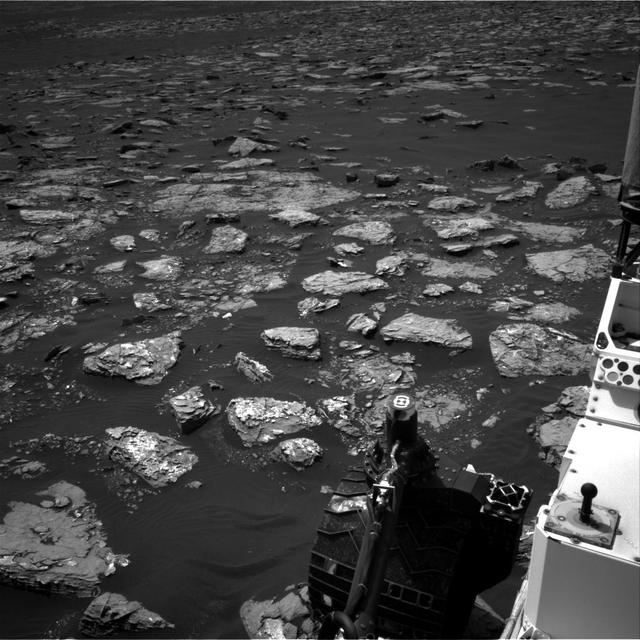
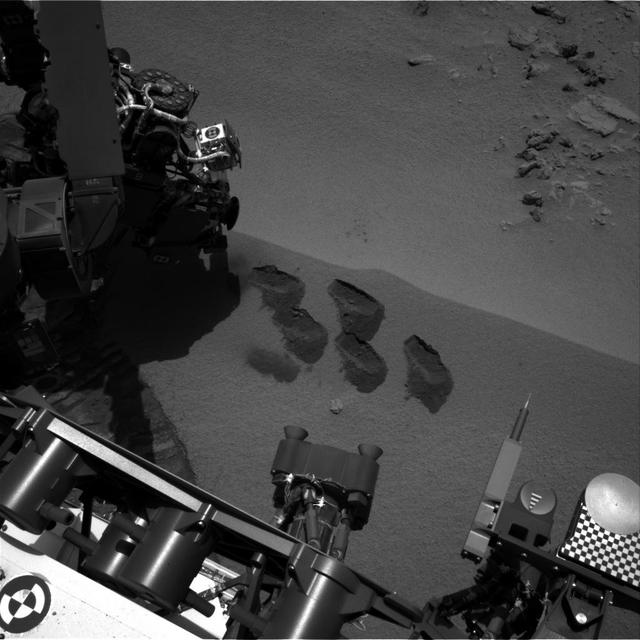
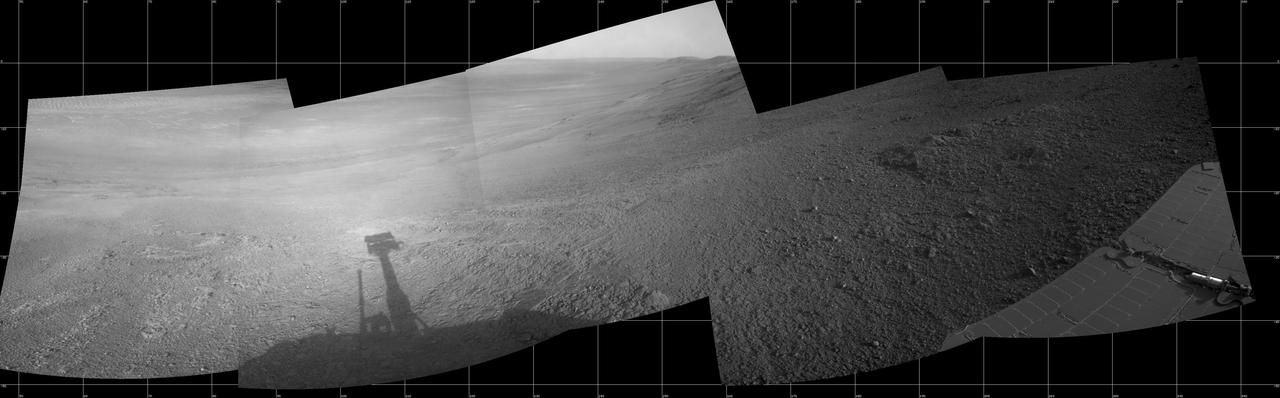
This view from the Navigation Camera (Navcam) on the mast of NASA's Curiosity Mars rover shows rocky ground within view while the rover was working at an intended drilling site called "Precipice" on lower Mount Sharp. The right-eye camera of the stereo Navcam took this image on Dec. 2, 2016, during the 1,537th Martian day, or sol, of Curiosity's work on Mars. On the previous sol, an attempt to collect a rock-powder sample with the rover's drill ended before drilling began. This led to several days of diagnostic work while the rover remained in place, during which it continued to use cameras and a spectrometer on its mast, plus environmental monitoring instruments. In this view, hardware visible at lower right includes the sundial-theme calibration target for Curiosity's Mast Camera. http://photojournal.jpl.nasa.gov/catalog/PIA21140
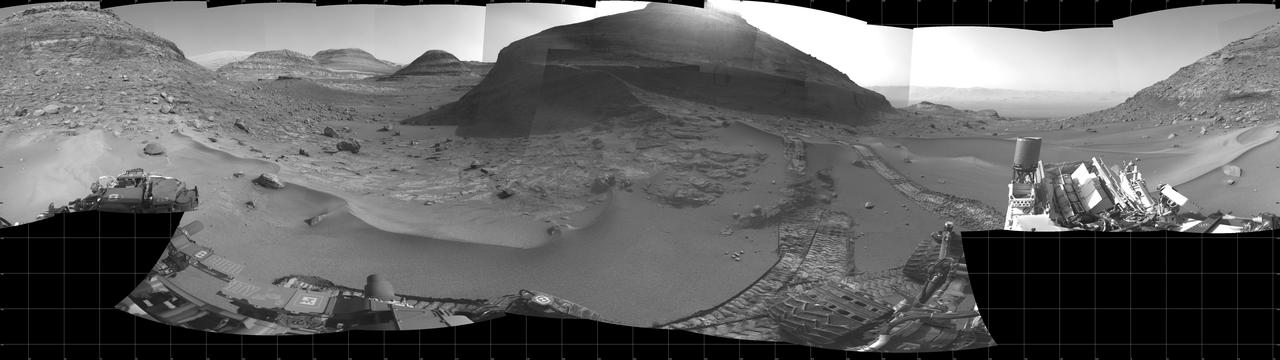
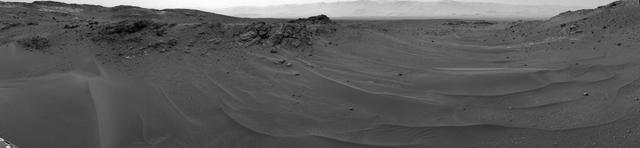
NASA's Curiosity Mars rover used its navigation cameras, or Navcams, to capture this panorama of the narrow "Paraitepuy Pass" on Aug. 11, 2022, the 3,560th Martian day, or sol, of the mission. The pass, with hills in the distance, can be seen on the left side of the scene. The hill in the center of this scene is "Bolívar"; "Deepdale" is on the far left of the scene. The crater floor is visible in the background of the right side of the panorama. https://photojournal.jpl.nasa.gov/catalog/PIA25417

This video, taken by the Navigation Cameras, or Navcams, on the Mast of NASA's Curiosity Mars rover, shows the rover's robotic arm as it rotates to take a selfie. A camera at the end of the arm captured 86 individual images that were later stitched into a panorama. The Navcams are black-and-white cameras generally used to help engineers plan Curiosity's movements. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA23625

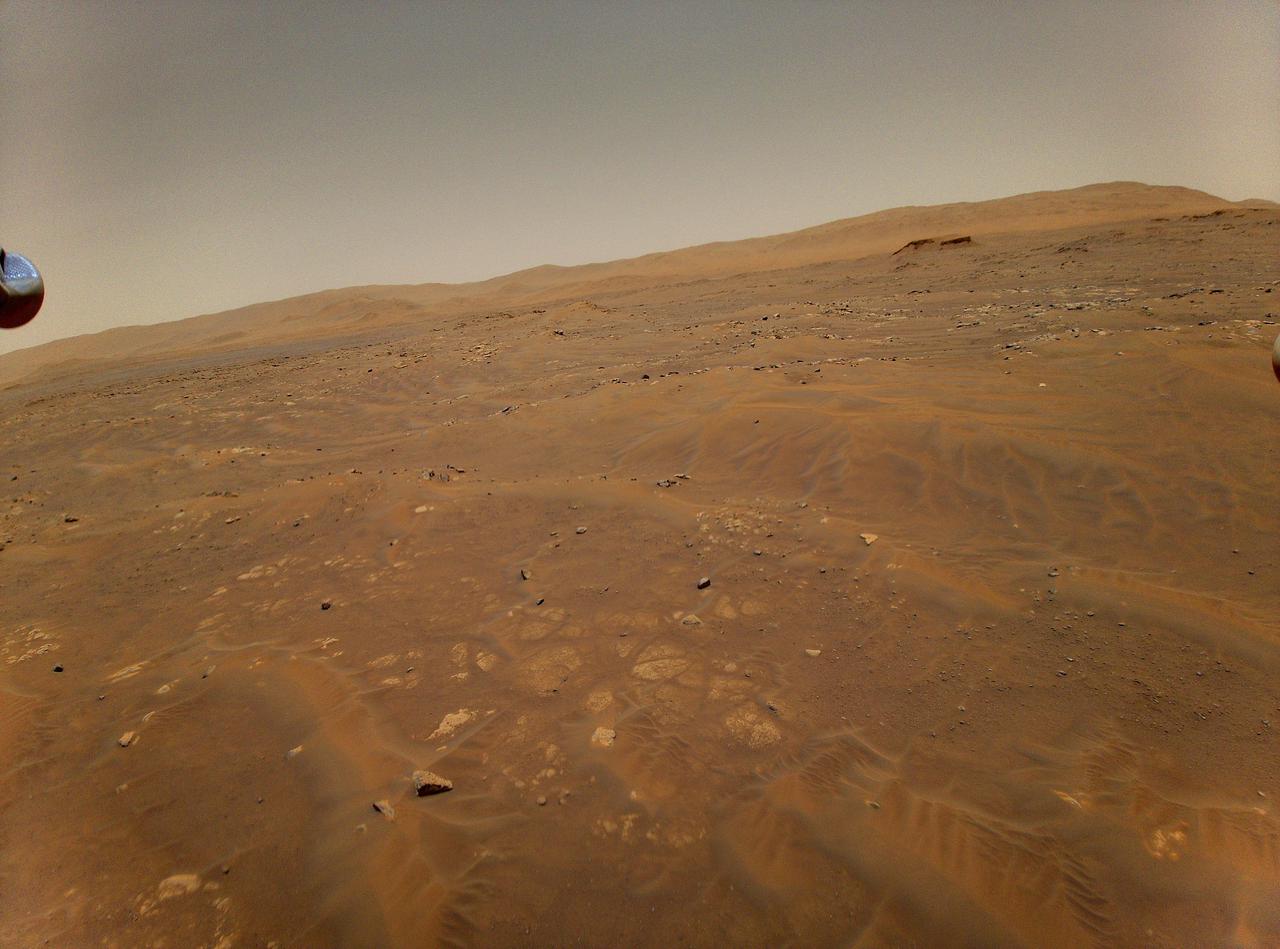
NASA's Mars Perseverance rover acquired this image using its onboard left Navigation Camera (Navcam). The camera is located high on the rover's mast and aids in driving. This image was acquired on March 7, 2021 (Sol 16) at the local mean solar time of 15:04:10. https://photojournal.jpl.nasa.gov/catalog/PIA23729
One of the Navcam imagers aboard NASA's Perseverance Mars rover captured the Ingenuity Mars Helicopter on Feb. 26, 2023, the 719th Martian day, or sol, of the mission. The helicopter is visible in the upper left of image. Ingenuity had landed there, at "Airfield Theta," on the previous sol at the conclusion of its 46th flight on Mars. At the time this enhanced image was taken, the helicopter was approximately 490 feet (150 meters) from the rover. Figure A is the same enhanced image annotated to indicate the location of the Mars Helicopter in the distance. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet.NASA's Jet Propulsion Laboratory, which is managed for the agency by Caltech in Pasadena, California, built and manages operations of the Perseverance rover. https://photojournal.jpl.nasa.gov/catalog/PIA25685

The Navigation Cameras, or Navcams, aboard NASA's Perseverance Mars rover captured this view of the rover's deck on Feb. 20, 2021. This view provides a good look at PIXL (the Planetary Instrument for X-ray Lithochemistry), one of the instruments on the rover's stowed arm. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA24421

