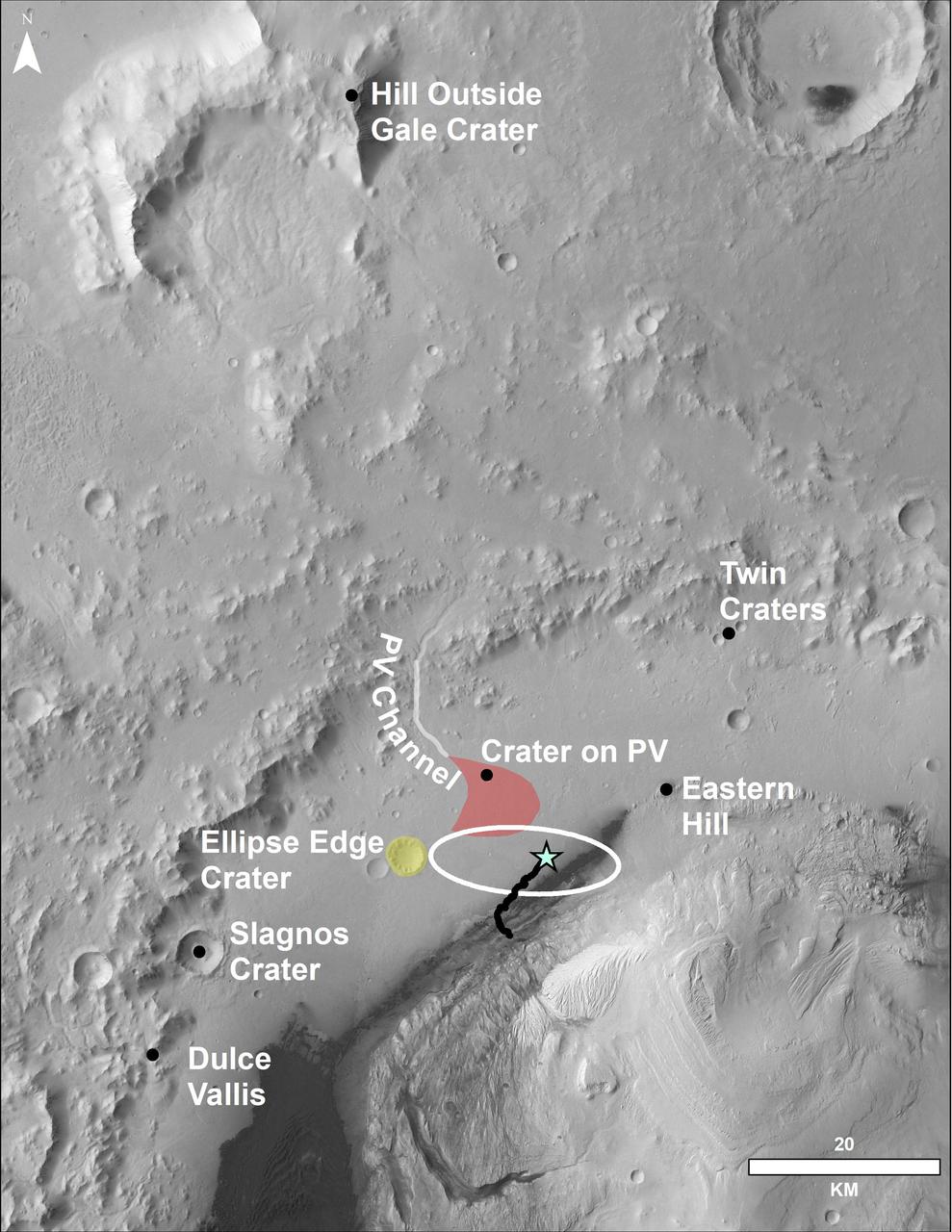
This image of the northwestern portion of Mars' Gale Crater and terrain north of it, from the European Space Agency's Mars Express orbiter, provides a locator map for some features visible in an October 2017 panorama from NASA's Curiosity Mars rover (see PIA22210, Fig. 1). A blue star marks the rover's landing site, on the floor of Gale Crater near the base of Mount Sharp. That layered mountain occupies the middle of the crater. The black line indicates the path of the rover's traverse from its August 2012 landing to about the location on lower Mount Sharp, where the panorama was acquired. North is toward the top. At lower right is a 20-kilometer (12.4-mile) scale bar. The base-map image was taken by the High Resolution Stereo Camera on Mars Express. https://photojournal.jpl.nasa.gov/catalog/PIA22208
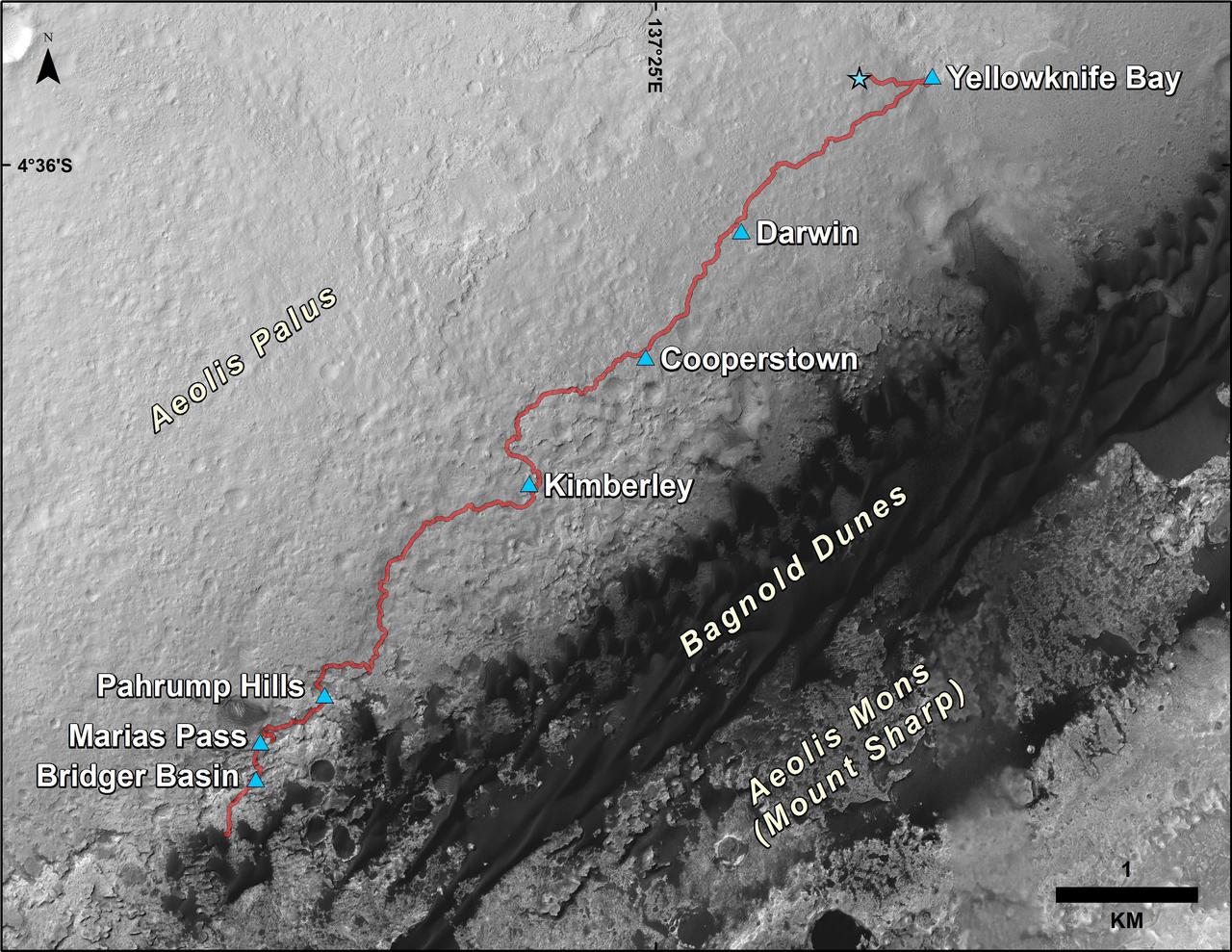
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to its location in December 2015.
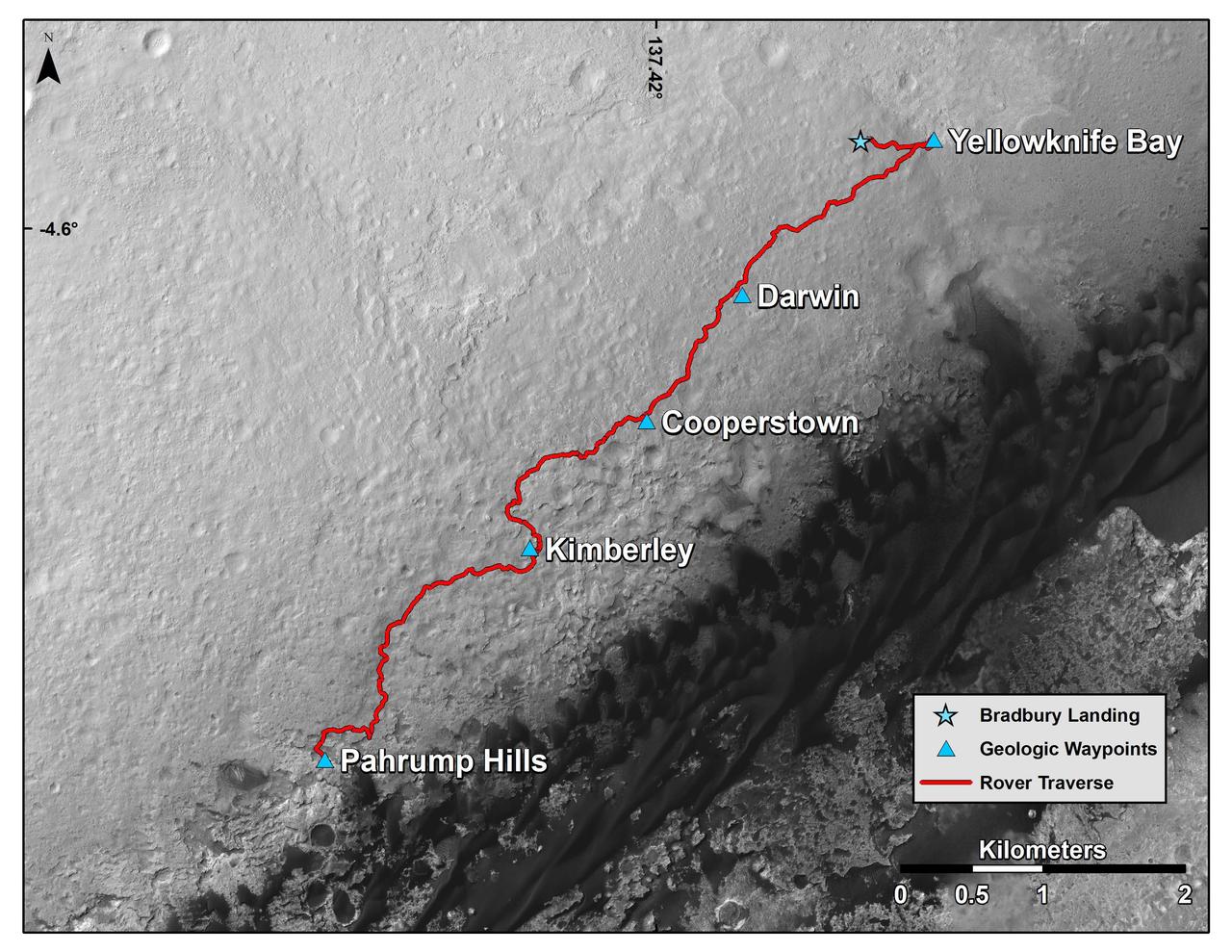
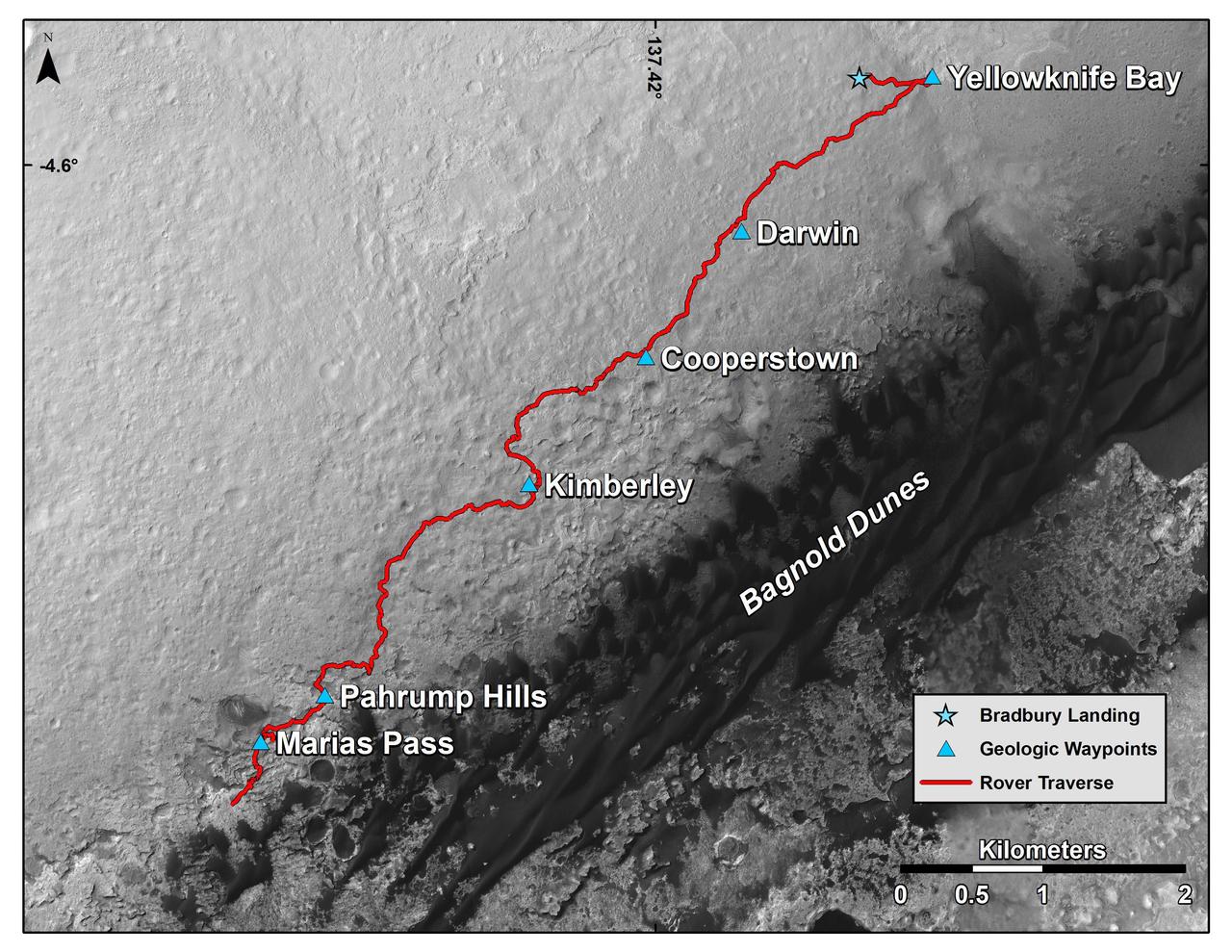
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to the Pahrump Hills outcrop at the base of Mount Sharp.
