
Nathan Gelino, a principal investigator with the Exploration Research and Technology programs at Kennedy Space Center in Florida, prepares a vacuum chamber for testing 3D printing inside the Granular Mechanics and Regolith Operations (GMRO) lab at Kennedy’s Swamp Works on April 5, 2022. The testing is part of the Relevant Environment Additive Construction Technology (REACT) project, which derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
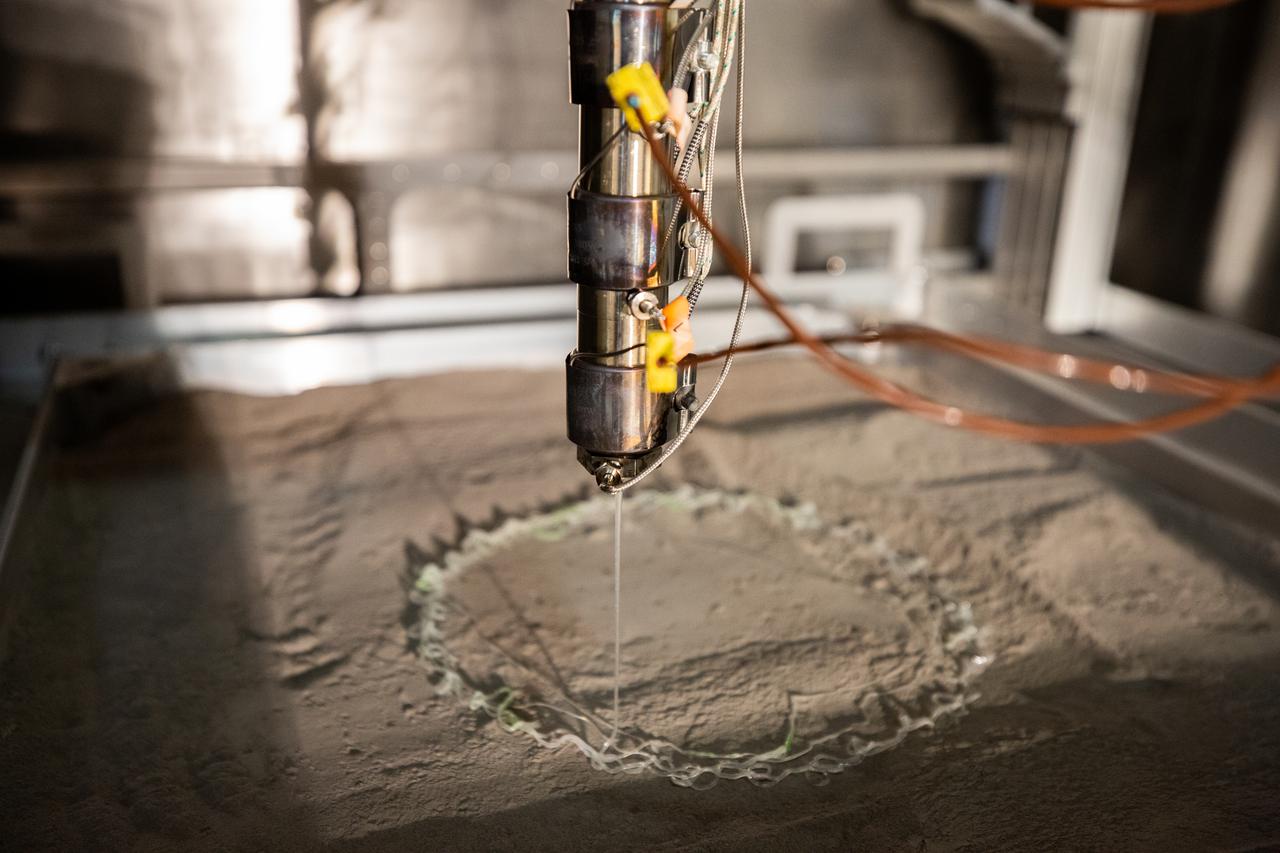
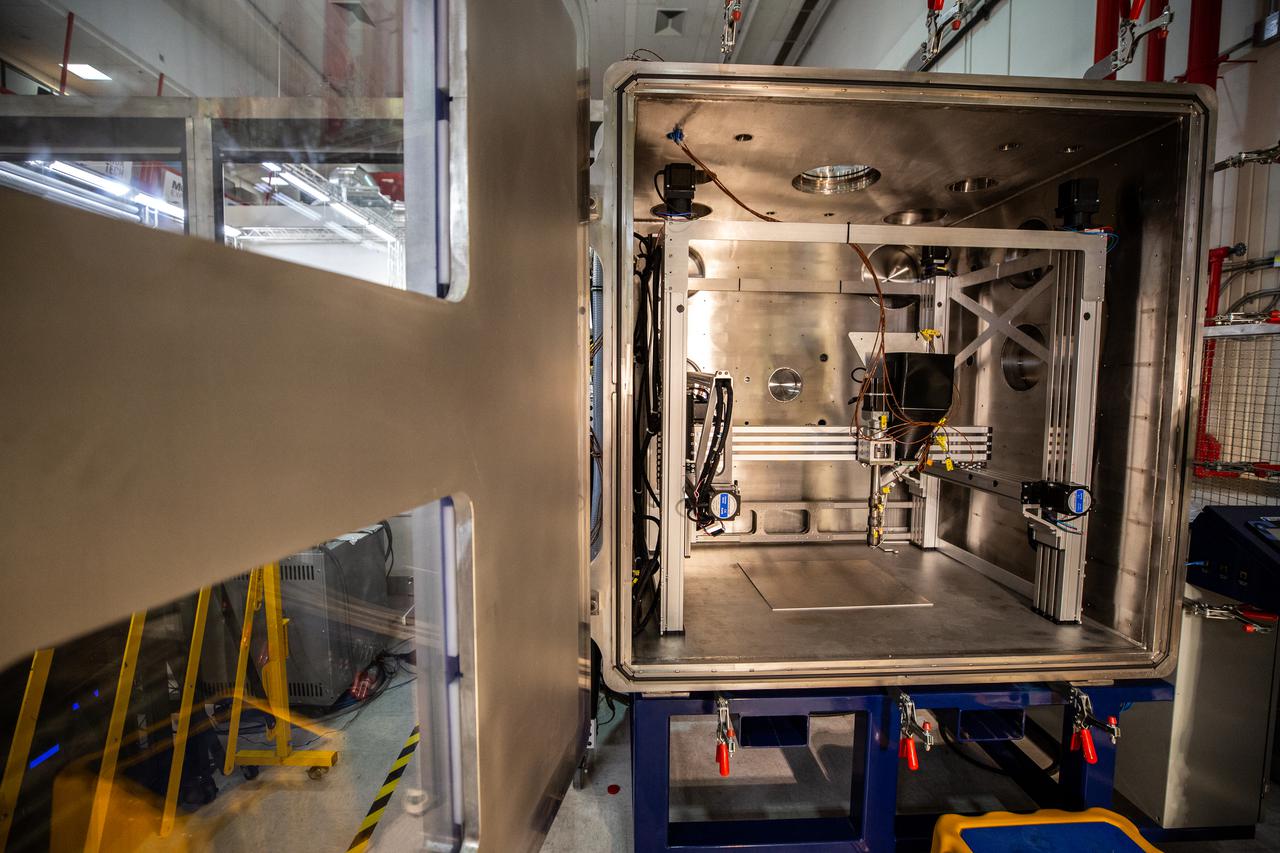
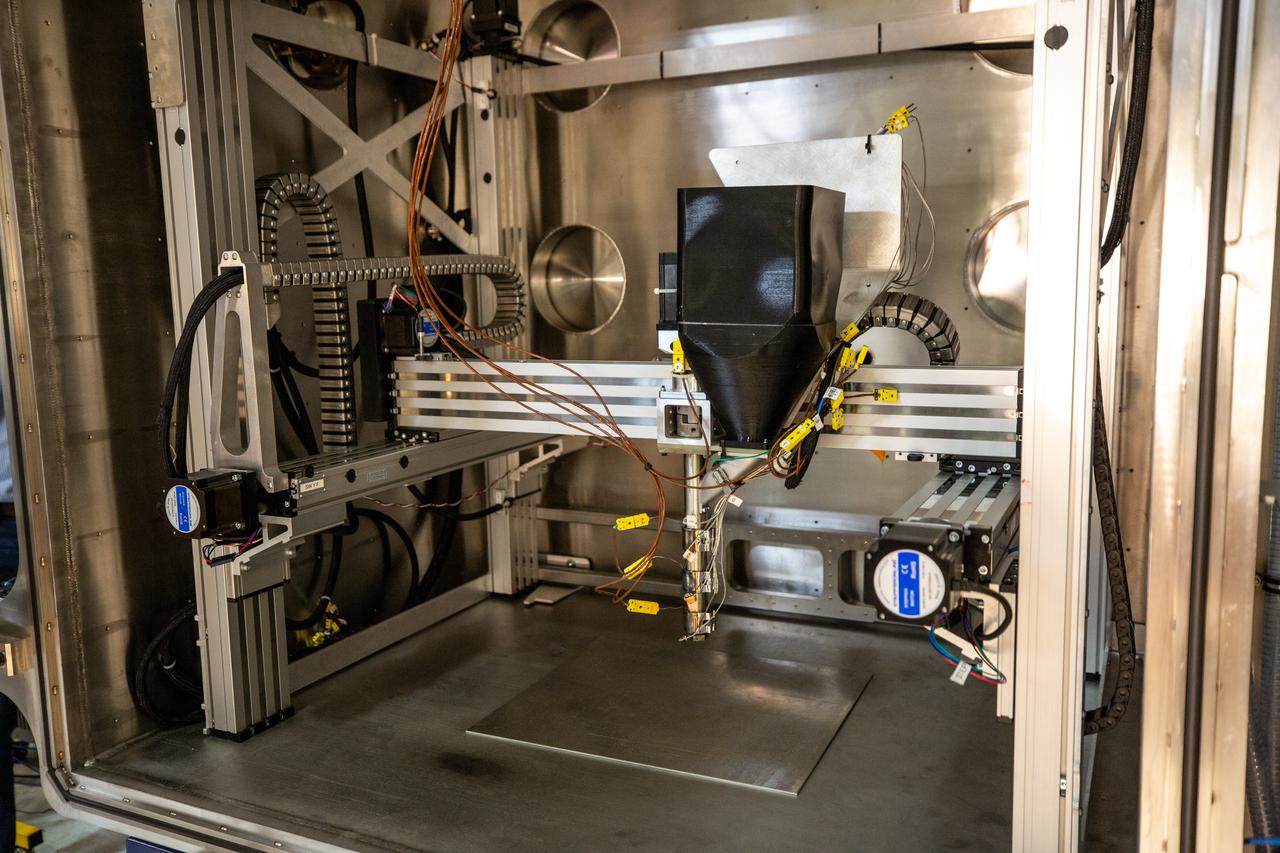
A team at NASA’s Kennedy Space Center in Florida test a 3D printer inside a vacuum chamber at the Granular Mechanics and Regolith Operations (GMRO) lab inside the spaceport’s Swamp Works, as part of the Relevant Environment Additive Construction Technology (REACT) project on April 5, 2022. Testing REACT derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
A team of engineers and researchers prepares a vacuum chamber in the Granular Mechanics and Regolith Operations (GMRO) lab inside NASA Kennedy Space Center’s Swamp Works for testing 3D printing, as part of the Relevant Environment Additive Construction Technology (REACT) project at the Florida spaceport on April 5, 2022. The project derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
A team of engineers and researchers prepares a vacuum chamber in the Granular Mechanics and Regolith Operations (GMRO) lab inside NASA Kennedy Space Center’s Swamp Works for testing 3D printing, as part of the Relevant Environment Additive Construction Technology (REACT) project at the Florida spaceport on April 5, 2022. The project derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.

