
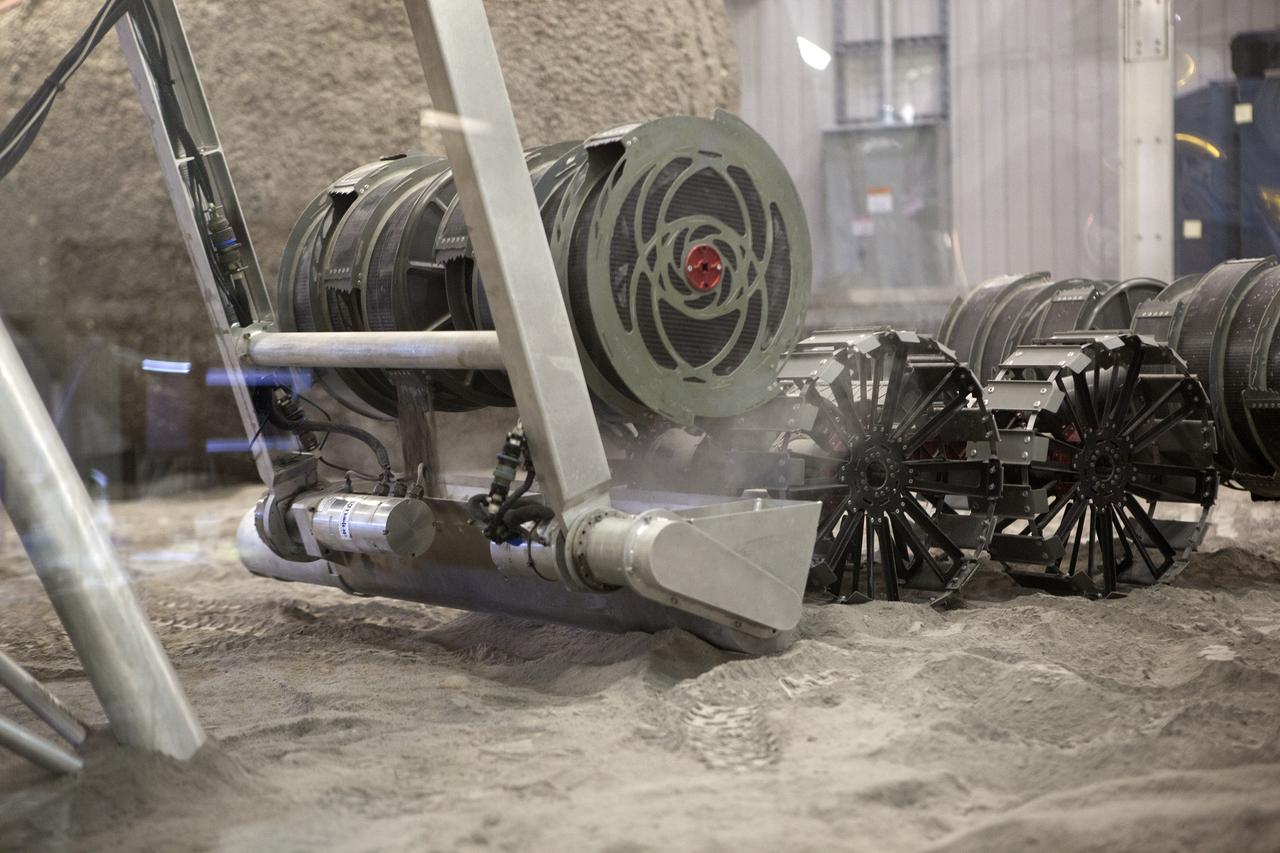
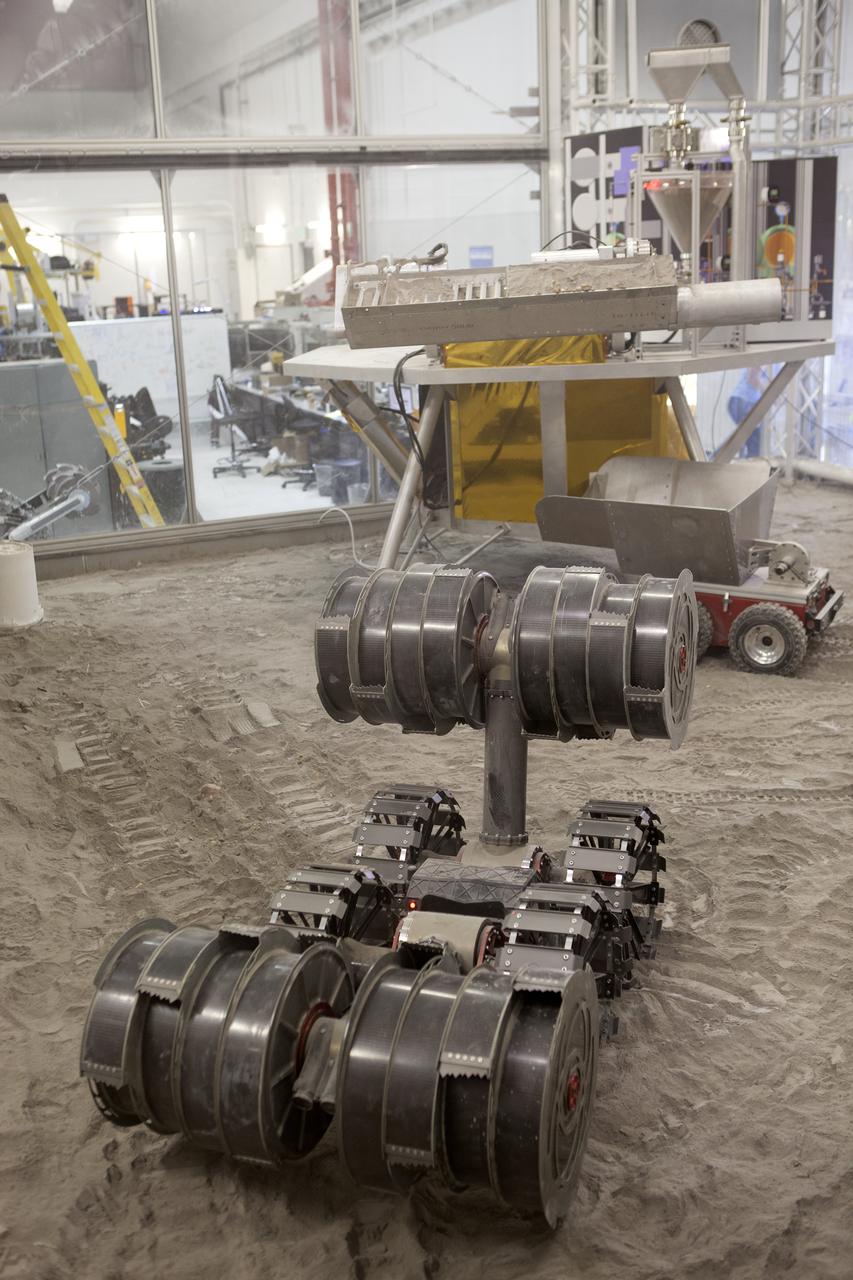
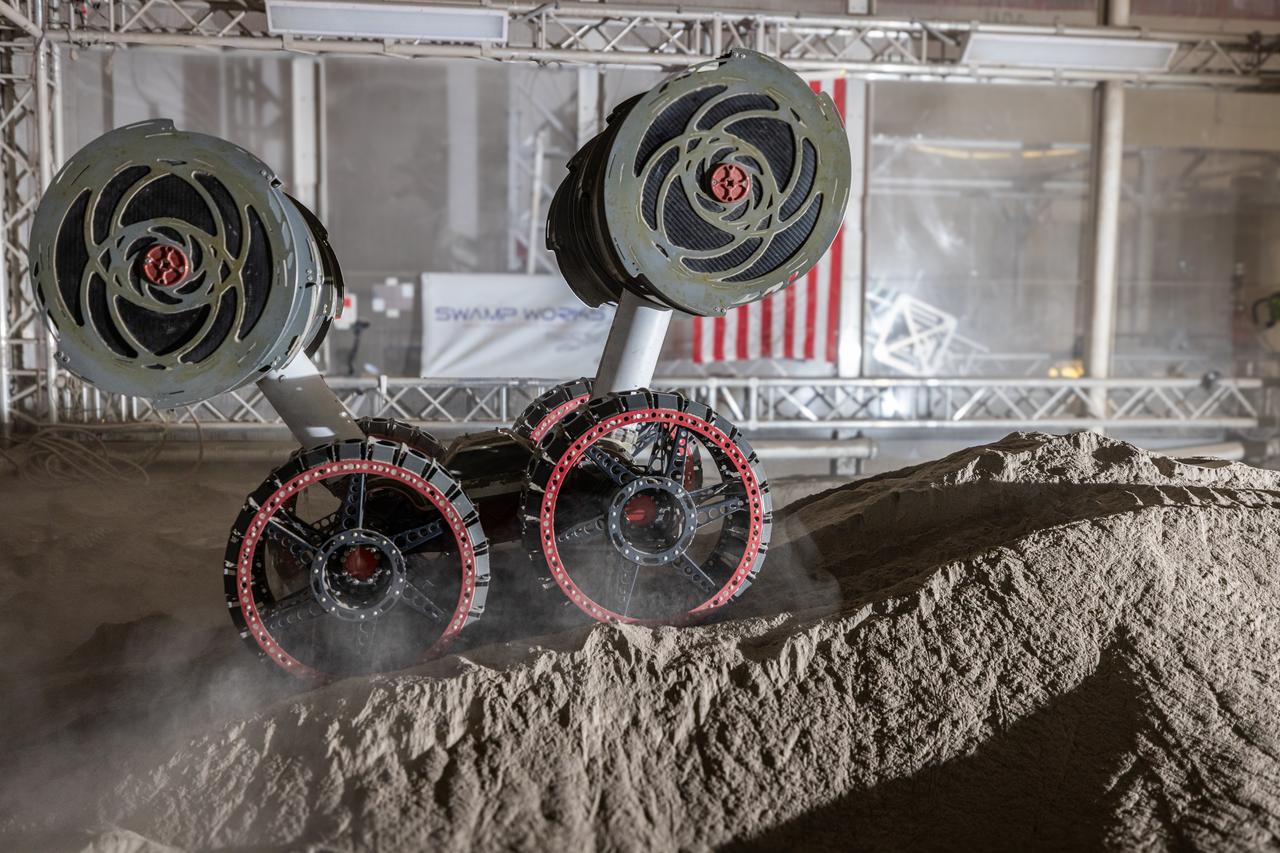
An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.
An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.
An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

