
During pre-flight testing in March 2011, the Mars Hand Lens Imager MAHLI camera on NASA Mars rover Curiosity took this image of the MAHLI calibration target under illumination from MAHLI two ultraviolet LEDs light emitting diodes.
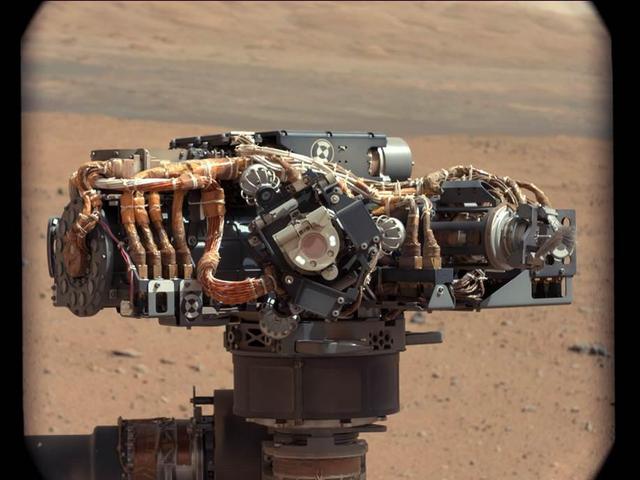
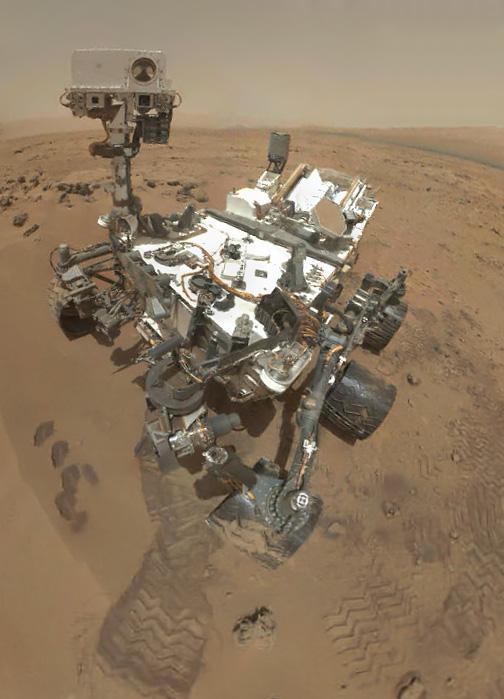
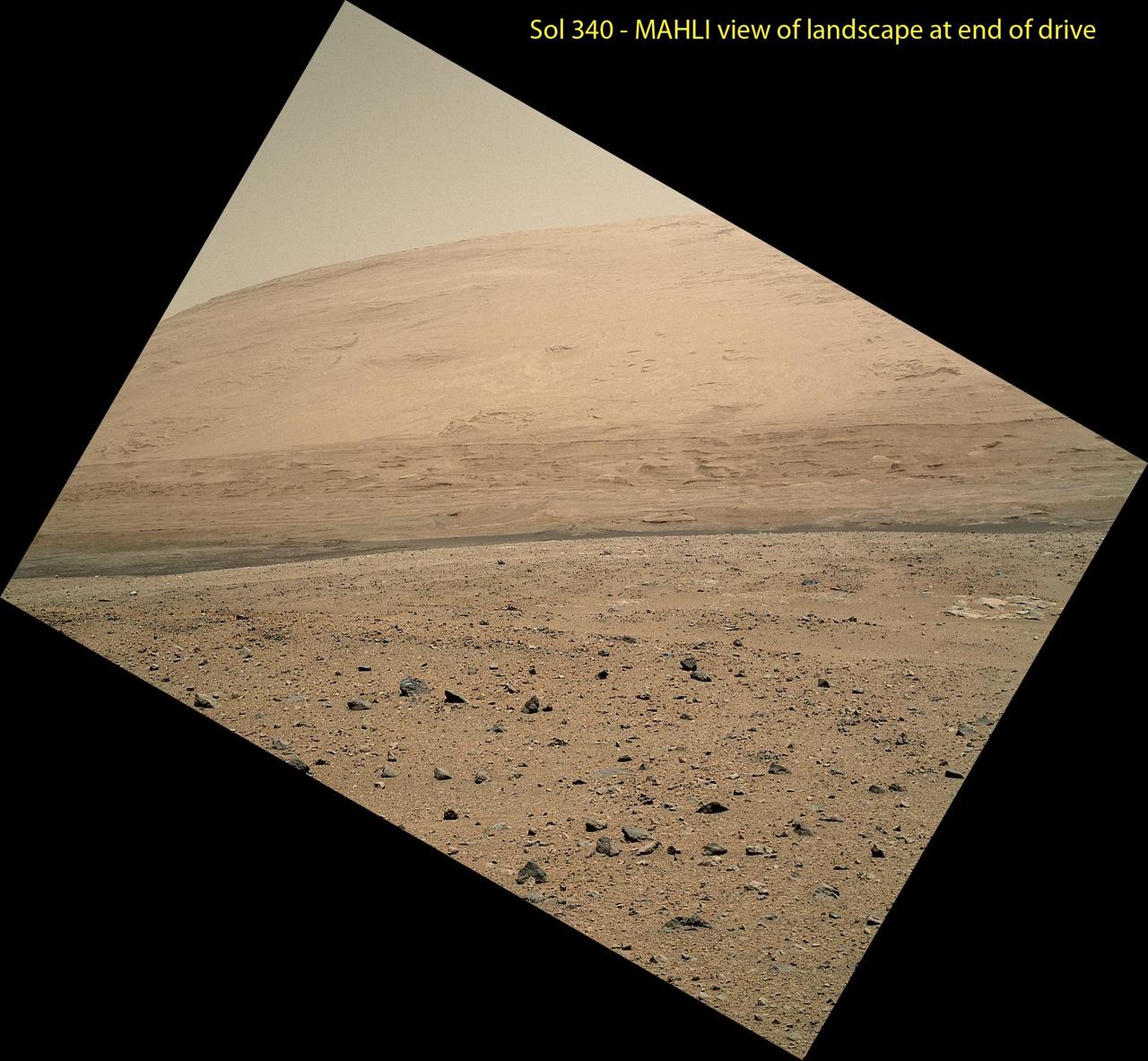
This image shows the Mars Hand Lens Imager MAHLI on NASA Curiosity rover, with the Martian landscape in the background. The image was taken by Curiosity Mast Camera on the 32nd Martian day, or sol, of operations on the surface.

This image provides a way to have a full-size printout of the calibration target for the Mars Hand Lens Imager MAHLI camera on NASA Mars rover Curiosity.
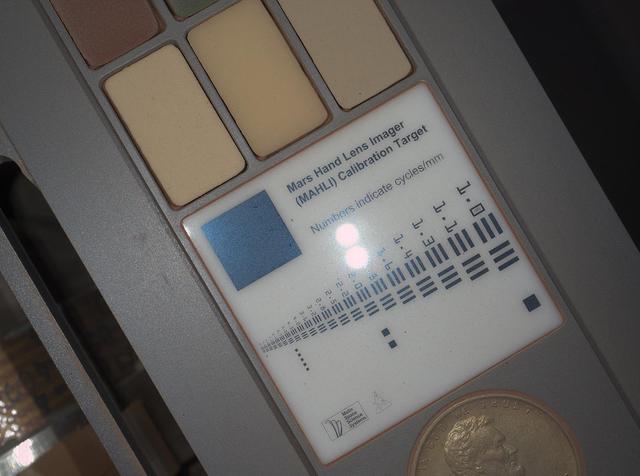
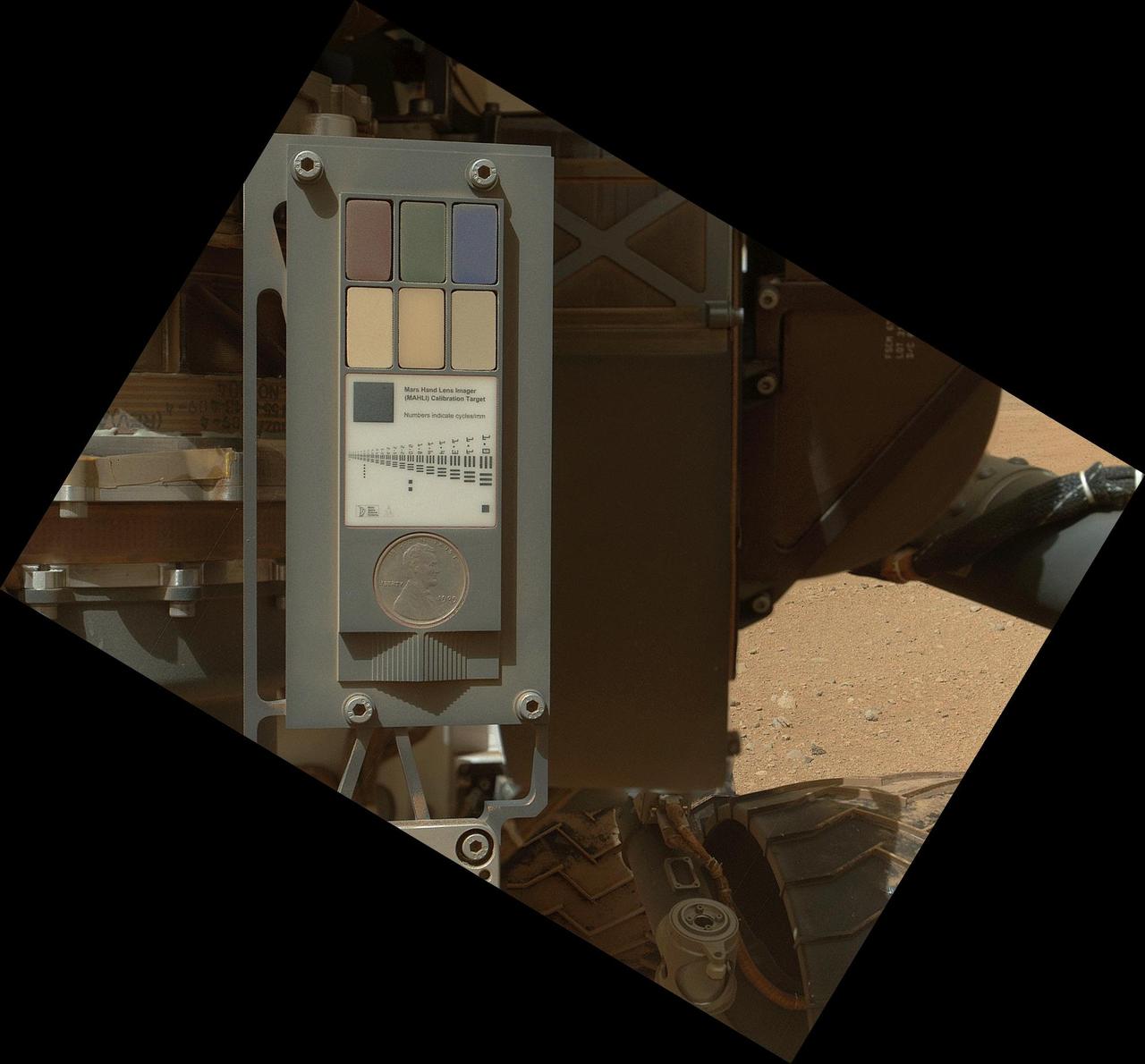
For scale, the Lincoln penny on the MAHLI calibration target is three-fourths inch 19 millimeters in diameter. The calibration target is mounted on NASA Mars rover Curiosity.
This view of a sandstone target called "Big Arm" covers an area about 1.3 inches (33 millimeters) wide in detail that shows differing shapes and colors of sand grains in the stone. Three separate images taken by the Mars Hand Lens Imager (MAHLI) camera on NASA's Curiosity Mars rover, at different focus settings, were combined into this focus-merge view. The Big Arm target on lower Mount Sharp is at a location near "Marias Pass" where a mudstone bedrock is in contact with overlying sandstone bedrock. MAHLI recorded the component images on May 29, 2015, during the 999th Martian day, or sol, of Curiosity's work on Mars. The rounded shape of some grains visible here suggests they traveled long distances before becoming part of the sediment that later hardened into sandstone. Other grains are more angular and may have originated closer to the rock's current location. Lighter and darker grains may have different compositions. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. http://photojournal.jpl.nasa.gov/catalog/PIA19677

A rock fragment dubbed "Lamoose" is shown in this picture taken by the Mars Hand Lens Imager (MAHLI) on NASA's Curiosity rover. Like other nearby rocks in a portion of the "Marias Pass" area of Mt. Sharp, Mars, it has unusually high concentrations of silica. The high silica was first detected in the area by the Chemistry & Camera (ChemCam) laser spectrometer. This rock was targeted for follow-up study by the MAHLI and the arm-mounted Alpha Particle X-ray Spectrometer (APXS). Silica is a rock-forming compound containing silicon and oxygen, commonly found on Earth as quartz. High levels of silica could indicate ideal conditions for preserving ancient organic material, if present, so the science team wants to take a closer look. The rock is about 4 inches (10 centimeters) across. It is fine-grained, perhaps finely layered, and etched by the wind. The image was taken on the 1,041st Martian day, or sol, of the mission (July 11, 2015). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19828
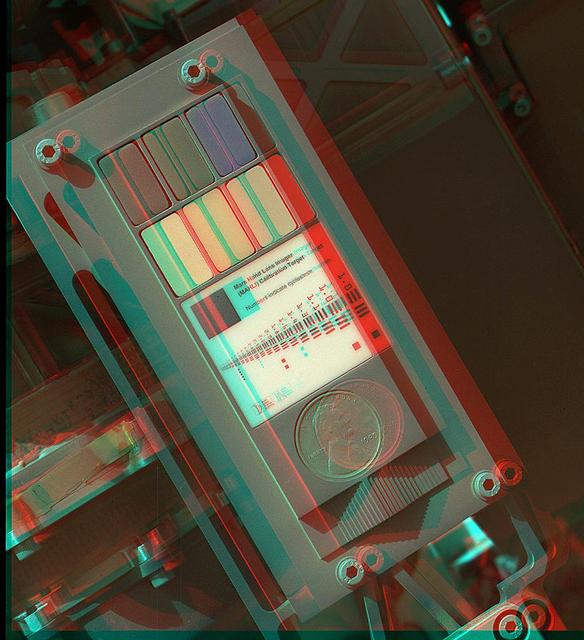
This 3-D view of the calibration target for the MAHLI camera aboard NASA Mars rover Curiosity was assembled from two images taken by that camera during the 34th Martian day. The camera is on the turret of tools at the end of Curiosity robotic arm.
Illumination in this image comes from MAHLI two ultraviolet LEDs, which emit light in a waveband centered at a wavelength of 365 nanometers in this image of a calibration target on NASA Mars rover Curiosity.