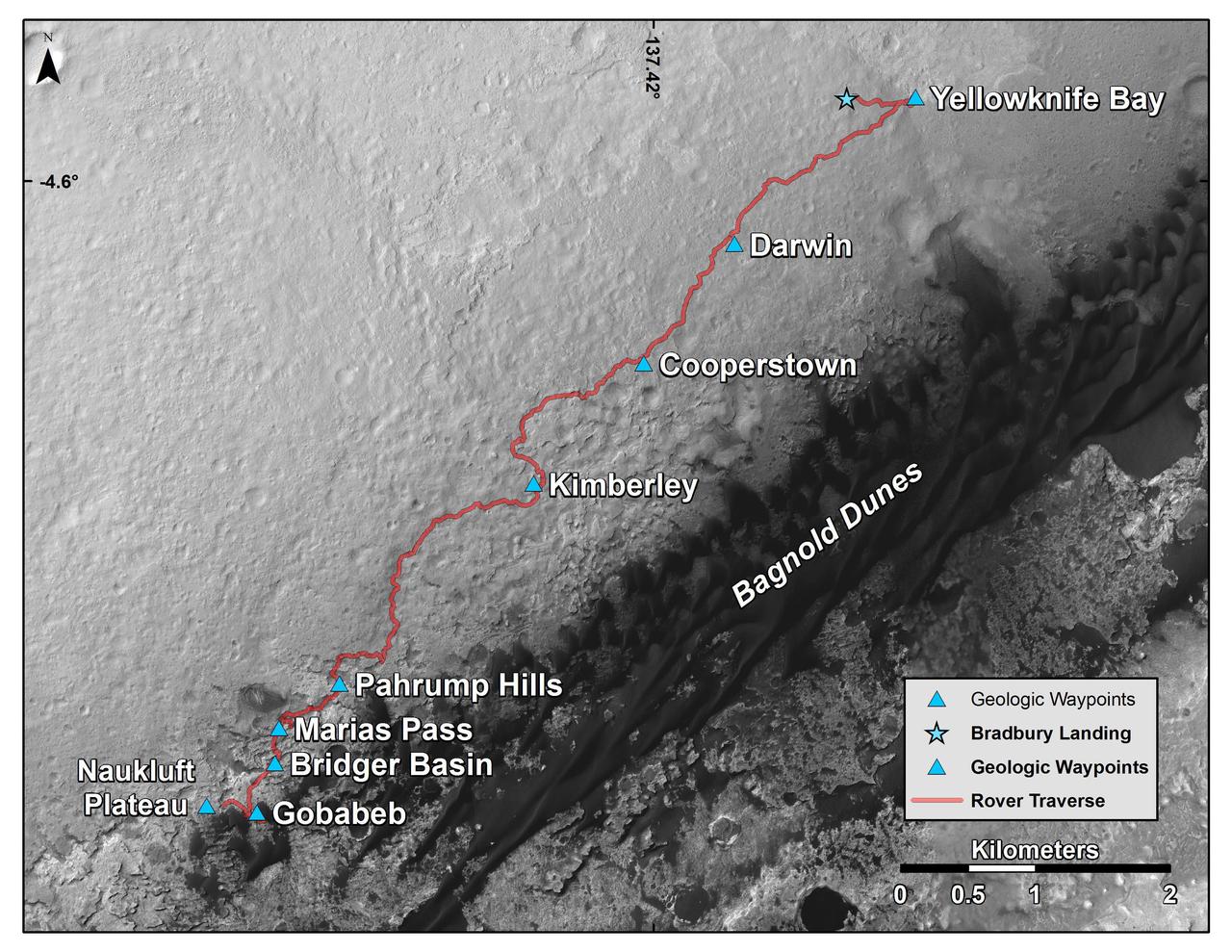
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to its location in early March 2016, approaching a geological waypoint called Naukluft Plateau.
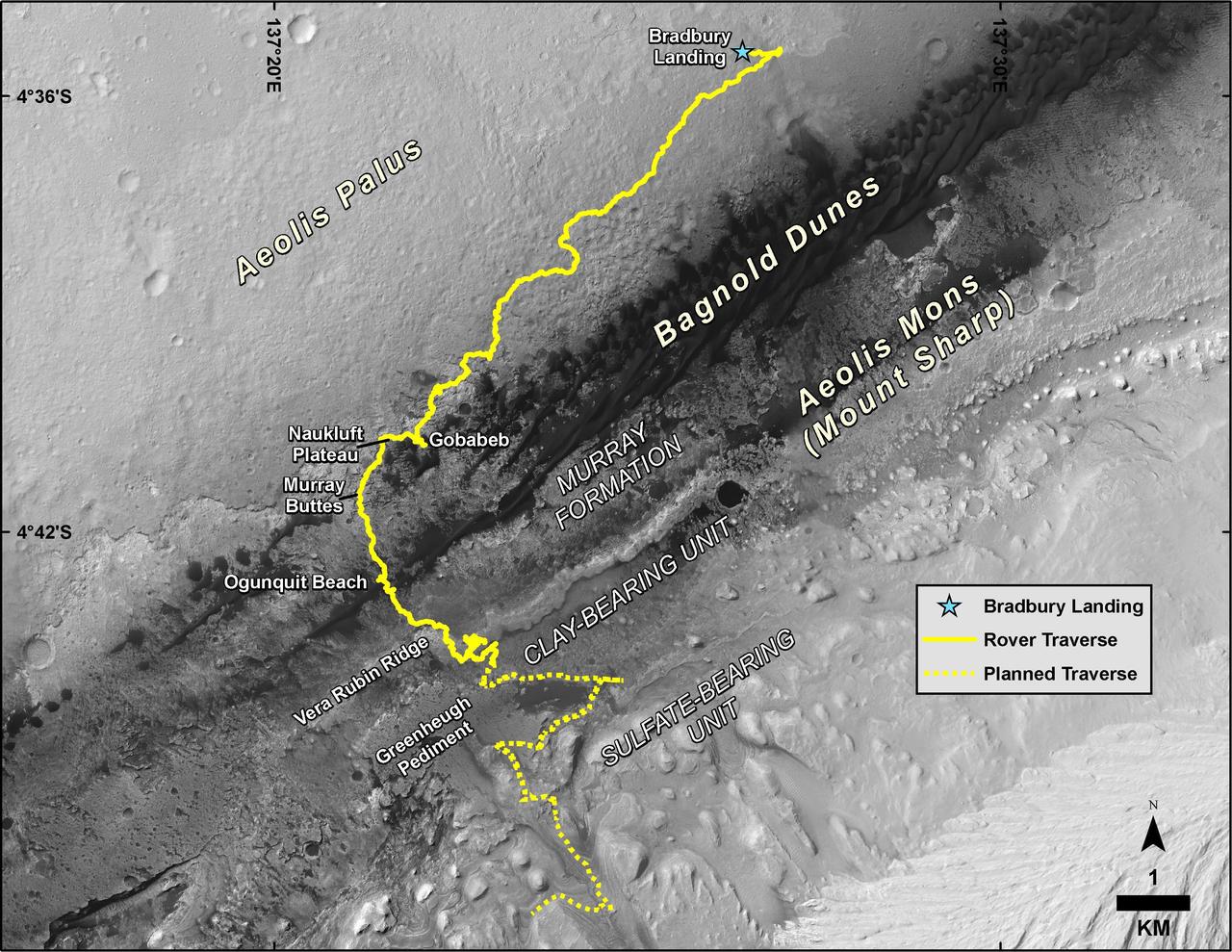
This map shows the route driven by NASA's Curiosity Mars rover, from the location where it landed in August 2012 to its location in August 2019, and its planned path to additional geological layers of lower "Mount Sharp." The blue star near top center marks "Bradbury Landing," the site where Curiosity arrived on Mars on Aug. 5, 2012, PDT (Aug. 6, EDT and Universal Time). Curiosity landed on Aeolis Palus, the plains surrounding Aeolis Mons (Mount Sharp) in Gale Crater. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on the Mars Reconnaissance Orbiter. North is up. "Bagnold Dunes" form a band of dark, wind-blown material at the foot of Mount Sharp. The scale bar at lower right represents one kilometer (0.62 mile). https://photojournal.jpl.nasa.gov/catalog/PIA23412
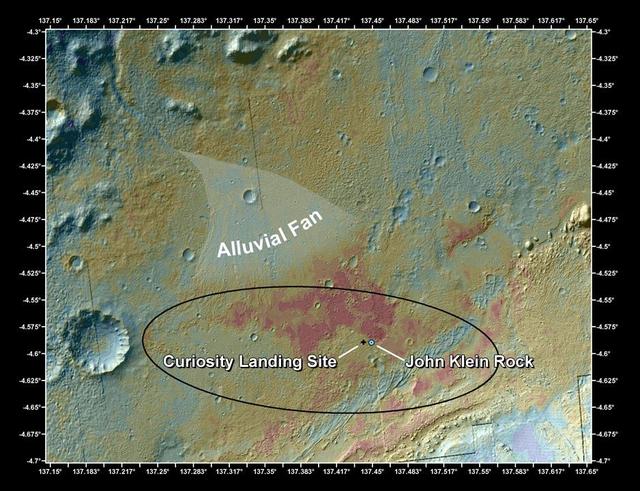
This false-color map shows the area within Gale Crater on Mars, where NASA Curiosity rover landed on Aug. 5, 2012 PDT Aug. 6, 2012 EDT and the location where Curiosity collected its first drilled sample at the John Klein rock.
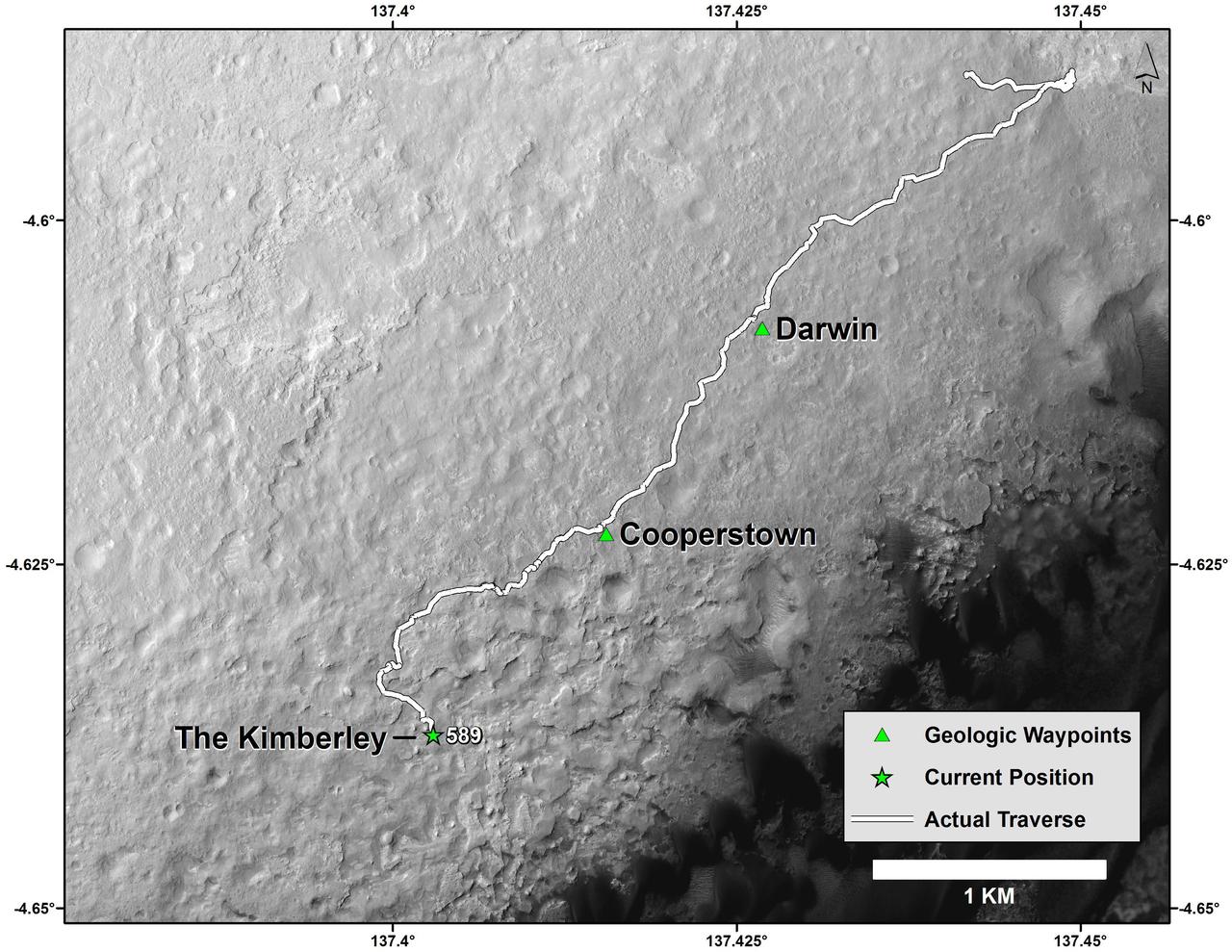
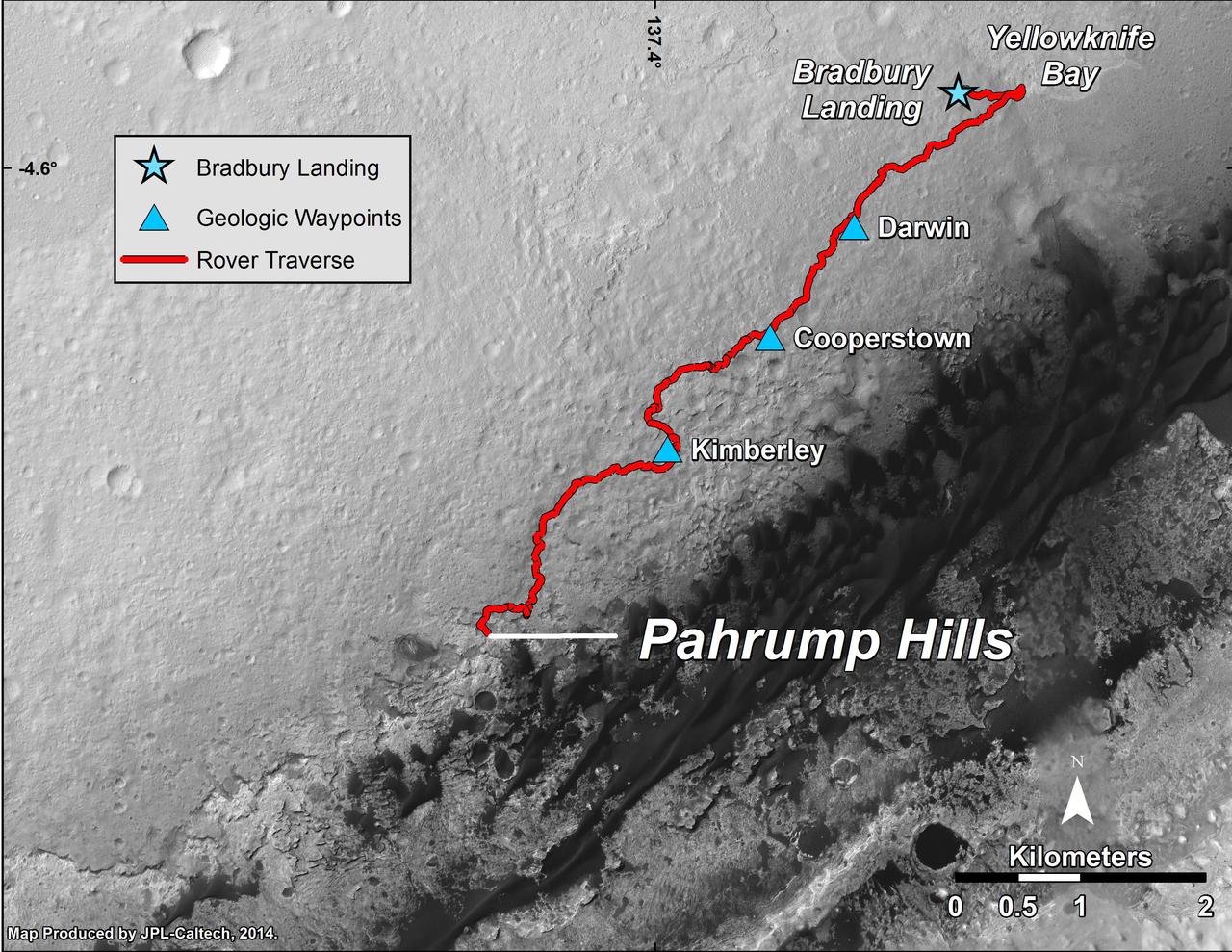
This map shows the route driven by NASA Curiosity Mars rover from the Bradbury Landing location where it landed in August 2012 the start of the line in upper right to a major waypoint called the Kimberley.
