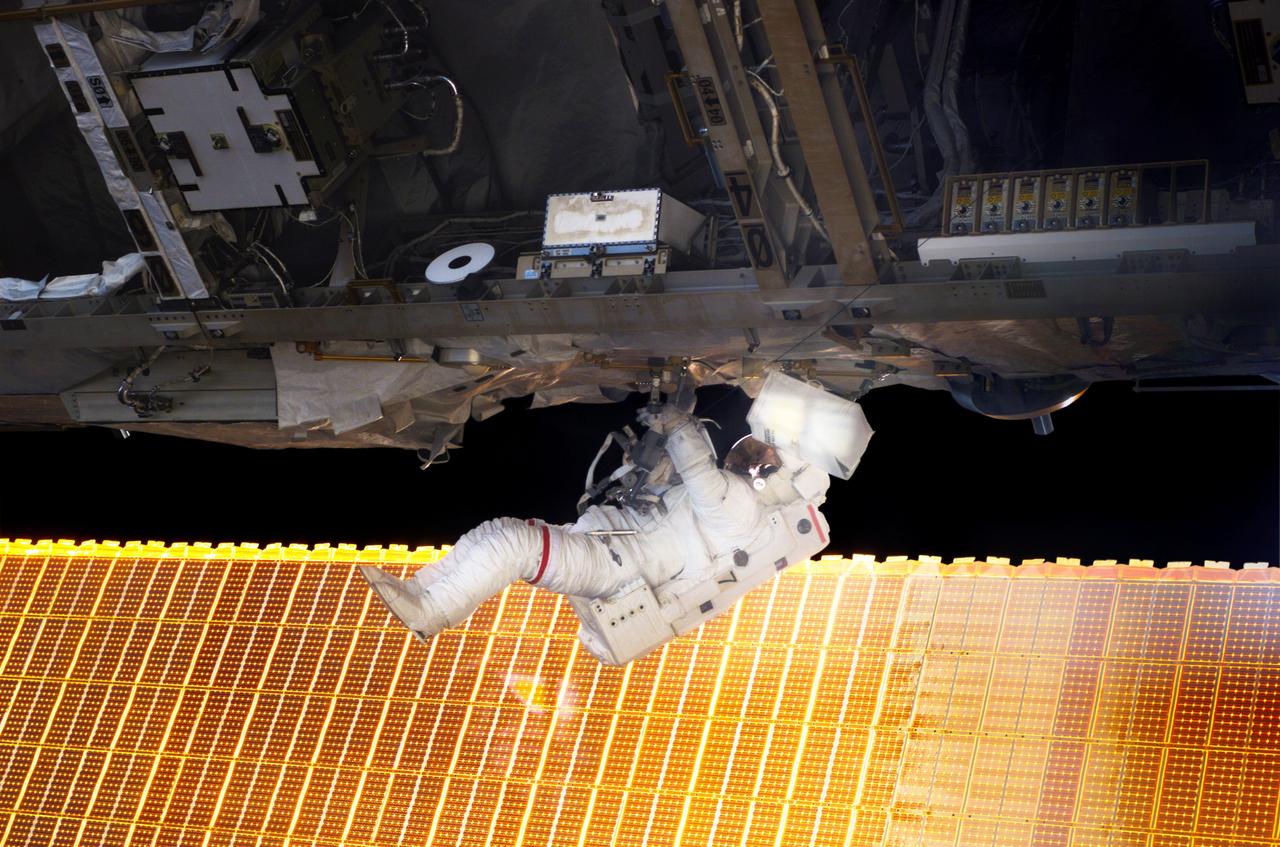
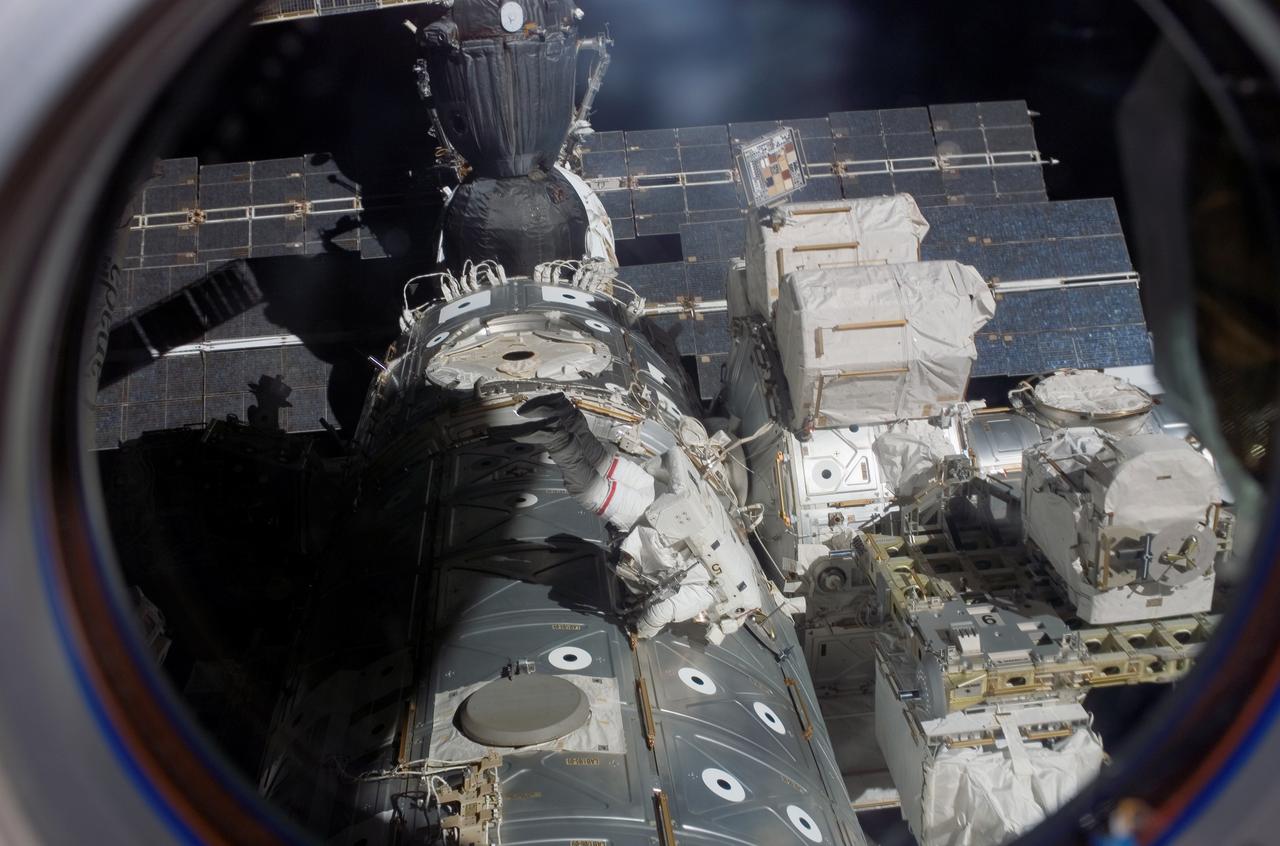
Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module (MPLM) and the External Stowage Platform-2. In this photograph, astronaut Soichi Noguchi, STS-114 mission specialist representing the Japan Aerospace Exploration Agency (JAXA), participates in the mission’s first scheduled session of Extra-Vehicular Activity (EVA). Noguchi and crew mate Stephen K. Robinson (out of frame) completed a demonstration of Shuttle thermal protection repair techniques and enhancements to the ISS’s attitude control system during the successful 6 hour, 50 minute space walk.
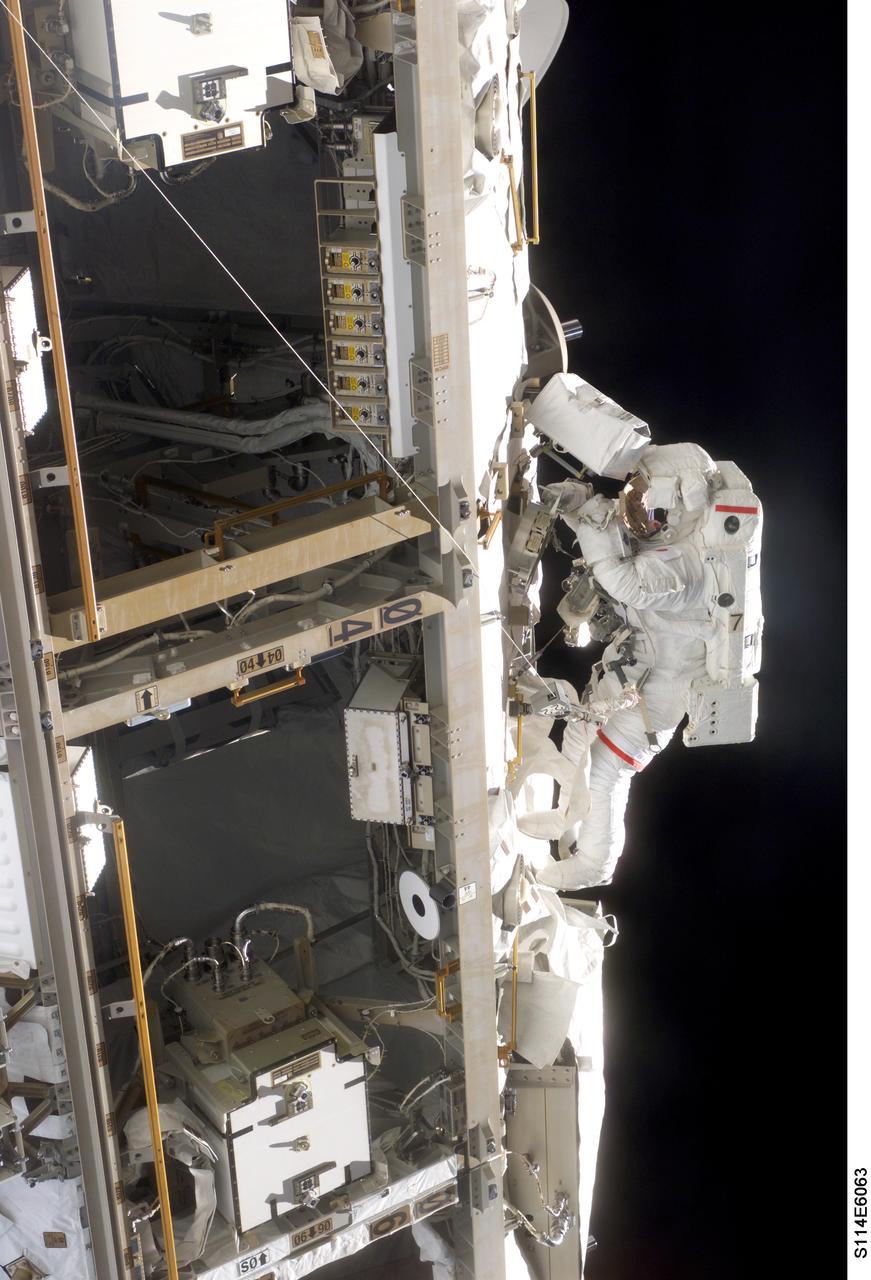
Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module (MPLM) and the External Stowage Platform-2. In this photograph, astronaut Soichi Noguchi, STS-114 mission specialist representing the Japan Aerospace Exploration Agency (JAXA), participates in the mission’s first scheduled session of Extra Vehicular Activity (EVA). Noguchi and crew mate Stephen K. Robinson (out of frame) completed a demonstration of Shuttle thermal protection repair techniques and enhancements to the ISS’s attitude control system during the successful 6 hour, 50 minute space walk.

