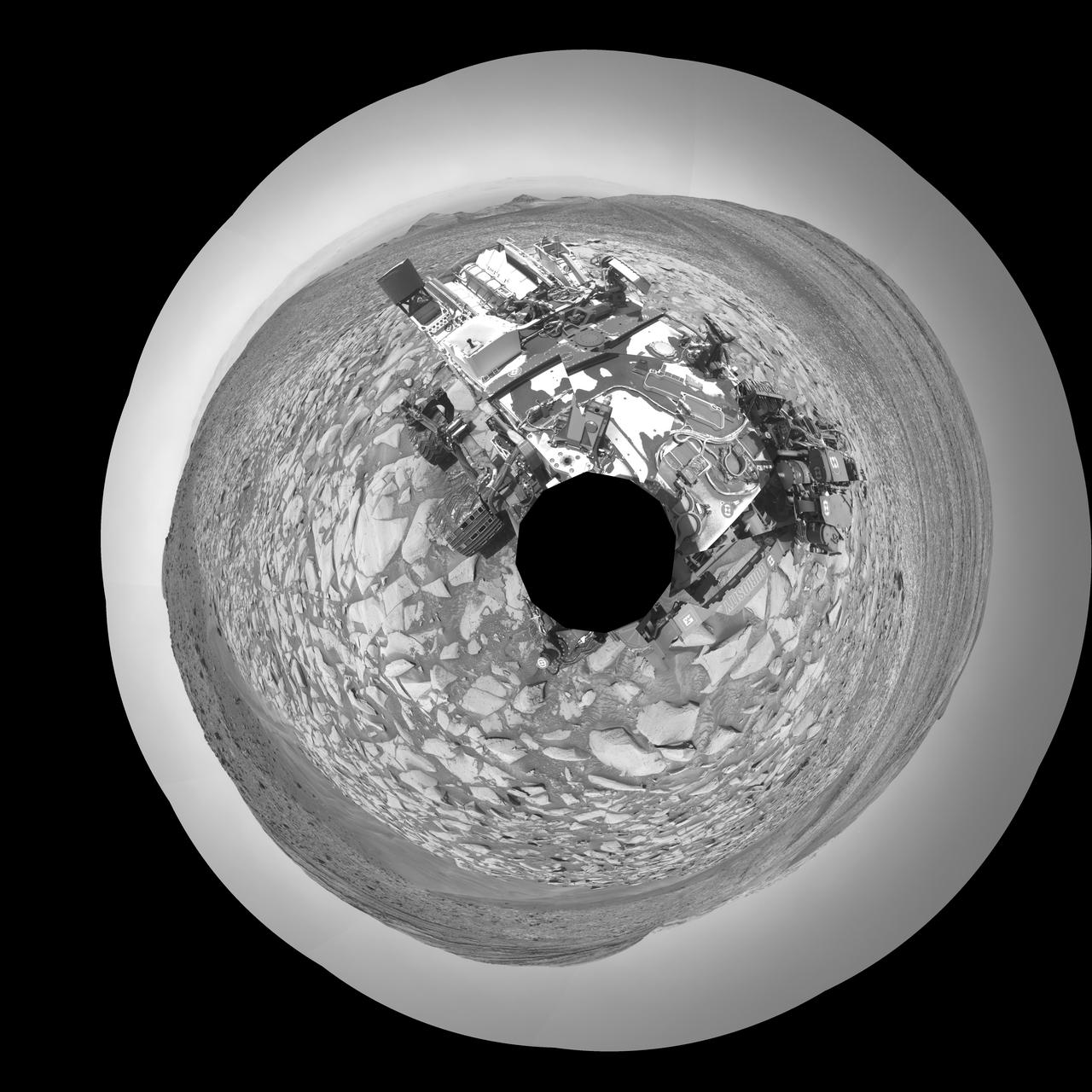
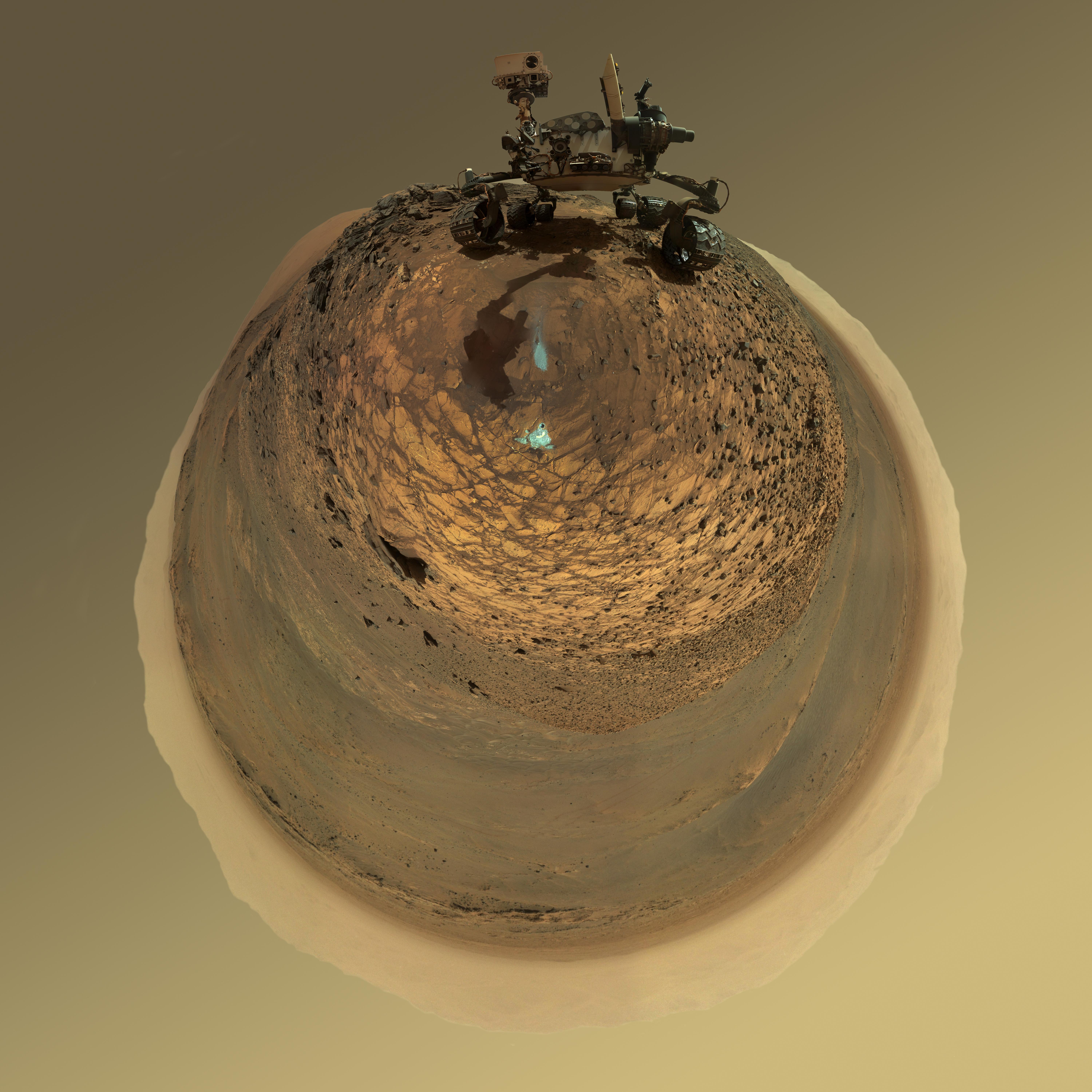
NASA's Curiosity Mars rover captured this selfie using its left black-and-white navigation camera, which is mounted on its mast, or "head," on Feb. 3, 2024, the 4,086th Martian day, or sol, of the mission. The selfie is made up of 36 individual images that were stitched together after being sent back to Earth. This warped view is different than the color selfies Curiosity has taken in the past using the camera on the end of its robotic arm, called the Mars Hand Lens Imager, or MAHLI. With its arm acting as a kind of selfie stick, Curiosity can show more of its body and surroundings. Instead, the images from the navigation camera on the mast are displayed as a polar projection; the black hole in the center is where the mast is located on the rover, an area which it can't image. https://photojournal.jpl.nasa.gov/catalog/PIA26310
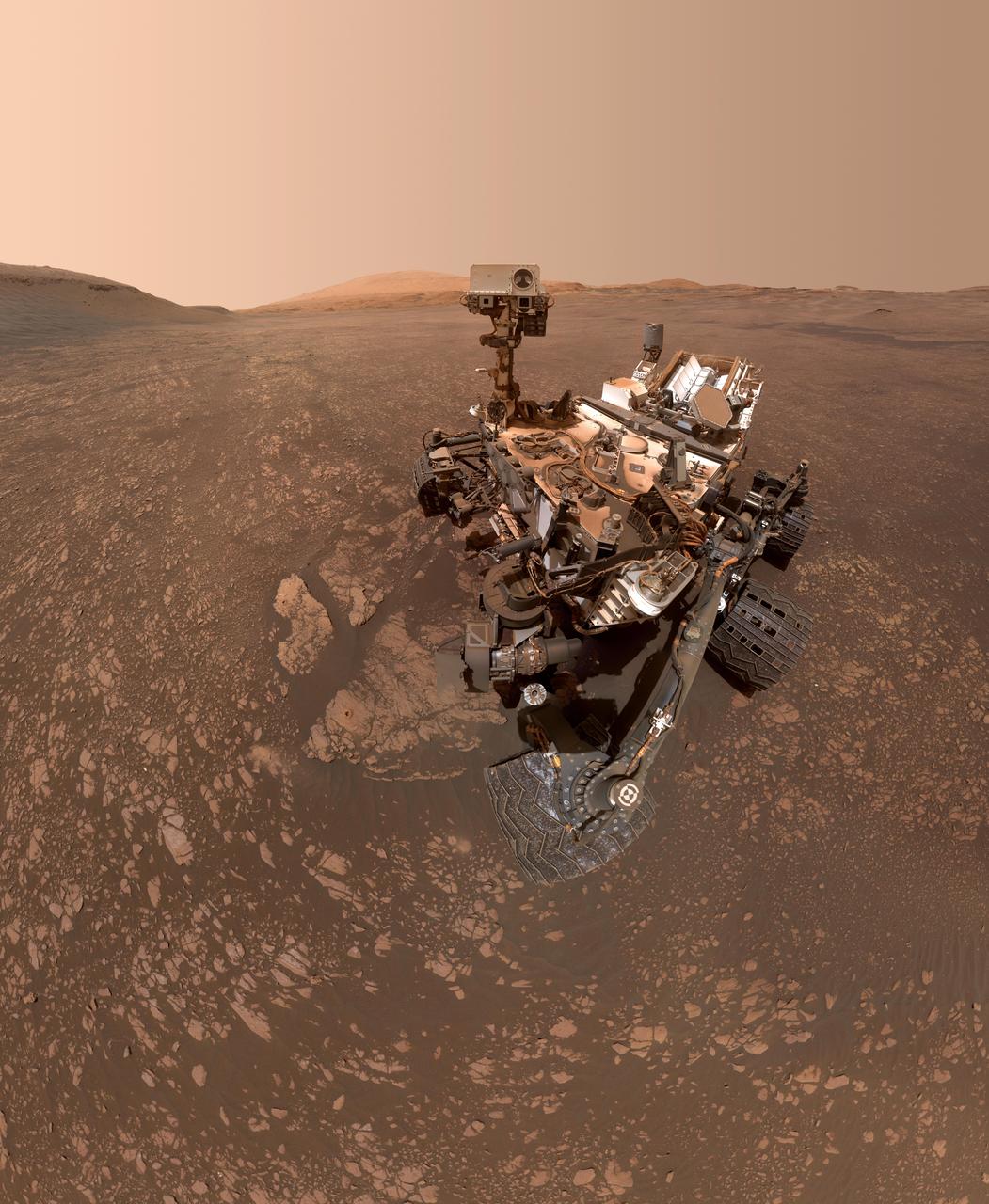
NASA's Curiosity Mars rover took this selfie on May 12, 2019 (the 2,405th Martian day, or sol, of the mission). To the lower-left of the rover are its two recent drill holes, at targets called "Aberlady" and "Kilmarie." These are Curiosity's 20th and 21st drill sites. The selfie is composed of 57 individual images taken by the rover's Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are stitched together into a panorama, and the robotic arm is digitally removed. https://photojournal.jpl.nasa.gov/catalog/PIA23240
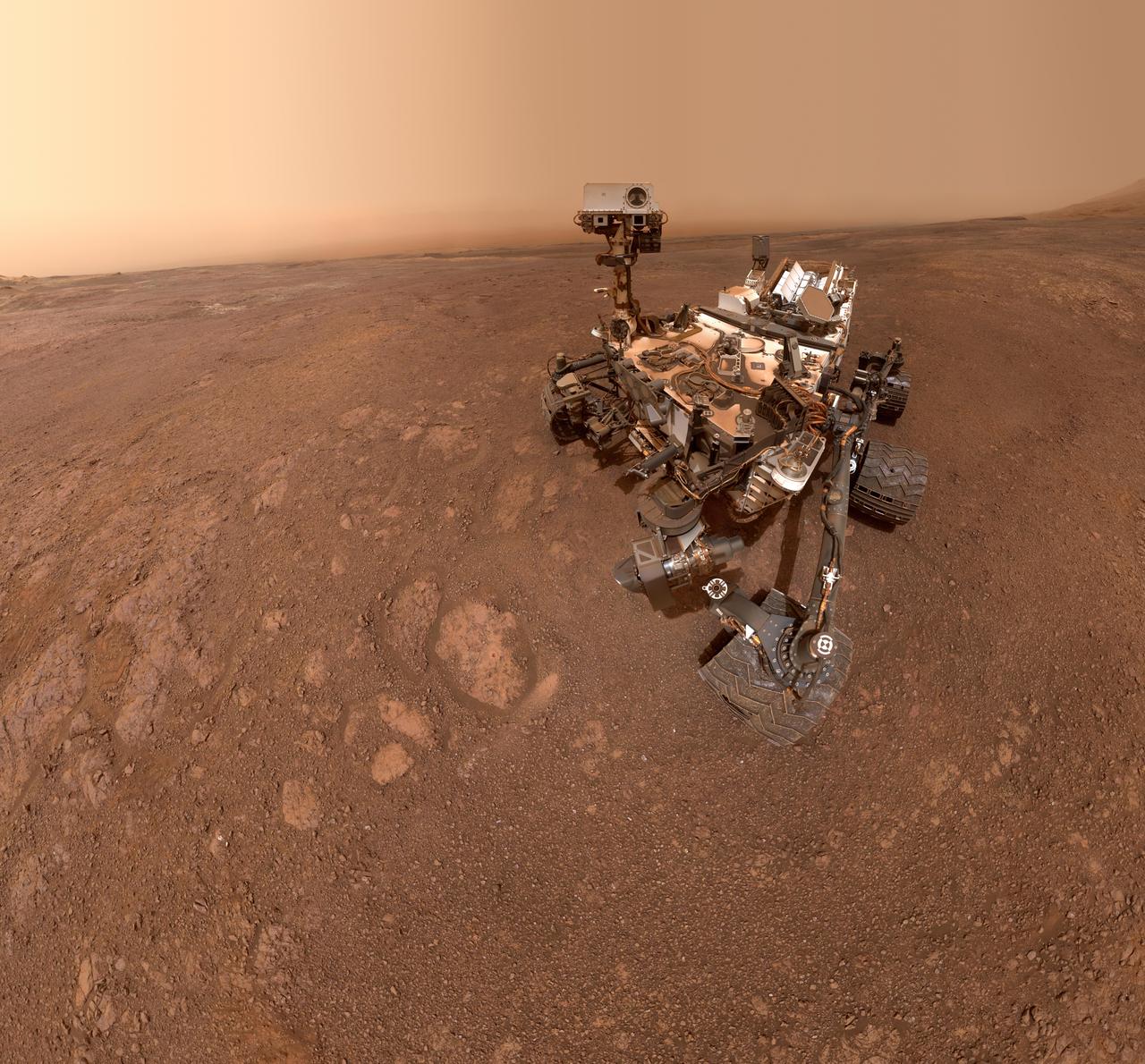
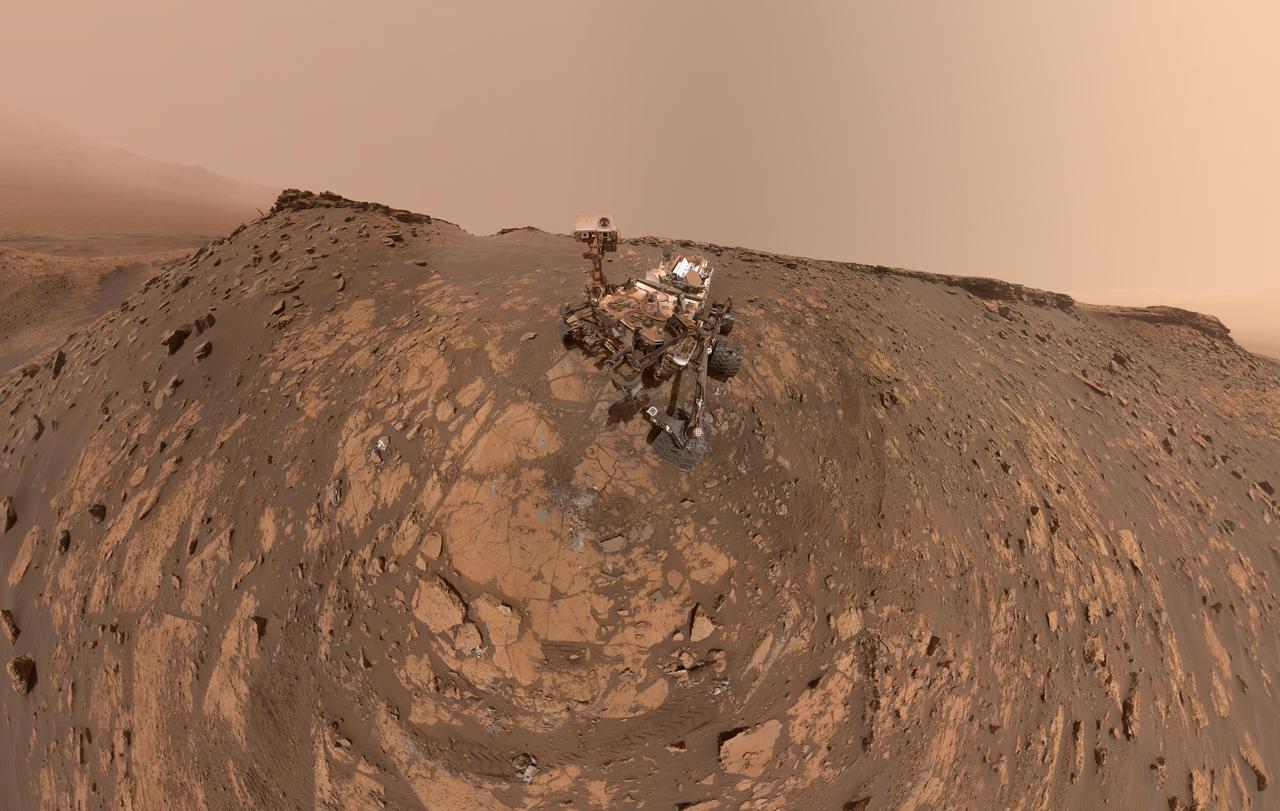
A selfie taken by NASA's Curiosity Mars rover on Sol 2291 (January 15) at the "Rock Hall" drill site, located on Vera Rubin Ridge. This was Curiosity's 19th drill site. The drill hole is visible to the rover's lower-left; the entire scene is slightly dustier than usual due to a regional dust storm affecting the area. The selfie is composed of 57 individual images taken by the rover's Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are then stitched together into a panorama. https://photojournal.jpl.nasa.gov/catalog/PIA22960
