
STS057-93-052 (24 June 1993) --- The European Retrievable Carrier (EURECA) is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The photo was taken after EURECA's "capture" from Earth-orbit but prior to its berthing in the Shuttle's cargo bay. The southern two-thirds of the state of Florida, part of the Gulf of Mexico and clouds over the Atlantic form the backdrop for the 70mm image.

STS061-48-001 (9 Dec 1993) --- Orbiting Earth at an altitude of 356 nautical miles perched atop a foot restraint on the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronauts F. Story Musgrave (top) and Jeffrey A. Hoffman wrap up the final of five Extravehicular Activities (EVA). The west coast of Australia forms the backdrop for the 35mm frame.
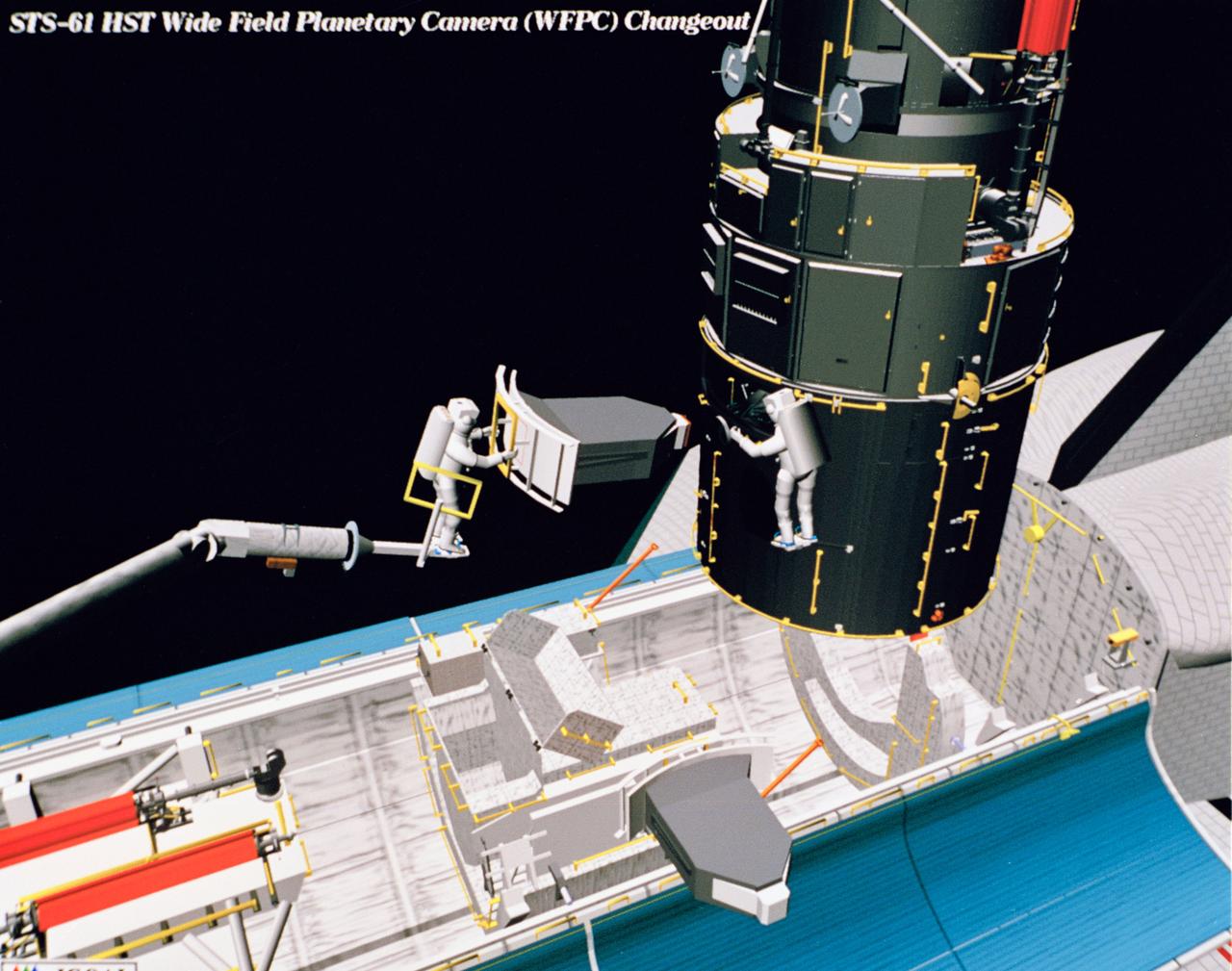
Computer generated scenes depicting the Hubble Space Telescope capture and a sequence of planned events on the planned extravehicular activity (EVA). Scenes include the Remote Manipulator System (RMS) arm assisting two astronauts changing out the Wide Field/Planetary Camera (WF/PC) (48699); RMS arm assisting in the temporary mating of the orbiting telescope to the flight support system in Endeavour's cargo bay (48700); Endeavour's RMS arm assisting in the "capture" of the orbiting telescope (48701); Two astronauts changing out the telescope's coprocessor (48702); RMS arm assistign two astronauts replacing one of the telescope's electronic control units (48703); RMS assisting two astronauts replacing the fuse plugs on the telescope's Power Distribution Unit (PDU) (48704); The telescope's High Resolution Spectrograph (HRS) kit is depicted in this scene (48705); Two astronauts during the removal of the high speed photometer and the installation of the COSTAR instrument (48706); Two astronauts, standing on the RMS, during installation of one of the Magnetic Sensing System (MSS) (48707); High angle view of the orbiting Space Shuttle Endeavour with its cargo bay doors open, revealing the bay's pre-capture configuration. Seen are, from the left, the Solar Array Carrier, the ORU Carrier and the flight support system (48708); Two astronauts performing the replacement of HST's Rate Sensor Units (RSU) (48709); The RMS arm assisting two astronauts with the replacement of the telescope's solar array panels (48710); Two astronauts replacing the telescope's Solar Array Drive Electronics (SADE) (48711).
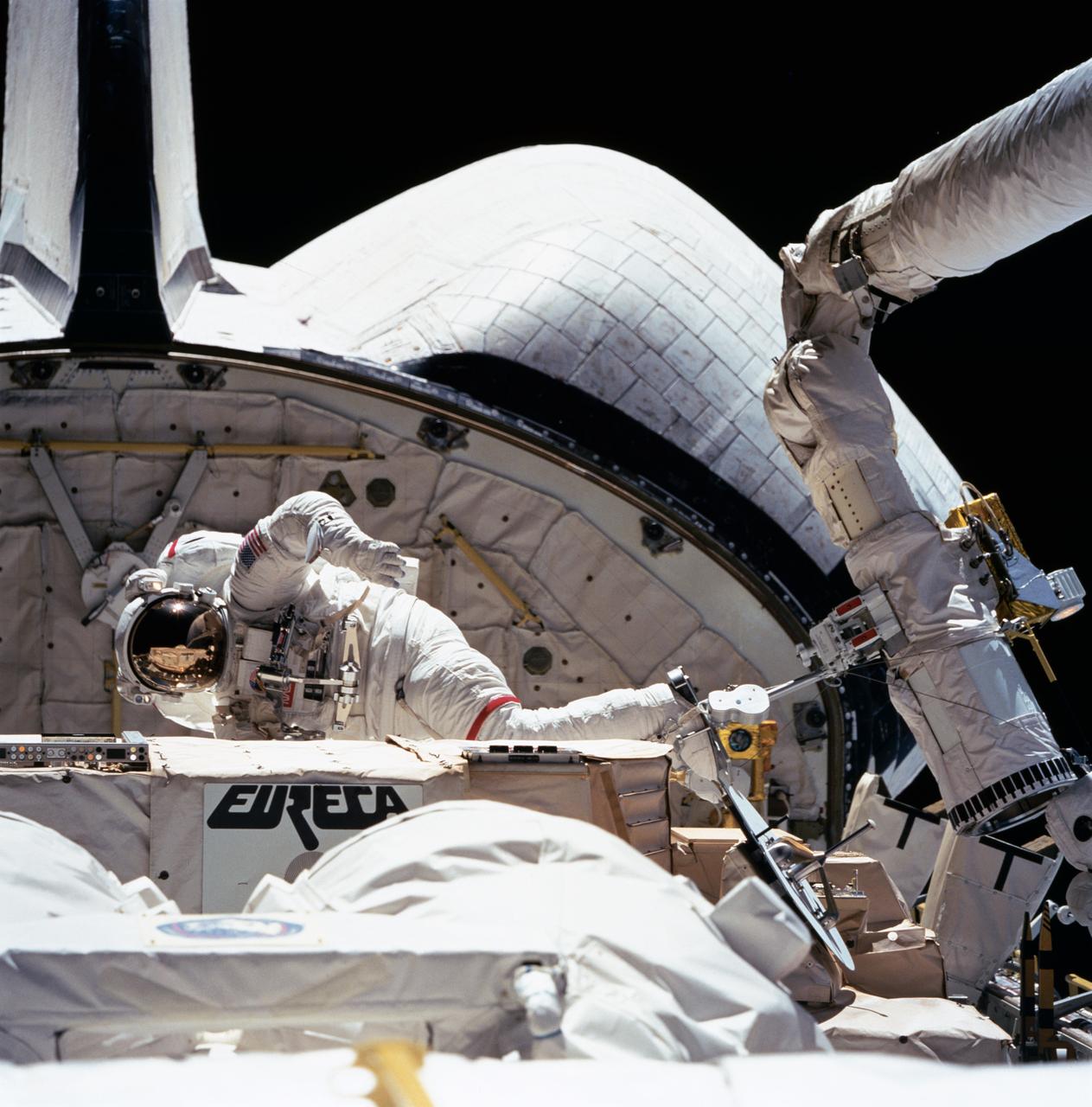
The darkness of space forms the backdrop for this extravehicular activity (EVA) scene captured by one of the STS-57 crewmembers in Endeavour's, Orbiter Vehicle (OV) 105's, crew cabin. Pictured near the recently "captured" European Retrievable Carrier (EURECA) at frame center is Mission Specialist (MS) and Payload Commander (PLC) G. David Low. Suited in an extravehicular mobility unit (EMU), Low, anchored to the remote manipulator system (RMS) via a portable foot restraint (PFR) (manipulator foot restraint (MFR)), is conducting Detailed Test Objective (DTO) 1210 procedures. Specifically, this activity will assist in refining several procedures being developed to service the Hubble Space Telescope (HST) on mission STS-61 in December 1993. The PFR is attached to the RMS end effector via a PFR attachment device (PAD). Partially visible in the foreground is the Superfluid Helium Onorbit Transfer (SHOOT) payload.

STS057-32-008 (25 June 1993) --- Astronaut G. David Low (nearer camera), his feet anchored to Endeavour's Remote Manipulator System (RMS), lifts fellow astronaut Peter J. K. (Jeff) Wisoff during a special phase of the lengthy June 25, 1993, extravehicular activity (EVA). This phase of the EVA dealt with the simulation of handling large components in space. This particular task was rehearsed with eyes toward the servicing of the Hubble Space Telescope (HST) in the near future or the assembly and maintenance of the International Space Station later. The two mission specialists and four other NASA astronauts spent almost ten days aboard the Space Shuttle Endeavour in Earth-orbit supporting the SPACEHAB mission, retrieving the European Retrievable Carrier (EURECA) and conducting various experiments.

