
MB-3A Airplane
MB-3A Cockpit

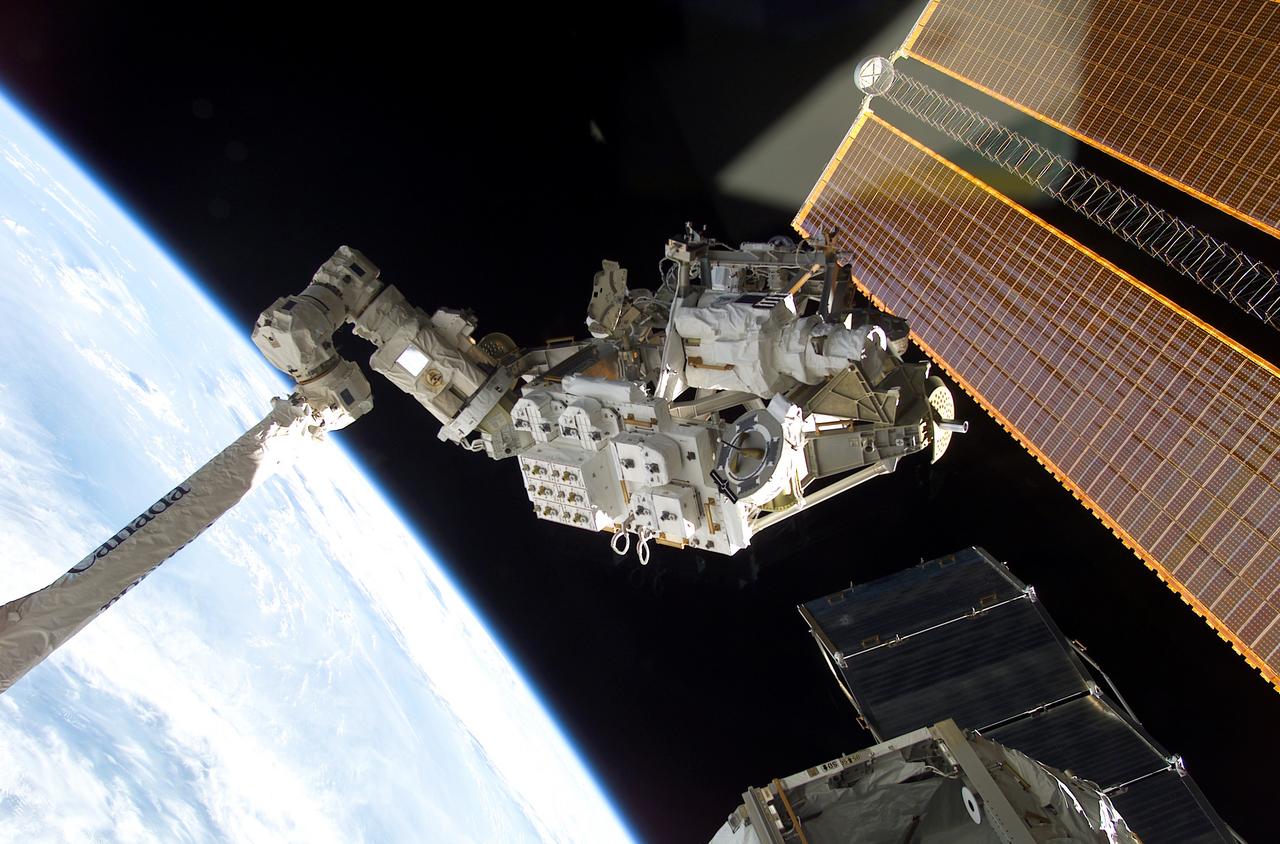
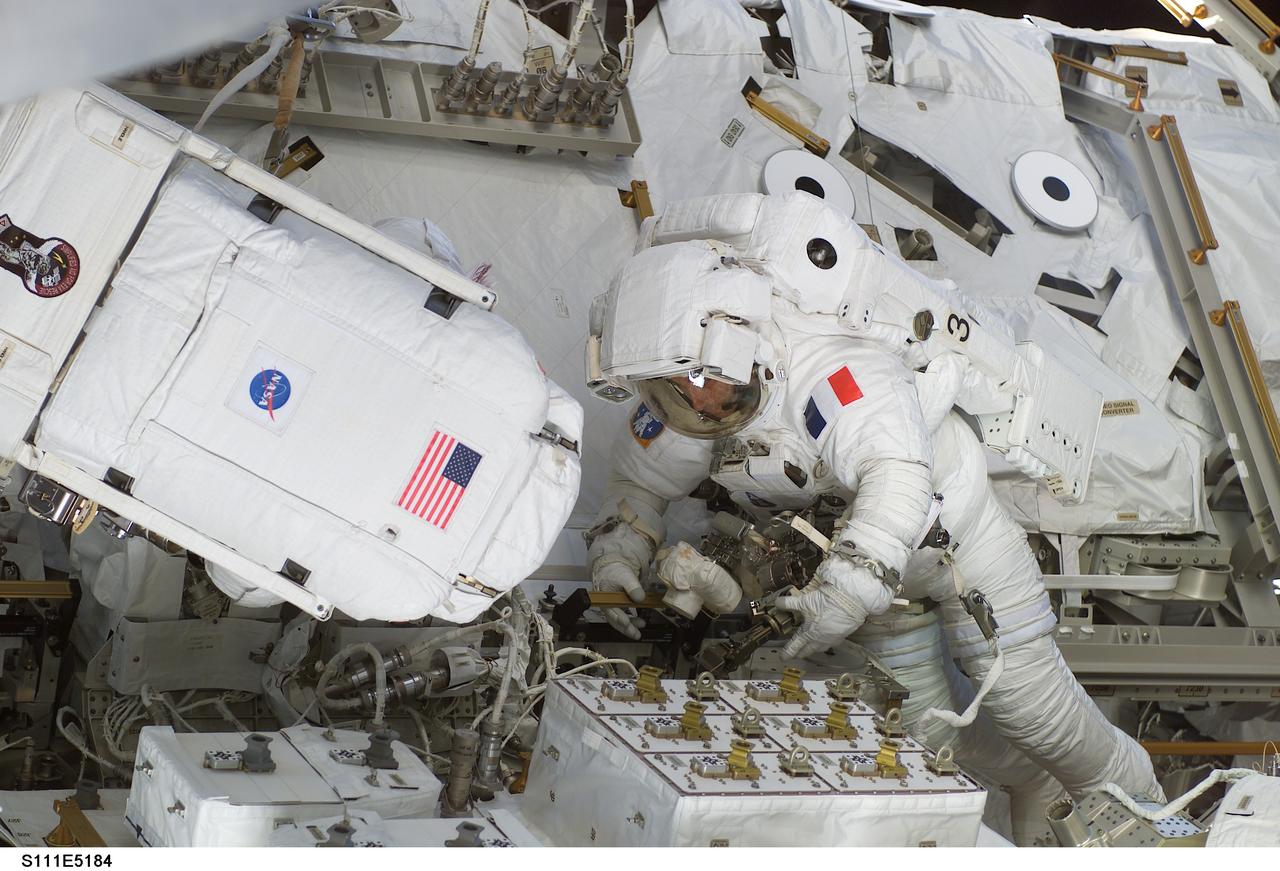
The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot; and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valeri G. Korzun, commander; Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks. In this photograph, Astronaut Philippe Perrin, representing CNES, the French Space Agency, participates in the second scheduled EVA. During the space walk, Perrin and Chang-Diaz attached power, data, and video cables from the ISS to the MBS, and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).

ISS030-E-060136 (2 Feb. 2012) --- NASA astronaut Dan Burbank, Expedition 30 commander, works with the Portable Pulmonary Function System (PPFS) Mixing Bag System (MBS) in the Destiny laboratory of the International Space Station.

The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot; and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valery G. Korzun, commander; and Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks. In this photograph, Astronaut Franklin R. Chang-Diaz participates in the first scheduled session of extra vehicular activity (EVA) for the STS-111 mission. During the space walk, Chang-Diaz and Perrin attached a Power and Data Grapple Fixture onto the ISS's P6 Truss, setting the stage for the future relocation of the P6. The next major task was to remove Service Module Debris Panels from Space Shuttle Endeavour's payload bay and attach them to their temporary location on Pressurized Mating Adapter 1 (PMA-1). The space walkers also removed thermal blankets to prepare the MBS for installation onto the station's Mobile Transporter (MT).

STS111-E-5142 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.

STS111-E-5139 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.
Backdropped against the blackness of space and the Earth's horizon, the Mobile Remote Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Delivered by the STS-111 mission aboard the Space Shuttle Endeavour in June 2002, the MBS is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station, which is neccessary for future construction tasks. In addition, STS-111 delivered a new crew, Expedition Five, replacing Expedition Four after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the MBS to the Mobile Transporter on the S0 (S-zero) truss, the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

STS111-307-017 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist representing CNES, the French Space Agency, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Perrin and Chang-Diaz attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).

STS111-E-5172 (11 June 2002) --- Astronaut Philippe Perrin, mission specialist representing CNES, the French Space Agency, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Perrin and Chang-Diaz attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).

