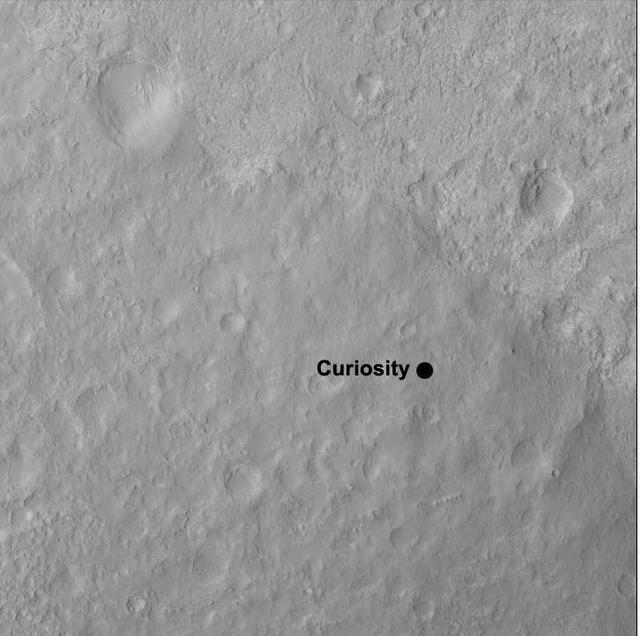
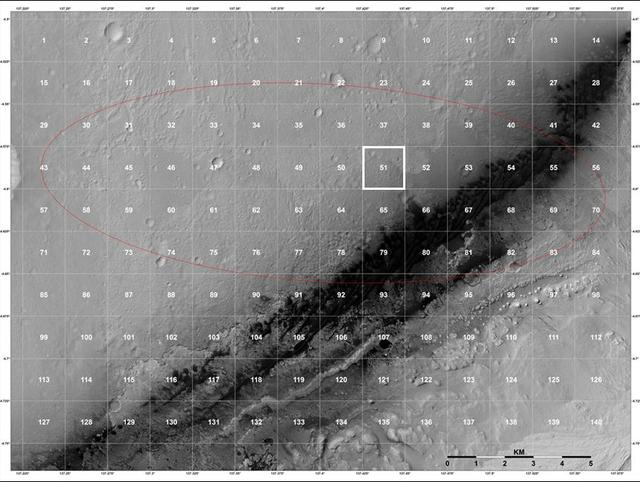
This image shows the quadrangle where NASA Curiosity rover landed, within the expansive Gale Crater. The mission science team has divided the landing region into several square quadrangles, or quads, of interest about 1-mile 1.3-kilometers wide.
This image from an animation is from NASA Mars Reconnaissance Orbiter MRO showing the landing effects of the descent stage, the rover lander, the back shell and parachute, and the heat shield, all found on the left side of the image.
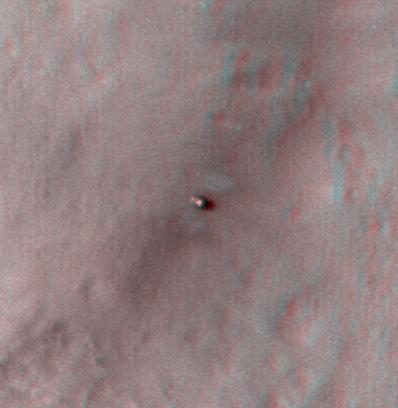
NASA Curiosity Mars rover and its tracks are visible in this view combining information from three observations by the HiRISE camera on NASA Mars Reconnaissance Orbiter. You need 3-D glasses to view this image.
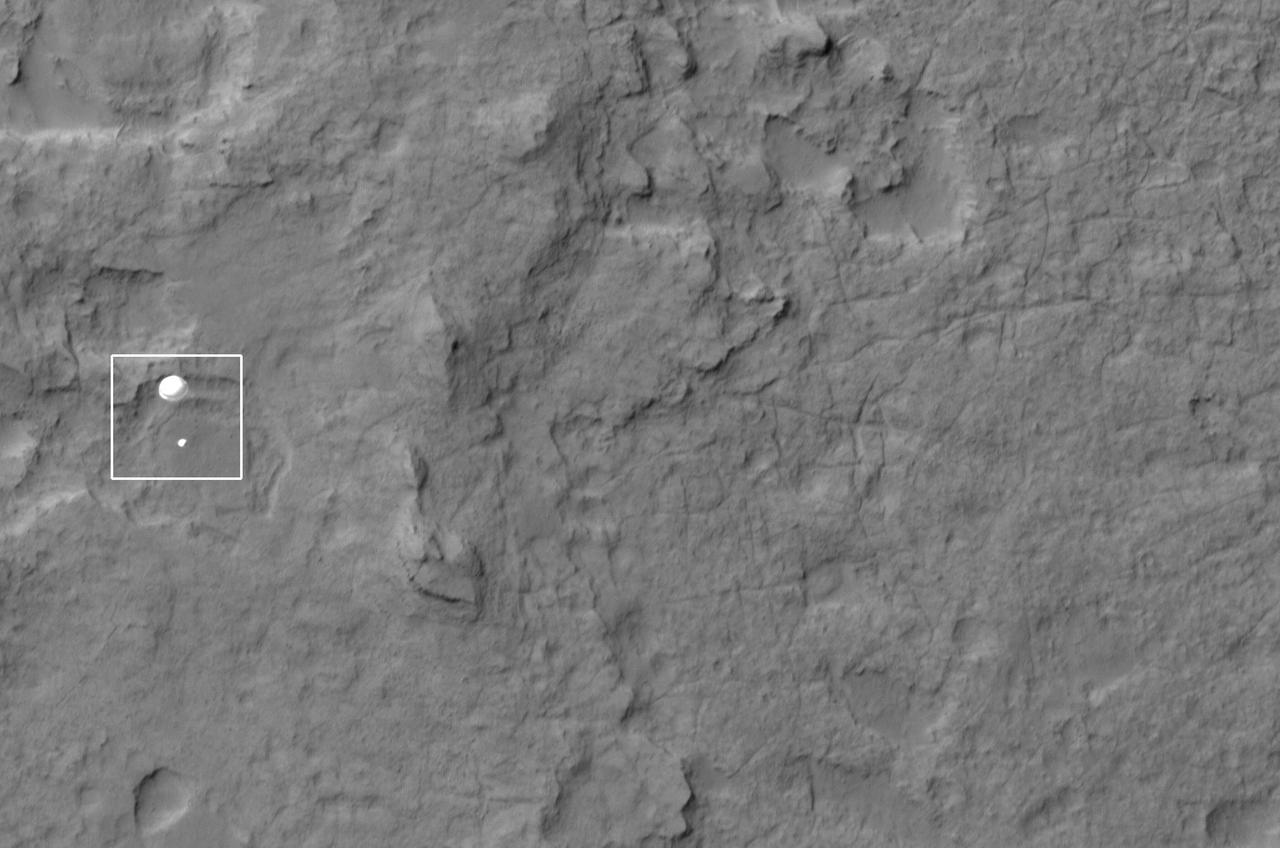
NASA Curiosity rover and its parachute were spotted by NASA Mars Reconnaissance Orbiter as Curiosity descended to the surface on Aug. 5 PDT Aug. 6 EDT. Curiosity and its parachute are in the center of the white box.
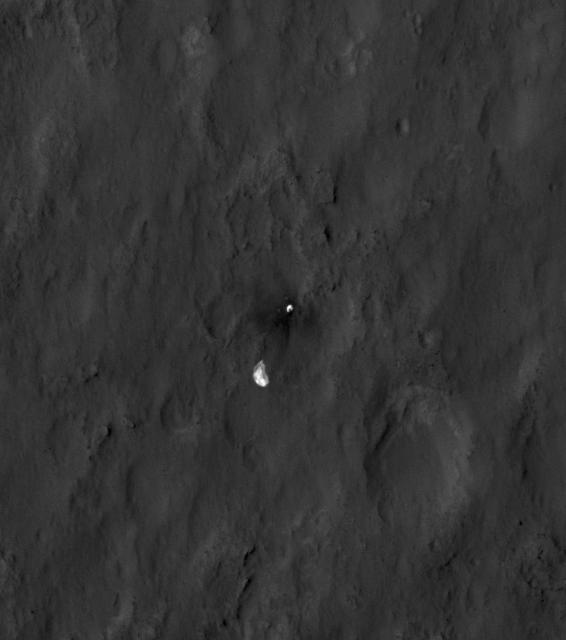
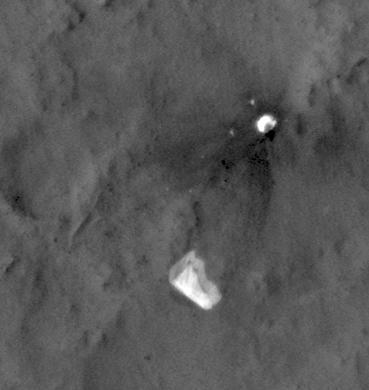
This close-up view shows the rover Curiosity parachute and back shell strewn across the surface of Mars. The image was captured by NASA Mars Reconnaissance Orbiter about 24 hours after the parachute helped guide the rover to the surface.
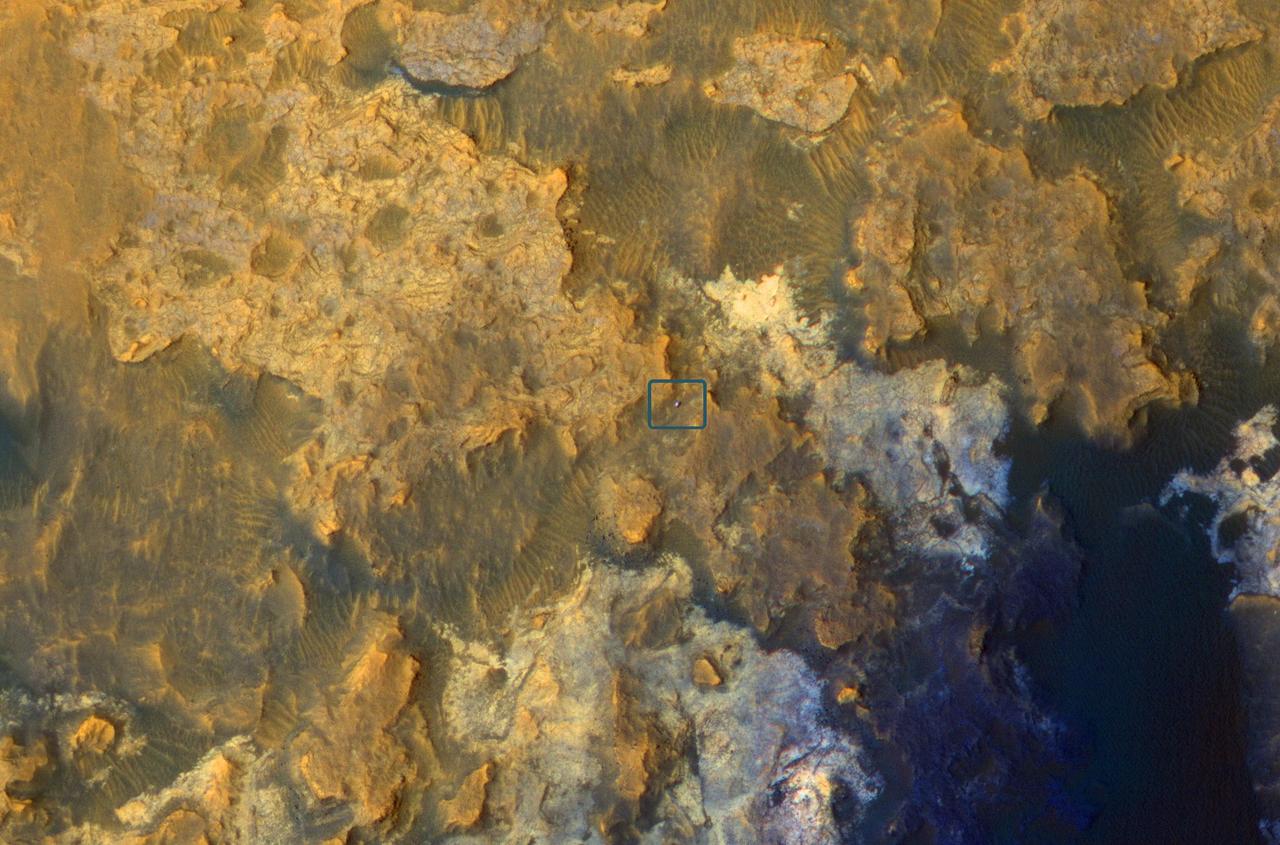
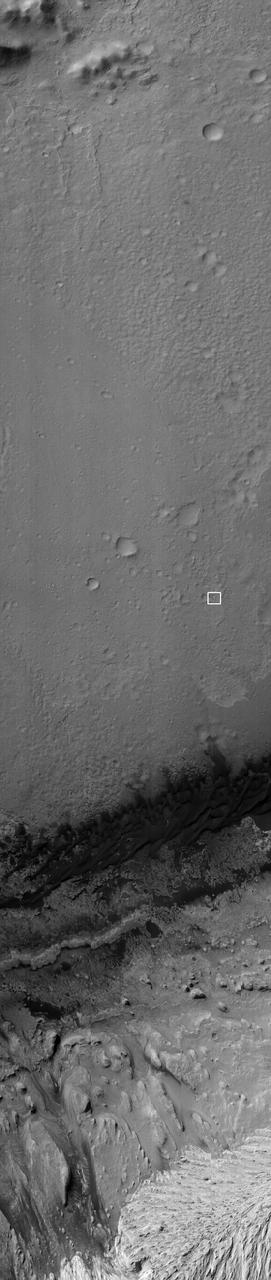
A view from NASA's Mars Reconnaissance Orbiter on April 8, 2015, catches sight of NASA's Curiosity Mars rover passing through a valley called "Artist's Drive" on the lower slope of Mount Sharp. The image is from the orbiter's High Resolution Imaging Science Experiment (HiRISE) camera. It shows the rover's position after a drive of about 75 feet (23 meters) during the 949th Martian day, or sol, of the rover's work on Mars. North is toward the top. The rover's location, with its shadow extending toward the right, is indicated with an inscribed rectangle. The view in this image covers an area about 550 yards (500 meters) across. http://photojournal.jpl.nasa.gov/catalog/PIA19392
The geological context for the landing site of NASA Curiosity rover is visible in this image mosaic obtained by the High-Resolution Imaging Science Experiment HiRISE camera on NASA Mars Reconnaissance Orbiter.
This close-up view shows Curiosity heat shield, which helped the rover survive the harrowing journey through the Martian atmosphere, on the surface of Mars. NASA Mars Reconnaissance Orbiter about 24 hours after landing.
