
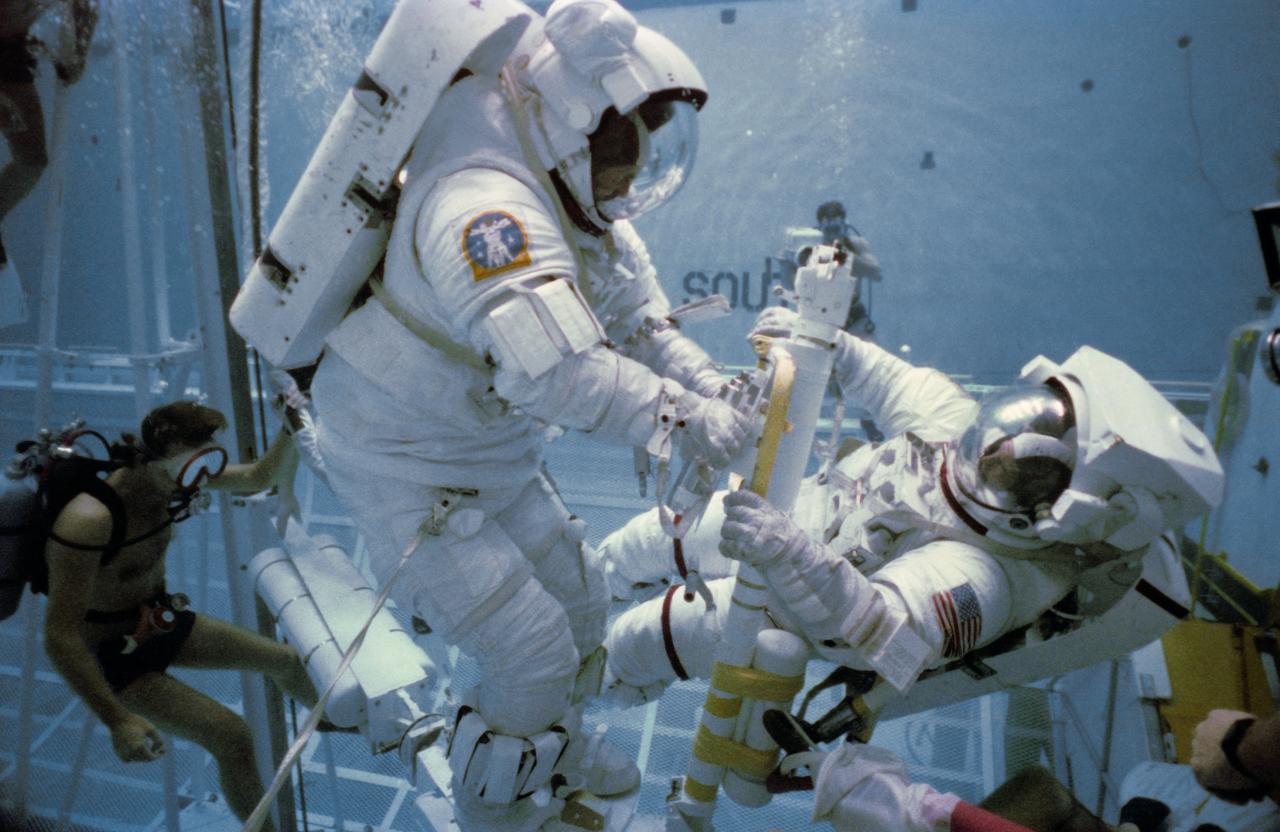
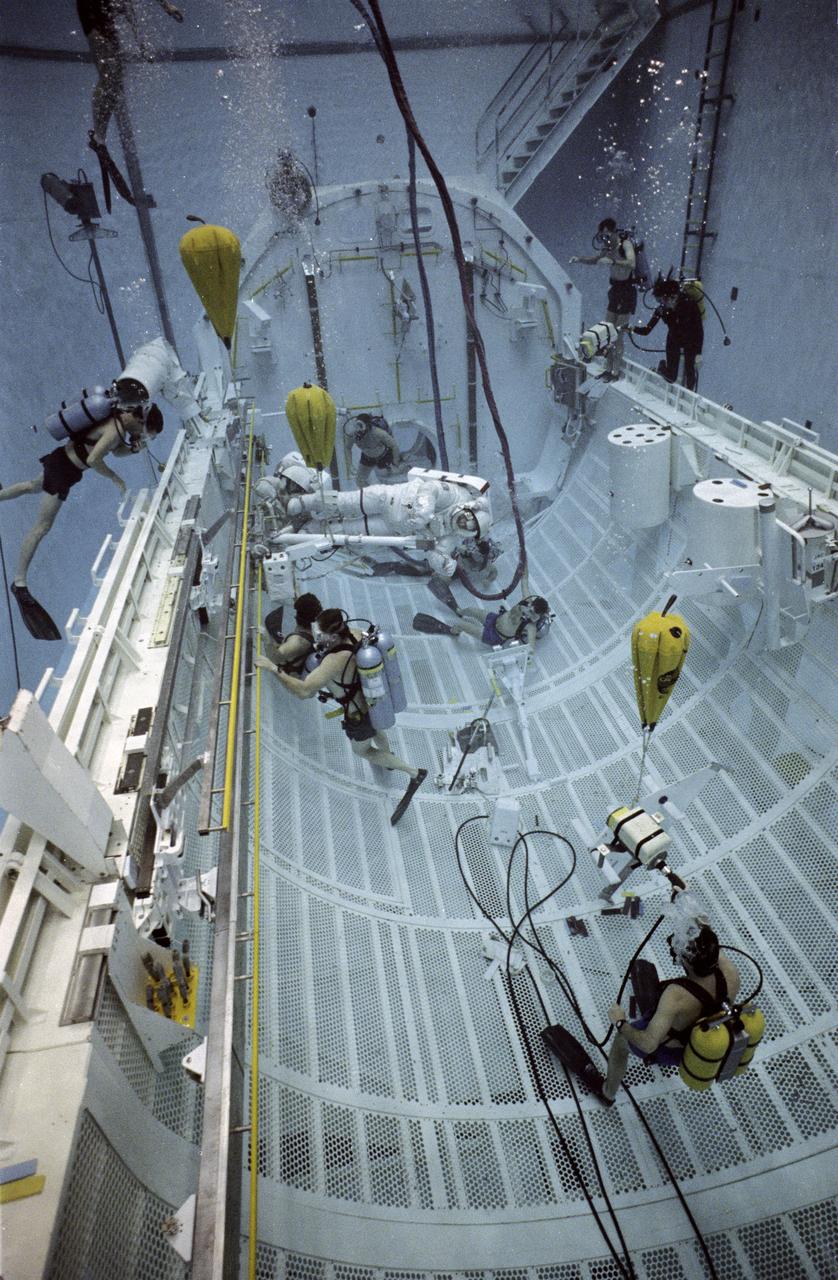
STS-31 Mission Specialist (MS) Bruce McCandless II (left), wearing an extravehicular mobility unit (EMU), maneuvers his way around a mockup of the remote manipulator system (RMS) end effector during an underwater simulation in JSC's Weightless Environment Training Facility (WETF) Bldg 29 pool. The end effector is attached to a grapple fixture on the Hubble Space Telescope (HST) mockup. As McCandless performs contingency extravehicular activity (EVA) procedures, fellow crewmember MS Kathryn D. Sullivan, in EMU, works on the opposite side of the HST mockup, and SCUBA-equipped divers monitor the activity. Though no EVA is planned for STS-31, the two crewmembers train for contingencies that would necessitate leaving the shirt sleeve environment of Discovery's, Orbiter Vehicle (OV) 103's, crew cabin and performing chores with the HST payload or related hardware in the payload bay (PLB).
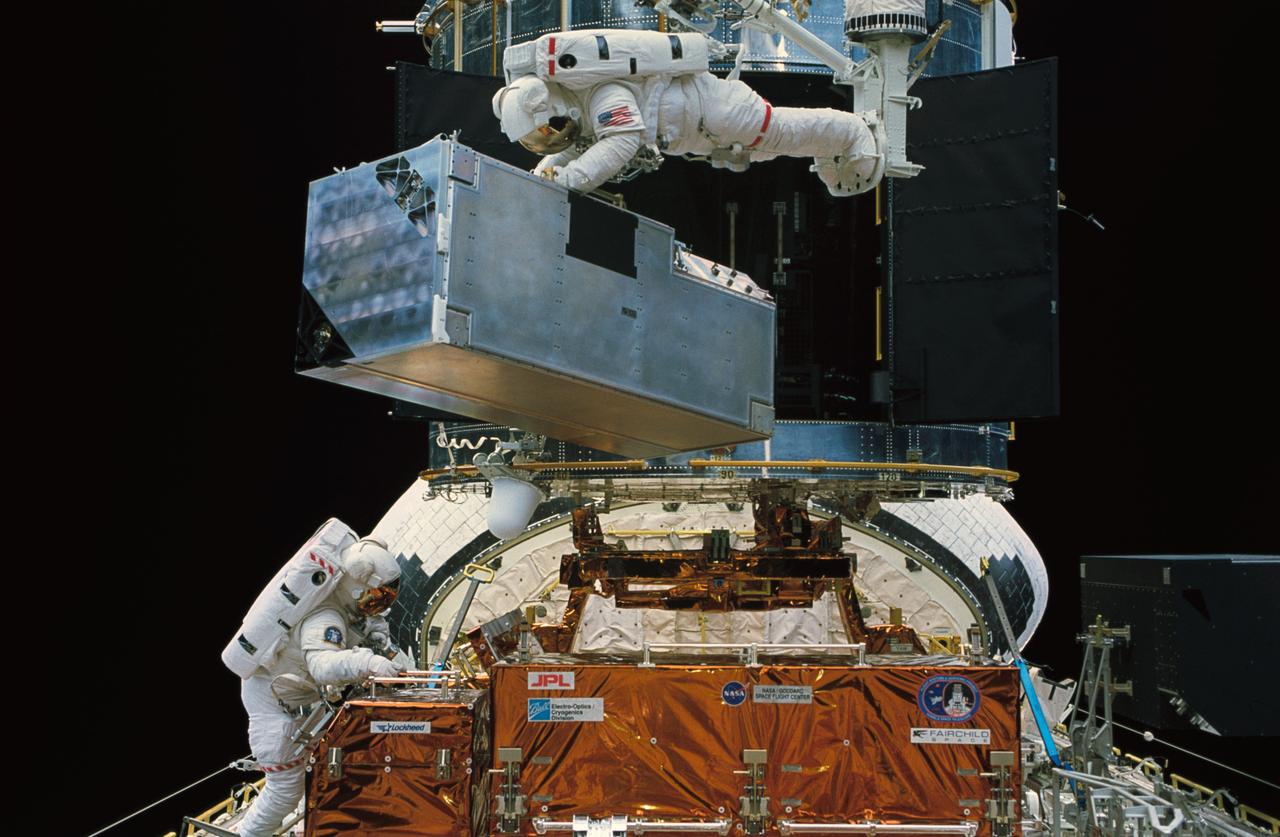
STS061-47-014 (8 Dec 1993) --- Astronaut Kathryn C. Thornton lifts the Corrective Optics Space Telescope Axial Replacement (COSTAR) prior to its installation on the Hubble Space Telescope (HST). Thornton is anchored to a foot restraint on the end of the Remote Manipulator System (RMS) arm. Astronaut Thomas D. Akers, who assisted in the COSTAR installation, is at lower left.

STS054-05-008 (17 Jan 1993) --- Astronaut Gregory J. Harbaugh translates along the starboard longeron of Endeavour's cargo bay. Astronauts Harbaugh and Mario Runco Jr., mission specialists, spent four-plus hours on the extravehicular activity (EVA) on January 17, 1993. Also onboard NASA's newest Shuttle for the six-day mission were astronauts John H. Casper, mission commander; and Donald R. McMonagle, pilot; and Susan J. Helms, mission specialist. The photograph was taken with a 35mm camera.
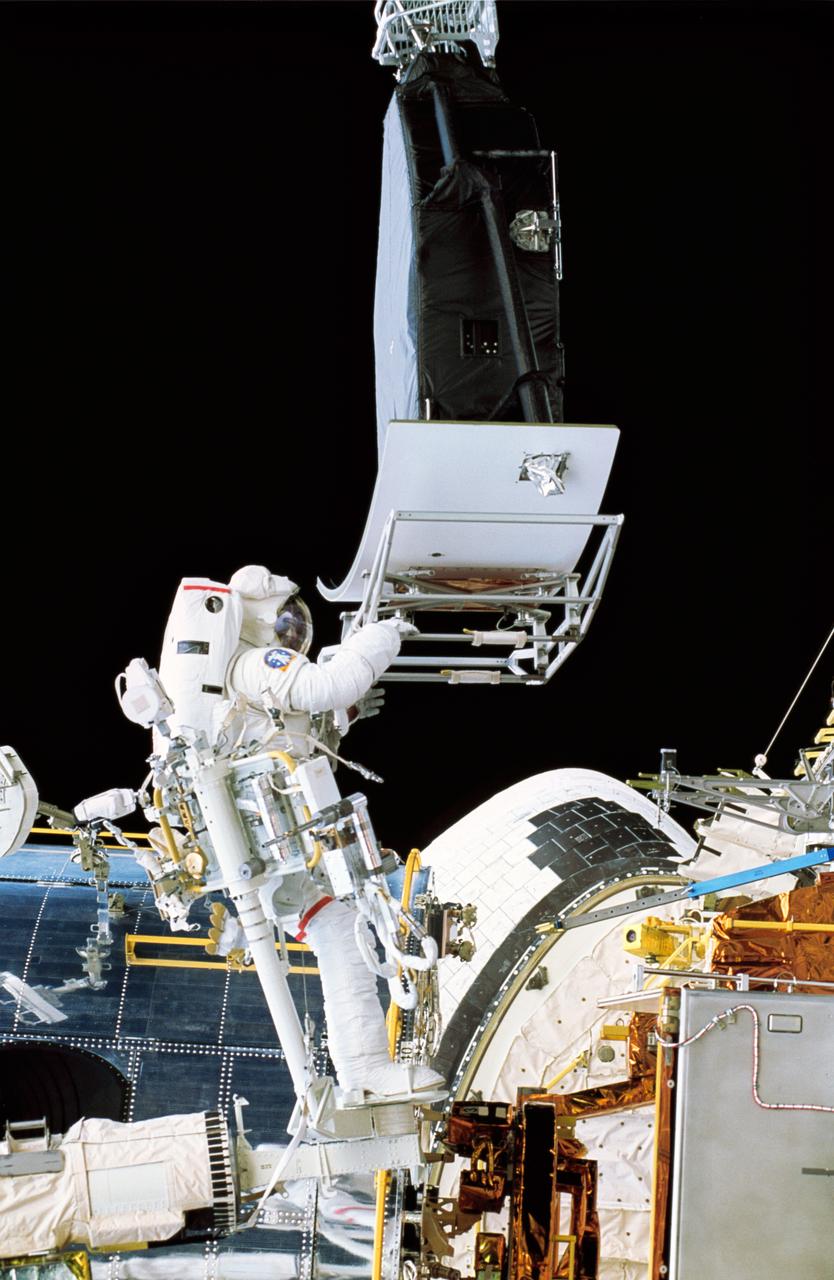
STS061-37-011 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman with Wide Field/Planetary Camera (WF/PC 1) during changeout operations. WF/PC-2 has already been installed in cavity (out of frame). Astronauts Hoffman and Story Musgrave are performing Extravehicular Activities (EVA) to repair the Hubble Space Telescope (HST).