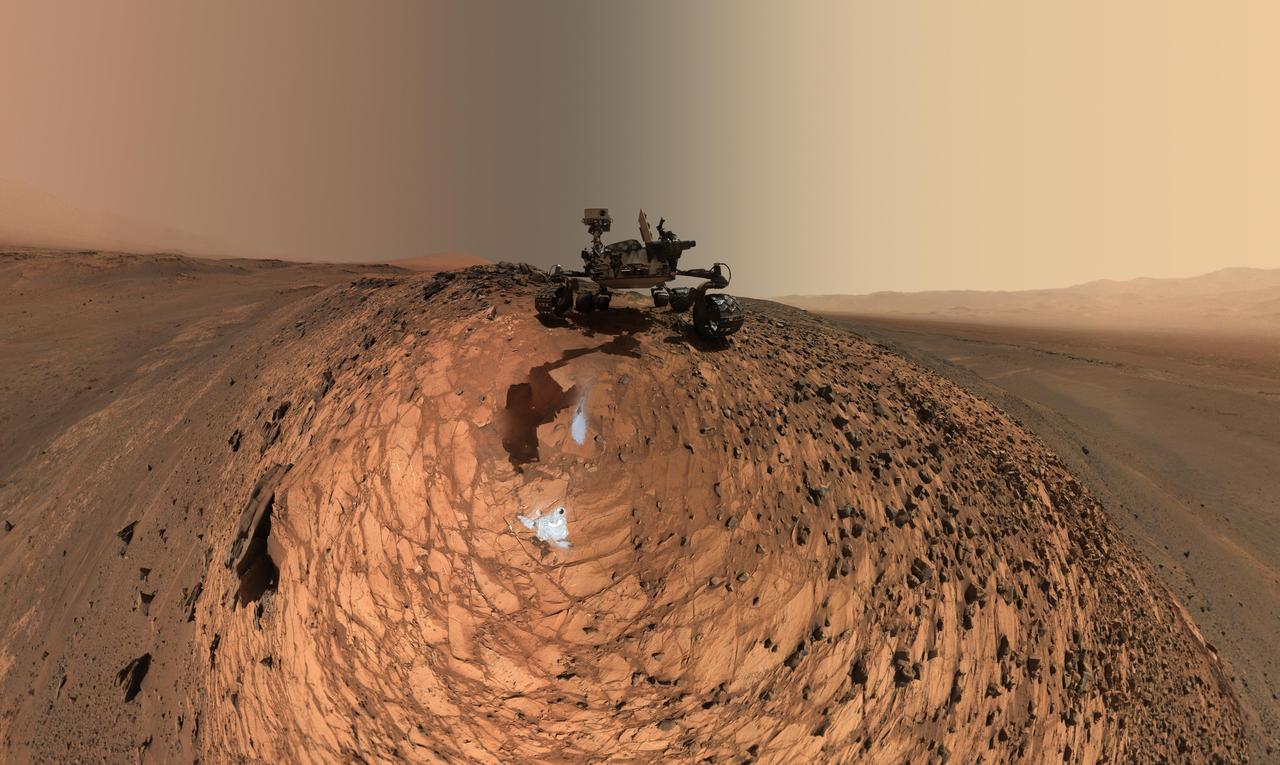
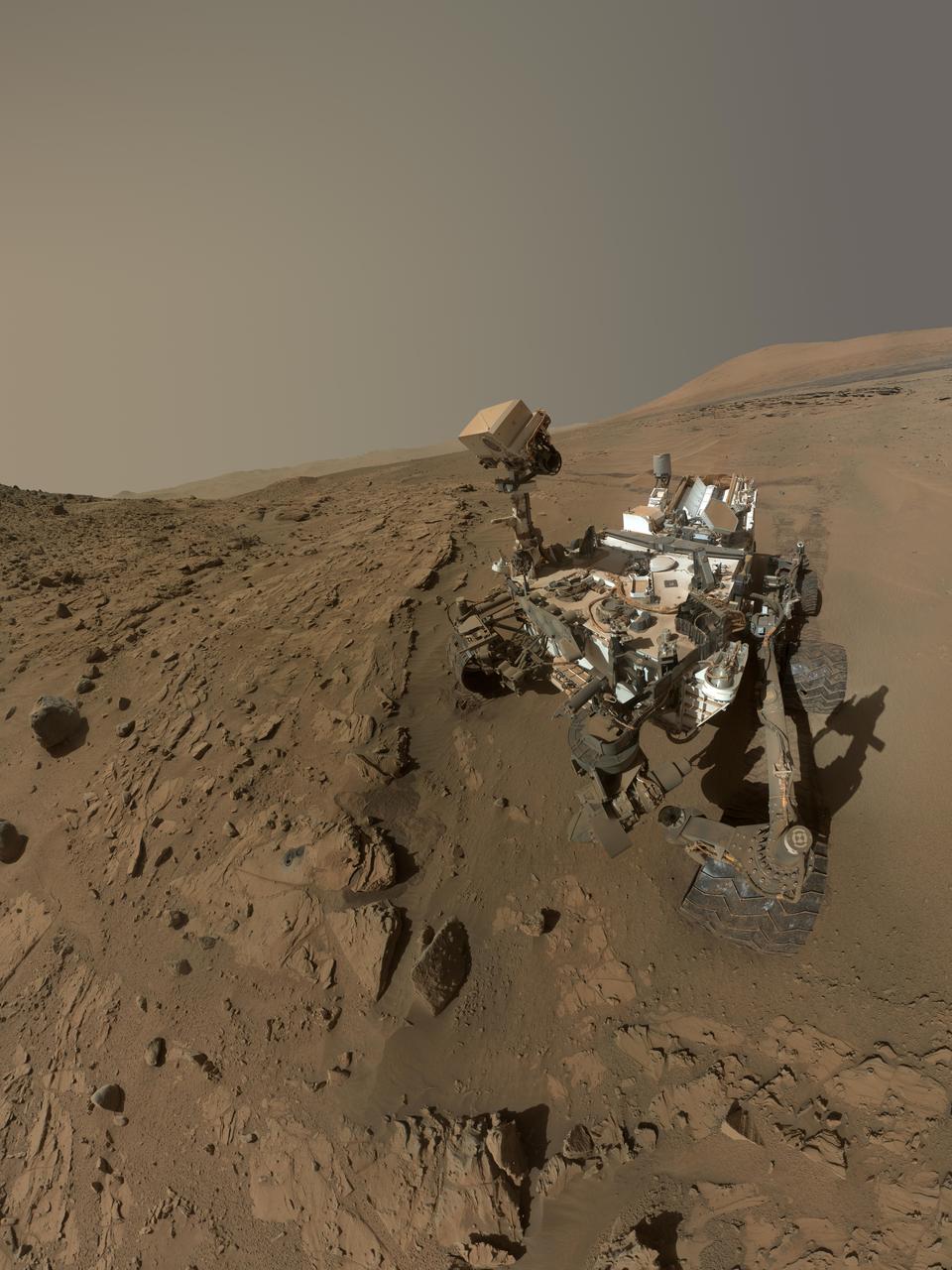
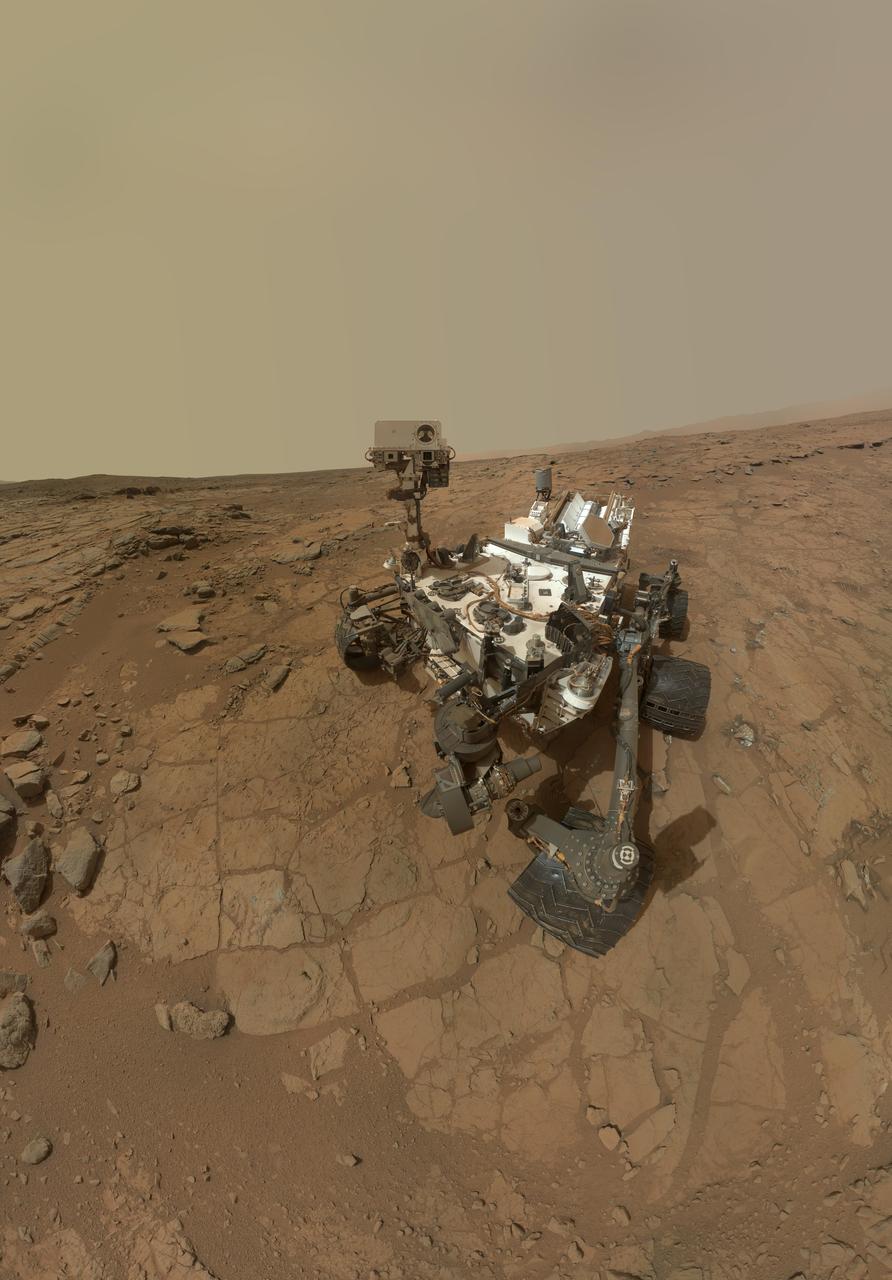
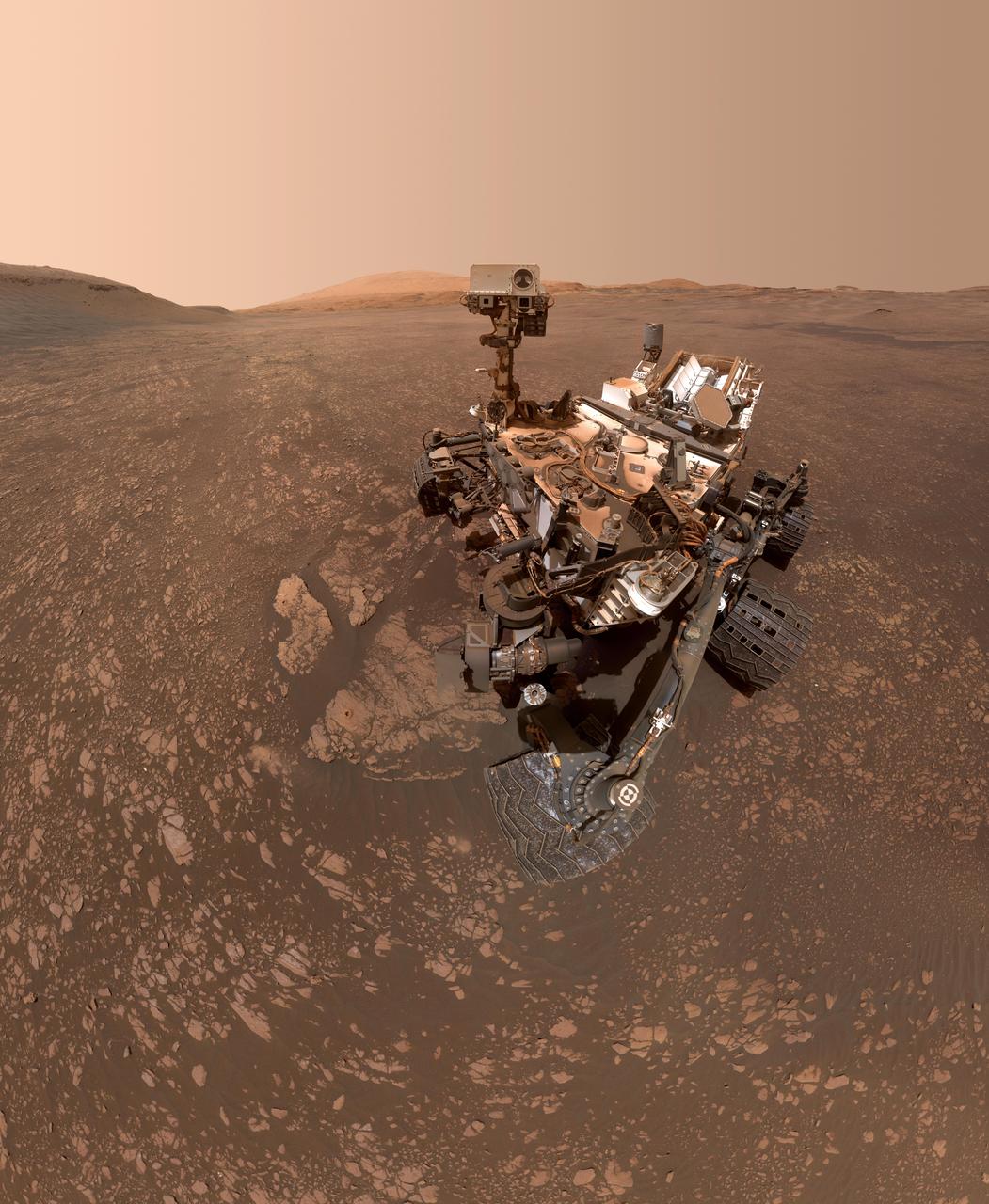
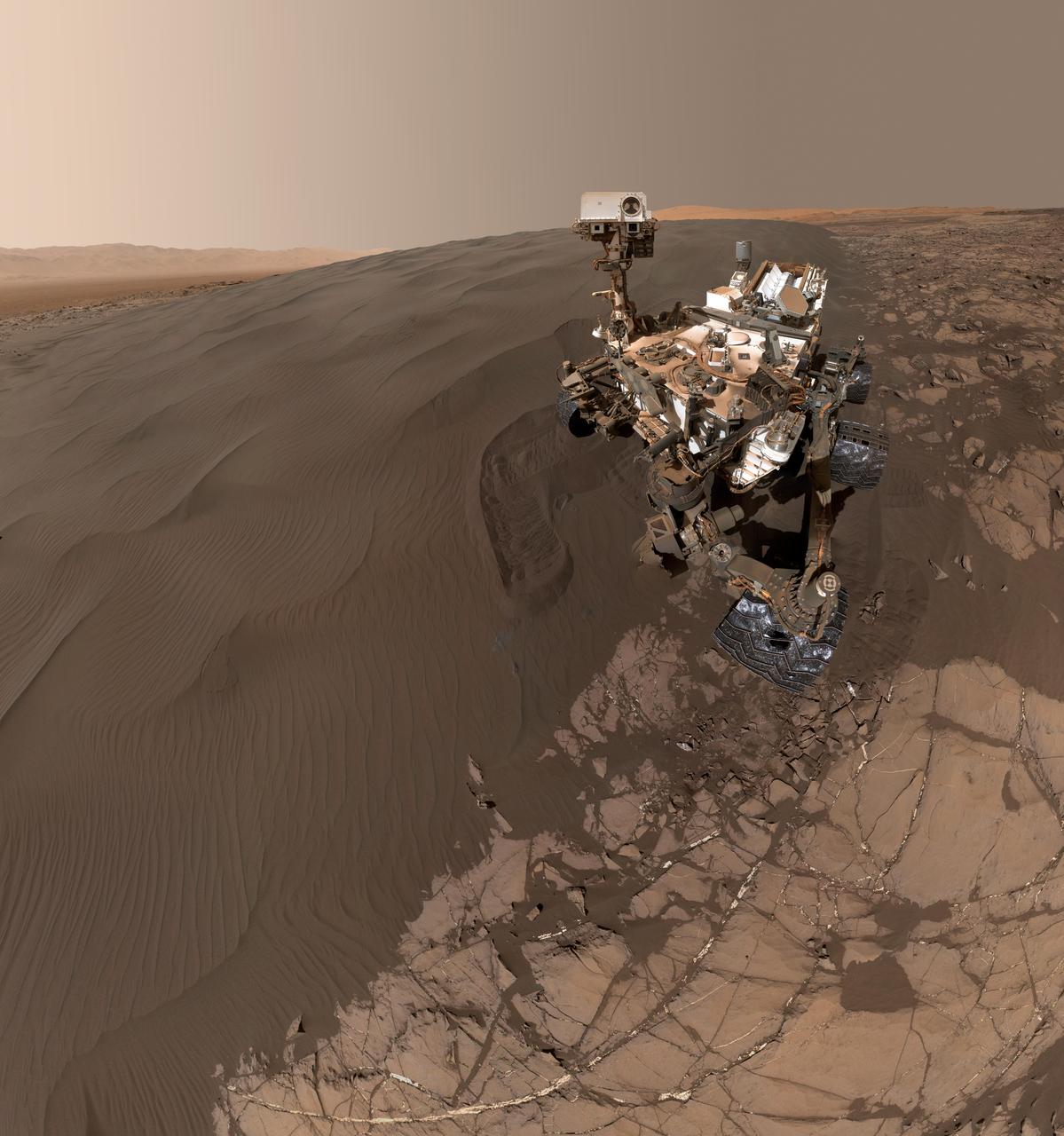
This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called "Buckskin" on lower Mount Sharp. The selfie combines several component images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. This view is a portion of a larger panorama available at PIA19807. A close look reveals a small rock stuck onto Curiosity's left middle wheel (on the right in this head-on view). The rock had been seen previously during periodic monitoring of wheel condition about three weeks earlier, in the MAHLI raw image at http://mars.nasa.gov/msl/multimedia/raw/?rawid=1046MH0002640000400290E01_DXXX&s=1046. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (/catalog/PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. The selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19808

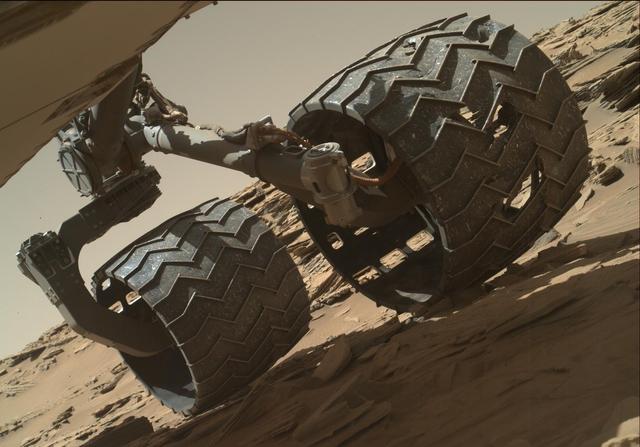
Two of the raised treads, called grousers, on the left middle wheel of NASA's Curiosity Mars rover broke during the first quarter of 2017, including the one seen partially detached at the top of the wheel in this image from the Mars Hand Lens Imager (MAHLI) camera on the rover's arm. This image was taken on March 19, 2017, as part of a set used by rover team members to inspect the condition of the rover's six wheels during the 1,641st Martian day, or sol, of Curiosity's work on Mars. Holes and tears in the wheels worsened significantly during 2013 as Curiosity was crossing terrain studded with sharp rocks on the route from near its 2012 landing site to the base of Mount Sharp. Team members have used MAHLI systematically since then to watch for when any of the zig-zag shaped grousers begin to break. The last prior set of wheel-inspection images from before Sol 1641 was taken on Jan. 27, 2017, (Sol 1591) and revealed no broken grousers. Longevity testing with identical aluminum wheels on Earth indicates that when three grousers on a given wheel have broken, that wheel has reached about 60 percent of its useful life. Curiosity has driven well over 60 percent of the amount needed for reaching all the geological layers planned as the mission's science destinations, so the start of seeing broken grousers is not expected to affect the mission's operations. Curiosity's six aluminum wheels are about 20 inches (50 centimeters) in diameter and 16 inches (40 centimeters) wide. Each of the six wheels has its own drive motor, and the four corner wheels also have steering motors. http://photojournal.jpl.nasa.gov/catalog/PIA21486

This view from the Mars Hand Lens Imager (MAHLI) on the arm of NASA's Curiosity Mars rover shows texture within a light-toned vein at a site called "Garden City" on lower Mount Sharp. The area shown is roughly 0.9 inch (2.2 centimeters) wide. It was taken during the 946th Martian day, or sol, of Curiosity's work on Mars (April 4, 2015). Differences in textures of light-toned veins in the Garden City complex of crisscrossing mineral veins are clues that these veins may result from distinct fluid events. This vein's texture shows indications of crystal growth, suggesting that crystallization may have exerted a force for opening the fracture filled by the vein. Different examples are at PIA19926 and PIA19927. Mineral veins often form where fluids move through fractured rocks, depositing minerals in the fractures and affecting chemistry of the surrounding rock. At Garden City, the veins have been more resistant to erosion than the surrounding host rock. The fluid movement through fractures at Garden City occurred later than wet environmental conditions in which the host rock formed, before it hardened and cracked. Malin Space Science Systems, San Diego, built and operates MAHLI. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19925

A Martian rock in the Yellowknife Bay area of Mars Gale Crater is illuminated by white-light light emitting diodes is part of the first set of nighttime images taken by the MAHLI camera at the end of the robotic arm of NASA Mars rover Curiosity.

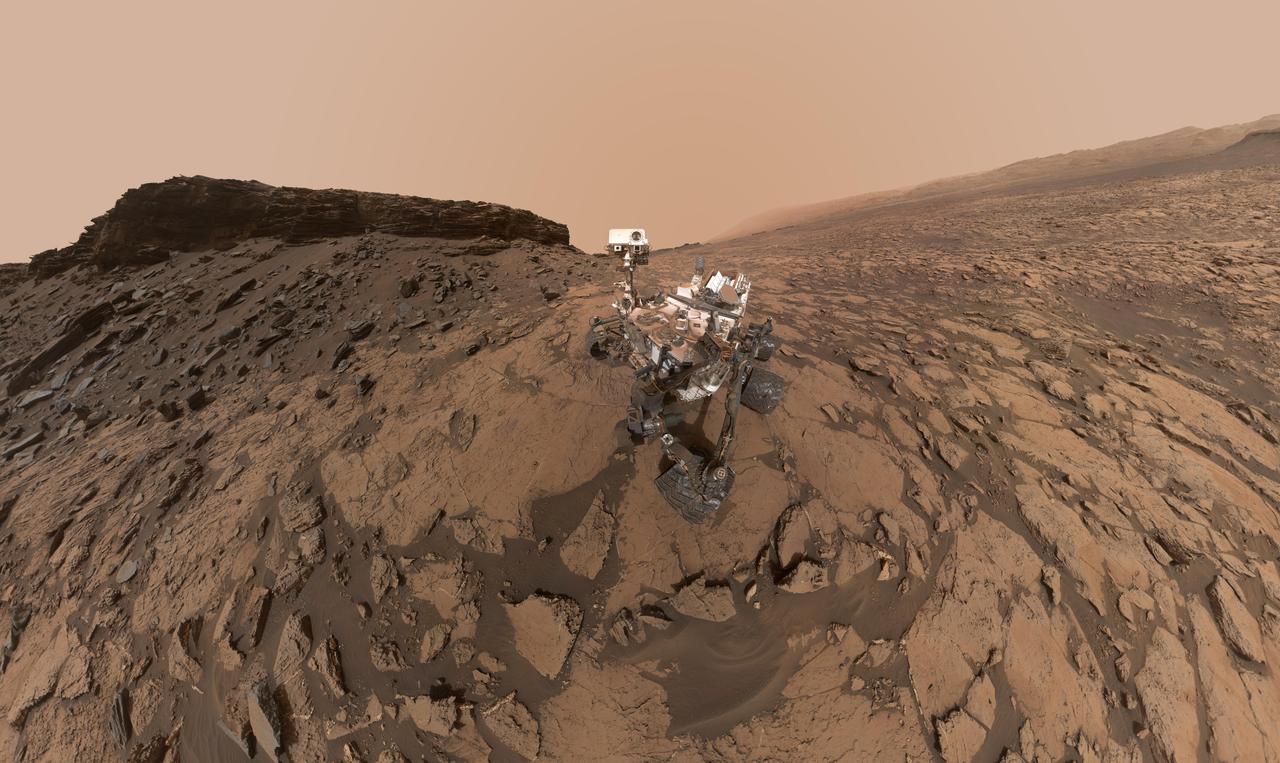
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site, where its drill collected the mission's fifth taste of Mount Sharp. The scene combines dozens of images taken during the 1,126th Martian day, or sol, of Curiosity's work during Mars (Oct. 6, 2015, PDT), by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover's robotic arm. The rock drilled at this site is sandstone in the Stimson geological unit inside Gale Crater. The location is on cross-bedded sandstone in which the cross bedding is more evident in views from when the rover was approaching the area, such as PIA19818. The view is centered toward the west-northwest. It does not include the rover's robotic arm, though the shadow of the arm is visible on the ground. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937) and "Windjana" (PIA18390). This portrait of the rover was designed to show the Chemistry and Camera (ChemCam) instrument atop the rover appearing level. This causes the horizon to appear to tilt toward the left, but in reality it is fairly flat. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. The drilled hole in the rock, appearing grey near the lower left corner of the image, is 0.63 inch (1.6 centimeters) in diameter. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19920