Joseliz Perez, a NASA intern at Kennedy Space Center in Florida, prepares a vacuum chamber for testing 3D printing inside the Granular Mechanics and Regolith Operations (GMRO) lab at the spaceport’s Swamp Works on April 5, 2022. The testing is part of the Relevant Environment Additive Construction Technology (REACT) project, which derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
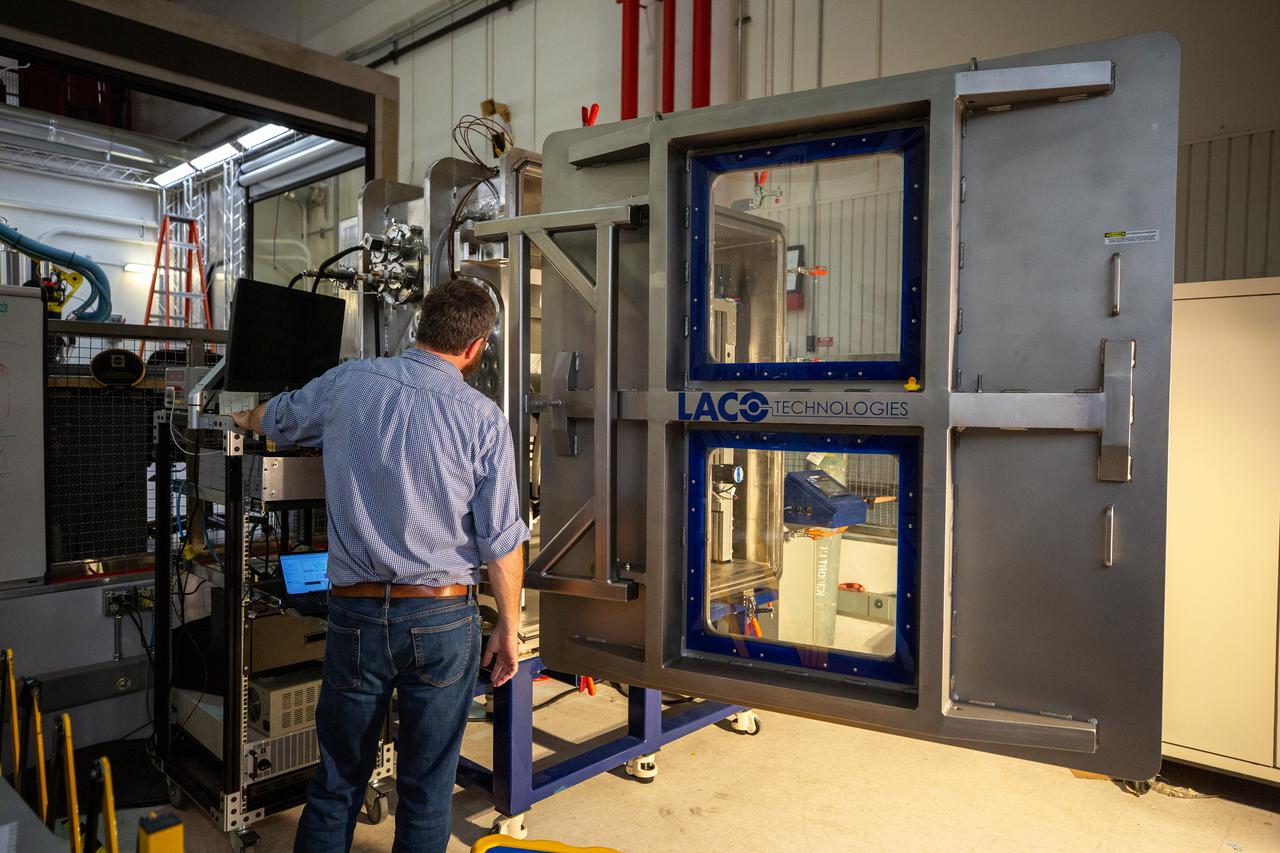
Engineer Matt Nugent prepares a vacuum chamber for testing 3D printing inside the Granular Mechanics and Regolith Operations (GMRO) lab at NASA Kennedy Space Center’s Swamp Works in Florida on April 5, 2022. The testing is part of the Relevant Environment Additive Construction Technology (REACT) project, which derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
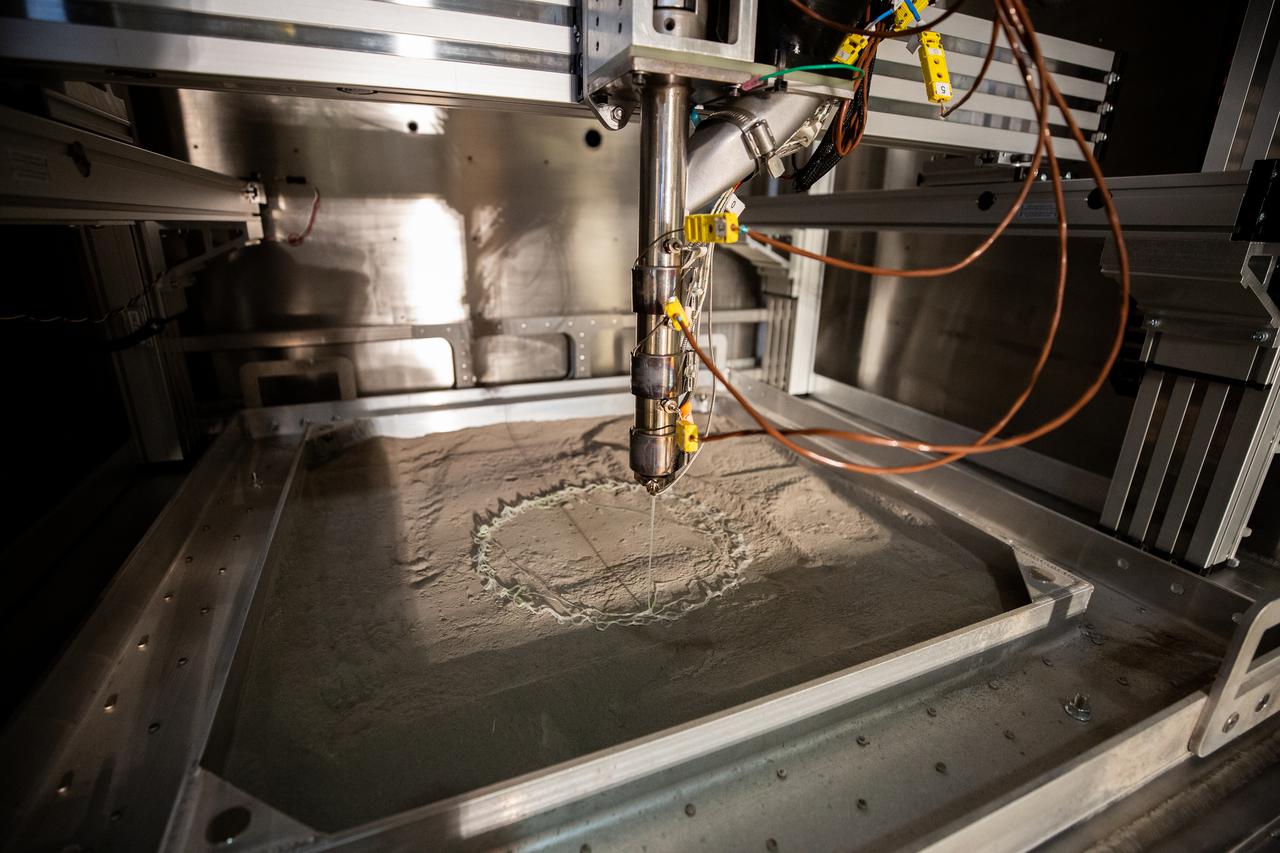
A team at NASA’s Kennedy Space Center in Florida test a 3D printer inside a vacuum chamber at the Granular Mechanics and Regolith Operations (GMRO) lab inside the spaceport’s Swamp Works, as part of the Relevant Environment Additive Construction Technology (REACT) project on April 5, 2022. Testing REACT derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.
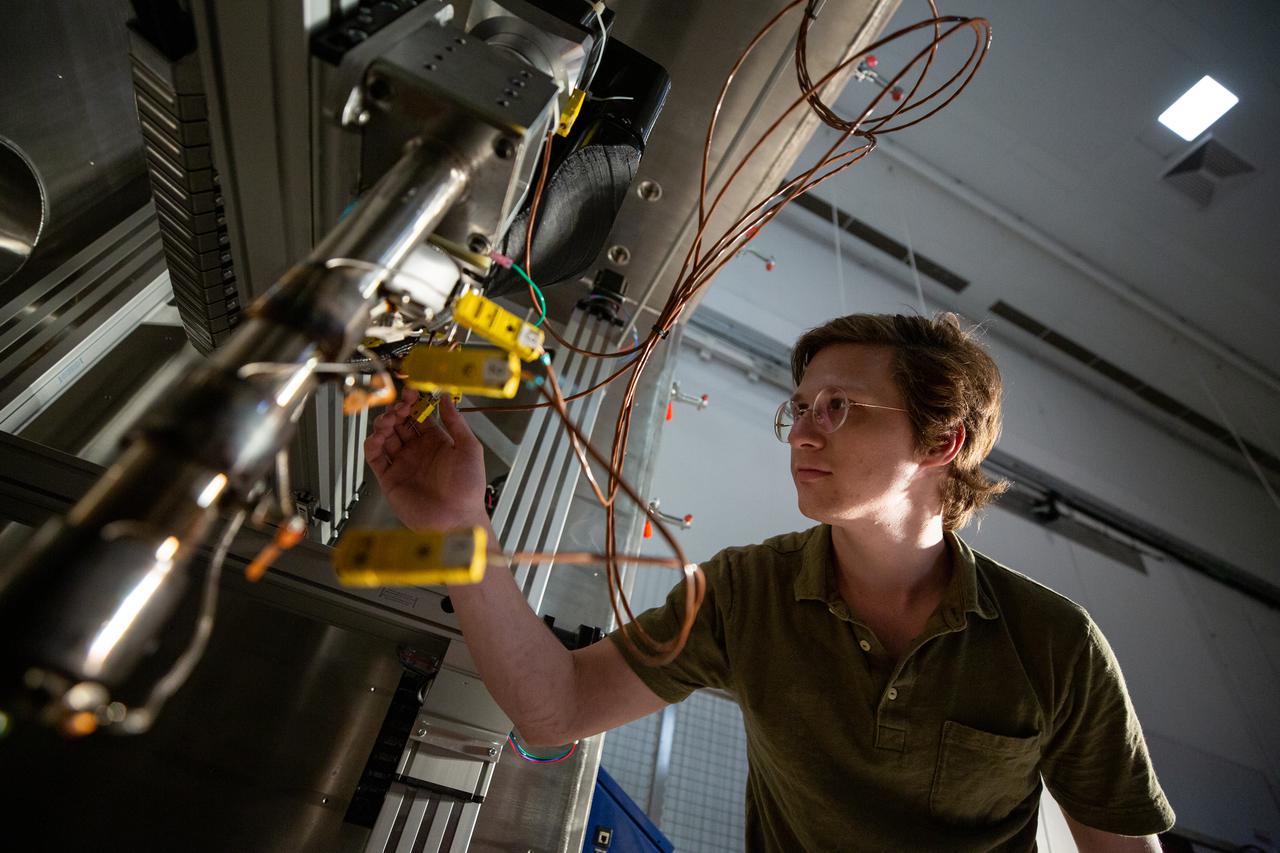
Thomas Lipscomb, a materials engineer at NASA’s Kennedy Space Center in Florida, prepares a vacuum chamber for testing 3D printing inside the Granular Mechanics and Regolith Operations (GMRO) lab at the spaceport’s Swamp Works on April 5, 2022. The testing is part of the Relevant Environment Additive Construction Technology (REACT) project, which derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.