Space Shuttle mission STS-61 onboard view taken by a fish-eyed camera lens showing astronauts Story Musgrave and Jeffrey Hoffman's Extra Vehicular Activity (EVA) to repair the Hubble Space Telescope (HST).
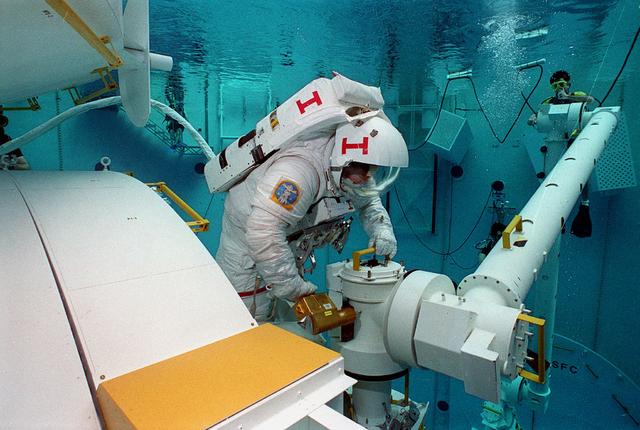
This photograph was taken in the Marshall Space Flight Center (MSFC) Neutral Buoyancy Simulator (NBS) during the testing of the Japanese Experimental Module. The NBS provided the weightless environment encountered in space needed for testing and the practices of extra-vehicular activities.

Extra vehicular activity - Astronaut Kathy Thornton on the end of orbiter Endeavour's remote manipulator system arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST).

Back dropped by the blue and white Earth is a Materials International Space Station Experiment (MISSE) on the exterior of the Station. The photograph was taken during the second bout of STS-118 Extra Vehicular Activity (EVA). MISSE collects information on how different materials weather in the environment of space.

This STS-61 onboard photo depicts Astronaut and mission specialist Kathryn Thornton performing the 2nd extra-vehicular activity (EVA) of the STS-61 mission. Thornton, along with astronaut and mission specialist Thomas Akers (out of frame), performed the task of replacing the solar arrays. The EVA lasted 6 hours and 35 minutes. Launched December 1, 1993 aboard the Space Shuttle Orbiter Endeavor, the STS-61 mission was solely dedicated to servicing the HST.

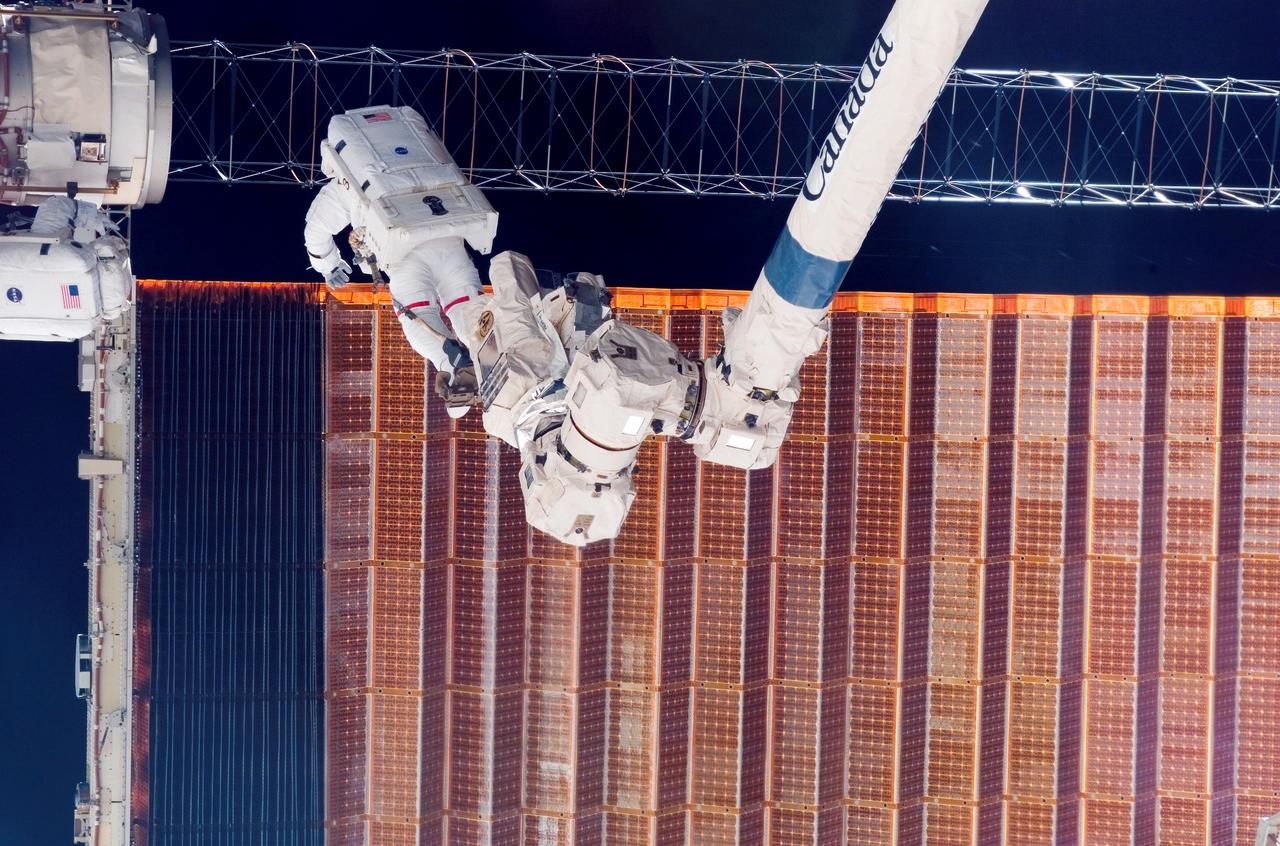
As the construction continued on the International Space Station (ISS), STS-118 Astronaut Rick Mastracchio and Canada Space Agency representative Dave Williams (out of frame), participated in the first session of Extra Vehicular Activity (EVA) for the mission. During the 6 hour, 17 minute space walk, the two attached the Starboard 5 (S5) segment of truss, retracted the forward heat rejecting radiator from the Port 6 (P6) truss, and performed several get ahead tasks.
As the construction continued on the International Space Station (ISS), STS-118 Astronaut Rick Mastracchio and Canada Space Agency's Dave Williams (out of frame), participated in the first session of Extra Vehicular Activity (EVA) for the mission. During the 6 hour, 17 minute space walk, the two attached the Starboard 5 (S5) segment of truss, retracted the forward heat rejecting radiator from the Port 6 (P6) truss, and performed several get ahead tasks.

A diver tests a secondary camera and maneuvering platform in Marshall's Neutral Buoyancy Simulator (NBS).The secondary camera will be beneficial for recording repairs and other extra vehicular activities (EVA) the astronuats will perform while making repairs on the Hubble Space Telescope (HST). The maneuvering platform was developed to give the astronauts something to stand on while performing maintenance tasks. These platforms were developed to be mobile so that the astronauts could move them to accommadate different sites.