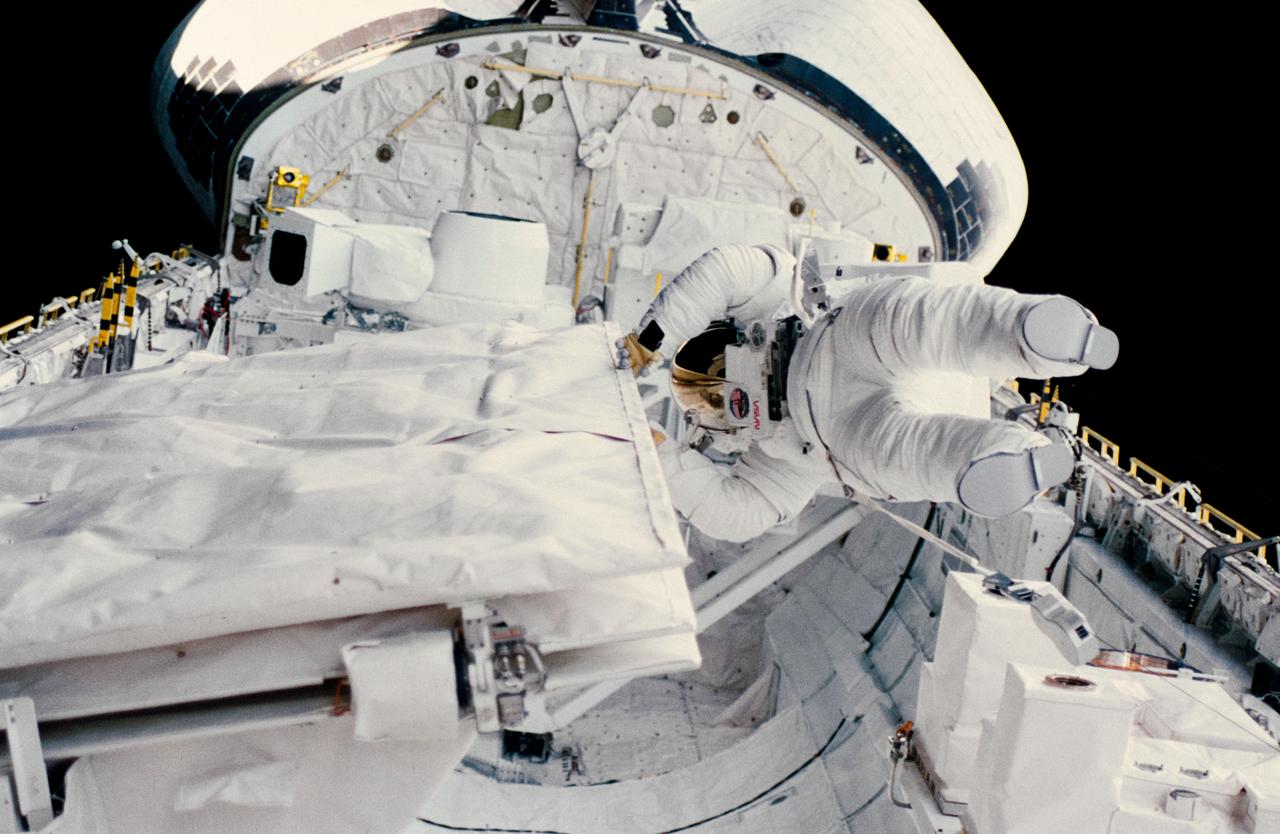
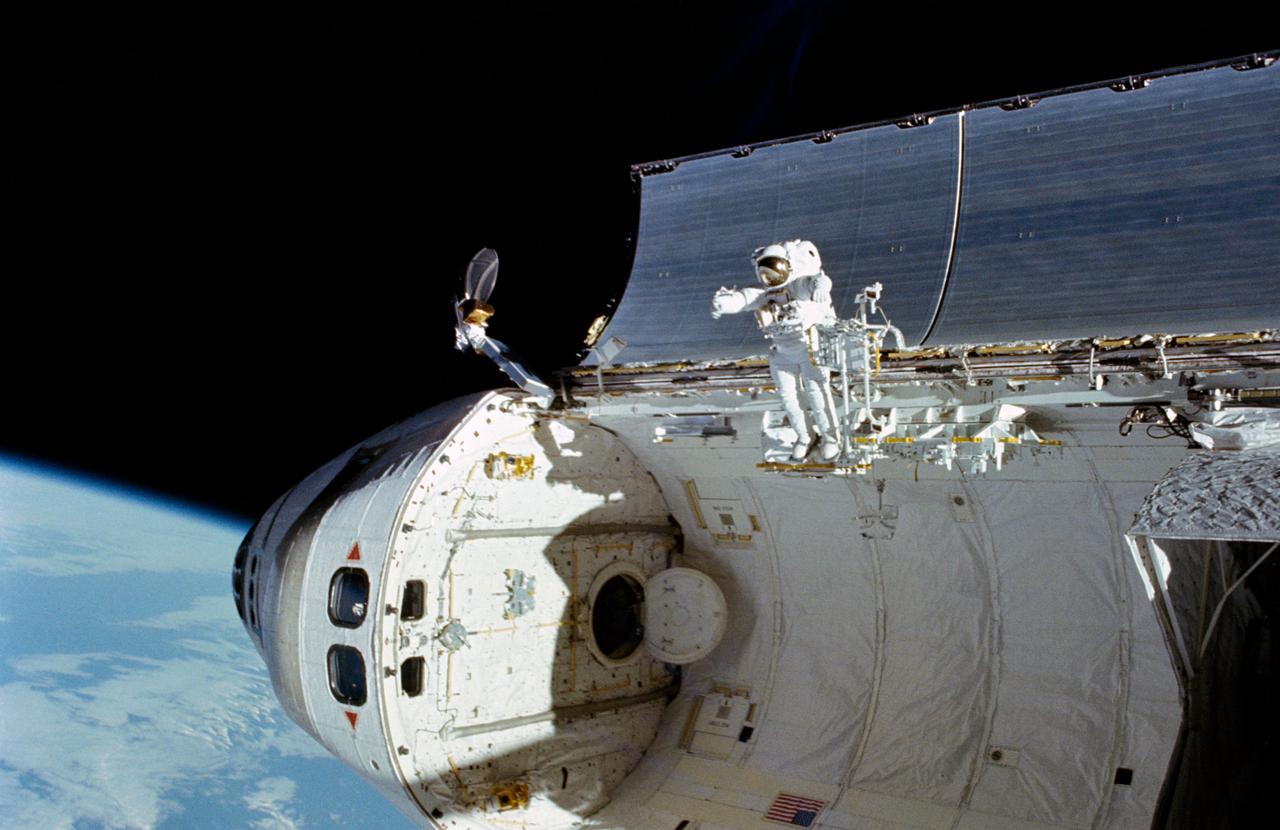
STS037-18-032 (7 April 1991) --- Astronaut Jerry L. Ross, mission specialist, peers into Space Shuttle Atlantis' cabin and is photographed by a fellow crew member using a 35mm camera. Ross was in the space shuttle's cargo bay to join astronaut Jerome (Jay) Apt in accomplishing a repair task on the Gamma Ray Observatory (GRO), seen in left frame. The two had been called upon to manually extend the high-gain antenna on GRO.
41G-13-032 (11 Oct. 1984) --- Astronaut Kathryn D. Sullivan checks the latch of the SIR-B antenna in the space shuttle Challenger's open cargo bay during her historic extravehicular activity (EVA) on Oct. 11, 1984. Earlier, America's first woman to perform an EVA and astronaut David C. Leestma, participated in an in-space simulation of refueling a spacecraft in orbit. The Orbital Refueling System (ORS) is just beyond the astronaut mission specialist's helmet. To the left is the Large Format Camera (LFC). The LFC and ORS are stationed on a device called the Mission Peculiar Support Structure (MPESS). Crew members consisted of astronauts Robert L. Crippen, commander; Jon A. McBride, pilot; along with Kathryn D. Sullivan, Sally K. Ride, and David D. Leestma, all mission specialists; and Canadian astronaut Marc Garneau and Paul D. Scully-Power, both payload specialist. EDITOR'S NOTE: The STS-41G mission had the first American female EVA (Sullivan); first seven-person crew; first orbital fuel transfer; and the first Canadian (Garneau).
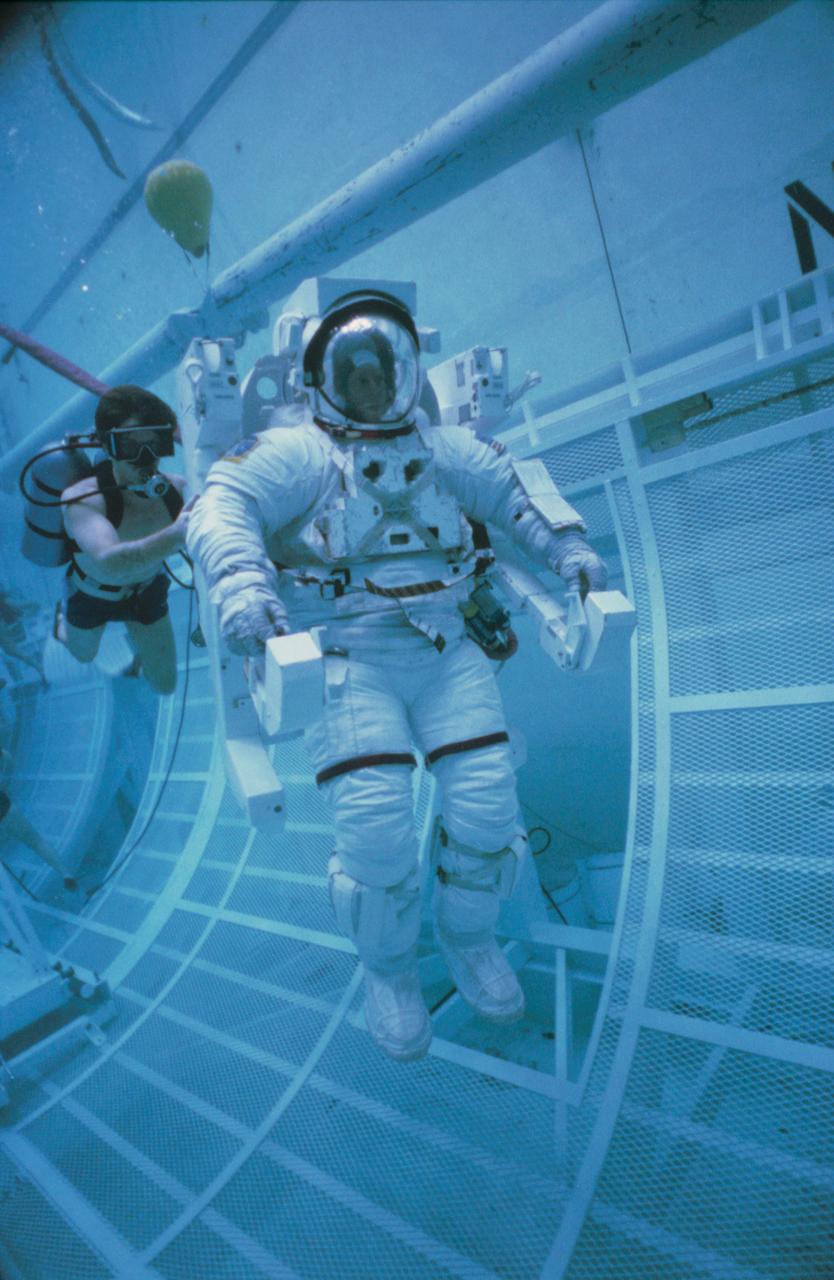
S83-42895 (19 Oct 1983) --- Astronauts George D. Nelson and James D. van Hoften, NASA Flight STS-41C mission specialists, offer an underwater version of a preview of their mission's extravehicular activity (EVA). The April 1984 flight includes as one of its primary objectives a two-person EVA and a visit to the damaged Solar Maximum Satellite (SMS). Van Hoften, left, and Nelson work here with the mobile foot restraint (MFR), which attaches to the remote manipulator system (RMS) arm to form a "cherry-picker" device. Van Hoften is standing on the MFR. The two are making use of the Johnson Space Center's (JSC) weightless environment training facility (WET-F). This photograph was taken by Otis Imboden.

Astronaut James H. Newman, mission specialist, uses a 35mm camera to take a picture of fellow astronaut Carl E. Walz (out of frame) in Discovery's cargo bay. The two were engaged in an extravehicular activity (EVA) to test equipment to be used on future EVA's. Newman is tethered to the starboard side, with the orbital maneuvering system (OMS) pod just behind him.

