
STS062-05-035 (4-18 March 1994) --- This 35mm frame, photographed on the aft flight deck of the earth-orbiting Space Shuttle Columbia, captures crew activity with the Dexterous End Effector (DEE) on the Remote Manipulator System (RMS). Astronauts Pierre J. Thuot and Marsha S. Ivins communicate with ground controllers during operations and observations with DEE. During the 14-day mission, three of the five STS-62 crewmembers took turns operating and observing the RMS in a series of one-hour sessions.
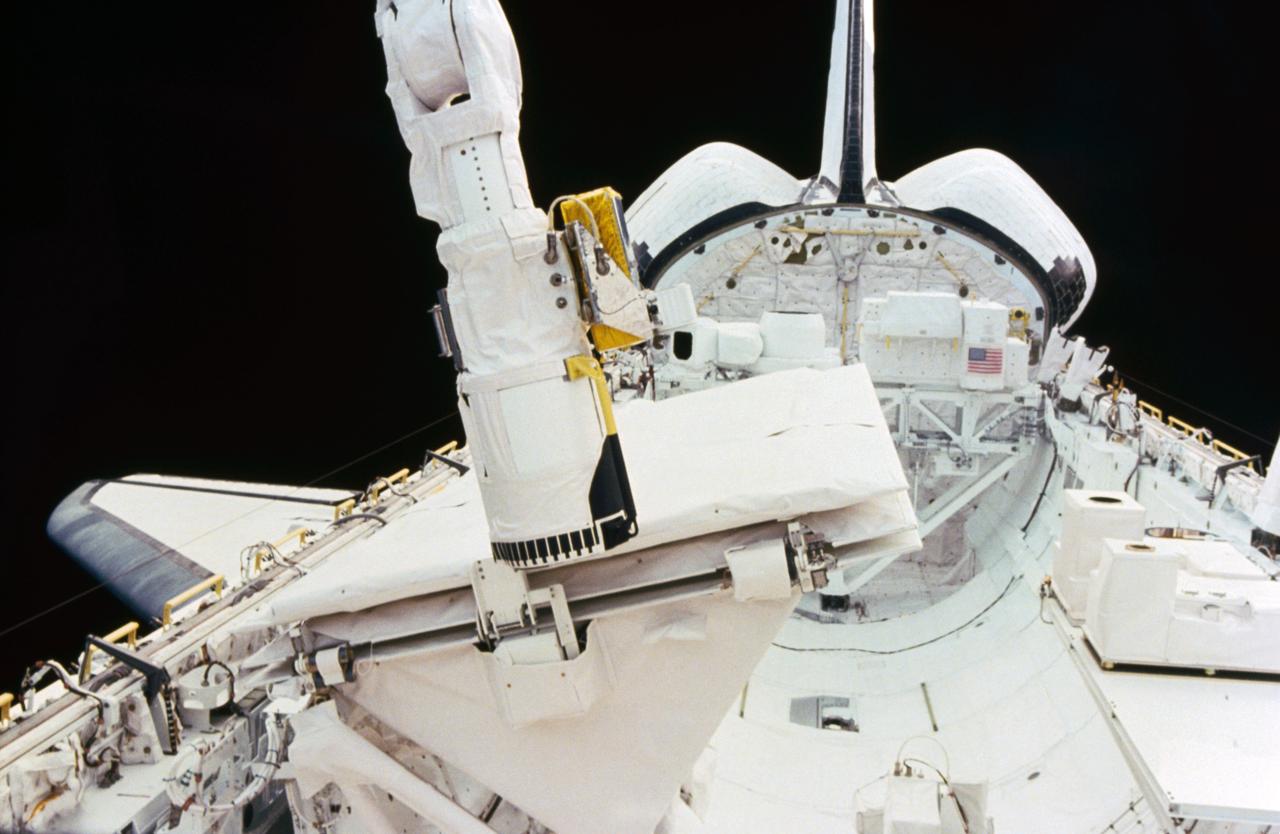
41G-03-008 (5-13 Oct. 1984) --- The end effector of the space shuttle Challenger's remote manipulator system (RMS) taps against the shuttle imaging radar's (SIR-B) antenna to secure it during NASA's 41-G mission. Photo credit: NASA

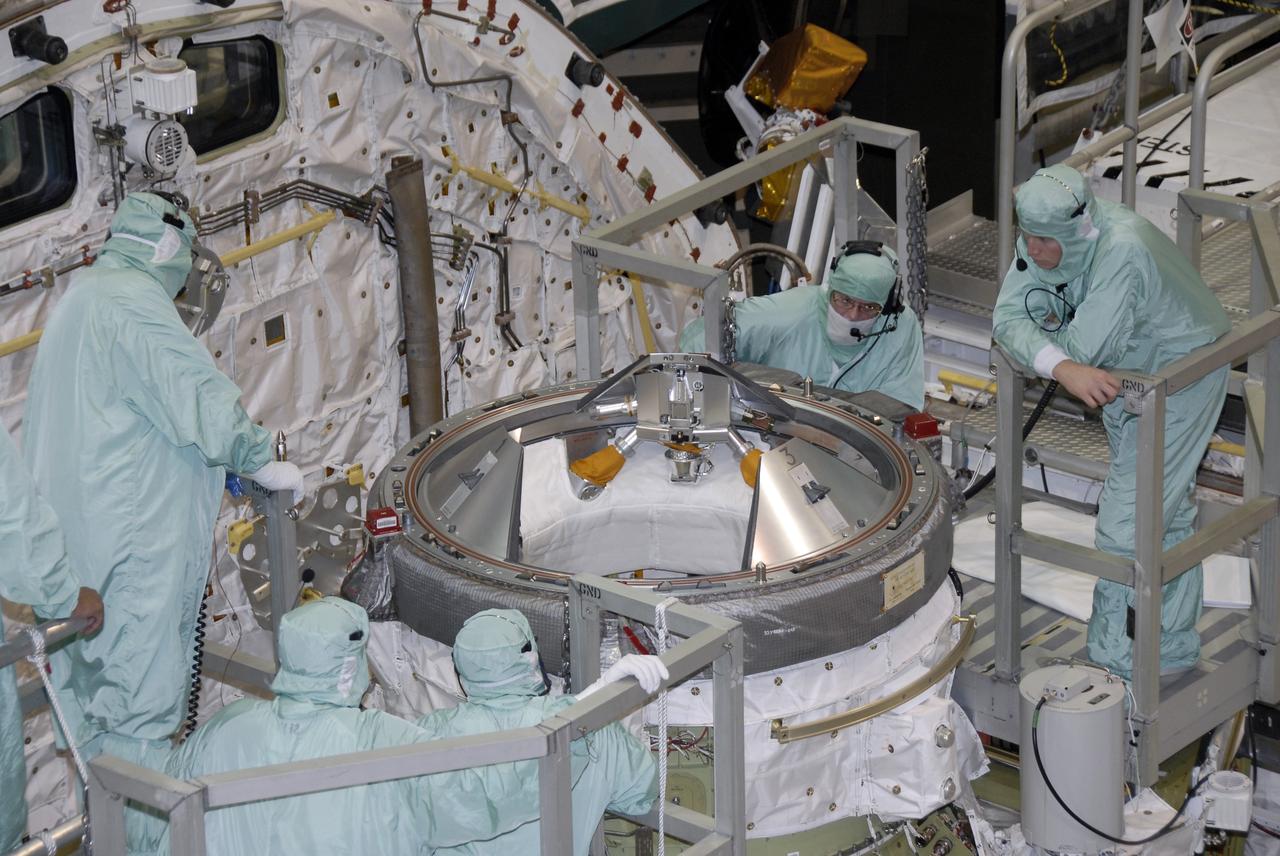
STS102-E-5201 (13 March 2001) --- A view of the interior of the end effector apparatus on the end of the Canadian-built remote manipulator system (RMS) arm. The photograph was taken with a digital still camera.

iss071e384199 (July 17, 2024) --- The Canadarm2 robotic arm's latching end effector, or LEE, is used to grapple fixtures on the International Space Station, as well as capture the approaching Cygnus cargo craft from Northrop Grumman and attach it to the Unity module for cargo transfer operations. 256 miles below the outpost is the Mediterranean coast of Libya and Egypt and the Greek island of Crete.
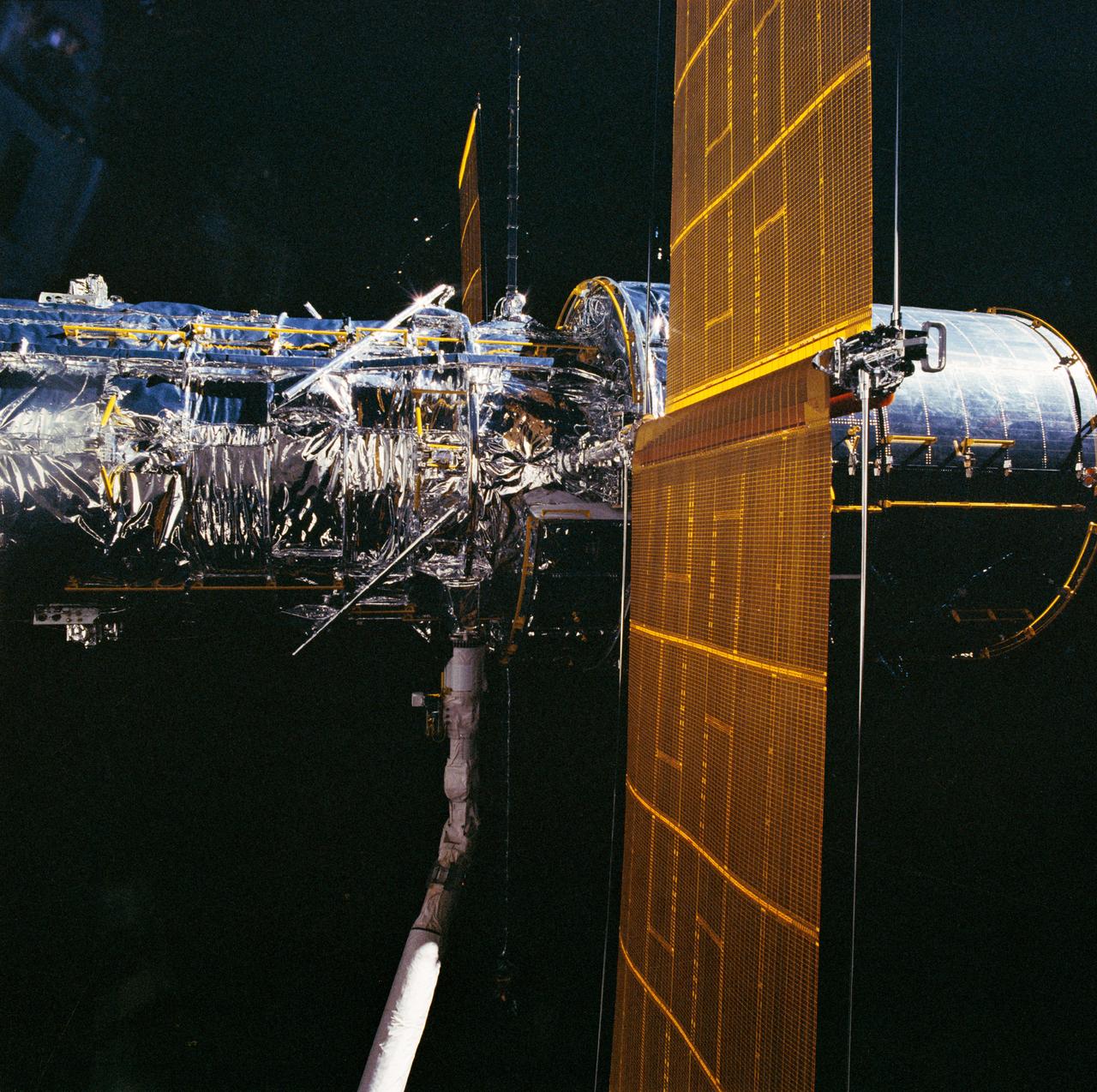
During STS-31, the Hubble Space Telescope (HST), grappled by the remote manipulator system (RMS) end effector, is held against the blackness of space. The two solar array (SA) wings (large gold panels) are fully extended with bistem cassette and secondary deployment mechanism (SDM) handle clearly visible. The two deployed high gain antennae (HGA) masts are parallel to the SA panels. RMS end effector is positioned on the starboard fixture during the predeployment checkout operations above Discovery's, Orbiter Vehicle (OV) 103's, payload bay (PLB).

View of the Canadarm2 Space Station Remote Manipulator System (SSRMS) Latching End Effector (LEE) taken against a backdrop of Earth and space during Expedition 35.