NASA's Curiosity Mars Rover drilled this hole to collect sample material from a rock target called "Buckskin" on July 30, 2015, during the 1060th Martian day, or sol, of the rover's work on Mars. The diameter is slightly smaller than a U.S. dime. Curiosity landed on Mars on Aug. 6, 2012, Universal Time (evening of Aug. 5, PDT). The rover took this image with the Mars Hand Lens Imager (MAHLI) camera, which is mounted on the same robotic arm as the sample-collecting drill. Rock powder from the collected sample was subsequently delivered to a laboratory inside the rover for analysis. The rover's drill did not experience any sign during this sample collection of an intermittent short-circuiting issue that was detected earlier in 2015. The Buckskin target is in an area near "Marias Pass" on lower Mount Sharp where Curiosity had detected unusually high levels of silica and hydrogen. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19804
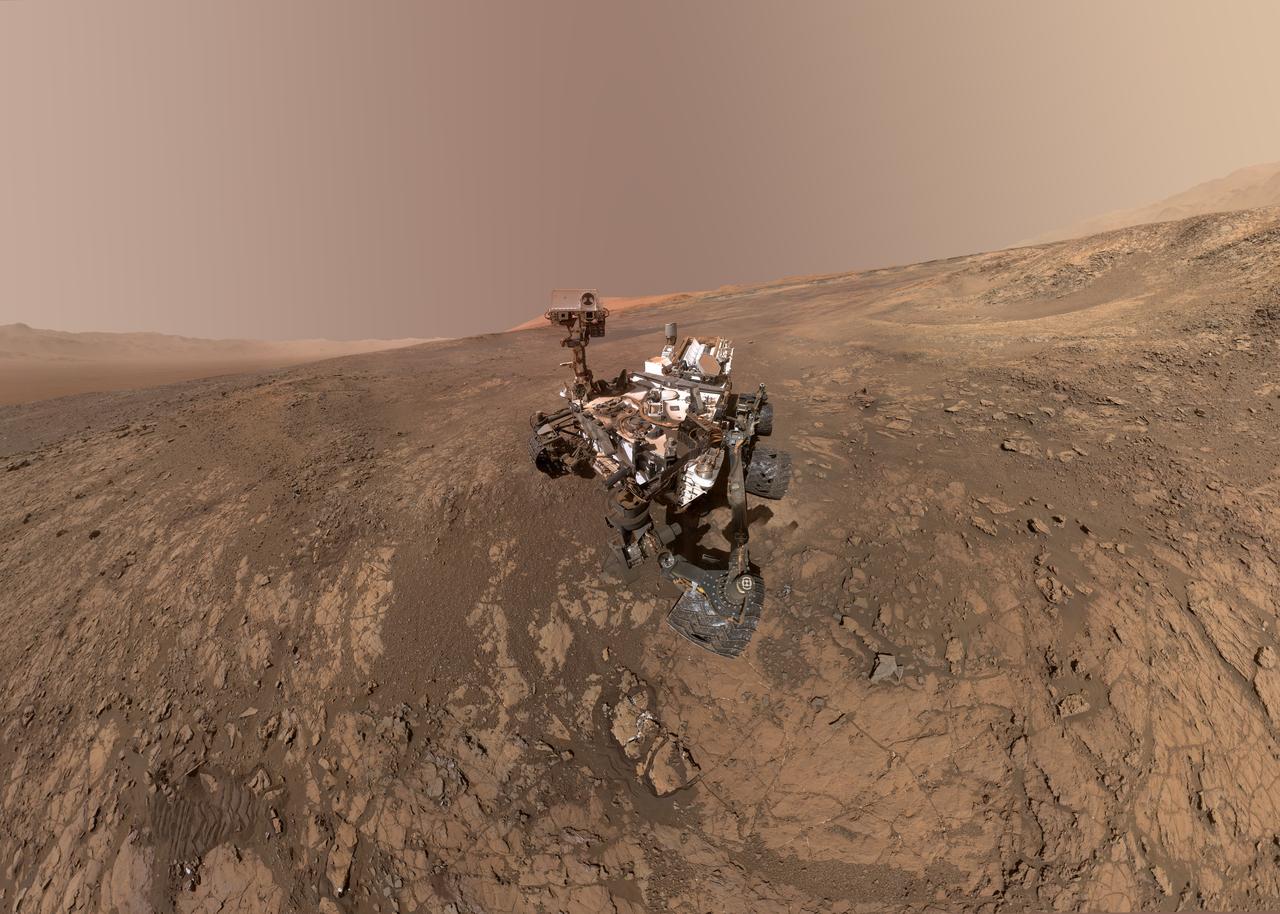
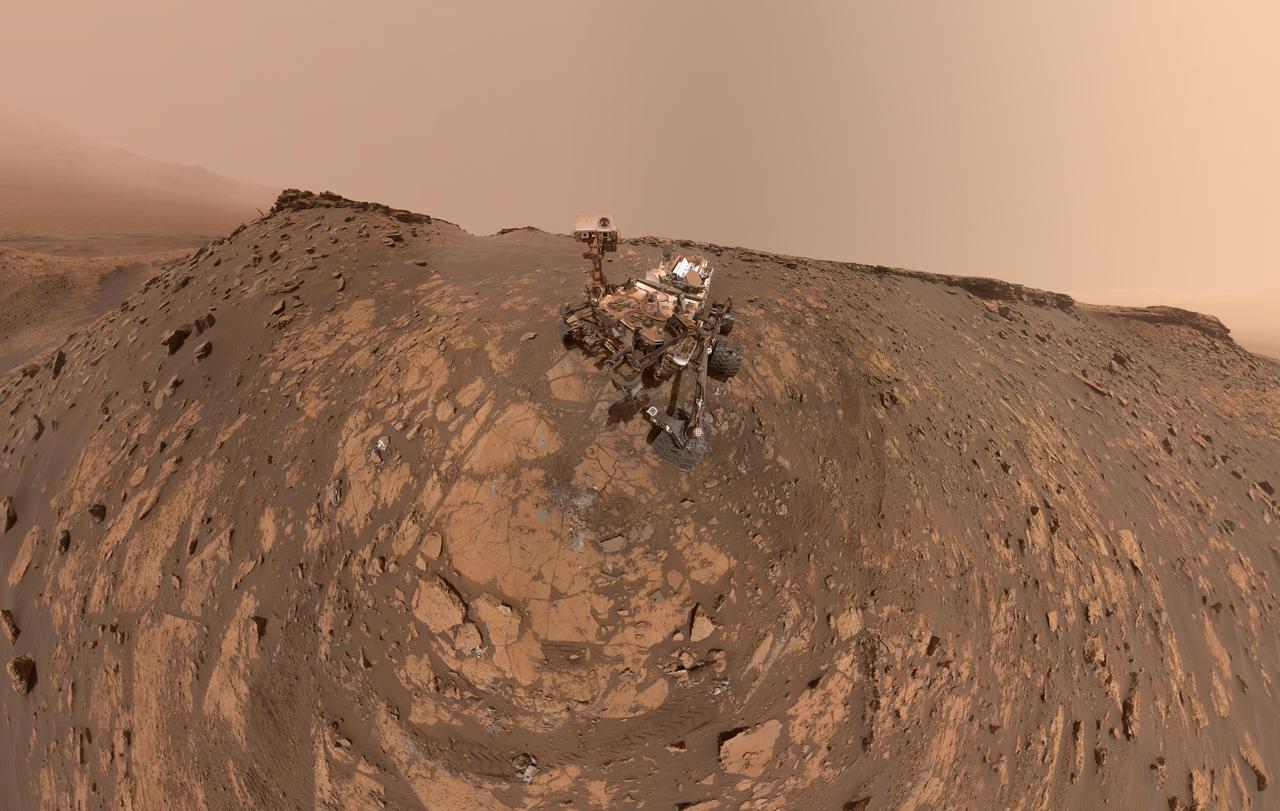
This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle above the "Buckskin" rock target, where the mission collected its seventh drilled sample. The site is in the "Marias Pass" area of lower Mount Sharp. The scene combines dozens of images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. The 92 component images are among MAHLI Sol 1065 raw images at http://mars.nasa.gov/msl/multimedia/raw/?s=1065&camera=MAHLI. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the Marias Pass area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates the horizon on the left and right of the mosaic. A portion of this selfie cropped tighter around the rover is at PIA19808. Another version of the wide view, presented in a projection that shows the horizon as a circle, is at PIA19806. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. Before sending Curiosity the arm-positioning commands for this Buckskin belly panorama, the team previewed the low-angle sequence of camera pointings on a test rover in California. A mosaic from that test is at PIA19810. This selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19807
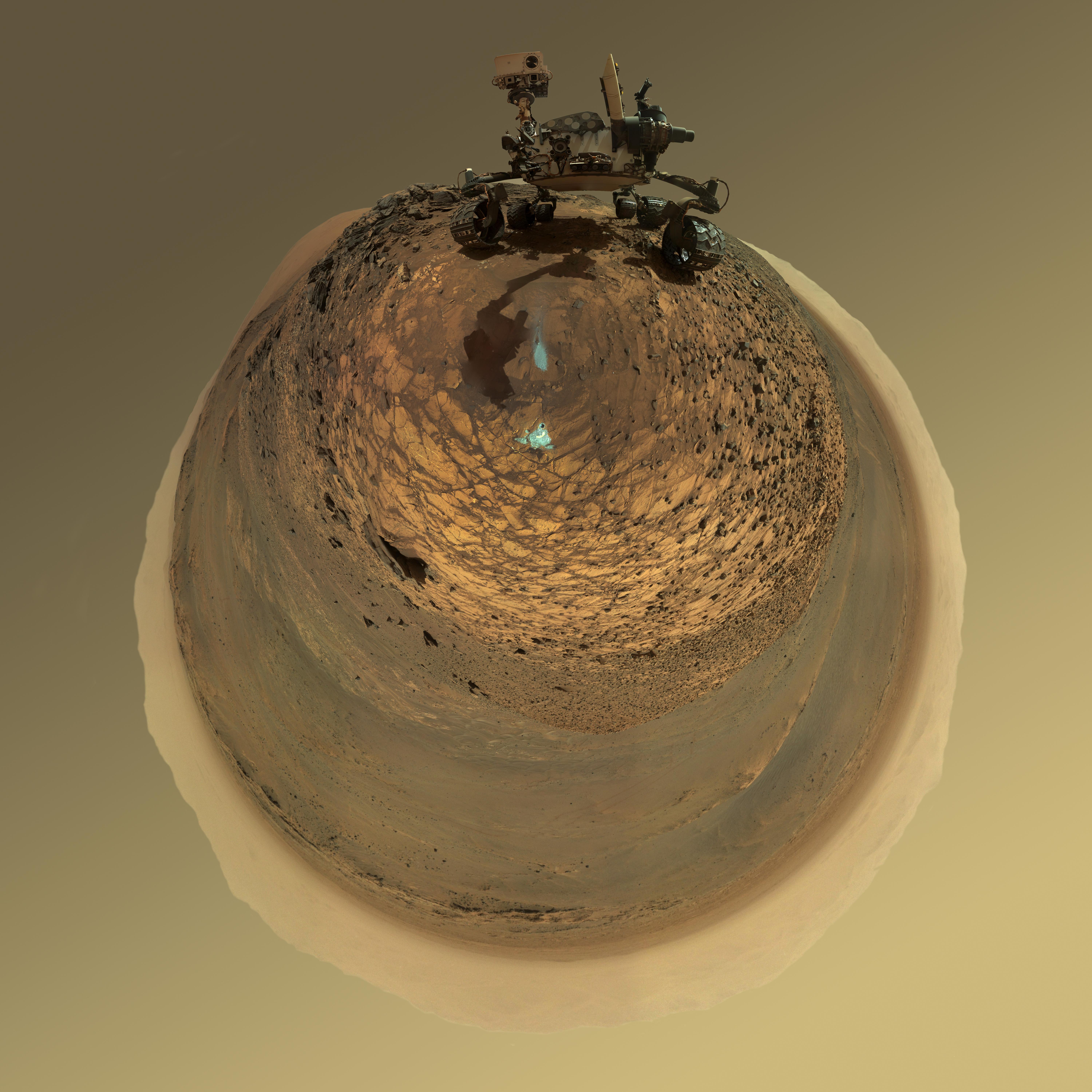
This version of a self-portrait of NASA's Curiosity Mars rover at a drilling site called "Buckskin" on lower Mount Sharp is presented as a stereographic projection, which shows the horizon as a circle. It is a mosaic assembled from the same set of 92 component raw images used for the flatter-horizon version at PIA19807. The component images were taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from inside Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the "Marias Pass" area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates most of the rest of the horizon.the horizon on the left and right of the mosaic. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. The assembled mosaic does not include the rover's arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19806
This is the highest-resolution view that the MAHLI camera on NASA Mars rover Curiosity acquired of the top of a rock called Bathurst Inlet; the rock is dark gray and is so fine-grained that MAHLI cannot resolve grains or crystals in it.

This image of a U.S. penny on a calibration target was taken by the Mars Hand Lens Imager MAHLI aboard NASA Curiosity rover in Gale Crater on Mars. At 14 micrometers per pixel, this is the highest-resolution image that MAHLI can acquire.

During pre-flight testing, the Mars Hand Lens Imager MAHLI camera on NASA Mars rover Curiosity took this image of the MAHLI calibration target from a distance of 3.94 inches 10 centimeters away from the target.

The level of detail apparent in this image from Curiosity Mars Hand Lens Imager MAHLI shows that haziness in earlier MAHLI images since landing was due to dust that had settled on the dust cover during the landing.

The penny in this image is part of a camera calibration target on NASA Mars rover Curiosity. The MAHLI camera on the rover took this image of the MAHLI calibration target during the 34th Martian day of Curiosity work on Mars, Sept. 9, 2012.

The network of cracks in this Martian rock slab called "Old Soaker" may have formed from the drying of a mud layer more than 3 billion years ago. The view spans about 4 feet (1.2 meters) left-to-right and combines three images taken by the Mars Hand Lens Imager (MAHLI) camera on the arm of NASA's Curiosity Mars rover. Mud cracks would be evidence of a time when dry intervals interrupted wetter periods that supported lakes in the area. Curiosity has found evidence of ancient lakes in older, lower-lying rock layers and also in younger mudstone that is above Old Soaker. MAHLI was positioned about 3 feet (90 centimeters) above the surface when it took the component images on Dec. 31, 2016, during the 1,566th Martian day, or sol, of Curiosity's work on Mars. This observation was planned as part of assessing a hypothesis that the target preserves evidence of drying mud. The location is within an exposure of Murray formation mudstone on lower Mount Sharp inside Gale Crater. The slab bears a network of four- and five-sided polygons about half an inch to 1 inch (1 to 2 centimeters) across, which matches the pattern commonly formed when a thin layer of mud dries. Some edges of the polygons are ridges of material the same color as the surrounding rock. This could result from a three-step process after cracks form due to drying: Wind-blown sediments accumulate in the open cracks. Later, these sediments and the dried mud become rock under the pressure of multiple younger layers that accumulate on top of them. Most recently, after the overlying layers were eroded away by wind, the vein-filling material resists erosion better than the once-muddy material, so the pattern that began as cracks appears as ridges. Note that some of the cracks contain material much brighter than the surrounding rock. These are mineral veins. Curiosity has found such bright veins of calcium sulfate in many rock layers the rover has investigated. These veins form from circulation of mineral-laden groundwater through underground cracks. Rover-team scientists suggest that a likely scenario for the history of Old Soaker is more than one generation of fracturing: mud cracks first, with sediment accumulating in them, then a later episode of underground fracturing and vein forming. The target rock's name comes from the name of an island off the coast of Maine. The names informally assigned by the rover team to features in the area of lower Mount Sharp that includes this slab are from a list of islands, hills and other sites in or near Maine's Bar Harbor. http://photojournal.jpl.nasa.gov/catalog/PIA21261
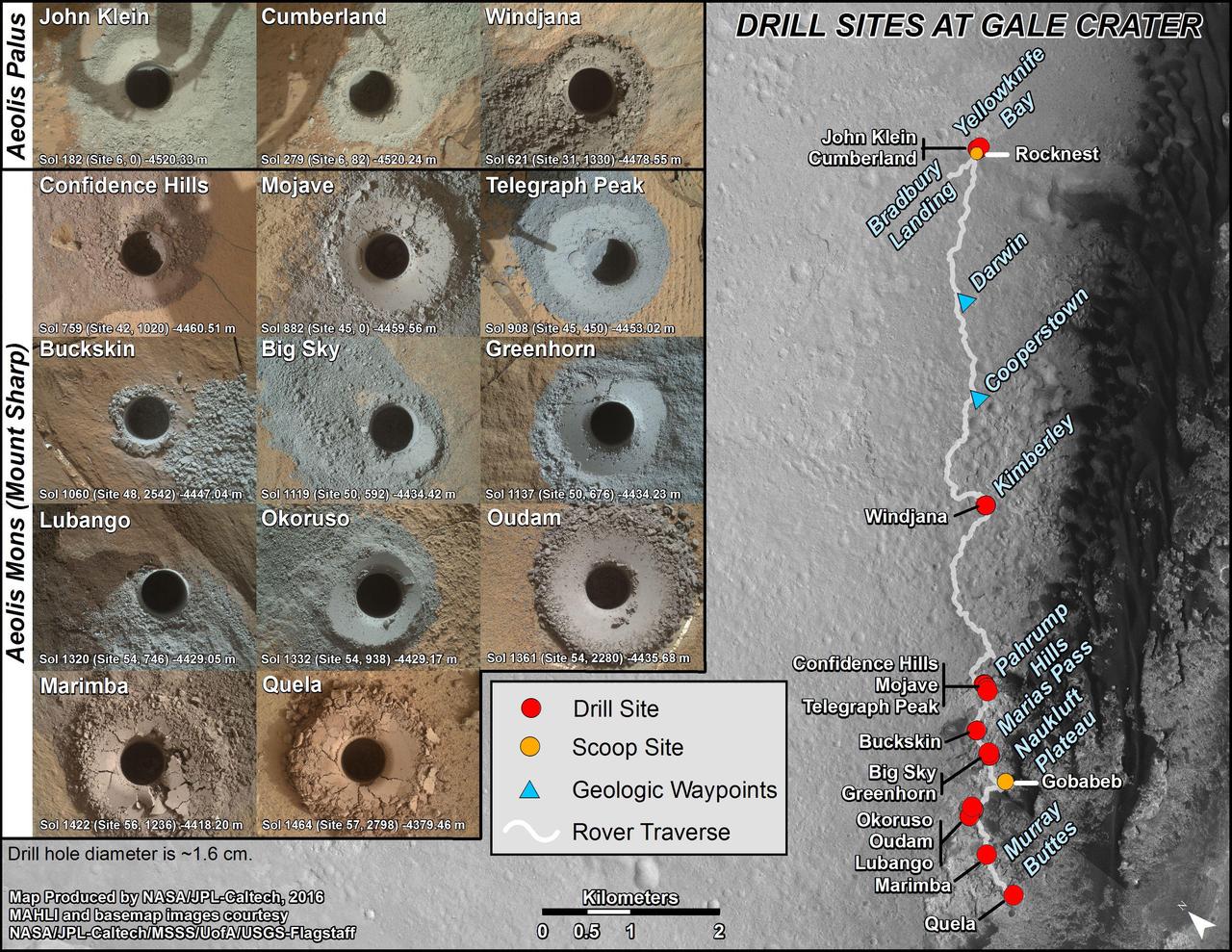
This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its first 18 rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 14 rock-powder samples were acquired. Curiosity scooped two soil samples at each of the other two sites: Rocknest and Gobabeb. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. The latest sample site included is "Quela,"where Curiosity drilled into bedrock of the Murray formation on Sept. 18, 2016, during the 1,464th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). More drilling samples collected by MSL are available at http://photojournal.jpl.nasa.gov/catalog/PIA20845
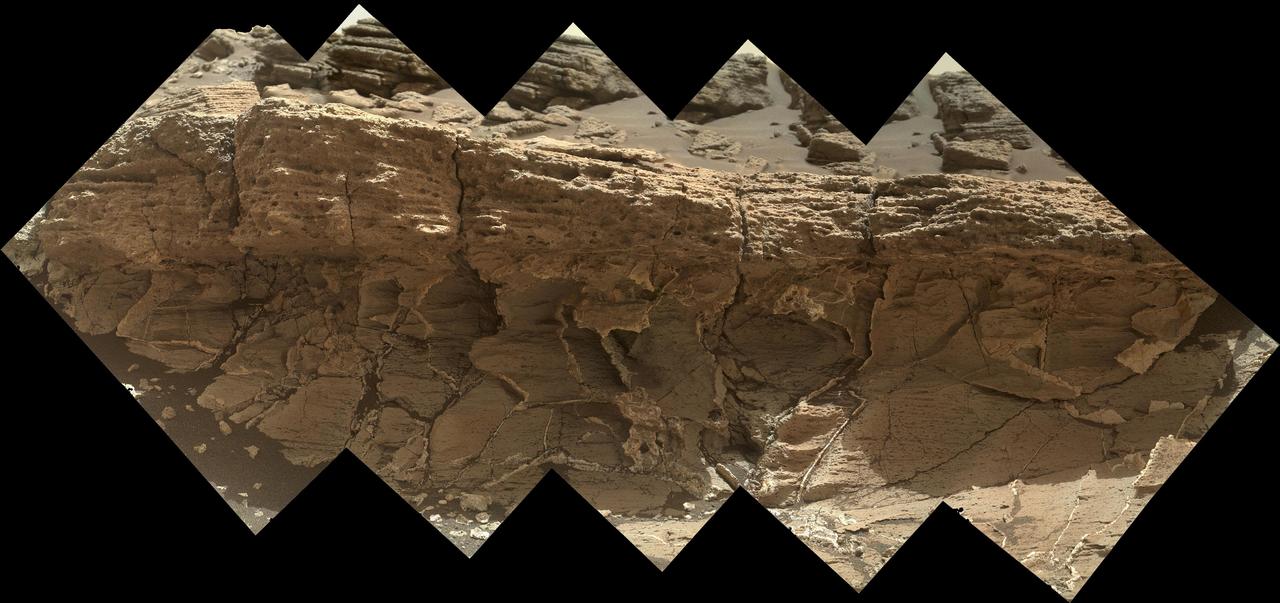
A rock outcrop dubbed "Missoula," near Marias Pass on Mars, is seen in this image mosaic taken by the Mars Hand Lens Imager on NASA's Curiosity rover. Pale mudstone (bottom of outcrop) meets coarser sandstone (top) in this geological contact zone, which has piqued the interest of Mars scientists. White mineral veins that fill fractures in the lower rock unit abruptly end when they meet the upper rock unit. Such clues help scientists understand the possible timing of geological events. First, the fine sediment that now forms the lower unit would have hardened into rock. It then would have fractured, and groundwater would have deposited calcium sulfate minerals into the fractures. Next, the coarser sediment that forms the upper unit would have been deposited. The area pictured is about 16 inches (40 centimeters) across. The image was taken on the 1,031st Martian day, or sol, of the mission (July 1, 2015). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19829
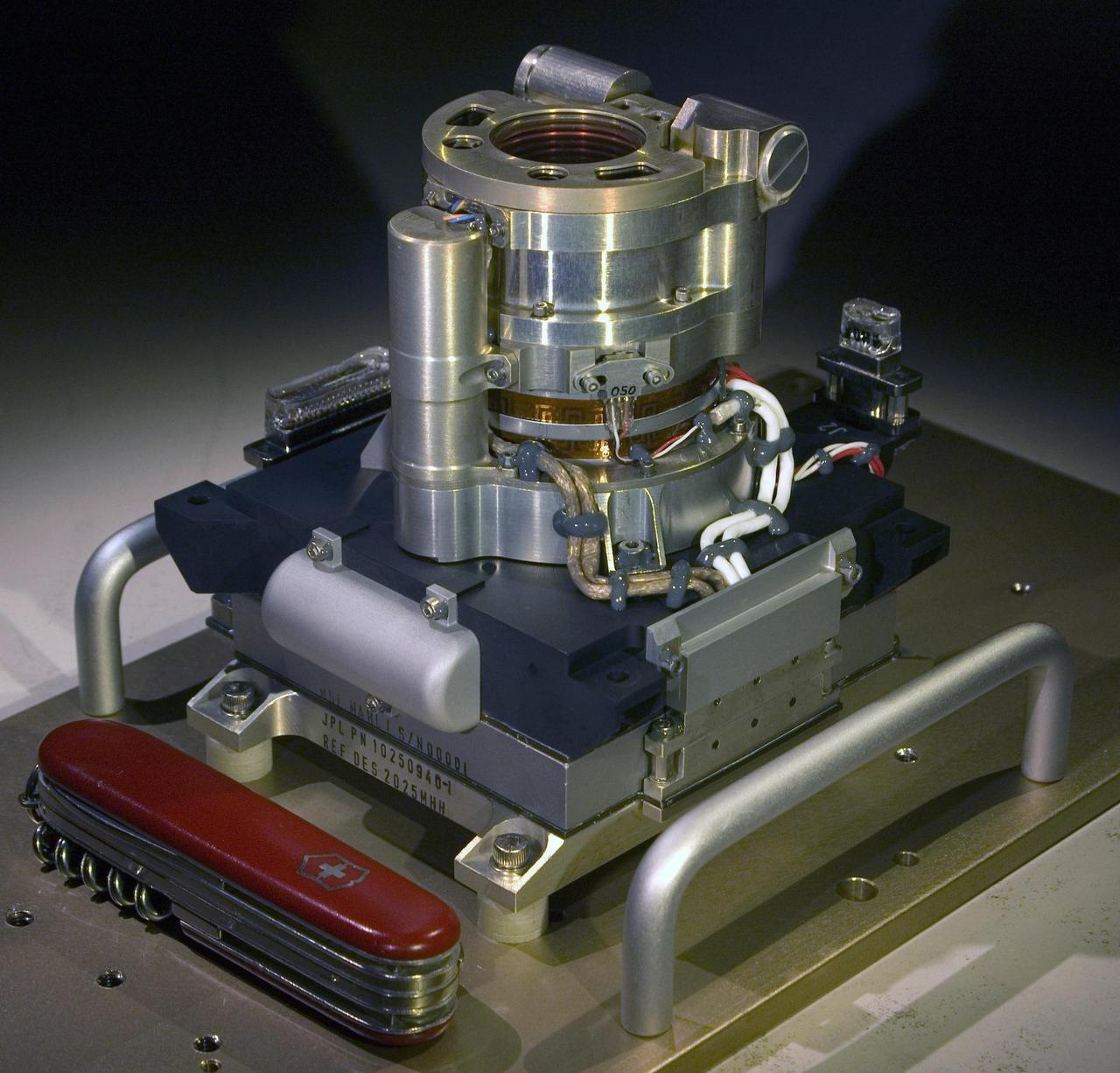
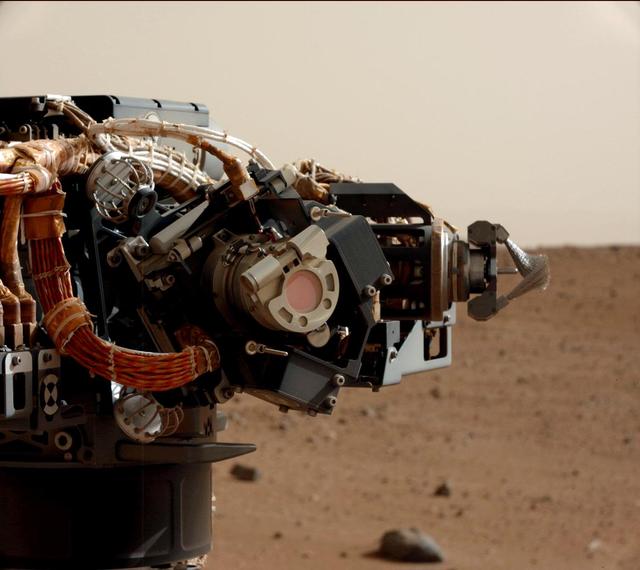
The Mars Hand Lens Imager MAHLI camera will fly on NASA Mars Science Laboratory mission, launching in late 2011. This photo of the camera was taken before MAHLI November 2010 installation onto the robotic arm of the mission Mars rover, Curiosity.
NASA Curiosity rover used the Mars Hand Lens Imager MAHLI to capture the set of thumbnail images stitched together to create this full-color self-portrait.