NASA engineer Evan Bell prepares a vacuum chamber for testing 3D printing inside the Granular Mechanics and Regolith Operations (GMRO) lab at Kennedy Space Center’s Swamp Works in Florida on April 5, 2022. The testing is part of the Relevant Environment Additive Construction Technology (REACT) project, which derives from NASA’s 2020 Announcement of Collaboration Opportunity, with AI SpaceFactory – an architectural and construction technology company and winner of NASA’s 3D Printed Habitat Challenge – collaborating with Kennedy teams to build 3D-printed test structures using a composite made from polymers and a regolith simulant in a vacuum chamber that mimics environmental conditions on the Moon.

Drew Smith, a robotics engineer and lab manager with the Exploration Research and Technology programs at NASA's Kennedy Space Center, prepares a Bulk Metallic Glass Gear (BMGG) for ambient temperature tests in a vacuum inside a cryogenic cooler at Kennedy's Granular Mechanics and Regolith Operations lab on June 17, 2021. Made from a custom bulk metallic glass alloy, BMGGs could be used in heater-free gearboxes at extremely low temperatures in locations such as the Moon, Mars, and Europa, one of Jupiter’s moons. NASA’s Jet Propulsion Laboratory is working with commercial partners to create the gears.

Drew Smith, a robotics engineer and lab manager with the Exploration Research and Technology programs at NASA's Kennedy Space Center, prepares a Bulk Metallic Glass Gear (BMGG) for ambient temperature tests in a vacuum inside a cryogenic cooler at Kennedy's Granular Mechanics and Regolith Operations lab on June 17, 2021. Made from a custom bulk metallic glass alloy, BMGGs could be used in heater-free gearboxes at extremely low temperatures in locations such as the Moon, Mars, and Europa, one of Jupiter’s moons. NASA’s Jet Propulsion Laboratory is working with commercial partners to create the gears.

A.J. Nick, left, and Drew Smith, robotics engineers with the Exploration Research and Technology programs at NASA's Kennedy Space Center, test Bulk Metallic Glass Gears (BMGGs) in a vacuum inside a cryogenic cooler at Kennedy's Granular Mechanics and Regolith Operations lab on June 17, 2021. Made from a custom bulk metallic glass alloy, BMGGs could be used in heater-free gearboxes at extremely low temperatures in locations such as the Moon, Mars, and Europa, one of Jupiter’s moons. NASA’s Jet Propulsion Laboratory is working with commercial partners to create the gears.

Ben Burdess, mechanical engineer, observes NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

Astrobotic employees Troy Arbuckle, at left, Planetary Mobility lead mechanical engineer, and Taylor Whitaker, flight software engineer, prepare the Astrobotic CubeRover for its test run in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

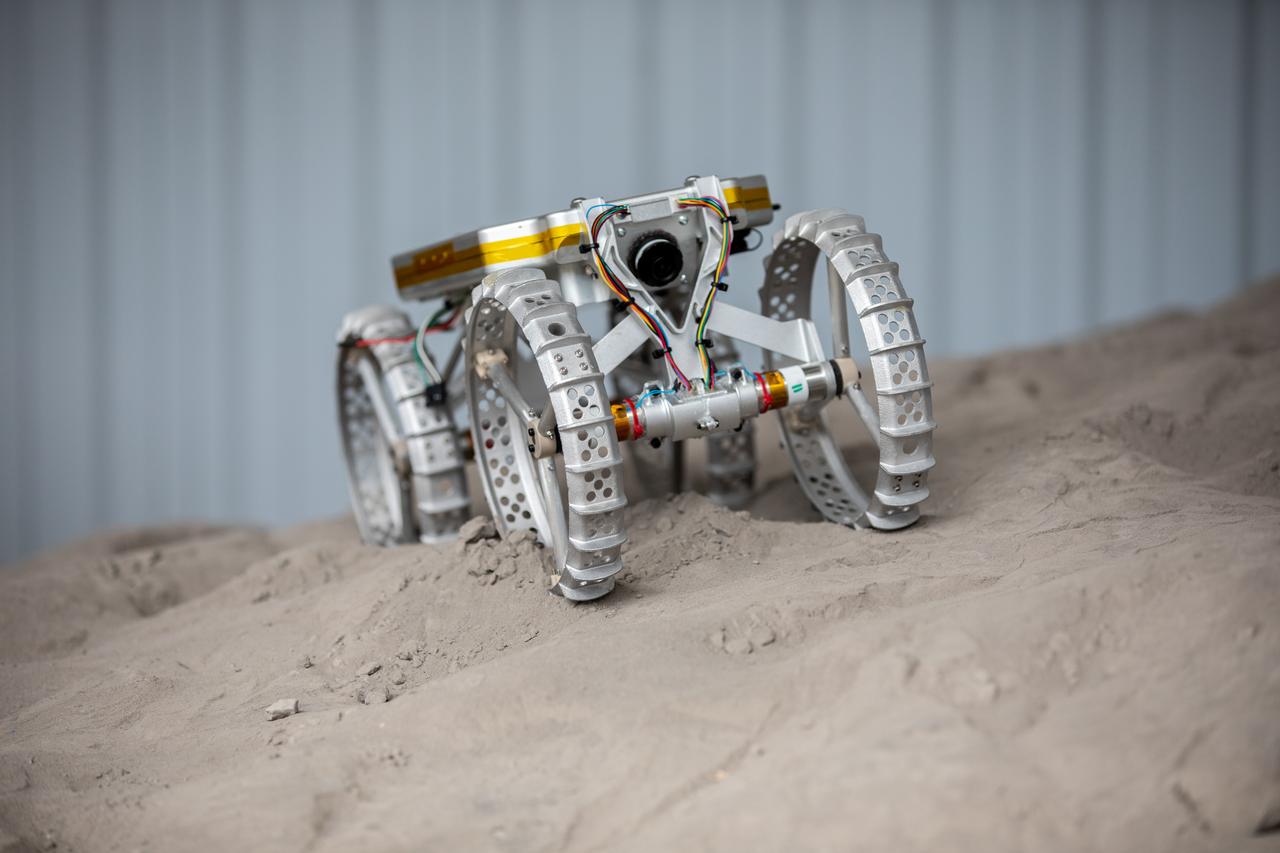
The Astrobotic CubeRover traverses a trench in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