51D-04-025 (16 April 1985) --- Bearing a maze of interesting reflections, this aquarium-like scene came during one of the lighter moments of emergency extravehicular activity (EVA) aboard the Earth-orbiting Space Shuttle Discovery. Astronaut S. David Griggs, waving from the cargo bay into the flight deck, earlier participated with astronaut Jeffrey A. Hoffman in the successful attachment of two special tools to the end of the Canadian-built Remote Manipulator System (RMS) arm. The Earth's horizon appears both in the background of the scene and in the reflection in Griggs' helmet visor.
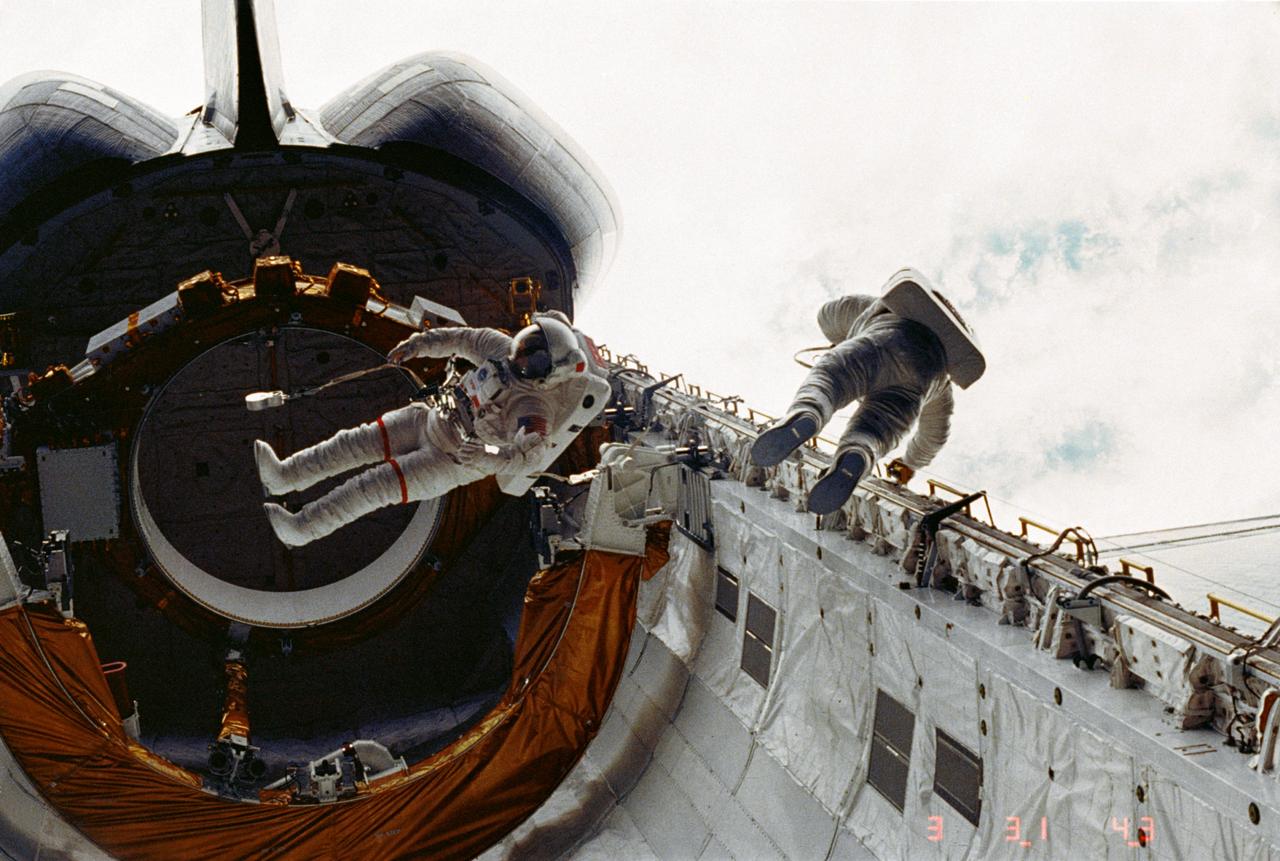
STS006-10-417 (7 April 1983) --- Astronauts F. Story Musgrave, left, and Donald H. Peterson float about in the cargo bay of the Earth-orbiting space shuttle Challenger during their April 7, 1983, extravehicular activity (EVA). Their "floating about" is restricted via tethers to safety slide wires. Thanks to the tether/slide wire combination, Peterson is able to translate along the port side hand rails. Musgrave is near the Airborne Support Equipment (ASE) for the now vacated Inertial Upper Stage (IUS). Clouds can be seen in the background. Photo credit: NASA

STS082-344-019 (11-21 Feb. 1997) --- Attired in the Extravehicular Mobility Unit (EMU) spacesuit, astronaut Mark C. Lee, payload commander, is in the airlock Discovery preparing for one of five STS-82 space walks. The sessions of extravehicular activity (EVA), of which Lee eventually participated in three, were conducted in order to service the Hubble Space Telescope (HST), temporarily latched in Discovery's payload bay.

STS082-344-018 (11-21 Feb. 1997) --- Attired in the Extravehicular Mobility Unit (EMU) space suit, astronaut Steven L. Smith, mission specialist, is in the airlock of Discovery preparing for one of five STS-82 spacewalks. The sessions of extravehicular activity (EVA), of which Smith eventually participated in three, were conducted in order to service the Hubble Space Telescope (HST), temporarily latched in Discovery's payload bay.
Underwater extravehicular activity (EVA) training in the weightless environment training facility (WETF) with astronauts George Nelson and James van Hoften. They are using tools to assemble material in the facility while surrounded by divers (428895); View of George Nelson in full extravehicular mobility unit (EMU) floating inside the space shuttle payload bay mockup with a diver behind him (42896).
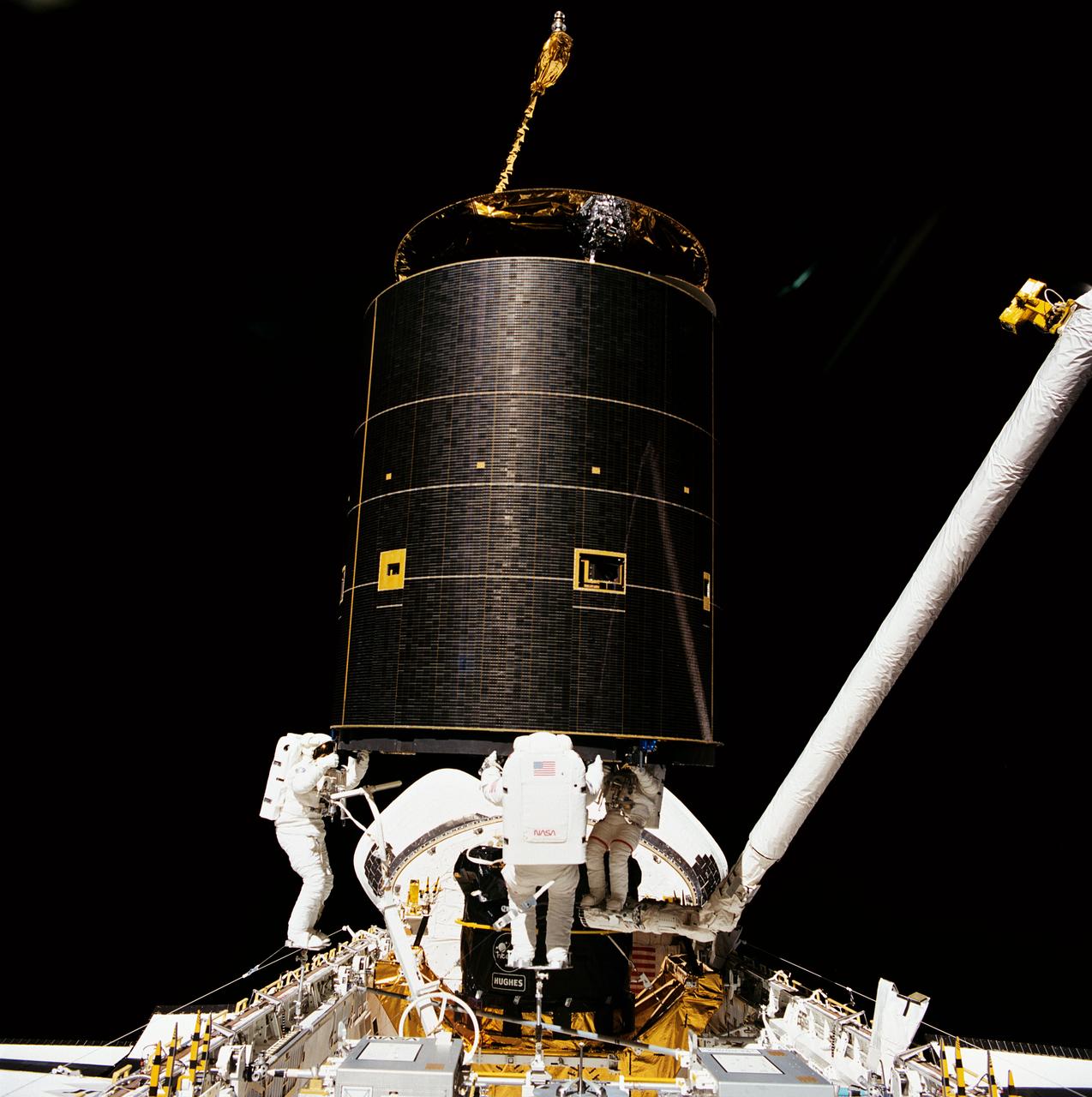
STS049-91-026 (13 May 1992) --- Three astronauts hold onto the 4.5-ton Intelsat VI satellite after a six-handed "capture" was made minutes earlier. Left to right are astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot. Thuot stands on the end of the remote manipulator system arm, from which he had made two earlier unsuccessful grapple attempts on two-person extravehicular activity sessions. Ground controllers and crew members agreed that a third attempt, using three mission specialists in the cargo bay of the space shuttle Endeavour, was the effort needed to accomplish the capture feat.

STS049-91-029 (13 May 1992) --- Following the successful capture of Intelsat VI satellite, three astronauts continue their chores toward moving the 4.5 ton communications satellite into the space shuttle Endeavour's cargo bay. A fellow crew member recorded this 70mm still frame from inside Endeavour's cabin. Left to right, astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot, cooperate on the effort to attach a specially designed grapple bar underneath the satellite. Thuot stands on the end of the Remote Manipulator System's (RMS) arm while Hieb and Akers are on Portable Foot Restraints (PFR) affixed to Endeavour's portside and the Multipurpose Support Structure (MPESS), respectively. The sections of Earth which form the backdrop for the scene are blanketed with thousands of square miles of clouds. Photo credit: NASA
S84-27023 (7 Feb 1984) --- This 70mm frame shows astronaut Bruce McCandless II moving in to conduct a test involving the Trunion Pin Attachment Device (TPAD) he carries and the Shuttle Pallet Satellite (SPAS-01A) partially visible at bottom of frame. SPAS was a stand-in for the damaged Solar Maximum Satellite (SMS) which will be visited for repairs by the STS-41C Shuttle crew in early spring. This particular Extravehicular Activity (EVA) session was a rehearsal for the SMS visit. The test and the actual visit to the SMS both involve the use of jet-powered, hand-controlled Manned Maneuvering Unit (MMU). The one McCandless uses is the second unit to be tested on this flight. Astronaut Robert L. Stewart got a chance to work with both MMU's on the two EVA's.