STS111-E-5174 (11 June 2002) --- Astronaut Philippe Perrin, mission specialist representing CNES, the French Space Agency, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Perrin and Chang-Diaz attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).
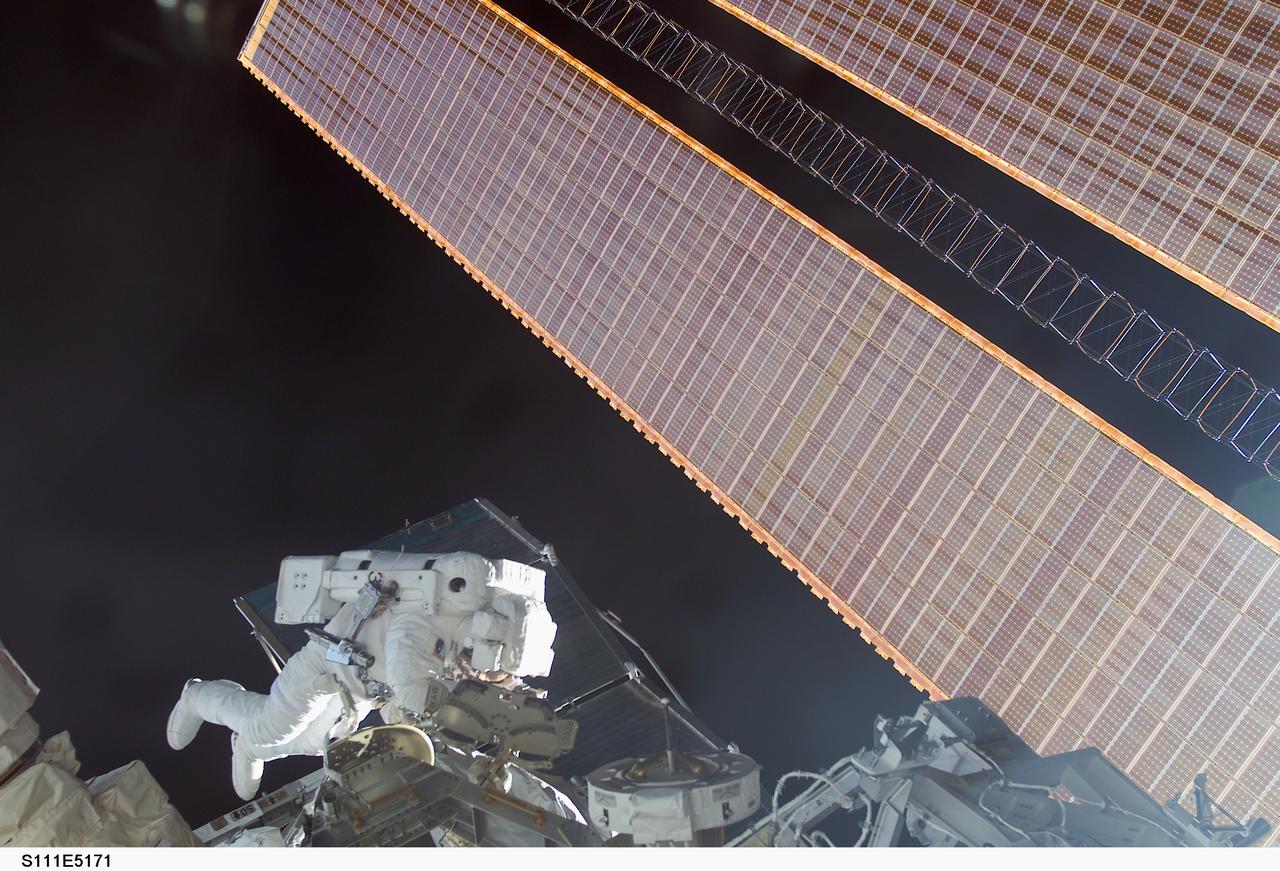
STS111-E-5171 (11 June 2002) --- Astronaut Philippe Perrin, mission specialist representing CNES, the French Space Agency, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Perrin and Chang-Diaz attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).
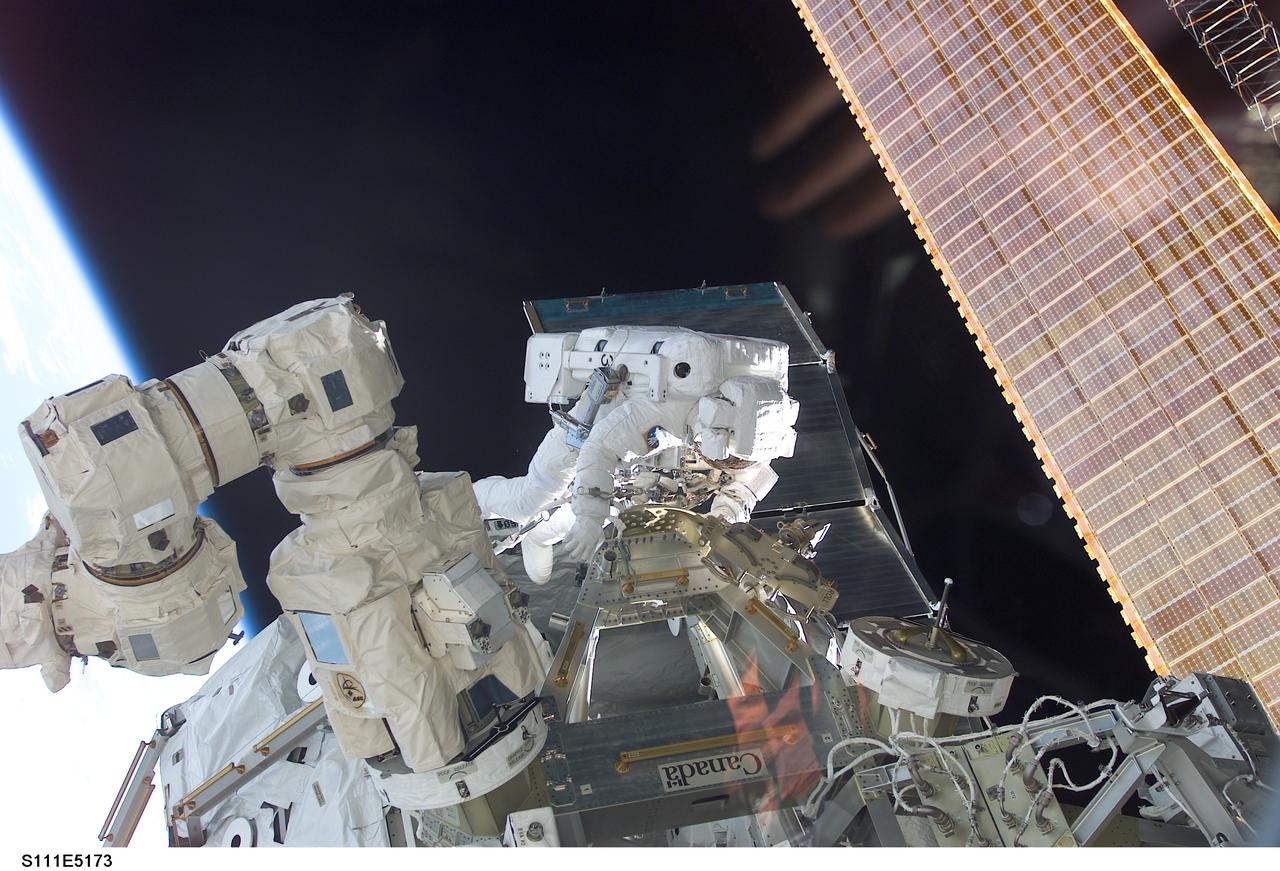
STS111-E-5173 (11 June 2002) --- Astronaut Philippe Perrin, mission specialist representing CNES, the French Space Agency, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Perrin and Chang-Diaz attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).
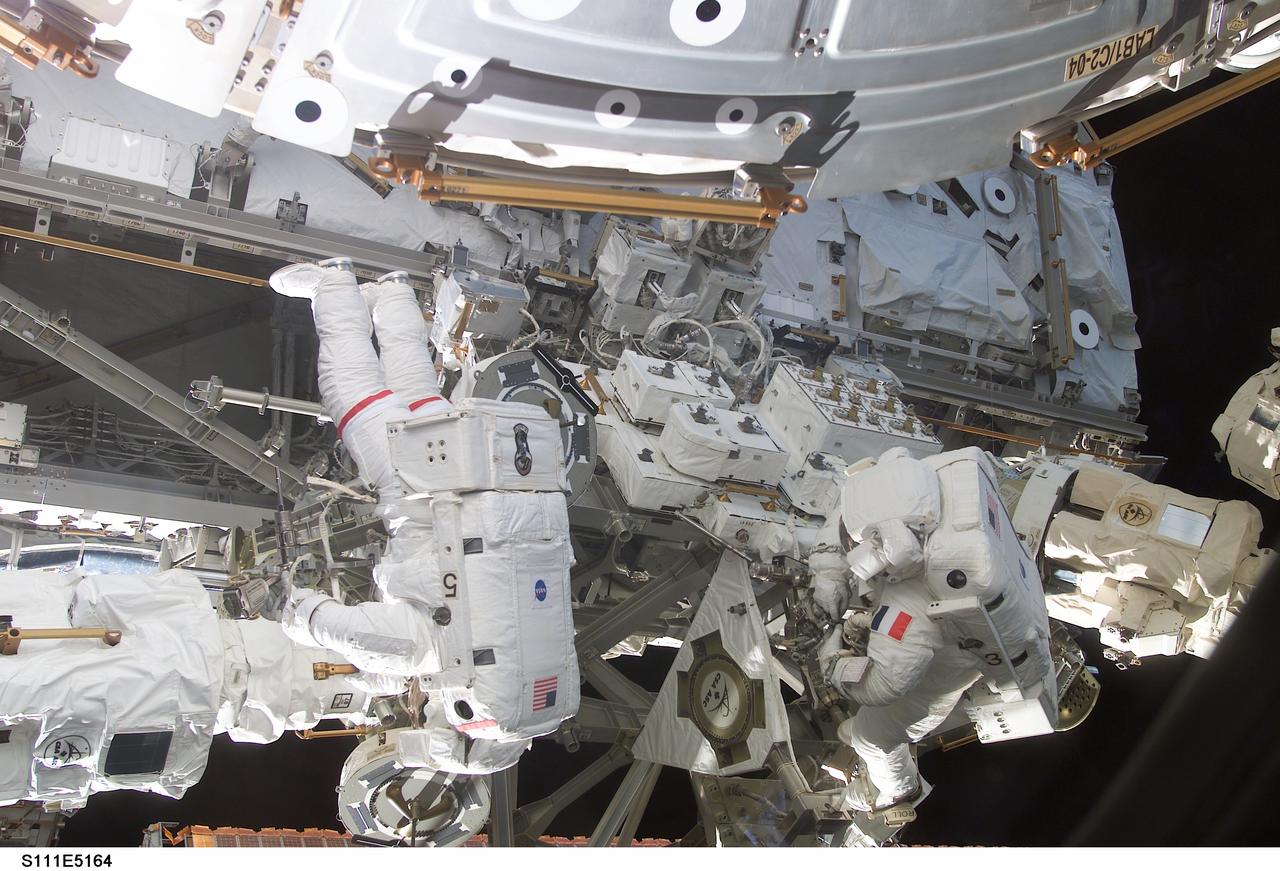
STS111-E-5164 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both STS-111 mission specialists, work in tandem on the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Chang-Diaz and Perrin attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT). Perrin represents CNES, the French Space Agency.
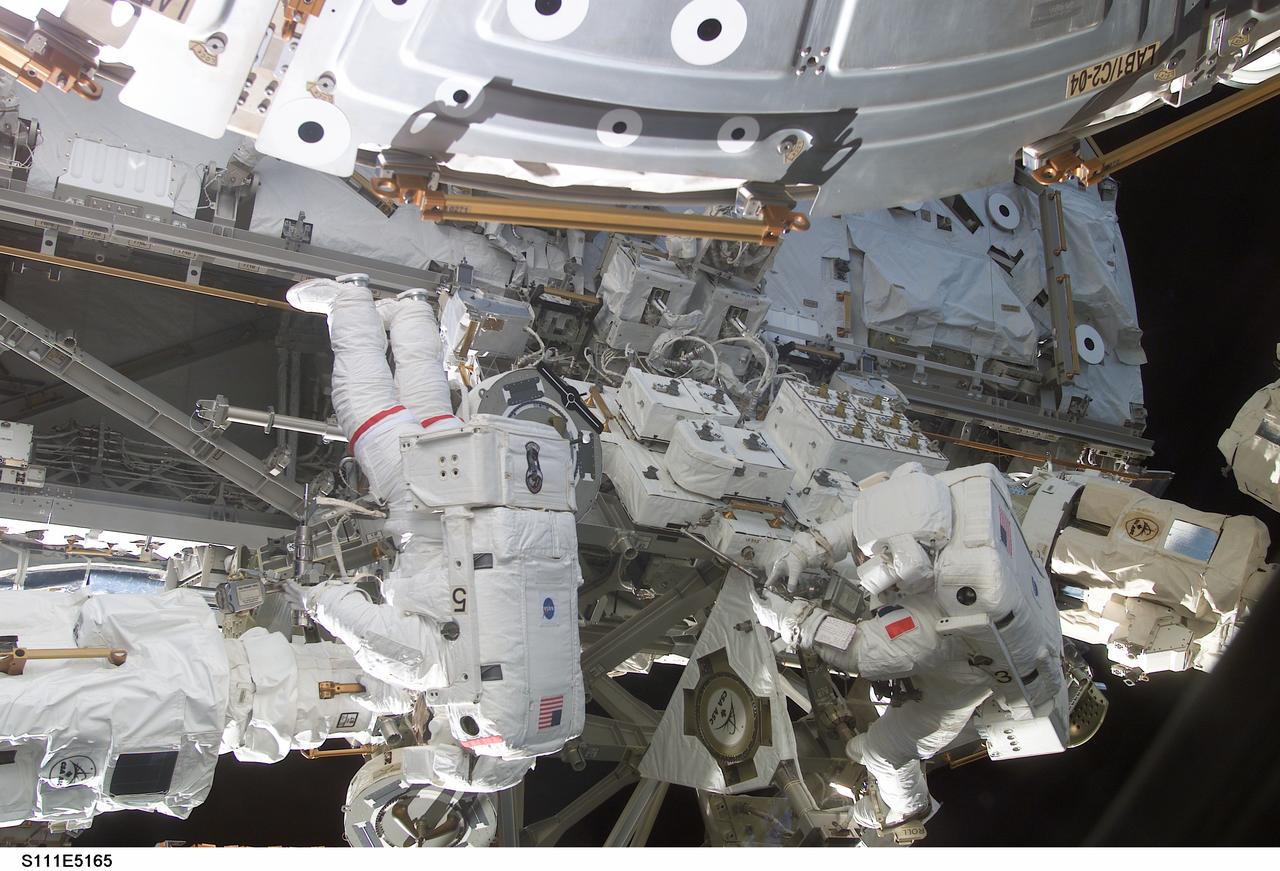
STS111-E-5165 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both STS-111 mission specialists, work in tandem on the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Chang-Diaz and Perrin attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT). Perrin represents CNES, the French Space Agency.
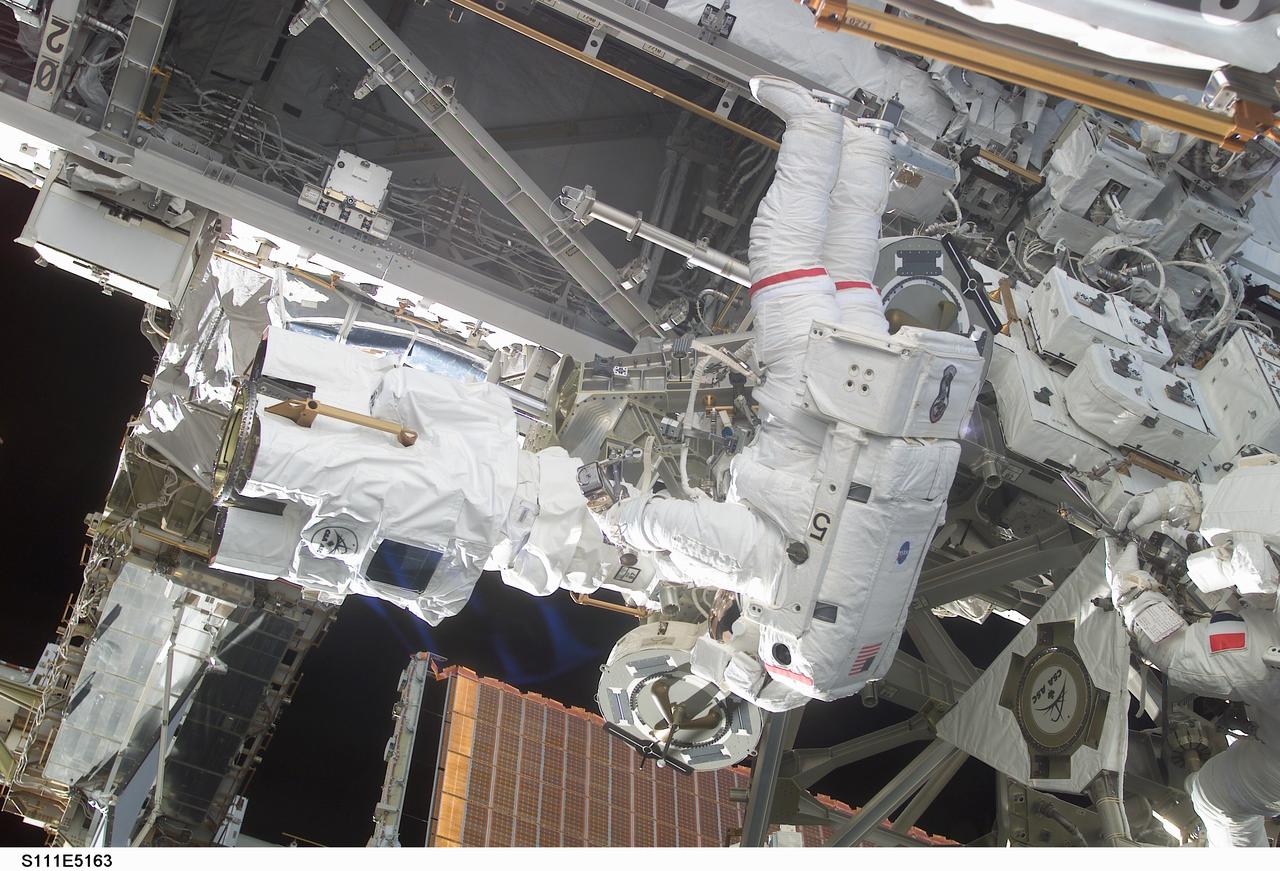
STS111-E-5163 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (center frame) and Philippe Perrin (partially obscured), both STS-111 mission specialists, work in tandem on the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Chang-Diaz and Perrin attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT). Perrin represents CNES, the French Space Agency.
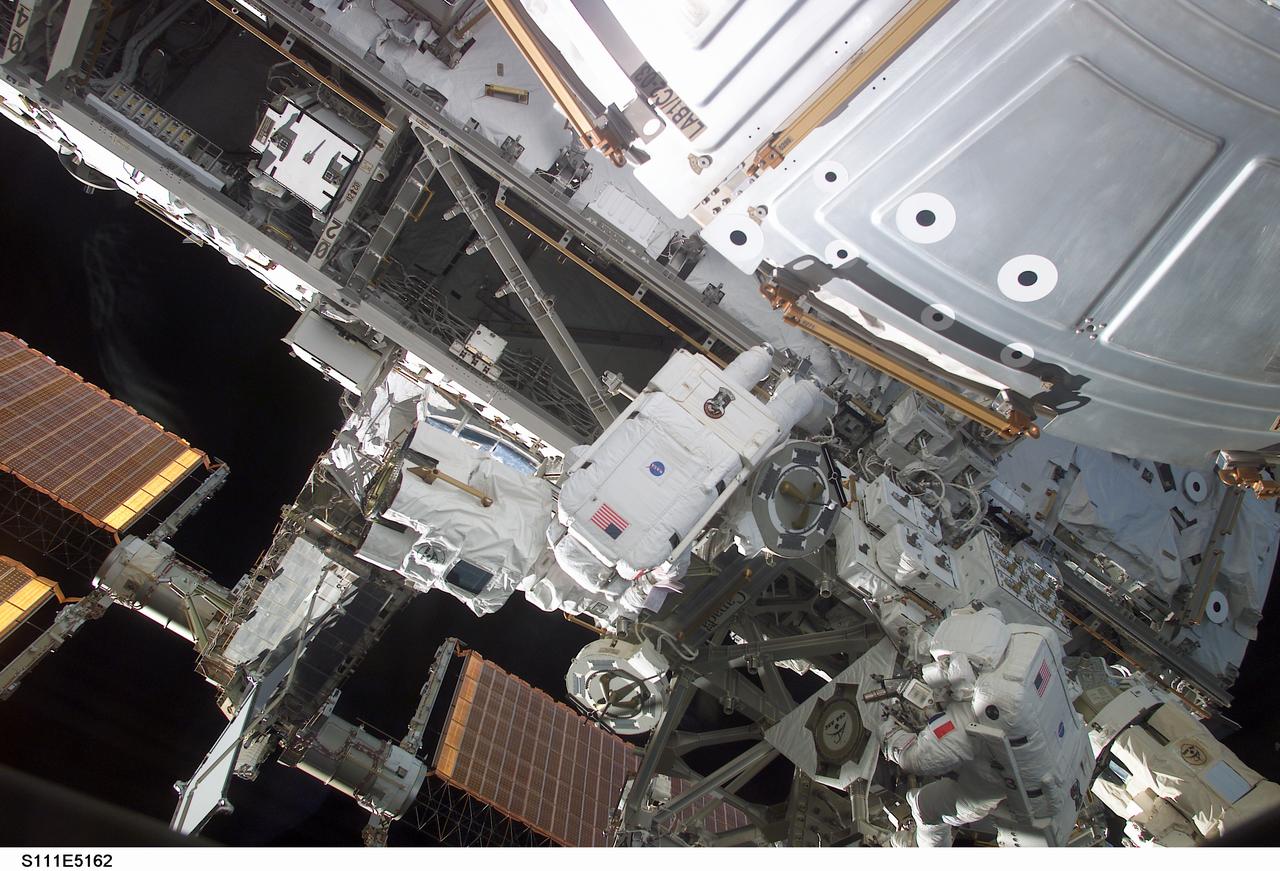
STS111-E-5162 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (center frame) and Philippe Perrin, both STS-111 mission specialists, work in tandem on the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Chang-Diaz and Perrin attached power, data and video cables from the International Space Station (ISS) to the Mobile Base System (MBS) and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT). Perrin represents CNES, the French Space Agency.
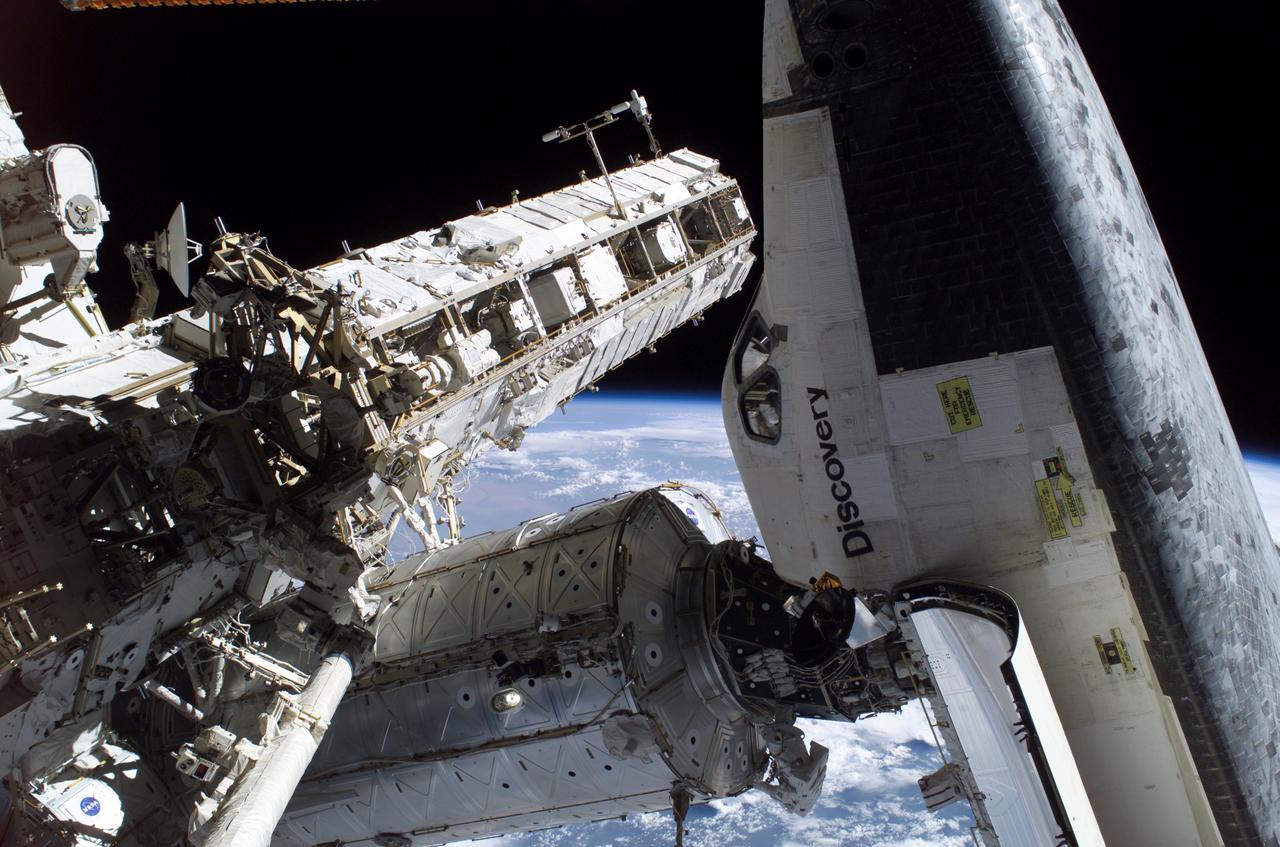
S114-E-6455 (3 August 2005) --- This image features a view of Space Shuttle Discovery docked to the Pressurized Mating Adapter 2 (PMA-2) on the Destiny laboratory of the international space station. The Crew Equipment Translation Aid (CETA) cart and the Mobile Base System (MBS), mounted on the S0 truss, are visible at left. Part of the P1 truss is also visible in the background. Dwarfed by the station and shuttle, Japan Aerospace Exploration Agency (JAXA) astronaut Soichi Noguchi, STS-114 mission specialist, is visible near the PMA-2 during the mission’s third session of extravehicular activity (EVA). The blackness of space and a blue and white Earth form the backdrop for the image.