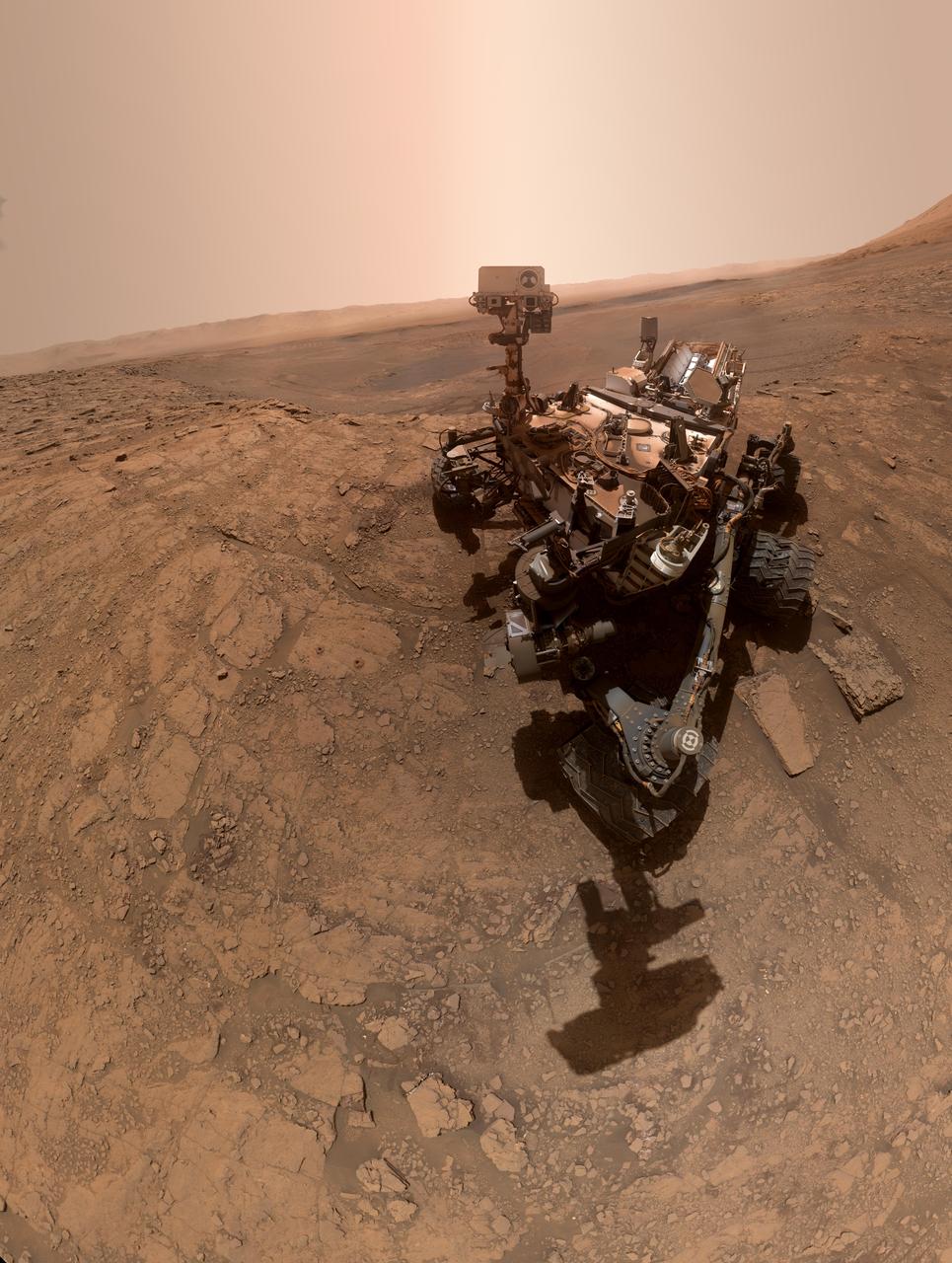
NASA's Curiosity Mars rover took this selfie at a location nicknamed "Mary Anning" after a 19th century English paleontologist. Curiosity snagged three samples of drilled rock at this site on its way out of the Glen Torridon region, which scientists believe was a site where ancient conditions would have been favorable to supporting life, if it ever was present. Curiosity took the selfie using a camera called the Mars Hand Lens Imager located on the end of its robotic arm (videos explaining how Curiosity's selfies are taken can be found here). A close-up detail from within the selfie shows the three holes that a rock drill, also found on the end of Curiosity's arm, added to the surface. The three drill holes are named "Mary Anning," "Mary Anning 3" and "Groken," the last name coming from a site of geological interest in the Scottish countryside. https://photojournal.jpl.nasa.gov/catalog/PIA24173

A self-portrait of NASA's Curiosity rover taken on Sol 2082 (June 15, 2018). A Martian dust storm has reduced sunlight and visibility at the rover's location in Gale Crater. Self-portraits are created using images taken by Curiosity's Mars Hands Lens Imager (MAHLI). https://photojournal.jpl.nasa.gov/catalog/PIA22486

This video, taken by the Navigation Cameras, or Navcams, on the Mast of NASA's Curiosity Mars rover, shows the rover's robotic arm as it rotates to take a selfie. A camera at the end of the arm captured 86 individual images that were later stitched into a panorama. The Navcams are black-and-white cameras generally used to help engineers plan Curiosity's movements. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA23625
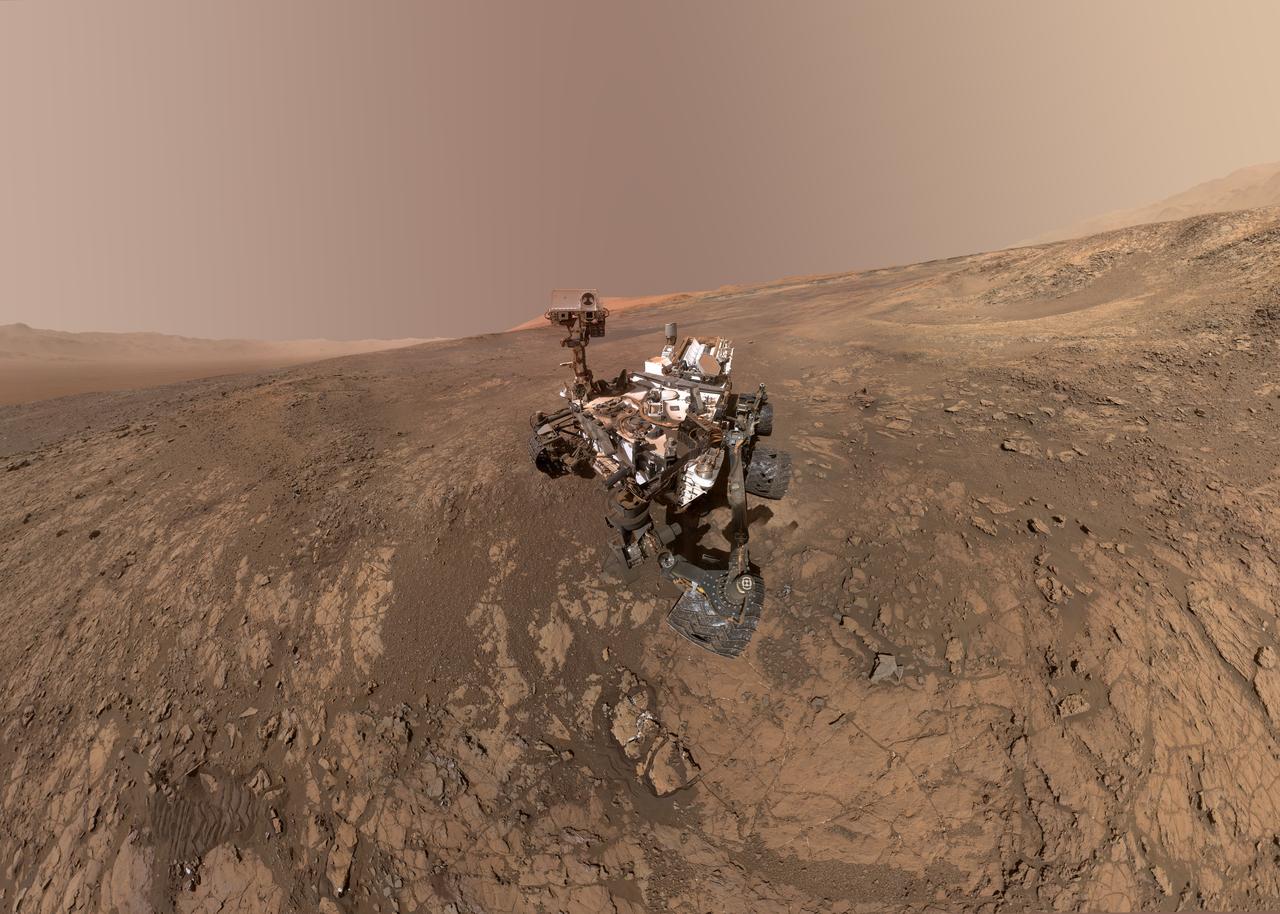
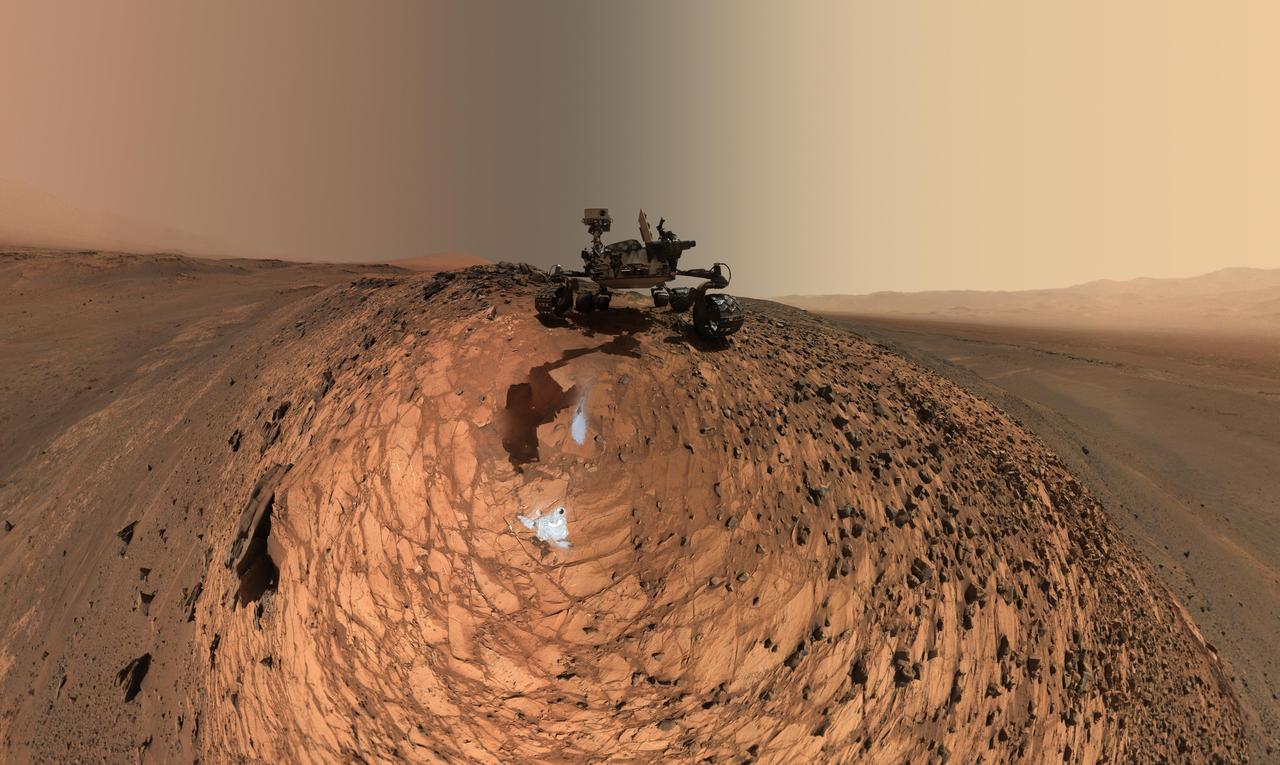
