
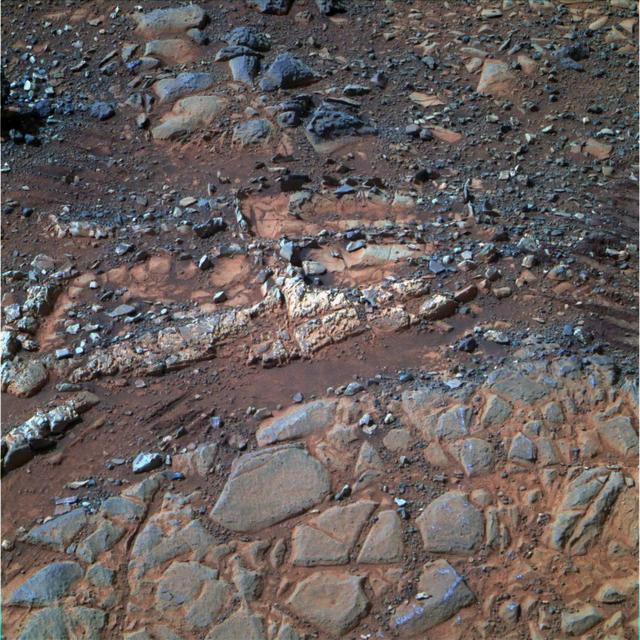
The target beneath the tool turret at the end of the rover's robotic arm in this image from NASA's Mars Exploration Rover Opportunity is "Private John Potts." It lies high on the southern side of "Marathon Valley," which slices through the western rim of Endeavour Crater. The target's informal name refers to a member of the Lewis and Clark Expedition's Corps of Discovery. The image was taken by Opportunity's front hazard avoidance camera on Jan. 5, 2016, during the 4,248th Martian day, or sol, of the rover's work on Mars. This camera is mounted low on the rover and has a wide-angle lens. In this image, the microscopic imager on the turret is pointed downward. Opportunity's examination of this target also used the turret's rock abrasion tool for removing the surface crust and alpha particle X-ray spectrometer for identifying chemical elements in the rock. http://photojournal.jpl.nasa.gov/catalog/PIA20285
Frost on Mars Rover Opportunity

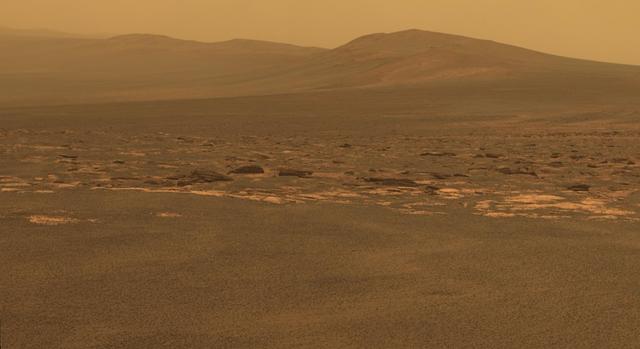
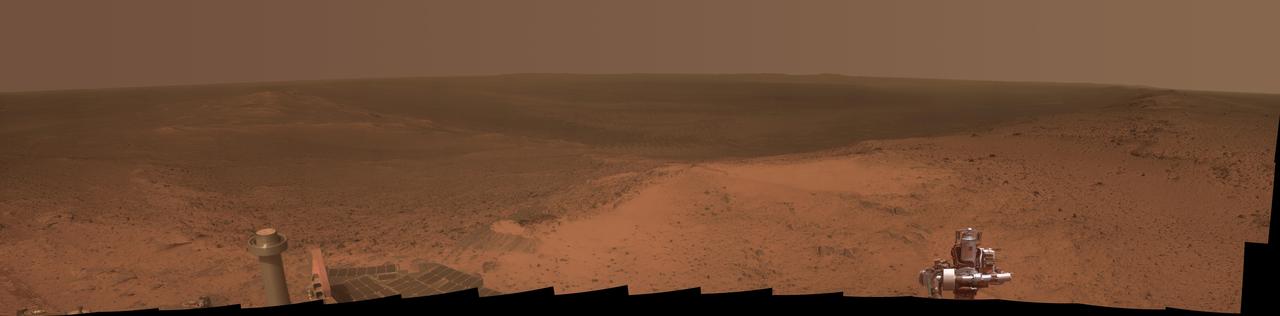
The Opportunity Rover at Victoria Crater

This view of a small, relatively fresh crater on Mars combines images from the left eye and right eye of the Panoramic Camera (Pancam) on NASA's Opportunity Mars rover, to appear three-dimensional when seen through blue-red glasses with the red lens on the left. The rover paused beside the crater in April 2017, during the 45th anniversary of the Apollo 16 mission to the moon. The rover team chose to call it "Orion Crater," after the Apollo 16 lunar module. The crater's diameter is about 90 feet (27 meters). From the small amount of erosion or filling that Orion Crater has experienced, its age is estimated at no more than 10 million years. It lies on the western rim of Endeavour Crater. For comparison, Endeavor is about 14 miles (22 kilometers) in diameter and more than 3.6 billion years old. The component images were taken on April 26, 2017, during the 4,712th Martian day, or sol, of Opportunity's work on Mars. Apollo 16 astronauts John Young and Charles Duke flew in the Orion lunar module to and from the first human landing in the lunar highlands while Ken Mattingly orbited the moon in the command module, Casper. On the moon, Young and Duke investigated Plum Crater, which is approximately the same size as Mars' Orion Crater. https://photojournal.jpl.nasa.gov/catalog/PIA21706

NASA's Opportunity Mars rover passed near this small, relatively fresh crater in April 2017, during the 45th anniversary of the Apollo 16 mission to the moon. The rover team chose to call it "Orion Crater," after the Apollo 16 lunar module. The rover's Panoramic Camera (Pancam) recorded this view. The crater's diameter is about 90 feet (27 meters). From the small amount of erosion or filling that Orion Crater has experienced, its age is estimated at no more than 10 million years. It lies on the western rim of Endeavour Crater. For comparison, Endeavor is about 14 miles (22 kilometers) in diameter and more than 3.6 billion years old. This view combines multiple images taken through three different Pancam filters. The selected filters admit light centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). The three color bands are combined here to show approximately true color. The component images were taken on April 26, 2017, during the 4,712th Martian day, or sol, of Opportunity's work on Mars. Apollo 16 astronauts John Young and Charles Duke flew in the Orion lunar module to and from the first human landing in the lunar highlands while Ken Mattingly orbited the moon in the command module, Casper. On the moon, Young and Duke investigated Plum Crater, which is approximately the same size as Mars' Orion Crater. https://photojournal.jpl.nasa.gov/catalog/PIA21708

NASA's Opportunity Mars rover passed near this small, relatively fresh crater in April 2017, during the 45th anniversary of the Apollo 16 mission to the moon. The rover team chose to call it "Orion Crater," after the Apollo 16 lunar module. The rover's Panoramic Camera (Pancam) recorded this view, presented in enhanced color to make differences in surface materials more easily visible. The crater's diameter is about 90 feet (27 meters). From the small amount of erosion or filling that Orion Crater has experienced, its age is estimated at no more than 10 million years. It lies on the western rim of Endeavour Crater. For comparison, Endeavor is about 14 miles (22 kilometers) in diameter and more than 3.6 billion years old. This view combines multiple images taken through three different Pancam filters. The selected filters admit light centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). The component images were taken on April 26, 2017, during the 4,712th Martian day, or sol, of Opportunity's work on Mars. Apollo 16 astronauts John Young and Charles Duke flew in the Orion lunar module to and from the first human landing in the lunar highlands while Ken Mattingly orbited the moon in the command module, Casper. On the moon, Young and Duke investigated Plum Crater, which is approximately the same size as Mars' Orion Crater. https://photojournal.jpl.nasa.gov/catalog/PIA21707