Pictured here is the Space Shuttle Orbiter Endeavour, STS-111 mission insignia. The International Space Station (ISS) recieved a new crew, Expedition Five, replacing Expedition Four after a record-setting 196 days in space, when STS-111 visited in June 2002. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of a new platform for the ISS robotic arm, the Mobile Base System (MBS) which is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.
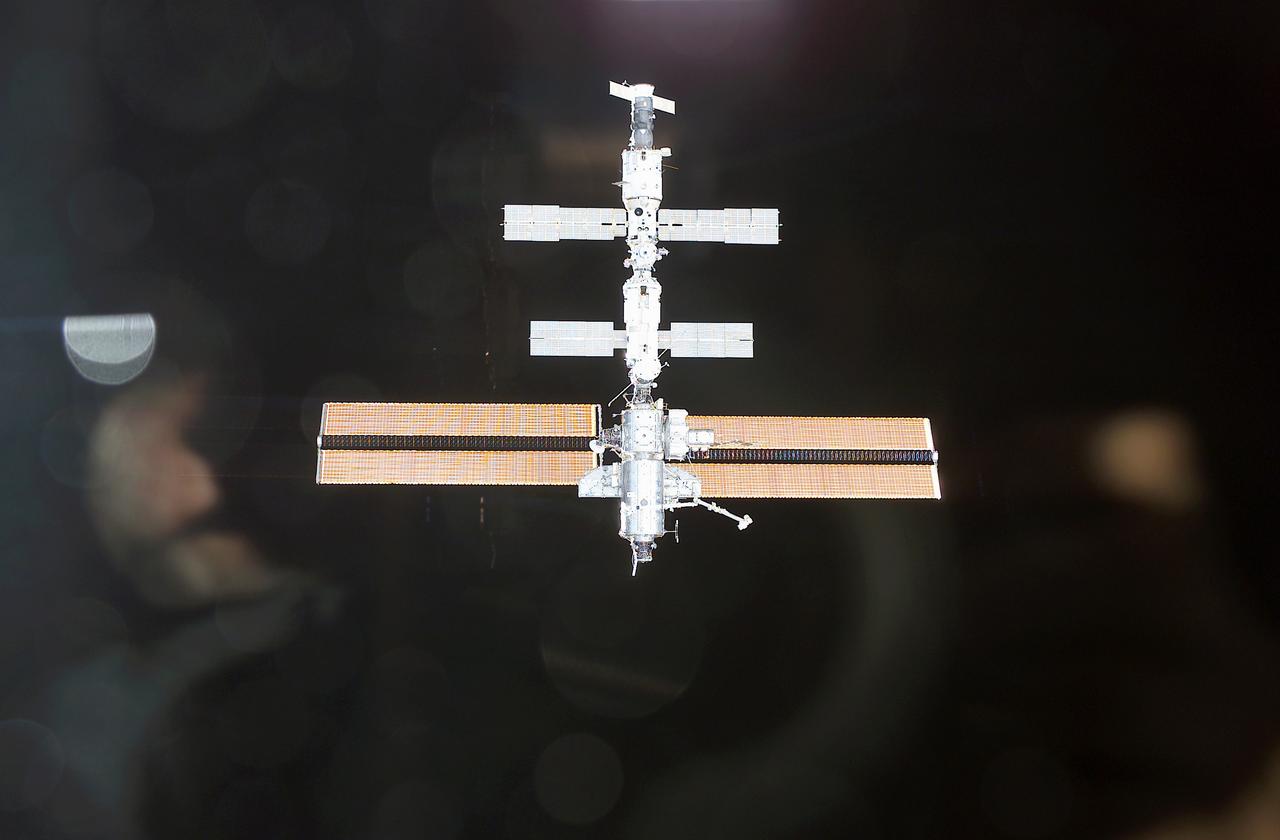
Backdropped against the blackness of space is the International Space Station (ISS), as viewed from the approching Space Shuttle Orbiter Endeavour, STS-111 mission, in June 2002. Expedition Five replaced Expedition Four crew after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