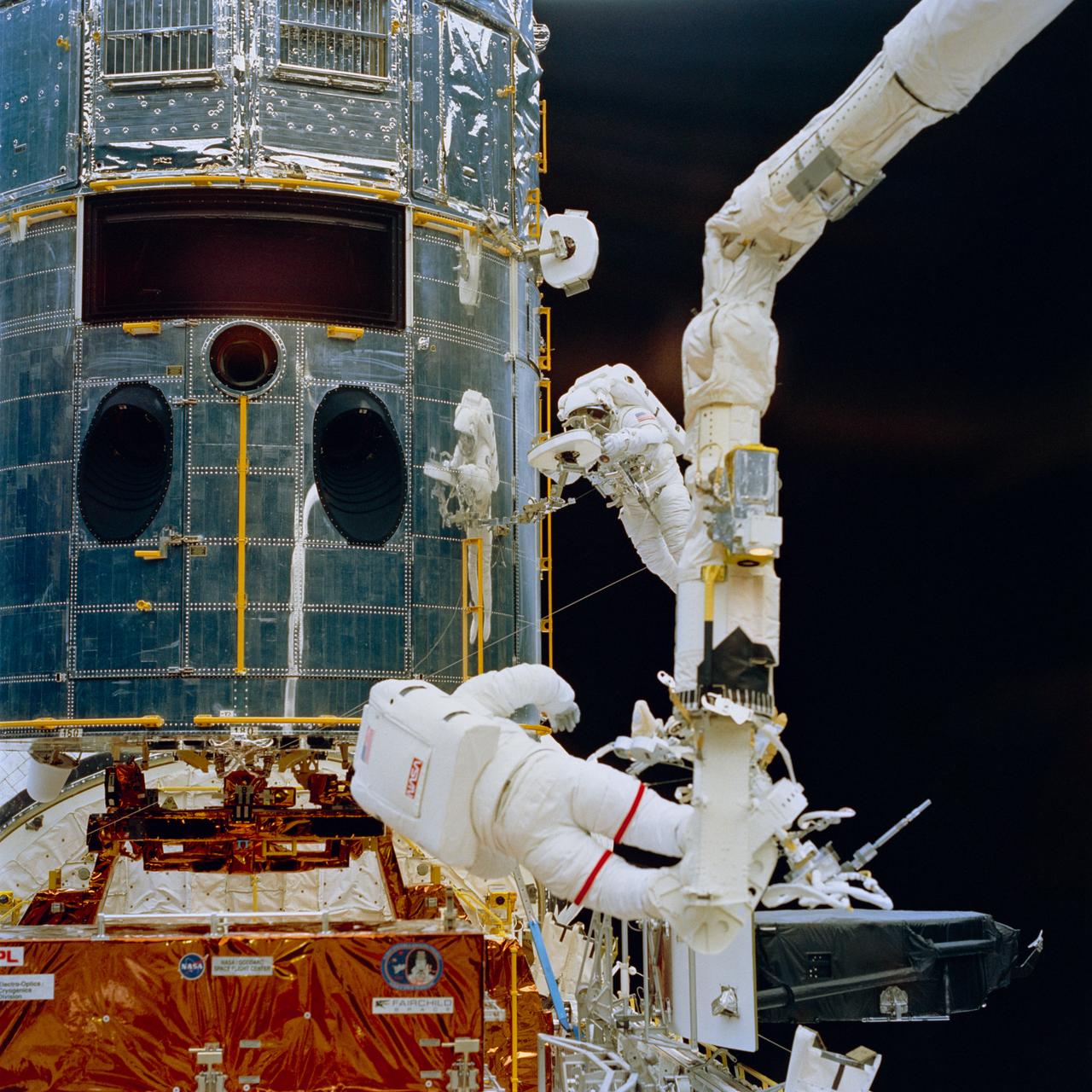
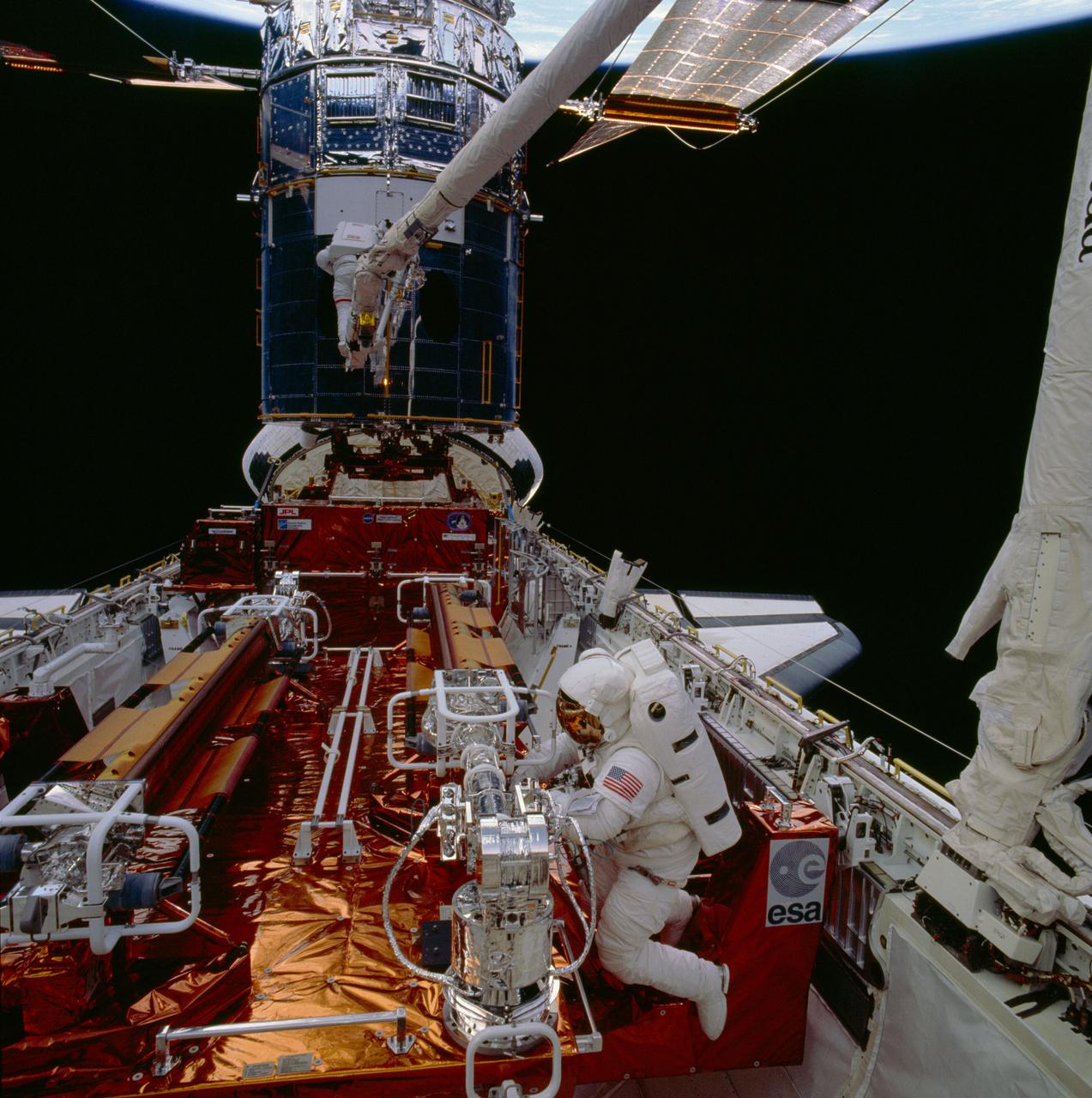
Extra vehicular activity - Astronaut Kathy Thornton on the end of orbiter Endeavour's remote manipulator system arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST).

STS072-321-002 (11-20 Jan. 1996) --- Astronaut Koichi Wakata operates the Remote Manipulator System (RMS) on the aft flight deck of the Earth-orbiting Space Shuttle Endeavour. Representing Japan’s National Space Development Agency (NASDA), Wakata joined five other astronauts for a week and a half of activity aboard Endeavour.

S123-E-008343 (21 March 2008) --- This scene, photographed from the International Space Station while docked with Space Shuttle Endeavour (STS-123), shows the orbiter, the shuttle's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS); Dextre, also known as the Special Purpose Dextrous Manipulator (SPDM); and a Soyuz vehicle docked with the orbital outpost.

S126-E-007864 (15 Nov. 2008) --- Space Shuttle Endeavour's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) is featured in this image photographed by an STS-126 crewmember aboard the shuttle. Earth's horizon and the blackness of space provide the backdrop for the scene.

STS061-23-037 (2-13 Dec 1993) --- ESA astronaut Claude Nicollier, mission specialist, is stationed on the Space Shuttle Endeavour's flight deck during one of the five Hubble Space Telescope (HST) servicing space walks. The controls for the Remote Manipulator System (RMS), which played an important role in the space walks, are left of frame center. Two space walkers can be seen through the aft windows.

STS061-105-024 (2-13 Dec. 1993) --- One of Endeavour's space walkers captured this view of Endeavour backdropped against the blackness of space, with the Sun displaying a rayed effect. The extended Remote Manipulator System (RMS) arm that the astronaut was standing on is seen on the left side of the view.

STS061-07-003 (4 Dec 1993) --- Swiss astronaut Claude Nicollier is pictured at the aft flight deck station he occupied during much of the time on NASA's STS-61 mission aboard the Space Shuttle Endeavour. Among Nicollier's responsibilities were the control of the Remote Manipulator System (RMS) during operations with the Hubble Space Telescope (HST).
Repair of the Hubble Space Telescope (HST) - orbiting earth at an altitude of 325 nautical miles. Perched atop a foot restraint on shuttle Endeavour's remote manipulator system arm, astronauts Story Musgrave and Jeffrey Hoffman wrap up the final of five space walks.

Anchored on the end of orbiter Endeavour's remote manipulator system arm, astronaut Jeffrey Hoffman (foreground) prepares to install the new wide field planetary camera into the empty cavity of the Hubble Space Telescope (HST). Astronaut Story Musgrave works with a portable foot restraint.

STS088-335-006 (4-15 Dec. 1998) --- Astronaut Nancy J. Currie, mission specialist, looking out the aft flight window, works the controls of the Remote Manipulator System (RMS) arm onboard the Earth-orbiting Space Shuttle Endeavour. She was in the process of moving the stowed United States-built Unity Module (Node 1) into a docked configuration with Endeavour?s docking system. This process preceded rendezvous and docking with the Russian-built FGB Module (Zarya).