The left-front wheel of NASA Curiosity Mars rover shows dents and holes in this image taken by the MAHLI camera, which is mounted at the end of Curiosity robotic arm.

This view of terrestrial rocks was taken by a testing twin -- the life test unit -- of Mars Hand Lens Imager MAHLI camera on NASA Mars Science Laboratory.
The team operating NASA Curiosity Mars rover uses the Mars Hand Lens Imager MAHLI camera on the rover arm to check the condition of the wheels at routine intervals.

As the last step in a series of inspections of the Mars Hand Lens Imager MAHLI aboard NASA Mars rover Curiosity, this camera reclosable dust cover was opened for the first time on Sept. 8, 2012.
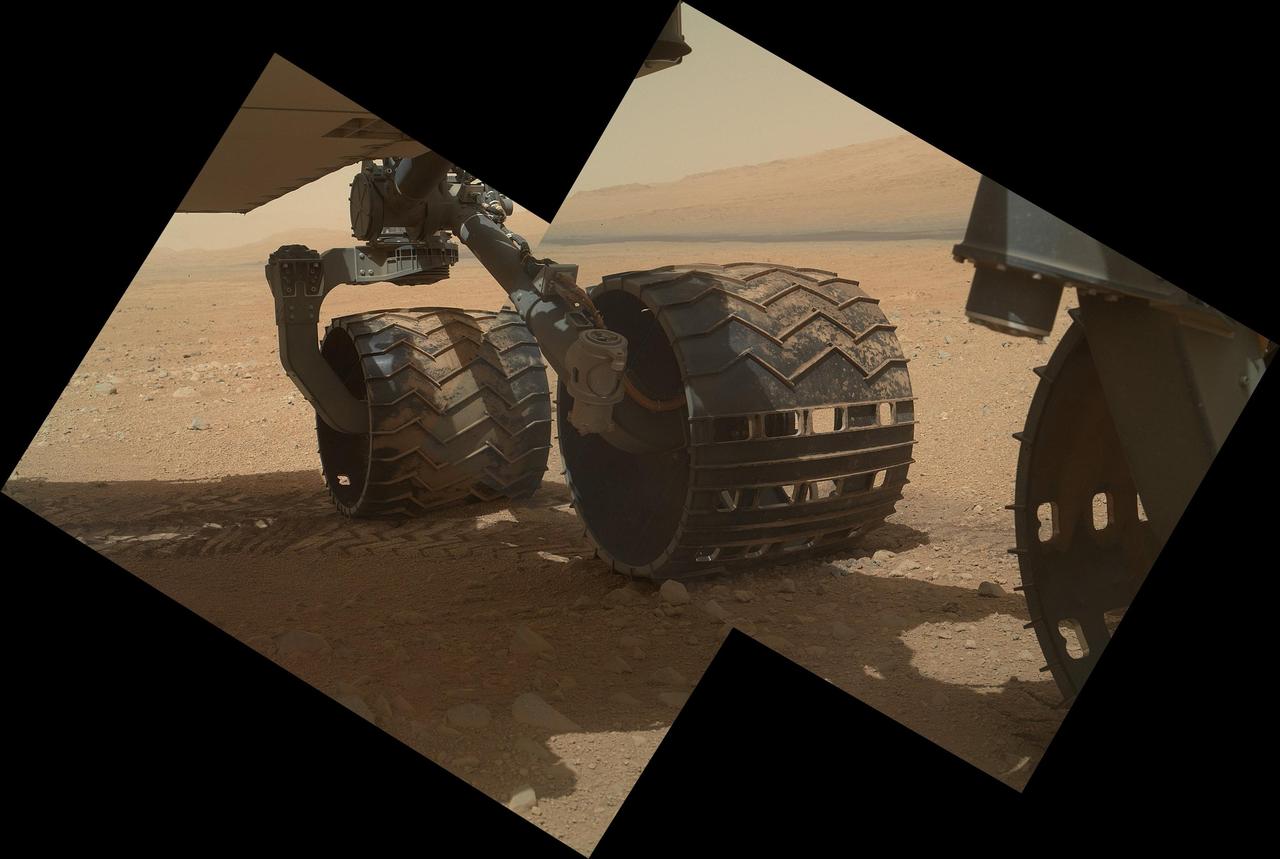
This view of the three left wheels of NASA Mars rover Curiosity combines two images that were taken by the rover Mars Hand Lens Imager MAHLI during the 34th Martian day, or sol, on Mars Sept. 9, 2012.

An in-flight camera check produced this out-of-focus image when NASA Mars Science Laboratory spacecraft turned on illumination sources that are part of the Curiosity rover Mars Hand Lens Imager MAHLI instrument.

After an activity called the mini drill test by NASA Mars rover Curiosity, the rover MAHLI camera recorded this view of the results. The test generated a ring of powdered rock for inspection in advance of the rover first full drilling.

NASA Mars rover Curiosity held its MAHLI camera about 10.5 inches 27 centimeters away from the top of a rock called Bathurst Inlet for a set of eight images combined into this merged-focus view of the rock.

This focus-merge image from the Mars Hand Lens Imager MAHLI on the arm of NASA Mars rover Curiosity shows a rock called Burwash. The rock has a coating of dust on it. The coarser, visible grains are windblown sand.
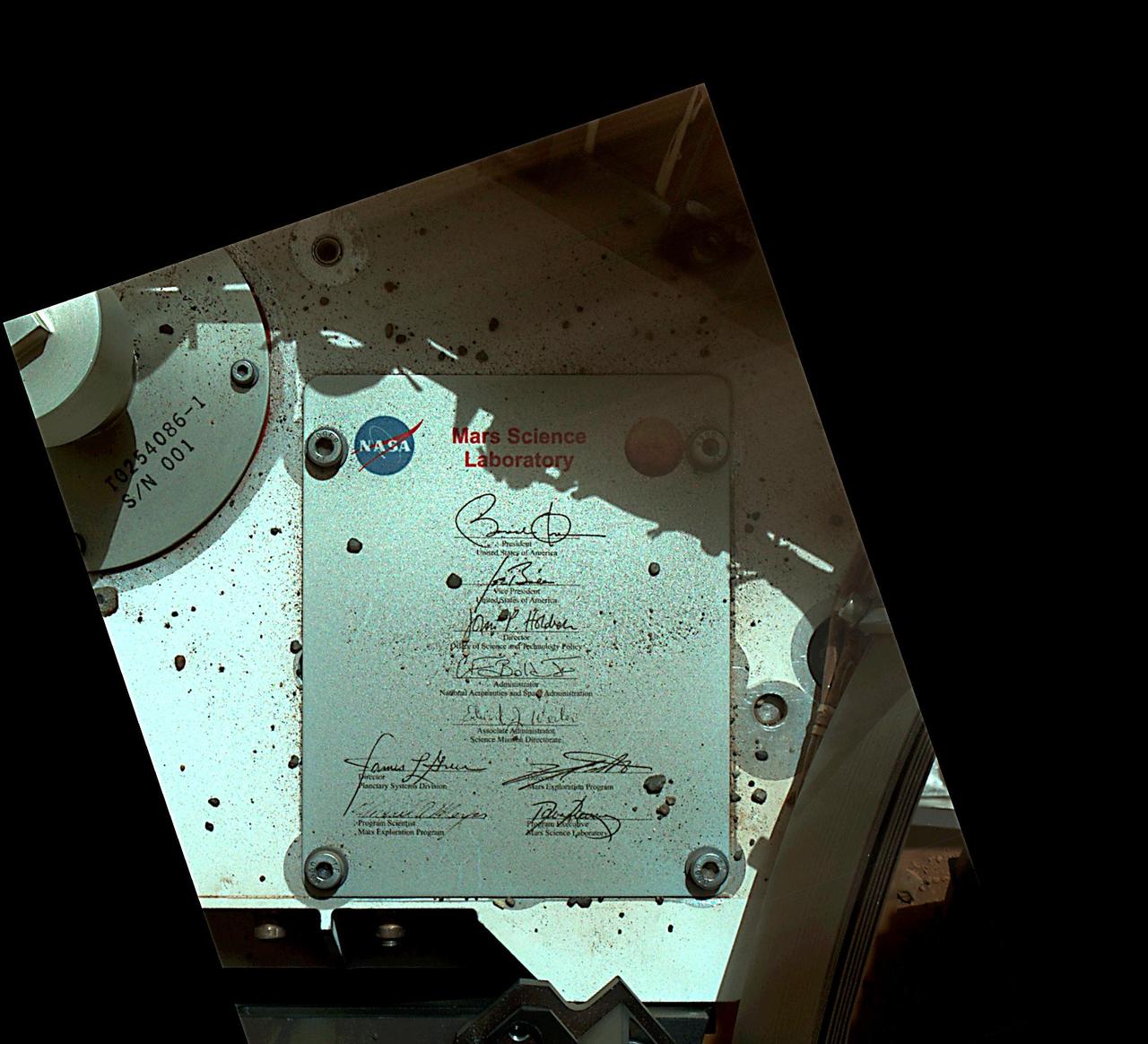
This view of Curiosity deck shows a plaque bearing several signatures of US officials, including that of President Obama and Vice President Biden. The image was taken by the rover Mars Hand Lens Imager MAHLI.
This image taken by the Mars Hand Lens Imager MAHLI on NASA Mars rover Curiosity shows the texture of the patch of flat-lying bedrock called Cumberland, which was the mission second target for use of the rover sample-collecting drill.

This image from the Mars Hand Lens Imager MAHLI camera on NASA Curiosity Mars rover shows the first sample-collection hole drilled in Mount Sharp, the layered mountain that is the science destination of the rover extended mission.
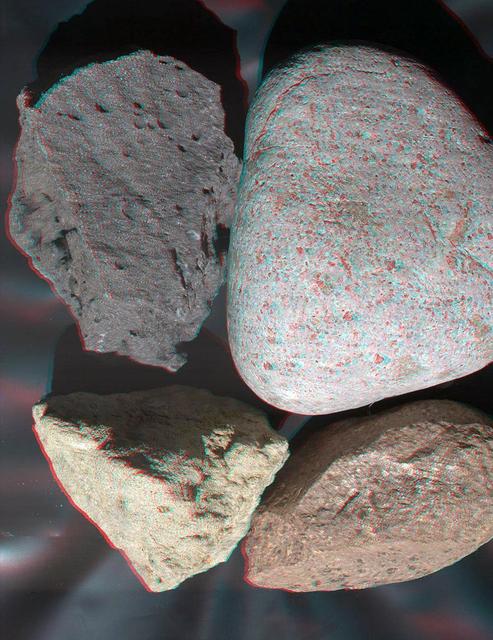
This stereo view of terrestrial rocks combines two images taken by a testing twin of the Mars Hand Lens Imager MAHLI camera on NASA Mars Science Laboratory. 3D glasses are necessary to view this image.

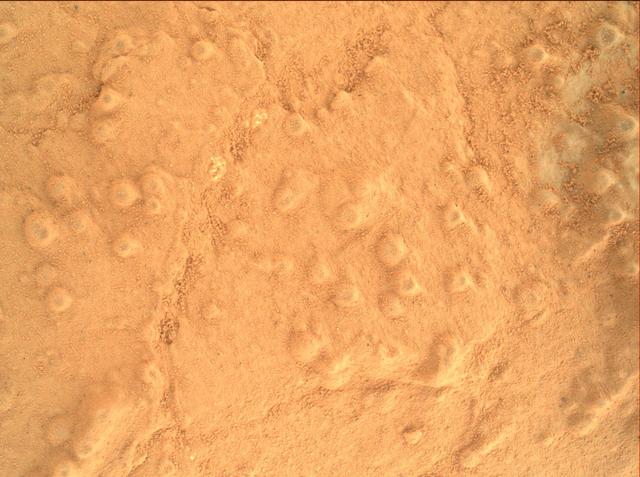
This image from the Mars Hand Lens Imager MAHLI camera on NASA Curiosity Mars rover shows an example of a type of geometrically distinctive feature that researchers are using Curiosity to examine at a mudstone outcrop at the base of Mount Sharp.

This image from the Mars Hand Lens Imager MAHLI on NASA Mars rover Curiosity shows details of rock texture and color in an area where the rover Dust Removal Tool DRT brushed away dust that was on the rock.

This image from the MAHLI camera on NASA Mars rover Curiosity shows details of rock texture and color in an area where the rover Dust Removal Tool DRT brushed away dust that was on the rock.

This view of grains from a sand dune near Christmas Lake, Ore., was taken by a testing twin of Mars Hand Lens Imager MAHLI camera on NASA Mars Science Laboratory.
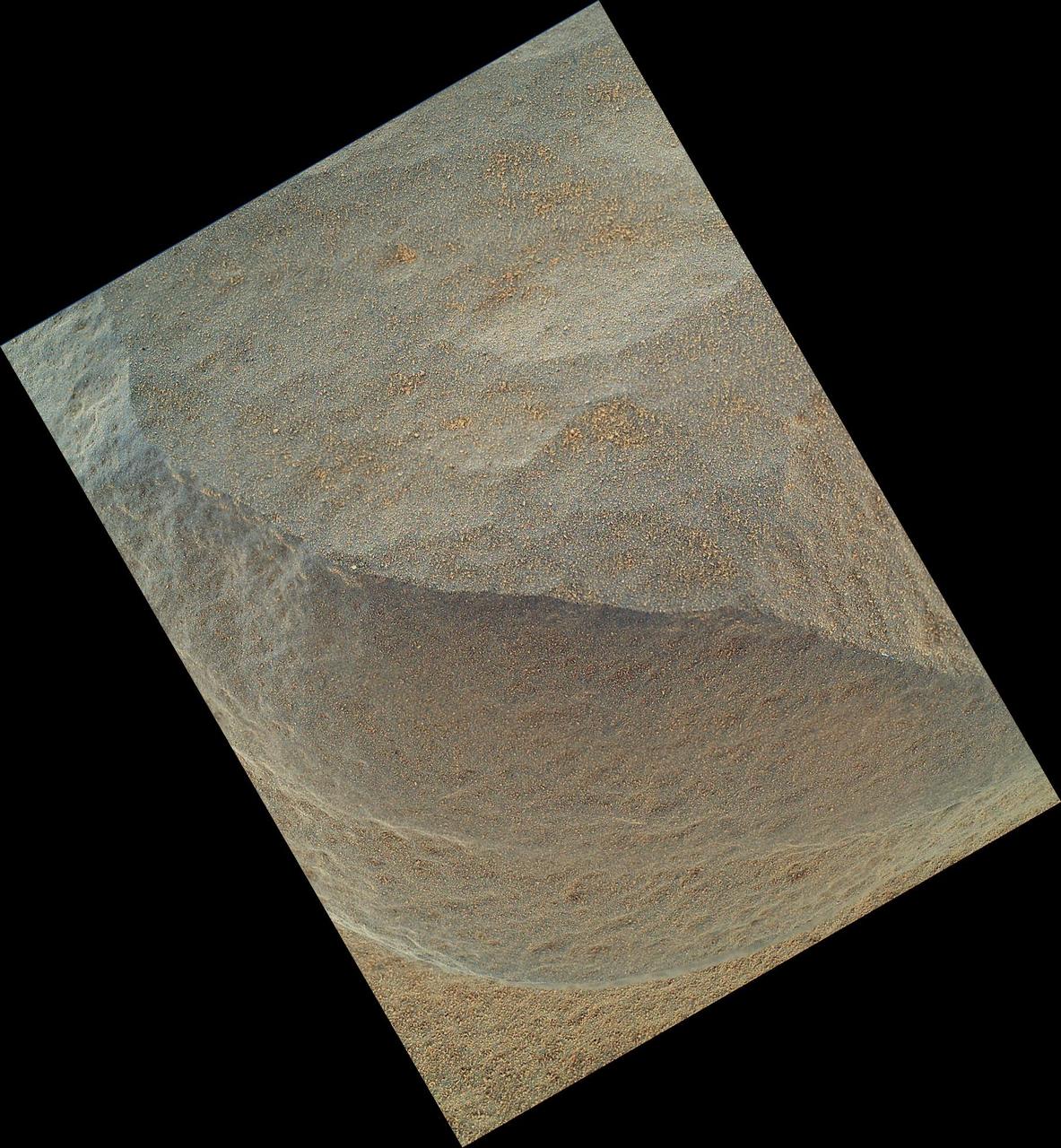
The MAHLI camera on NASA Curiosity rover is carried at an angle when the rover arm is stowed for driving. Still, the camera is able to record views of the terrain Curiosity is crossing in Gale Crater.
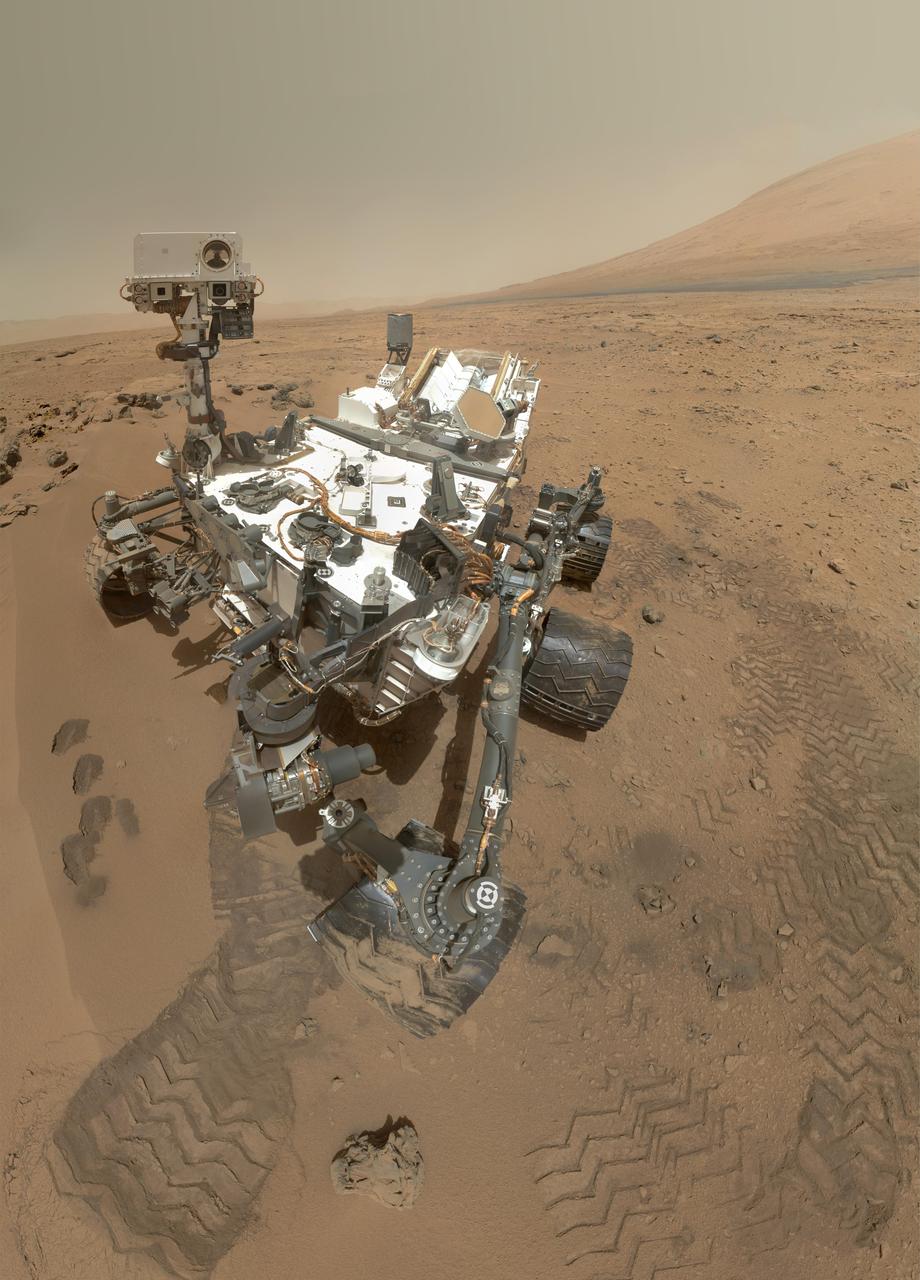
NASA Curiosity rover used its Mars Hand Lens Imager MAHLI to capture a set of 55 high-resolution images, which were stitched together to create a full-color self-portrait.
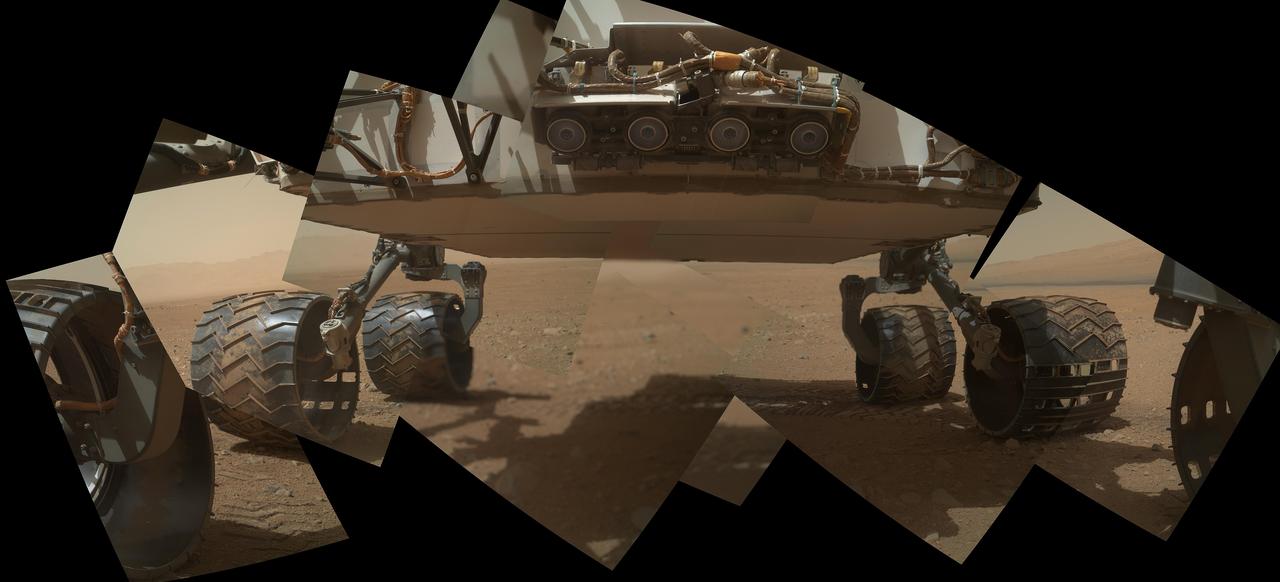
This view of the lower front and underbelly areas of NASA Mars rover Curiosity combines nine images taken by the rover MAHLI camera during the 34th Martian day, or sol, of Curiosity work on Mars.
NASA Curiosity Mars rover used the MAHLI camera at the end of its arm in April and May 2014 to take dozens of component images combined into this self-portrait where the rover drilled into a sandstone target called Windjana.
This image combines photographs taken by the Mars Hand Lens Imager MAHLI at three different distances from the first Martian rock that NASA Curiosity rover touched with its arm.
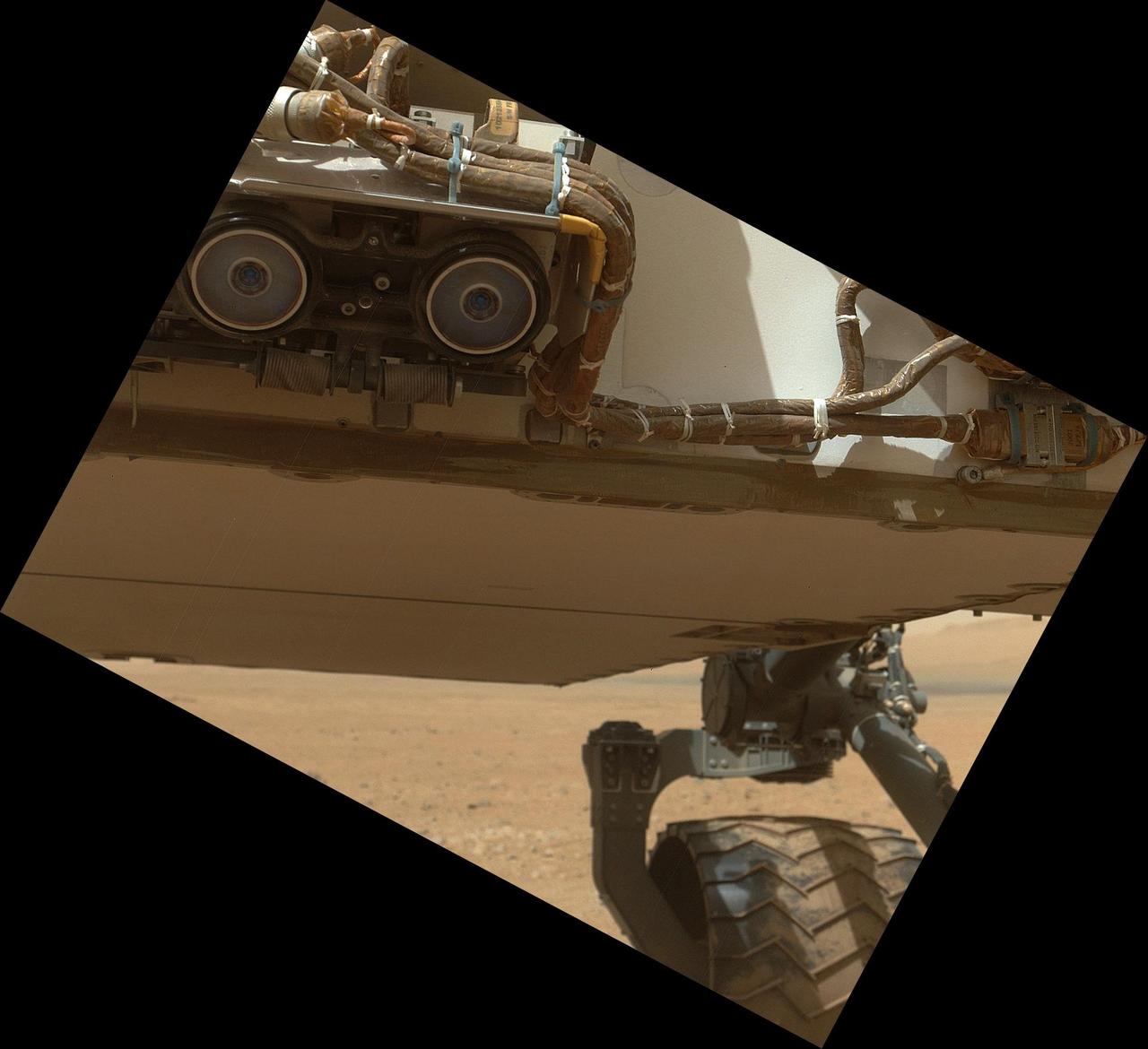
This view of the lower front and underbelly areas of NASA Mars rover Curiosity was taken by the rover MAHLI camera during Sept. 9, 2012. Also visible are the hazard avoidance cameras on the front of the rover.
On Sol 32 Sept. 7, 2012 the Curiosity rover used a camera located on its arm to obtain this self portrait. The MAHLI cover was in the closed position in order to inspect the the dust cover.