iss072e422426 (Dec. 27, 2024) --- NASA astronaut and Expedition 72 Commander Suni Williams wears a virtual reality headset and practices emergency maneuvers a spacewalker would use in the unlikely event they became untethered from the International Space Station. During spacewalks astronauts wear U.S. spacesuits with a jetpack installed called a SAFER, or Simplified Aid for EVA (Extra Vehicular Activity) Rescue, that contains a controller and thrusters used to guide a crew member back to the safety of the orbital outpost.
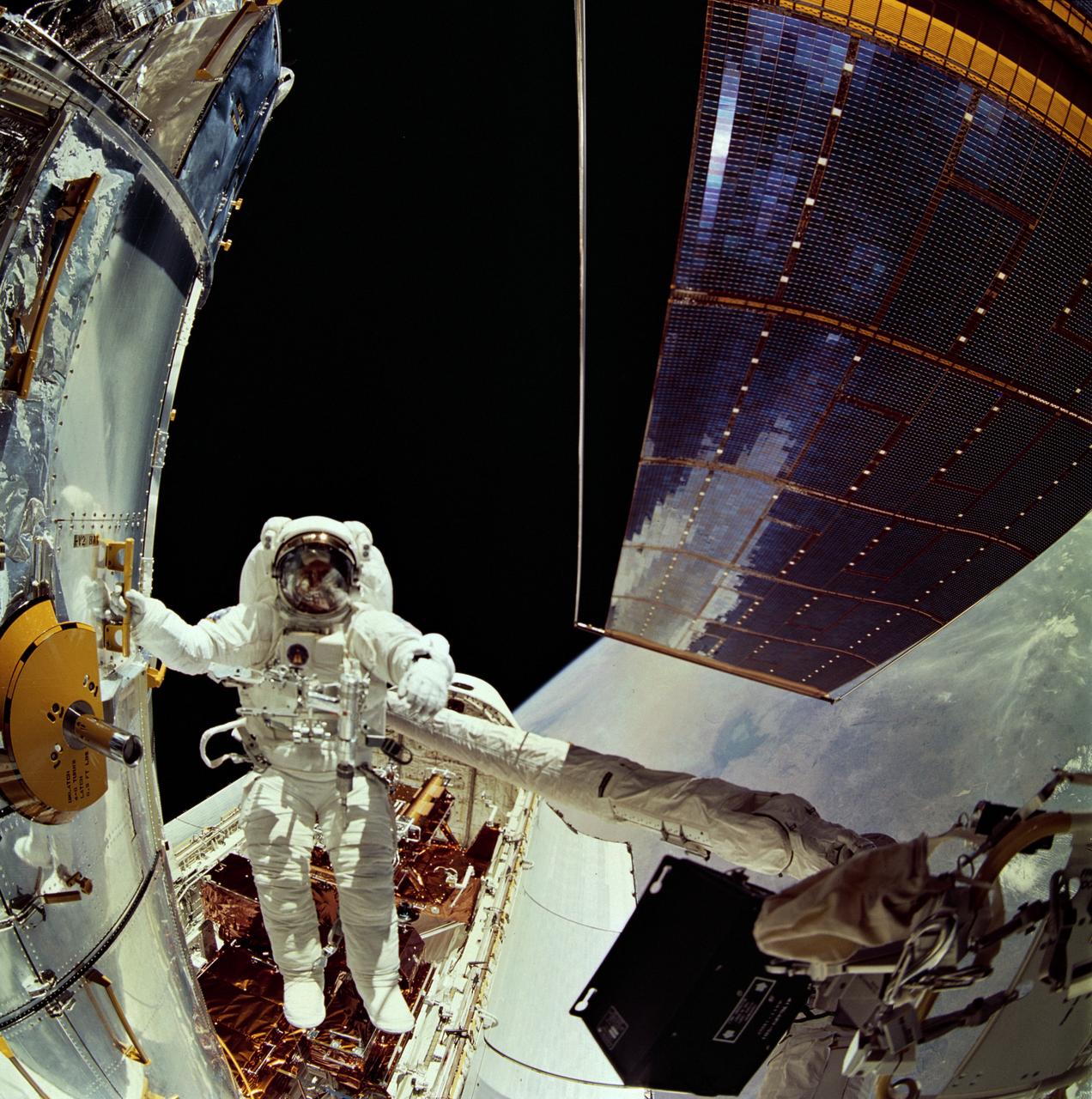
This is a Space Shuttle mission STS-61 onboard view showing astronauts Story Musgrave and Jeffrey Hoffman preforming repairs to the Hubble Space Telescope (HST) during their Extra Vehicular Activity (EVA). Astronauts' work was made easier by the HST's many crew aids. Astronaut Musgrave makes use of one of the spacecraft's handholds. Launched on December 1, 1993, the Space Shuttle Orbiter Endeavor STS-061 mission was the 59th Shuttle flight.

In this photograph, a skylab-4 astronaut performs Extra Vehicular Activities (EVA) outside of the lab. The third crew (Skylab-4) spent 84 days in the orbiting laboratory. The solar observatory was designed for full exposure to the Sun throughout most of the Skylab mission. Solar energy was transformed into electrical power for operation of all spacecraft systems. The proper operation of these solar arrays was vital to the mission.
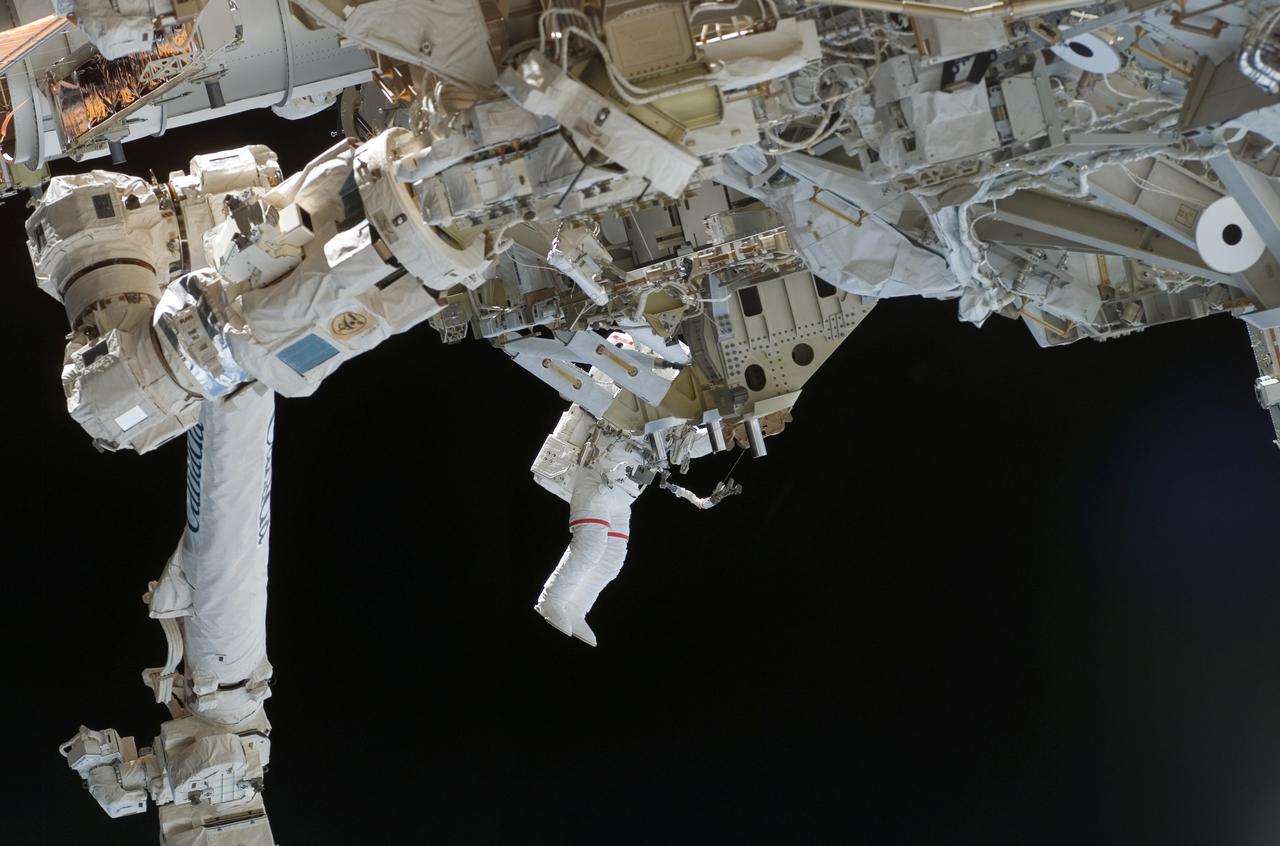
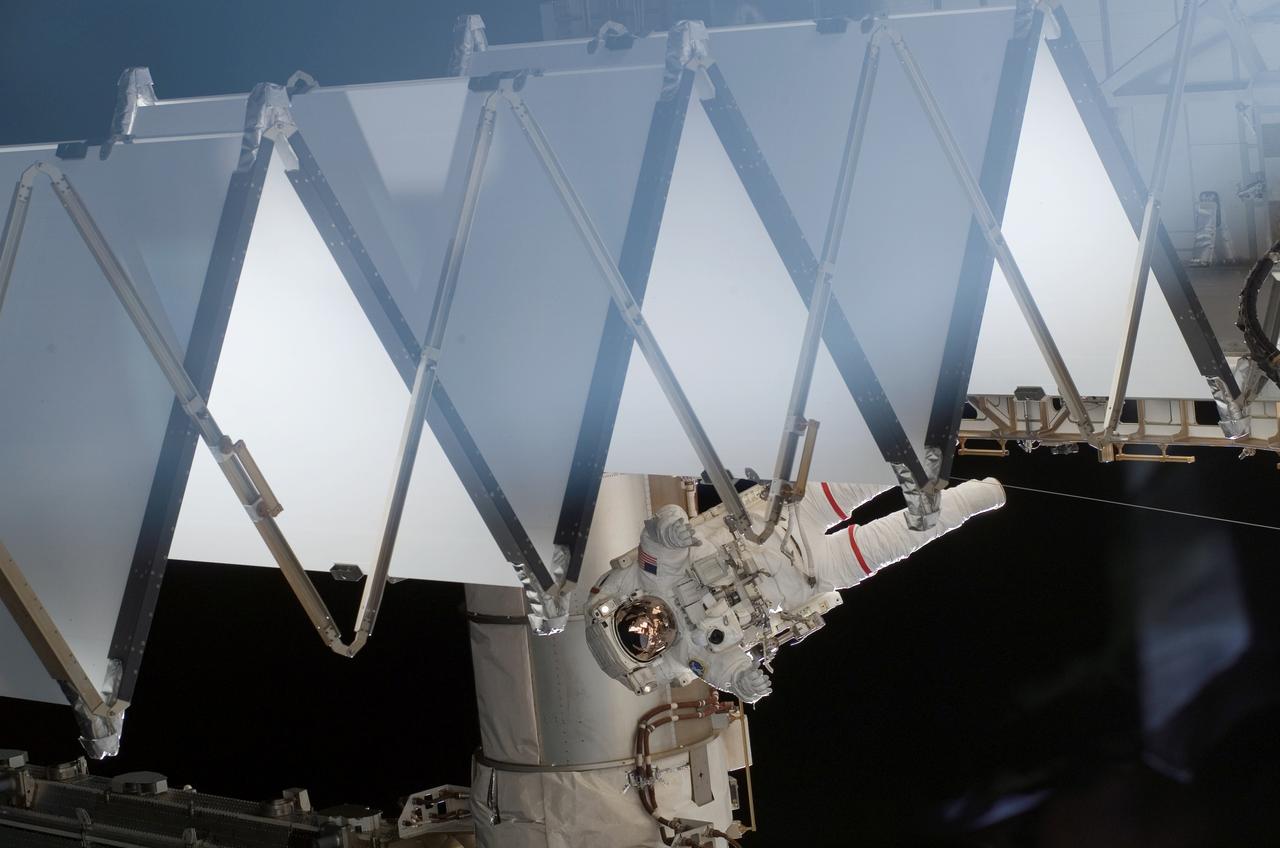
STS-116 astronaut and mission specialist, Robert Curbeam, along with the European Space Agency’s (ESA) Christer Fuglesang (partially out of the frame), are anchored to the International Space Station’s Canadarm2 foot restraints. The two were working on the port overhead solar array wing on the Station’s P6 truss during the mission’s fourth session of Extra Vehicular Activity (EVA). For 6 hours and 38 minutes, the space walkers used specially prepared, tape insulated tools to guide the array wing neatly inside its blanket box.
As the construction continued on the International Space Station (ISS), STS-118 Astronaut Rick Mastracchio and Canada Space Agency's Dave Williams (out of frame), participated in the first session of Extra Vehicular Activity (EVA) for the mission. During the 6 hour, 17 minute space walk, the two attached the Starboard 5 (S5) segment of truss, retracted the forward heat rejecting radiator from the Port 6 (P6) truss, and performed several get ahead tasks.
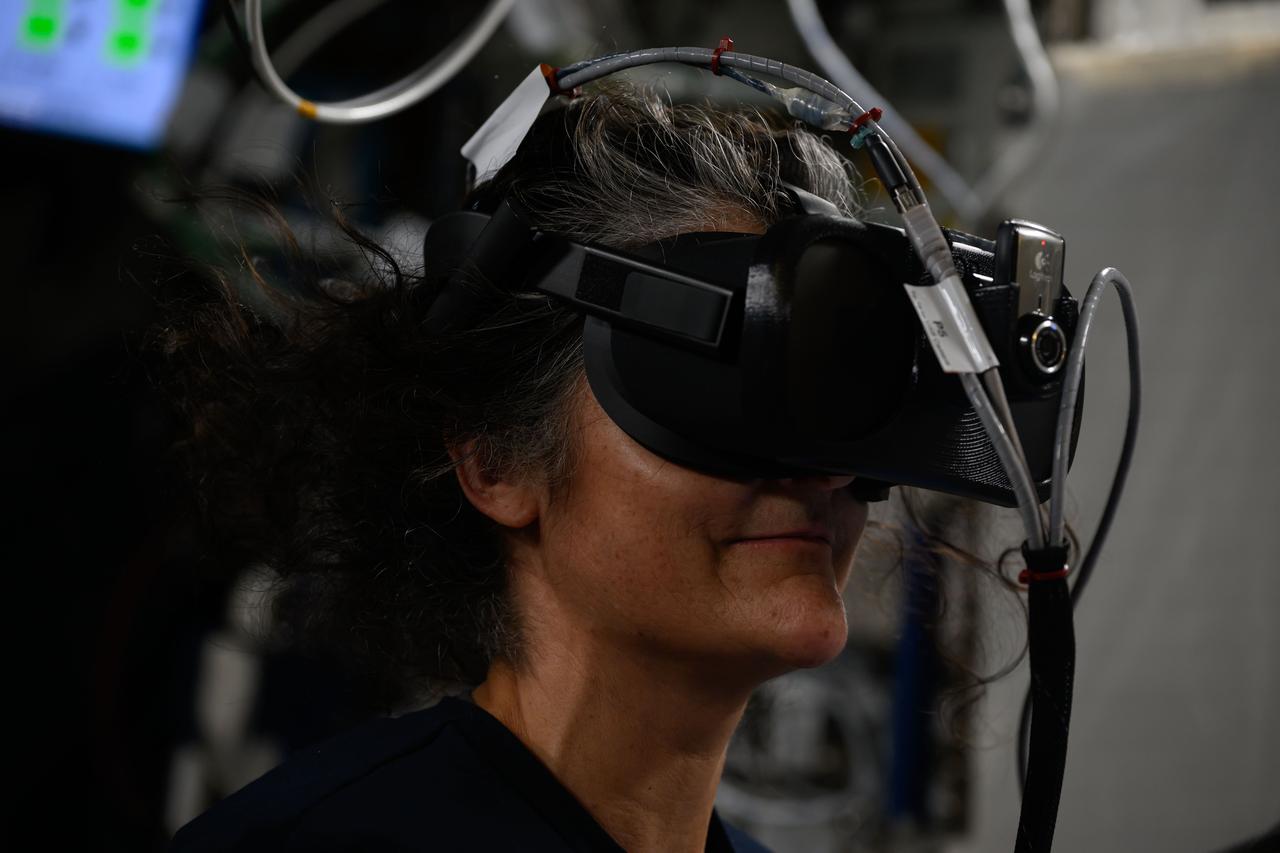
iss072e422431 (Dec. 27, 2024) --- NASA astronaut and Expedition 72 Commander Suni Williams wears a virtual reality headset and practices emergency maneuvers a spacewalker would use in the unlikely event they became untethered from the International Space Station. During spacewalks astronauts wear U.S. spacesuits with a jetpack installed called a SAFER, or Simplified Aid for EVA (Extra Vehicular Activity) Rescue, that contains a controller and thrusters used to guide a crew member back to the safety of the orbital outpost.

