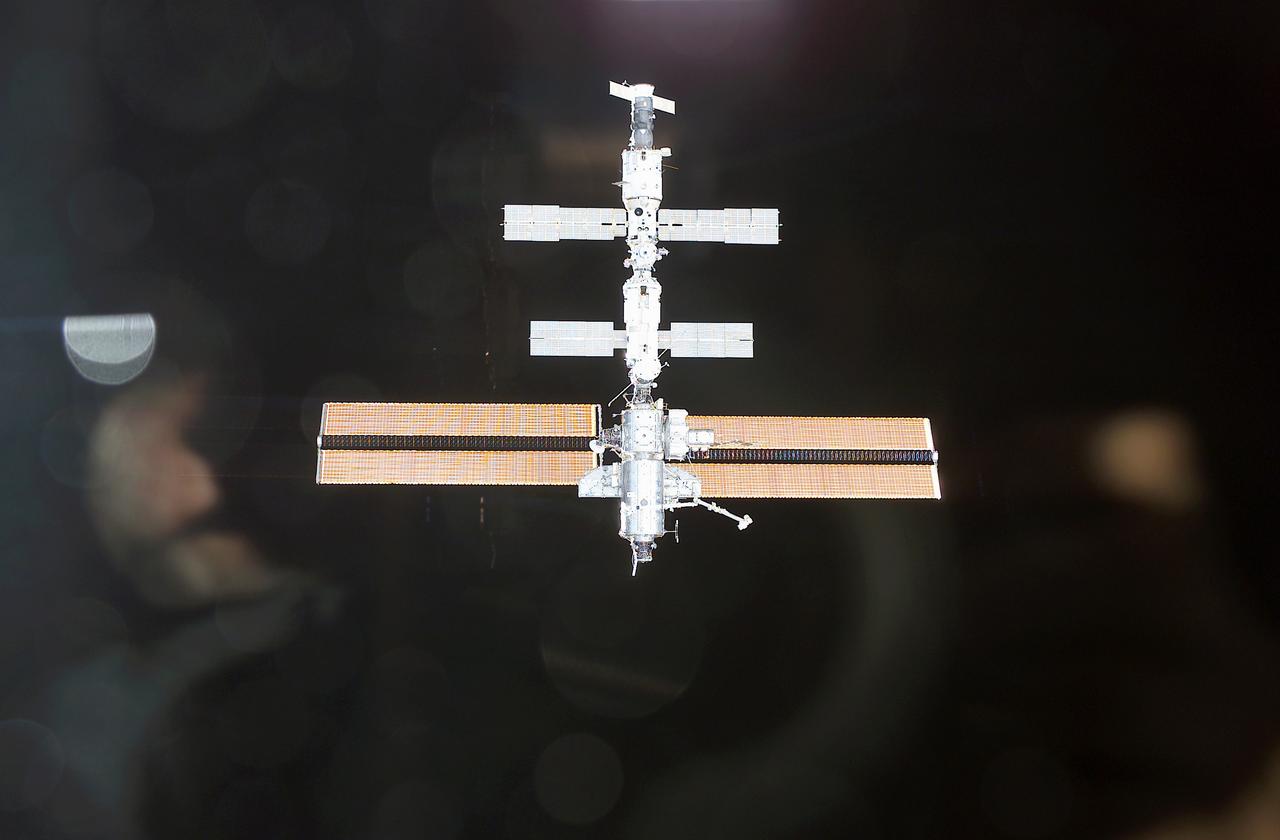
Backdropped against the blackness of space is the International Space Station (ISS), as viewed from the approching Space Shuttle Orbiter Endeavour, STS-111 mission, in June 2002. Expedition Five replaced Expedition Four crew after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.
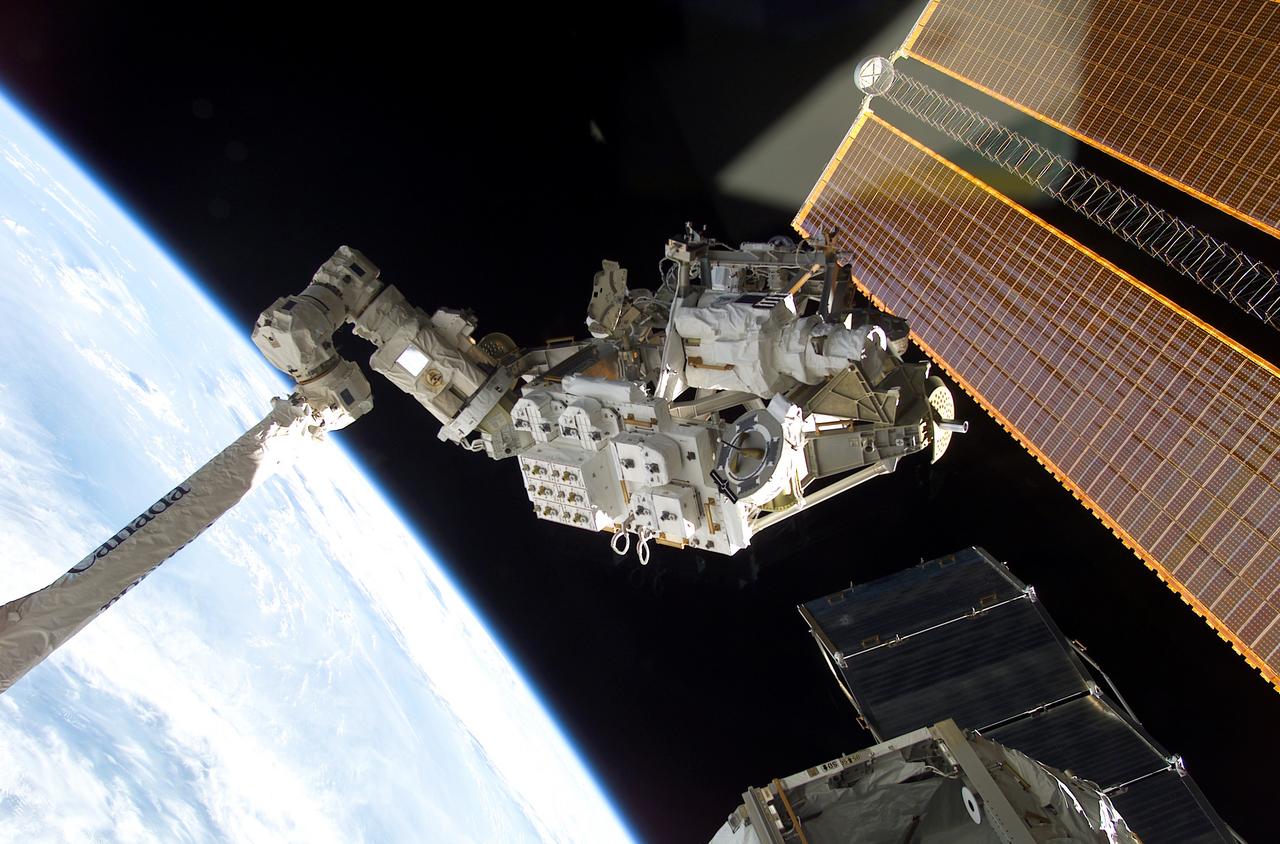
Backdropped against the blackness of space and the Earth's horizon, the Mobile Remote Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Delivered