Spartan I satellte sits in the Discovery's payload bay prior to being deployed. Above it can be seen the remote manipulator system (RMS) arm and end effector. The Earth's horizon can also be seen above the orbiter.
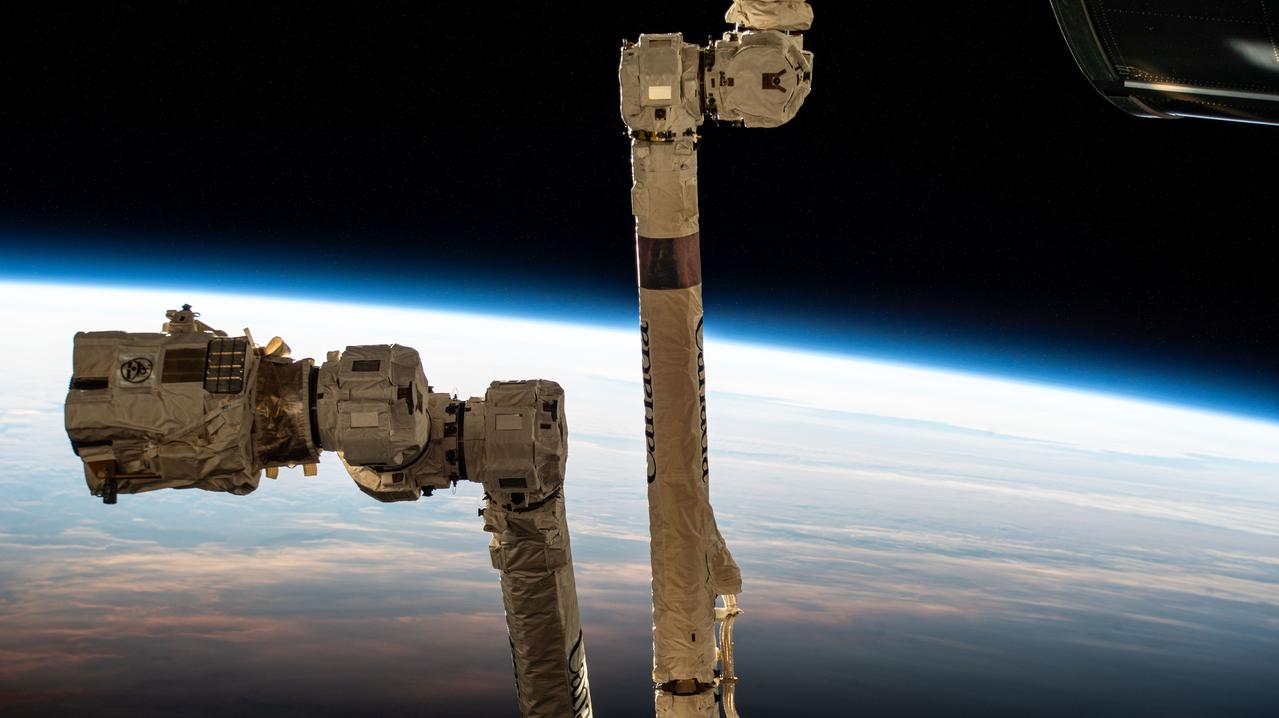
iss072e576480 (Jan. 31, 2025) --- The 57.7-foot-long Canadarm2 robotic arm with its latching end effector that can grapple spacecraft or maneuver spacewalkers is pictured as the International Space Station orbited into daylight 267 miles above the South Pacific Ocean just south of New Zealand's Auckland Islands.

iss072e574907 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.
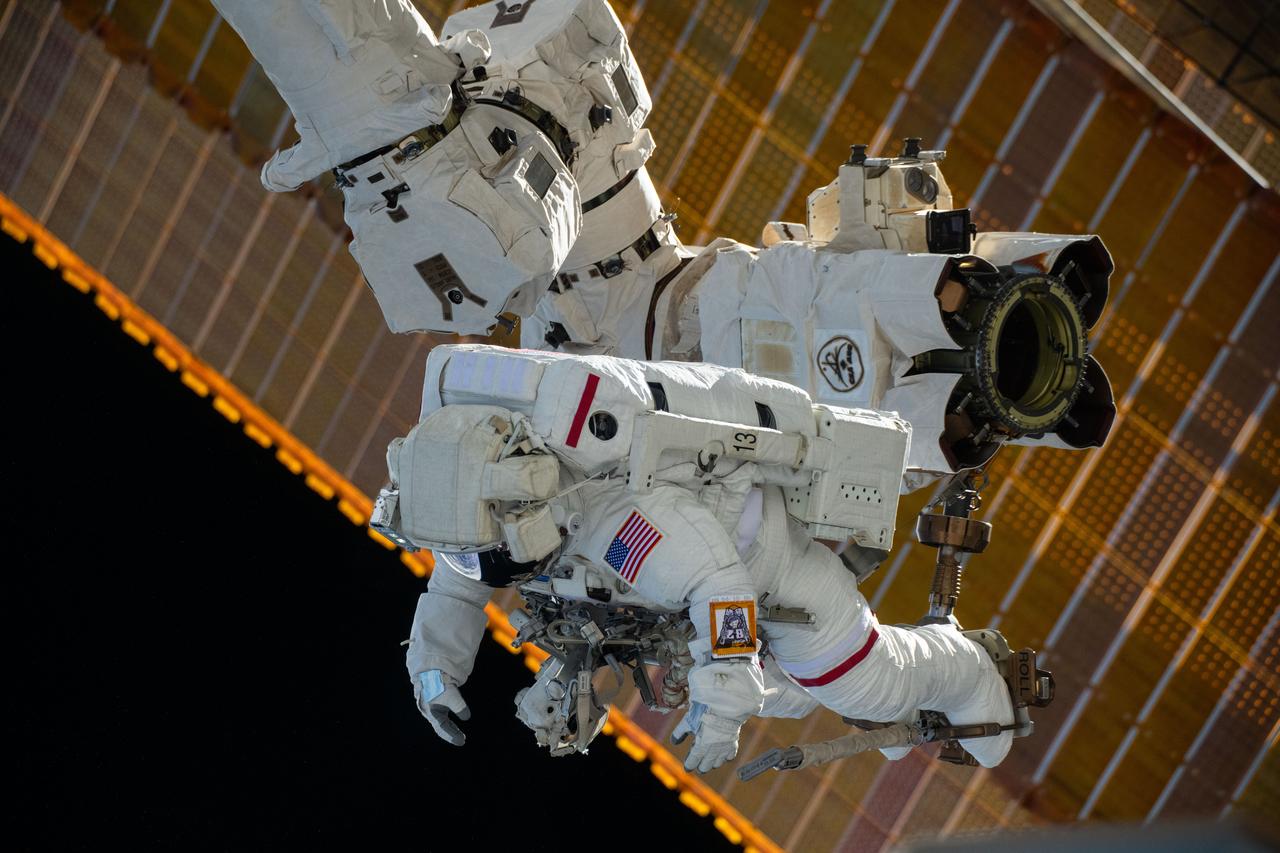
iss072e595491 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e595496 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e595502 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss054e022823 (Jan. 23, 2018) --- NASA astronaut Scott Tingle is pictured during a spacewalk to swap out a degraded robotic hand, or Latching End Effector, on the Canadarm2.
The ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station (ECOSTRESS), pictured at the bottom, and the Latching End Effector (LEE), pictured at the top, are integrated into the unpressurized SpaceX Dragon truck June 2, 2018, at the SpaceX facility on Cape Canaveral Air Force Station in Florida. The payloads will be carried to the International Space Station on SpaceX's 15th Commercial Resupply Services mission. ECOSTRESS will measure the temperature of plants and use that information to better understand how much water plants need and how they respond to stress. The Canadian Space Agency is supplying LEE for the Canadarm2 as a spare to replace a failed unit removed by astronauts during a spacewalk in 2017. Each end of the Canadarm2 robotic arm has an identical LEE, which acts like a "hand" to grapple payloads and visiting cargo spaceships.

STS039-17-017 (3 May 1990) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) as it approaches the remote manipulator system (RMS) end effector following a period of free-flight and data collection. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS. A huge blanket of white clouds obscures identifiable points on Earth, nearly 300 statute miles away. The target grappling apparatus on SPAS is clearly seen near bottom center of frame.

Hubble Space Telescope (HST), with its solar array (SA) wings and high gain antennae (HGA) fully extended,is released from Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS) end effector and is set free into Earth orbit by the STS-31 crew. HST drifts away from the end effector over the Andes Mountains.Parts of Bolivia, Peru, Chile, and Argentina are visible. The view covers a huge area of the western half of South America stretching from 14 degrees south latitude to 23 degrees, about 1,000 kilometers.

STS004-37-670 (27 June-4 July 1982) --- The North Atlantic Ocean southeast of the Bahamas serves as backdrop for this 70mm scene of the Columbia?s remote manipulator system (RMS) arm and hand-like device (called and end effector) grasping a multi-instrument monitor for detecting contaminants. The experiments is called the induced environment contaminant monitor (IECM). The small box contains 11 instruments for checking the contaminants in and around the orbiter?s cargo bay which might adversely affect delicate experiments carried onboard. Astronauts Thomas K. Mattingly II and Henry W. Hartsfield Jr. manned the Columbia for seven days and one hour. The Columbia?s vertical tail and orbital maneuvering system (OMS) pods are at left foreground. Photo credit: NASA

During STS-31, the Hubble Space Telescope (HST) grappled by the remote manipulator system (RMS) end effector is held in appendage deploy position above Discovery, Orbiter Vehicle (OV) 103. The solar array (SA) bistem cassette has been released from its latch fittings. The bistem spreader bars begin to unfurl the SA wing. The secondary deployment mechanism (SDM) handle is visible at the SA end. Stowed against either side of the HST System Support Module (SSM) forward shell are the high-gain antennae (HGA). Puerto Rico and the Dominican Republic are recognizable at the left of the frame.
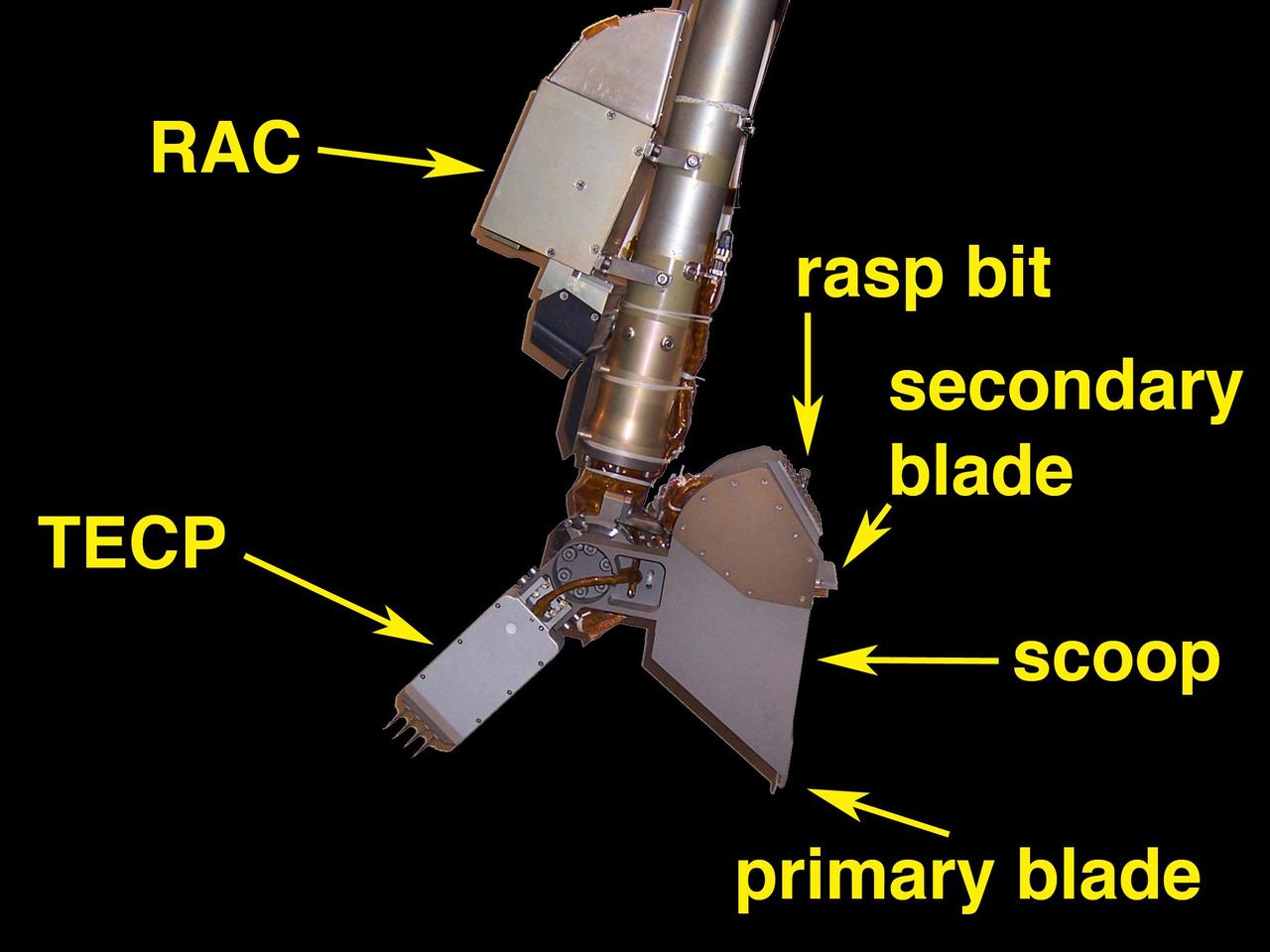
Image illustrates the tools on the end of the arm that are used to acquire samples, image the contents of the scoop, and perform science experiments.

STS-31 Mission Specialist (MS) Bruce McCandless II (left), wearing an extravehicular mobility unit (EMU), maneuvers his way around a mockup of the remote manipulator system (RMS) end effector during an underwater simulation in JSC's Weightless Environment Training Facility (WETF) Bldg 29 pool. The end effector is attached to a grapple fixture on the Hubble Space Telescope (HST) mockup. As McCandless performs contingency extravehicular activity (EVA) procedures, fellow crewmember MS Kathryn D. Sullivan, in EMU, works on the opposite side of the HST mockup, and SCUBA-equipped divers monitor the activity. Though no EVA is planned for STS-31, the two crewmembers train for contingencies that would necessitate leaving the shirt sleeve environment of Discovery's, Orbiter Vehicle (OV) 103's, crew cabin and performing chores with the HST payload or related hardware in the payload bay (PLB).

