
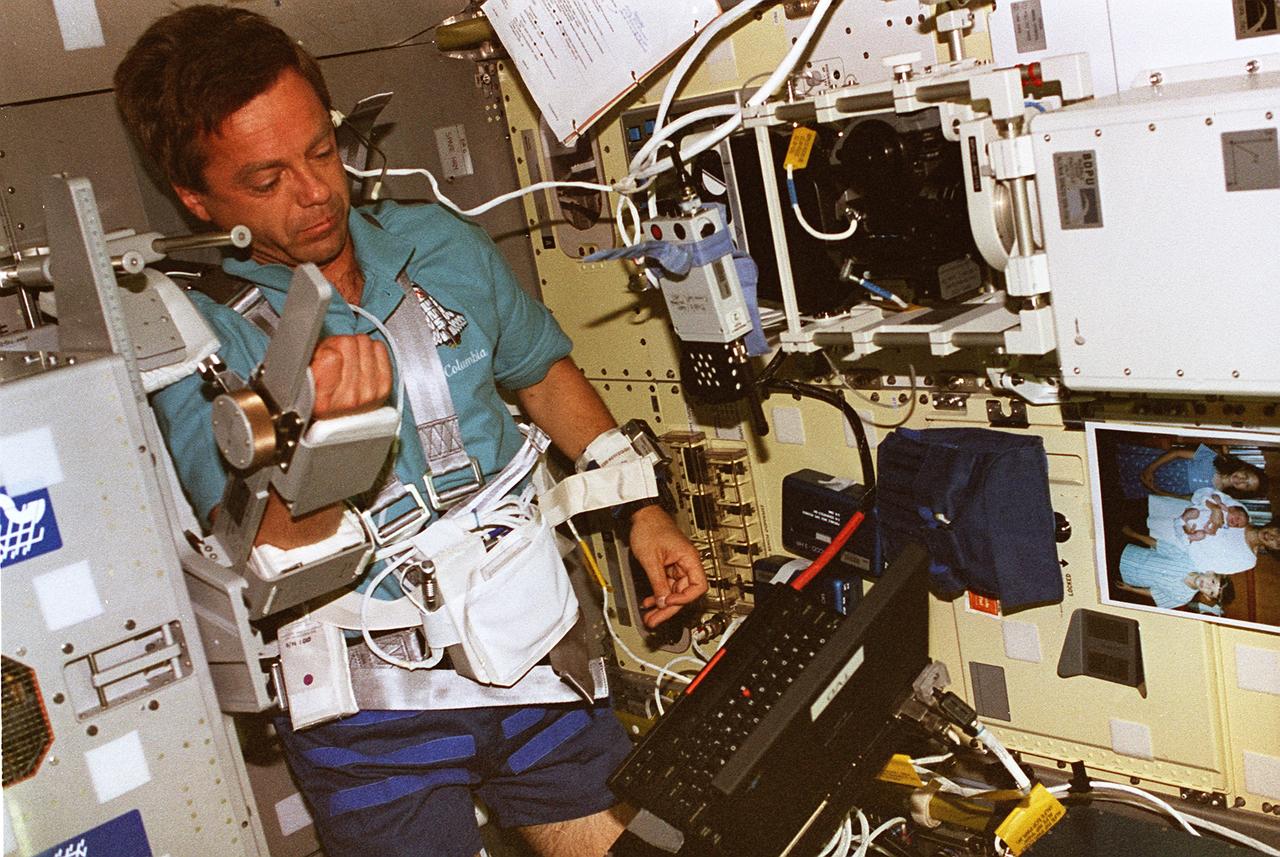
STS078-430-009 (20 June-7 July 1996) --- Astronaut Richard M. Linnehan, mission specialist, performs a test on his leg using the Torque Velocity Dynamometer (TVD). Dr. Thirsk was measuring changes in muscle forces of the leg in this particular view. The TVD hardware is also used to measure arm muscle forces and velocity at the bicep and tricep areas. Crewmembers for the mission performed all experiment protocols prior to flight to develop a baseline and will also perform post-flight tests to complete the analysis. Additionally, muscle biopsies were taken before the flight and will be conducted after the flight.
STS078-304-018 (20 June - 7 July 1996) --- Payload specialist Robert B. Thirsk, representing the Canadian Space Agency (CSA), performs a test on his arm using the Torque Velocity Dynamometer (TVD). Dr. Thirsk