An integrated test of the MARCO POLO/Mars Pathfinder in-situ resource utilization, or ISRU, system takes place at NASA’s Kennedy Space Center in Florida. A mockup of MARCO POLO, an ISRU propellant production technology demonstration simulated mission, is tested in a regolith bin with RASSOR 2.0, the Regolith Advanced Surface Systems Operations Robot. On the surface of Mars, mining robots like RASSOR will dig down into the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. Regolith also shows promise for both construction and creating elements for rocket fuel.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

Ben Burdess, mechanical engineer, observes NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

AJ Nick, a robotic engineer with the Granular Mechanics and Regolith Operations Lab, monitors the Regolith Advanced Surface Systems Operations Robot (RASSOR) from a control room during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

CAPE CANAVERAL, Fla. – A visitor to the Robot Rocket Rally takes an up-close look at RASSOR, a robotic miner developed by NASA Kennedy Space Center's Swamp Works. The three-day event at Florida's Kennedy Space Center Visitor Complex is highlighted by exhibits, games and demonstrations of a variety of robots, with exhibitors ranging from school robotics clubs to veteran NASA scientists and engineers. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – Andrew Nick of Kennedy Space Center's Swamp Works shows off RASSOR, a robotic miner, at the Robot Rocket Rally. The three-day event at Florida's Kennedy Space Center Visitor Complex is highlighted by exhibits, games and demonstrations of a variety of robots, with exhibitors ranging from school robotics clubs to veteran NASA scientists and engineers. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. -- NASA's Regolith Advanced Surface Systems Operations Robot, or RASSOR, is ready to demonstrate its unique skills during a media tour of the Granular Mechanics and Regolith Operations, or GMRO, Lab in the Swamp Works at NASA's Kennedy Space Center in Florida. RASSOR, lunar soil excavator, resembles a small tank chassis with a drum at either end, each attached with arms. The drums, one of the robot's most innovative feature, are mounted on moving arms, allowing the robot to step and climb over obstacles. Kennedy's Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy's research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Frankie Martin
The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.

The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.
The Astrobotic CubeRover traverses the terrain in the Granular Mechanics and Regolith Operations Lab regolith bin at NASA’s Kennedy Space Center in Florida on Dec. 10, 2020. The regolith bin simulates the mechanical properties of the Moon’s surface. NASA and Astrobotic employees put the CubeRover through a series of more than 150 mobility tests over several days to evaluate and improve wheel design. Also in the bin is NASA’s Regolith Advanced Surface Systems Operations Robot (RASSOR), a robotic platform designed to dig on the Moon. The regolith bin simulates the Moon’s surface.

CAPE CANAVERAL, Fla. – At NASA’s Kennedy Space Center in Florida, Robert Lightfoot, NASA associate director, learns about the Regolith Advanced Surface Systems Operations Robot, or RASSOR, Excavator during a tour of the Swamp Works laboratories. Kennedy’s Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy’s research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Jim Grossmann

Rob Mueller, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, demonstrates the Regolith Advanced Surface System Operations Robot, or RASSOR, during a media event at Kennedy's automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST.

Members of the media watch a demonstration of the Regolith Advanced Surface System Operations Robot, or RASSOR, during a media event at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. Tom Engler, center, in the suit, deputy director of Kennedy's Center Planning and Development, announced Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST.

CAPE CANAVERAL, Fla. - Rob Mueller, left, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, talks with former NASA Apollo astronaut Buzz Aldrin during a demonstration of the Regolith Advanced Surface Systems Operations Robot, or RASSOR, at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST. Photo credit: NASA/Ben Smegelsky

CAPE CANAVERAL, Fla. - Rob Mueller, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, demonstrates the Regolith Advanced Surface System Operations Robot, or RASSOR, during a media event at Kennedy's automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST. Photo credit: NASA/Ben Smegelsky

Rob Mueller, left, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, talks with former NASA Apollo astronaut Buzz Aldrin during a demonstration of the Regolith Advanced Surface System Operations Robot, or RASSOR, at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST.