STS057-93-052 (24 June 1993) --- The European Retrievable Carrier (EURECA) is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The photo was taken after EURECA's "capture" from Earth-orbit but prior to its berthing in the Shuttle's cargo bay. The southern two-thirds of the state of Florida, part of the Gulf of Mexico and clouds over the Atlantic form the backdrop for the 70mm image.
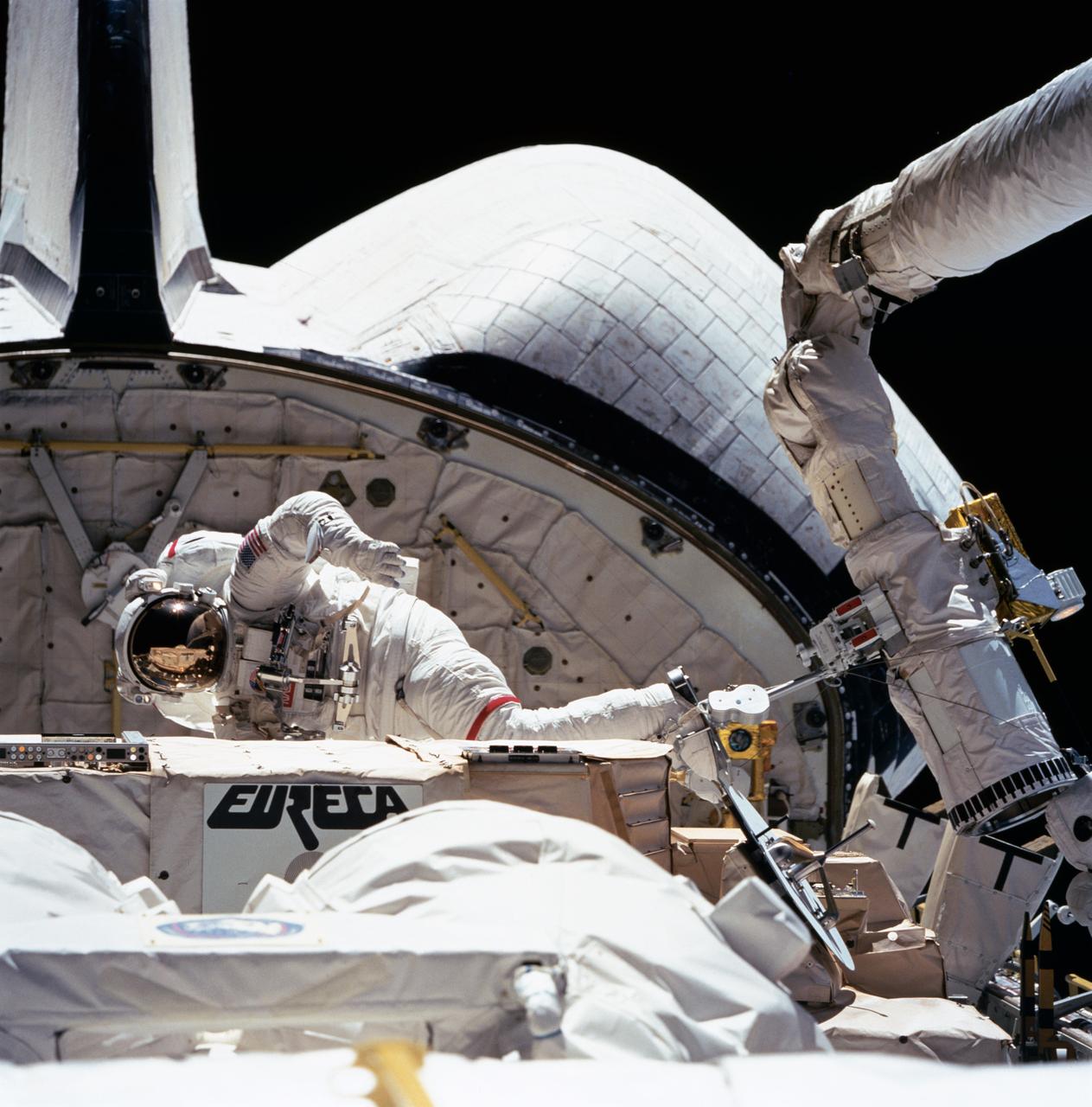
The darkness of space forms the backdrop for this extravehicular activity (EVA) scene captured by one of the STS-57 crewmembers in Endeavour's, Orbiter Vehicle (OV) 105's, crew cabin. Pictured near the recently "captured" European Retrievable Carrier (EURECA) at frame center is Mission Specialist (MS) and Payload Commander (PLC) G. David Low. Suited in an extravehicular mobility unit (EMU), Low, anchored to the remote manipulator system (RMS) via a portable foot restraint (PFR) (manipulator foot restraint (MFR)), is conducting Detailed Test Objective (DTO) 1210 procedures. Specifically, this activity will assist in refining several procedures being developed to service the Hubble Space Telescope (HST) on mission STS-61 in December 1993. The PFR is attached to the RMS end effector via a PFR attachment device (PAD). Partially visible in the foreground is the Superfluid Helium Onorbit Transfer (SHOOT) payload.

S84-27021 (7 Feb 1984) --- Astronaut Bruce McCandless II, 41B mission specialist tests a "cherry-picker" type device during February 7 historical Extravehicular Activity (EVA). The EVA, in which Astronauts McCandless and Robert L. Stewart, two of three STS-41B mission specialists, participated, marked two firsts--initial use of both the Mobile Foot Restraint (MFR) attached to the Remote Manipulator System (RMS) arm here, and the Manned Maneuvering Unit (MMU) backpack (not seen in this frame). The Challenger was flying with its aft end aimed toward the Earth. This photograph clearly shows where the MFR connects to the end effector of the Canadian-built RMS arm. The two spacewalkers were monitored and photographed by their fellow crewmembers, astronauts Vance D. Brand, commander; Robert L. Gibson, pilot; and Ronald E. McNair, mission specialist. The three remained in the cabin for another EVA session two days later. Photo Credit: NASA

41C-02-067 (6-13 April 1984) --- One of the first major accomplishments of Flight 41-C?s crew aboard the Challenger was to place this giant satellite into Earth orbit. Still attached to the remote manipulator system (RMS) end effector, the Long-Duration Exposure Facility (LDEF) is backdropped against Florida, the Bahama Bank, the Gulf of Mexico and Atlantic waters. The multi-colored cylinder carries 50-odd passive scientific experiments representing 194 investigators from around world. The LDEF program is directed by the Langley Research Center in Hampton, Virginia. The facility will be retrieved in a little less than a year by a Space Shuttle crew. This frame was one of the visuals used by the 41-C astronauts for their April 24, 1984 post-flight press conference. Cape Canaveral, where this seven-day mission got its start, and Lake Okeechobee, are easily recognized in the frame, photographed shortly before 11:30 a.m. (CST), April 7, 1984.
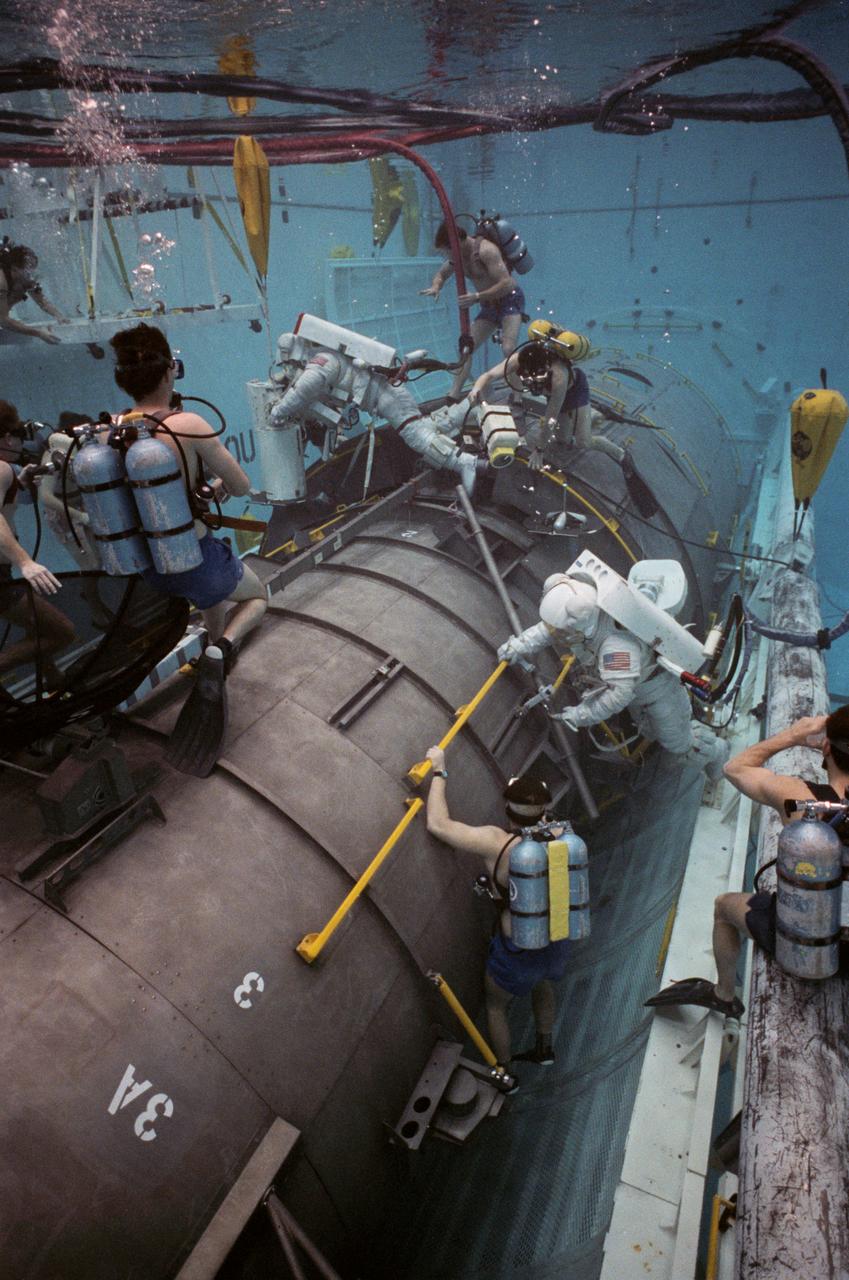
This overall view shows STS-31 Mission Specialist (MS) Bruce McCandless II (left) and MS Kathryn D. Sullivan making a practice space walk in JSC's Weightless Environment Training Facility (WETF) Bldg 29 pool. McCandless works with a mockup of the remote manipulator system (RMS) end effector which is attached to a grapple fixture on the Hubble Space Telescope (HST) mockup. Sullivan manipulates HST hardware on the Support System Module (SSM) forward shell. SCUBA-equipped divers monitor the extravehicular mobility unit (EMU) suited crewmembers during this simulated extravehicular activity (EVA). No EVA is planned for the Hubble Space Telescope (HST) deployment, but the duo has trained for contingencies which might arise during the STS-31 mission aboard Discovery, Orbiter Vehicle (OV) 103. Photo taken by NASA JSC photographer Sheri Dunnette.

S127-E-008579 (25 July 2009) --- The Japanese Experiment Module - Exposed Facility is seen from inside Kibo on flight day eleven.

STS080-708-084 (19 Nov.-7 Dec. 1996) --- Backdropped against the blackness of space and a cloud covered portion of Earth, the Wake Shield Facility (WSF) is turned loose by the space shuttle Columbia's Remote Manipulator System (RMS) to begin a period of free-flight. The image was photographed with a handheld 70mm camera aimed through windows on Columbia's aft flight deck.

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, technicians prepare for a latching end effector to be lifted by crane from a work stand. The effector will be installed on an EXPRESS Logistics Carrier for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, technicians prepare for a latching end effector to be lifted from a work stand. The effector will be installed on an EXPRESS Logistics Carrier for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, technicians check the bottom of a latching end effector being lifted by crane from a work stand. The effector will be installed on an EXPRESS Logistics Carrier for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

iss071e329982 (July 12, 2024) --- Northrop Grumman's Cygnus space freighter is attached to the leading end effector of the 57.7-foot-long Canadarm2 robotic arm about to be released into Earth orbit ending a five-and-a-half month cargo mission berthed to the International Space Station's Unity module.

iss071e329978 (July 12, 2024) --- Northrop Grumman's Cygnus space freighter is attached to the leading end effector of the 57.7-foot-long Canadarm2 robotic arm about to be released into Earth orbit ending a five-and-a-half month cargo mission berthed to the International Space Station's Unity module.

iss071e329977 (July 12, 2024) --- Northrop Grumman's Cygnus space freighter is attached to the leading end effector of the 57.7-foot-long Canadarm2 robotic arm about to be released into Earth orbit ending a five-and-a-half month cargo mission berthed to the International Space Station's Unity module.

iss071e329969 (July 12, 2024) --- Northrop Grumman's Cygnus space freighter is attached to the leading end effector of the 57.7-foot-long Canadarm2 robotic arm about to be released into Earth orbit ending a five-and-a-half month cargo mission berthed to the International Space Station's Unity module.

iss070e098229 (Feb. 22, 2024) --- At left, the Canadarm2 robotic arm maneuvers the NanoRacks Bishop airlock in the grip of its latching end effector. At top right, a UHF antenna extends from the forward end of the Destiny laboratory module, which is also attached to the Harmony module.