Three-Frame Movie of Opportunity Rover at Victoria Crater
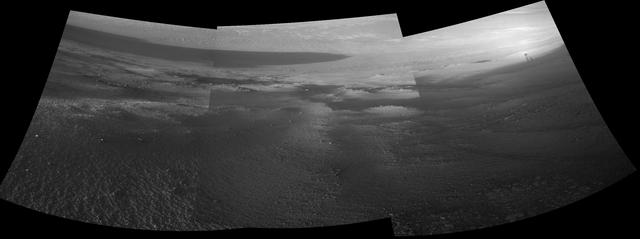
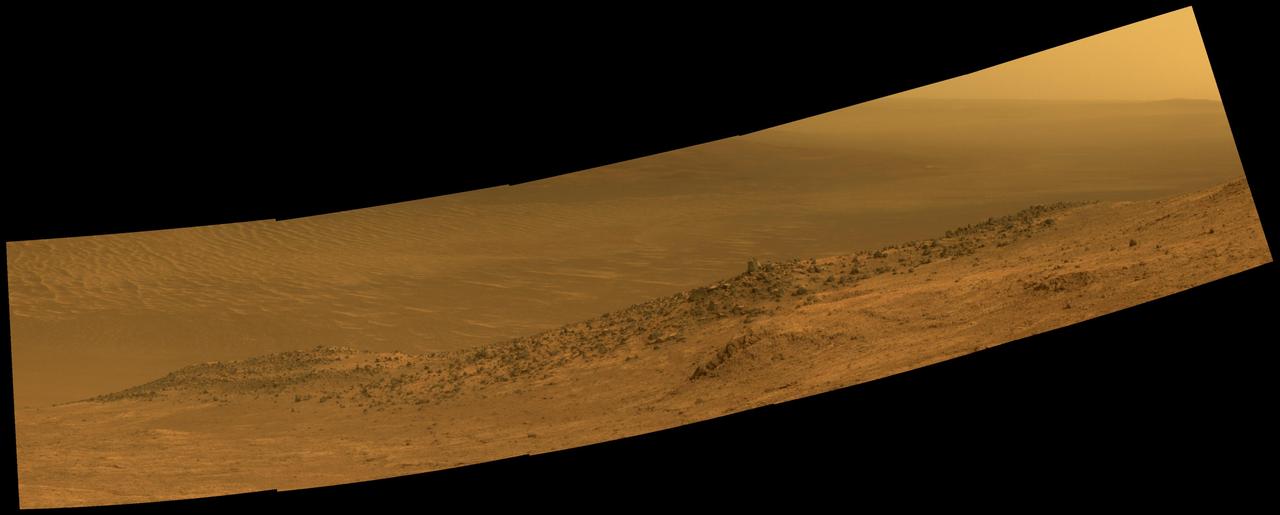
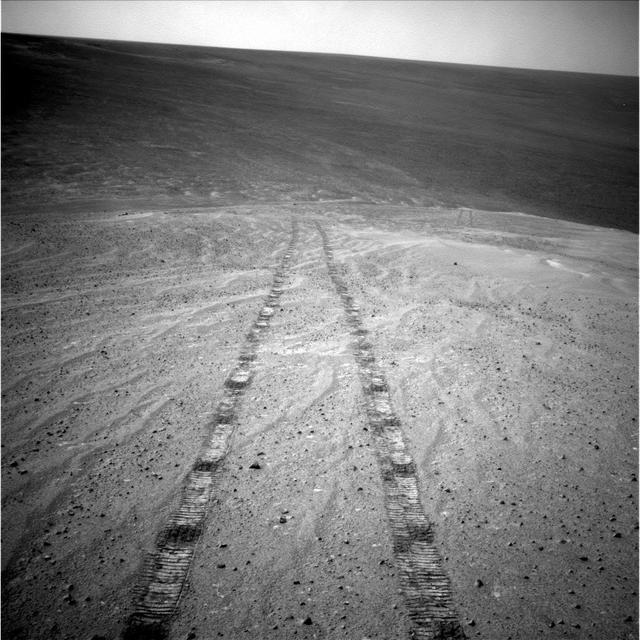
Late-afternoon shadows include one cast by the rover itself in this look toward the floor of Endeavour Crater by NASA's Mars Exploration Rover Opportunity. The rover recorded this scene on Nov. 11, 2017, during the 4,911th Martian day, or sol, of the rover's work on Mars. That was about a week before Opportunity's eighth Martian winter solstice. Opportunity's location is partway down a narrow valley that descends from the crest of the western rim of Endeavour Crater to the crater's floor. This fluid-carved set of troughs, called "Perseverance Valley," is the length of about two football fields, at a slope of about 15 to 17 degrees. The Navigation Camera (Navcam) on Opportunity's mast took the three component images stitched together into this scene. The images were taken about three minutes apart, long enough to see how the shadow was changing on the slope, at the seams between the images. Wheel tracks in the lower right of the scene were made before the rover climbed back uphill for a closer look at some rocks it had passed. The portions of the rover in the shadow at upper right include the mast with the Navcam and Panoramic Camera (Pancam) on top and the UHF radio antenna, which Opportunity uses to transmit images and other data to overflying orbiters for relay to Earth. https://photojournal.jpl.nasa.gov/catalog/PIA22071
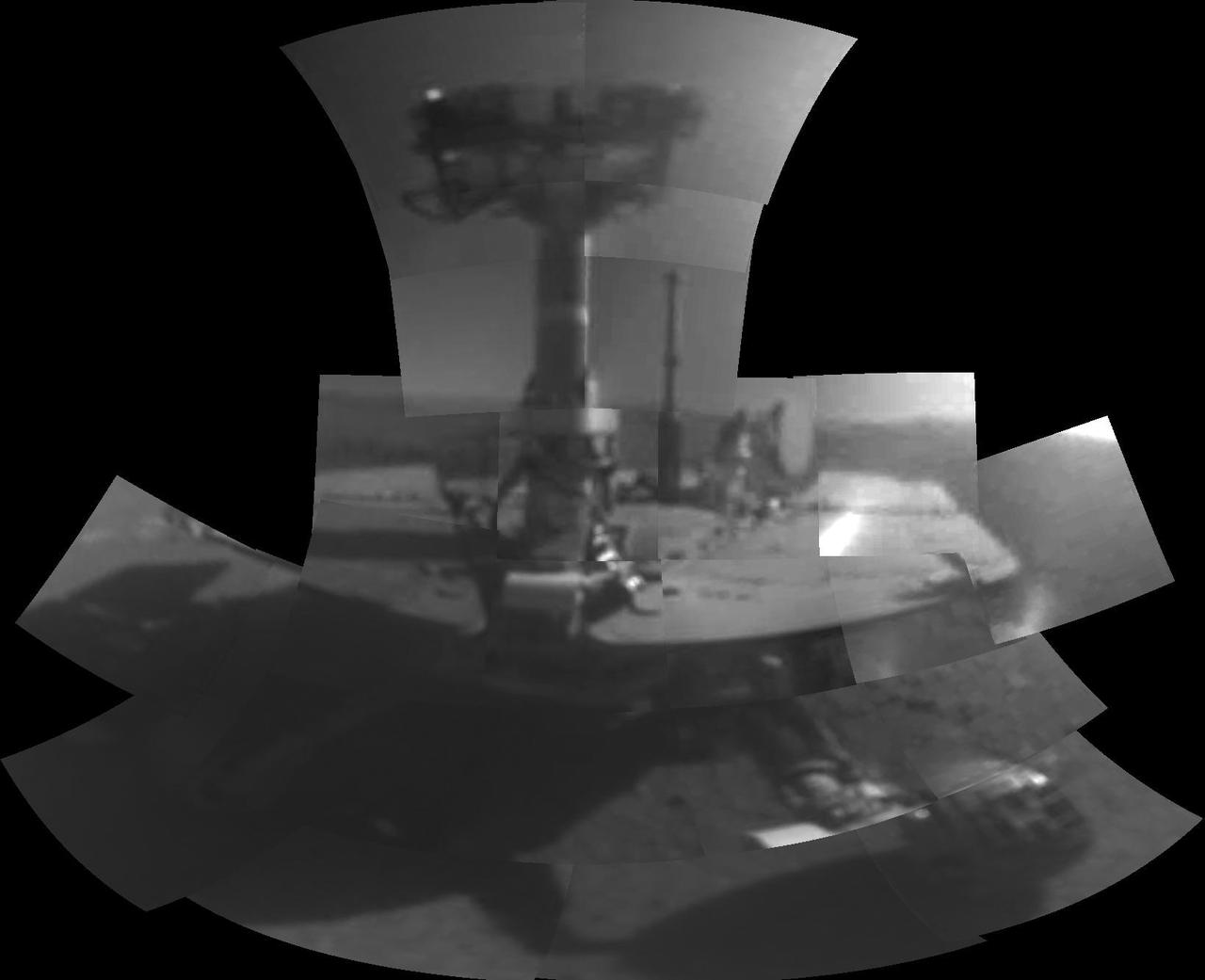
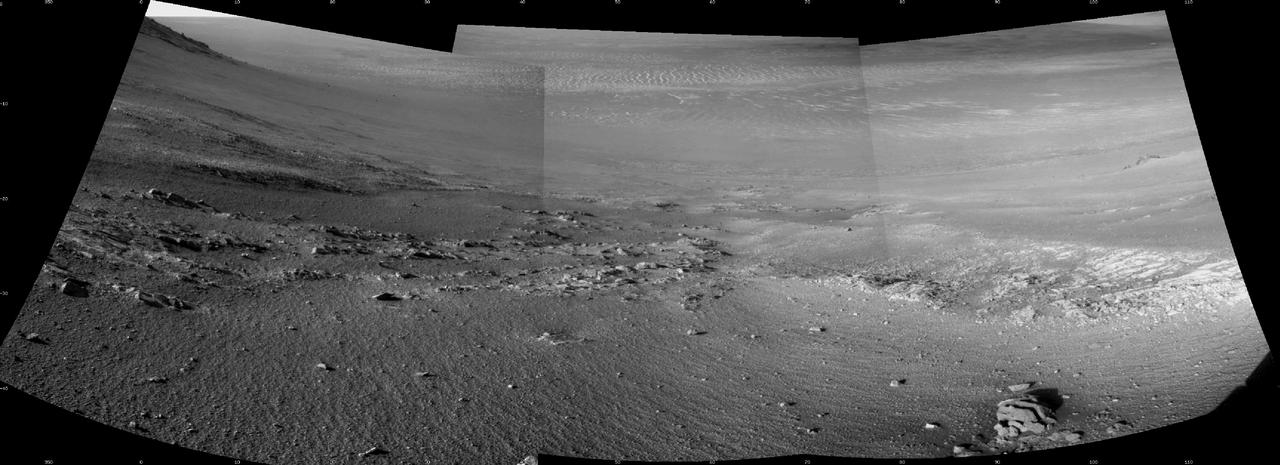
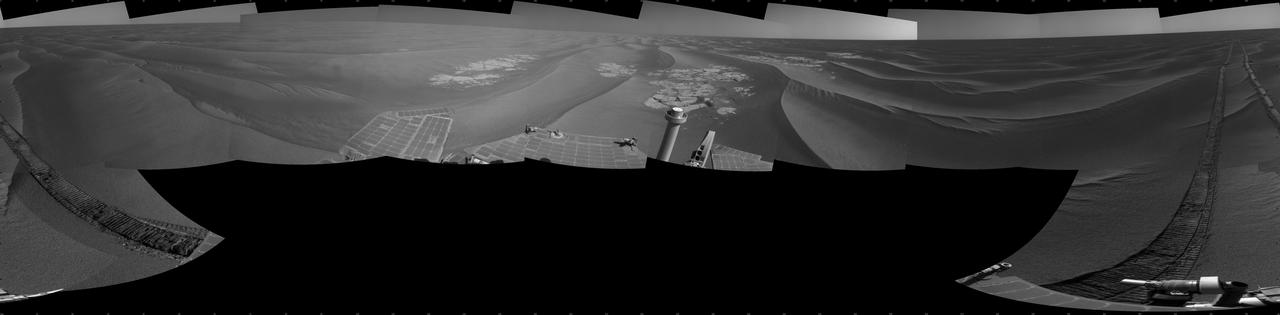
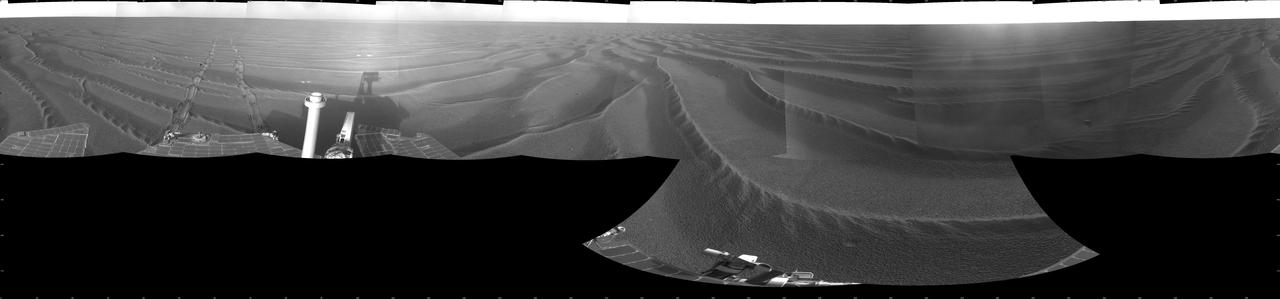
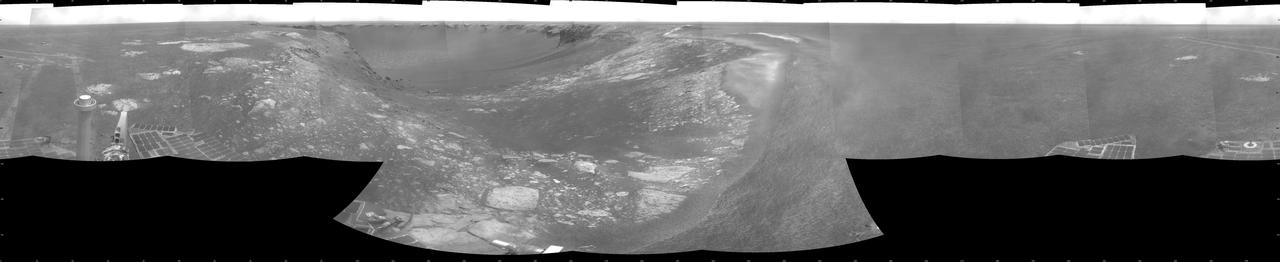
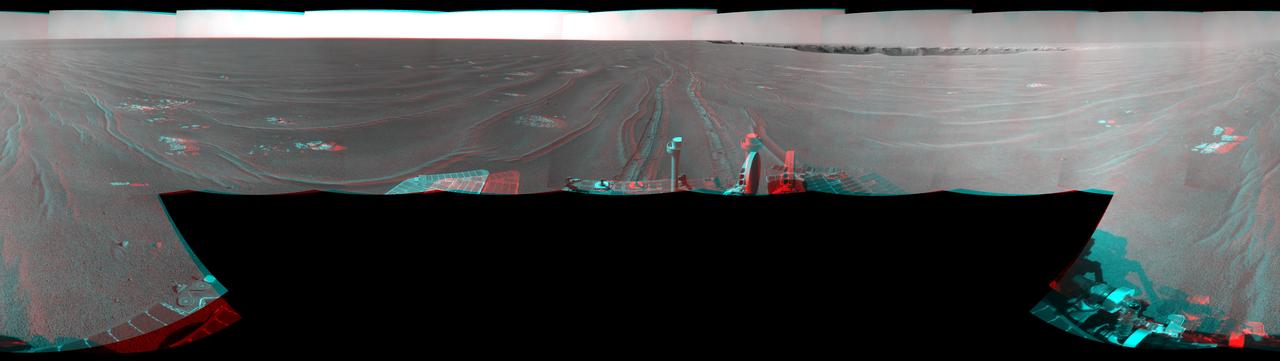
NASA's Mars Exploration Rover Opportunity used its navigation camera to take the images combined into this 360-degree view of the rover's surroundings on the 397th martian day, or sol, of its surface mission (March 6, 2005). Opportunity had completed a drive of 124 meters (407 feet) across the rippled flatland of the Meridiani Planum region on the previous sol, but did not drive on this sol. This location is catalogued as Opportunity's site 48. The view is presented here as a vertical projection with geometric and brightness seam correction. http://photojournal.jpl.nasa.gov/catalog/PIA07463
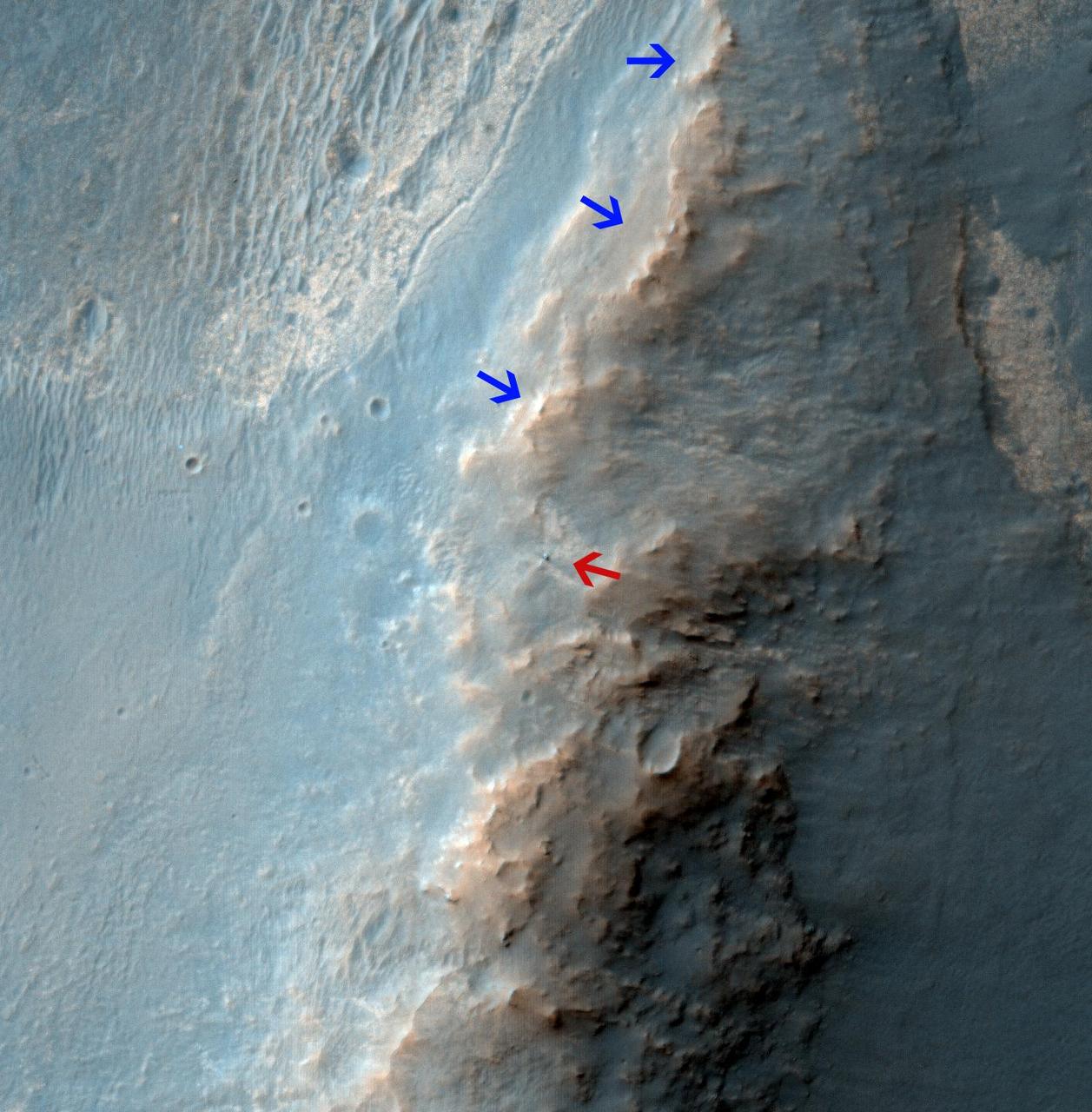
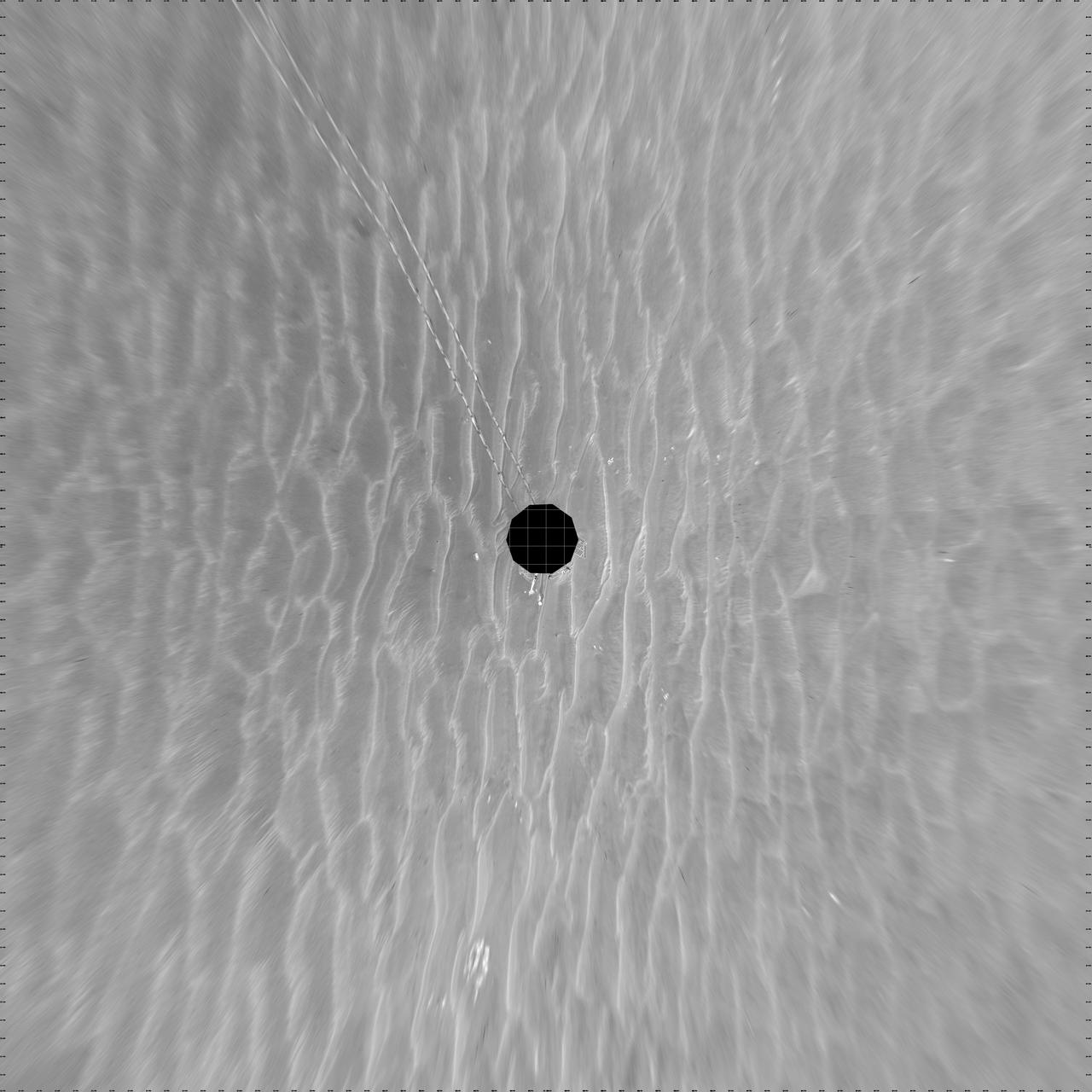
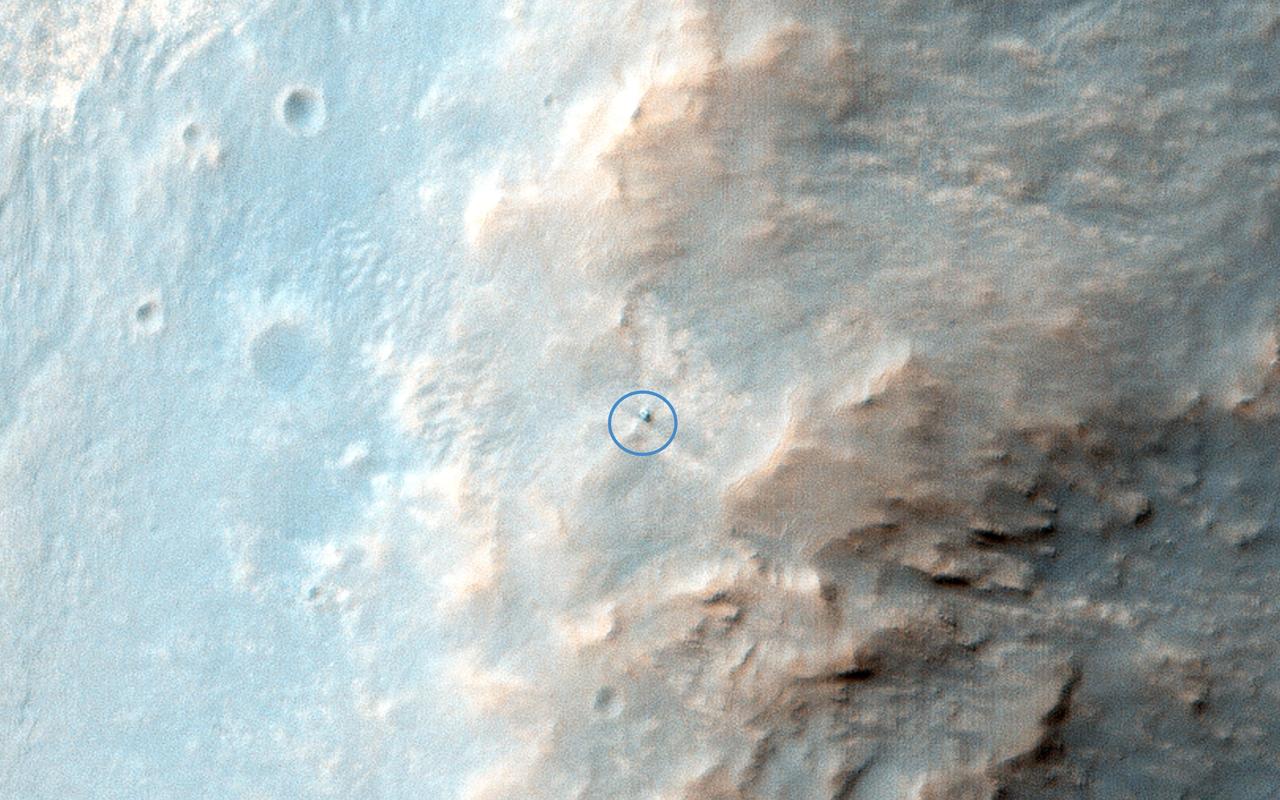
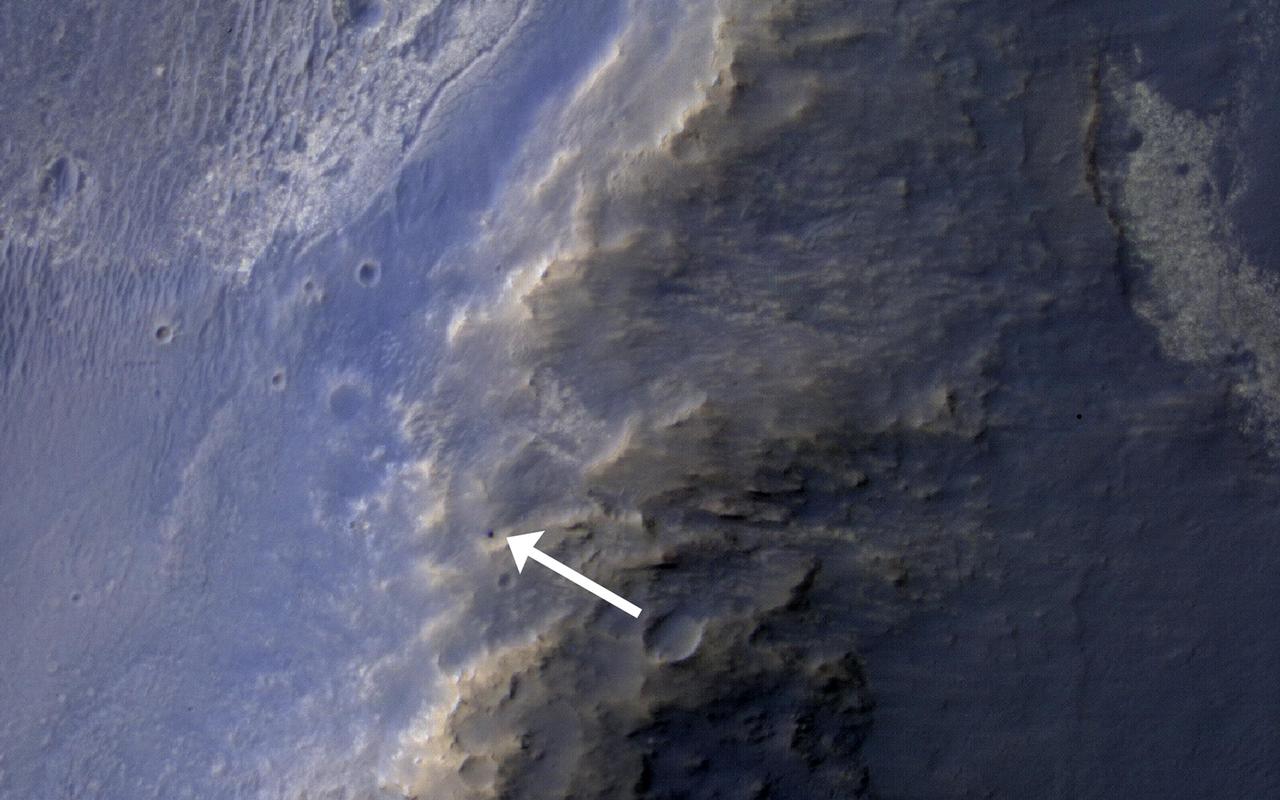
NASA Mars Reconnaissance Orbiter caught this view of NASA Mars Exploration Rover Opportunity on Feb. 14, 2014. The red arrow points to Opportunity at the center of the image. Blue arrows point to tracks left by the rover in October 2013.
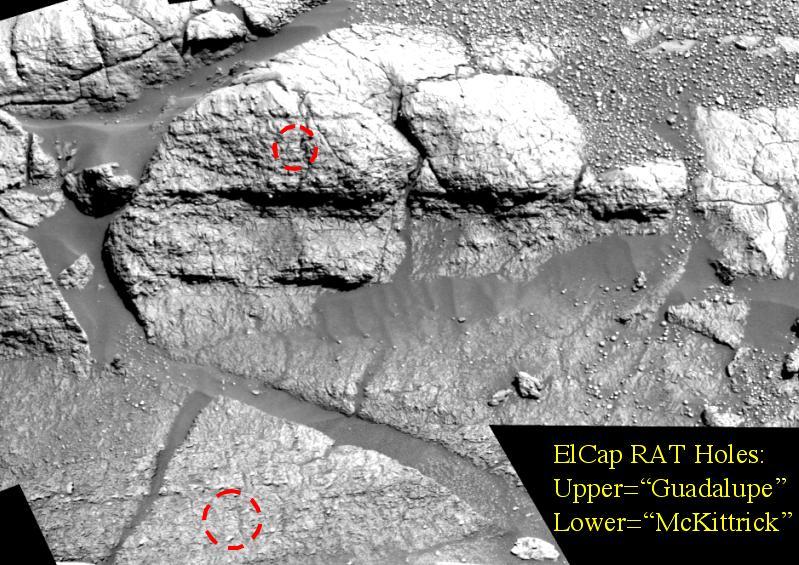
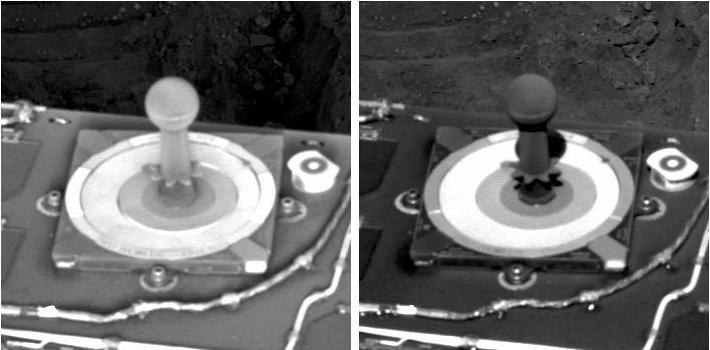
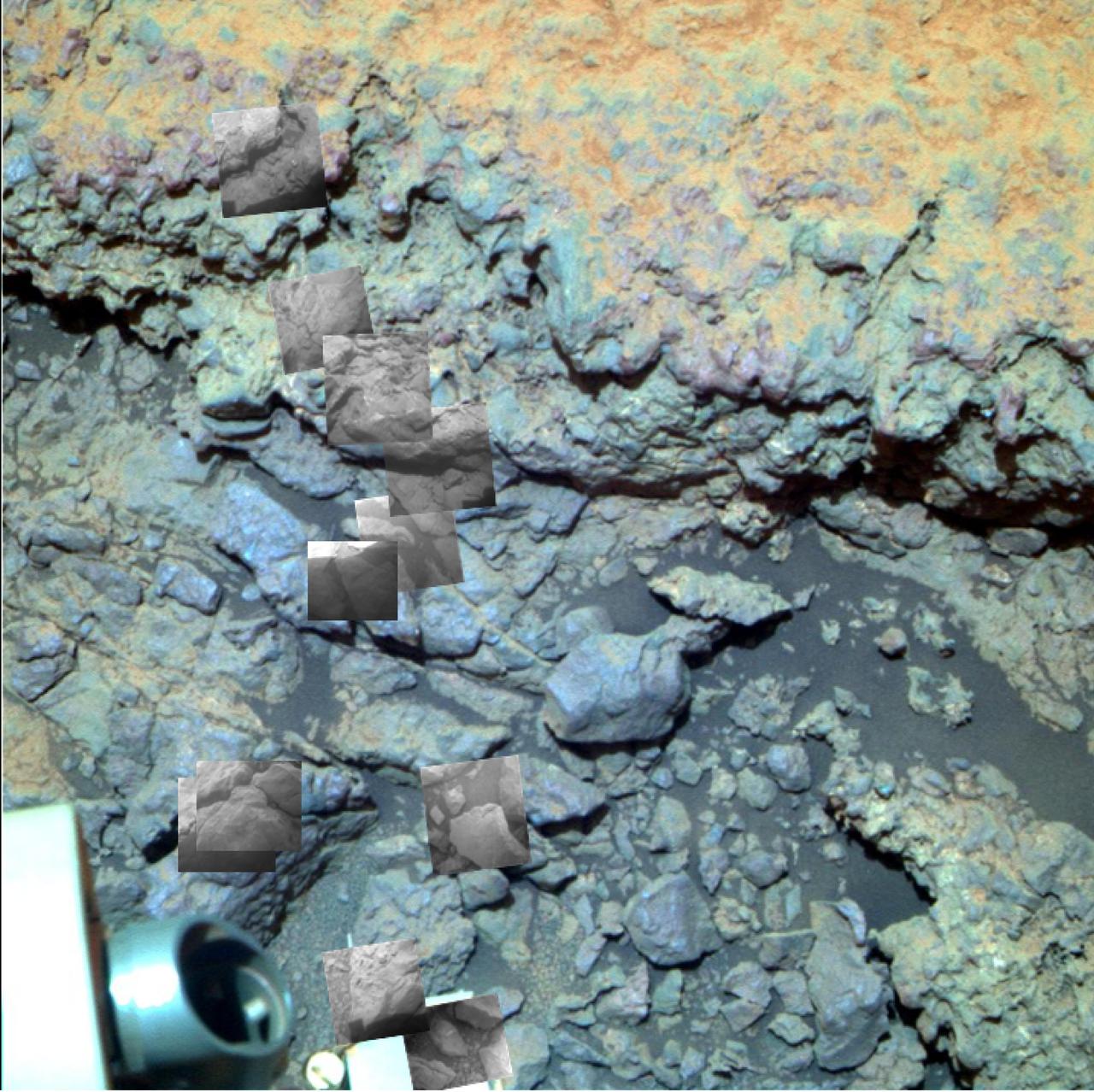
The red marks in this image, taken by the Mars Exploration Rover Opportunity's panoramic camera, indicate holes made by the rover's rock abrasion tool, located on its instrument deployment device, or "arm." The lower hole, located on a target called "McKittrick," was made on the 30th martian day, or sol, of Opportunity's journey. The upper hole, located on a target called "Guadalupe" was made on sol 34 of the rover's mission. The mosaic image was taken using a blue filter at the "El Capitan" region of the Meridiani Planum, Mars, rock outcrop. The image, shown in a vertical-perspective map projection, consists of images acquired on sols 27, 29 and 30 of the rover's mission. http://photojournal.jpl.nasa.gov/catalog/PIA05513
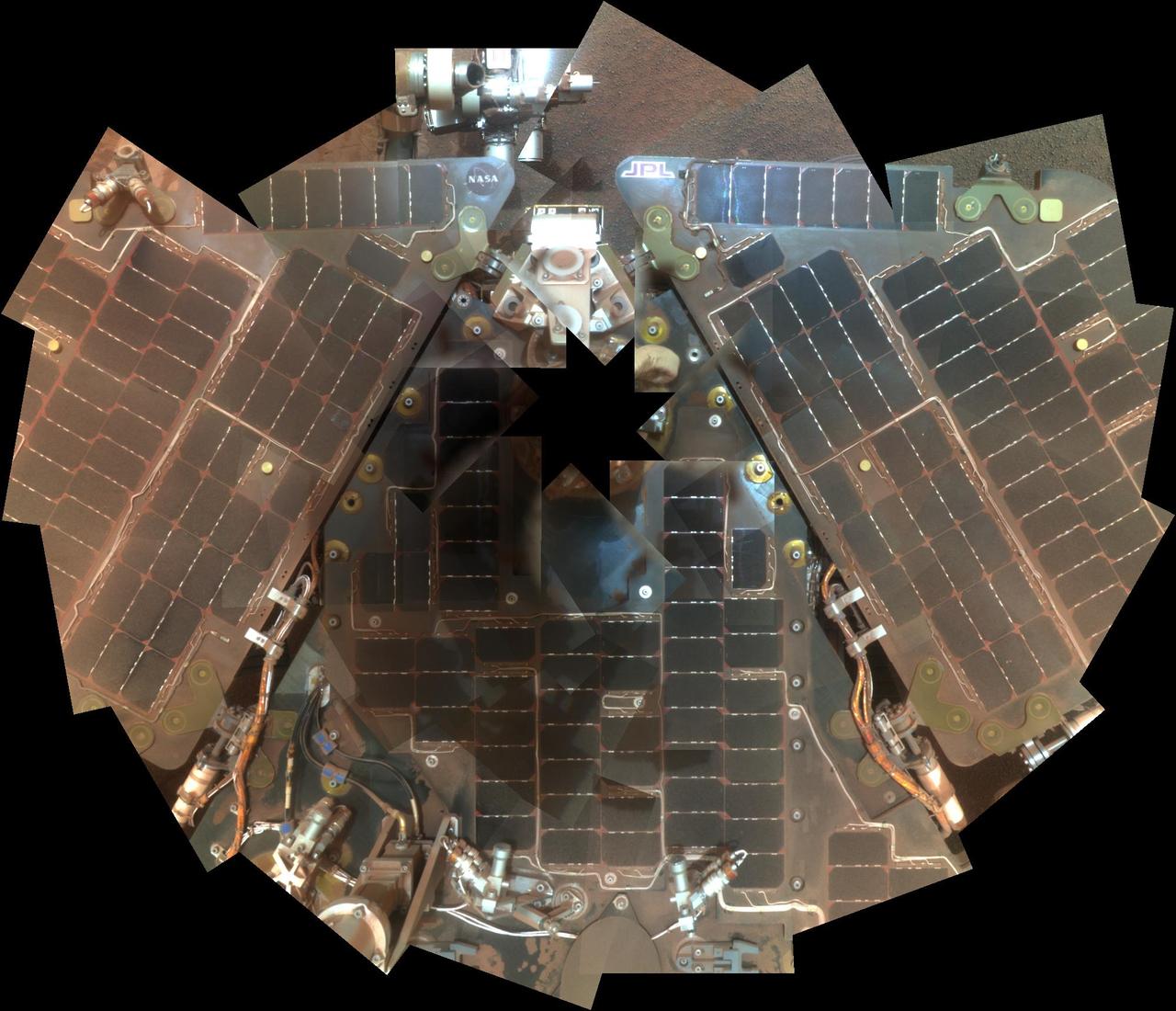
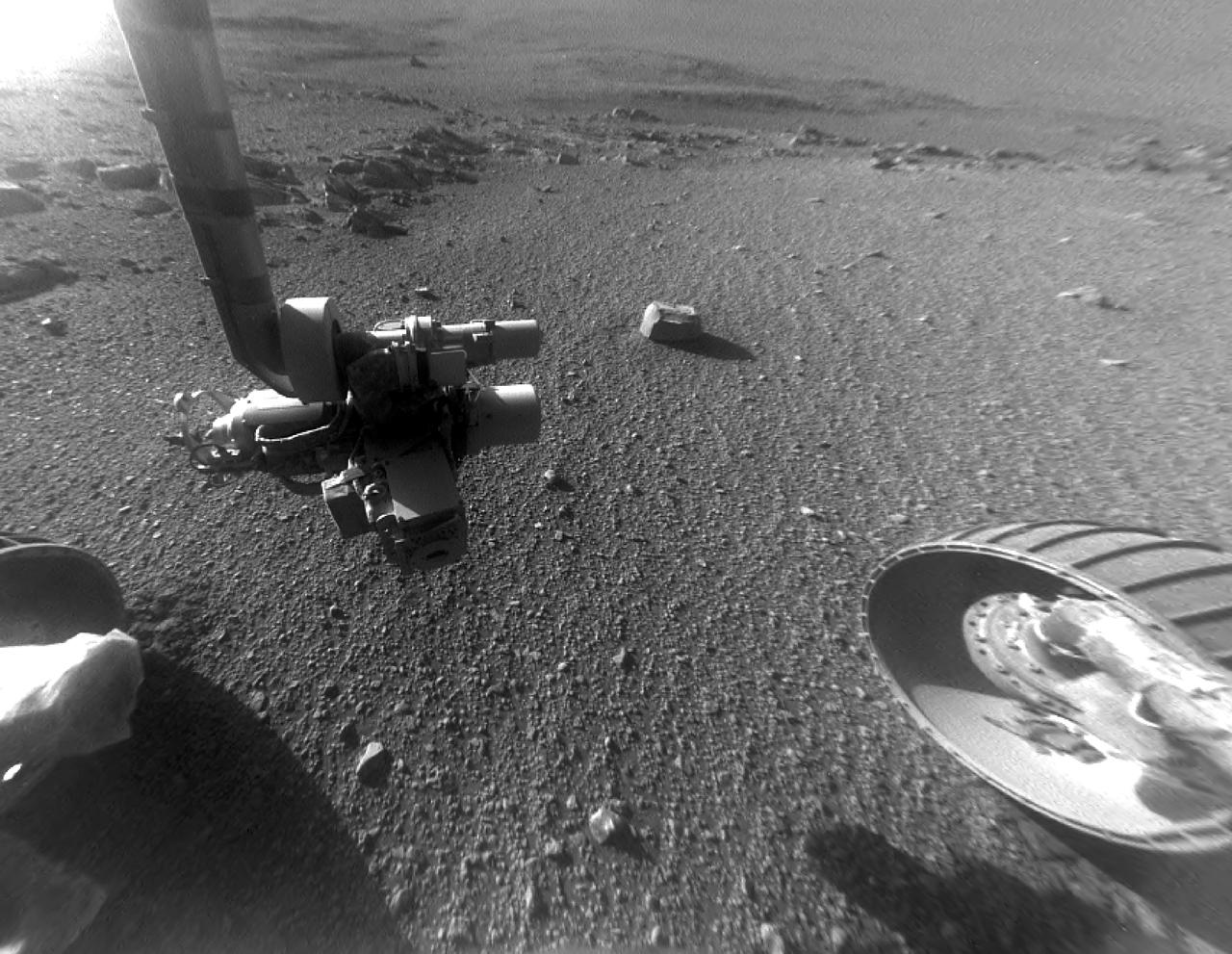
In 2007, NASA Mars Exploration Rover Opportunity had endured a Martian dust storm and the rover team wanted to assess the dustiness of the solar panels.
This is the latest image of NASA Opportunity rover at Solander Point, where it spend a few week investigation Pinnacle rock the jelly donut that was flipper over by the rover wheel. This observation is from NASA Mars Reconnaissance Orbiter.
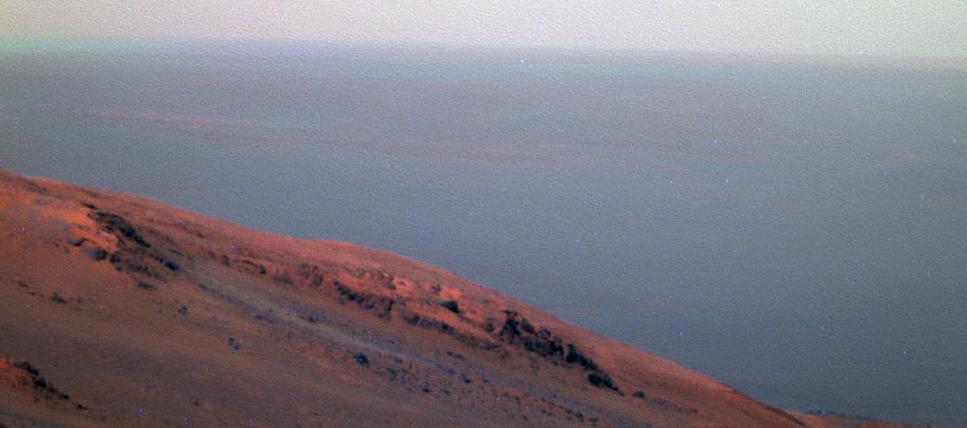
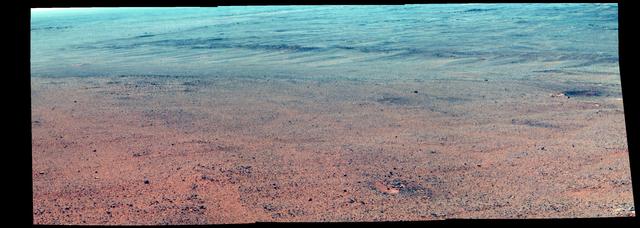
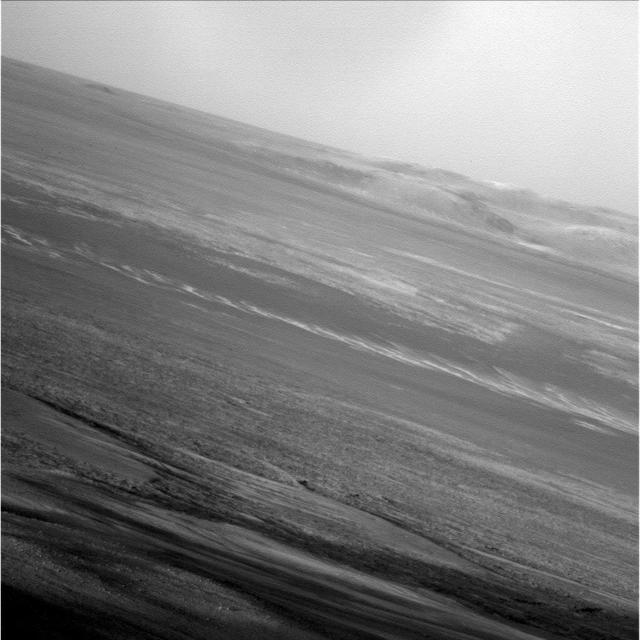
This false-color scene from the panoramic camera (Pancam) on NASA's Mars Exploration Rover Opportunity documents movement of dust as a regional dust storm approached the rover's location on Feb. 24, 2017, during the 4,653rd Martian day, or sol, of the rover's work on Mars. Key to detecting the movement is that Pancam color images are combinations of different images taken a short time apart through different color filters. Note that along the horizon, the left portion of the image has a bluish band (with label and arrow in Figure 1). The component image admitting blue light was taken about 150 seconds after the component image admitting red light. A layer of dust-carrying wind hadn't reached this location by the earlier exposure, but had by the later one. This Sol 4653 Opportunity view is toward the north from the rover's location on the western rim of Endeavour Crater in the Meridiani Planum region of Mars. http://photojournal.jpl.nasa.gov/catalog/PIA21485
This self-portrait of NASA's Opportunity Mars rover shows the vehicle at a site called "Perseverance Valley" on the slopes of Endeavour Crater. It was taken with the rover's Microscopic Imager to celebrate the 5000th Martian Day, or sol, of the rover's mission. The Microscopic Imager is a fixed-focus camera mounted at the end of the rover's robotic arm. Because it was designed for close inspection of rocks, soils and other targets at a distance of around 2.7 inches (7 cm), the rover is out of focus. The rover's self-portrait view is made by stitching together multiple images take on Sol 5,000 and 5,006 of the mission. Wrist motions and turret rotations on the arm allowed the Microscopic Imager to acquire the mosaic's component images. The resulting mosaic does not include the rover's arm. This simulation from planning software used to write commands for the rover shows the motion of the robotic arm, and an inset view of the Microscopic Imager. https://photojournal.jpl.nasa.gov/catalog/PIA22222
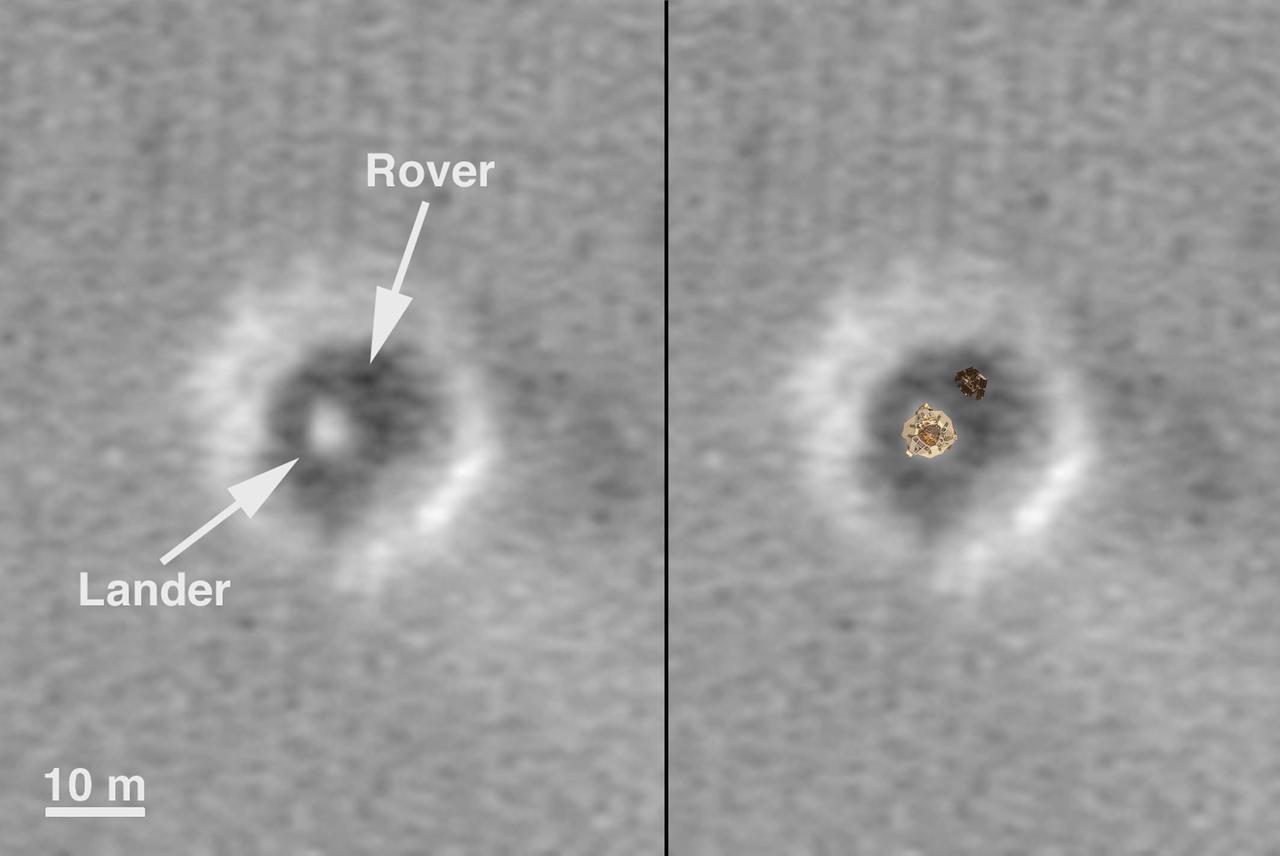
Comparison of a Computer Graphic Model of the Opportunity Lander and Rover with MOC Orbital Image