S123-E-008217 (21 March 2008) --- Space Shuttle Endeavour's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) and a portion of the International Space Station's (ISS) solar array panels are photographed by a STS-123 crewmember through a window on Endeavour while docked with the station. The blackness of space and Earth's horizon provide the backdrop for the scene.
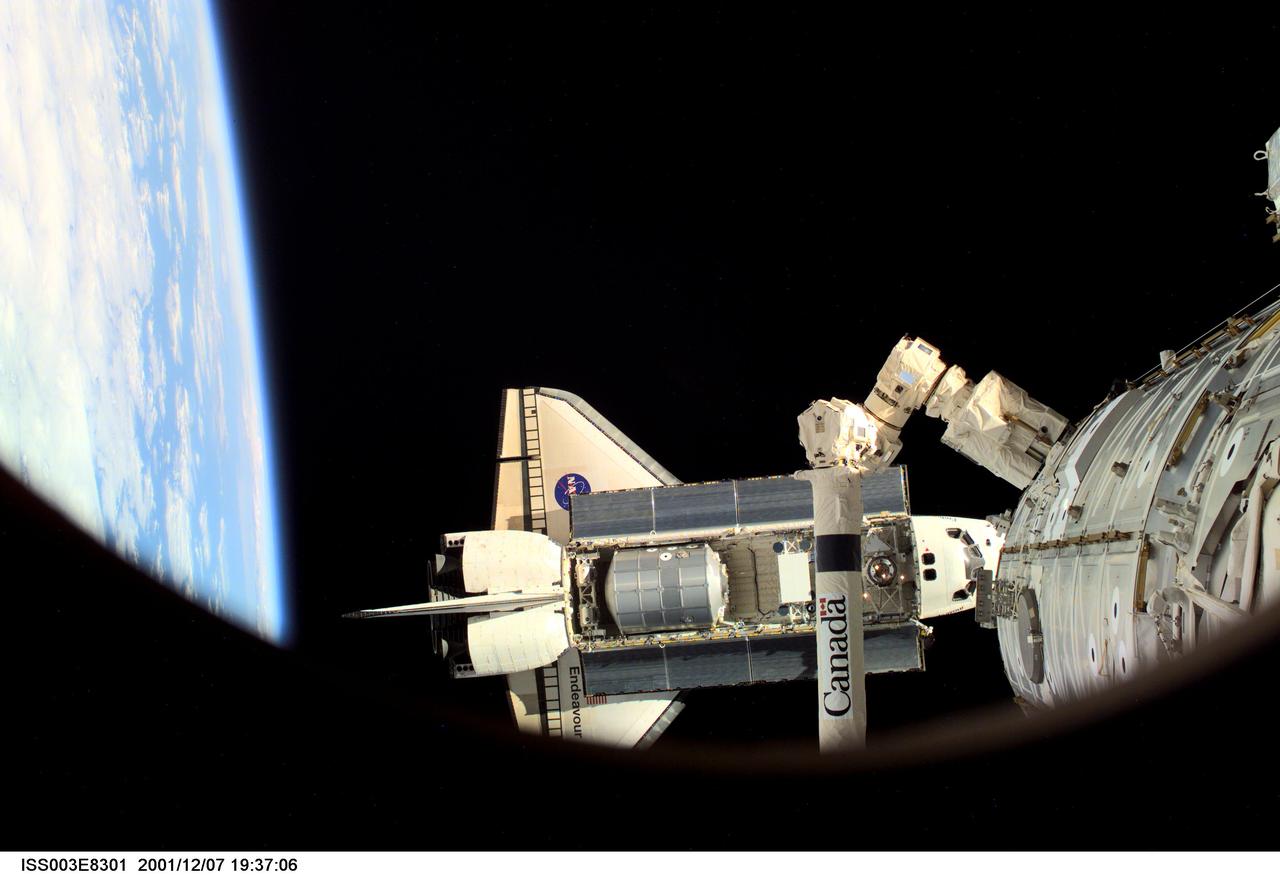
ISS003-E-8301 (7 December 2001) --- The Space Shuttle Endeavour, controlled by the flight crew of STS-108, is backdropped against the blackness of space over Earth's horizon as it approaches the International Space Station (ISS). The Raffaello logistics module that is being brought up to the orbiting outpost is clearly visible in Endeavour's cargo bay. The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is visible at lower right. Among other activities the Endeavour's mission will include the change out of the station crews. The image was recorded with a digital still camera.
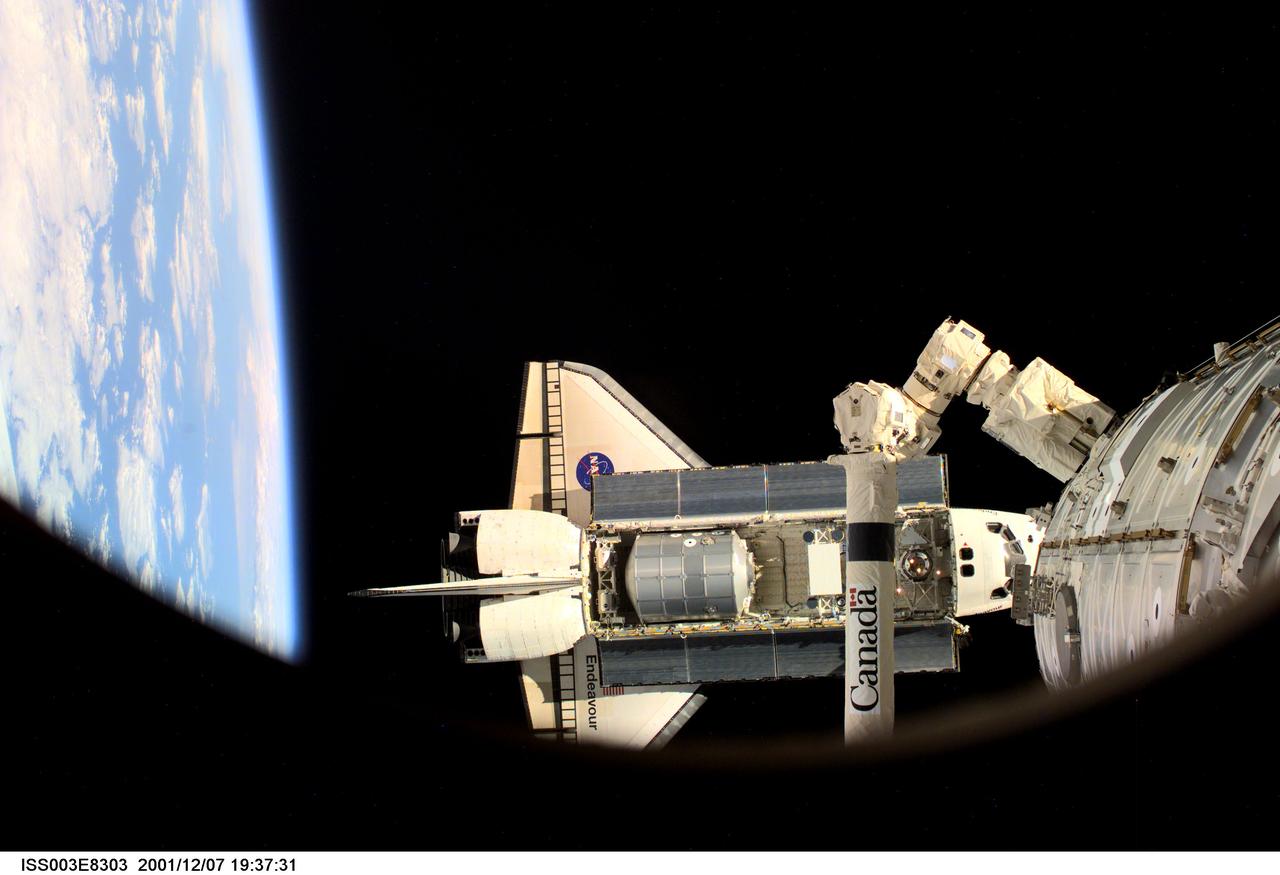
ISS003-E-8303 (7 December 2001) --- The Space Shuttle Endeavour, controlled by the flight crew of STS-108, is backdropped against the blackness of space over Earth's horizon as it approaches the International Space Station (ISS). The Raffaello logistics module that is being brought up to the orbiting outpost is clearly visible in Endeavour's cargo bay. The Space Station Remote Manipulator System (SSRMS) or Canadarm2 is visible at lower right. Among other activities the Endeavour's mission will include the change out of the station crews. The image was recorded with a digital still camera.
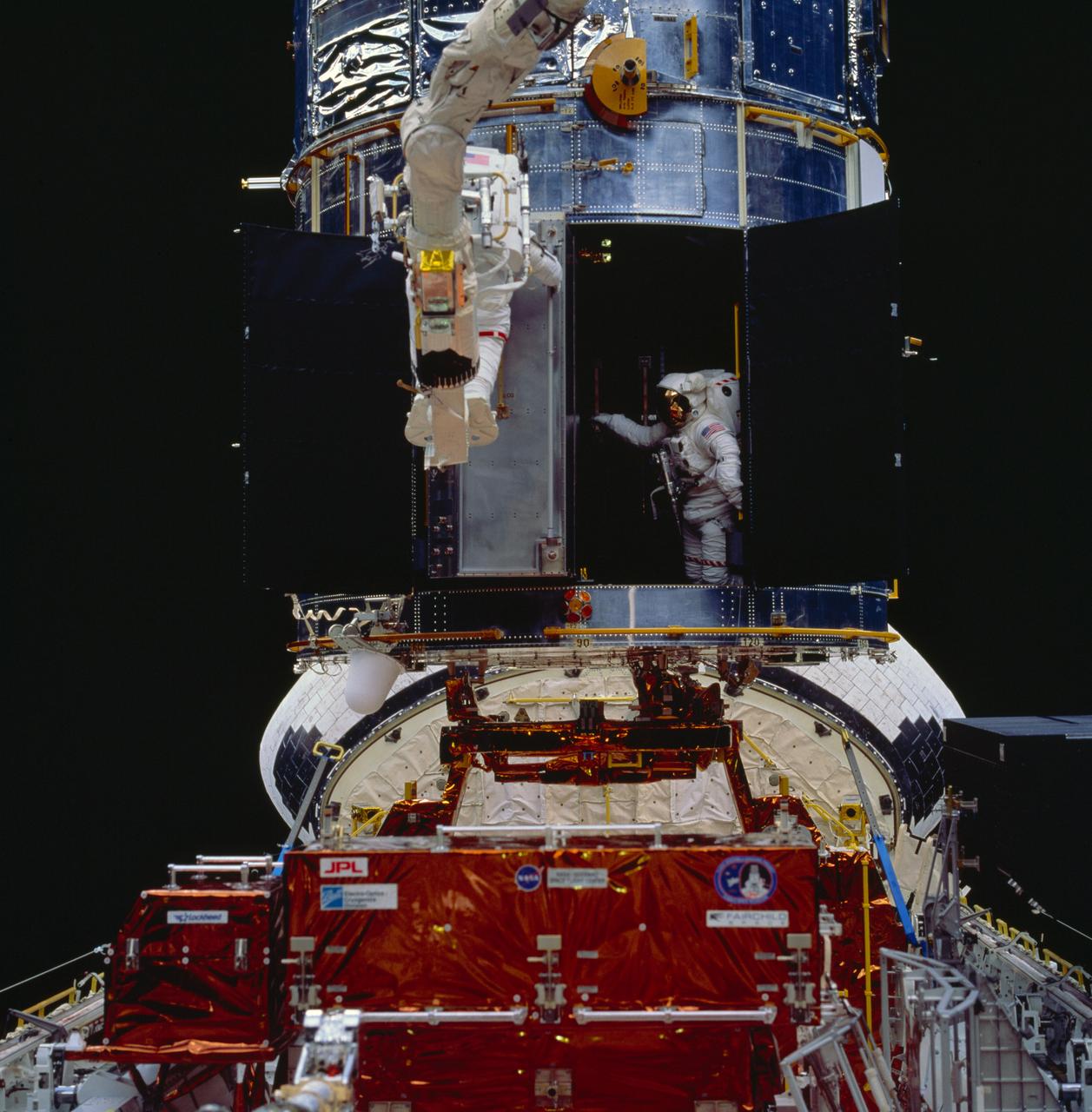
STS061-94-050 (8 Dec 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR, during their extravehicular activity (EVA).
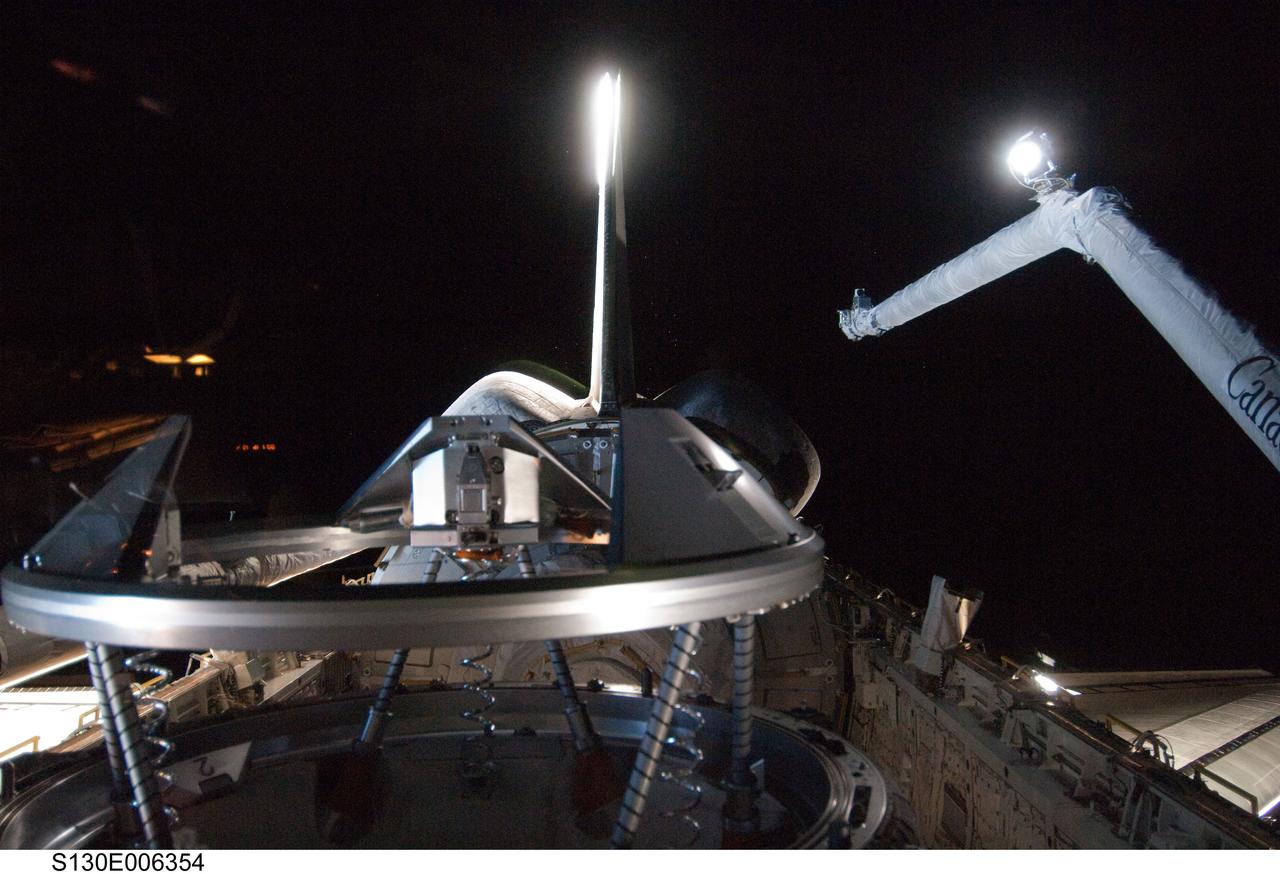
S130-E-006354 (9 Feb. 2010) --- Backdropped by the blackness of space, space shuttle Endeavour’s payload bay, docking mechanism (foreground), vertical stabilizer, orbital maneuvering system (OMS) pods, and Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) are featured in this image photographed by an STS-130 crew member from an aft flight deck window.
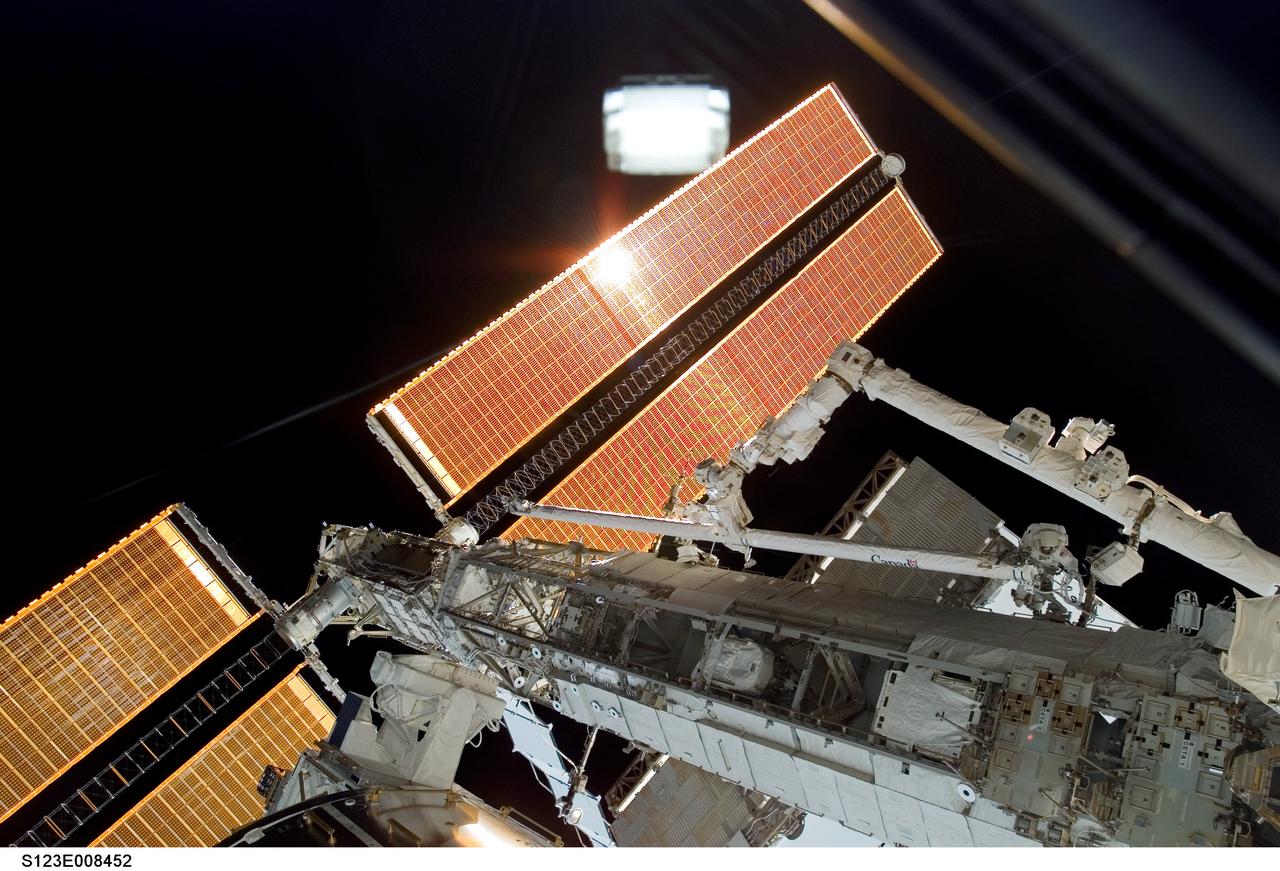
S123-E-008452 (23 March 2008) --- The Canadarm2, or Space Station Remote Manipulation System (SSRMS) robot arm, completes the handoff of the Orbiter Boom Sensor System for stowage on the International Space Station's S1 truss. There is no room on the next shuttle flight to launch with the sensor system onboard, so for the first time, it is being stowed on the orbital outpost prior to the undocking of the ISS and Space Shuttle Endeavour.
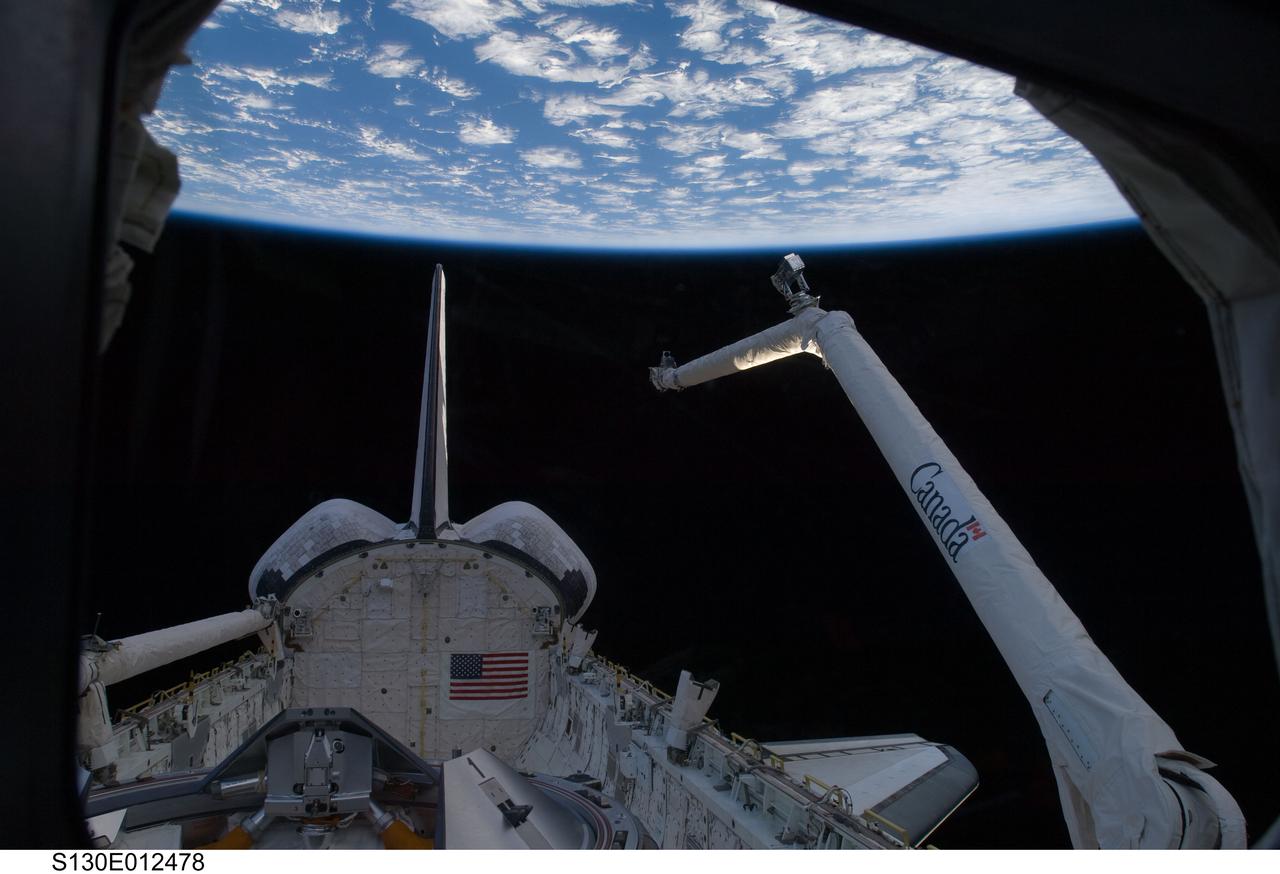
S130-E-012478 (20 Feb. 2010) --- Backdropped by Earth?s horizon and the blackness of space, a partial view of space shuttle Endeavour's payload bay, vertical stabilizer, orbital maneuvering system (OMS) pods, Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) and docking mechanism are featured in this image photographed by an STS-130 crew member from an aft flight deck window.