S114-E-5746 (29 July 2005) --- A mass of storm clouds was photographed by a STS-114 crewmember onboard the Space Shuttle Discovery. Part of the Orbiter Boom Sensor system end effector is also visible in the frame.
STS003-21-080 (22-30 March 1982) --- Plasma Diagnostics Package (PDP) grappled by remote manipulator system (RMS) end effector is positioned above payload bay (PLB) at sunrise. Photo credit: NASA

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, a latching end effector is lowered by crane toward an EXPRESS Logistics Carrier on which it will be installed for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, a technician guides a latching end effector as it is lowered by crane toward an EXPRESS Logistics Carrier on which it will be installed for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, technicians prepare to secure a latching end effector to the EXPRESS Logistics Carrier on which it is being installed for flight. The carrier is part of the STS-129 payload on space shuttle Atlantis, which will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Dimitri Gerondidakis

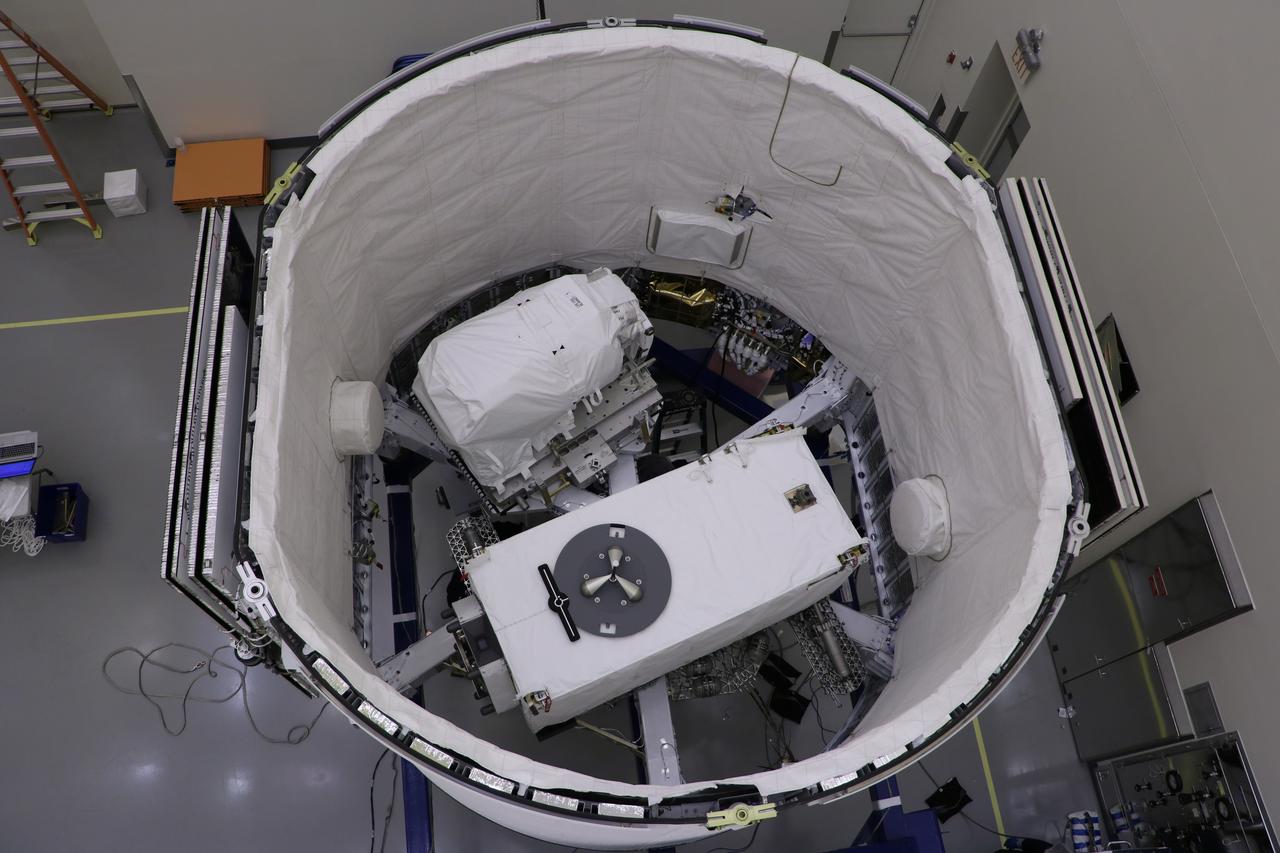
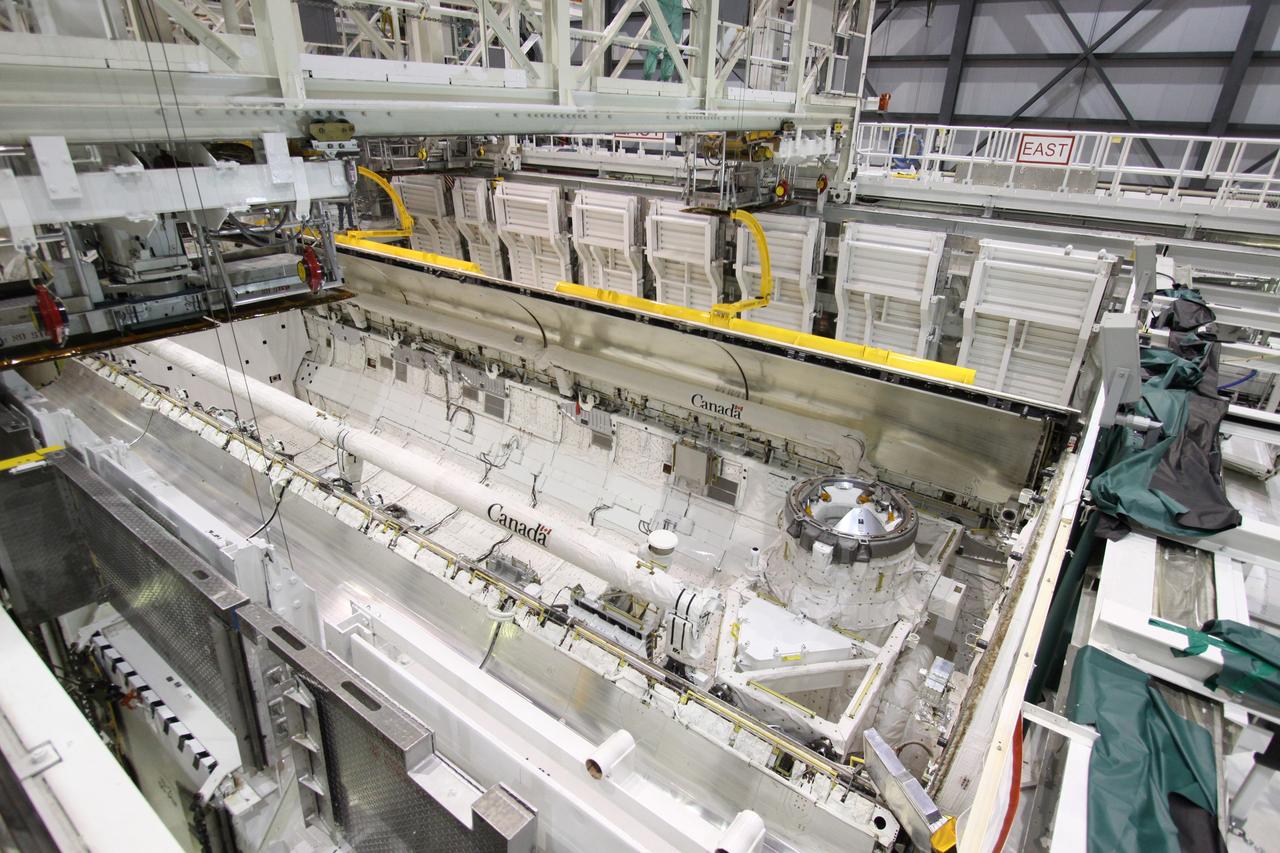
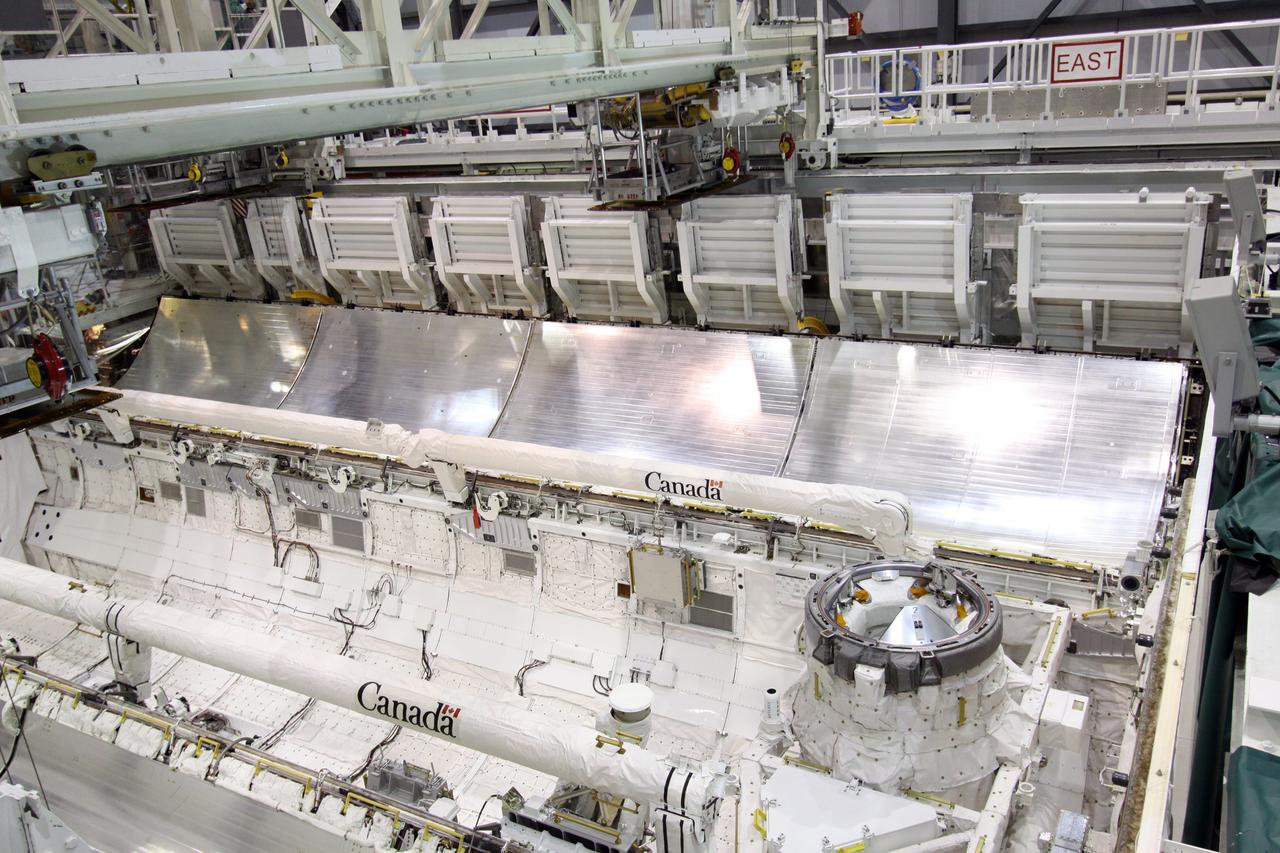
Workers in the in the Space Station Processing Facility move two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement.. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000
Workers guide a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) in the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

