
LLRV flight #1-16-61F with Bell 47 Helicopter providing chase support. The use of chase planes was a critical part of flight research well before the establishment of what was then called the NACA Muroc Flight Test Unit in September 1947 (now the NASA Dryden Flight Research Center). They act as a second set of eyes for the research pilot, warning him of any problems. When test flights of the LLRV began in October 1964, chase support for the vehicle was supplied by a Bell 47 helicopter. It could hover close by, providing information such as altitude and descent rate. LLRV test operations were phased out in late 1966 and early 1967. When Apollo planning was underway in 1960, NASA was looking for a simulator to profile the descent to the Moon's surface. Three concepts surfaced: an electronic simulator, a tethered device, and the ambitious Dryden contribution, a free-flying vehicle. All three became serious projects, but eventually the NASA Flight Research Center’s (FRC) Lunar Landing Research Vehicle (LLRV) became the most significant one. After conceptual planning and meetings with engineers from Bell Aerosystems Company, Buffalo, N.Y., NASA FRC issued a $3.6 million production contract awarded in 1963, for delivery of the first of two vehicles for flight studies. Built of tubular aluminum alloy like a giant four-legged bedstead, the vehicle was to simulate a lunar landing profile from around 1500 feet to the Moon’s surface. The LLRV had a turbofan engine mounted vertically in a gimbal, with 4200 pounds of thrust. The engine, lifted the vehicle up to the test altitude and was then throttled back to support five-sixths of the vehicle's weight, thus simulating the reduced gravity of the Moon. Two lift rockets with thrust that could be varied from 100 to 500 pounds handled the LLRV's rate of descent and horizontal translations. Sixteen smaller rockets, mounted in pairs, gave the pilot control in pitch, yaw, and roll. The pilot’s platform extended forward between t
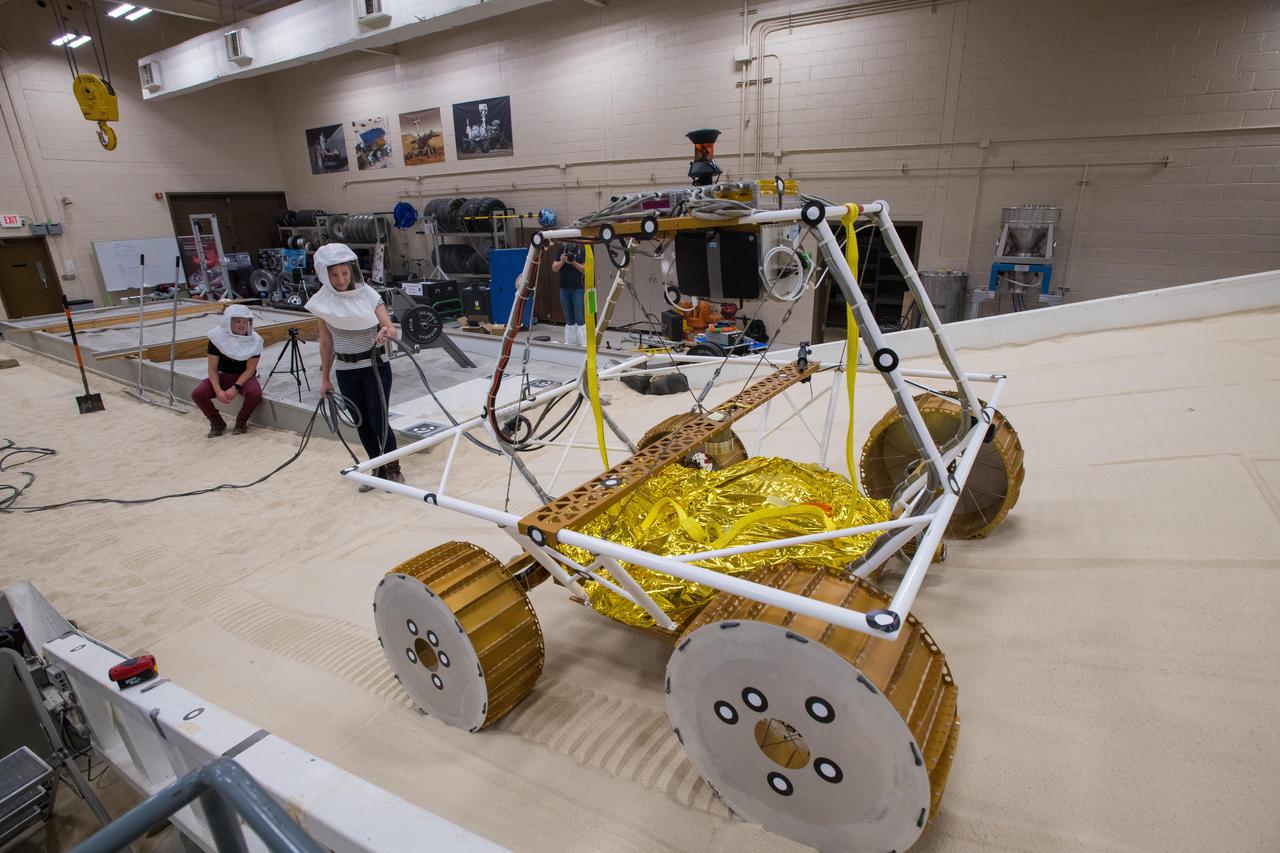
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing An engineering model of the Volatiles Investigating Polar Exploration Rover, or VIPER, is tested in the Simulated Lunar Operations Laboratory at NASA’s Glenn Research Center in Cleveland, Ohio. About the size of a golf cart, VIPER is a mobile robot that will roam around the Moon’s South Pole looking for water ice in the region and for the first time ever, actually sample the water ice at the same pole where the first woman and next man will land in 2024 under the Artemis program. The large, adjustable soil bin contains lunar simulant and allows engineers to mimic the Moon’s terrain. Engineers from NASA’s Johnson Space Center in Houston, where the rover was designed and built, joined the Glenn team to complete the tests. Test data will be used to evaluate the traction of the vehicle and wheels, determine the power requirements for a variety of maneuvers and compare methods of traversing steep slopes. Respirators are worn by researchers to protect against the airborne silica that is present during testing. VIPER is a collaboration within and beyond the agency. NASA's Ames Research Center in Silicon Valley is managing the project, leading the mission’s science, systems engineering, real-time rover surface operations and software. The rover’s instruments are provided by Ames, NASA’s Kennedy Space Center in Florida and commercial partner, Honeybee Robotics in California. The spacecraft, lander and launch vehicle that will deliver VIPER to the surface of the Moon will be provided through NASA’s Commercial Lunar Payload Services program, delivering science and technology payloads to and near the Moon.