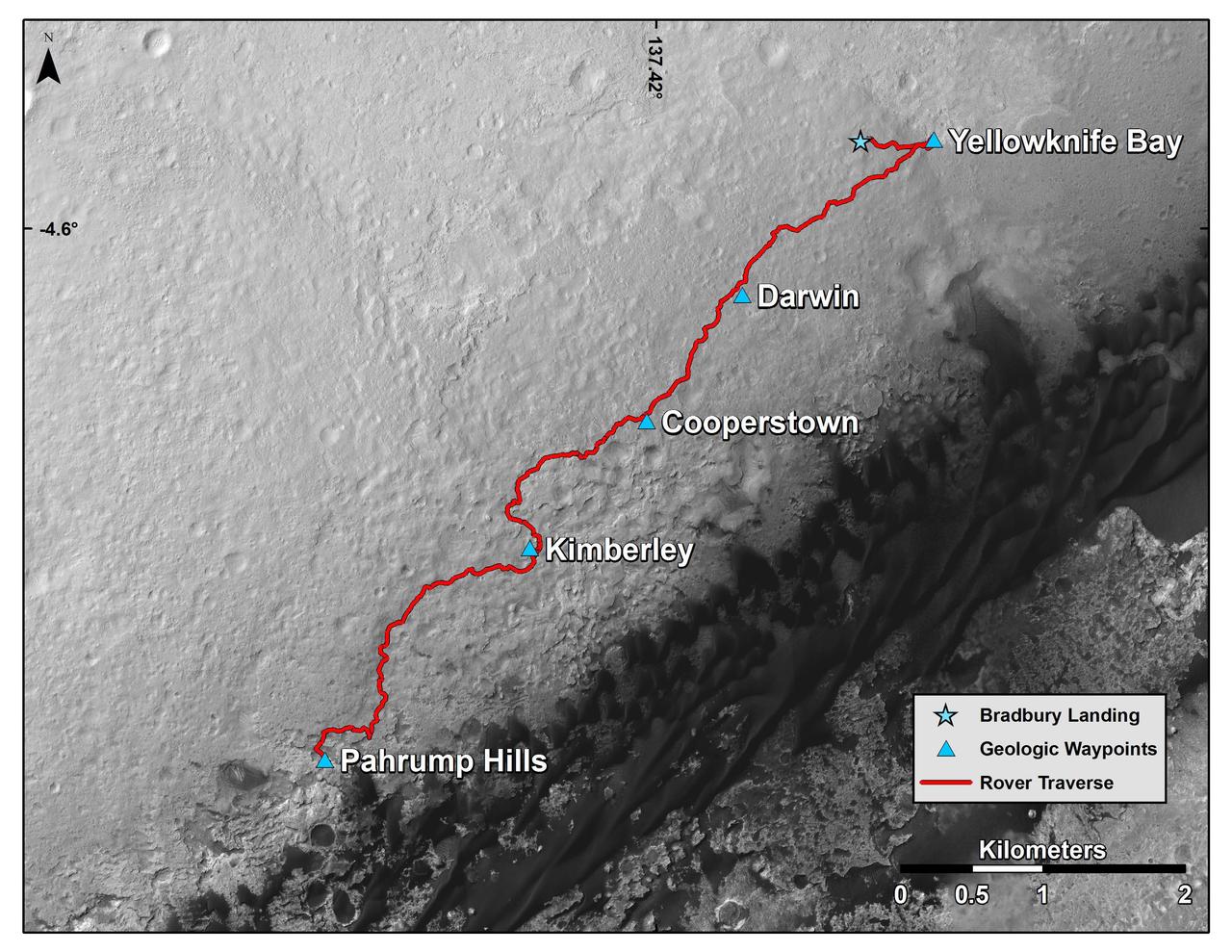
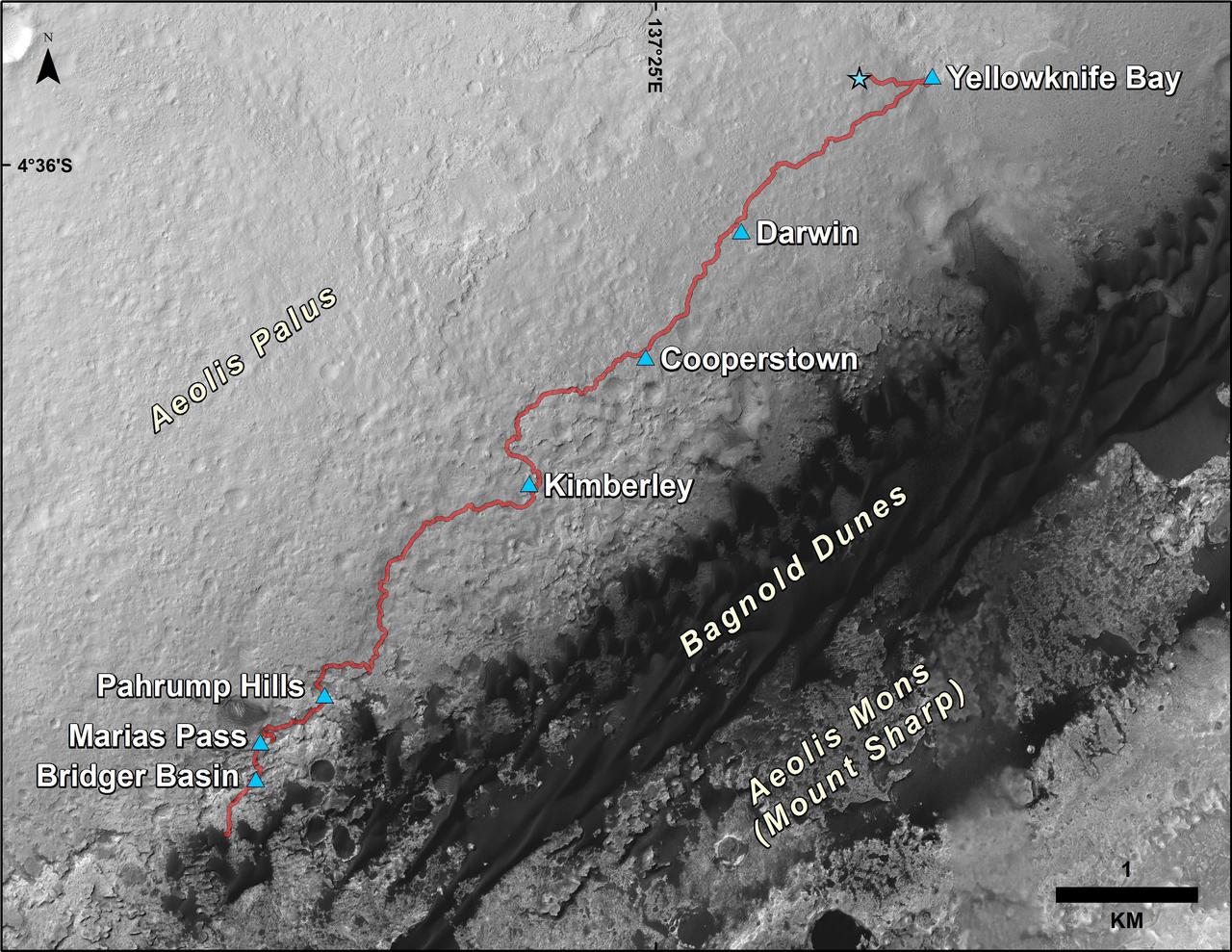
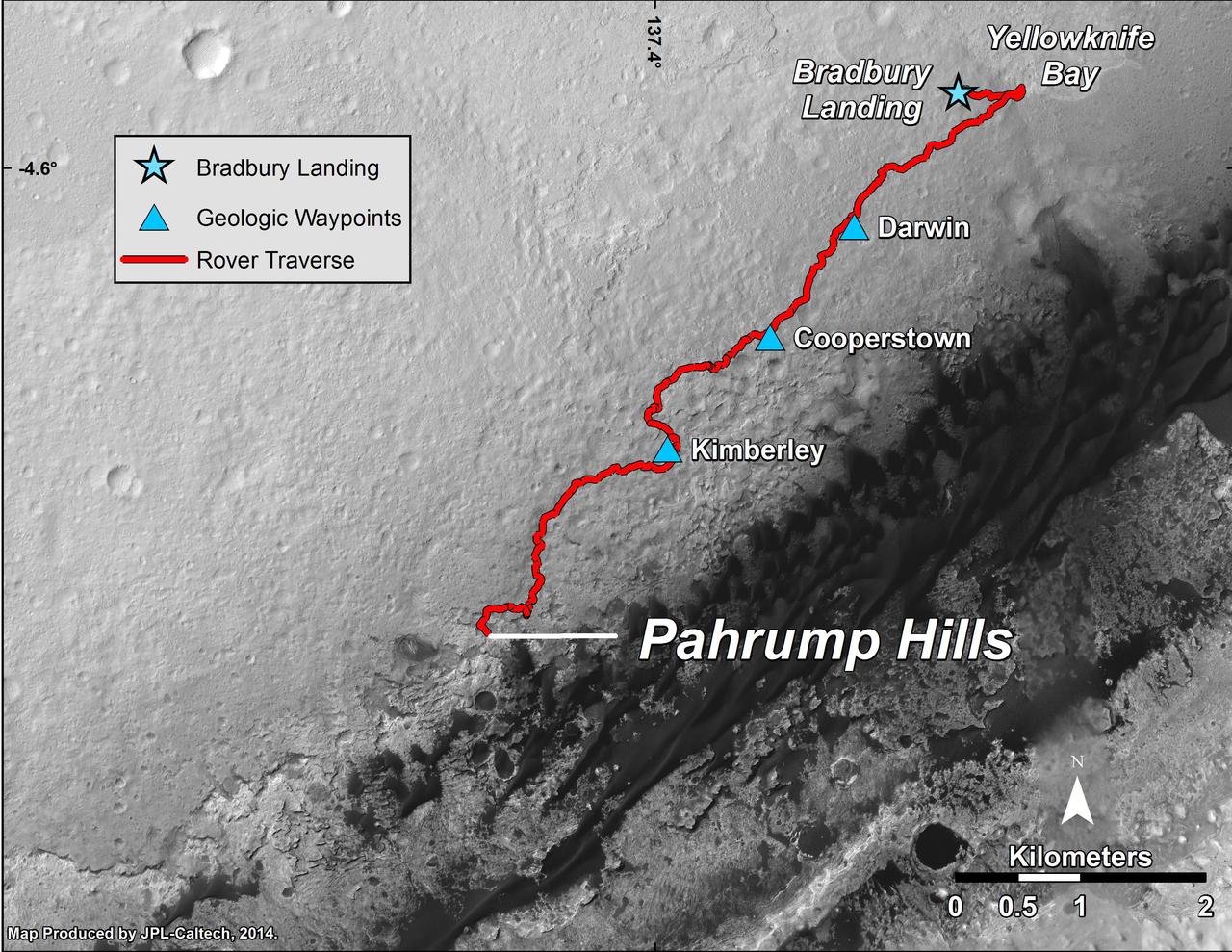
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to the Pahrump Hills outcrop at the base of Mount Sharp.
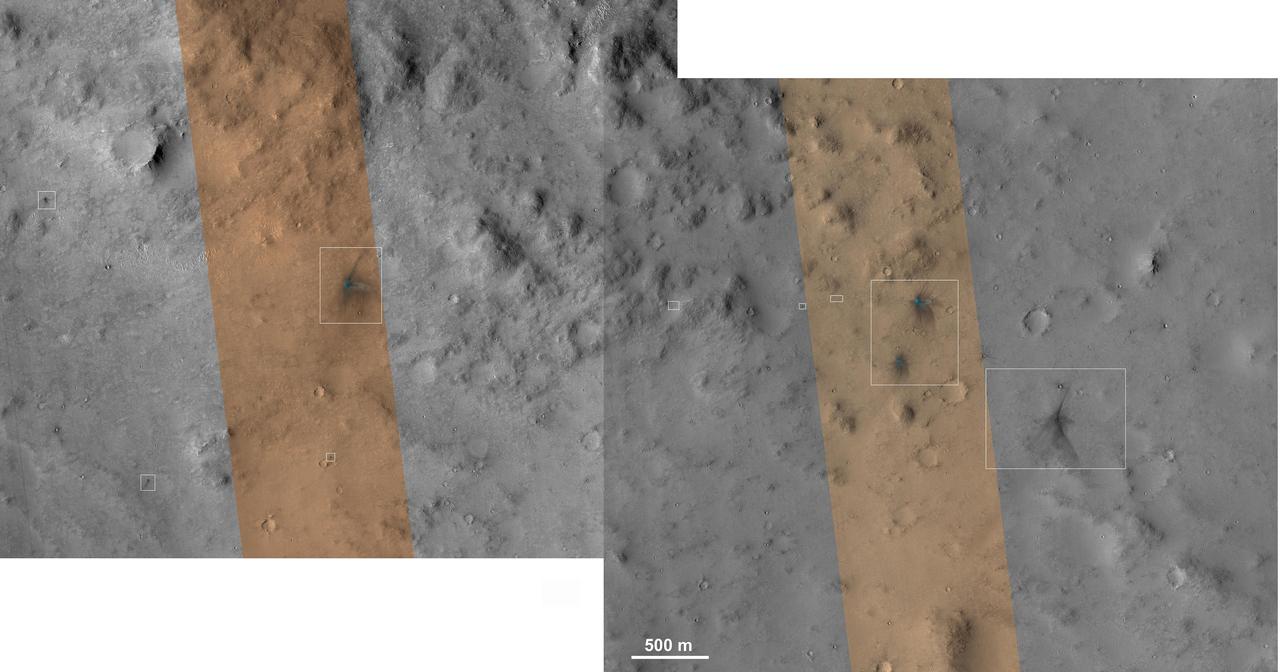
These images from the NASA Mars Reconnaissance Orbiter show several impact scars on Mars made by pieces of the NASA Mars Science Laboratory spacecraft that the spacecraft shed just before entering the Martian atmosphere.

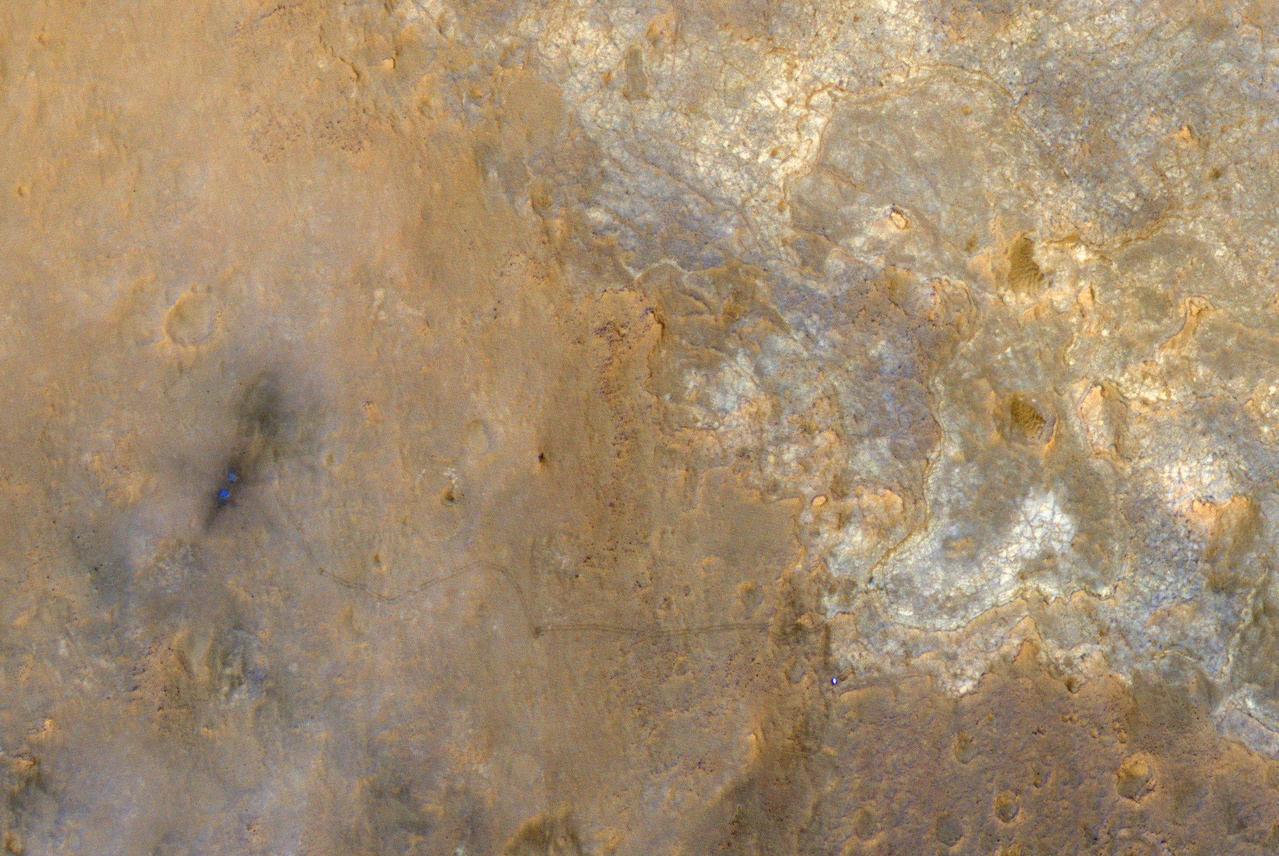
This color-enhanced view, taken by NASA Mars Reconnaissance Orbiter as the satellite flew overhead, shows the terrain around the Curiosity landing site within Gale Crater on Mars. The rover is seen as the circular object.

This image, taken by NASA Mars Reconnaissance Orbiter, shows the transition between the Murray Formation, in which layers are poorly expressed and difficult to trace from orbit, and the hematite ridge, which is made up of continuous layers.
This image, taken NASA Mars Reconnaissance Orbiter, shows distinct bands of alternating tone and brightness within the Murray Formation on Mars. Outcrops like this are common throughout the formation.
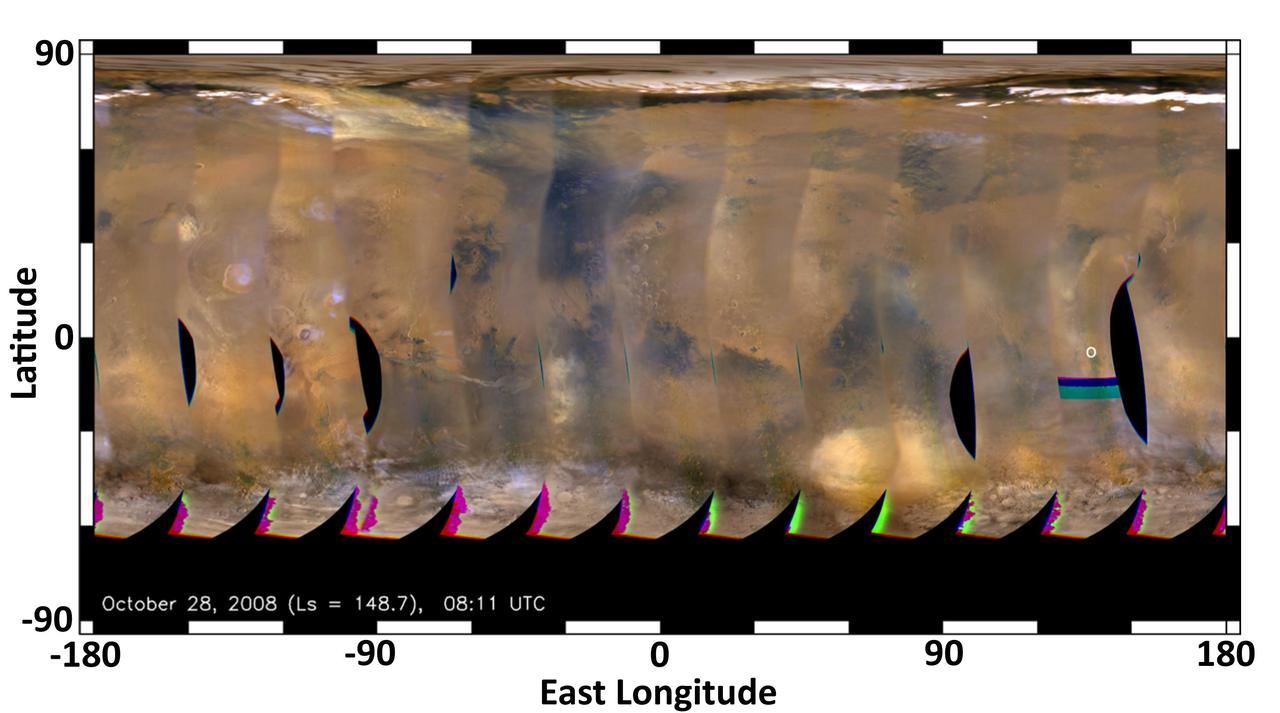
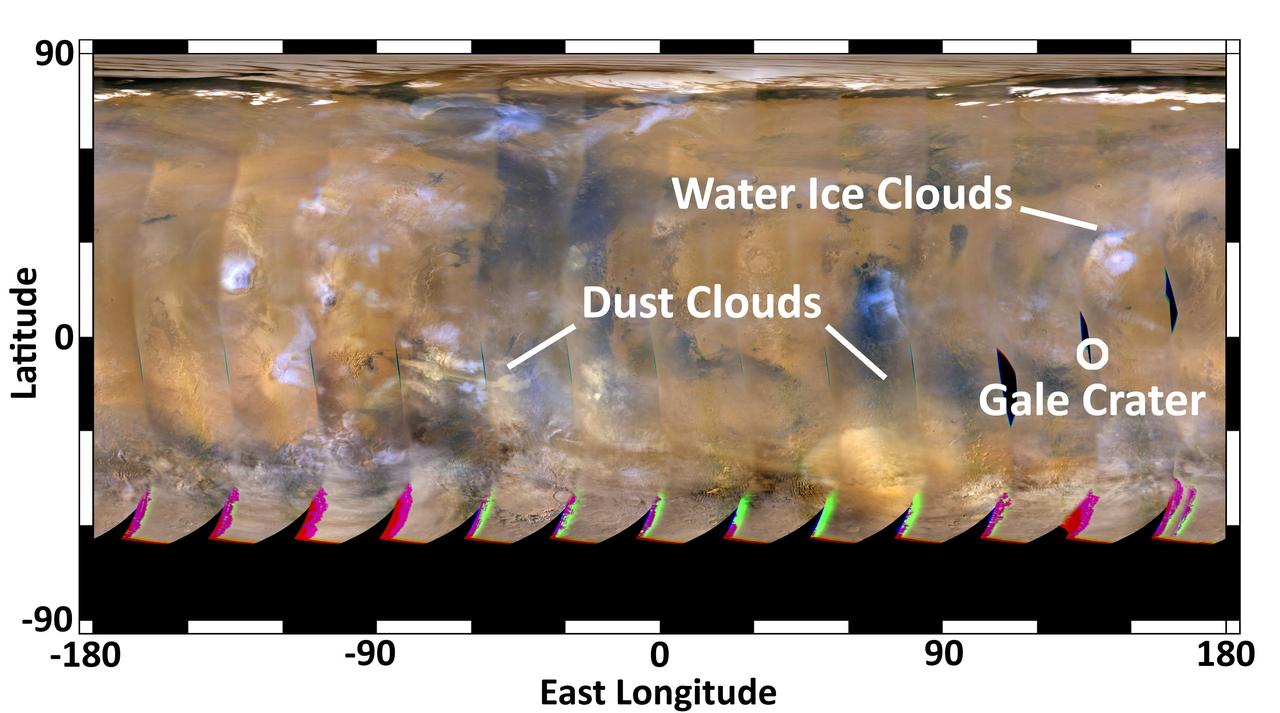
This global map of Mars was acquired on Oct. 28, 2008, by the Mars Color Imager instrument on NASA MRO. One global map is generated each day to forecast weather conditions for the entry, descent and landing of NASA Curiosity rover.