Mars Exploration Rover MER-B Opportunity Landing Site
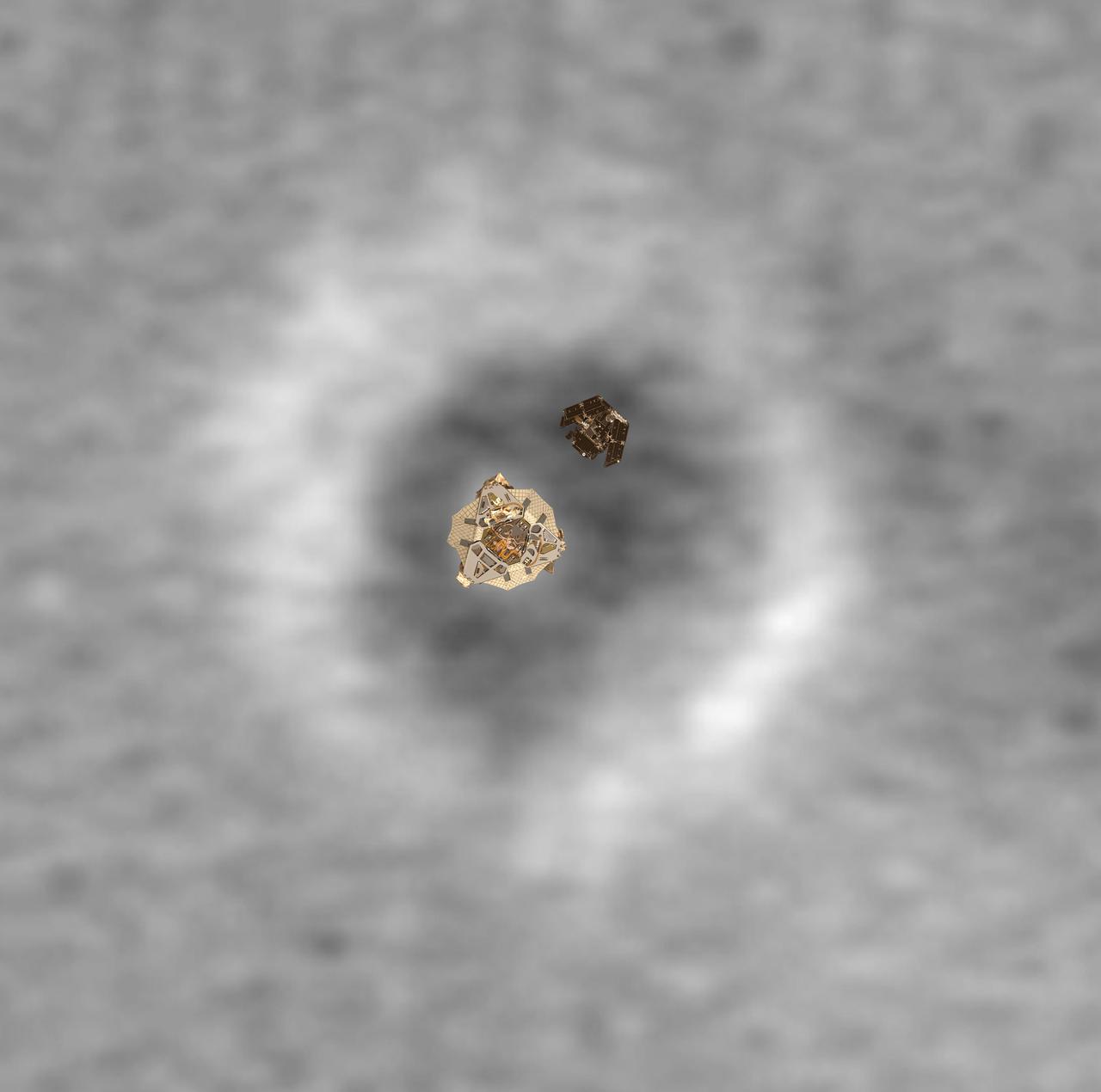
Top View of a Computer Graphic Model of the Opportunity Lander and Rover
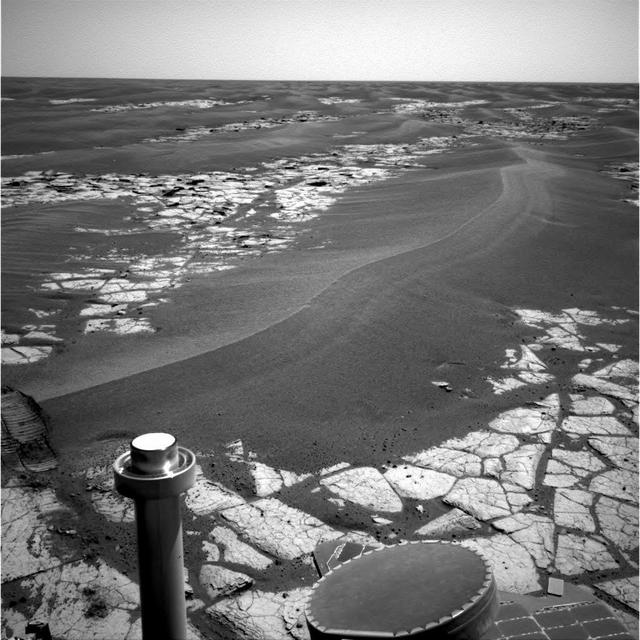
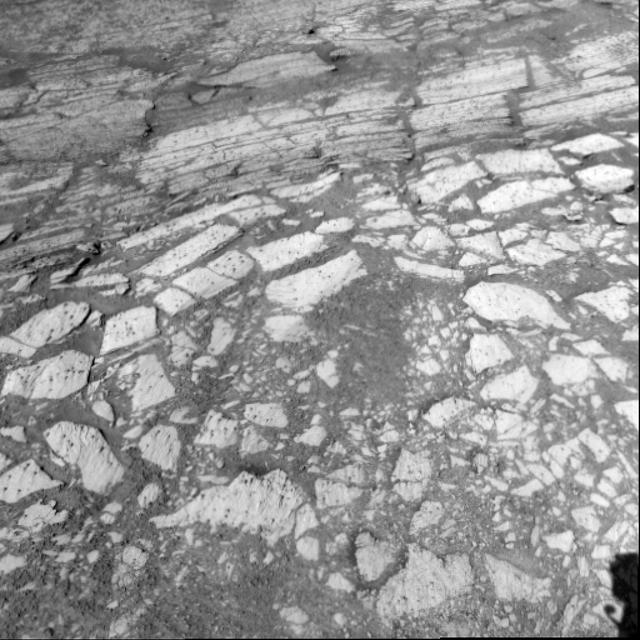
NASA's Mars Exploration Rover Opportunity continues to cut southward across a plain marked by large sand ripples and a pavement of outcrop rock. The ripple in the center of the image shows a distinct pattern of banding, which the science team hopes to investigate more closely during the trek through this terrain. The banding and other features have inspired a hypothesis that Meridiani ripples are old features that are currently being eroded, and not transported, by wind. This navigation camera image was taken on Opportunity's sol 795, April 19, 2006. http://photojournal.jpl.nasa.gov/catalog/PIA08424
Textured rows on the ground in this portion of "Perseverance Valley" are under investigation by NASA's Mars Exploration Rover Opportunity, which used its Navigation Camera (Navcam) to take the component images of this downhill-looking scene. The rover took this image on Jan. 4, 2018, during the 4,958th Martian day, or sol, of its work on Mars, looking downhill from a position about one-third of the way down the valley. Perseverance Valley descends the inboard slope of the western rim of Endeavour Crater. A view on the same sol with the rover's front Hazard Avoidance Camera includes ground even closer to the rover at this site. Opportunity was still working close by as it reached the mission's Sol 5,000 (Feb. 16, 2018). In the portion of the valley seen here, soil and gravel have been shaped into a striped pattern in the foreground and partially bury outcrops visible in the midfield. The long dimensions of the stripes are approximately aligned with the downhill direction. The striped pattern resembles a type of feature on Earth (such as on Hawaii's Mauna Kea) that is caused by repeated cycles of freezing and thawing, though other possible origins are also under consideration for the pattern in Perseverance Valley. The view is spans from north on the left to east-southeast on the right. For scale, the foreground rock clump in the lower right is about 11 inches (28 centimeters) in width. https://photojournal.jpl.nasa.gov/catalog/PIA22217
This HiRISE image of the Opportunity rover was acquired as a coordinated ride-along observation with the CRISM instrument, also onboard the Mars Reconnaissance Orbiter.