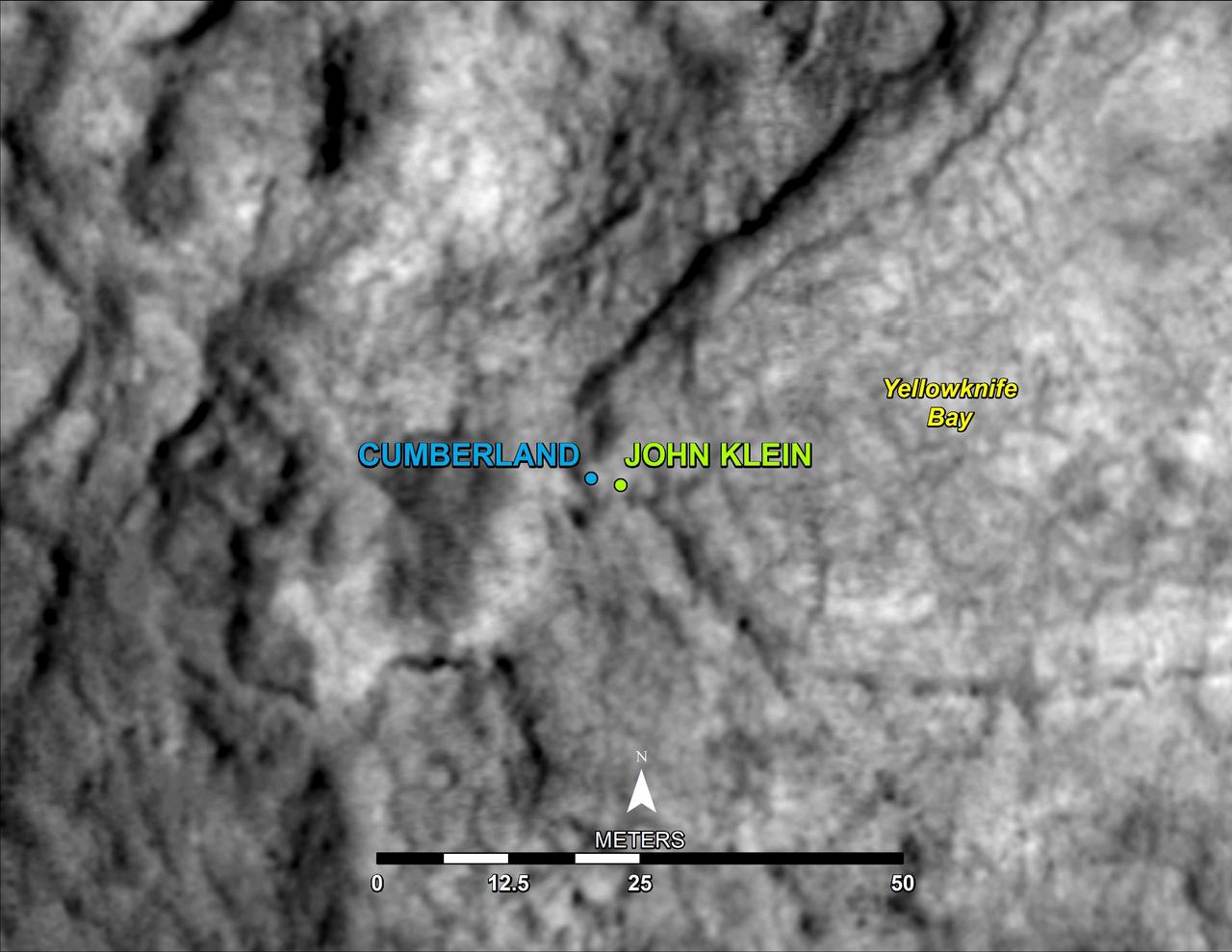
This map shows the location of Cumberland, the second rock-drilling target for NASA Mars rover Curiosity, in relation to the rover first drilling target, John Klein, within the southwestern lobe of a shallow depression called Yellowknife Bay.
This map shows the route driven by NASA Curiosity Mars rover from the Bradbury Landing location where it landed in August 2012 to the Pahrump Hills outcrop where it drilled into the lowest part of Mount Sharp.
This map shows the route driven by NASA Curiosity Mars in its approach to and April 1, 2014, arrival at a waypoint called the Kimberley, which rover team scientists chose in 2013 as the location for the mission next major investigations.
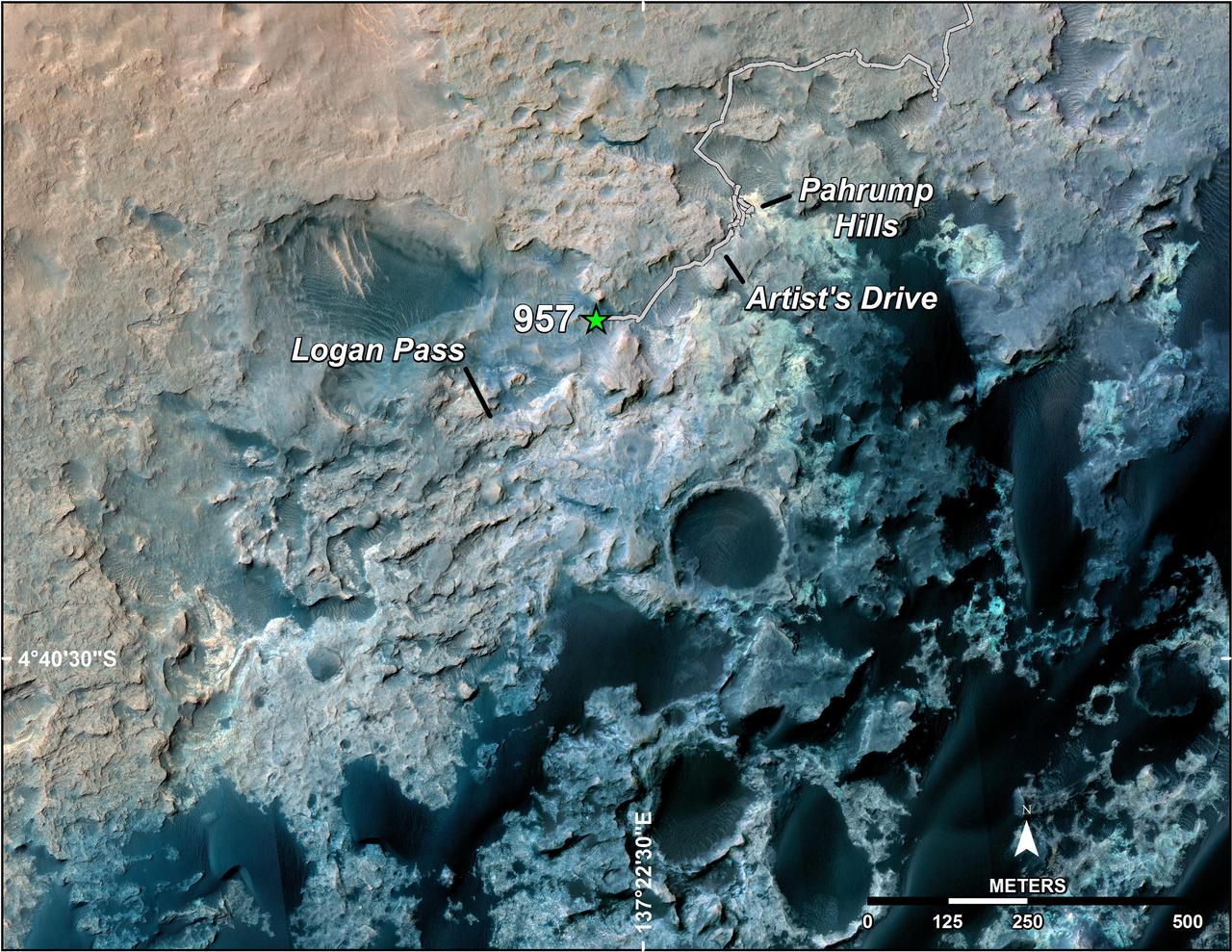
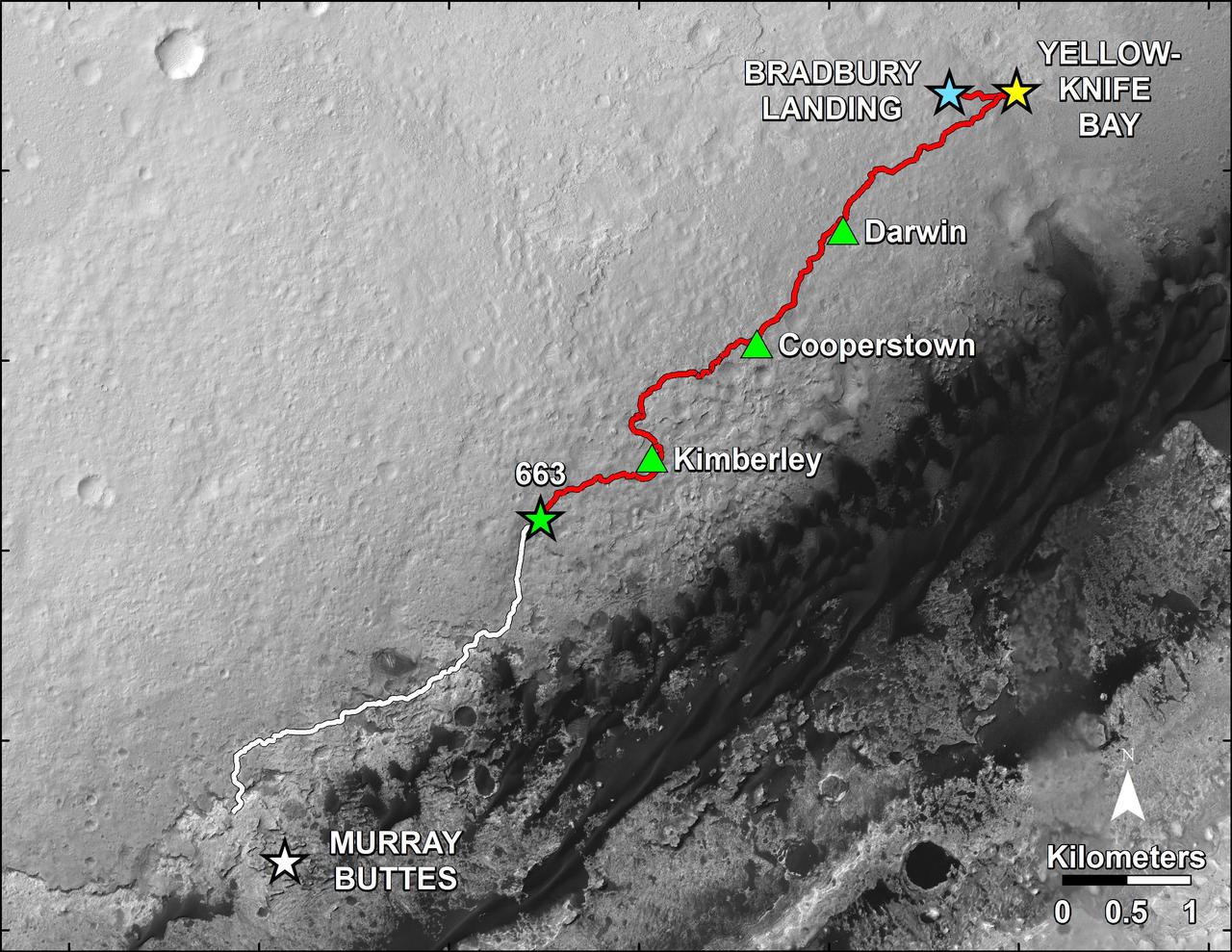
A green star marks the location of NASA's Curiosity Mars rover after a drive on the mission's 957th Martian day, or sol, (April 16, 2015). The map covers an area about 1.25 miles (2 kilometers) wide. Curiosity landed on Mars in August 2012. The drive on Sol 957 brought the mission's total driving distance past the 10-kilometer mark (6.214 miles). The rover is passing through a series of shallow valleys on a path from the "Pahrump Hills" outcrop, which it investigated for six months, toward its next science destination, called "Logan Pass." The rover's traverse line enters this map at the location Curiosity reached in mid-July 2014. The base map uses imagery from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA19390
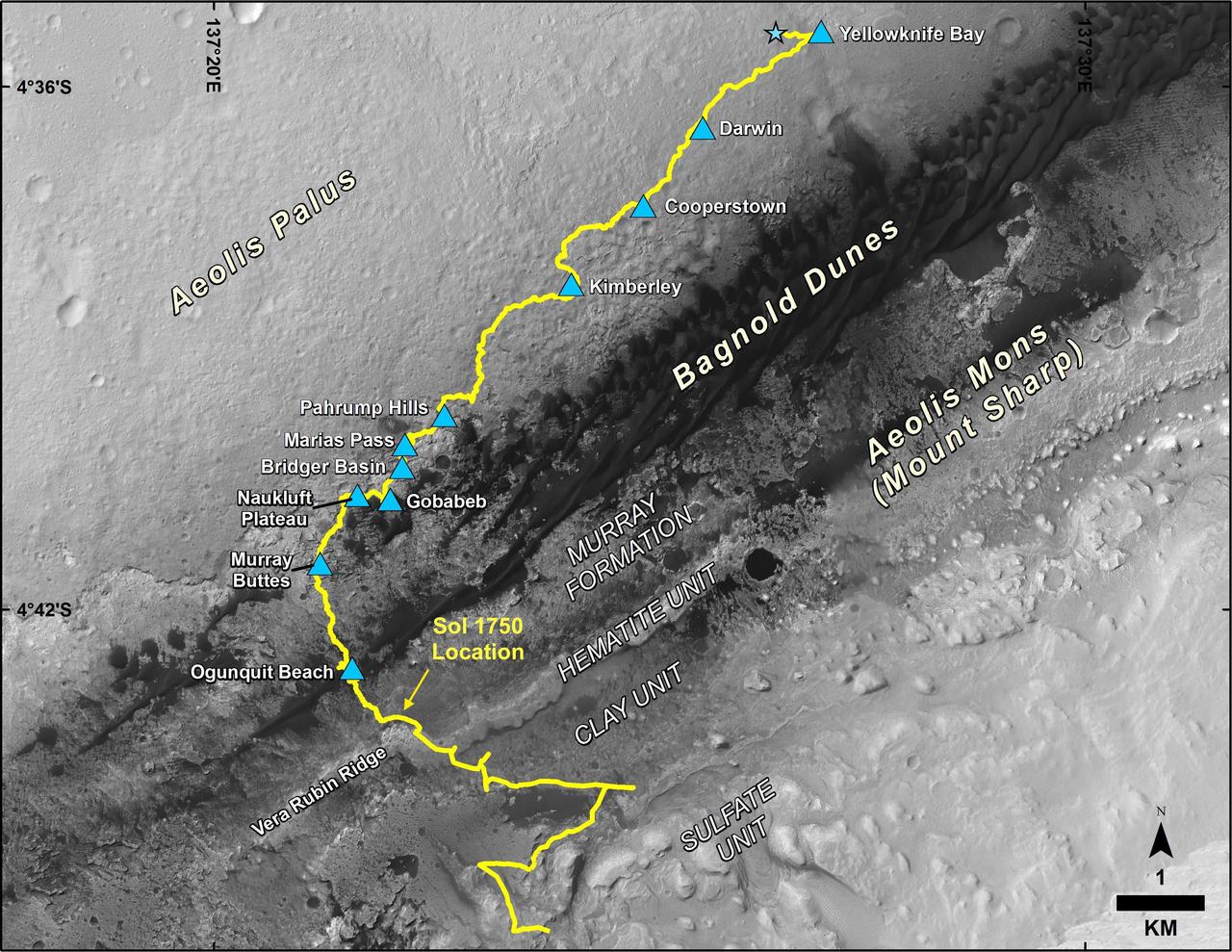
This map shows the route driven by NASA's Curiosity Mars rover, from the location where it landed in August 2012 to its location in July 2017, and its planned path to additional geological layers of lower Mount Sharp. The blue star near top center marks "Bradbury Landing," the site where Curiosity arrived on Mars on Aug. 5, 2012, PDT (Aug. 6, EDT and Universal Time). Blue triangles mark waypoints investigated by Curiosity on the floor of Gale Crater and, starting with "Pahrump Hills," on Mount Sharp. The Sol 1750 label identifies the rover's location on July 9, 2017, the 1,750th Martian day, or sol, since the landing. In July 2017, the mission is examining "Vera Rubin Ridge" from the downhill side of the ridge. Spectrometry observations from NASA's Mars Reconnaissance Orbiter have detected hematite, an iron-oxide mineral, in the ridge. Curiosity's planned route continues to the top of the ridge and then to geological units where clay minerals and sulfate minerals have been detected from orbit. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on the Mars Reconnaissance Orbiter. North is up. "Bagnold Dunes" form a band of dark, wind-blown material at the foot of Mount Sharp. https://photojournal.jpl.nasa.gov/catalog/PIA21720

This map shows the two locations of a research campaign by NASA's Curiosity Mars rover mission to investigate active sand dunes inside Gale Crater on Mars. The Bagnold Dunes form a dark band on the northwestern flank of Mount Sharp, inside the crater. In late 2015 and early 2016, Curiosity examined crescent-shaped dunes, called barchans, which are convex on the downwind (leeward) side. This was the first close-up study of active sand dunes anywhere other than Earth. In February 2017, the rover reached a location where the dunes are linear in shape, and the mission began Phase 2 of its dunes campaign. http://photojournal.jpl.nasa.gov/catalog/PIA21269
This map shows the route driven by NASA's Curiosity Mars rover from the location where it landed in August 2012 to its location in September 2016 at "Murray Buttes," and the path planned for reaching destinations at "Hematite Unit" and "Clay Unit" on lower Mount Sharp. Blue triangles mark waypoints investigated by Curiosity during the rover's two-year prime mission and first two-year extended mission. The Hematite Unit and Clay Unit are key destinations for the second two-year extension, through September 2018. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. Bagnold Dunes form a band of dark, wind-blown material at the foot of Mount Sharp. http://photojournal.jpl.nasa.gov/catalog/PIA20846
This map shows the route driven by NASA's Curiosity Mars rover from the location where it landed in August 2012 to its location in mid-November 2015, approaching examples of dunes in the "Bagnold Dunes" dune field. The traverse line covers drives completed through the 1,165rd Martian day, or sol, of Curiosity's work on Mars (Nov. 15, 2015). The base image for this map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. The dark ground south of the rover's route is the Bagnold Dunes of dark, wind-blown material at the foot of Mount Sharp. The scale bar at lower right represents two kilometers (1.2 miles). http://photojournal.jpl.nasa.gov/catalog/PIA20162
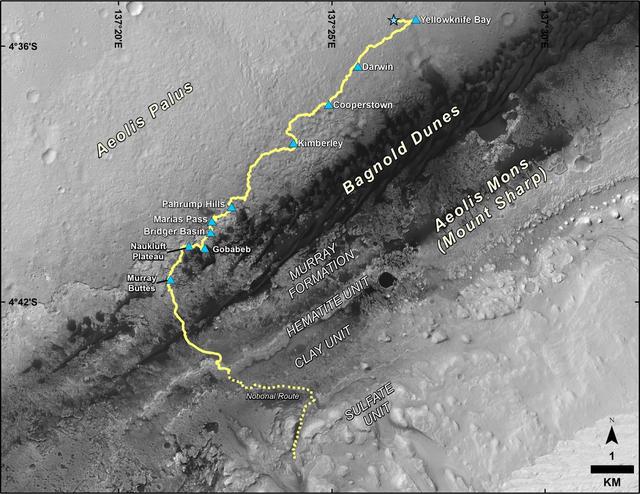
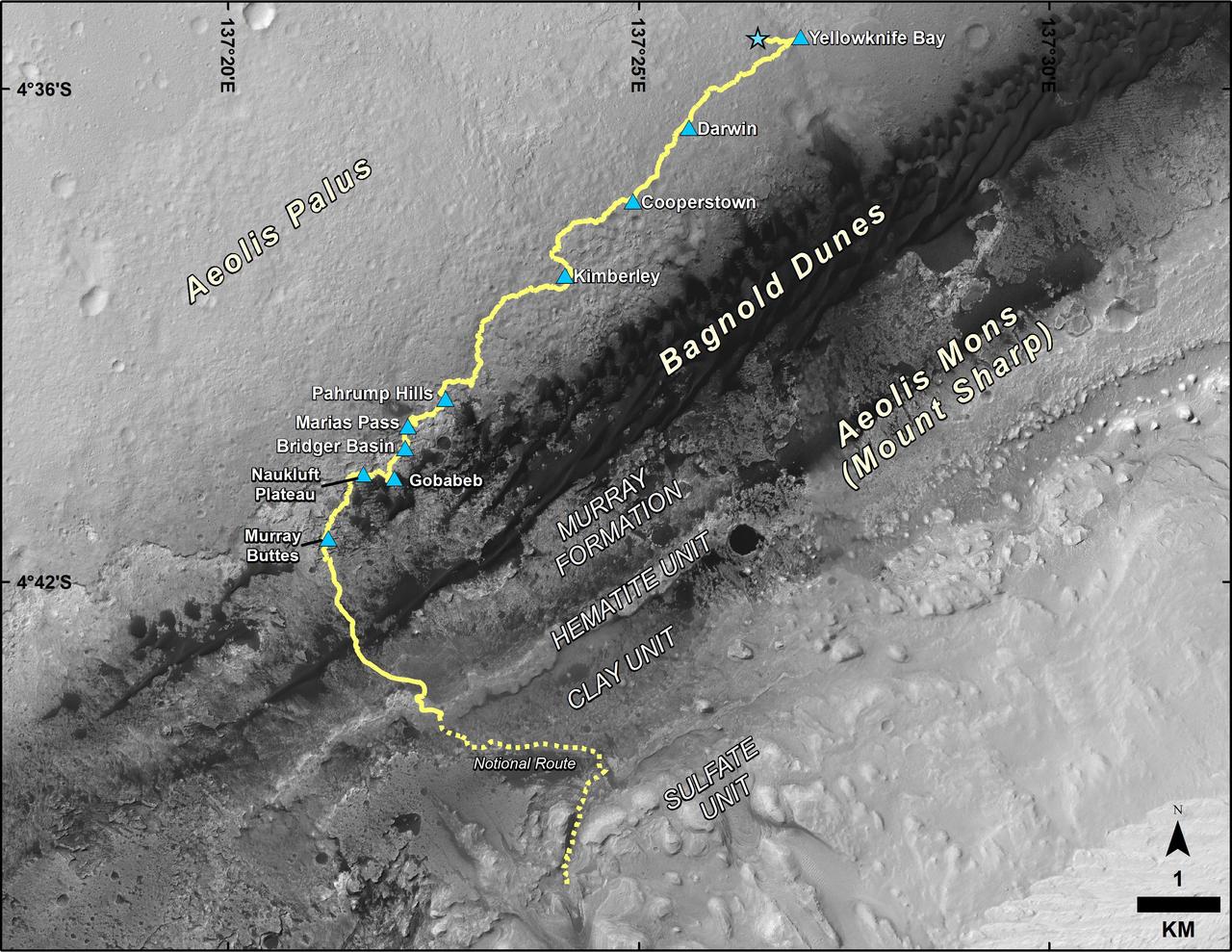
This map shows the route driven by NASA's Curiosity Mars rover from the location where it landed in August 2012 to its location in December 2016, which is in the upper half of a geological unit called the Murray formation, on lower Mount Sharp. Blue triangles mark waypoints investigated by Curiosity during the rover's two-year prime mission and first two-year extended mission. The "Hematite Unit" and "Clay Unit" are key destinations for the second two-year extension, through September 2018. An approximate possible route is indicated for studying those layers of the mountain. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. Bagnold Dunes form a band of dark, wind-blown material at the foot of Mount Sharp. The scale bar at lower right represents one kilometer (0.62 mile). http://photojournal.jpl.nasa.gov/catalog/PIA21144
This map shows in red the route driven by NASA Curiosity Mars rover from the Bradbury Landing location where it landed in August 2012 to nearly the completion of its first Martian year. The white line shows the planned route ahead.
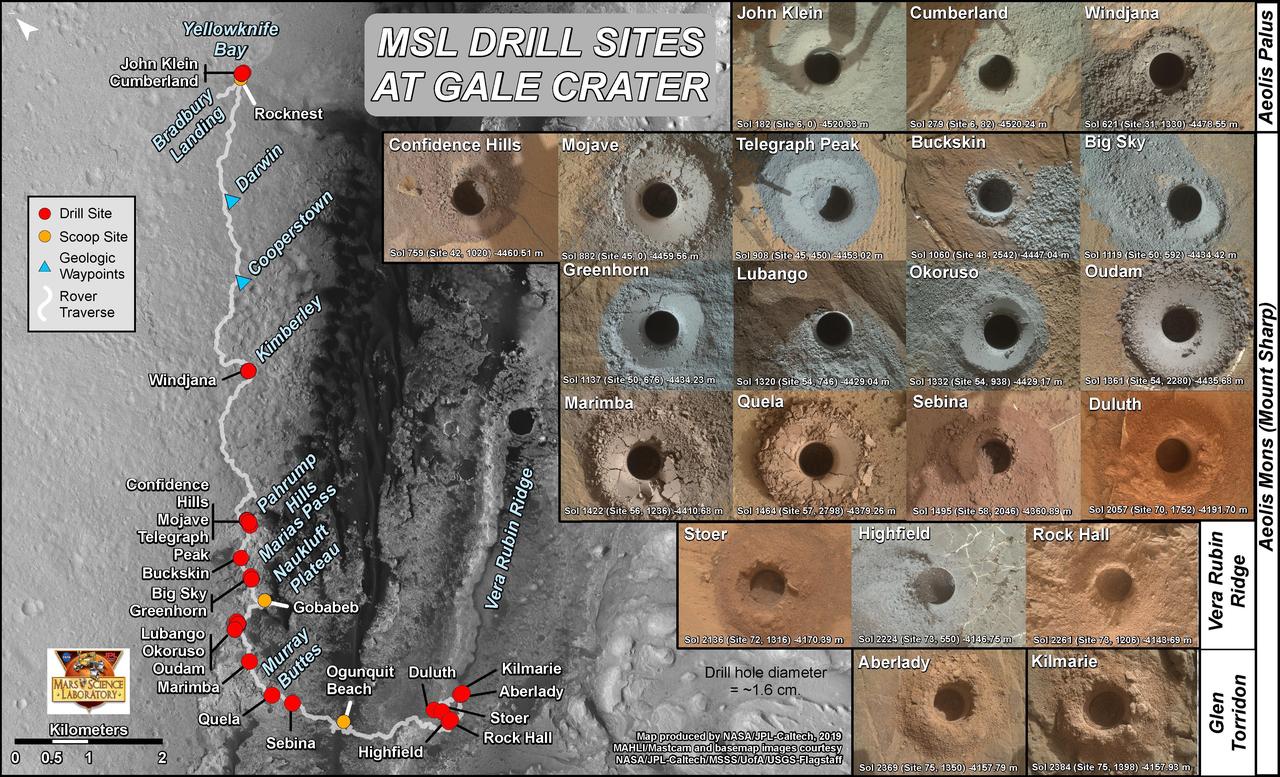
This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its rock and soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 21 rock-powder samples were acquired. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. https://photojournal.jpl.nasa.gov/catalog/PIA23413

This map shows the route driven by NASA's Curiosity Mars rover (blue line) and locations where the rover's Chemistry and Camera (ChemCam) instrument detected the element boron (dots, colored by abundance of boron according to the key at right). The main map shows the traverse from landing day (Sol 0) in August 2012 to the rover's location in September 2016, with boron detections through September 2015. The inset at upper left shows a magnified version of the most recent portion of that traverse, with boron detections during that portion. Overlapping dots represent cases when boron was detected in multiple ChemCam observation points in the same target and non-overlapping dots represent cases where two different targets in the same location have boron. Most of the mission's detections of boron have been made in the most recent seven months (about 200 sols) of the rover's uphill traverse. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. The scale bar at lower right represents one kilometer (0.62 mile). http://photojournal.jpl.nasa.gov/catalog/PIA21150