by the STS-111 mission aboard the Space Shuttle Endeavour in June 2002, the MBS is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station, which is neccessary for future construction tasks. In addition, STS-111 delivered a new crew, Expedition Five, replacing Expedition Four after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the MBS to the Mobile Transporter on the S0 (S-zero) truss, the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

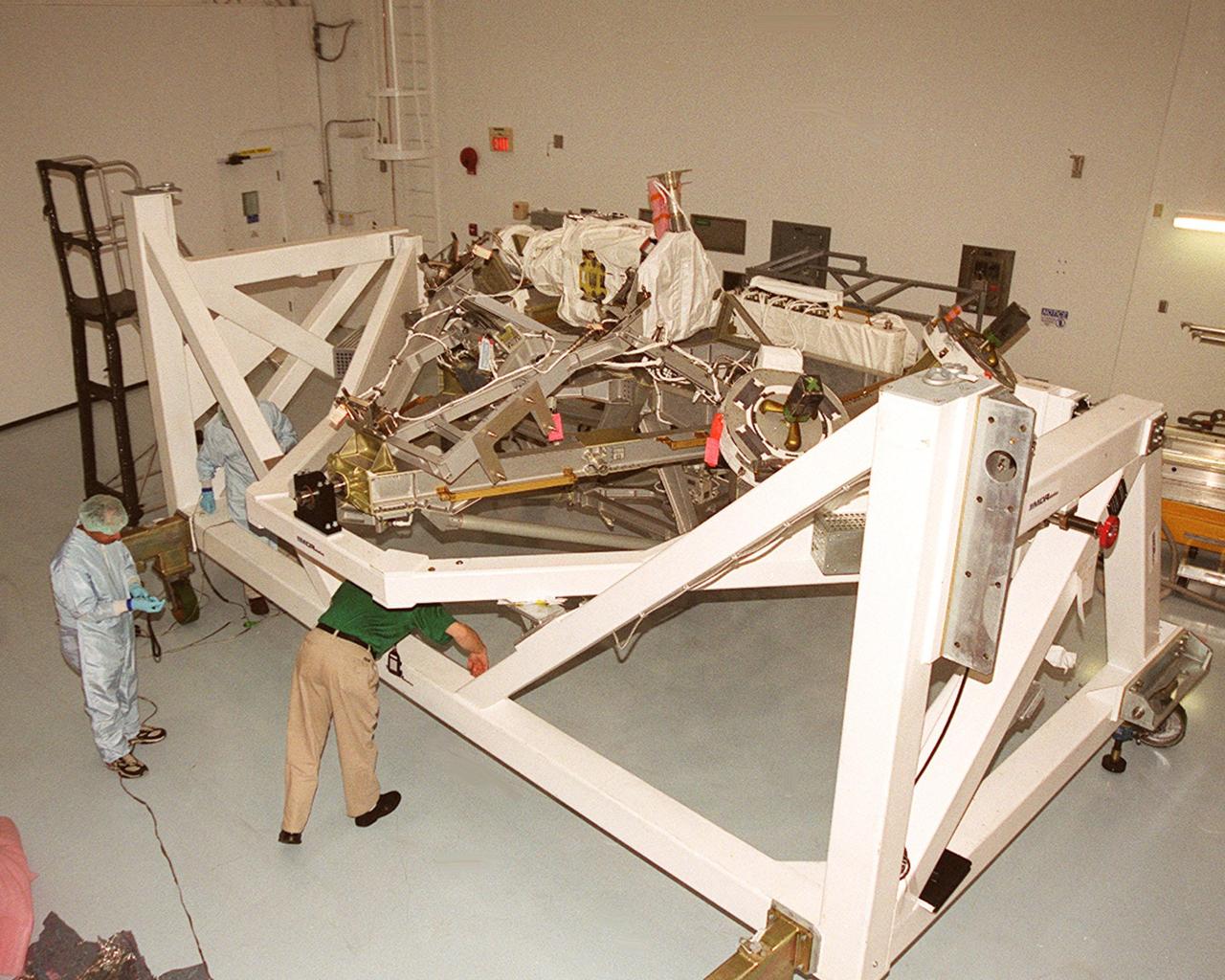