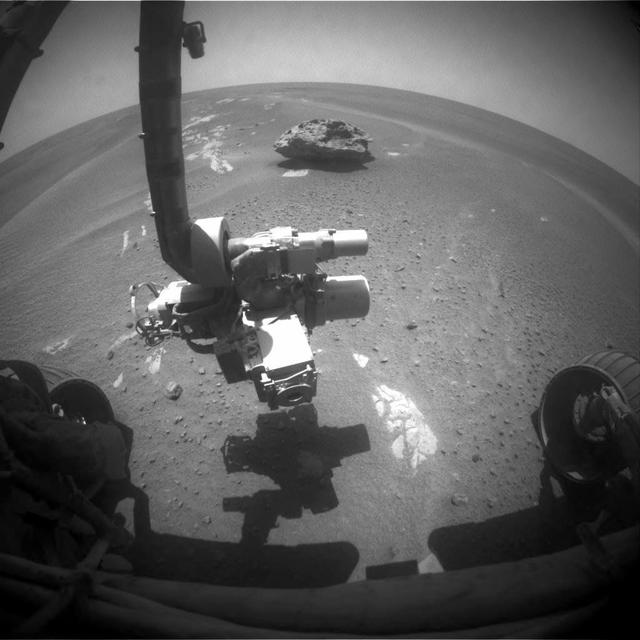
NASA's Mars Exploration Rover Opportunity has extended its robotic arm for studying a light-toned rock target called "Athens" in this image from the rover's front hazard avoidance camera. The camera recorded this image during the 3,970th Martian day, or sol, of Opportunity's work on Mars (March 25, 2015). This camera is mounted low on the rover and has a wide-angle lens. http://photojournal.jpl.nasa.gov/catalog/PIA19160
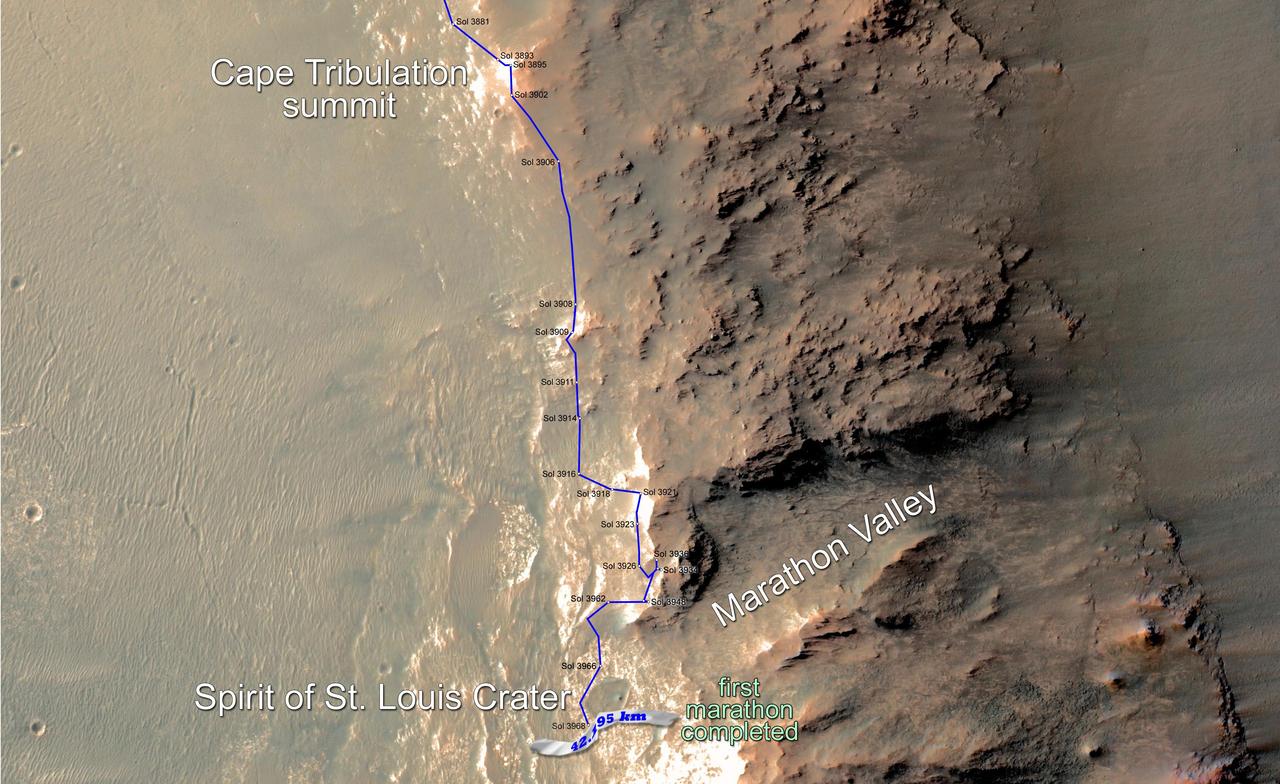
Eleven years and two months after its landing on Mars, the total driving distance of NASA's Mars Exploration Rover Opportunity surpassed the length of a marathon race: 26.219 miles (42.195 kilometers). This map shows the southward path driven by Opportunity from late December 2014 until it passed marathon distance on March 24, 2015, during the 3,968th Martian day, or sol, of the rover's work on Mars. Recent drives bring the vehicle close to a science destination called "Marathon Valley" on the west rim of Endeavour Crater. The rover team is using instruments on Opportunity to study "Spirit of St. Louis Crater" before entry into Marathon Valley. Opportunity reached the Sol 3881 location near the top of the map on Dec. 24, 2015. A map showing wider context of Opportunity's route from its January 2004 landing in Eagle Crater to Endeavour Crater is at PIA18404. A view from the Sol 3893 location at the summit of "Cape Tribulation," taken the following sol, is at PIA19109. The rover's traverse shown here has been mapped onto an image from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA19157
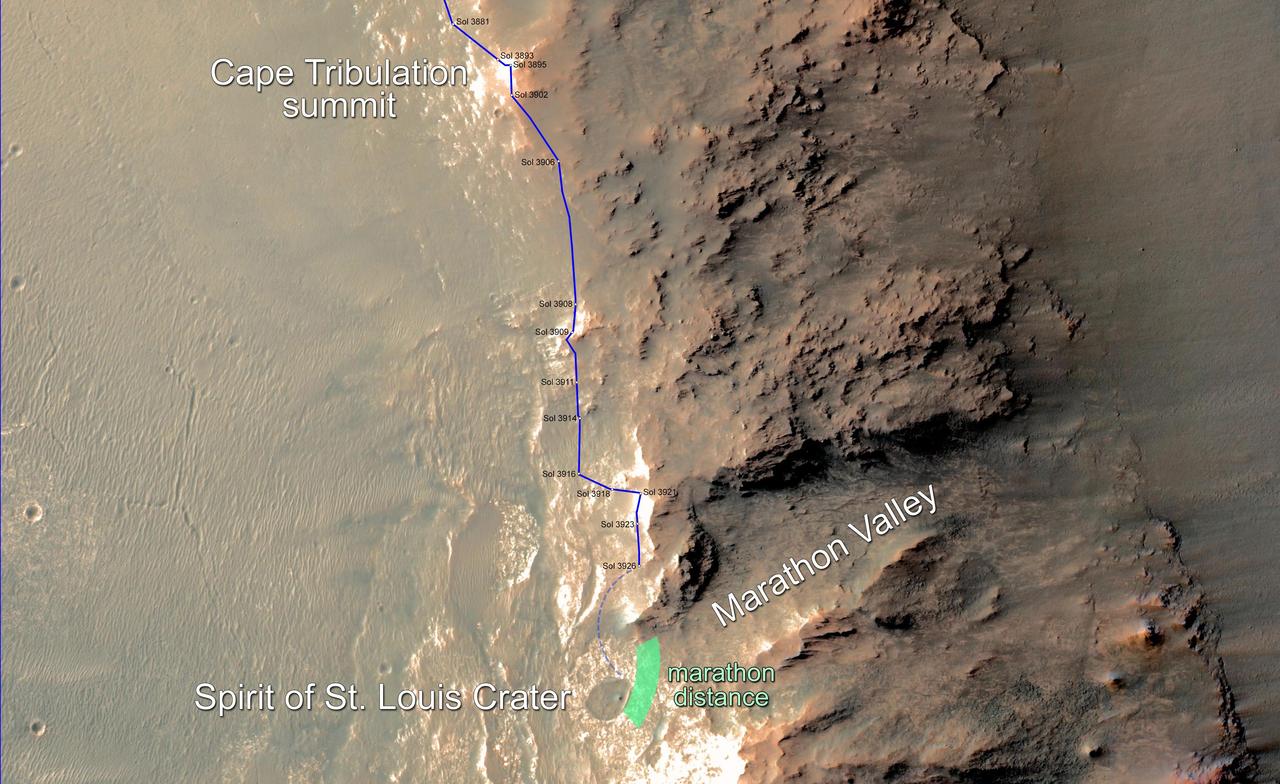
In February 2015, NASA Mars Exploration Rover Opportunity is approaching a cumulative driving distance on Mars equal to the length of a marathon race. This map shows the rover position relative to where it could surpass that distance.
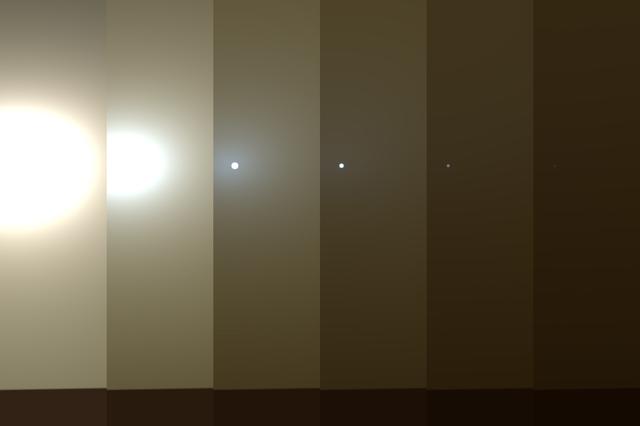
This series of images shows simulated views of a darkening Martian sky blotting out the Sun from NASA's Opportunity rover's point of view, with the right side simulating Opportunity's current view in the global dust storm (June 2018). The left starts with a blindingly bright mid-afternoon sky, with the sun appearing bigger because of brightness. The right shows the Sun so obscured by dust it looks like a pinprick. Each frame corresponds to a tau value, or measure of opacity: 1, 3, 5, 7, 9, 11. https://photojournal.jpl.nasa.gov/catalog/PIA22521

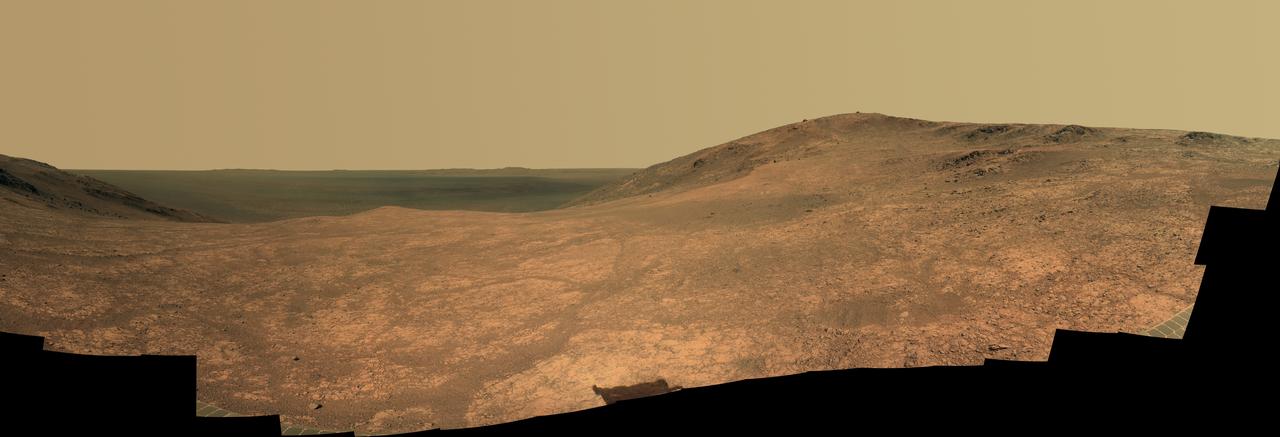
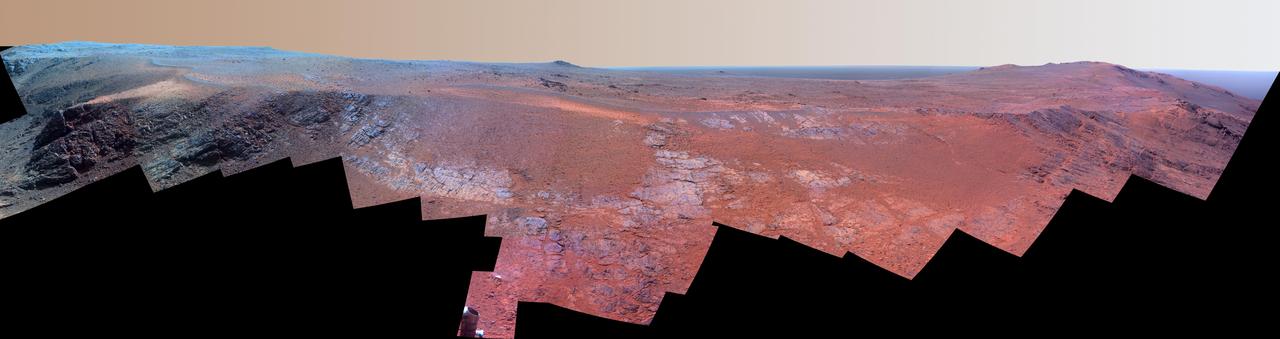
This enhanced-color view from within "Perseverance Valley," on the inner slope of the western rim of Endurance Crater on Mars, includes wheel tracks from the Opportunity rover's descent of the valley. The Panoramic Camera (Pancam) on Opportunity's mast took the component images of the scene during the period Sept. 4 through Oct. 6, 2017, corresponding to sols (Martian days) 4840 through 4871 of the rover's work on Mars. Perseverance Valley is a system of shallow troughs descending eastward about the length of two football fields from the crest of the crater rim to the floor of the crater. This panorama spans from northeast on the left to northwest on the right, including portions of the crater floor (eastward) in the left half and of the rim (westward) in the right half. Opportunity began descending Perseverance Valley in mid-2017 (see map) as part of an investigation into how the valley formed. Rover wheel tracks are darker brown, between two patches of bright bedrock, receding toward the horizon in the right half of the scene. This view combines multiple images taken through three different Pancam filters. The selected filters admit light centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). The three color bands are combined here with enhancement to make differences in surface materials easier to see. A map and full-resolution TIFF file are available at https://photojournal.jpl.nasa.gov/catalog/PIA22073