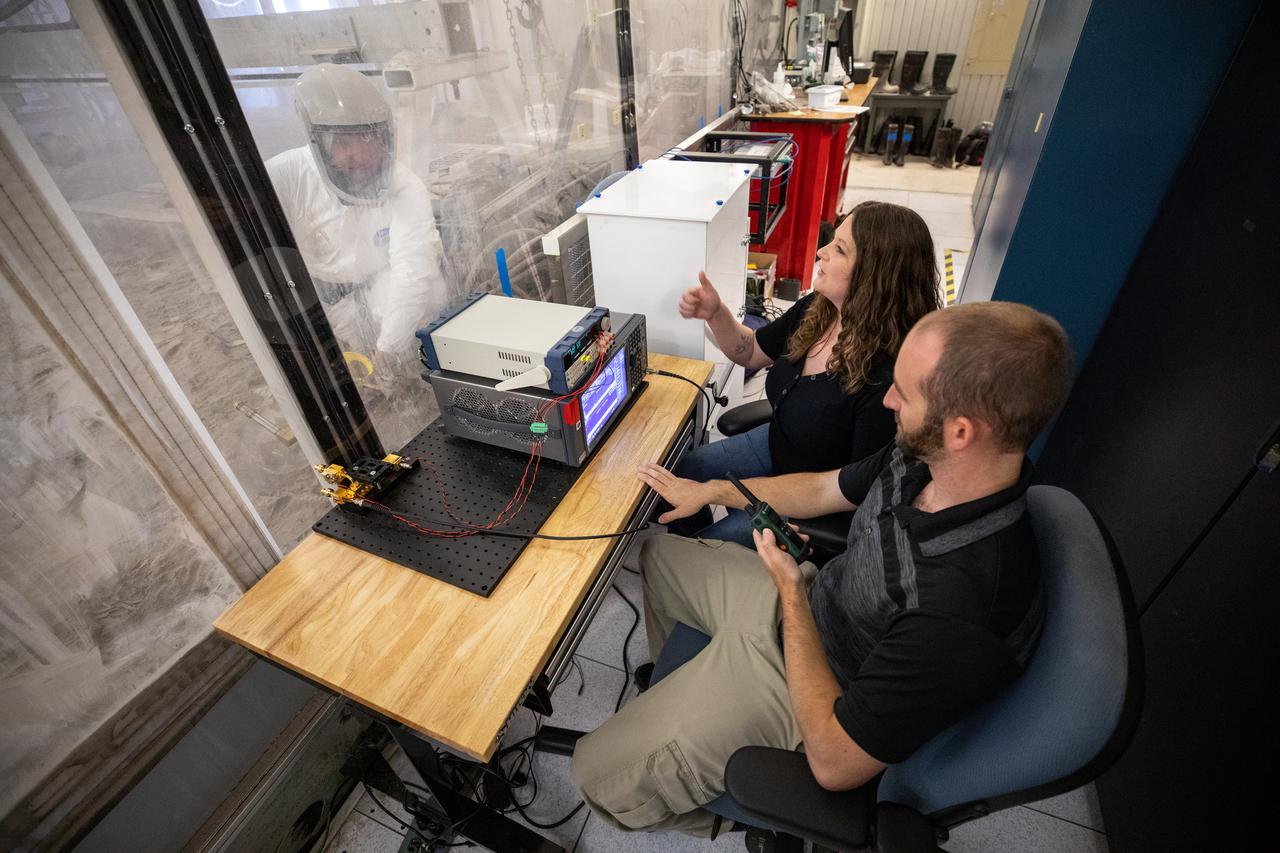
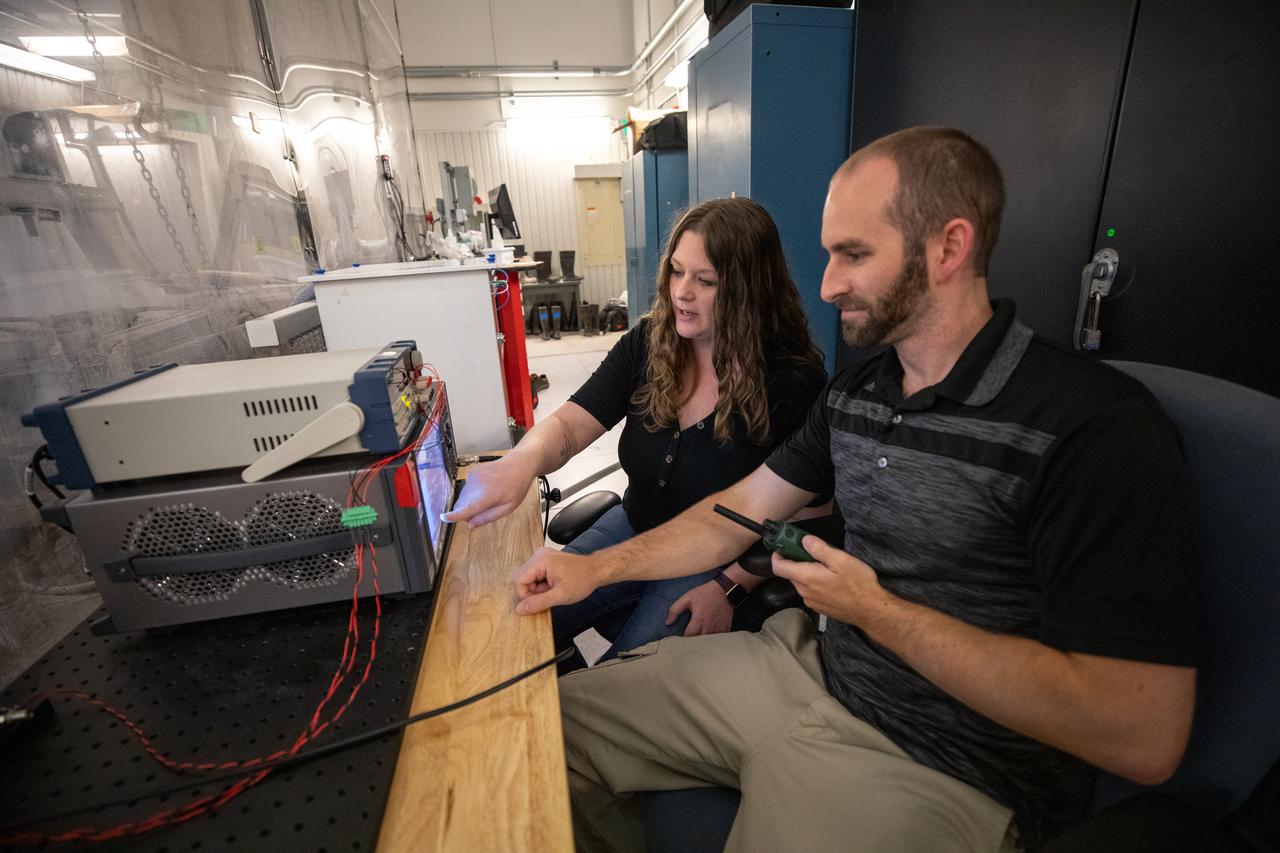
Taylor Whitaker, flight software engineer, monitors the progress of the Astrobotic CubeRover during its test run in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses obstacles in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

