JAXA) astronaut Soichi Noguchi, Expedition 22 flight engineer, works controls at the Canadarm2 workstation in the Destiny laboratory of the International Space Station during the relocation of the External Stowage Platform 3 (ESP-3) from the P3 truss upper site to the S3 truss lower site.

iss073e0981611 (Sept. 11, 2025) --- NASA astronaut and Expedition 73 Flight Engineer Jonny Kim practices Canadarm2 robotic maneuvers at the robotics workstation inside the International Space Station's cupola. Kim was preparing for the robotic capture of the Northrop Grumman Cygnus XL cargo spacecraft that launched on Sept. 14, 2025, and arrived on Sept. 18 delivering about 11,000 pounds of science, supplies, and hardware to the Expedition 73 crew.
iss072e595491 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e595496 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

ISS015-E-21945 (11 Aug. 2007) --- The Canadarm2 (center) and solar array panel wings on the International Space Station are featured in this image photographed by a crewmember during the mission's first planned session of extravehicular activity (EVA) while Space Shuttle Endeavour (STS-118) was docked with the station. The blackness of space and Earth's horizon provide the backdrop for the scene.

iss072e595502 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss074e0459132 (April 13, 2026) --- Northrop Grumman's Cygnus XL cargo spacecraft is held in the grips of the Canadarm2 robotic arm as it is maneuvered toward the International Space Station’s Unity module for installation. Cygnus XL delivered more than 11,000 pounds of new science experiments, lab hardware, and crew supplies for the Expedition 74 crew. Credit: NASA/Jessica Meir