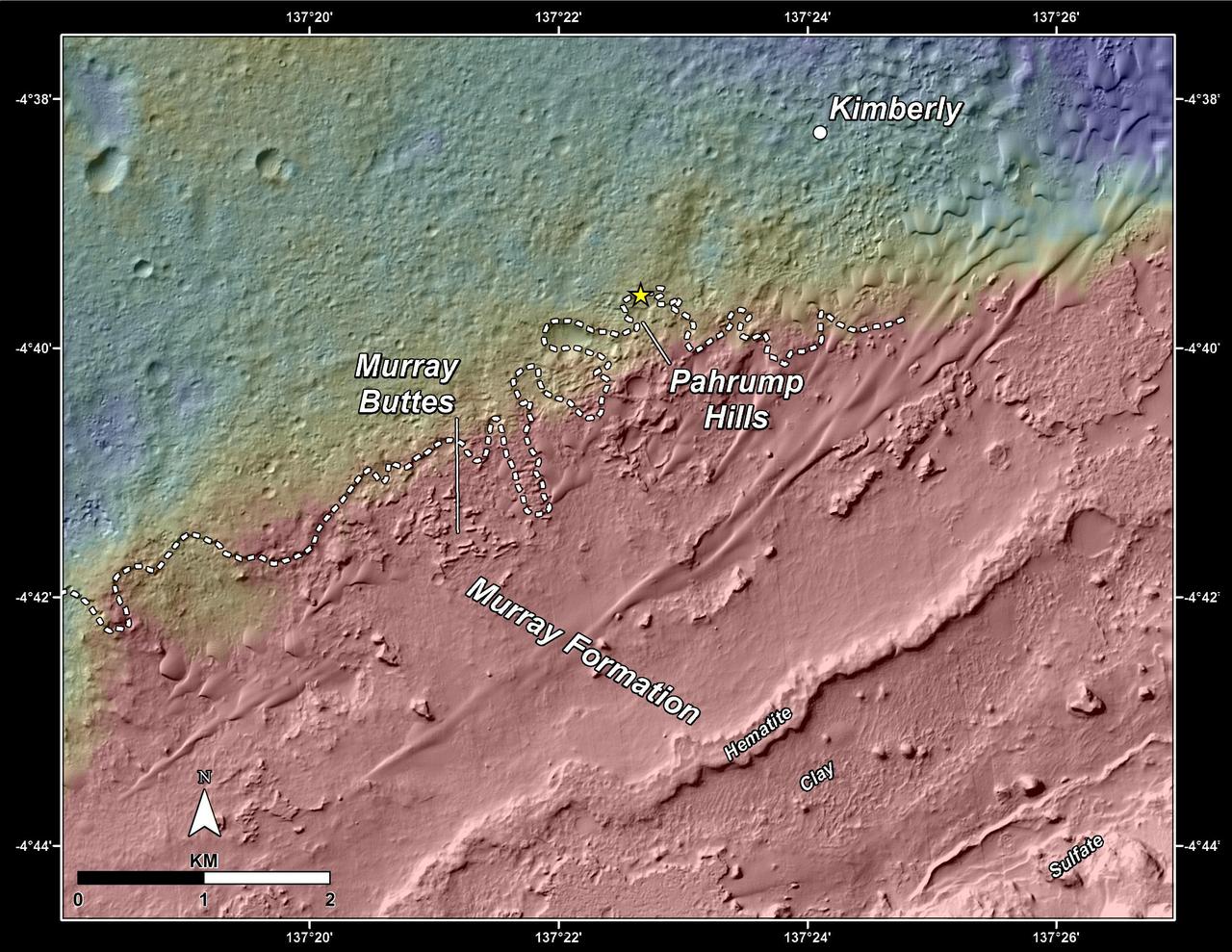
This topography map shows a portion of the Gale Crater region on Mars, where NASA Mars Curiosity rover landed on August 6, 2014. The rover marked with a star is currently headed toward Pahrump Hills.
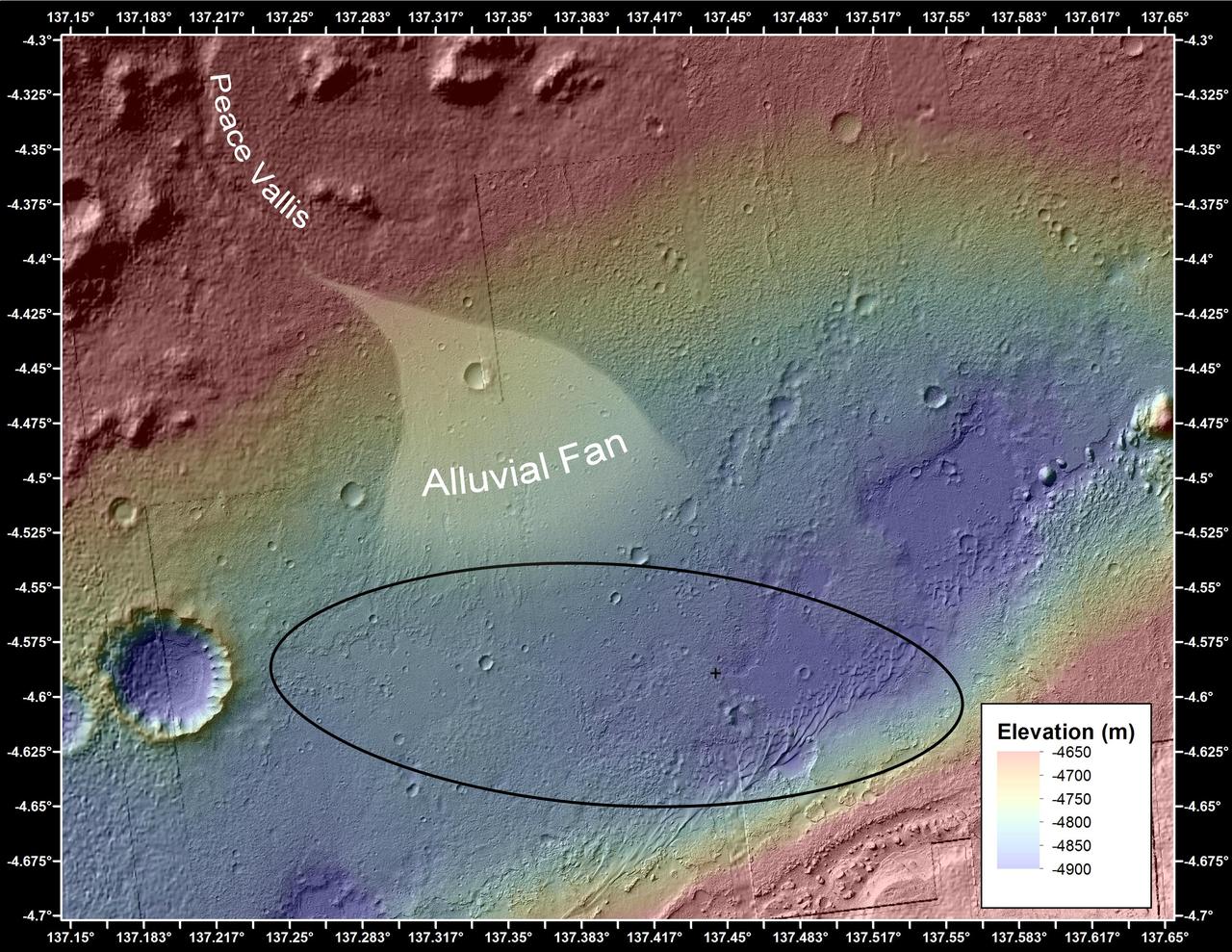
This image shows the topography, with shading added, around the area where NASA Curiosity rover landed. An alluvial fan, or fan-shaped deposit where debris spreads out downslope, has been highlighted in lighter colors for better viewing.

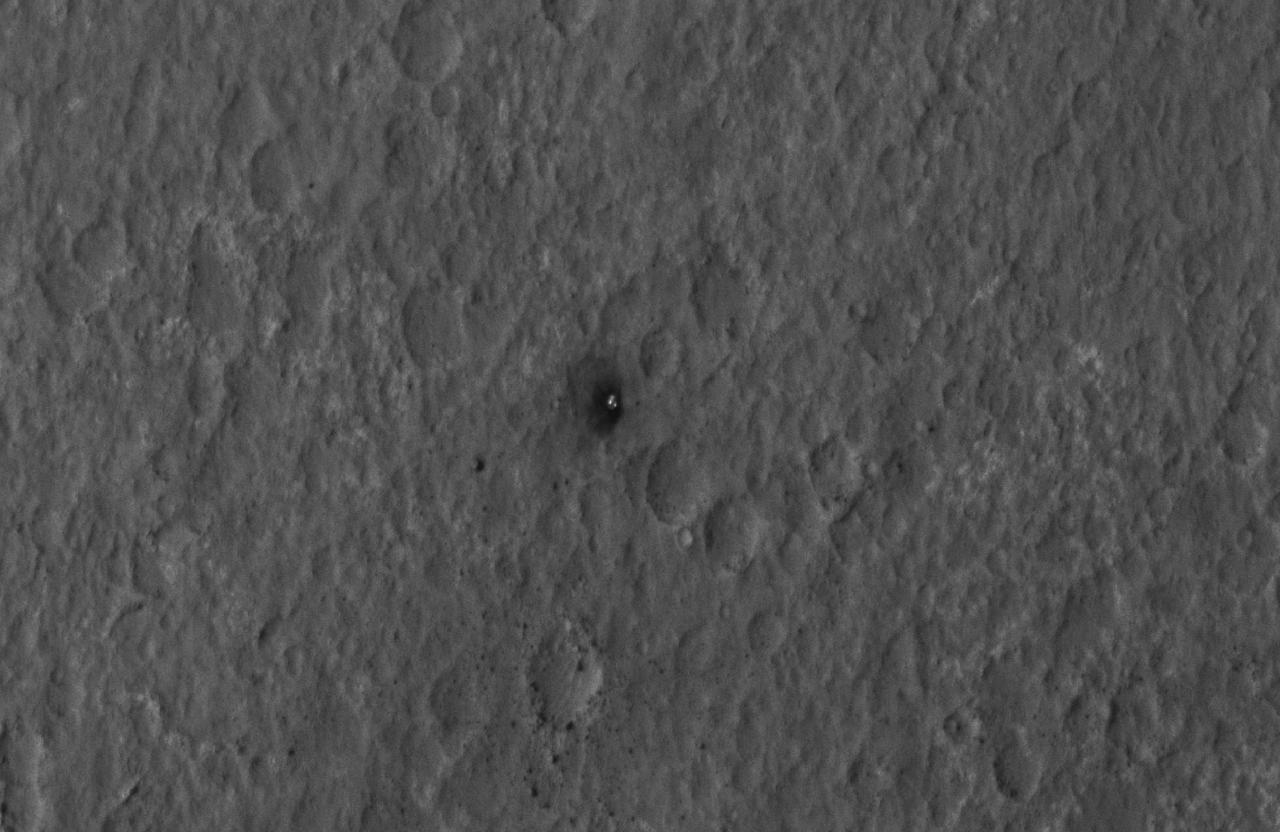
This close-up view shows NASA Curiosity rover on the surface of Mars. The image was captured by the NASA Mars Reconnaissance Orbiter about 24 hours after the rover made its grand appearance on Mars.
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to its location in December 2015.
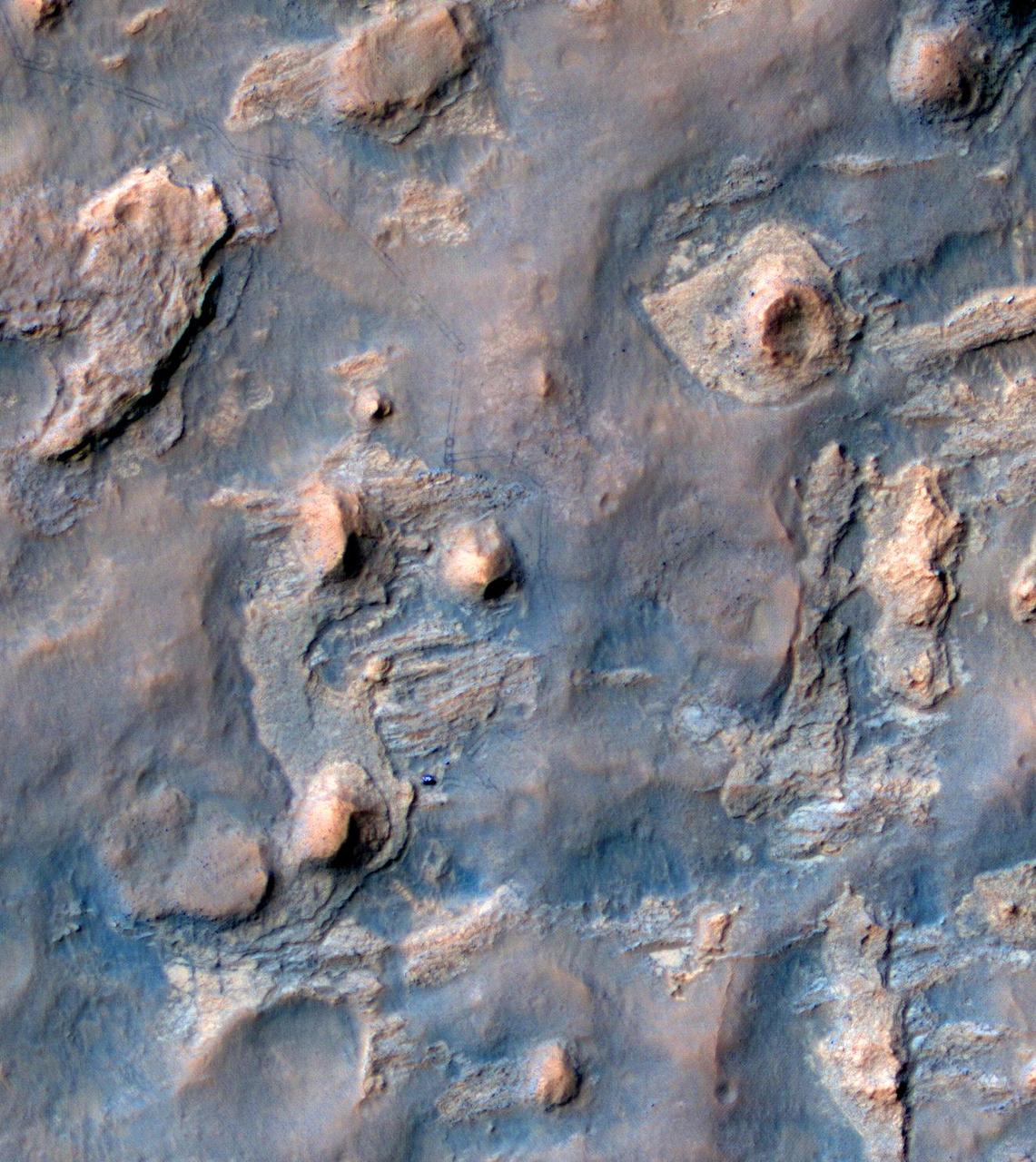
NASA rover Curiosity appears as a bluish dot near the lower right corner of this enhanced-color view from the HiRISE camera on NASA Mars Reconnaissance Orbiter.