This image taken by the MAHLI camera shows a sample of basaltic rock from a lava flow in New Mexico serves as a calibration target carried on the front of NASA Mars rover Curiosity for the rover Canadian-made APXS instrument.
NASA's Curiosity Mars rover has used the drill on its robotic arm to take 32 rock samples to date. The Mars Hand Lens Imager (MAHLI), a camera on the end of the robotic arm, provided the images in this mosaic. https://photojournal.jpl.nasa.gov/catalog/PIA24764
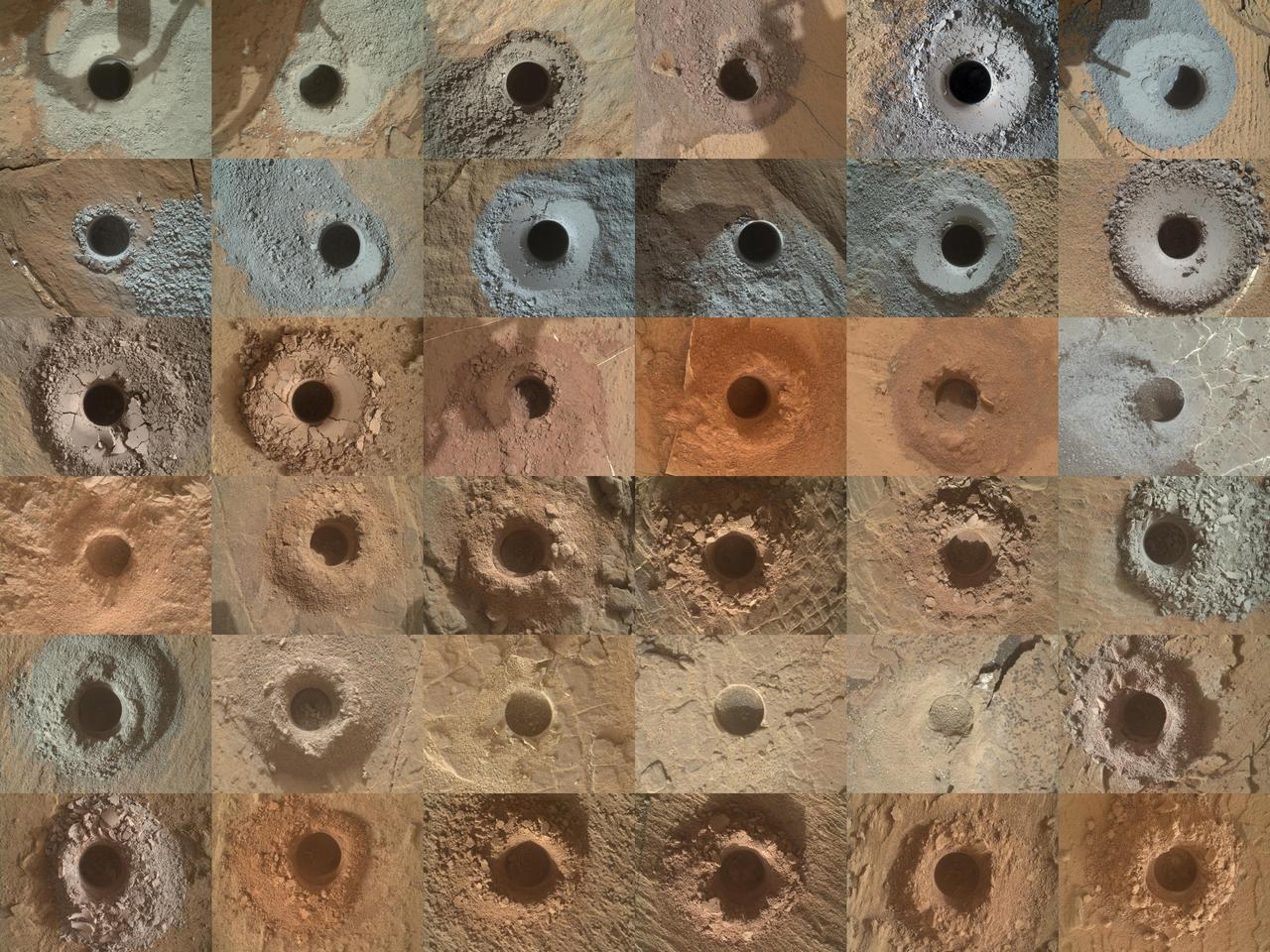
NASA's Curiosity Mars rover has collected 36 powderized rock samples with the drill on the end of its robotic arm. This grid shows all 36 holes to date. The images in the grid were captured by the Mars Hand Lens Imager (MAHLI) on the end of Curiosity's arm. https://photojournal.jpl.nasa.gov/catalog/PIA25416

The Mars Hand Lens Imager MAHLI camera at the end of the robotic arm of NASA Curiosity rover will use a calibration target attached to a shoulder joint of the arm.

NASA Curiosity Mars rover used the Mars Hand Lens Imager MAHLI camera on its arm to catch the first images of sparks produced by the rover laser being shot at a rock on Mars. The left image is from before the laser zapped this rock, called Nova.
The left eye of the Mast Camera Mastcam on NASA Mars rover Curiosity took this image of the camera on the rover arm, the Mars Hand Lens Imager MAHLI, during the 30th Martian day, or sol, of the rover mission on Mars Sept. 5, 2012.
This view of the calibration target for the MAHLI camera aboard NASA Mars rover Curiosity combines two images taken by that camera during Sept. 9, 2012. Part of Curiosity left-front and center wheels and a patch of Martian ground are also visible.
This rectangular version of a self-portrait of NASA Mars rover Curiosity combines dozens of exposures taken by the rover Mars Hand Lens Imager MAHLI during the 177th Martian day, or sol, of Curiosity work on Mars Feb. 3, 2013.
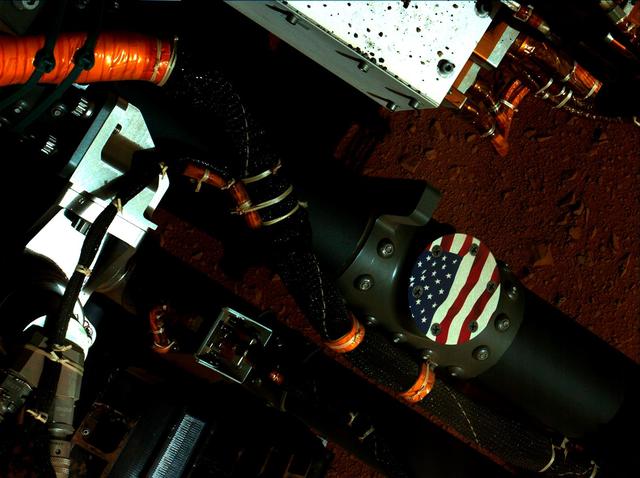
This view of the American flag medallion on NASA Mars rover Curiosity was taken by the rover MAHLI camera during the 44th Martian sol on Sept. 19, 2012. The flag is one of four mobility logos placed on the rover mobility rocker arms.
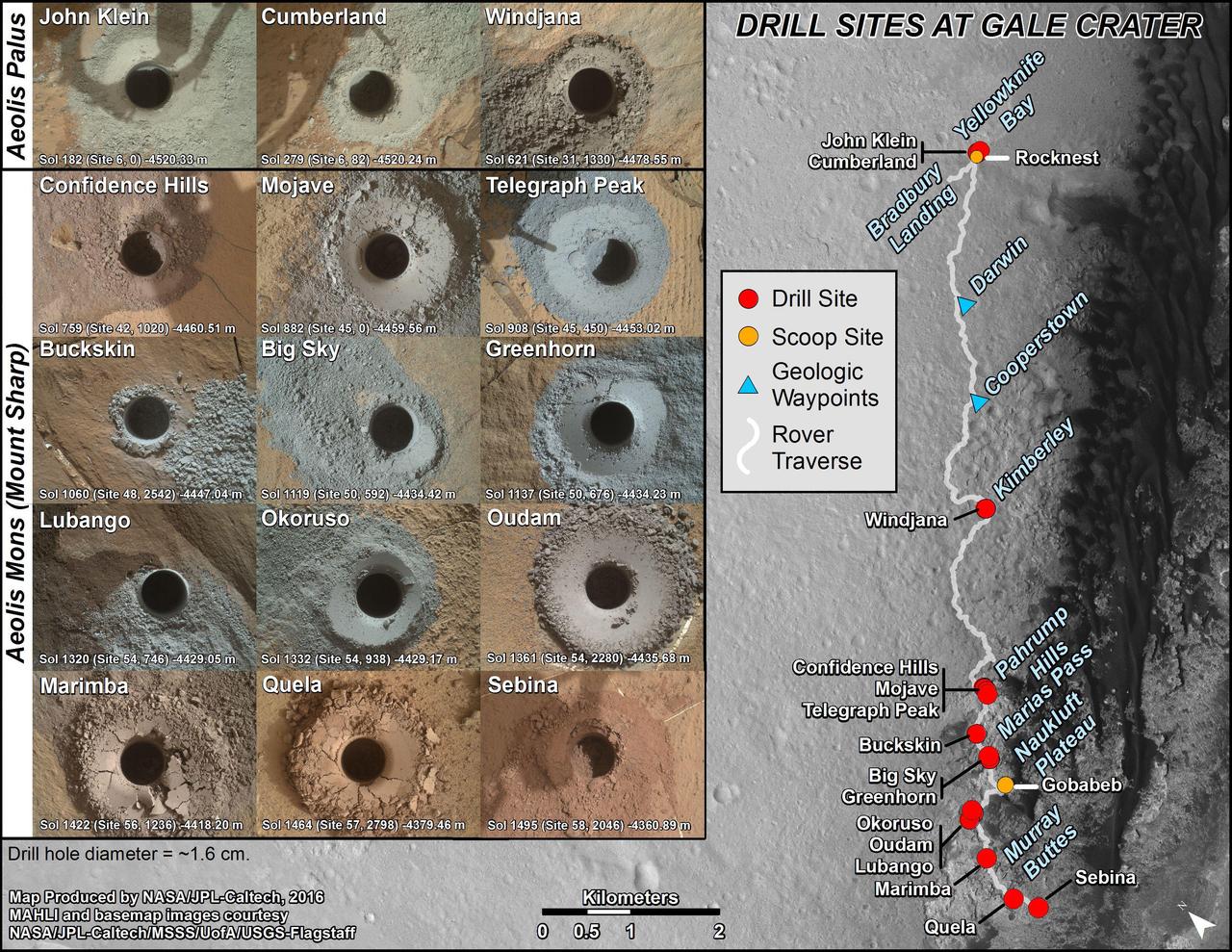
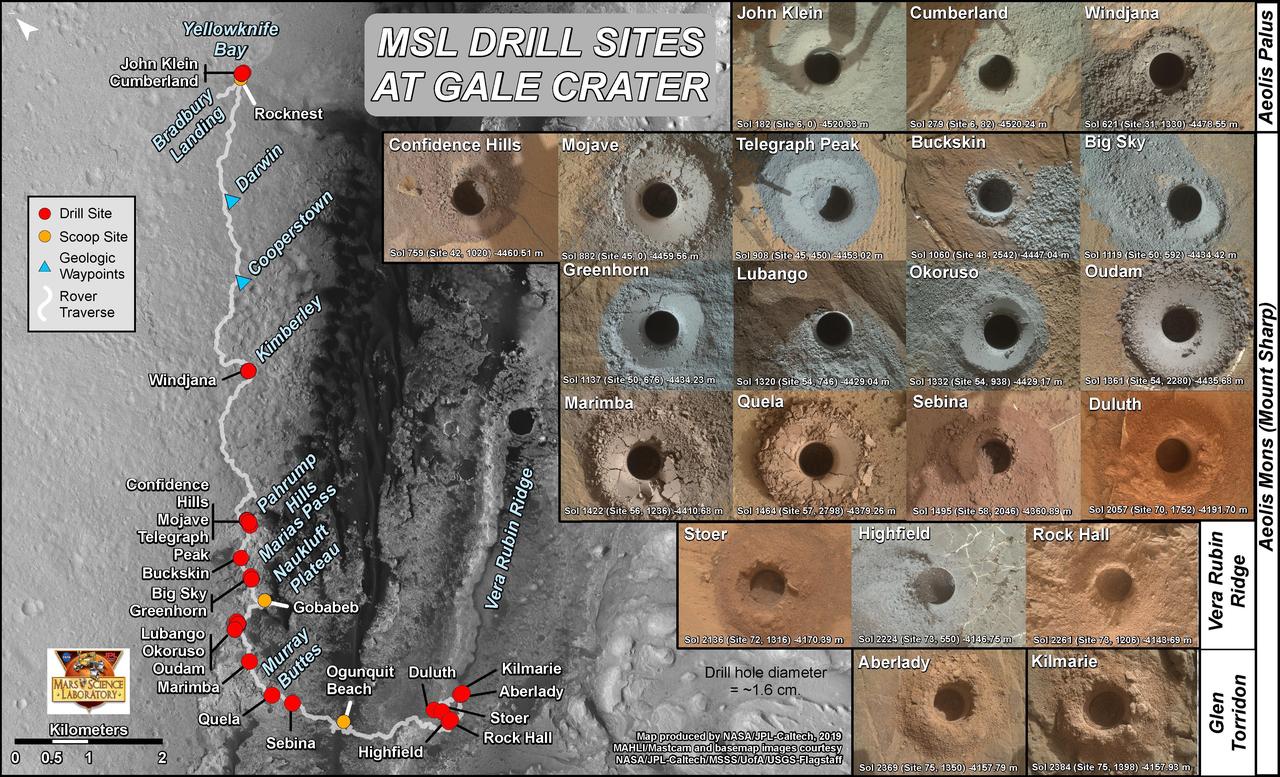
nal Caption Released with Image: This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its first 19 rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 15 rock-powder samples were acquired. Curiosity scooped two soil samples at each of the other two sites: Rocknest and Gobabeb. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward the upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. The latest sample site included is "Sebina,"where Curiosity drilled into bedrock of the Murray formation on Oct. 20, 2016, during the 1,495th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). The drilling dates for the first 13 rock samples collected are, by location: "John Klein" on Feb. 8, 2013 (Sol 182); "Cumberland" on May 19, 2013 (Sol 279); "Windjana" on May 5, 2014 (Sol 621); "Confidence Hills" on Sept. 24, 2014 (Sol 759); "Mojave" on Jan. 29, 2015 (Sol 882); "Telegraph Peak" on Feb. 24, 2015 (Sol 908); "Buckskin" on July 30, 2015 (Sol 1060); "Big Sky" on Sept. 29, 2015 (Sol 1119); "Greenhorn" on Oct. 18, 2015 (Sol 1137); "Lubango" on April 23, 2016 (Sol 1320); "Okoruso" on May 5, 2016 (Sol 1332); "Oudam" on June 4, 2016 (Sol 1361); "Quela" on Sept. 18, 2016 (Sol 1464). http://photojournal.jpl.nasa.gov/catalog/PIA21254

This image from the Mars Hand Lens Imager MAHLI on NASA Mars rover Curiosity shows the rock target Cumberland before and after Curiosity drilled into it to collect a sample for analysis.