The Astrobotic CubeRover traverses obstacles in the Granular Mechanics and Regolith Operations Laboratory regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.
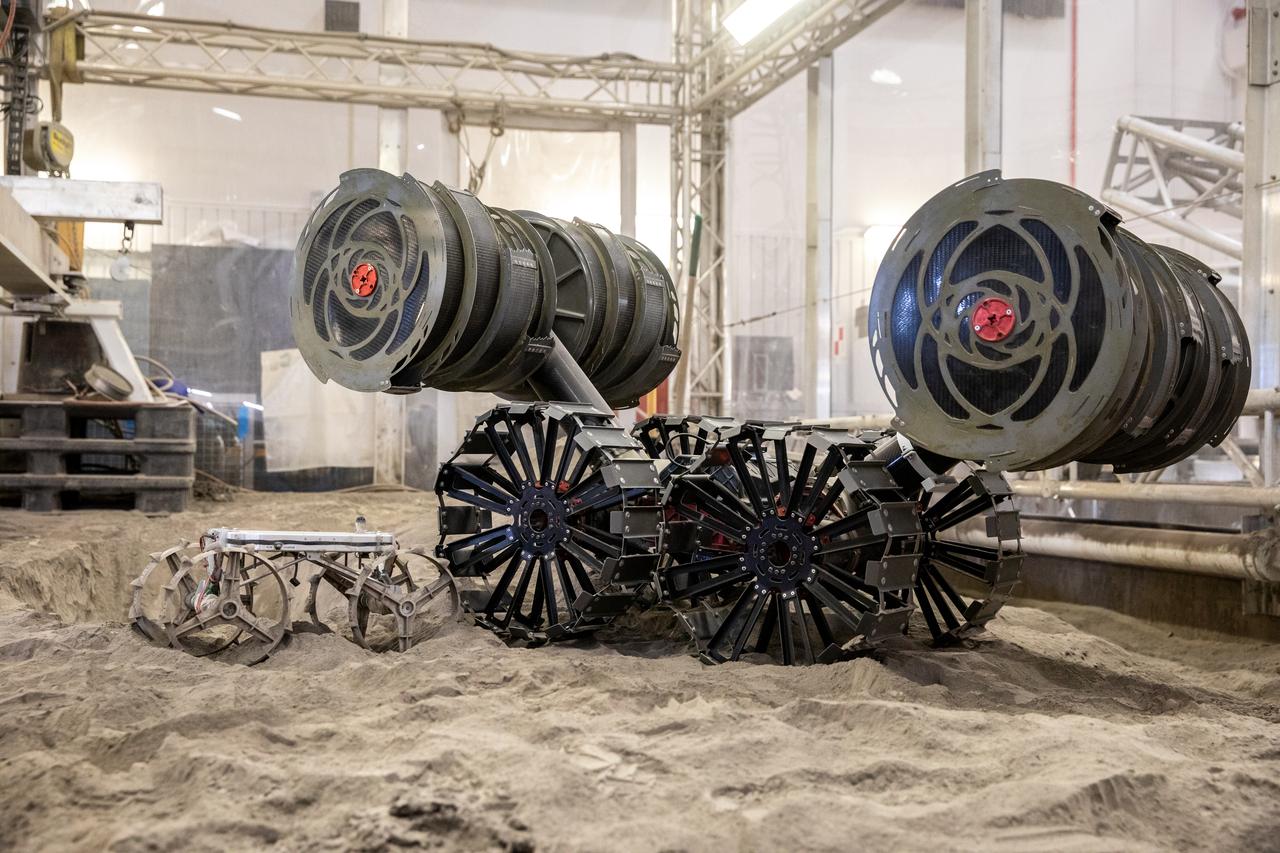
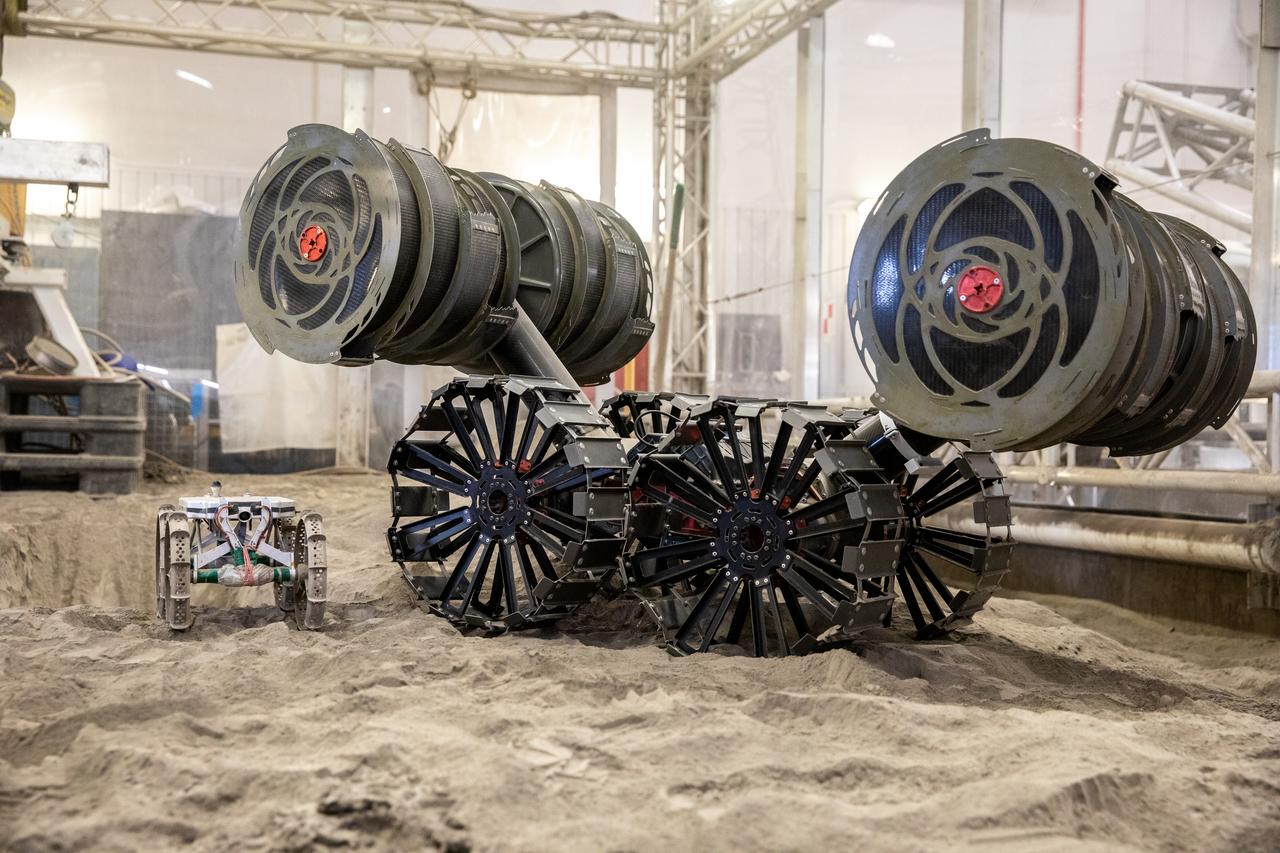
The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.
The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.

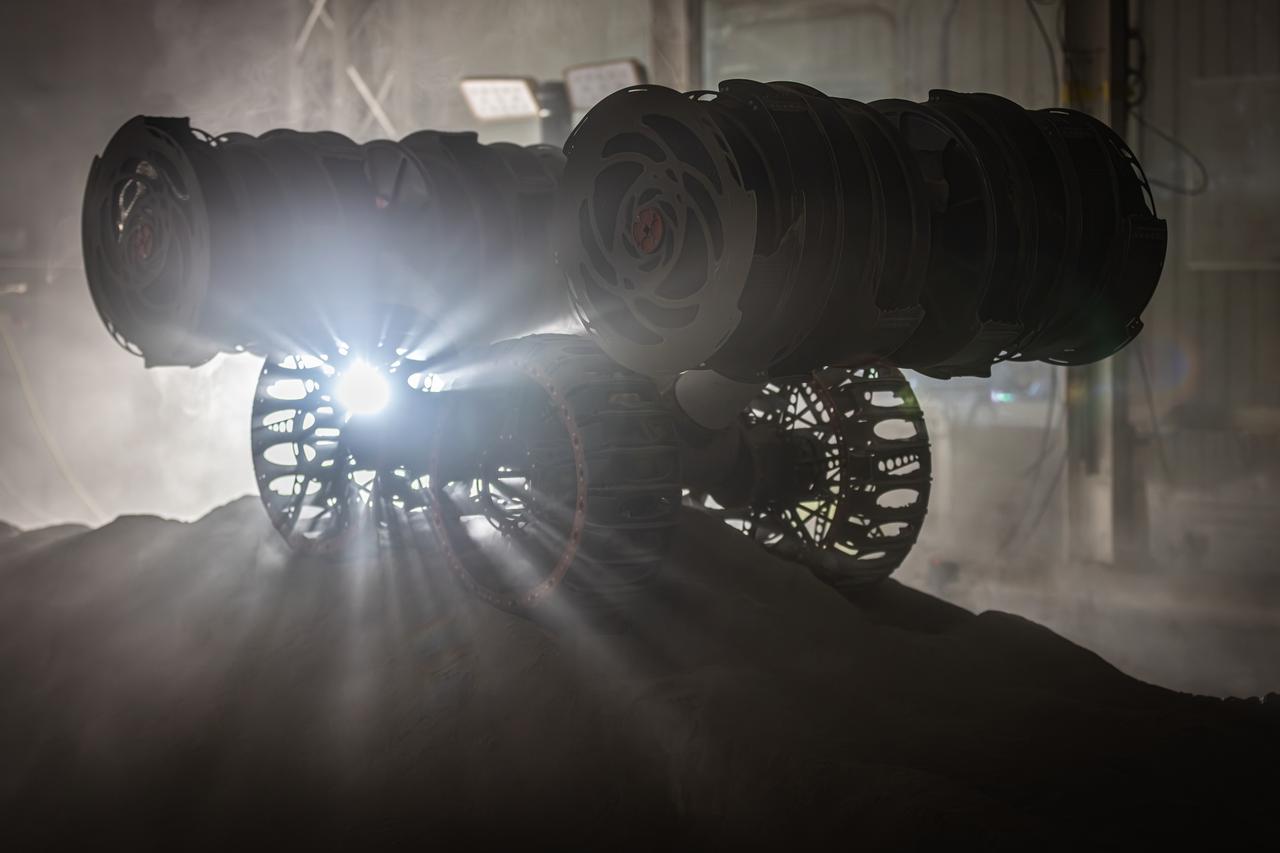
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

Astrobotic employees Troy Arbuckle, at far left, Planetary Mobility lead mechanical engineer; Takuto Oikawa, mechanical engineer; and Taylor Whitaker, flight software engineer, monitor the progress of the Astrobotic CubeRover during its test run in the Granular Mechanics and Regolith Operations Lab regolith at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

Astrobotic employee Troy Arbuckle, at right, Planetary Mobility lead mechanical engineer, and NASA employee A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, observe the Astrobotic CubeRover during its test run in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design.