nal Caption Released with Image: This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its first 19 rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 15 rock-powder samples were acquired. Curiosity scooped two soil samples at each of the other two sites: Rocknest and Gobabeb. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward the upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. The latest sample site included is "Sebina,"where Curiosity drilled into bedrock of the Murray formation on Oct. 20, 2016, during the 1,495th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). The drilling dates for the first 13 rock samples collected are, by location: "John Klein" on Feb. 8, 2013 (Sol 182); "Cumberland" on May 19, 2013 (Sol 279); "Windjana" on May 5, 2014 (Sol 621); "Confidence Hills" on Sept. 24, 2014 (Sol 759); "Mojave" on Jan. 29, 2015 (Sol 882); "Telegraph Peak" on Feb. 24, 2015 (Sol 908); "Buckskin" on July 30, 2015 (Sol 1060); "Big Sky" on Sept. 29, 2015 (Sol 1119); "Greenhorn" on Oct. 18, 2015 (Sol 1137); "Lubango" on April 23, 2016 (Sol 1320); "Okoruso" on May 5, 2016 (Sol 1332); "Oudam" on June 4, 2016 (Sol 1361); "Quela" on Sept. 18, 2016 (Sol 1464). http://photojournal.jpl.nasa.gov/catalog/PIA21254
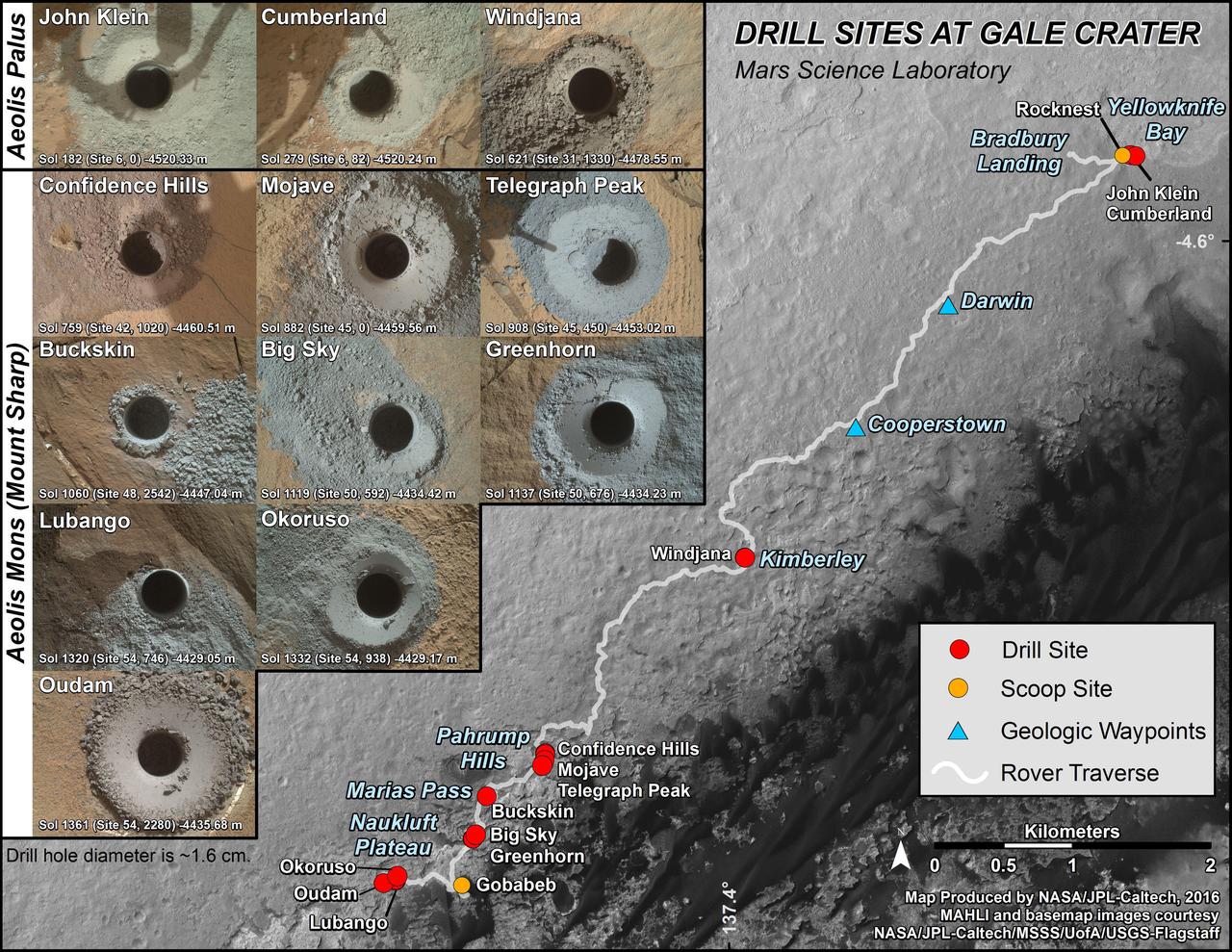
This graphic maps locations of the first 14 sites where NASA's Curiosity Mars rover collected rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 12 rock-powder samples were acquired. At the other two sites -- Rocknest and Gobabeb -- Curiosity scooped soil samples. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. The latest sample site included is "Oudam," where Curiosity drilled into mudstone of the "Murray formation" on June 4, during the 1,361th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). Dates when the first 11 drilled-rock samples were collected are: "John Klein" on Feb. 8, 2013 (Sol 182); "Cumberland" on May 19, 2013 (Sol 279); "Windjana" on May 5, 2014 (Sol 621); "Confidence Hills" on Sept. 24, 2014 (Sol 759); "Mojave" on Jan. 29, 2015 (Sol 882); "Telegraph Peak" on Feb. 24, 2015 (Sol 908); "Buckskin" on July 30, 2015 (Sol 1060); "Big Sky" on Sept. 29, 2015 (Sol 1119); "Greenhorn" on Oct. 18, 2015 (Sol 1137); "Lubango" on April 23, 2016 (Sol 1320); and "Okoruso" on May 5, 2016 (Sol 1332). http://photojournal.jpl.nasa.gov/catalog/PIA20748
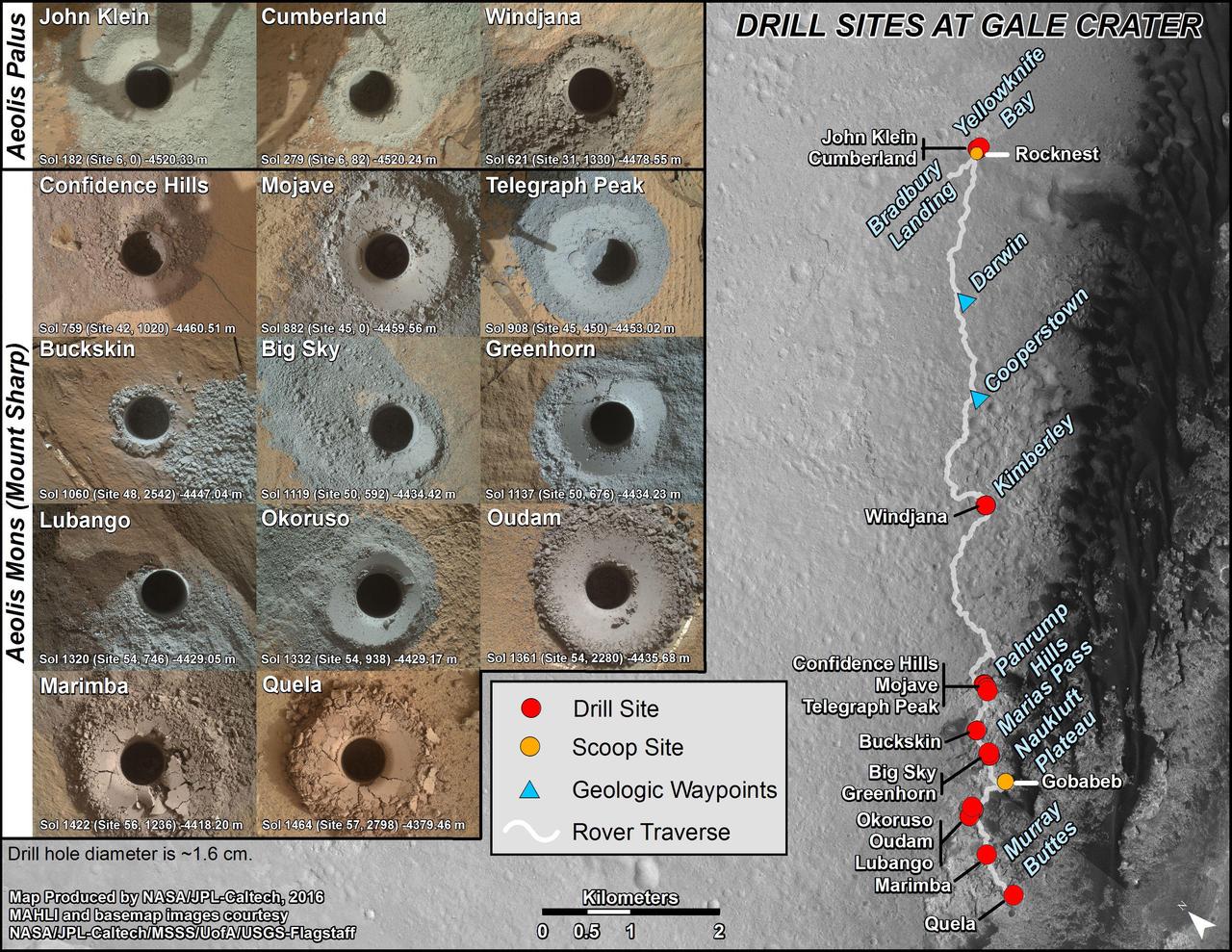
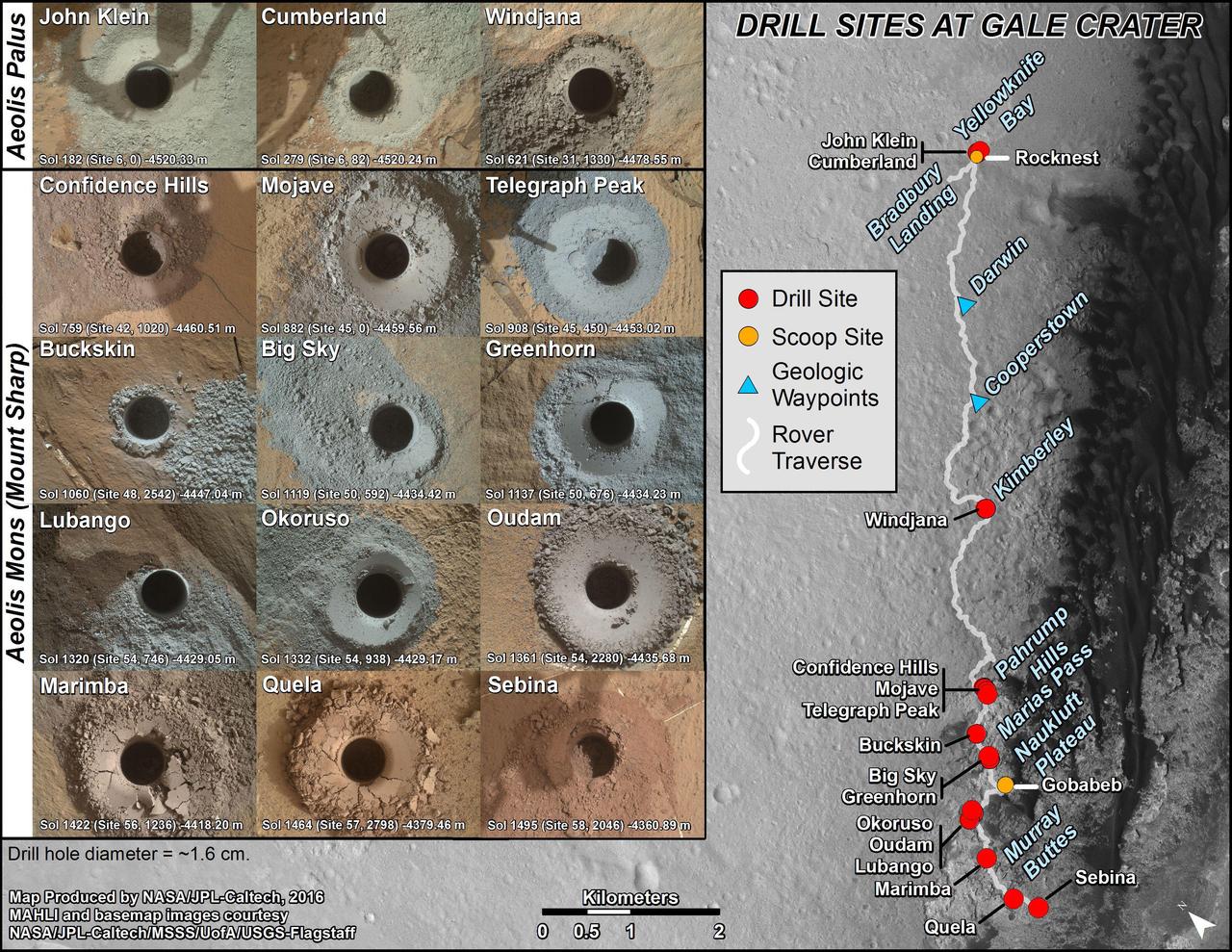
This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its first 18 rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 14 rock-powder samples were acquired. Curiosity scooped two soil samples at each of the other two sites: Rocknest and Gobabeb. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. The latest sample site included is "Quela,"where Curiosity drilled into bedrock of the Murray formation on Sept. 18, 2016, during the 1,464th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). More drilling samples collected by MSL are available at http://photojournal.jpl.nasa.gov/catalog/PIA20845
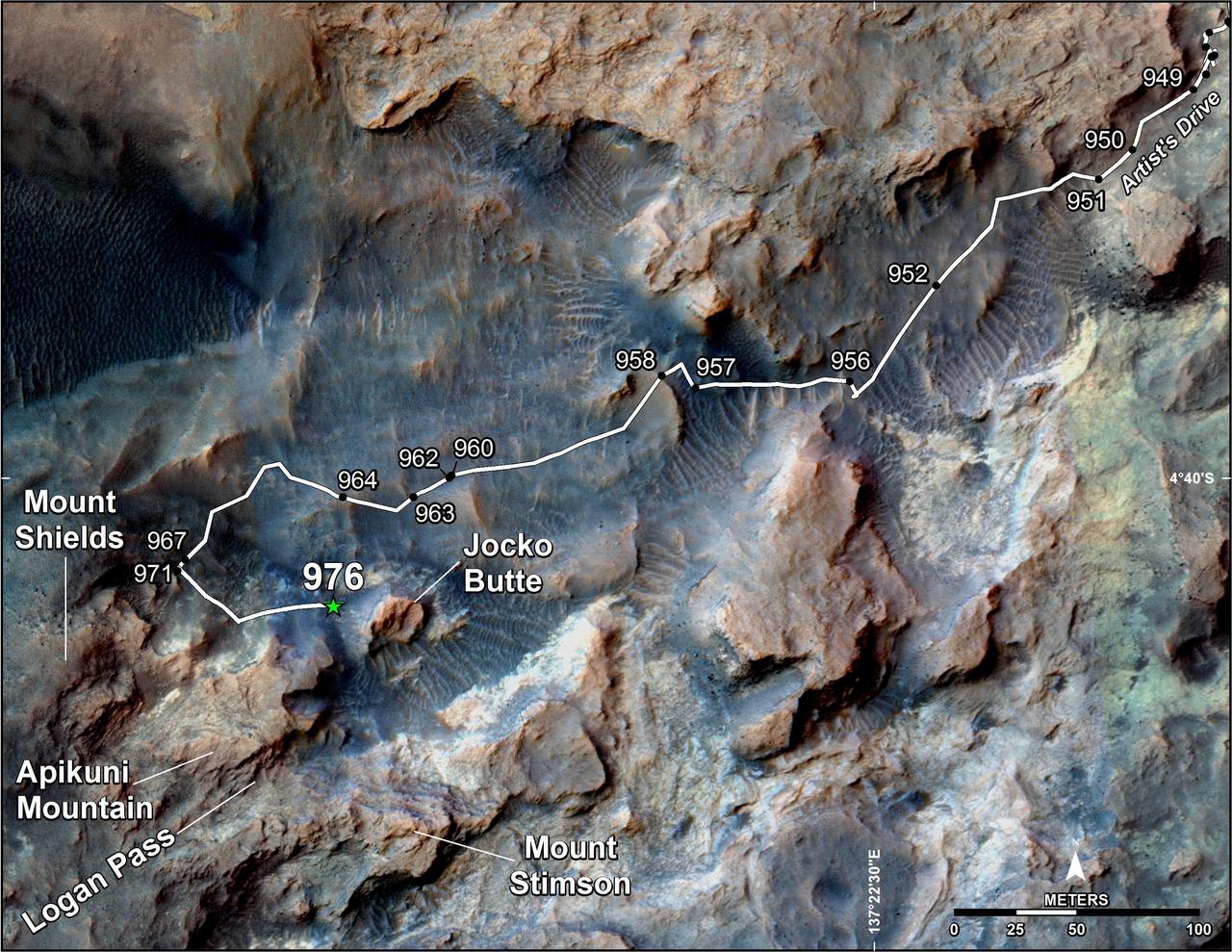
This map shows the route on lower Mount Sharp that NASA's Curiosity followed in April and early May 2015, in the context of the surrounding terrain. Numbers along the route identify the sol, or Martian day, on which it completed the drive reaching that point, as counted since its 2012 landing. The map covers an area about one-third of a mile (half a kilometer) across. North is up. The base image is from the High Resolution Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. Curiosity departed the "Pahrump Hills" outcrop -- mostly off the upper right corner of the map -- through "Artist's Drive" valley. The Sol 949 drive was completed on April 7, 2015. A HiRISE image actually showing Curiosity at that spot is at PIA19392. At that time, the rover's next planned science destination was "Logan Pass," an area where two geological units meet. At the Sol 951 location, Curiosity's Mast Camera (Mastcam) took component images for a sweeping panorama to the south and southwest, at PIA19397 and http://mars.nasa.gov/msl/multimedia/deepzoom/PIA19397. At the Sol 956 location, the Mastcam took component images for a westward panorama, at PIA19398 and http://mars.nasa.gov/msl/multimedia/deepzoom/PIA19398. From views such as these, Curiosity's science team selected an additional site for close inspection, at the base of a rise called "Mount Shields." The rover arrived there with the Sol 967 drive, completed on April 26, 2015. After the observations and measurements made by Curiosity's instruments at the base of Mount Shields, the rover resumed its approach to Logan Pass, on a route passing west of "Jocko Butte." The Sol 976 drive was completed on May 5, 2015. http://photojournal.jpl.nasa.gov/catalog/PIA19399
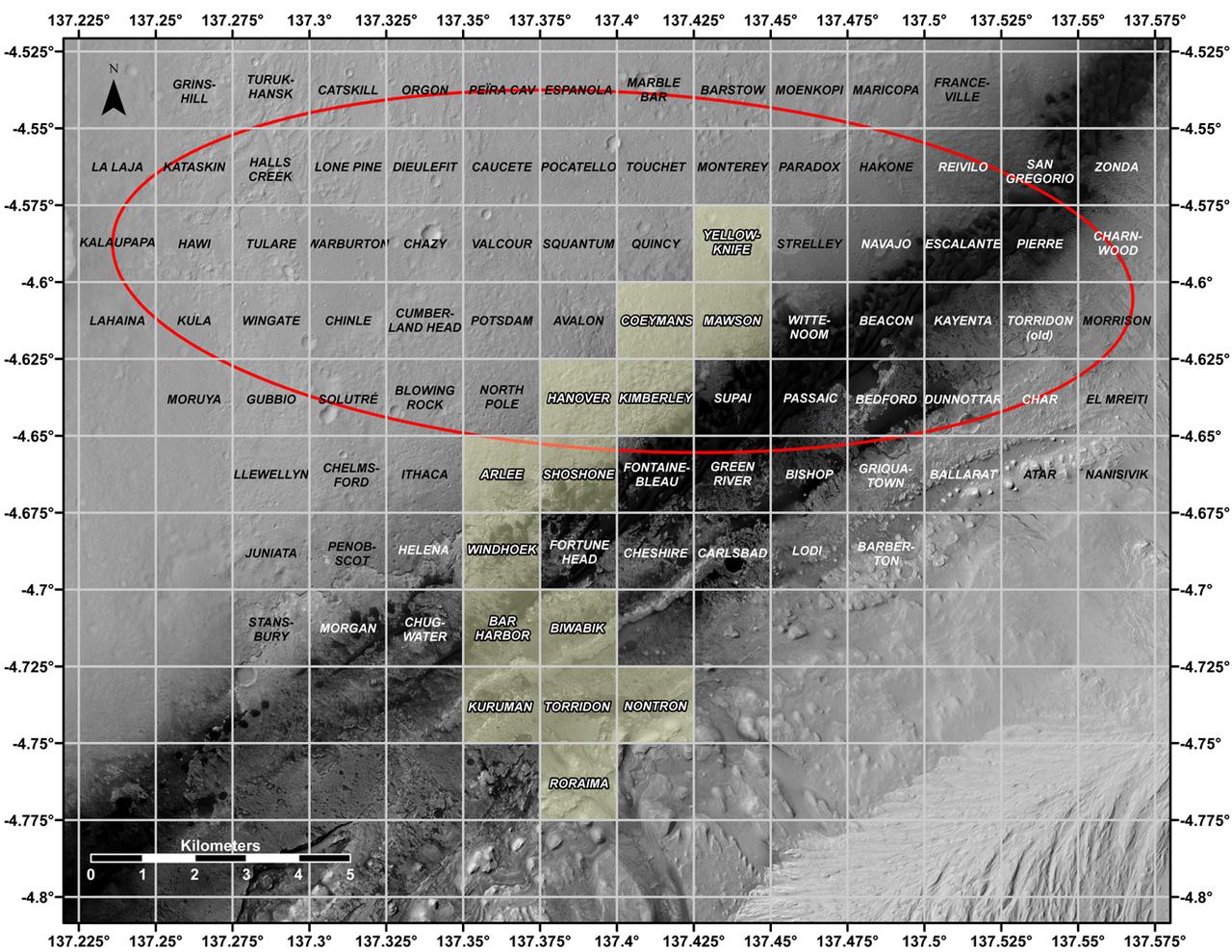
This map shows all the quadrant themes for NASA's Curiosity Mars rover, which is currently in the Roraima quadrant seen at the bottom. The red oval indicates the landing ellipse where the rover was targeted to touch down in 2012. The yellow-tinted quadrants are areas the rover has driven through since then. Themes are chosen in advance of the rover's arrival in a new quadrant; the rover's path couldn't be planned until after the team knew where it landed. Martian latitude and longitude is provided around the outside of the map. With the Curiosity mission, scientists began using quadrant themes to organize the long lists of unofficial nicknames needed to catalog its observations, whether hills, craters, boulders, rocks, and even tiny features on rock surfaces. Scientist deplete these lists of names quickly – especially with Curiosity, which has used more than 10,000 names over nearly 11 years of exploring Mars. Different science "targets" all require names – including targets for the rover's cameras, the rocks on which it places its arm instruments and drill, and the surfaces it zaps with its laser instrument. Curiosity's team chooses quadrant themes based on sites of geological interest on Earth. Its current quadrant, Roraima, is named for the northernmost state of Brazil, and for Mount Roraima, the highest peak in the Pacaraima mountains, located near the border of Venezuela, Brazil, and Guyana. The sulfate-enriched region Curiosity is currently exploring, with its flat-topped hills and steep slopes, reminded the rover team of the "table-top" mountains in the Pacaraima range. This is the first quadrant theme the team has chosen related to South America. Previously explored quadrants include Torridon, based on sites in Scotland, and Nontron, based on the French region where the town of Nontron can be found. While in the Nontron quadrant, which was located in a clay-enriched region, Curiosity drilled a rock sample that included a notable amount of nontronite – a clay mineral that was first discovered on Earth near Nontron. Each quadrant is 0.025 degrees of latitude and longitude, or approximately 0.7 miles (1.2 kilometers) on each side. https://photojournal.jpl.nasa.gov/catalog/PIA25914