This self-portrait of NASA's Curiosity Mars rover shows the vehicle on Vera Rubin Ridge, which it's been investigating for the past several months. Directly behind the rover is the start of a clay-rich slope scientists are eager to begin exploring. In the coming week, Curiosity will begin to climb this slope. North is on the left and west is on the right, with Gale Crater's rim on the horizon of both edges. Poking up just behind Curiosity's mast is Mount Sharp, photobombing the robot's selfie. Curiosity landed on Mars five years ago with the intention of studying lower Mount Sharp, where it will remain for all of its time on Mars. The mountain's base provides access to layers formed over millions of years. These layers formed in the presence of water -- likely due to a lake or lakes that sat at the bottom of the mountain, which sits inside of Gale Crater. This mosaic was assembled from dozens of images taken by Curiosity's Mars Hands Lens Imager (MAHLI). They were all taken on Jan. 23, 2018, during Sol 1943. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. A full-resolution image is available at https://photojournal.jpl.nasa.gov/catalog/PIA22207
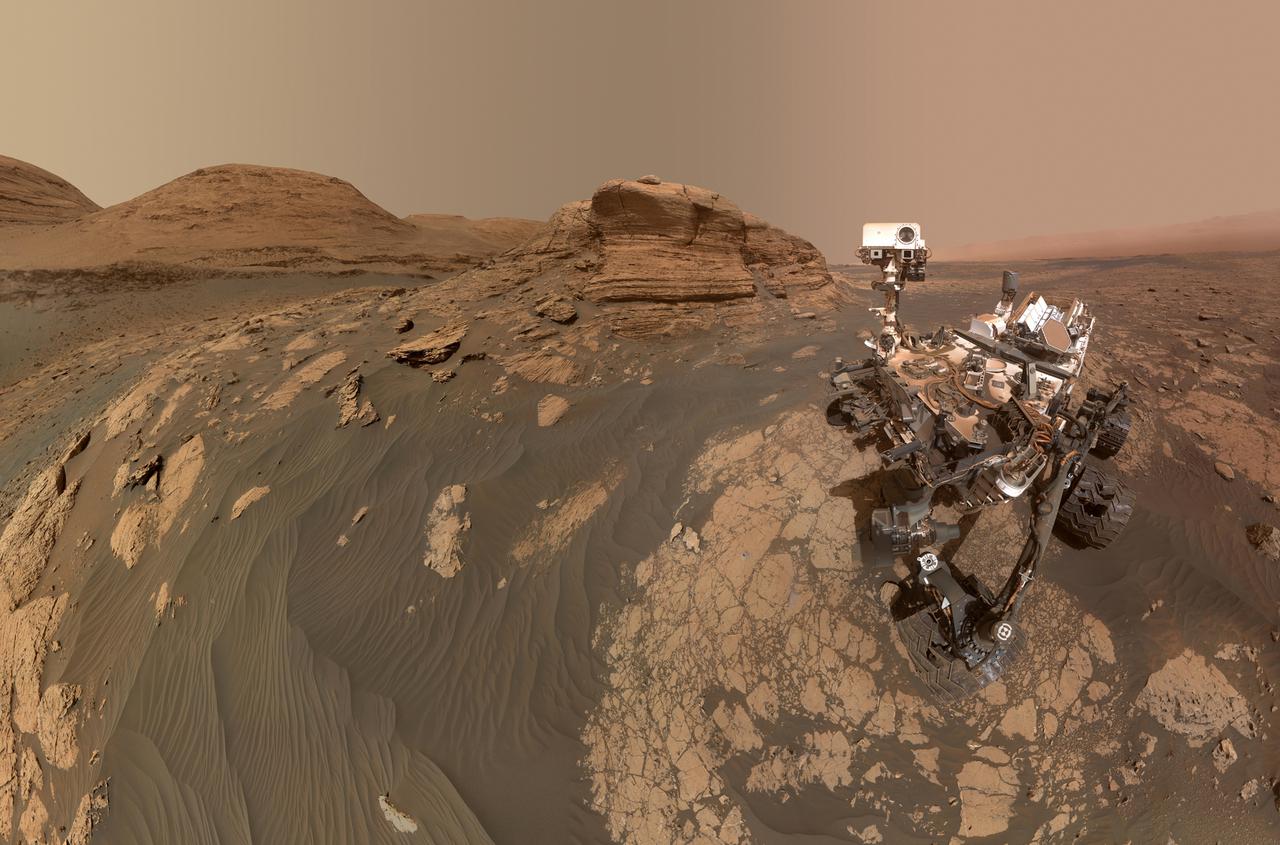
NASA's Curiosity Mars rover used two different cameras to create this selfie in front of Mont Mercou, a rock outcrop that stands 20 feet (6 meters) tall. The panorama is made up of 60 images taken by the Mars Hand Lens Imager (MAHLI) on the rover's robotic arm on March 26, 2021, the 3070th Martian day, or sol, of the mission. These were combined with 11 images taken by the Mastcam on the mast, or "head," of the rover on March 16, 2021, the 3,060th Martian day of the mission. The hole visible to the left of the rover is where its robotic drill sampled a rock nicknamed "Nontron." The Curiosity team is nicknaming features in this part of Mars using names from the region around the village of Nontron in southwestern France. https://photojournal.jpl.nasa.gov/catalog/PIA24543