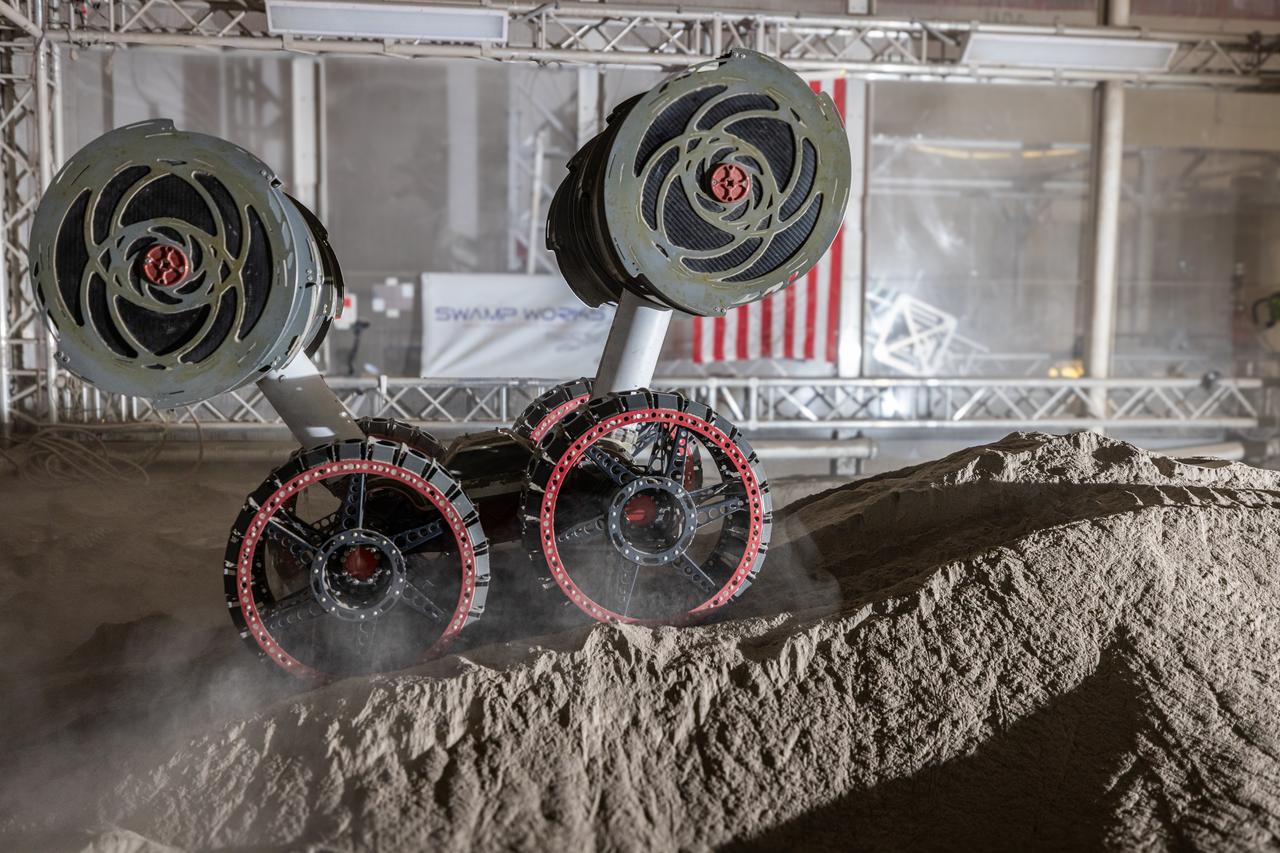
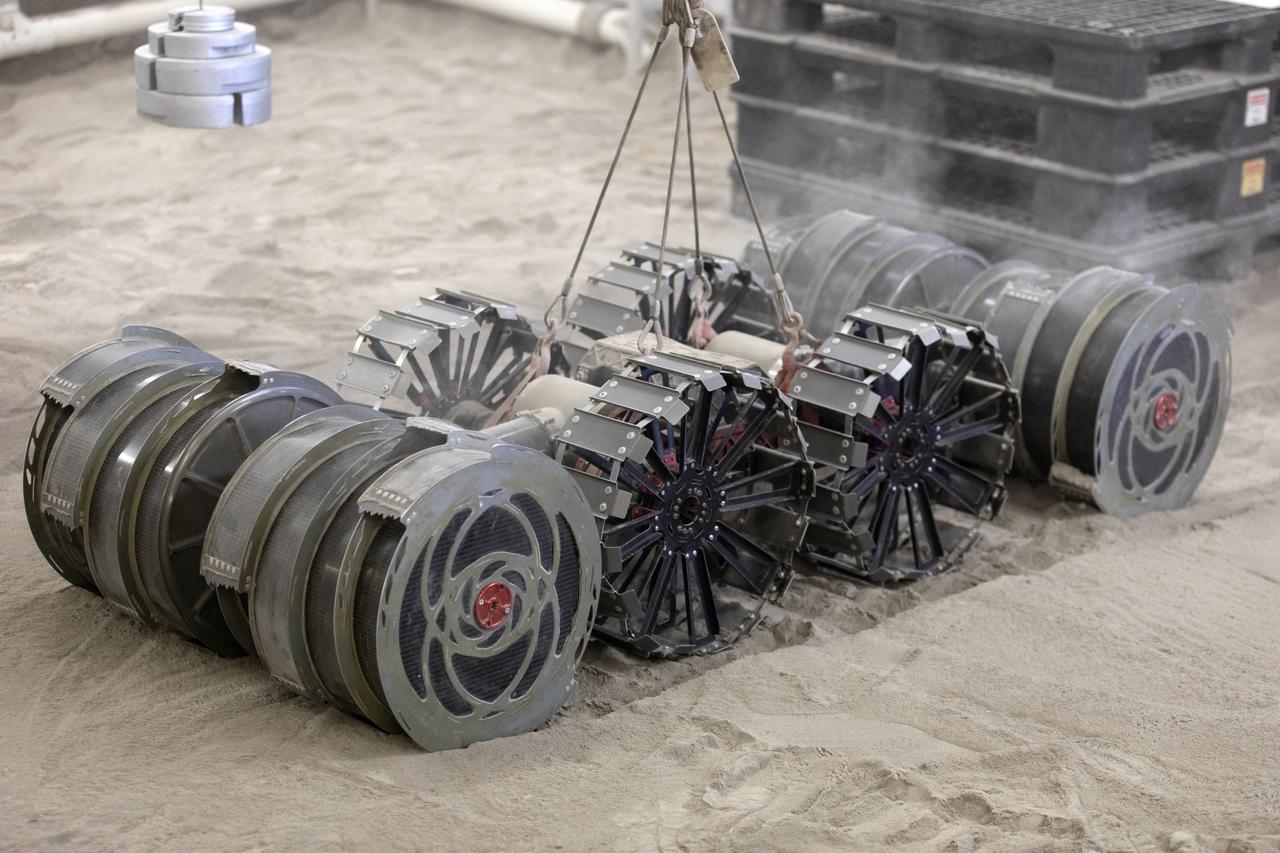
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

AJ Nick, a robotic engineer with the Granular Mechanics and Regolith Operations Lab, monitors the Regolith Advanced Surface Systems Operations Robot (RASSOR) from a control room during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

NASA astronaut Jessica Watkins visits the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronaut Randy Bresnik visits the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronaut Jessica Watkins visits the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronaut Jessica Watkins visits the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronaut Jessica Watkins visits the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

Austin Langton, a researcher at NASA's Kennedy Space Center in Florida, creates a fine spray of the regolith simulant BP-1, to perform testing with a Millimeter Wave Doppler Radar at the Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing occurred inside the "Big Bin," an enclosure at Swamp Works that holds 120 tons of regolith simulant. The testing at the Florida spaceport is part of a project to predict plume surface interaction effects on the Moon, with testing happening at Kennedy, and NASA's Marshal Space Flight Center and Glenn Research Center.

A team from the Granular Mechanics and Regolith Operations Lab operates a test of the ISRU Pilot Excavator in regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations lab who developed and tested NASA’s ISRU Pilot Excavator (IPEx) pose for a photo on Friday, Aug. 30, 2024, in a testbed located at NASA’s Kennedy Space Center in Florida. IPEx functions as both an excavator and a dump truck to mine and transport lunar regolith, the loose rocky material on the Moon’s surface, which is crucial for future lunar missions and In-Situ Resource Utilization (ISRU) processes. This dual capability makes IPEx an indispensable tool for sustainable lunar exploration.

Senior Software Engineer Taylor Whitaker reports the results of a drawbar pull run to Astrobotic staff outside of the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
Astrobotic’s CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

Groups from the Granular Mechanics and Regolith Operations (GMRO) laboratory and the Electrostatics and Surface Physics Laboratory (ESPL) gather for a photograph to celebrate the 10th anniversary of Swamp Works at NASA’s Kennedy Space Center in Florida on Feb. 13, 2023. Studies of the mechanics of materials in a launch pad environment are performed in the GMRO lab. The team also develops technologies for handling lunar and Martian regolith, including excavator technologies, pneumatic transport of soil, and magnetic handling of soil. The ESPL group performs scientific investigations to protect flight hardware and launch equipment from the phenomenon of electrostatic discharges, commonly known as sparks.

Groups from the Granular Mechanics and Regolith Operations (GMRO) laboratory and the Electrostatics and Surface Physics Laboratory (ESPL) gather for a photograph to celebrate the 10th anniversary of Swamp Works at NASA’s Kennedy Space Center in Florida on Feb. 13, 2023. Studies of the mechanics of materials in a launch pad environment are performed in the GMRO lab. The team also develops technologies for handling lunar and Martian regolith, including excavator technologies, pneumatic transport of soil, and magnetic handling of soil. The ESPL group performs scientific investigations to protect flight hardware and launch equipment from the phenomenon of electrostatic discharges, commonly known as sparks.