This panorama, taken on Feb. 20, 2021, by the Navigation Cameras, or Navcams, aboard NASA's Perseverance Mars rover, was stitched together from six individual images after they were sent back to Earth. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith. Subsequent missions, currently under consideration by NASA in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these cached samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA24422
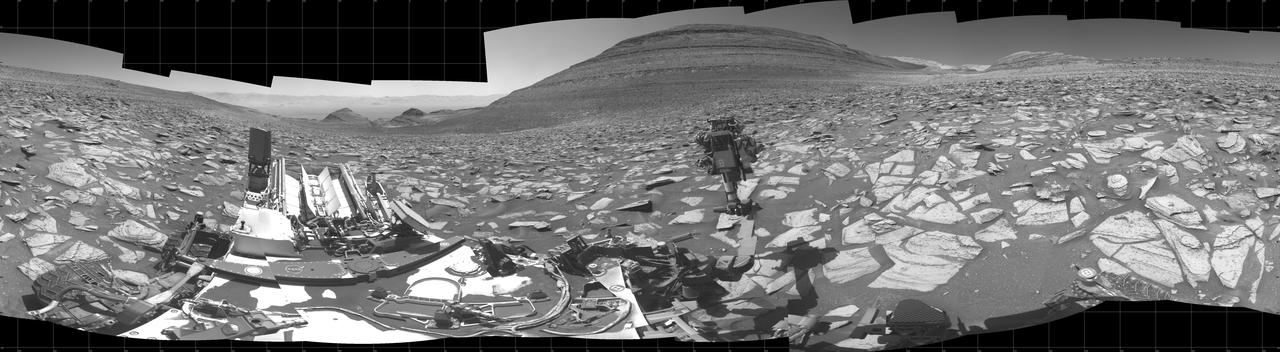
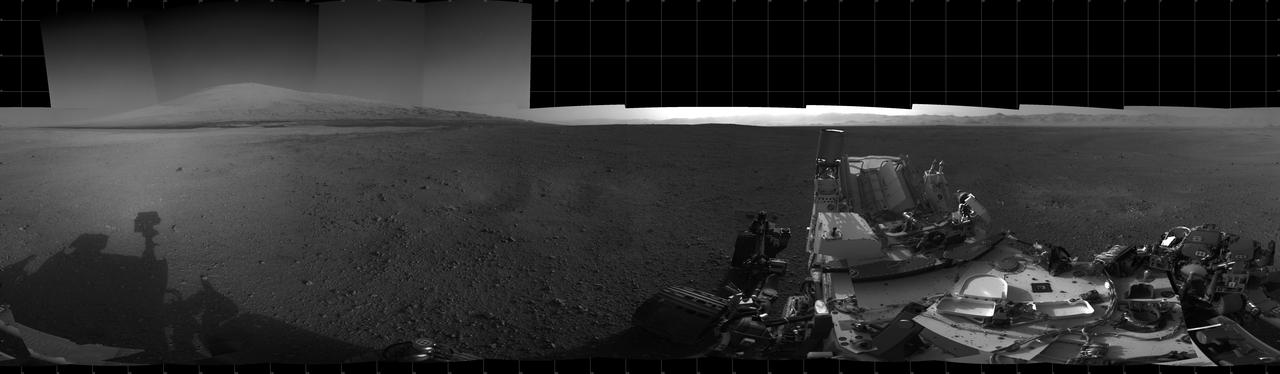
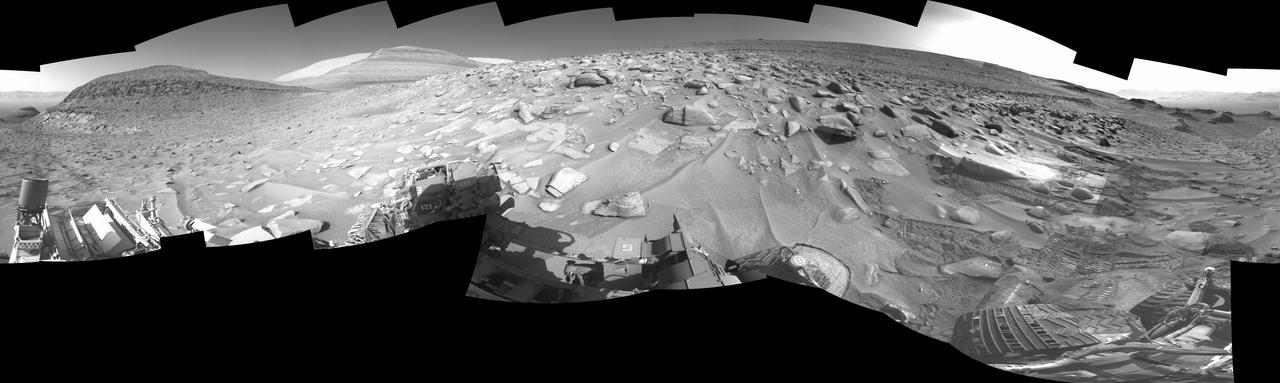
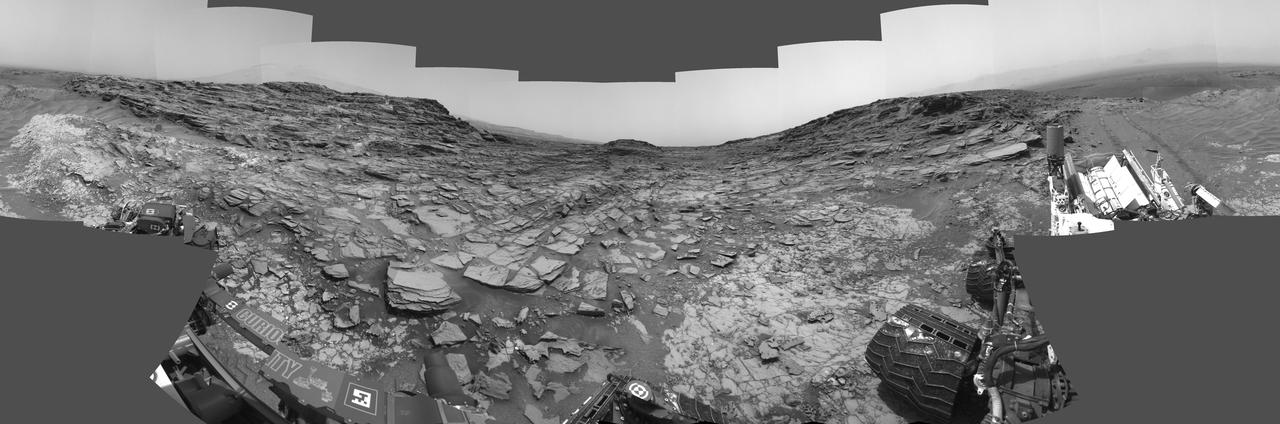
NASA's Curiosity Mars rover captured this 360-degree panorama using its black-and-white navigation cameras, or Navcams, at a location where it collected a sample from a rock nicknamed "Sequoia." This panorama was captured on Oct. 21 and 26, 2023, the 3,984th and 3,989th Martian days, or sols, of the mission. The sample from Sequoia marks the 39th hole that Curiosity drilled into the Martian surface. While the Perseverance rover collects intact rock cores, Curiosity's rock samples are powderized, then sprinkled into instruments within the rover's chassis. These instruments can provide highly detailed compositional data. Since 2014, Curiosity has been ascending the 3-mile-tall (5-kilometer-tall) Mount Sharp, a mountain with distinct layers that formed in different eras of ancient Martian history. By studying the differences between these layers, scientists are learning more about how the Martian climate – and especially its water – changed over time. https://photojournal.jpl.nasa.gov/catalog/PIA26047
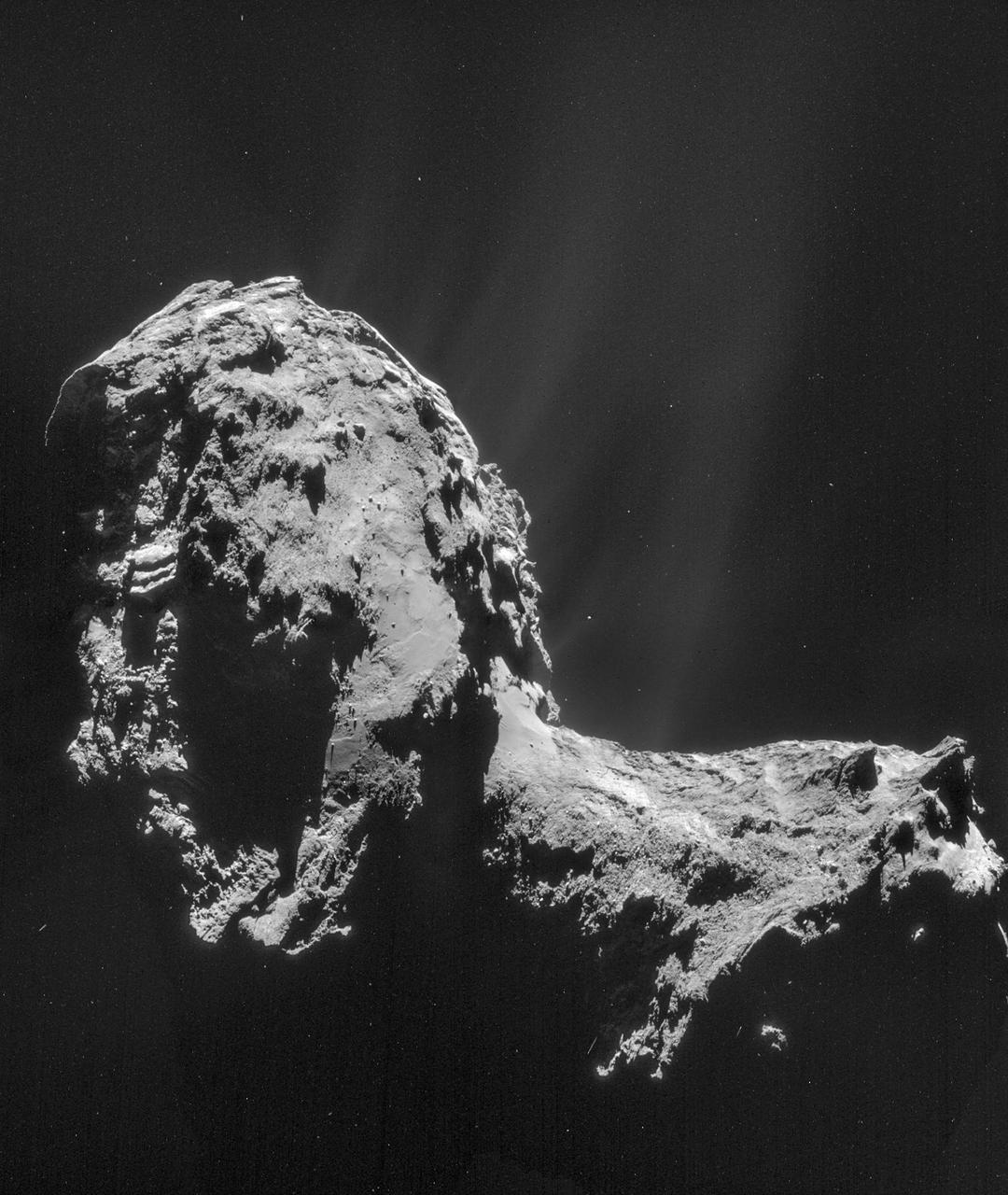
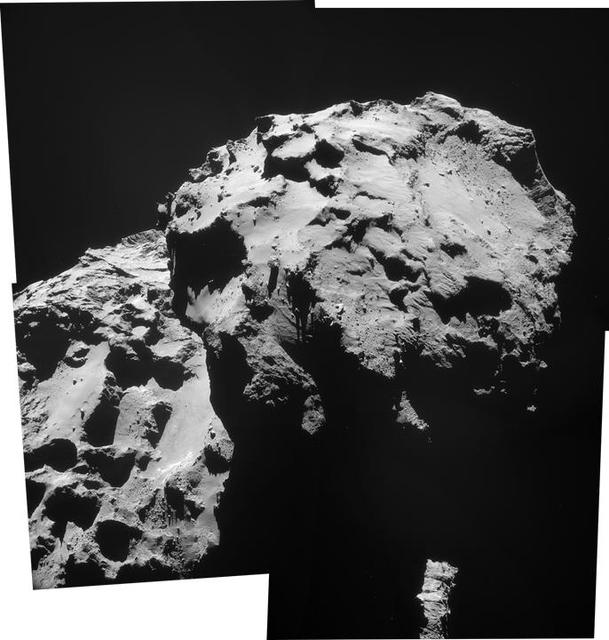
This composite is a mosaic comprising four individual Rosetta NAVCAM images taken from 19 miles 31 kilometers from the center of comet 67P/Churyumov-Gerasimenko on Nov. 20, 2014.
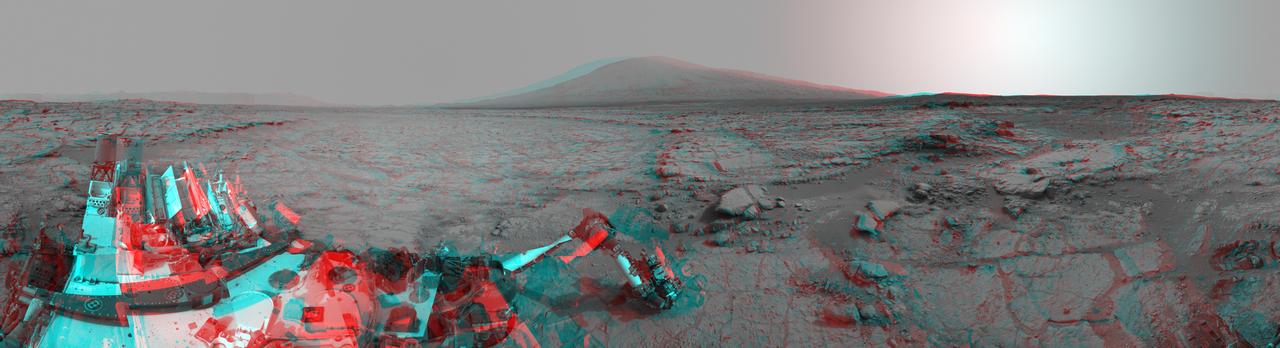
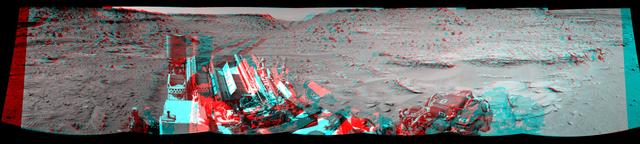
The left and right eyes of the Navigation Camera Navcam in NASA Curiosity Mars rover took the dozens of images combined into this 3-D scene of the rover and its surroundings.
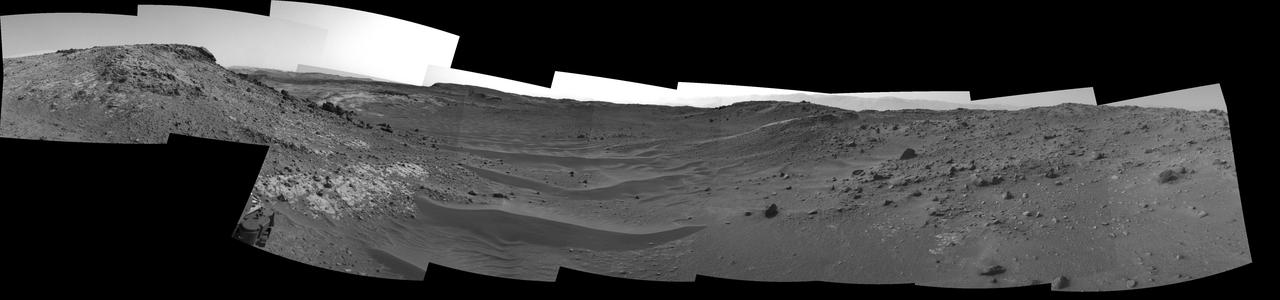
This view from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows the terrain ahead of the rover as it makes its way westward through a valley called "Artist's Drive." The Navcam recorded the component images of this mosaic on April 10, 2015, during the 951st Martian Day, or sol, of Curiosity's work on Mars. The valley is on the rover's route toward a higher site on Mount Sharp than the "Pahrump Hills" area the mission investigated at the base of the layered mountain. http://photojournal.jpl.nasa.gov/catalog/PIA19163

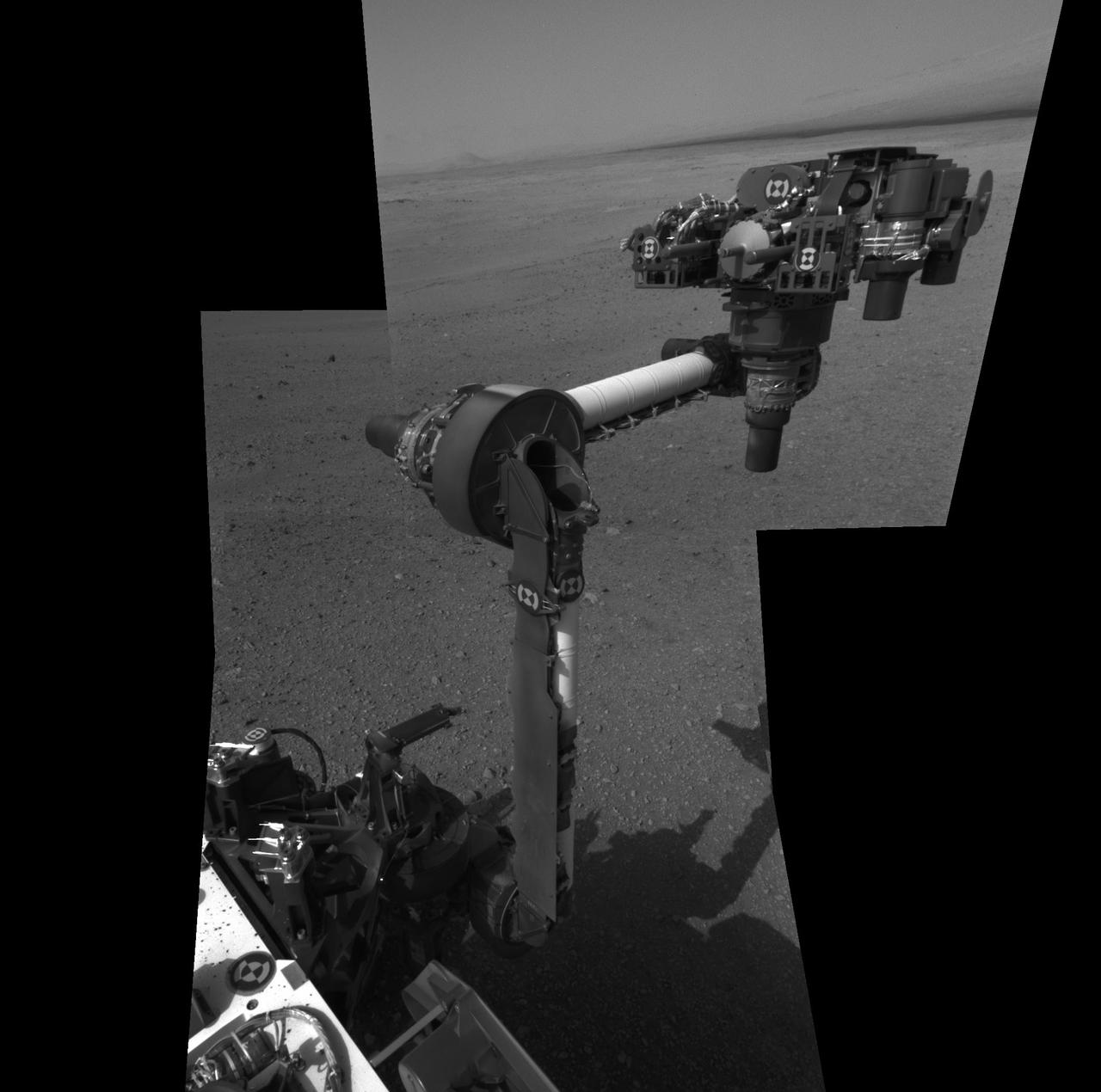
This image from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows the position in which the rover held its arm for several days after a transient short circuit triggered onboard fault-protection programming to halt arm activities on Feb. 27, 2015, the 911th Martian day, or sol, of the rover's work on Mars. The rover team chose to hold the arm in the same position for several days of tests to diagnose the underlying cause of the Sol 911 event. Observations with instruments on the rover's mast continued during this period. The Navcam took this image on March 4, 2015, during Sol 915. http://photojournal.jpl.nasa.gov/catalog/PIA19147
NASA Mars Exploration Rover Opportunity used its navigation camera Navcam to record this image of the northern end of Solander Point, a raised section of the western rim of Endeavour Crater.