This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called "Buckskin" on lower Mount Sharp. The selfie combines several component images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. This view is a portion of a larger panorama available at PIA19807. A close look reveals a small rock stuck onto Curiosity's left middle wheel (on the right in this head-on view). The rock had been seen previously during periodic monitoring of wheel condition about three weeks earlier, in the MAHLI raw image at http://mars.nasa.gov/msl/multimedia/raw/?rawid=1046MH0002640000400290E01_DXXX&s=1046. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (/catalog/PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. The selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19808
This selfie was taken by NASA's Curiosity Mars rover on Feb. 26, 2020 (the 2,687th Martian day, or sol, of the mission). The crumbling rock layer at the top of the image is the Greenheugh Pediment, which Curiosity climbed soon after taking the image. Directly to the left of Curiosity's foremost wheel is a hole the rover drilled at a rock feature called "Hutton." The selfie includes 86 individual images taken by the Mars Hand Lens Imager (MAHLI) camera on the end of Curiosity's robotic arm. The images were then stitched into a panorama. https://photojournal.jpl.nasa.gov/catalog/PIA23624
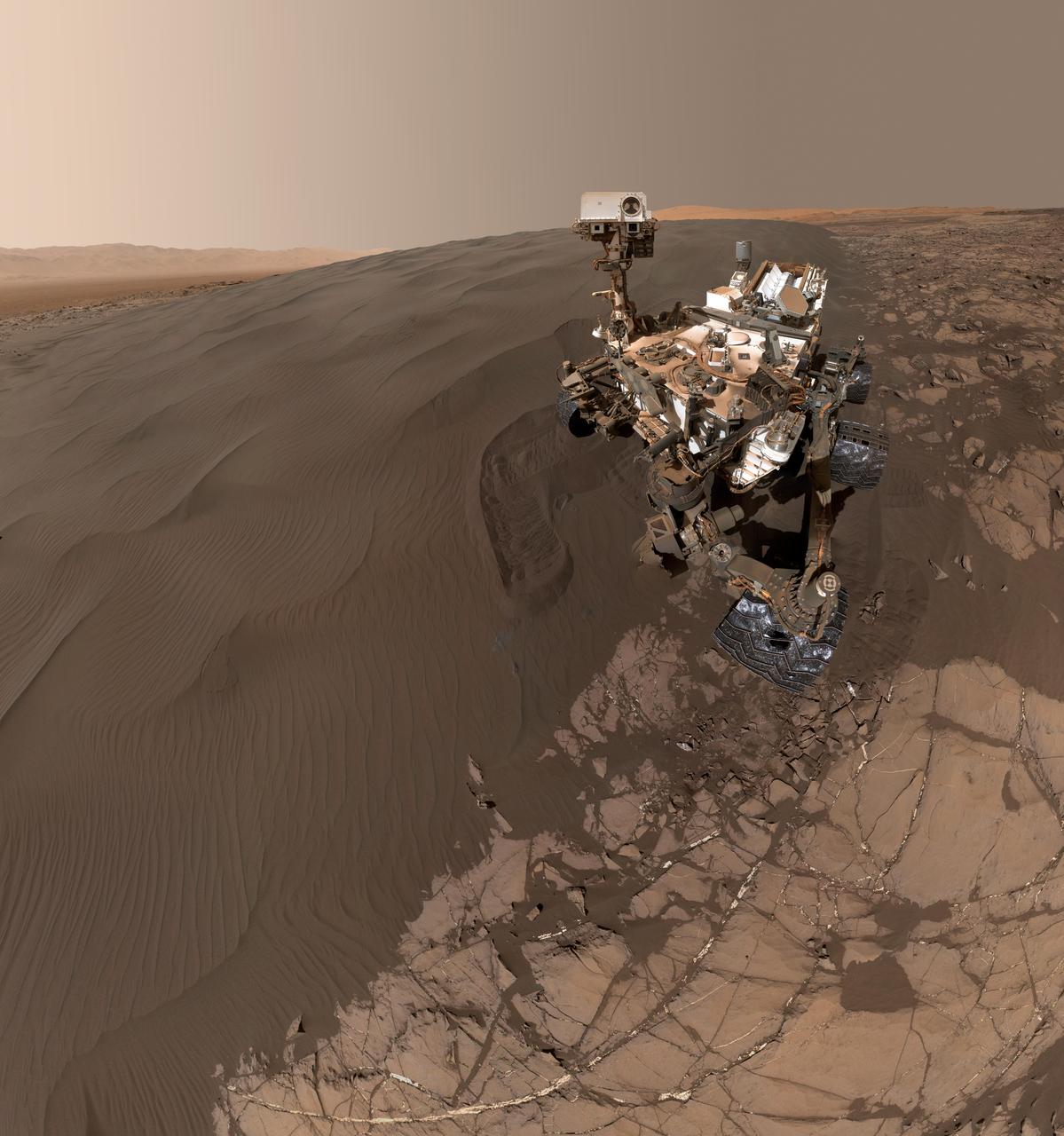
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at "Namib Dune," where the rover's activities included scuffing into the dune with a wheel and scooping samples of sand for laboratory analysis. The scene combines 57 images taken on Jan. 19, 2016, during the 1,228th Martian day, or sol, of Curiosity's work on Mars. The camera used for this is the Mars Hand Lens Imager (MAHLI) at the end of the rover's robotic arm. Namib Dune is part of the dark-sand "Bagnold Dune Field" along the northwestern flank of Mount Sharp. Images taken from orbit have shown that dunes in the Bagnold field move as much as about 3 feet (1 meter) per Earth year. The location of Namib Dune is show on a map of Curiosity's route at http://mars.nasa.gov/msl/multimedia/images/?ImageID=7640. The relationship of Bagnold Dune Field to the lower portion of Mount Sharp is shown in a map at PIA16064. The view does not include the rover's arm. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390) and "Buckskin" (PIA19807). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Other Curiosity self-portraits are available at http://photojournal.jpl.nasa.gov/catalog/PIA20316
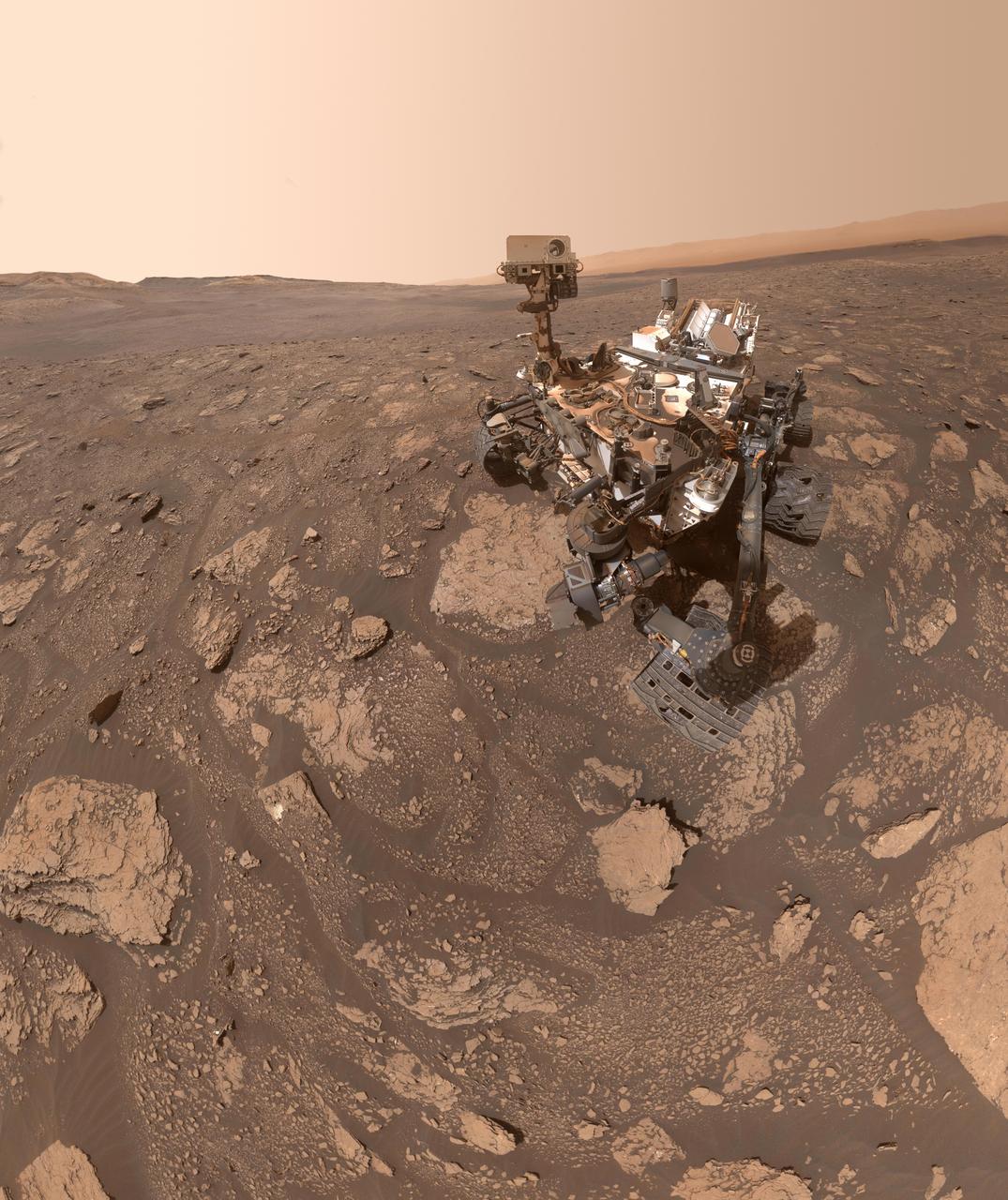
NASA's Curiosity rover took this selfie on Oct. 11, 2019, the 2,553rd Martian day, or sol, of its mission. The rover drilled twice in this location, nicknamed "Glen Etive" (pronounced "glen EH-tiv"). About 984 feet (300 meters) behind the rover, Vera Rubin Ridge rises up. Behind it lies the floor of Gale Crater, which Curiosity is exploring, and the northern rim of the crater. Just left of the rover are the two drill holes, called "Glen Etive 1" (right) and "Glen Etive 2" (left). Curiosity performed its first wet-chemistry experiment on a drilled sample at this location. The rover can analyze the chemical composition of rock samples by powderizing them with the drill, then dropping the samples into a portable lab in its belly called Sample Analysis at Mars (SAM). This panorama is made up of 57 individual images taken by the Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are stitched together into a panorama; the robotic arm isn't visible in the parts of the images used in the composite. https://photojournal.jpl.nasa.gov/catalog/PIA23378
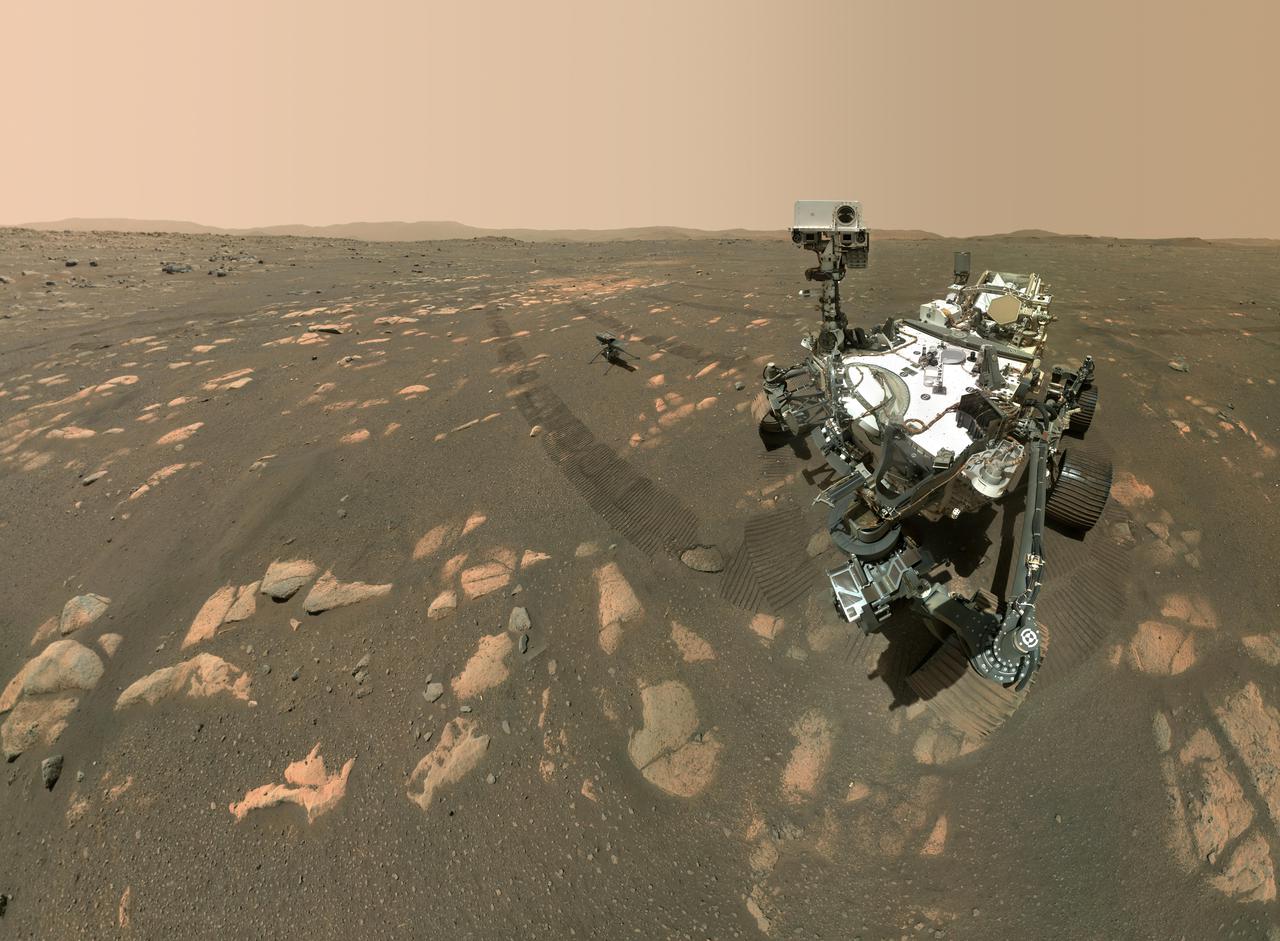
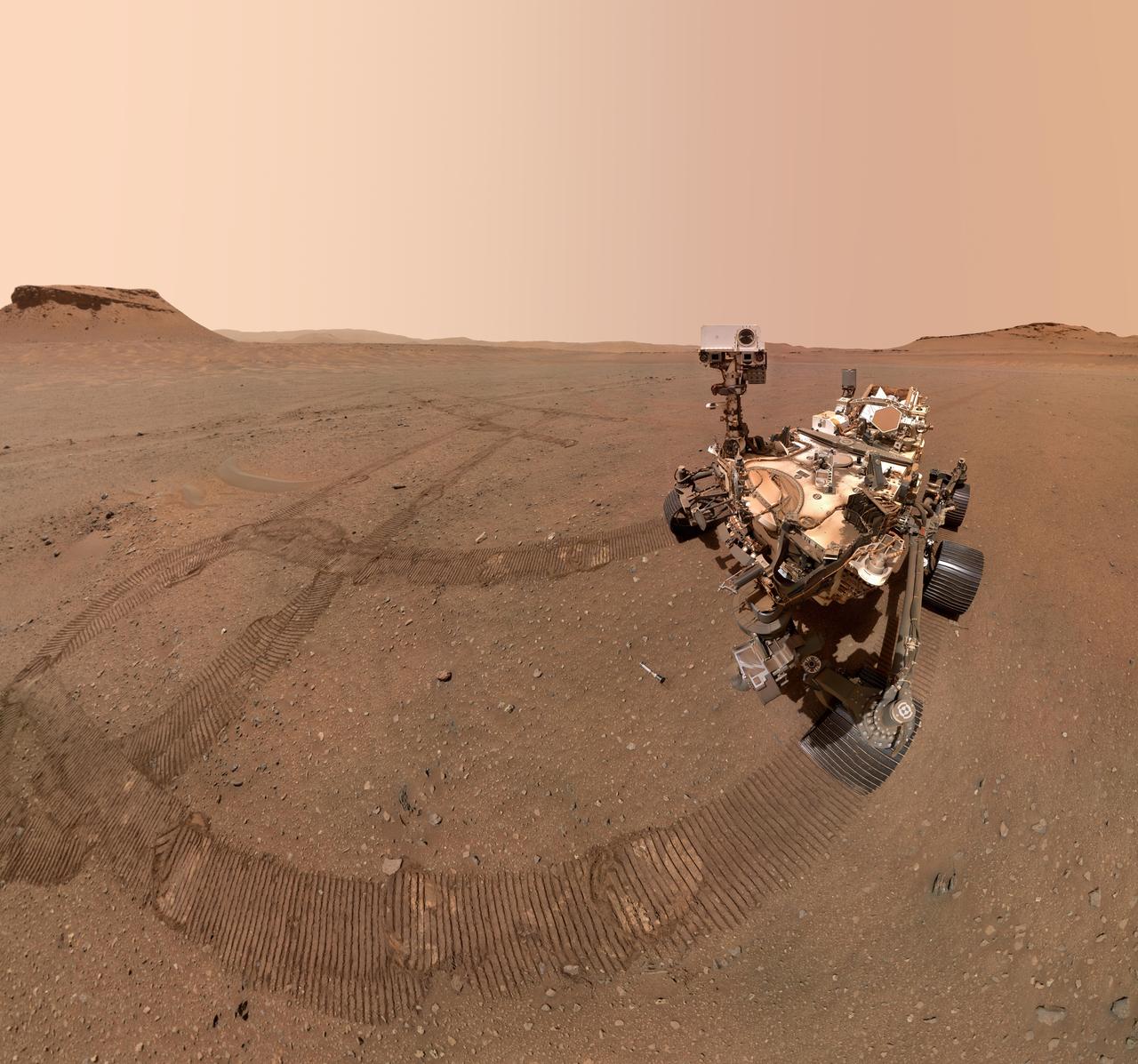
