
NASA image acquired October 23, 2009. At NASA’s Dryden Research Center in California, a group of engineers, scientists, and aviation technicians have set up camp in a noisy, chilly hangar on Edwards Air Force base. For the past two weeks, they have been working to mount equipment—from HD video cameras to ozone sensors—onto NASA’s Global Hawk, a remote-controlled airplane that can fly for up to 30 hours at altitudes up to 65,000 feet. The team is gearing up for the Global Hawk Pacific campaign, a series of four or five scientific research flights that will take the Global Hawk over the Pacific Ocean and Arctic regions. The 44-foot-long aircraft, with its comically large nose and 116-foot wingspan is pictured in the photograph above, banking for landing over Rogers Dry Lake in California at the end of a test flight on October 23, 2009. The long wings carry the plane’s fuel, and the bulbous nose is one of the payload bays, which house the science instruments. For the Global Hawk Pacific campaign, the robotic aircraft will carry ten science instruments that will sample the chemical composition of air in the troposphere (the atmospheric layer closest to Earth) and the stratosphere (the layer above the troposphere). The mission will also observe clouds and aerosol particles in the troposphere. The primary purpose of the mission is to collect observations that can be used to check the accuracy of simultaneous observations collected by NASA’s Aura satellite. Co-lead scientist Paul Newman from Goddard Space Flight Center is writing about the ground-breaking mission for the Earth Observatory’s Notes from the Field blog. NASA Photograph by Carla Thomas. <b><a href="http://www.nasa.gov/centers/goddard/home/index.html" rel="nofollow">NASA Goddard Space Flight Center</a></b> is home to the nation's largest organization of combined scientists, engineers and technologists that build spacecraft, instruments and new technology to study the Earth, the sun, our solar system, and the universe. To learn more about this image go to: <a href="http://earthobservatory.nasa.gov/IOTD/view.php?id=43291" rel="nofollow">earthobservatory.nasa.gov/IOTD/view.php?id=43291</a>
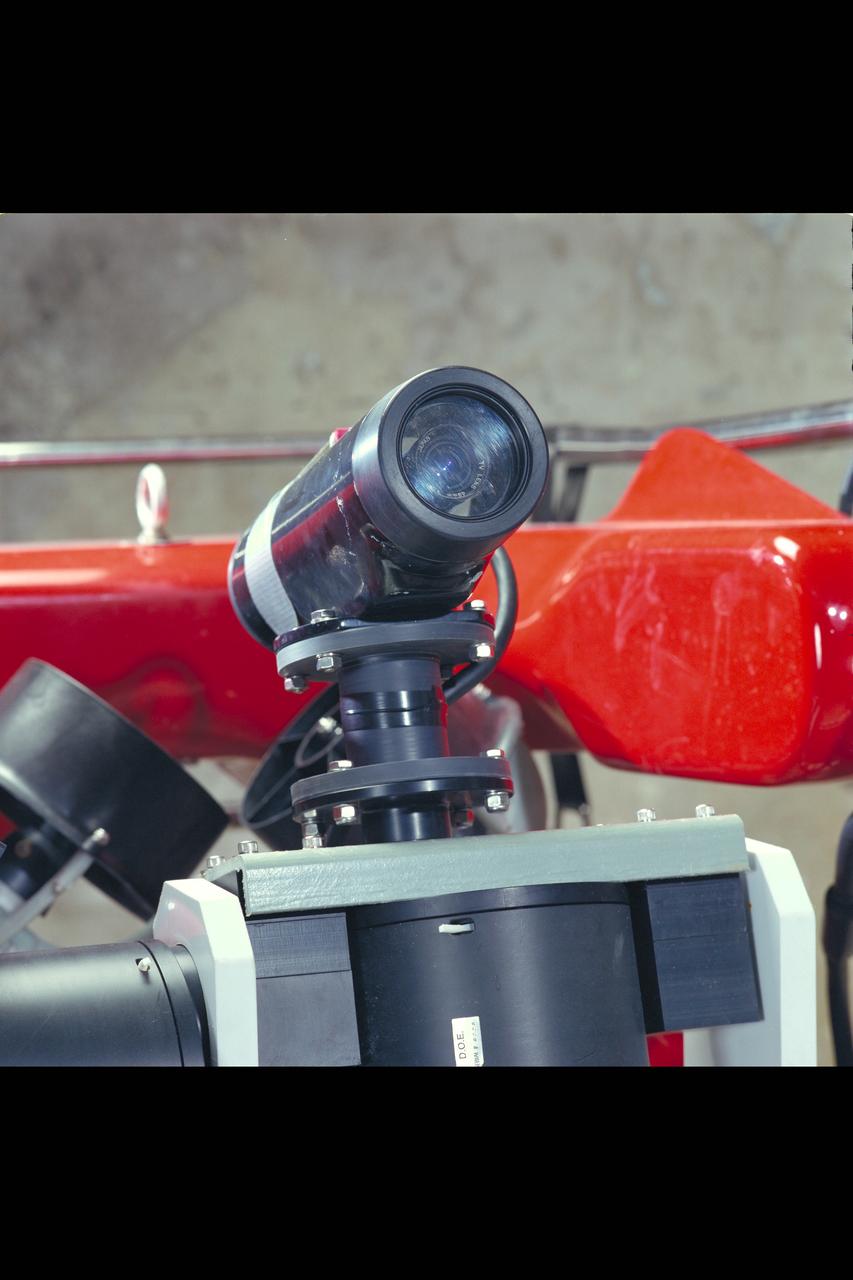
NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle) cameras

NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle) - helmet head piece

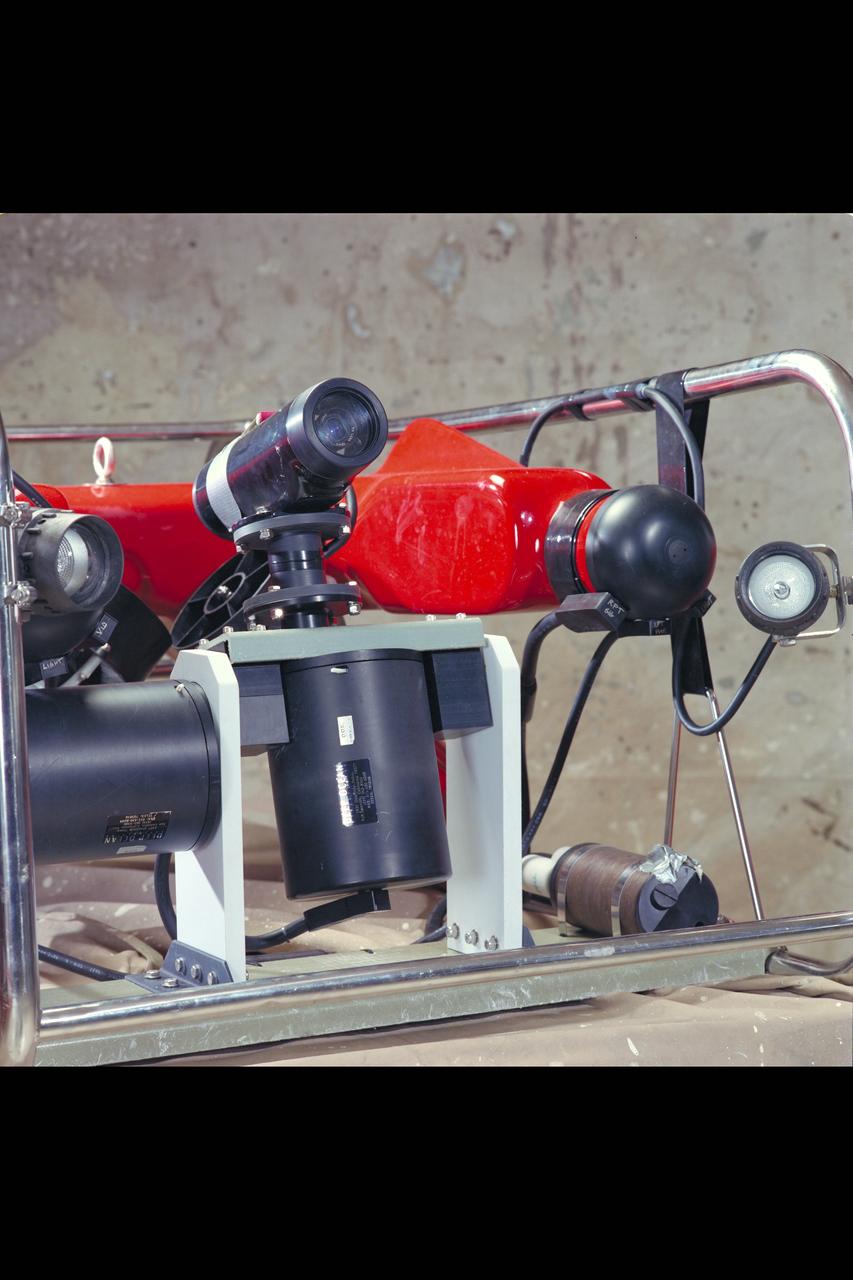
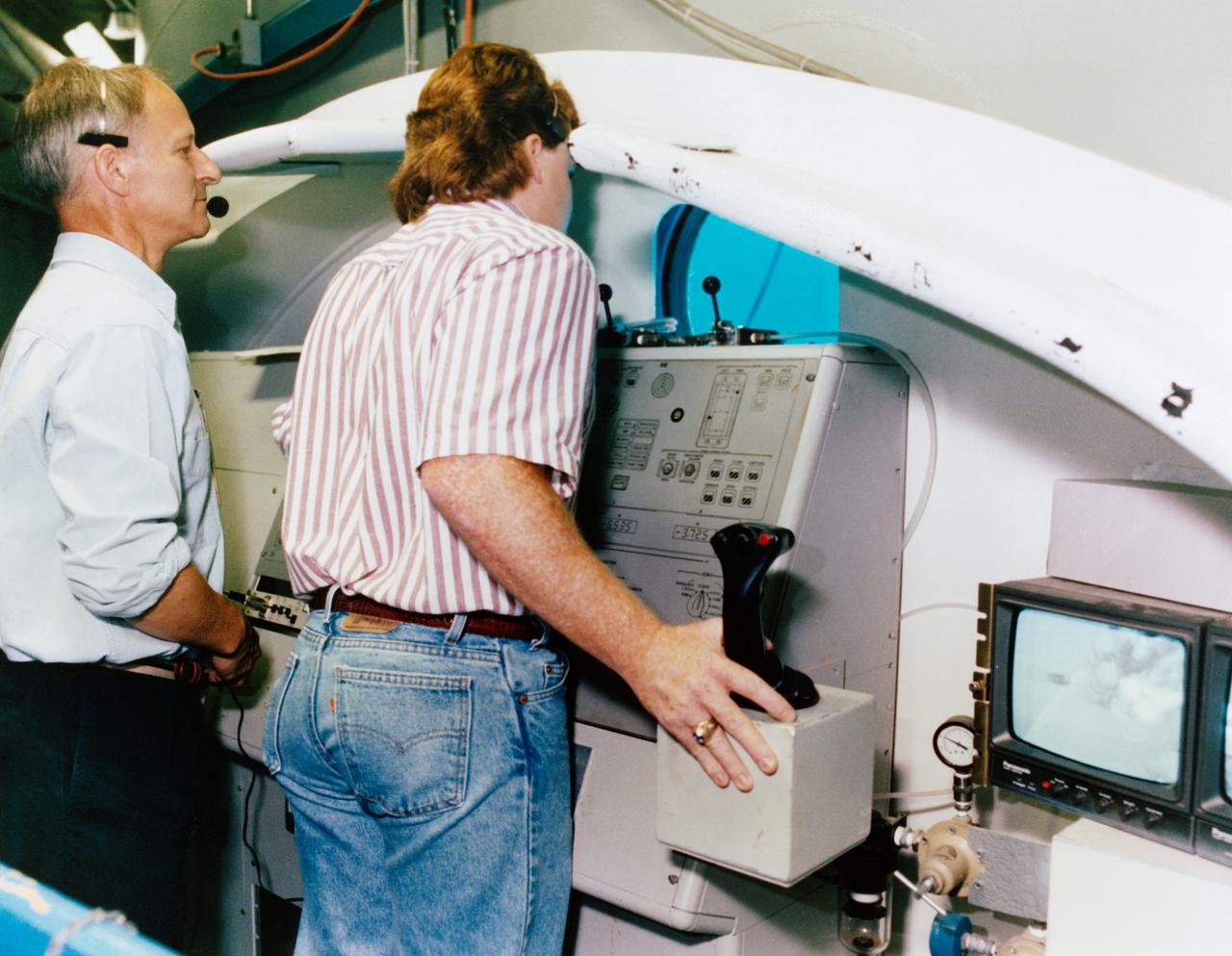
NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle)

NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle) with Dr. Carol Stoker

NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle)
NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle) cameras