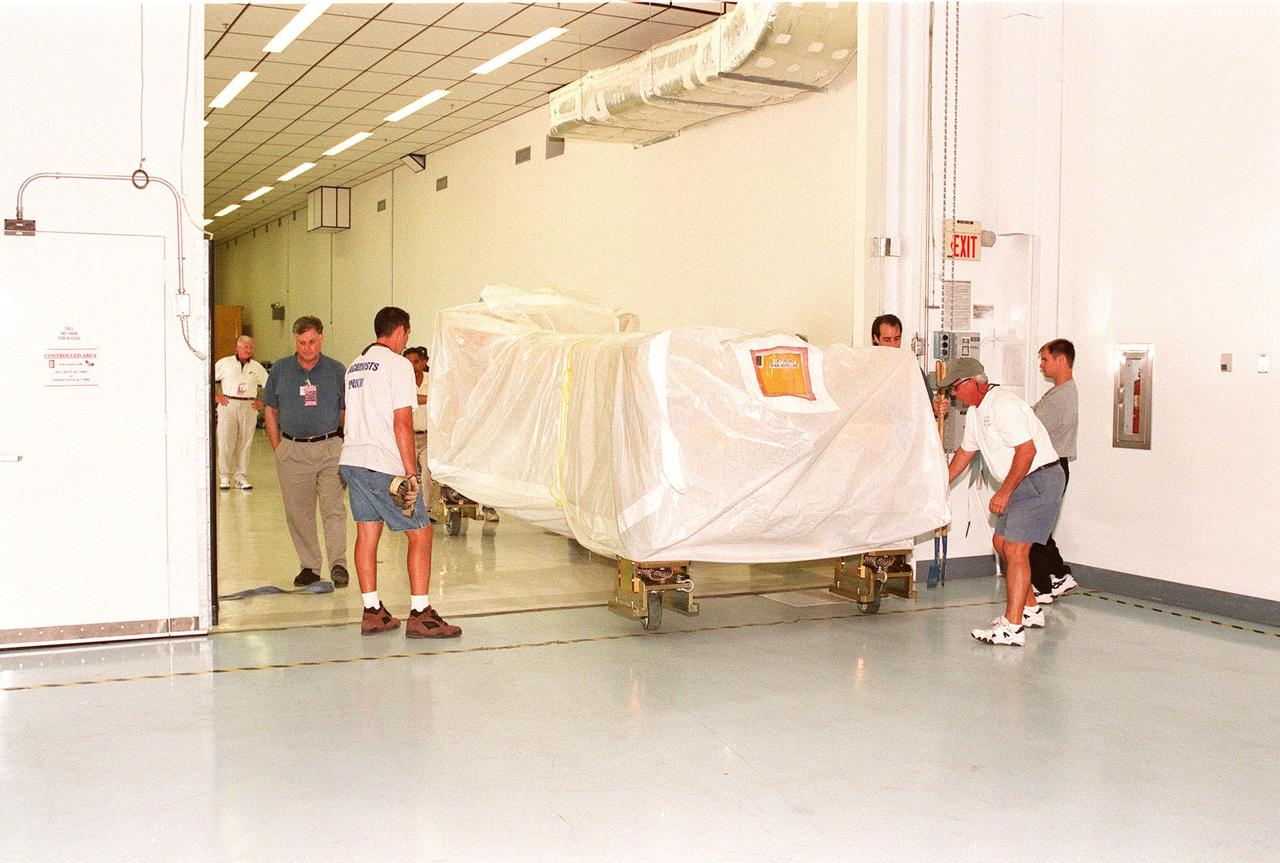
Workers move a box containing a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) into the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at the Space Station Processing Facility at KSC to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
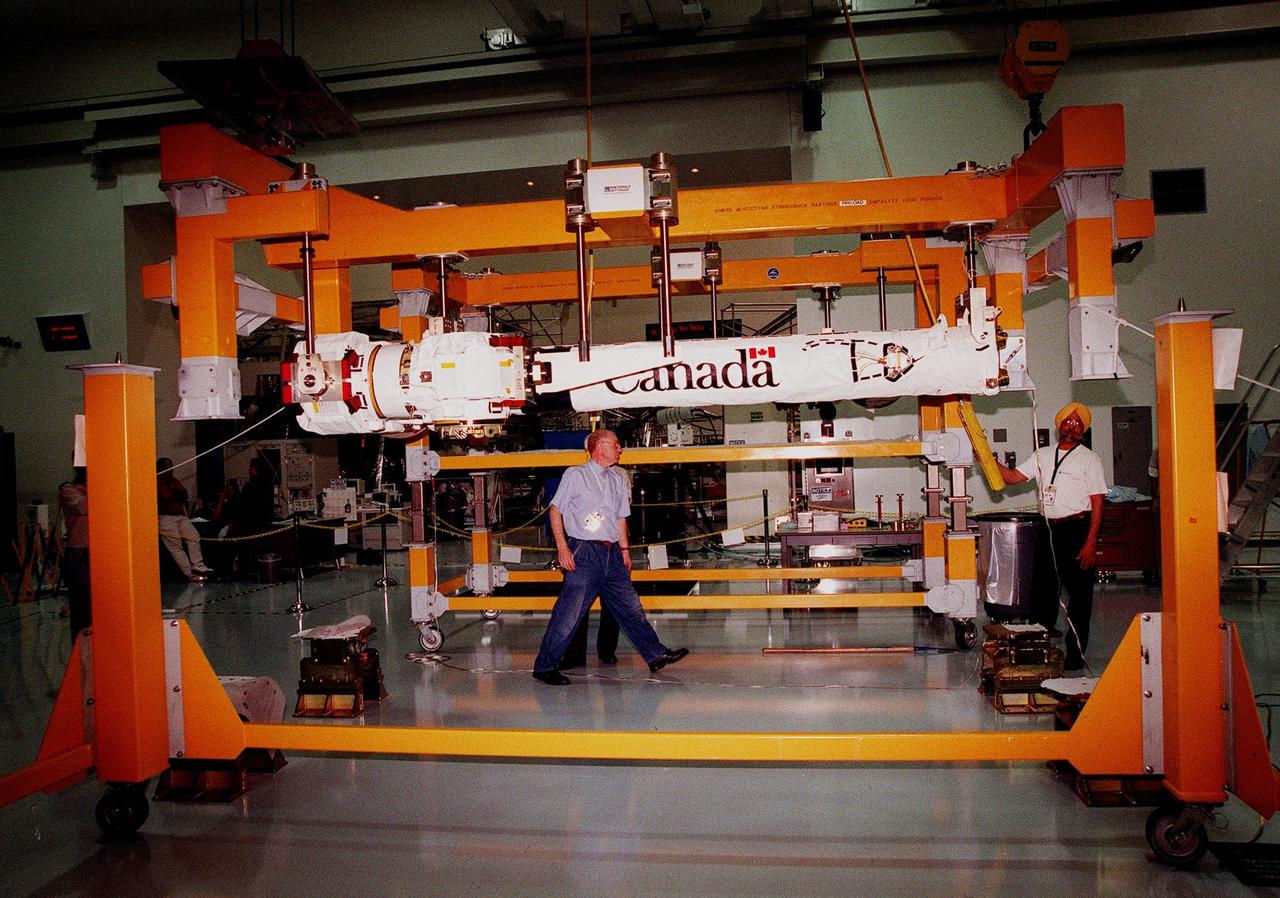
Workers in the Space Station Processing Facility raise a segment of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to move it to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000
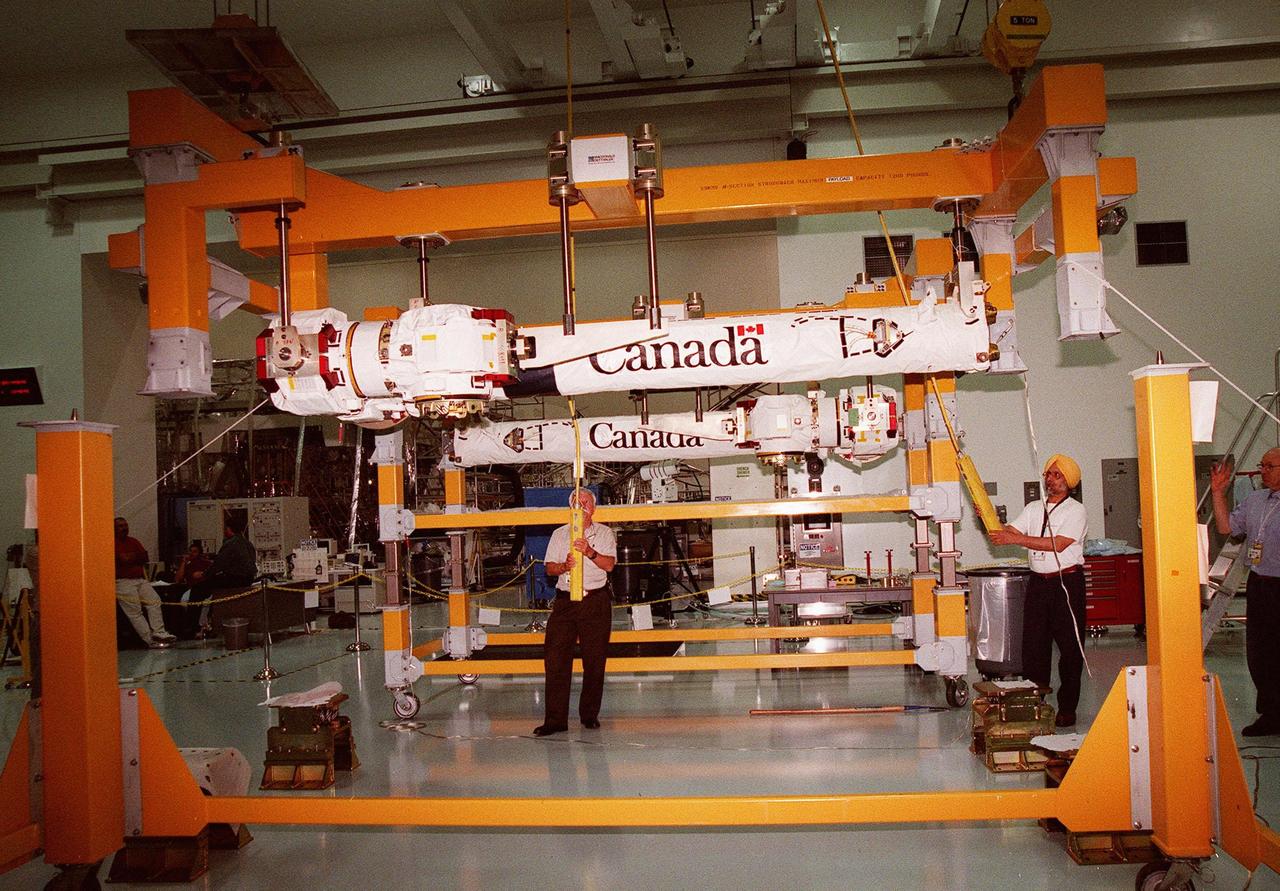
Workers in the Space Station Processing Facility raise two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000
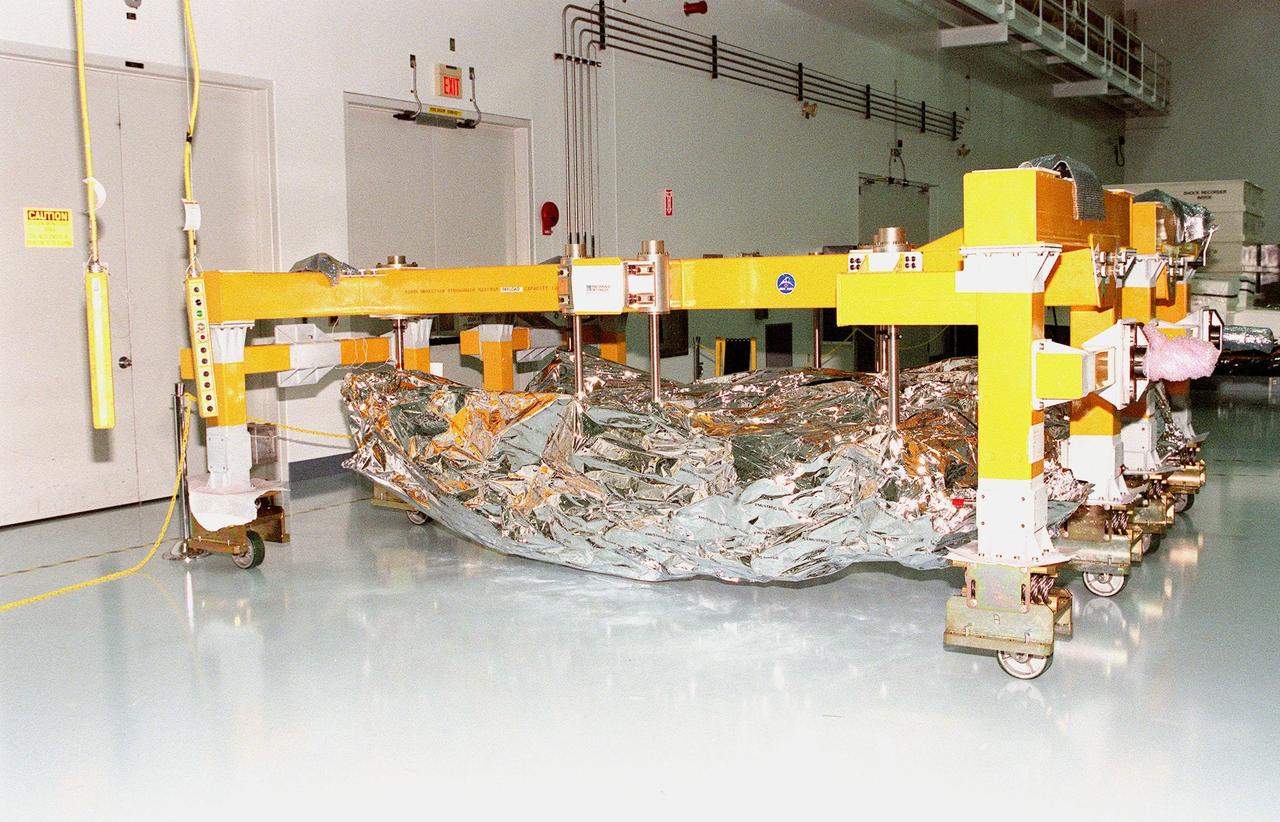
Segments of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) are lined up in the Space Station Processing Facility at KSC. They will undergo a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

In the Space Station Processing Facility, two workers perform prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

Workers uncrate a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) in the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at Kennedy Space Center to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

In the Space Station Processing Facility, a worker performs prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at the Space Station Processing Facility at KSC to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

In the Space Station Processing Facility, workers perform prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

Workers guide a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) past the Leonardo Multi-Purpose Logistics Module in the Space Station Processing Facility at KSC. The segment joins two others for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

51D-44-046 (17 April 1985) --- The Space Shuttle Discovery's Remote Manipulator System (RMS) arm and two specially designed extensions move toward the troubled Syncom-IV (LEASAT) communications satellite during a station keeping mode of the two spacecraft in Earth orbit. Inside the Shuttle's cabin, astronaut Rhea Seddon, 51D mission specialist, controlled the Canadian-built arm in an attempt to move an external lever on the satellite. Crewmembers learned of the satellite's problems shortly after it was deployed from the cargo bay on April 13, 1985. The arm achieved physical contact with the lever as planned. However, the satellite did not respond to the contact as hoped. A 70mm handheld Hassellblad camera, aimed through Discovery's windows, recorded this frame -- one of the first to be released to news media following return of the seven-member crew on April 17, 1985.