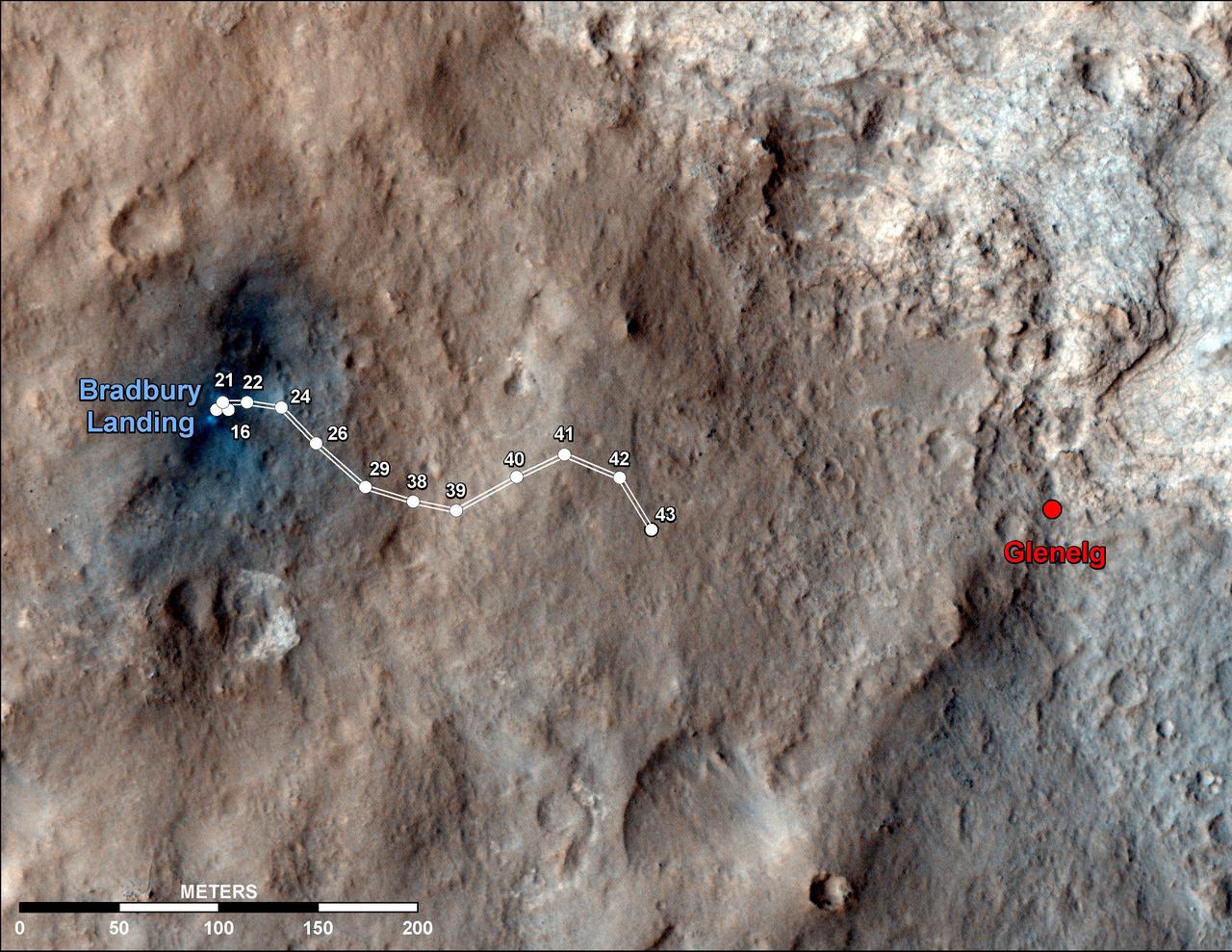
This map shows the route driven by NASA Mars rover Curiosity through the 43rd Martian day, or sol, of the rover mission on Mars Sept. 19, 2012. The route starts where the rover touched down, a site subsequently named Bradbury Landing.
This still image from an animation shows the effects of weights from the entry vehicle of NASA Curiosity rover hitting the surface of Mars.

This color-enhanced view of NASA Curiosity rover on the surface of Mars was taken by NASA Mars Reconnaissance Orbiter as the satellite flew overhead. The descent stage blast pattern around the rover is clearly seen as relatively blue colors.
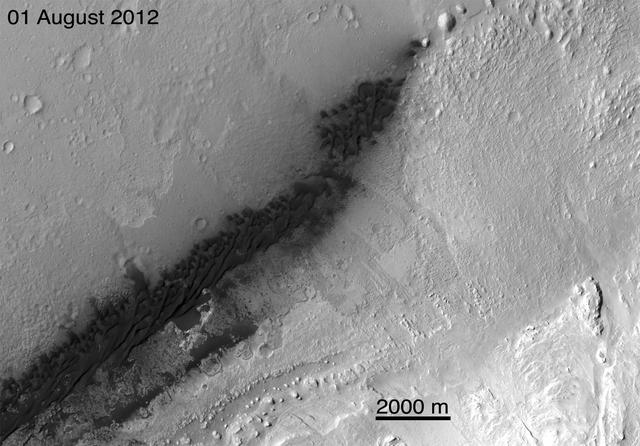
This image from NASA Mars Reconnaissance Orbiter shows wind-caused changes in the parachute of NASA Mars Science Laboratory spacecraft as the chute lay on the Martian ground during months after its use in safe landing of the Curiosity rover.
NASA Curiosity rover and its parachute were spotted by NASA Mars Reconnaissance Orbiter as Curiosity descended to the surface on Aug. 5 PDT Aug. 6 EDT. Curiosity and its parachute are in the small white box at center.
This stereo anaglyph shows NASA Mars rover Curiosity where it landed on Mars within Gale Crater, at a site now called Bradbury Landing. You need 3-D glasses to view this image.
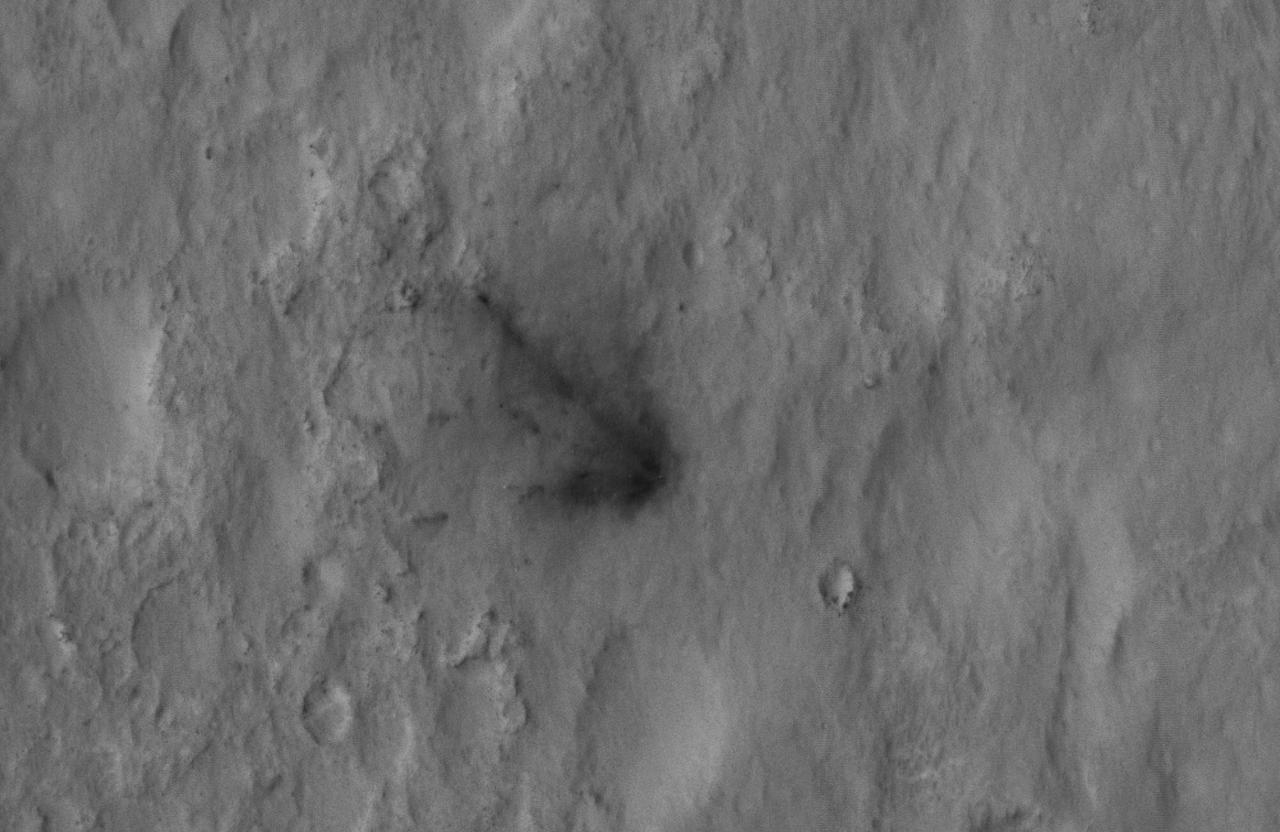
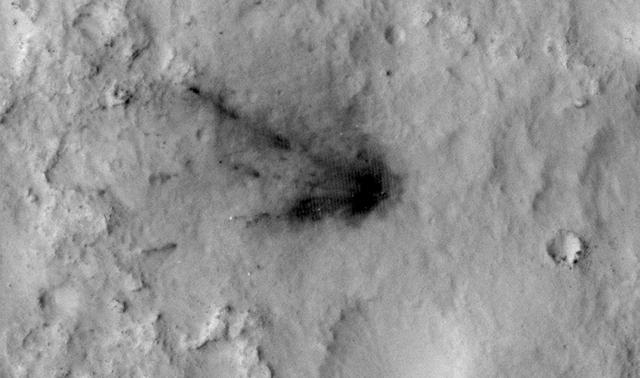
This close-up view captured by NASA Mars Reconnaissance Orbiter shows darkened radial jets caused by the impact of Curiosity sky crane, which helped deliver the rover to the surface of Mars.
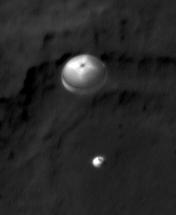
NASA Curiosity rover and its parachute were spotted by NASA Mars Reconnaissance Orbiter as Curiosity descended to the surface. The HiRISE camera captured this image of Curiosity while the orbiter was listening to transmissions from the rover.
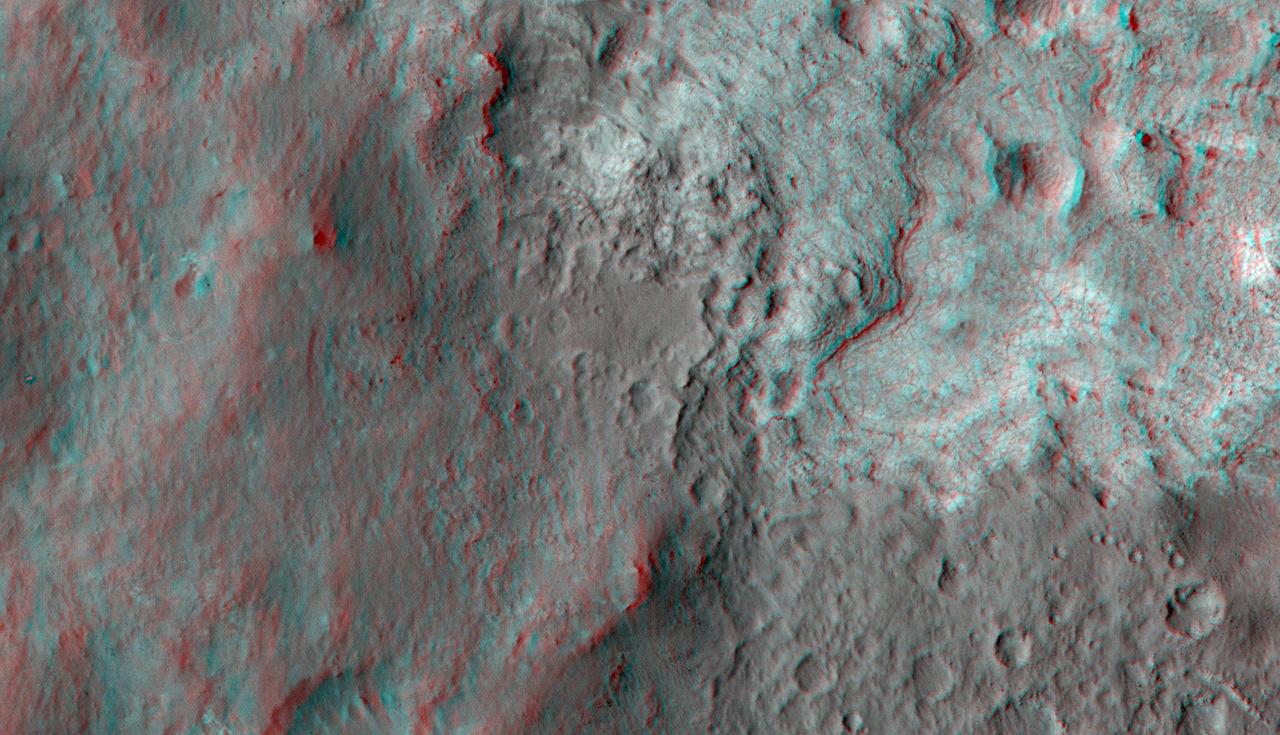
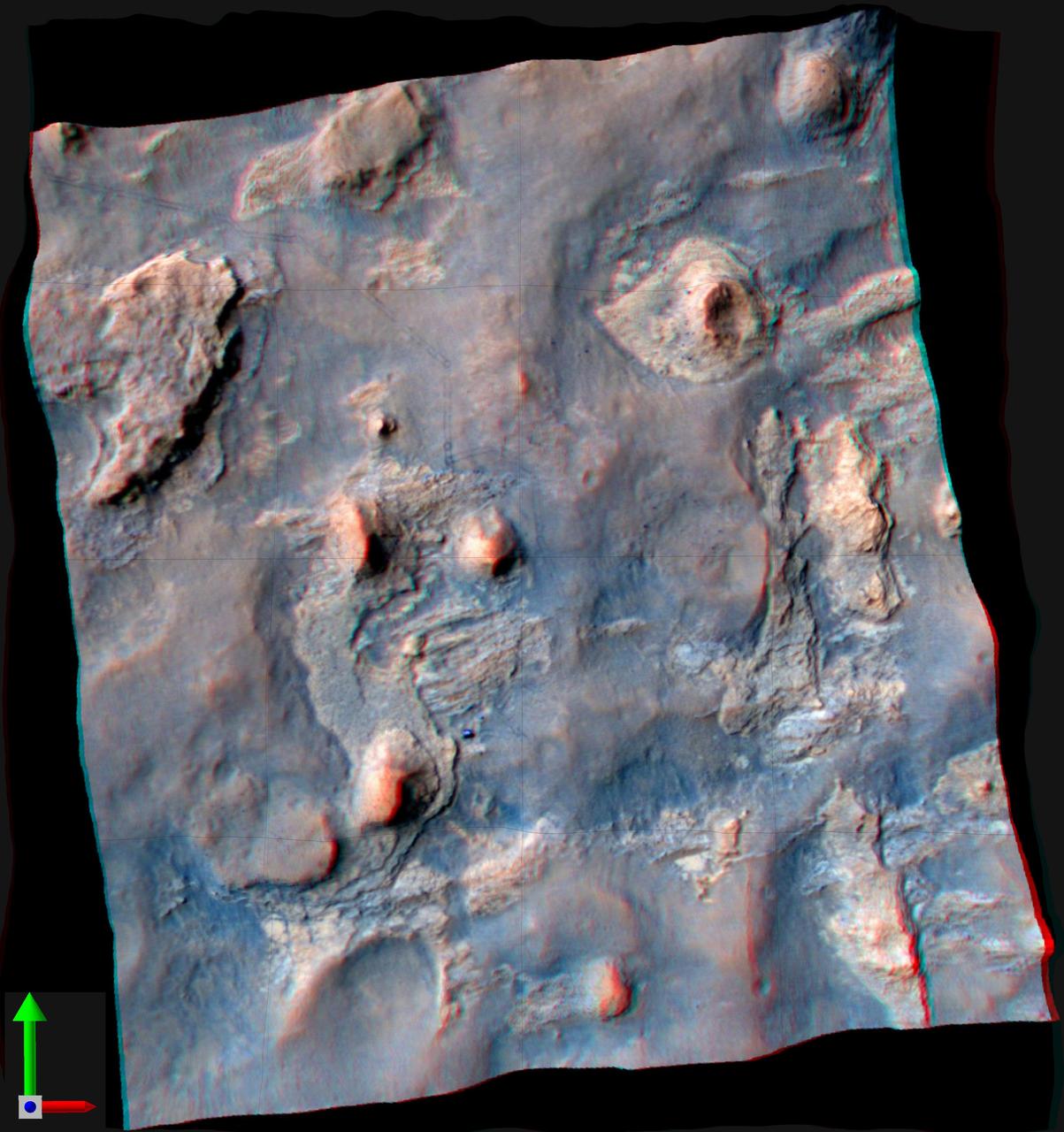
This 3-D image shows the upcoming science destination for NASA Mars rover Curiosity, a region dubbed Glenelg, where three different types of material seen from orbit come together.