was measuring changes in muscle forces of the bicep and tricep in this particular view. The TVD hardware is also used to measure leg muscle forces and velocity at the ankle and elbow joints. Crew members for the mission performed all experiment protocols prior to flight to develop a baseline and will also perform post-flight tests to complete the analysis. Additionally, muscle biopsies were taken before the flight and will be conducted after the flight.
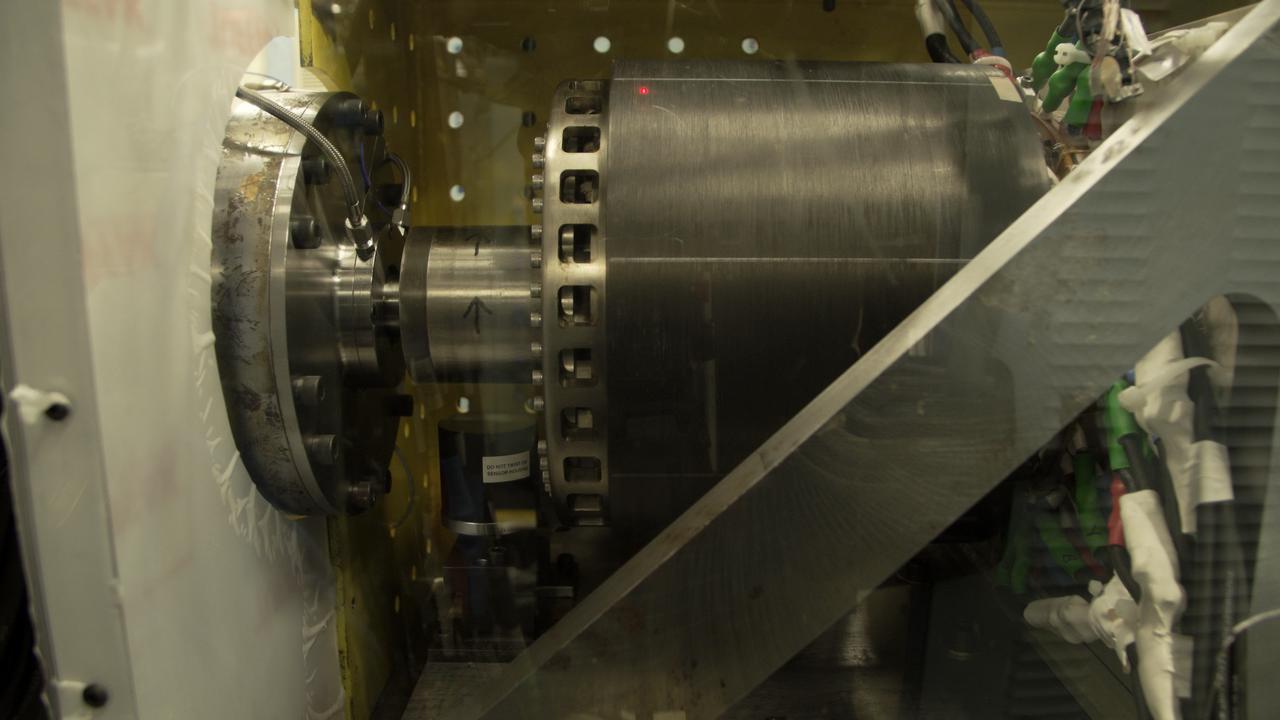
UIUC’s megawatt machine (right) was connected to a dynamometer (left) to test its effectiveness as an electric generator in a safety enclosure at a Collins Aerospace test facility in Rockford, Illinois. This unusual design has its rotating parts on the outside, so that both the cylinder on the right and the cylinder with arrows spin during operation.