This northeast-facing view from the lower edge of the pale Pahrump Hills outcrop at the base of Mount Sharp includes wind-sculpted ripples of sand and dust in the middle ground. It was taken by Curiosity Navcam on Nov. 13, 2014.
NASA Curiosity Mars rover used its Navigation Camera Navcam to capture this view partway back down a slope it climbed toward Marias Pass on lower Mount Sharp. The image was taken May 22, 2015.
This view from the left Navigation Camera Navcam of NASA Mars Rover Curiosity looks back at wheel tracks made during the first drive away from the last science target in the Glenelg area.
With the addition of four high-resolution Navigation Camera, or Navcam, images, taken on Aug. 18 Sol 12, Curiosity 360-degree landing-site panorama now includes the highest point on Mount Sharp visible from the rover.

NASA Opportunity used the navigation camera Navcam on its mast to capture this southward facing scene along the eastern flank of Solander Point during the 3,387 Martian day, or sol, of the rover work on Mars Aug. 3, 2013.
NASA Mars rover Curiosity extended its robotic arm on Aug. 20, 2012, for the first time on Mars and used its Navigation Camera Navcam to capture this view of the extended arm.

NASA Curiosity Mars rover used the Navigation Camera Navcam on its mast to catch this look-back eastward at wheel tracks from driving through and past Dingo Gap inside Gale Crater.

This mosaic of images from the Navigation Camera Navcam on NASA Mars rover Curiosity shows the scene from the rover position on the 376th Martian day, or sol, of the mission Aug. 27, 2013.
The extended robotic arm of NASA Mars rover Curiosity can be seen in this mosaic of full-resolution images from Curiosity Navigation camera Navcam. Curiosity extended its arm on Aug. 20, 2012.
NASA Curiosity Mars rover used its Navigation Camera Navcam on April 11, 2014, to record this scene of a butte called Mount Remarkable and surrounding outcrops at a waypoint called the Kimberley inside Gale Crater.
NASA Curiosity Mars rover used its Navigation Camera Navcam on April 11, 2014, to record this stereo scene of a butte called Mount Remarkable and surrounding outcrops. You need 3-D glasses to view this image.
Here is a rover eye view of driving, scooping and drilling during Curiosity first year on Mars, August 2012 through July 2013 taken by NASA Mars rover Navigation Camera Navcam.

The NASA Mars rover Curiosity used its Navigation Camera Navcam during the mission 120th Martian day, or sol Dec. 7, 2012, to record the seven images combined into this panoramic view.

NASA's Ingenuity Mars Helicopter achieves powered, controlled flight for the first time on another planet, hovering for several seconds before touching back down on April 19, 2021. The image was taken by the left Navigation Camera, or Navcam, aboard the agency's Perseverance Mars rover from a distance of 210 feet (64 meters). A short movie was also recorded and can be downloaded here as a GIF. The Ingenuity Mars Helicopter was built by JPL, which also manages this technology demonstration project for NASA Headquarters. It is supported by NASA's Science Mission Directorate, Aeronautics Research Mission Directorate, and Space Technology Mission Directorate. NASA's Ames Research Center and Langley Research Center provided significant flight performance analysis and technical assistance during Ingenuity's development. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA24586
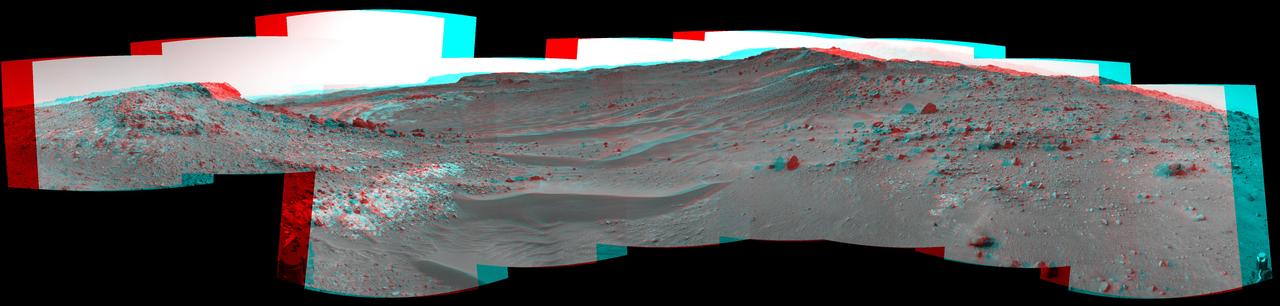
This stereo view from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows the terrain ahead of the rover as it makes its way westward through a valley called "Artist's Drive." The image appears three-dimensional when viewed through red-blue glasses with the red lens on the left. The Navcam recorded the component images of this mosaic on April 10, 2015, during the 951st Martian Day, or sol, of Curiosity's work on Mars. The valley is on the rover's route toward a higher site on Mount Sharp than the "Pahrump Hills" area the mission investigated at the base of the layered mountain. http://photojournal.jpl.nasa.gov/catalog/PIA19165

This image from the Navigation Camera Navcam on NASA Curiosity Mars rover shows two holes at top center drilled into a sandstone target called Windjana. The farther hole, with larger pile of tailings around it, is a full-depth sampling hole.
NASA Mars rover Curiosity used a mechanism on its robotic arm to dig up five scoopfuls of material from a patch of dusty sand called Rocknest, producing the five bite-mark pits visible in this image from the rover left Navigation Camera Navcam.
NASA Mars rover Opportunity captured this view southward just after completing a 338-foot 103-meter southward drive, in reverse, on Aug. 10, 2014. The foreground of this view from the rover Navcam includes the rear portion of the rover deck.
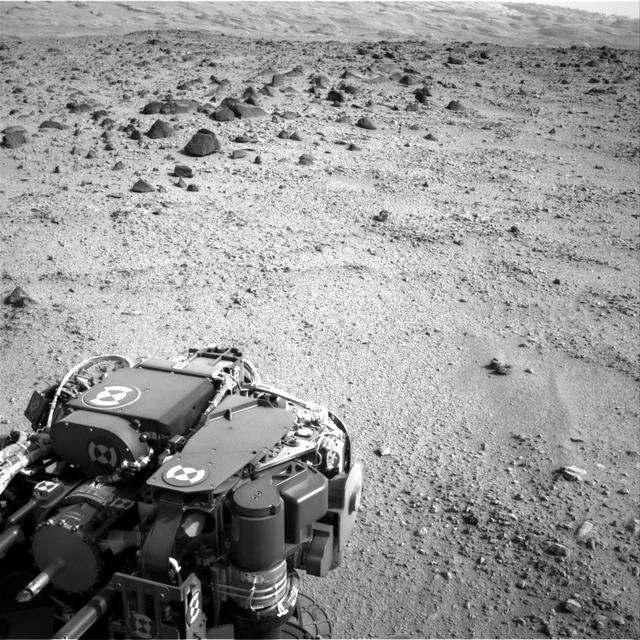
Lower slopes of Mount Sharp appear at the top of this image taken by the right Navigation Camera Navcam of NASA Mars rover Curiosity at the end of a drive of about 135 feet during the 329th Martian day, or sol, of the rover work on Mars.
This stereo view combining images taken on Feb. 10, 2014, by the Navigation Camera Navcam on NASA Curiosity Mars rover looks back to where the rover crossed a dune at Dingo Gap four days earlier. You need 3D glasses to view this image.
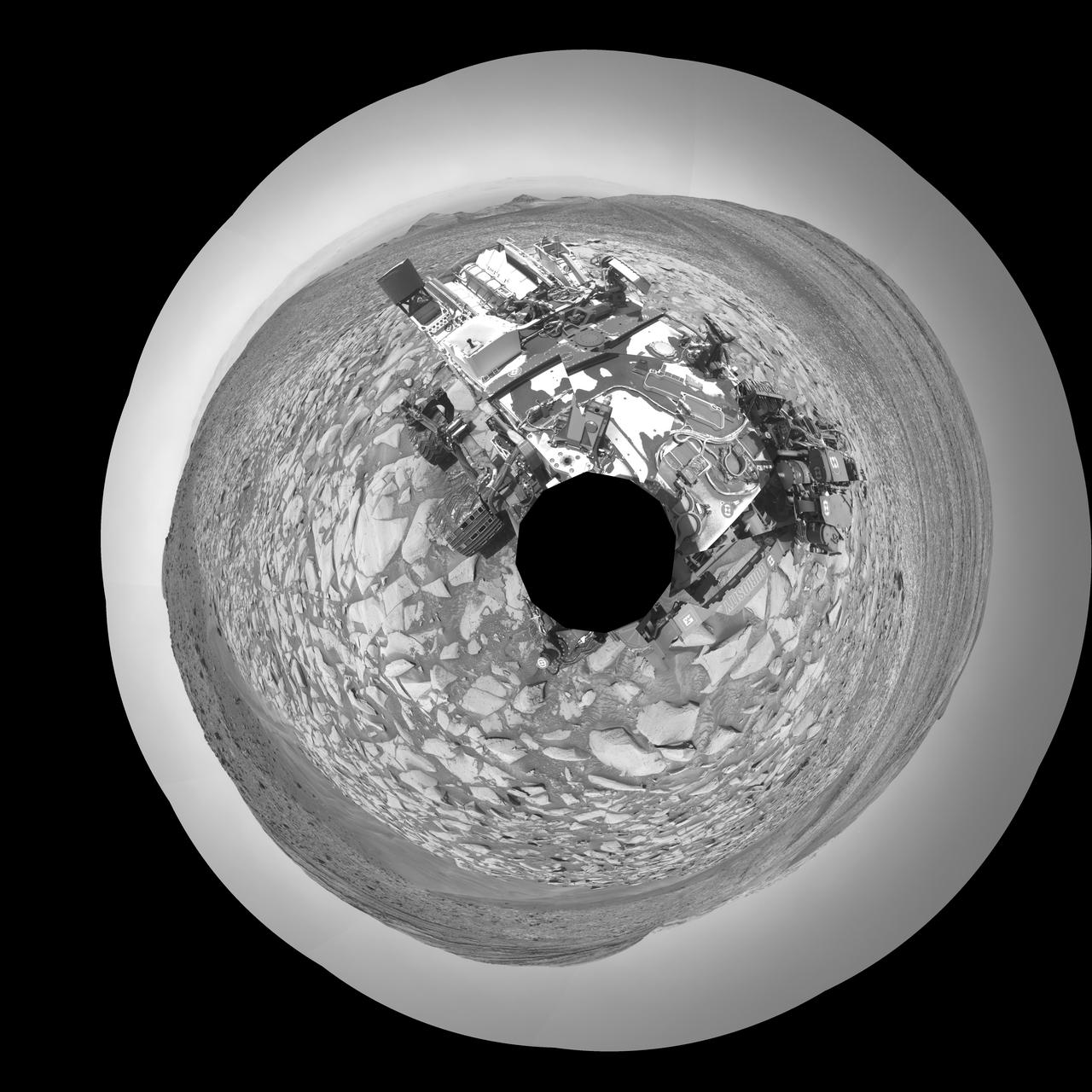
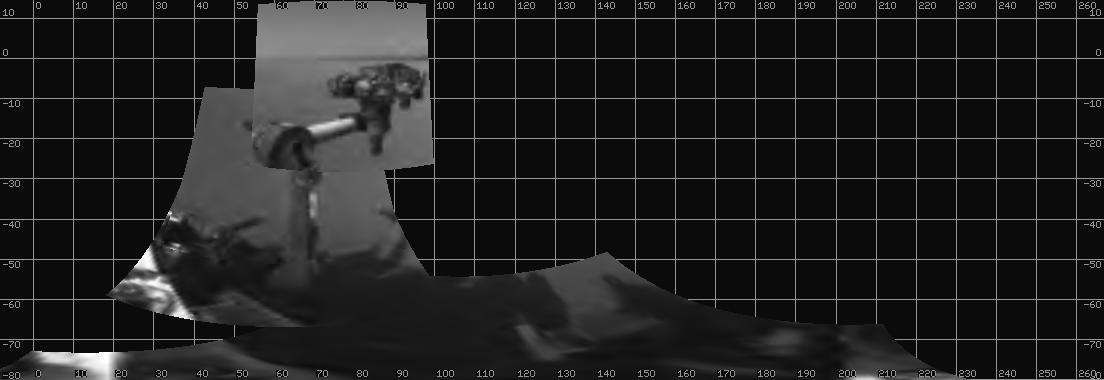
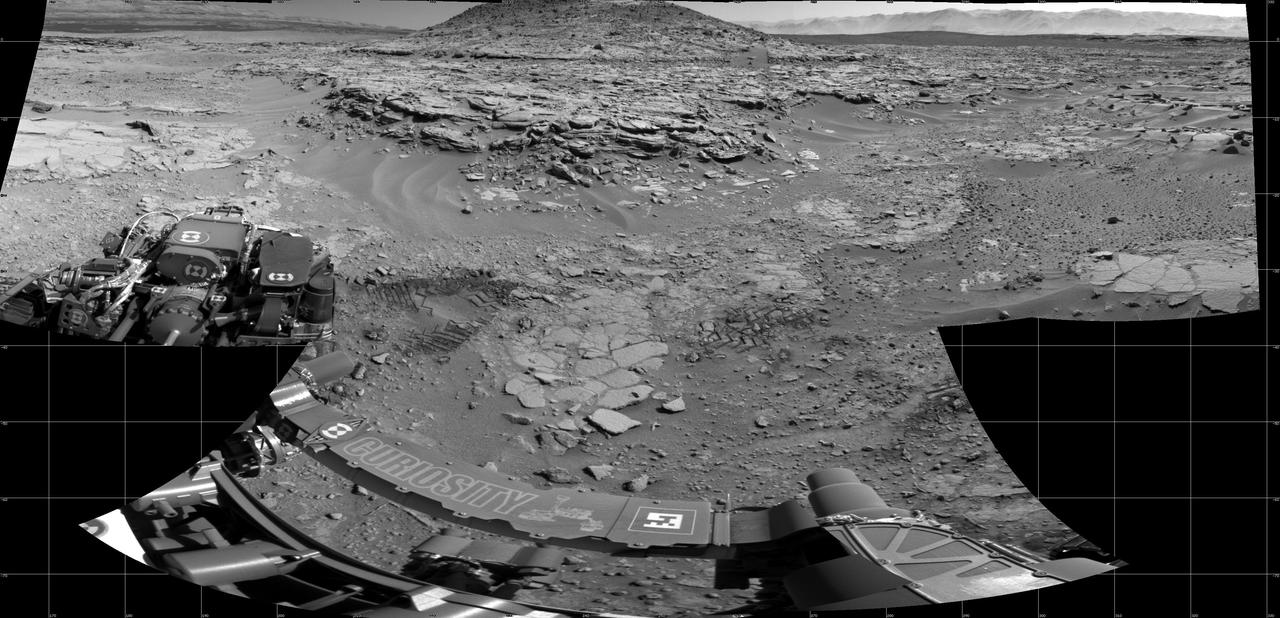
NASA's Curiosity Mars rover captured this selfie using its left black-and-white navigation camera, which is mounted on its mast, or "head," on Feb. 3, 2024, the 4,086th Martian day, or sol, of the mission. The selfie is made up of 36 individual images that were stitched together after being sent back to Earth. This warped view is different than the color selfies Curiosity has taken in the past using the camera on the end of its robotic arm, called the Mars Hand Lens Imager, or MAHLI. With its arm acting as a kind of selfie stick, Curiosity can show more of its body and surroundings. Instead, the images from the navigation camera on the mast are displayed as a polar projection; the black hole in the center is where the mast is located on the rover, an area which it can't image. https://photojournal.jpl.nasa.gov/catalog/PIA26310
NASA's Curiosity Mars rover used its Navigation Camera (Navcam) to capture this view on April 11, 2015, during the 952nd Martian day, or sol of the rover's work on Mars. The image appears three-dimensional when viewed through red-blue glasses with the red lens on the left. The rover's location was in a valley called "Artist's Drive" on the route up Mount Sharp. The view spans from east, at left, to southwest, at right. Upper Mount Sharp appears on the horizon at left. http://photojournal.jpl.nasa.gov/catalog/PIA19387

NASA's Curiosity Mars rover used its Navigation Camera (Navcam) to capture this view on April 11, 2015, during the 952nd Martian day, or sol of the rover's work on Mars. The rover's location was in a valley called "Artist's Drive" on the route up Mount Sharp. The view spans from east, at left, to southwest, at right. Upper Mount Sharp appears on the horizon at left. http://photojournal.jpl.nasa.gov/catalog/PIA19386
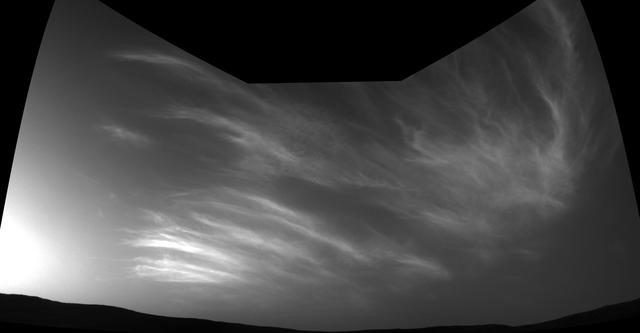
NASA's Curiosity Mars rover imaged these drifting clouds on May 17, 2019, the 2,410th Martian day, or sol, of the mission, using its black-and-white Navigation Cameras (Navcams). These are likely water-ice clouds about 19 miles (31 kilometers) above the surface. They are also "noctilucent" clouds, meaning they are so high that they are still illuminated by the Sun, even when it's night at Mars' surface. Scientists can watch when light leaves the clouds and use this information to infer their altitude. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23243