STS-117 astronauts and mission specialists Patrick Forrester and Steven Swanson (out of frame), participated in the second Extra Vehicular Activity (EVA) as construction resumed on the International Space Station (ISS). Among other tasks, the two removed all of the launch locks holding the 10 foot wide solar alpha rotary joint in place and began the solar array retraction. The primary mission objective was the installment of the second and third starboard truss segments (S3 and S4).

CAPE CANAVERAL, Fla. – Suspended by a crane in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the Cupola module is being moved to a workstand. The module was delivered to Kennedy by the European Space Agency in 2004 from Alenia Spazio in Turin, Italy. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – Suspended by a crane in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the Cupola module moves closer to the workstand at right. The module was delivered to Kennedy by the European Space Agency in 2004 from Alenia Spazio in Turin, Italy. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – Workers in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida oversee placement of the Cupola module onto a workstand. The module was delivered to Kennedy by the European Space Agency in 2004 from Alenia Spazio in Turin, Italy. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

STS-49, the first flight of the Space Shuttle Orbiter Endeavour, lifted off from launch pad 39B on May 7, 1992 at 6:40 pm CDT. The STS-49 mission was the first U.S. orbital flight to feature 4 extravehicular activities (EVAs), and the first flight to involve 3 crew members working simultaneously outside of the spacecraft. The primary objective was the capture and redeployment of the INTELSAT VI (F-3) which was stranded in an unusable orbit since its launch aboard the Titan rocket in March 1990. In this STS-49 onboard photo, Astronaut Kathryn Thornton joins three struts together during her Extra Vehicular Activity (EVA).

CAPE CANAVERAL, Fla. – Suspended by a crane in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the Cupola module is lowered toward the workstand. The module was delivered to Kennedy by the European Space Agency in 2004 from Alenia Spazio in Turin, Italy. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

STS-117 astronauts and mission specialists Jim Reilly (center frame), and John “Danny” Olivas (bottom center), participated in the first Extra Vehicular Activity (EVA) as construction resumed on the International Space Station (ISS). Among other tasks, the two connected power, data, and cooling cables between trusses 1 (S1) and 3 (S3), released the launch restraints from and deployed the four solar array blanket boxes on S4, and released the cinches and winches holding the photovoltaic radiator on S4. The primary mission objective was the installment of the second and third starboard truss segments (S3 and S4).

As the construction continued on the International Space Station (ISS), STS-118 Astronaut Dave Williams, representing the Canadian Space Agency, participated in the fourth and final session of Extra Vehicular Activity (EVA). During the 5 hour space walk, Williams and Expedition 15 engineer Clay Anderson (out of frame) installed the External Wireless Instrumentation System Antenna, attached a stand for the shuttle robotic arm extension boom, and retrieved the two Materials International Space Station Experiments (MISSE) for return to Earth. MISSE collects information on how different materials weather in the environment of space.

As the construction continued on the International Space Station (ISS), STS-118 astronaut and mission specialist, Dave Williams, representing the Canadian Space Agency, was anchored on the foot restraint of the Canadarm2 as he participated in the second session of Extra Vehicular Activity (EVA) for the mission. Assisting Williams was Rick Mastracchio (out of frame). During the 6 hour, 28 minute space walk, the two removed a faulty control moment gyroscope (CMG-3) and installed a new CMG into the Z1 truss. The failed CMG will remain in its temporary stowage location on the exterior of the station until it is returned to Earth on a later Shuttle mission. The new gyroscope is one of four CMGs that are used to control the orbital attitude of the station.

As the construction continued on the International Space Station (ISS), STS-118 astronaut and mission specialist Rick Mastracchio was anchored on the foot restraint of the Canadarm2 as he participated in the third session of Extra Vehicular Activity (EVA) for the mission. Assisting Mastracchio was Expedition 15 flight engineer Clay Anderson (out of frame). During the 5 hour, 28 minute space walk, the two relocated the S-band Antenna Sub-Assembly from the Port 6 (P6) truss to the Port 1 (P1) truss, installed a new transponder on P1 and retrieved the P6 transponder.
As the construction continued on the International Space Station (ISS), STS-118 astronaut and mission specialist Rick Mastracchio participated in the second session of Extra Vehicular Activity (EVA) for the mission. Assisting Mastracchio was Canadian Space Agency representative Dave Williams (out of frame). During the 6 hour, 28 minute space walk, the two removed a faulty control moment gyroscope (CMG-3) and installed a new CMG into the Z1 truss. The failed CMG will remain in its temporary stowage location on the exterior of the station until it is returned to Earth on a later Shuttle mission. The new gyroscope is one of four CMGs that are used to control the orbital attitude of the station.