This view from within "Perseverance Valley," on the inner slope of the western rim of Endurance Crater on Mars, includes wheel tracks from the Opportunity rover's descent of the valley. The Panoramic Camera (Pancam) on Opportunity's mast took the component images of the scene during the period Sept. 4 through Oct. 6, 2017, corresponding to sols (Martian days) 4840 through 4871 of the rover's work on Mars. Perseverance Valley is a system of shallow troughs descending eastward about the length of two football fields from the crest of the crater rim to the floor of the crater. This panorama spans from northeast on the left to northwest on the right, including portions of the crater floor (eastward) in the left half and of the rim (westward) in the right half. Opportunity began descending Perseverance Valley in mid-2017 (see map) as part of an investigation into how the valley formed. Rover wheel tracks are darker brown, between two patches of bright bedrock, receding toward the horizon in the right half of the scene. This view combines multiple images taken through three different Pancam filters. The selected filters admit light centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). The three color bands are combined here to show approximately true color. A map and high-resolution TIFF file is available at https://photojournal.jpl.nasa.gov/catalog/PIA22074
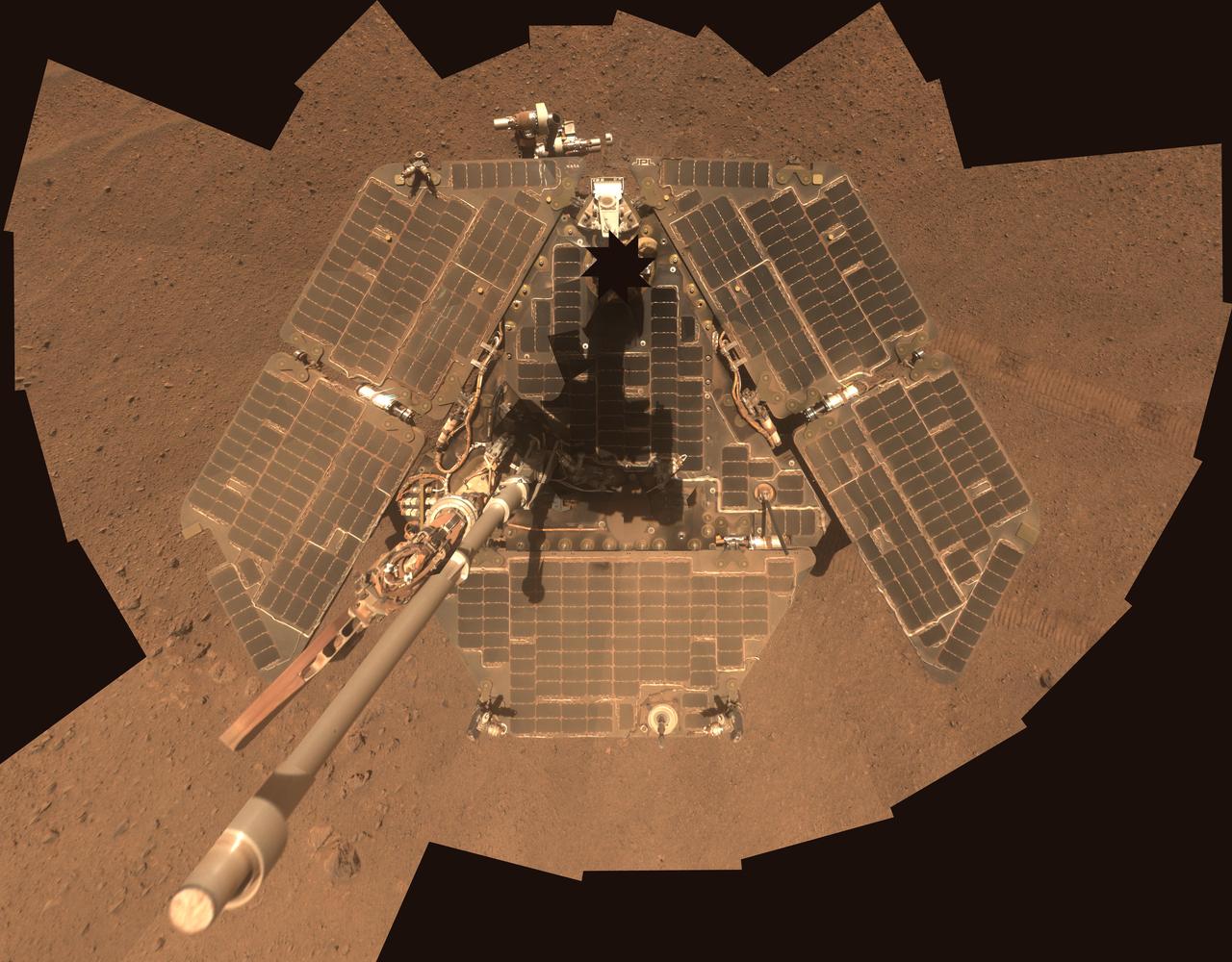
A self-portrait of NASA Mars Exploration Rover Opportunity taken by the rover panoramic camera Pancam in late March 2014 shows effects of recent winds removing much of the dust from the rover solar arrays.
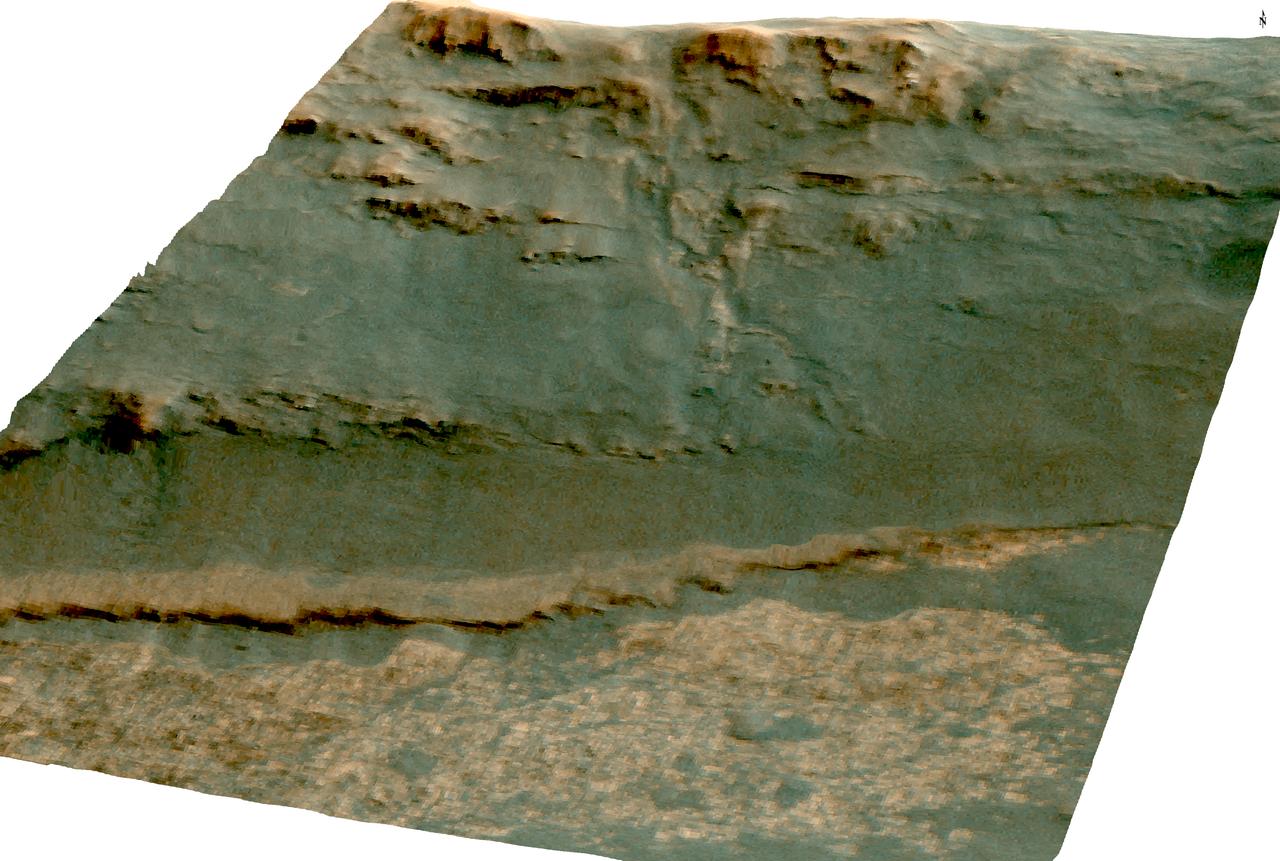
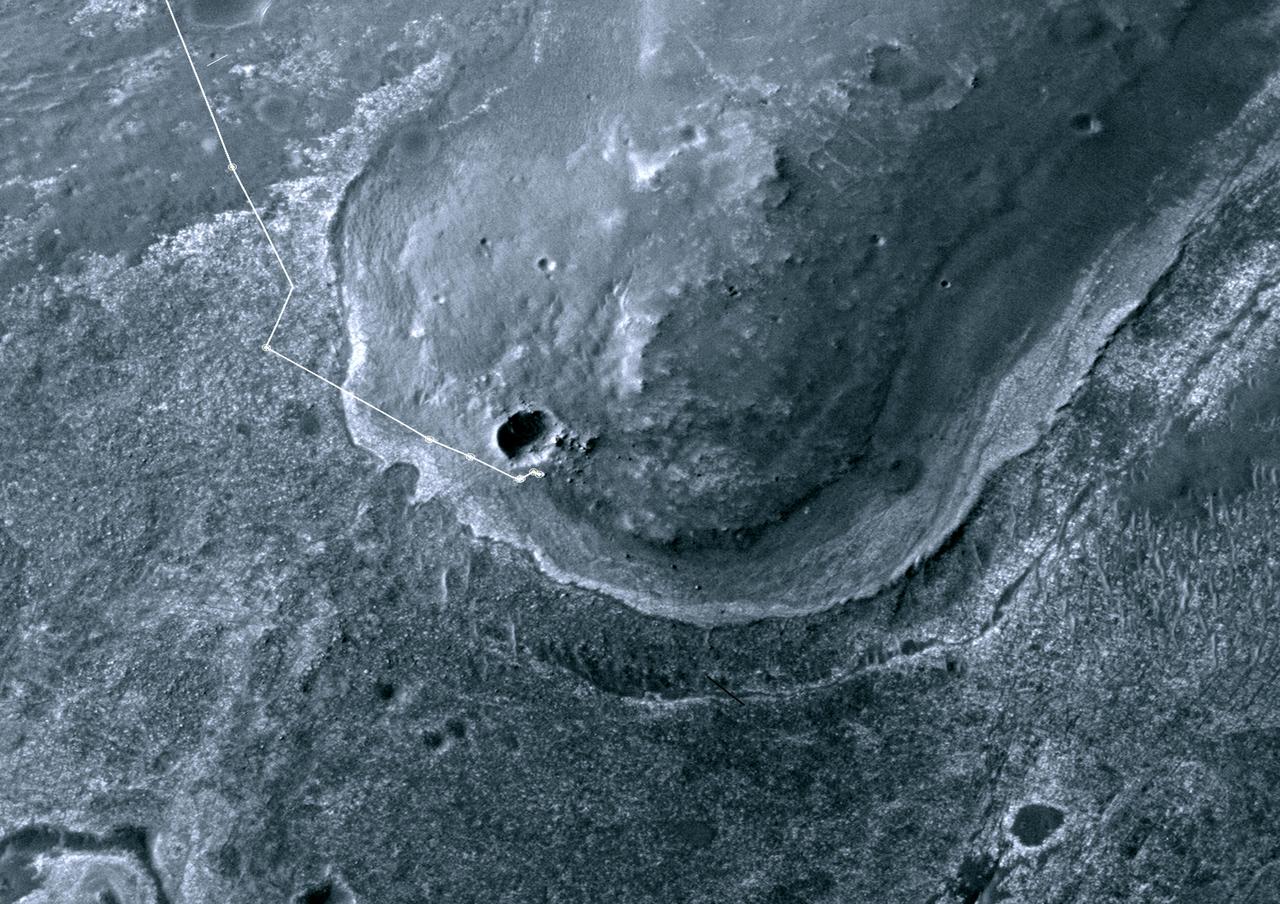
The channel descending a Martian slope in this perspective view is "Perseverance Valley," which is the study area of NASA's Mars Exploration Rover Opportunity as the rover passes its 5,000th sol, or Martian day, of its mission on the surface of Mars. The view was produced by overlaying an image take from orbit onto a topographic model with five-fold vertical exaggeration to emphasize the shapes on the rim of a large crater that have been cut by the valley on the inboard slope of the rim. The image used is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter, observation ESP_036753_1775. The crest of a portion of the western rim of Endeavour Crater is at the top of the view, and the floor of the crater is in the foreground, below an erosion-resistant bench perched beneath the valley. The crater is about 14 miles (22 kilometers) in diameter. This perspective view is from within the crater, looking westward. It spans an area about a quarter mile (400 meters) wide from left to right (south to north). The interior rim slopes about 15 to 20 degrees. Figure 1 is an annotated version indicating Perseverance Valley and the bench, plus Opportunity's locations on Sol 5,000 (Feb. 16, 2018) and on Sol 4,958 (Jan. 4, 2018). On Sol 4958, the rover took images with its Navigation Camera and its Hazard Avoidance Camera showing textures of possible stone stripes. The graphic was created at Washington University in St. Louis. A map of a slightly larger portion of the crater rim shows the location of Perseverance Valley and Opportunity's 2017 approach path. As of its Sol 5,000, Opportunity has driven 28 miles (45 kilometers) since its January 2004 landing, in what was planned as a 90-sol mission. https://photojournal.jpl.nasa.gov/catalog/PIA22216
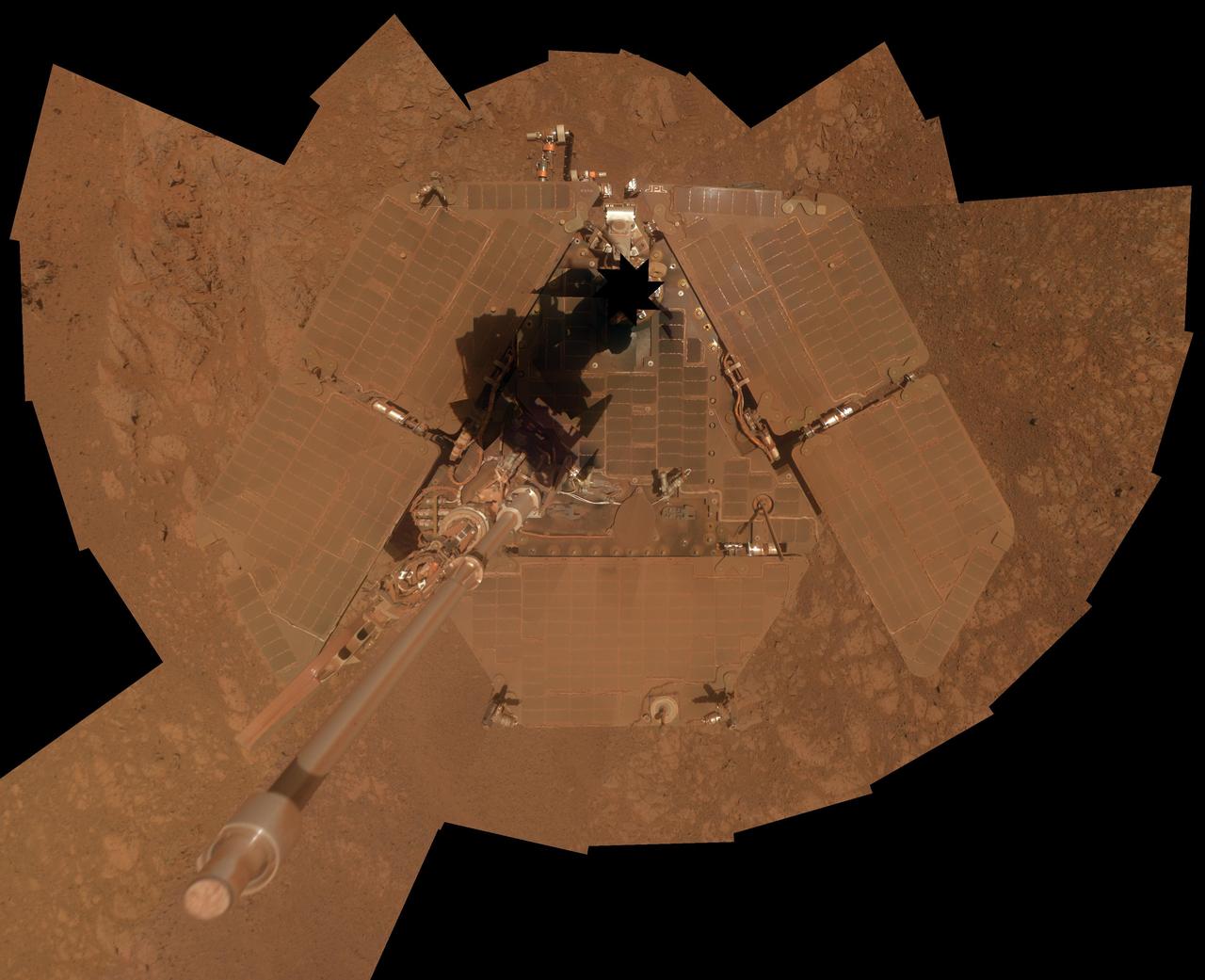
NASA Mars Exploration Rover Opportunity recorded the component images for this self-portrait about three weeks before completing a decade of work on Mars.

This scene captured by NASA Mars Exploration Rover Opportunity shows the Spirit Point area of the rim, including a small crater, Odyssey on the rim, and the interior of Endeavour beyond.
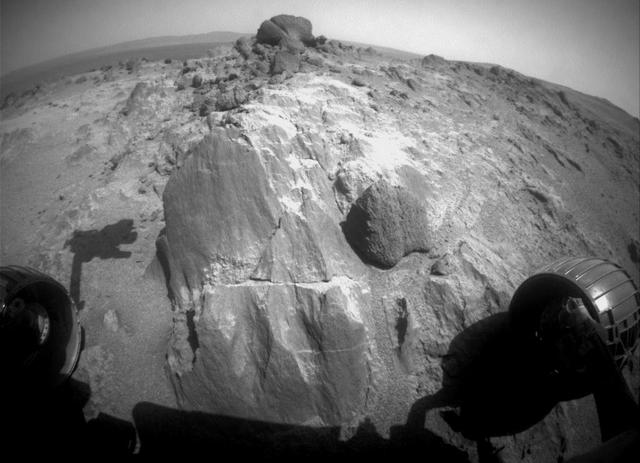
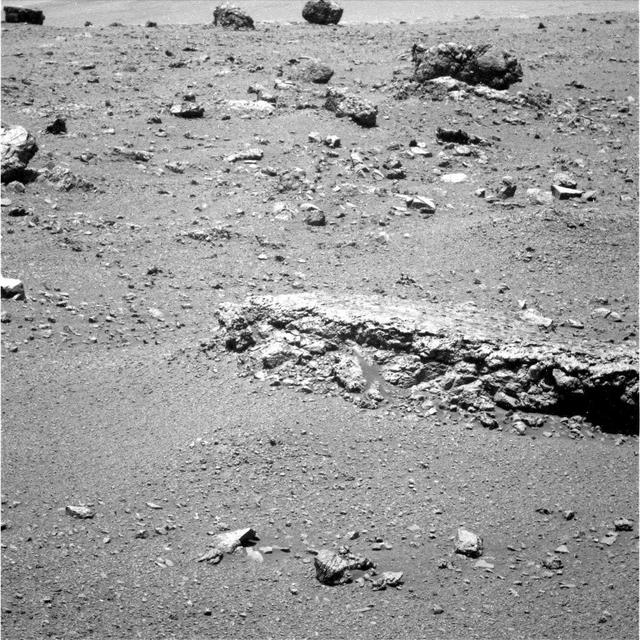
The flat-faced rock near the center of this image is a target for contact investigation by NASA's Mars Exploration Rover Opportunity in early March 2015. The view is from the rover's front hazard avoidance camera on March 3, 2015, during the 3,948th Martian day, or sol, of Opportunity's work on Mars. This camera is mounted low on the rover and has a wide-angle lens. The scene includes a shadow of the tool turret at the end of Opportunity's robotic arm. The rock includes a target called "Sergeant Charles Floyd," for the quartermaster of the Lewis and Clark expedition. http://photojournal.jpl.nasa.gov/catalog/PIA19146
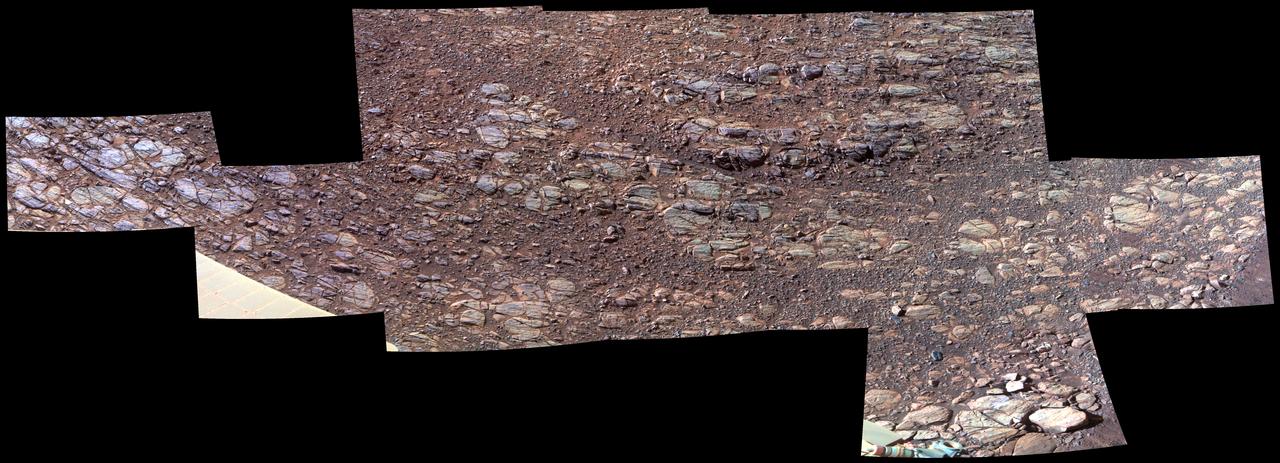
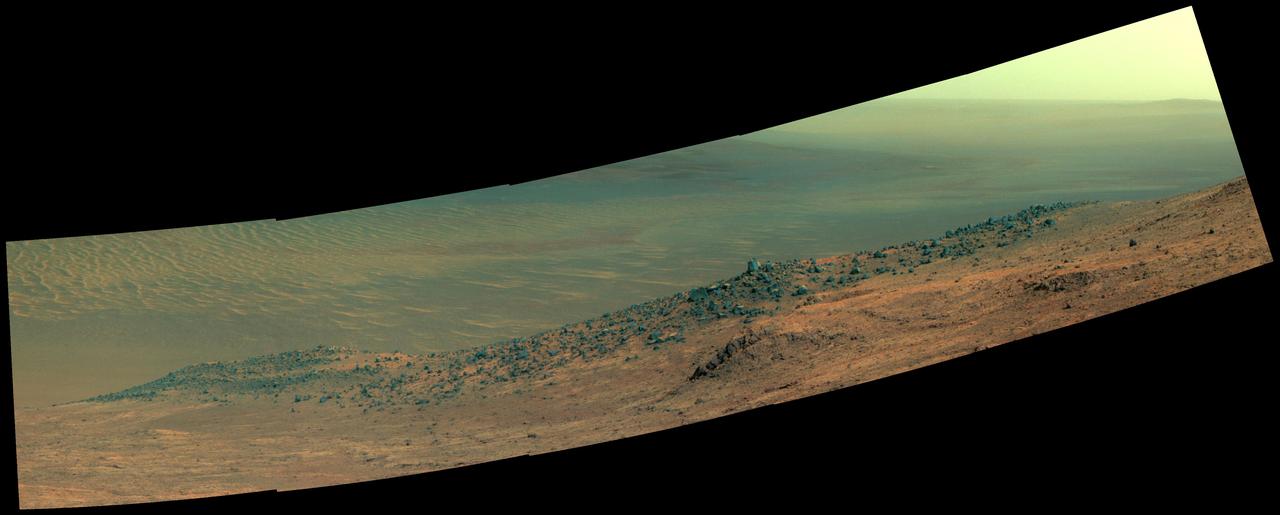
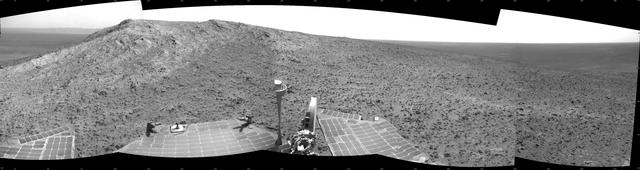
NASA's Mars Exploration Rover Opportunity took the component images of this enhanced-color scene during the mission's "walkabout" survey of an area just above the top of "Perseverance Valley," in preparation for driving down the valley. The location is just outside the crest line of the western rim of Endeavour Crater, looking toward the northwest. The rim crest at the top of Perseverance Valley is off the scene to the right. A swath across the top half of the image is lined with dark rocks, especially on the far side. The swath runs east-west, and one possible history under investigation is that it was a channel into a lake perched against the edge of the crater billions of years ago. Another hypothesis is that the linear pattern of the rock piles is related to radial fractures from the impact that excavated Endeavour Crater. One goal of the walkabout is to determine whether a close look at the rocks will provide clues to the history of the site. For scale, the width of the swath near the center of the image is roughly 30 feet (9 meters). Opportunity's panoramic camera (Pancam) recorded this scene on June 3, 2017, during the 4,749th Martian day, or sol, of the rover's work on Mars. The enhanced color helps make differences in surface materials visible. The view merges exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). https://photojournal.jpl.nasa.gov/catalog/PIA21711
This patch of rocky Martian ground on the floor of "Perseverance Valley" on the inner slope of the western rim of Endurance Crater slopes steeply downhill from left to right. Some textures seen here, including striations just above and parallel to the edge of a solar panel at far left, may be due to abrasion by wind-driven sand. Researchers interpret them as possible signs of past winds blowing from right to left, up and out of the crater, which currently hosts sand dunes on its central floor. The view spans about 11.5 feet (3.5 meters) from left to right and is presented in enhanced color to make differences in surface materials easier to see. The Panoramic Camera (Pancam) on NASA's Mars Exploration Rover Opportunity took the component images of this scene during the period Oct. 13 through Oct. 20, 2017, corresponding to sols (Martian days) 4878 through 4884 of the rover's work on Mars. Opportunity entered the upper end of Perseverance Valley in July 2017 for several months of investigating how it formed. The valley is a system of shallow troughs extending about the length of two football fields down the crater rim's steep inner slope. Endurance Crater is about 14 miles (22 kilometers) in diameter. Opportunity has been exploring features on its western rim since 2011, after investigating a series of smaller craters beginning with the one it landed in on Jan. 25, 2004, Universal Time (Jan. 24, PST). The origin of Perseverance Valley is unknown, but some observed features suggest that water might have played a role in the past. Opportunity is descending the steep valley, making observations along the way that could help illuminate the origin of this feature. The bedrock target area in this view is called "La Bajada." The image combines exposures taken through three Pancam filters, centered at wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). https://photojournal.jpl.nasa.gov/catalog/PIA22072