STS057-89-067 (25 June 1993) --- Backdropped against the blackness of space, astronaut Peter J. K. (Jeff) Wisoff, stands on a mobile foot restraint on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS). Astronauts Wisoff and G. David Low participated in a lengthy session of extravehicular activity (EVA) on the mission's fifth day in Earth-orbit. This view was recorded on 70mm film with a handheld Hasselblad camera inside the Space Shuttle Endeavour's crew cabin.

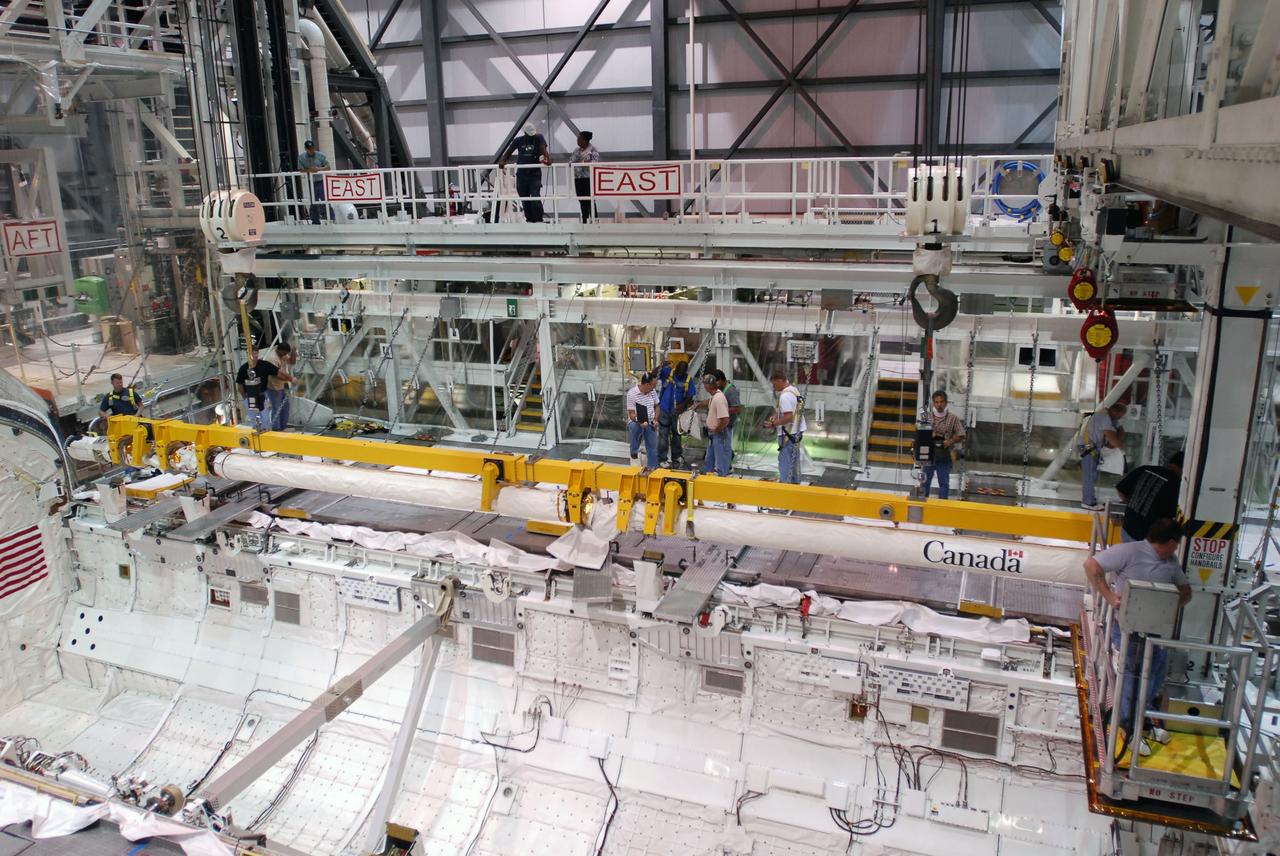
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

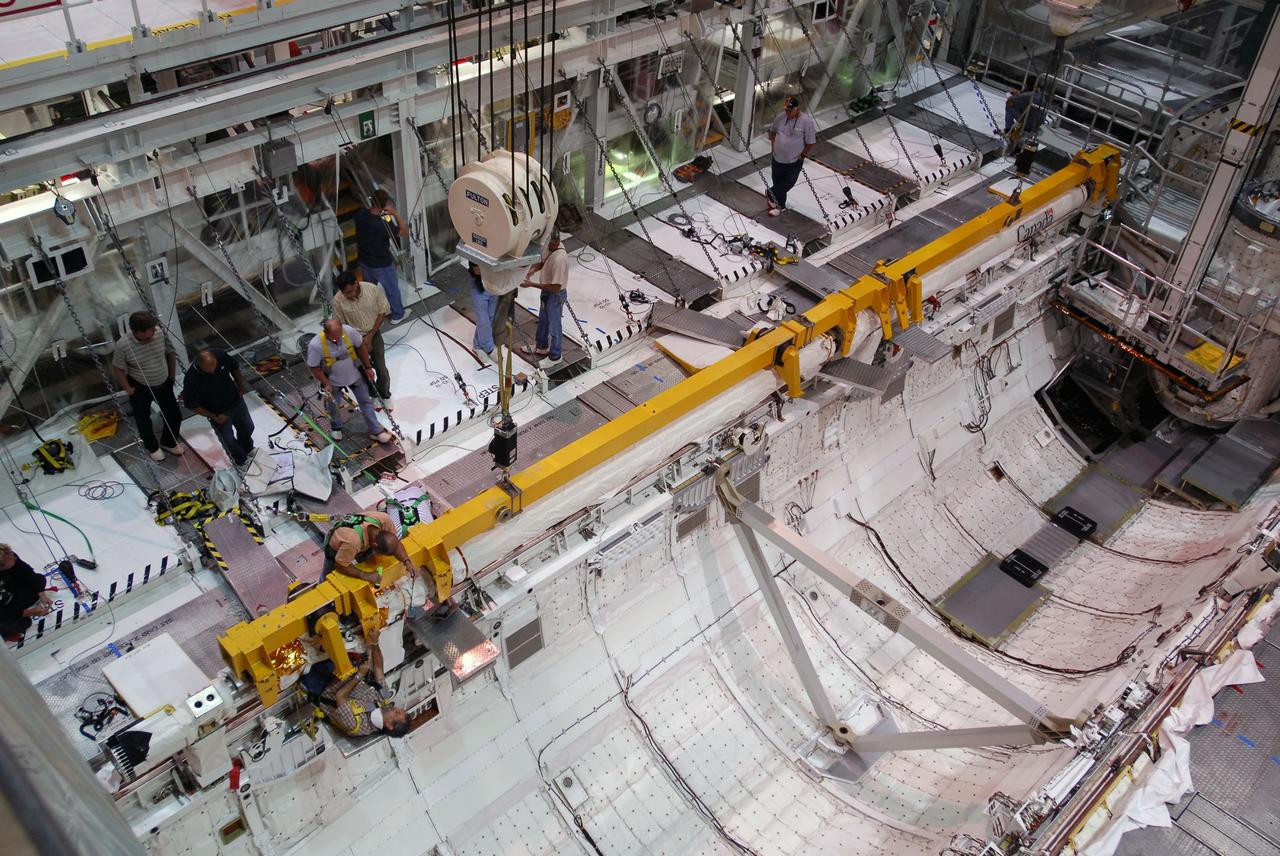
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted toward a transportation canister following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers secure the remote manipulator system, or RMS, in a transportation canister following its removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane lifts the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is suspended from the ceiling following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane is attached to the remote manipulator system, or RMS, in space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, tethered workers prepare to remove the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

S118-E-05512 (9 Aug. 2007) --- Backdropped by the blackness of space and Earth's horizon, the SPACEHAB pressurized logistics module in Space Shuttle Endeavour's payload bay, vertical stabilizer and the shuttle's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) are featured in this image photographed by an STS-118 crewmember during flight day two activities.

S123-E-005073 (11 Mar. 2008) --- This view out the aft windows on Endeavour's flight deck was one of a series of images recorded by the STS-123 crewmembers during their first full day in space. The end of the Canadian-built remote manipulator system's robot arm (right edge) along with the shuttle's vertical stabilizer and its two orbital maneuvering system (OMS) pods are visible. A heavily cloud-covered area of Earth fills the top half of the frame.

S118-E-05513 (9 Aug. 2007) --- Backdropped by the blackness of space and Earth's horizon, the SPACEHAB pressurized logistics module in Space Shuttle Endeavour's payload bay, vertical stabilizer and the shuttle's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) are featured in this image photographed by an STS-118 crewmember during flight day two activities.

S127-E-006238 (16 July 2009) --- Backdropped by the blackness of space, the Japanese Experiment Module's Exposed Facility and the Experiment Logistics Module-Exposed Section, visible in Space Shuttle Endeavour?s payload bay, vertical stabilizer (intersecting Earth?s horizon) and orbital maneuvering system (OMS) pods, the shuttle?s remote manipulator system (RMS) and docking mechanism are featured in this image photographed by a STS-127 crew member from an aft flight deck window.

STS097-715-090 (30 Nov.-11 Dec. 2000) --- The horizon of a blue and white Earth and the blackness of space form the backdrop for this view of the cargo bay of the Space Shuttle Endeavour, as seen through windows on the aft flight deck during the STS-97 mission. Pictured in the cargo bay is the Orbital Docking System (ODS) in the foreground. In its stowed position at right center of the frame is the Canadian-built Remote Manipulator System (RMS) arm.

S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS061-86-030 (4 Dec 1993) --- The Hubble Space Telescope (HST) is pictured in the Space Shuttle Endeavour's cargo bay following its capture and berthing early in the eleven-day STS-61 mission. The Remote Manipulator System (RMS) arm, with television cameras mounted on it, was maneuvered from inside the cabin in order to survey HST. Five days of space walks followed, during which a variety of servicing tasks were performed by four crew members.

STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.

STS061-95-031 (6 Dec 1993) --- The damaged solar array panel removed from the Hubble Space Telescope (HST) is backdropped over northern Sudan. Astronaut Kathryn C. Thornton, just out of frame at top right, watched the panel after releasing it moments earlier.

STS061-77-094 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored to the end of the Remote Manipulator System (RMS) arm, prepares to stow the Wide Field\Planetary Camera (WF\PC I) for the Hubble Space Telescope (HST), during their extravehicular activity (EVA). Astronaut F. Story Musgrave, stationed at the stowage area at bottom of frame, assists. WF/PC II is in place on the HST.

S77-E-5053 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The Spacehab module can be seen in the foreground. The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.
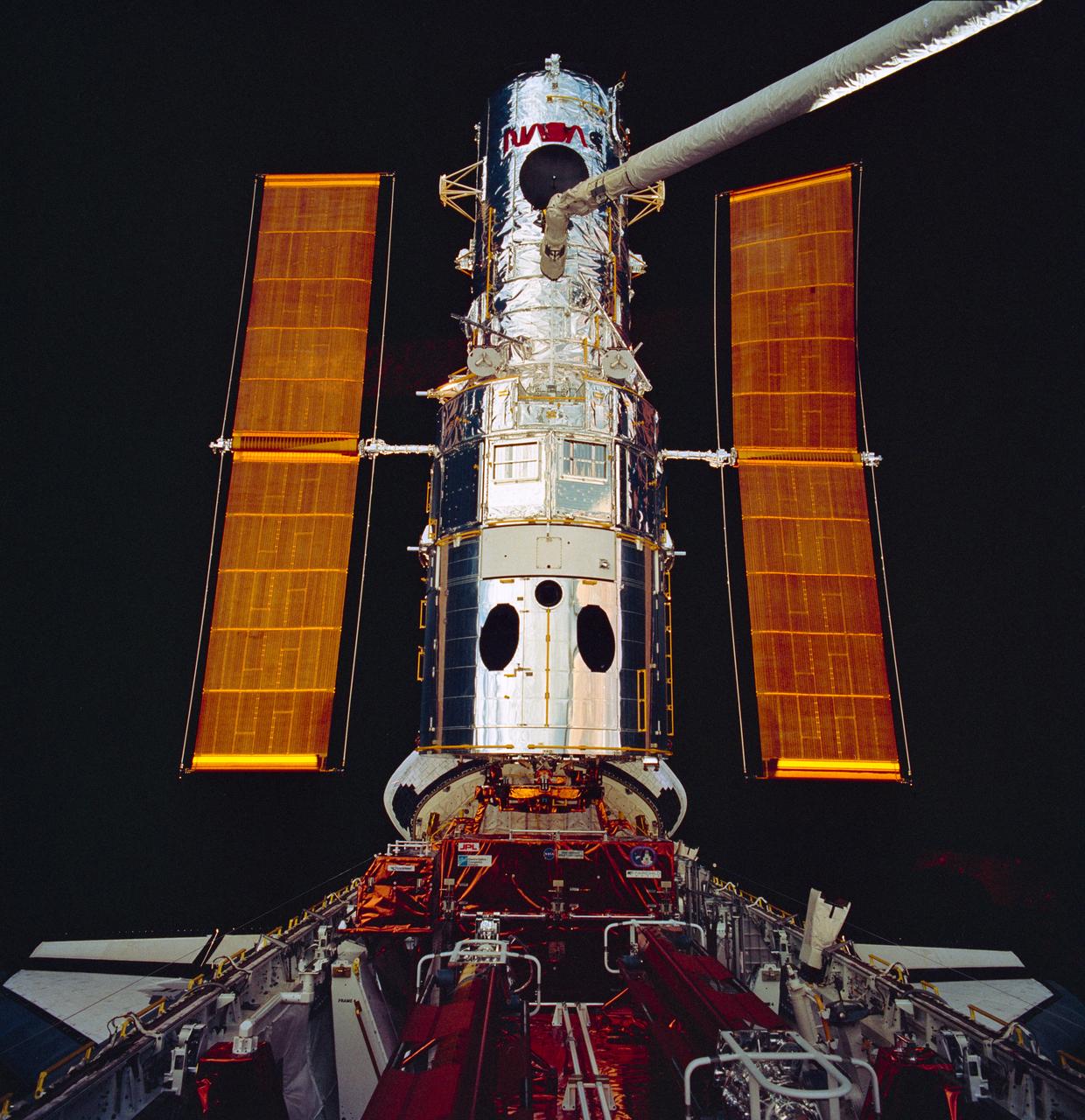
STS061-79-072 (4 Dec 1993) --- The Hubble Space Telescope (HST) is backdropped against the blackness of space in this 70mm frame recorded during a video survey of the spacecraft following the telescope's recent berthing in the Space Shuttle Endeavour's cargo bay. European Space Agency (ESA) scientist Claude Nicollier controlled the Remote Manipulator System (RMS) arm slowly so that mounted TV cameras could show flight controllers the various areas on the telescope.
STS061-74-046 (7 Dec 1993) --- Anchored on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman (foreground) prepares to install the new Wide Field\Planetary Camera (WFPC II) into the empty cavity (top left) on the Hubble Space Telescope (HST). WFPC I is seen temporarily stowed at bottom right. Astronaut F. Story Musgrave works with a Portable Foot Restraint (PFR) at frame center, as his image is reflected in the shiny surface of the telescope. Hoffman and Musgrave shared chores on three of the five extravehicular activity?s (EVA) during the mission.