NASA Mars Underwater Rover Phantom 2 TROV (Telepresences Controlled Remotely Operated Vehicle) with Dr. Carol Stoker and Owen Gwynne
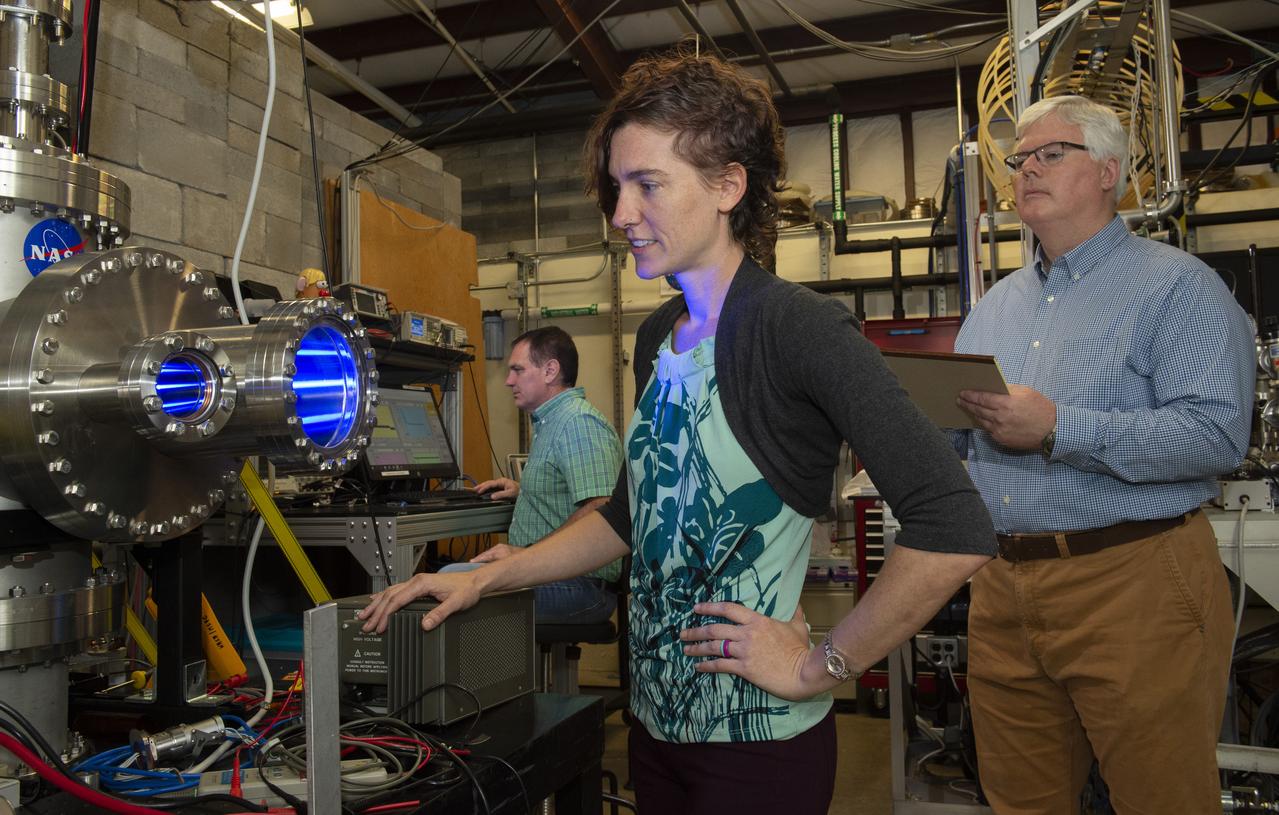
International Space Station (ISS) Remote Power Control Module (RPCM) Hot-mate/De-mate Assessment Dr. Erin Hayward , Mr. Todd Schneider, Mr. Jason Vaughn

ISS011-E-13361 (20 September 2005) --- Astronaut John L. Phillips, Expedition 11 NASA science officer and flight engineer, performs a Remote Power Control Module (RPCM) remove and replacement in the Unity node of the international space station.
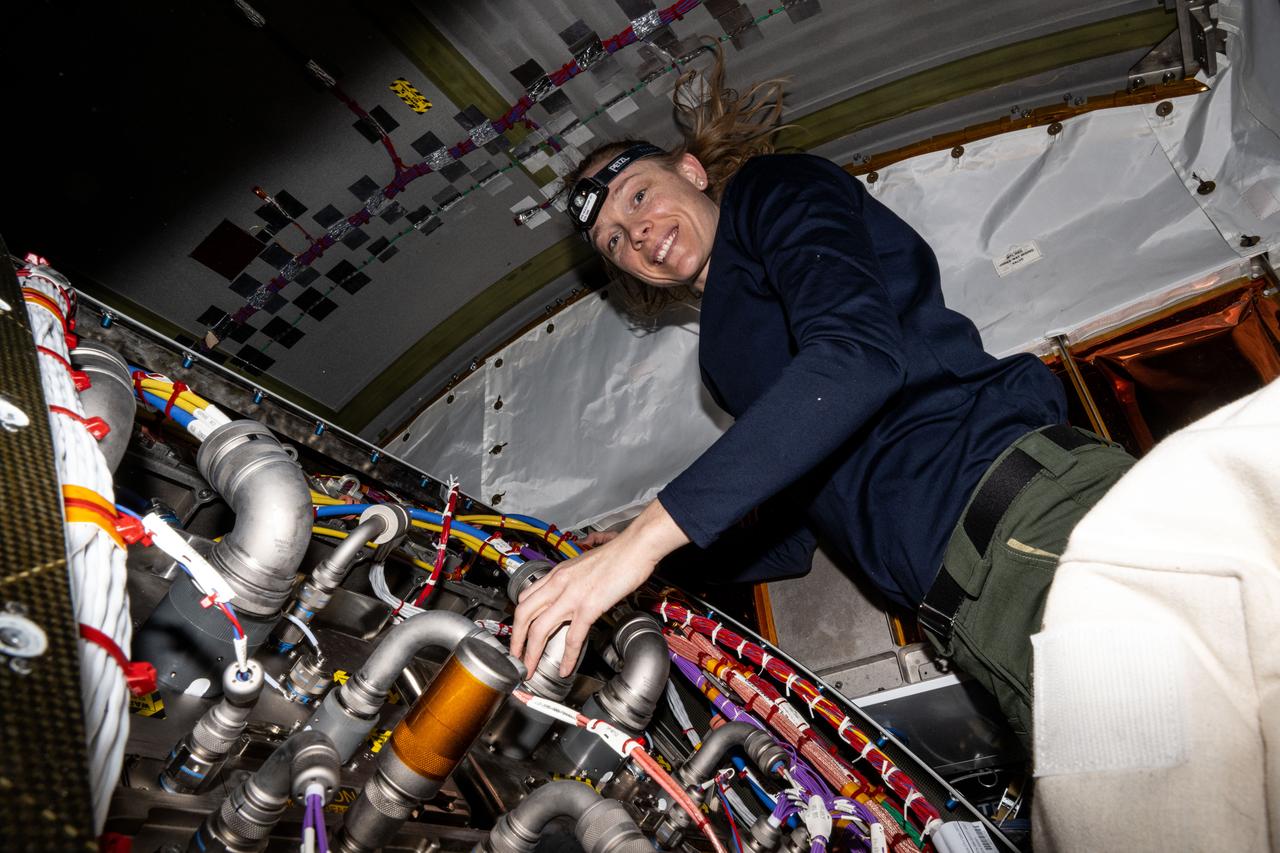
iss073e0379873 (July 21, 2025) --- NASA astronaut and Expedition 73 Flight Engineer Nichole Ayers works inside the International Space Station's Tranquility module swapping out a remote power controller module and inspecting components on the Avionics Rack.

A NASA remote-controlled model motorized sailplane lies over Rogers Dry Lake to test the theory that catching heat thermals extends flight time for small UAVs.

STS064-05-028 (9-20 Sept. 1994) --- On the space shuttle Discovery's aft flight deck, astronaut Susan J. Helms handles controls for the Remote Manipulator System (RMS). The robot arm operated by Helms, who remained inside the cabin, was used to support several tasks performed by the crew during the almost 11-day mission. Those tasks included the release and retrieval of the free-flying Shuttle Pointed Autonomous Research Tool For Astronomy 201 (SPARTAN 201), a six-hour spacewalk and the Shuttle Plume Impingement Flight Experiment (SPIFEX). Photo credit: NASA or National Aeronautics and Space Administration

STS040-S-134 (5 June 1991) --- The space shuttle Columbia, with a seven-member crew aboard, soars toward a nine-day mission devoted to life sciences research. Launch was at 9:24:51 a.m. (EDT), June 5, 1991. This 35mm photo was taken by a remote control tracking device mounted 1600 feet from epicenter. Photo credit: NASA

Scaled Composites' Doug Shane examines the screen of his ground control station during tests in New Mexico. Shane used this configuration as the ground control station to remotely pilot the Proteus aircraft during a NASA sponsored series of tests.

Technicians check instrumentation and systems on NASA 808, a PA-30 aircraft, prior to a research flight. The aircraft was used as the testbed in development of control systems for remotely piloted vehicles that were "flown" from the ground. The concept led to highly successful programs such as the HiMAT and the subscale F-15 remotely piloted vehicles. Over the years, NASA 808 has also been used for spin and stall research related to general aviation aircraft and also research to alleviate wake vortices behind large jetliners. This 1980 photograph taken inside a hangar shows technicians measuring moment of inertia.

Justin Hall, left, chief pilot of small unmanned aircraft systems, carries the atmospheric probe at NASA’s Armstrong Flight Research Center in Edwards, California. The probe, which was designed and built at the center, flew after release from a quad rotor remotely piloted aircraft on Oct. 22, 2024, above Rogers Dry Lake, a flight area adjacent to the NASA center. At right, Justin Link, unmanned aircraft systems pilot, checks out the controllers for the two aircraft.

Dryden Flight Research Center's Piper PA-30 Twin Commanche, which helped validate the RPRV concept, descends to a remotely controlled landing on Rogers Dry Lake, unassisted by the onboard pilot. A Piper PA-30 Twin Commanche, known as NASA 808, was used at the NASA Dryden Flight Research Center as a rugged workhorse in a variety of research projects associated with both general aviation and military projects. In the early 1970s, the PA-30, serial number 301498, was used to test a flight technique used to fly Remotely Piloted Research Vehicles (RPRV's). The technique was first tested with the cockpit windows of the light aircraft blacked out while the pilot flew the aircraft utilizing a television monitor which gave him a "pilot's eye" view ahead of the aircraft. Later pilots flew the aircraft from a ground cockpit, a procedure used with all RPRV's. TV and two-way telemetry allow the pilot to be in constant control of the aircraft. The apparatus mounted over the cockpit is a special fish eye lens camera, used to obtain images that are transmitted to the ground based cockpit. This project paved the way for sophisticated, highly successful research programs involving high risk spin, stall, and flight control conditions, such as the HiMAT and the subscale F-15 remotely piloted vehicles. Over the years, NASA 808 has also been used for spin and stall research related to general aviation aircraft and also research to alleviate wake vortices behind large jetliners.

jsc2024e041214 (2/10/2024) --- Dr. Michael Jobst remotely operates a surgical robot aboard the International Space Station using controls at the Virtual Incision offices in Lincoln, Nebraska. Robotic Surgery Tech Demo tests techniques for performing robotic surgery in microgravity using a miniature surgical robot that can be remotely controlled or teleoperated from Earth. Results from this investigation could support the development of robotic systems to perform remote procedures. Miniaturization and the ability to remotely control robots may help to make surgery available anywhere and anytime. Image courtesy of the University of Nebraska-Lincoln.

jsc2024e041213 (2/10/2024) --- Dr. Michael Jobst remotely operates a surgical robot aboard the International Space Station using controls at the Virtual Incision offices in Lincoln, Nebraska. Robotic Surgery Tech Demo tests techniques for performing robotic surgery in microgravity using a miniature surgical robot that can be remotely controlled or teleoperated from Earth. Results from this investigation could support the development of robotic systems to perform remote procedures. Miniaturization and the ability to remotely control robots may help to make surgery available anywhere and anytime. Image courtesy of the University of Nebraska-Lincoln.

Telepresence Virtual Reality (Mars) Underwater, TROV (Telepresence Controlled REmote Vehicle)

jsc2024e041212 (2/10/2024) --- Professor Shane Farritor (left) watches as Dr. Michael Jobst remotely operates a surgical robot aboard the International Space Station using controls at the Virtual Incision offices in Lincoln, Nebraska. Robotic Surgery Tech Demo tests techniques for performing robotic surgery in microgravity using a miniature surgical robot that can be remotely controlled or teleoperated from Earth. Results from this investigation could support the development of robotic systems to perform these procedures. Miniaturization and the ability to remotely control robots may help to make surgery available anywhere and anytime. Image courtesy of the University of Nebraska-Lincoln.

jsc2024e041215 (2/10/2024) --- Dr. Dmitry Oleynikov remotely operates a surgical robot aboard the International Space Station using controls at the Virtual Incision offices in Lincoln, Nebraska. Robotic Surgery Tech Demo tests techniques for performing a simulated surgical procedure in microgravity using a miniature surgical robot that can be remotely controlled or teleoperated from Earth. Results from this investigation could support the development of robotic systems to perform these procedures. Miniaturization and the ability to remotely control robots may help to make surgery available anywhere and anytime. Image courtesy of the University of Nebraska-Lincoln.

jsc2024e041211 (2/10/2024) --- Robotic Surgery Tech Demo tests techniques for performing robotic surgery in microgravity using a miniature surgical robot that can be remotely controlled or teleoperated from Earth. Several monitors at the Virtual Incision offices in Lincoln, Nebraska show views of the International Space Station during remote operations. Near the center, a larger monitor shows inside the box aboard the space station that houses the surgical robot. Results from this investigation could support the development of robotic systems to perform remote procedures. Miniaturization and the ability to remotely control robots may help to make surgery available anywhere and anytime. Image courtesy of the University of Nebraska-Lincoln.