NASA Mars Exploration Rover Opportunity caught its own silhouette in this late-afternoon image from the rover rear HAZCAM on Mar, 20, 2014; its shadow falls across a slope called McClure-Beverlin Escarpment on the western rim of Endeavour Crater.
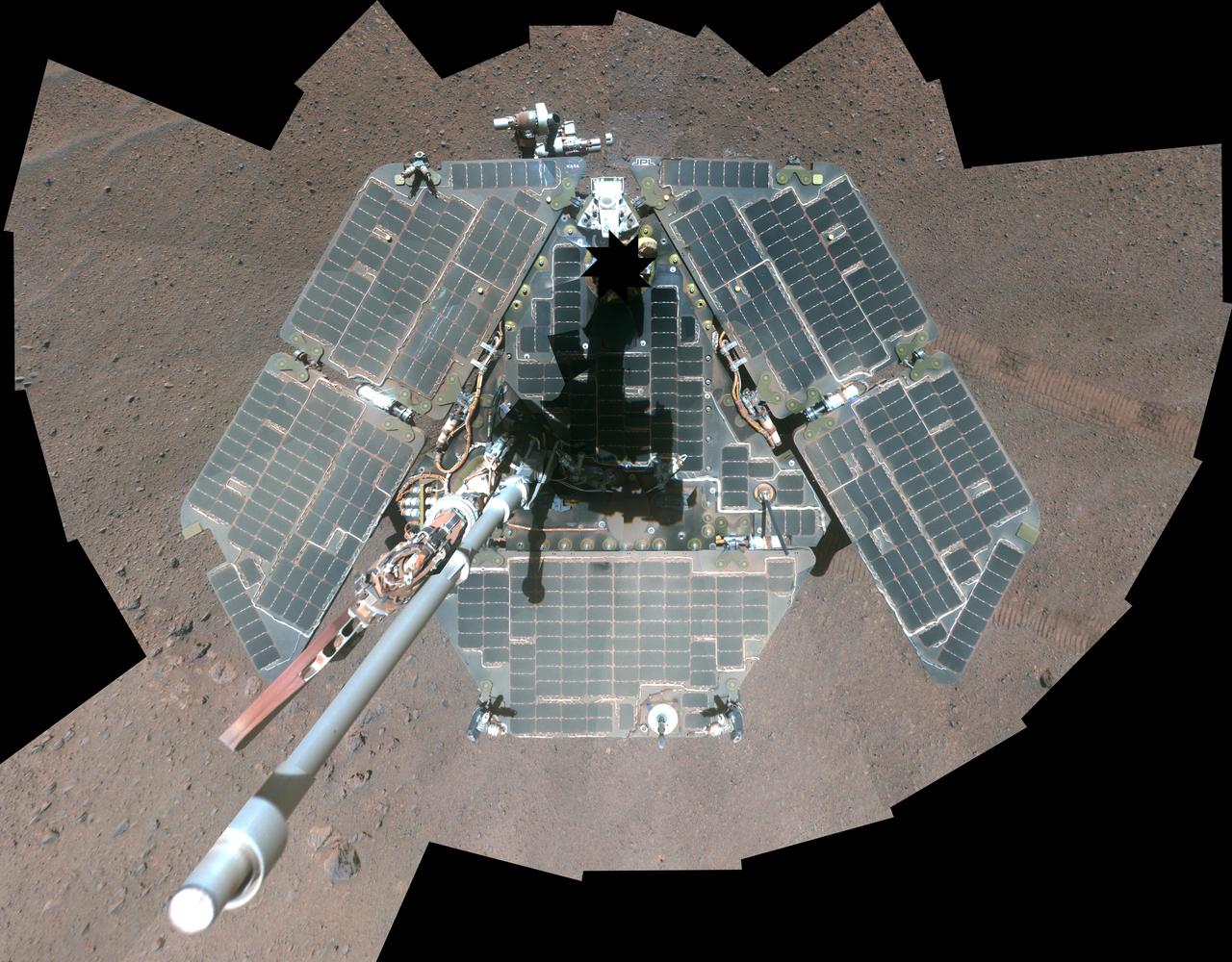
A false-color self-portrait of NASA Mars Exploration Rover Opportunity taken by the rover panoramic camera Pancam shows effects of recent winds removing much of the dust from the solar arrays.
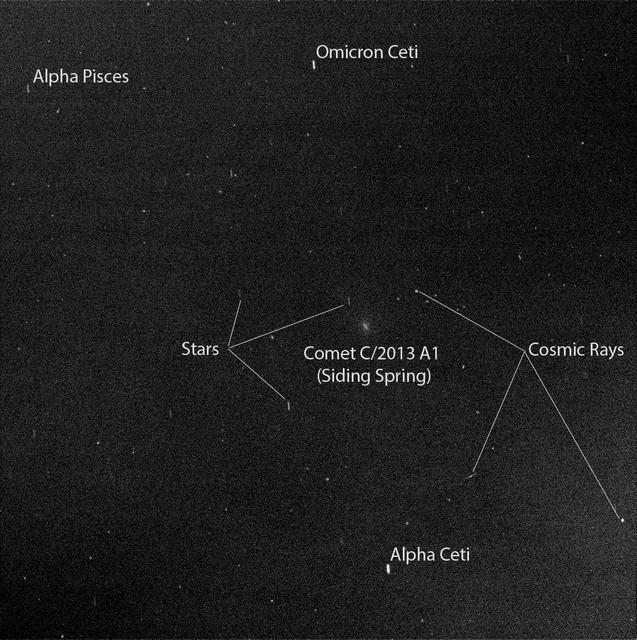
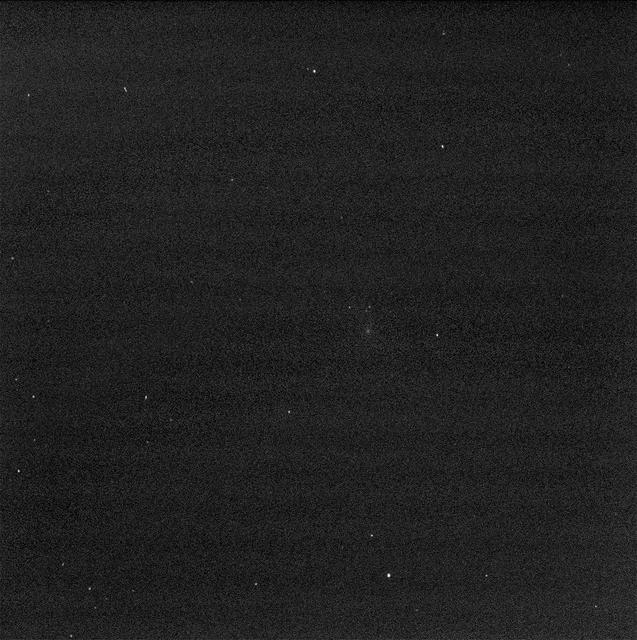
Researchers used the Pancam on NASA Mars Exploration Rover Opportunity to capture this view of comet C/2013 A1 Siding Spring as it flew near Mars on Oct. 19, 2014.
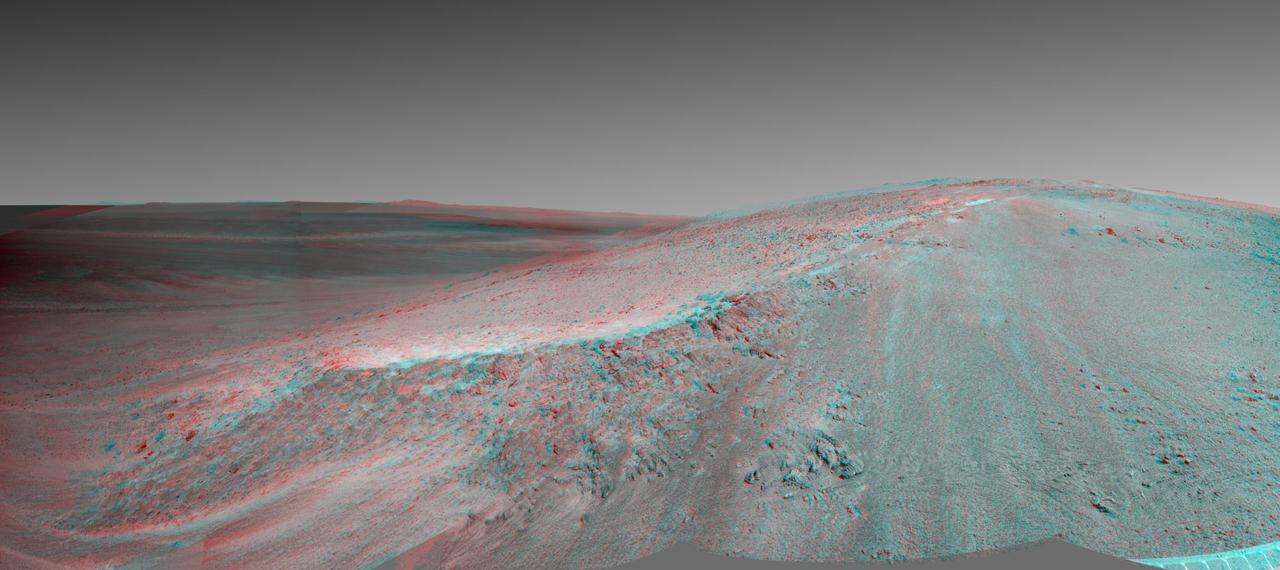
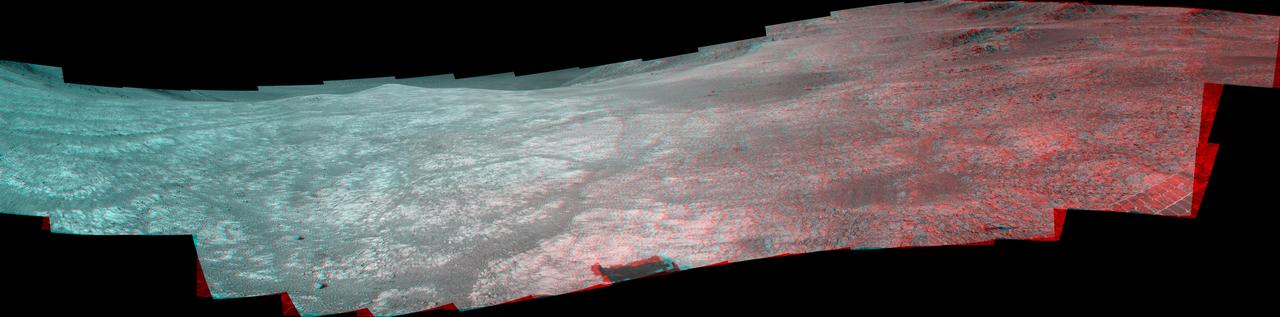
This stereo view shows the Murray Ridge portion of the western rim of Endeavour Crater on Mars. You need 3D glasses to view this image from NASA Mars Exploration Rover Opportunity.
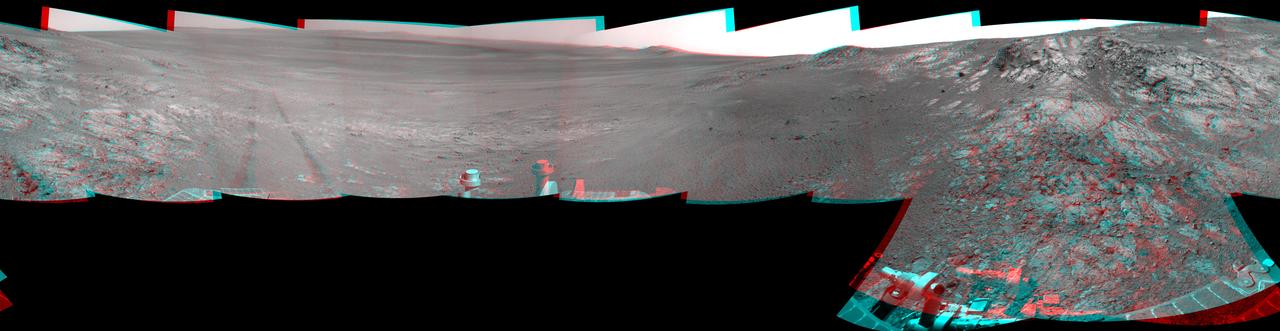
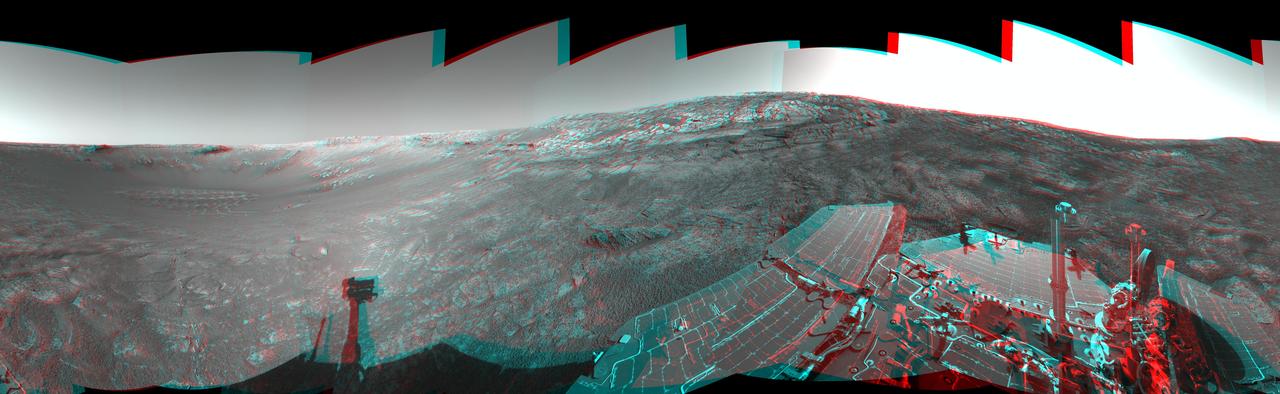
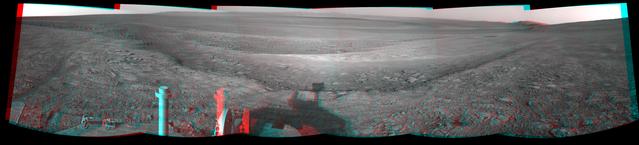
This full-circle, stereo panorama shows the terrain around the NASA Mars Exploration Rover Opportunity during the 3,105th Martian day, or sol, of the rover's work on Mars (Oct. 18, 2012). It was assembled from images taken by the rover's navigation camera. The view appears in three dimensions when viewed through red-blue glasses with the red lens on the left. South is at the center. North is on both ends. Opportunity had driven about 61 feet (18.5 meters) westward earlier on Sol 3105 to reach this location, which is on the northern portion of "Matijevic Hill" on the "Cape York" segment of the western rim of Endeavour Crater. The wheel tracks created by the drive are visible. For scale, the distance between the two parallel tracks is about 3.3 feet (1 meter). The basin of Endeavour Crater is in the left half of the image. Opportunity has been working on the western rim of Endeavour since mid-2011. The stereo panorama is presented as a cylindrical-perspective projection. http://photojournal.jpl.nasa.gov/catalog/PIA16559
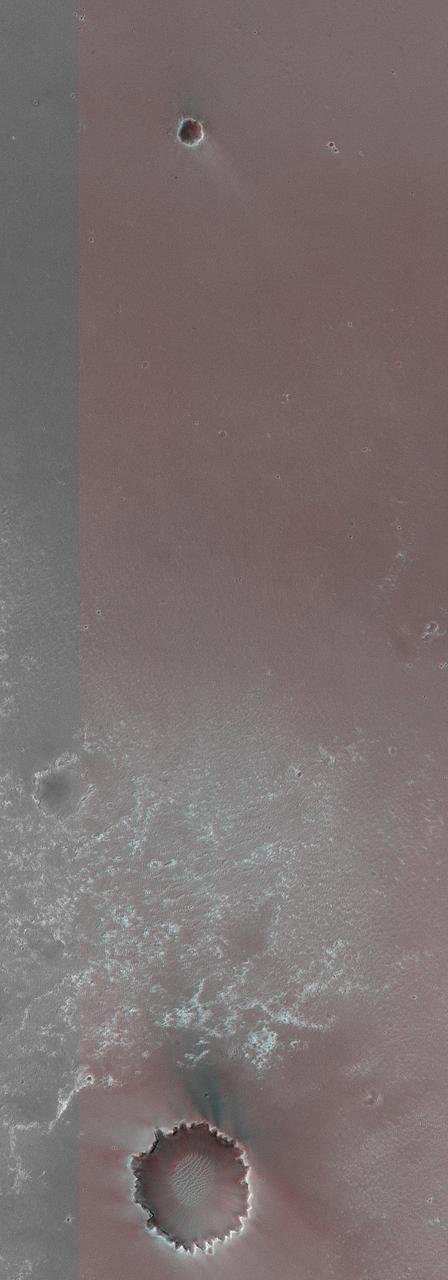
This anaglyph from NASA Mars Global Surveyor is of Meridiani Planum, the landing site of Mars Exploration Rover, Opportunity. 3D glasses are necessary to view this image.
This Martian scene shows contrasting textures and colors of "Hinners Point," at the northern edge of "Marathon Valley," and swirling reddish zones on the valley floor to the left. The view combines six frames taken by the panoramic camera (Pancam) on NASA's Mars Exploration Rover Opportunity on Aug. 14, 2015, during the 4,108th Martian day, or sol, of the rover's work on Mars. The summit takes its informal name as a tribute to Noel Hinners (1935-2014). For NASA's Apollo program, Hinners played important roles in selection of landing sites on the moon and scientific training of astronauts. He then served as NASA associate administrator for space science, director of the Smithsonian National Air and Space Museum, director of NASA's Goddard Space Flight Center, NASA chief scientist and associate deputy administrator of NASA. Subsequent to responsibility for the Viking Mars missions while at NASA, he spent the latter part of his career as vice president for flight systems at Lockheed Martin, where he had responsibility for the company's roles in development and operation of NASA's Mars Global Surveyor, Mars Reconnaissance Orbiter, Mars Odyssey, Phoenix Mars Lander, Stardust and Genesis missions. Marathon Valley cuts generally east-west through the western rim of Endeavour Crater. The valley's name refers to the distance Opportunity drove from its 2004 landing site to arrival at this location in 2014. The valley was a high-priority destination for the rover mission because observations from orbit detected clay minerals there. Dark rocks on Hinners Point show a pattern dipping downward toward the interior of Endeavour, to the right from this viewing angle. The strong dip may have resulted from the violence of the impact event that excavated the crater. Brighter rocks make up the valley floor. The reddish zones there may be areas where water has altered composition. Inspections by Opportunity have found compositions there are higher in silica and lower in iron than the typical composition of rocks on Endeavour's rim. The scene spans from west-southwest at left to northwest at right. The larger of two stones close to each other in the foreground left of center is about 5 inches (12 centimeters) wide. On bright bedrock to the right of those stones, Opportunity inspected a target informally named "Pvt. George Gibson." Another inspected target, "Pvt. Silas Goodrich," is on the valley floor near the left edge of this scene. The informal names for these targets refer to members of the Lewis and Clark expedition's Corps of Discovery. This version of the image is presented in approximate true color by combing exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). http://photojournal.jpl.nasa.gov/catalog/PIA19819