STS078-396-015 (20 June - 7 July 1996) --- Payload specialist Jean-Jacques Favier, representing the French Space Agency (CNES), prepares a sample for the Advanced Gradient Heating Facility (AGHF) while wearing instruments that measure upper body movement. The Torso Rotation Experiment (TRE) complements other vestibular studies that measure differences in the way human beings react physically to their surroundings in microgravity. This is a typical Life and Microgravity Spacelab (LMS-1) mission scene, with several experiments being performed. Astronaut Susan J. Helms, payload commander, assists Favier in the AGHF preparations. Astronaut Richard M. Linnehan (bottom right), mission specialist, tests his muscle response with the Handgrip Dynamometer. Astronaut Thomas T. (Tom) Henricks (far background), mission commander, offers assistance.

jsc2021e009414 (8/12/20020 --- A preflight view of theHand Posture Analyzer (HPA) Hand Grip Dynamometer (HGD). The Hand Posture Analyzer (HPA) facility helps to examine the way hand and arm muscles are used differently aboard the International Space Station (ISS). Image courtesy of the Italian Space Agency (ASI).

jsc2021e009417 (8/12/2002) --- A preflight view of the Hand Posture Analyzer (HPA) Pinch Force Dynamometer (PFD). The Hand Posture Analyzer (HPA) facility helps to examine the way hand and arm muscles are used differently aboard the International Space Station (ISS). Image courtesy of the Italian Space Agency (ASI).

ISS008-E-21610 (15 April 2004) --- Astronaut C. Michael Foale, Expedition 8 commander and NASA ISS science officer, completes his third and final data collection with the Hand Posture Analysis (HPA) investigation in the Destiny laboratory on the International Space Station (ISS). After setting up the video tape recorder (VTR) for documenting the activities, Foale used the posture acquisition glove (PAG), which has delicate sensors attached to the tops of the fingers, to operate the handgrip dynamometer (HGD).

ISS008-E-21606 (15 April 2004) --- Astronaut C. Michael Foale, Expedition 8 commander and NASA ISS science officer, completes his third and final data collection with the Hand Posture Analysis (HPA) investigation in the Destiny laboratory on the International Space Station (ISS). After setting up the video tape recorder (VTR) for documenting the activities, Foale used the posture acquisition glove (PAG), which has delicate sensors attached to the tops of the fingers, to operate the handgrip dynamometer (HGD).

In early 2022, the Cold Operable Lunar Deployable Arm (COLDArm) project – led by NASA's Jet Propulsion Laboratory in Southern California – successfully integrated special gears into pieces of a robotic arm that is planned to perform a robot-controlled lunar surface experiment with imagery in the coming years. These bulk metallic glass (BMG) gears, integrated into COLDArm's joints and actuators, were developed through the Game Changing Development bulk metallic glass gears project to operate at extreme temperatures below minus 280 degrees Fahrenheit (minus 173 degrees Celsius). The gear alloys have a disordered atomic-scale structure, making them both strong and elastic enough to withstand these exceptionally low temperatures. Typical gearboxes require heating to operate at such cryogenic temperatures. The BMG gear motors have been tested and successfully operated at roughly minus 279 degrees Fahrenheit (minus 173 degrees Celsius) without heating assistance. This gear motor is one of the key technologies to enable the robotic arm to operate in extremely cold environments, such as during lunar night. Each of the four joints containing BMG gears will be tested once the arm is fully assembled, which is scheduled for spring of 2022. Robotic joint testing will include dynamometer testing to measure torque/rotational speed, as well as cryogenic thermal vacuum testing to understand how the equipment would perform in an environment similar to space. Once proven, the BMG gears and COLDArm capabilities will enable future missions to work in extreme environments on the Moon, Mars, and ocean worlds. https://photojournal.jpl.nasa.gov/catalog/PIA24567