STS061-79-087 (4 Dec. 1993) --- The Hubble Space Telescope (HST), backdropped over Madagascar, is berthed in the space shuttle Endeavour's cargo bay following its capture by the STS-61 astronauts. The crew used TV cameras to survey the spacecraft before sending out four astronauts on five separate sessions of extravehicular activity (EVA) to perform a variety of servicing tasks. Photo credit: NASA

S77-E-5052 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS061-48-027 (9 Dec 1993) --- Astronaut F. Story Musgrave moves about in the Space Shuttle Endeavour's cargo bay during the deployment of the solar array panels on the Hubble Space Telescope (HST) during the final of five STS-61 space walks. The left hand of astronaut Jeffrey A. Hoffman appears at lower left corner.

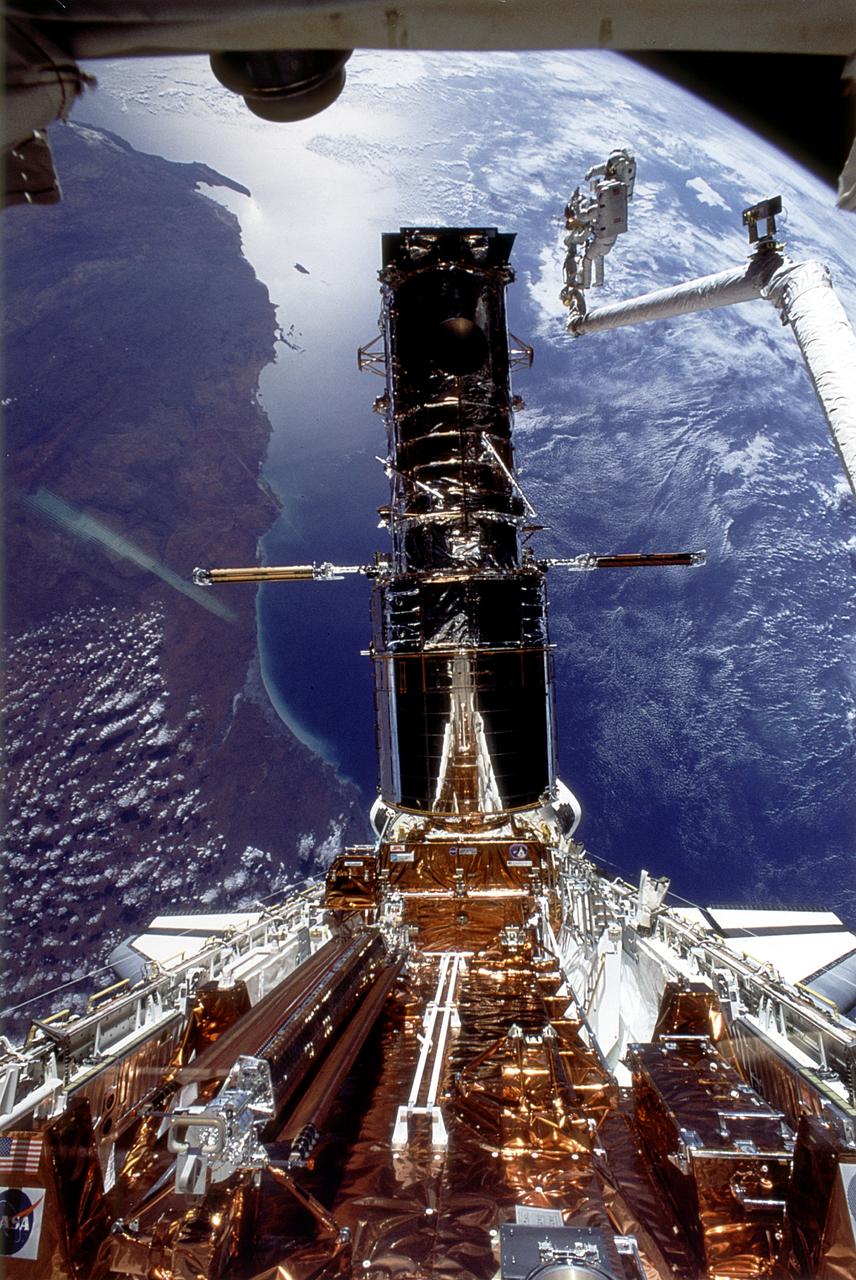
STS061-53-026 (4 Dec 1993) --- One of the Space Shuttle Endeavour's aft flight deck windows frames this view of the Hubble Space Telescope (HST) as it approaches the Endeavour. Backdropped against western Australia, the Remote Manipulator System (RMS) arm awaits the arrival of the telescope. Once berthed in Endeavour's cargo bay, HST underwent five days of servicing provided by four space walking crew members. Shark Bay (upper left) and Perth (lower left) are visible in the frame.

STS061-77-078 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored on the end of the Remote Manipulator System (RMS) arm, is pictured with the Wide Field/Planetary Camera (WF/PC I) during the third of five extravehicular activity?s (EVA). Astronauts Hoffman and F. Story Musgrave, seen near the stowage area for the WF/PC, had earlier installed the new camera (note white rectangle) on lower portion of telescope.

STS088-719-071 (6 Dec. 1998) --- Just a few feet away from a 70mm camera onboard the Space Shuttle Endeavour, the Russian-built control module and the U.S.-built Unity connecting module are mated in the shuttle's cargo bay. Using Endeavour's 50-ft. long Canadian-built Remote Manipulator System (RMS) robot arm, astronaut Nancy J. Currie working from the aft flight deck, plucked Zarya out of orbit at 5:47 p.m. (CST), December 6. The craft had been orbiting Earth for a little over 16 days prior to grapple and subsequent docking to Unity.
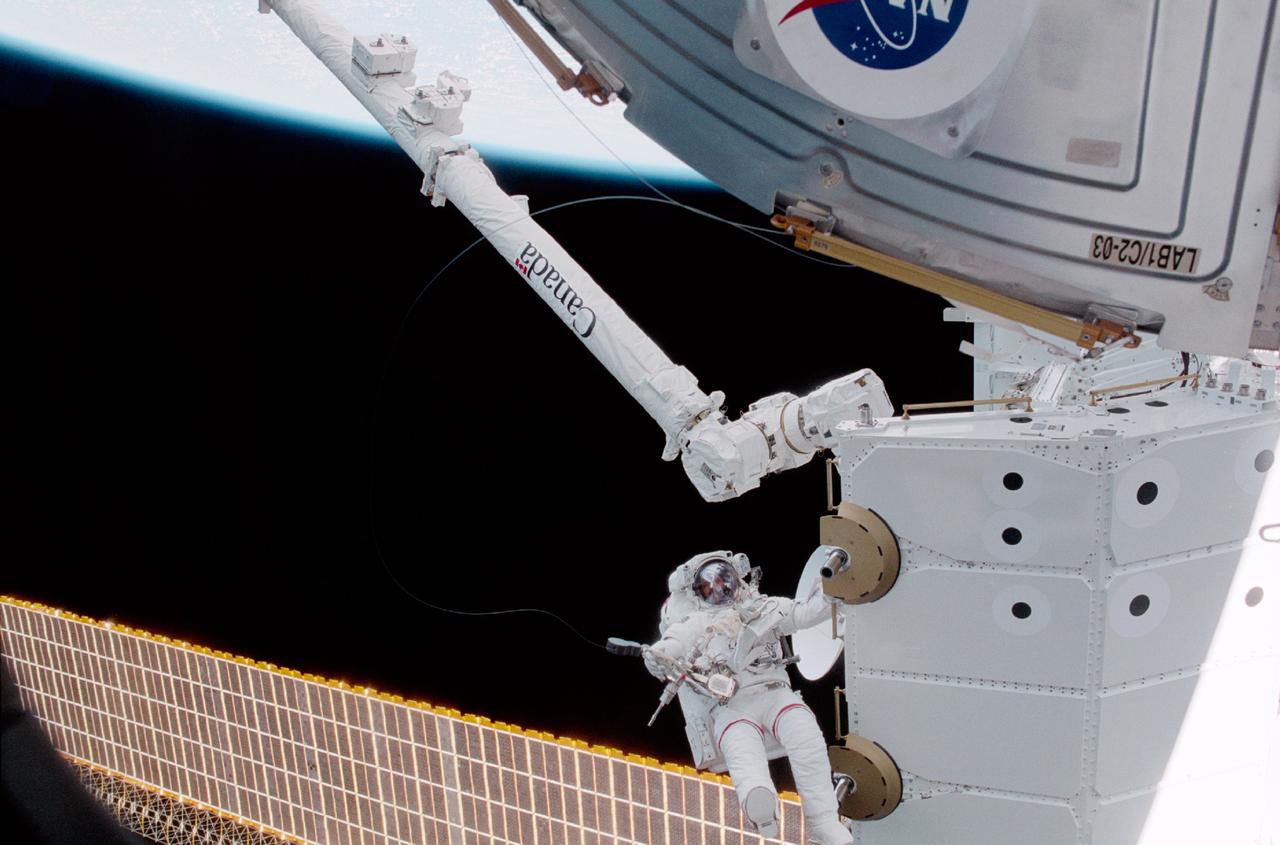
The main objective of the STS-100 mission, the sixth International Space Station (ISS) assembly flight, was the delivery and installation of the Canadian-built Space Station Remote Manipulator System (SSRMS), or Canadarm2. In this photograph, astronaut Chris A. Hadfield, mission specialist representing the Canadian Space Agency (CSA), is seen near the Canadarm2, as the new tool for the ISS grasps the space lab pallet. STS-100 launched April 19, 2001 aboard the Space Shuttle Orbiter Endeavour for an 11 day mission.

STS088-361-022 (4-15 Dec. 1998) --- Astronaut Nancy J. Currie, mission specialist, works at the controls of the Space Shuttle Endeavour?s Remote Manipulator System (RMS) to unberth the United States-built Unity module. The crew also used the RMS for docking and extravehicular activity (EVA) support during the mission. At mission?s end, the connected node and the Russian-built FGB module were released in Earth-orbit.
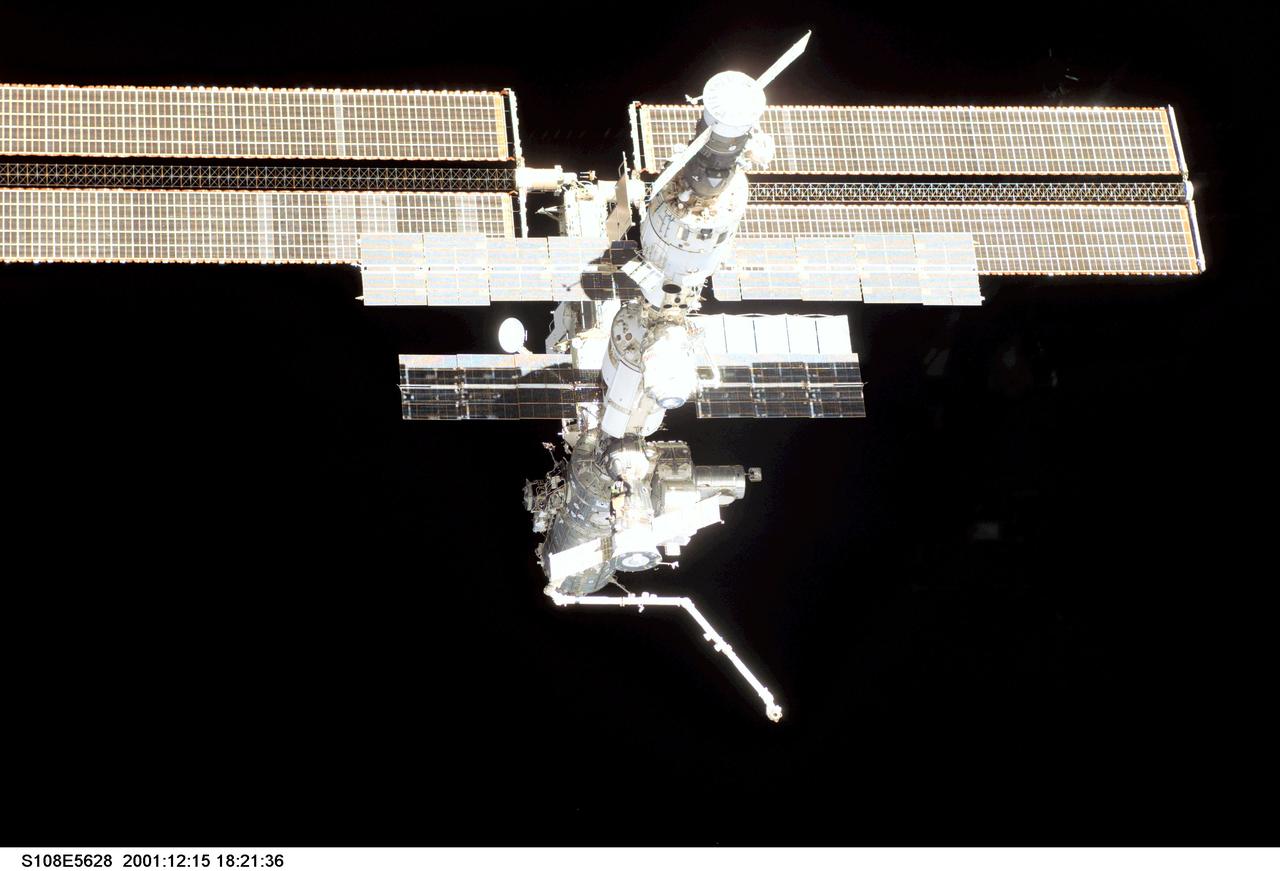
STS108-E-5628 (15 December 2001) --- As seen in an overall view from a digital still camera aimed through a window on Endeavour's aft flight deck, the International Space Station (ISS), now staffed with its fourth three-person crew, is backdropped against dark space. The scene was photographed during a farewell look from the shuttle following undocking. The Space Station Remote Manipulator System (SSRMS) or Canadarm2 protrudes from the orbital outpost at the bottom of the scene.