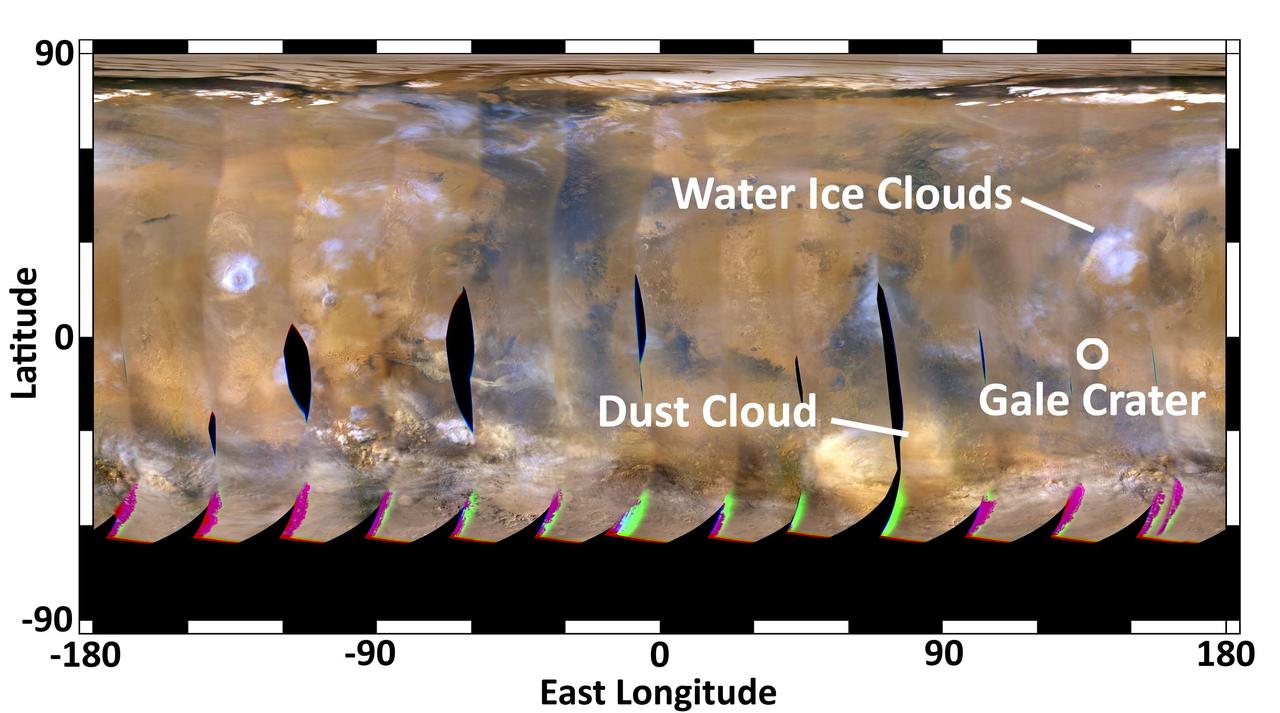
This global map of Mars was acquired on Aug. 2, 2012, by the Mars Color Imager instrument on NASA Mars Reconnaissance Orbiter. One global map is generated each day to forecast weather conditions for the entry, descent and landing of NASA Curiosity.

This frame from an animation shows NASA Mars Reconnaissance Orbiter flying over NASA Curiosity shown in pink as the rover lands on the Red Planet.
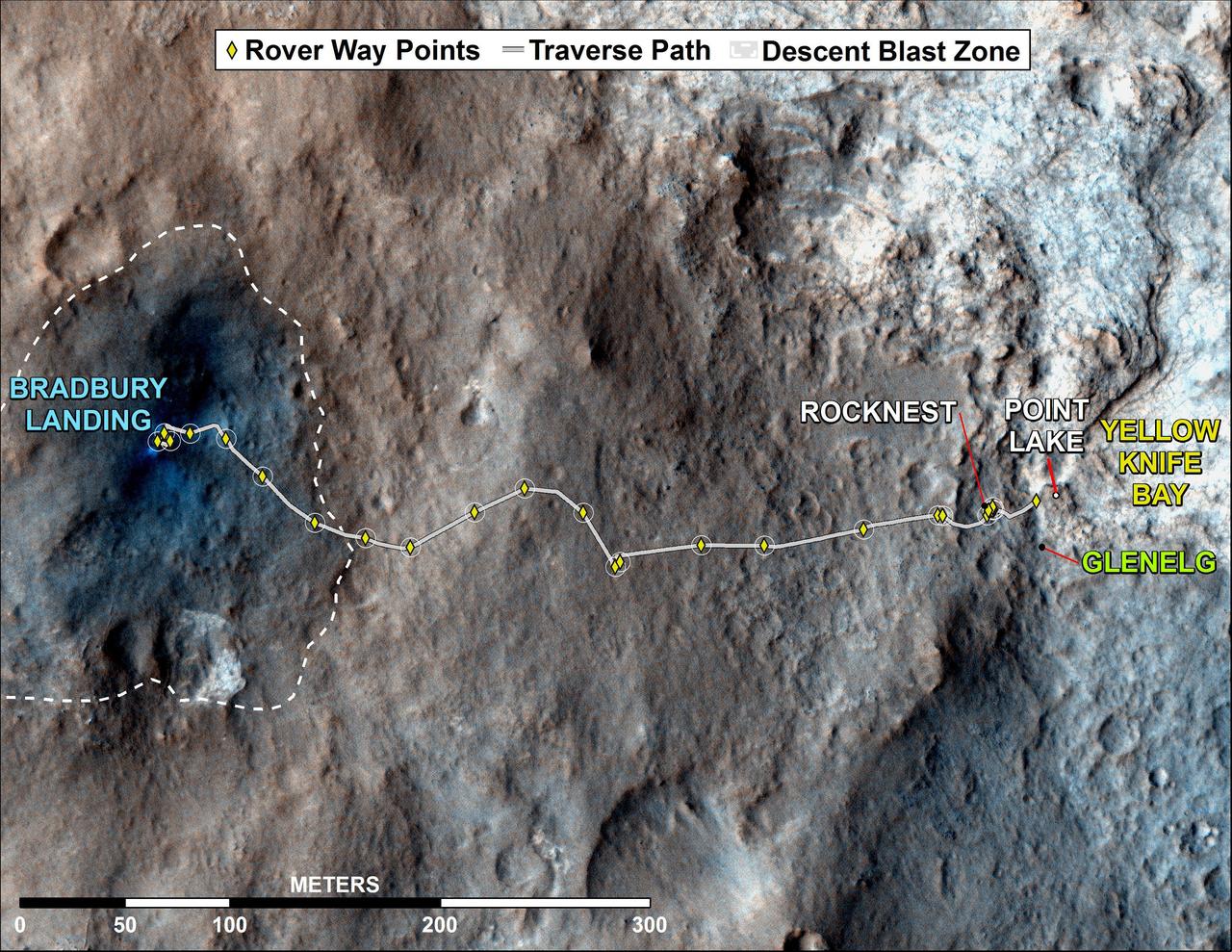
This map shows where NASA Mars rover Curiosity has driven since landing at a site subsequently named Bradbury Landing, and traveling to an overlook position near beside Point Lake, in drives totaling 1,703 feet 519 meters.
The total distance driven by NASA Mars rover Curiosity passed the one-mile mark a few days before the first anniversary of the rover landing on Mars. The mapped area is within Gale Crater, and north of Mount Sharp, in the middle of the crater.
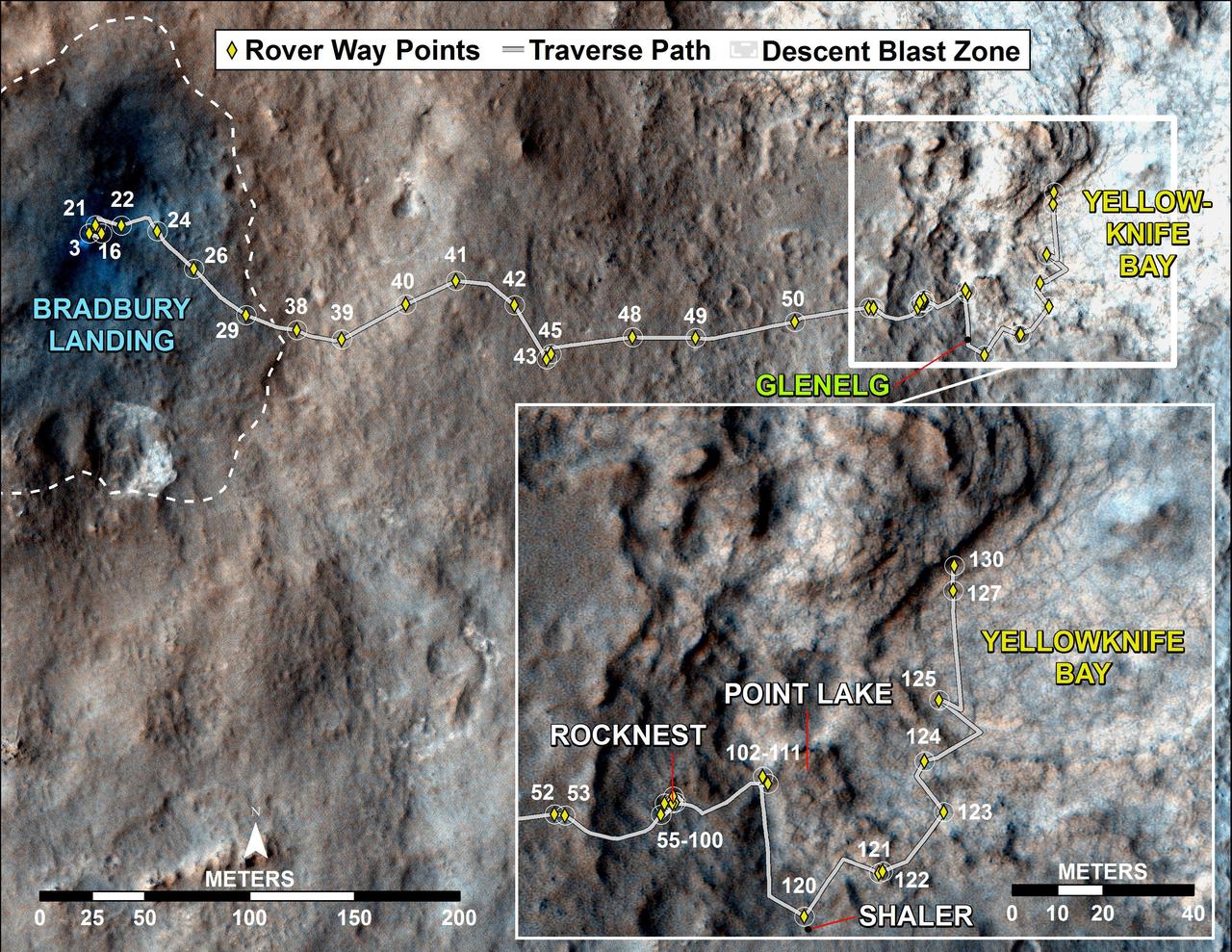
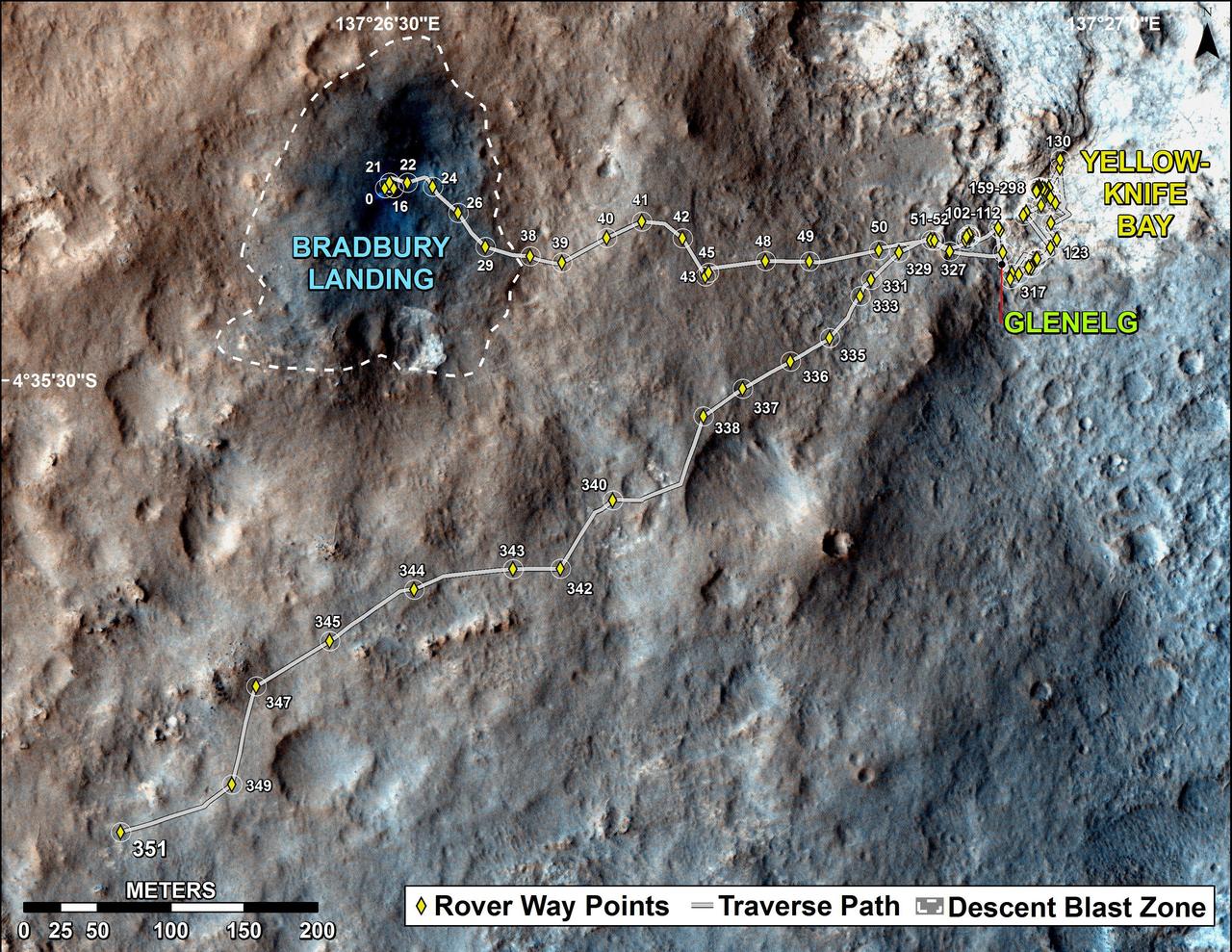
This map traces where NASA Mars rover Curiosity drove between landing at a site subsequently named Bradbury Landing, where the rover entered a shallow depression called Yellowknife Bay on Sol 125 Dec.12.

NASA Mars Reconnaissance Orbiter obtained this color image with the Mars Descent Imager aboard NASA Curiosity rover during its descent to the surface. Curiosity landed on Aug. 5 PDT Aug. 6 EDT.
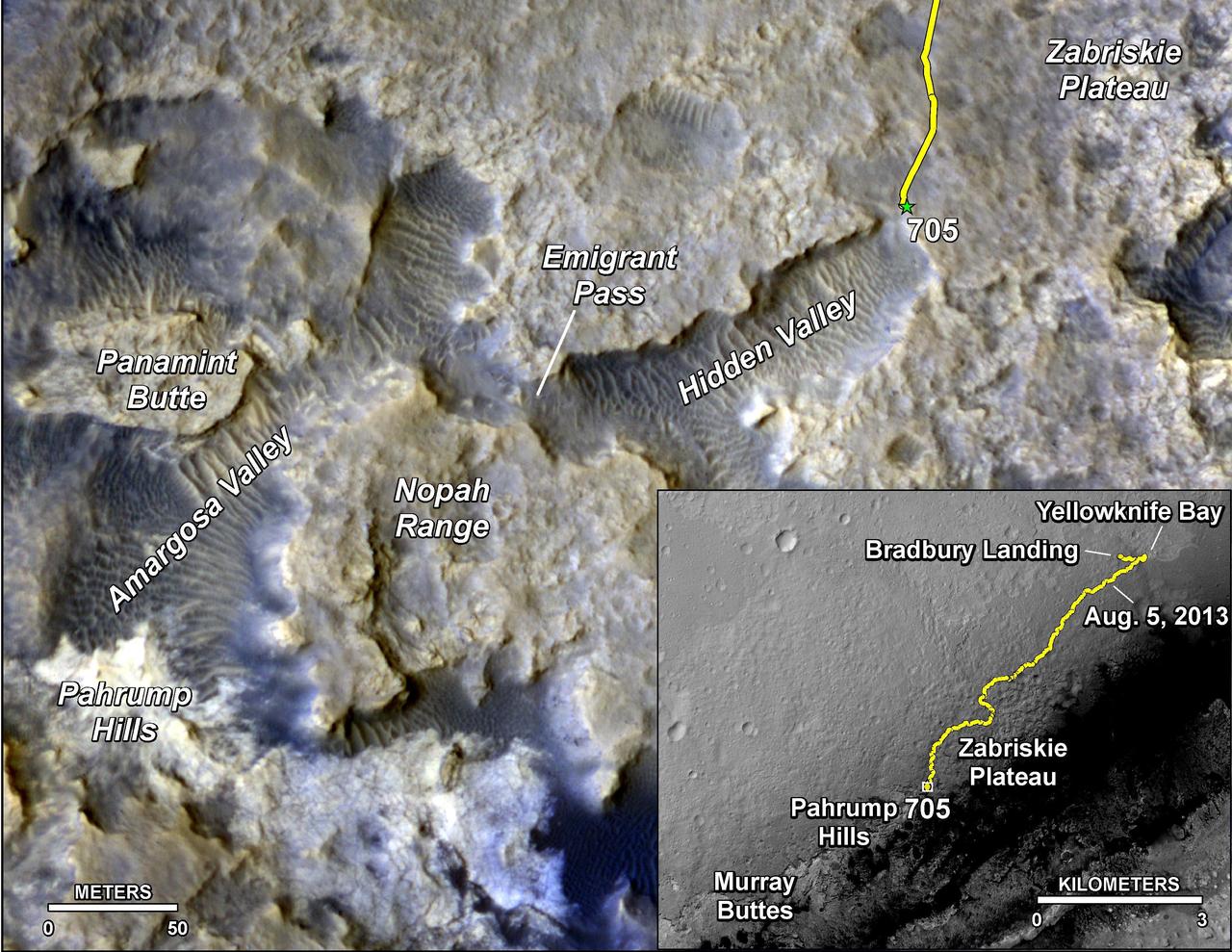
The main map shows landforms near NASA Curiosity Mars rover as the rover second anniversary of landing on Mars nears. The gold traverse line ends at Curiosity position as of July 31, 2014 Sol 705.