S66-47856 (11 Aug. 1966) --- Astronaut William A. Anders, backup crew pilot of the Gemini-11 spaceflight, participates in extravehicular activity (EVA) training under zero-gravity conditions aboard a KC-135 aircraft from Wright-Patterson Air Force Base, Dayton, Ohio. He is suited, and he also wears an Extravehicular Life Support System (ELSS) chest pack. Photo credit: NASA

S66-47857 (11 Aug. 1966) --- Astronaut William A. Anders, backup crew pilot of the Gemini-11 spaceflight, participates in extravehicular activity (EVA) training under zero-gravity conditions aboard a KC-135 aircraft from Wright-Patterson Air Force Base, Dayton, Ohio. He is suited, and he also wears an Extravehicular Life Support System (ELSS) chest pack. Photo credit: NASA

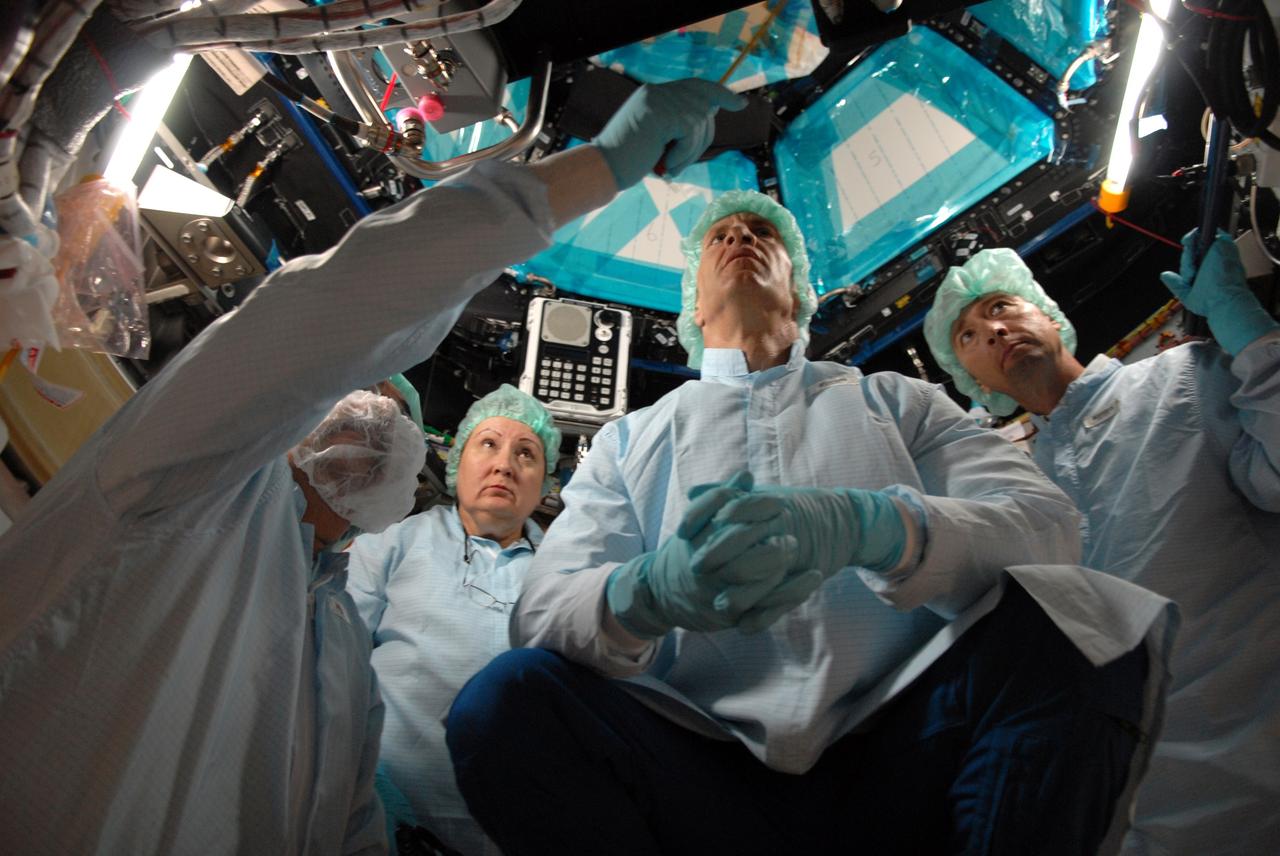
CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Terry Virts conducts a fit check of the robotic workstation, or RWS, in the International Space Station's Cupola module. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronauts Terry Virts, left, and Charles Hobaugh familiarize themselves with the placement and operation of the robotic workstation, or RWS, in the International Space Station's Cupola module. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronauts Terry Virts, left, and Charles Hobaugh familiarize themselves with the operation of the robotic workstation, or RWS, in the International Space Station's Cupola module. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, STS-130 Mission Specialist Nicholas Patrick, practices working on equipment that is part of space shuttle Endeavour's payload on the 32nd assembly flight to the International Space Station. Crew members are at Kennedy for familiarization with mission equipment and hardware, called the crew equipment interface test. The payload on the 32nd assembly flight to the International Space Station includes the Cupola and the Tranquility Node 3. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in the space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is targeted for launch Feb. 4, 2010. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, STS-130 Mission Specialist Robert Behnken (left) practices working on the Cupola, part of space shuttle Endeavour's payload on the mission to the International Space Station. At right is Mission Specialist Nicholas Patrick. Crew members are at Kennedy for familiarization with mission equipment and hardware, called the crew equipment interface test. The payload on the 32nd assembly flight to the International Space Station also includes the Tranquility Node 3. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in the space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is targeted for launch Feb. 4, 2010. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Terry Virts, third from left, discusses the intricacies of the International Space Station's Cupola module with vehicle integration test engineer Louise Kleba of Flight Crew Operations and astronaut Charles Hobaugh, right. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronauts Terry Virts, left, and Charles Hobaugh, pointing, familiarize themselves with the International Space Station's Cupola module. Vehicle integration test engineer Louise Kleba of Flight Crew Operations looks on, at right. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, STS-130 Mission Specialist Robert Behnken becomes familiar with equipment that will be on the mission. Crew members are at Kennedy for familiarization with mission equipment and hardware, called the crew equipment interface test. The payload on the 32nd assembly flight to the International Space Station includes the Cupola and the Tranquility Node 3. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in the space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is targeted for launch Feb. 4, 2010. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Charles Hobaugh, right, conducts a fit check of the robotic workstation, or RWS, in the International Space Station's Cupola module. He is assisted by Boeing technician Terry Camarata, left. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, STS-130 Pilot Terry Virts (right) reviews information about the Cupola, part of space shuttle Endeavour's payload on the mission to the International Space Station. Crew members are at Kennedy for familiarization with mission equipment and hardware, called the crew equipment interface test. The payload on the 32nd assembly flight to the International Space Station also includes the Tranquility Node 3. Cupola will provide a 360-degree panoramic view of activities outside the station and spectacular views of the Earth. Cupola has the capability for command and control workstations to be installed to assist in the space station remote manipulator system and extra vehicular activities. The final element of the space station core, Cupola is targeted for launch Feb. 4, 2010. Photo credit: NASA/Kim Shiflett

The STS-96 mission, the second International Space Station (ISS) assembly and resupply flight, launched on May 27, 1999 aboard the Orbiter Discovery for an almost 10 day mission. The Shuttle's SPACEHAB double module carried internal and resupply cargo for station outfitting and the Russian cargo crane, STRELA, was carried aboard the shuttle in the integrated Cargo Carrier (ICC). In this STS-96 onboard photo of the first Extra Vehicular Activity (EVA), Mission Specialist Tamara Jernigan totes part of the Russian built crane. Jernigans' feet are anchored on a mobile foot restraint cornected to the Shuttle's Remote Manipulator System (RMS) operated by Mission Specialist Ellen Ochoa. The STS-96 flight was the first to perform docking with the ISS.

Apollo 11 astronauts, (left to right) Edwin E. Aldrin Jr., Lunar Module pilot; Michael Collins, Command Module pilot; and Neil A. Armstrong, commander, are showing a two-pound Moon rock to Frank Taylor, director of the Smithsonian Institute in Washington D.C. The rock was picked up from the Moon’s surface during the Extra Vehicular Activity (EVA) of Aldrin and Armstrong following man’s first Moon landing and was was presented to the Institute for display in the Art and Industries Building. The Apollo 11 mission, launched from the Kennedy Space Center, Florida via the Marshall Space Flight Center (MSFC) developed Saturn V launch vehicle on July 16, 1969 and safely returned to Earth on July 24, 1969. With the success of Apollo 11, the national objective to land men on the Moon and return them safely to Earth had been accomplished.
CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Charles Hobaugh, hands folded, conducts a fit check of the robotic workstation, or RWS, in the International Space Station's Cupola module. From left, he is assisted by Boeing technician Terry Camarata, vehicle integration test engineer Louise Kleba of Flight Crew Operations, and engineer David Jackson, from Johnson Space Center. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Charles Hobaugh, right, conducts a fit check of the robotic workstation, or RWS, in the International Space Station's Cupola module. He is assisted by Boeing technician Terry Camarata, left, and engineer David Jackson, from Johnson Space Center. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