The control room for the remotely piloted X-56A has a feature that most do not – the pilot and co-pilot are in the front of the room, seen at left. The X-56A team has successfully suppressed flutter, which is a potentially destructive oscillation, with a classical and a modern controller. The controllers are essentially mathematical ways of directing the aircraft.
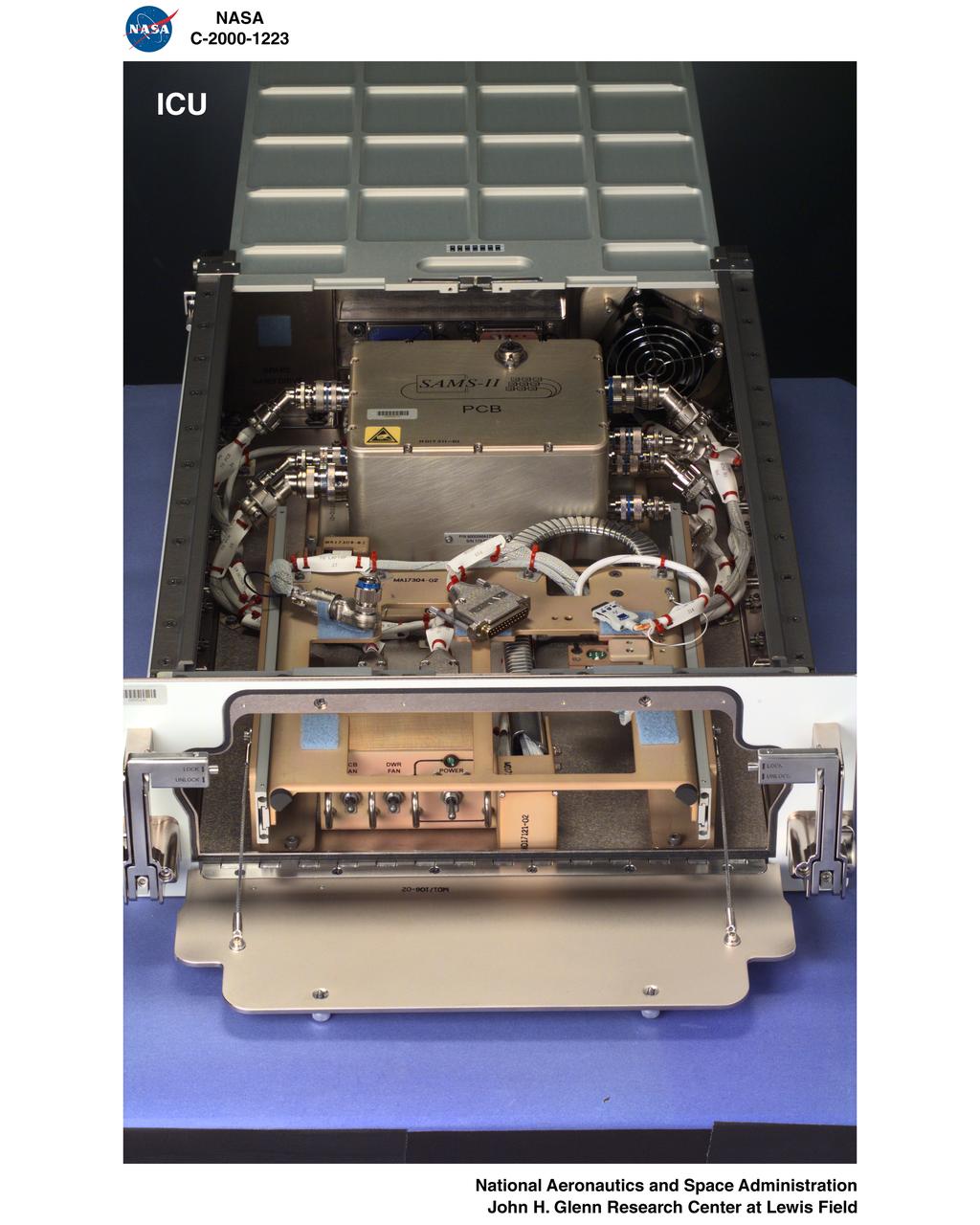
SPACE ACCELERATION MEASUREMENT SYSTEM 2 - SAMS 2 - FLIGHT HARDWARE - ICU - INTERIM CONTROL UNIT - RTS - REMOTE TRIAXIAL SENSOR DRAWERS

A pilot for General Atomics guides the Altair remotely operated aircraft from a ground control station using both visual and telemetered data.

One of NASA's unmanned, remotely controlled aircraft, the Perseus B, is seen here before its first flight at the Dryden Flight Research Center, Edwards, California.

Team members from the College of DuPage in Illinois control their robotic miner in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

VANDENBERG AFB, Calif. – The Launch Control Center LCC inside the Remote Launch Control Center RLCC at Vandenberg Air Force Base in California. The facility is involved with launches of Atlas V and Delta IV rockets. Photo credit: Kim Shiflett
Swiss scientits Claude Nicollier (left), STS-61 mission specialist, waits his turn at the controls for the remote manipulator system (RMS) during a training session in the Neutral Buoyancy Simulator at Marshall Space Flight Center (MSFC). Mark Norman of MSFC has control of the RMS in this frame.

Lockheed XFV-1 model. Project engineer Mark Kelly (not shown). Remote controlled model flown in the settling chamber of the 40x80 wind tunnel. Electric motors in the model, controlled the counter-rotating propellers to test vertical takeoff. Test no. 71

VANDENBERG AFB, Calif. – The Launch Control Center LCC inside the Remote Launch Control Center RLCC at Vandenberg Air Force Base in California. The facility is involved with launches of Atlas V and Delta IV rockets. Photo credit: Kim Shiflett

VANDENBERG AFB, Calif. – The Launch Control Center LCC inside the Remote Launch Control Center RLCC at Vandenberg Air Force Base in California. The facility is involved with launches of Atlas V and Delta IV rockets. Photo credit: Kim Shiflett

Wide shot of 40x 80 wind tunnel settling chamber with Lockheed XFV-1 model. Project engineer Mark Kelly (not shown). Remote controlled model flown in the settling chamber of the 40x80 wind tunnel. Electric motors in the model, controlled the counter-rotating propellers to test vertical takeoff. Test no. 71

S128-E-007090 (31 Aug. 2009) --- Astronaut Jose Hernandez, STS-128 mission specialist, uses a communication system on the aft flight deck of Space Shuttle Discovery while docked with the International Space Station.

S128-E-007093 (31 Aug. 2009) --- Astronaut Jose Hernandez, STS-128 mission specialist, works controls on the aft flight deck of Space Shuttle Discovery while docked with the International Space Station.

S128-E-007085 (31 Aug. 2009) --- Astronaut Jose Hernandez, STS-128 mission specialist, uses a communication system on the aft flight deck of Space Shuttle Discovery while docked with the International Space Station.

ISS032-E-014904 (9 Aug. 2012) --- NASA astronaut Joe Acaba, Expedition 32 flight engineer, works the controls of the Japanese Experiment Module Remote Manipulator System (JEMRMS) in the Kibo laboratory of the International Space Station.

NASA astronaut Terry Virts of Expedition 43 on the International Space Station checks the remote control Canadarm2 on Apr.26, 2015. The Canadarm 2 is used to grapple arriving spacecraft and moving them to their docking ports.

ISS040-E-007691 (5 June 2014) --- NASA astronaut Reid Wiseman, Expedition 40 flight engineer, removes and replaces the remote power switch controller module in the Destiny laboratory of the International Space Station.

iss054e022063 (Jan. 13, 2018) ---The SpaceX Dragon is pictured from inside the seven-windowed cupola moments after ground controllers remotely commanded the Canadarm2 to release it from its grips.

K-10 (red) plaentary rover at Marscape (Ames Mars Yard): with prototype flight control team remotely operating K-10 'Red' from Ames Future Flight Centeral (FFC) Simulator, with Hans Utz.

iss051e026136 (April 22, 2017) --- The Cygnus resupply ship from Orbital ATK is remotely guided to its port on the Unity module by ground controllers using the Canadarm2 robotic arm.

STS097-316-002 (30 Nov. - 11 Dec. 2000) Astronaut Marc Garneau, mission specialist representing the Canadian Space Agency (CSA), works the controls for Endeavour's remote manipulator system (RMS).

iss051e020842 (April 22, 2017) --- The Cygnus resupply ship from Orbital ATK is remotely guided to its port on the Unity module by ground controllers using the Canadarm2 robotic arm.

iss063e101638 (Oct. 5, 2020) --- The Northrop Grumman Cygnus space freighter is pictured in the grips of the Canadarm2 robotic arm as mission controllers remotely guide the cargo vehicle to its installation point on the International Space Station's Unity module.

Astronaut Reid Wiseman,Expedition 40 flight engineer,is photographed at the Space Station Remote Manipulator System (SSRMS) arm controls in the U.S. Laboratory during the capture and berthing of the Cygnus spacecraft.

K-10 (red) plaentary rover at Marscape (Ames Mars Yard): with prototype flight control team remotely operating K-10 'Red' from Ames Future Flight Centeral (FFC) Simulator, with Estrellina Pacis.

ISS014-E-13980 (19 Feb. 2007) --- Astronaut Sunita L. Williams, Expedition 14 flight engineer, works the controls of the Space Station Remote Manipulator System (SSRMS) or Canadarm2 in the Destiny laboratory of the International Space Station.
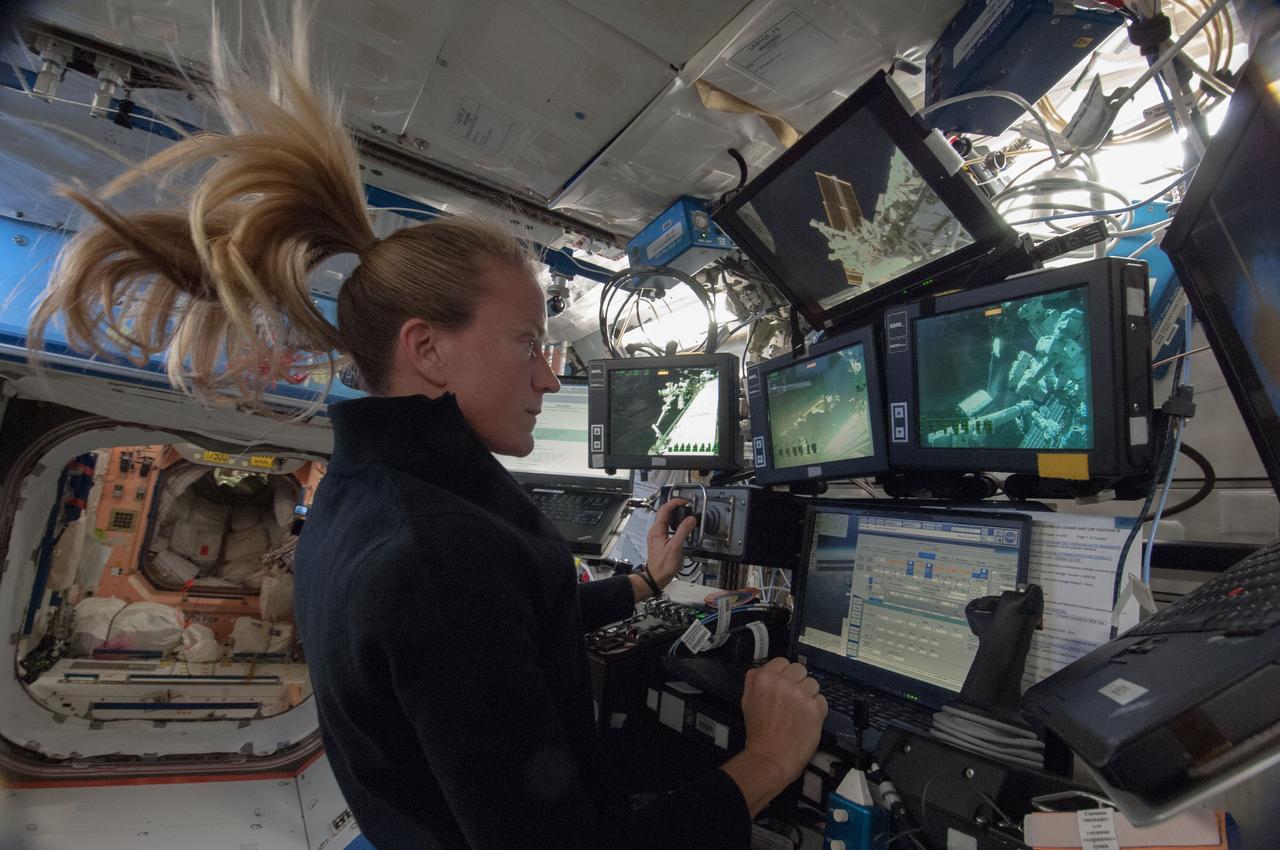
Astronaut Karen Nyberg,Expedition 36 flight engineer,is photographed at the Space Station Remote Manipulator System (SSRMS) controls in the U.S. Laboratory during a session of extravehicular activity (EVA).

K-10 (red) plaentary rover at Marscape (Ames Mars Yard): with prototype flight control team remotely operating K-10 'Red' from Ames Future Flight Centeral (FFC) Simulator. With Rob Landis

ISS011-E-11312 (29 July 2005) --- Astronaut James M. Kelly, STS-114 pilot, controls the Space Station Remote Manipulator System (Canadarm2) from the U.S. Lab, Destiny, on the International Space Station.

ISS032-E-014902 (9 Aug. 2012) --- NASA astronaut Joe Acaba, Expedition 32 flight engineer, works the controls of the Japanese Experiment Module Remote Manipulator System (JEMRMS) in the Kibo laboratory of the International Space Station.

KENNEDY SPACE CENTER, FLA. - Florida Gov. Jeb Bush (right) kicks off the 2005 FIRST Robotics Regional Competition held at the University of Central Florida March 10-12. NASA and the University are co-hosts of the regional event. The competition stages short games played by remote-controlled robots, which are designed and built in six weeks by a team of high school students and a handful of engineers-mentors. The students control the robots on the playing field. NASA and the University of Central Florida are co-sponsors of the regional event. The competition stages short games played by remote-controlled robots, which are designed and built in six weeks by a team of high school students and a handful of engineers-mentors. The students control the robots on the playing field.