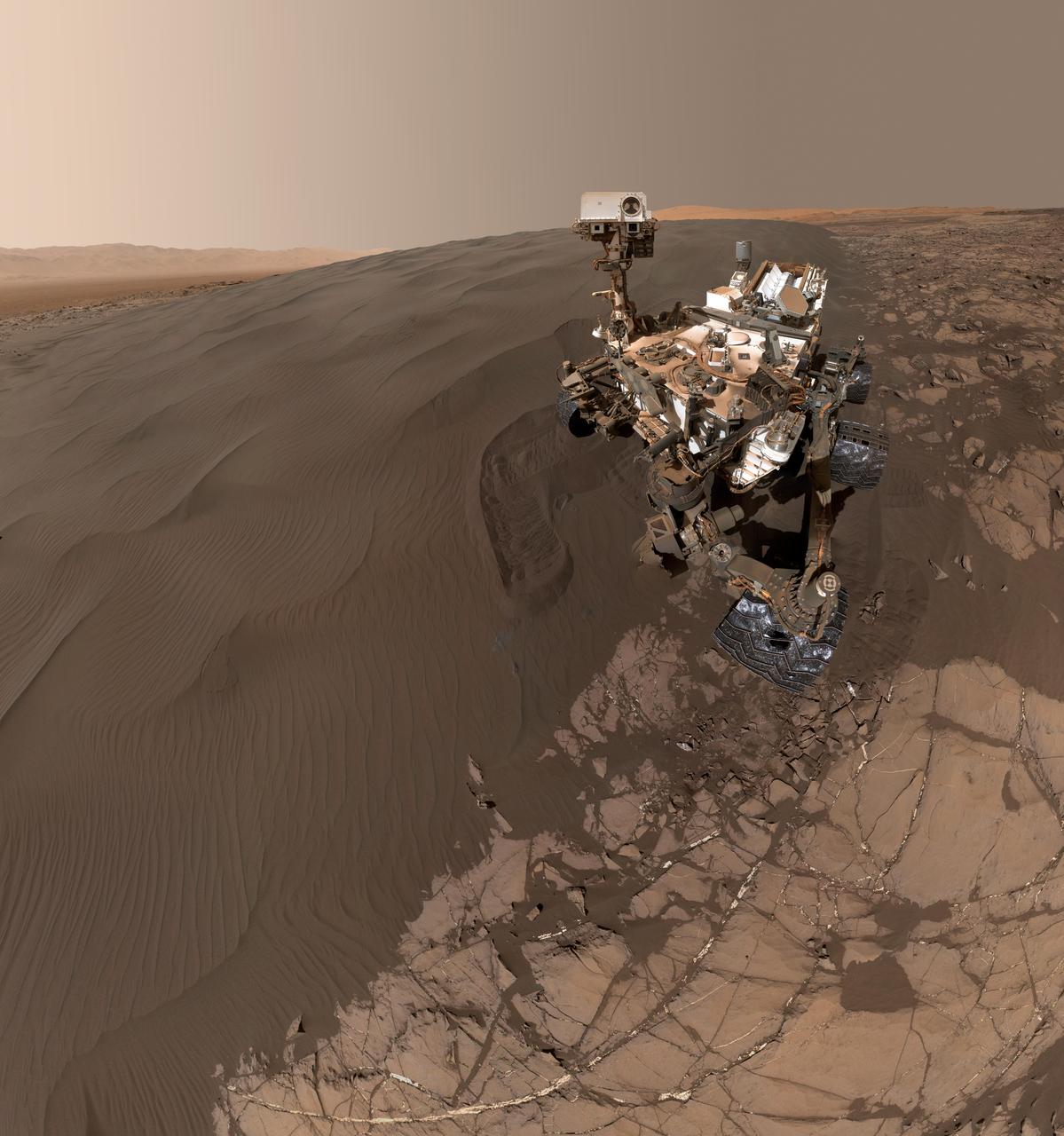
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at "Namib Dune," where the rover's activities included scuffing into the dune with a wheel and scooping samples of sand for laboratory analysis. The scene combines 57 images taken on Jan. 19, 2016, during the 1,228th Martian day, or sol, of Curiosity's work on Mars. The camera used for this is the Mars Hand Lens Imager (MAHLI) at the end of the rover's robotic arm. Namib Dune is part of the dark-sand "Bagnold Dune Field" along the northwestern flank of Mount Sharp. Images taken from orbit have shown that dunes in the Bagnold field move as much as about 3 feet (1 meter) per Earth year. The location of Namib Dune is show on a map of Curiosity's route at http://mars.nasa.gov/msl/multimedia/images/?ImageID=7640. The relationship of Bagnold Dune Field to the lower portion of Mount Sharp is shown in a map at PIA16064. The view does not include the rover's arm. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390) and "Buckskin" (PIA19807). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Other Curiosity self-portraits are available at http://photojournal.jpl.nasa.gov/catalog/PIA20316
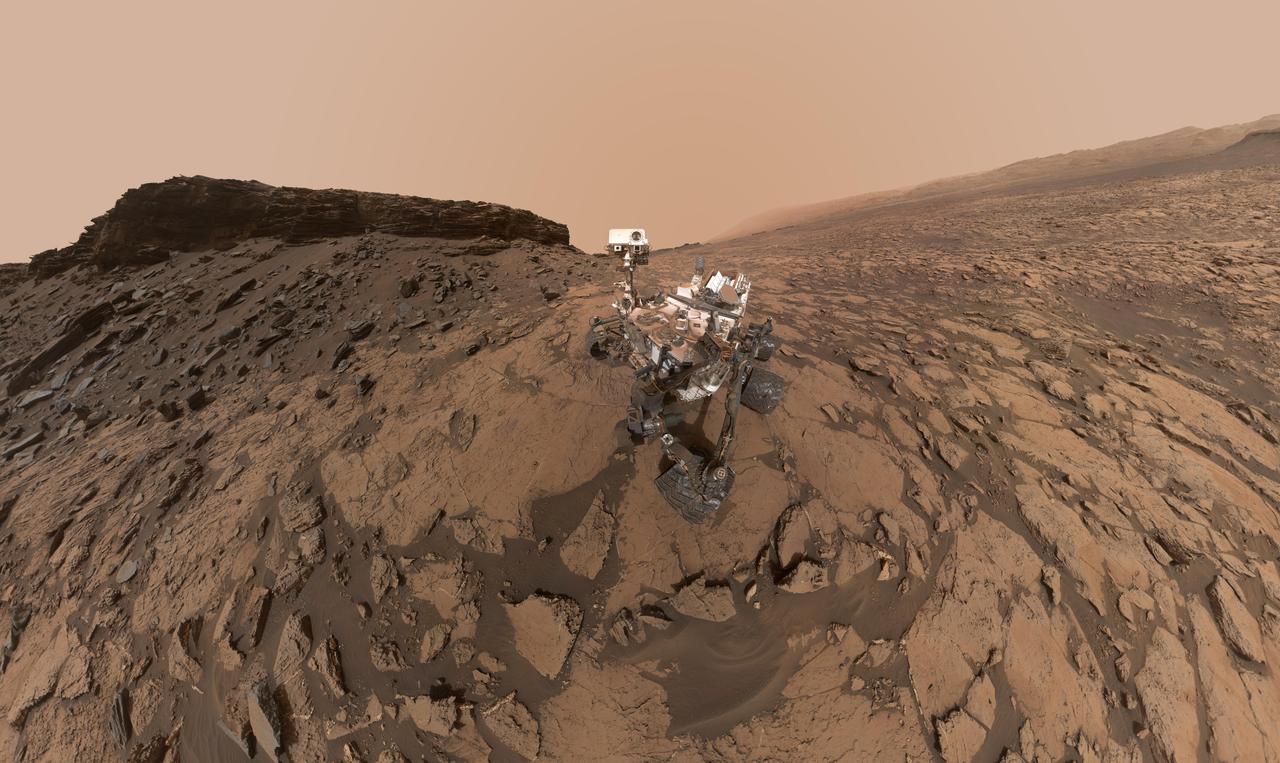
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Quela" drilling location in the "Murray Buttes" area on lower Mount Sharp. Key features on the skyline of this panorama are the dark mesa called "M12" to the left of the rover's mast and pale, upper Mount Sharp to the right of the mast. The top of M12 stands about 23 feet (7 meters) above the base of the sloping piles of rocks just behind Curiosity. The scene combines approximately 60 images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover's robotic arm. Most of the component images were taken on Sept. 17, 2016, during the 1,463rd Martian day, or sol, of Curiosity's work on Mars. Two component images of the drill-hole area in front of the rover were taken on Sol 1466 (Sept. 20) to show the hole created by collecting a drilled sample at Quela on Sol 1464 (Sept. 18). The skyline sweeps from west on the left to south-southwest on the right, with the rover's mast at northeast. The rover's location when it recorded this scene was where it ended a drive on Sol 1455, mapped at http://mars.nasa.gov/msl/multimedia/images/?ImageID=8029. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at other sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390"), "Buckskin" (PIA19808) and "Gobabeb" (PIA20316). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. http://photojournal.jpl.nasa.gov/catalog/PIA20844
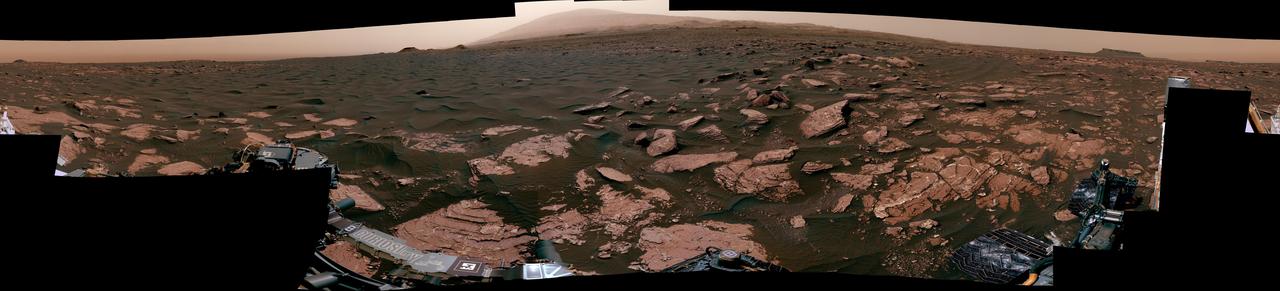
This 360-degree panorama from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows the surroundings of a site on lower Mount Sharp where the rover spent its 1,000th Martian day, or sol, on Mars. Sol 1,000 of Curiosity's Mars-surface mission corresponded to May 30, 2015. The component images for this scene were taken on Sol 997 (May 27, 2015). The site is a valley just below "Marias Pass" on lower Mount Sharp. A map of the area is at http://mars.nasa.gov/msl/images/Curiosity_Location_Sol997-full.jpg. Tracks from the rover's drive to this site are visible at right. The rover team chose this location near Marias Pass because images from orbit showed what appeared to be a contact between two types of bedrock. The two types are evident in this panorama. The bedrock close to the rover is pale mudstone similar to what Curiosity examined in 2014 and early 2015 at "Pahrump Hills." The darker, finely bedded bedrock above it is sandstone that the rover team calls the "Stimson" unit. The largest-looking slab of Stimson sandstone in the image, in the lower left quadrant, is a target called "Ronan," selected for close-up inspection. http://photojournal.jpl.nasa.gov/catalog/PIA19679
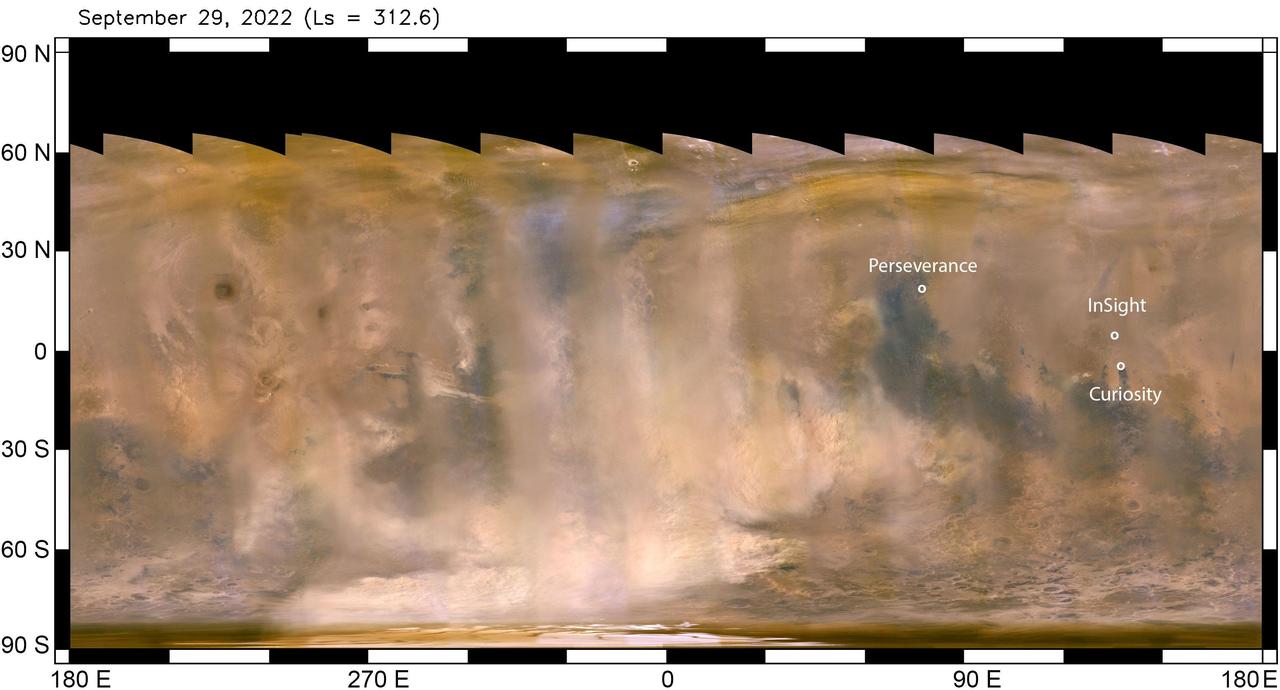
The beige clouds seen in this flat global map of Mars are a continent-size dust storm captured on Sept. 29, 2022 by the Mars Color Imager (MARCI) camera aboard NASA's Mars Reconnaissance Orbiter (MRO). As MRO passes over the planet, MARCI takes linear images – essentially strips – of the planet's circumference each day. The images are then stitched together to create a daily global map of the planet, showing atmospheric features across the planet as seen at the same time of day (mid-afternoon). Comparison of daily maps show atmospheric changes over time. Besides providing unique scientific data, MARCI's global maps are useful for monitoring weather changes that could affect NASA's surface missions. The agency's Perseverance, Curiosity, and InSight missions are also labeled, showing the vast distances between them. NASA's Perseverance rover and Ingenuity helicopter, are located at the white dot farthest north, roughly 2,147 miles (3,455 kilometers) from the agency's InSight lander, just above the equator. The Curiosity rover is just below the equator, about 373 miles (600 kilometers) from InSight. Neither Curiosity nor Perseverance and Ingenuity (the helicopter must remain relatively close to Perseverance, which serves as its base station) can travel the distance to the solar-powered InSight lander. The regional dust storm in this map was first observed Sept. 21. By the time these images were taken (Sept. 29), it had expanded considerably. Within the following week, the storm appeared to have entered its decay phase, when it's no longer lifting dust into the atmosphere. At that point, the dust that has already been lofted into the atmosphere and spread far beyond the dust-raising sector can take weeks to settle back to the surface. While this particular storm was roughly 2,175 miles (3,500 kilometers) from InSight, it lofted enough dust to significantly reduce the energy being produced by the lander's solar arrays, which have become covered by dust since the spacecraft landed in November 2018. The lander has long since surpassed its primary mission. With its power steadily declining, it is now close to the end of its extended mission, conducting "bonus science" by measuring marsquakes, which reveal details about the deep interior of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA25412
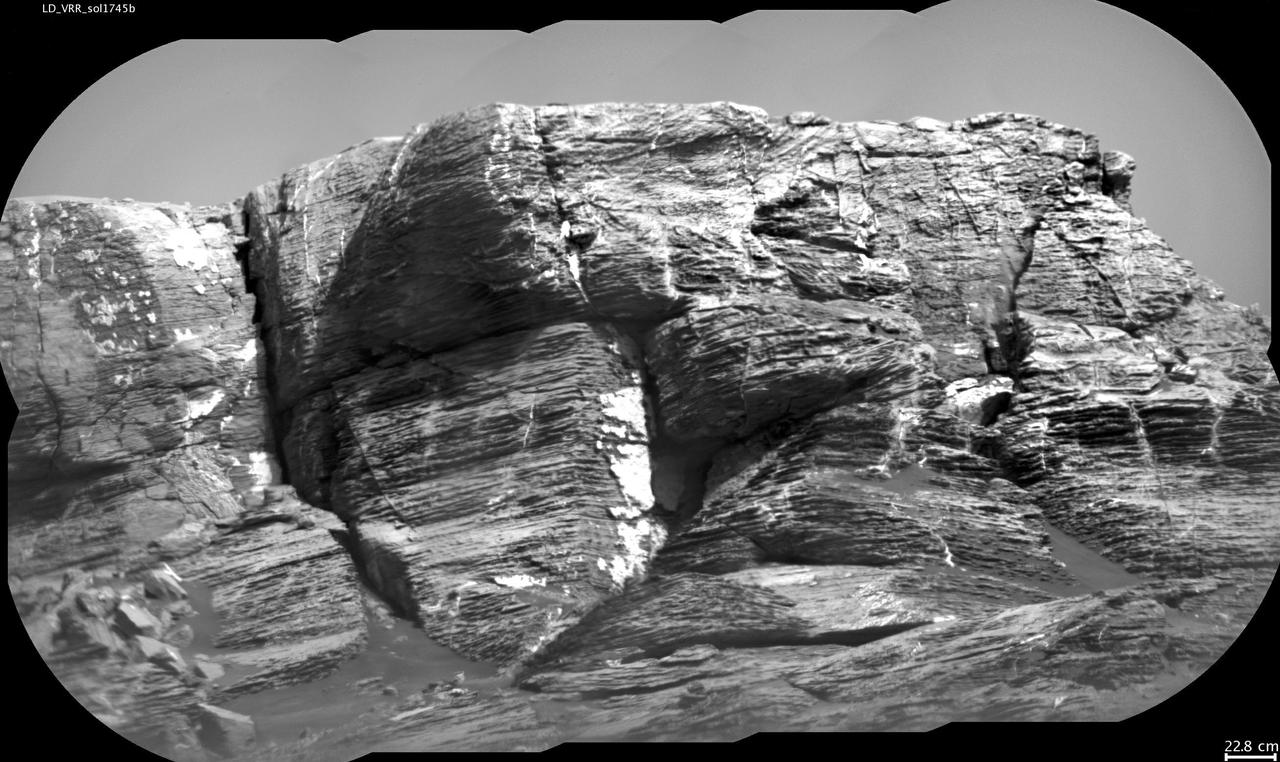