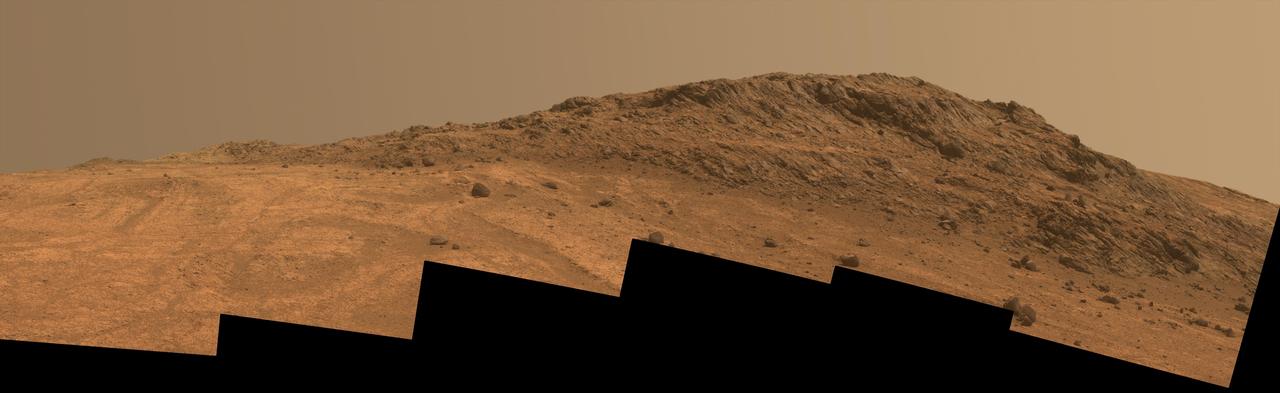
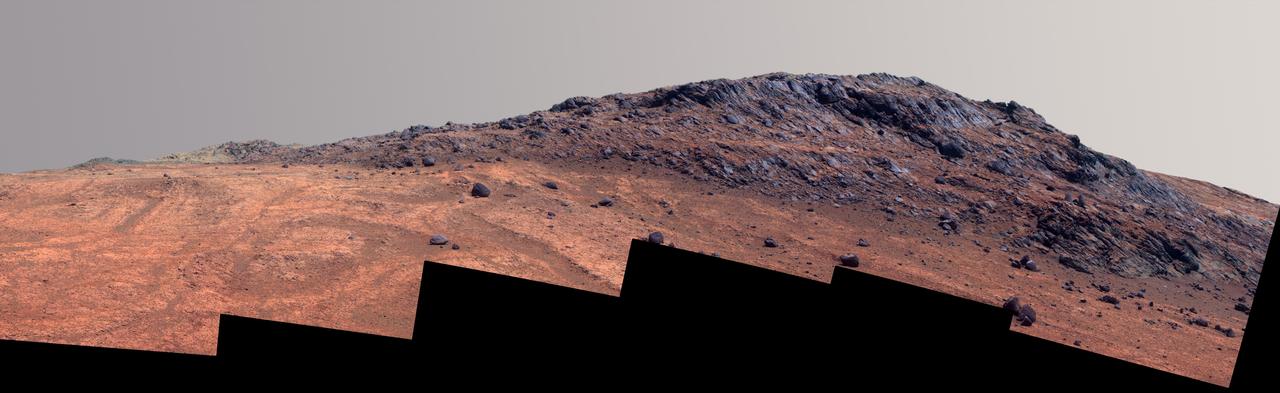
A ridge called "Rocheport" on the western rim of Mars' Endeavour Crater spans this mosaic of images from the panoramic camera (Pancam) on NASA's Mars Exploration Rover Opportunity. The view extends from south-southeast on the left to north on the right. Rocheport is near the southern end of an Endeavour rim segment called "Cape Tribulation." The Pancam took the component images for this panorama on Feb. 25, 2017, during the 4,654th Martian day, or sol, of Opportunity's work on Mars. Opportunity began exploring the western rim of Endeavour Crater in 2011 and reached the north end of Cape Tribulation in 2014. This ridge bears some grooves on its side, such as between the two dark shoulders angling down near the left edge of the scene. For scale, those shoulders are about 10 to 16 feet (3 to 5 meters) long. The grooves might have been carved long ago by water or ice or wind. The view merges exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). It is presented in approximately true color. The Rocheport name comes from a riverbank town in Missouri along the route of Lewis and Clark's "Corps of Discovery" Expedition. https://photojournal.jpl.nasa.gov/catalog/PIA21493
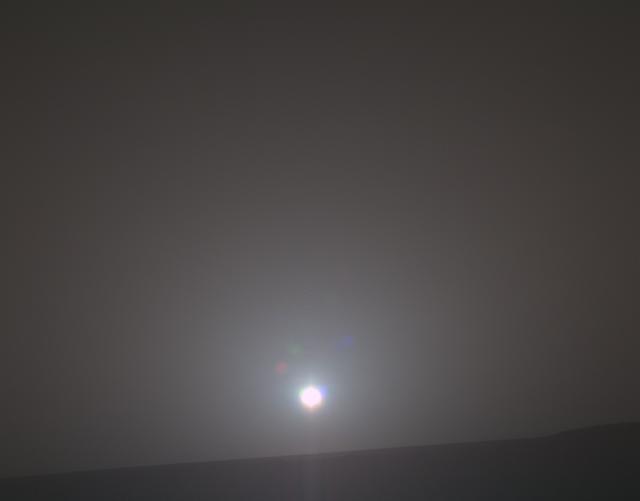
NASA's Mars Exploration Rover Opportunity recorded the dawn of the rover's 4,999th Martian day, or sol, with its Panoramic Camera (Pancam) on Feb. 15, 2018, yielding this processed, approximately true-color scene. The view looks across Endeavour Crater, which is about 14 miles (22 kilometers) in diameter, from the inner slope of the crater's western rim. Opportunity has driven a little over 28.02 miles (45.1 kilometers) since it landed in the Meridiani Planum region of Mars in January, 2004, for what was planned as a 90-sol mission. A sol lasts about 40 minutes longer than an Earth day. This view combines three separate Pancam exposures taken through filters centered on wavelengths of 601 microns (red), 535 microns (green) and 482 microns (blue). It was processed at Texas A&M University to correct for some of the oversaturation and glare, though it still includes some artifacts from pointing a camera with a dusty lens at the Sun. The processing includes radiometric correction, interpolation to fill in gaps in the data caused by saturation due to Sun's brightness, and warping the red and blue images to undo the effects of time passing between each of the exposures through different filters. https://photojournal.jpl.nasa.gov/catalog/PIA22221
"Marathon Valley" on Mars opens northeastward to a view across the floor of Endeavour Crater in this scene from the panoramic camera (Pancam) of NASA's Mars Exploration Rover Opportunity. The scene merges multiple Pancam exposures taken during the period April 16 through May 15, 2016, corresponding to sols (Martian days) 4,347 through 4,375 of Opportunity's work on Mars. It spans from north, at the left, to west-southwest, at the right. The high point in the right half of the scene is "Knudsen Ridge," which forms part of the southern edge of Marathon Valley. Portions of the northeastern and eastern rim of Endeavour crater appear on the distant horizon. Endeavour Crater is 14 miles (22 kilometers) in diameter. The fractured texture of Marathon Valley's floor is visible in the foreground. The view merges exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). It is presented in approximately true color. The rover team calls this image the mission's "Sacagawea Panorama," for the Lemhi Shoshone woman, also commemorated on U.S. dollar coins, whose assistance to the Lewis and Clark expedition helped enable its successes in 1804-1806. Many rocks and other features in Marathon Valley were informally named for members of Lewis and Clark's "Corps of Discovery" expedition. Opportunity entered Marathon Valley in July 2015. The valley's informal name was chosen because Opportunity's arrival at this point along the western rim of Endeavour Crater coincided closely with the rover surpassing marathon-footrace distance in its total driving odometry since landing on Mars in January 2004. The team's planned investigations in the valley were nearing completion when the component images for this scene were taken. http://photojournal.jpl.nasa.gov/catalog/PIA20749
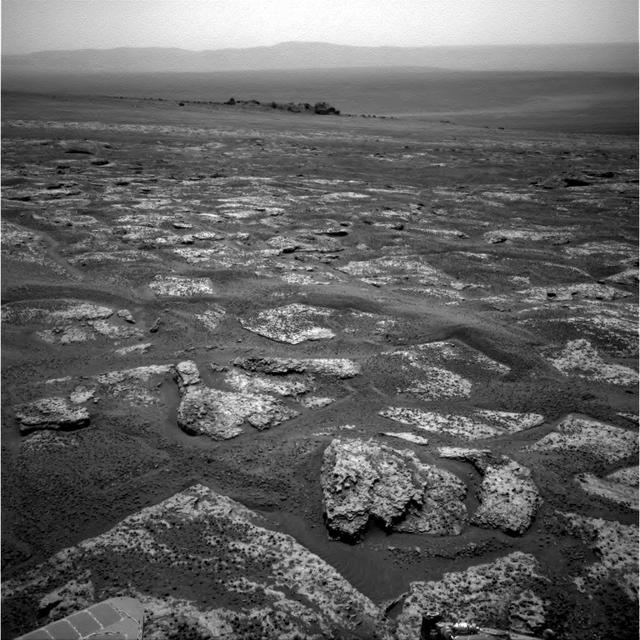
This late-afternoon view from the front Hazard Avoidance Camera on NASA's Mars Exploration Rover Opportunity shows a pattern of rock stripes on the ground, a surprise to scientists on the rover team. Approaching the 5,000th Martian day or sol, of what was planned as a 90-sol mission, Opportunity is still providing new discoveries. This image was taken inside "Perseverance Valley," on the inboard slope of the western rim of Endeavour Crater, on Sol 4958 (Jan. 4, 2018). Both this view and one taken the same sol by the rover's Navigation Camera look downhill toward the northeast from about one-third of the way down the valley, which extends about the length of two football fields from the crest of the rim toward the crater floor. The lighting, with the Sun at a low angle, emphasizes the ground texture, shaped into stripes defined by rock fragments. The stripes are aligned with the downhill direction. The rock to the upper right of the rover's robotic arm is about 2 inches (5 centimeters) wide and about 3 feet (1 meter) from the centerline of the rover's two front wheels. This striped pattern resembles features seen on Earth, including on Hawaii's Mauna Kea, that are formed by cycles of freezing and thawing of ground moistened by melting ice or snow. There, fine-grained fraction of the soil expands as it freezes, and this lifts the rock fragments up and to the sides. If such a process formed this pattern in Perseverance Valley, those conditions might have been present locally during a period within the past few million years when Mars' spin axis was at a greater tilt than it is now, and some of the water ice now at the poles was redistributed to lower latitudes. Other hypotheses for how these features formed are also under consideration, including high-velocity slope winds. https://photojournal.jpl.nasa.gov/catalog/PIA22218
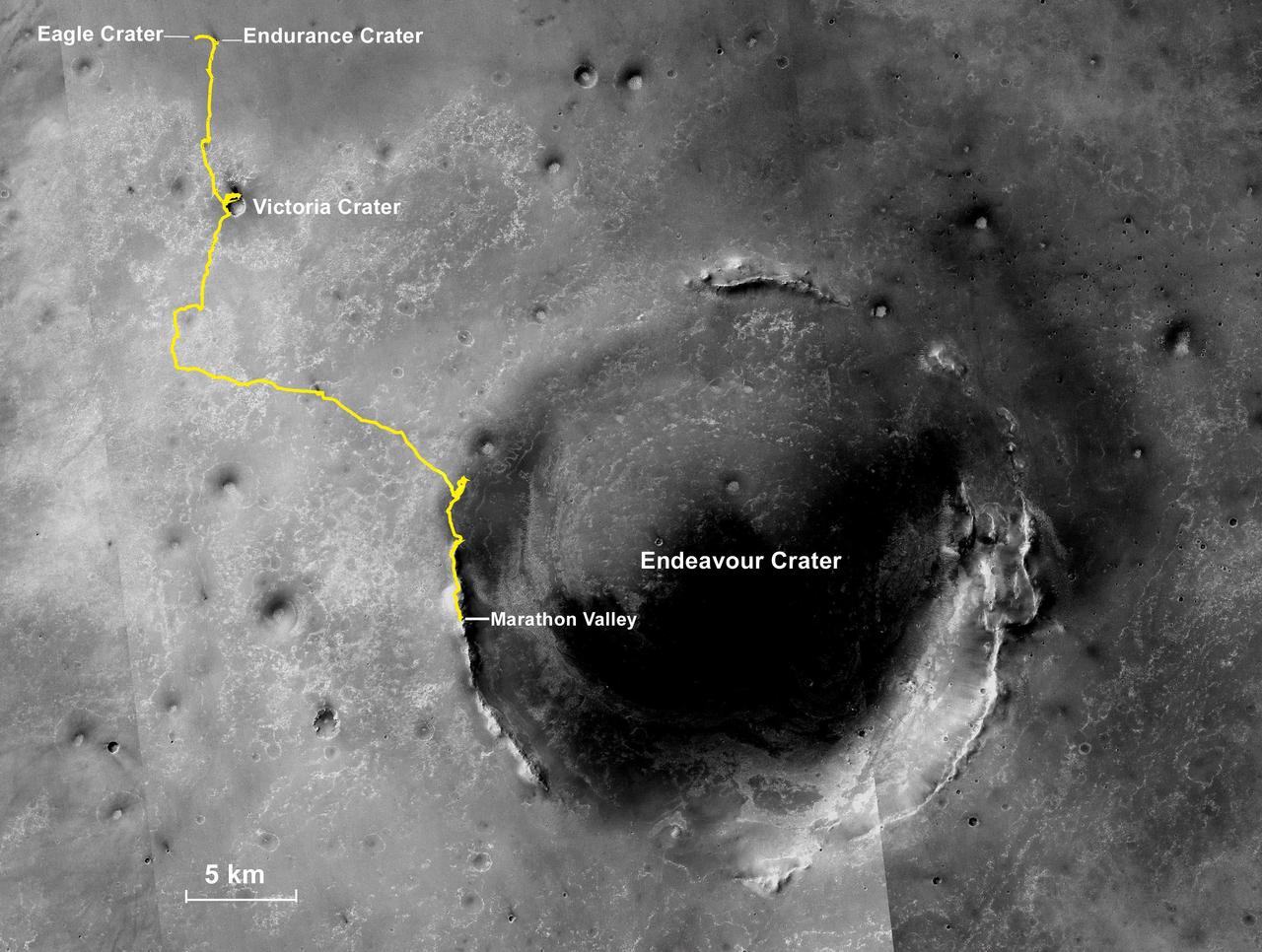
NASA's Mars Exploration Rover Opportunity, working on Mars since January 2004, passed marathon distance in total driving on March 24, 2015, during the mission's 3,968th Martian day, or sol. A drive of 153 feet (46.5 meters) on Sol 3968 brought Opportunity's total odometry to 26.221 miles (42.198 kilometers). Olympic marathon distance is 26.219 miles (42.195 kilometers). The gold line on this image shows Opportunity's route from the landing site inside Eagle Crater, in upper left, to its location after the Sol 3968 drive. The mission has been investigating on the western rim of Endeavour Crater since August 2011. This crater spans about 14 miles (22 kilometers) in diameter. The mapped area is all within the Meridiani Planum region of equatorial Mars, which was chosen as Opportunity's landing area because of earlier detection of the mineral hematite from orbit. North is up. The base image for the map is a mosaic of images taken by the Context Camera on NASA's Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA19154
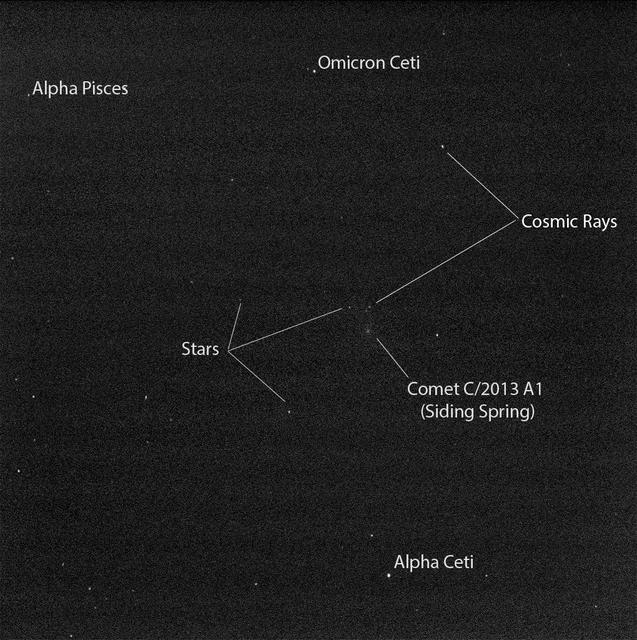
Researchers used the Pancam on NASA Mars Exploration Rover Opportunity to capture this view of comet C/2013 A1 Siding Spring as it flew near Mars on Oct. 19, 2014.
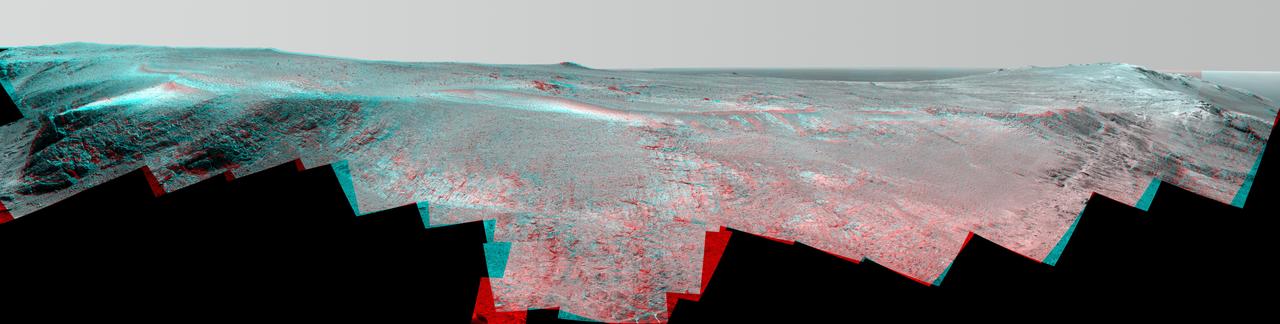
"Marathon Valley" on Mars opens northeastward in this stereo scene from the panoramic camera (Pancam) of NASA's Mars Exploration Rover Opportunity. The image combines views from the left eye and right eye of the Pancam to appear three-dimensional when seen through blue-red glasses with the red lens on the left. The component images were taken during the period April 16 through May 15, 2016, corresponding to sols (Martian days) 4,347 through 4,375 of Opportunity's work on Mars. The vista spans from north, at the left, to west-southwest, at the right. The high point in the right half of the scene is "Knudsen Ridge," which forms part of the southern edge of Marathon Valley. The fractured texture of Marathon Valley's floor is visible in the foreground. The rover team calls this image the mission's "Sacagawea Panorama," for the Lemhi Shoshone woman, also commemorated on U.S. dollar coins, whose assistance to the Lewis and Clark expedition helped enable its successes in 1804-1806. Many rocks and other features in Marathon Valley were informally named for members of Lewis and Clark's "Corps of Discovery" expedition. Opportunity entered Marathon Valley in July 2015. The valley's informal name was chosen because Opportunity's arrival at this point along the western rim of Endeavour Crater coincided closely with the rover surpassing marathon-footrace distance in its total driving odometry since landing on Mars in January 2004. The team's planned investigations in the valley were nearing completion when the component images for this scene were taken. http://photojournal.jpl.nasa.gov/catalog/PIA20751
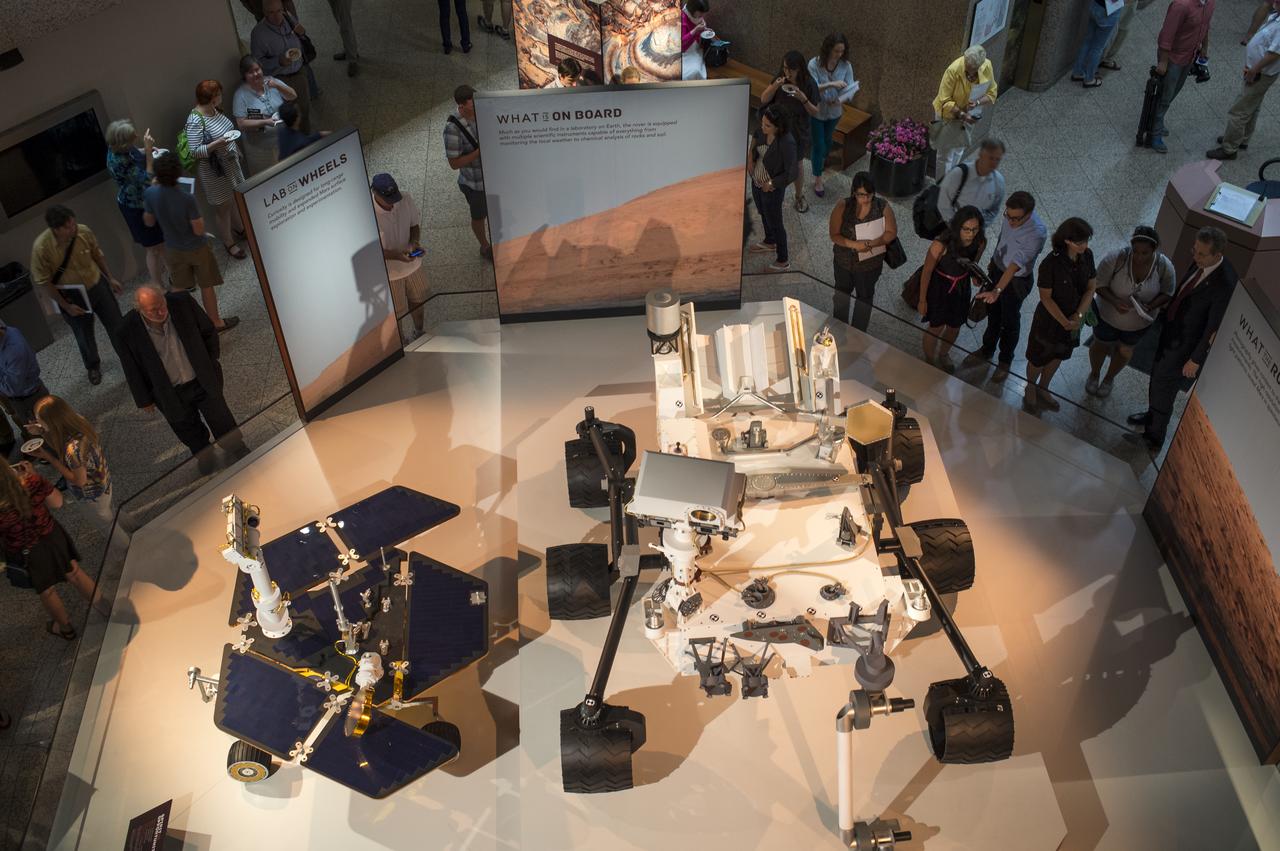
Guest attending the National Geographic “Mars Up Close” panel discussion, look at full scale models of the Spirit/Opportunity, left, and Curiosity, Mars rovers, Tuesday, August 5, 2014, at the National Geographic Society headquarters in Washington. Guest listened to a panel of distinguished space scientists and Mars experts involved in current Mars exploration that shared what we’ve learned from Curiosity and the other Mars rovers. Photo Credit: (NASA/Bill Ingalls)
A ridge called "Rocheport" on the western rim of Mars' Endeavour Crater spans this stereo scene from the panoramic camera (Pancam) on NASA's Mars Exploration Rover Opportunity. The mosaic combines views from the left eye and right eye of the Pancam to appear three-dimensional when seen through blue-red glasses with the red lens on the left. The view extends from south-southeast on the left to north on the right. Rocheport is near the southern end of an Endeavour rim segment called "Cape Tribulation." The Pancam took the component images for this panorama on Feb. 25, 2017, during the 4,654th Martian day, or sol, of Opportunity's work on Mars. Opportunity began exploring the western rim of Endeavour Crater in 2011 and reached the north end of Cape Tribulation in 2014. This ridge bears some grooves on its side, such as between the two dark shoulders angling down near the left edge of the scene. For scale, those shoulders are about 10 to 16 feet (3 to 5 meters) long. The grooves might have been carved long ago by water or ice or wind. The Rocheport name comes from a riverbank town in Missouri along the route of Lewis and Clark's "Corps of Discovery" Expedition. https://photojournal.jpl.nasa.gov/catalog/PIA21491

On Launch Complex 17-B, Cape Canaveral Air Force Station, the Delta II Heavy launch vehicle carrying the rover "Opportunity" for the second Mars Exploration Rover mission launches at 11:18:15 p.m. EDT. Opportunity will reach Mars on Jan. 25, 2004. Together the two MER rovers, Spirit (launched June 10) and Opportunity, seek to determine the history of climate and water at two sites on Mars where conditions may once have been favorable to life. The rovers are identical. They will navigate themselves around obstacles as they drive across the Martian surface, traveling up to about 130 feet each Martian day. Each rover carries five scientific instruments including a panoramic camera and microscope, plus a rock abrasion tool that will grind away the outer surfaces of rocks to expose their interiors for examination. Each rover’s prime mission is planned to last three months on Mars.