NASA's Curiosity Mars rover imaged these drifting clouds on May 7, 2019, the 2,400th Martian day, or sol, of the mission, using its black-and-white Navigation Cameras (Navcams). These are likely water-ice clouds about 19 miles (31 kilometers) above the surface. They are also "noctilucent" clouds, meaning they are so high that they are still illuminated by the Sun, even when it's night at Mars' surface. Scientists can watch when light leaves the clouds and use this information to infer their altitude. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23242

NASA's Curiosity Mars rover imaged these drifting clouds on May 12, 2019, the 2,405th Martian day, or sol, of the mission, using its black-and-white Navigation Cameras (Navcams). These are likely water-ice clouds about 19 miles (31 kilometers) above the surface. They are also "noctilucent" clouds, meaning they are so high that they are still illuminated by the Sun, even when it's night at Mars' surface. Scientists can watch when light leaves the clouds and use this information to infer their altitude. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23241

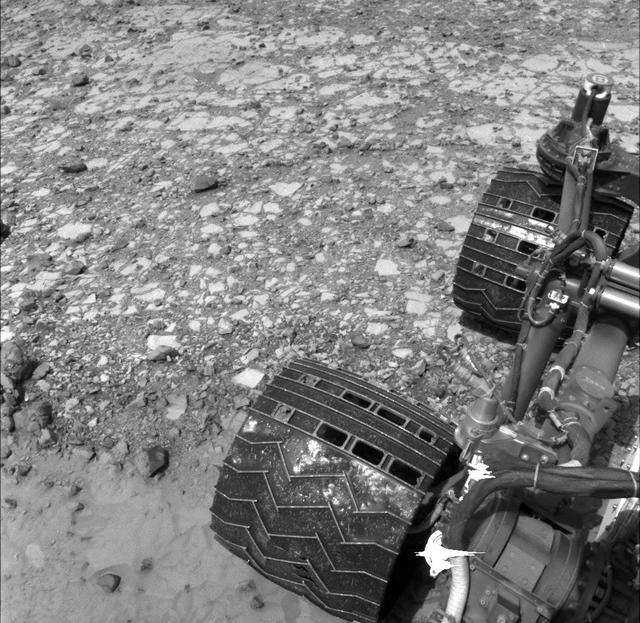
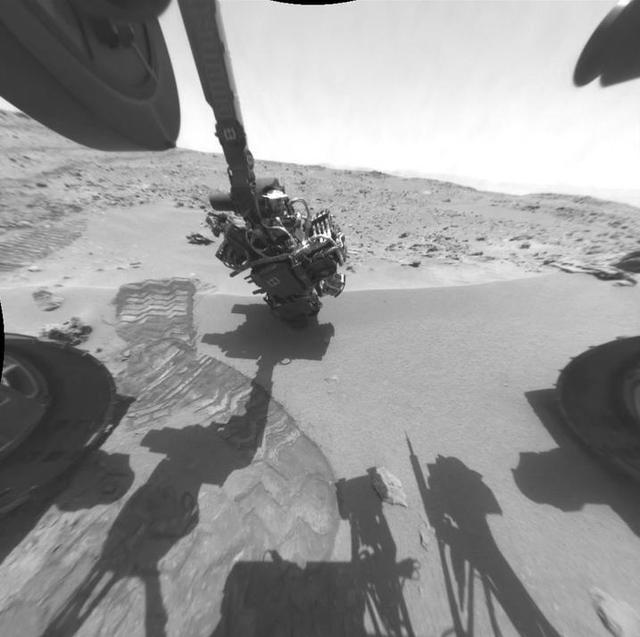
NASA's Curiosity Mars rover captured this image of its right rear wheels using its navigation cameras on June 1, the 3,846th Martian day, or sol, of the mission. The image was taken while the rover was attempting to climb a 23-degree slope covered with slippery sand and wheel-size boulders. Rover tracks from the approach to this location can be seen in the sand at the top of the image. The rover slipped in the sand, causing it to veer off its intended route and prompting its right middle wheel to drive up on to the bright, long rock seen at the left of the image. Driving over this rock was not intended, and the large movement of the suspension triggered a safety fault, stopping the drive. In response, rover planners chose to back away from this spot and try climbing the slope a few feet from here. Curiosity experienced several more faulted drives before a decision was made to pursue a detour on less difficult terrain about 492 feet (150 meters) away. https://photojournal.jpl.nasa.gov/catalog/PIA26016

This sequence of images – taken on May 22, 2021, by the navigation camera aboard NASA's Ingenuity Mars Helicopter – depicts the last 29 seconds of the rotorcraft's sixth flight. Frame rate is 3.3 frames per second until Ingenuity began its final descent to the surface, at which point it collected a frame every two seconds. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA24598
This image of Mars was taken from the height of 33 feet (10 meters) by NASA's Ingenuity Mars helicopter during its sixth flight, on May 22, 2021. https://photojournal.jpl.nasa.gov/catalog/PIA24600
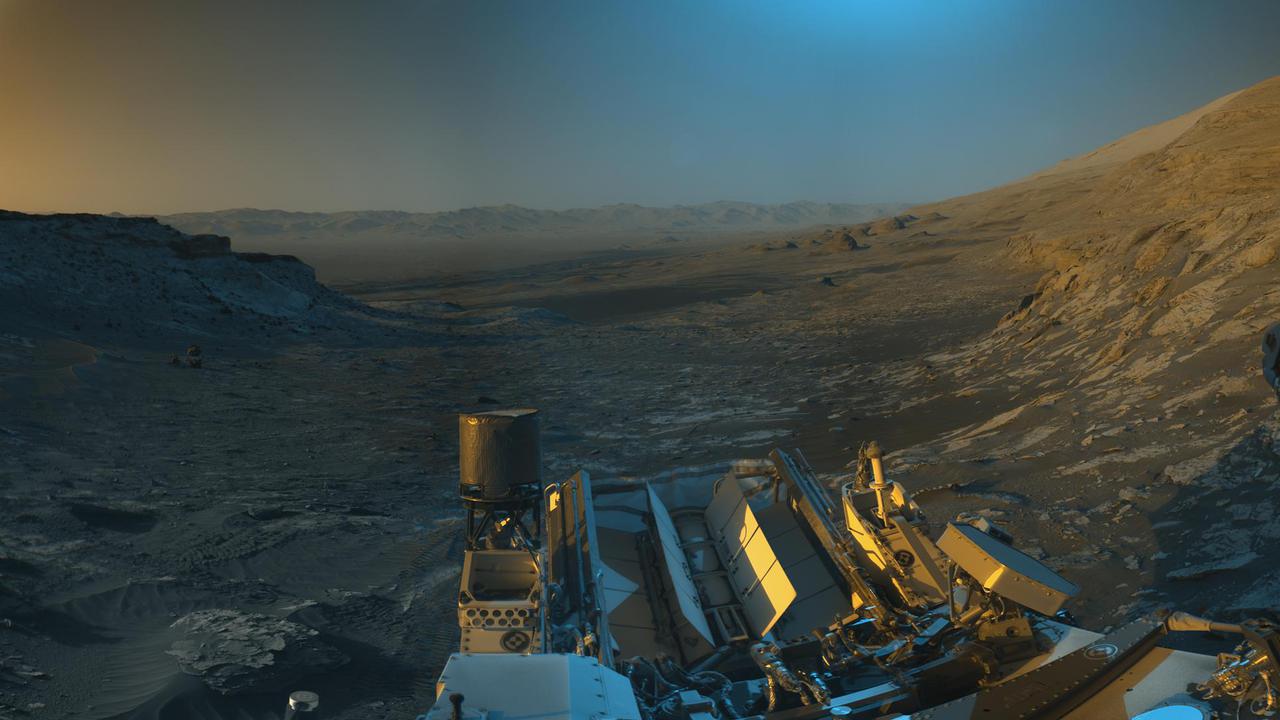
NASA's Curiosity Mars rover used its black-and-white navigation cameras to capture panoramas of this scene at two times of day. Blue, orange, and green color was added to a combination of both panoramas for an artistic interpretation of the scene. On Nov. 16, 2021 (the 3,299th Martian day, or sol, of the mission), engineers commanded Curiosity to take two sets of mosaics, or composite images, capturing the scene at 8:30 a.m. and again at 4:10 p.m. local Mars time. The two times of day provided contrasting lighting conditions that brought out a variety of unique landscape details. They combined the two scenes in an artistic re-creation that includes images from the morning scene in blue, the afternoon scene in orange, and a combination of both in green. The main image is an artistic interpretation of the scene. Figure 1 is the mosaic taken in the afternoon. Figure 2 is the mosaic taken in the morning. At the center of the image is the view back down Mount Sharp, the 3-mile-tall (5-kilometer-tall) mountain that Curiosity has been driving up since 2014. Rounded hills can be seen in the distance at center-right; Curiosity got a closer view of these back in July, when the rover started to see intriguing changes in the landscape. A field of sand ripples known as the "Sands of Forvie" stretches a quarter- to a half-mile (400 to 800 meters) away. At the far right of the panorama is the craggy "Rafael Navarro Mountain," named after a Curiosity team scientist who passed away earlier this year. Poking up behind it is the upper part of Mount Sharp, far above the area Curiosity is exploring. Mount Sharp lies inside Gale Crater, a 96-mile-wide (154-kilometer-wide) basin formed by an ancient impact; Gale Crater's distant rim stands 7,500 feet tall (2.3 kilometers), and is visible on the horizon about 18 to 25 miles away (30 to 40 kilometers). https://photojournal.jpl.nasa.gov/catalog/PIA24937
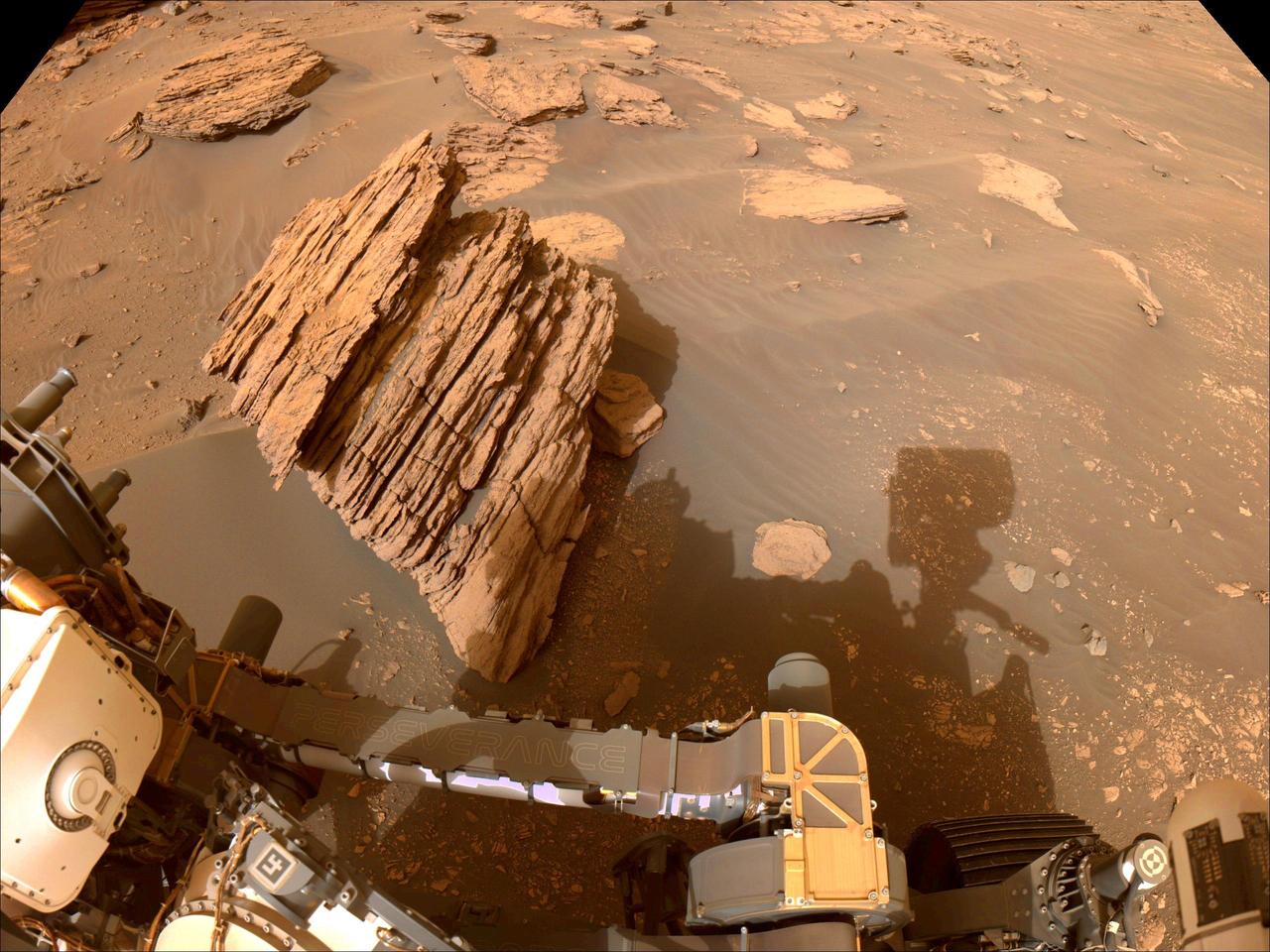
NASA's Perseverance Mars rover captured this image of "Bettys Rock" using one of the rover navigation cameras on June 20, 2022, the 474th Martian day, or sol, of the mission. The rock is named after Bettys Rock in Shenandoah National Park. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA25658
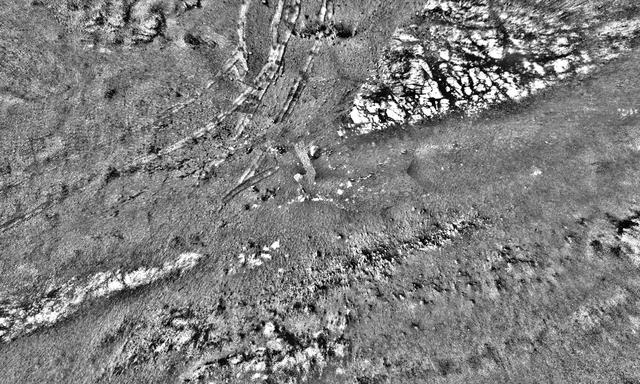
This mosaic was stitched together using images from the Navigation Camera, or Navcam, on NASA's Opportunity rover. The scene shows the rover's tracks made in Perseverance Valley between Sols 5,000 and 5,030. The mosaic has a resolution of about 1 centimeter per pixel; the scene width is 66 feet (20 meters) while the scene height is 39 feet (12 meters). The rover wheel tracks are about 3 feet (1 meter) apart. Shading differences between frames have been adjusted so subtle surface details are more visible. https://photojournal.jpl.nasa.gov/catalog/PIA23246
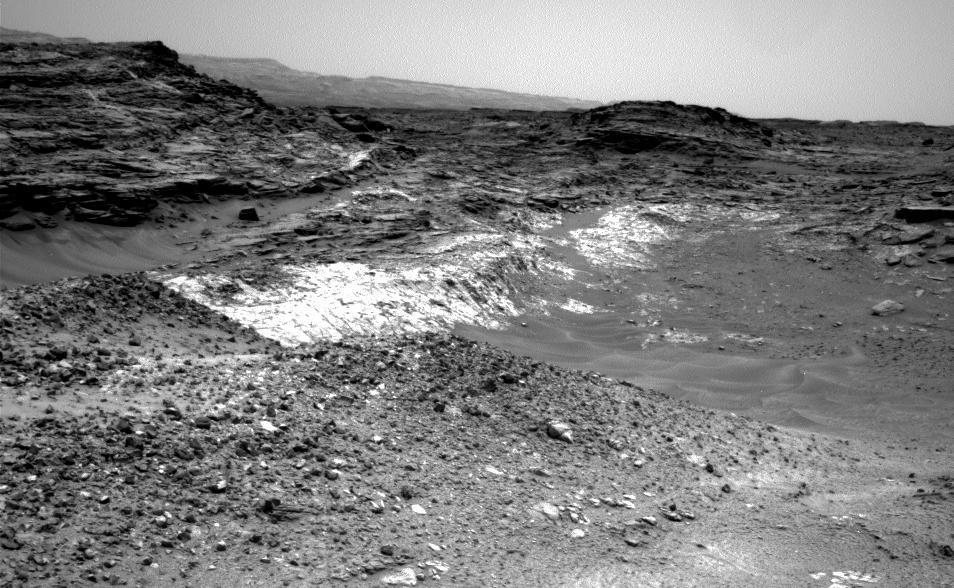
The Martian outcrop where pale rock meets darker overlying rock near the middle of this view is an example of a geological contact. Such contacts can reveal clues about how the environmental conditions that produced one type of rock were related to the conditions that produced the other. NASA's Curiosity Mars rover took this image with its Navigation Camera (Navcam) just after finishing an uphill drive of about 72 feet (22 meters) on the 991st Martian day, or sol of the rover's work on Mars (May 21, 2015). http://photojournal.jpl.nasa.gov/catalog/PIA19663
NASA's Curiosity Mars rover used its Navigation Camera (Navcam) to capture this scene toward the west just after completing a drive that took the mission's total driving distance past 10 kilometers (6.214 miles). The drive on April 16, 2015, during the 957th Martian day, or sol of Curiosity's work on Mars covered 208 feet (63.5 meters). It advanced the rover westward through a sandy-floored valley. The valley is on the rover's route toward a higher site on Mount Sharp than sites it has investigated previously. http://photojournal.jpl.nasa.gov/catalog/PIA19391
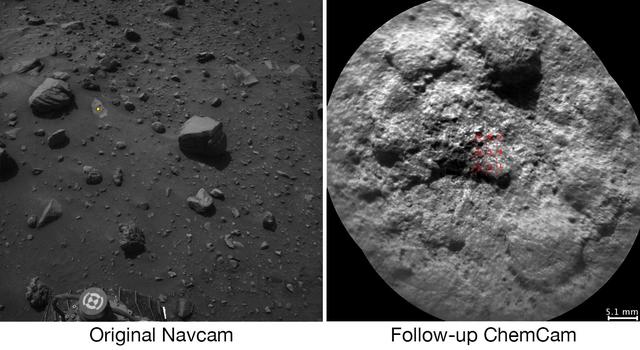
NASA's Curiosity Mars rover autonomously selects some of the targets for the laser and telescopic camera of the rover's Chemistry and Camera (ChemCam) instrument. For example, on-board software analyzed the image on the left, chose the target highlighted with the yellow dot, and pointed ChemCam to acquire laser analysis and the image on the right. Most ChemCam targets are still selected by scientists discussing rocks or soil seen in images the rover has sent to Earth, but the autonomous targeting provides an added capability. It can offer a head start on acquiring composition information at a location just reached by a drive. The software for target selection and instrument pointing is called AEGIS, for Autonomous Exploration for Gathering Increased Science. The image on the left was taken by the left eye of Curiosity's stereo Navigation Camera (Navcam) a few minutes after the rover completed a drive of about 43 feet (13 meters) on July 14, 2016, during the 1,400th Martian day, or sol, of the rover's work on Mars. Using AEGIS for target selection and pointing based on the Navcam imagery, Curiosity's ChemCam zapped a grid of nine points on a rock chosen for meeting criteria set by the science team. In this run, parameters were set to find bright-toned outcrop rock rather than darker rocks, which in this area tend to be loose on the surface. Within less than 30 minutes after the Navcam image was taken, ChemCam had used its laser on all nine points and had taken before-and-after images of the target area with its remote micro-imager (RMI) camera. The image at right combines those two RMI exposures. The nine laser targets are marked in red at the center. On the Navcam image at left, the yellow dot identifies the selected target area, which is about 2.2 inches (5.6 centimeters) in diameter. An unannotated version of this Sol 1400 Navcam image is available. ChemCam records spectra of glowing plasma generated when the laser hits a target point. These spectra provide information about the chemical elements present in the target. The light-toned patch of bedrock identified by AEGIS on Sol 1400 appears, geochemically, to belong to the "Stimson" sandstone unit of lower Mount Sharp. In mid-2016, Curiosity typically uses AEGIS for selecting a ChemCam target more than once per week. http://photojournal.jpl.nasa.gov/catalog/PIA20762
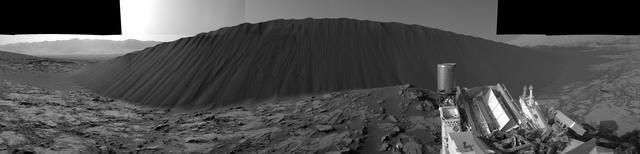
The left side of this 360-degree panorama from NASA's Curiosity Mars rover shows the long rows of ripples on a linear shaped dune in the Bagnold Dune Field on the northwestern flank of Mount Sharp. The view is a mosaic of images taken with Curiosity's Navigation Camera (Navcam) on Feb. 5, 2017, during the 1,601st Martian day, or sol, of the rover's work on Mars. The view is centered toward west-southwest, with east-southeast on either end. A capped mound called "Ireson Hill" is on the right. http://photojournal.jpl.nasa.gov/catalog/PIA21268