This mosaic of images shows layers of ancient sediment on a boulder-sized rock called "Strathdon," as seen by the Mars Hand Lens Imager (MAHLI) camera on the end of the robotic arm on NASA's Curiosity rover. The images were taken on July 10, 2019, the 2,462nd Martian day, or sol, of the mission. The images were acquired from about 4 inches (10 centimeters) away and processed to adjust brightness and remove blemishes. https://photojournal.jpl.nasa.gov/catalog/PIA23347
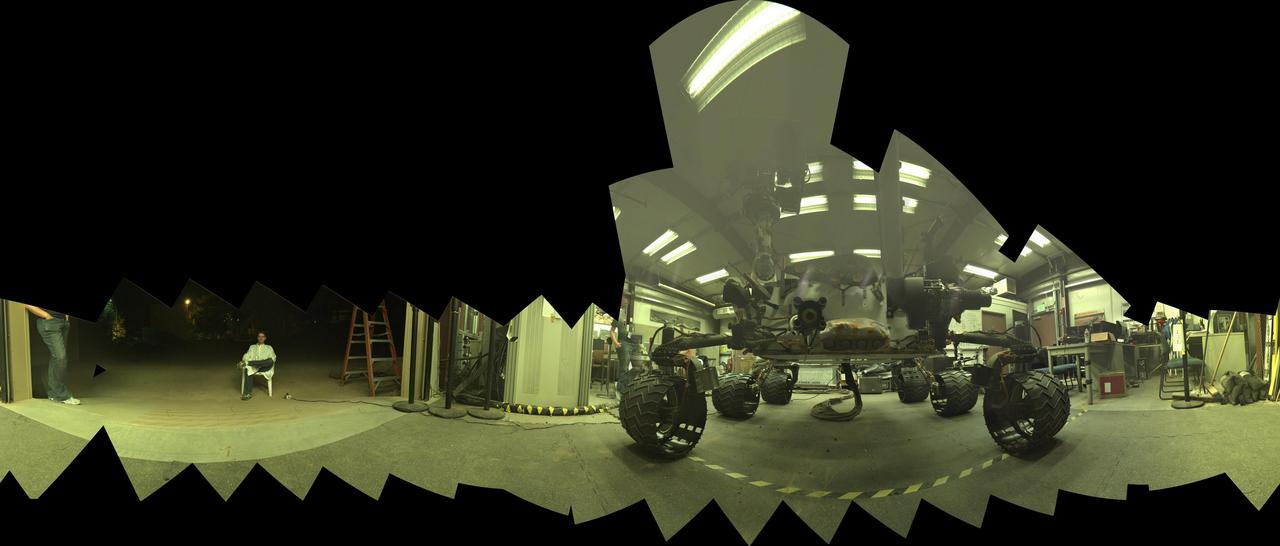
This view of a test rover at NASA's Jet Propulsion Laboratory, Pasadena, California, results from advance testing of arm positions and camera pointings for taking a low-angle self-portrait of NASA's Curiosity Mars rover. This rehearsal in California led to a dramatic Aug. 5, 2015, selfie of Curiosity, online at PIA19807. Curiosity's arm-mounted Mars Hand Lens Imager (MAHLI) camera took 92 of component images that were assembled into that mosaic. The rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This practice version was taken at JPL's Mars Yard in July 2013, using the Vehicle System Test Bed (VSTB) rover, which has a test copy of MAHLI on its robotic arm. MAHLI was built by Malin Space Science Systems, San Diego. JPL, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19810

Ken Edgett, principal investigator, MAHLI Camera, Mars Exploration Program, discusses what we’ve learned from Curiosity and the other Mars rovers during a “Mars Up Close” panel discussion, Tuesday, August 5, 2014, at the National Geographic Society headquarters in Washington. Photo Credit: (NASA/Bill Ingalls)

Ken Edgett, principal investigator, MAHLI Camera, Mars Exploration Program, discusses what we’ve learned from Curiosity and the other Mars rovers during a “Mars Up Close” panel discussion, Tuesday, August 5, 2014, at the National Geographic Society headquarters in Washington. Photo Credit: (NASA/Bill Ingalls)

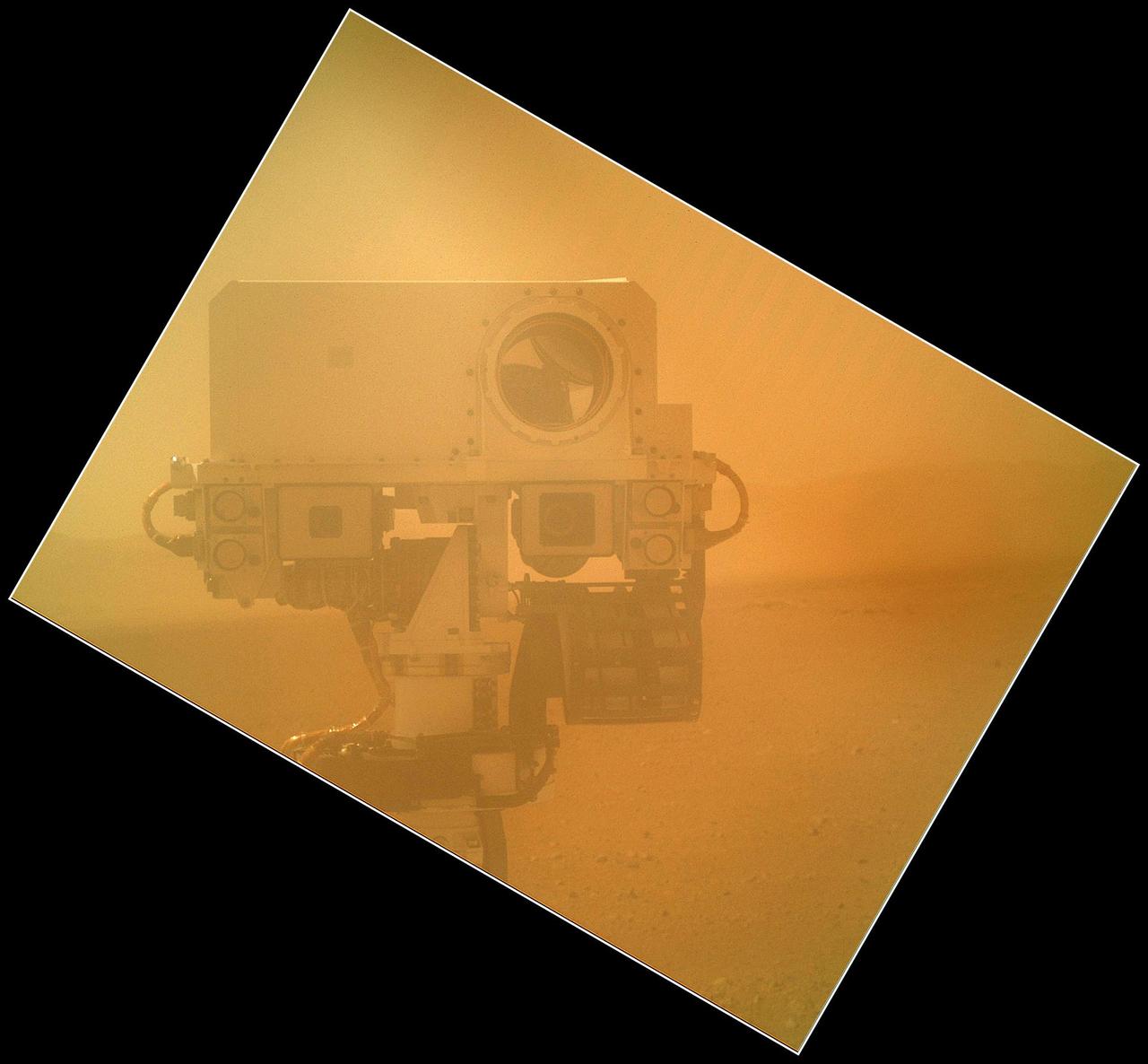
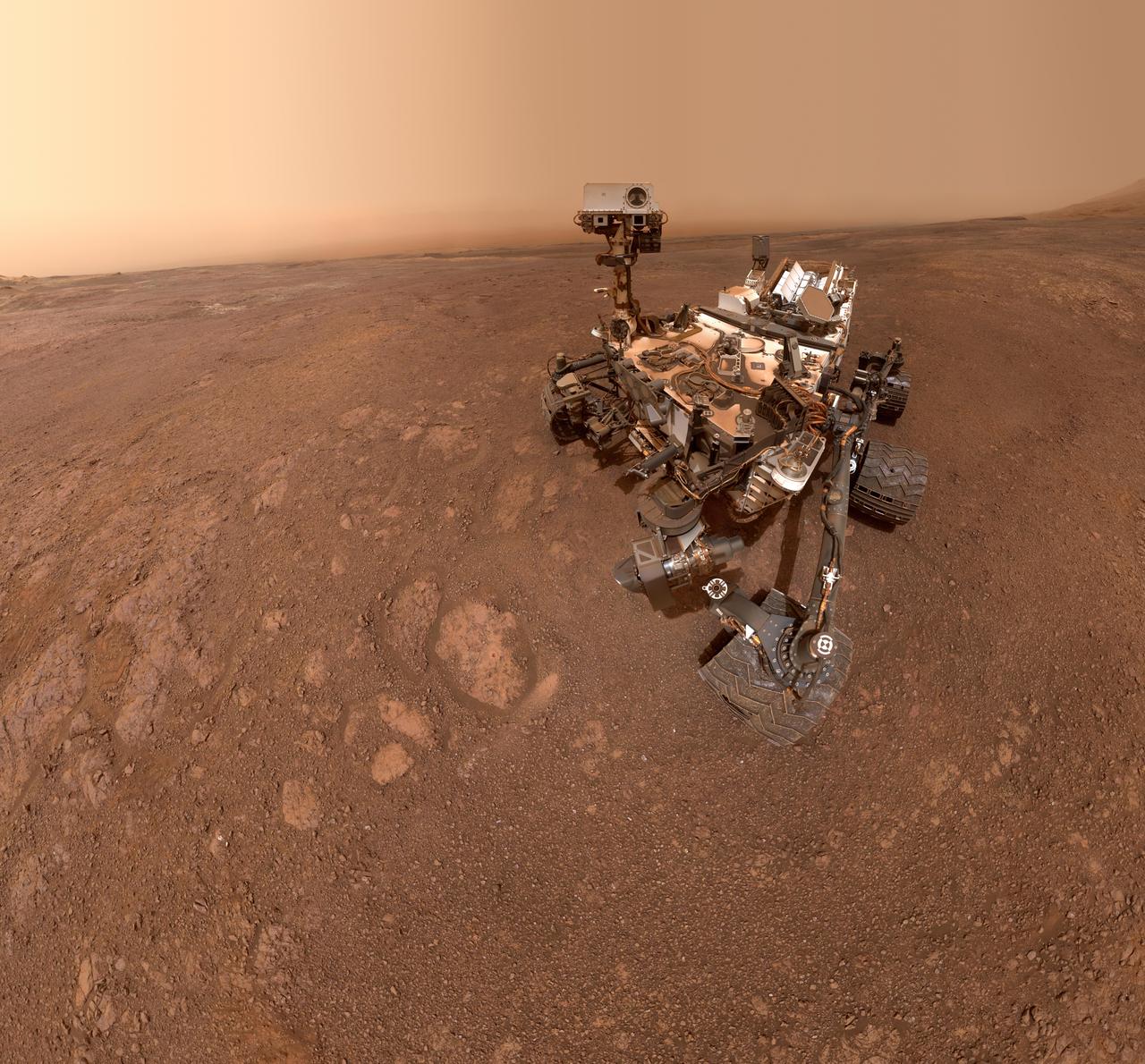
A self-portrait of NASA's Curiosity rover taken on Sol 2082 (June 15, 2018). A Martian dust storm has reduced sunlight and visibility at the rover's location in Gale Crater. Self-portraits are created using images taken by Curiosity's Mars Hands Lens Imager (MAHLI). https://photojournal.jpl.nasa.gov/catalog/PIA22486

The dark, stick-shaped features clustered on this Martian rock are about the size of grains of rice. This is a focus-merged view from the Mars Hand Lens Imager (MAHLI) camera on NASA's Curiosity Mars rover. It covers an area about 2 inches (5 centimeters) across. The focus-merged product was generated autonomously by MAHLI combining the in-focus portions of a few separate images taken at different focus settings on Jan. 1, 2018, during the 1,922nd Martian day, or sol, of Curiosity's work on Mars. This rock target, called "Haroldswick," is near the southern, uphill edge of "Vera Rubin Ridge" on lower Mount Sharp. The origin of the stick-shaped features is uncertain. One possibility is that they are erosion-resistant bits of dark material from mineral veins cutting through rocks in this area. https://photojournal.jpl.nasa.gov/catalog/PIA22213

NASA's Curiosity Mars rover used its Mars Hand Lens Imager (MAHLI), a camera on the end of its robotic arm, to view this wind-eroded rock shaped like a piece of coral on July 24, 2025, the 4,608th Martian day, or sol, of the mission. Nicknamed "Paposo" by the rover's science team, the rock was about 2 inches (5 centimeters) from the MAHLI camera when this was taken. Curiosity has found many small features like this one, which formed billions of years ago when liquid water still existed on Mars. Water carried dissolved minerals into rock cracks and later dried, leaving the hardened minerals behind. Eons of sandblasting by the wind wore away the surrounding rock, producing unique shapes. This common process is seen extensively on Earth and has produced fantastic shapes on Mars, as well, including a flower-shaped rock. https://photojournal.jpl.nasa.gov/catalog/PIA26633
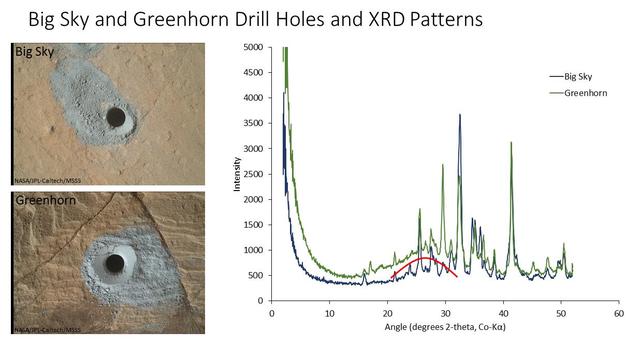
The graph at right presents information from the NASA Curiosity Mars rover's onboard analysis of rock powder drilled from the "Big Sky" and "Greenhorn" target locations, shown at left. X-ray diffraction analysis of the Greenhorn sample inside the rover's Chemistry and Mineralogy (CheMin) instrument revealed an abundance of silica in the form of noncrystalline opal. The broad hump in the background of the X-ray diffraction pattern for Greenhorn, compared to Big Sky, is diagnostic of opal. The image of Big Sky at upper left was taken by the rover's Mars Hand Lens Imager (MAHLI) camera the day the hole was drilled, Sept. 29, 2015, during the mission's 1,119th Martian day, or sol. The Greenhorn hole was drilled, and the MAHLI image at lower left was taken, on Oct. 18, 2015 (Sol 1137). http://photojournal.jpl.nasa.gov/catalog/PIA20272
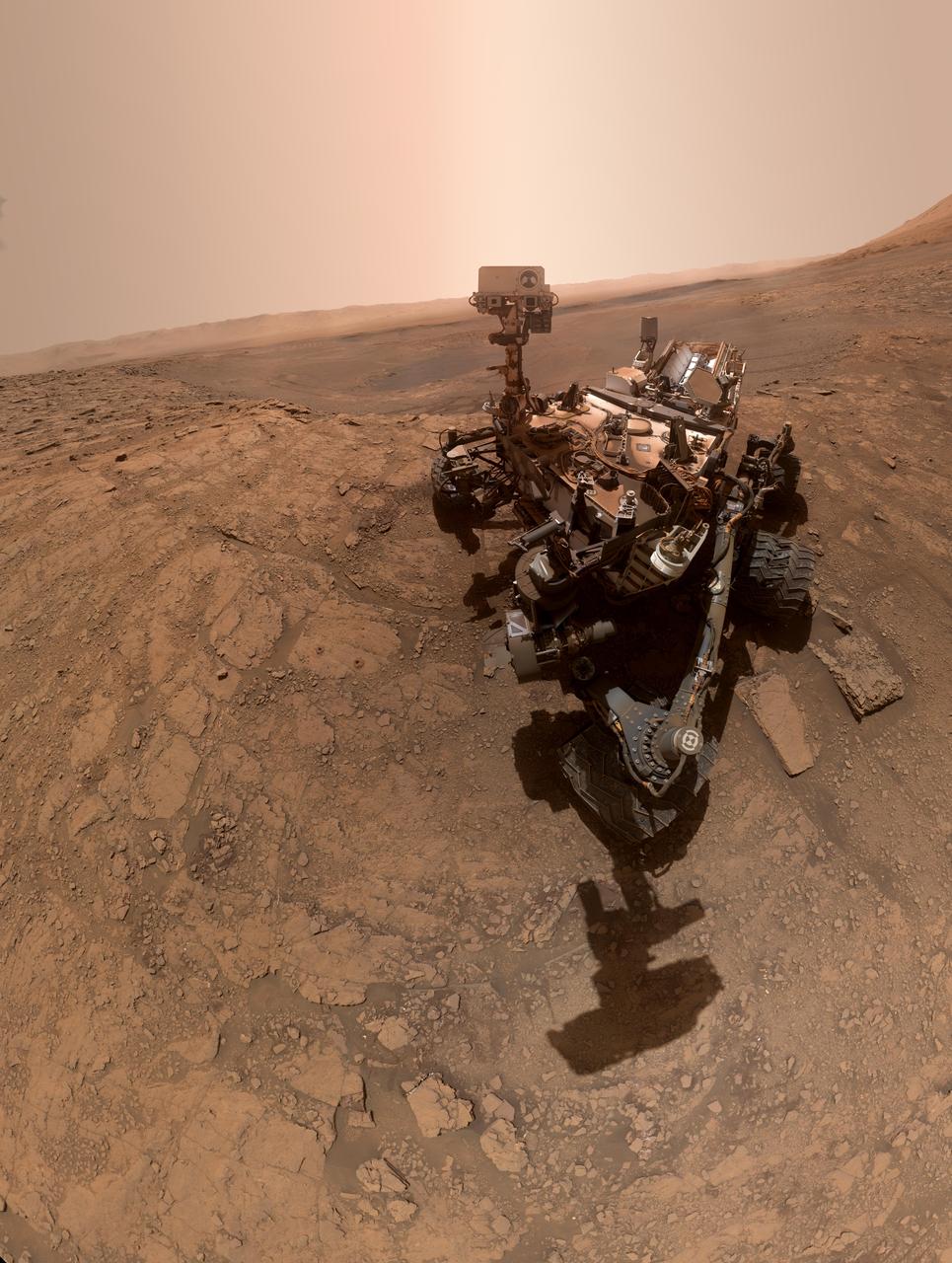
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Quela" drilling location in the "Murray Buttes" area on lower Mount Sharp. Key features on the skyline of this panorama are the dark mesa called "M12" to the left of the rover's mast and pale, upper Mount Sharp to the right of the mast. The top of M12 stands about 23 feet (7 meters) above the base of the sloping piles of rocks just behind Curiosity. The scene combines approximately 60 images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover's robotic arm. Most of the component images were taken on Sept. 17, 2016, during the 1,463rd Martian day, or sol, of Curiosity's work on Mars. Two component images of the drill-hole area in front of the rover were taken on Sol 1466 (Sept. 20) to show the hole created by collecting a drilled sample at Quela on Sol 1464 (Sept. 18). The skyline sweeps from west on the left to south-southwest on the right, with the rover's mast at northeast. The rover's location when it recorded this scene was where it ended a drive on Sol 1455, mapped at http://mars.nasa.gov/msl/multimedia/images/?ImageID=8029. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at other sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390"), "Buckskin" (PIA19808) and "Gobabeb" (PIA20316). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. http://photojournal.jpl.nasa.gov/catalog/PIA20844
This self-portrait of NASA's Curiosity Mars rover shows the vehicle on Vera Rubin Ridge, which it's been investigating for the past several months. Directly behind the rover is the start of a clay-rich slope scientists are eager to begin exploring. In the coming week, Curiosity will begin to climb this slope. North is on the left and west is on the right, with Gale Crater's rim on the horizon of both edges. Poking up just behind Curiosity's mast is Mount Sharp, photobombing the robot's selfie. Curiosity landed on Mars five years ago with the intention of studying lower Mount Sharp, where it will remain for all of its time on Mars. The mountain's base provides access to layers formed over millions of years. These layers formed in the presence of water -- likely due to a lake or lakes that sat at the bottom of the mountain, which sits inside of Gale Crater. This mosaic was assembled from dozens of images taken by Curiosity's Mars Hands Lens Imager (MAHLI). They were all taken on Jan. 23, 2018, during Sol 1943. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. A full-resolution image is available at https://photojournal.jpl.nasa.gov/catalog/PIA22207
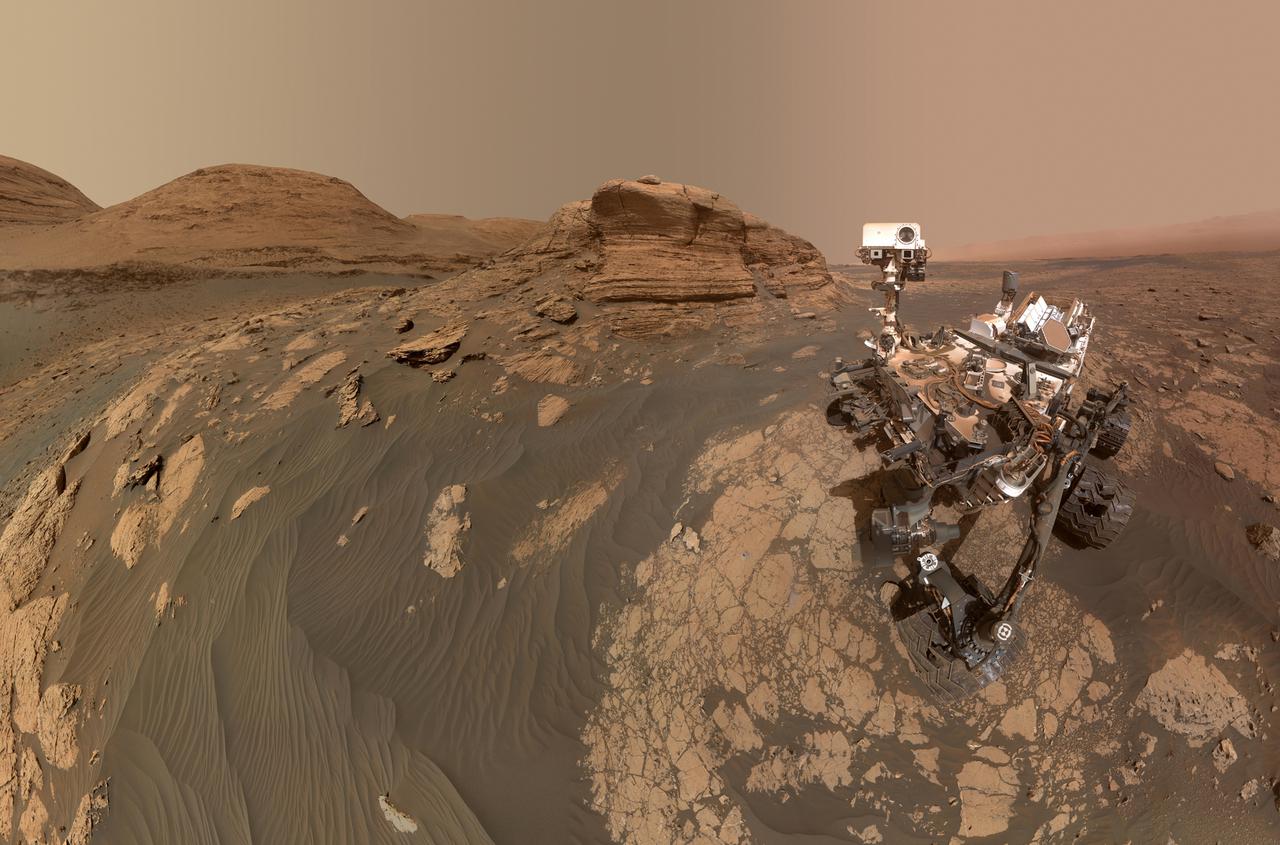
NASA's Curiosity Mars rover used two different cameras to create this selfie in front of Mont Mercou, a rock outcrop that stands 20 feet (6 meters) tall. The panorama is made up of 60 images taken by the Mars Hand Lens Imager (MAHLI) on the rover's robotic arm on March 26, 2021, the 3070th Martian day, or sol, of the mission. These were combined with 11 images taken by the Mastcam on the mast, or "head," of the rover on March 16, 2021, the 3,060th Martian day of the mission. The hole visible to the left of the rover is where its robotic drill sampled a rock nicknamed "Nontron." The Curiosity team is nicknaming features in this part of Mars using names from the region around the village of Nontron in southwestern France. https://photojournal.jpl.nasa.gov/catalog/PIA24543