CAPE CANAVERAL, Fla. - Rob Mueller, left, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, talks with former NASA Apollo astronaut Buzz Aldrin during a demonstration of the Regolith Advanced Surface System Operations Robot, or RASSOR, at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST. Photo credit: NASA/Ben Smegelsky

CAPE CANAVERAL, Fla. -- Dr. Phil Metzger, at right, a principal investigator in the Surface Systems Office, discusses some of NASA's cutting-edge projects with media representatives touring the Granular Mechanics and Regolith Operations, or GMRO, Lab in the Swamp Works at NASA's Kennedy Space Center in Florida. The GMRO team develops robotics to excavate regolith and ice as resources and to prepare berms, roads and landing pads. The laboratory also studies the physics of blowing rego¬lith and other materials in a rocket exhaust plume to predict and mitigate the blast effects of launches and landings. The team performed a demonstration of the Regolith Advanced Surface Systems Operations Robot, or RASSOR, for the media. Kennedy's Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy's research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Frankie Martin

Rob Mueller, left, NASA senior technologist in the Surface Systems Office in Kennedy Space Center's Engineering and Technology Directorate, talks with former NASA Apollo astronaut Buzz Aldrin during a demonstration of the Regolith Advanced Surface Systems Operations Robot, or RASSOR, at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. The event was held to announce Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST.

CAPE CANAVERAL, Fla. - Members of the media watch a demonstration of the Regolith Advanced Surface System Operations Robot, or RASSOR, during a media event at the automated landing and hazard avoidance technology, or ALHAT, hazard field at the north end of the Shuttle Landing Facility at NASA's Kennedy Space Center in Florida. Tom Engler, center, in the suit, deputy director of Kennedy's Center Planning and Development, announced Moon Express Inc., of Moffett Field, California is selected to utilize Kennedy facilities for NASA's Lunar Cargo Transportation and Landing by Soft Touchdown, or Lunar CATALYST, initiative. Moon Express is developing a lander with capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities. Moon Express will base its activities at Kennedy and utilize the Morpheus ALHAT field and a hangar nearby for CATALYST testing. The Advanced Exploration Systems Division of NASA's Human Exploration and Operations Mission Directorate manages Lunar CATALYST. Photo credit: NASA/Ben Smegelsky