Launched October 7, 2002 aboard the Space Shuttle Orbiter Atlantis, the STS-112 mission lasted 11 days and performed three sessions of Extra Vehicular Activity (EVA). Its primary mission was to install the Starboard (S1) Integrated Truss Structure and Equipment Translation Aid (CETA) Cart to the International Space Station (ISS). The S1 truss provides structural support for the orbiting research facility's radiator panels, which use ammonia to cool the Station's complex power system. The S1 truss, attached to the S0 (S Zero) truss installed by the previous STS-110 mission, flows 637 pounds of anhydrous ammonia through three heat rejection radiators. The truss is 45-feet long, 15-feet wide, 10-feet tall, and weighs approximately 32,000 pounds. The CETA is the first of two human-powered carts that will ride along the International Space Station's railway providing a mobile work platform for future extravehicular activities by astronauts. This is a view of the newly installed S1 Truss as photographed during the mission's first scheduled EVA. The Station's Canadarm2 is in the foreground. Visible are astronauts Piers J. Sellers (lower left) and David A. Wolf (upper right), both STS-112 mission specialists.
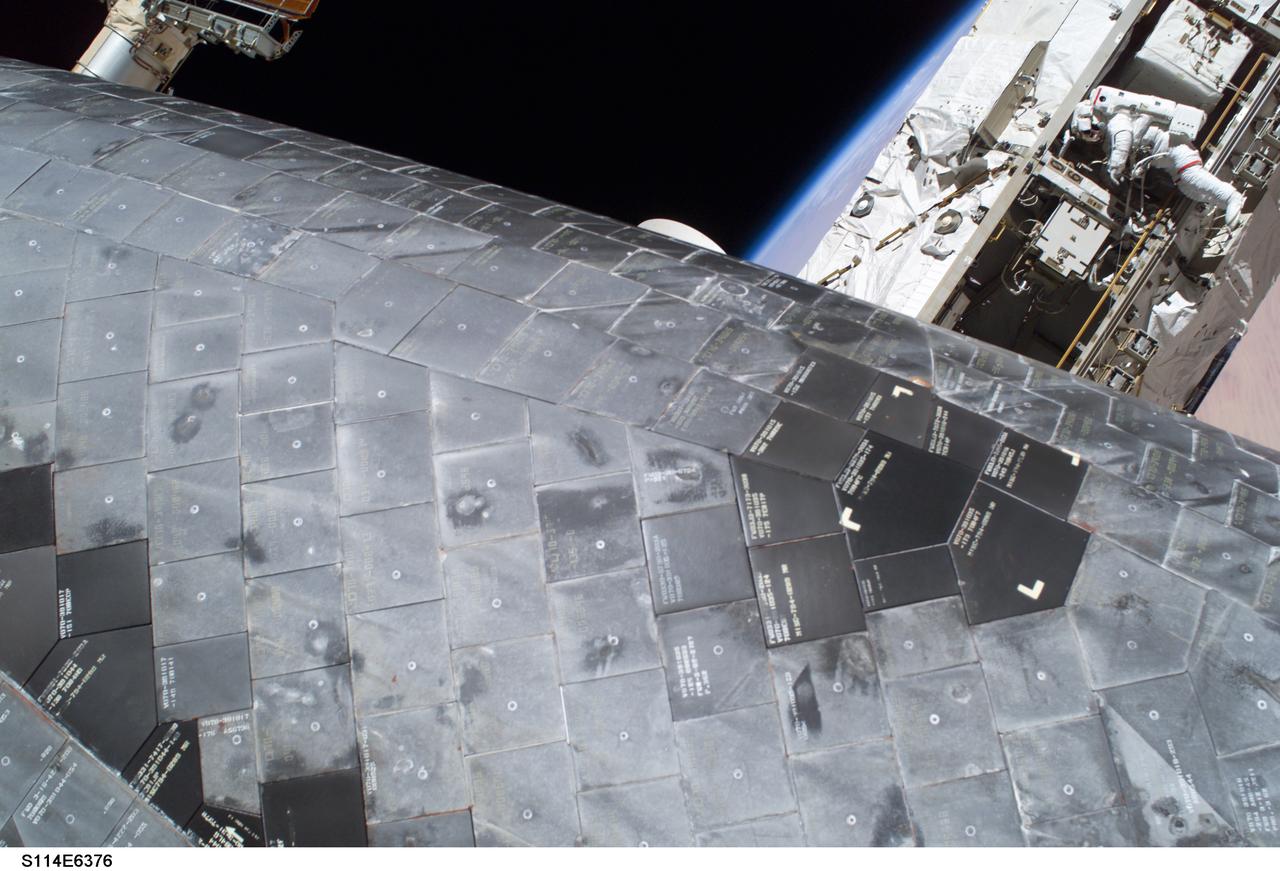
Launched on July 26 2005, from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. This close up of the thermal tiles was taken by astronaut Stephen K. Robinson, STS-114 mission specialist (out of frame). Astronaut Soichi Noguchi, STS-114 mission specialist representing the Japan Aerospace Exploration (JAXA), can be seen in the background perched on a Space Station truss.
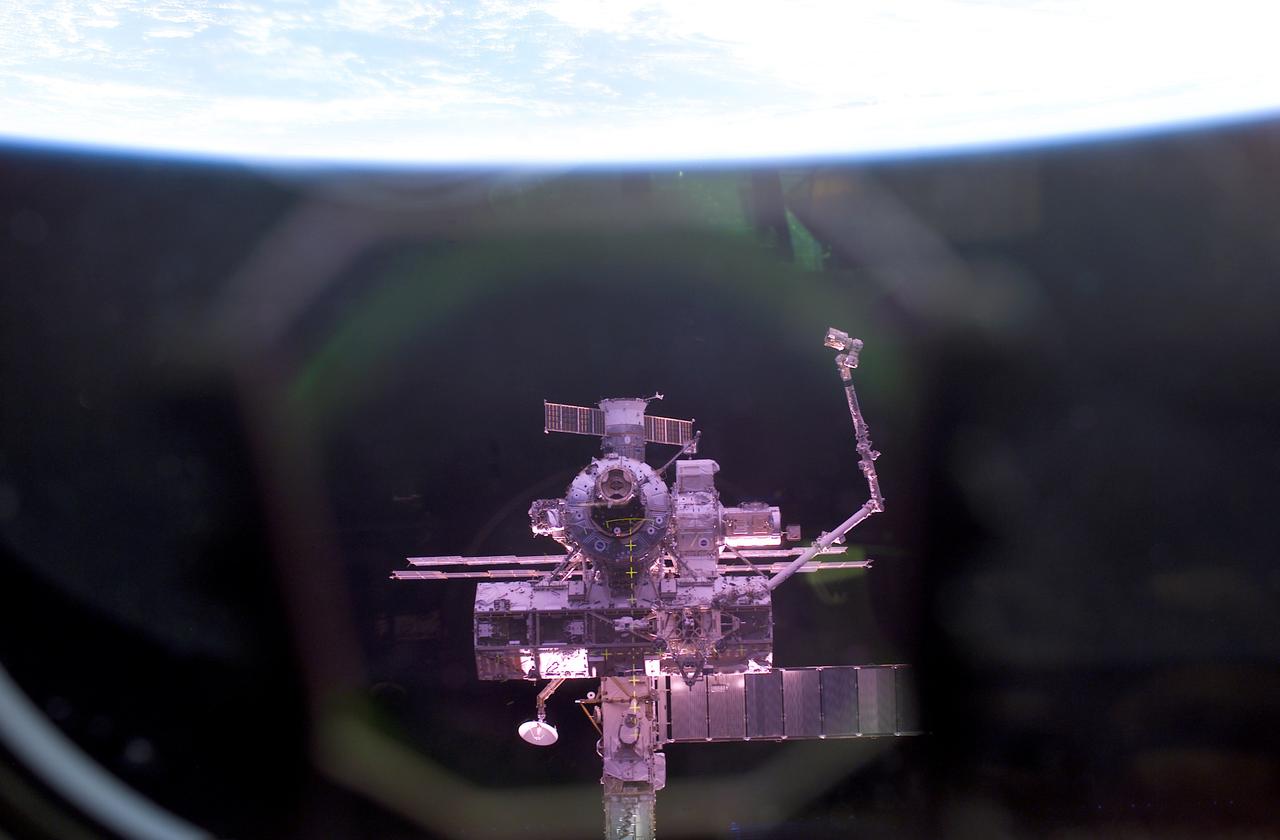
This view of the International Space Station (ISS) was photographed by an STS-112 crew member aboard the Space Shuttle Atlantis during rendezvous and docking operations. Launched October 7, 2002 aboard the Space Shuttle Orbiter Atlantis, the STS-112 mission lasted 11 days and performed three sessions of Extra Vehicular Activity (EVA). Its primary mission was to install the Starboard (S1) Integrated Truss Structure and Equipment Translation Aid (CETA) Cart to the ISS. The S1 truss provides structural support for the orbiting research facility's radiator panels, which use ammonia to cool the Station's complex power system. The S1 truss, attached to the S0 (S Zero) truss, installed by the previous STS-110 mission, flows 637 pounds of anhydrous ammonia through three heat rejection radiators. The truss is 45-feet long, 15-feet wide, 10-feet tall, and weighs approximately 32,000 pounds. The CETA is the first of two human-powered carts that will ride along the railway on the ISS providing a mobile work platform for future extravehicular activities by astronauts.