This view of "Vera Rubin Ridge" from the Chemistry and Camera (ChemCam) instrument on NASA's Curiosity Mars rover shows multiple sedimentary layers and fracture-filling deposits of minerals. Buried layers of what is now a ridge became fractured, and the fractures were filled with mineral deposits precipitated from underground fluids that moved through the fractures. ChemCam's telescopic Remote Micro-Imager took the 10 component images of this mosaic on July 3, 2017, during the 1,745th Martian day, or sol, of Curiosity's work on Mars. The camera was about 377 feet (115 meters) away from the pictured portion of the ridge. The rover's location at the time, shown in a Sol 1741 traverse map, was west of the place where it began its ascent up the ridge about two months later. The scale bar at lower right indicates how wide a feature 9 inches (22.8 centimeters) in width would look in the middle portion of the scene. https://photojournal.jpl.nasa.gov/catalog/PIA21852
The two prominent mesas in this view of Mars' "Murray Buttes" region from NASA's Curiosity Mars rover are about 260 feet (about 80 meters) apart. The top of the one on the left is about 26 feet (about 8 meters) above the surrounding plain and about 330 feet (about 100 meters) from Curiosity's position when the rover acquired this view on Aug. 18, 2016, during the 1,434th Martian day, or sol, of its work Mars. The component images of this mosaic were taken by the right-eye camera of the rover's Mast Camera (Mastcam), which has a telephoto lens. The mesa on the right is about 33 feet (about 10 meters) high. The top of it is about 270 feet (about 82 meters) from the rover. Upper Mount Sharp is the salmon-hued mound dominating the horizon between the scene's two prominent mesas. The left edge of this view is east-northeast from the rover; the right edge is southeast. The rover's location when it recorded this scene was the site it reached in its Sol 1433 drive. (See map at http://mars.nasa.gov/msl/multimedia/images/?ImageID=7999.) The scene is presented with a color adjustment that approximates white balancing, to resemble how the rocks and sand would appear under daytime lighting conditions on Earth. http://photojournal.jpl.nasa.gov/catalog/PIA20841
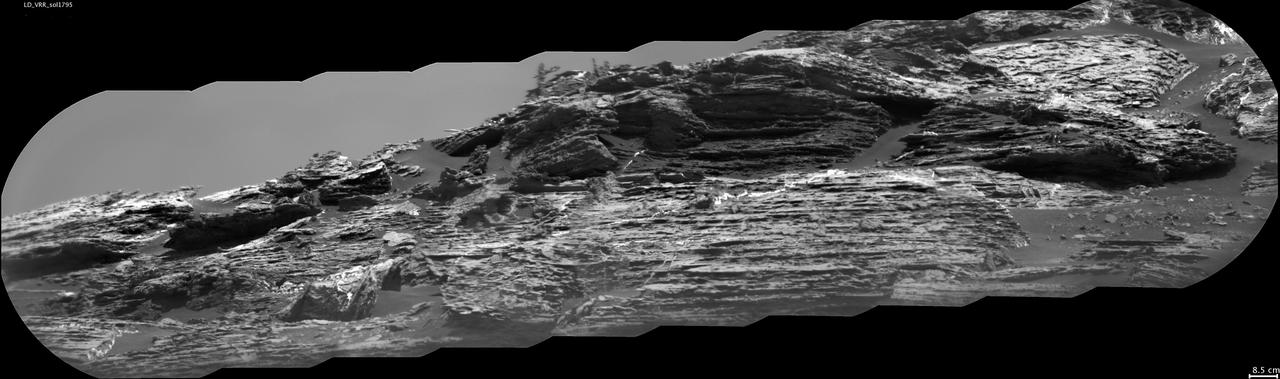
This view of "Vera Rubin Ridge" from the Chemistry and Camera (ChemCam) instrument on NASA's Curiosity Mars rover shows sedimentary layers, mineral veins and effects of wind erosion. This area of lower Mount Sharp became a ridge by being more resistant to erosion than neighboring portions of the layered mountain. Here, the wind has eroded portions of the outcrop in unusual ways, so that elongated rock fragments can be seen protruding into the sky. ChemCam's telescopic Remote Micro-Imager took the 10 component images of this mosaic on Aug. 24, 2017, during the 1,795th Martian day, or sol, of Curiosity's work on Mars. The camera was about 141 feet (43 meters) away from the pictured portion of the ridge. The rover's location at the time, in relation to the ridge, is shown in a Sol 1794 traverse map. The scale bar at lower right indicates how wide a feature 3.3 inches (8.5 centimeters) in width would look in the middle portion of the scene. https://photojournal.jpl.nasa.gov/catalog/PIA21853
The top of the butte in this scene from the Mast Camera (Mastcam) on NASA's Curiosity Mars rover stands about 16 feet (about 5 meters) above the rover and about 82 feet (about 25 meters) east-southeast of the rover. Mastcam's right-eye (telephoto-lens) camera took the component images of this mosaic on Sept. 1, 2016, during the 1,448th Martian day, or sol, of Curiosity's work on Mars. The site is in the scenic "Murray Buttes" area, where individual buttes and mesas were assigned numbers. This one is "M9a." The average slope on the prominent ridge on the left side is more than 40 degrees, while the average slope on the right side of the highest point is about 30 degrees. The rover's location when it recorded this scene was the site it reached in its Sol 1446 drive. (See map at http://mars.nasa.gov/msl/multimedia/images/?ImageID=8009.) The scene is presented with a color adjustment that approximates white balancing, to resemble how the rocks and sand would appear under daytime lighting conditions on Earth. http://photojournal.jpl.nasa.gov/catalog/PIA20843
This 360-degree mosaic from the Mast Camera (Mastcam) on NASA's Curiosity Mars rover looks out over a portion of the Bagnold Dunes, which stretch for several miles. From early February to early April 2017, the rover examined four sites near linear dunes for comparison with what it found in late 2015 and early 2016 during its investigation of crescent-shaped dunes. The dark, rippled surface of a linear dune is visible at the center of the view and receding into the distance to the left. The bedrock of the Murray formation, made from sediments deposited in lakes billions of years ago, is in the foreground, along with some components of the rover. The location, called "Ogunquit Beach," is on the northwestern flank of lower Mount Sharp. Northwest is at both ends of this full-circle panorama; southeast is at the center, where a higher portion of Mount Sharp dominates the horizon. Among the questions this Martian dune campaign is addressing is how winds shape the dunes into different patterns. Others include whether Martian winds sort grains of sand in ways that affect the distribution of mineral compositions, which also would have implications for studies of Martian sandstones. The 115 individual images that were combined into this mosaic were acquired by the Mastcam's left-eye camera on March 24 and March 25, 2017, (PST) during the 1,647th Martian day, or sol, of Curiosity's work on Mars. This mosaic is white-balanced so that the colors of the colors of the rock and sand materials resemble how they would appear under daytime lighting conditions on Earth. The rover's position on Sol 1647 is shown at https://mars.nasa.gov/multimedia/images/2017/curiositys-traverse-map-through-sol-1646 as the location reached by a drive on Sol 1646. https://photojournal.jpl.nasa.gov/catalog/PIA11241
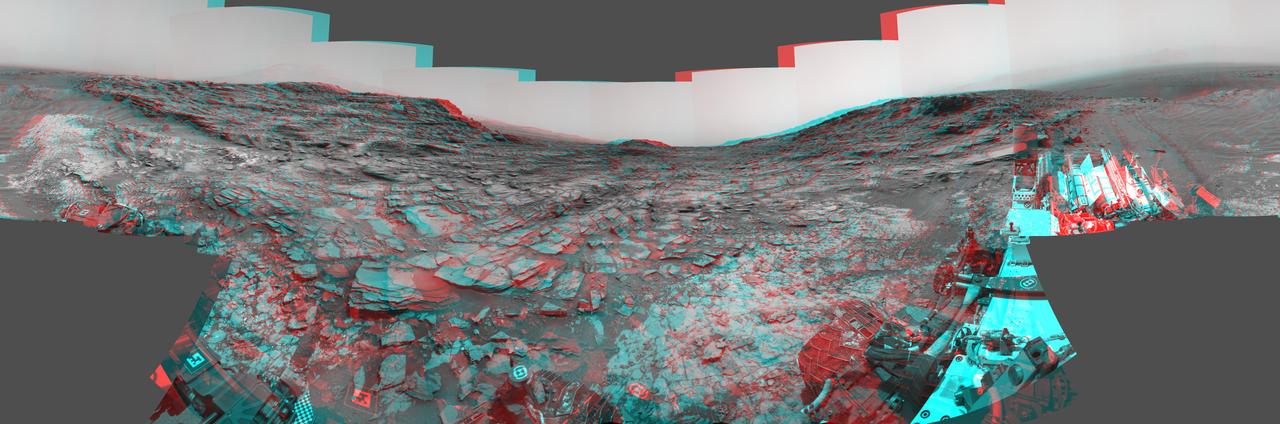
This stereo view from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows a 360-degree panorama around the location where the rover spent its 1,000th Martian day, or sol, on Mars. The image appears three-dimensional when viewed through red-blue glasses with the red lens on the left. Sol 1,000 of Curiosity's Mars-surface mission corresponded to May 30, 2015. The component images for this scene were taken on Sol 997 (May 27, 2015). The site is a valley just below "Marias Pass" on lower Mount Sharp. A map of the area is at http://mars.nasa.gov/msl/images/Curiosity_Location_Sol997-full.jpg. The center of the scene is toward the south, with north at both ends. This stereo view combines images from Navcam left-eye and right-eye cameras. A single-eye version of the scene is at PIA19679 . Tracks from the rover's drive to this site are visible at right. The rover team chose this location near Marias Pass because images from orbit showed what appeared to be a contact between two types of bedrock. The two types are evident in this panorama. The bedrock close to the rover is pale mudstone similar to what Curiosity examined in 2014 and early 2015 at "Pahrump Hills." The darker, finely bedded bedrock above it is sandstone that the rover team calls the "Stimson" unit. The largest-looking slab of Stimson sandstone in the image, in the lower left quadrant, is a target called "Ronan," selected for close-up inspection. on lower Mount Sharp. http://photojournal.jpl.nasa.gov/catalog/PIA19678