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
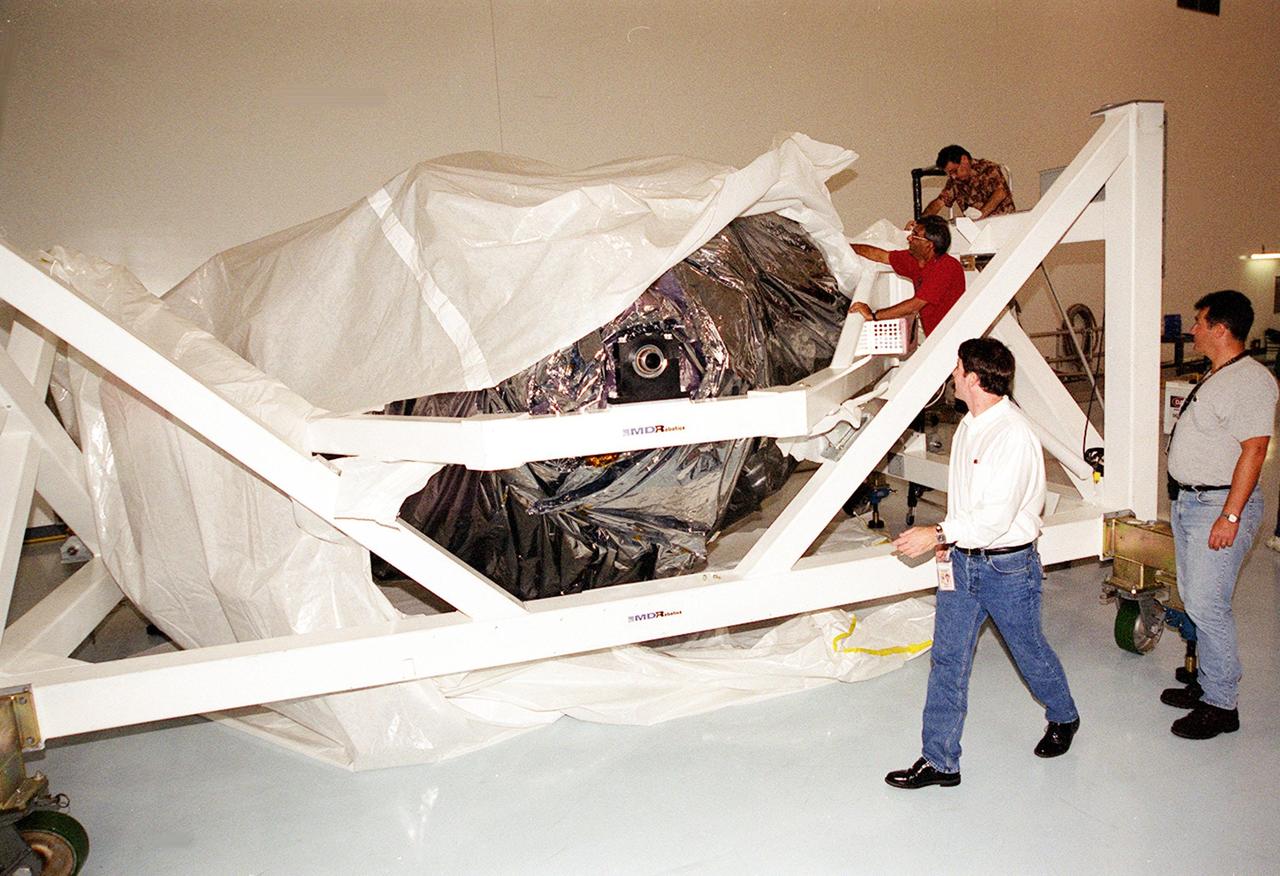
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

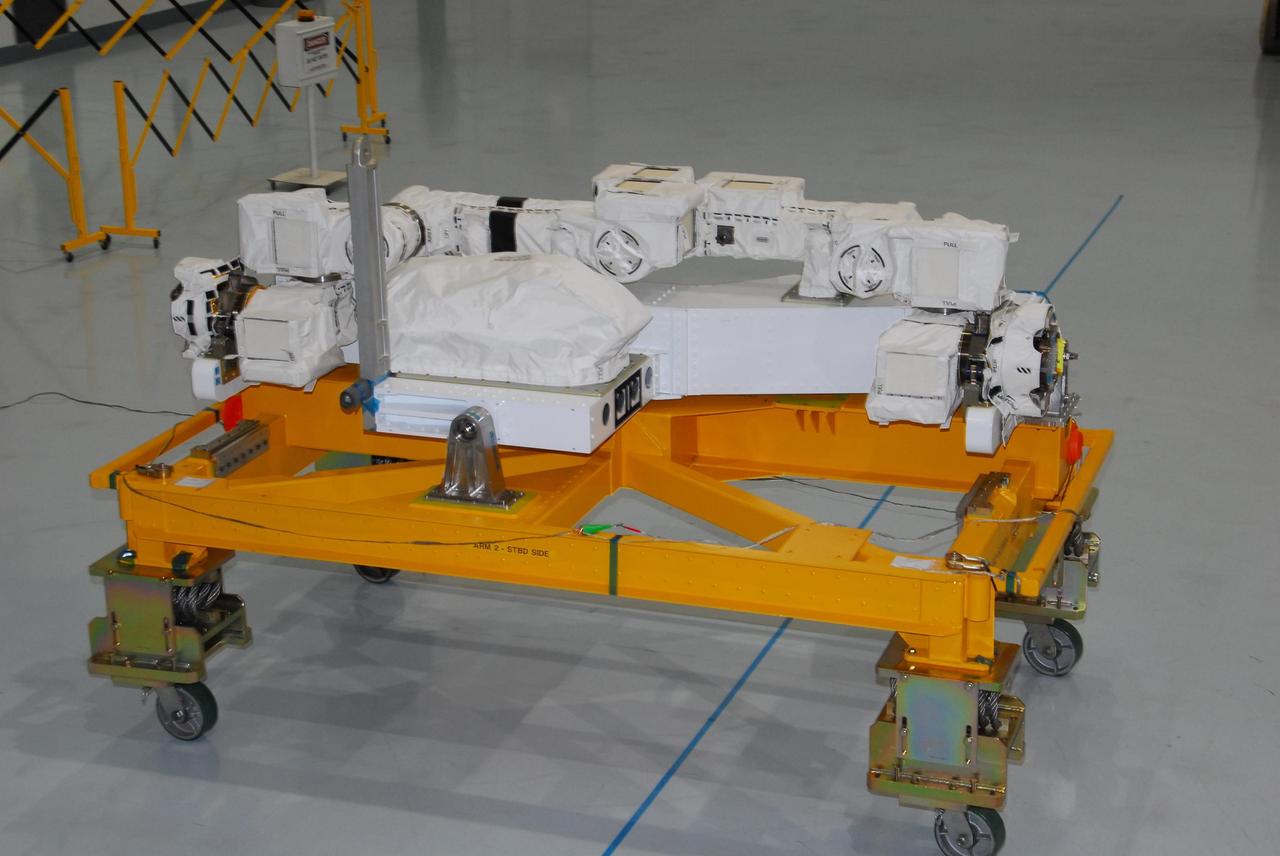
KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
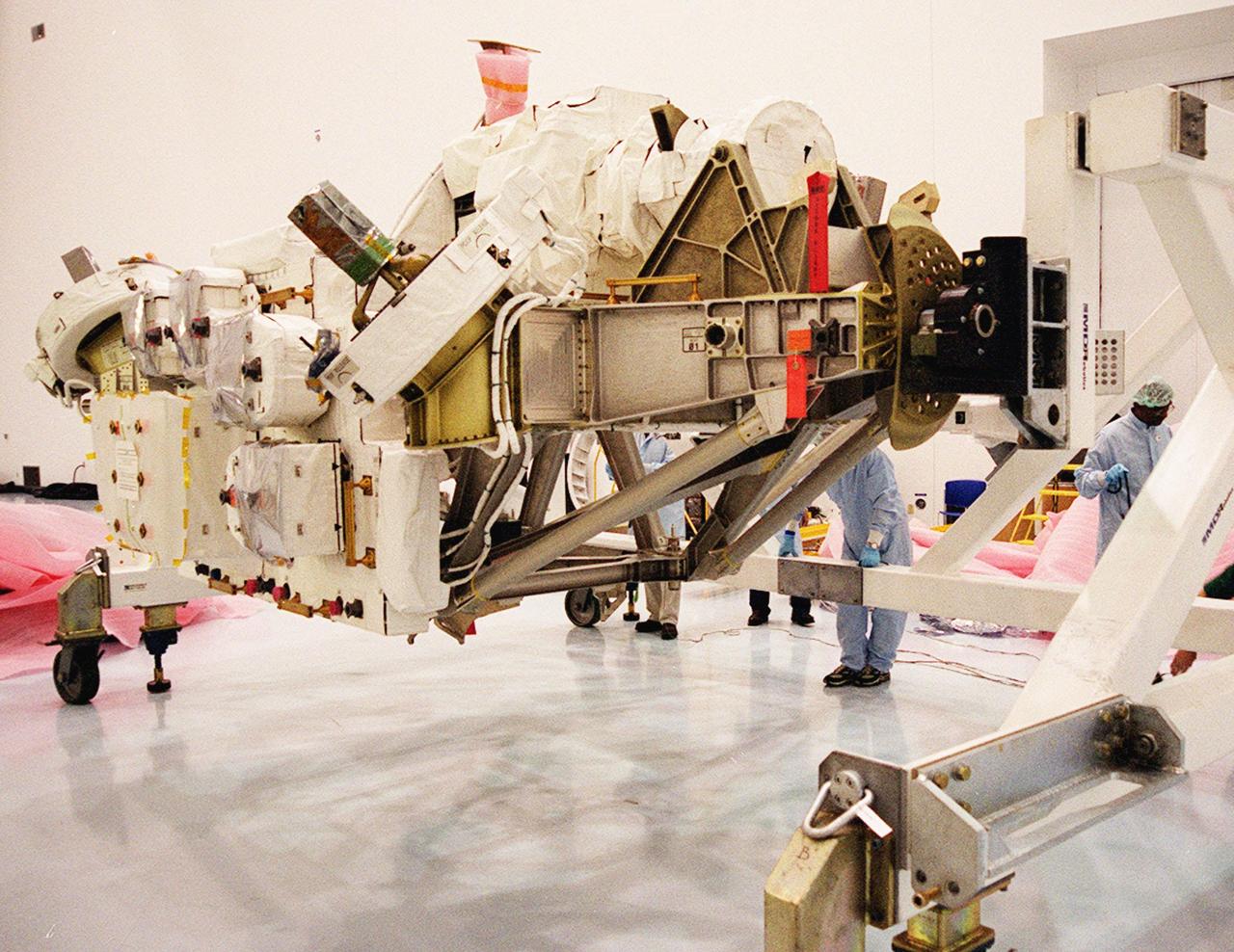
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
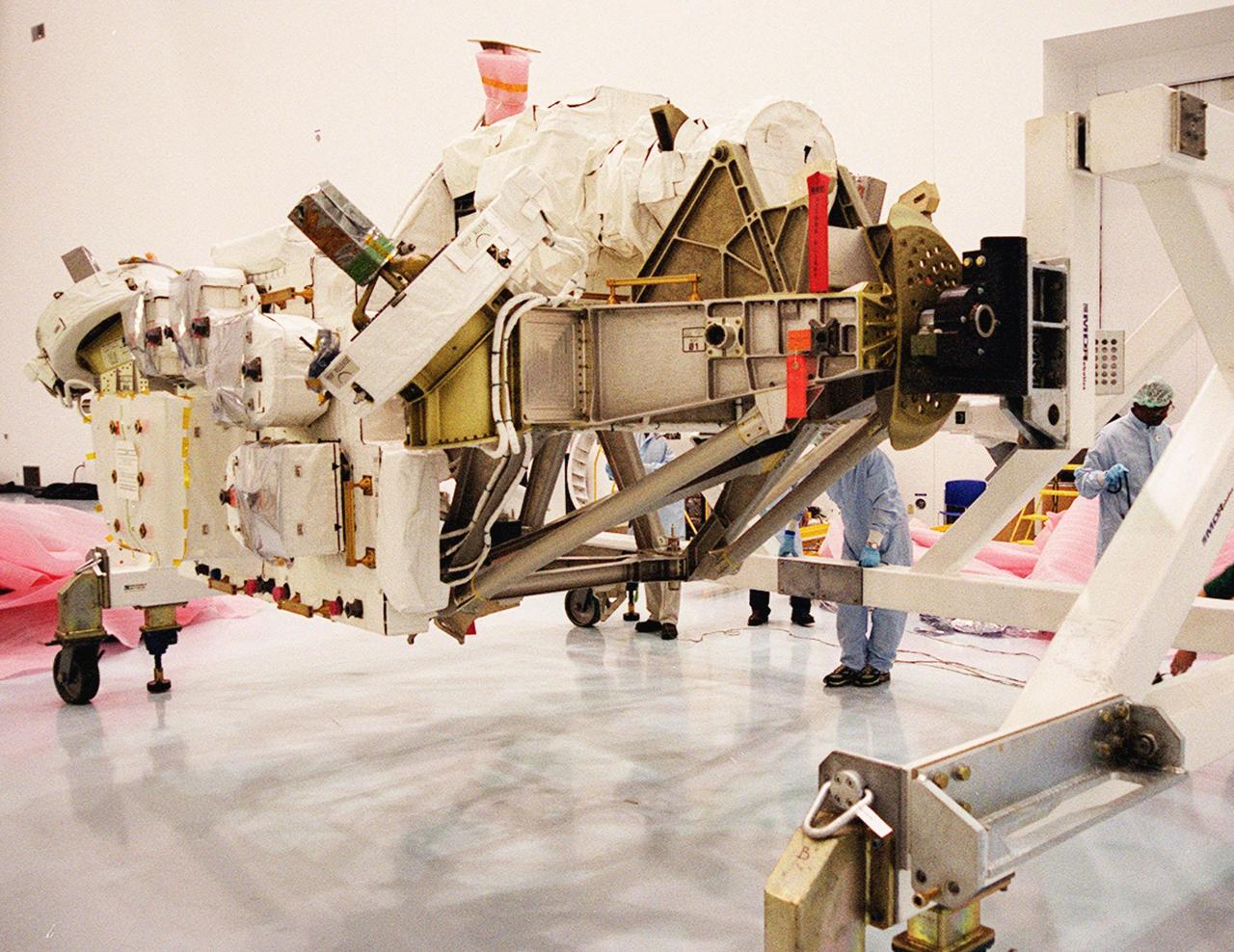
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

STS111-E-5183 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