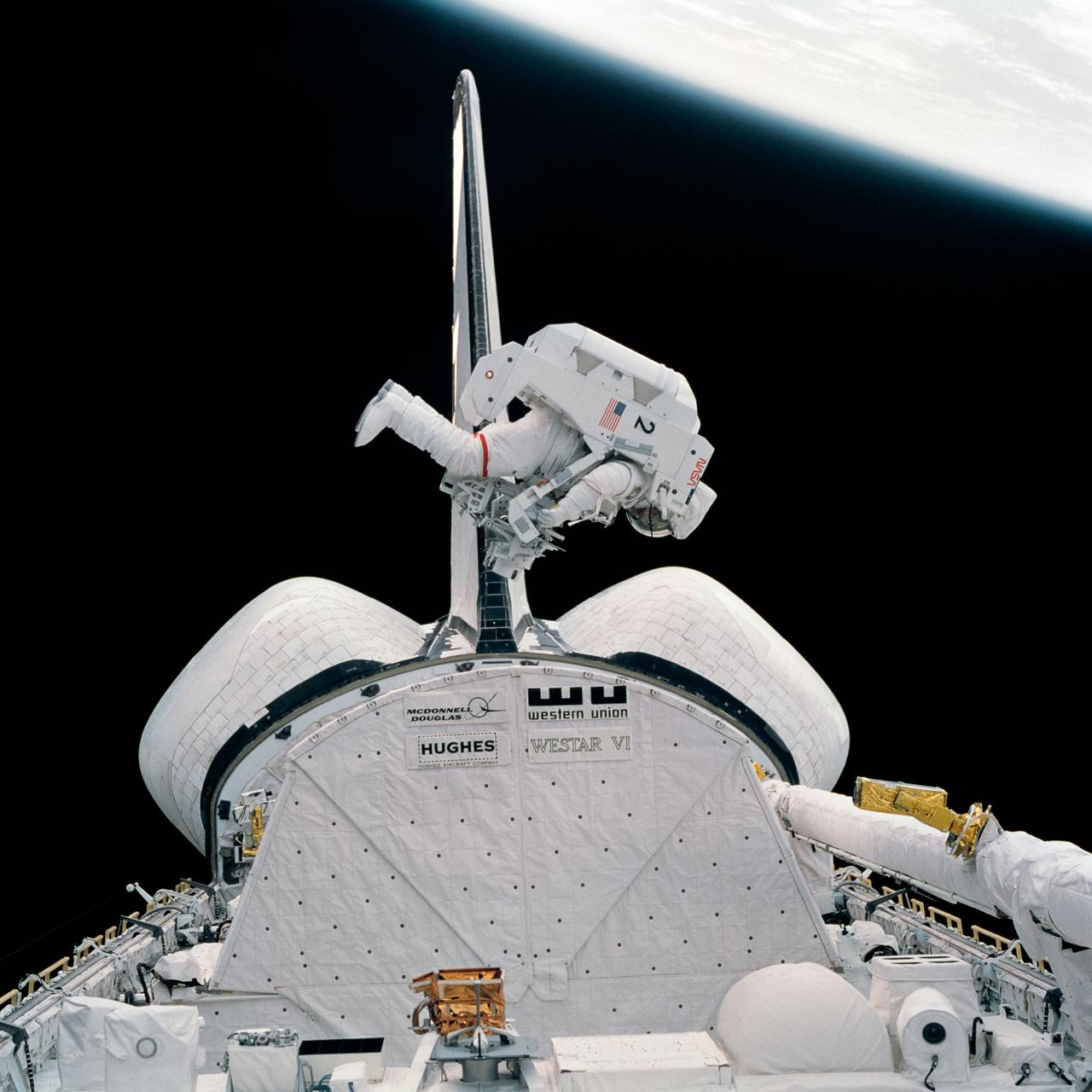
S84-27021 (7 Feb 1984) --- Astronaut Bruce McCandless II, 41B mission specialist tests a "cherry-picker" type device during February 7 historical Extravehicular Activity (EVA). The EVA, in which Astronauts McCandless and Robert L. Stewart, two of three STS-41B mission specialists, participated, marked two firsts--initial use of both the Mobile Foot Restraint (MFR) attached to the Remote Manipulator System (RMS) arm here, and the Manned Maneuvering Unit (MMU) backpack (not seen in this frame). The Challenger was flying with its aft end aimed toward the Earth. This photograph clearly shows where the MFR connects to the end effector of the Canadian-built RMS arm. The two spacewalkers were monitored and photographed by their fellow crewmembers, astronauts Vance D. Brand, commander; Robert L. Gibson, pilot; and Ronald E. McNair, mission specialist. The three remained in the cabin for another EVA session two days later. Photo Credit: NASA
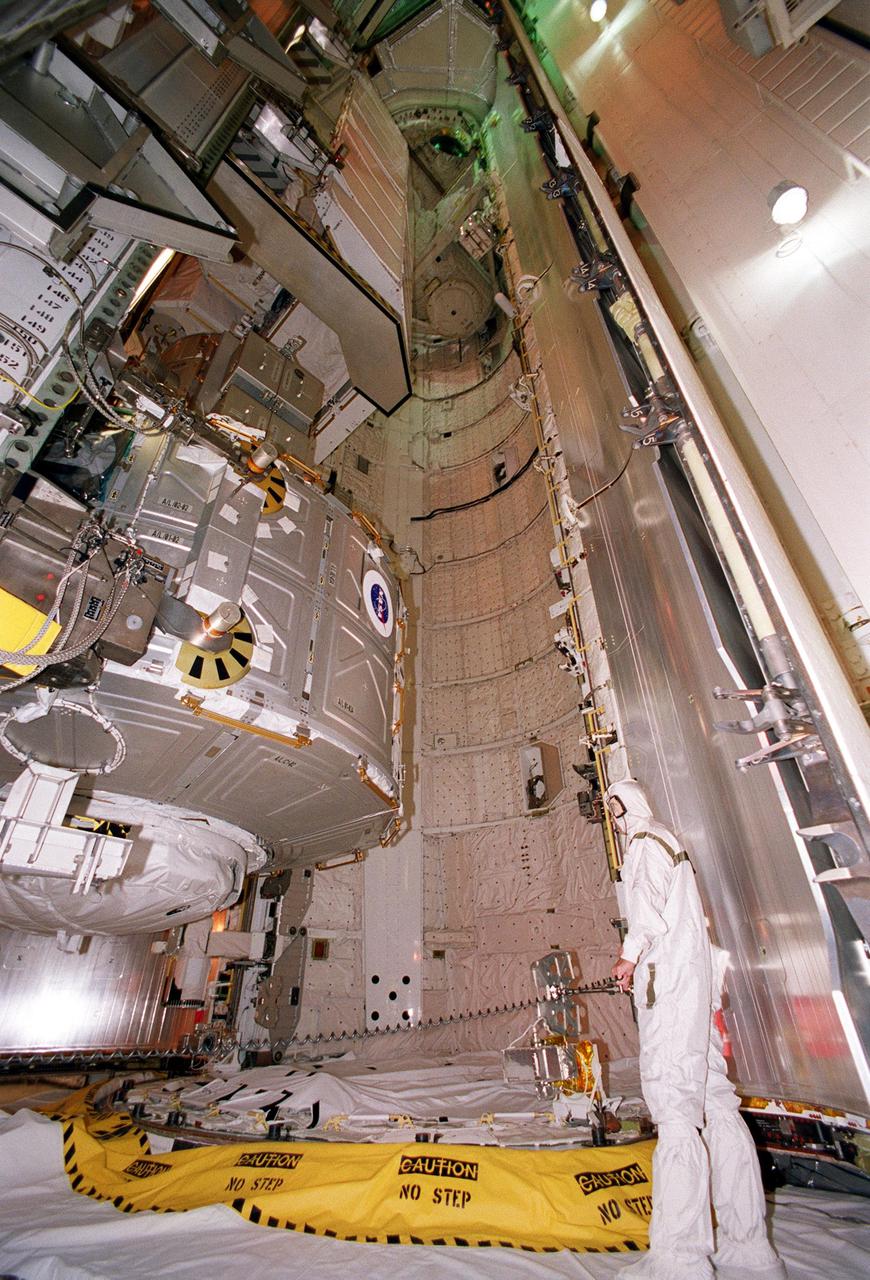
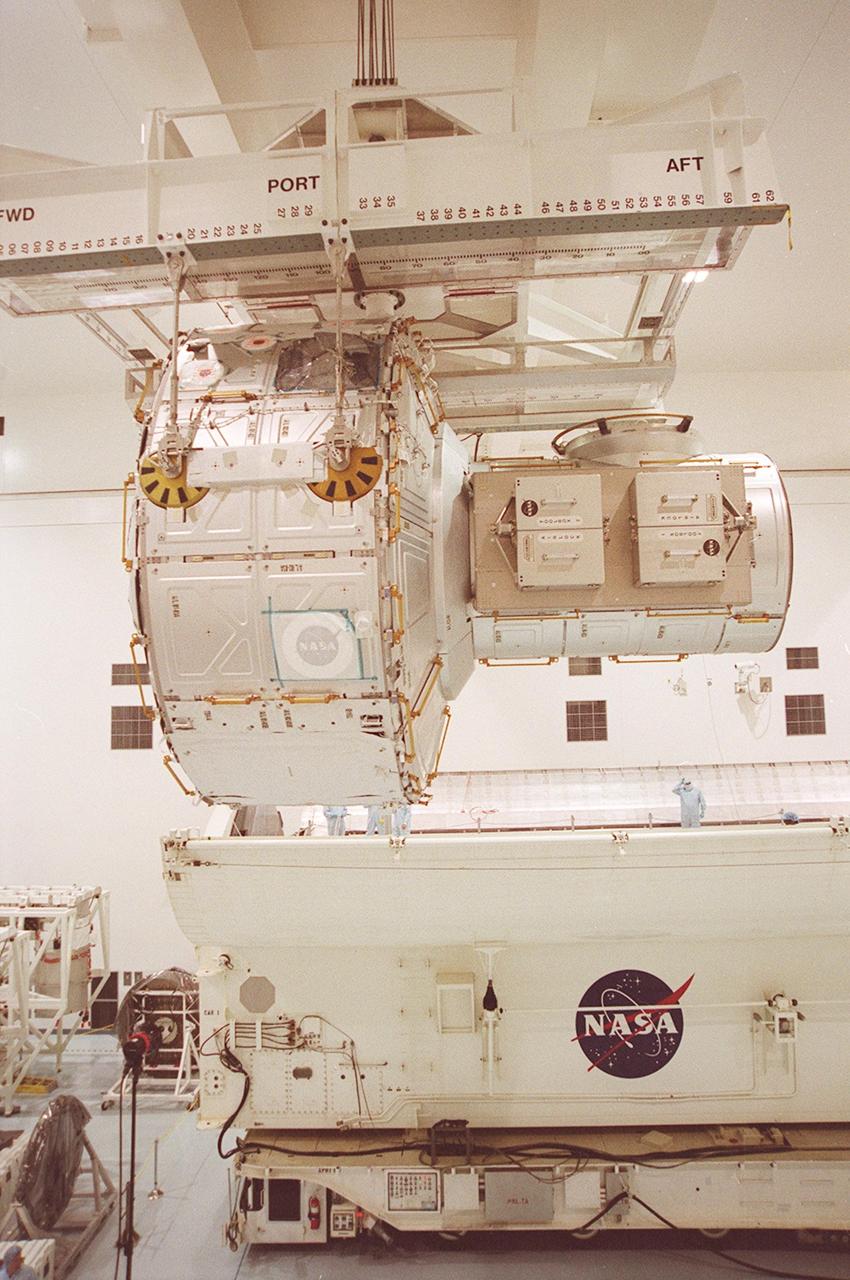
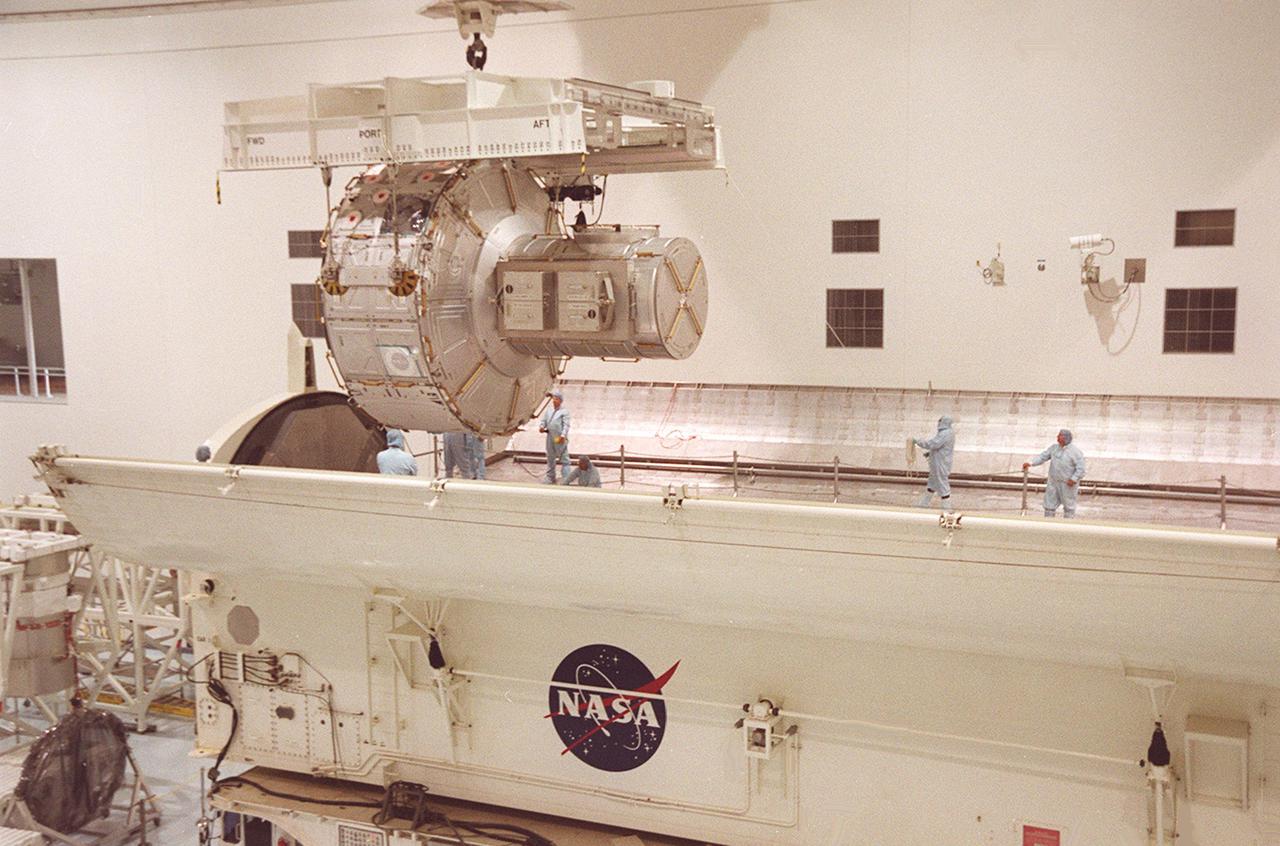
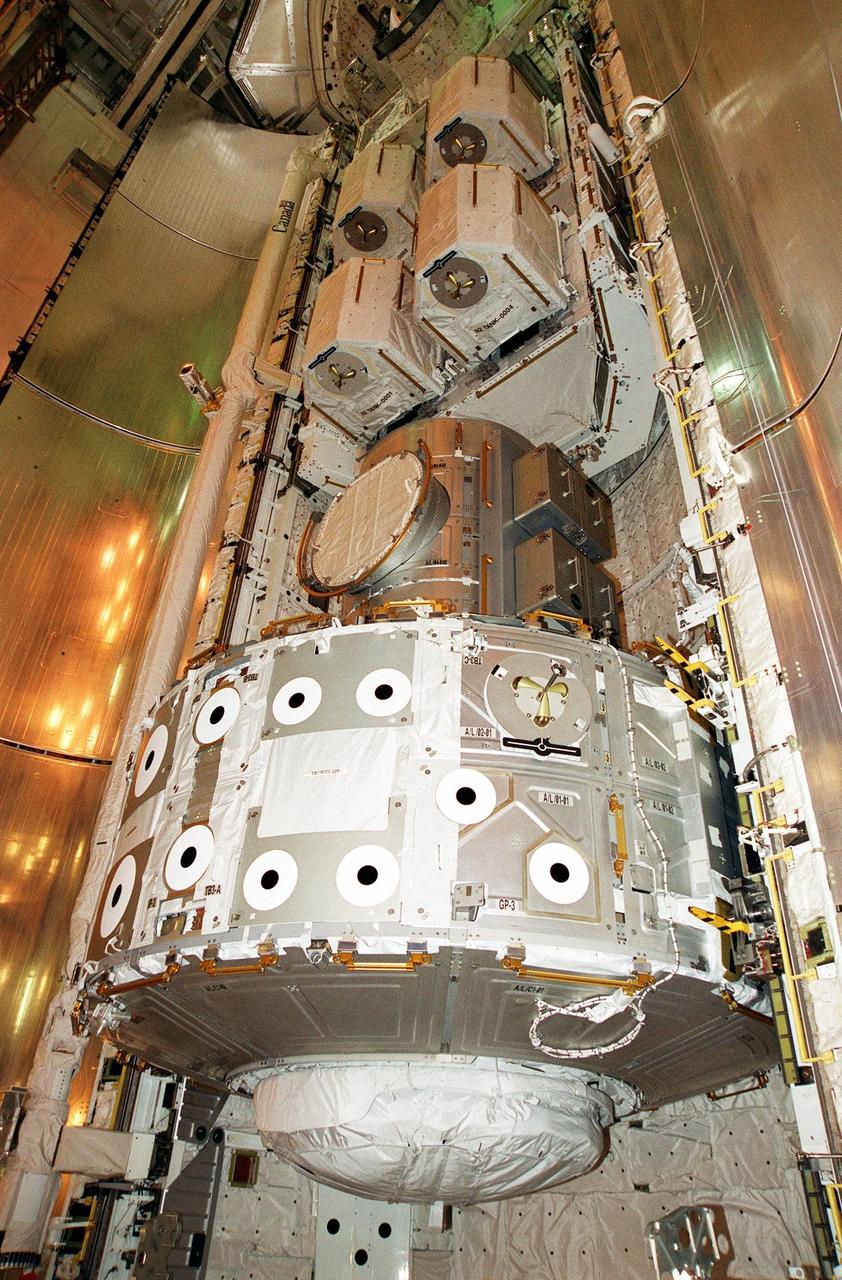
KENNEDY SPACE CENTER, Fla. -- The Joint Airlock Module, sporting a NASA logo, is moved toward the payload bay of Space Shuttle Atlantis for mission STS-104. Once installed and activated, the airlock becomes the primary path for International Space Station spacewalk entry and departure using U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. Launch of Atlantis is scheduled no earlier than July 12 at 5:04 a.m. EDT
KENNEDY SPACE CENTER, Fla. -- The Joint Airlock Module, sporting a NASA logo, is moved toward the payload bay of Space Shuttle Atlantis for mission STS-104. Once installed and activated, the airlock becomes the primary path for International Space Station spacewalk entry and departure using U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. Launch of Atlantis is scheduled no earlier than July 12 at 5:04 a.m. EDT
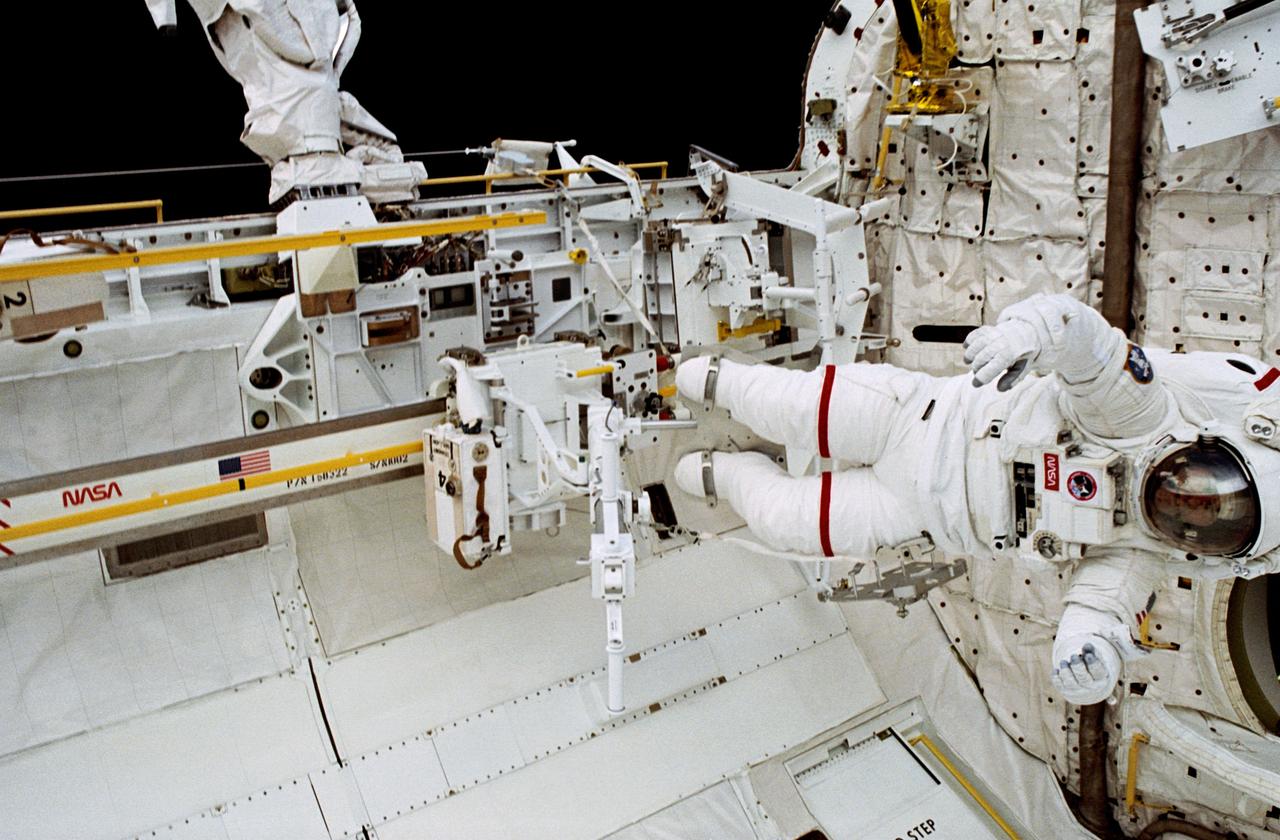
S37-52-008 (April 1999) --- STS-37 Mission Specialist Jerry L. Ross, attired in an extravehicular mobility unit (EMU) with red stripes, can be seen with the crew and equipment transport aid (CETA) just below the base of the remote manipulator system arm on the port side of the payload bay of the space shuttle Atlantis. Photo credit: NASA