STS111-E-5238 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.

STS111-E-5183 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
STS111-E-5184 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
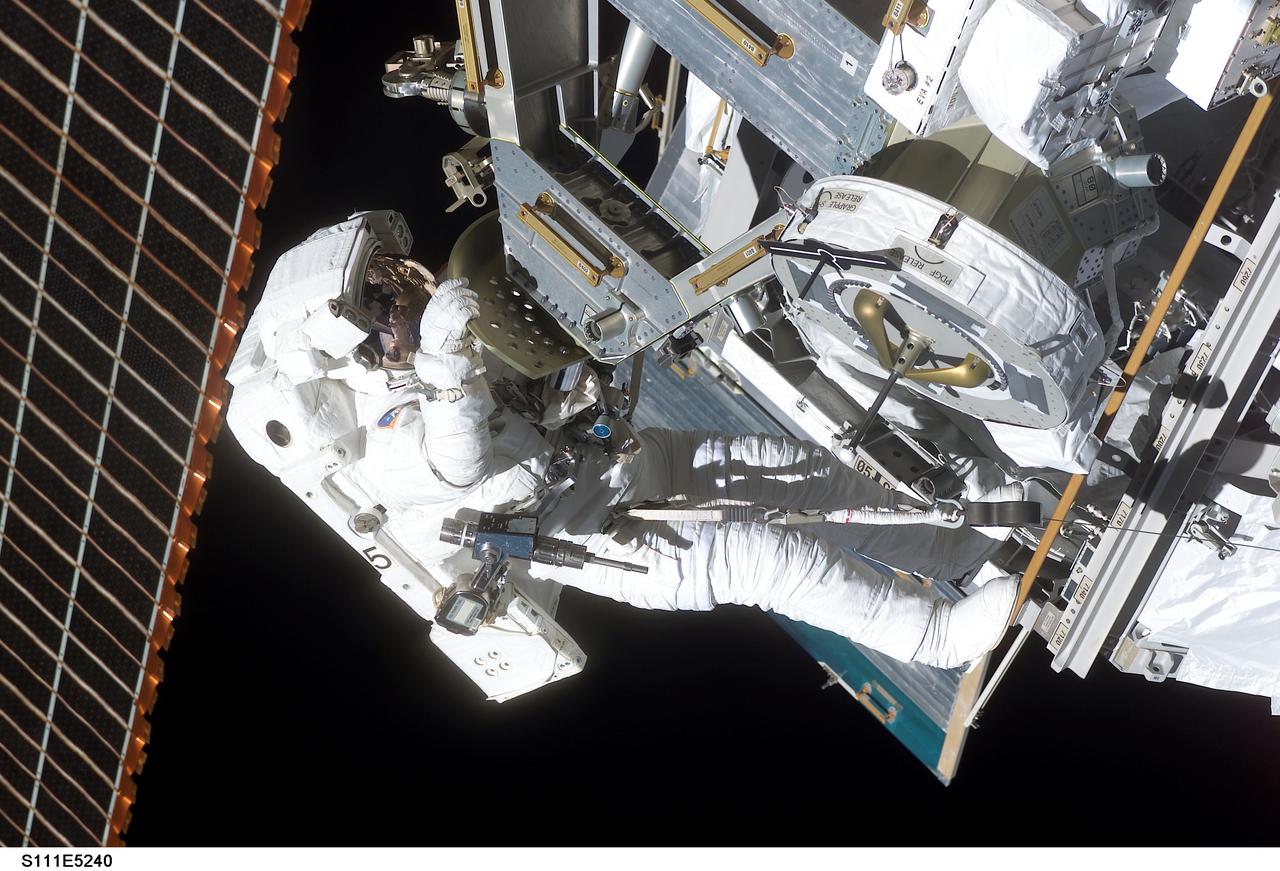
STS111-E-5240 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.