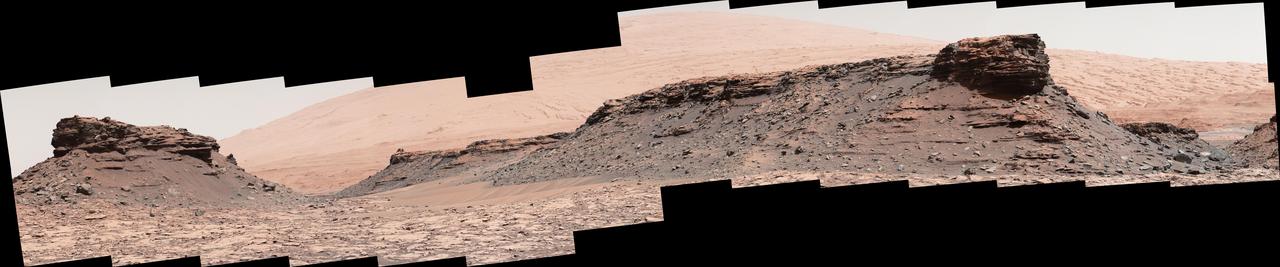
"Vera Rubin Ridge," a favored destination for NASA's Curiosity Mars rover even before the rover landed in 2012, rises near the rover nearly five years later in this panorama from Curiosity's Mast Camera (Mastcam). The scene combines 23 images taken with the Mastcam's right-eye, telephoto-lens camera, on June 22, 2017, during the 1,734th Martian day, or sol, of Curiosity's work on Mars. The rover began ascending the ridge in September 2017. This and other Mastcam panoramas show details of the sedimentary rocks that make up the "Vera Rubin Ridge." This distinct topographic feature located on the lower slopes of Mount Sharp (Aeolis Mons) is characterized by the presence of hematite, an iron-oxide mineral, which has been detected from orbit. The Mastcam images show that the rocks making up the lower part of the ridge are characterized by distinct horizontal stratification with individual rock layers of the order of several inches (tens of centimeters) thick. Scientists on the mission are using such images to determine the ancient environment these rocks were deposited in. The repeated beds indicate progressive accumulation of sediments that now make up the lower part of Mount Sharp, although from this distance it is not possible to know if they were formed by aqueous or wind-blown processes. Close-up images collected as the rover climbs the ridge will help answer this question. The stratified rocks are cross cut by veins filled with a white mineral, likely calcium sulfate, that provide evidence of later episodes of fluid flow through the rocks. The panorama has been white-balanced so that the colors of the rock materials resemble how they would appear under daytime lighting conditions on Earth. It spans about 65 compass degrees, centered toward the south-southeast. Higher portions of Mount Sharp are visible at upper left. The Sol 1734 location just north of the ridge is shown in a Sol 1732 traverse map. An annotated figure is shown at https://photojournal.jpl.nasa.gov/catalog/PIA21849

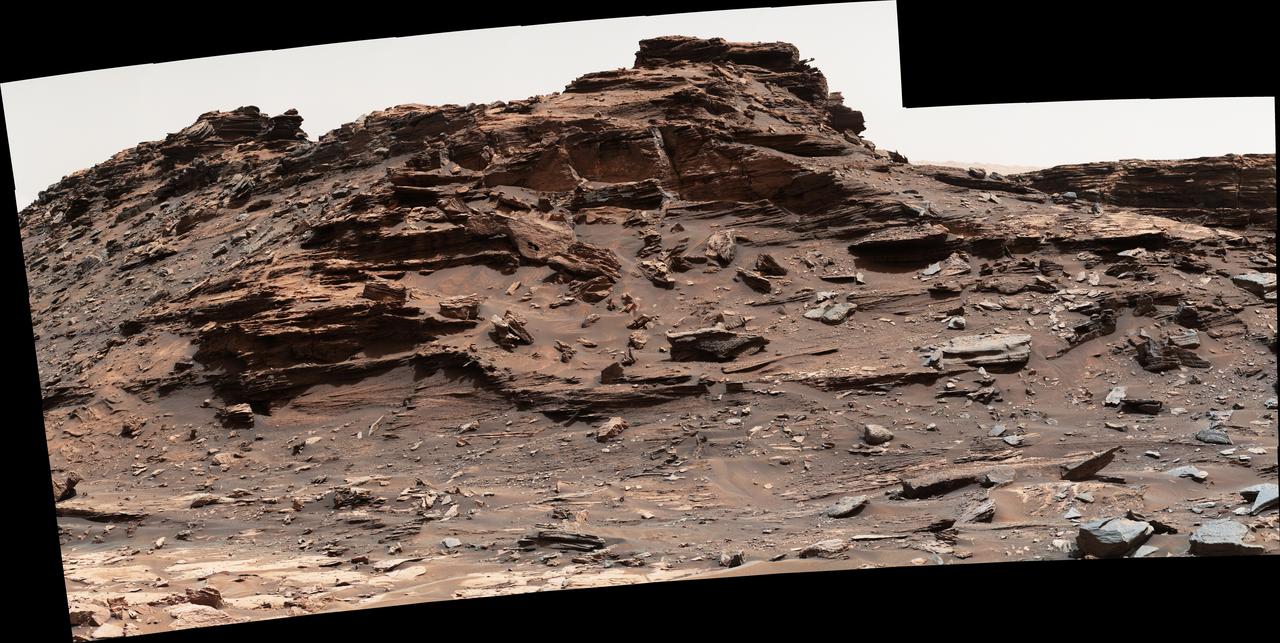
Researchers used the Mast Camera (Mastcam) on NASA's Curiosity Mars rover to gain this detailed view of layers in "Vera Rubin Ridge" from just below the ridge. The scene combines 70 images taken with the Mastcam's right-eye, telephoto-lens camera, on Aug. 13, 2017, during the 1,785th Martian day, or sol, of Curiosity's work on Mars. This and other Mastcam panoramas show details of the sedimentary rocks that make up the "Vera Rubin Ridge." This distinct topographic feature located on the lower slopes of Mount Sharp (Aeolis Mons) is characterized by the presence of hematite, an iron-oxide mineral, which has been detected from orbit. The Mastcam images show that the rocks making up the lower part of the ridge are characterized by distinct horizontal stratification with individual rock layers of the order of several inches (tens of centimeters) thick. Scientists on the mission are using such images to determine the ancient environment these rocks were deposited in. The repeated beds indicate progressive accumulation of sediments that now make up the lower part of Mount Sharp, although from this distance it is not possible to know if they were formed by aqueous or wind-blown processes. Close-up images collected as the rover climbs the ridge will help answer this question. The stratified rocks are cross cut by veins filled with a white mineral, likely calcium sulfate, that provide evidence of later episodes of fluid flow through the rocks. The panorama has been white-balanced so that the colors of the rock materials resemble how they would appear under daytime lighting conditions on Earth. It spans from southeast on the left to west on the right. The Sol 1785 location just north of the ridge is shown in a Sol 1782 traverse map. The ridge was informally named in early 2017 in memory of Vera Cooper Rubin (1928-2016), whose astronomical observations provided evidence for the existence of the universe's dark matter. An annotated figure is shown at https://photojournal.jpl.nasa.gov/catalog/PIA21850

This look ahead from NASA's Curiosity Mars rover includes four geological layers to be examined by the mission, and higher reaches of Mount Sharp beyond the planned study area. The redder rocks of the foreground are part of the Murray formation. Pale gray rocks in the middle distance of the right half of the image are in the Clay Unit. A band between those terrains is "Vera Rubin Ridge." Rounded brown knobs beyond the Clay Unit are in the Sulfate Unit, beyond which lie higher portions of the mountain. The view combines six images taken with the rover's Mast Camera (Mastcam) on Jan. 24, 2017, during the 1,589th Martian day, or sol, of Curiosity's work on Mars, when the rover was still more than half a mile (about a kilometer) north of Vera Rubin Ridge. The panorama has been white-balanced so that the colors of the rock and sand materials resemble how they would appear under daytime lighting conditions on Earth. It spans from east-southeast on the left to south on the right. The Sol 1589 location was just north of the waypoint labeled "Ogunquit Beach" on a map of the area that also shows locations of the Murray formation, Vera Rubin Ridge, Clay Unit and Sulfate Unit. The ridge was informally named in early 2017 in memory of Vera Cooper Rubin (1928-2016), whose astronomical observations provided evidence for the existence of the universe's dark matter. Annotated and full resolution TIFF files are available at https://photojournal.jpl.nasa.gov/catalog/PIA21716

The Mast Camera (Mastcam) on NASA's Curiosity Mars rover captured this view of "Vera Rubin Ridge" about two weeks before the rover started ascending this steep ridge on lower Mount Sharp. The view combines 13 images taken with the Mastcam's right-eye, telephoto-lens camera, on Aug. 19, 2017, during the 1,790th Martian day, or sol, of Curiosity's work on Mars. This and other Mastcam panoramas show details of the sedimentary rocks that make up the "Vera Rubin Ridge." This distinct topographic feature located on the lower slopes of Mount Sharp (Aeolis Mons) is characterized by the presence of hematite, an iron-oxide mineral, which has been detected from orbit. The Mastcam images show that the rocks making up the lower part of the ridge are characterized by distinct horizontal stratification with individual rock layers of the order of several inches (tens of centimeters) thick. Scientists on the mission are using such images to determine the ancient environment these rocks were deposited in. The repeated beds indicate progressive accumulation of sediments that now make up the lower part of Mount Sharp, although from this distance it is not possible to know if they were formed by aqueous or wind-blown processes. Close-up images collected as the rover climbs the ridge will help answer this question. The stratified rocks are cross cut by veins filled with a white mineral, likely calcium sulfate, that provide evidence of later episodes of fluid flow through the rocks. The panorama has been white-balanced so that the colors of the rock materials resemble how they would appear under daytime lighting conditions on Earth. It spans about 55 compass degrees centered to the south-southeast. The Sol 1790 location just north of the ridge is shown in a Sol 1789 traverse map. The ridge was informally named in early 2017 in memory of Vera Cooper Rubin (1928-2016), whose astronomical observations provided evidence for the existence of the universe's dark matter. An annotated figure is shown at https://photojournal.jpl.nasa.gov/catalog/PIA21851