These 5 astronauts and cosmonaut, all members of the STS-112 mission, pose for a crew portrait. Pictured from left to right are: Astronauts Sandra H. Magnus, mission specialist; David A. Wolf, mission specialist; Pamela A. Melroy, pilot; Jeffrey S. Ashby, commander; Piers J. Sellers, mission specialist; and cosmonaut Fyodor Yurchikhin, mission specialist representing Rosaviakosmos. STS-112 launched aboard the Space Shuttle Atlantis October 7, 2002 for an 11-day mission completing three sessions of Extra Vehicular Activity(EVA). Its primary mission was to install the Starboard (S1) Integrated Truss Structure and Equipment Translation Aid (CETA) Cart to the ISS. The S1 truss provides structural support for the orbiting research facility's radiator panels, which use ammonia to cool the Station's complex power system. The S1 truss, attached to the S0 (S Zero) truss installed by the previous STS-110 mission, flows 637 pounds of anhydrous ammonia through three heat rejection radiators. The truss is 45-feet long, 15-feet wide, 10-feet tall, and weighs approximately 32,000 pounds. The CETA is the first of two human-powered carts that will ride along the railway on the ISS providing a mobile work platform for future extravehicular activities by astronauts.
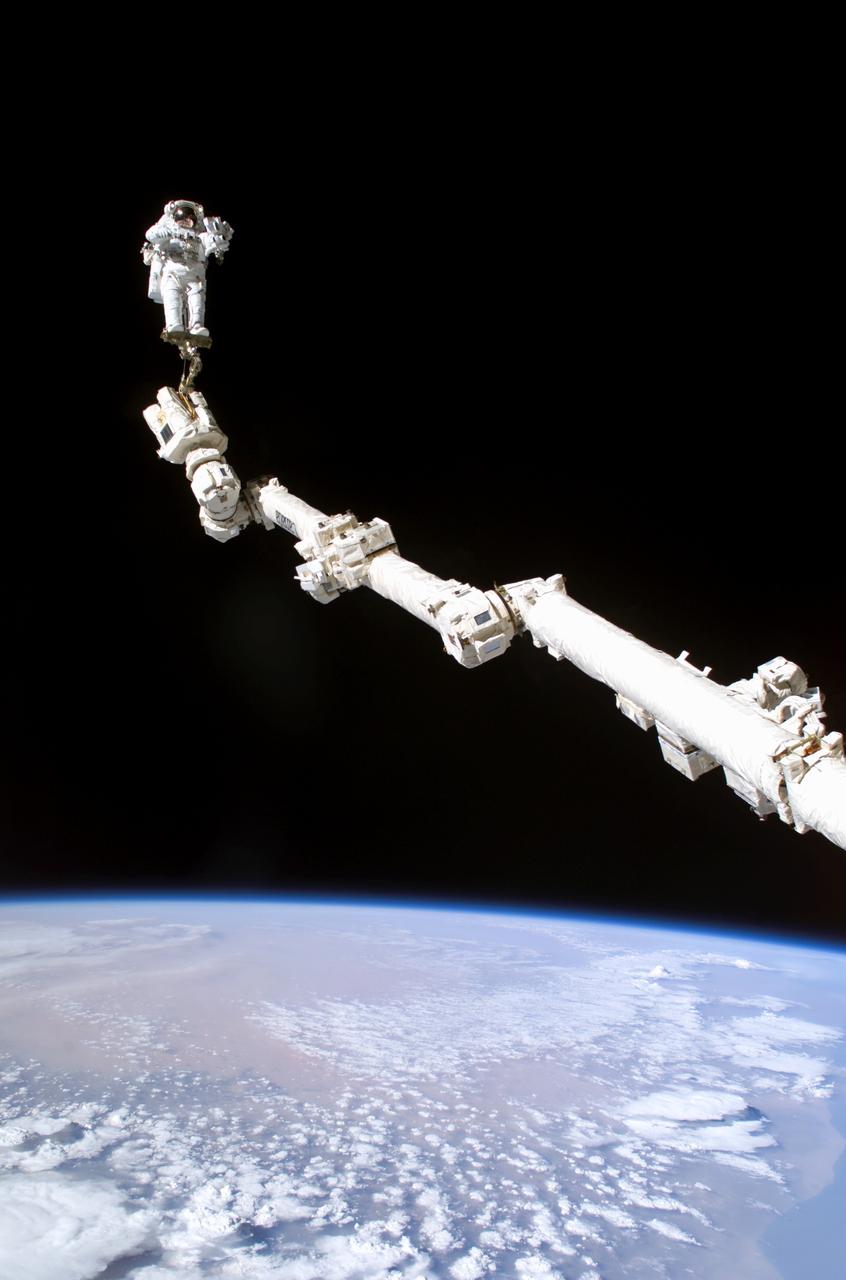
Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. Back dropped by the blackness of space and Earth’s horizon, astronaut Stephen K. Robinson, STS-114 mission specialist, is anchored to a foot restraint on the extended ISS’s Canadarm-2.
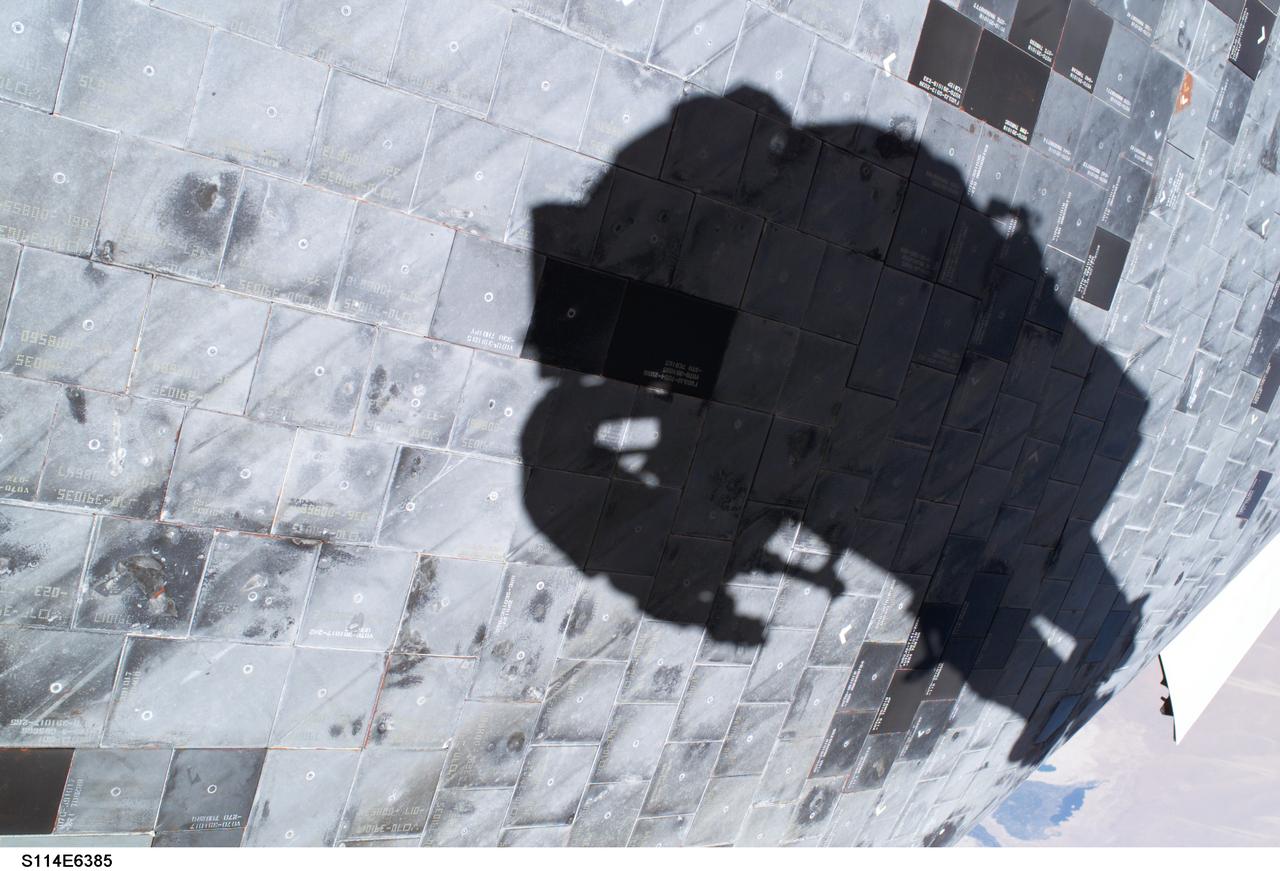
Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. This particular photo was taken by astronaut Stephen K. Robinson, STS-114 mission specialist, whose shadow is visible on the thermal protection tiles.

Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. Astronaut Stephen K. Robinson, STS-114 mission specialist, used the pictured still digital camera to expose a photo of his helmet visor during the EVA. Also visible in the reflection are thermal protection tiles on Discovery’s underside.
CAPE CANAVERAL, Fla. – In the Space Station Processing Facility at NASA's Kennedy Space Center, astronaut Charles Hobaugh, right, conducts a fit check of the robotic workstation, or RWS, in the International Space Station's Cupola module. He is assisted by vehicle integration test engineer Louise Kleba of Flight Crew Operations, kneeling, Boeing technician Terry Camarata, standing at left, and engineer David Jackson, from Johnson Space Center. The RWS is provided by the Canadian Space Agency. The module was delivered by the European Space Agency in 2004 to Kennedy from Alenia Spazio in Turin, Italy. Cupola will provide unprecedented views of activities outside the station and spectacular views of the Earth. Crew members working inside the module will have a 360-degree panoramic view. Cupola has the capability for command and control workstations to be installed to assist in space station remote manipulator system and extra vehicular activities. Cupola is the final element of the space station core and is scheduled for launch on space shuttle Endeavour's STS-130 mission, targeted for Dec. 10, 2009. Photo credit: NASA/Cory Huston

Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. This particular photo was taken by astronaut Stephen K. Robinson, STS-114 mission specialist, whose shadow is visible on the thermal protection tiles, and a portion of the Canadian built Remote Manipulator System (RMS) robotic arm and the Nile River is visible at the bottom.

Launched October 7, 2002 aboard the Space Shuttle Orbiter Atlantis, the STS-112 mission lasted 11 days and performed three sessions of Extra Vehicular Activity (EVA). Its primary mission was to install the Starboard Side Integrated Truss Structure (S1) and Equipment Translation Aid (CETA) Cart to the International Space Station (ISS). The S1 truss provides structural support for the orbiting research facility's radiator panels, which use ammonia to cool the Station's complex power system. The S1 truss, attached to the S0 (S Zero) truss installed by the previous STS-110 mission, flows 637 pounds of anhydrous ammonia through three heat rejection radiators. The truss is 45-feet long, 15-feet wide, 10-feet tall, and weighs approximately 32,000 pounds. The CETA is the first of two human-powered carts that will ride along the International Space Station's railway providing a mobile work platform for future extravehicular activities by astronauts. In this photograph, Astronaut Piers J. Sellers uses both a handrail on the Destiny Laboratory and a foot restraint on the Space Station Remote Manipulator System or Canadarm2 to remain stationary while performing work at the end of the STS-112 mission's second space walk. A cloud-covered Earth provides the backdrop for the scene.

This is the official NASA portrait of astronaut Edwin E. (Buzz) Aldrin. Prior to joining NASA, Aldrin flew 66 combat missions in F-86s while on duty in Korea. At Nellis Air Force Base, Nevada, he served as an aerial gunnery instructor. Following his assignment as aide to the dean of faculty at the Air Force Academy, Aldrin flew F-100s as a flight commander at Bitburg, Germany. Aldrin was one of the third group of astronauts named by NASA in October 1963 and has logged 289 hours and 53 minutes in space, of which, 7 hours and 52 minutes were spent in Extra Vehicular Activity (EVA). On November 11, 1966, he launched into space aboard the Gemini 12 spacecraft on a 4-day flight, which brought the Gemini program to a successful close. During that mission, Aldrin established a new record for EVA, spending 5-1/2 hours outside the spacecraft. July 16-24, 1969, Aldrin served as lunar module pilot for Apollo 11, the first manned lunar landing mission. Aldrin followed Neil Armstrong onto the lunar surface on July 20, 1969, completing a 2-hour and 15 minute lunar EVA. Aldrin resigned from NASA in July 1971.

JOHNSON SPACE CENTER, Houston - STS131-S-001 - The STS-131_19A crew patch highlights the Space Shuttle in the Rendezvous Pitch Maneuver (RPM). This maneuver is heavily photographed by the International Space Station (ISS) astronauts, and the photos are analyzed back on earth to clear the Space Shuttle's thermal protection system for re-entry. The RPM illustrates the teamwork and safety process behind each Space Shuttle launch. In the Space Shuttle's cargo bay is the Multi-Purpose Logistics Module (MPLM), Leonardo, which is carrying several science racks, the last of the four crew quarters, and supplies for the ISS. Out of view and directly behind the MPLM, is the Ammonia Tank Assembly (ATA) that will be used to replace the current ATA. This will take place during three Extra Vehicular Activities (EVAs). The 51.6° Space Shuttle orbit is illustrated by the three gold bars of the astronaut symbol, and its elliptical wreath contains the orbit of the ISS. The star atop the astronaut symbol is the dawning sun, which is spreading its early light across the Earth. The background star field contains seven stars, one for each crewmember; they are proud to represent the United States and Japan during this mission. The NASA insignia design for shuttle flights is reserved for use by the astronauts and for other official use as the NASA Administrator may authorize. Public availability has been approved only in the form of illustrations by the various news media. When and if there is any change in this policy, which we do not anticipate, it will be publicly announced.