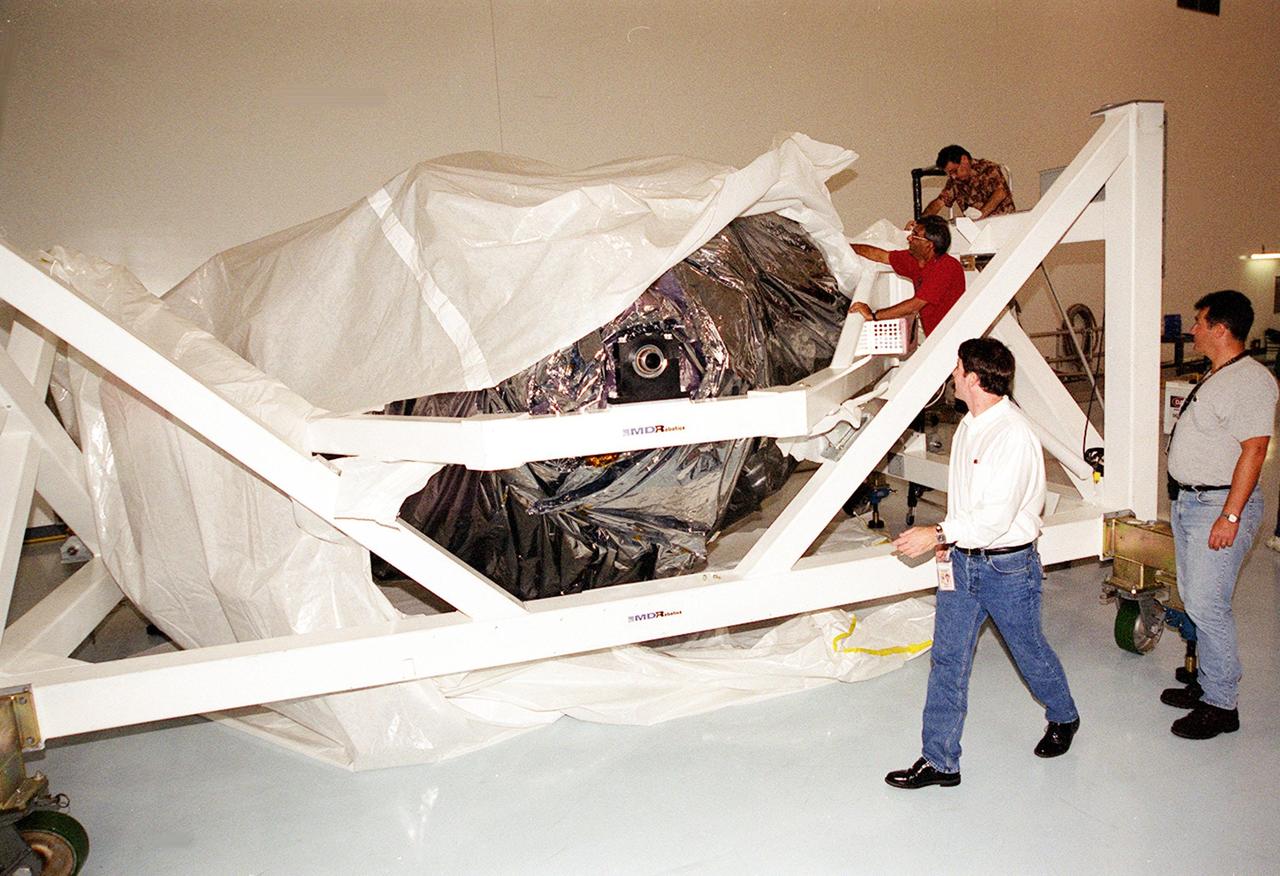
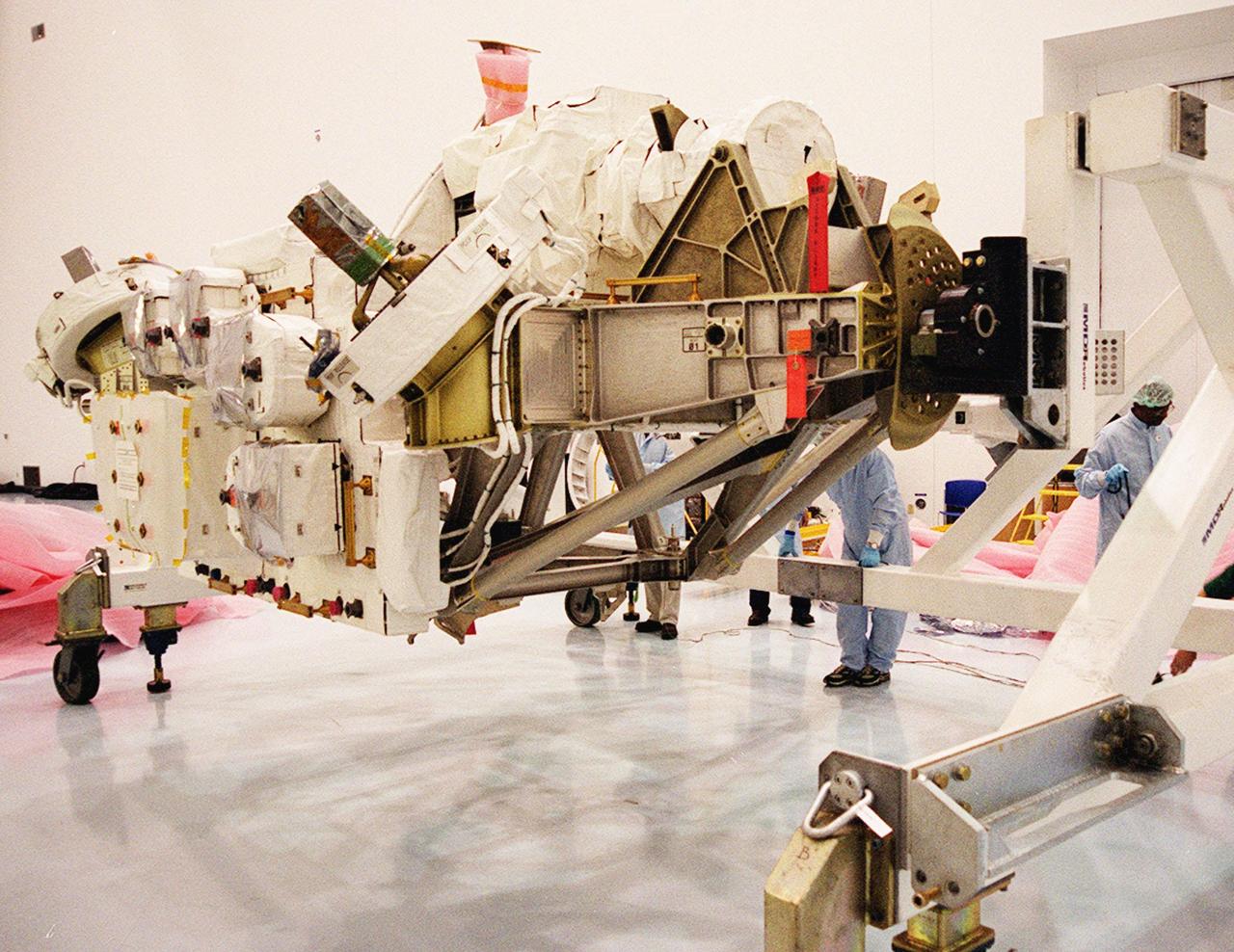
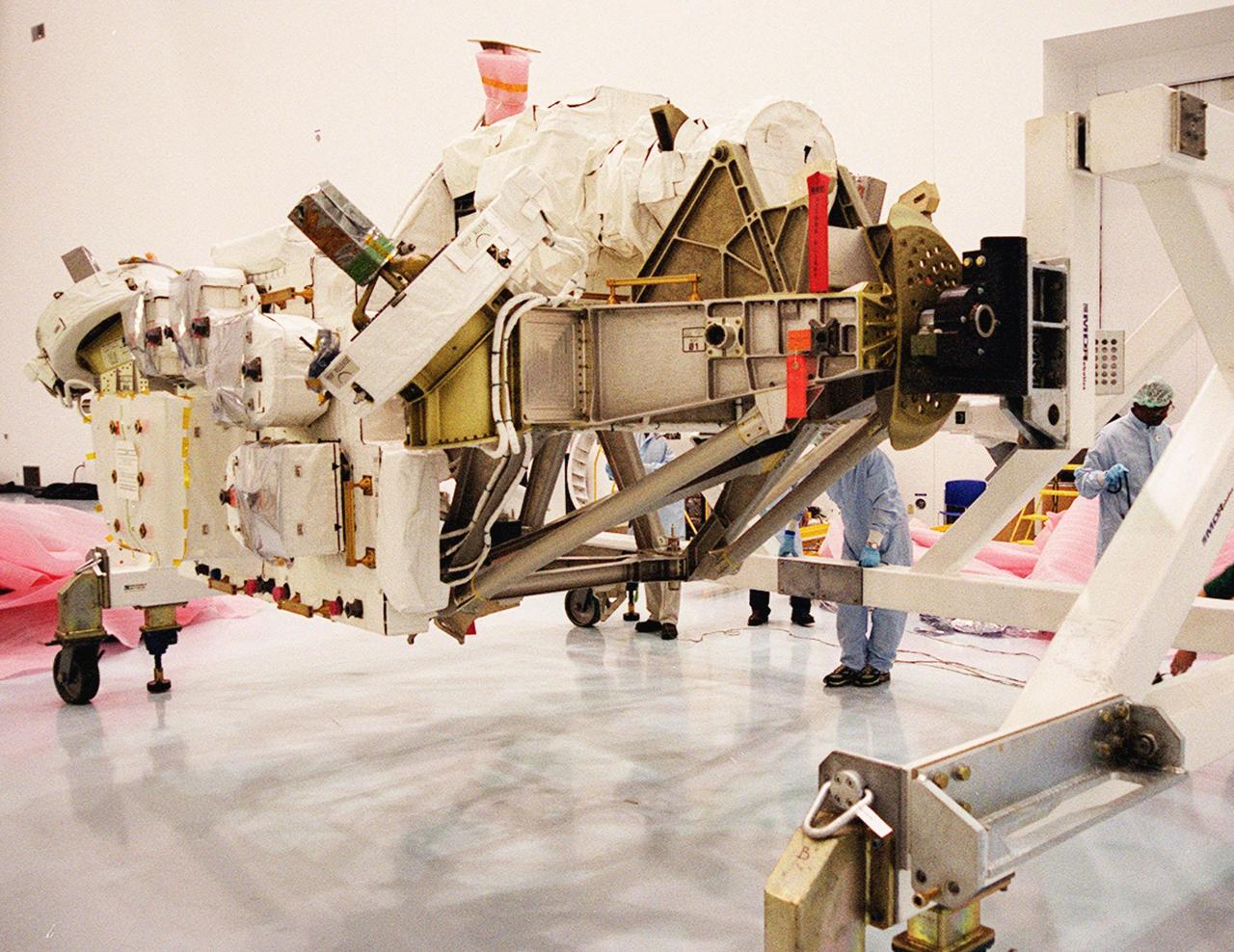
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

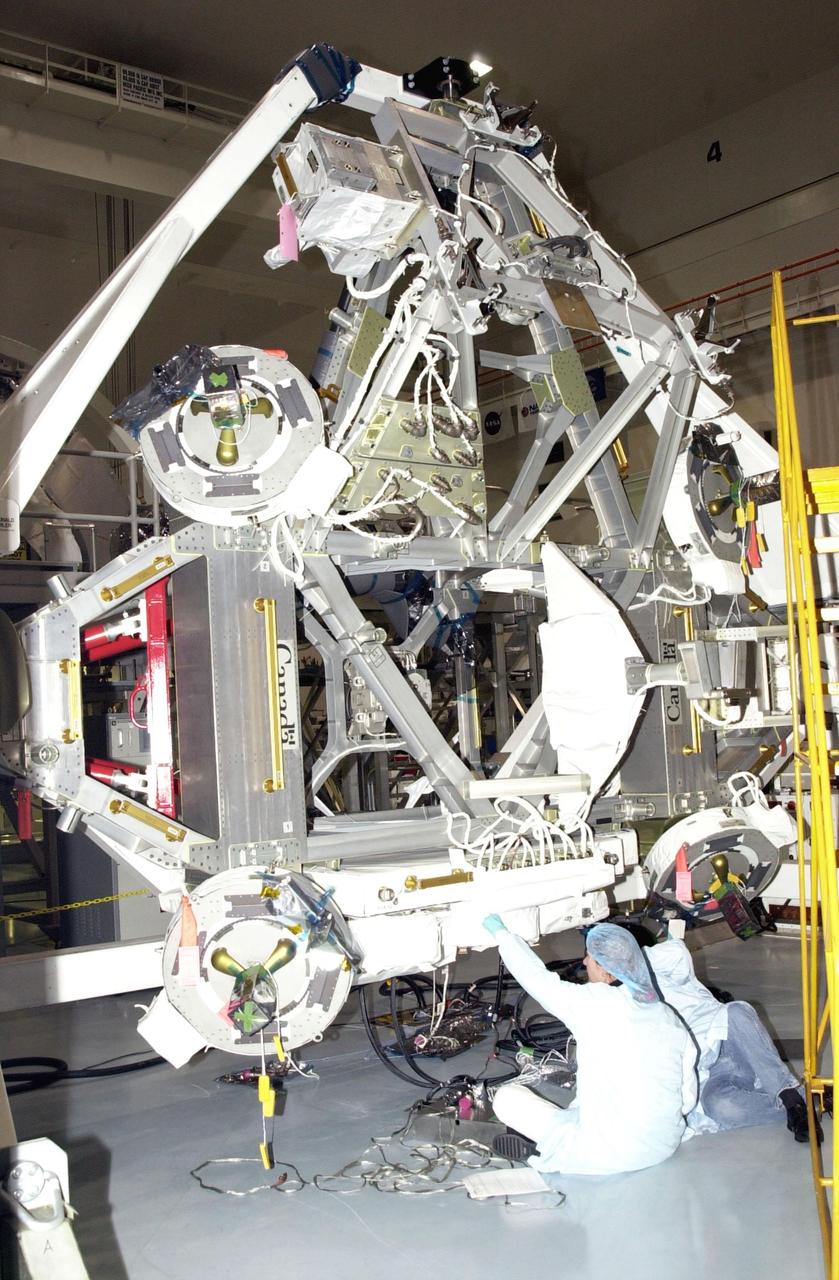
KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
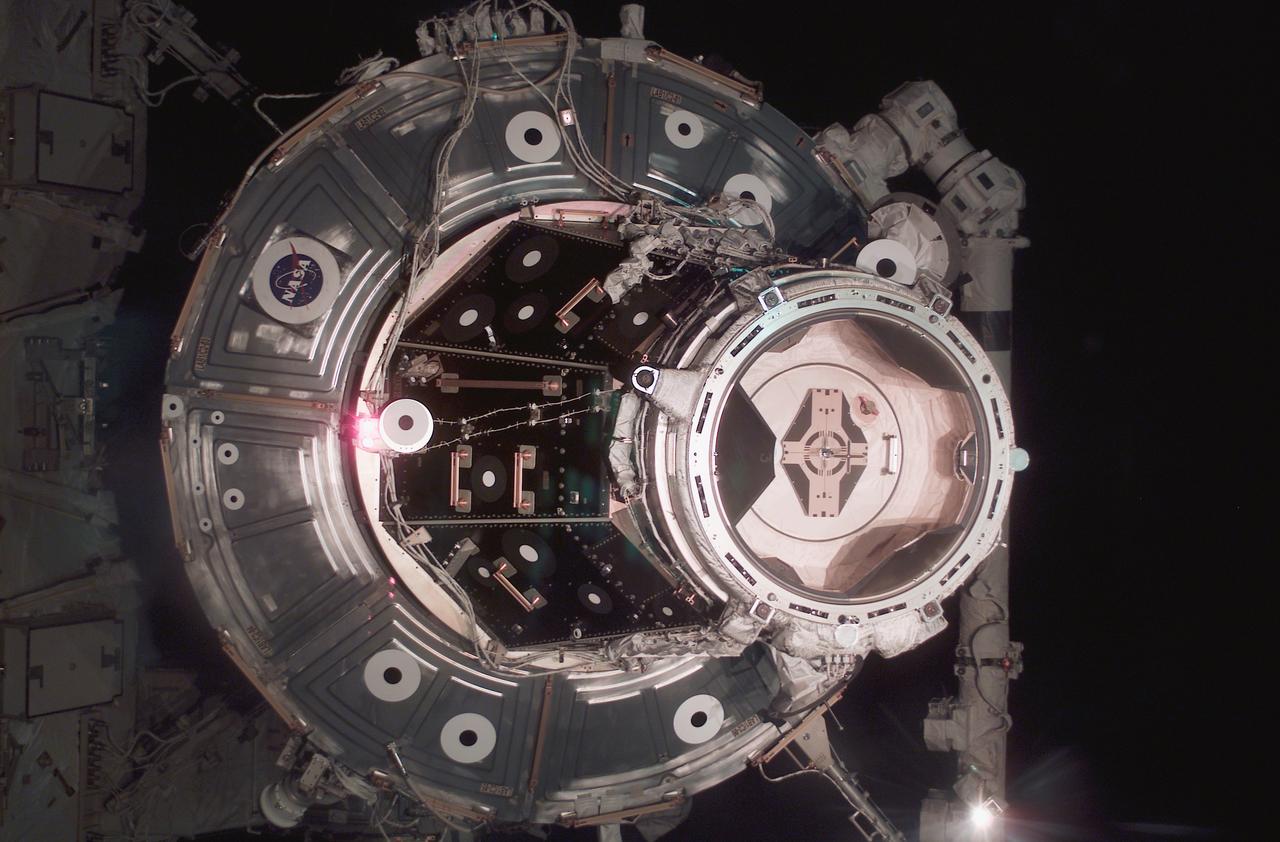
Pictured here is the forward docking port on the International Space Station's (ISS) Destiny Laboratory as seen by one of the STS-111 crewmembers from the Space Shuttle Orbiter Endeavour just prior to docking. In June 2002, STS-111 provided the Space Station with a new crew, Expedition Five, replacing Expedition Four after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of a new platform for the ISS robotic arm, the Mobile Base System (MBS) which is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments form the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility, workers prepare to remove the lid of a container holding the Mobile Base System (MBS). The MBS is part of the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), which is part of the payload on mission STS-100 to the International Space Station