STS072-726-051 (15 Jan. 1996) --- The Office of Aeronautics and Space Technology (OAST) Flyer satellite begins its period of free flight, as it is let go by the end effector of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The crewmembers retrieved the satellite two days later.
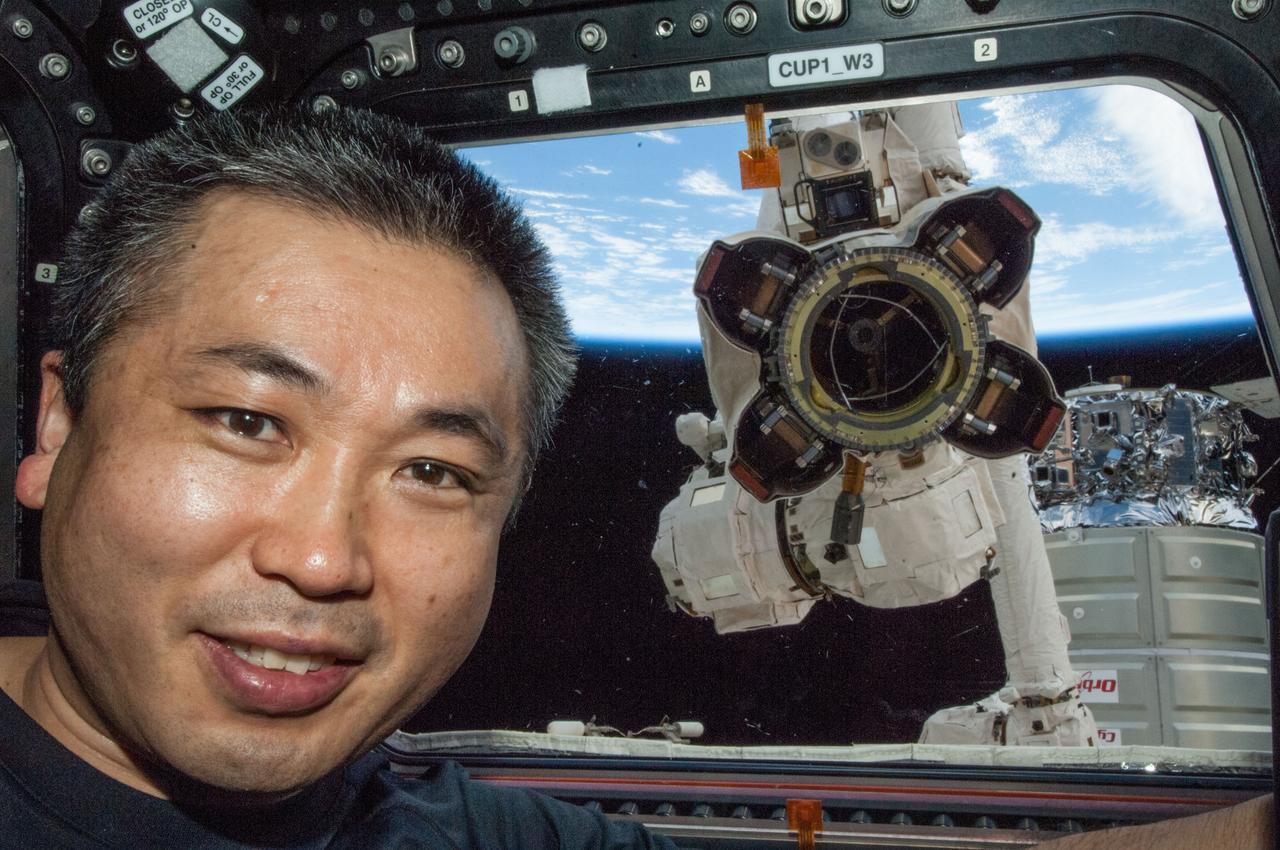
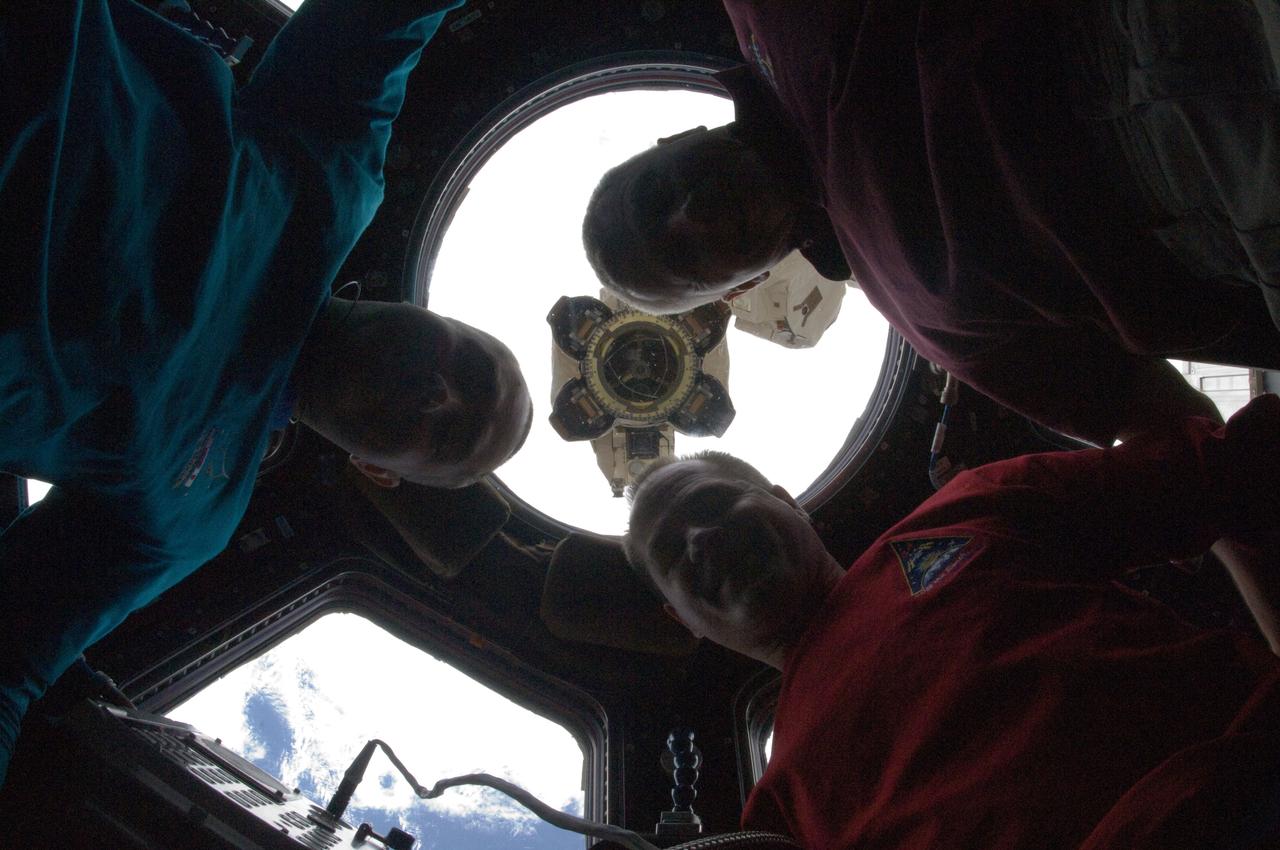
ISS038-E-030425 (13 Jan. 2014) --- Japan Aerospace Exploration Agency astronaut Koichi Wakata, Expedition 38 flight engineer, poses for a photo at a window in the Cupola of the International Space Station while the Canadarm2 robotic arm's Latching End Effector (LEE) appears to be looking through the window from outside the station.

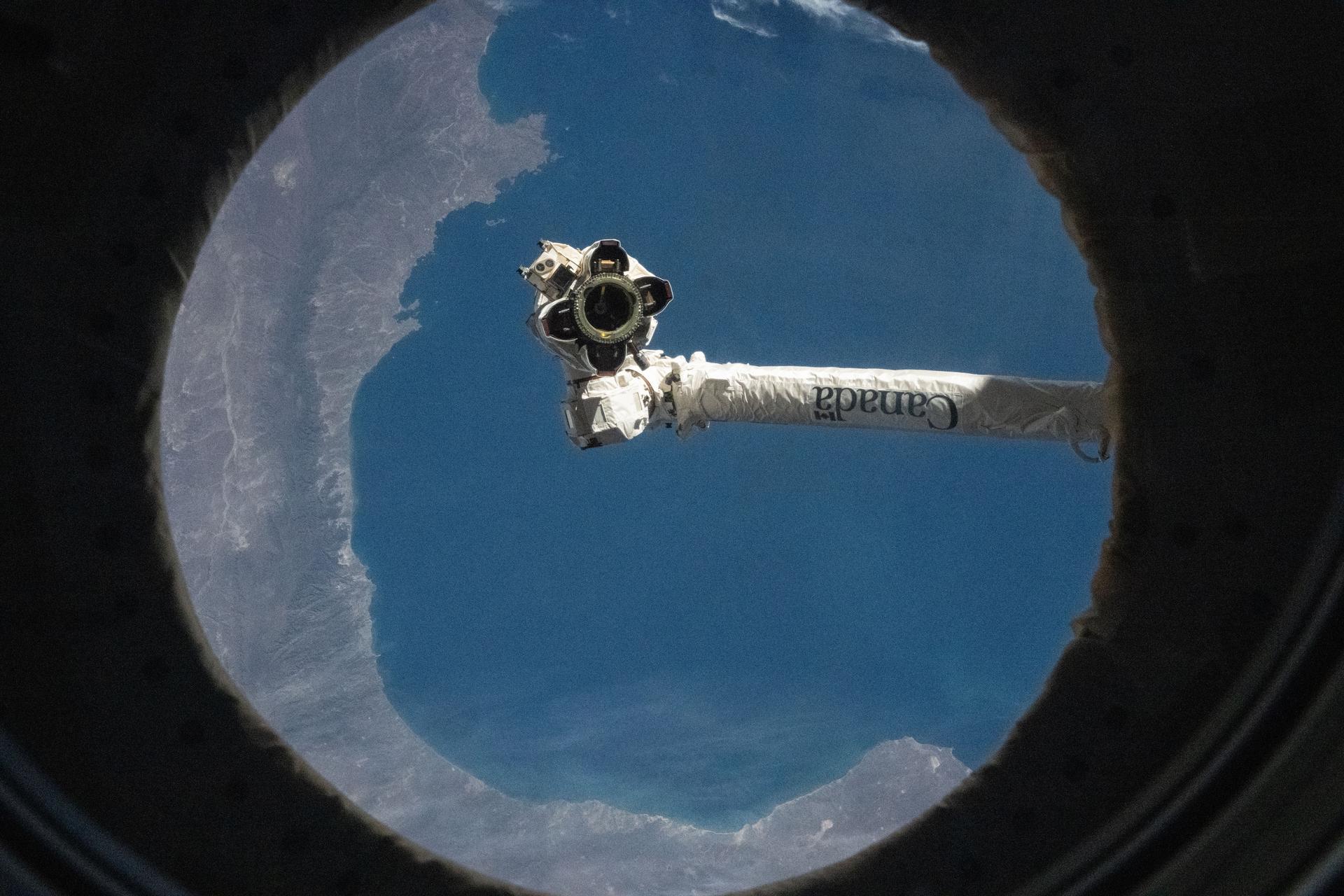
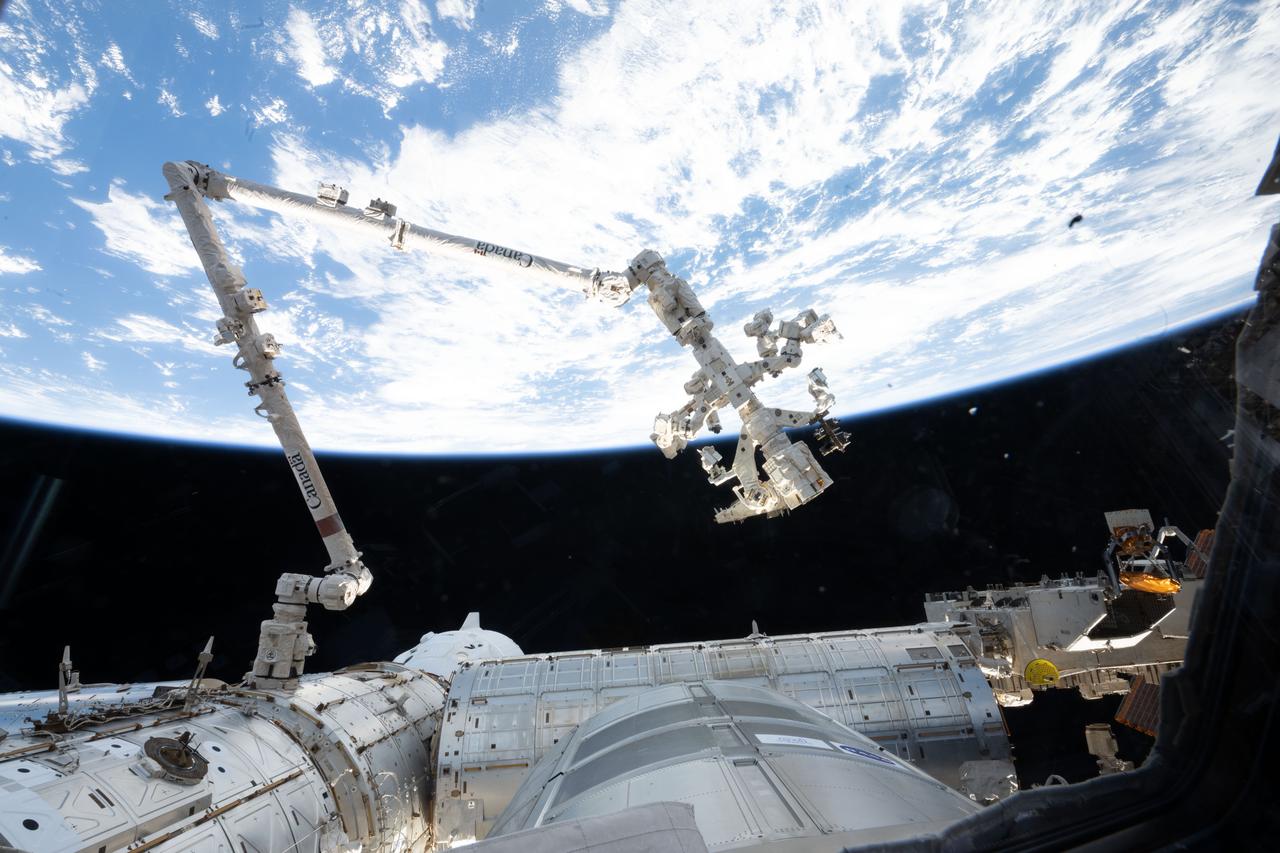
ISS038-E-015406 (12 Dec. 2013) --- The Canadarm2 and its end effector are featured in this image photographed by an Expedition 38 crew member from a window in the Cupola of the International Space Station. A blue and white part of Earth provides the backdrop for the scene.

ISS033-E-012353 (16 Oct. 2012) --- Japan Aerospace Exploration Agency astronaut Aki Hoshide, Expedition 33 flight engineer, uses a still camera to photograph the Canadarm2 robotic arm?s Latching End Effector (LEE) from a window in the Cupola of the International Space Station.

iss074e0431548 (March 31, 2026) --- A waxing gibbous Moon is pictured above Earth's atmosphere from the International Space Station as it soared 268 miles above far eastern Canada. A portion of the Canadarm2 robotic arm's latching end effector is captured in the top foreground of the image. Credit: NASA/Chris Williams
STS103-707-010 (19-27 December 1999) --- The end effector of the Remote Manipulator System (RMS, right center) on the Space Shuttle Discovery awaits the arrival of the approaching Hubble Space Telescope (HST, out of frame) prior to telescope capture.

iss054e022826 (Jan. 23, 2018) --- NASA astronaut Scott Tingle is pictured during a spacewalk to swap out a degraded robotic hand, or Latching End Effector, on the Canadarm2. NASA astronaut Mark Vande Hei also participated in the robotics maintenance spacewalk.

iss063e098775 (Sept. 30, 2020) --- The tip of the Canadarm2 robotic arm, also called the Latching End Effector which grapples hardware, science experiments and approaching spaceships, is pictured as the International Space Station soared over the South Pacific Ocean and into an orbital sunrise.

ISS033-E-012341 (16 Oct. 2012) --- NASA astronaut Sunita Williams, Expedition 33 commander, uses a still camera to photograph the Canadarm2 robotic arm?s Latching End Effector (LEE) from a window in the Cupola of the International Space Station.

iss056e032401 (June 21, 2018) --- Canada's 57.7-foot-long robotic arm, also known as the Canadarm2, with a latching end effector at its tip (used to grapple approaching spacecraft and portable data grapple fixtures) is pictured in foreground as the International Space Station was orbiting over the Caspian Sea.