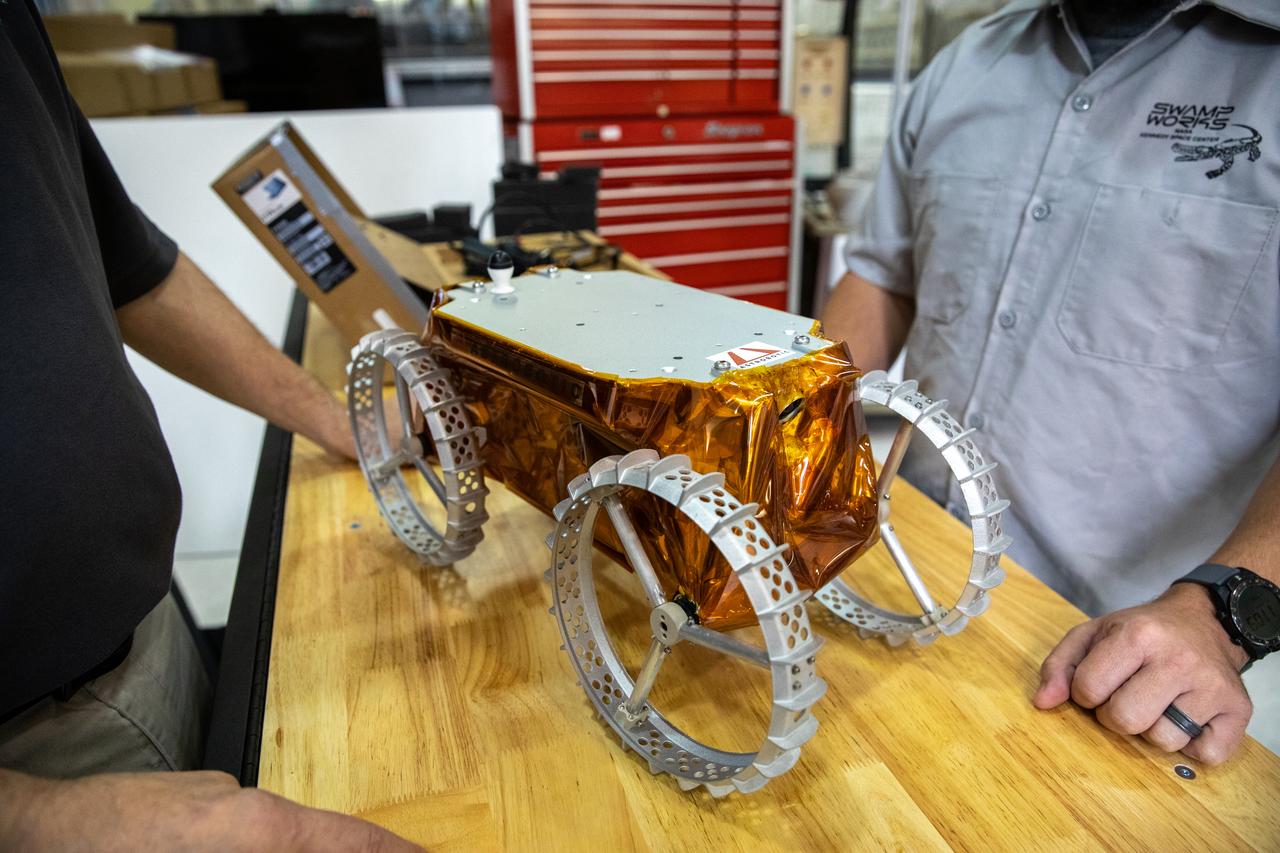
Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unboxes a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

A.J. Nick, left, and Jim Mantovani, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.
Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unboxes a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, left, and A.J. Nick, with Kennedy Space Center’s Exploration and Research and Technology programs, unbox a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

Jim Mantovani, with Kennedy Space Center’s Exploration and Research and Technology programs, unboxes a CubeRover at the Florida spaceport on Oct. 9, 2020. The rover was delivered by Pittsburgh-based space robotics company Astrobotic, as part of a Small Business Innovative Research (SBIR) award from NASA. Kennedy’s A.J. Nick will lead CubeRover testing in the coming months in the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant at Kennedy’s Swamp Works. In 2019, NASA announced a $2 million Tipping Point award to develop more mature CubeRover’s payload interfaces and increase its capabilities.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

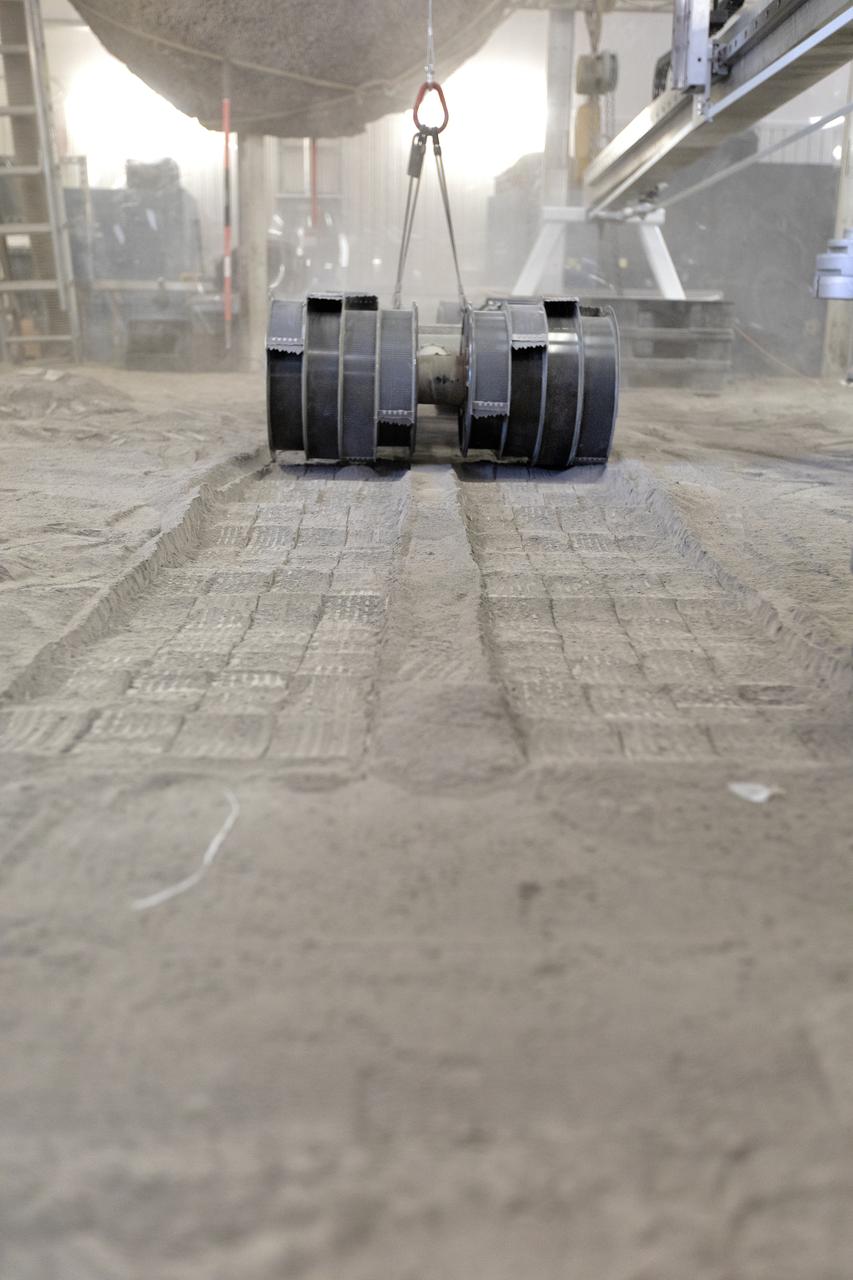
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA astronauts Randy Bresnik (left) and Jessica Watkins (center) visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronauts Randy Bresnik (center) and Jessica Watkins (right) visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks. Bresnick holds an instrument designed to help astronauts electromagnetically remove accumulated lunar dust.