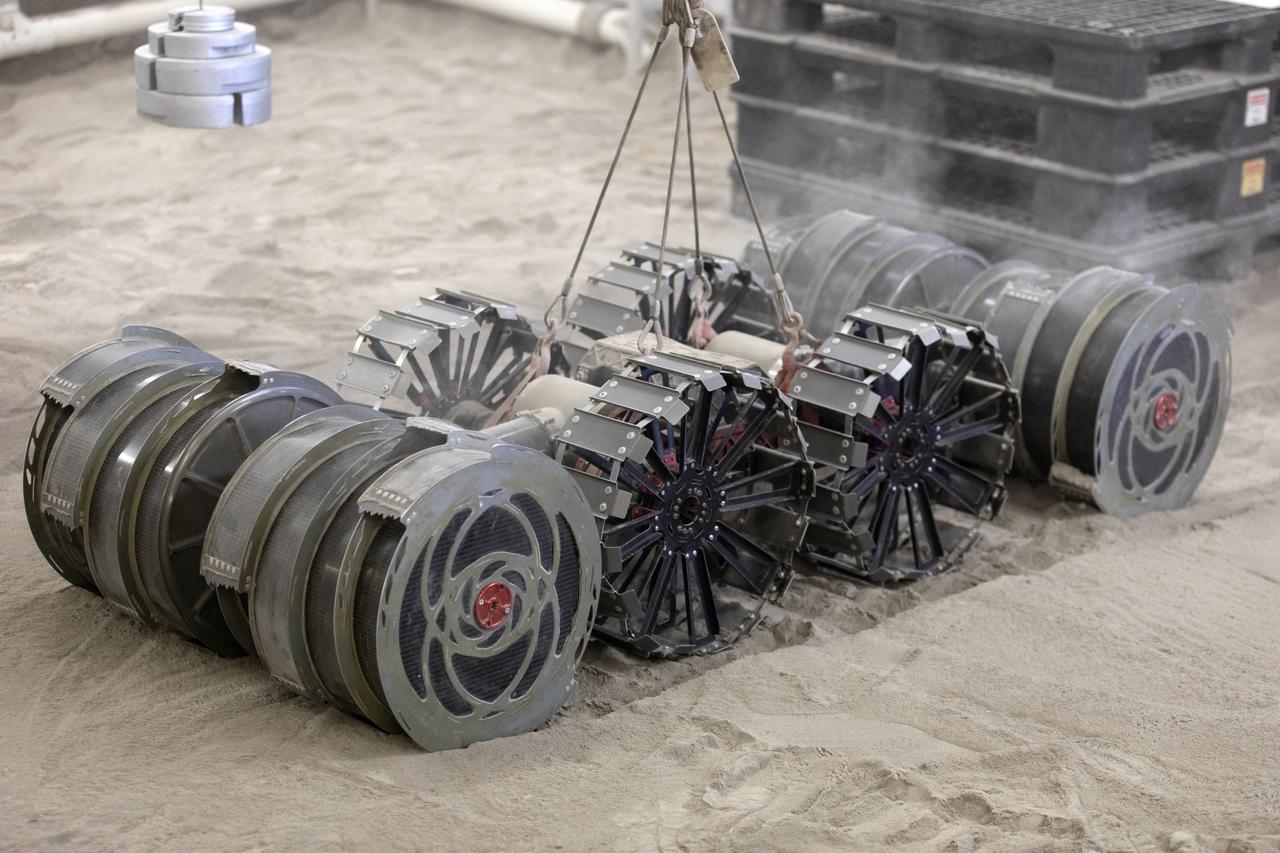
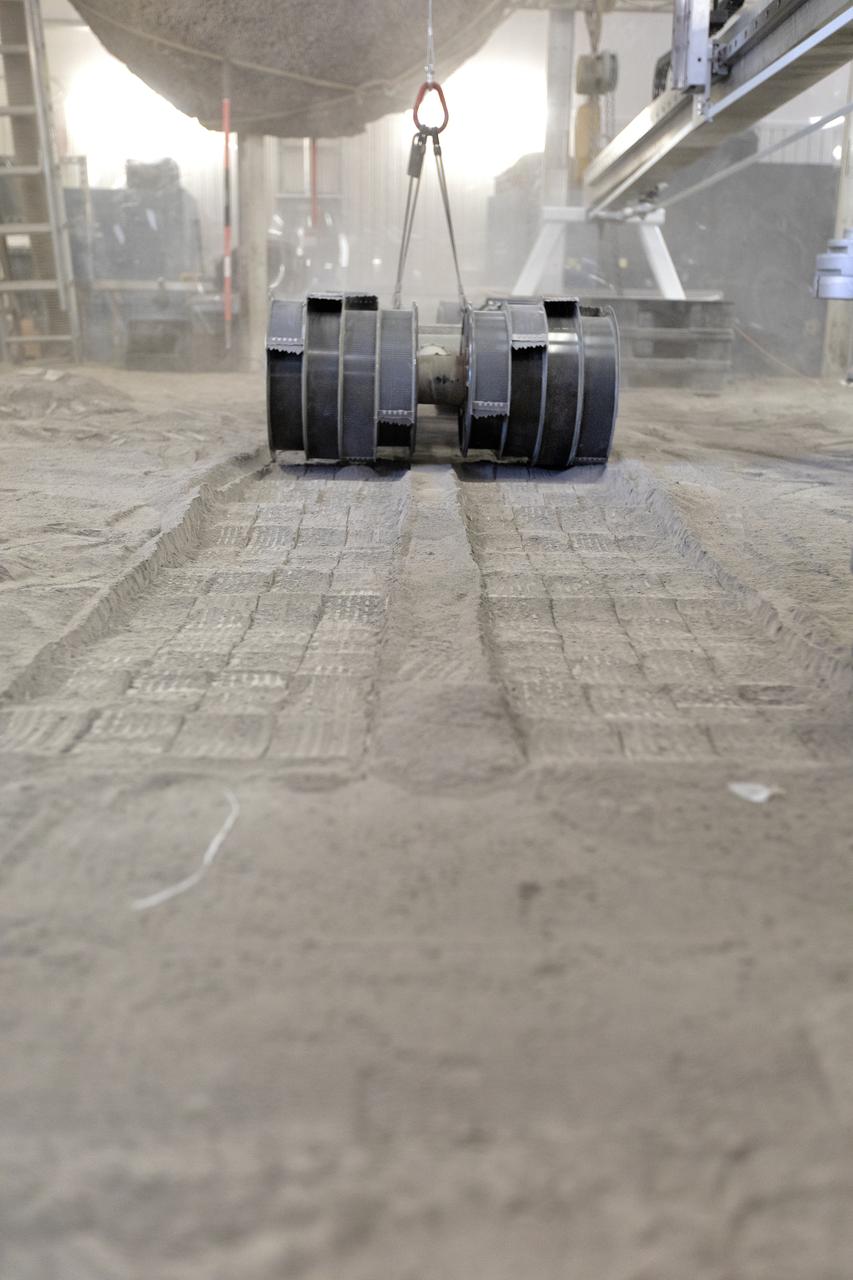
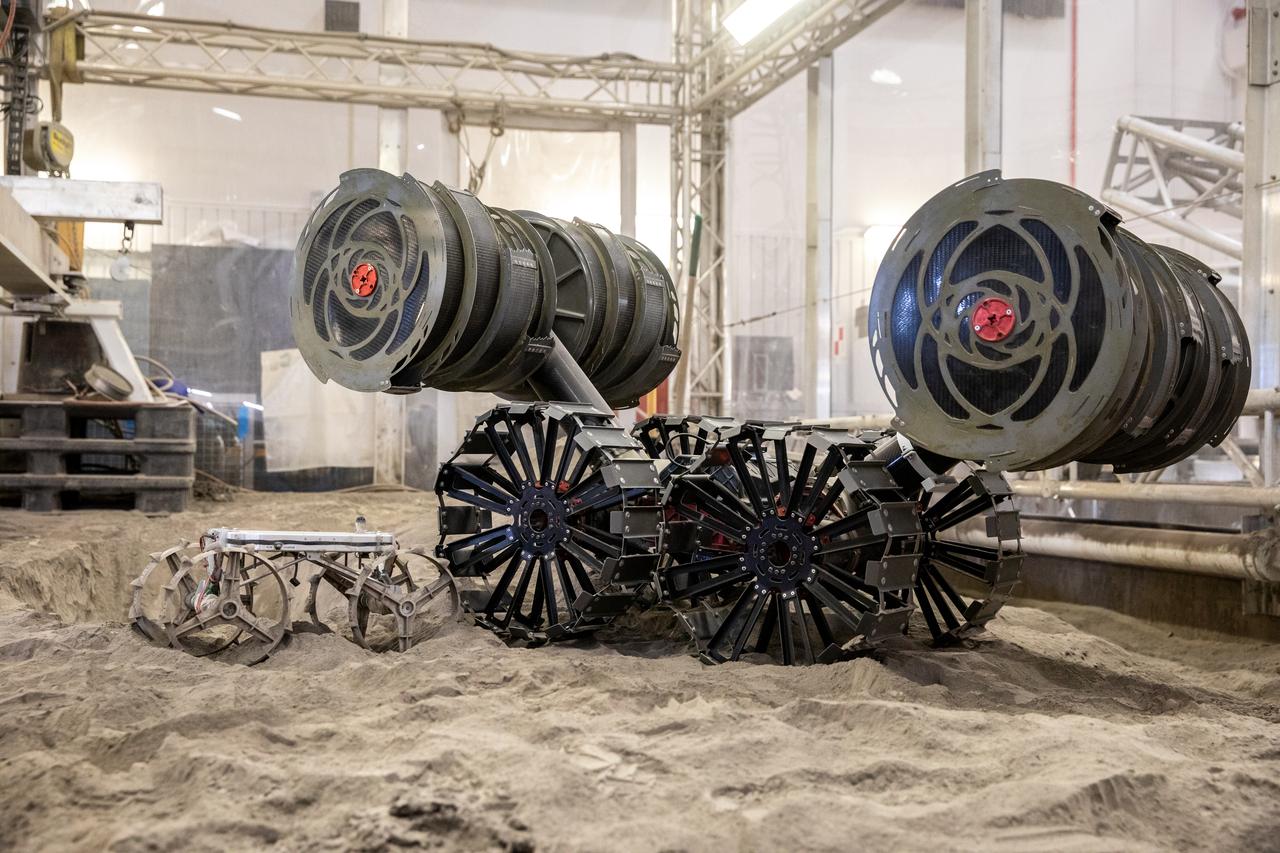
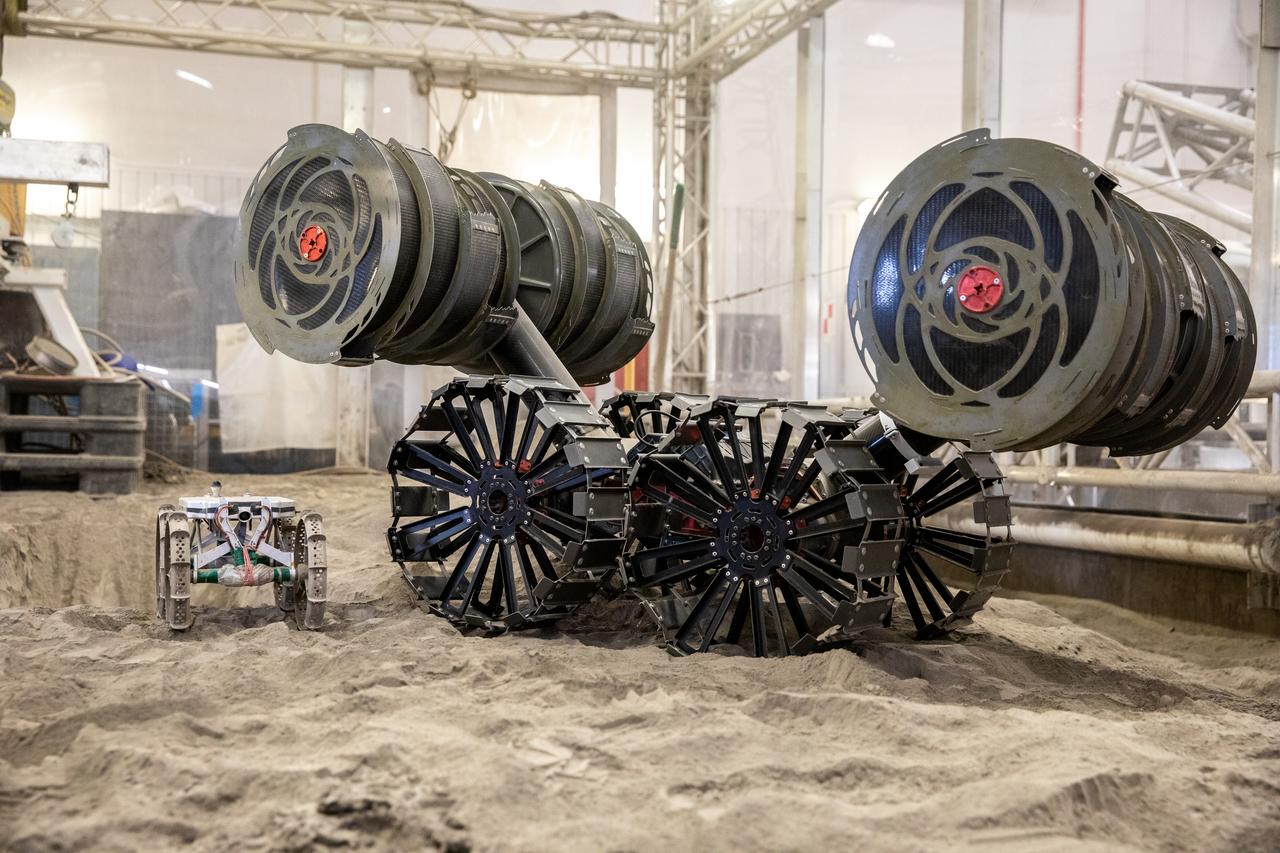
A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.
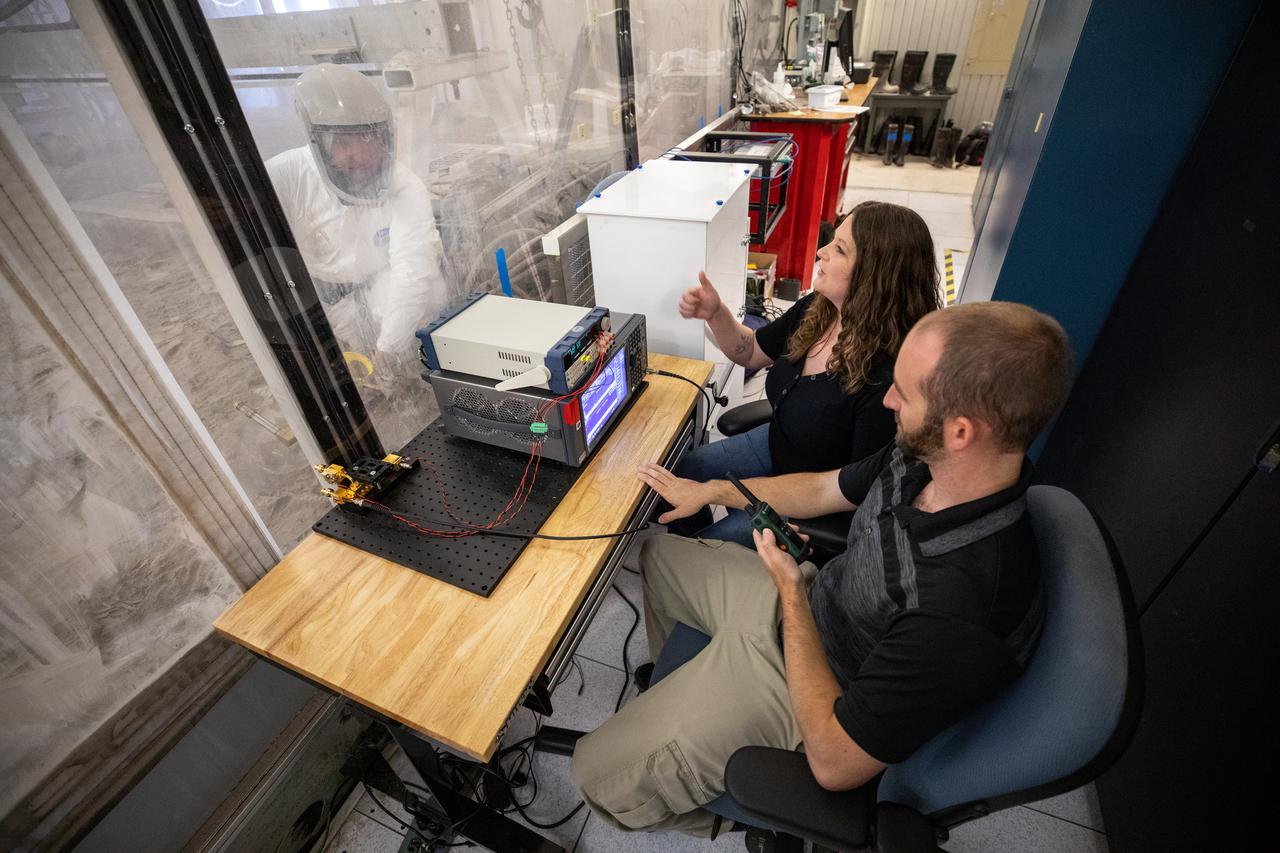
Beverly Kemmerer and Austin Adkins, right, and Austin Langton, perform testing with a Millimeter Wave Doppler Radar at NASA’s Kennedy Space Center’s Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing at the Florida spaceport is part of a project to identify a suite of instrumentation capable of acquiring a comprehensive set of flight data from a lunar lander. Researchers at NASA will use that data to validate computational models being developed to predict plume surface interaction effects on the Moon.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