NASA's Ingenuity Mars Helicopter used its black-and-white navigation camera to capture this video showing the shadows of its rotor blades turning on Feb. 11, 2024. Engineers planned the video to get more information about damage that was sustained by the rotor blades after a rough landing occurred during the helicopter's 72nd flight on Jan. 18, 2024. This video shows that Ingenuity's upper rotor, the first rotor seen in this video, has a rotor blade missing. The blade appears to have separated near the mast. Video available at https://photojournal.jpl.nasa.gov/catalog/PIA26244
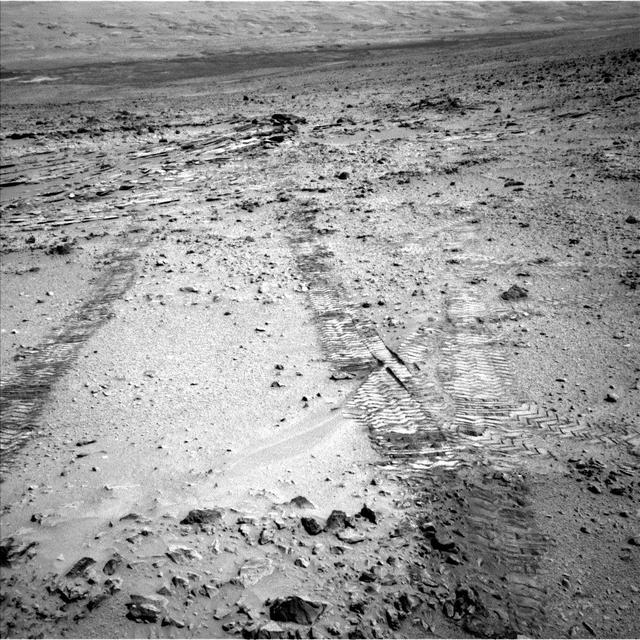
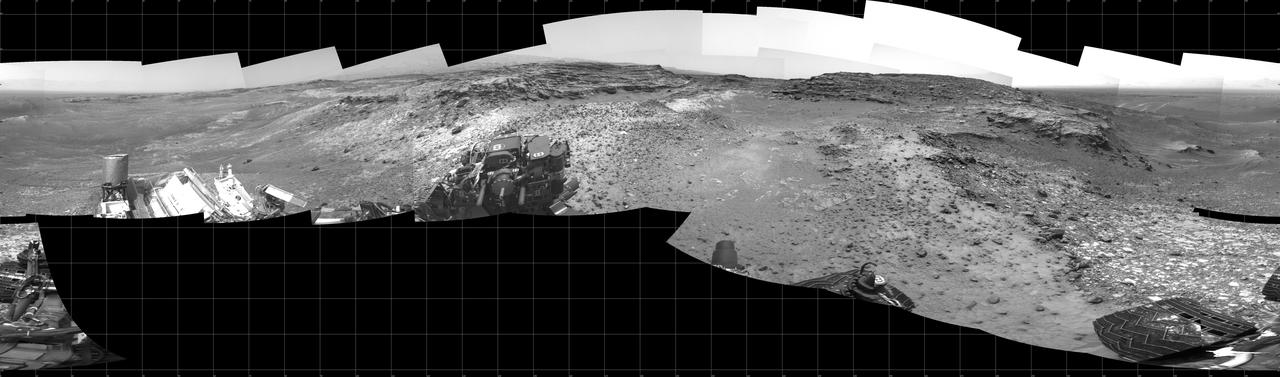
NASA's Curiosity Mars rover left several sets of tracks where the rover experienced a fault, or unexpected stoppage mid-drive, while climbing a particularly difficult slope. The bright rock seen directly above the rover's wheel is what caused the rover to fault. Tracks can be seen above the wheel at right, indicating where Curiosity backed up and repositioned to try again. The rover's navigation cameras captured this panorama on June 8, 2023, the 3,853rd Martian day, or sol, of the mission. https://photojournal.jpl.nasa.gov/catalog/PIA26015
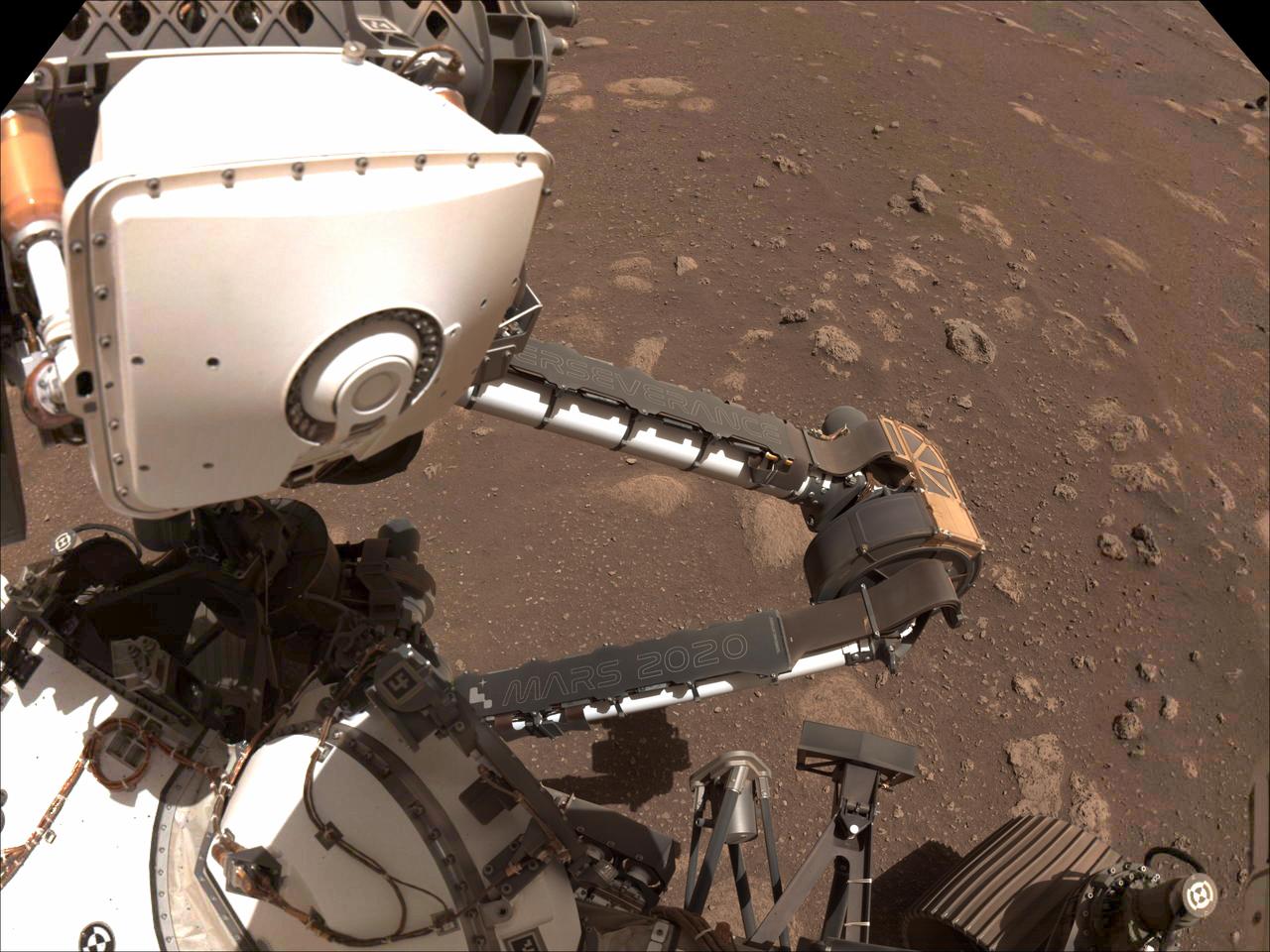
Two name plates mounted on the Mars Perseverance rover's robotic arm are visible in this composite image, made from photos taken by the rover's left Navcam on Sol 12 of its mission (March 2, 2021). The rover's name, "Perseverance," is inscribed on the plate attached to its forearm, and the mission name, "Mars 2020," is shown on its upper arm. Running vertically along the right side of the mission name plate is a string of 17 letters and numbers. These characters form a unique product identification number (PIN) similar to the Vehicle Identification Number (VIN) on vehicles on Earth, but signifying that this is an off-road vehicle. Issued in part by the Society of Automotive Engineers, a PIN or VIN number provides a unique vehicle identifier, while encoding information about the vehicle's characteristics and manufacture. Perseverance's PIN can be decoded to reveal clues about its destination, mission objective and power source. https://photojournal.jpl.nasa.gov/catalog/PIA24467

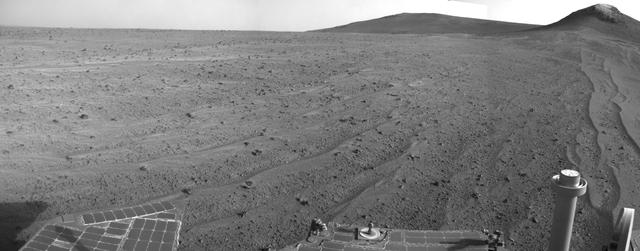
"Perseverance Valley" lies just on the other side of the dip in the crater rim visible in the left half of this 360-degree panorama from the Navigation Camera (Navcam) on NASA's Mars Exploration Rover Opportunity. As the rover arrived at this area in early May 2017, researchers began looking for clues about what process carved the valley. The rover team plans to drive Opportunity all the way down the valley into the interior of Endeavour Crater. The foreground and the area to the right are on the plain just outside of Endeavour Crater. The high point near the center of the image is called "Winnemucca," part of an Endeavour rim segment called "Cape Byron." Endeavour's interior and distant eastern rim are visible at upper left, above the notched portion of the western rim that sits directly above Perseverance Valley. The rover's Navcam took the component images of this scene on May 2 and May 3, 2017, during the 4,718th and 4,719th Martian days, or sols, of Opportunity's work on Mars, two days before a drive that brought Opportunity to the head of the valley. https://photojournal.jpl.nasa.gov/catalog/PIA21495
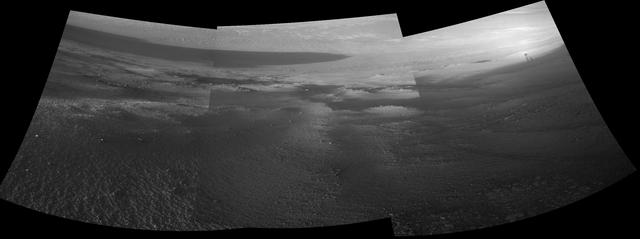
Late-afternoon shadows include one cast by the rover itself in this look toward the floor of Endeavour Crater by NASA's Mars Exploration Rover Opportunity. The rover recorded this scene on Nov. 11, 2017, during the 4,911th Martian day, or sol, of the rover's work on Mars. That was about a week before Opportunity's eighth Martian winter solstice. Opportunity's location is partway down a narrow valley that descends from the crest of the western rim of Endeavour Crater to the crater's floor. This fluid-carved set of troughs, called "Perseverance Valley," is the length of about two football fields, at a slope of about 15 to 17 degrees. The Navigation Camera (Navcam) on Opportunity's mast took the three component images stitched together into this scene. The images were taken about three minutes apart, long enough to see how the shadow was changing on the slope, at the seams between the images. Wheel tracks in the lower right of the scene were made before the rover climbed back uphill for a closer look at some rocks it had passed. The portions of the rover in the shadow at upper right include the mast with the Navcam and Panoramic Camera (Pancam) on top and the UHF radio antenna, which Opportunity uses to transmit images and other data to overflying orbiters for relay to Earth. https://photojournal.jpl.nasa.gov/catalog/PIA22071

This image of the floor of Jezero Crater was taken by one of the Navcam imagers aboard NASA's Perseverance Mars rover on Feb. 5, 2023, the 698th Martian day, or sol, of the mission. The rover's tracks can be seen disappearing into the distance. The flat-topped hill that the science team refers to as "Kodiak," a remnant of Jezero Crater's river delta, is in the upper right of image, about 0.6 miles (1 kilometer) away. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA25684