As landing technology improves and these landing ellipses shrink, missions can aim for more precise landings, opening up new areas of Mars to explore. Perseverance takes it two steps further than previous missions. First, it uses a new algorithm to time its parachute deployment based on distance to its target rather than vehicle velocity. This shrinks the landing ellipse to 4.8 miles by 4.1 miles (7.7 kilometers by 6.6 kilometers). Second, the rover uses maps stored in its memory to avoid landing hazards within that smaller ellipse during its propulsive descent phase. This allows Perseverance to target safe landing locations within Jezero Crater. The rover is set to land on Feb. 18, 2021. Improvements in interplanetary navigation tightened the landing ellipse of Mars Pathfinder in comparison with missions before it. It landed by bouncing on the surface with airbags, and has the largest ellipse in this image, measuring 124.3 miles by 43.5 miles (200 by 70 kilometers). The Phoenix and InSight landers used retrorockets to land on three legs, but still had large possible landing areas about 80.8 miles (130 kilometers) long. In 2012, the Curiosity team developed guided entry technology, shrinking its landing ellipse further. The spacecraft used small rockets to steer itself through the atmosphere as it headed toward Gale Crater. https://photojournal.jpl.nasa.gov/catalog/PIA24349

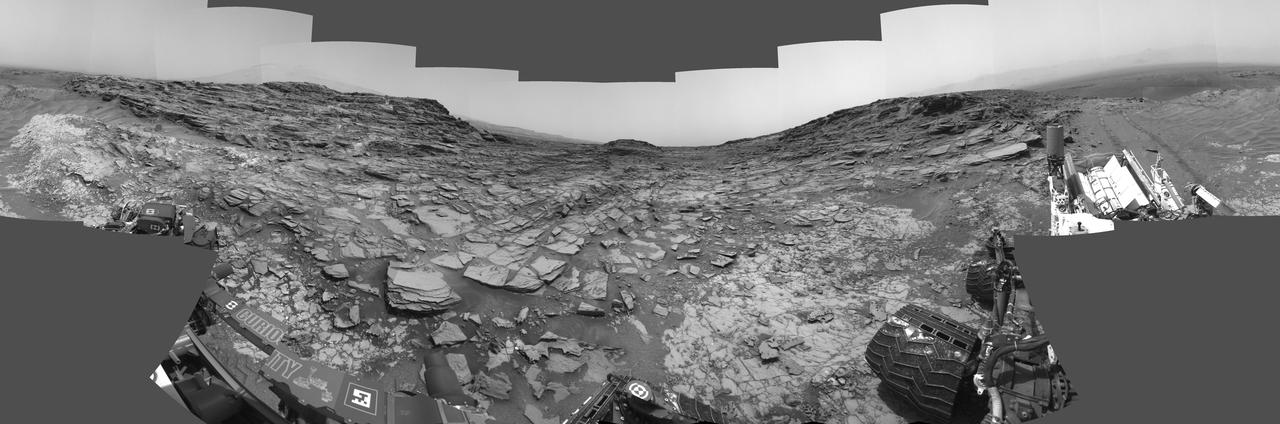
Climbing "Vera Rubin Ridge" provided NASA's Curiosity Mars rover this sweeping vista of the interior and rim of Gale Crater, including much of the rover's route during its first five-and-a-half years on Mars and features up to about 50 miles (85 kilometers) away. The scene spans from southwest on the left to northeast on the right, combining 16 side-by-side images taken by the left-eye, wider-angle-lens camera of Curiosity's Mast Camera (Mastcam). It has been white-balanced so the colors of the rock materials resemble how they would appear under daytime lighting conditions on Earth. The component images were taken on Oct. 25, 2017, during the 1,856th Martian day, or sol, of the rover's work on Mars. At that point, Curiosity had gained 1,073 feet (327 meters) in elevation and driven 10.95 miles (17.63 kilometers) from its landing site. Mount Sharp stands about 3 miles (5 kilometers) high in the middle of Gale Crater, which spans 96 miles (154 kilometers) in diameter. Vera Rubin Ridge is on the northwestern flank of lower Mount Sharp. The foreground of this panorama shows portions of lower Mount Sharp. The middle distance shows the floor of Gale Crater. Most of the horizon is formed by the crater's rim. The top of the rim is about 1.2 miles (2 kilometers) higher than the rover's position. On the horizon near the center of the image is a glimpse outside of Gale Crater, to a peak about 50 miles (85 kilometers) from the rover. An annotated version, Figure 1, indicates the rover's approximate path since its 2012 landing, identifies some of the sites it has investigated along the way, such as "Yellowknife Bay," "The Kimberley," "Namib Dune" and "Murray Buttes"; and points out other geological features visible in the scene, such as the channel of Peace Vallis, an ancient streambed descending from the crater rim. The relative positions of the labeled features are also mapped on an accompanying orbital view in PIA22208, with two areas color-coded for ease of matching them in the annotated panorama and the orbital view. Figure 2 is a version with a white-line box indicating the smaller area covered in a more-detailed vista (see PIA22209) taken from this same rover location by Mastcam's right-eye, telephoto-lens camera. It also includes three scale bars: of 50 meters (164 feet) at a distance of 1,170 meters (1,280 yards) near the base of Mount Sharp; of 1,000 meters (1,094 yards) at a distance of about 23.4 kilometers (14.5 miles) near the base of the crater wall; and of 2 kilometers (1.2 miles) at a distance of about 31.5 kilometers (19.6 miles) at the crest of the rim. Annotated images are available at https://photojournal.jpl.nasa.gov/catalog/PIA22210
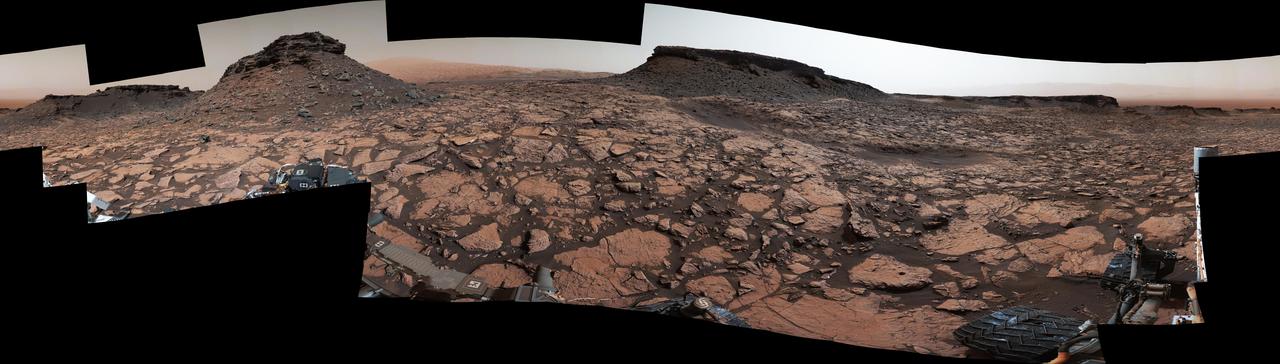
Original Caption Released with Image: This 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA's Curiosity Mars rover while the rover was in an area called "Murray Buttes" on lower Mount Sharp, one of the most scenic landscapes yet visited by any Mars rover. The view stitches together many individual images taken by Mastcam's left-eye camera on Sept. 4, 2016, during the 1,451st Martian day, or sol, of the mission. North is at both ends and south is in the center. The rover's location when it recorded this scene was the site it reached in its Sol 1448 drive. (See map at http://mars.nasa.gov/msl/multimedia/images/?ImageID=8015.) The dark, flat-topped mesa near the center of the scene rises to about 39 feet (about 12 meters) above the surrounding plain. From the rover's position, the top of this mesa is about 131 feet (about 40 meters) away, and the beginning of the debris apron at the base of the mesa is about 98 feet (about 30 meters) away. In the left half of the image, the dark butte that appears largest sits eastward from the rover and about 33 feet (about 10 meters) high. From the rover's position, the top of this butte is about 85 feet (about 26 meters) away, and the beginning of the debris apron at its base is about 33 feet (about 10 meters) away. An upper portion of Mount Sharp appears on the horizon to the right of it. The relatively flat foreground is part of a geological layer called the Murray formation, which includes lakebed mud deposits. The buttes and mesas rising above this surface are eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed. They are capped by material that is relatively resistant to erosion, just as is the case with many similarly shaped buttes and mesas on Earth. The area's informal naming honors Bruce Murray (1931-2013), a Caltech planetary scientist and director of NASA's Jet Propulsion Laboratory, Pasadena, California. The scene is presented with a color adjustment that approximates white balancing, to resemble how the rocks and sand would appear under daytime lighting conditions on Earth. http://photojournal.jpl.nasa.gov/catalog/PIA20840