On Launch Complex 17-B, Cape Canaveral Air Force Station, the Delta II Heavy launch vehicle carrying the rover "Opportunity" for the second Mars Exploration Rover mission launches at 11:18:15 p.m. EDT. Opportunity will reach Mars on Jan. 25, 2004. Together the two MER rovers, Spirit (launched June 10) and Opportunity, seek to determine the history of climate and water at two sites on Mars where conditions may once have been favorable to life. The rovers are identical. They will navigate themselves around obstacles as they drive across the Martian surface, traveling up to about 130 feet each Martian day. Each rover carries five scientific instruments including a panoramic camera and microscope, plus a rock abrasion tool that will grind away the outer surfaces of rocks to expose their interiors for examination. Each rover’s prime mission is planned to last three months on Mars.
This Martian scene shows contrasting textures and colors of "Hinners Point," at the northern edge of "Marathon Valley," and swirling reddish zones on the valley floor to the left. In this version of the image, the landscape is presented in enhanced color to make differences in surface materials more easily visible. The summit takes its informal name as a tribute to Noel Hinners (1935-2014). For NASA's Apollo program, Hinners played important roles in selection of landing sites on the moon and scientific training of astronauts. He then served as NASA associate administrator for space science, director of the Smithsonian National Air and Space Museum, director of NASA's Goddard Space Flight Center, NASA chief scientist and associate deputy administrator of NASA. Subsequent to responsibility for the Viking Mars missions while at NASA, he spent the latter part of his career as vice president for flight systems at Lockheed Martin, where he had responsibility for the company's roles in development and operation of NASA's Mars Global Surveyor, Mars Reconnaissance Orbiter, Mars Odyssey, Phoenix Mars Lander, Stardust and Genesis missions. Marathon Valley cuts generally east-west through the western rim of Endeavour Crater. The valley's name refers to the distance Opportunity drove from its 2004 landing site to arrival at this location in 2014. The valley was a high-priority destination for the rover mission because observations from orbit detected clay minerals there. Dark rocks on Hinners Point show a pattern dipping downward toward the interior of Endeavour, to the right from this viewing angle. The strong dip may have resulted from the violence of the impact event that excavated the crater. Brighter rocks make up the valley floor. The reddish zones there may be areas where water has altered composition. Inspections by Opportunity have found compositions there are higher in silica and lower in iron than the typical composition of rocks on Endeavour's rim. The scene spans from west-southwest at left to northwest at right. The larger of two stones close to each other in the foreground left of center is about 5 inches (12 centimeters) wide. On bright bedrock to the right of those stones, Opportunity inspected a target informally named "Pvt. George Gibson." Another inspected target, "Pvt. Silas Goodrich," is on the valley floor near the left edge of this scene. The informal names for these targets refer to members of the Lewis and Clark expedition's Corps of Discovery. The image combines exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). http://photojournal.jpl.nasa.gov/catalog/PIA19820
This scene from NASA's Mars Exploration Rover Opportunity shows "Wharton Ridge," which forms part of the southern wall of "Marathon Valley" on the western rim of Endeavour Crater. The full extent of Wharton Ridge is visible, with the floor of Endeavour Crater beyond it and the far wall of the crater in the distant background. Near the right edge of the scene is "Lewis and Clark Gap," through which Opportunity crossed from Marathon Valley to "Bitterroot Valley" in September 2016. Before the rover departed Marathon Valley, its panoramic camera (Pancam) acquired the component images for this scene on Aug. 30, 2016, during the 4,480th Martian day, or sol, of Opportunity's work on Mars. Opportunity's science team chose the ridge's name to honor the memory of Robert A. Wharton (1951-2012), an astrobiologist who was a pioneer in the use of terrestrial analog environments, particularly in Antarctica, to study scientific problems connected to the habitability of Mars. Over the course of his career, he was a visiting senior scientist at NASA Headquarters, vice president for research at the Desert Research Institute, provost at Idaho State University, and president of the South Dakota School of Mines and Technology. The view spans from east-northeast at left to southeast at right. It merges exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). It is presented in approximately true color. http://photojournal.jpl.nasa.gov/catalog/PIA20849
A ridge called "Rocheport" on the western rim of Mars' Endeavour Crater spans this mosaic of images from the panoramic camera (Pancam) on NASA's Mars Exploration Rover Opportunity. In this version of the scene the landscape is presented in enhanced color to make differences in surface materials more easily visible. The view extends from south-southeast on the left to north on the right. Rocheport is near the southern end of an Endeavour rim segment called "Cape Tribulation." The Pancam took the component images for this panorama on Feb. 25, 2017, during the 4,654th Martian day, or sol, of Opportunity's work on Mars. Opportunity began exploring the western rim of Endeavour Crater in 2011 and reached the north end of Cape Tribulation in 2014. This ridge bears some grooves on its side, such as between the two dark shoulders angling down near the left edge of the scene. For scale, those shoulders are about 10 to 16 feet (3 to 5 meters) long. The grooves might have been carved long ago by water or ice or wind. The Rocheport name comes from a riverbank town in Missouri along the route of Lewis and Clark's "Corps of Discovery" Expedition. The view merges exposures taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). https://photojournal.jpl.nasa.gov/catalog/PIA21492
This two-image blink shows a comparison of two exposure times in images from the panoramic camera Pancam on NASA Mars Exploration Rover Opportunity showing comet C/2013 A1 Siding Spring as it flew near Mars on Oct. 19, 2014.

"Marathon Valley" on Mars opens northeastward to a view across the floor of Endeavour Crater in this scene from the panoramic camera (Pancam) of NASA's Mars Exploration Rover Opportunity. In this version of the scene the landscape is presented in enhanced color to make differences in surface materials more easily visible. The panorama merges multiple Pancam exposures taken during the period April 16 through May 15, 2016, corresponding to sols (Martian days) 4,347 through 4,375 of Opportunity's work on Mars. It spans from north, at the left, to west-southwest, at the right. The high point in the right half of the scene is "Knudsen Ridge," which forms part of the southern edge of Marathon Valley. Portions of the northeastern and eastern rim of Endeavour crater appear on the distant horizon. Endeavour Crater is 14 miles (22 kilometers) in diameter. The fractured texture of Marathon Valley's floor is visible in the foreground. The rover team calls this image the mission's "Sacagawea Panorama," for the Lemhi Shoshone woman, also commemorated on U.S. dollar coins, whose assistance to the Lewis and Clark expedition helped enable its successes in 1804-1806. Many rocks and other features in Marathon Valley were informally named for members of Lewis and Clark's "Corps of Discovery" expedition. Opportunity entered Marathon Valley in July 2015. The valley's informal name was chosen because Opportunity's arrival at this point along the western rim of Endeavour Crater coincided closely with the rover surpassing marathon-footrace distance in its total driving odometry since landing on Mars in January 2004. The team's planned investigations in the valley were nearing completion when the component images for this scene were taken. http://photojournal.jpl.nasa.gov/catalog/PIA20750
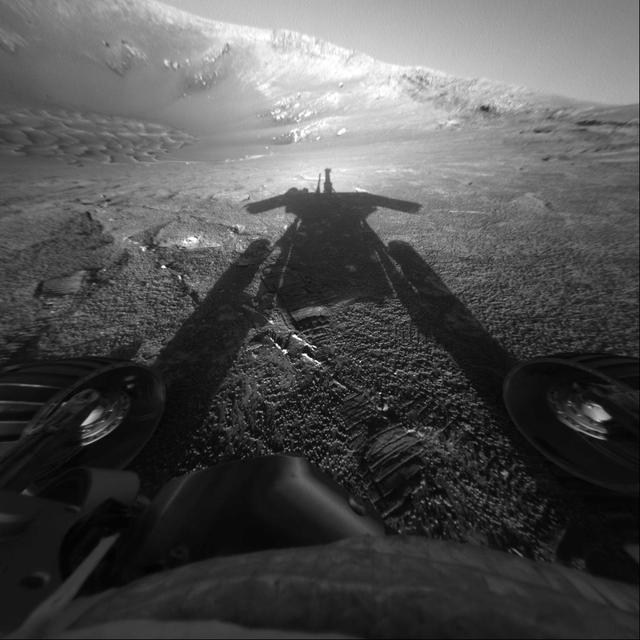
This self-portrait of NASA Mars Exploration Rover Opportunity comes courtesy of the Sun and the rover front hazard-avoidance camera. The dramatic snapshot of Opportunity shadow was taken as the rover continues to move farther into Endurance Crater
This scene from NASA's Mars Exploration Rover Opportunity shows "Wharton Ridge," which forms part of the southern wall of "Marathon Valley" on the western rim of Endeavour Crater. In this version of the scene the landscape is presented in enhanced color to make differences in surface materials more easily visible The full extent of Wharton Ridge is visible, with the floor of Endeavour Crater beyond it and the far wall of the crater in the distant background. Near the right edge of the scene is "Lewis and Clark Gap," through which Opportunity crossed from Marathon Valley to "Bitterroot Valley" in September 2016. Before the rover departed Marathon Valley, its panoramic camera (Pancam) acquired the component images for this scene on Aug. 30, 2016, during the 4,480th Martian day, or sol, of Opportunity's work on Mars. Opportunity's science team chose the ridge's name to honor the memory of Robert A. Wharton (1951-2012), an astrobiologist who was a pioneer in the use of terrestrial analog environments, particularly in Antarctica, to study scientific problems connected to the habitability of Mars. Over the course of his career, he was a visiting senior scientist at NASA Headquarters, vice president for research at the Desert Research Institute, provost at Idaho State University, and president of the South Dakota School of Mines and Technology. The view spans from east-northeast at left to southeast at right. Color in the scene comes from component images taken through three of the Pancam's color filters, centered on wavelengths of 753 nanometers (near-infrared), 535 nanometers (green) and 432 nanometers (violet). http://photojournal.jpl.nasa.gov/catalog/PIA20850
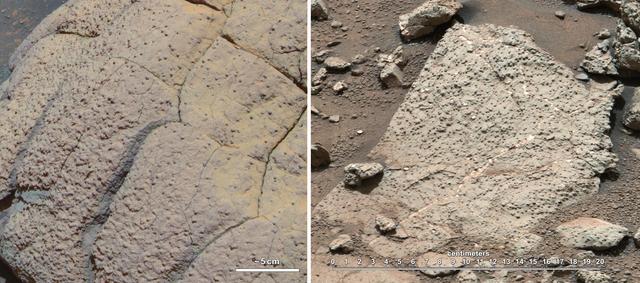
This set of images compares rocks seen by NASA Opportunity rover and Curiosity rover at two different parts of Mars.

This image shows a small part of Meridiani Planum, the site of the Opportunity Rover
NASA rover Opportunity used its navigation camera to take the images combined into this full 360-degree view of the rover surroundings after a drive on the 2,220th Martian day, or sol, of Opportunity mission on Mars April 22, 2010.
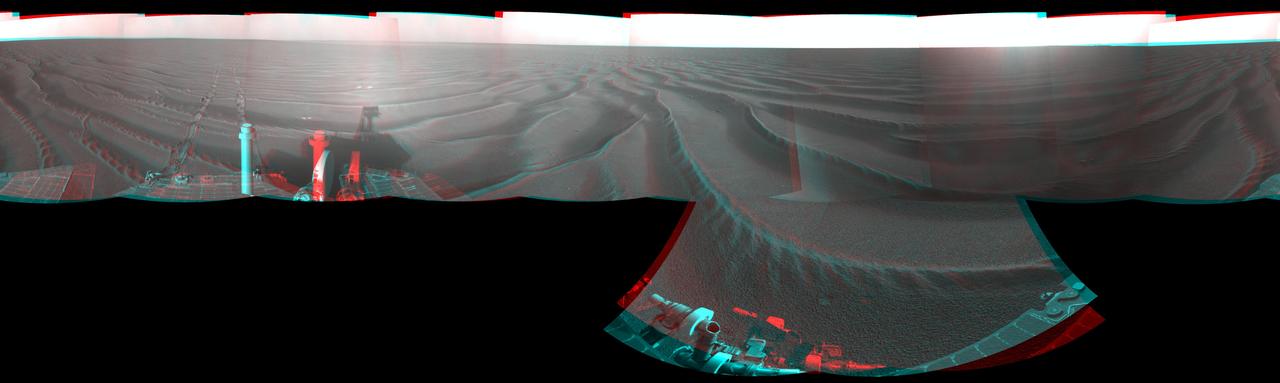
This 360-degree stereo anaglyph of the terrain surrounding NASA Mars Exploration Rover Opportunity was taken on the rover 171st sol on Mars. Opportunity had driven 11 meters 36 feet into Endurance Crater. 3D glasses are necessary.
NASA Mars Exploration Rover Opportunity combined images into this stereo, 360-degree view of the rover surroundings on Oct. 22, 2008. Opportunity position was about 300 meters southwest of Victoria. 3D glasses are necessary to view this image.
The flat-topped rock, informally named Tisdale 2, just below the center of this raw image from the rover Opportunity panoramic camera was chosen by the rover team in August 2011 as a stop for inspecting with tools on Opportunity robotic arm.
A portion of the west rim of Endeavour crater sweeps southward in this color view from NASA Mars Exploration Rover Opportunity. The rover first destination on the rim, called Spirit Point in tribute to Opportunity now-inactive twin, Spirit.

Full-scale models of three generations of NASA Mars rovers show the increase in size from the Sojourner rover of the Mars Pathfinder project, to the twin Mars Exploration Rovers Spirit and Opportunity, to the Mars Science Laboratory rover.

Full-scale models of three generations of NASA Mars rovers show the increase in size from the Sojourner rover of the Mars Pathfinder project, to the twin Mars Exploration Rovers Spirit and Opportunity, to the Mars Science Laboratory rover.

This panorama taken by NASA Mars Exploration Rover Opportunity includes an outcrop informally called Cambridge Bay. Opportunity examined this outcrop in August 2010.

NASA Mars Exploration Rover Opportunity observed this outcrop on the Murray Ridge portion of the rim of Endeavour Crater as the rover approached the 10th anniversary of its landing on Mars.
This image from the panoramic camera Pancam on NASA Mars Exploration Rover Opportunity shows a pale rock called Esperence, which was inspected by the rover in May 2013.
NASA Mars Exploration Rover Opportunity used its navigation camera to take the images combined into this 360-degree view of the rover surroundings.
This 3-D view from the navigation camera on NASA Mars Exploration Rover Opportunity shows a vista across Endeavour Crater, with the rover own shadow in the foreground.

NASA Mars Exploration Rover Opportunity recorded this view of the summit of Cape Tribulation, on the western rim of Endeavour Crater on the day before the rover drove to the top.

NASA Mars Exploration Rover Opportunity used its navigation camera to record this vista looking eastward across Endeavour Crater, with the rover own shadow in the foreground.
NASA Mars Exploration Rover Opportunity recorded this view of the summit of Cape Tribulation, on the western rim of Endeavour Crater on the day before the rover drove to the top.
This image taken from orbit shows the path driven by NASA Mars Exploration Rover Opportunity in the weeks around the rover arrival at the rim of Endeavour crater.
NASA Mars Exploration Rover Opportunity captured this image as the rover ascended Murray Ridge above Solander Point on the western rim of Endeavour Crater.
NASA Mars Exploration Rover Opportunity used its navigation camera during the rover 1,278th Martian day, or sol, Aug. 28, 2007 to take the images combined into this view. The rover was perched at the lip of Victoria Crater.

This mosaic of images was taken by NASA Mars Exploration Rover Opportunity during December of 2011. The accumulation of dust reduces the rover power supply, and the rover mobility is limited until the winter is over or wind cleans the panels.
NASA Mars Exploration Rover Opportunity captured this low-light raw image during the late afternoon of the rover 2,847th Martian sol Jan. 27, 2012. The rover is positioned for the Mars winter at Greeley Haven.
This image from the navigation camera on NASA Mars Exploration Rover Opportunity shows the view ahead on the day before the rover reached the rim of Endeavour crater. It was taken during the 2,680th Martian day, or sol, of the rover work on Mars.
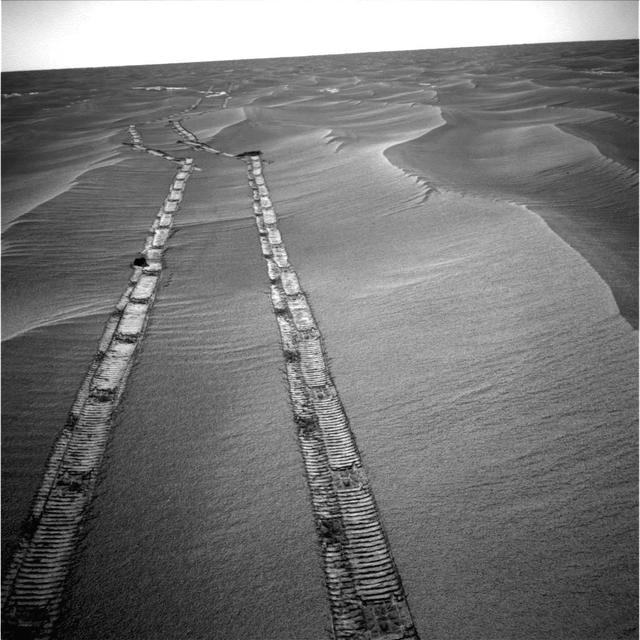
NASA rover Opportunity captured this image of the tracks the rover left on a drive from one energy-favorable position on the northern end of a sand ripple to another. The rover team calls this hopping from lily pad to lily pad.

KENNEDY SPACE CENTER, FLA. - On Launch Complex 17-B, Cape Canaveral Air Force Station, the Delta II Heavy launch vehicle carrying the rover "Opportunity" for the second Mars Exploration Rover mission launches at 11:18:15 p.m. EDT. Opportunity will reach Mars on Jan. 25, 2004. Together the two MER rovers, Spirit (launched June 10) and Opportunity, seek to determine the history of climate and water at two sites on Mars where conditions may once have been favorable to life. The rovers are identical. They will navigate themselves around obstacles as they drive across the Martian surface, traveling up to about 130 feet each Martian day. Each rover carries five scientific instruments including a panoramic camera and microscope, plus a rock abrasion tool that will grind away the outer surfaces of rocks to expose their interiors for examination. Each rover’s prime mission is planned to last three months on Mars.

KENNEDY SPACE CENTER, FLA. - On Launch Complex 17-B, Cape Canaveral Air Force Station, the Delta II Heavy launch vehicle carrying the rover "Opportunity" for the second Mars Exploration Rover mission launches at 11:18:15 p.m. EDT. Opportunity will reach Mars on Jan. 25, 2004. Together the two MER rovers, Spirit (launched June 10) and Opportunity, seek to determine the history of climate and water at two sites on Mars where conditions may once have been favorable to life. The rovers are identical. They will navigate themselves around obstacles as they drive across the Martian surface, traveling up to about 130 feet each Martian day. Each rover carries five scientific instruments including a panoramic camera and microscope, plus a rock abrasion tool that will grind away the outer surfaces of rocks to expose their interiors for examination. Each rover’s prime mission is planned to last three months on Mars.
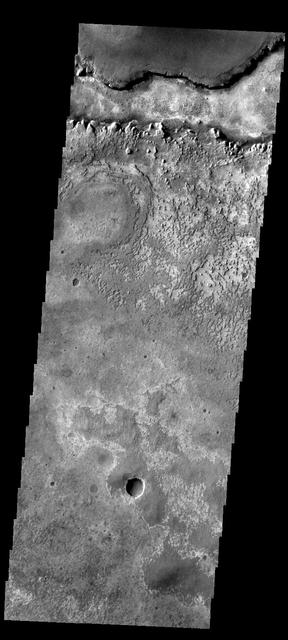
This image shows part of the Meridiani region of Mars, home of the Opportunity Rover. Image information: VIS instrument. Latitude 1.9N, Longitude 358.4E. 36 meter/pixel resolution. http://photojournal.jpl.nasa.gov/catalog/PIA01790

KENNEDY SPACE CENTER, FLA. - On Launch Complex 17-B, Cape Canaveral Air Force Station, the Delta II Heavy launch vehicle carrying the second Mars Exploration Rover, Opportunity, is poised for launch after rollback of the Mobile Service Tower. Opportunity will reach Mars on Jan. 25, 2004. Together the two MER rovers, Spirit (launched June 10) and Opportunity, seek to determine the history of climate and water at two sites on Mars where conditions may once have been favorable to life. The rovers are identical. They will navigate themselves around obstacles as they drive across the Martian surface, traveling up to about 130 feet each Martian day. Each rover carries five scientific instruments including a panoramic camera and microscope, plus a rock abrasion tool that will grind away the outer surfaces of rocks to expose their interiors for examination. Each rover’s prime mission is planned to last three months on Mars.

The gold line on this image shows NASA Mars Exploration Rover Opportunity route as it investigating on the western rim of Endeavour Crater.
This image taken by the NASA Mars rover Opportunity shows locations of the microscopic imager observations on a rock informally named Tisdale 2.

This anaglyph from NASA Mars Exploration Rover Opportunity at the rim of Victoria Crater. 3D glasses are necessary to view this image.
On September 28, 2008, NASA Mars rover Opportunity reached this location on the west side of Victoria Crater. 3D glasses are necessary.

This sweeping look at the unusual rock outcropping near NASA Mars Exploration Rover Opportunity. 3D glasses are necessary to view this image.
Synthetic image of the Opportunity Mars Exploration Rover inside on Burns Cliff produced using Virtual Presence in Space technology.
This image of Block Island was taken on July 28, 2009, with the front hazard-identification camera on NASA’s Mars Exploration Rover Opportunity.
This panorama is the view NASA Mars Exploration Rover Opportunity gained from the top of the Cape Tribulation segment of the rim of Endeavour Crater.

Synthetic image of the Opportunity Mars Exploration Rover inside Endurance Crater produced using Virtual Presence in Space technology.
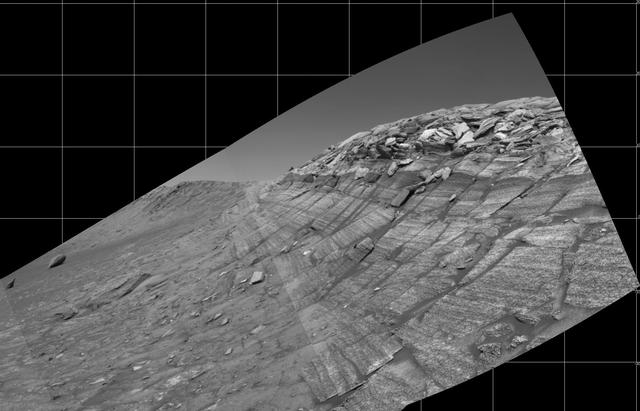
This view of rock layers exposed in the upper portion of the inner slope of "Endurance Crater" was captured by the navigation camera on NASA's Mars Exploration Rover Opportunity from the rover's position inside the crater during Opportunity's 134th sol on June 9, 2004. Scientists and engineers are assessing possible targets and routes among these rocks. The view is looking down into the crater, so the layers at the top of the image lie lower in the crater than the rocks in the foreground. http://photojournal.jpl.nasa.gov/catalog/PIA06263
NASA's Mars Exploration Rover Opportunity captured this view from the base of "Burns Cliff" during the rover's 280th martian day (Nov. 6, 2004). This cliff in the inner wall of "Endurance Crater" displays multiple layers of bedrock for the rover to examine with its panoramic camera and miniature thermal emission spectrometer. The rover team has decided that the farthest Opportunity can safely advance along the base of the cliff is close to the squarish white rock near the center of this image. After examining the site for a few days from that position, the the rover will turn around and head out of the crater. The view is a mosaic of frames taken by Opportunity's navigation camera. The rover was on ground with a slope of about 30 degrees when the pictures were taken, and the view is presented here in a way that corrects for that tilt of the camera. http://photojournal.jpl.nasa.gov/catalog/PIA07039

NASA Mars Exploration Rover Opportunity captured this view of its afternoon shadow stretching into Endeavour Crater during the 3,051st Martian day, or sol, of Opportunity work on Mars Aug. 23, 2012.
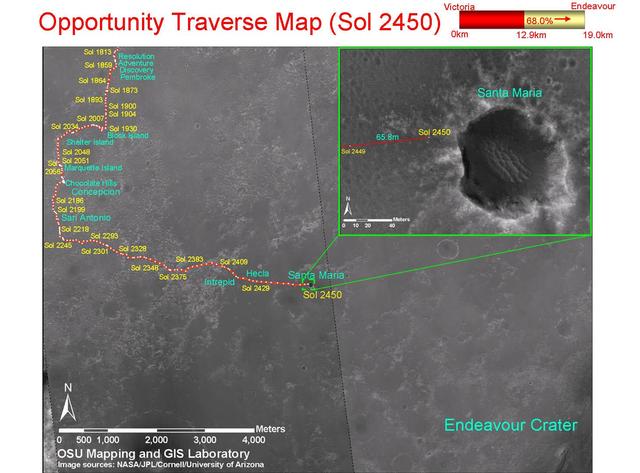
This map shows the path that NASA Mars Exploration Rover Opportunity followed from the 1,813th Martian day, or sol, to Sol 2450 Dec. 15, 2010 when Opportunity approached a crater informally named Santa Maria.