This series of images shows the shadow of Phobos as it sweeps over NASA's Curiosity Mars rover and darkens the sunlight on Monday, March 25, 2019 (the 2,358th sol, or Martian day, of the mission). This image was taken by one of Curiosity's Navigation Cameras (Navcams). The sequence has been contrast-enhanced and sped up by a factor of four. The image was taken after the Sun had descended behind the horizon, just as Phobos was rising and throwing its elongated shadow across the Martian surface. Dust particles in the atmosphere acted as a screen against which the shadow was projected. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23135

This view from NASA's Curiosity Mars rover shows an example of discoloration closely linked to fractures in the Stimson formation sandstone on lower Mount Sharp. The pattern is evident along two perpendicular fractures. Curiosity's Navigation Camera (Navcam) acquired the component images of this mosaic on Aug. 23, 2015, during the 1.083rd Martian day, or sol, of the mission. The location is along the rover's path between "Marias Pass" and "Bridger Basin." In this region, the rover has found fracture zones to be associated with rock compositions enriched in silica, relative to surrounding bedrock. http://photojournal.jpl.nasa.gov/catalog/PIA20268
This 360-degree panorama shows the "Marias Pass" area, at center, and part of the slope that NASA's Curiosity Mars rover climbed to get there, at right. The scene combines multiple images taken by Curiosity's Navigation Camera (Navcam) on May 22, 2105, during the 992nd Martian day, or sol, of the rover's work on Mars. North is at both ends; south is in the middle. On the previous sol, Curiosity reached this location by climbing a slope with steepness of up to 20 degrees. From this location, the rover's Chemistry and Camera (ChemCam) instrument examined a rock target called "Elk" and found its composition to be about 80 percent silica. http://photojournal.jpl.nasa.gov/catalog/PIA20266
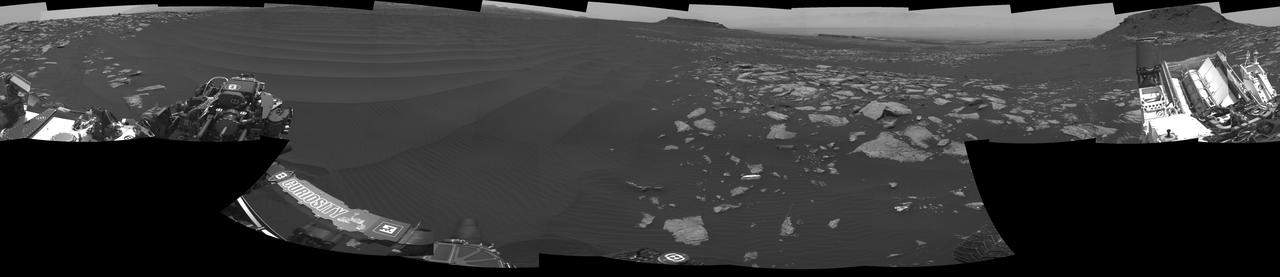
This 360-degree panorama from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows the surroundings of a site on lower Mount Sharp where the rover spent its 1,000th Martian day, or sol, on Mars. Sol 1,000 of Curiosity's Mars-surface mission corresponded to May 30, 2015. The component images for this scene were taken on Sol 997 (May 27, 2015). The site is a valley just below "Marias Pass" on lower Mount Sharp. A map of the area is at http://mars.nasa.gov/msl/images/Curiosity_Location_Sol997-full.jpg. Tracks from the rover's drive to this site are visible at right. The rover team chose this location near Marias Pass because images from orbit showed what appeared to be a contact between two types of bedrock. The two types are evident in this panorama. The bedrock close to the rover is pale mudstone similar to what Curiosity examined in 2014 and early 2015 at "Pahrump Hills." The darker, finely bedded bedrock above it is sandstone that the rover team calls the "Stimson" unit. The largest-looking slab of Stimson sandstone in the image, in the lower left quadrant, is a target called "Ronan," selected for close-up inspection. http://photojournal.jpl.nasa.gov/catalog/PIA19679

NASA's Ingenuity Mars Helicopter can be seen hovering during its third flight on April 25, 2021, as seen by the left Navigation Camera aboard NASA's Perseverance Mars rover. https://photojournal.jpl.nasa.gov/catalog/PIA24624
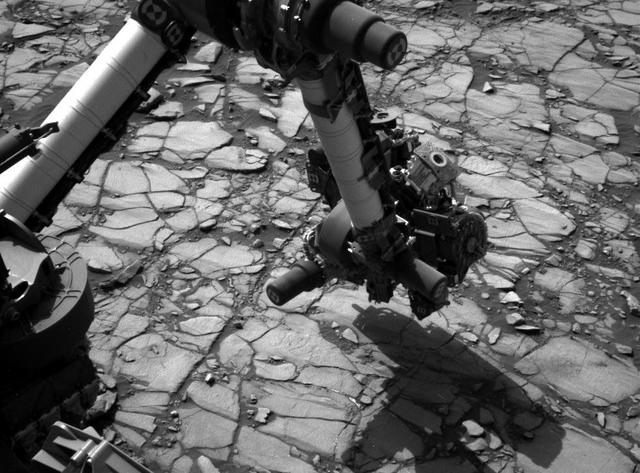
NASA's Curiosity Mars rover began close-up investigation of a target called "Marimba," on lower Mount Sharp, during the week preceding the fourth anniversary of the mission's dramatic sky-crane landing. The Navigation Camera (Navcam) on Curiosity's mast took this image on Aug. 2, 2016, during the 1,418th Martian day, or sol, since Curiosity landed inside Gale Crater on Aug. 6, 2012, Universal Time (Aug. 5, PDT). In this scene, the rover has extended its arm over a patch of bedrock selected as the target for rover's next drilling operation. The drilling collects rock powder for onboard laboratory analysis. The arm is positioned with the rover's wire-bristle Dust Removal Tool above the target. http://photojournal.jpl.nasa.gov/catalog/PIA20764
This stereo view from NASA's Curiosity Mars Rover shows the downwind side of "Namib Dune," which stands about 13 feet (4 meters) high. The image appears three-dimensional when viewed through red-blue glasses with the red lens on the left. The site is part of Bagnold Dunes, a band of dark sand dunes along the northwestern flank of Mars' Mount Sharp. The component images stitched together into this scene were taken with Curiosity's Navigation Camera (Navcam) on Dec. 17, 2015, during the 1,196th Martian day, or sol, of the rover's work on Mars. In late 2015 and early 2016, Curiosity is conducting the first up-close studies ever made of active sand dunes anywhere but on Earth. Under the influence of Martian wind, the Bagnold Dunes are migrating up to about one yard or meter per Earth year. http://photojournal.jpl.nasa.gov/catalog/PIA20282
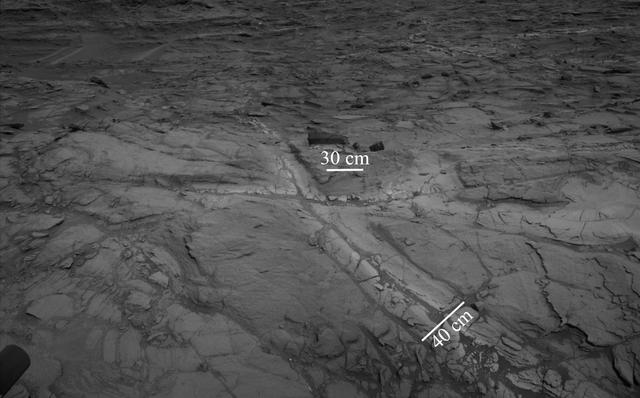
Pale zones called "halos" border bedrock fractures visible in this 2015 image from NASA's Curiosity Mars rover which has been darkened (a previously released image can be seen at PIA20268). Measurements overlaid on the image offer a sense of scale for the size of these fractures. The rover team determined that the halos are rich in silica, a clue to the duration of wet environmental conditions long ago. The location is on the lower slope of Mars' Mount Sharp. Curiosity's Navigation Camera (Navcam) acquired the component images of this mosaic on Aug. 23, 2015, during the 1.083rd Martian day, or sol, of the mission. The location is along the rover's path between "Marias Pass" and "Bridger Basin." In this region, the rover has found fracture zones to be associated with rock compositions enriched in silica, relative to surrounding bedrock. https://photojournal.jpl.nasa.gov/catalog/PIA21649
This view from NASA's Curiosity Mars Rover shows the downwind side of "Namib Dune," which stands about 13 feet (4 meters) high. The site is part of Bagnold Dunes, a band of dark sand dunes along the northwestern flank of Mars' Mount Sharp. The component images stitched together into this scene were taken with Curiosity's Navigation Camera (Navcam) on Dec. 17, 2015, during the 1,196th Martian day, or sol, of the rover's work on Mars. In late 2015 and early 2016, Curiosity is conducting the first up-close studies ever made of active sand dunes anywhere but on Earth. Under the influence of Martian wind, the Bagnold Dunes are migrating up to about one yard or meter per Earth year. The view spans from westward on the left to east-southeastward on the right. It is presented as a cylindrical perspective projection. http://photojournal.jpl.nasa.gov/catalog/PIA20281
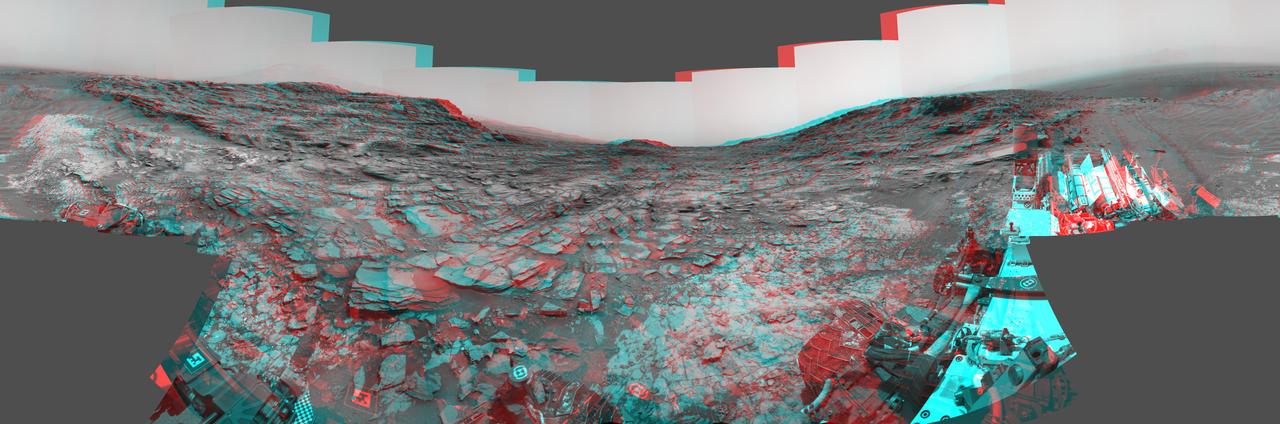
This stereo view from the Navigation Camera (Navcam) on NASA's Curiosity Mars rover shows a 360-degree panorama around the location where the rover spent its 1,000th Martian day, or sol, on Mars. The image appears three-dimensional when viewed through red-blue glasses with the red lens on the left. Sol 1,000 of Curiosity's Mars-surface mission corresponded to May 30, 2015. The component images for this scene were taken on Sol 997 (May 27, 2015). The site is a valley just below "Marias Pass" on lower Mount Sharp. A map of the area is at http://mars.nasa.gov/msl/images/Curiosity_Location_Sol997-full.jpg. The center of the scene is toward the south, with north at both ends. This stereo view combines images from Navcam left-eye and right-eye cameras. A single-eye version of the scene is at PIA19679 . Tracks from the rover's drive to this site are visible at right. The rover team chose this location near Marias Pass because images from orbit showed what appeared to be a contact between two types of bedrock. The two types are evident in this panorama. The bedrock close to the rover is pale mudstone similar to what Curiosity examined in 2014 and early 2015 at "Pahrump Hills." The darker, finely bedded bedrock above it is sandstone that the rover team calls the "Stimson" unit. The largest-looking slab of Stimson sandstone in the image, in the lower left quadrant, is a target called "Ronan," selected for close-up inspection. on lower Mount Sharp. http://photojournal.jpl.nasa.gov/catalog/PIA19678
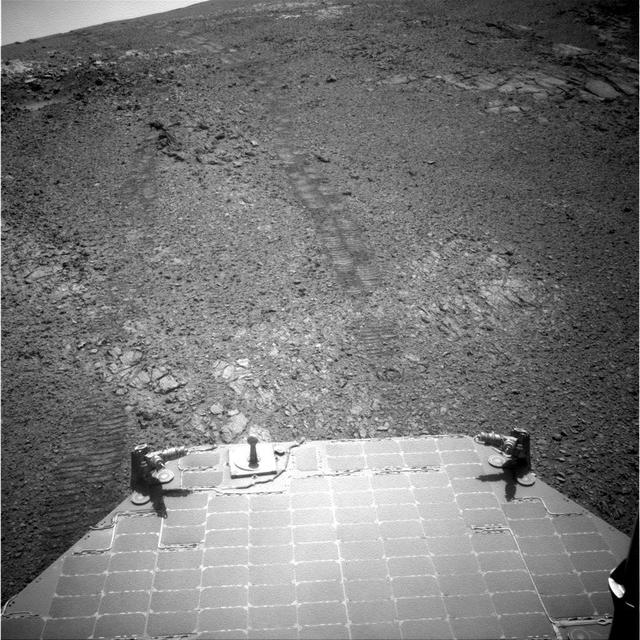
This image from the navigation camera (Navcam) on the mast of NASA's Mars Exploration Rover Opportunity provides a look back to the crest of Endeavour Crater's rim after the rover began descending "Perseverance Valley" on the rim's inner slope. The Navcam took this image on July 18, 2017, during the 4,793rd Martian day, or sol, of Opportunity's work on Mars. Wheel tracks from the top of the rim to the rover are visible above the rear solar panel of the vehicle. For scale, the distance between tracks from right-side wheels and tracks from left-side wheels is about 3.3 feet (1 meter). The knob-topped cylinder mounted at the edge of the solar panel is the calibration target for Opportunity's panoramic camera (Pancam). Opportunity's location on Sol 4793 was a site within the upper end of Perseverance Valley that the rover reached with a drive of about 45 feet (13.8 meters) on July 7 (Sol 4782). The rover team chose this location for Opportunity to spend about three weeks during a driving moratorium for the Mars solar conjunction period. Mars solar conjunction occurs once about every 26 months when Mars passes nearly behind the sun, from Earth's perspective. The relative positions of the three bodies makes radio transmission of commands from Earth to Mars unreliable. One advantage of this chosen location for Opportunity is a slight northward tilt for the solar panels, which adds to their power output during these weeks of southern-hemisphere autumn when daily sunshine is diminishing. https://photojournal.jpl.nasa.gov/catalog/PIA21725

This video combines two perspectives of the 59th flight of NASA's Ingenuity Mars Helicopter. The frame on the left shows video from NASA's Perseverance Mars rover; the frame on the right is footage taken by Ingenuity's downward-pointing black-and-white Navigation Camera, or Navcam, with the helicopter's shadow visible on the Martian surface. The 142-second flight, which took place on Sept 16, 2023, was intended to check Martian wind patterns. The rotorcraft hovered at different altitudes: 13 feet (4 meters), 26 feet (8 meters), 39 feet (12 meters), 52 feet (16 meters), and 66 feet (20 meters). The highest altitude achieved in this flight was at that time a record for Ingenuity. The helicopter also demonstrated during Flight 59 that it could land at speeds 25% slower than originally designed. The video clip from Perseverance was captured by the rover's Mastcam-Z imager from about 180 feet (55 meters) away. Shown here is an enhanced-color view that exaggerates subtle color differences in the scene to show more detail. The inset video shows black-and-white imagery taken by Ingenuity's downward-pointing Navigation Camera (Navcam) during the flight. The video ends shortly after the helicopter's final hover at 13 feet (4 meters) as it begins its final descent to the surface. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Movies available at https://photojournal.jpl.nasa.gov/catalog/PIA26078
Wispy clouds float across the Martian sky in this accelerated sequence of images from NASA's Curiosity Mars rover. The rover's Navigation Camera (Navcam) took these eight images over a span of four minutes early in the morning of the mission's 1,758th Martian day, or sol (July 17, 2017), aiming nearly straight overhead. This sequence uses raw images, which include a bright ring around the center of the frame that is an artifact of sunlight striking the camera lens even though the Sun is not in the shot. A processed version removing that artifact and emphasizing changes between images is also available. The clouds resemble Earth's cirrus clouds, which are ice crystals at high altitudes. These Martian clouds are likely composed of crystals of water ice that condense onto dust grains in the cold Martian atmosphere. Cirrus wisps appear as ice crystals fall and evaporate in patterns known as "fall streaks" or "mare's tails." Such patterns have been seen before at high latitudes on Mars, for instance by the Phoenix Mars Lander in 2008, and seasonally nearer the equator, for instance by the Opportunity rover. However, Curiosity has not previously observed such clouds so clearly visible from the rover's study area about five degrees south of the equator. The Hubble Space Telescope and spacecraft orbiting Mars have observed a band of clouds to appear near the Martian equator around the time of the Martian year when the planet is farthest from the Sun. With a more elliptical orbit than Earth's, Mars experiences more annual variation than Earth in its distance from the Sun. The most distant point in an orbit around the Sun is called the aphelion. The near-equatorial Martian cloud pattern observed at that time of year is called the "aphelion cloud belt." These new images from Curiosity were taken about two months before aphelion, but the morning clouds observed may be an early stage of the aphelion cloud belt. An animation is available at https://photojournal.jpl.nasa.gov/catalog/PIA21842