NASA's Curiosity Mars rover took this close-up view of a rock nicknamed "Terra Firme" that looks like the open pages of a book, on April 15, 2023, the 3,800th Martian day, or sol, of the mission, using the Mars Hand Lens Imager (MAHLI) on the end of its robotic arm. The rock is about an inch across (2.5 centimeters). Rocks with unusual shapes are common on Mars, and often were formed by water seeping through cracks in a rock in the ancient past, bringing harder minerals along with them. After eons of being sand-blasted by the wind, softer rock is carved away and the harder materials are all that's left. https://photojournal.jpl.nasa.gov/catalog/PIA25828

Smaller than a penny, the flower-like rock artifact on the left was imaged by NASA's Curiosity Mars rover using its Mars Hand Lens Imager (MAHLI) camera on the end of its robotic arm. The image was taken on Feb. 24, 2022, the 3,396th Martian day, or sol, of the mission. The "flower," along with the spherical rock artifacts seen to the right, were made in the ancient past when minerals carried by water cemented the rock. Figure 1 shows a tighter view of the flower-like feature. Curiosity has in the past discovered a diverse assortment of similar small features that formed when mineralizing fluids traveled through conduits in the rock. Images of such features are helping scientists understand more about the prolonged history of liquid water in Gale Crater. https://photojournal.jpl.nasa.gov/catalog/PIA25077
This selfie was taken by NASA's Curiosity Mars rover on Feb. 26, 2020 (the 2,687th Martian day, or sol, of the mission). The crumbling rock layer at the top of the image is the Greenheugh Pediment, which Curiosity climbed soon after taking the image. Directly to the left of Curiosity's foremost wheel is a hole the rover drilled at a rock feature called "Hutton." The selfie includes 86 individual images taken by the Mars Hand Lens Imager (MAHLI) camera on the end of Curiosity's robotic arm. The images were then stitched into a panorama. https://photojournal.jpl.nasa.gov/catalog/PIA23624
NASA's Curiosity Mars rover took this selfie on May 12, 2019 (the 2,405th Martian day, or sol, of the mission). To the lower-left of the rover are its two recent drill holes, at targets called "Aberlady" and "Kilmarie." These are Curiosity's 20th and 21st drill sites. The selfie is composed of 57 individual images taken by the rover's Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are stitched together into a panorama, and the robotic arm is digitally removed. https://photojournal.jpl.nasa.gov/catalog/PIA23240

This view from the Mars Hand Lens Imager (MAHLI) on the arm of NASA's Curiosity Mars rover shows a combination of dark and light material within a mineral vein at a site called "Garden City" on lower Mount Sharp. The image was taken on April 4, 2015, during the 946th Martian day, or sol, of Curiosity's work on Mars. The area shown is roughly 1 inch (2.5 centimeters) wide. Differences in textures of light-toned veins in the Garden City complex of crisscrossing mineral veins are clues that these veins may result from distinct fluid events. This example shows where a later addition of light-toned material into a vein ripped up prior dark material, suggesting both high fluid pressure and potentially explosive release of high pressures. Different examples are at PIA19925 and PIA19926. Mineral veins often form where fluids move through fractured rocks, depositing minerals in the fractures and affecting chemistry of the surrounding rock. At Garden City, the veins have been more resistant to erosion than the surrounding host rock. The fluid movement through fractures at Garden City occurred later than wet environmental conditions in which the host rock formed, before it hardened and cracked. Malin Space Science Systems, San Diego, built and operates MAHLI. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19927

NASA’s Curiosity Mars rover used LED lights on the end of its robotic arm to create this rare nighttime view of the Red Planet’s surface on Dec. 6, 2025, the 4,740th Martian day, or sol, of the rover’s mission. The LED lights are part of the Mars Hand Lens Imager, or MAHLI, a camera on the end of Curiosity’s robotic arm. The image was captured by the Mast Camera, or Mastcam, on the rover’s mast, or “head.” On occasion, scientists have used MAHLI’s LED lights to illuminate areas deep in shadow during the day, such as the insides of drill holes and the inlet tubes leading to instruments in the rover’s belly. Much earlier in the mission, the Curiosity team used these LEDs at night to look for layering or other features in drill hole walls that would help them understand a rock’s composition. Since the mission changed its drilling method, the drill holes have come out too rough and dusty to see any such details. After drilling a rock target nicknamed “Nevado Sajama” on Nov. 13, 2025 (Sol 4,718), the team noticed the drill hole walls were smooth enough to try looking for layers and decided to try illuminating the drill hole at night. This drill hole was made during Curiosity’s exploration of a region full of geologic formations called boxwork, which crisscross the surface for miles and look like giant spiderwebs when viewed from space. Curiosity was built by NASA’s Jet Propulsion Laboratory, which is managed by Caltech in Pasadena, California. JPL leads the mission on behalf of NASA’s Science Mission Directorate in Washington as part of NASA’s Mars Exploration Program portfolio. Malin Space Science Systems in San Diego built and operates both Mastcam and MAHLI. To learn more about Curiosity, visit: science.nasa.gov/mission/msl-curiosity

This view from the Mars Hand Lens Imager (MAHLI) on the arm of NASA's Curiosity Mars rover is a close-up of a two-tone mineral vein at a site called "Garden City" on lower Mount Sharp. The area shown is roughly one inch (2.5 centimeters) wide. The image was taken at night, using illumination from MAHLI's light-emitting diodes, during the 935th Martian day, or sol, of Curiosity's work on Mars (March 25, 2015). The vein includes both light-toned and dark-toned materials. The whiter material appears to have ripped up and incorporated portions of both the darker vein material (black arrows in Figure 1) and a third material (white arrow in Figure 1). The Curiosity mission's examination of material in these veins may provide clues about multiple episodes of fluids moving through fractured rock at this site. The fluid movement through fractures occurred later than wet environmental conditions in which the host rock formed, before it hardened and cracked. http://photojournal.jpl.nasa.gov/catalog/PIA19162

This exposure of finely laminated bedrock on Mars includes tiny crystal-shaped bumps, plus mineral veins with both bright and dark material. This rock target, called "Jura," was imaged by the Mars Hand Lens Imager (MAHLI) camera on NASA's Curiosity Mars rover on Jan. 4, 2018, during the 1,925th Martian day, or sol, of the rover's work on Mars. The view combines three MAHLI frames covering a postcard-size patch of the rock. Fig. 1 includes a scale bar of 2 centimeters (about 0.8 inch) and a blow-up of a "swallowtail" crystal shape. The combination of simpler "lenticular" crystal shapes with swallowtails and more complex "lark's foot" and star shapes is characteristic of crystals of gypsum, a type of calcium sulfate. To the right of a prominent swallowtail near the top of the image is one bright mineral vein and another with both bright and dark portions. This rock is near the southern, uphill edge of "Vera Rubin Ridge" on lower Mount Sharp. An annotated image (Fig. 1) is available at https://photojournal.jpl.nasa.gov/catalog/PIA22211

Light material emplaced within darker vein material is seen in this view of a mineral vein at the "Garden City" site on lower Mount Sharp, Mars. The Mars Hand Lens Imager (MAHLI) on the arm of NASA's Curiosity Mars Rover took the image on April 4, 2015, during the 946th Martian day, or sol, of Curiosity's work on Mars. The area shown is roughly 0.4 inch (1 centimeter) wide. Differences in textures of light-toned veins in the Garden City complex of crisscrossing mineral veins are clues that these veins may result from distinct fluid events. This example shows where injection of light material into a prior dark vein suggests high fluid pressure. Differences in textures of light-toned veins in the Garden City complex of crisscrossing mineral veins are clues that these veins may result from distinct fluid events. This vein's texture shows indications of crystal growth, suggesting that crystallization may have exerted a force for opening the fracture filled by the vein. Different examples are at PIA19925 and PIA19927. Mineral veins often form where fluids move through fractured rocks, depositing minerals in the fractures and affecting chemistry of the surrounding rock. At Garden City, the veins have been more resistant to erosion than the surrounding host rock. The fluid movement through fractures at Garden City occurred later than wet environmental conditions in which the host rock formed, before it hardened and cracked. Malin Space Science Systems, San Diego, built and operates MAHLI. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19926

This image of a Martian rock dubbed Sayunei is illuminated by ultraviolet LEDs light emitting diodes is part of the first set of nighttime images taken by the Mars Hand Lens Imagery camera at the end of the robotic arm of NASA Mars rover Curiosity.
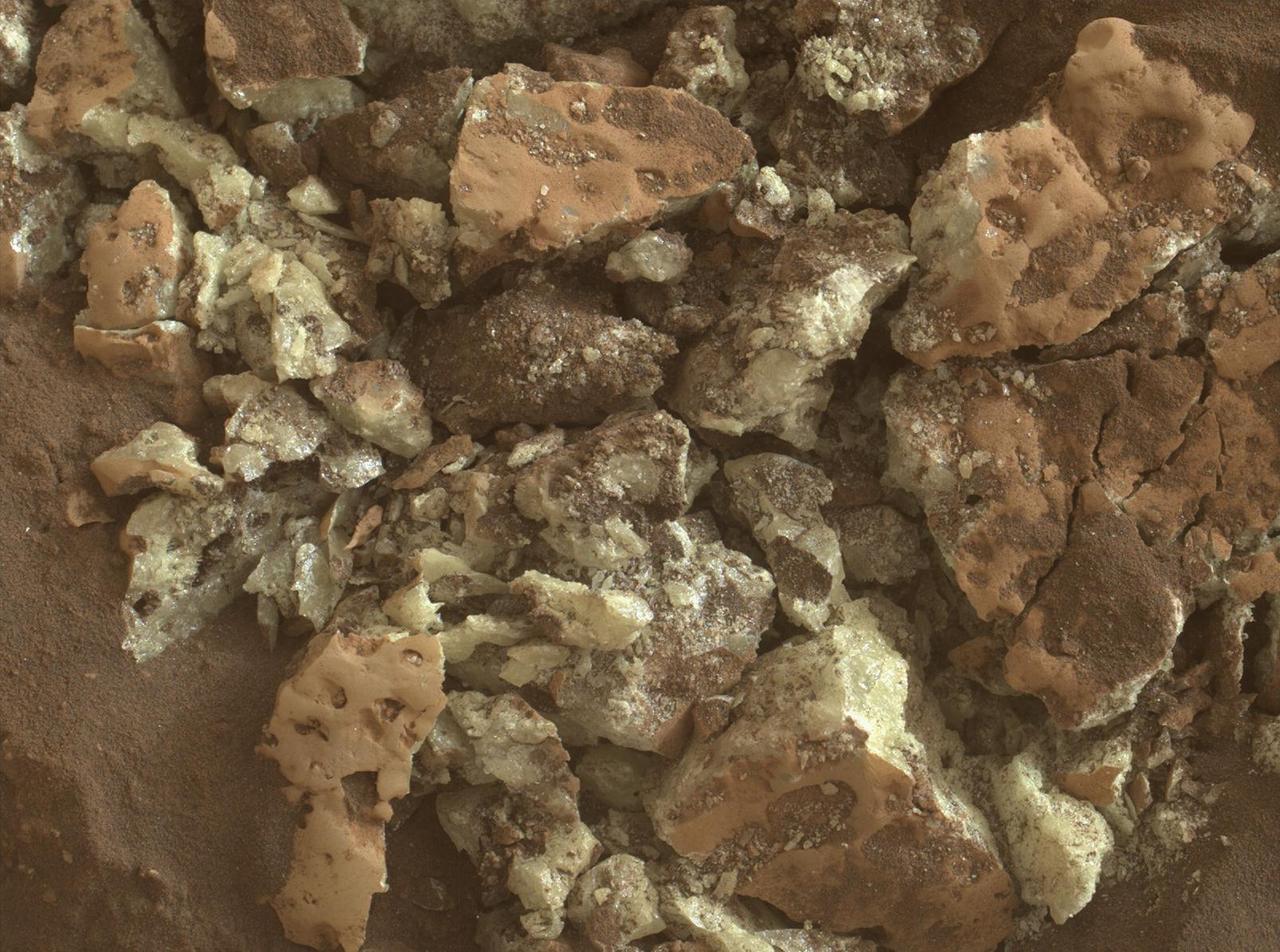
These sulfur crystals were found inside a rock after NASA's Curiosity Mars rover happened to drive over it and crush it on May 30, 2024, the 4,200th Martian day, or sol, of the mission. This image was captured by Curiosity's Mars Hand Lens Imager (MAHLI), a camera on the end of its robotic arm, on June 4, 2024, the 4,205th Martian day, or sol, of the mission. This rock was nicknamed "Convict Lake" after a location in California's Sierra Nevada. Curiosity's Alpha Particle X-Ray Spectrometer (APXS) found that the crystalline material is elemental sulfur. https://photojournal.jpl.nasa.gov/catalog/PIA26307

NASA's Curiosity Mars rover captured this close-up image of a rock nicknamed "Snow Lake" on June 8, 2024, the 4,209th Martian day, or sol, of the mission. The image was captured by Curiosity's Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. Nine days before this image was captured, Curiosity crushed a similar-looking rock and revealed crystalline textures inside. Curiosity's Alpha Particle X-Ray Spectrometer (APXS) found that the rock was made of elemental sulfur. An entire field of similar-looking rocks were found in this area; all are expected to have sulfur inside them. https://photojournal.jpl.nasa.gov/catalog/PIA26308

A mineral vein with bright and dark portions dominates this image of a Martian rock target called "Rona," which is near the southern, upper edge of "Vera Rubin Ridge" on Mount Sharp. The Mars Hand Lens Imager (MAHLI) camera on NASA's Curiosity Mars rover took this image on Jan. 17, 2018, during the 1,937th Martian day, or sol, of Curiosity's work on Mars. The grayer area in the center is roughly 2 inches by 3 inches (about 5 by 8 centimeters). That area, including a portion of the vein, was brushed with the Curiosity's wire-bristled Dust Removal Tool before the image was taken. https://photojournal.jpl.nasa.gov/catalog/PIA22214
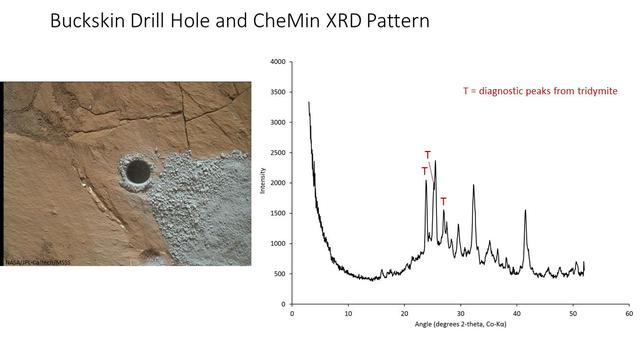
The graph at right presents information from the NASA Curiosity Mars rover's onboard analysis of rock powder drilled from the "Buckskin" target location, shown at left. X-ray diffraction analysis of the Buckskin sample inside the rover's Chemistry and Mineralogy (CheMin) instrument revealed the presence of a silica-containing mineral named tridymite. This is the first detection of tridymite on Mars. Peaks in the X-ray diffraction pattern are from minerals in the sample, and every mineral has a diagnostic set of peaks that allows identification. The image of Buckskin at left was taken by the rover's Mars Hand Lens Imager (MAHLI) camera on July 30, 2015, and is also available at PIA19804. http://photojournal.jpl.nasa.gov/catalog/PIA20271
A selfie taken by NASA's Curiosity Mars rover on Sol 2291 (January 15) at the "Rock Hall" drill site, located on Vera Rubin Ridge. This was Curiosity's 19th drill site. The drill hole is visible to the rover's lower-left; the entire scene is slightly dustier than usual due to a regional dust storm affecting the area. The selfie is composed of 57 individual images taken by the rover's Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are then stitched together into a panorama. https://photojournal.jpl.nasa.gov/catalog/PIA22960

This view of the undisturbed surface of a Martian sand dune called "High Dune" visited by NASA's Curiosity rover shows coarse grains remaining on the surface after wind removal of smaller particles. The image covers an area 1.4 inches by 1.1 inches (3.6 by 2.7 centimeters). It was taken by the Mars Hand Lens Imager (MAHLI) camera on the rover's arm on Dec. 5, 2015, during the 1,184th Martian day, or sol, of Curiosity's work on Mars. The imaged location is near the base of the dune. High Dune, in the Bagnold Dunes field skirting the northwestern flank of Mount Sharp, is the first sand dune studied in place anywhere except Earth. What distinguishes actual dunes from windblown ripples of sand or dust, like those found at several sites visited previously by Mars rovers, is that dunes form a downwind face steep enough for sand to slide down. http://photojournal.jpl.nasa.gov/catalog/PIA20171
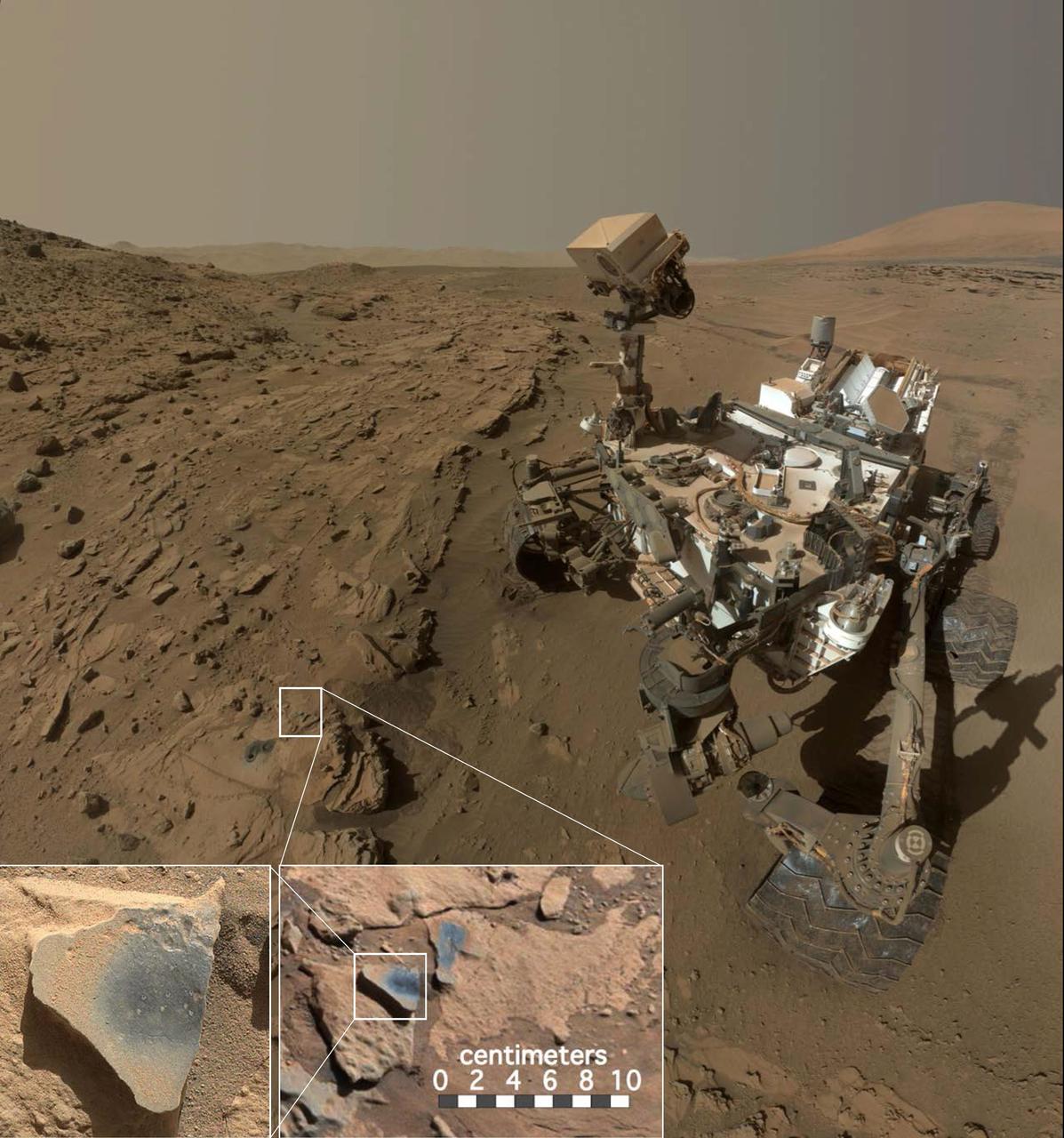
This scene shows NASA's Curiosity Mars rover at a location called "Windjana," where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. In front of the rover are two holes from the rover's sample-collection drill and several dark-toned features that have been cleared of dust (see inset images). These flat features are erosion-resistant fracture fills containing manganese oxides. The discovery of these materials suggests the Martian atmosphere might once have contained higher abundances of free oxygen than it does now. The rover used the Mars Hand Lens Imager (MAHLI) camera in April and May 2014 to take dozens of images that were combined into this self-portrait. http://photojournal.jpl.nasa.gov/catalog/PIA20752