Students from the New York University Tandon School of Engineering prepare their robot for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Team members from the University of North Florida watch their robotic miner dig in the mining arena NASA’s LUNABOTICS competition on May 27, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams used their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with lunar simulant and rocks. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
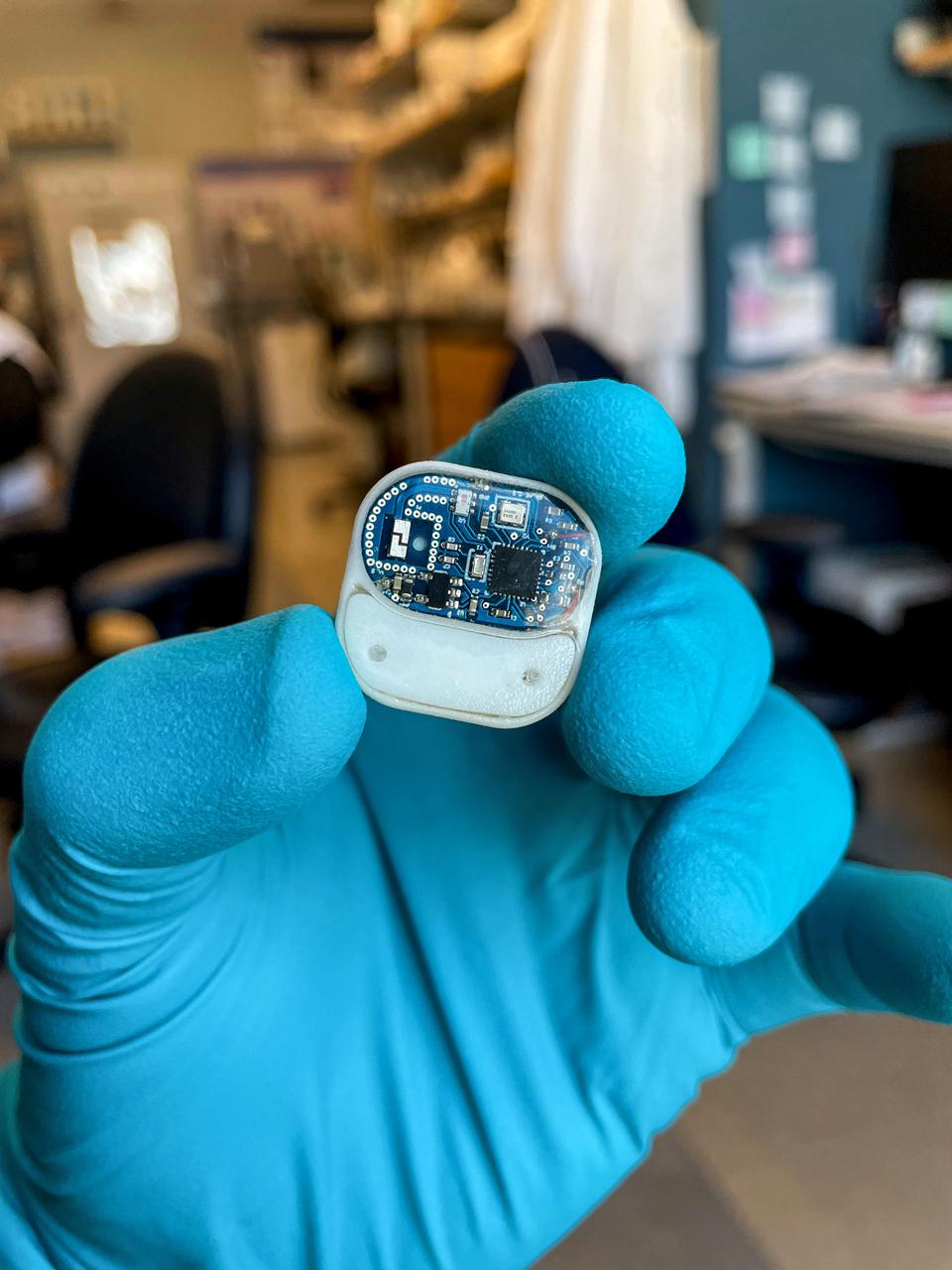
jsc2021e037283 (8/11/2021) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute

New Mexico Tech students prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
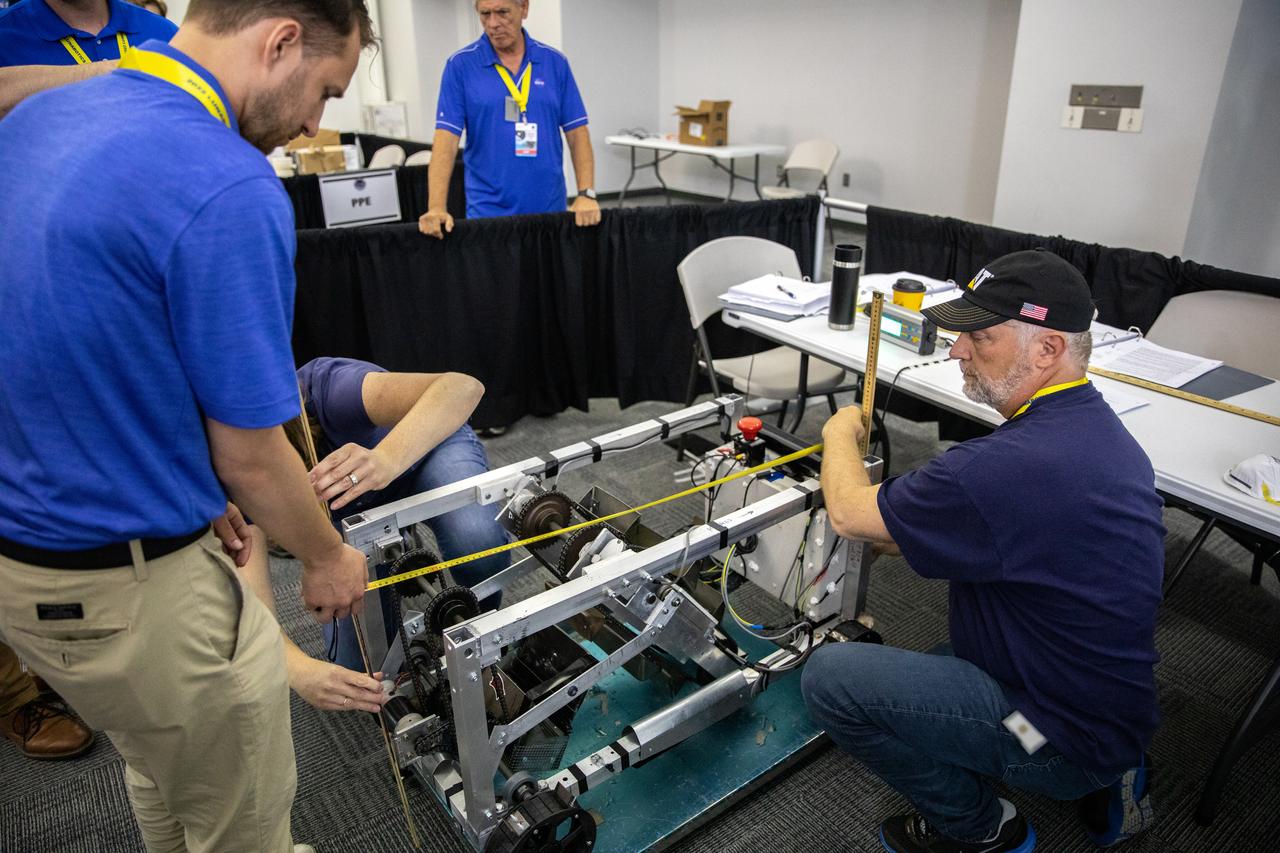
The Saginaw Valley State University team’s robotic miner is being measured and weighed to qualify for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

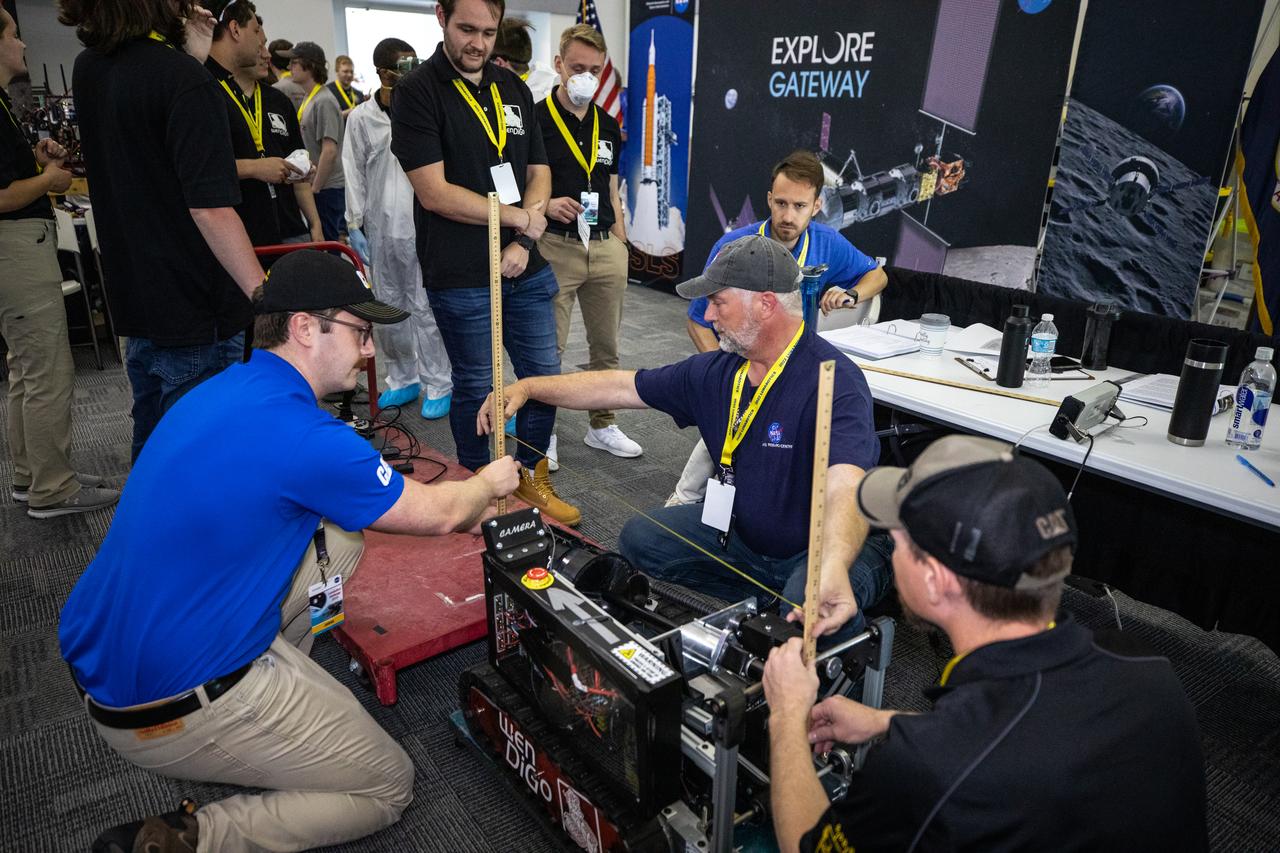
The University of New Hampshire’s robotic miner is placed on a cart to record its measurements and weight before the school’s team prepares it for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 27, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with lunar simulant and rocks. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from the University of North Carolina at Charlotte prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

A team member from the University of Maine prepares their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from the University of Rochester prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