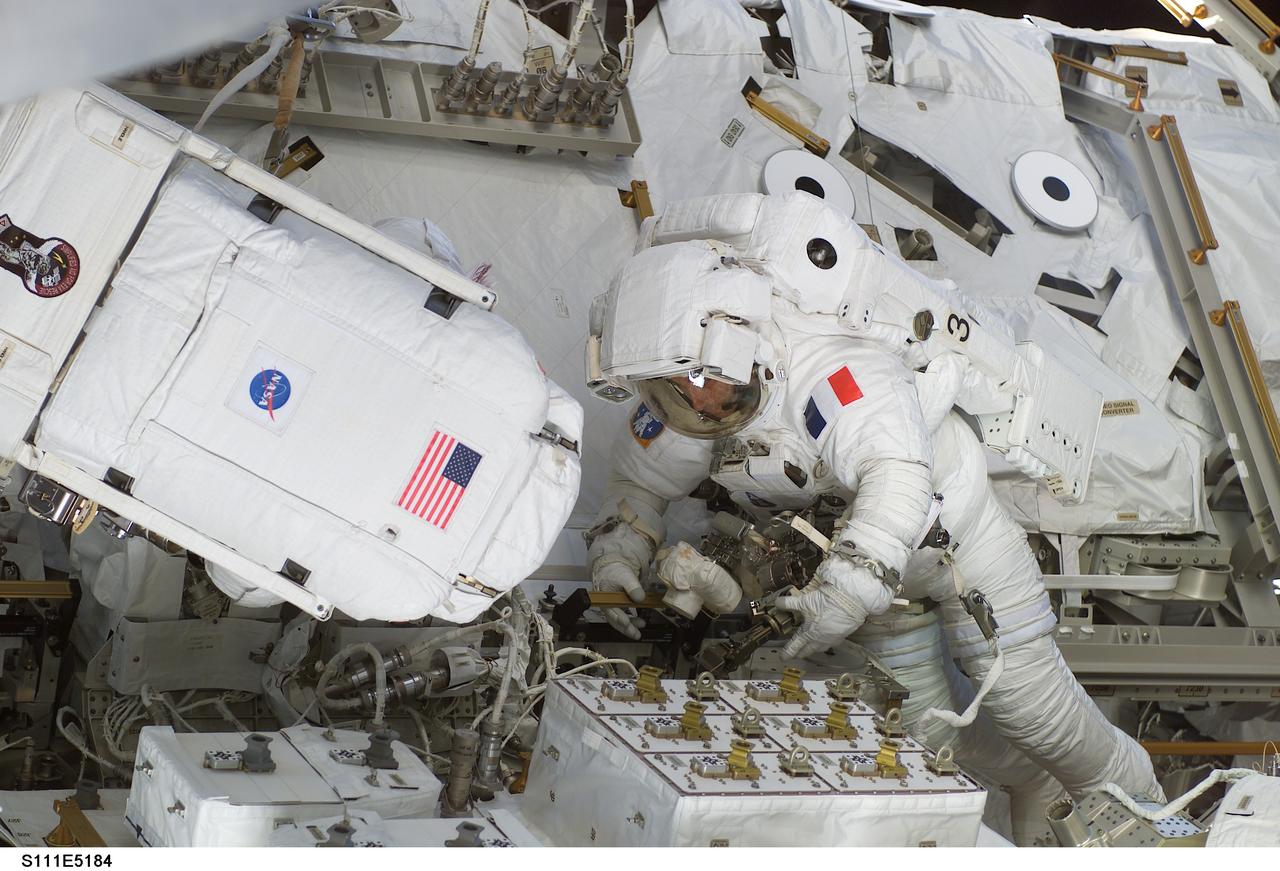
STS111-E-5184 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

ISS034-E-027317 (10 Jan. 2013) --- In the Cupola aboard the Earth-orbiting International Space Station, Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works the controls at the Robotic workstation to maneuver the Space Station Remote Manipulator System (SSRMS) or CanadArm2 from its parked position to grapple the Mobile Remote Servicer (MRS) Base System (MBS) Power and Data Grapple Fixture 4 (PDGF-4).