NASA's Perseverance Mars rover took a selfie with the Ingenuity helicopter, seen here about 13 feet (3.9 meters) from the rover in this image taken April 6, 2021, the 46th Martian day, or sol, of the mission by the WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) camera on the SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) instrument, located at the end of the rover's long robotic arm. Perseverance's selfie with Ingenuity is made up of 62 individual images stitched together once they are sent back to Earth; they were taken in sequence while the rover was looking at the helicopter, then again while it was looking at the WATSON camera. The Curiosity rover takes similar selfies using a camera on its robotic arm. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA24542
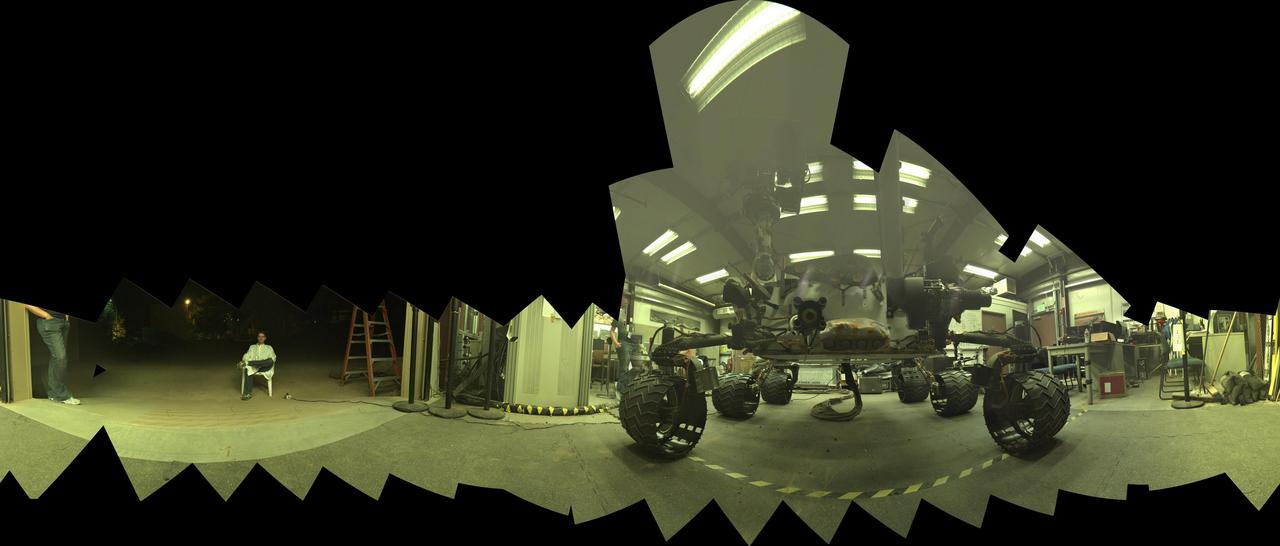
This view of a test rover at NASA's Jet Propulsion Laboratory, Pasadena, California, results from advance testing of arm positions and camera pointings for taking a low-angle self-portrait of NASA's Curiosity Mars rover. This rehearsal in California led to a dramatic Aug. 5, 2015, selfie of Curiosity, online at PIA19807. Curiosity's arm-mounted Mars Hand Lens Imager (MAHLI) camera took 92 of component images that were assembled into that mosaic. The rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This practice version was taken at JPL's Mars Yard in July 2013, using the Vehicle System Test Bed (VSTB) rover, which has a test copy of MAHLI on its robotic arm. MAHLI was built by Malin Space Science Systems, San Diego. JPL, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19810
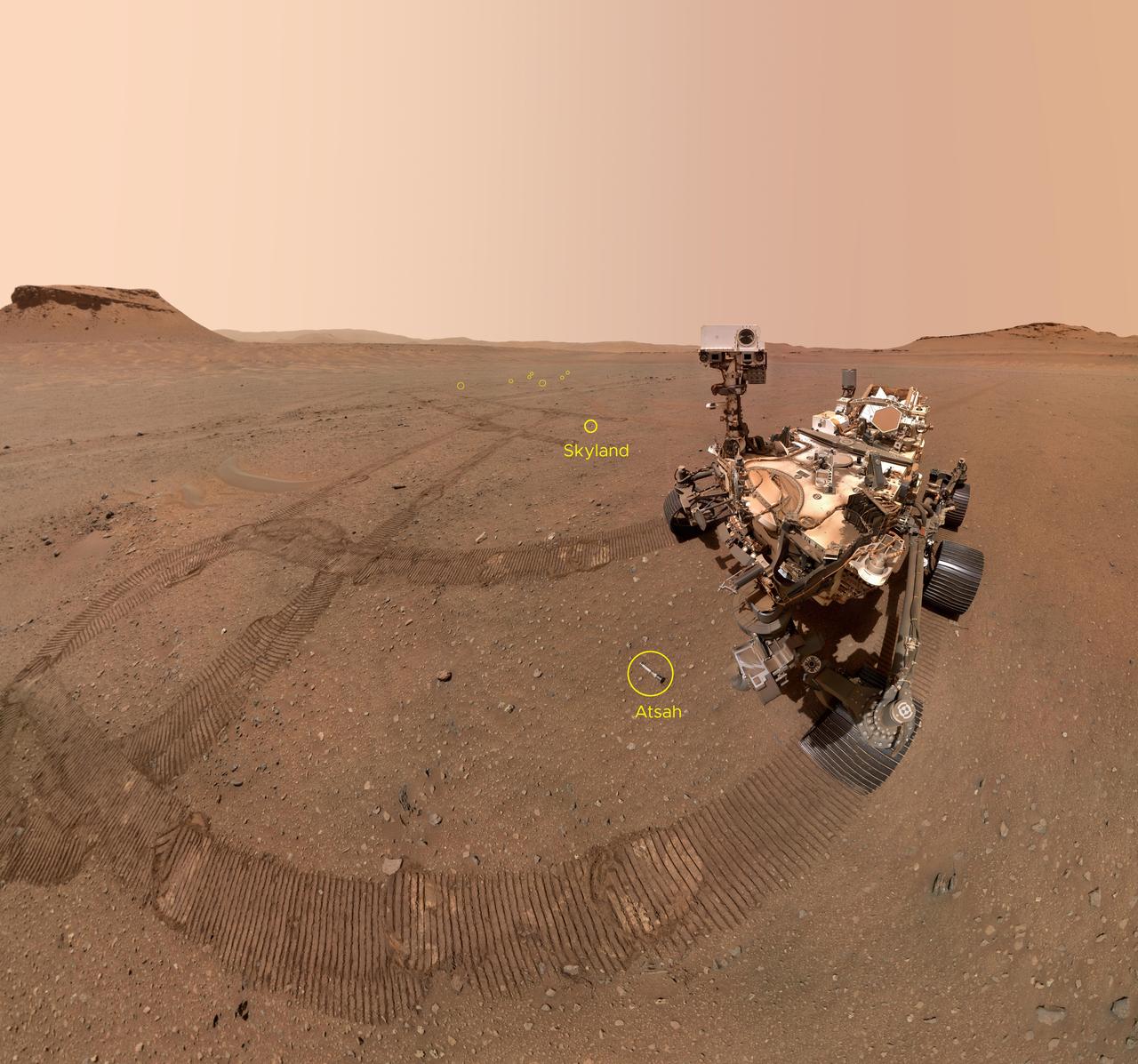
NASA's Perseverance Mars rover took a selfie with nine of the 10 sample tubes it deposited at a sample depot created within an area of Jezero Crater nicknamed "Three Forks." This annotated version of the selfie points out the estimated locations of those nine tubes. The ninth tube dropped during the construction of the depot, containing the sample the science team refers to as "Atsah," can be seen in front of the rover. Other sample tubes are visible in the background, including "Skyland," which is labeled. The image was taken by the WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) camera