STS057-32-008 (25 June 1993) --- Astronaut G. David Low (nearer camera), his feet anchored to Endeavour's Remote Manipulator System (RMS), lifts fellow astronaut Peter J. K. (Jeff) Wisoff during a special phase of the lengthy June 25, 1993, extravehicular activity (EVA). This phase of the EVA dealt with the simulation of handling large components in space. This particular task was rehearsed with eyes toward the servicing of the Hubble Space Telescope (HST) in the near future or the assembly and maintenance of the International Space Station later. The two mission specialists and four other NASA astronauts spent almost ten days aboard the Space Shuttle Endeavour in Earth-orbit supporting the SPACEHAB mission, retrieving the European Retrievable Carrier (EURECA) and conducting various experiments.

Astronauts Jerry L. Ross (left) and Sherwood C. (Woody) Spring are photographed as they assemble pieces of the Experimental Assembly of Structures in Extravehicular Activities (EASE) device in the open payload bay. The Canadian-built remote manipulator system (RMS) arm (partially obscured in the right portion of the frame) is in position to allow television cameras to record the activity.
51I-102-048 (4-5 Sept 1985) --- A 35mm frame showing astronaut William F. Fisher standing on the edge of Discovery's cargo bay (in foot restraint) during the second day of a two-day effort to capture, repair and re-release the Syncom IV-3 communications satellite. Astronaut James D. van Hoften, standing on the Discovery's RMS arm, exposed the frame.

STS057-89-042 (24 June 1993) --- Baja California forms the backdrop for this extravehicular activity (EVA) scene captured on 70mm film by one of the STS-57 crew members in the Space Shuttle Endeavour's crew cabin. Working near the recently "captured" European Retrievable Carrier (EURECA) at frame center are astronauts G. David Low (nearest camera) and Peter J. K. (Jeff) Wisoff. Low is attached to a mobile foot restraint to the end of the Canadian-built Remote Manipulator System (RMS) arm. The SPACEHAB module is seen in the foreground and EURECA is partially visible near Endeavour's aft firewall.

In Discovery's cargo bay, astronaut James H. Newman works with the power ratchet tool (PRT). Astronaut Carl E. Walz, who joined Newman for the lengthy period of extravehicular activity (EVA), is partially visible in the background. The two mission specialists devoted part of their EVA to evaluating tools and equipment expected to be used in the Hubble Space Telescope servicing. A desert area in Africa forms the backdrop for the 70mm scene.

With the Caribbean Sea and part of the Bahama Islands chain as a backdrop, two STS-51 crewmembers evaluate procedures and gear to be used on the upcoming Hubble Space Telescope (HST)-servicing mission. Sharing the lengthy extravehicular activity in and around Discovery's cargo bay were astronauts James H. Newman (left), and Carl E. Walz, mission specialists.

STS051-34-028 (16 Sept. 1993) --- This unusual scene of Extravehicular Activity (EVA) was captured on 35mm film by one of the supportive in-cabin crew members. Astronaut James H. Newman, working on the Space Shuttle Discovery's starboard side, is nearer the camera, with astronaut Carl E. Walz traversing near the aft firewall and the Airborne Support Equipment (ASE).

61B-41-047 (1 Dec 1985) --- Astronauts Jerry L. Ross (left) and Sherwood C. (Woody) Spring are photographed by Astronaut Bryan D. O'Connor as they continue to assemble more pieces of the EASE (Experimental Assembly of Structures in Extravehicular Activities) device during the week-long STS 61-B mission. This frame is one of a series covering the structure's build-up.

STS054-S-033 (17 Jan 1993) --- Runco works with a mobile foot restraint during extravehicular activity (EVA) in Endeavour's cargo bay. The scene was downlinked at 11:52:04:28 GMT, Jan. 17, 1993.

41C-37-1711 (11 April 1984) --- The two mission specialist-EVA participants of Flight 41-C share a repair task at the "captured" Solar Maximum Mission Satellite (SMMS) in the aft end of the Challenger's cargo bay. Astronauts George D. Nelson, right, and James D. van Hoften uses the mobile foot restraint and the Remote Manipulator System (RMS) as a "cherry picker" device for moving about. Later, the RMS lifted the SMMS into space once more.

STS049-77-028 (14 May 1992) --- Astronaut Thomas D. Akers, STS-49 mission specialist, grabs a strut device as fourth period of extravehicular activity (EVA) gets underway in the Space Shuttle Endeavour's cargo bay. Akers is positioned near the Multi-purpose Support Structure (MPESS). The purpose of the final EVA on this nine-day mission was the evaluation of Assembly of Station by EVA Methods (ASEM). The scene was recorded on 70mm film by a fellow crew member in the space shuttle's cabin. Astronaut Kathryn C. Thornton (out of frame) joined Akers on the 7 1/2 hour EVA.

STS054-80-0N (17 Jan 1993) --- Astronaut Gregory J. Harbaugh moves along the starboard side of Endeavour's cargo bay during the four-plus hour long extravehicular activity (EVA) on January 17, 1993. The photograph was taken with a 70mm camera from inside Endeavour's cabin by a fellow crewmember. Three astronauts remained inside to support the spacewalk by astronauts Harbaugh and Mario Runco Jr. (out of frame).
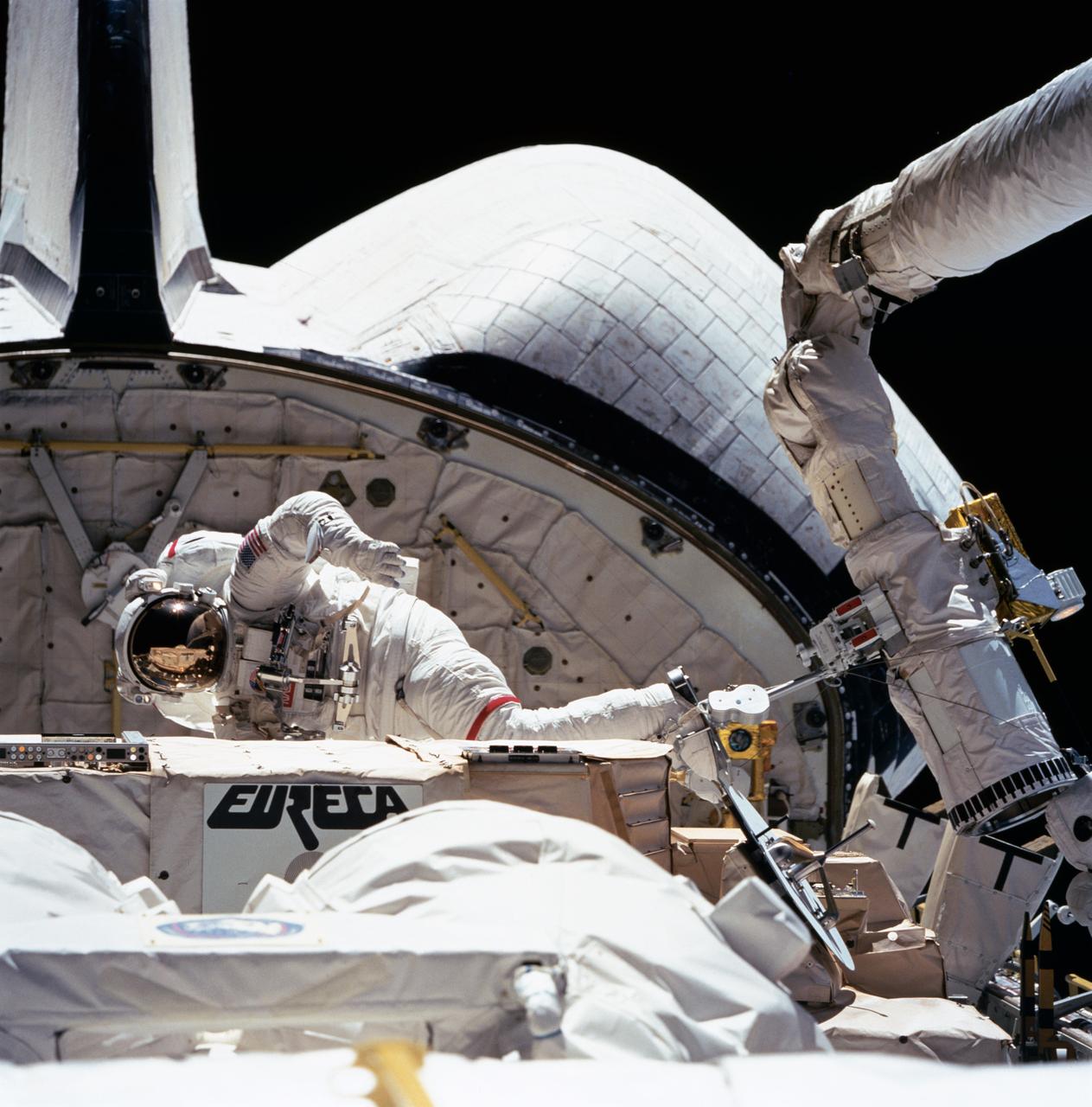
The darkness of space forms the backdrop for this extravehicular activity (EVA) scene captured by one of the STS-57 crewmembers in Endeavour's, Orbiter Vehicle (OV) 105's, crew cabin. Pictured near the recently "captured" European Retrievable Carrier (EURECA) at frame center is Mission Specialist (MS) and Payload Commander (PLC) G. David Low. Suited in an extravehicular mobility unit (EMU), Low, anchored to the remote manipulator system (RMS) via a portable foot restraint (PFR) (manipulator foot restraint (MFR)), is conducting Detailed Test Objective (DTO) 1210 procedures. Specifically, this activity will assist in refining several procedures being developed to service the Hubble Space Telescope (HST) on mission STS-61 in December 1993. The PFR is attached to the RMS end effector via a PFR attachment device (PAD). Partially visible in the foreground is the Superfluid Helium Onorbit Transfer (SHOOT) payload.

41C-52-2646 (11 April 1984) --- Astronaut James D. van Hoften and a repaired satellite are in a wide panorama recorded on film with a Linhof camera, making its initial flight aboard the Space Shuttle Challenger. Dr. van Hoften is getting in his first "field" test of the Manned Maneuvering Unit (MMU) after months of training in an underwater facility and in a simulator on Earth. The Solar Maximum Mission Satellite (SMMS), revived and almost ready for release into space once more, is docked at the Flight Support System (FSS). The Remote Manipulator System (RMS) is backdropped against the blue and white Earth at frame's edge. Outside of pictures made of the Earth from astronauts on the way to the Moon, this frame showing the planet from 285 nautical miles represents the highest orbital photography in the manned space program.