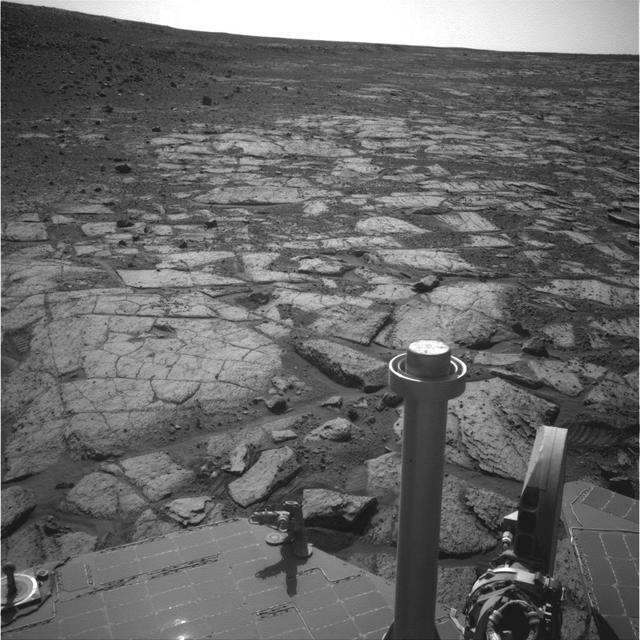
This view of Curiosity's left-front and left-center wheels and of marks made by wheels on the ground in the "Yellowknife Bay" area comes from one of six cameras used on Mars for the first time more than six months after the rover landed. The left Navigation Camera (Navcam) linked to Curiosity's B-side computer took this image during the 223rd Martian day, or sol, of Curiosity's work on Mars (March 22, 2013). The wheels are 20 inches (50 centimeters) in diameter. Curiosity carries a pair of main computers, redundant to each other, in order to have a backup available if one fails. Each of the computers, A-side and B-side, also has other redundant subsystems linked to just that computer. Curiosity operated on its A-side from before the August 2012 landing until Feb. 28, when engineers commanded a switch to the B-side in response to a memory glitch on the A-side. One set of activities after switching to the B-side computer has been to check the six engineering cameras that are hard-linked to that computer. The rover's science instruments, including five science cameras, can each be operated by either the A-side or B-side computer, whichever is active. However, each of Curiosity's 12 engineering cameras is linked to just one of the computers. The engineering cameras are the Navigation Camera (Navcam), the Front Hazard-Avoidance Camera (Front Hazcam) and Rear Hazard-Avoidance Camera (Rear Hazcam). Each of those three named cameras has four cameras as part of it: two stereo pairs of cameras, with one pair linked to each computer. Only the pairs linked to the active computer can be used, and the A-side computer was active from before landing, in August, until Feb. 28. All six of the B-side engineering cameras have been used during March 2013 and checked out OK. Image Credit: NASA/JPL-Caltech <b><a href="http://www.nasa.gov/audience/formedia/features/MP_Photo_Guidelines.html" rel="nofollow">NASA image use policy.</a></b> <b><a href="http://www.nasa.gov/centers/goddard/home/index.html" rel="nofollow">NASA Goddard Space Flight Center</a></b> enables NASA’s mission through four scientific endeavors: Earth Science, Heliophysics, Solar System Exploration, and Astrophysics. Goddard plays a leading role in NASA’s accomplishments by contributing compelling scientific knowledge to advance the Agency’s mission. <b>Follow us on <a href="http://twitter.com/NASA_GoddardPix" rel="nofollow">Twitter</a></b> <b>Like us on <a href="http://www.facebook.com/pages/Greenbelt-MD/NASA-Goddard/395013845897?ref=tsd" rel="nofollow">Facebook</a></b> <b>Find us on <a href="http://instagram.com/nasagoddard?vm=grid" rel="nofollow">Instagram</a></b>
Textured rows on the ground in this portion of "Perseverance Valley" are under investigation by NASA's Mars Exploration Rover Opportunity, which used its Navigation Camera (Navcam) to take the component images of this downhill-looking scene. The rover took this image on Jan. 4, 2018, during the 4,958th Martian day, or sol, of its work on Mars, looking downhill from a position about one-third of the way down the valley. Perseverance Valley descends the inboard slope of the western rim of Endeavour Crater. A view on the same sol with the rover's front Hazard Avoidance Camera includes ground even closer to the rover at this site. Opportunity was still working close by as it reached the mission's Sol 5,000 (Feb. 16, 2018). In the portion of the valley seen here, soil and gravel have been shaped into a striped pattern in the foreground and partially bury outcrops visible in the midfield. The long dimensions of the stripes are approximately aligned with the downhill direction. The striped pattern resembles a type of feature on Earth (such as on Hawaii's Mauna Kea) that is caused by repeated cycles of freezing and thawing, though other possible origins are also under consideration for the pattern in Perseverance Valley. The view is spans from north on the left to east-southeast on the right. For scale, the foreground rock clump in the lower right is about 11 inches (28 centimeters) in width. https://photojournal.jpl.nasa.gov/catalog/PIA22217

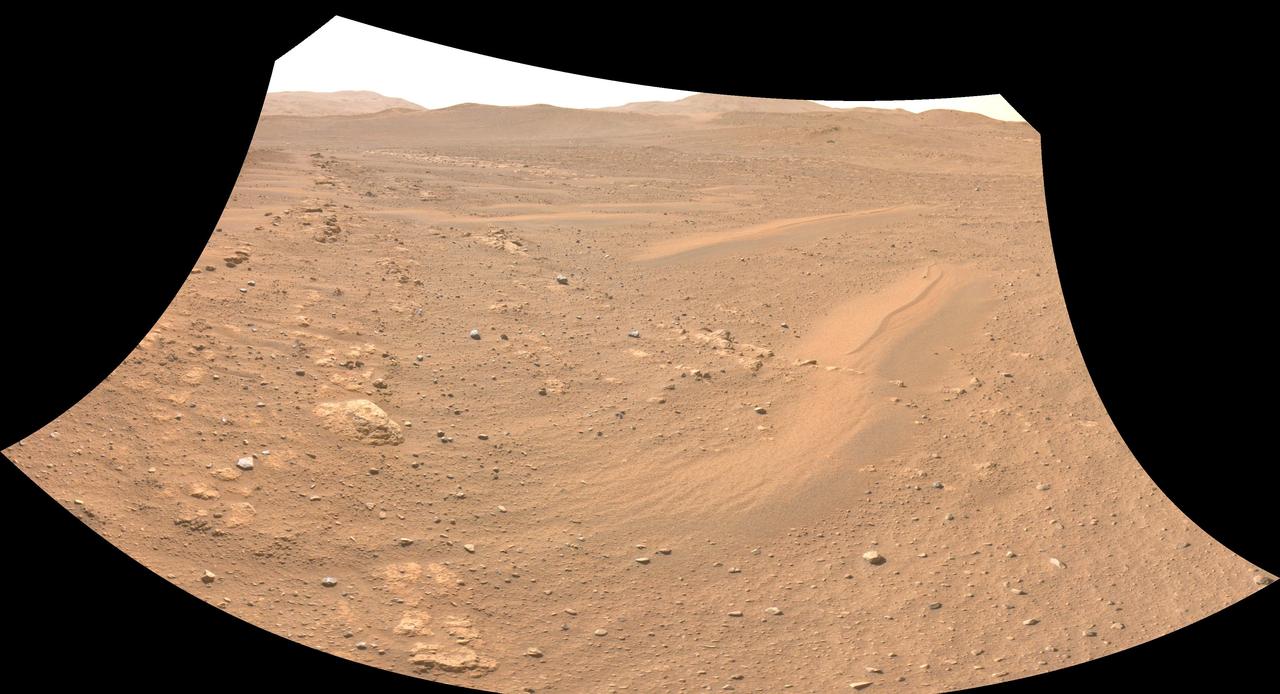
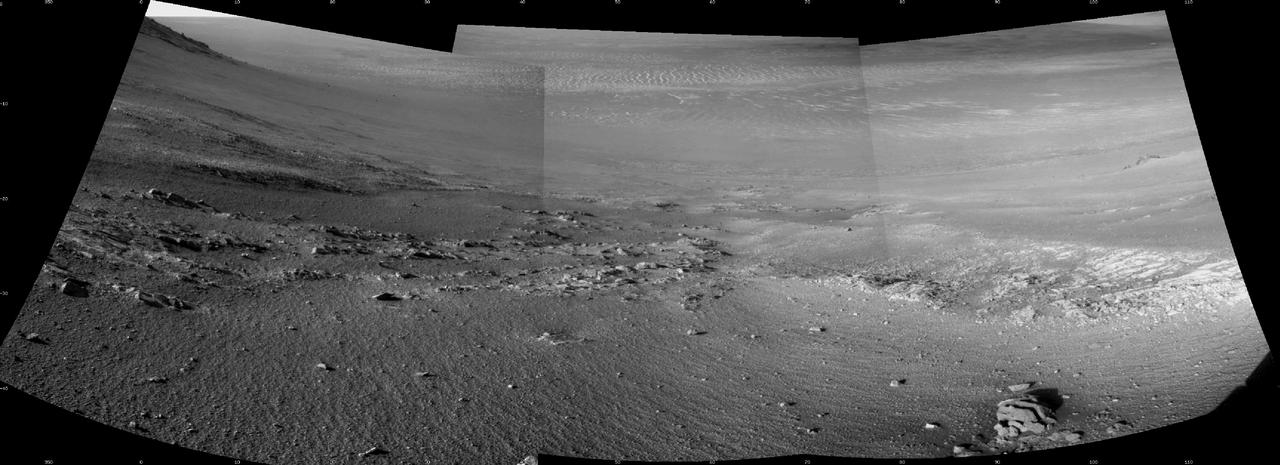
NASA's Perseverance Mars rover used its navigation cameras, or navcams, to capture this scene while driving up to Jezero Crater's rim on Nov. 11, 2024, the 1,326th Martian day, or sol, of the mission. The sandy terrain seen here, along with a 10-degree average slope, meant it was a slippery drive. Rover tracks trail off behind Perseverance in this image. Far in the distance is the floor of Jezero Crater. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA26479
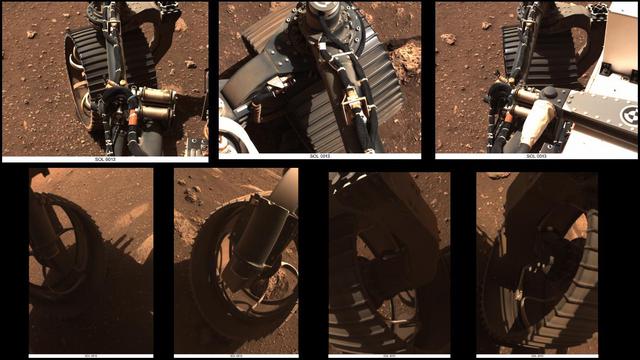
These sets of animated GIFs show seven views of NASA's Perseverance Mars rover wiggling its wheels on March 4, 2021, the day Perseverance completed its first drive on Mars. The first three sets of GIFs come from the Navigation Cameras (Navcams). The first view shows the front left wheel; the second the front right wheel; the third the rear right wheel. The next four sets come from the Hazard Avoidance Cameras (Hazcams). The fourth GIF shows the front left wheel again; the fifth the front right wheel again; the sixth the rear left wheel; and the seventh the rear right wheel again. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animations available at https://photojournal.jpl.nasa.gov/catalog/PIA24489
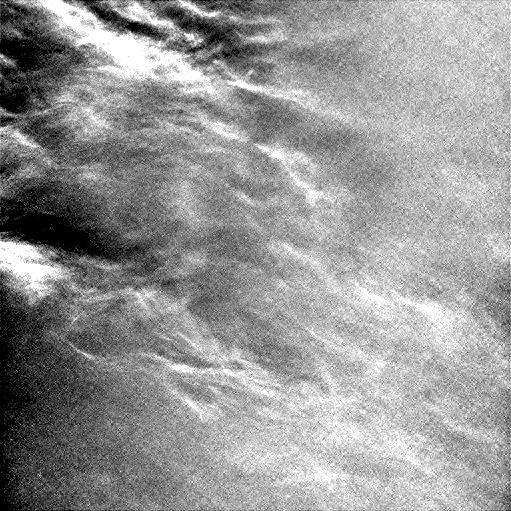
Wispy clouds float across the Martian sky in this accelerated sequence of enhanced images from NASA's Curiosity Mars rover. The rover's Navigation Camera (Navcam) took these eight images over a span of four minutes early in the morning of the mission's 1,758th Martian day, or sol (July 17, 2017), aiming nearly straight overhead. They have been processed by first making a "flat field' adjustment for known differences in sensitivity among pixels and correcting for camera artifacts due to light reflecting within the camera, and then generating an "average" of all the frames and subtracting that average from each frame. This subtraction results in emphasizing any changes due to movement or lighting. The clouds are also visible, though fainter, in a raw image sequence from these same observations. On the same Martian morning, Curiosity also observed clouds near the southern horizon. The clouds resemble Earth's cirrus clouds, which are ice crystals at high altitudes. These Martian clouds are likely composed of crystals of water ice that condense onto dust grains in the cold Martian atmosphere. Cirrus wisps appear as ice crystals fall and evaporate in patterns known as "fall streaks" or "mare's tails." Such patterns have been seen before at high latitudes on Mars, for instance by the Phoenix Mars Lander in 2008, and seasonally nearer the equator, for instance by the Opportunity rover. However, Curiosity has not previously observed such clouds so clearly visible from the rover's study area about five degrees south of the equator. The Hubble Space Telescope and spacecraft orbiting Mars have observed a band of clouds to appear near the Martian equator around the time of the Martian year when the planet is farthest from the Sun. With a more elliptical orbit than Earth's, Mars experiences more annual variation than Earth in its distance from the Sun. The most distant point in an orbit around the Sun is called the aphelion. The near-equatorial Martian cloud pattern observed at that time of year is called the "aphelion cloud belt." These new images from Curiosity were taken about two months before aphelion, but the morning clouds observed may be an early stage of the aphelion cloud belt. An animation is available at https://photojournal.jpl.nasa.gov/catalog/PIA21841
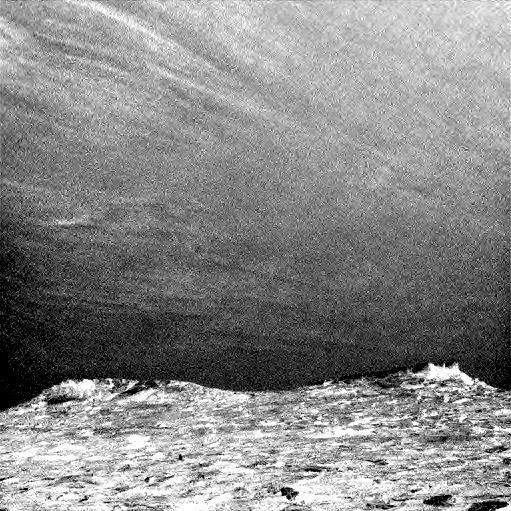
Clouds drift across the sky above a Martian horizon in this accelerated sequence of enhanced images from NASA's Curiosity Mars rover. The rover's Navigation Camera (Navcam) took these eight images over a span of four minutes early in the morning of the mission's 1,758th Martian day, or sol (July 17, 2017), aiming toward the south horizon. They have been processed by first making a "flat field' adjustment for known differences in sensitivity among pixels and correcting for camera artifacts due to light reflecting within the camera, and then generating an "average" of all the frames and subtracting that average from each frame. This subtraction emphasizes changes whether due to movement -- such as the clouds' motion -- or due to lighting -- such as changing shadows on the ground as the morning sunlight angle changed. On the same Martian morning, Curiosity also observed clouds nearly straight overhead. The clouds resemble Earth's cirrus clouds, which are ice crystals at high altitudes. These Martian clouds are likely composed of crystals of water ice that condense onto dust grains in the cold Martian atmosphere. Cirrus wisps appear as ice crystals fall and evaporate in patterns known as "fall streaks" or "mare's tails." Such patterns have been seen before at high latitudes on Mars, for instance by the Phoenix Mars Lander in 2008, and seasonally nearer the equator, for instance by the Opportunity rover. However, Curiosity has not previously observed such clouds so clearly visible from the rover's study area about five degrees south of the equator. The Hubble Space Telescope and spacecraft orbiting Mars have observed a band of clouds to appear near the Martian equator around the time of the Martian year when the planet is farthest from the Sun. With a more elliptical orbit than Earth's, Mars experiences more annual variation than Earth in its distance from the Sun. The most distant point in an orbit around the Sun is called the aphelion. The near-equatorial Martian cloud pattern observed at that time of year is called the "aphelion cloud belt." These new images from Curiosity were taken about two months before aphelion, but the morning clouds observed may be an early stage of the aphelion cloud belt. An animation is available at https://photojournal.jpl.nasa.gov/catalog/PIA21840