on the end of the rover's robotic arm on Jan. 22, 2023, the 684th Martian day, or sol, of the mission. The selfie is composed of 59 individual WATSON images that were stitched together once they were sent back to Earth. The Curiosity rover takes similar selfies using a camera on its robotic arm; videos explaining how the rovers take their selfies can be found here. The depot marks a crucial milestone in the NASA-ESA (European Space Agency) Mars Sample Return campaign that aims to bring Mars samples to Earth for closer study. The depot – completed when the 10th tube was dropped on Jan. 29, 2023 – will serve as a backup if Perseverance can't deliver its samples to a future robotic lander. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA25735
NASA's Perseverance Mars rover took a selfie with several of the 10 sample tubes it deposited at a sample depot it is creating within an area of Jezero Crater nicknamed "Three Forks." The image was taken by the WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) camera on the end of the rover's robotic arm on Jan. 22, 2023, the 684th Martian day, or sol, of the mission. The ninth tube dropped during the construction of the depot, containing the sample the science team refers to as "Atsah," can be seen in front of the rover. Other sample tubes are visible in the background. In an animated GIF, the rover looks down at the "Atsah" sample then back at the camera. The selfie is composed of 59 individual WATSON images that were stitched together once they were sent back to Earth. The Curiosity rover takes similar selfies using a camera on its robotic arm; videos explaining how the rovers take their selfies can be found here. The depot marks a crucial milestone in the NASA-ESA (European Space Agency) Mars Sample Return campaign that aims to bring Mars samples to Earth for closer study. The depot will serve as a backup if Perseverance can't deliver its samples to a future robotic lander. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA25681
This version of a self-portrait of NASA's Curiosity Mars rover at a drilling site called "Buckskin" on lower Mount Sharp is presented as a stereographic projection, which shows the horizon as a circle. It is a mosaic assembled from the same set of 92 component raw images used for the flatter-horizon version at PIA19807. The component images were taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from inside Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the "Marias Pass" area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates most of the rest of the horizon.the horizon on the left and right of the mosaic. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. The assembled mosaic does not include the rover's arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19806
This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle above the "Buckskin" rock target, where the mission collected its seventh drilled sample. The site is in the "Marias Pass" area of lower Mount Sharp. The scene combines dozens of images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. The 92 component images are among MAHLI Sol 1065 raw images at http://mars.nasa.gov/msl/multimedia/raw/?s=1065&camera=MAHLI. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the Marias Pass area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates the horizon on the left and right of the mosaic. A portion of this selfie cropped tighter around the rover is at PIA19808. Another version of the wide view, presented in a projection that shows the horizon as a circle, is at PIA19806. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. Before sending Curiosity the arm-positioning commands for this Buckskin belly panorama, the team previewed the low-angle sequence of camera pointings on a test rover in California. A mosaic from that test is at PIA19810. This selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19807