KENNEDY SPACE CENTER, FLA. -- With the lid removed, the wrapped Mobile Base System (MBS) is revealed inside its transport container. The MBS is part of the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), which is part of the payload on mission STS-100 to the International Space Station

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility, workers prepare to remove the lid of a container holding the Mobile Base System (MBS). The MBS is part of the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), which is part of the payload on mission STS-100 to the International Space Station

KENNEDY SPACE CENTER, FLA. -- With the lid removed, the wrapped Mobile Base System (MBS) is revealed inside its transport container. The MBS is part of the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), which is part of the payload on mission STS-100 to the International Space Station
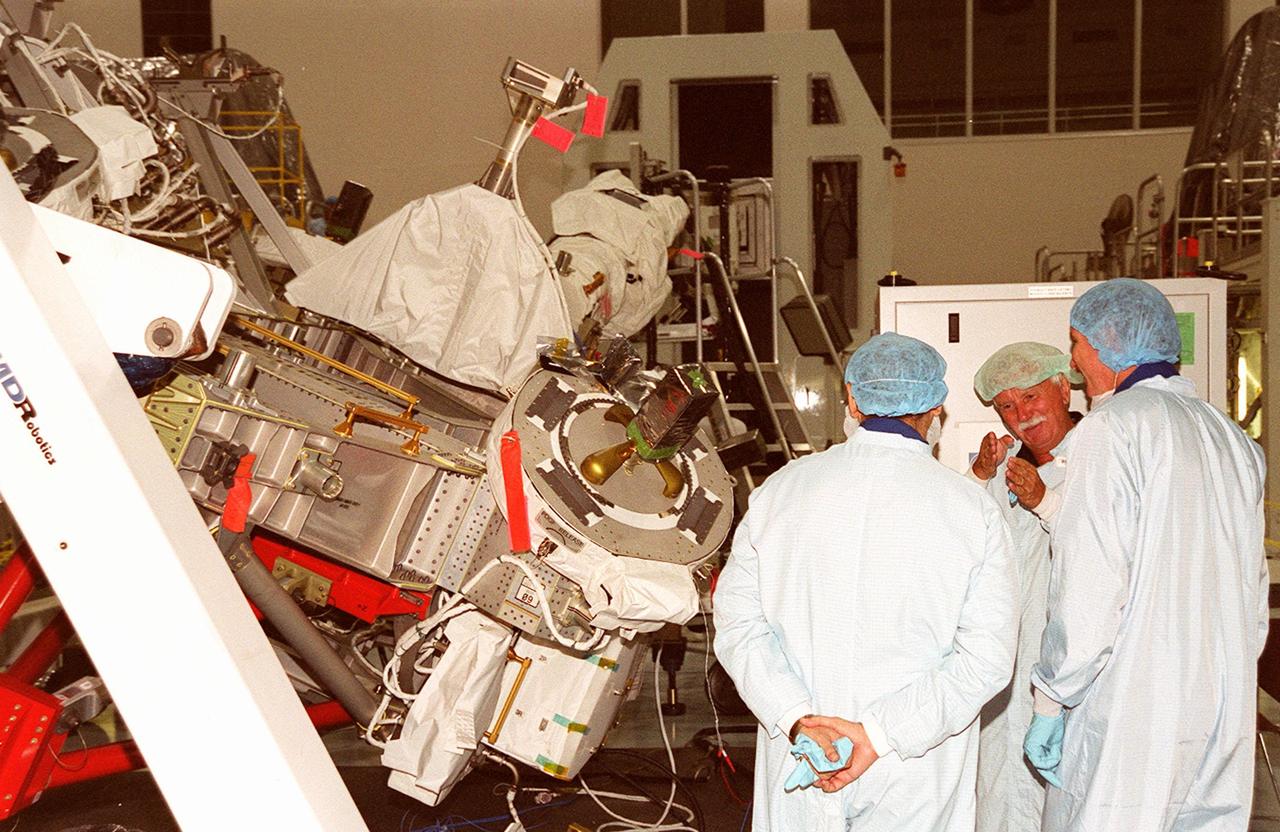
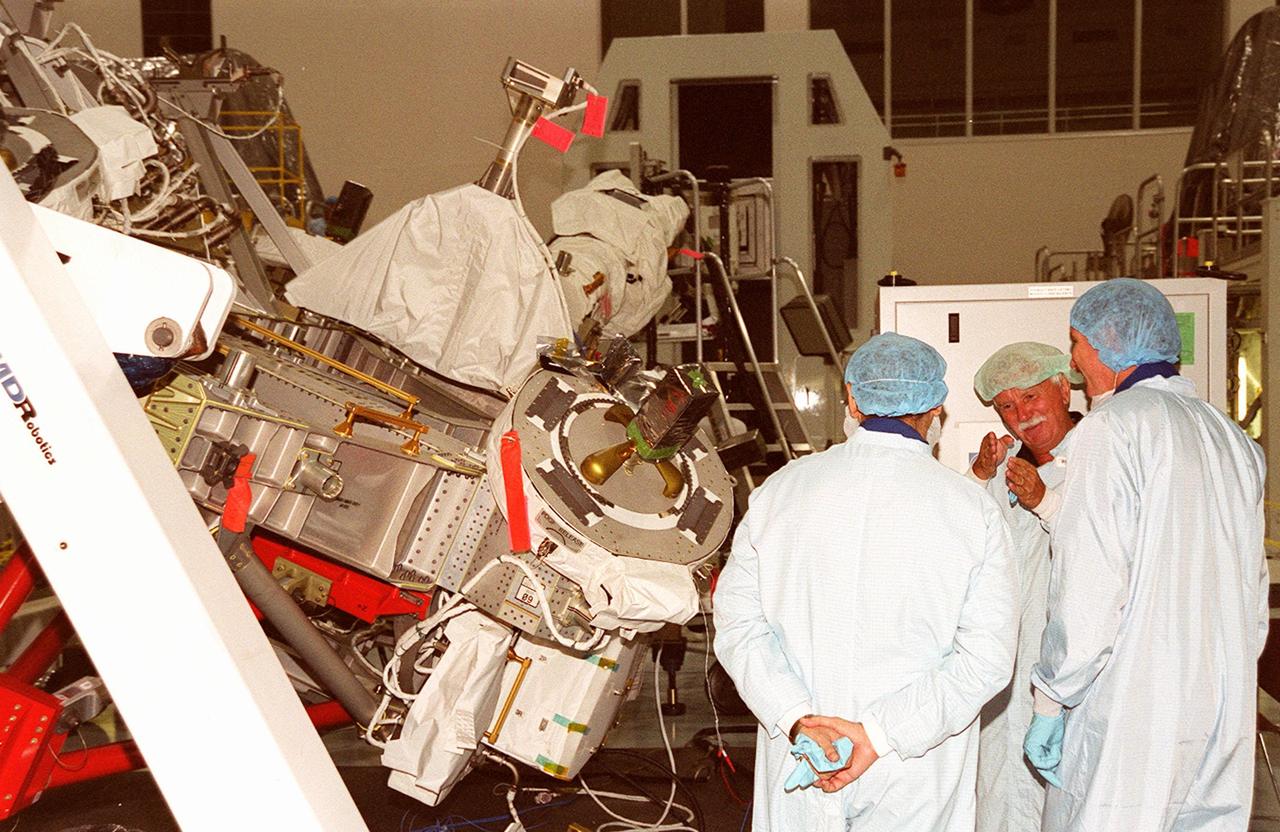
A worker in the Space Station Processing Facility makes a point during discussion of the hardware at left, the Mobile Base System (MBS), with STS-100 crew members. The crew is at KSC for Crew Equipment Interface Test activities. Mission STS-100 is scheduled to launch April 19, 2001, carrying the Space Station Remote Manipulator System (SSRMS), as well as Raffaello, a multi-purpose logistics module. The MBS is part of the SSRMS and will complete the Canadian Mobile Servicing System, or MSS. A mechanical arm, the MBS will have the capability to “inchworm” from the U.S. Lab fixture to the MSS and travel along the truss to work sites on the Space Station. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station
A worker in the Space Station Processing Facility makes a point during discussion of the hardware at left, the Mobile Base System (MBS), with STS-100 crew members. The crew is at KSC for Crew Equipment Interface Test activities. Mission STS-100 is scheduled to launch April 19, 2001, carrying the Space Station Remote Manipulator System (SSRMS), as well as Raffaello, a multi-purpose logistics module. The MBS is part of the SSRMS and will complete the Canadian Mobile Servicing System, or MSS. A mechanical arm, the MBS will have the capability to “inchworm” from the U.S. Lab fixture to the MSS and travel along the truss to work sites on the Space Station. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
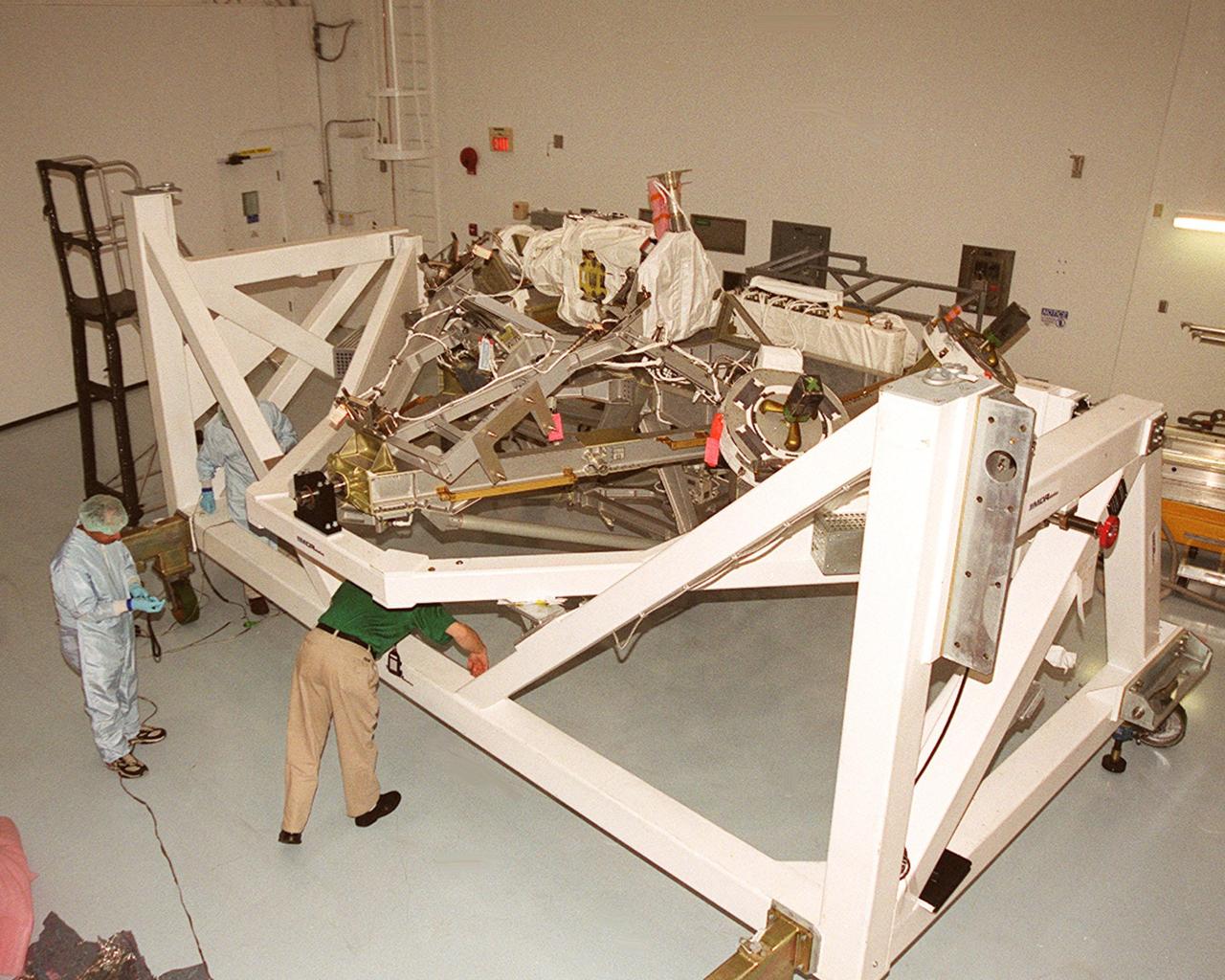
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
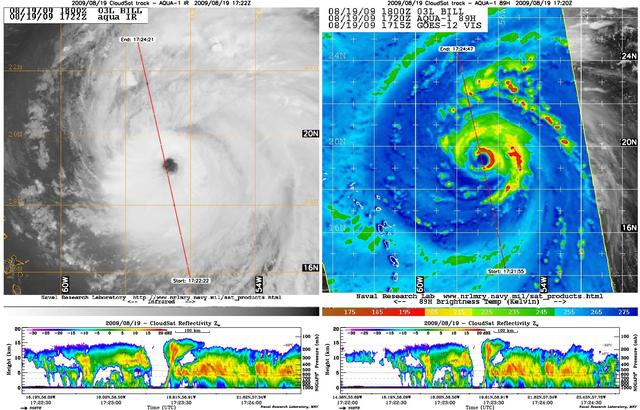
NASA satellite CloudSat captured an extraordinary eye overpass of a category 4 Hurricane Bill on August 19, 2009 at 1720 UTC 1220 EDT. Bill maximum sustained winds are 132 mph 115 knots with a central pressure of 947 mb.