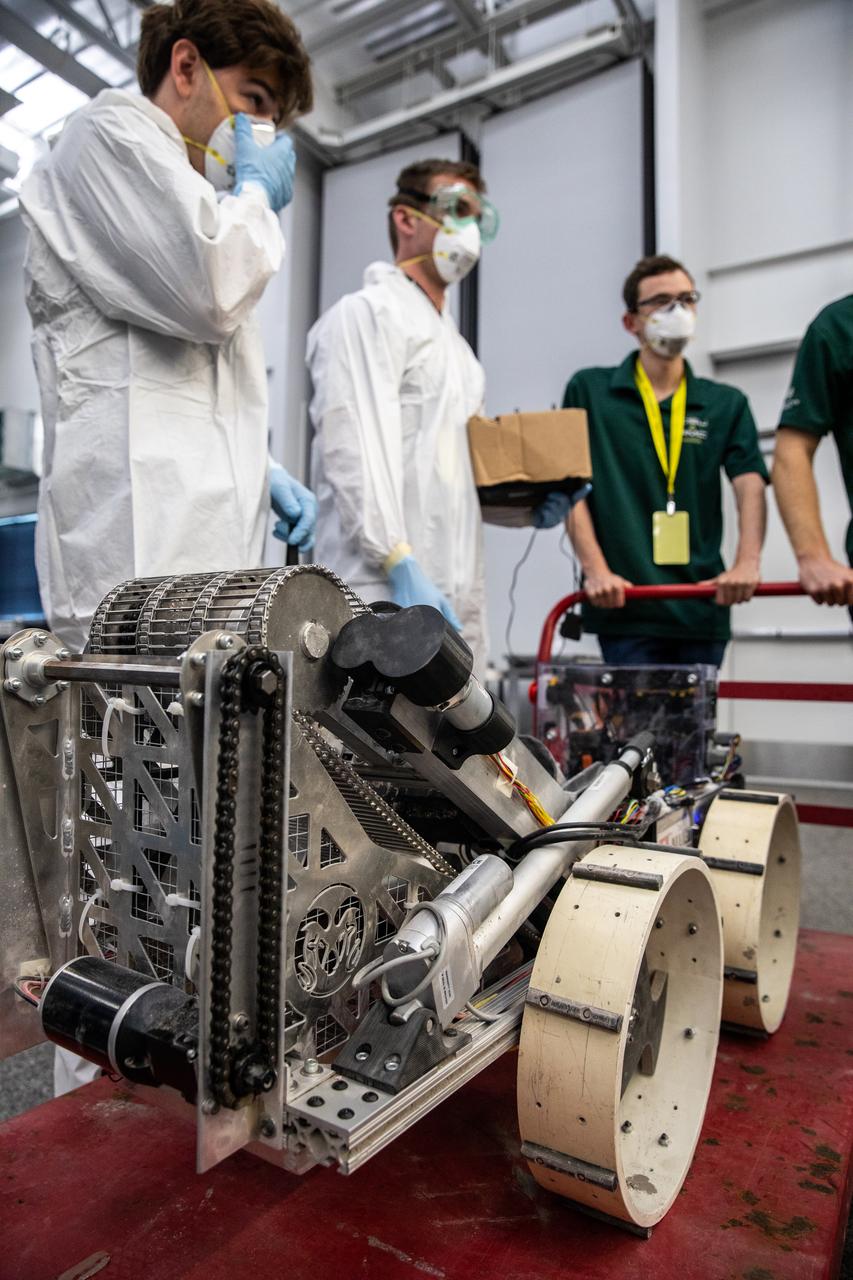
Students from the United States Military Academy (West Point), dressed in safety gear, prepare to enter the mining arena with their robotic miner during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
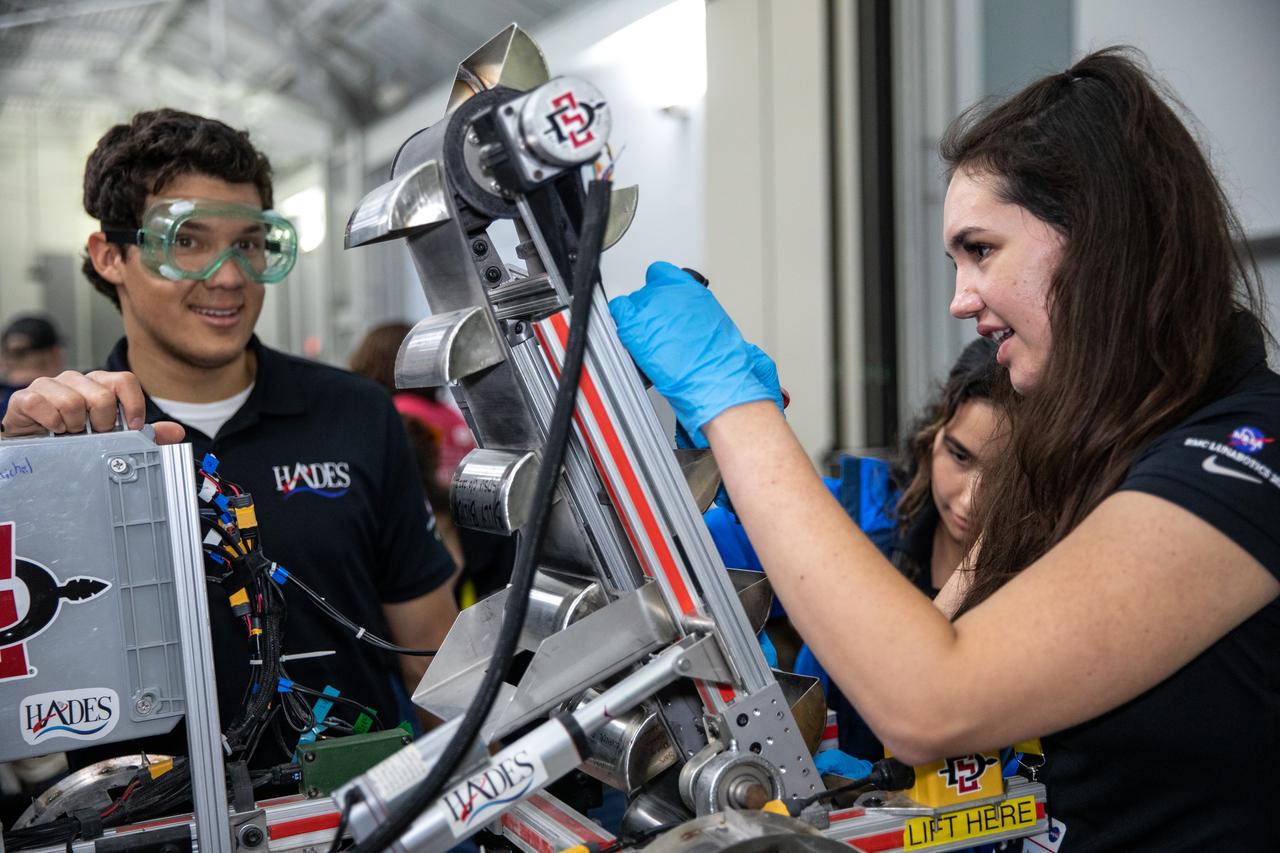
Students from San Diego State College prepare their robotic miner for its second turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 27, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams used their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with lunar simulant and rocks. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from Iowa State University College students prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
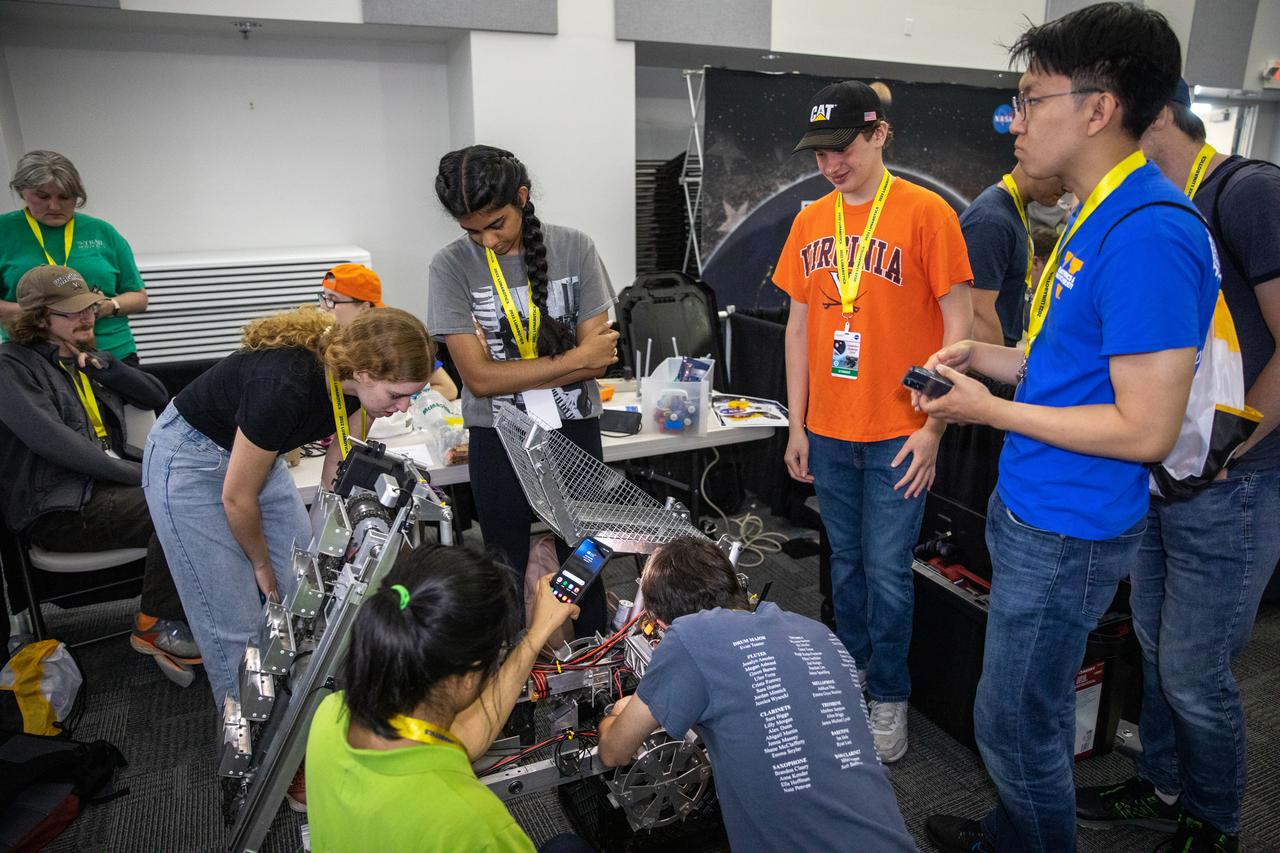
Students from the University of Virginia prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from the University of Arkansas prepare their robot for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
Students from the University of Nebraska-Lincoln prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
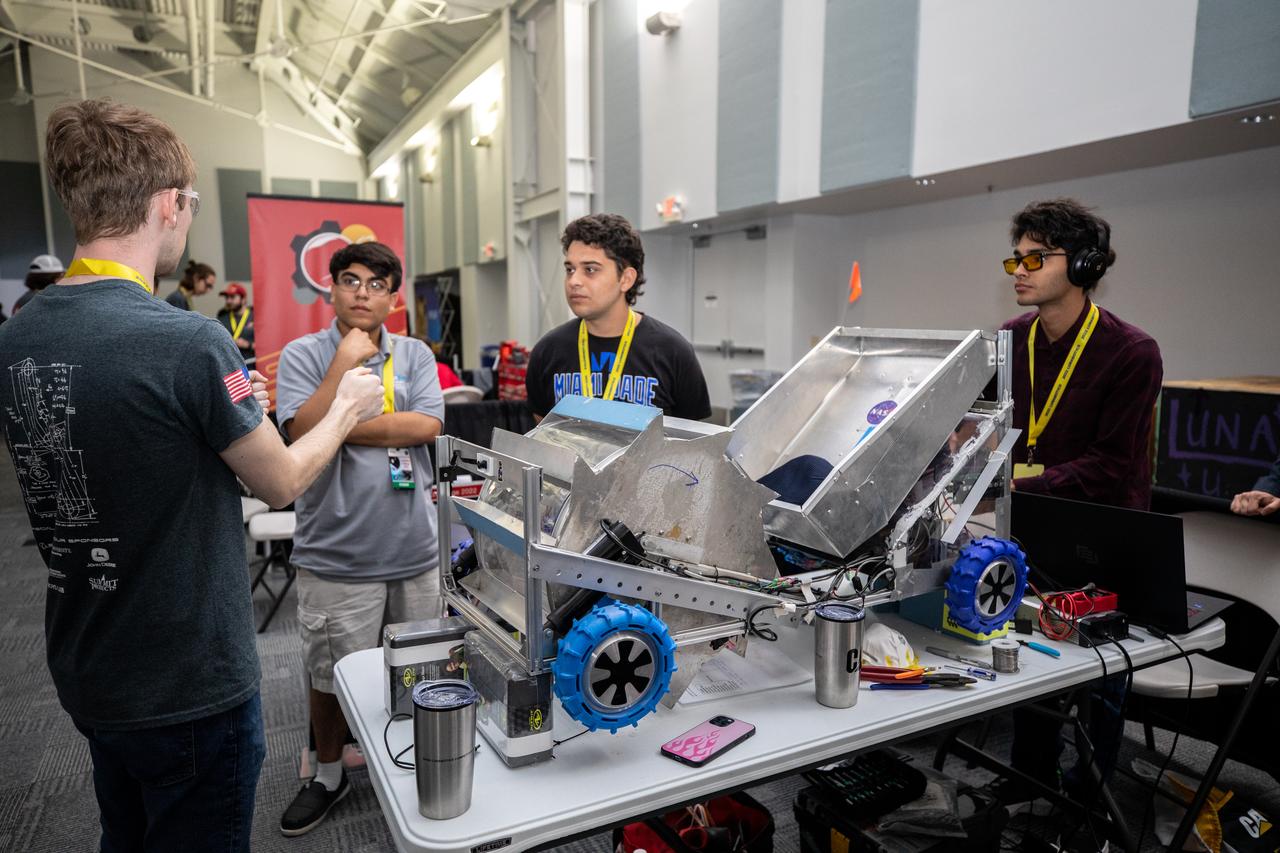
Students from Miami-Dade College at Kendall prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
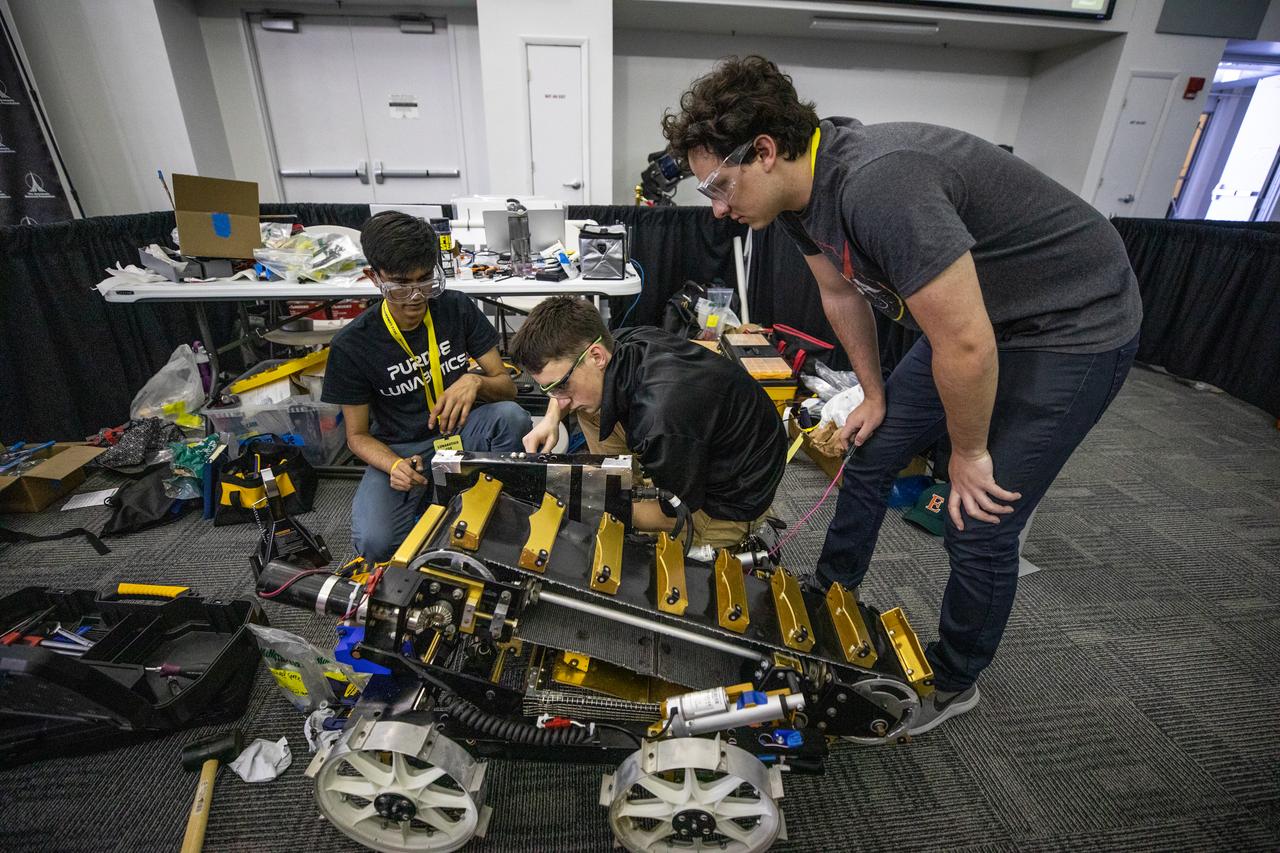
Students from Purdue University prepare their robotic miner for its turn to dig in the mining pit during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

jsc2021e037284 (4/9/2020) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute

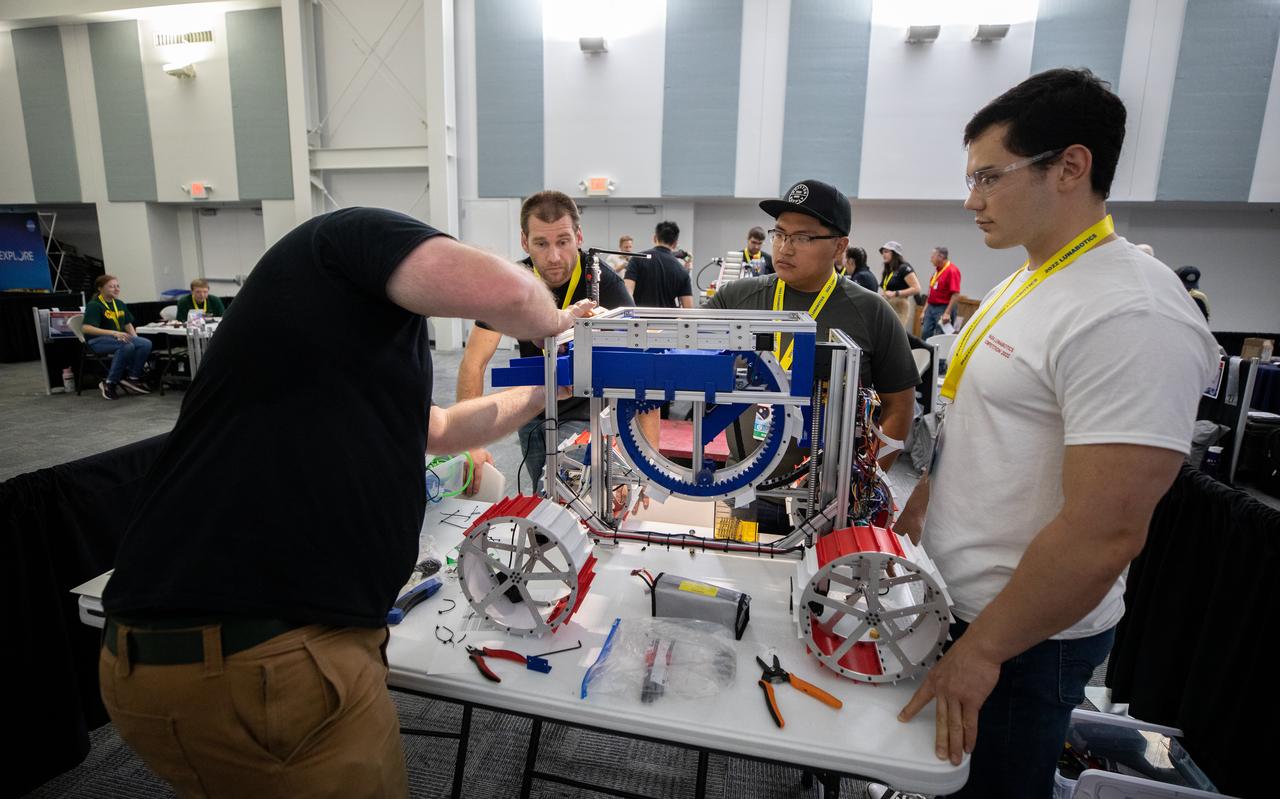
College teams prepare their robotic miners for their turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
Students from Colorado State University prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from the University of Illinois at Chicago prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
Students from the University of North Dakota prepare their robot miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from the South Dakota School of Mines and Technology prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Team members from the South Dakota School of Mines and Technology prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
Students with Florida Technological University prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 23, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
A robotic miner from Marquette University in Milwaukee, Wisconsin, prepares to dig in the mining arena during NASA’s LUNABOTICS competition on May 27, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 college and university teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with lunar simulant and rocks. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

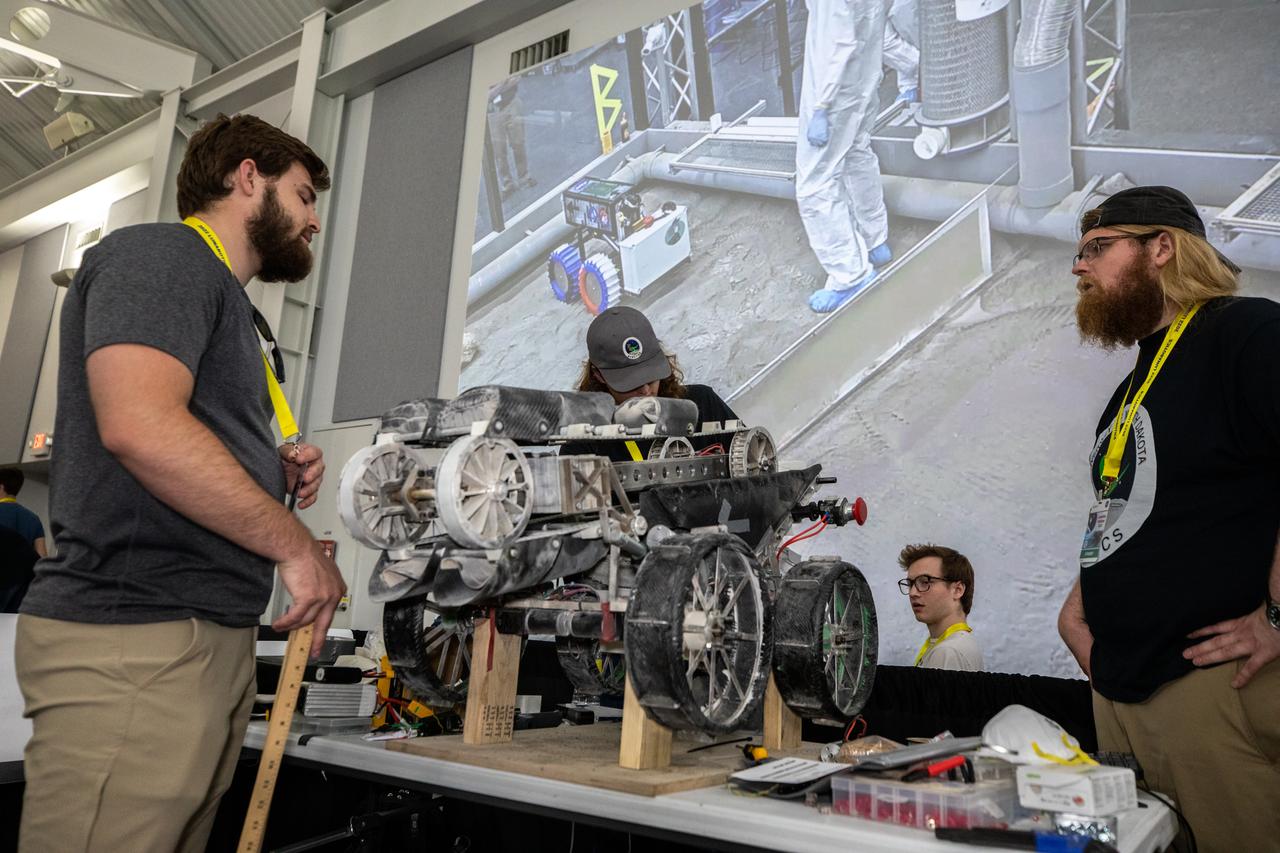
Team members from various colleges and universities watch a jumbo screen as robotic miners dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
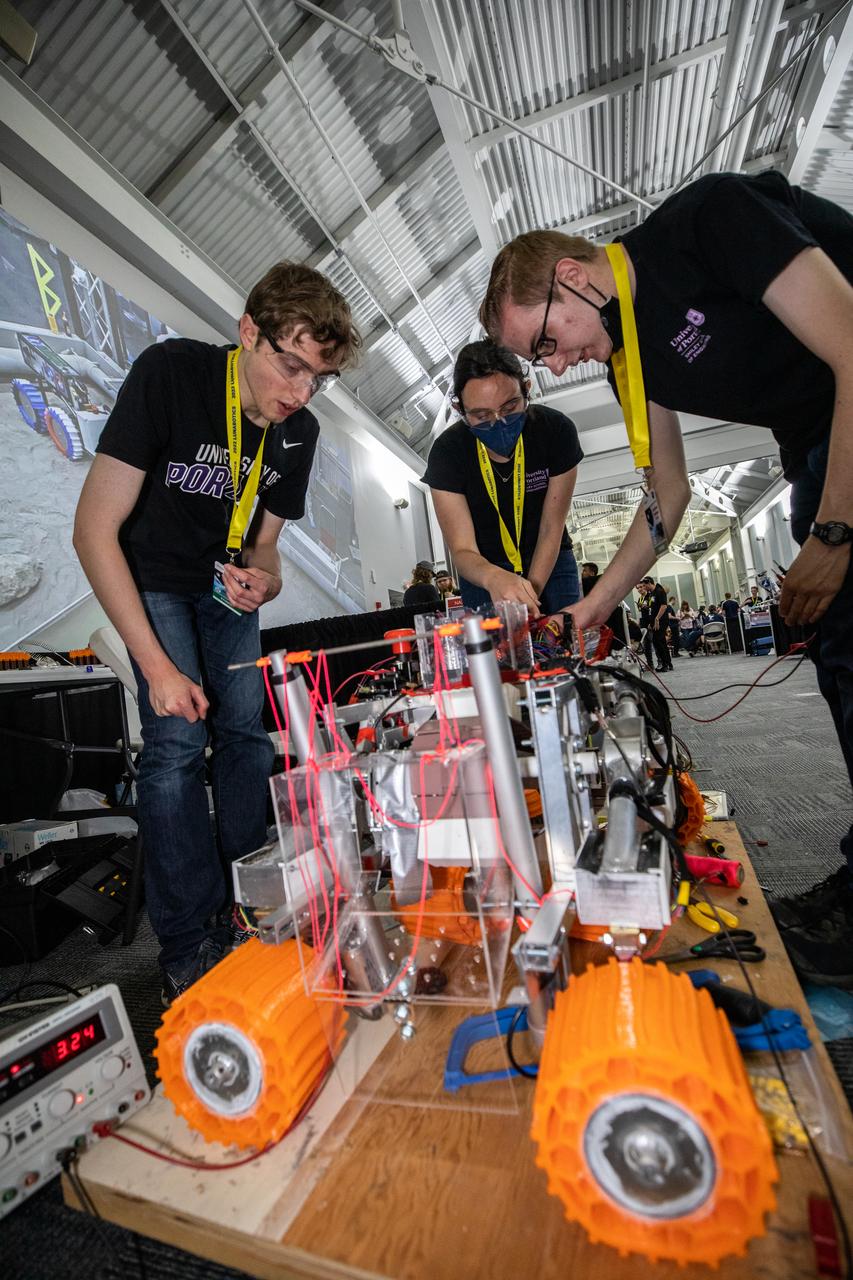
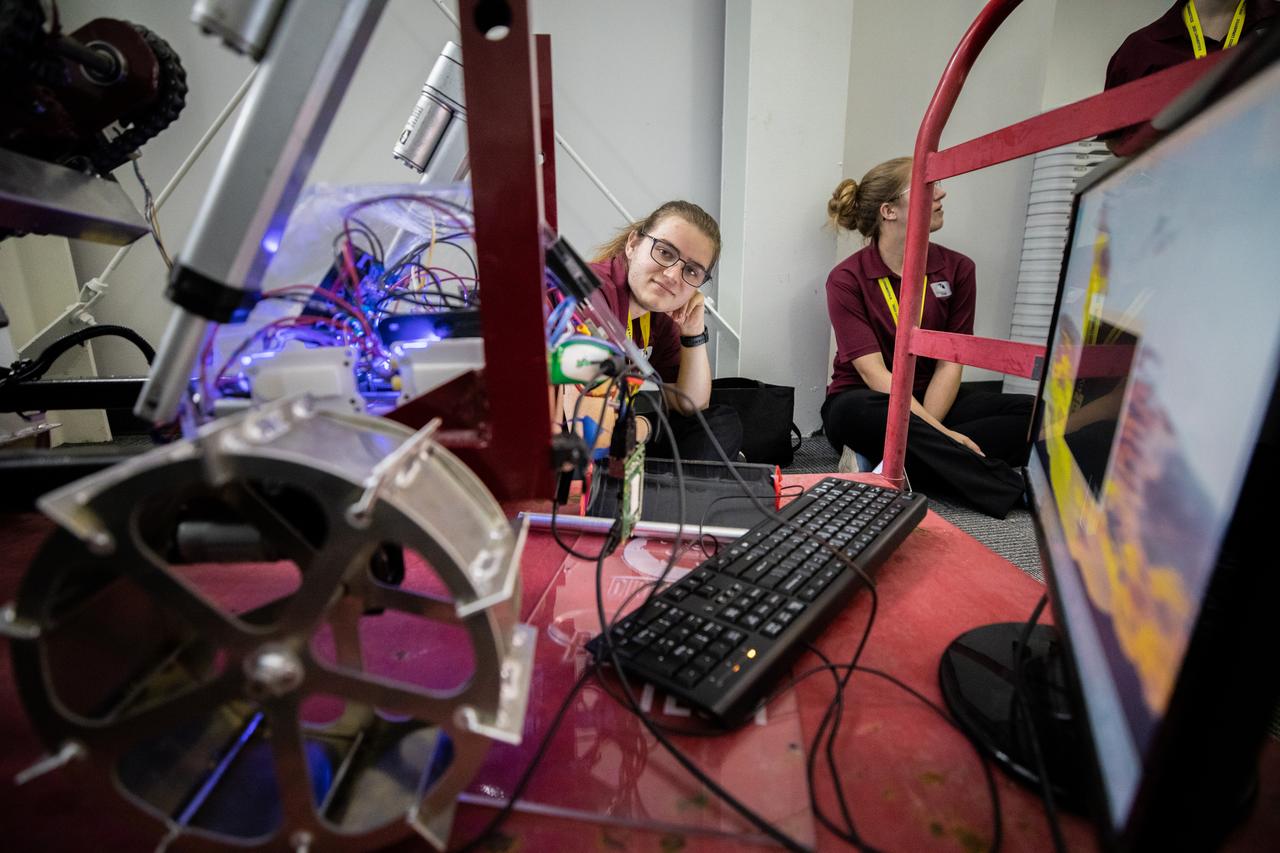
Students from the University of Portland in Oregon prepare their robot miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