ISS033-E-012329 (16 Oct. 2012) --- NASA astronaut Sunita Williams, Expedition 33 commander, uses a still camera to photograph the Canadarm2 robotic arm?s Latching End Effector (LEE) from a window in the Cupola of the International Space Station.

ISS033-E-012340 (16 Oct. 2012) --- NASA astronaut Sunita Williams, Expedition 33 commander, uses a still camera to photograph the Canadarm2 robotic arm?s Latching End Effector (LEE) from a window in the Cupola of the International Space Station.
iss074e0378958 (March 12, 2026) --- The Canadarm2 robotic arm's latching end effector, or LEE, is pictured from a window on the International Space Station after it had released Norrthrop Grumman's Cygnus XL cargo spacecraft into Earth orbit ending its resupply mission. The orbitial outpost was soaring 271 miles above the Atlantic Ocean off the coast of southern Argentina when this photograph was taken. Credit: NASA/Chris Williams

STS039-19-015 (28 April- 6 May 1991) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) on the end of the remote manipulator system (RMS) end effector. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS.

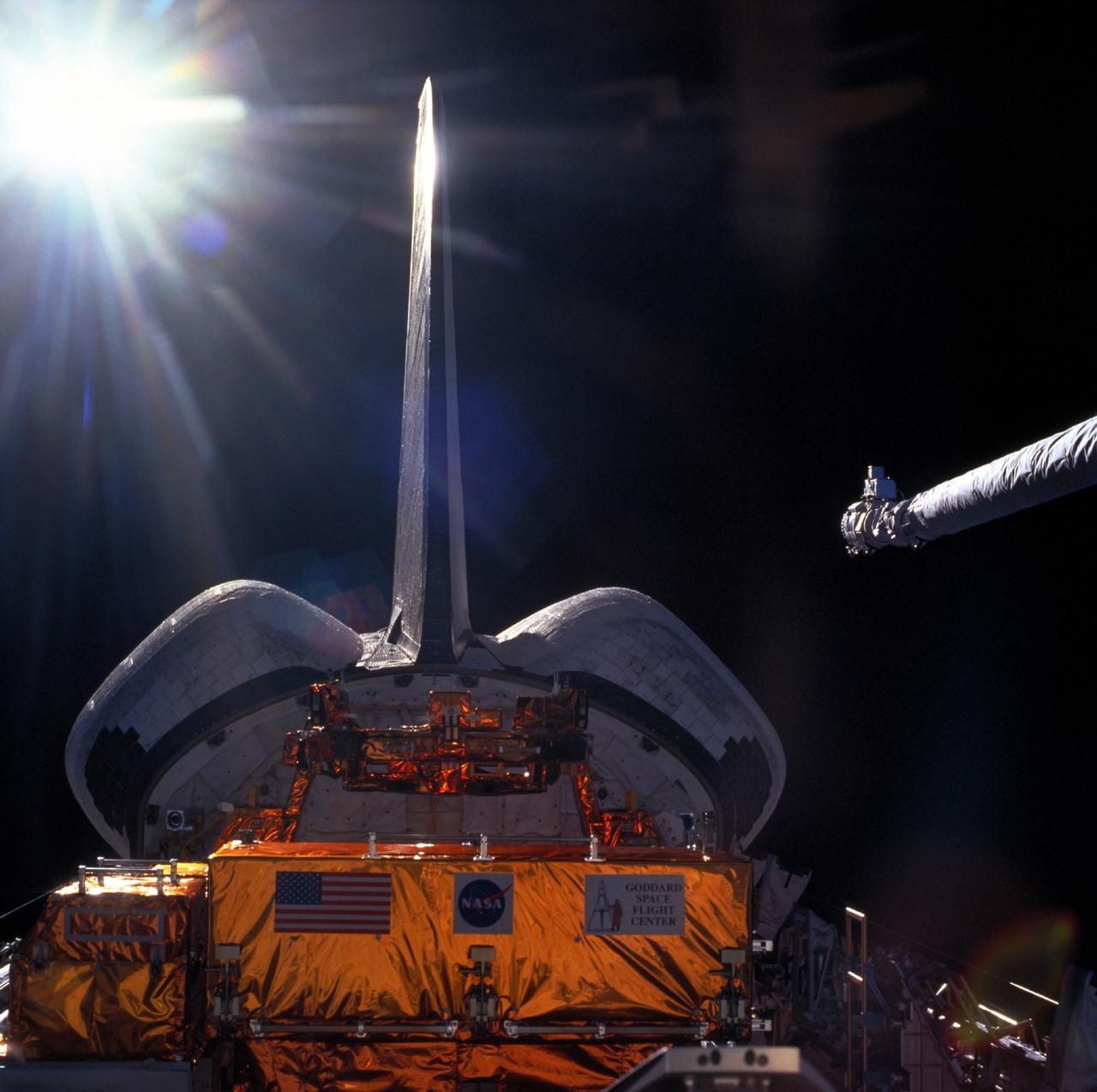
S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5053 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The Spacehab module can be seen in the foreground. The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

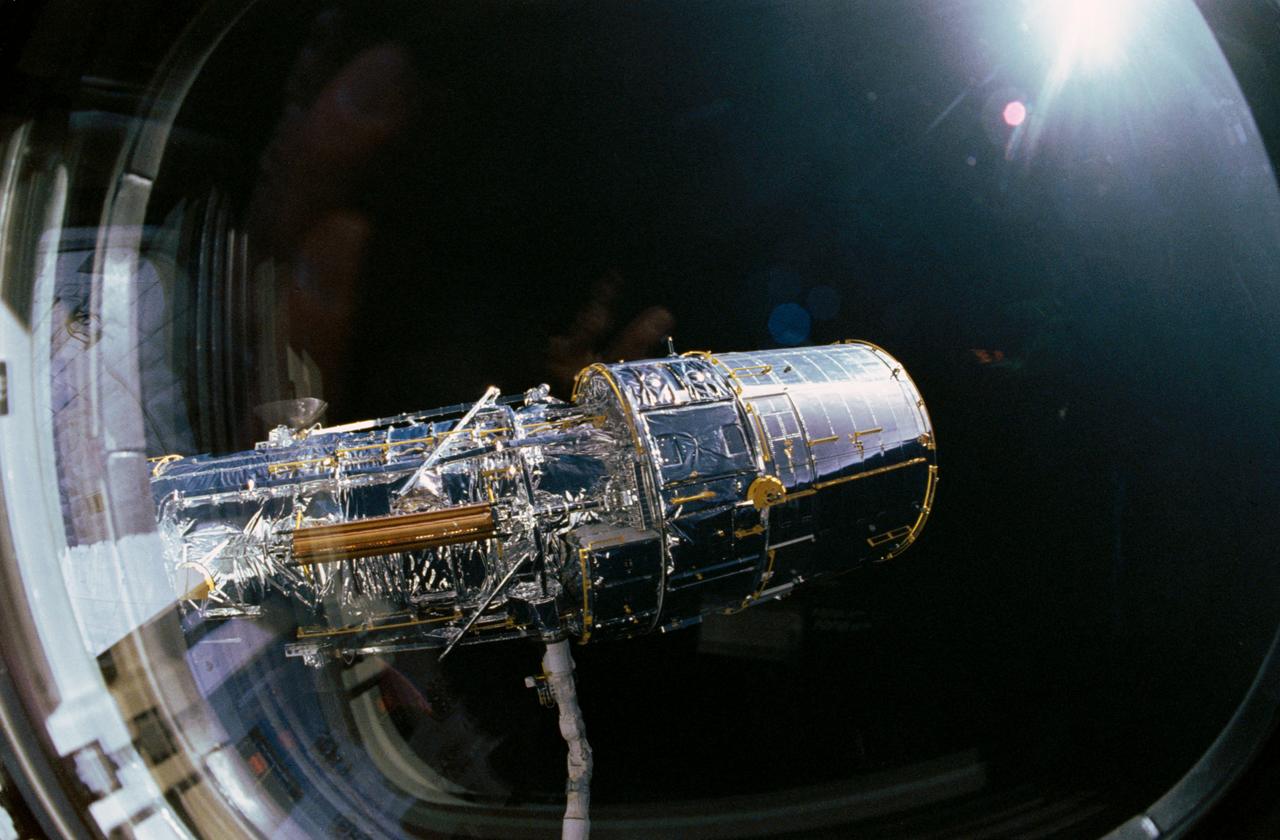
STS031-76-026 (25 April 1990) --- Most of the giant Hubble Space Telescope (HST) can be seen as it is suspended in space by Discovery's Remote Manipulator System (RMS) following the deployment of part of its solar panels and antennae. The photo was taken with a handheld Hasselblad camera. This was among the first photos NASA released on April 30, 1990, from the five-day STS 31 mission.

S77-E-5052 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.
View taken through overhead window W7 aboard Discovery, Orbiter Vehicle (OV) 103, shows the Hubble Space Telescope (HST) grappled by the remote manipulator system (RMS) and held in a 90 degree pitch position against the blackness of space. The solar array (SA) panel (center) and the high gain antennae (HGA) (on either side) are visible along the Support System Module (SSM) forward shell prior to deployment during STS-31.
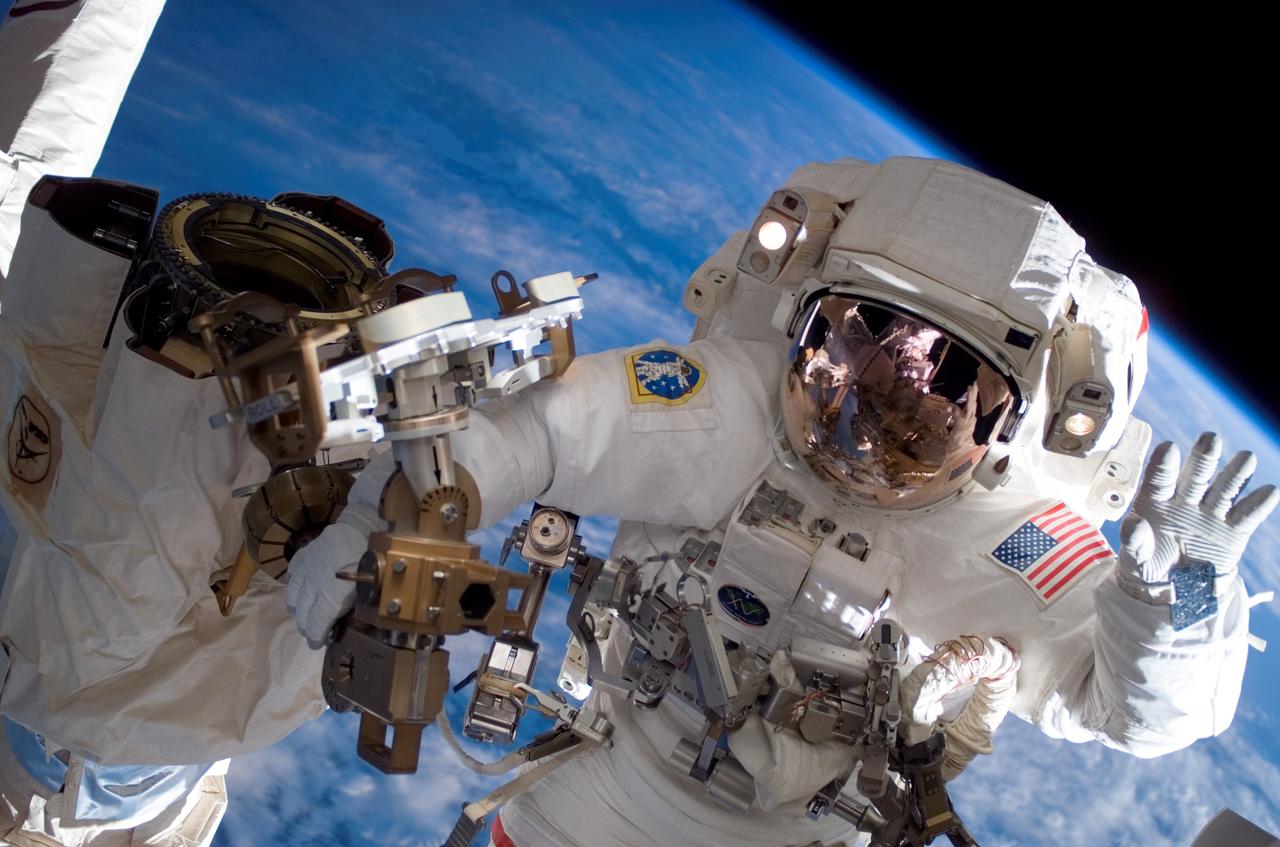
ISS015-E-18958 (23 July 2007) --- Astronaut Clay Anderson, Expedition 15 flight engineer, waves to the camera while participating in a session of extravehicular activity (EVA) as construction continues on the International Space Station. During the 7-hour 41-minute spacewalk, Anderson and cosmonaut Fyodor N. Yurchikhin (out of frame), commander representing Russia's Federal Space Agency, installed a television camera stanchion, reconfigured a power supply for an antenna assembly, and performed several get-ahead tasks. Also, while riding on the end of the Canadarm2, Anderson jettisoned the Early Ammonia Servicer (EAS) by shoving it opposite of the station's direction of travel. The station's robotic arm end effector is at left.
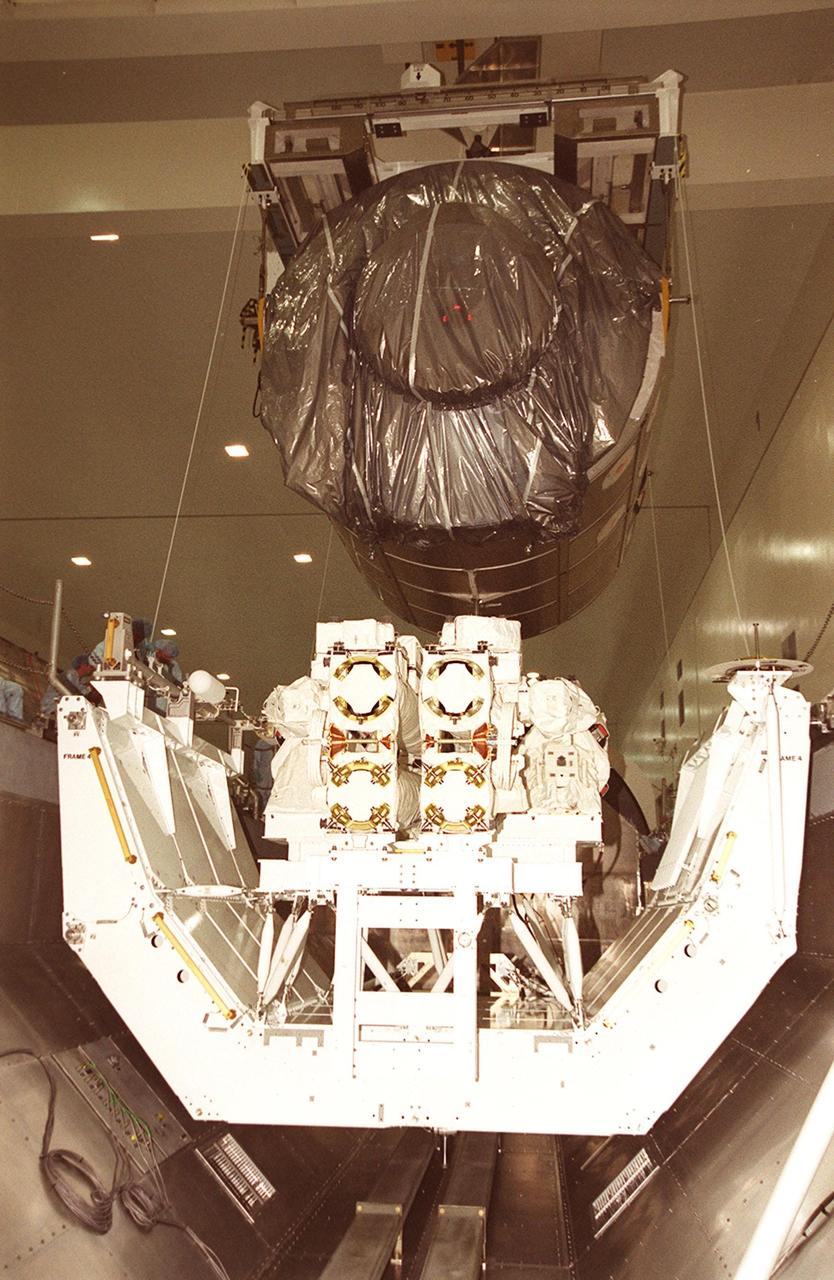
Viewed from the end, the Multi-Purpose Logistics Module Raffaello is lowered into the payload canister behind the Canadian robotic arm, SSRMS, already in place. Both elements are part of the payload on mission STS-100 to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The arm has seven motorized joints and is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Launch of STS-100 is scheduled for April 19, 2001 at 2:41 p.m. EDT from Launch Pad 39A