STS054-S-034 (17 Jan 1993) --- Closeup view of Runco as he works to install a mobile foot restraint during extravehicular activity (EVA) in Endeavour's cargo bay. The scene was downlinked at 11:55:07:24 GMT, Jan. 17, 1993.
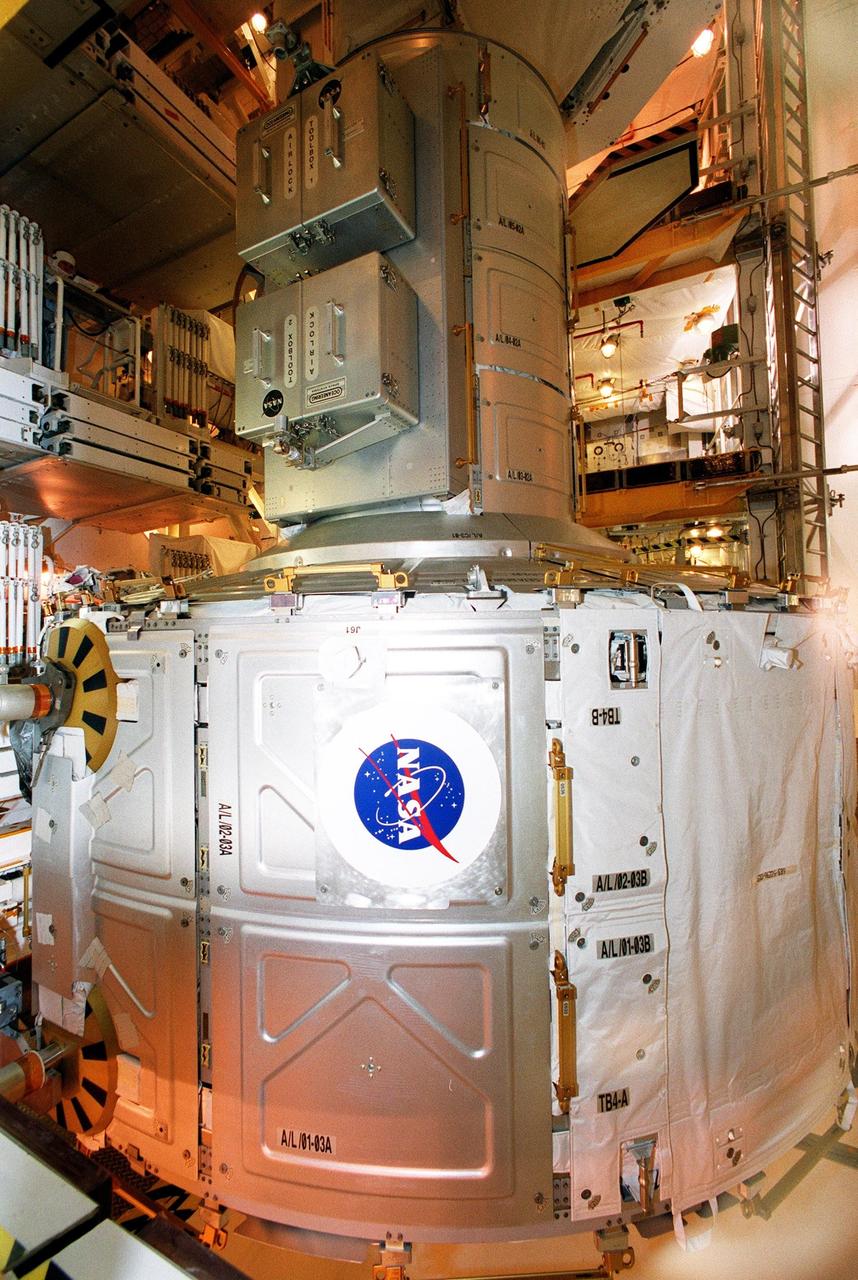
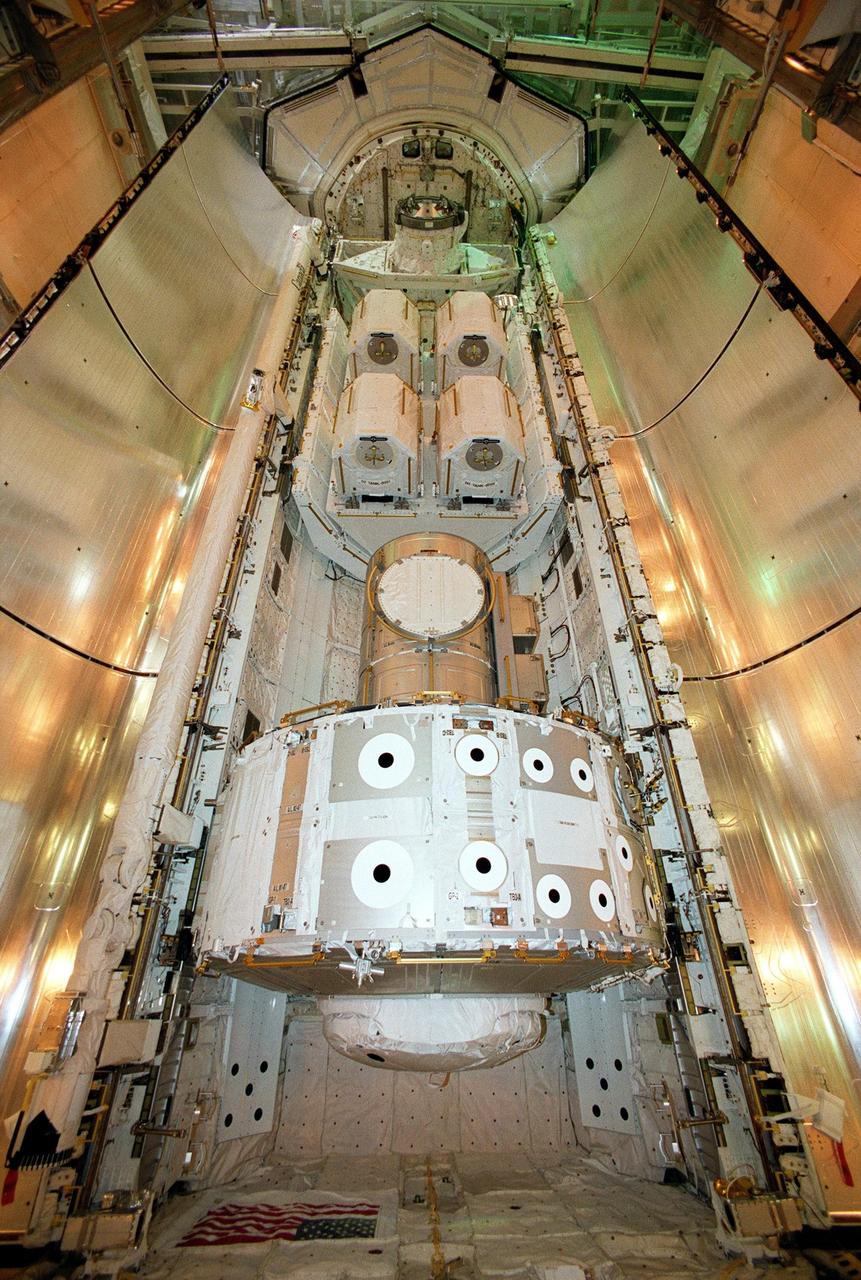
KENNEDY SPACE CENTER, Fla. -- The Joint Airlock Module rests inside Atlantis’s payload bay. The module is the primary payload on mission STS-104, scheduled to be launched July 12 for the International Space Station. The module, which comprises a crew lock and an equipment lock, will be connected to the starboard (right) side of Node 1 Unity. Once installed and activated, the Airlock becomes the primary path for Space Station spacewalk entry and departure for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity
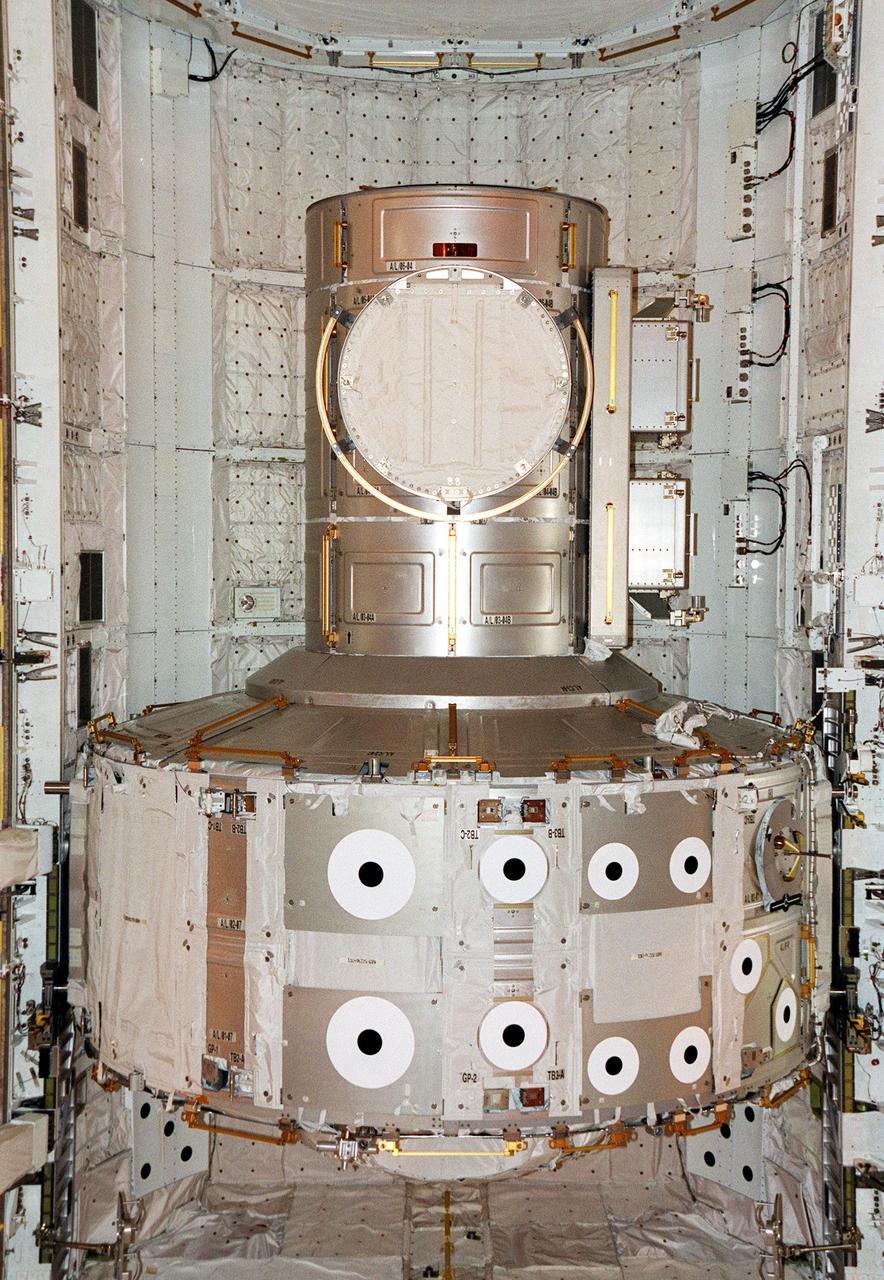
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Joint Airlock Module is moved closer to the payload canister. The airlock will be installed in the payload bay of Atlantis for mission STS-104 to the International Space Station. The airlock is a pressurized flight element consisting of two cylindrical chambers attached end-to-end by a connecting bulkhead and hatch. Once installed and activated, the Airlock becomes the primary path for spacewalk entry to and departure from the Space Station for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. STS-104 is scheduled for launch June 14 from Launch Pad 39B
STS-37 Atlantis, Orbiter Vehicle (OV) 104, Mission Specialist (MS) Jerry L. Ross generates electrical power using hand pedals to move crew and equipment translation aid (CETA) cart along a rail during underwater session in JSC's Weightless Environment Training Facility (WETF) Bldg 29. Wearing an extravehicular mobility unit (EMU), Ross operates CETA electrical cart as MS Jerome Apt holds onto the back of the cart. The two crewmembers are practicing a extravehicular activity (EVA) spacewalk they will perform in OV-104's payload bay during STS-37. CETA is a type of railroad hand cart planned as a spacewalker's transportation system along the truss of Space Station Freedom (SSF). SCUBA divers monitor astronauts' underwater activity.

ISS016-E-032711 (13/14 March 2008) --- Anchored to a Canadarm2 mobile foot restraint, astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

ISS016-E-032708 (13/14 March 2008) --- Anchored to a Canadarm2 mobile foot restraint, astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

STS049-91-020 (13 May 1992) --- The successful capture of Intelsat VI satellite is recorded over Mexico on this 70mm frame, from inside the Space Shuttle Endeavour's cabin. Left to right, astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot have handholds on the satellite. Ground coverage in the frame includes an area from Hermosillo, Sonara to Los Mochis in the state of Sinaloa. The nine-day mission accomplished the capture of the Intelsat, subsequent mating of the satellite to a booster and its eventual deployment, as well as a Space Station Freedom preview Extravehicular Activity (EVA). Endeavour's crew members were astronauts Daniel C. Brandenstein, mission commander; Kevin P. Chilton, pilot; and Thomas D. Akers, Richard J. Hieb, Bruce E. Melnick, Kathryn C. Thornton and Pierre J. Thuot, all mission specialists.
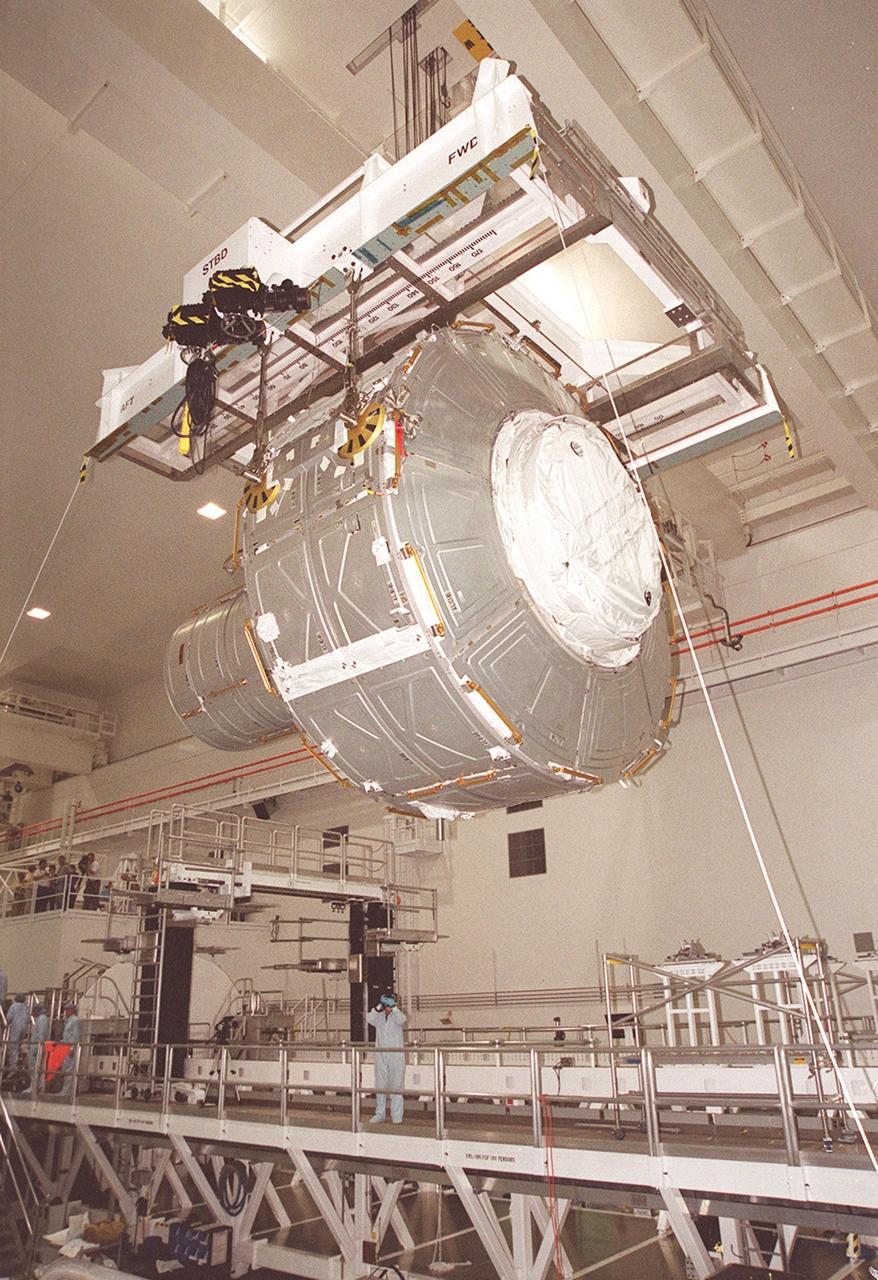
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Joint Airlock Module is lifted from its workstand for a transfer to the payload canister. The airlock will be installed in the payload bay of Atlantis for mission STS-104 to the International Space Station. The airlock is a pressurized flight element consisting of two cylindrical chambers attached end-to-end by a connecting bulkhead and hatch. Once installed and activated, the airlock becomes the primary path for spacewalk entry to and departure from the Space Station for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. STS-104 is scheduled for launch June 14 from Launch Pad 39B