Rayshaun Wheeler said he created “forever-lasting memories” during his 10-week work experience at NASA’s Kennedy Space Center in Florida. A Farmville, Virginia, native, Wheeler is about halfway through his doctoral course work at the University of Virginia. At Kennedy, he worked under mentor Jason Schuler at Kennedy’s Granular Mechanics and Regolith Operations Lab in the center’s Swamp Works facility.
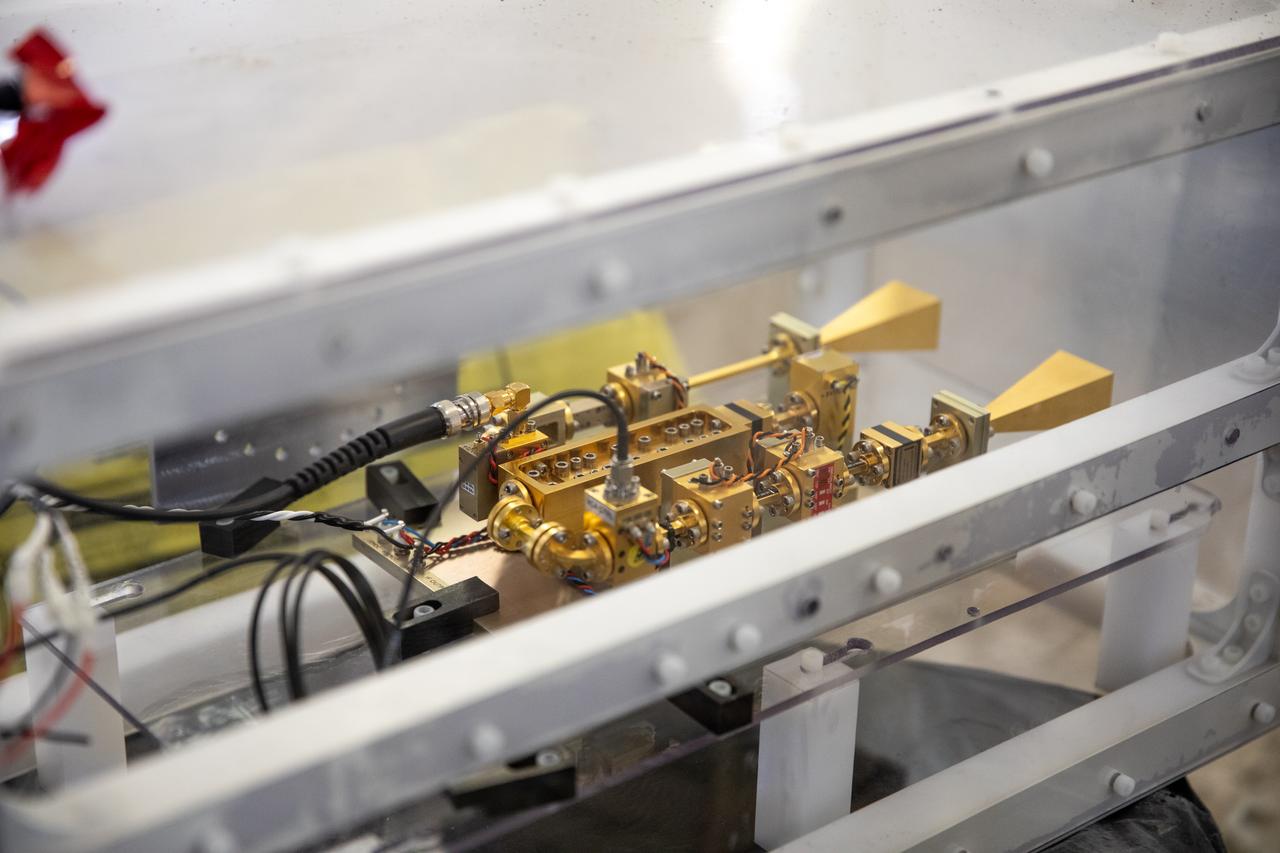
Beverly Kemmerer and Austin Adkins, right, and Austin Langton, perform testing with a Millimeter Wave Doppler Radar at NASA’s Kennedy Space Center’s Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing at the Florida spaceport is part of a project to identify a suite of instrumentation capable of acquiring a comprehensive set of flight data from a lunar lander. Researchers at NASA will use that data to validate computational models being developed to predict plume surface interaction effects on the Moon.

NASA astronauts Randy Bresnik (far left) and Jessica Watkins (center) visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that NASA astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks. Watkins holds an instrument designed to help astronauts electromagnetically remove accumulated lunar dust.

NASA astronauts Jessica Watkins and Randy Bresnik visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

Rayshaun Wheeler said he created “forever-lasting memories” during his 10-week work experience at NASA’s Kennedy Space Center in Florida. A Farmville, Virginia, native, Wheeler is about halfway through his doctoral course work at the University of Virginia. At Kennedy, he worked under mentor Jason Schuler at Kennedy’s Granular Mechanics and Regolith Operations Lab in the center’s Swamp Works facility.

NASA astronauts Randy Bresnik and Jessica Watkins visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.

NASA astronauts Randy Bresnik (left) and Jessica Watkins (center) visit the Granular Mechanics and Regolith Operations Laboratory inside Swamp Works at Kennedy Space Center in Florida on Wednesday, Aug. 27, 2025, to view some of the evolving technologies in development that astronauts may use to explore the Moon’s surface, prepare it for sustainable outposts, and to handle the dust that is collected during moonwalks.
Beverly Kemmerer and Austin Adkins perform testing with a Millimeter Wave Doppler Radar at NASA’s Kennedy Space Center’s Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing at the Florida spaceport is part of a project to identify a suite of instrumentation capable of acquiring a comprehensive set of flight data from a lunar lander. Researchers at NASA will use that data to validate computational models being developed to predict plume surface interaction effects on the Moon.
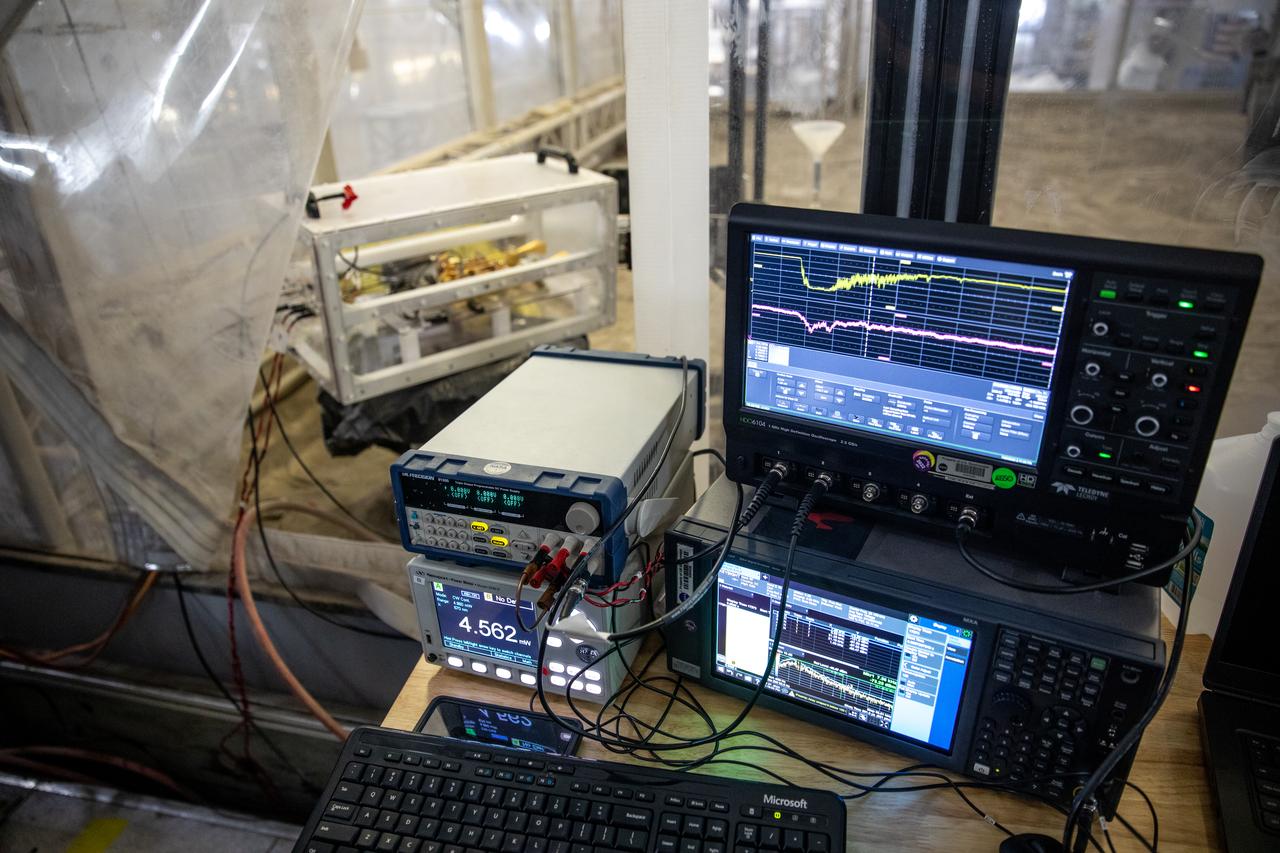
The Dust Concentration Monitor and the Millimeter Wave Doppler Radar undergo testing inside a regolith bin at the Granular Mechanics and Regolith Operations (GMRO) lab at the Kennedy Space Center’s Swamp Works on July 28, 2022, as part of Plume Surface Interaction (PSI) Instrumentation testing. The PSI Project is advancing both modeling and testing capabilities to understand exactly how rocket exhaust plumes affect a planetary landing site. This advanced modeling will help engineers evaluate the risks of various plumes on planetary surfaces, which will help them more accurately design landers for particular locations.

A team at NASA’s Kennedy Space Center in Florida assesses the Dust Concentration Monitor and the Millimeter Wave Doppler Radar inside a regolith bin at the Granular Mechanics and Regolith Operations (GMRO) lab at the spaceport’s Swamp Works on July 28, 2022, as part of Plume Surface Interaction (PSI) Instrumentation testing. The PSI Project is advancing both modeling and testing capabilities to understand exactly how rocket exhaust plumes affect a planetary landing site. This advanced modeling will help engineers evaluate the risks of various plumes on planetary surfaces, which will help them more accurately design landers for particular locations.
A team at NASA’s Kennedy Space Center in Florida assesses the Dust Concentration Monitor and the Millimeter Wave Doppler Radar inside a regolith bin at the Granular Mechanics and Regolith Operations (GMRO) lab at the spaceport’s Swamp Works on July 28, 2022, as part of Plume Surface Interaction (PSI) Instrumentation testing. The PSI Project is advancing both modeling and testing capabilities to understand exactly how rocket exhaust plumes affect a planetary landing site. This advanced modeling will help engineers evaluate the risks of various plumes on planetary surfaces, which will help them more accurately design landers for particular locations.

A team at NASA’s Kennedy Space Center in Florida assesses the Dust Concentration Monitor and the Millimeter Wave Doppler Radar inside a regolith bin at the Granular Mechanics and Regolith Operations (GMRO) lab at the spaceport’s Swamp Works on July 28, 2022, as part of Plume Surface Interaction (PSI) Instrumentation testing. The PSI Project is advancing both modeling and testing capabilities to understand exactly how rocket exhaust plumes affect a planetary landing site. This advanced modeling will help engineers evaluate the risks of various plumes on planetary surfaces, which will help them more accurately design landers for particular locations.