STS111-306-023 (9 June 2002) --- Astronaut Franklin R. Chang-Diaz, STS-111 mission specialist, participates in the first scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the spacewalk, Chang-Diaz and Perrin attached a Power and Data Grapple Fixture onto the International Space Station’s (ISS) P6 Truss, setting the stage for the future relocation of the P6. The next major task was to remove Service Module Debris Panels from Space Shuttle Endeavour’s payload bay and attach them to their temporary location on Pressurized Mating Adapter 1 (PMA-1). The spacewalkers also removed thermal blankets to prepare the Mobile Base System (MBS) for installation onto the station’s Mobile Transporter (MT).

Huddled together in the Destiny laboratory of the International Space Station (ISS) are the Expedition Four crew (dark blue shirts), Expedition Five crew (medium blue shirts) and the STS-111 crew (green shirts). The Expedition Four crewmembers are, from front to back, Cosmonaut Ury I. Onufrienko, mission commander; and Astronauts Daniel W. Bursch and Carl E. Waltz, flight engineers. The ISS crewmembers are, from front to back, Astronauts Kerneth D. Cockrell, mission commander; Franklin R. Chang-Diaz, mission specialist; Paul S. Lockhart, pilot; and Philippe Perrin, mission specialist. Expedition Five crewmembers are, from front to back, Cosmonaut Valery G. Korzun, mission commander; Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. The ISS recieved a new crew, Expedition Five, replacing Expedition Four after a record-setting 196 days in space, when the Space Shuttle Orbiter Endeavour STS-111 mission visited in June 2002. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of the Mobile Base System (MBS), which is an important part of the station's Mobile Servicing System allowing the robotic arm to travel the length of the station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.
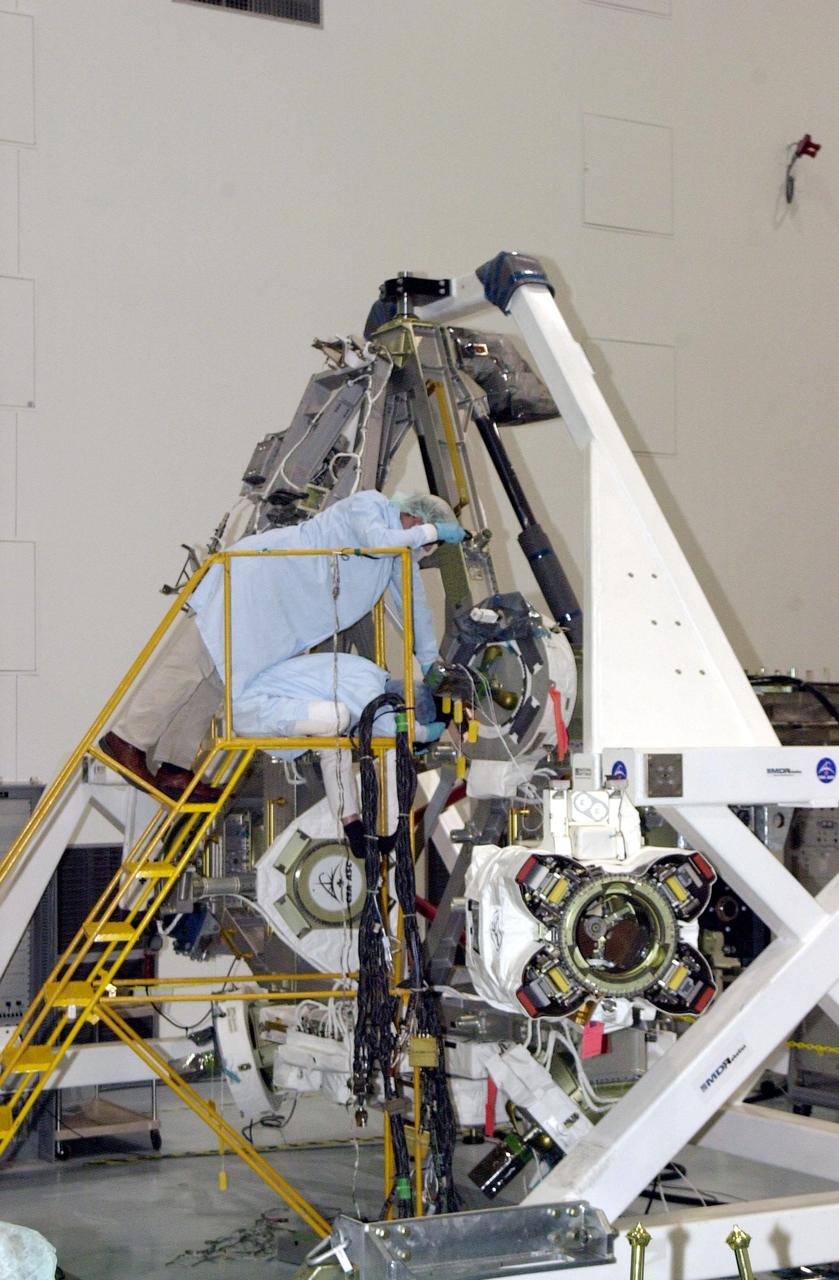
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility check out components of over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart waits for his helmet during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Lockhart's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Philippe Perrin (CNES) smiles during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Perrin's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility look over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell suits up for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Cockrell's fifth Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility look over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility check out components of over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- Expedition 5 cosmonaut Sergei Treschev (RSA) waves as he dons his launch and entry suit for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Treschev's first Shuttle flight. Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour.

KENNEDY SPACE CENTER, FLA. - Launch and entry suits hang in readiness for the STS-111 crew. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour

KENNEDY SPACE CENTER, FLA. - This closeup of Space Shuttle Endeavour shows the cockpit windows just above the name. Extending to the side is the environmental chamber known as the White Room, at the end of the orbiter access arm. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled for 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- The STS-111 crew and Expedition 5 walk eagerly to the Astrovan that will take them to Launch Pad 39A for a simulated countdown. From left are Mission Specialists Philippe Perrin and Franklin Chang-Diaz; the Expedition 5 crew, Sergei Treschev, Peggy Whitson and Valeri Korzun; Pilot Paul Lockhart; and Commander Kenneth Cockrell. The simulation is part of STS-111 Terminal Countdown Demonstration Test activities for the crew and Expedition 5. The payload on the mission to the International Space Station includes the Mobile Base System (MBS), an Orbital Replacement Unit and Multi-Purpose Logistics Module Leonardo. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, enabling Canadarm 2 to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. The Expedition 5 crew is traveling on Endeavour to replace the Expedition 4 crew on the Station. Launch of Endeavour is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Expedition 5 Commander Valeri Korzun (RSA), left, talks with astronaut Tracy Caldwell during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Korzun's 2nd Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, Fla. -- The STS-111 crew pause before departing KSC for Houston. The crew spent time in the Space Station Processing Facility for training on the payload they will be transporting: The Mobile Base System (MBS). Standing left to right are Pilot Paul Lockhart, Commander Ken Cockrell and Mission Specialists Phillippe Perrin, with the French space agency CNES, and Franklin Chang-Diaz. During the mission, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the Truss to work sites. The Expedition Five crew will be replacing Expedition Four. Launch of Endeavour on mission STS-111 is scheduled for April 18, 2002

KENNEDY SPACE CENTER, FLA. -- STS-111 Mission Specialist Franklin Chang-Diaz suits up for launch, scheduled at 7:44 p.m. EDT, May 30, 2002. This is his seventh Shuttle flight, only the second astronaut to achieve that number. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour

KENNEDY SPACE CENTER, FLA. - Expedition 5 astronaut Peggy Whitson smiles as she dons her launch and entry suit for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is her first Shuttle flight. Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour.