STS097-330-028 (30 Nov.-11 Dec. 2000) --- Astronaut Michael J. Bloomfield, STS-97 pilot, occupies himself with an operational task on the aft flight deck of the Earth-orbiting Space Shuttle Endeavour. During the second space walk, Bloomfield spent a majority of his mission assignment near this area, as he was in charge of the controls for the remote manipulator system (RMS), located on the nearby panel.

STS-88 Mission Specialist Nancy Jane Currie is assisted with her ascent and re-entry flight suit in the white room at Launch Pad 39A before entering Space Shuttle Endeavour for launch. During the nearly 12-day mission, the six-member crew will mate the first two elements of the International Space Station the already-orbiting Zarya control module with the Unity connecting module carried by Endeavour. She is making her third spaceflight as the crew's flight engineer and prime operator of the Remote Manipulator System, the robotic arm

STS-49, the first flight of the Space Shuttle Orbiter Endeavour, lifted off from launch pad 39B on May 7, 1992 at 6:40 pm CDT. The STS-49 mission was the first U.S. orbital flight to feature 4 extravehicular activities (EVAs), and the first flight to involve 3 crew members working simultaneously outside of the spacecraft. The primary objective was the capture and redeployment of the INTELSAT VI (F-3), a communication satellite for the International Telecommunication Satellite organization, which was stranded in an unusable orbit since its launch aboard the Titan rocket in March 1990. After securing the satellite with the Remote Manipulator System (RMS), the crew proceeded with preparing the satellite for its release into space.

S126-E-005051 (15 Nov. 2008) --- Not long after the opening of the payload bay doors on the Space Shuttle Endeavour, crewmembers were able to get their first looks at cargo and hardware located in the bay, from windows on the aft flight deck. Visible in the frame are the Canadian-built remote manipulator system's robot arm, the docking system which will have a major role in the following day's docking with the International Space Station, and the Italian-built Multi-Purpose Logistics Module Leonardo en route to its fifth visit to the orbital outpost.

STS088-335-015 (4-15 Dec. 1998) --- Astronauts Nancy J. Currie, mission specialist, and Robert D. Cabana, commander, are busy on the flight deck of the Earth-orbiting Space Shuttle Endeavour. Currie is working the controls of the Remote Manipulator System (RMS) arm, while Cabana observes. The crew used the RMS for docking and extravehicular activity (EVA) support during the mission. At mission?s end, the connected United States-built Unity Module (Node 1) and the Russian-built FGB Module (Zarya) were released in Earth-orbit.

KENNEDY SPACE CENTER, FLA. -- At Pad 39A, technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- At Pad 39A, technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- At Pad 39A, technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- At Launch Pad 39A, a crane lifts the replacement wrist joint for the Space Station Remote Manipulator System for installation into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Technicians prepare to install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Technicians unload the replacement wrist joint for the Space Station Remote Manipulator System before installing it in Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- At Pad 39A, technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

KENNEDY SPACE CENTER, FLA. -- At Pad 39A, technicians install the replacement wrist joint for the Space Station Remote Manipulator System into Space Shuttle Endeavour's payload bay. The new wrist joint, called an Orbital Replacement Unit (ORU), will be installed next to the arm's Latching End Effector during the final of three planned spacewalks. Mission STS-111 is designated UF-2, the 14th assembly flight to the International Space Station. Endeavour's payload includes the Multi-Purpose Logistics Module Leonardo and Mobile Base System. The mission also will swap resident crews on the Station, carrying the Expedition 5 crew and returning to Earth Expedition 4. Liftoff of Endeavour is scheduled between 4 and 8 p.m. May 30, 2002

STS061-98-0AR (8 Dec 1993) --- Earth is partially illuminated but the Hubble Space Telescope (HST) and the Space Shuttle Endeavour are still mostly in darkness, in this 70mm frame photographed during the fourth of five space walks. Astronaut Kathryn C. Thornton, barely visible above left center in the frame, works to install the Corrective Optics Space Telescope Axial Replacement (COSTAR).
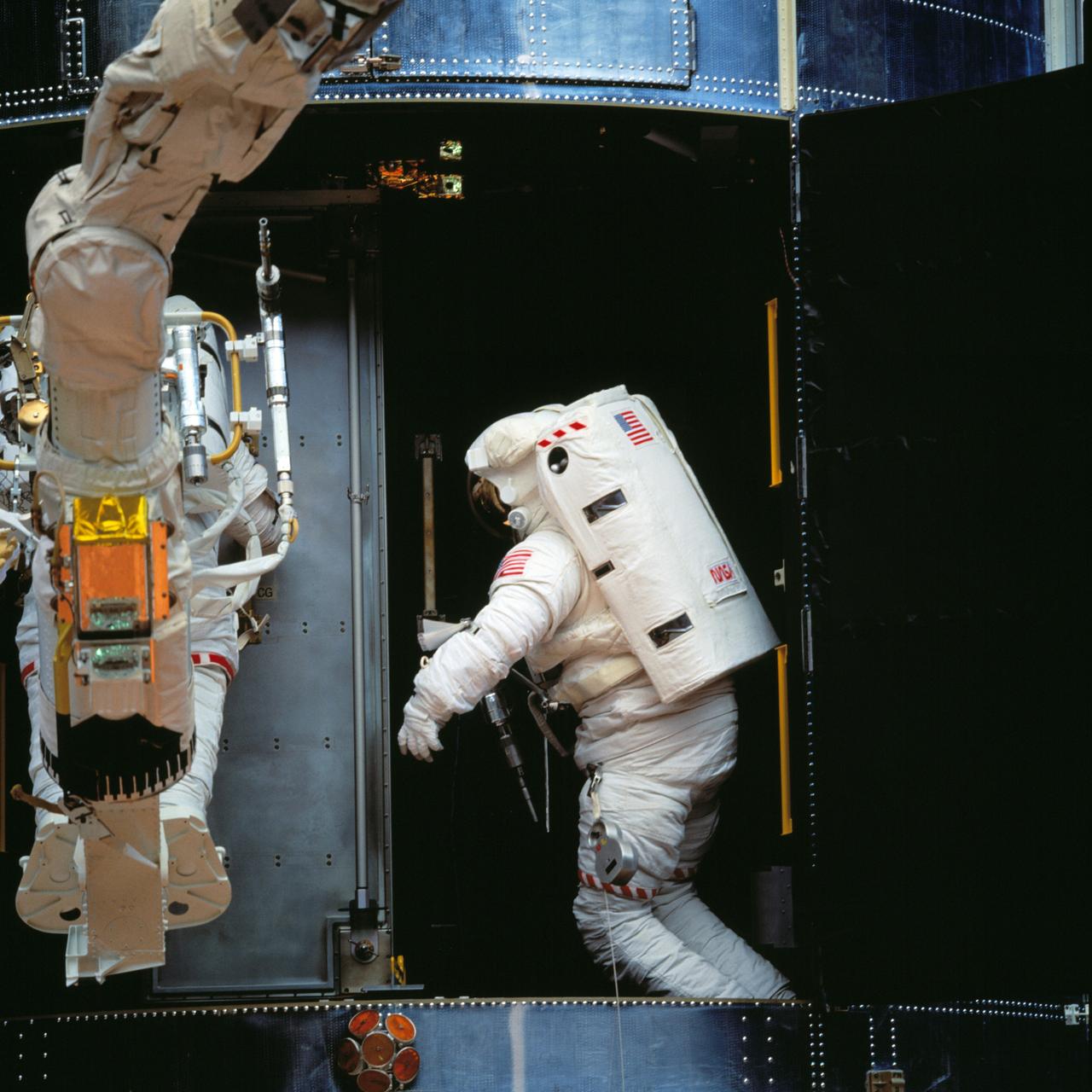
STS061-94-059 (8 Dec. 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR.

STS061-77-102 (7 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave are partially silhouetted against the Indian Ocean as they work to install the Magnetic Sensing System (MSS) on the Hubble Space Telescope (HST). Musgrave is anchored to the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The HST is positioned along the southern end of Madagascar, 325 nautical miles away. Visible on the western coast are the sediment laden Onilahy and Fiherenana Rivers which empty into Saint Augustin Bay. North of Fiherenana River is the Mangoky River. The circular feature on the southern end of Madagascar and to the right of HST is the L'ivakoany Mountains. The eastern coast is relatively straight compared to the western coast.
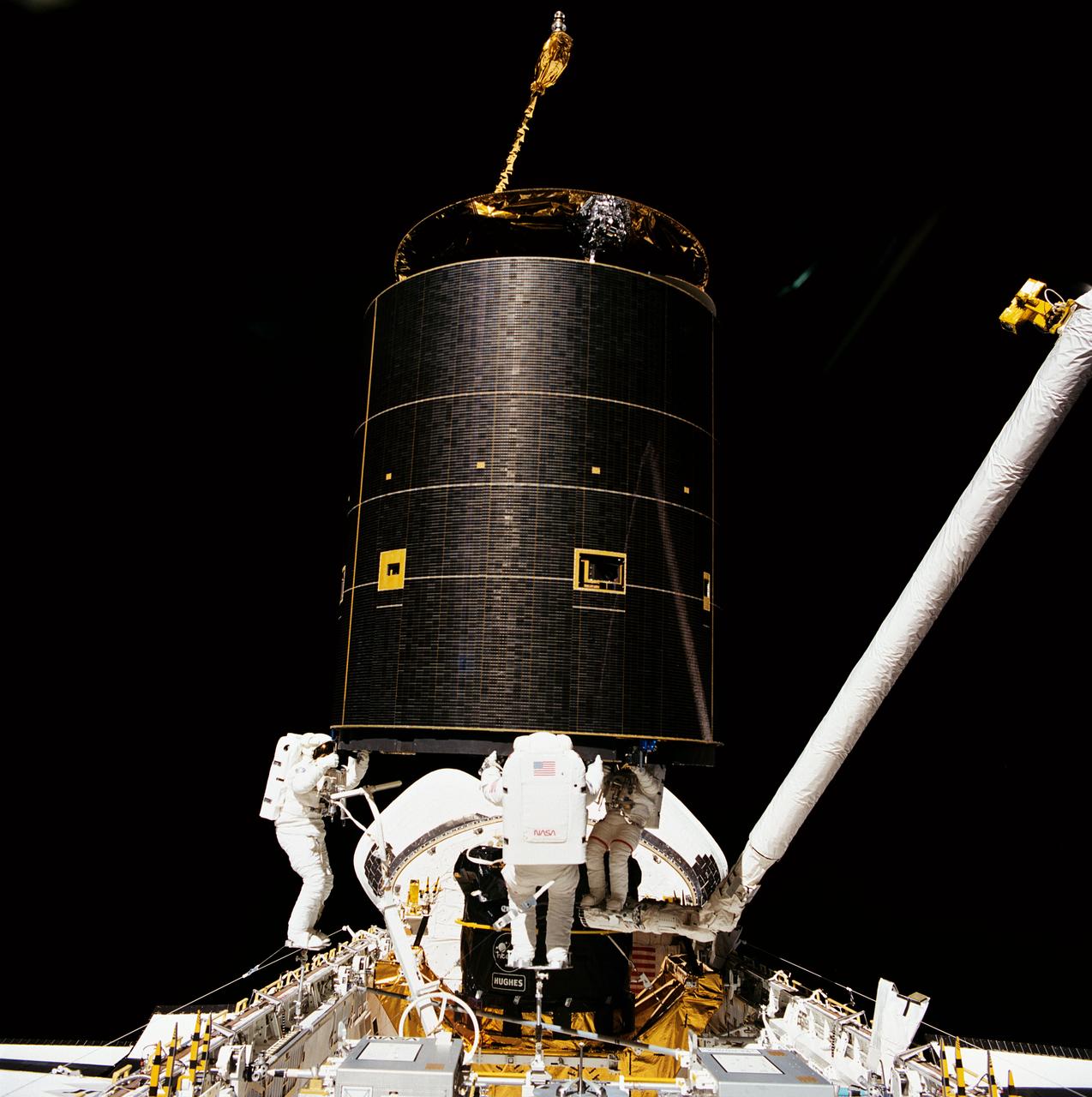
STS049-91-026 (13 May 1992) --- Three astronauts hold onto the 4.5-ton Intelsat VI satellite after a six-handed "capture" was made minutes earlier. Left to right are astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot. Thuot stands on the end of the remote manipulator system arm, from which he had made two earlier unsuccessful grapple attempts on two-person extravehicular activity sessions. Ground controllers and crew members agreed that a third attempt, using three mission specialists in the cargo bay of the space shuttle Endeavour, was the effort needed to accomplish the capture feat.