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station
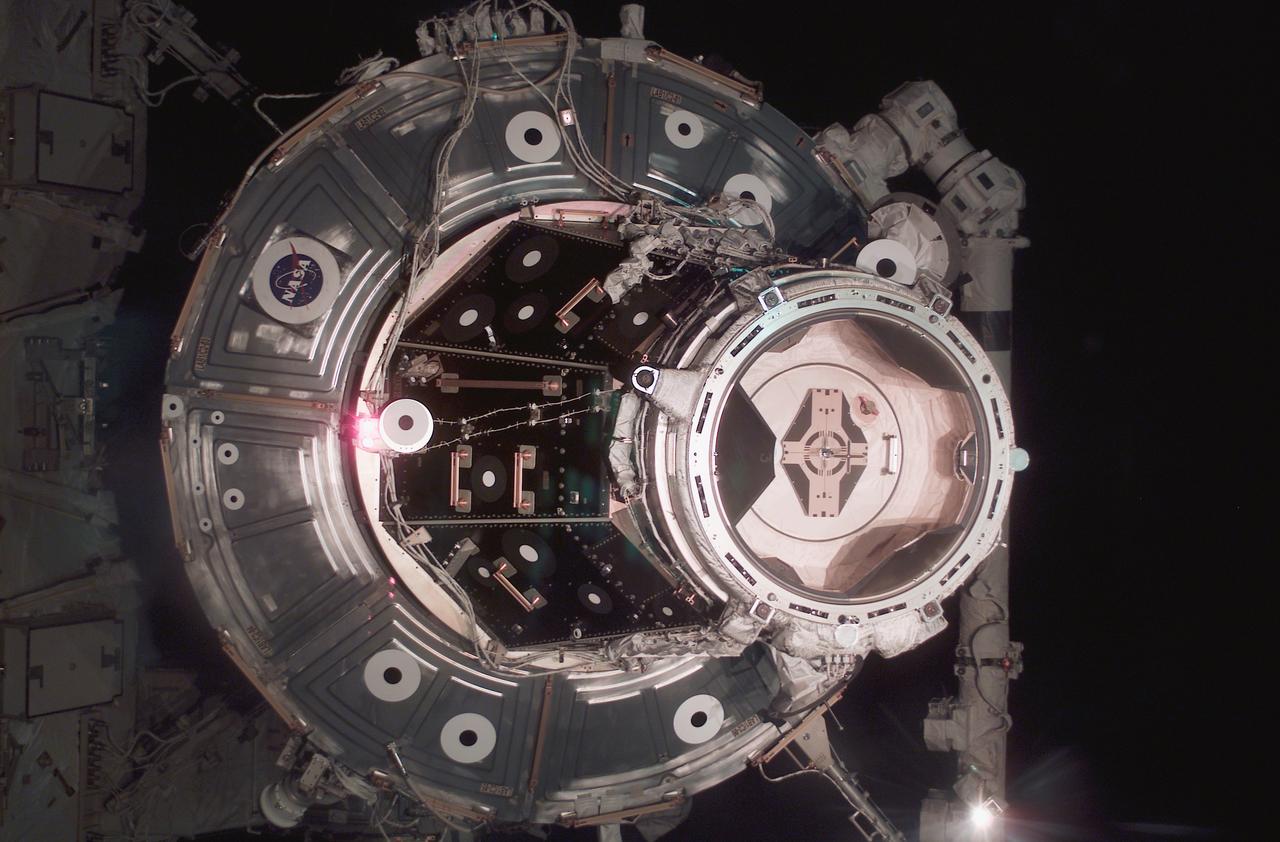
Pictured here is the forward docking port on the International Space Station's (ISS) Destiny Laboratory as seen by one of the STS-111 crewmembers from the Space Shuttle Orbiter Endeavour just prior to docking. In June 2002, STS-111 provided the Space Station with a new crew, Expedition Five, replacing Expedition Four after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of a new platform for the ISS robotic arm, the Mobile Base System (MBS) which is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments form the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

Pictured here is the Space Shuttle Orbiter Endeavour, STS-111 mission insignia. The International Space Station (ISS) recieved a new crew, Expedition Five, replacing Expedition Four after a record-setting 196 days in space, when STS-111 visited in June 2002. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of a new platform for the ISS robotic arm, the Mobile Base System (MBS) which is an important part of the Station's Mobile Servicing System allowing the robotic arm to travel the length of the Station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

Huddled together in the Destiny laboratory of the International Space Station (ISS) are the Expedition Four crew (dark blue shirts), Expedition Five crew (medium blue shirts) and the STS-111 crew (green shirts). The Expedition Four crewmembers are, from front to back, Cosmonaut Ury I. Onufrienko, mission commander; and Astronauts Daniel W. Bursch and Carl E. Waltz, flight engineers. The ISS crewmembers are, from front to back, Astronauts Kerneth D. Cockrell, mission commander; Franklin R. Chang-Diaz, mission specialist; Paul S. Lockhart, pilot; and Philippe Perrin, mission specialist. Expedition Five crewmembers are, from front to back, Cosmonaut Valery G. Korzun, mission commander; Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. The ISS recieved a new crew, Expedition Five, replacing Expedition Four after a record-setting 196 days in space, when the Space Shuttle Orbiter Endeavour STS-111 mission visited in June 2002. Three spacewalks enabled the STS-111 crew to accomplish additional mission objectives: the delivery and installation of the Mobile Base System (MBS), which is an important part of the station's Mobile Servicing System allowing the robotic arm to travel the length of the station; the replacement of a wrist roll joint on the Station's robotic arm; and unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

STS111-E-5142 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.

STS111-E-5139 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.

STS111-E-5226 (11 June 2002) --- Astronaut Franklin R. Chang-Diaz, STS-111 mission specialist, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Chang-Diaz and Perrin completed installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter.
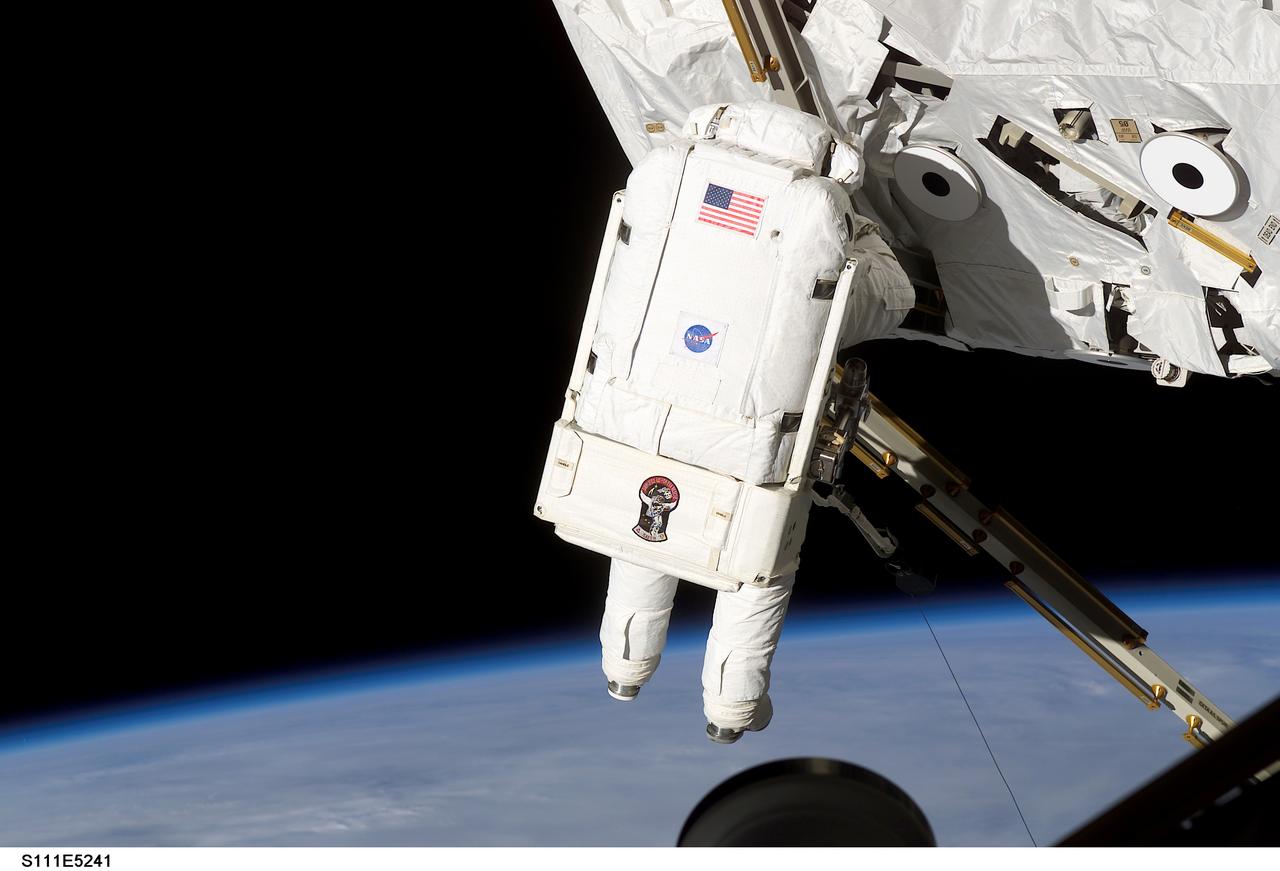
STS111-E-5241 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, photographed near the S0 (S-Zero) Truss on the International Space Station (ISS), participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Perrin and Chang-Diaz completed installation of the Mobile Remote Servicer Base System (MBS) on the station’s railcar, the Mobile Transporter. Perrin represents CNES, the French Space Agency.