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

STS111-E-5226 (11 June 2002) --- Astronaut Franklin R. Chang-Diaz, STS-111 mission specialist, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Chang-Diaz and Perrin completed installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter.
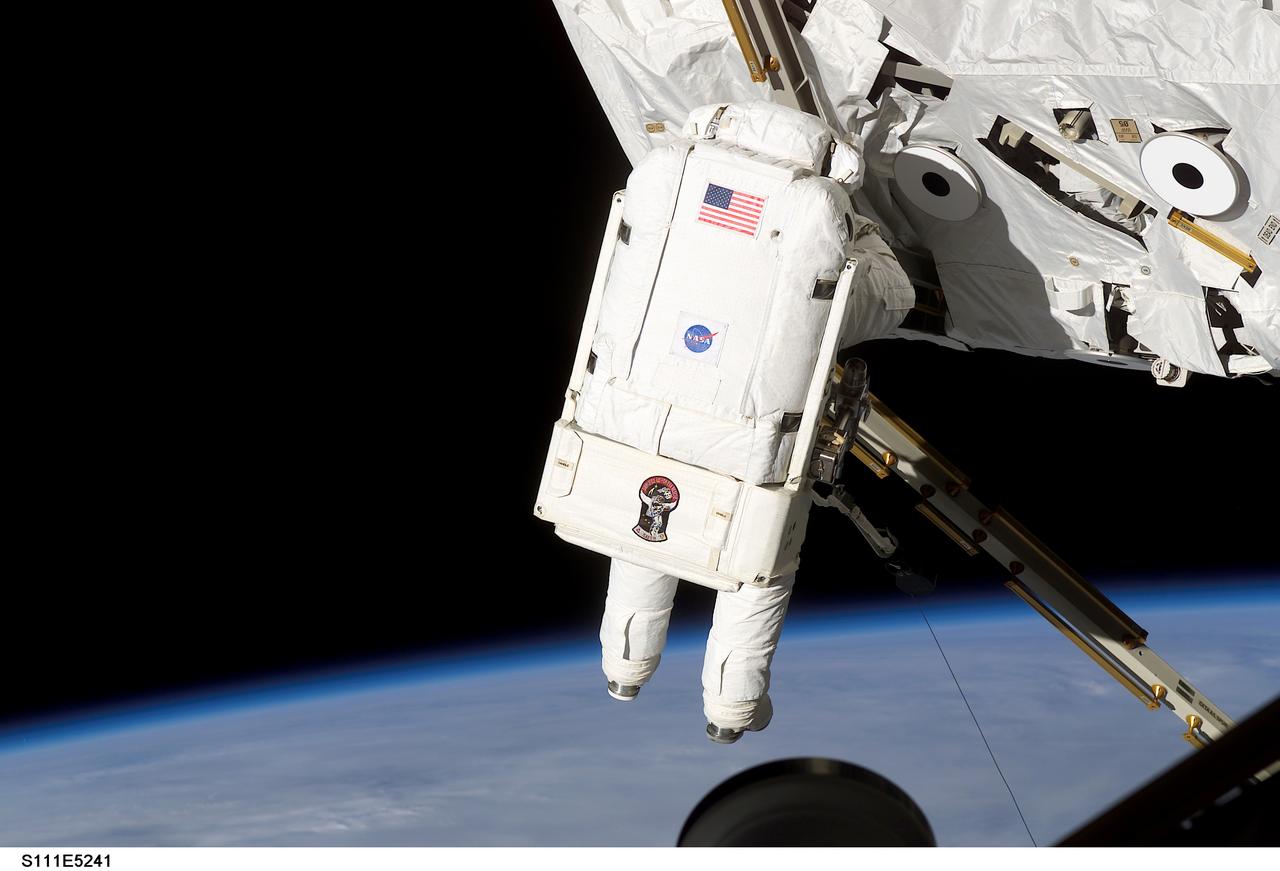
STS111-E-5241 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, photographed near the S0 (S-Zero) Truss on the International Space Station (ISS), participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Perrin and Chang-Diaz completed installation of the Mobile Remote Servicer Base System (MBS) on the station’s railcar, the Mobile Transporter. Perrin represents CNES, the French Space Agency.

ISS018-E-010564 (5 Dec. 2008) --- Astronaut Michael Fincke, Expedition 18 commander, uses a computer at the robotics work station in the Destiny laboratory of the International Space Station. Using the station's robotic arm, Fincke and astronaut Sandra Magnus (out of frame), flight engineer, relocated the ESP-3 from the Mobile Base System back to the Cargo Carrier Attachment System on the P3 truss. The ESP-3 spare parts platform was temporarily parked on the MBS to clear the path for the spacewalks during STS-126.

ISS034-E-027317 (10 Jan. 2013) --- In the Cupola aboard the Earth-orbiting International Space Station, Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works the controls at the Robotic workstation to maneuver the Space Station Remote Manipulator System (SSRMS) or CanadArm2 from its parked position to grapple the Mobile Remote Servicer (MRS) Base System (MBS) Power and Data Grapple Fixture 4 (PDGF-4).

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

ISS018-E-010555 (5 Dec. 2008) --- Astronaut Sandra Magnus, Expedition 18 flight engineer, operates the Canadarm2 from the robotics work station in the Destiny laboratory of the International Space Station. Using the station's robotic arm, Magnus and astronaut Michael Fincke (out of frame), commander, relocated the ESP-3 from the Mobile Base System back to the Cargo Carrier Attachment System on the P3 truss. The ESP-3 spare parts platform was temporarily parked on the MBS to clear the path for the spacewalks during STS-126.
KENNEDY SPACE CENTER, FLA. -- In the Press Site auditorium, NASA Administrator Sean O'Keefe participates in a media briefing following the launch scrub of Space Shuttle mission STS-111. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- Lights define the Fixed Service Structure on Launch Pad 39A where Space Shuttle Endeavour, also bathed in light, sits ready for launch atop the Mobile Launcher Platform. Seen above the orange external tank behind Endeavour is the "beanie cap," or vent hood assembly at the end of the gaseous oxygen vent arm. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled for 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- The STS-111 and Expedition 5 crews look toward spectators as they head for the waiting Astrovan that that will take them to Launch Pad 39A and Space Shuttle Endeavour. From front to back are Pilot Paul Lockhart and Commander Kenneth Cockrell; astronaut Peggy Whitson; Expedition 5 cosmonaut Sergei Treschev (RSA) and Commander Valeri Korzun (RSA); and Mission Specialists Philippe Perrin (CNES) and Franklin Chang-Diaz. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour.

KENNEDY SPACE CENTER, FLA. -- After rollback of the Rotating Service Structure in the early morning hours, Space Shuttle Endeavour sits bathed in light on its Mobile Launcher Platform on Launch Pad 39A. Seen extending to the cockpit area of Endeavour is the orbiter access arm. At the end of the arm is the White Room, an environmental chamber. Below, on either side of Endeavour's tail, are the tail service masts that support fluid, gas and electrical requirements of the orbiter's liquid oxygen and liquid hydrogen aft T-0 umbilicals. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled for 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- STS-111 Mission Specialist Franklin Chang-Diaz suits up again for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart suits up again for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Lockhart's first Shuttle flight. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell gives a thumbs up for a successful launch attempt, the second in six days, aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Cockrell's fifth Shuttle flight. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - After rollback of the Rotating Service Structure, Space Shuttle Endeavour is bathed in light. Seen above the orange external tank behind Endeavour is the "beanie cap," or vent hood assembly at the end of the gaseous oxygen vent arm. The orbiter access arm extends to the cockpit area of Endeavour. At the end of the arm is the White Room, , an environmental chamber that provides crew access into the orbiter. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- The STS-111 crew gather for the traditional pre-launch meal before the second launch attempt aboard Space Shuttle Endeavour. Seated left to right are Mission Specialists Franklin Chang-Diaz and Philippe Perrin (CNES); the Expedition 5 crew cosmonauts Sergei Treschev (RSA) and Valeri Korzun (RSA) and astronaut Peggy Whitson; Pilot Paul Lockhart and Commander Kenneth Cockrell. In front of them is the traditional cake. This mission marks the 14th Shuttle flight to the International Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - Expedition 5 cosmonaut Sergei Treschev suits up for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. Expedition 5 will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. This mission marks the 14th Shuttle flight to the International Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- Expedition 5 astronaut Peggy Whitson has a phone call from home during suitup for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. Expedition 5 will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. This mission marks the 14th Shuttle flight to the International Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, Fla. -- The STS-111 crew spend time in the Space Station Processing Facility learning more about the payload they will be transporting: The Mobile Base System (MBS). Standing left to right in the back row are Expedition Five Commander Valeri Kozun, with the Russian Aviation and Space Agency; Mission Specialist Phillippe Perrin, with the French space agency CNES; Pilot Paul Lockhart; trainer Chris Hardcastle; Mission Specialist Franklin Chang-Diaz; and Commander Ken Cockrell. Flanked by trainers in the front row is (center) Peggy Whitson, another of the Expedition Five crew who will ferried to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the Truss to work sites. The Expedition Five crew will be replacing Expedition Four. Launch of Endeavour on mission STS-111 is scheduled for April 18, 2002

KENNEDY SPACE CENTER, FLA. - On Launch Pad 39A at 2:48 a.m. EDT, the Rotating Service Structure (left) begins rolling back from Space Shuttle Endeavour to allow launch preparations. At the lower left corner is seen the driver of one of the motor-driven trucks that move along circular twin rails installed flush with the pad surface. Endeavour rests on the Mobile Launcher Platform that straddles the flame trench below. The trench is 490 feet long, 58 feet wide and 40 feet high. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. - Wearing a cap with the New York Fire Department logo, Expedition 5 Commander Valeri Korzun suits up for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Korzun's first Shuttle flight. Expedition 5 will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. This mission marks the 14th Shuttle flight to the International Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Philippe Perrin, with CNES, suits up again for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Perrin's first Shuttle flight. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- With the Rotating Service Structure (left) rolled back from Space Shuttle Endeavour on Launch Pad 39A, the xenon lights are turned on. Endeavour rests on the Mobile Launcher Platform that straddles the flame trench below. The trench is 490 feet long, 58 feet wide and 40 feet high. Above the orange external tank behind Endeavour is the "beanie cap," or vent hood assembly at the end of the gaseous oxygen vent arm. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- The STS-111 and Expedition 5 crews head for the Astrovan to take them to Launch Pad 39A and the second launch attempt aboard Space Shuttle Endeavour. From left to right, front to back, are Mission Specialists Philippe Perrin (CNES) and Franklin Chang-Diaz; Expedition 5 Commander Valeri Korzun, astronaut Peggy Whitson and cosmonaut Sergei Treschev; Pilot Paul Lockhart and Commander Kenneth Cockrell. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- STS-111 Pilot Paul Lockhart gets his helmet checked during suitup for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Lockhart's first Shuttle flight. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - ST-111 Commander Kenneth Cockrell suits up again for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - The STS-111 and Expedition 5 crews eagerly stride from the Operations and Checkout Building toward the waiting Astrovan that will take them to Launch Pad 39A and Space Shuttle Endeavour. From front to back are Pilot Paul Lockhart and Commander Kenneth Cockrell; astronaut Peggy Whitson and Expedition 5 Commander Valeri Korzun (RSA); cosmonaut Sergei Treschev (RSA); and Mission Specialists Philippe Perrin (CNES) and Franklin Chang-Diaz. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour.

KENNEDY SPACE CENTER, FLA. -- The STS-111 and Expedition 5 crews hurry from the Operations and Checkout Building for a second launch attempt aboard Space Shuttle Endeavour. From front to back are Pilot Paul Lockhart and Commander Kenneth Cockrell; astronaut Peggy Whitson; Expedition 5 Commander Valeri Korzun (RSA) and cosmonaut Sergei Treschev (RSA); and Mission Specialists Philippe Perrin (CNES) and Franklin Chang-Diaz. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. - The STS-111 and Expedition 5 crews eagerly exit from the Operations and Checkout Building for launch aboard Space Shuttle Endeavour. It is the second launch attempt in six days. From front to back are Pilot Paul Lockhart and Commander Kenneth Cockrell; astronaut Peggy Whitson; Expedition 5 Commander Valeri Korzun (RSA) and cosmonaut Sergei Treschev (RSA); and Mission Specialists Philippe Perrin (CNES) and Franklin Chang-Diaz. This mission marks the 14th Shuttle flight to the Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Endeavour will also carry the Expedition 5 crew, who will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- The STS-111 and Expedition 5 crews relax at the traditional crew meal before getting ready for launch. Seated left to right are Mission Specialists Franklin Chang-Diaz and Philippe Perrin (CNES); cosmonauts Sergei Treschev (RSA) and Valeri Korzun (RSA) and astronaut Peggy Whitson, the Expedition 5 crew; Pilot Paul Lockhart and Commander Kenneth Cockrell. In front of them is the traditional cake. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled at 7:44 p.m. EDT, May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Expedition 5 Commander Valeri Korzun suits up again for the second launch attempt aboard Space Shuttle Endeavour on mission STS-111 to the International Space Station. This is Korzun's first Shuttle flight. Expedition 5 will replace Expedition 4 on board the Station. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. This mission marks the 14th Shuttle flight to the International Space Station and the third Shuttle mission this year. Mission STS-111 is the 18th flight of Endeavour and the 110th flight overall in NASA's Space Shuttle program. On mission STS-111, astronauts will deliver the Leonardo Multi-Purpose Logistics Module, the Mobile Base System (MBS), and the Expedition Five crew to the Space Station. During the seven days Endeavour will be docked to the Station, three spacewalks will be performed dedicated to installing MBS and the replacement wrist-roll joint on the Station's Canadarm2 robotic arm. Liftoff is scheduled for 5:22 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- Expedition 5 Commander Valery Korzun (RSA) steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. -- Expedition 5 cosmonaut Sergei Treschev (RSA) steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart steps down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell and Pilot Paul Lockhart step down from the Astrovan outside the crew quarters at the Operations and Checkout Building after returning from Space Shuttle Endeavour at Launch Pad 39A. The launch of STS-111 was scrubbed due to poor weather at KSC. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also on board will be the Expedition Five crew who will replace Expedition Four on the Station. Launch is rescheduled for May 31 at 7:22 p.m. EDT