STS049-91-029 (13 May 1992) --- Following the successful capture of Intelsat VI satellite, three astronauts continue their chores toward moving the 4.5 ton communications satellite into the space shuttle Endeavour's cargo bay. A fellow crew member recorded this 70mm still frame from inside Endeavour's cabin. Left to right, astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot, cooperate on the effort to attach a specially designed grapple bar underneath the satellite. Thuot stands on the end of the Remote Manipulator System's (RMS) arm while Hieb and Akers are on Portable Foot Restraints (PFR) affixed to Endeavour's portside and the Multipurpose Support Structure (MPESS), respectively. The sections of Earth which form the backdrop for the scene are blanketed with thousands of square miles of clouds. Photo credit: NASA
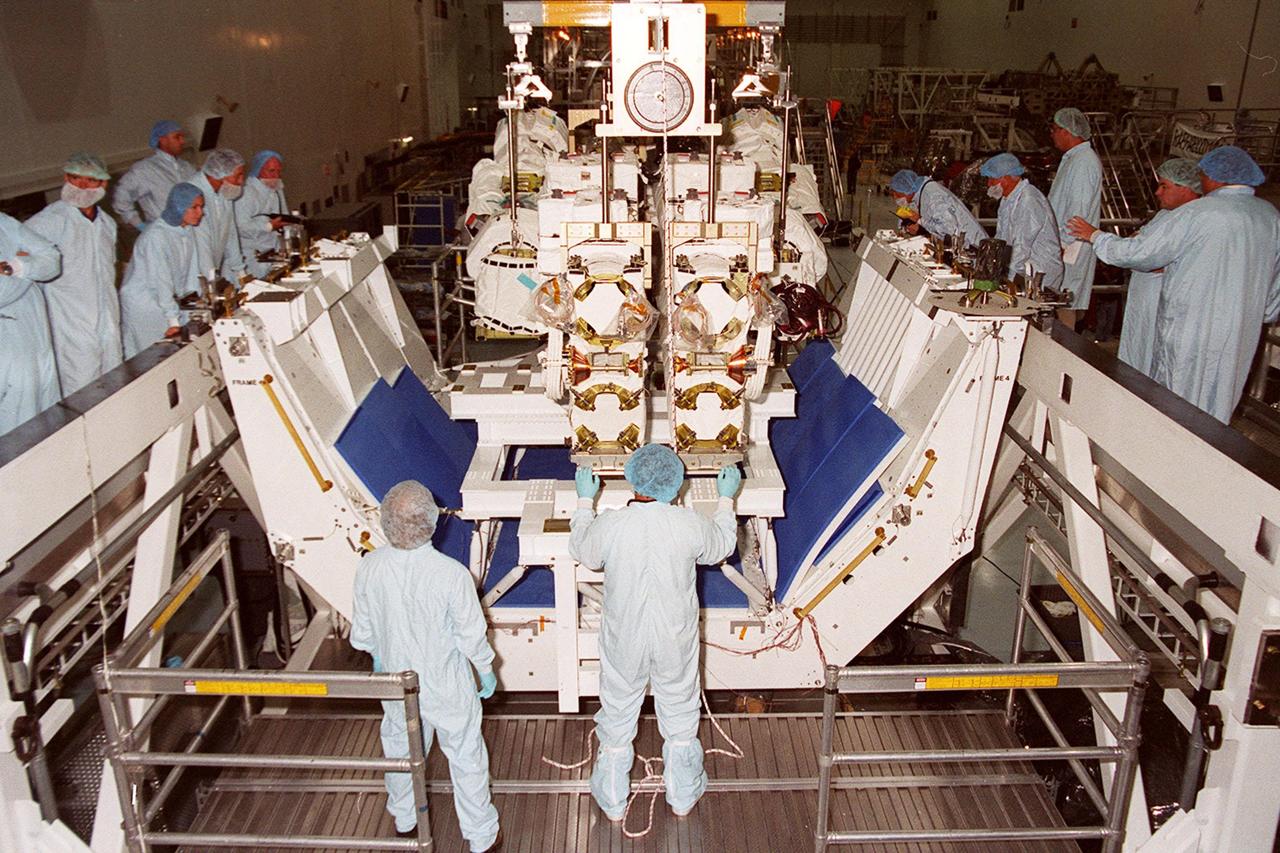
The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) is lowered onto a test stand in the Space Station Processing Facility. At the test stand the SSRMS will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) now occupies one of the work stands in the Space Station Processing Facility. There it will be mated to its payload carrier and later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

Backdropped against the Earth, the Hubble Space Telescope (HST)is shown sporting new and modified solar arrays stowed against its barrel. Orbiting Earth at an altitude of 325 nautical miles, an astronaut begins other repairs of the HST while perched atop a foot restraint on shuttle Endeavour's remote manipulator system arm. The 59th and final Shuttle flight of 1993 was one of most challenging and complex marned missions ever attempted. During record five back-to-back space walks totaling 35 hours and 28 minutes, two teams of astronauts completed the first servicing of the HST. The STS-061 mission was launched aboard Space Shuttle Endeavor on December 2, 1993.

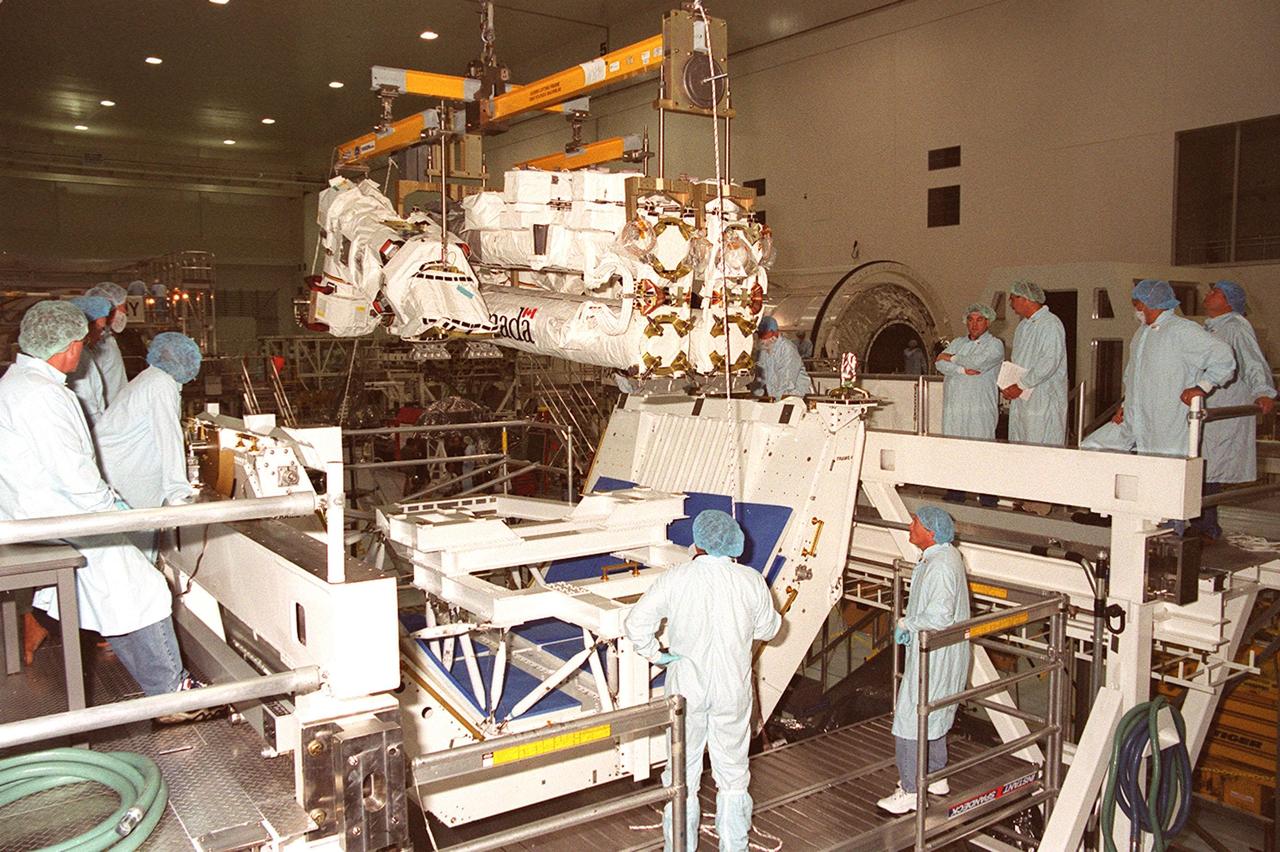
Workers in the Space Station Processing Facility help guide the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) suspended from an overhead crane. The SSRMS is being moved to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
With gentle guidance, the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) is lowered by crane onto a test stand in the Space Station Processing Facility. At the test stand the SSRMS it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

The main objective of the STS-100 mission, the sixth International Space Station (ISS) assembly flight, was the delivery and installation of the Canadian-built Space Station Remote Manipulator System (SSRMS), or Canadarm2. In this photograph, astronaut Scott E. Parazynski, mission specialist, works with cables associated with the robotic arm during one of two days of extravehicular activity (EVA). Both space walks were shared with Chris A. Hadfield, mission specialist representing the Canadian Space Agency (CSA), who is visible in the helmet visor of Parazynski. STS-100 launched April 19, 2001 aboard the Space Shuttle Orbiter Endeavour for an 11 day mission.

CAPE CANAVERAL, Fla. --- A tugboat tows the Pegasus barge through the turn basin in the Launch Complex 39 Area at NASA's Kennedy Space Center. The flag at right signifies that space shuttle Endeavour is still on orbit on the STS-123 mission. The barge is carrying external tank No. 128 for space shuttle Discovery's STS-124 mission. After offloading, the tank will be transported to the Vehicle Assembly Building. On the STS-124 mission, Discovery will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System to the International Space Station. Discovery is targeted for launch on May 25. Photo credit: NASA/Dimitri Gerondidakis

Workers in the Space Station Processing Facility help maneuver an overhead crane above the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS). The crane will lift and transfer the SSRMS to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