This global map of Mars was acquired on Aug. 4, 2012, by the Mars Color Imager instrument on NASA Mars Reconnaissance Orbiter to forecast weather conditions for the entry, descent and landing of NASA Curiosity rover.
Ballasts Hitting the Surface, Close-Up with arrows
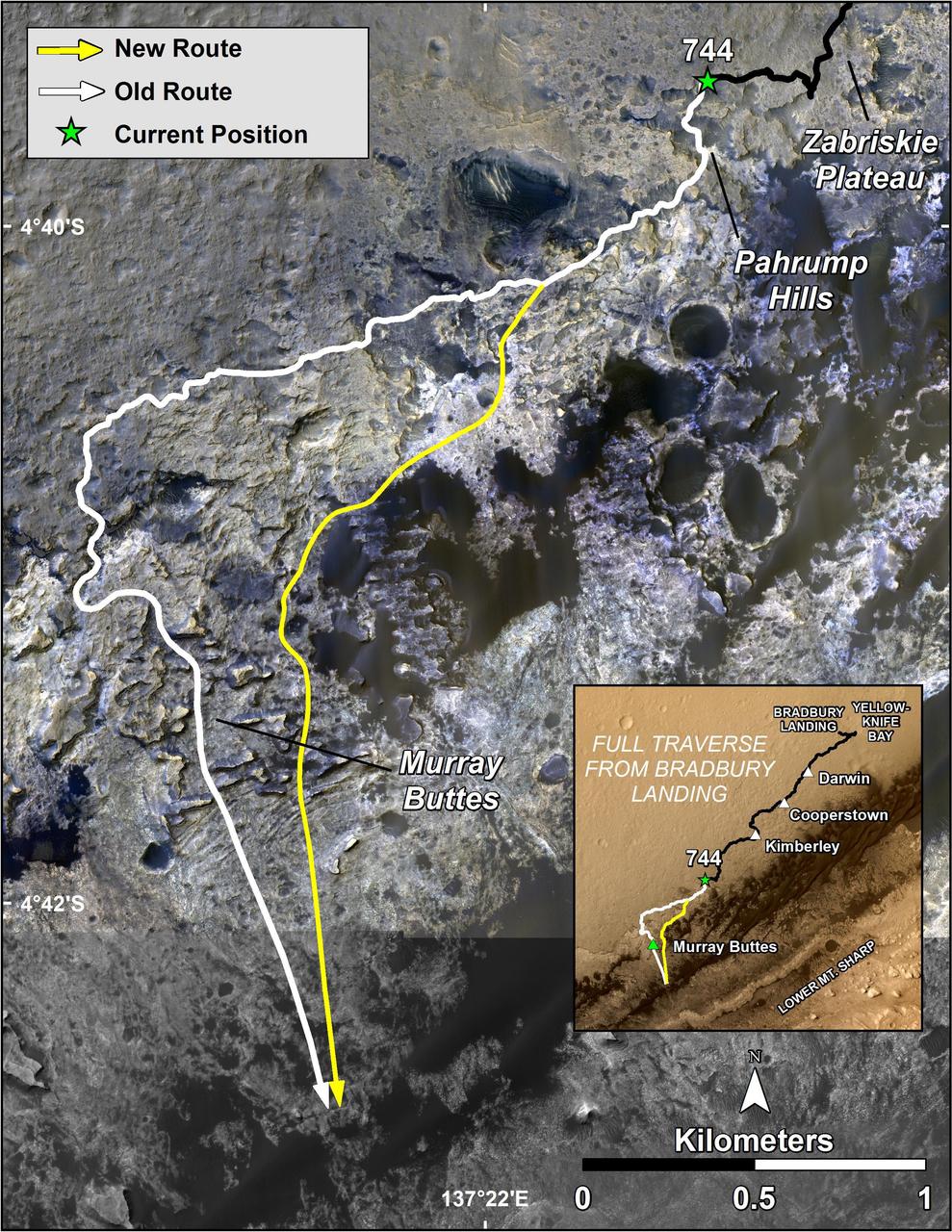
The route of NASA Mars Curiosity rover up the slopes of Mount Sharp on Mars is indicated in yellow in this image. The rover current position is marked with a star. This new route provides excellent access to many features in the Murray Formation.
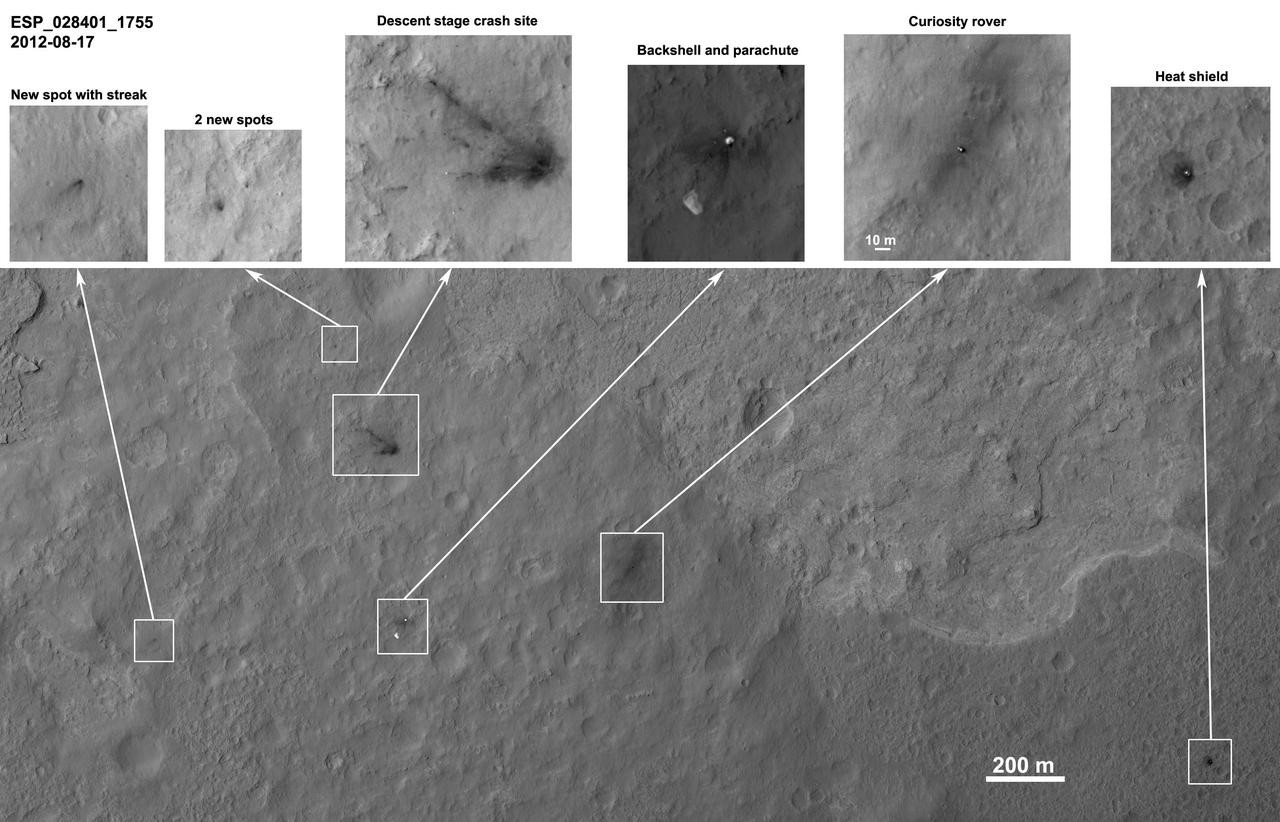
Details such as the shadow of the mast on NASA Mars rover Curiosity appear in an image taken Aug. 17, 2012, by the HiRISE camera on NASA Mars Reconnaissance Orbiter, from more directly overhead than previous HiRISE images of Curiosity.
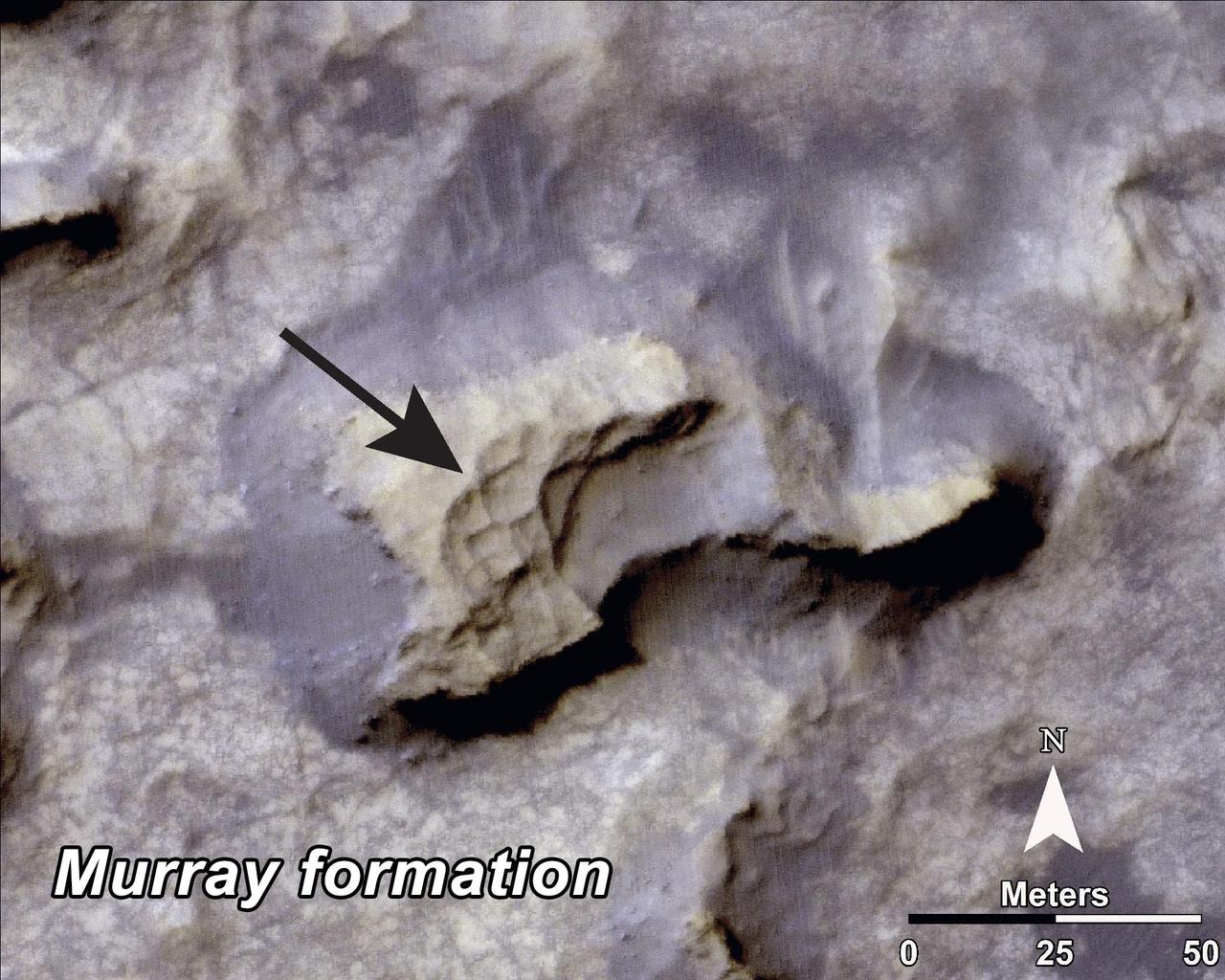
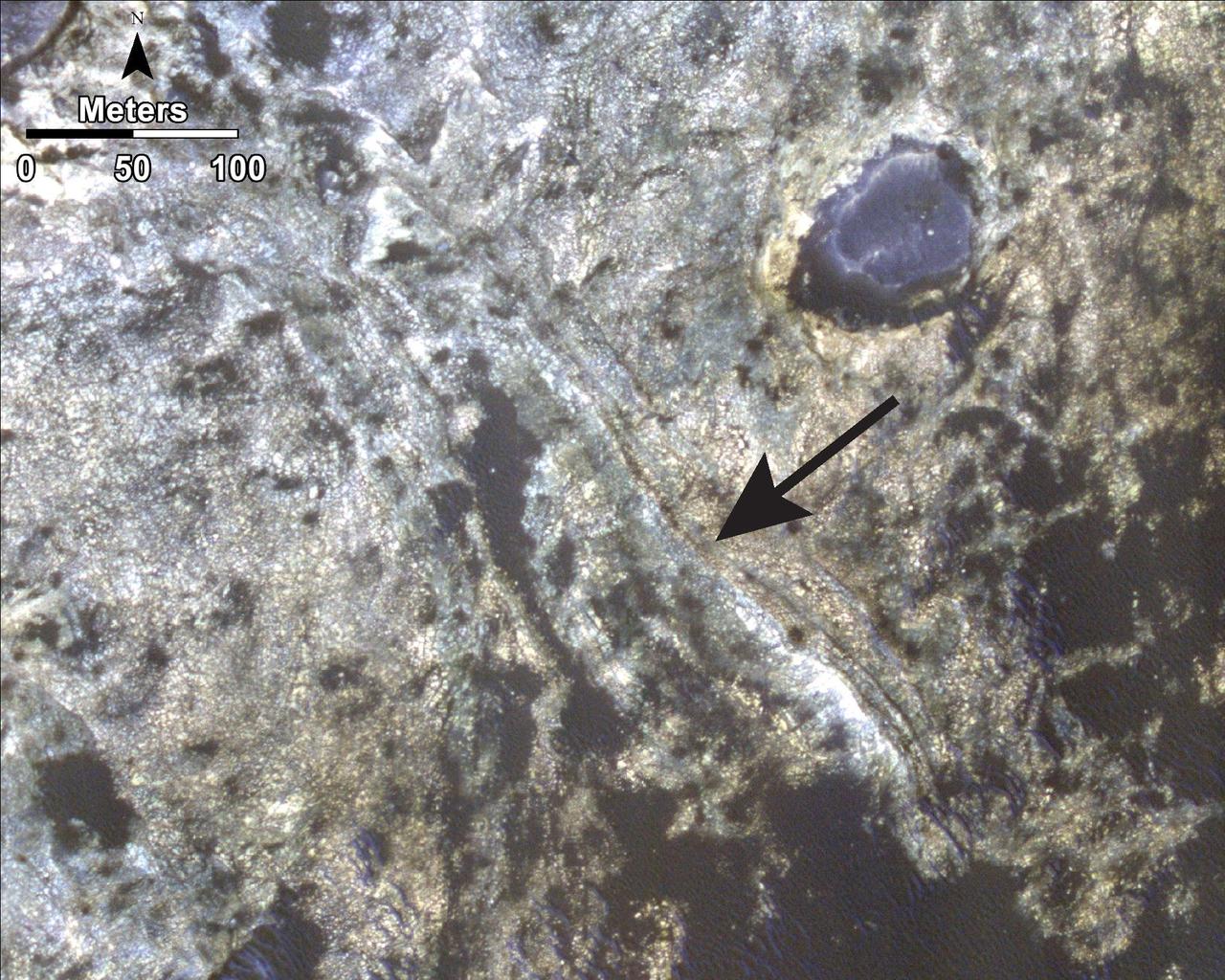
This image, taken by NASA Mars Reconnaissance Orbiter, shows a mesa within the Murray Buttes area on Mars showing a complex fracture pattern black arrow protruding from the eroding rock.
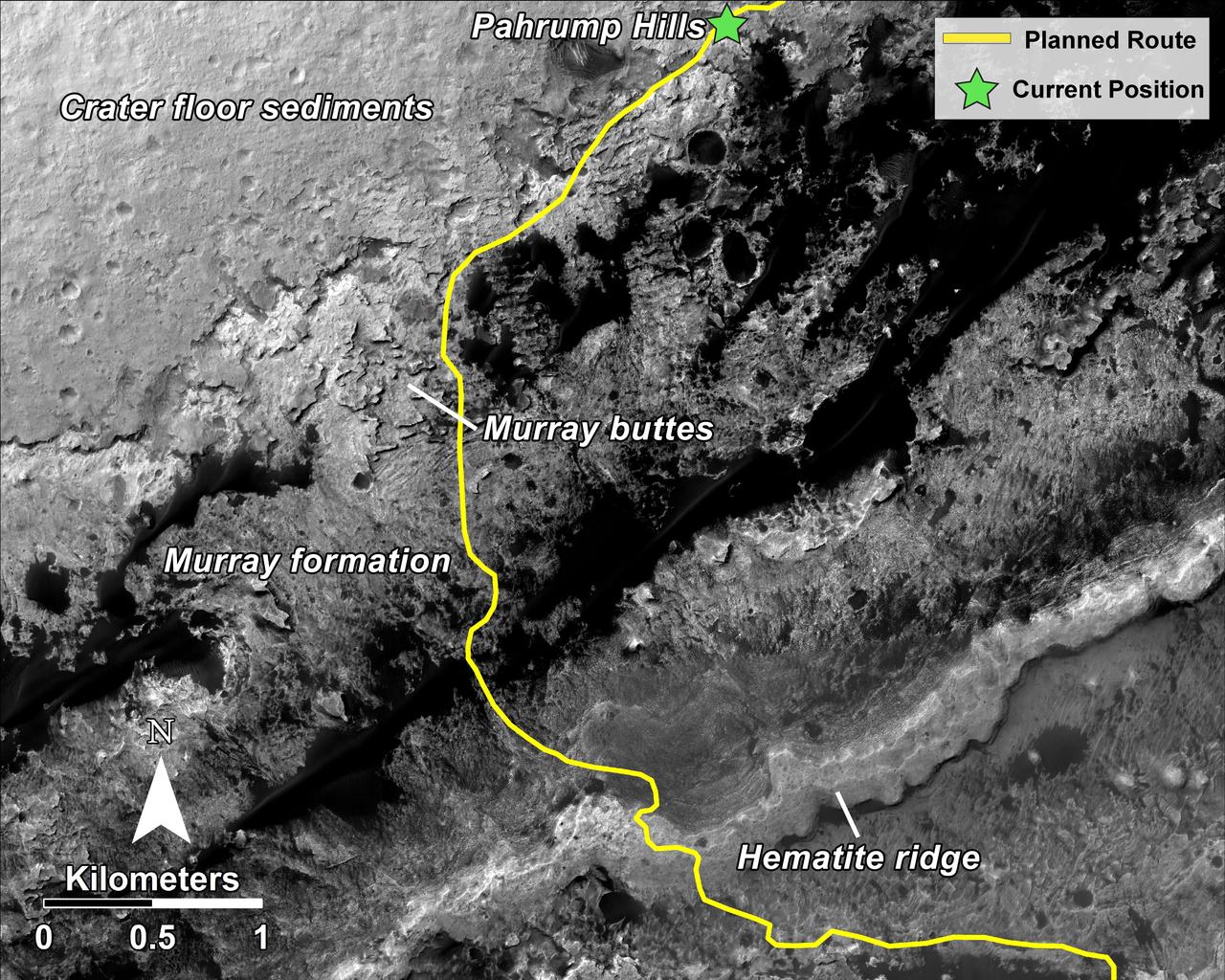
This mosaic, taken by NASA Mars Reconnaissance Orbiter, shows the planned route in yellow of NASA Curiosity rover from Pahrump Hills at the base of Mount Sharp, through the Murray Formation.