Students from California State University, Long Beach, prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
Team members from Sonoma State University in California prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 26, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their semi-autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

The Milwaukee School of Engineering’s robotic miner is ready for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.
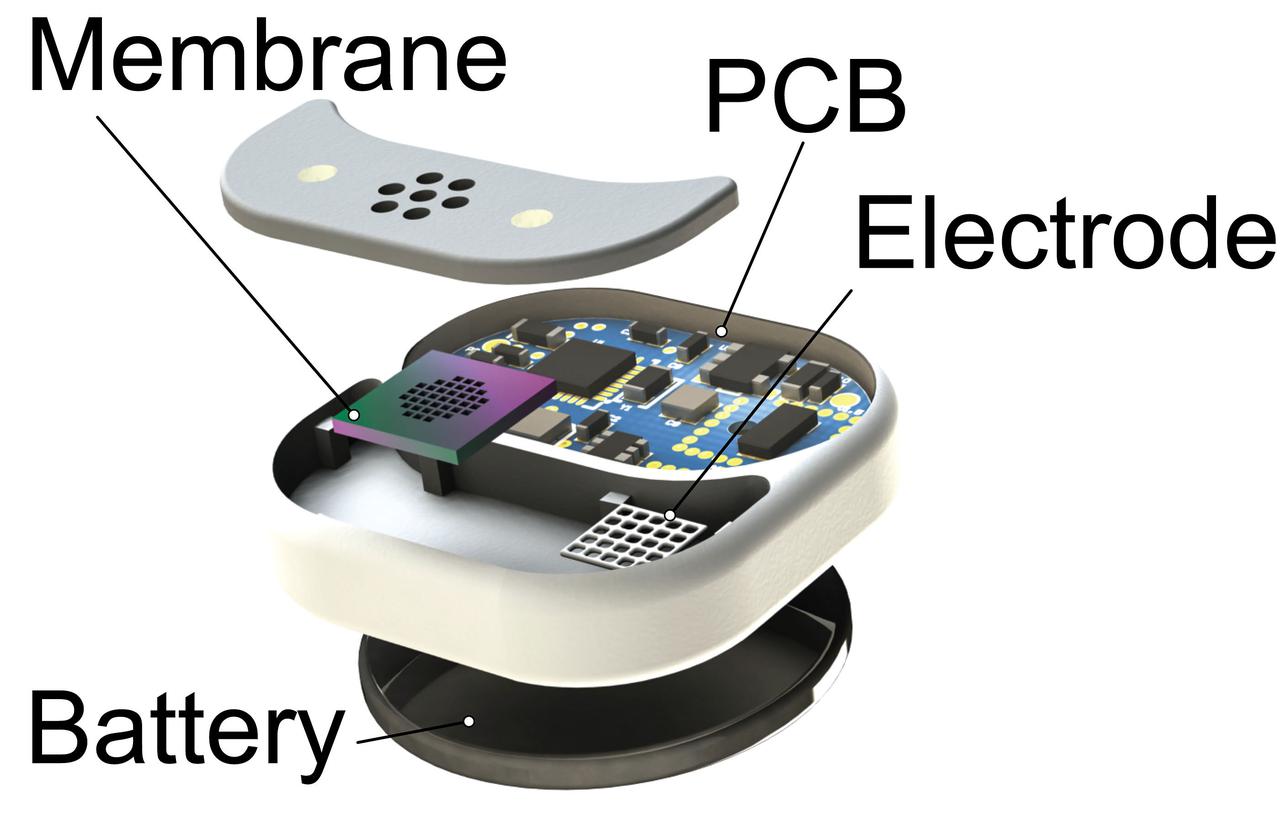
sc2021e037282 (8/20/2021) --- Nanofluidic Implant Communication Experiment (NICE) (Faraday-NICE) aims to develop an implantable drug delivery system that allows for remote control and modulation of the release of therapeutics over weeks to months. In this investigation, fully assembled implantable devices are tested for remote communication capabilities from Earth to the International Space Station (ISS). This investigation aims to verify that 100% of the communications between controller and implant is achieved and maintained on station. Implants are immersed in saline solution, a surrogate of physiological conditions, then placed and sealed in 15 ml containers. The tubes are mounted within the ProxOpS Faraday experimental box. Image Credit: Houston Methodist Research Institute
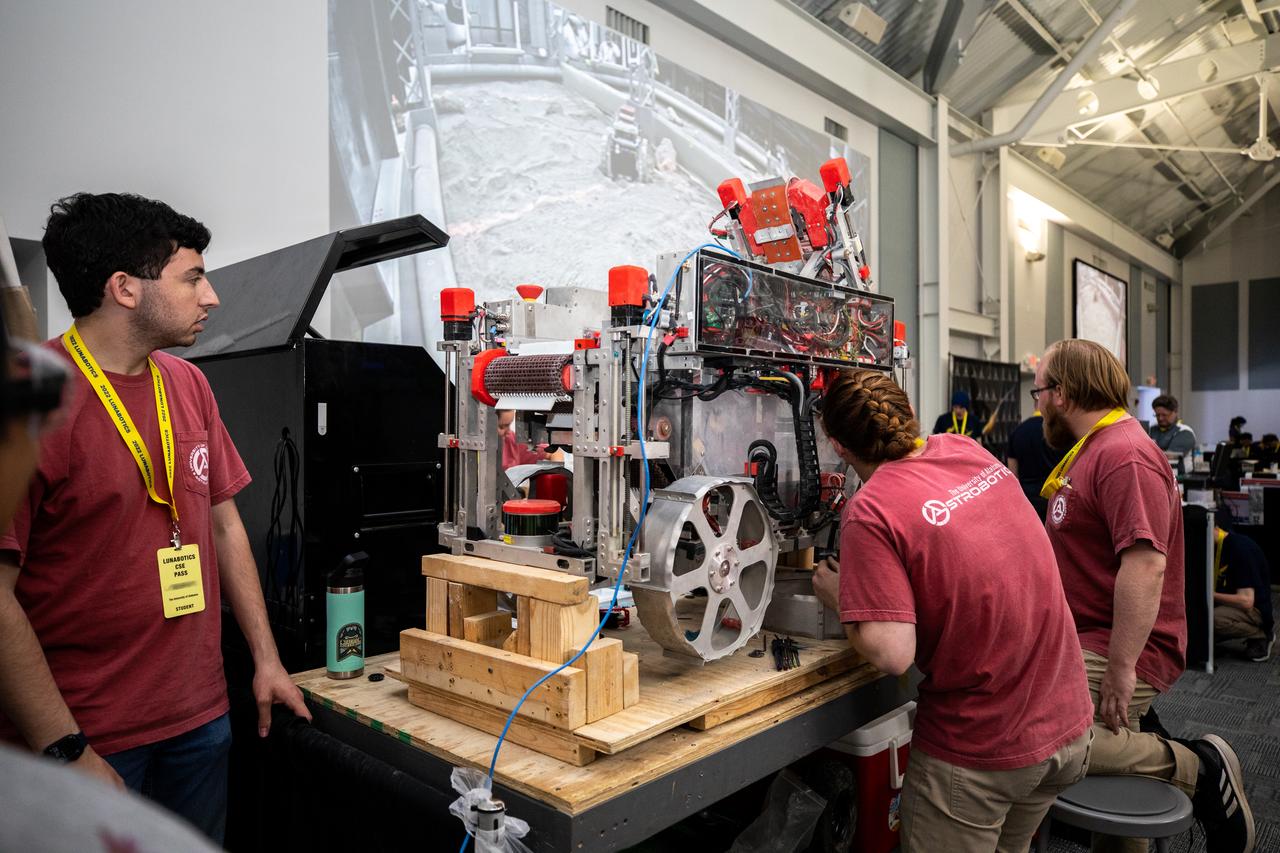
Students from the University of Alabama prepare their robotic miner for its turn to dig in the mining arena during NASA’s LUNABOTICS competition on May 24, 2022, at the Center for Space Education near the Kennedy Space Center Visitor Complex in Florida. More than 35 teams from around the U.S. have designed and built remote-controlled robots for the mining competition. Teams use their autonomous or remote-controlled robots to maneuver and dig in a supersized sandbox filled with rocks and simulated lunar soil, or regolith. The objective of the challenge is to see which team’s robot can collect and deposit the most rocky regolith within a specified amount of time.

S127-E-006954 (19 July 2009) --- Astronaut Christopher Cassidy, STS-127 mission specialist, is pictured on the mid deck of the Space Shuttle Endeavour on a day between two days during which he is assigned support duty for space-walking crewmates. Meanwhile "upstairs" on the flight deck, crewmates are using remote controls and the Canadian-built remote manipulator system (RMS) arm to move the Integrated Cargo Carrier from Endeavour's payload bay.
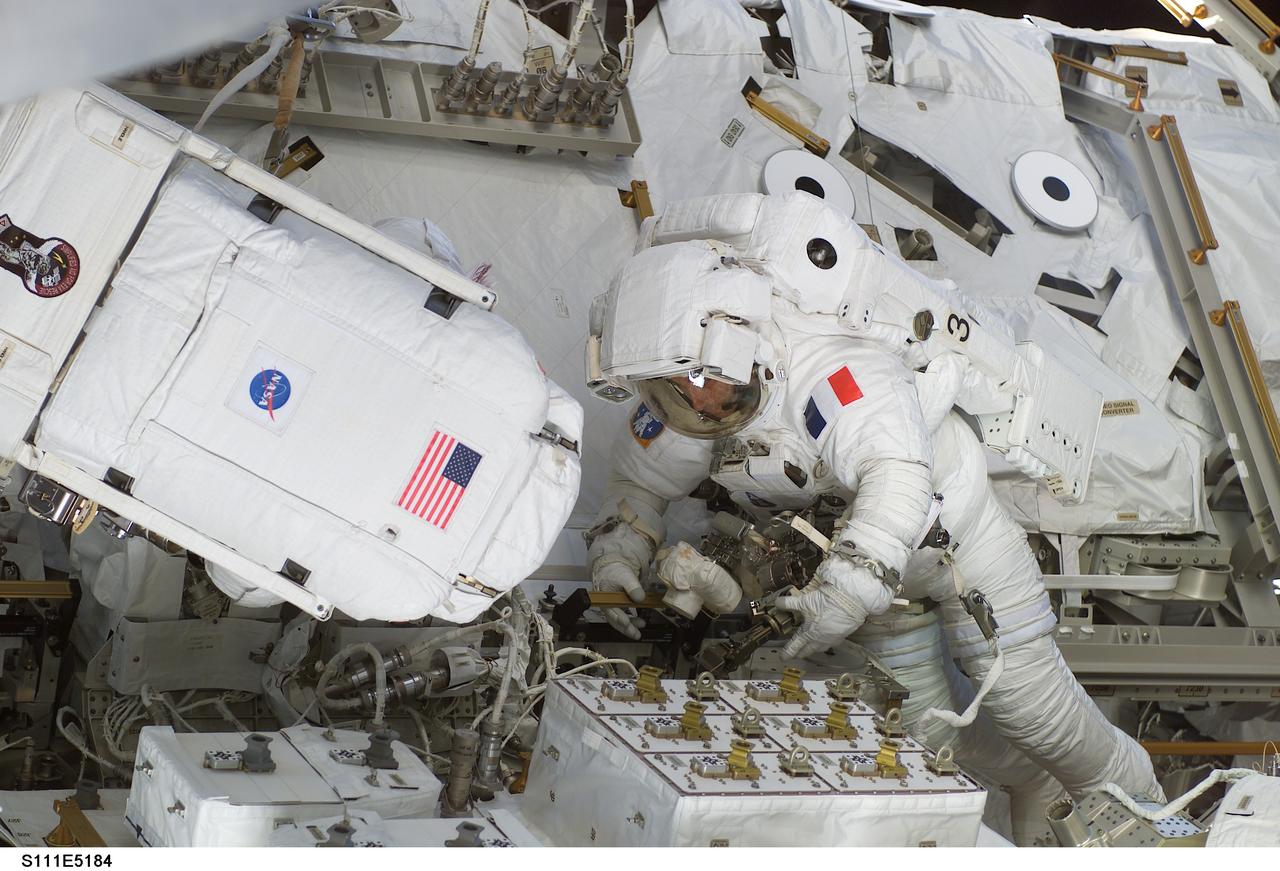
STS111-E-5184 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.

STS111-E-5183 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.