STS111-E-5238 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.
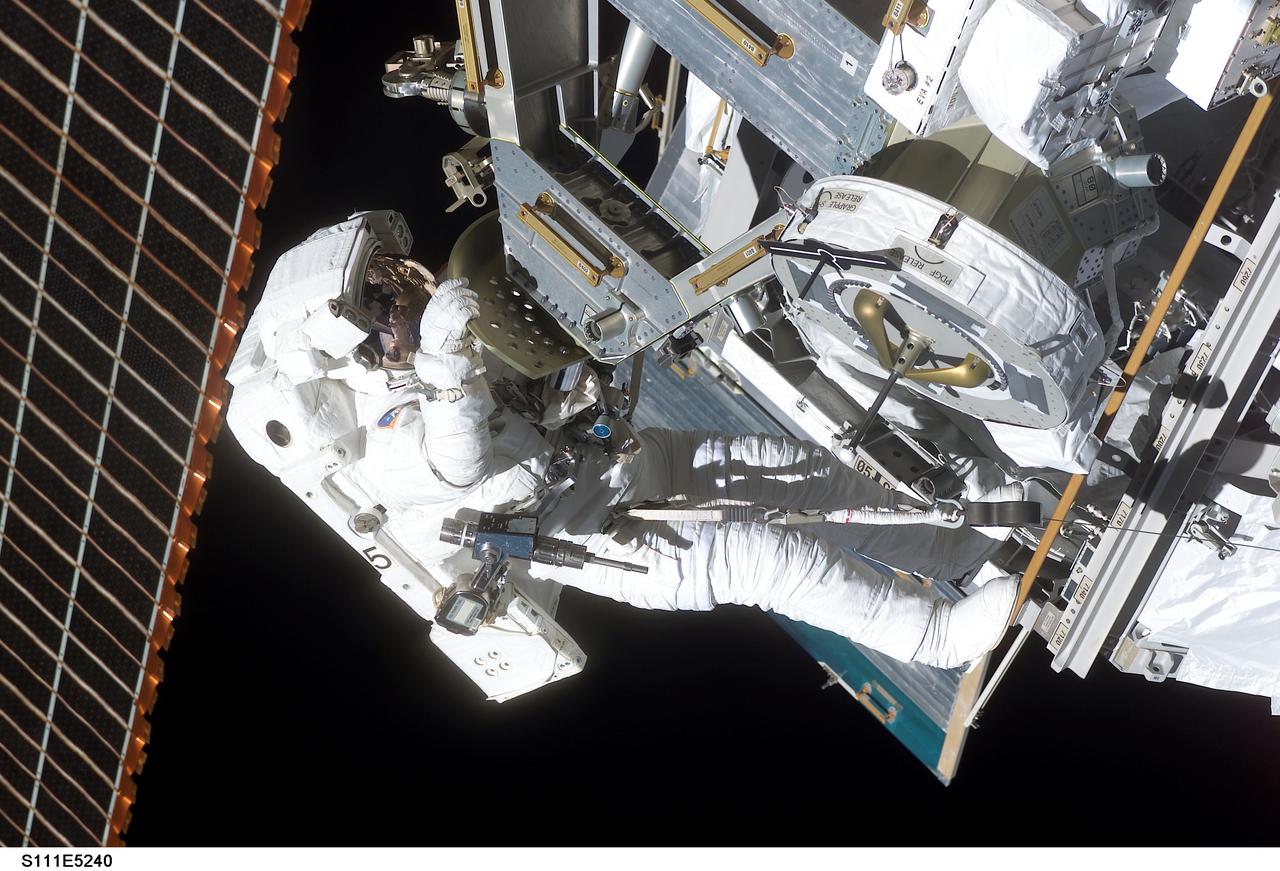
STS111-E-5240 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians aid with the lowering of the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, toward the base. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is moved toward the base, in the background. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is moved across the facility. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians help guide the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, into place for installation on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is ready to be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station ISS. Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is lowered toward the base for installation. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians help guide the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, into place for installation on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians begin raising the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, for its move across the facility. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station ISS. Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves nearer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves closer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister at right for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, an overhead crane moves the Special Purpose Dexterous Manipulator, known as Dextre, to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company
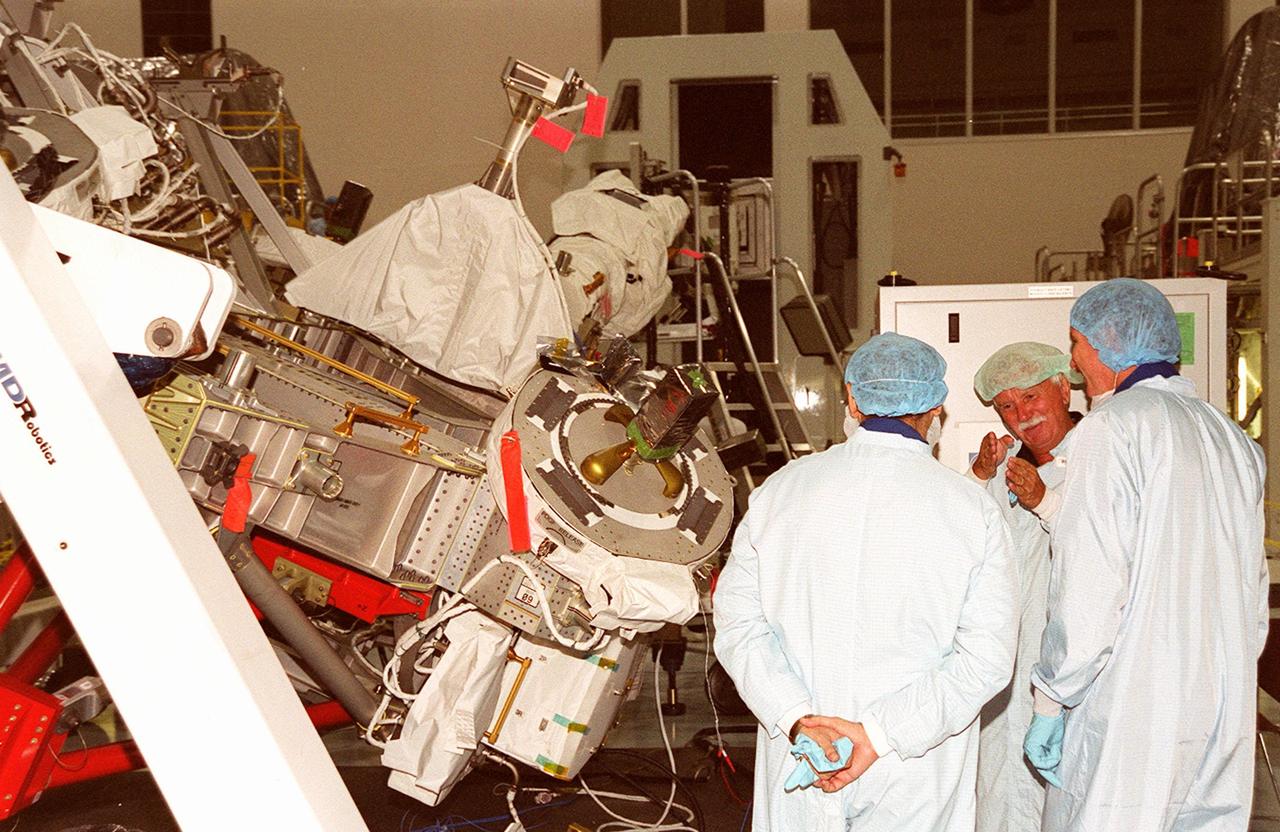