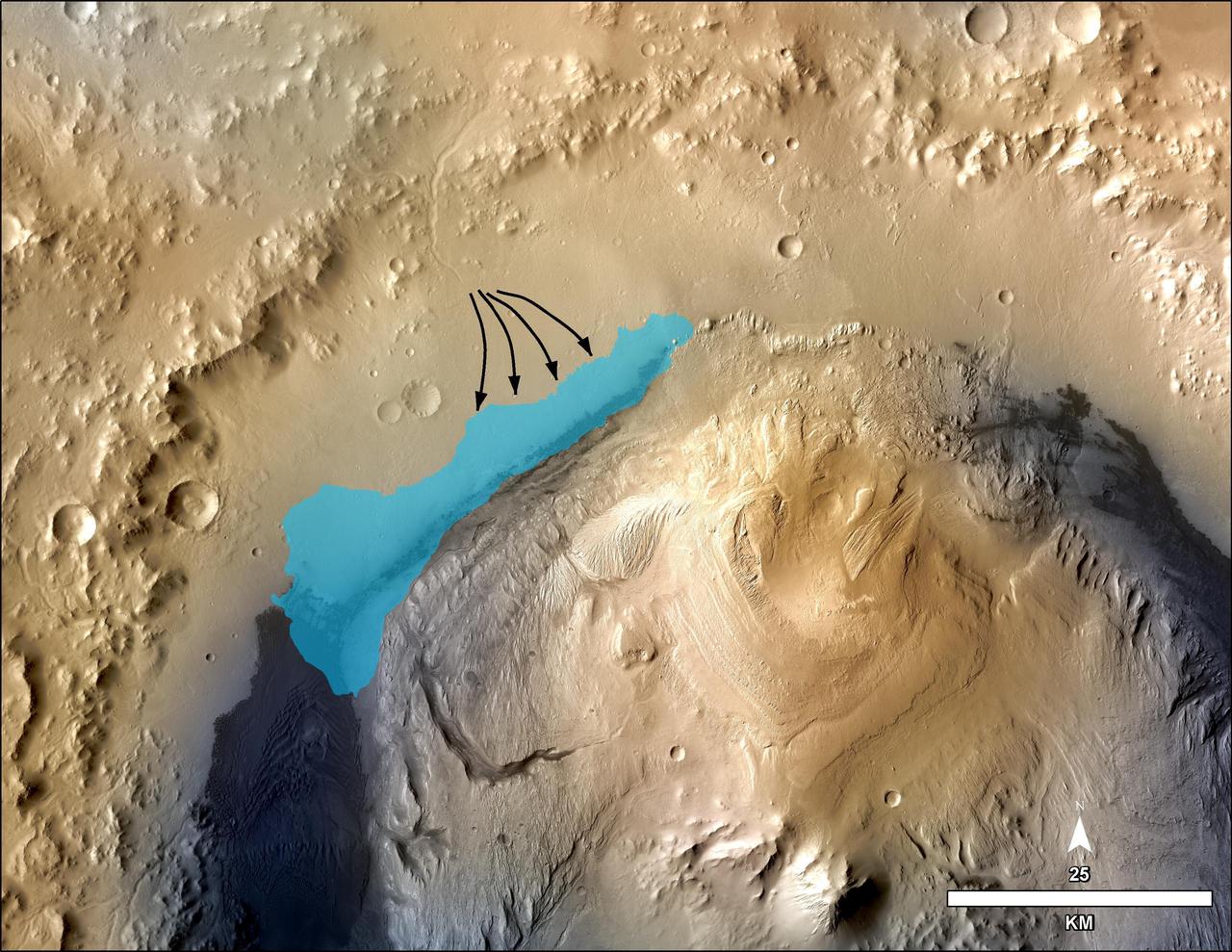
This illustration depicts a concept for the possible extent of an ancient lake inside Gale Crater. The base map combines image data from the Context Camera on NASA Mars Reconnaissance Orbiter and color information from Viking Orbiter imagery.
This frame from a sequence of images shows a blast zone where the sky crane from NASA Curiosity rover mission hit the ground after setting the rover down in August 2012. The images are from HiRISE on NASA Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA19159
NASA Curiosity Mars rover and tracks from its driving are visible in this view from orbit, acquired on April 11, 2014, by the High Resolution Imaging Science Experiment HiRISE camera on NASA Mars Reconnaissance Orbiter.
This map shows the route driven by NASA Curiosity Mars rover from the Bradbury Landing location where it landed in August 2012 to the Pahrump Hills outcrop where it drilled into the lowest part of Mount Sharp.

This stereo anaglyph shows the parachute and back shell that helped guide NASA Curiosity to the surface of Mars. You need 3-D glasses to view this image.
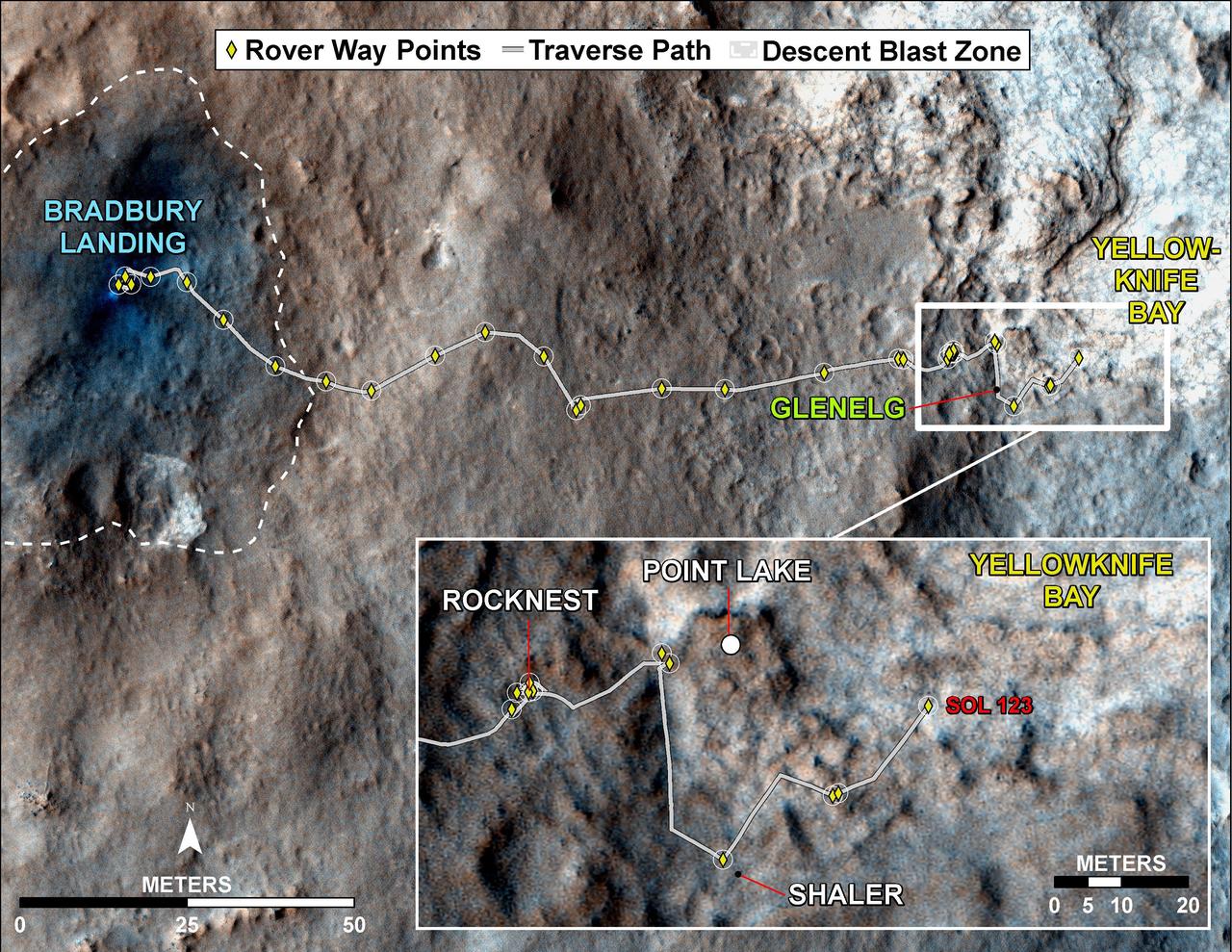
This map traces where NASA Mars rover Curiosity drove between landing at a site subsequently named Bradbury Landing, and the position reached during the mission 123rd Martian day, or sol, Aug. 10, 2012.
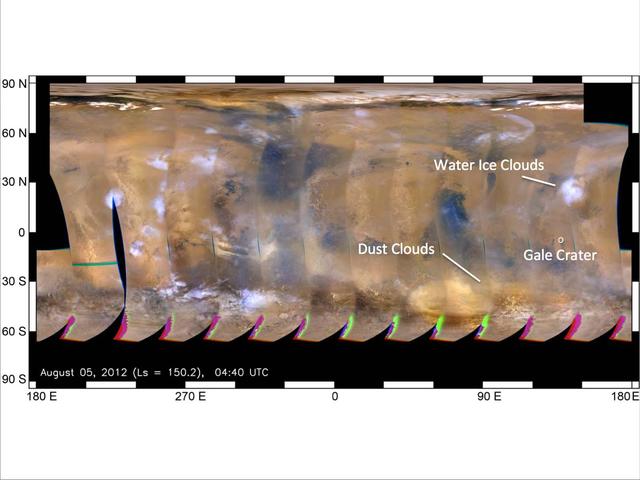
This global map of Mars was acquired on Aug. 5, 2012, by the Mars Color Imager instrument on NASA MRO. One global map is generated each day to forecast weather conditions for the entry, descent and landing of NASA Curiosity rover.
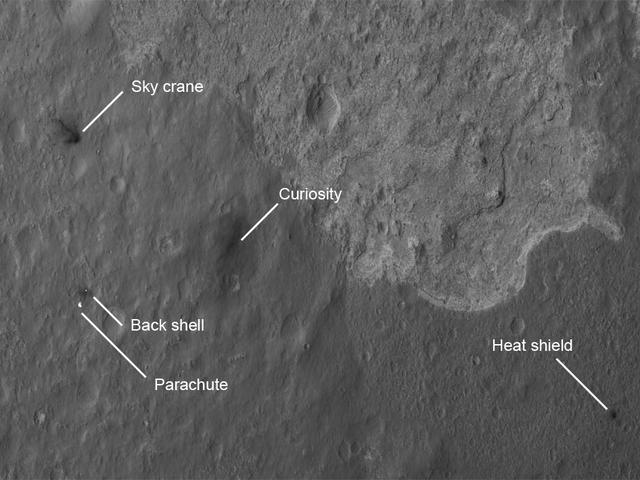
The four main pieces of hardware that arrived on Mars with NASA Curiosity rover were spotted by NASA Mars Reconnaissance Orbiter MRO which captured this image about 24 hours after landing.
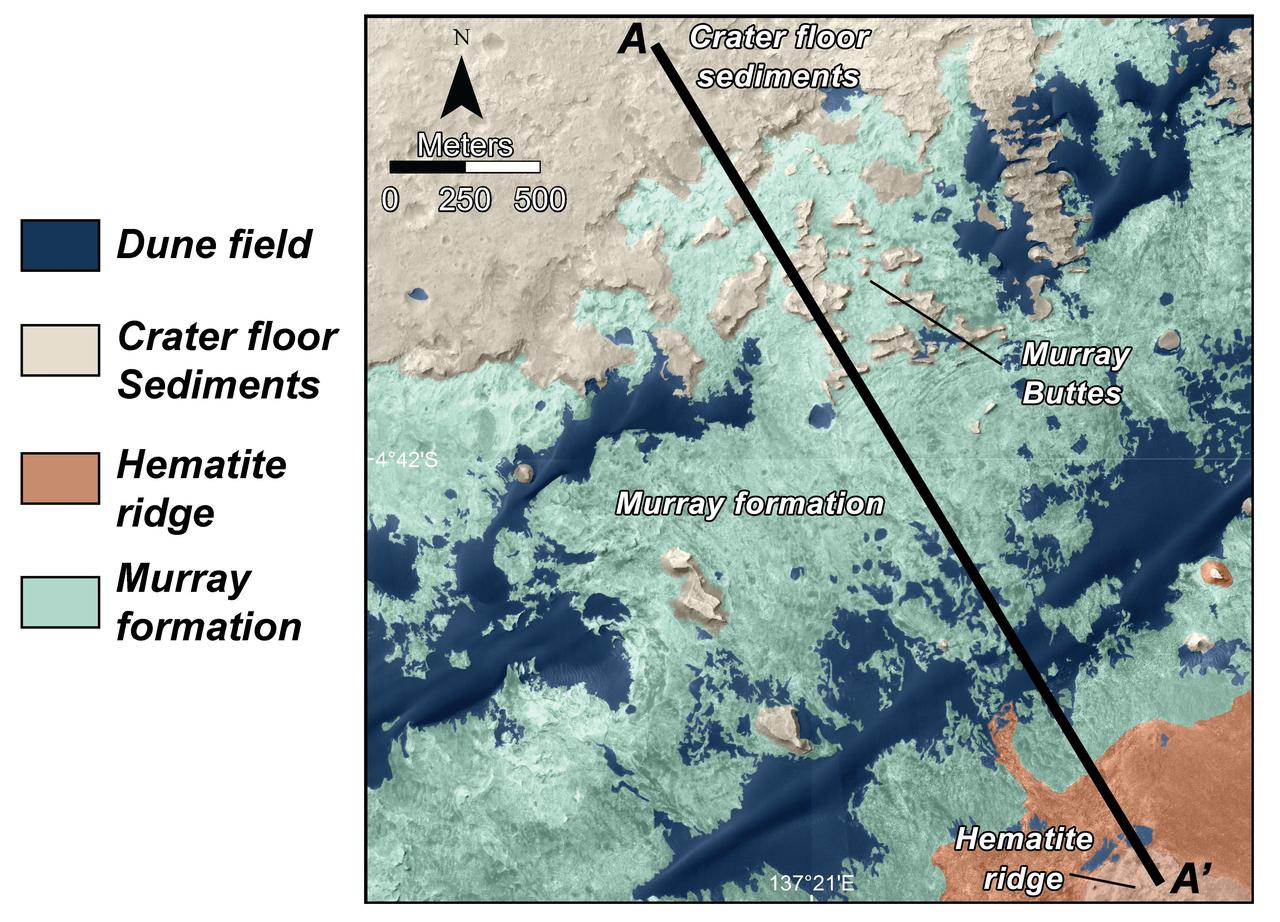
This is a map of lower Mount Sharp on Mars, showing the major geologic units identified from orbit. The rocks of the Murray Formation, mapped in green, likely represent the oldest layers of Mount Sharp that NASA Curiosity rover will explore.
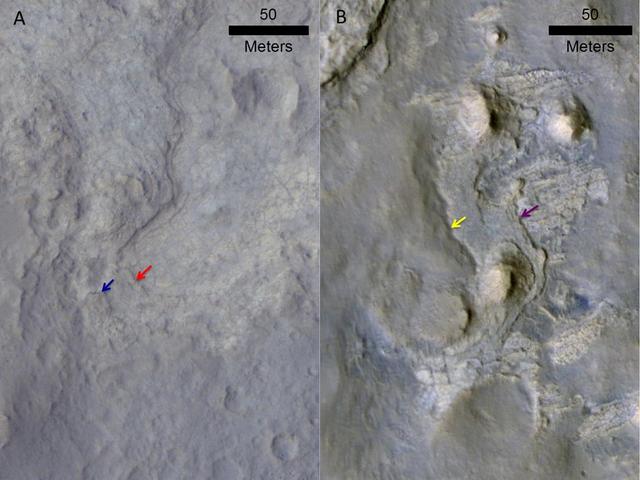
These two images come from the HiRISE camera on NASA Mars Reconnaissance Orbiter. Images of locations in Gale Crater taken from orbit around Mars reveal evidence of erosion in recent geological times and development of small scarps, or vertical surfaces

This map shows the route on lower Mount Sharp that NASA Curiosity followed between April 19, 2015, and Nov. 5, 2015.