This is the official NASA portrait of astronaut Michael Collins. Collins chose an Air Force career following graduation from West Point. He served as an experimental flight test officer at the Air Force Flight Test Center, Edwards Air Force Base, California, and, in that capacity, tested performance and stability and control characteristics of Air Force aircraft, primarily jet fighters. Having logged approximately 5,000 hours flying time, Collins was one of the third group of astronauts named by NASA in October 1963. Collins completed two space flights, logging 266 hours in space, of which, 1 hour and 27 minutes was spent in Extra Vehicular Activity (EVA). On July 18, 1966, he served as backup pilot for the Gemini VII mission which included a successful rendezvous and docking with a separately launched Agena target vehicle and, using the power of the Agena, maneuvered the Gemini spacecraft into another orbit for a rendezvous with a second, passive Agena. His skillful performance in completing two periods of EVA included the recovery of a micrometeorite detection experiment from the passive Agena. July 16-24, 1969, Collins served as command module (CM) pilot on Apollo 11, the historic first lunar landing mission. He remained aboard the CM, Columbia, on station in lunar orbit and performed the final re-docking maneuvers following a successful lunar orbit rendezvous with the Lunar Module (LM), Eagle. Collins left NASA in January 1970.
![Test subject wearing jet-shoe apparatus and resting in sling support. The cables are not attached. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966. "As mentioned previously, Langley is conducting in-house and contract studies of extra-vehicular activities wherein zero gravity is simulated by the water-immersion technique. ... Water immersion is a very useful technique where motions are slow. When more rapid motion is required, as in studying one-man propulsion systems, other approaches are required. For these studies Langley has been using the RDS [Rendezvous Docking Simulator] in a manner similar to the LLRF [Lunar Landing Research Facility] technique. The test subjects are suspended in a sling support from a single RDS cable. As they translate about, the RDS tracks them, keeping the cable vertical. The test subjects operate in an effectively zero g environment in the horizontal plane. Tracking was originally done visually using closed-circuit TV, but recently a fast-response servo system using cable angle sensors has provided better operation. Some results of tests where subjects moved about merely by jumping and also where propulsion in the form of simple "jet-shoes" was provided are given in reference 20. Both methods, within limits, appear feasible. Full six-degree-of-freedom equipment for studies of more sophisticated one-man propulsion systems is now being procured. Called OMPRA (One-Man Propulsion Research Apparatus), the device will provide a gimbal system for rotational freedom, a quick response vertical servo for this translational freedom that is not now feasible with the RDS, and a versatile maneuvering unit."](https://images-assets.nasa.gov/image/LRC-1967-B701_P-01373/LRC-1967-B701_P-01373~medium.jpg)
Test subject wearing jet-shoe apparatus and resting in sling support. The cables are not attached. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966. "As mentioned previously, Langley is conducting in-house and contract studies of extra-vehicular activities wherein zero gravity is simulated by the water-immersion technique. ... Water immersion is a very useful technique where motions are slow. When more rapid motion is required, as in studying one-man propulsion systems, other approaches are required. For these studies Langley has been using the RDS [Rendezvous Docking Simulator] in a manner similar to the LLRF [Lunar Landing Research Facility] technique. The test subjects are suspended in a sling support from a single RDS cable. As they translate about, the RDS tracks them, keeping the cable vertical. The test subjects operate in an effectively zero g environment in the horizontal plane. Tracking was originally done visually using closed-circuit TV, but recently a fast-response servo system using cable angle sensors has provided better operation. Some results of tests where subjects moved about merely by jumping and also where propulsion in the form of simple "jet-shoes" was provided are given in reference 20. Both methods, within limits, appear feasible. Full six-degree-of-freedom equipment for studies of more sophisticated one-man propulsion systems is now being procured. Called OMPRA (One-Man Propulsion Research Apparatus), the device will provide a gimbal system for rotational freedom, a quick response vertical servo for this translational freedom that is not now feasible with the RDS, and a versatile maneuvering unit."

The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot; and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valery G. Korzun, commander; and Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks. In this photograph, Astronaut Franklin R. Chang-Diaz participates in the first scheduled session of extra vehicular activity (EVA) for the STS-111 mission. During the space walk, Chang-Diaz and Perrin attached a Power and Data Grapple Fixture onto the ISS's P6 Truss, setting the stage for the future relocation of the P6. The next major task was to remove Service Module Debris Panels from Space Shuttle Endeavour's payload bay and attach them to their temporary location on Pressurized Mating Adapter 1 (PMA-1). The space walkers also removed thermal blankets to prepare the MBS for installation onto the station's Mobile Transporter (MT).
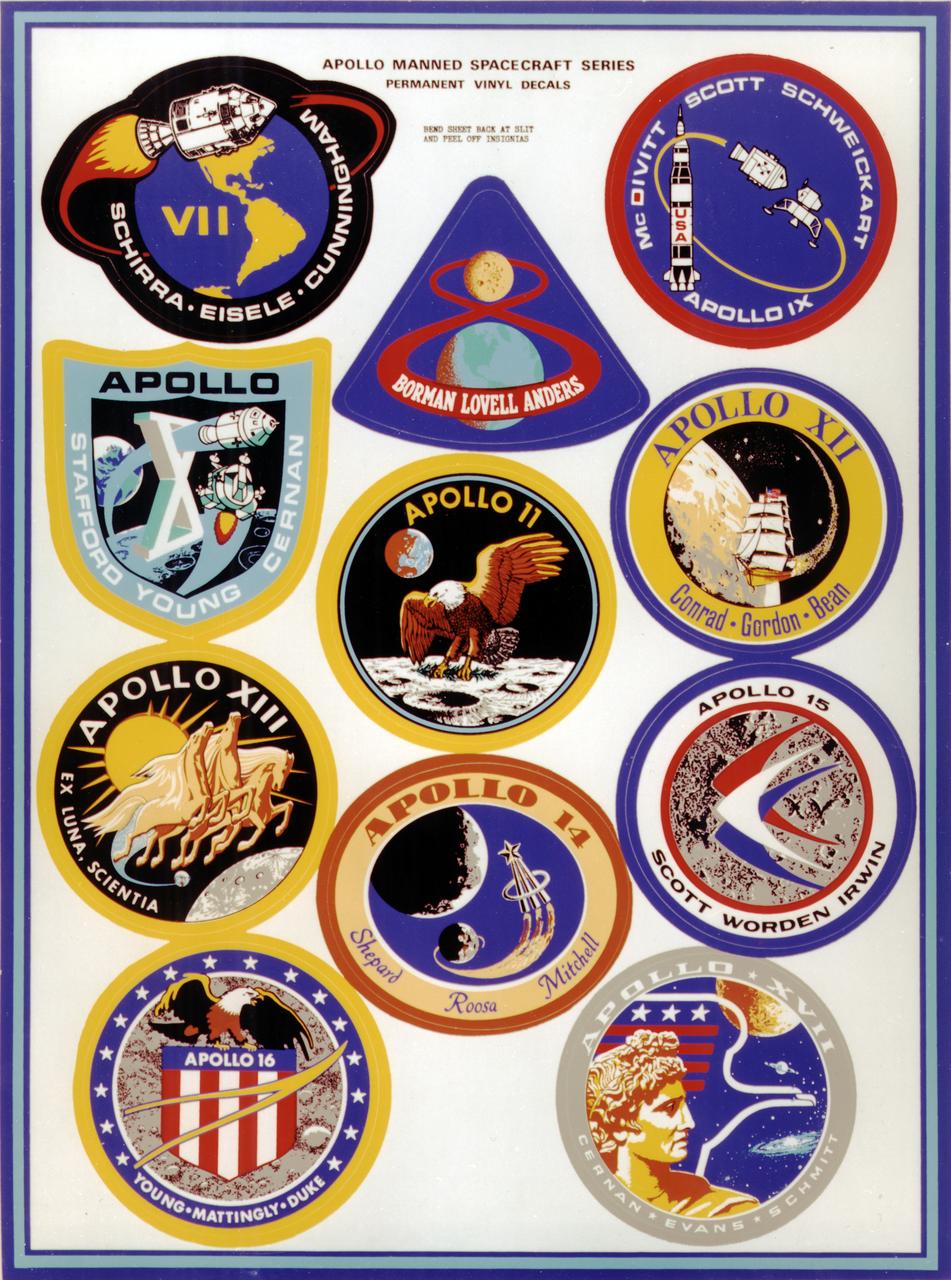
This montage depicts the flight crew patches for the manned Apollo 7 thru Apollo 17 missions. The Apollo 7 through 10 missions were basically manned test flights that paved the way for lunar landing missions. Primary objectives met included the demonstration of the Command Service Module (CSM) crew performance; crew/space vehicle/mission support facilities performance and testing during a manned CSM mission; CSM rendezvous capability; translunar injection demonstration; the first manned Apollo docking, the first Apollo Extra Vehicular Activity (EVA), performance of the first manned flight of the lunar module (LM); the CSM-LM docking in translunar trajectory, LM undocking in lunar orbit, LM staging in lunar orbit, and manned LM-CSM docking in lunar orbit. Apollo 11 through 17 were lunar landing missions with the exception of Apollo 13 which was forced to circle the moon without landing due to an onboard explosion. The craft was,however, able to return to Earth safely. Apollo 11 was the first manned lunar landing mission and performed the first lunar surface EVA. Landing site was the Sea of Tranquility. A message for mankind was delivered, the U.S. flag was planted, experiments were set up and 47 pounds of lunar surface material was collected for analysis back on Earth. Apollo 12, the 2nd manned lunar landing mission landed in the Ocean of Storms and retrieved parts of the unmanned Surveyor 3, which had landed on the Moon in April 1967. The Apollo Lunar Surface Experiments Package (ALSEP) was deployed, and 75 pounds of lunar material was gathered. Apollo 14, the 3rd lunar landing mission landed in Fra Mauro. ALSEP and other instruments were deployed, and 94 pounds of lunar materials were gathered, using a hand cart for first time to transport rocks. Apollo 15, the 4th lunar landing mission landed in the Hadley-Apennine region. With the first use of the Lunar Roving Vehicle (LRV), the crew was bale to gather 169 pounds of lunar material. Apollo 16, the 5th lunar landing mission, landed in the Descartes Highlands for the first study of highlands area. Selected surface experiments were deployed, the ultraviolet camera/spectrograph was used for first time on the Moon, and the LRV was used for second time for a collection of 213 pounds of lunar material. The Apollo program came to a close with Apollo 17, the 6th and final manned lunar landing mission that landed in the Taurus-Littrow highlands and valley area. This mission hosted the first scientist-astronaut, Schmitt, to land on the Moon. The 6th automated research station was set up, and 243 ponds of lunar material was gathered using the LRV.