KENNEDY SPACE CENTER, Fla. -- In the Payload Changeout Room, Launch Pad 39B, the Joint Airlock Module (below) and Space Lab Double Pallet (above) are moved into the payload bay of Space Shuttle Atlantis for mission STS-104. The pallet contains two oxygen and two nitrogen High-Pressure Gas Tanks, which will be attached externally to the airlock during two of the STS-104 spacewalks. Once installed and activated, the airlock becomes the primary path for International Space Station spacewalk entry and departure using U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. Launch of Atlantis is scheduled no earlier than July 12 at 5:04 a.m. EDT
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, workers standing inside the payload canister help guide the Joint Airlock Module into place. The airlock will be installed in the payload bay of Atlantis for mission STS-104 to the International Space Station. The airlock is a pressurized flight element consisting of two cylindrical chambers attached end-to-end by a connecting bulkhead and hatch. Once installed and activated, the Airlock becomes the primary path for spacewalk entry to and departure from the Space Station for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. STS-104 is scheduled for launch June 14 from Launch Pad 39B
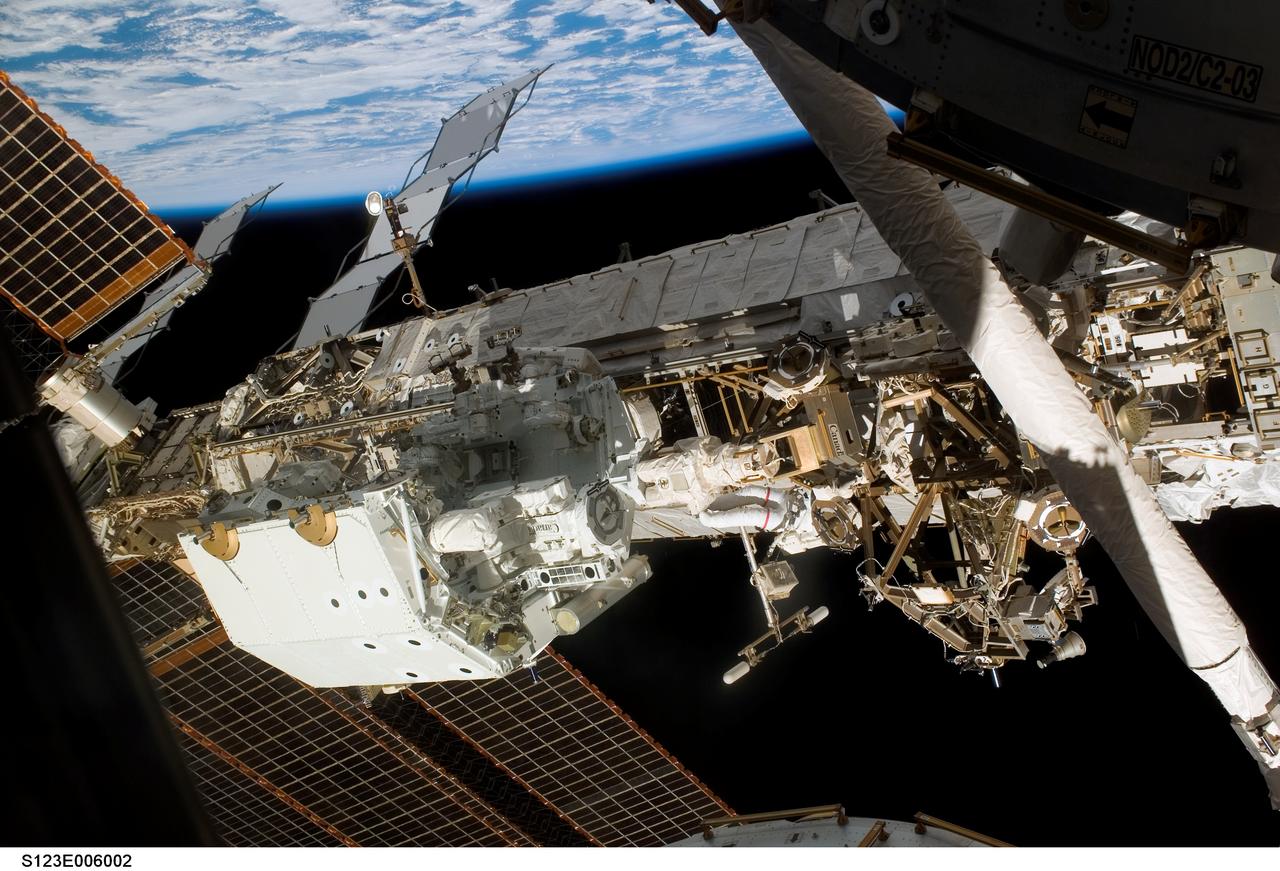
S123-E-006002 (13/14 March 2008) --- Astronaut Rick Linnehan (center), STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system (center left), the final element of the station's Mobile Servicing System.

S123-E-006087 (13/14 March 2008) --- Astronauts Rick Linnehan (right), STS-123 mission specialist; and Garrett Reisman, Expedition 16 flight engineer, participate in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and Reisman prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.
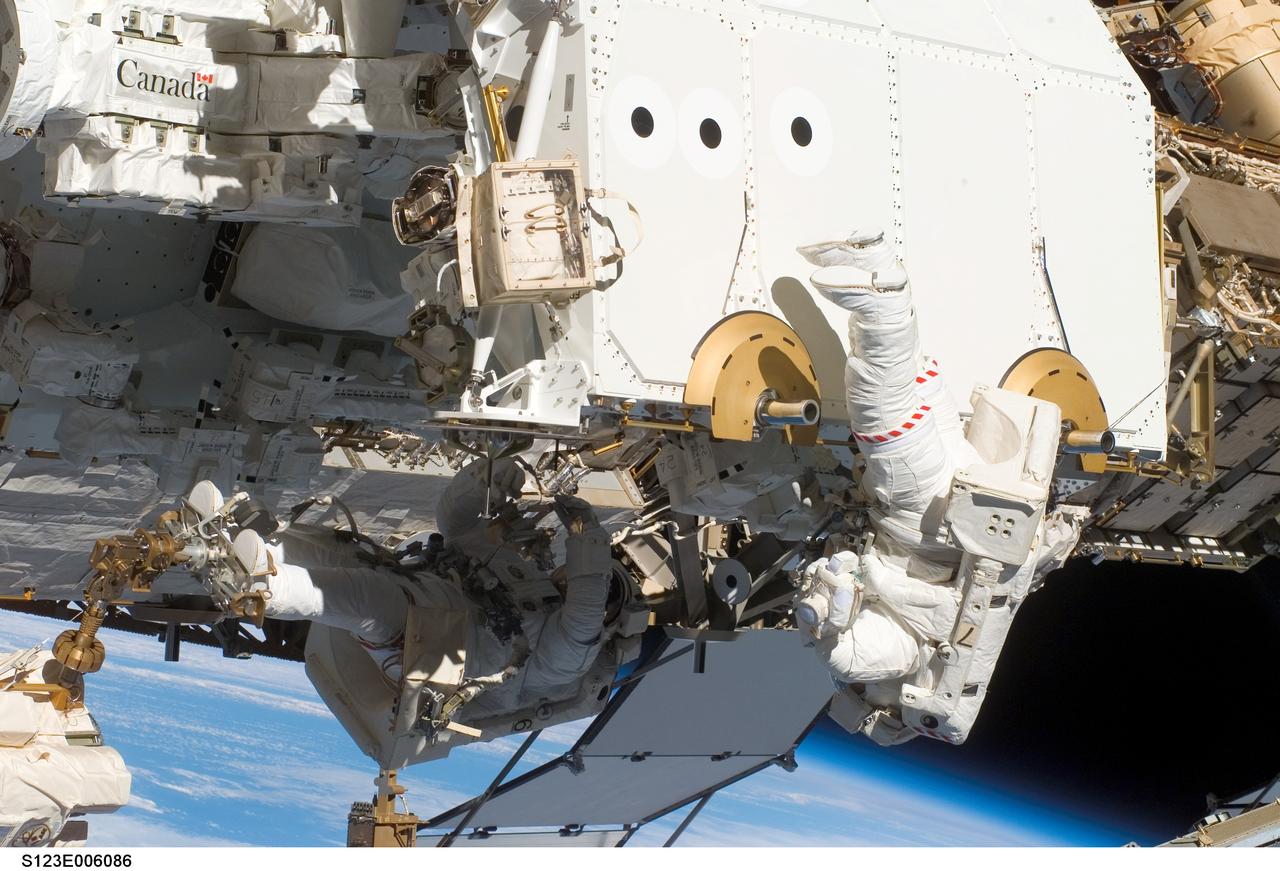
S123-E-006086 (13/14 March 2008) --- Astronauts Rick Linnehan (left), STS-123 mission specialist; and Garrett Reisman, Expedition 16 flight engineer, participate in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and Reisman prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.
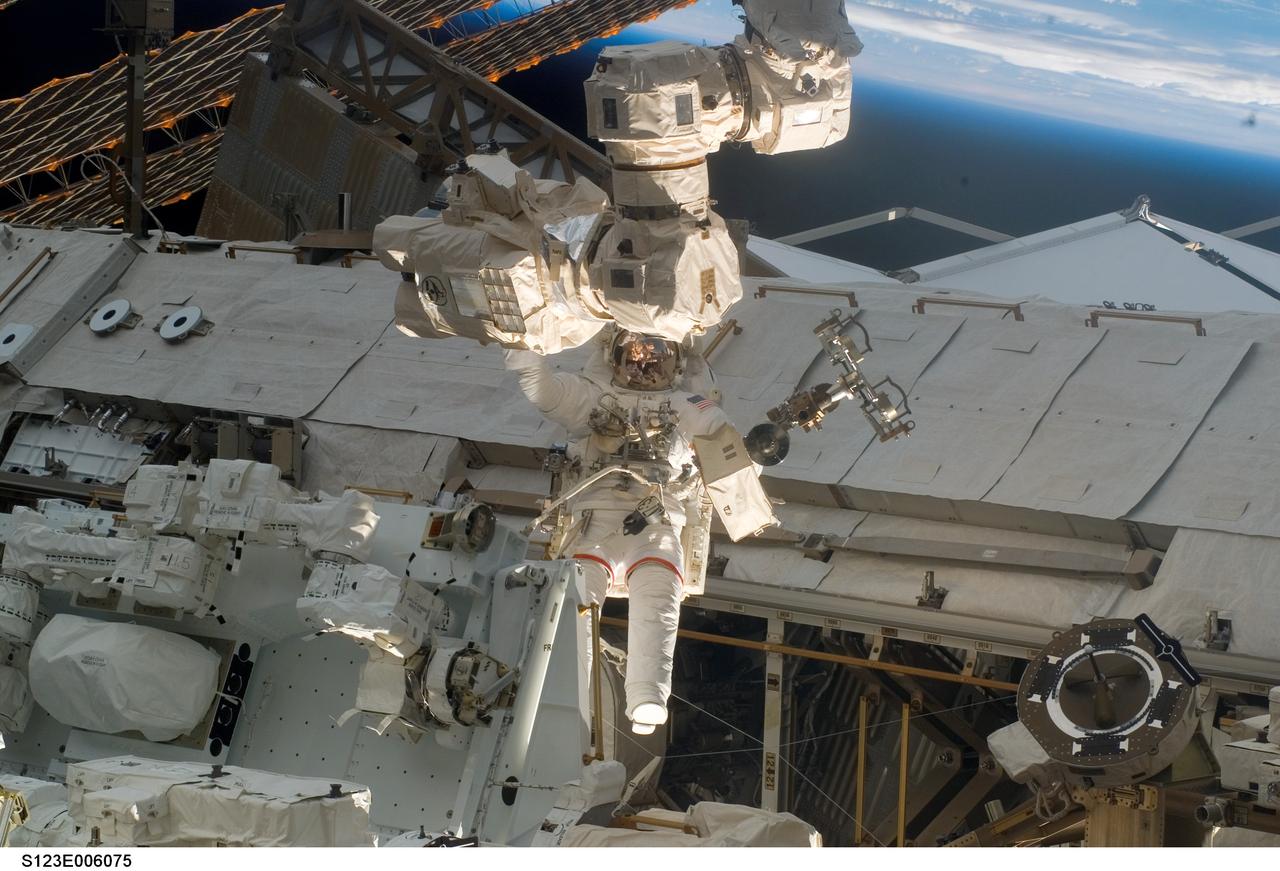
S123-E-006075 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