Austin Langton, a researcher at NASA's Kennedy Space Center in Florida, creates a fine spray of the regolith simulant BP-1, to perform testing with a Millimeter Wave Doppler Radar at the Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing occurred inside the "Big Bin," an enclosure at Swamp Works that holds 120 tons of regolith simulant. The testing at the Florida spaceport is part of a project to predict plume surface interaction effects on the Moon, with testing happening at Kennedy, and NASA's Marshal Space Flight Center and Glenn Research Center.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.
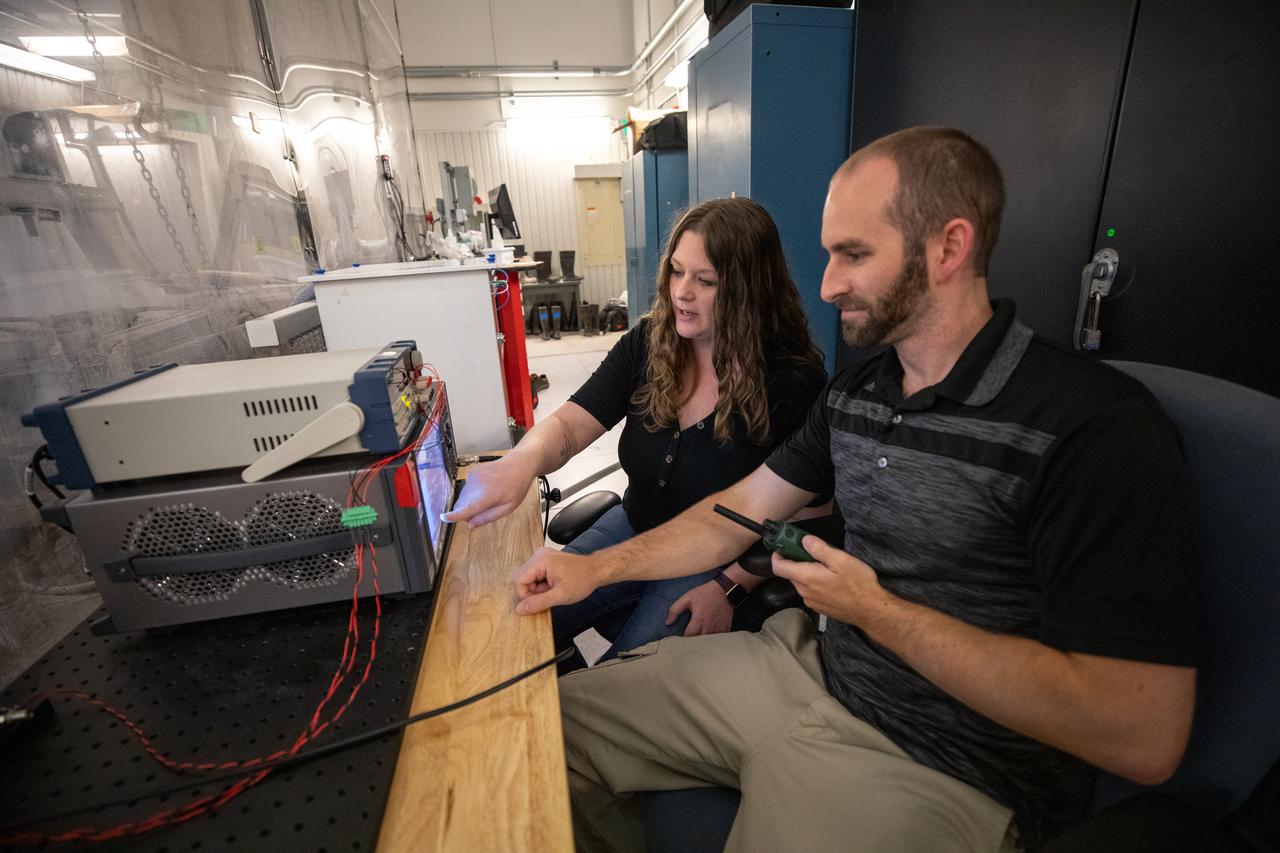
Beverly Kemmerer and Austin Adkins perform testing with a Millimeter Wave Doppler Radar at NASA’s Kennedy Space Center’s Granular Mechanics and Regolith Operations Lab on July 16, 2021. The testing at the Florida spaceport is part of a project to identify a suite of instrumentation capable of acquiring a comprehensive set of flight data from a lunar lander. Researchers at NASA will use that data to validate computational models being developed to predict plume surface interaction effects on the Moon.