A worker in the Space Station Processing Facility makes a point during discussion of the hardware at left, the Mobile Base System (MBS), with STS-100 crew members. The crew is at KSC for Crew Equipment Interface Test activities. Mission STS-100 is scheduled to launch April 19, 2001, carrying the Space Station Remote Manipulator System (SSRMS), as well as Raffaello, a multi-purpose logistics module. The MBS is part of the SSRMS and will complete the Canadian Mobile Servicing System, or MSS. A mechanical arm, the MBS will have the capability to “inchworm” from the U.S. Lab fixture to the MSS and travel along the truss to work sites on the Space Station. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station
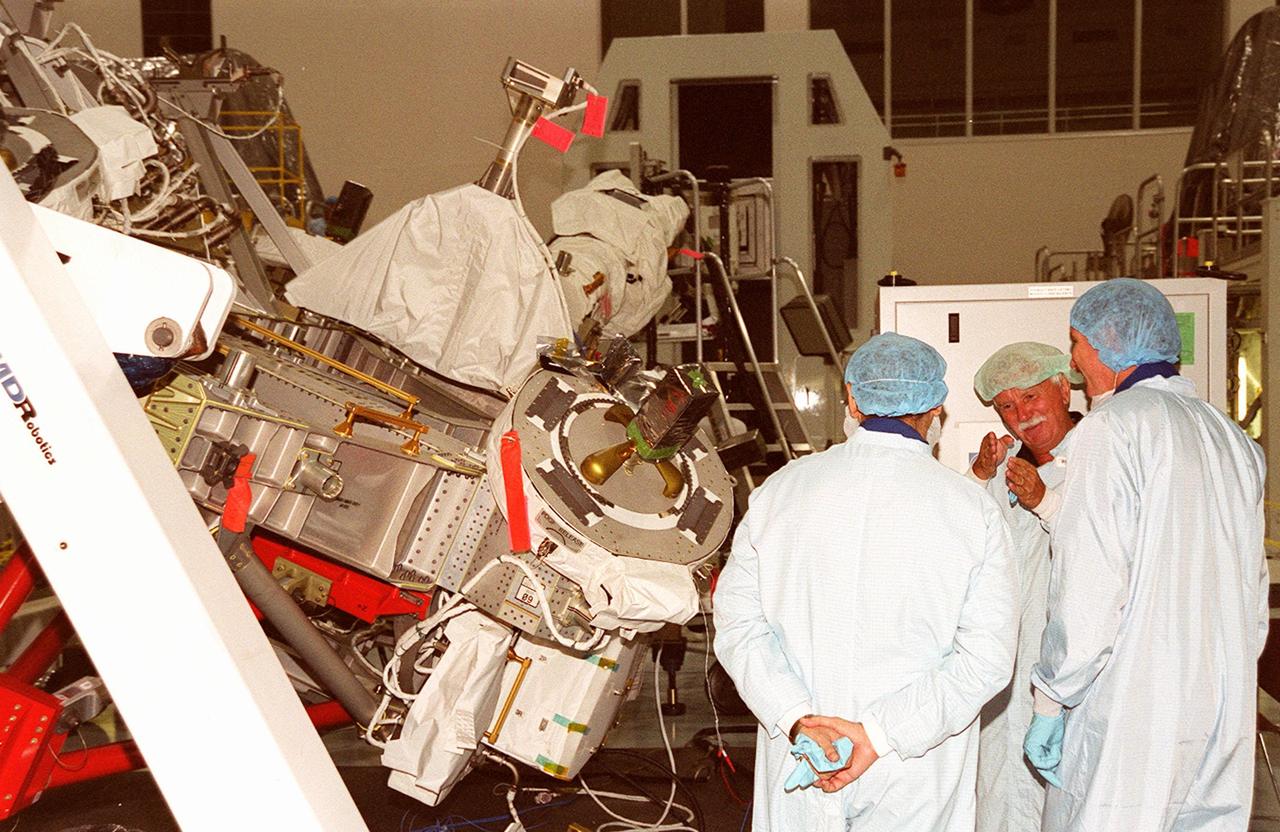
A worker in the Space Station Processing Facility makes a point during discussion of the hardware at left, the Mobile Base System (MBS), with STS-100 crew members. The crew is at KSC for Crew Equipment Interface Test activities. Mission STS-100 is scheduled to launch April 19, 2001, carrying the Space Station Remote Manipulator System (SSRMS), as well as Raffaello, a multi-purpose logistics module. The MBS is part of the SSRMS and will complete the Canadian Mobile Servicing System, or MSS. A mechanical arm, the MBS will have the capability to “inchworm” from the U.S. Lab fixture to the MSS and travel along the truss to work sites on the Space Station. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station

The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot; and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valeri G. Korzun, commander; Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks. In this photograph, Astronaut Philippe Perrin, representing CNES, the French Space Agency, participates in the second scheduled EVA. During the space walk, Perrin and Chang-Diaz attached power, data, and video cables from the ISS to the MBS, and used a power wrench to complete the attachment of the MBS onto the Mobile Transporter (MT).