S123-E-006057 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System. Visible in the reflections in Reisman's visor are various components of the station and the docked Space Shuttle Endeavour.
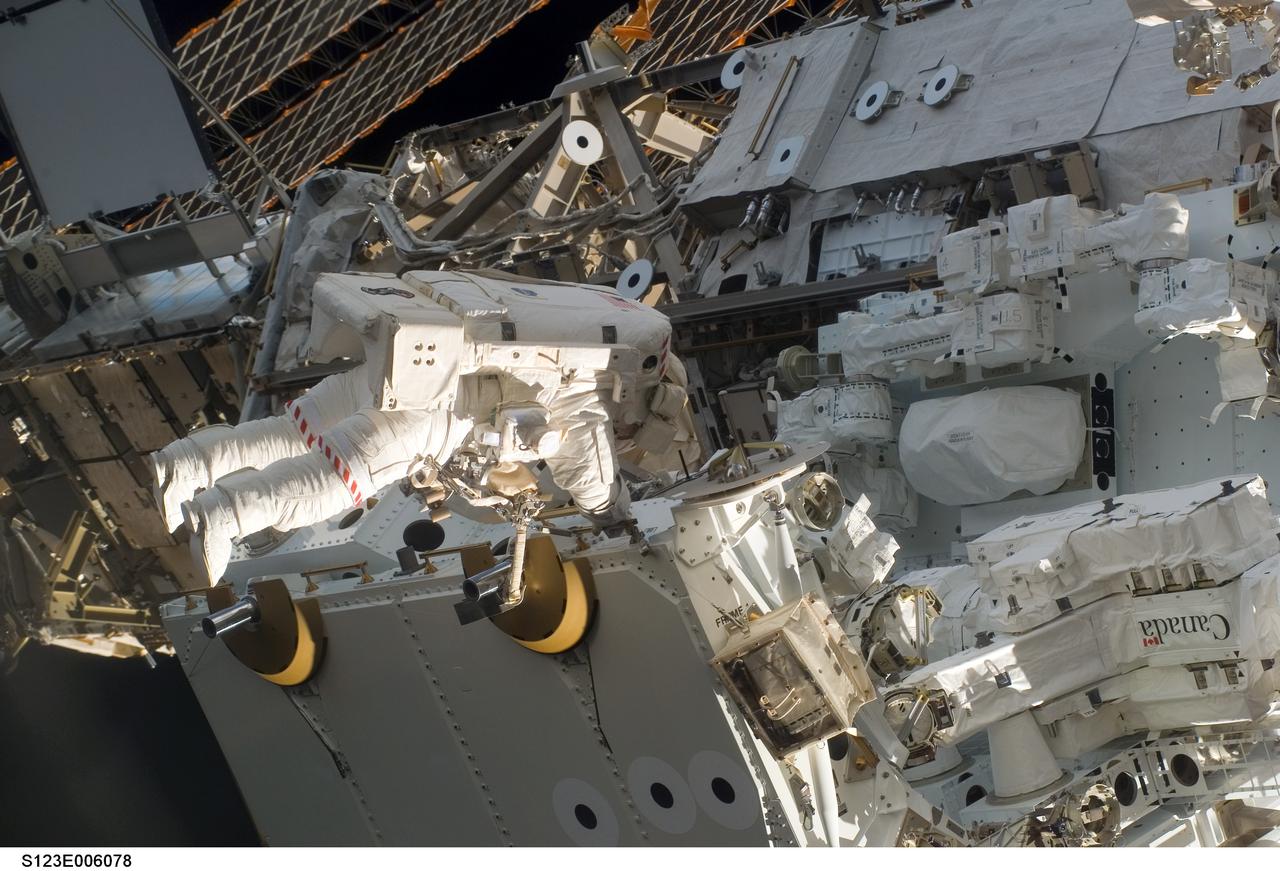
S123-E-006078 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

S123-E-006101 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

ISS016-E-032695 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.
S123-E-006090 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

S123-E-006089 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

S123-E-006082 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

ISS016-E-032702 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.
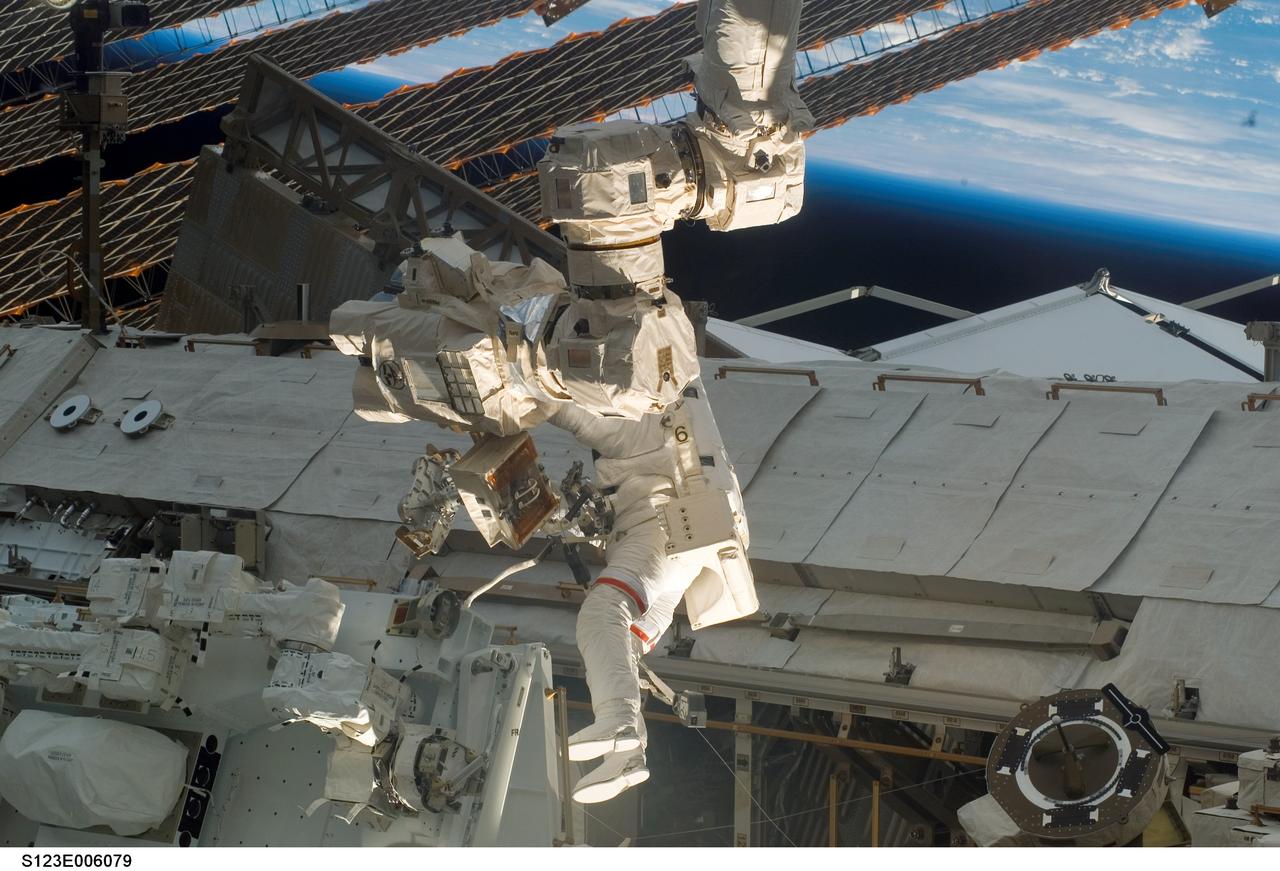
S123-E-006079 (13/14 March 2008) --- Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Linnehan and astronaut Garrett Reisman (out of frame), Expedition 16 flight engineer, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.
KENNEDY SPACE CENTER, Fla. -- Resting inside Atlantis’s payload bay are the Joint Airlock Module (bottom) and pallet containing the high pressure gas assembly (above). Both are heading for the International Space Station on mission STS-104, scheduled to be launched July 12. The module, which comprises a crew lock and an equipment lock, will be connected to the starboard (right) side of Node 1 Unity. Once installed and activated, the Airlock becomes the primary path for Space Station spacewalk entry and departure for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. The high pressure gas assembly will support future spacewalk operations from the Space Station and augment the Service Module gas resupply system
KENNEDY SPACE CENTER, Fla. -- Resting inside Atlantis’s payload bay are the Joint Airlock Module (bottom) and pallet containing the high pressure gas assembly (above). Both are heading for the International Space Station on mission STS-104, scheduled to be launched July 12. The module, which comprises a crew lock and an equipment lock, will be connected to the starboard (right) side of Node 1 Unity. Once installed and activated, the Airlock becomes the primary path for Space Station spacewalk entry and departure for U.S. spacesuits, which are known as Extravehicular Mobility Units, or EMUs. In addition, the Joint Airlock is designed to support the Russian Orlan spacesuit for EVA activity. The high pressure gas assembly will support future spacewalk operations from the Space Station and augment the Service Module gas resupply system

S123-E-005981 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the STS-123 mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) (top left) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System. The blackness of space and a blue and white Earth provide the backdrop for the scene.
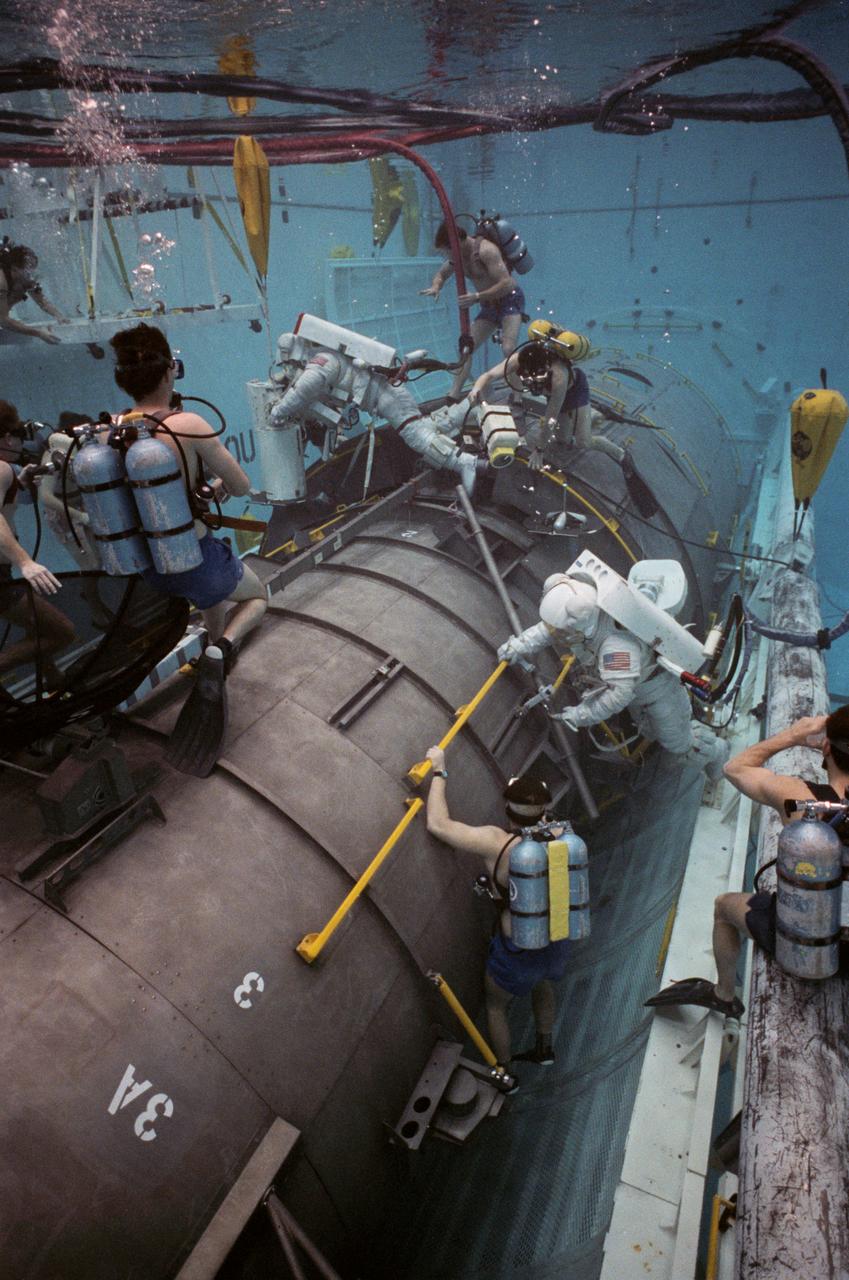
This overall view shows STS-31 Mission Specialist (MS) Bruce McCandless II (left) and MS Kathryn D. Sullivan making a practice space walk in JSC's Weightless Environment Training Facility (WETF) Bldg 29 pool. McCandless works with a mockup of the remote manipulator system (RMS) end effector which is attached to a grapple fixture on the Hubble Space Telescope (HST) mockup. Sullivan manipulates HST hardware on the Support System Module (SSM) forward shell. SCUBA-equipped divers monitor the extravehicular mobility unit (EMU) suited crewmembers during this simulated extravehicular activity (EVA). No EVA is planned for the Hubble Space Telescope (HST) deployment, but the duo has trained for contingencies which might arise during the STS-31 mission aboard Discovery, Orbiter Vehicle (OV) 103. Photo taken by NASA JSC photographer Sheri Dunnette.

ISS016-E-032705 (13/14 March 2008) --- Astronaut Garrett Reisman, Expedition 16 flight engineer, uses a digital camera to expose a photo of his helmet visor during the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. Also visible in the reflections in the visor are various components of the station, the docked Space Shuttle Endeavour and a blue and white portion of Earth. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System.

Flight Crew Systems Technicians Ray Smith and Raphael Rodriguez remove one of the Extravehicular Mobility Units, or EMUs, from the Space Shuttle Discovery after it's successful landing at NASA's Dryden Flight Research Center. The Space Shuttles receive post-flight servicing in the Mate-Demate Device (MDD) following landings at NASA's Dryden Flight Research Center, Edwards, California. The gantry-like MDD structure is used for servicing the shuttle orbiters in preparation for their ferry flight back to the Kennedy Space Center in Florida, including mounting the shuttle atop NASA's modified Boeing 747 Shuttle Carrier Aircraft. Space Shuttle Discovery landed safely at NASA's Dryden Flight Research Center at Edwards Air Force Base in California at 5:11:22 a.m. PDT, August 9, 2005, following the very successful 14-day STS-114 return to flight mission. During their two weeks in space, Commander Eileen Collins and her six crewmates tested out new safety procedures and delivered supplies and equipment the International Space Station. Discovery spent two weeks in space, where the crew demonstrated new methods to inspect and repair the Shuttle in orbit. The crew also delivered supplies, outfitted and performed maintenance on the International Space Station. A number of these tasks were conducted during three spacewalks. In an unprecedented event, spacewalkers were called upon to remove protruding gap fillers from the heat shield on Discovery's underbelly. In other spacewalk activities, astronauts installed an external platform onto the Station's Quest Airlock and replaced one of the orbital outpost's Control Moment Gyroscopes. Inside the Station, the STS-114 crew conducted joint operations with the Expedition 11 crew. They unloaded fresh supplies from the Shuttle and the Raffaello Multi-Purpose Logistics Module. Before Discovery undocked, the crews filled Raffeallo with unneeded items and returned to Shuttle payload bay. Discovery launched on July 26 and spent almost 14