The lower portion of a Martian dust devil was captured by one of the Navcams on NASA's Perseverance rover on Aug. 30, 2023, the 899th Martian day, or sol, of the mission. The video, which has been enhanced in order to show maximal detail, was sped up 20 times and composed of 21 frames taken four seconds apart. Using data from the imagery, mission scientists determined that the dust devil was about 2.5 miles (4 kilometers) away, at a location nicknamed "Thorofare Ridge," and moving east to west at a clip of about 12 mph (19 kph). They calculated its width to be about 200 feet (60 meters). While only the bottom 387 feet (118 meters) of the swirling vortex are visible in the camera frame, scientists used the dust devil's shadow to estimate its full height at about 1.2 miles (2 kilometers). A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA26074
This mosaic scene combining five images from the navigation camera (Navcam) on NASA's Mars Exploration Rover Opportunity shows a view from inside the upper end of "Perseverance Valley" on the inner slope of Endeavour Crater's western rim. The valley is the main destination for the current two-year extension of the 13-year-old Opportunity mission on Mars. It was likely carved long ago by a fluid, such as water, water-lubricated debris or wind. The rover team is using Opportunity to learn more about the processes that shaped the valley. Plans call for driving the rover down the full length of the valley, about twice the length of a football field. Opportunity entered the top end of Perseverance Valley after studying the area just outside the crater rim above the valley during the spring and early summer of 2017. The images combined into this scene were taken on July 7, 2017, during the 4,782nd Martian day, or sol, of the rover's work on Mars. Opportunity had driven about 45 feet (13.8 meters) earlier that same sol. The portion of this scene to the left of the shadow of the rover's mast shows Perseverance Valley descending to the floor of Endeavour Crater. Foreground areas in the middle and right sections of the scene shows terrain details in the upper end of the valley. More distant in the center section, the rim of Endeavour Crater extends southeastward. The full scene spans from northeast at left to southwest at right. https://photojournal.jpl.nasa.gov/catalog/PIA21724

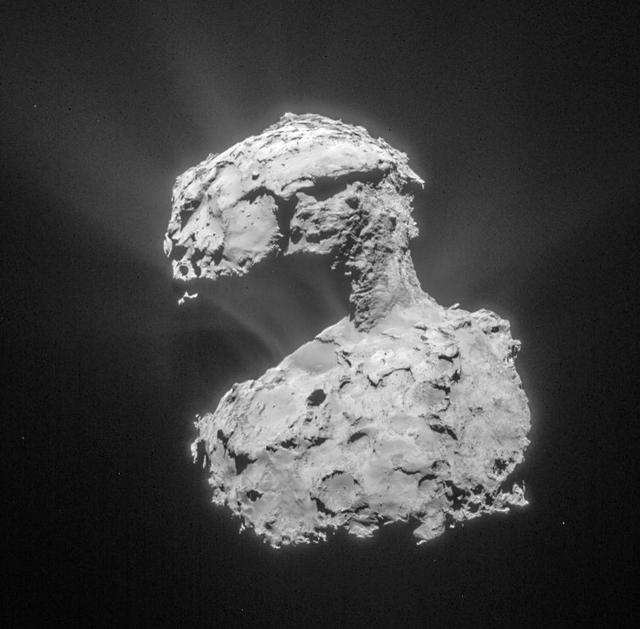
This mosaic of images from the navigation camera on the European Space Agency Rosetta spacecraft shows the nucleus of comet 67P/Churyumov-Gerasimenko as it appeared at 5 a.m. UTC on Dec. 17, 2014 9 p.m. PST on Dec. 16.
This mosaic of images from the navigation camera on the ESA Rosetta spacecraft shows the nucleus of comet 67P/Churyumov-Gerasimenko as it appeared at in the early morning, Universal Coordinated Time, of Dec. 17, 2014 evening of Dec. 16, PST.
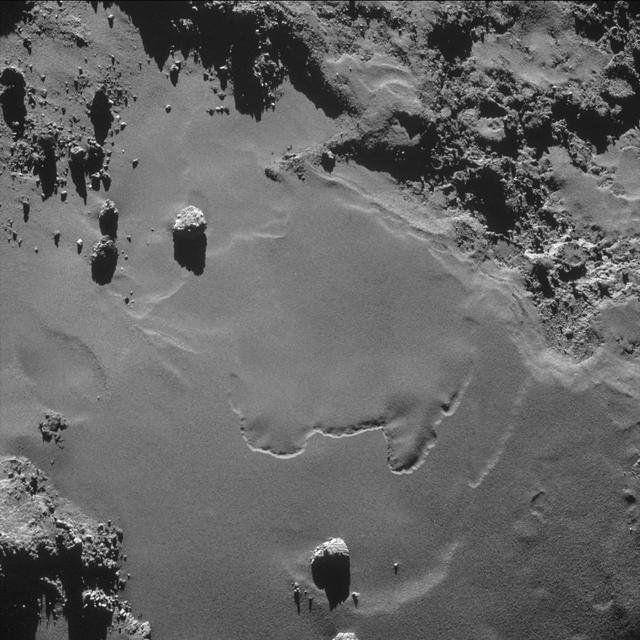
A patch of relatively smooth ground on the nucleus surface of comet 67P/Churyumov-Gerasimenko appears in this image taken by the navigation camera on the European Space Agency Rosetta spacecraft in October 2014.
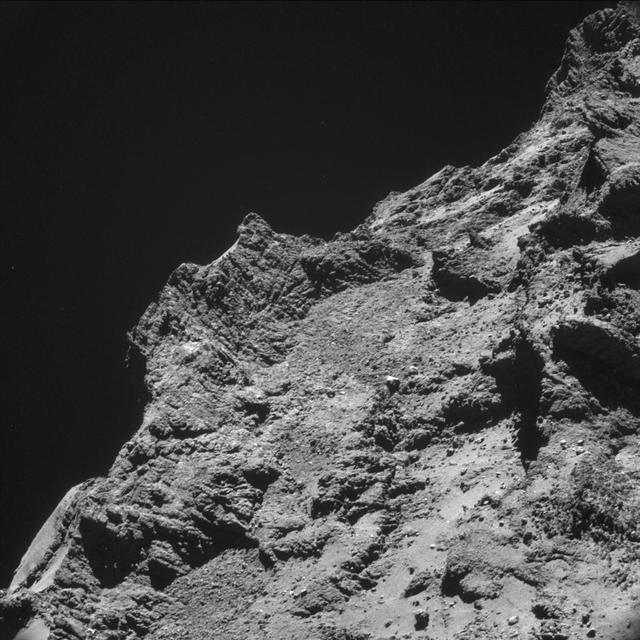
Some relatively rough terrain on the nucleus of comet 67P/Churyumov-Gerasimenko appears in this image taken by the navigation camera on the European Space Agency Rosetta spacecraft in the second half of October 2014.
This image, taken by ESA Rosetta navigation camera, was taken from a distance of about 53 miles 86 kilometers from the center of Comet 67P/Churyumov-Gerasimenko on March 14, 2015. The image has a resolution of 24 feet (7 meters) per pixel and is cropped and processed to bring out the details of the comet's activity. http://photojournal.jpl.nasa.gov/catalog/PIA19687
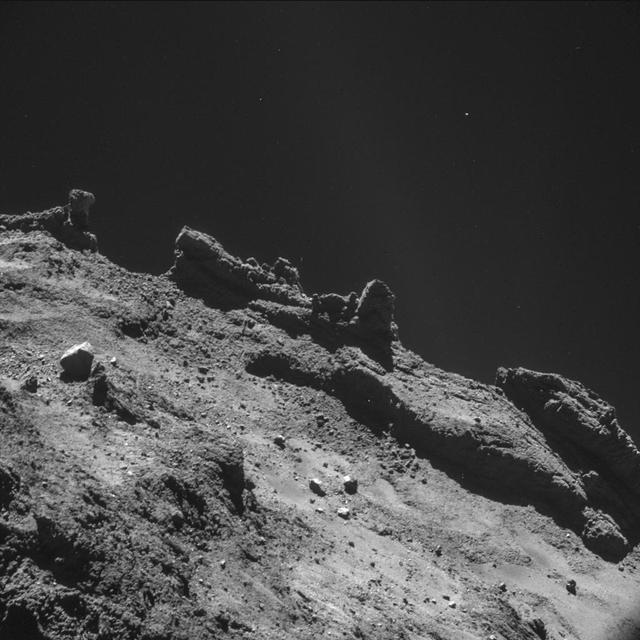
A jagged horizon of the nucleus of comet 67P/Churyumov-Gerasimenko appears in this image taken by the navigation camera on the ESA Rosetta spacecraft during the second half of October 2014.
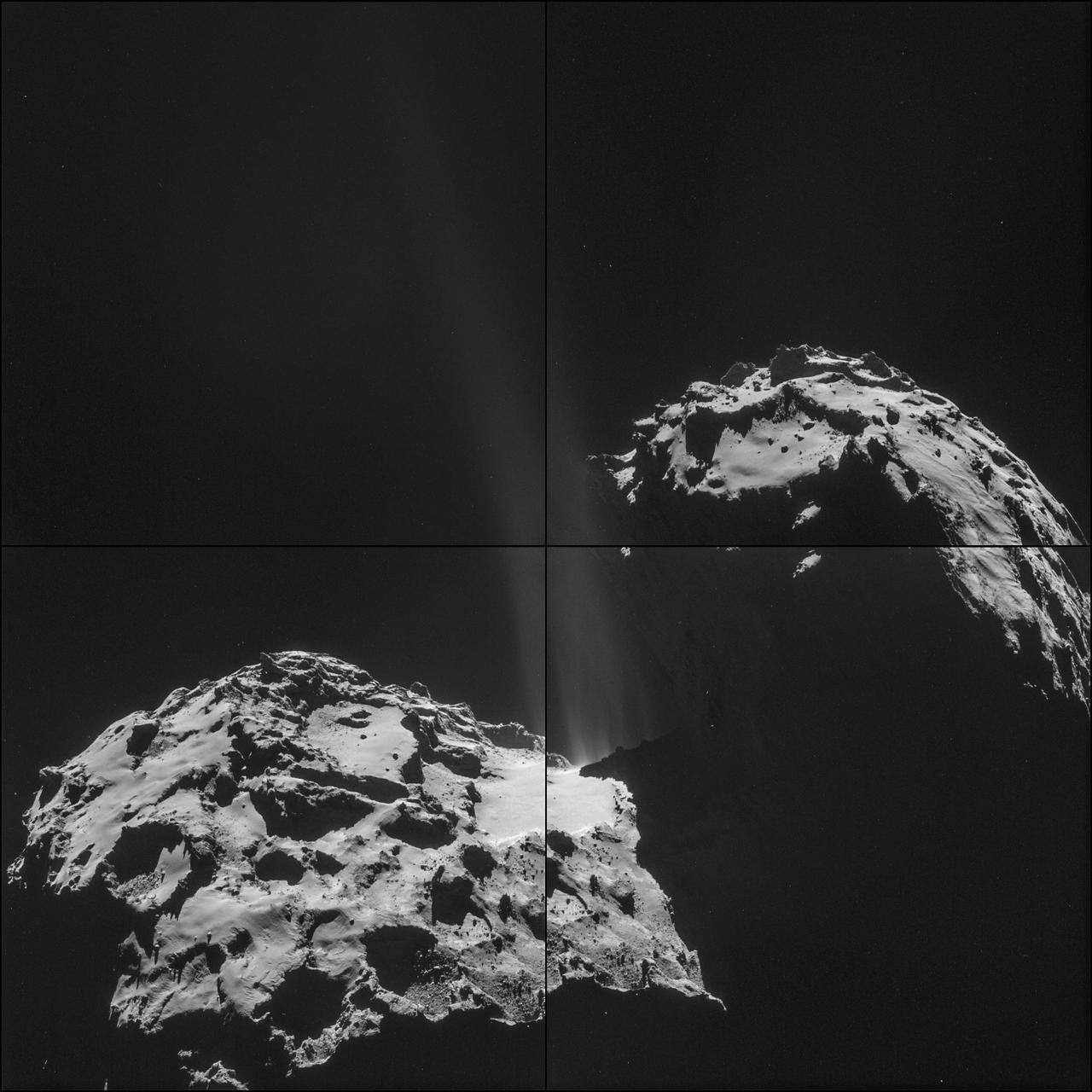
Four images taken by the ESA Rosetta spacecraft create a montage showing jets of dust and gas escaping from the nucleus of comet 67P/Churyumov–Gerasimenko.
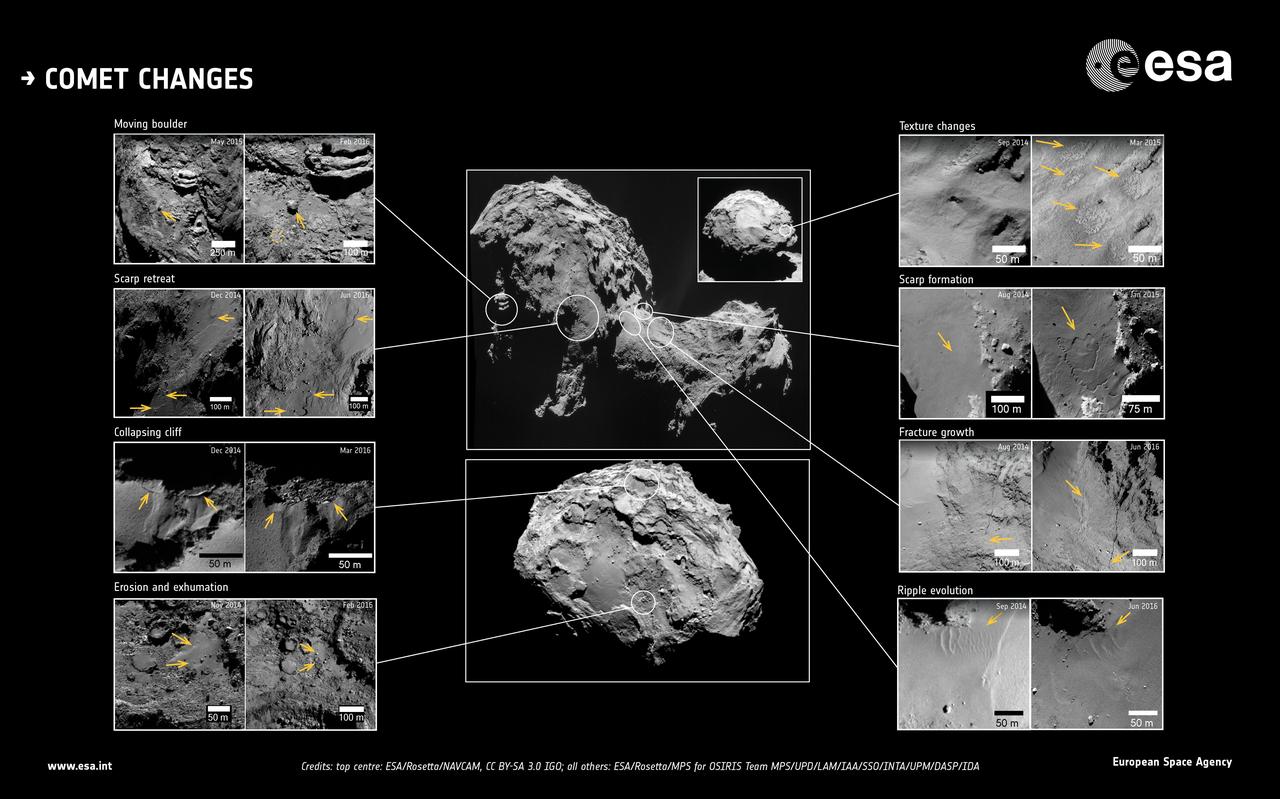
This image showcases changes identified in high-resolution images of Comet 67P/Churyumov-Gerasimenko during more than two years of monitoring by ESA's Rosetta spacecraft. The approximate locations of each feature are marked on the central context images. Dates of when the before and after images were taken are also indicated. Note that the orientation and resolution between image pairs may vary, therefore set arrows in each image point to the location of the changes, for guidance. http://photojournal.jpl.nasa.gov/catalog/PIA21566