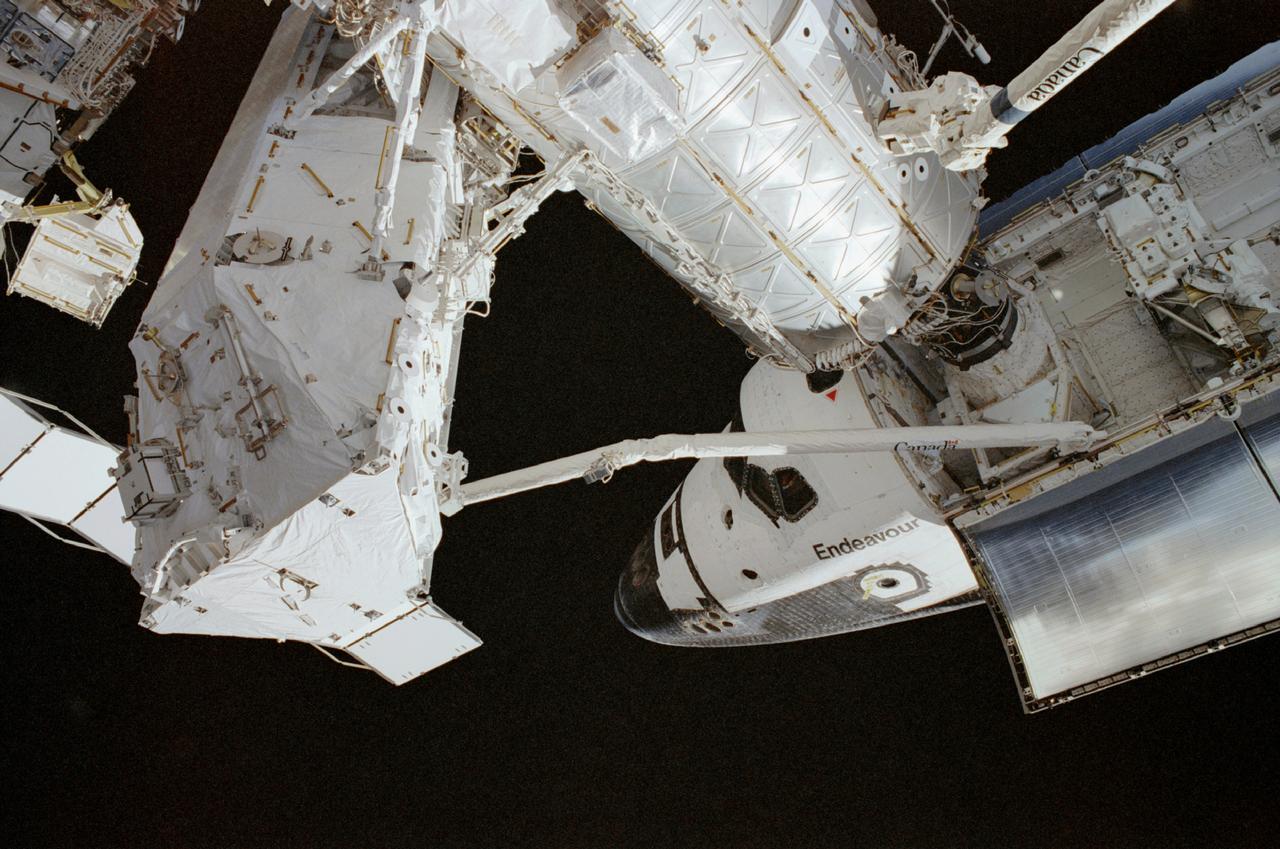
The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot, and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valeri G. Korzun, commander, Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish mission objectives: The delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm; and the task of unloading supplies and science experiments from the Leonardo multipurpose Logistics Module, which made its third trip to the orbital outpost. In this photograph, the Space Shuttle Endeavour, back dropped by the blackness of space, is docked to the pressurized Mating Adapter (PMA-2) at the forward end of the Destiny Laboratory on the ISS. Endeavour's robotic arm is in full view as it is stretched out with the S0 (S-zero) Truss at its end.
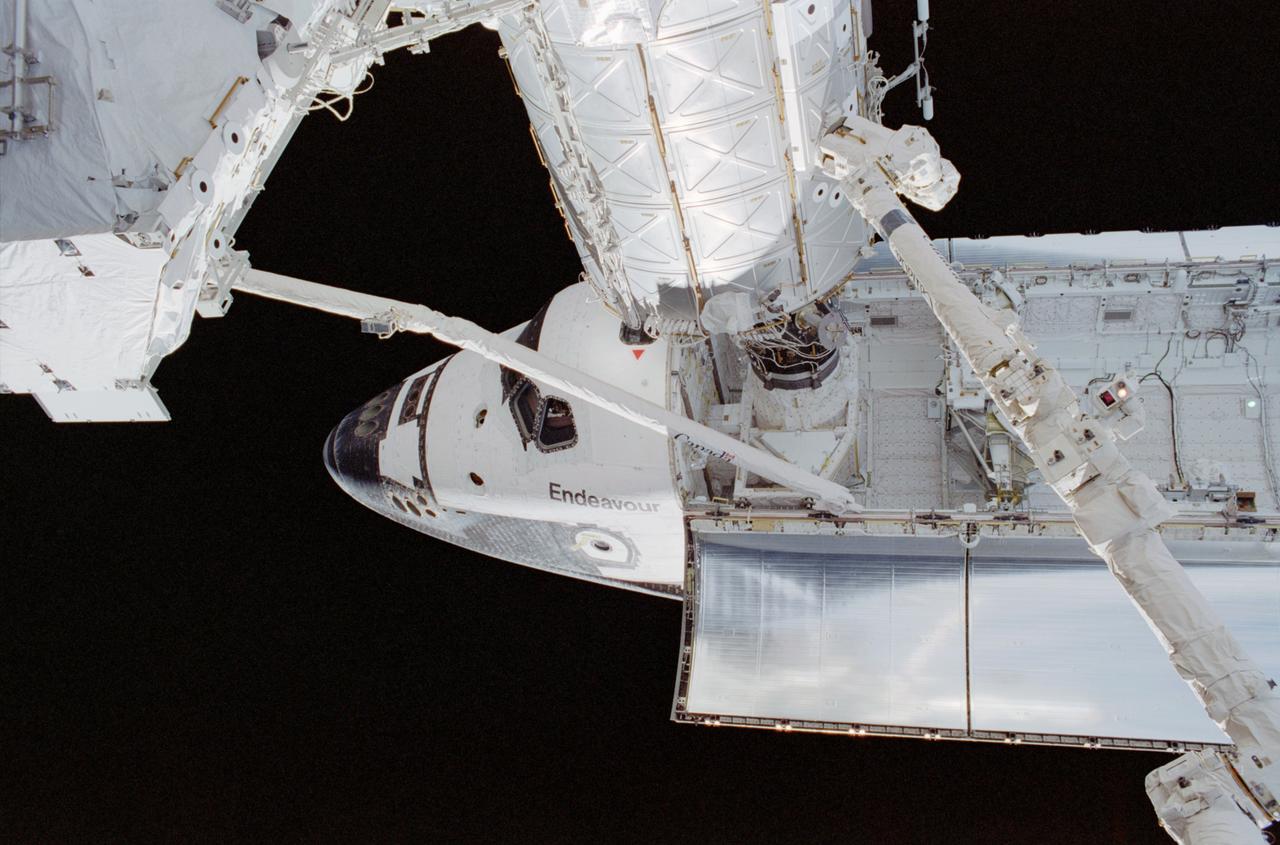
The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot, and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valeri G. Korzun, commander, Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm; and the task of unloading supplies and science experiments from the Leonardo multipurpose Logistics Module, which made its third trip to the orbital outpost. In this photograph, the Space Shuttle Endeavour, back dropped by the blackness of space, is docked to the pressurized Mating Adapter (PMA-2) at the forward end of the Destiny Laboratory on the ISS. A portion of the Canadarm2 is visible on the right and Endeavour's robotic arm is in full view as it is stretched out with the S0 (S-zero) Truss at its end.

The STS-111 mission, the 14th Shuttle mission to visit the International Space Station (ISS), was launched on June 5, 2002 aboard the Space Shuttle Orbiter Endeavour. On board were the STS-111 and Expedition Five crew members. Astronauts Kerneth D. Cockrell, commander; Paul S. Lockhart, pilot; and mission specialists Franklin R. Chang-Diaz and Philippe Perrin were the STS-111 crew members. Expedition Five crew members included Cosmonaut Valery G. Korzun, commander; and Astronaut Peggy A. Whitson and Cosmonaut Sergei Y. Treschev, flight engineers. Three space walks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks. In this photograph, Astronaut Franklin R. Chang-Diaz participates in the first scheduled session of extra vehicular activity (EVA) for the STS-111 mission. During the space walk, Chang-Diaz and Perrin attached a Power and Data Grapple Fixture onto the ISS's P6 Truss, setting the stage for the future relocation of the P6. The next major task was to remove Service Module Debris Panels from Space Shuttle Endeavour's payload bay and attach them to their temporary location on Pressurized Mating Adapter 1 (PMA-1). The space walkers also removed thermal blankets to prepare the MBS for installation onto the station's Mobile Transporter (MT).