Workers in the Space Station Processing Facility help maneuver the Space Station Remote Manipulator System (SSRMS) onto a test stand. A component of the International Space Station provided by the Canadian Space Agency, the SSRMS will be mated to its payload carrier and later installed into the payload bay of Space Shuttle Endeavour for launch to the Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
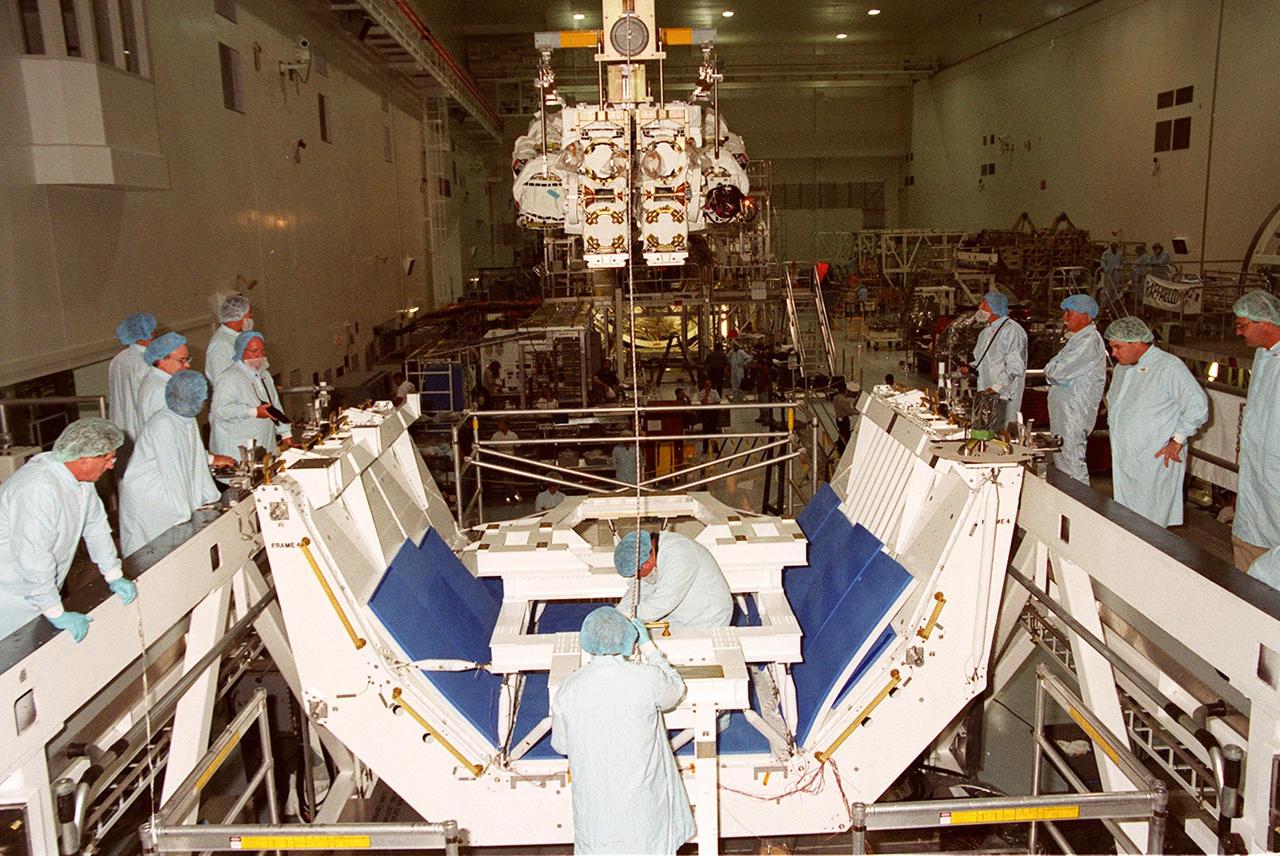
In the Space Station Processing Facility, the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), suspended from an overhead crane, zeroes in on its destination, the test stand below. At the test stand the SSRMS it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
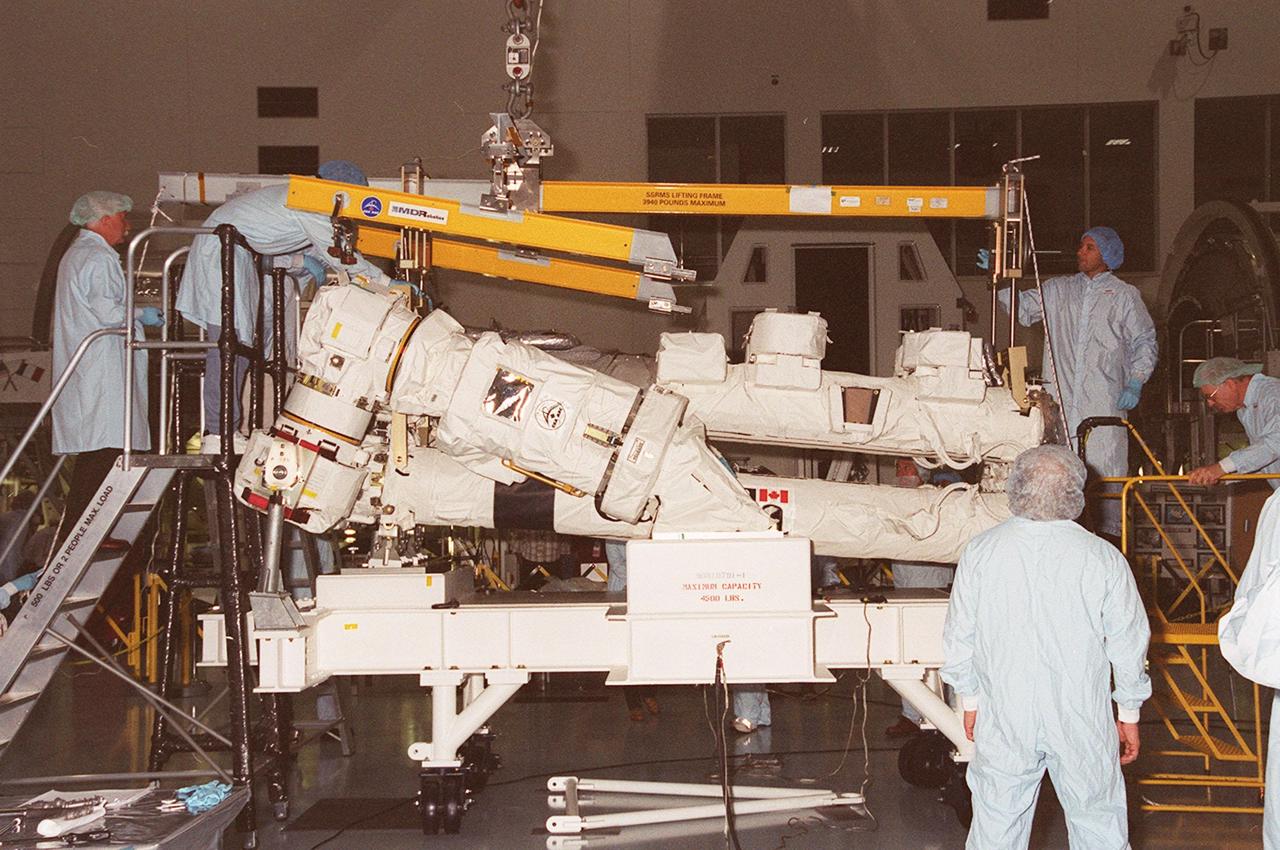
Workers in the Space Station Processing Facility attach an overhead crane to the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS). The crane will lift and transfer the SSRMS to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
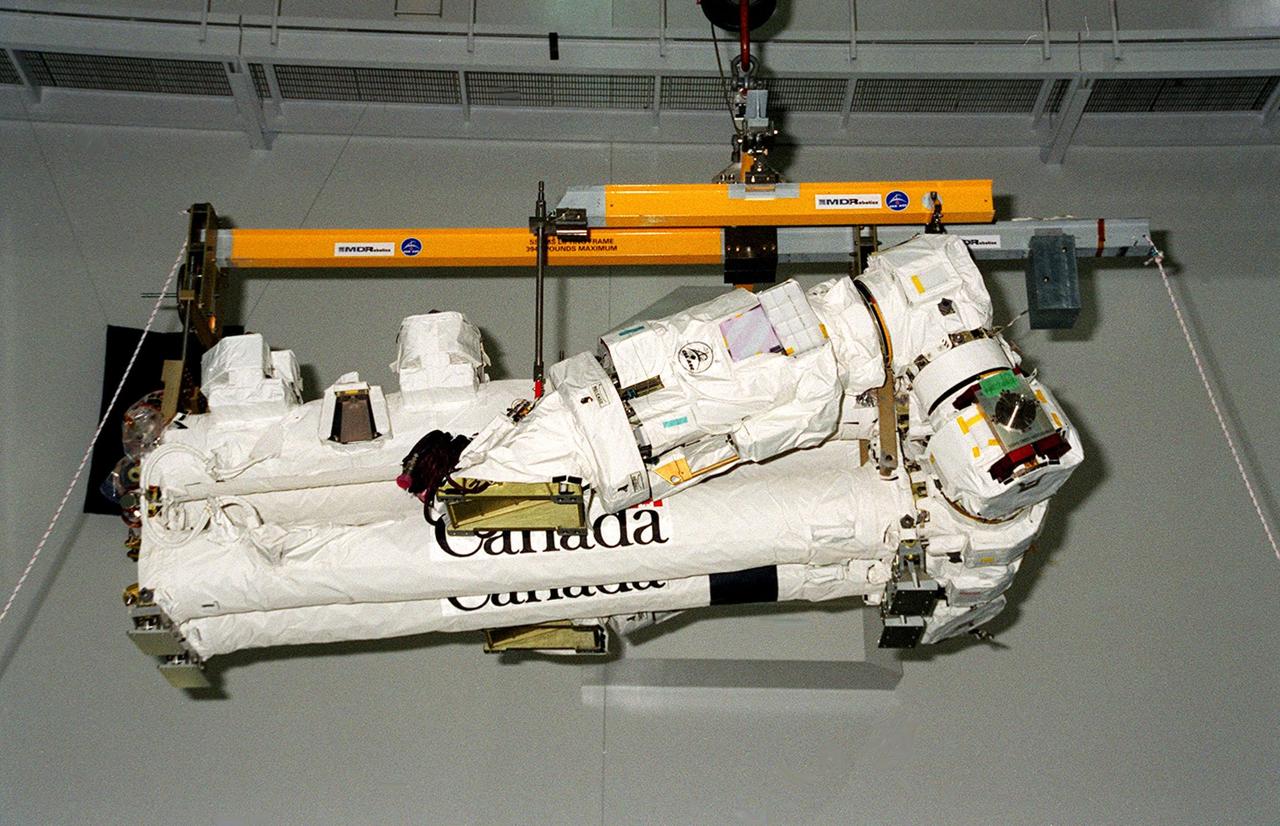
An overhead crane in the Space Station Processing Facility carries the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) through the air to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
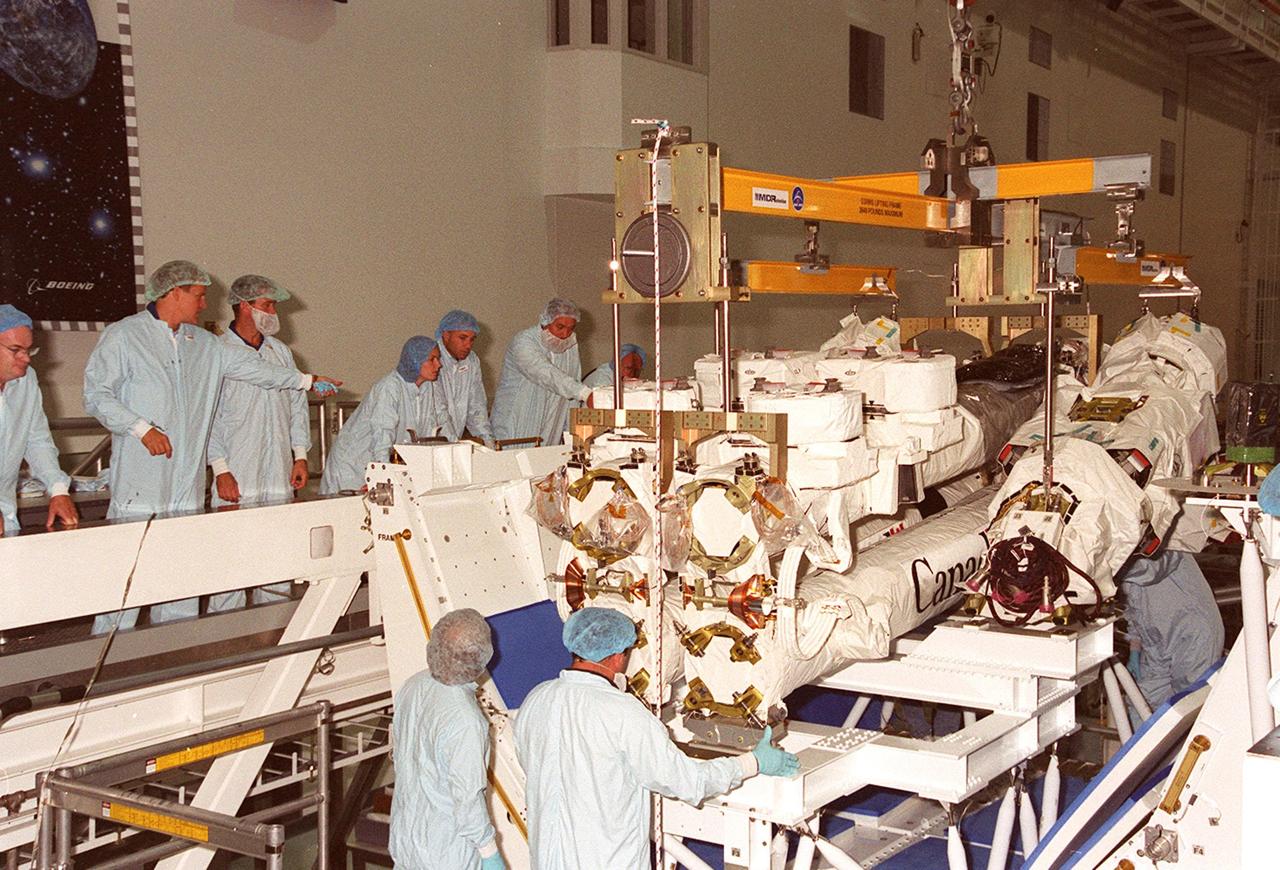
The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) finally rests on a test stand in the Space Station Processing Facility. At the test stand the SSRMS will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

In the White Room, STS-100 Commander Kent V. Rominger (center) is helped by closeout crew members (left to right) Jean Alexander, Danny Wyatt and Rick Welty before entering Space Shuttle Endeavour. The White Room is an environmental chamber at the end of the Orbiter Access Arm that provides entry into the orbiter on the launch pad. The mission will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Canadian-built Space Station Remote Manipulator System and the UHF Antenna. Two spacewalks are planned for installation of the SSRMS, which will be performed by Parazynski and Hadfield. The mission is also the inaugural flight of Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

In the White Room, STS-100 Pilot Jeffrey S. Ashby chats with closeout crew members before he enters Space Shuttle Endeavour. With his back to the camera is Rick Welty; second from left is Rene Arriens. The White Room is an environmental chamber at the end of the Orbiter Access Arm that provides entry into the orbiter on the launch pad. The mission will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Canadian-built Space Station Remote Manipulator System and the UHF Antenna. Two spacewalks are planned for installation of the SSRMS, which will be performed by Mission Specialists Scott E. Parazynski and Chris A. Hadfield, who is with the Canadian Space Agency. The mission is also the inaugural flight of Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

In the White Room, STS-100 Mission Specialist Yuri V. Lonchakov (center) is checked by closeout crew members (from left) Greg Johnson, Danny Wyatt and Rene Arriens before entering Space Shuttle Endeavour. The White Room is an environmental chamber at the end of the Orbiter Access Arm that provides entry into the orbiter on the launch pad. The mission will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Canadian-built Space Station Remote Manipulator System and the UHF Antenna. Two spacewalks are planned for installation of the SSRMS, which will be performed by Mission Specialists Scott E. Parazynski and Chris A. Hadfield, who is with the Canadian Space Agency. The mission is also the inaugural flight of Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

This STS-113 photograph shows an incredible view of the Space Shuttle Endeavour's payload bay. The blackness of space, Earth's moon (upper right frame), and a thin slice of Earth's horizon which runs vertically across the photograph, form the back drop for this photograph. The remote manipulator system (RMS) robotic arm is visible in lower right frame. The 16th American assembly flight and 112th overall American flight to the International Space Station (ISS) launched on November 23, 2002 from Kennedy's launch pad 39A aboard the Space Shuttle Orbiter Endeavour STS-113. Mission objectives included the installation and activation of the Port 1 Integrated Truss Assembly (P1). The first major component installed on the left side of the Station, the P1 truss provides three additional External Thermal Control System radiators. Weighing in at 27,506 pounds, the P1 truss is 45 feet (13.7 meters) long, 15 feet (4.6 meters) wide, and 13 feet (4 meters) high. Three space walks, aided by the use of the Robotic Manipulator Systems of both the Shuttle and the Station, were performed in the installation of P1.

STS061-98-050 (9 Dec 1993) --- Astronaut F. Story Musgrave, anchored on the end of the Remote Manipulator System (RMS) arm, prepares to be elevated to the top of the towering Hubble Space Telescope (HST) to install protective covers on magnetometers. Astronaut Jeffrey A. Hoffman (bottom of frame) assisted Musgrave with final servicing tasks on the telescope, wrapping up five days of extravehicular activities (EVA).

STS061-99-009 (9 Dec 1993) --- Sunlight reflects off the Space Shuttle Endeavour's aft windows and the shiny Hubble Space Telescope (HST) prior to its post-servicing deployment near the end of the eleven-day mission. A handheld Hasselblad camera was used inside Endeavour's cabin to record the image.

STS061-105-026 (7 Dec. 1993) --- Astronaut Jeffrey A. Hoffman signals directions to European Space Agency (ESA) astronaut Claude Nicollier, as the latter controls the Remote Manipulator System (RMS) arm during the third of five Extravehicular Activities (EVA) on the Hubble Space Telescope (HST) servicing mission. Astronauts Hoffman and F. Story Musgrave earlier changed out the Wide Field\Planetary Camera (WF\PC).

STS061-95-075 (6 Dec 1993) --- Astronauts Kathryn C. Thornton and Thomas D. Akers work to remove one of the solar arrays on the Hubble Space Telescope (HST) on the second of five extravehicular activity?s (EVA). The two space walkers later replaced both solar array panels. Part of Australia is in the background.
STS061-86-048 (5 Dec 1993) --- Astronauts F. Story Musgrave (foreground) and Jeffrey A. Hoffman are pictured near the end of the first of five extravehicular activity?s (EVA). Musgrave works at the Solar Array Carrier (SAC) in the Space Shuttle Endeavour's cargo bay. Hoffman, anchored to a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, waits to be maneuvered to the forward payload bay. The original solar array panels are partially visible at top, while their replacements remain stowed in foreground. The crew's second pair of space walkers -- astronauts Kathryn C. Thornton and Thomas D. Akers -- later changed the solar arrays on the mission's second EVA.

STS057-31-030 (25 June 1993) --- Astronaut Nancy J. Sherlock operates Endeavour's remote manipulator system (RMS) during the June 25 extravehicular activity of two crewmates. At one point, astronaut G. David Low, while his feet were anchored to a special restraint device on the end of the RMS arm, moved about, with Sherlock's aid, while holding astronaut Peter J. K. (Jeff) Wisoff. The activity represented an evaluation of techniques which might be used on planned future missions -- a 1993 servicing visit to the Hubble Space Telescope and later space station work -- which will require astronauts to frequently lift objects of similar sized bulk.

STS061-102-010 (9 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave team to replace one of two Solar Array Drive Electronics (SADE) units on the Hubble Space Telescope (HST). Musgrave is standing on a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The black object, in upper left corner, is part of the window frame, through which this 70mm frame was exposed, inside Endeavour's cabin.

STS061-104-007 (5 Dec 1993) --- Astronaut F. Story Musgrave, holding to one of many strategically placed handrails on the Hubble Space Telescope (HST), is photographed during the first of five extravehicular activity?s (EVA) on the HST-servicing mission, aboard the Space Shuttle Endeavour.