This view shows grains of sand where NASA's Curiosity Mars rover was driven into a shallow sand sheet near a large dune. The disturbance by the wheel exposed interior material of the sand body, including finer sand grains than on the undisturbed surface. Sunlight is coming from the left. The scene covers an area 1.3 inches by 1.0 inch (3.3 by 2.5 centimeters). This is a focus-merge product from Curiosity's Mars Hand Lens Imager (MAHLI), combining multiple images taken at different focus settings to yield sharper focus at varying distances from the lens. The component images were taken on Dec. 3, 2015, during the 1,182nd Martian day, or sol, of Curiosity's work on Mars. http://photojournal.jpl.nasa.gov/catalog/PIA20170
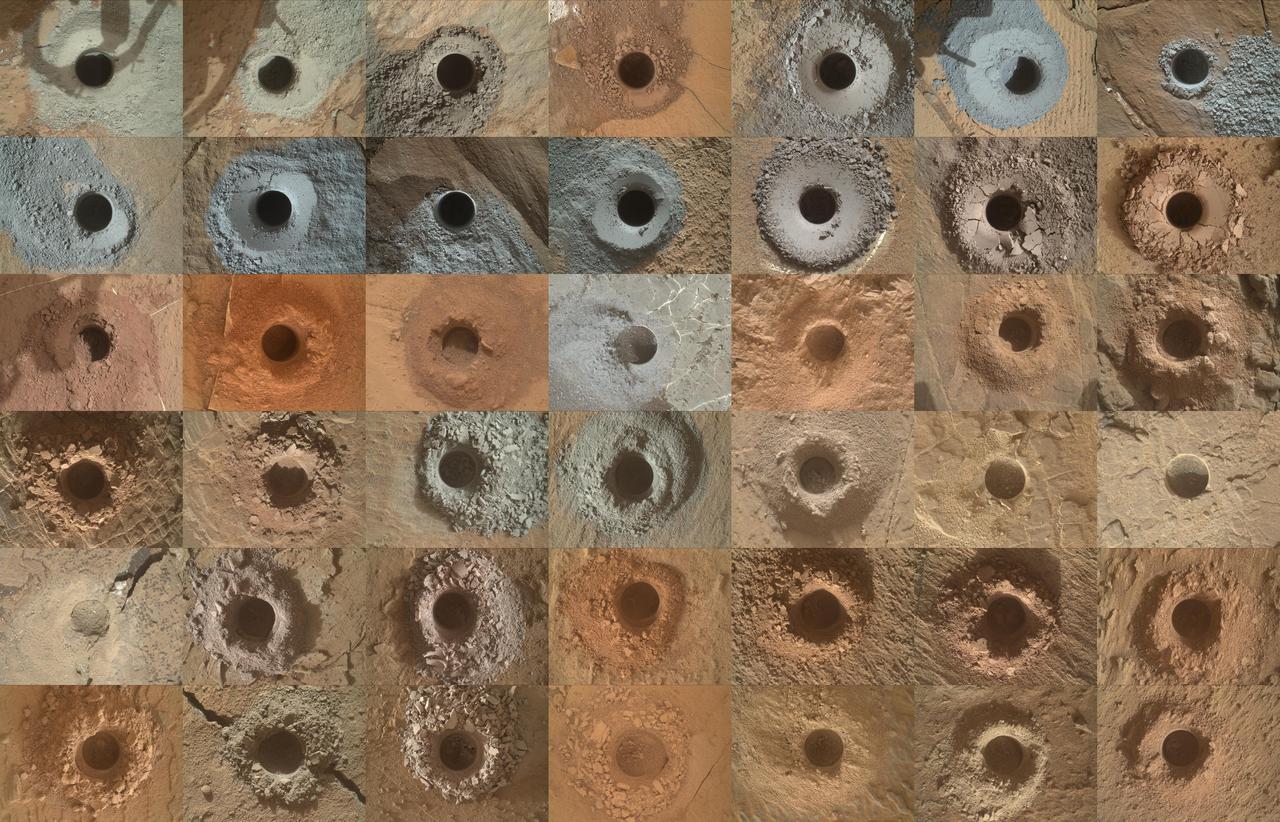
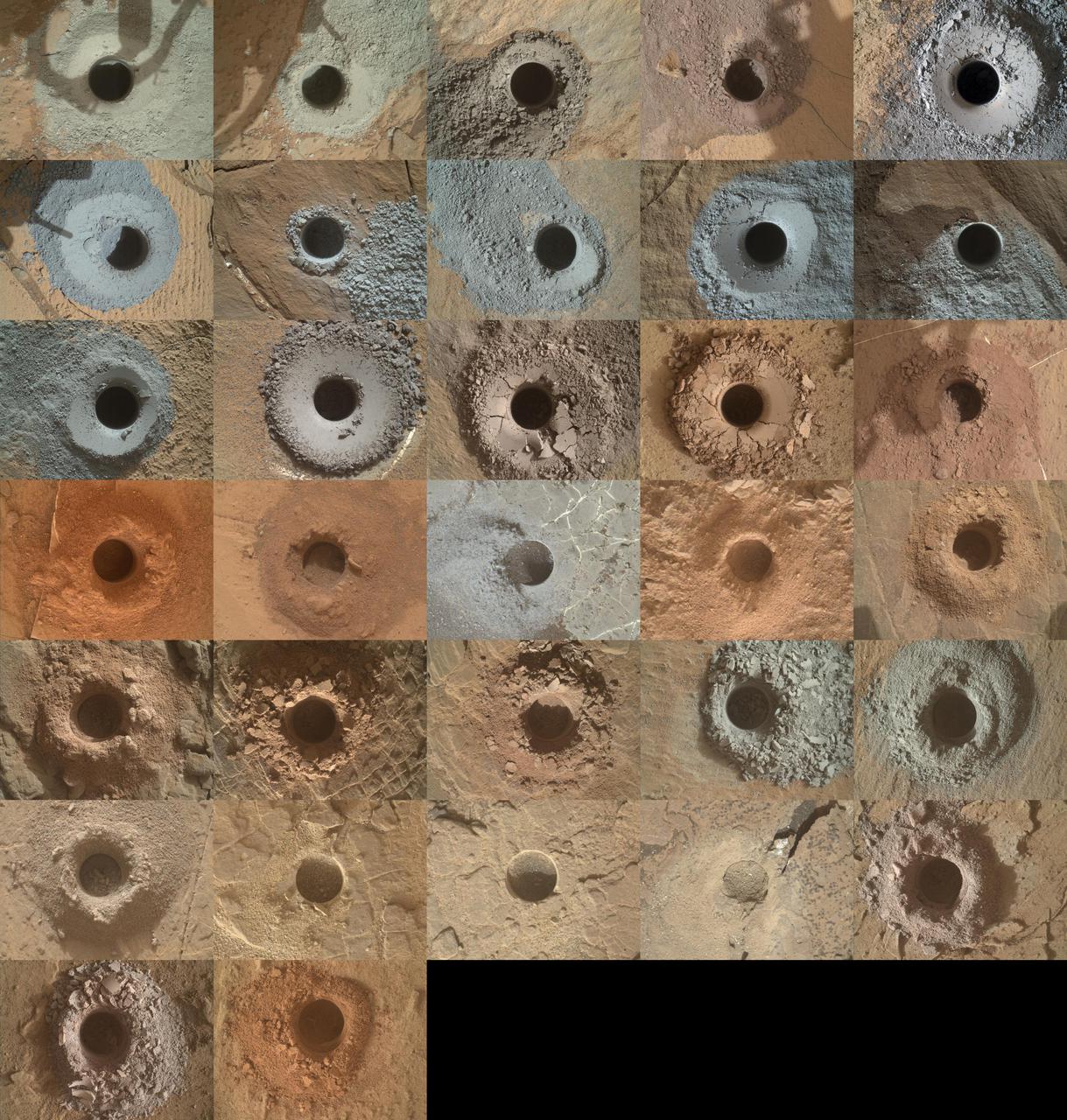
NASA's Curiosity Mars rover has collected 42 powderized rock samples with the drill on the end of its robotic arm. This grid shows all 42 holes made by the drill when collecting the samples, from "John Klein" (drilled on Feb. 9, 2013, the 182nd Martian day, or sol, of the mission) in the upper left, to "Kings Canyon" (drilled on Aug. 3, 2024, the 4,263rd Martian day, or sol, of the mission) in the lower right. Each hole is a little over a half-inch (16 millimeters) wide. The images were captured by the Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's arm. After drilling a sample, the powderized rock is trickled into instruments inside of Curiosity's belly that can analyze the composition of the rocks. Those instruments include Sample Analysis at Mars (SAM) and Chemistry & Mineralogy (CheMin). https://photojournal.jpl.nasa.gov/catalog/PIA26403
This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its rock and soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 21 rock-powder samples were acquired. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. https://photojournal.jpl.nasa.gov/catalog/PIA23413
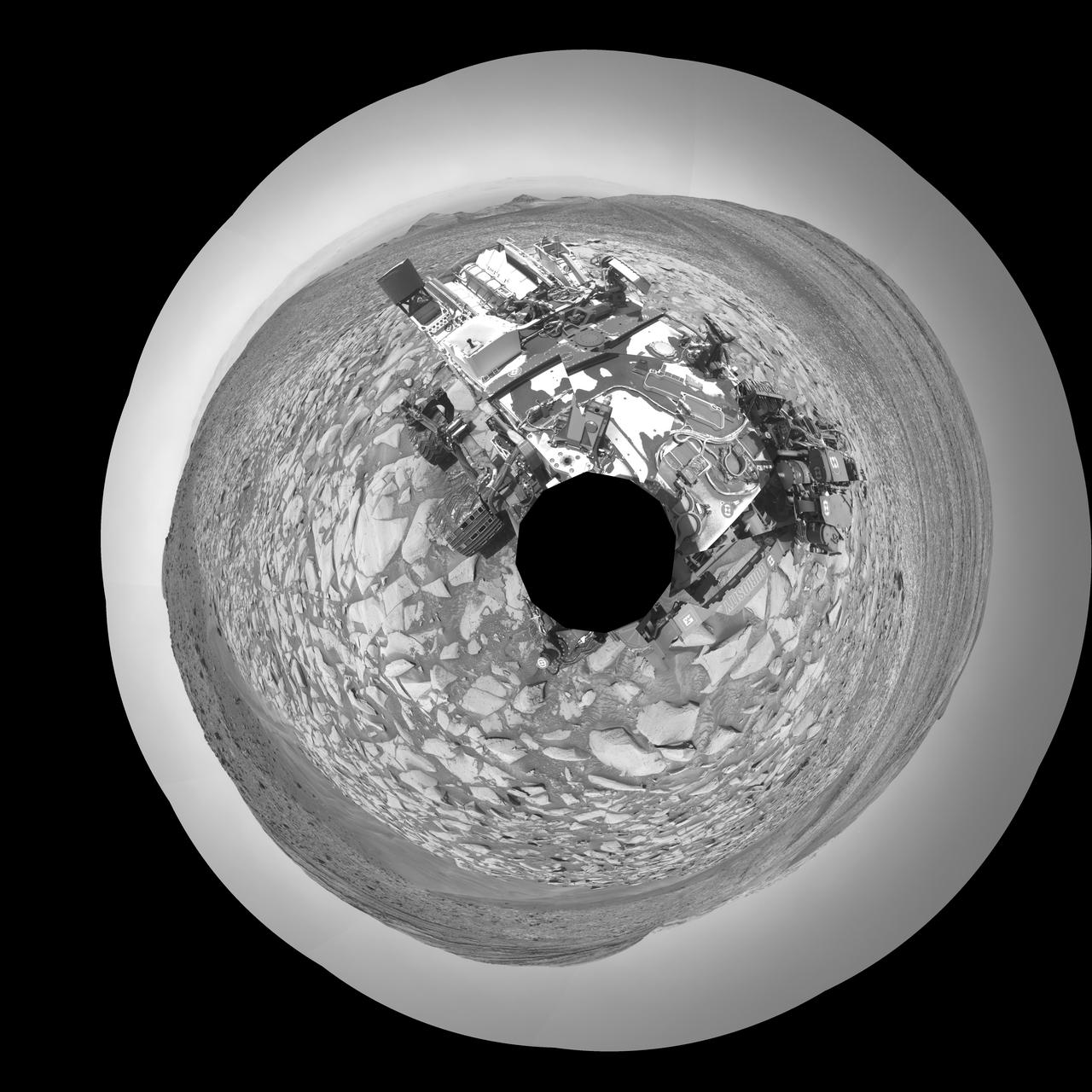
NASA's Curiosity Mars rover captured this selfie using its left black-and-white navigation camera, which is mounted on its mast, or "head," on Feb. 3, 2024, the 4,086th Martian day, or sol, of the mission. The selfie is made up of 36 individual images that were stitched together after being sent back to Earth. This warped view is different than the color selfies Curiosity has taken in the past using the camera on the end of its robotic arm, called the Mars Hand Lens Imager, or MAHLI. With its arm acting as a kind of selfie stick, Curiosity can show more of its body and surroundings. Instead, the images from the navigation camera on the mast are displayed as a polar projection; the black hole in the center is where the mast is located on the rover, an area which it can't image. https://photojournal.jpl.nasa.gov/catalog/PIA26310
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at "Namib Dune," where the rover's activities included scuffing into the dune with a wheel and scooping samples of sand for laboratory analysis. The scene combines 57 images taken on Jan. 19, 2016, during the 1,228th Martian day, or sol, of Curiosity's work on Mars. The camera used for this is the Mars Hand Lens Imager (MAHLI) at the end of the rover's robotic arm. Namib Dune is part of the dark-sand "Bagnold Dune Field" along the northwestern flank of Mount Sharp. Images taken from orbit have shown that dunes in the Bagnold field move as much as about 3 feet (1 meter) per Earth year. The location of Namib Dune is show on a map of Curiosity's route at http://mars.nasa.gov/msl/multimedia/images/?ImageID=7640. The relationship of Bagnold Dune Field to the lower portion of Mount Sharp is shown in a map at PIA16064. The view does not include the rover's arm. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390) and "Buckskin" (PIA19807). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Other Curiosity self-portraits are available at http://photojournal.jpl.nasa.gov/catalog/PIA20316

This self-portrait of NASA's Curiosity Mars rover shows the vehicle at a drilled sample site called "Okoruso," on the "Naukluft Plateau" of lower Mount Sharp. The scene combines multiple images taken with the rover's Mars Hand Lens Imager (MAHLI) on May 11, 2016, during the 1,338th Martian day, or sol, of the rover's work on Mars. In front of the rover is the hole, surrounded by grayish drill cuttings, created by using Curiosity's drill to collect sample rock powder at Okoruo, plus a patch of powder dumped onto the ground after delivery of a portion to the rover's internal Chemistry and Mineralogy (CheMin) laboratory instrument. The rover team compared the rock powder from drilling at Okoruso to material from the nearby "Lubango" drilling site, which is visible behind the rover, just to the left of the mast. The Lubango site was selected within a pale zone, or "halo," beside a fracture in the area's sandstone bedrock. Okoruso is in less-altered bedrock farther from any fractures. Note that the Okoruso drill cuttings appear darker than the Lubango drill cuttings. The Lubango sample was found to be enriched in silica and sulfates, relative to Okoruso. To the left of the rover, in this scene, several broken rocks reveal grayish interiors. Here, Curiosity was driven over the rocks in a fracture-associated halo, so that freshly exposed surfaces could be examined with MAHLI, Mast Camera (Mastcam) and Chemistry and Camera (ChemCam) instruments. An upper portion of Mount Sharp is prominent on the horizon. http://photojournal.jpl.nasa.gov/catalog/PIA20602
NASA's Curiosity rover took this selfie on Oct. 11, 2019, the 2,553rd Martian day, or sol, of its mission. The rover drilled twice in this location, nicknamed "Glen Etive" (pronounced "glen EH-tiv"). About 984 feet (300 meters) behind the rover, Vera Rubin Ridge rises up. Behind it lies the floor of Gale Crater, which Curiosity is exploring, and the northern rim of the crater. Just left of the rover are the two drill holes, called "Glen Etive 1" (right) and "Glen Etive 2" (left). Curiosity performed its first wet-chemistry experiment on a drilled sample at this location. The rover can analyze the chemical composition of rock samples by powderizing them with the drill, then dropping the samples into a portable lab in its belly called Sample Analysis at Mars (SAM). This panorama is made up of 57 individual images taken by the Mars Hand Lens Imager (MAHLI), a camera on the end of the rover's robotic arm. The images are stitched together into a panorama; the robotic arm isn't visible in the parts of the images used in the composite. https://photojournal.jpl.nasa.gov/catalog/PIA23378

The surface of the Martian rock target in this stereo image includes small hollows with a "swallowtail" shape characteristic of some gypsum crystals, most evident in the lower left quadrant. These hollows may have resulted from the original crystallizing mineral subsequently dissolving away. The view appears three-dimensional when seen through blue-red glasses with the red lens on the left. The scene spans about 2.5 inches (6.5 centimeters). This rock target, called "Funzie," is near the southern, uphill edge of "Vera Rubin Ridge" on lower Mount Sharp. The stereo view combines two images taken from slightly different angles by the Mars Hand Lens Imager (MAHLI) camera on NASA's Curiosity Mars rover, with the camera about 4 inches (10 centimeters) above the target. Fig. 1 and Fig. 2 are the separate "right-eye" and "left-eye" images, taken on Jan. 11, 2018, during the 1,932nd Martian day, or sol, of the rover's work on Mars. Right-eye and left-eye images are available at https://photojournal.jpl.nasa.gov/catalog/PIA22212
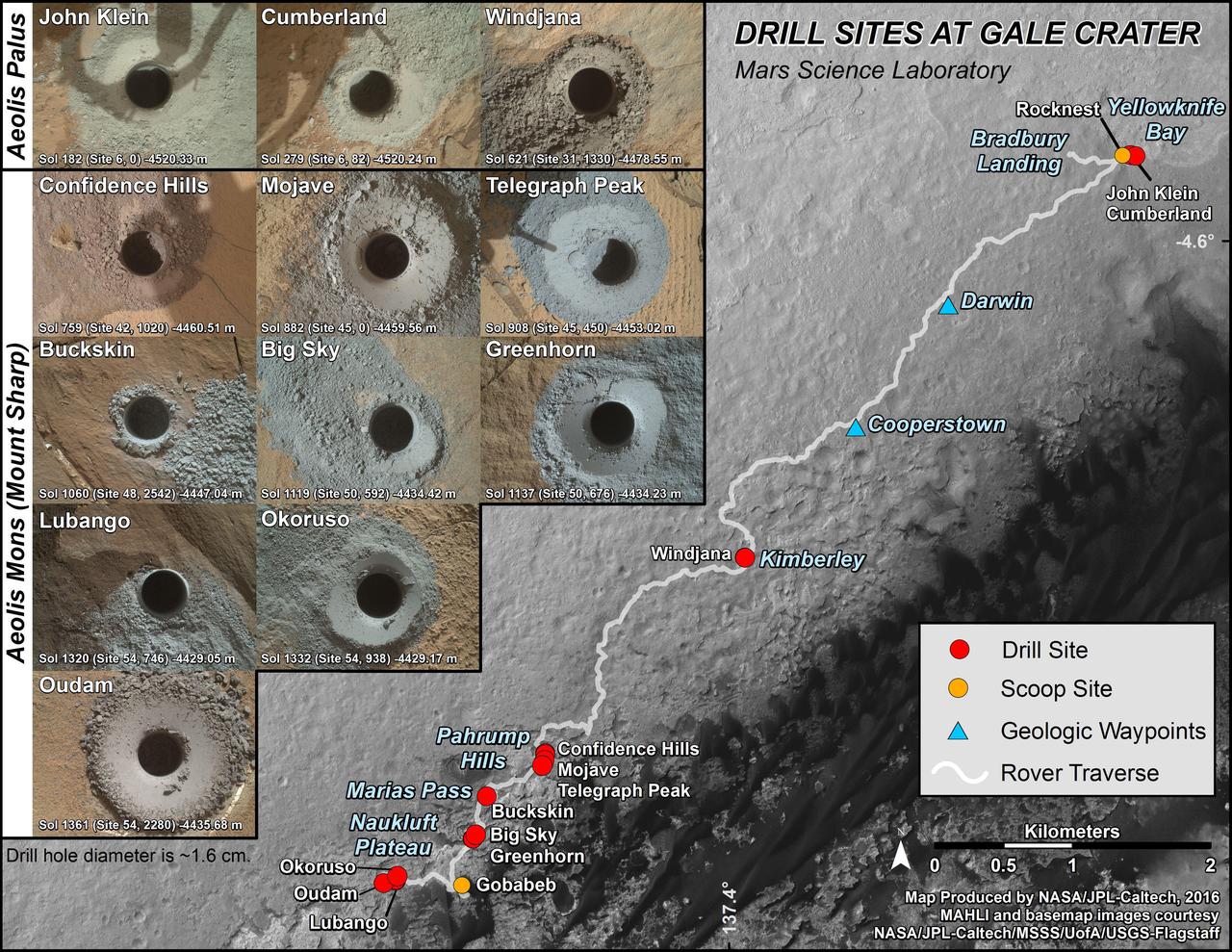
This graphic maps locations of the first 14 sites where NASA's Curiosity Mars rover collected rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 12 rock-powder samples were acquired. At the other two sites -- Rocknest and Gobabeb -- Curiosity scooped soil samples. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. The latest sample site included is "Oudam," where Curiosity drilled into mudstone of the "Murray formation" on June 4, during the 1,361th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). Dates when the first 11 drilled-rock samples were collected are: "John Klein" on Feb. 8, 2013 (Sol 182); "Cumberland" on May 19, 2013 (Sol 279); "Windjana" on May 5, 2014 (Sol 621); "Confidence Hills" on Sept. 24, 2014 (Sol 759); "Mojave" on Jan. 29, 2015 (Sol 882); "Telegraph Peak" on Feb. 24, 2015 (Sol 908); "Buckskin" on July 30, 2015 (Sol 1060); "Big Sky" on Sept. 29, 2015 (Sol 1119); "Greenhorn" on Oct. 18, 2015 (Sol 1137); "Lubango" on April 23, 2016 (Sol 1320); and "Okoruso" on May 5, 2016 (Sol 1332). http://photojournal.jpl.nasa.gov/catalog/PIA20748

This false-color image demonstrates how use of special filters available on the Mast Camera (Mastcam) of NASA's Curiosity Mars rover can reveal the presence of certain minerals in target rocks. It is a composite of images taken through three "science" filters chosen for making hematite, an iron-oxide mineral, stand out as exaggerated purple. This target rock, called "Christmas Cove," lies in an area on Mars' "Vera Rubin Ridge" where Mastcam reconnaissance imaging (see PIA22065) with science filters suggested a patchy distribution of exposed hematite. Bright lines within the rocks are fractures filled with calcium sulfate minerals. Christmas Cove did not appear to contain much hematite until the rover team conducted an experiment on this target: Curiosity's wire-bristled brush, the Dust Removal Tool, scrubbed the rock, and a close-up with the Mars Hand Lens Imager (MAHLI) confirmed the brushing. The brushed area is about is about 2.5 inches (6 centimeters) across. The next day -- Sept. 17, 2017, on the mission's Sol 1819 -- this observation with Mastcam and others with the Chemistry and Camera (ChemCam showed a strong hematite presence that had been subdued beneath the dust. The team is continuing to explore whether the patchiness in the reconnaissance imaging may result more from variations in the amount of dust cover rather than from variations in hematite content. Curiosity's Mastcam combines two cameras: one with a telephoto lens and the other with a wider-angle lens. Each camera has a filter wheel that can be rotated in front of the lens for a choice of eight different filters. One filter for each camera is clear to all visible light, for regular full-color photos, and another is specifically for viewing the Sun. Some of the other filters were selected to admit wavelengths of light that are useful for identifying iron minerals. Each of the filters used for this image admits light from a narrow band of wavelengths, extending to only about 5 nanometers longer or shorter than the filter's central wavelength. Three observations are combined for this image, each through one of the filters centered at 751 nanometers (in the near-infrared part of the spectrum just beyond red light), 527 nanometers (green) and 445 nanometers (blue). Usual color photographs from digital cameras -- such as a Mastcam one of this same place (see PIA22067) -- also combine information from red, green and blue filtering, but the filters are in a microscopic grid in a "Bayer" filter array situated directly over the detector behind the lens, with wider bands of wavelengths. Mastcam's narrow-band filters used for this view help to increase spectral contrast, making blues bluer and reds redder, particularly with the processing used to boost contrast in each of the component images of this composite. Fine-grained hematite preferentially absorbs sunlight around in the green portion of the spectrum around 527 nanometers. That gives it the purple look from a combination of red and blue light reflected by the hematite and reaching the camera through the other two filters. https://photojournal.jpl.nasa.gov/catalog/PIA22066