ISS034-E-027317 (10 Jan. 2013) --- In the Cupola aboard the Earth-orbiting International Space Station, Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works the controls at the Robotic workstation to maneuver the Space Station Remote Manipulator System (SSRMS) or CanadArm2 from its parked position to grapple the Mobile Remote Servicer (MRS) Base System (MBS) Power and Data Grapple Fixture 4 (PDGF-4).
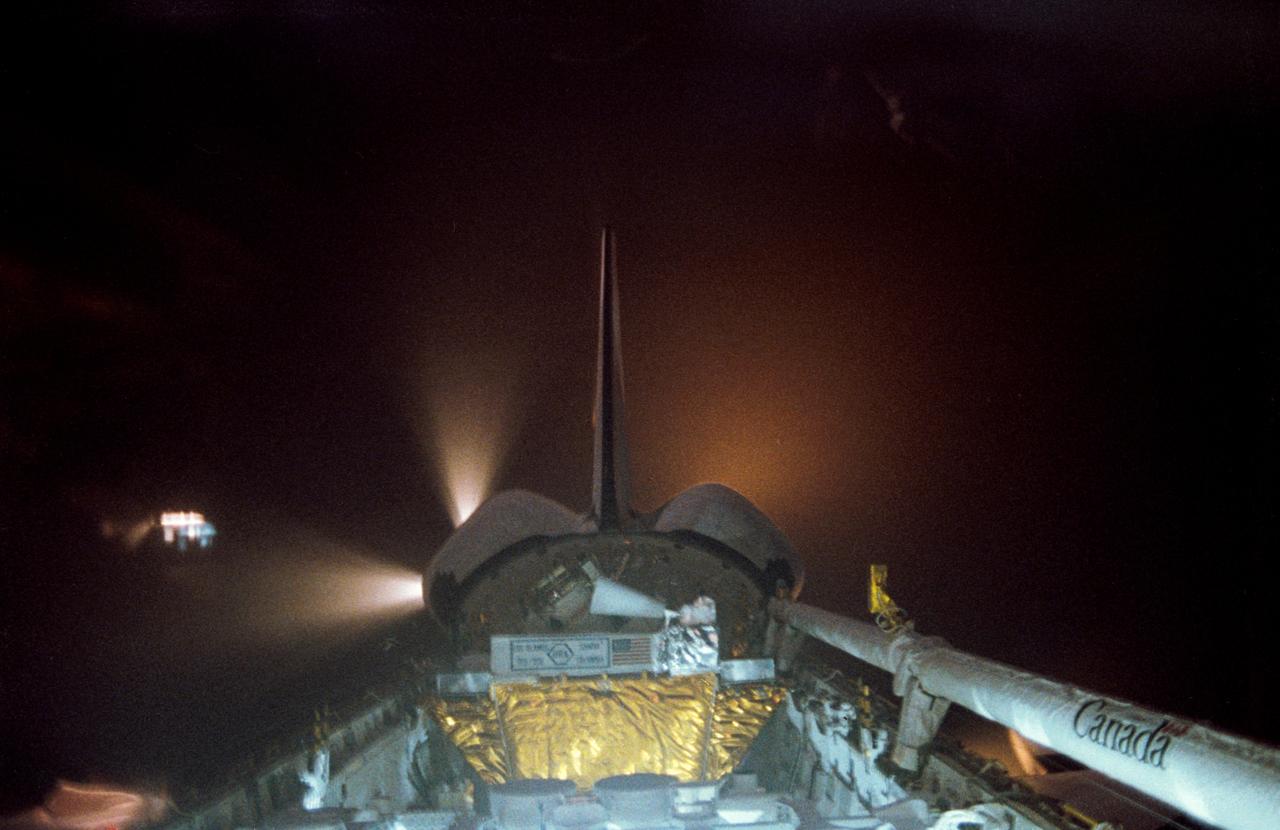
STS039-27-016 (28 April-6 May 1991) --- The Space Shuttle Discovery fires reaction control subsystem (RCS) thrusters in this 35mm frame, taken from inside the crew cabin. Seen in Discovery's payload bay are the tops of cannisters on the STP-1 payload, configured on the STS 39 Hitchhiker carrier; and the Air Force Program (AFP) 675 package. AFP-675 consists of the Cryogenic Infrared Radiance Instrumentation for Shuttle (CIRRIS)-1A; Far Ultraviolet Camera (FAR-UV) Experiment; Horizon Ultraviolet Program (HUP); Quadruple Ion Neutral Mass Spectrometer (QINMS); and the Uniformly Redundant Array (URA).

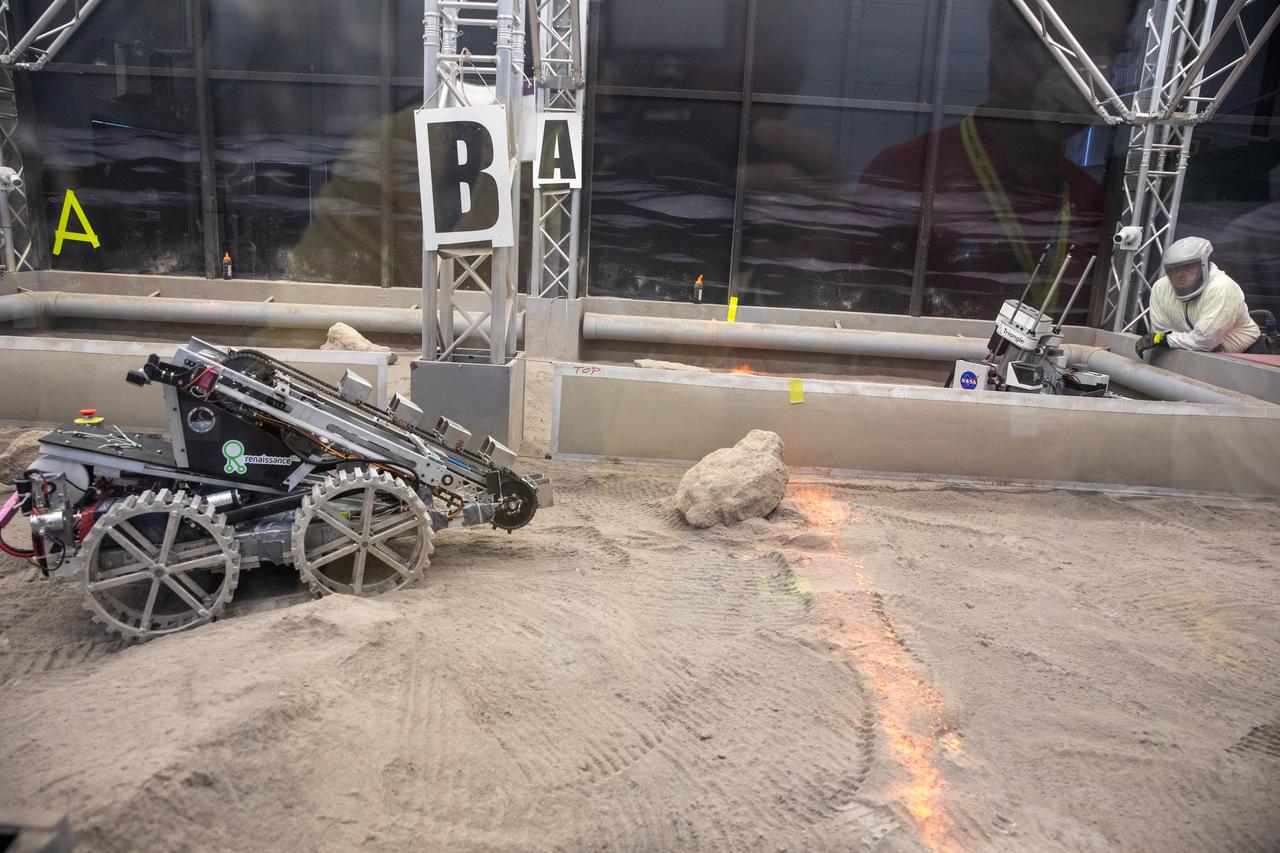
CAPE CANAVERAL, Fla. -- A remote controlled or autonomous excavator, called a lunabot, is on display outside of the "Lunarena" at the Kennedy Space Center Visitor Complex in Florida where university students maneuver their remote controlled lunabots, in a "sand box" of ultra-fine simulated lunar soil during NASA's second annual Lunabotics Mining Competition. Thirty-six teams of undergraduate and graduate students from the United States, Bangladesh, Canada, Colombia and India will participate in NASA's Lunabotics Mining Competition May 26 - 28 at the agency's Kennedy Space Center in Florida. The competition is designed to engage and retain students in science, technology, engineering and mathematics (STEM). Teams will maneuver their remote controlled or autonomous excavators, called lunabots, in about 60 tons of ultra-fine simulated lunar soil, called BP-1. The competition is an Exploration Systems Mission Directorate project managed by Kennedy's Education Division. The event also provides a competitive environment that could result in innovative ideas and solutions for NASA's future excavation of the moon. Photo credit: NASA/Jack Pfaller

S130-E-007486 (11 Feb. 2010) --- In the grasp of the station’s Canadarm2, the Tranquility module is transferred from its stowage position in space shuttle Endeavour’s (STS-130) payload bay to position it on the port side of the Unity node of the International Space Station. Tranquility was locked in place with 16 remotely-controlled bolts.
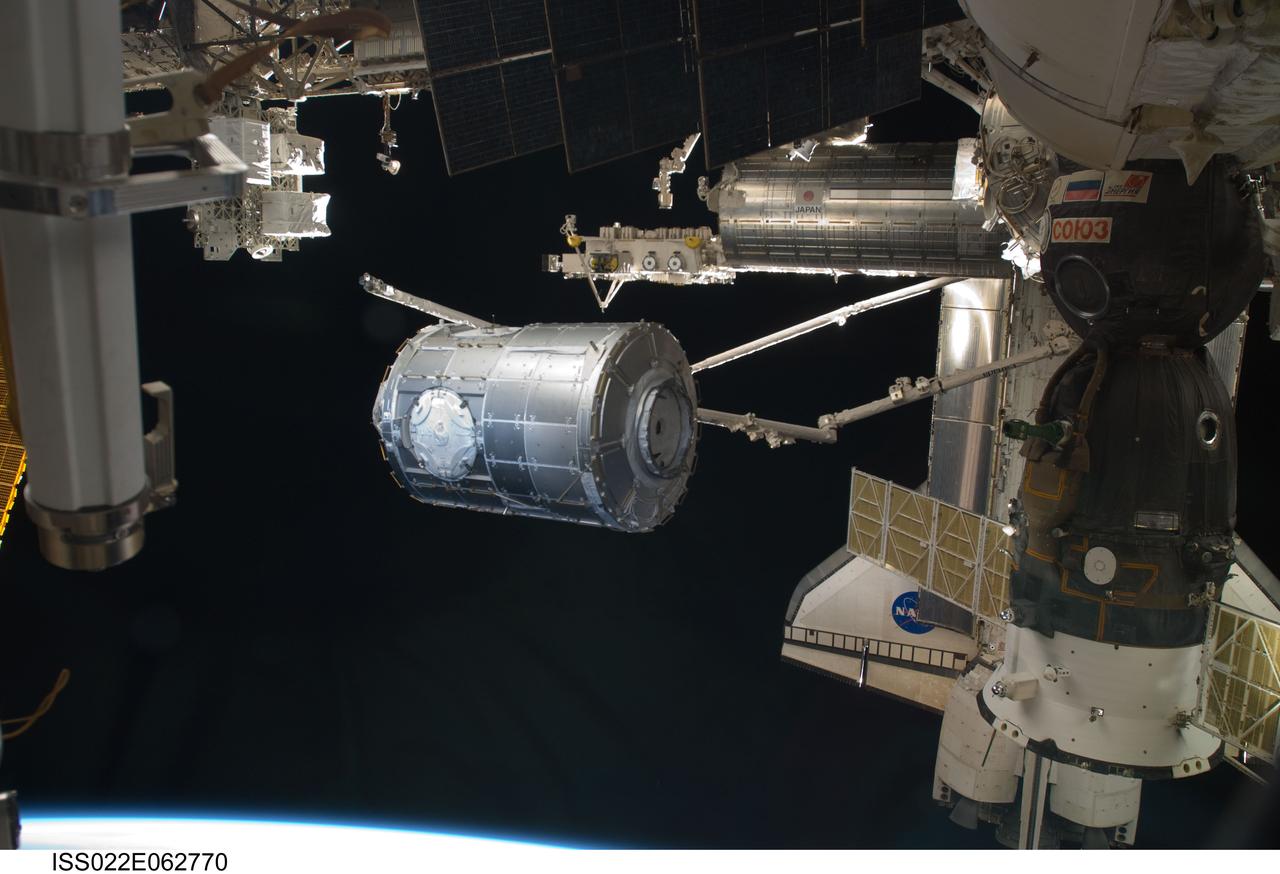
ISS022-E-062770 (11 Feb. 2010) --- In the grasp of the station?s Canadarm2, the Tranquility module is transferred from its stowage position in space shuttle Endeavour?s (STS-130) payload bay to position it on the port side of the Unity node of the International Space Station. Tranquility was locked in place with 16 remotely-controlled bolts.

ISS030-E-272083 (17 April 2012) --- European Space Agency astronaut Andre Kuipers, Expedition 30 flight engineer, works the controls of the Canadarm2 Space Station Remote Manipulator System (SSRMS) in the Cupola of the International Space Station.

ISS038-E-029767 (13 Jan. 2014) --- Russian cosmonaut Oleg Kotov, Expedition 38 commander, uses the Remote Control Panel for the Kaplya-2 experiment in the Rassvet Mini-Research Module 1 (MRM1) of the International Space Station.
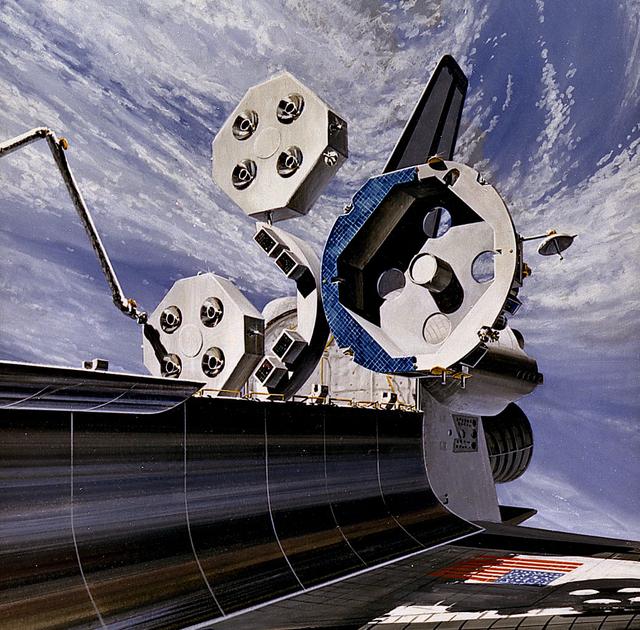
In this 1986 artist's concept, the Orbital Maneuvering Vehicle (OMV), undergoes changeout of the Propulsion Module outside the Space Shuttle Cargo Bay. As envisioned by Marshall Space Flight Center plarners, the OMV would be a remotely-controlled free-flying space tug which would place, rendezvous, dock, and retrieve orbital payloads.

ISS016-E-009295 (3 Nov. 2007) --- Astronaut Stephanie Wilson, STS-120 mission specialist, works the controls of the Space Station Remote Manipulator System (SSRMS) or Canadarm2 in the Destiny laboratory of the International Space Station during flight day 12 activities while Space Shuttle Discovery is docked with the station.