STS032-85-029 (12 Jan. 1990) --- (ORIENT PHOTO WITH COLUMBIA'S CARGO BAY IN LOWER CENTER). This 70mm frame was taken during a battery of documentary photographs of the recently-recaptured Long Duration Exposure Facility (LEDF). The Atlantic Coast of Namibia serves as a backdrop for the colorful scene. After five-and-one half years orbiting Earth, LDEF was retrieved by STS-32 crewmembers and brought back home at the end of the eleven-day mission for scientific observation. The bus-sized spacecraft was held in the grasp of Columbia's remote manipulator system (RMS) end effector during the survey.
CAPE CANAVERAL, Fla. – In Orbiter Processing Facility 1 at NASA's Kennedy Space Center in Florida, space shuttle Atlantis' payload bay door is closing. The designated shuttle for the STS-129 mission, Atlantis will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. Atlantis is targeted to launch Nov. 12. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – Inside the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, a crane lifts the EXPRESS Logistics Carrier tomove it to a stand. The carrier is part of the payload on space shuttle Atlantis, which will deliver to the International Space Station components including two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. – In NASA Kennedy Space Center's Orbiter Processing Facility 1, technicians begin a functional test on the orbital docking system on space shuttle Atlantis. The STS-129 mission will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Kim Shiflett

iss072e574914 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams works outside the International Space Station during a five-hour and 26-minute spacewalk to remove and stow a radio frequency group antenna assembly. In the left foreground, is the latching end effector of the Canadarm2 robotic arm. The orbital outpost was soaring 258 miles above the Pacific Ocean near the coast of Mexico at the time of this photograph.

CAPE CANAVERAL, Fla. – In NASA Kennedy Space Center's Orbiter Processing Facility 1, technicians prepare to test the orbital docking system on space shuttle Atlantis. The STS-129 mission will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Kim Shiflett

iss073e0981126 (Oct. 16, 2025) --- Roscosmos cosmonaut Sergey Ryzhikov is pictured attached to the end effector of the European robotic arm, holding the high-resolution camera (HRC) monoblock he removed during a six-hour and nine-minute spacewalk outside the International Space Station's Roscosmos segment. The HRC monoblock is part of a scientific optical telescope system designed to test compact radio-optical detectors for Earth observation, ecological monitoring, and emergency response.
ISS034-E-010955 (27 Nov. 2012) --- NASA astronaut Kevin Ford (lower right), Expedition 34 commander; along with Russian cosmonauts Evgeny Tarelkin (left) and Oleg Novitskiy, both flight engineers, are partially silhouetted as they pose for a photo in the Cupola of the International Space Station. The Canadarm2 robotic arm's Latching End Effector (LEE) is visible through a window in the background.

iss072e595424 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

STS080-330-023 (19 Nov.-7 Dec. 1996) --- Astronaut Thomas D. Jones, STS-80 mission specialist, operates the Remote Manipulator System (RMS) controls during operations with the Wake Shield Facility (WSF). When this picture was taken, the part time free-flying WSF was in the grasp of the RMS' end effector, as evidenced by the scene on the space shuttle Columbia's aft flight deck monitor in upper right.

CAPE CANAVERAL, Fla. – In NASA Kennedy Space Center's Orbiter Processing Facility 1, technicians prepare to test the orbital docking system on space shuttle Atlantis. The STS-129 mission will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Kim Shiflett

STS077-702-039 (19-29 May 1996) --- The Space Shuttle Endeavour?s Canadian-built Remote Manipulator System (RMS) arm is extended against a panoramic Earth/space background. In a traditional gesture, the view was chosen by the crew members to represent their unique position to view such scenes. A lengthy portion of the South African coast in Sun glint and a Sun burst/flare effect flank the end effector of the RMS.
CAPE CANAVERAL, Fla. – In NASA Kennedy Space Center's Orbiter Processing Facility 1, technicians begin testing the orbital docking system on space shuttle Atlantis. The STS-129 mission will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. STS-129 is targeted to launch Nov. 12. Photo credit: NASA/Kim Shiflett
CAPE CANAVERAL, Fla. – In Orbiter Processing Facility 1 at NASA's Kennedy Space Center in Florida, space shuttle Atlantis' payload bay doors are being closed. The designated shuttle for the STS-129 mission, Atlantis will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. Atlantis is targeted to launch Nov. 12. Photo credit: NASA/Jack Pfaller
CAPE CANAVERAL, Fla. – In Orbiter Processing Facility 1 at NASA's Kennedy Space Center in Florida, space shuttle Atlantis' payload bay doors are being closed. The designated shuttle for the STS-129 mission, Atlantis will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. Atlantis is targeted to launch Nov. 12. Photo credit: NASA/Jack Pfaller

iss072e595426 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams is attached to the Canadarm2 robotic arm's latching end effector while being maneuvered to her worksite 264 miles above the South Pacific Ocean. Williams removed and stowed a radio frequency group antenna assembly during the five-hour and 26-minute spacewalk outside the International Space Station.

iss072e574847 (Jan. 30, 2025) --- NASA astronaut and Expedition 72 Commander Suni Williams works outside the International Space Station during a five-hour and 26-minute spacewalk to remove and stow a radio frequency group antenna assembly. In the left foreground, is the latching end effector of the Canadarm2 robotic arm. The orbital outpost was soaring 267 miles above New Zealand at the time of this photograph.
iss073e0575226 (July 23, 2025) --- The 57.7-foot-long Canadarm2 robotic arm extends from a data grapple fixture on the International Space Station’s Harmony module. Attached to its latching end effector is Dextre, the station’s fine-tuned robotic hand designed for delicate external maintenance tasks. The SpaceX Dragon crew spacecraft, partially obscured, is docked to Harmony’s forward port 259 miles above a cloudy Pacific Ocean southwest of Mexico.

ISS014-E-09786 (14 Dec. 2006) --- European Space Agency (ESA) astronaut Christer Fuglesang, STS-116 mission specialist, participates in the mission's second of three planned sessions of extravehicular activity (EVA) as construction resumes on the International Space Station. Astronaut Robert L. Curbeam, Jr. (out of frame), mission specialist, also participated in the spacewalk. The station's Canadarm2 end effector is at left.

ISS030-E-048067 (22 Jan. 2012) --- With hardware from the Earth-orbiting International Space Station appearing in the near foreground, a night time European panorama reveals city lights from Belgium and the Netherlands at bottom center, the British Isles partially obscured by solar array panels at left, the North Sea at left center, and Scandinavia at right center beneath the end effector of the Space Station Remote Manipulator System or Canadarm2.
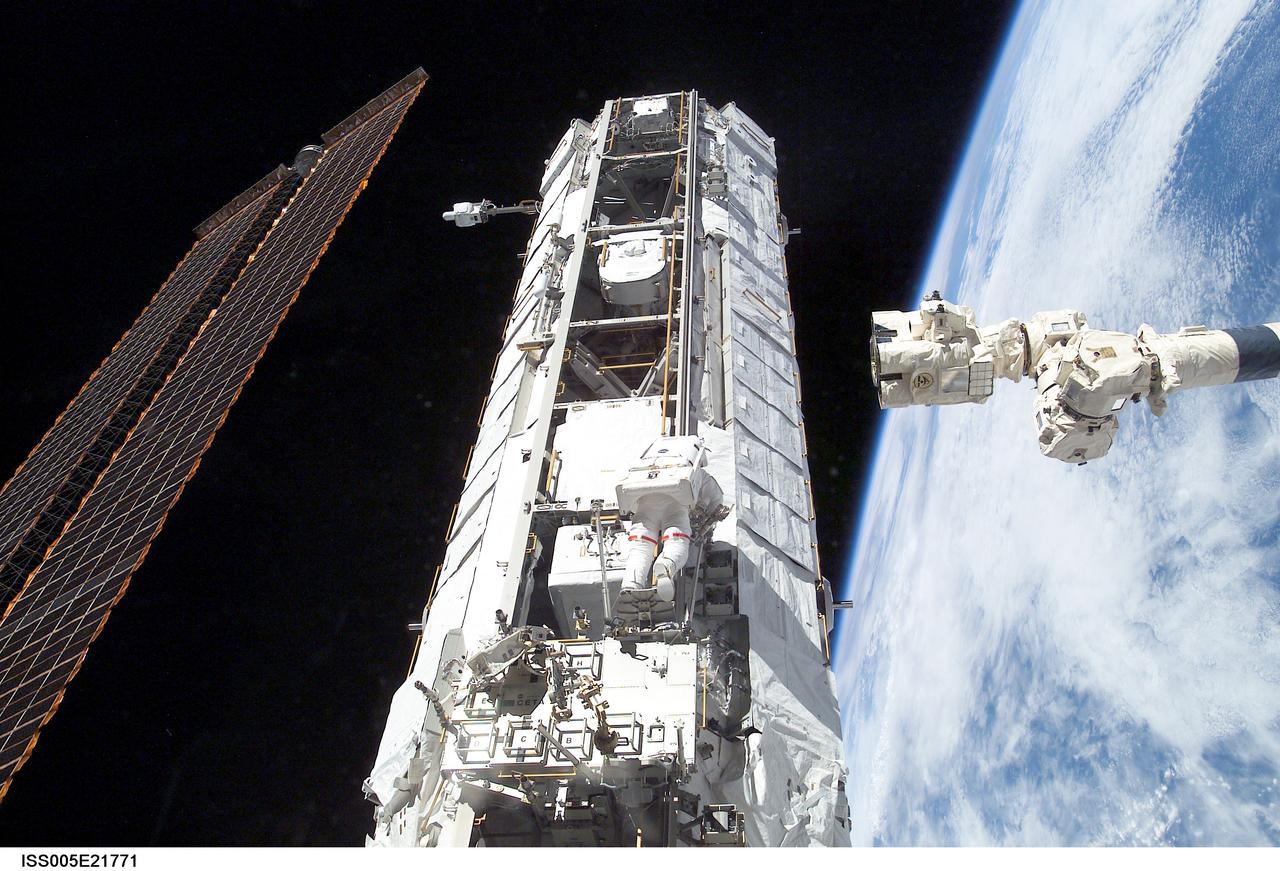
ISS005-E-21771 (28 November 2002) --- Astronaut Michael E. Lopez-Alegria, STS-113 mission specialist, works on the newly installed Port One (P1) truss on the International Space Station (ISS) during a session of extravehicular activity (EVA). The end effector of the Canadarm2 / Space Station Remote Manipulator System (SSRMS) and Earth’s horizon are visible in right frame.
CAPE CANAVERAL, Fla. – In Orbiter Processing Facility 1 at NASA's Kennedy Space Center in Florida, the payload bay doors are being closed on space shuttle Atlantis. The designated shuttle for the STS-129 mission, Atlantis will deliver to the International Space Station two spare gyroscopes, two nitrogen tank assemblies, two pump modules, an ammonia tank assembly and a spare latching end effector for the station's robotic arm. Atlantis is targeted to launch Nov. 12. Photo credit: NASA/Jack Pfaller

ISS014-E-09782 (14 Dec. 2006) --- European Space Agency (ESA) astronaut Christer Fuglesang, STS-116 mission specialist, waves to the camera as he participates in the mission's second of three planned sessions of extravehicular activity (EVA) as construction resumes on the International Space Station. Astronaut Robert L. Curbeam, Jr. (out of frame), mission specialist, also participated in the spacewalk. The station's Canadarm2 end effector is at left.