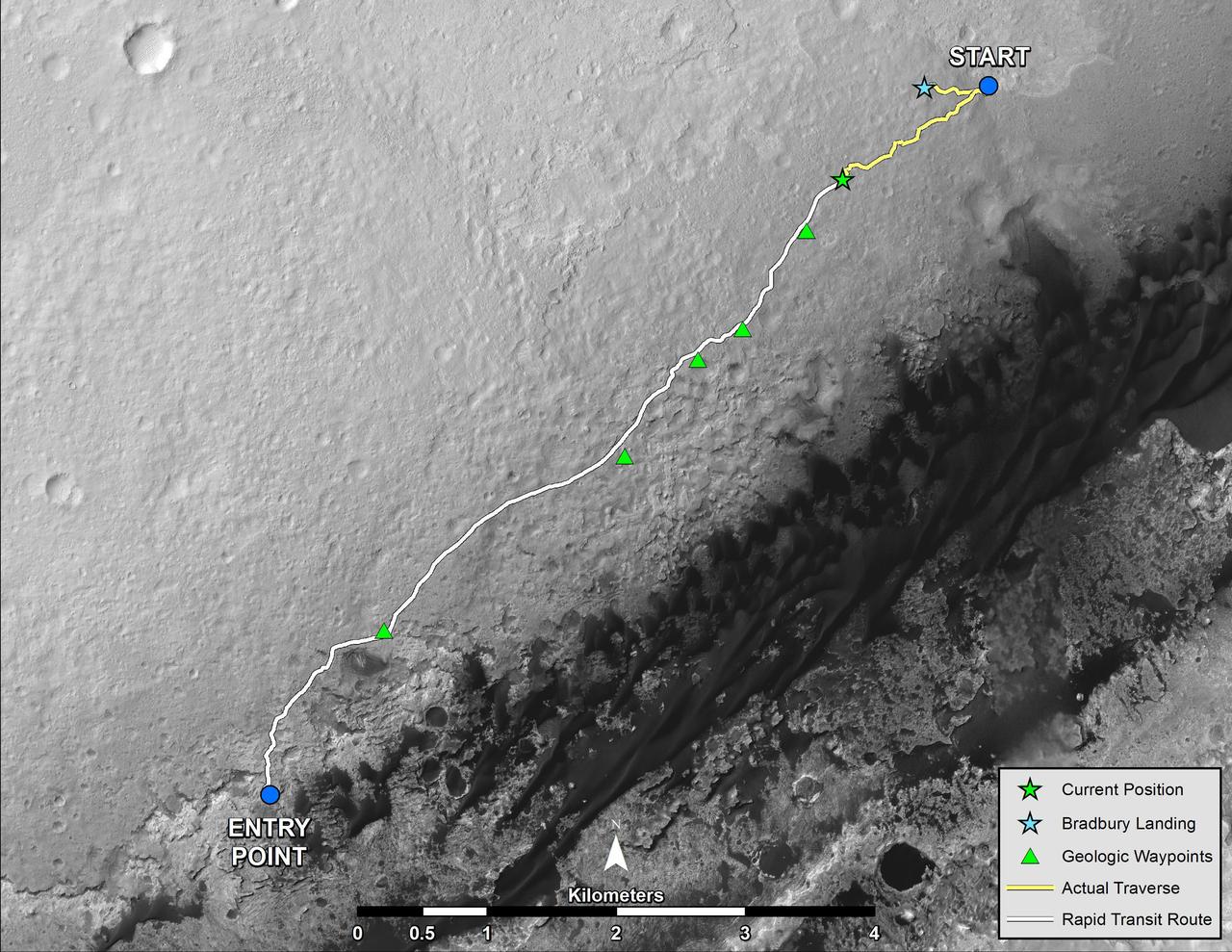
NASA Mars rover Curiosity left the Glenelg area on July 4, 2013, on a rapid transit route to the entry point for the mission next major destination, the lower layers of Mount Sharp.
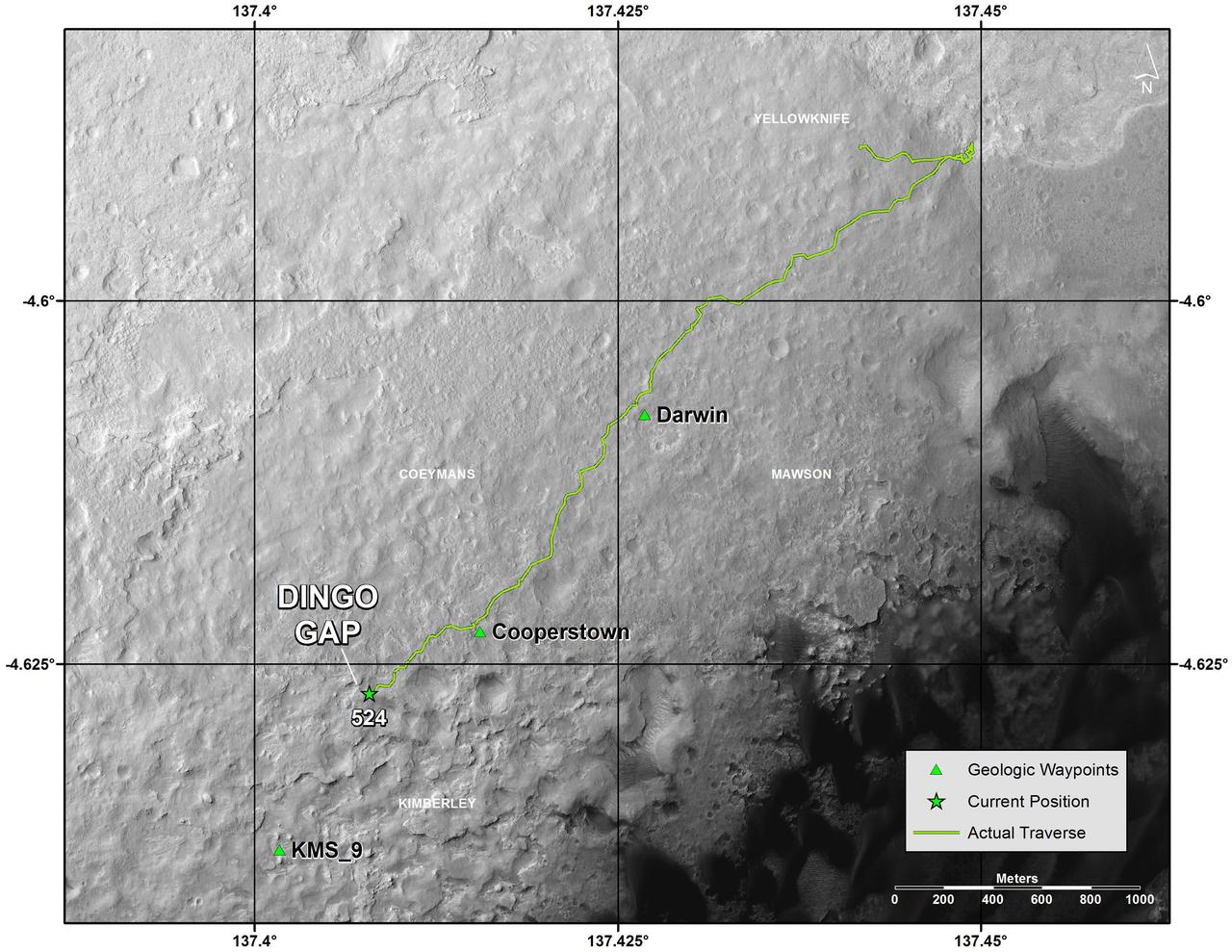
This map shows the route that NASA Curiosity Mars rover drove inside Gale Crater from its landing in August 2013 through Jan. 26, 2004. The rover is approaching a gap between two low scarps, Dingo Gap.
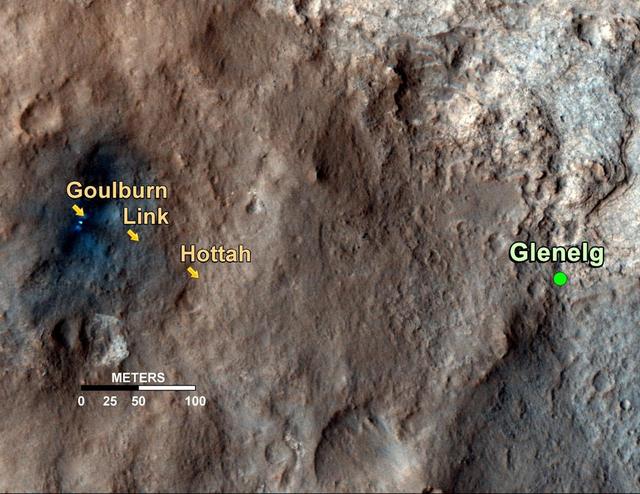
This map shows the path on Mars of NASA Curiosity rover toward Glenelg, an area where three terrains of scientific interest converge. Arrows mark what appears to be an ancient Martian streambed.
The feature that appears bright blue at the center of this scene is NASA's Curiosity Mars rover on the northwestern flank of Mount Sharp, viewed by NASA's Mars Reconnaissance Orbiter. Curiosity is approximately 10 feet long and 9 feet wide (3.0 meters by 2.8 meters). The view is a cutout from observation ESP_050897_1750 taken by the High Resolution Imaging Science Experiment (HiRISE) camera on the orbiter on June 5, 2017. HiRISE has been imaging Curiosity about every three months, to monitor the surrounding features for changes such as dune migration or erosion. When the image was taken, Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and "Vera Rubin Ridge," a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit. The rover's surroundings include tan rocks and patches of dark sand. As in previous HiRISE color images of Curiosity since the rover was at its landing site, the rover appears bluer than it really is. HiRISE color observations are recorded in a red band, a blue-green band and an infrared band, and displayed in red, green and blue. This helps make differences in Mars surface materials apparent, but does not show natural color as seen by the human eye. Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life. https://photojournal.jpl.nasa.gov/catalog/PIA21710

This map shows the two locations of a research campaign by NASA's Curiosity Mars rover mission to investigate active sand dunes inside Gale Crater on Mars. The Bagnold Dunes form a dark band on the northwestern flank of Mount Sharp, inside the crater. In late 2015 and early 2016, Curiosity examined crescent-shaped dunes, called barchans, which are convex on the downwind (leeward) side. This was the first close-up study of active sand dunes anywhere other than Earth. In February 2017, the rover reached a location where the dunes are linear in shape, and the mission began Phase 2 of its dunes campaign. http://photojournal.jpl.nasa.gov/catalog/PIA21269

This map shows the route driven by NASA's Curiosity Mars rover (blue line) and locations where the rover's Chemistry and Camera (ChemCam) instrument detected the element boron (dots, colored by abundance of boron according to the key at right). The main map shows the traverse from landing day (Sol 0) in August 2012 to the rover's location in September 2016, with boron detections through September 2015. The inset at upper left shows a magnified version of the most recent portion of that traverse, with boron detections during that portion. Overlapping dots represent cases when boron was detected in multiple ChemCam observation points in the same target and non-overlapping dots represent cases where two different targets in the same location have boron. Most of the mission's detections of boron have been made in the most recent seven months (about 200 sols) of the rover's uphill traverse. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. The scale bar at lower right represents one kilometer (0.62 mile). http://photojournal.jpl.nasa.gov/catalog/PIA21150
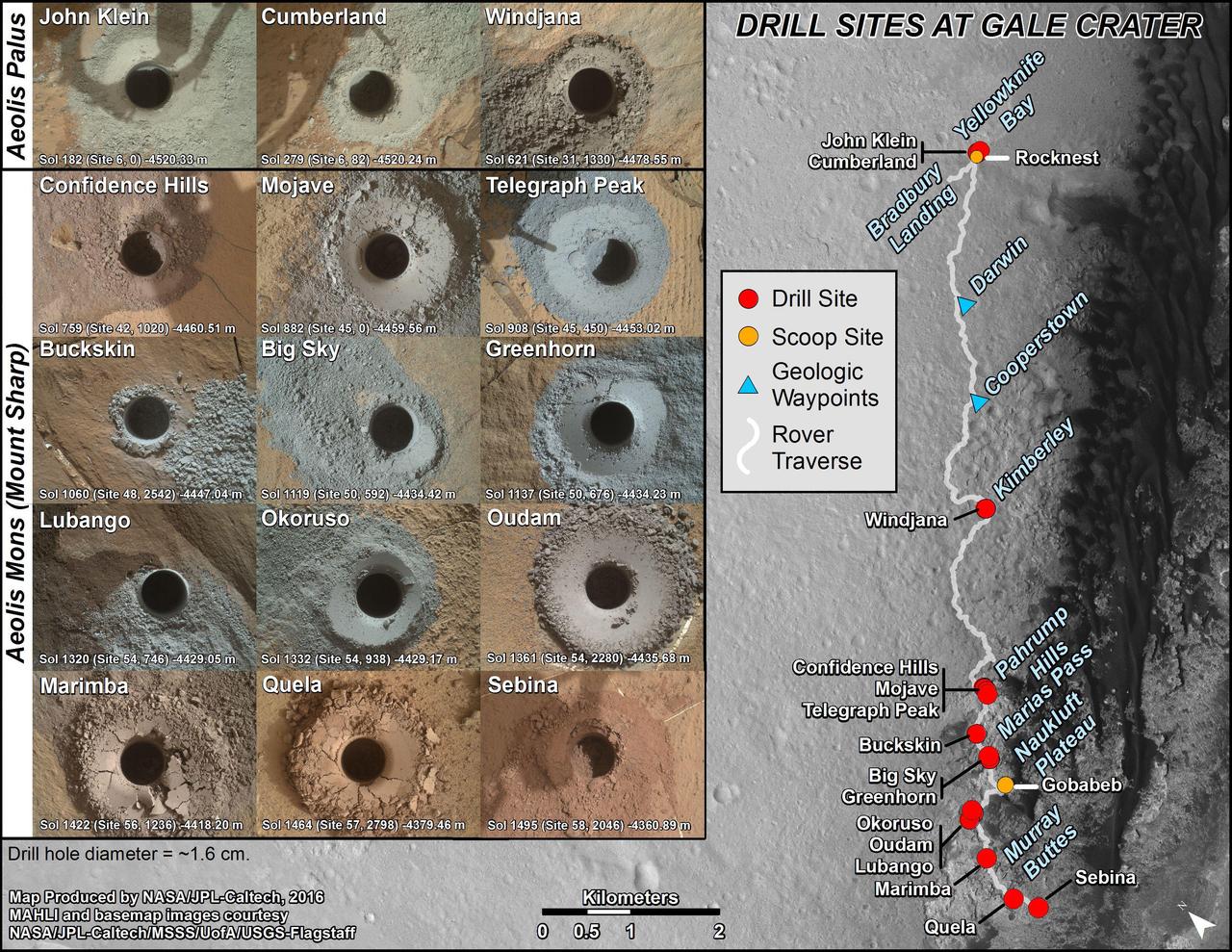
nal Caption Released with Image: This graphic maps locations of the sites where NASA's Curiosity Mars rover collected its first 19 rock or soil samples for analysis by laboratory instruments inside the vehicle. It also presents images of the drilled holes where 15 rock-powder samples were acquired. Curiosity scooped two soil samples at each of the other two sites: Rocknest and Gobabeb. The diameter of each drill hole is about 0.6 inch (1.6 centimeters), slightly smaller than a U.S. dime. The images used here are raw color, as recorded by the rover's Mars Hand Lens Imager (MAHLI) camera. Notice the differences in color of the material at different drilling sites. For the map, north is toward the upper left corner. The scale bar represents 2 kilometers (1.2 miles). The base map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. The latest sample site included is "Sebina,"where Curiosity drilled into bedrock of the Murray formation on Oct. 20, 2016, during the 1,495th Martian day, or sol, of the mission. Curiosity landed in August 2012 on the plain (named Aeolis Palus) near Mount Sharp (or Aeolis Mons). The drilling dates for the first 13 rock samples collected are, by location: "John Klein" on Feb. 8, 2013 (Sol 182); "Cumberland" on May 19, 2013 (Sol 279); "Windjana" on May 5, 2014 (Sol 621); "Confidence Hills" on Sept. 24, 2014 (Sol 759); "Mojave" on Jan. 29, 2015 (Sol 882); "Telegraph Peak" on Feb. 24, 2015 (Sol 908); "Buckskin" on July 30, 2015 (Sol 1060); "Big Sky" on Sept. 29, 2015 (Sol 1119); "Greenhorn" on Oct. 18, 2015 (Sol 1137); "Lubango" on April 23, 2016 (Sol 1320); "Okoruso" on May 5, 2016 (Sol 1332); "Oudam" on June 4, 2016 (Sol 1361); "Quela" on Sept. 18, 2016 (Sol 1464). http://photojournal.jpl.nasa.gov/catalog/PIA21254
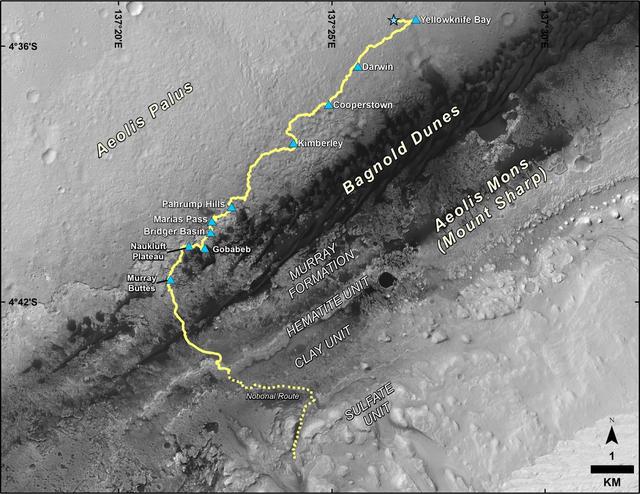
This map shows the route driven by NASA's Curiosity Mars rover from the location where it landed in August 2012 to its location in December 2016, which is in the upper half of a geological unit called the Murray formation, on lower Mount Sharp. Blue triangles mark waypoints investigated by Curiosity during the rover's two-year prime mission and first two-year extended mission. The "Hematite Unit" and "Clay Unit" are key destinations for the second two-year extension, through September 2018. An approximate possible route is indicated for studying those layers of the mountain. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. Bagnold Dunes form a band of dark, wind-blown material at the foot of Mount Sharp. The scale bar at lower right represents one kilometer (0.62 mile). http://photojournal.jpl.nasa.gov/catalog/PIA21144