
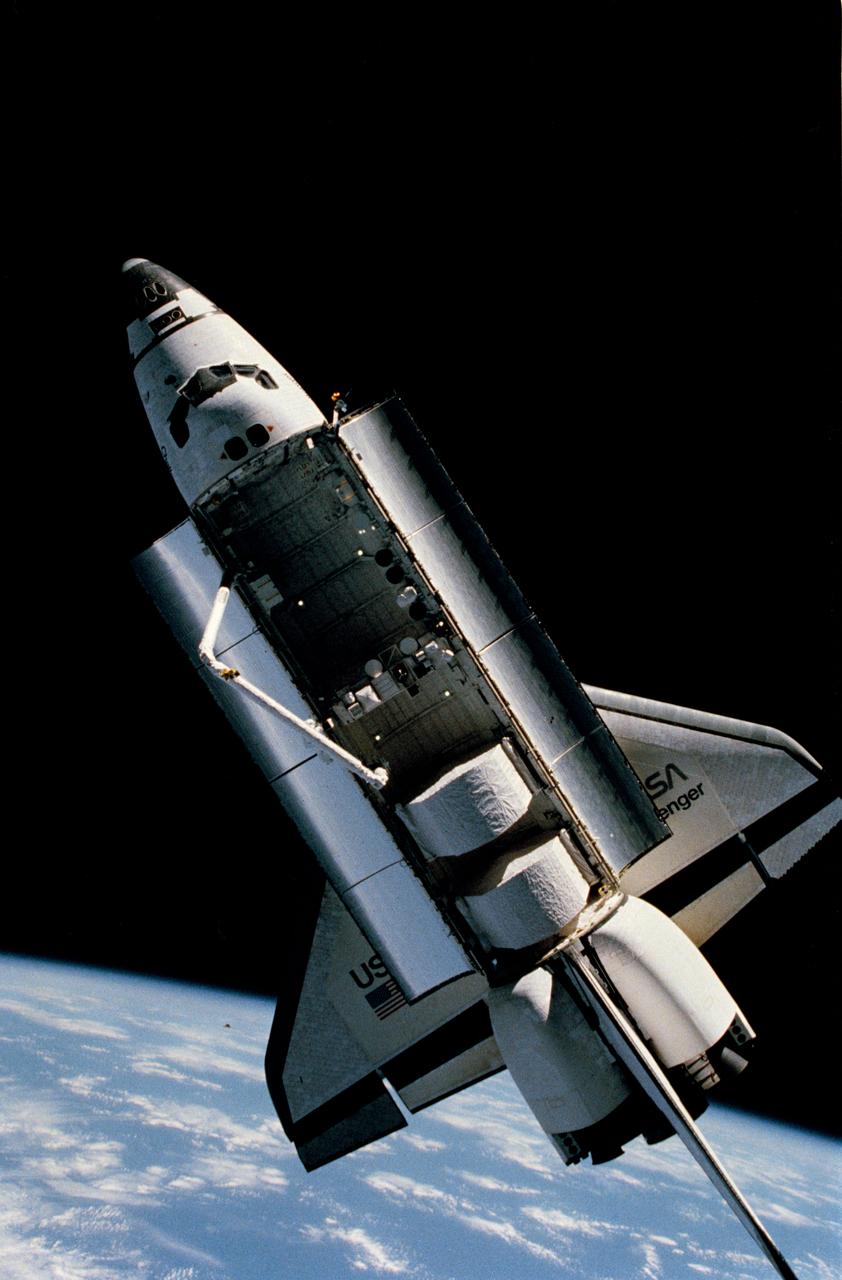
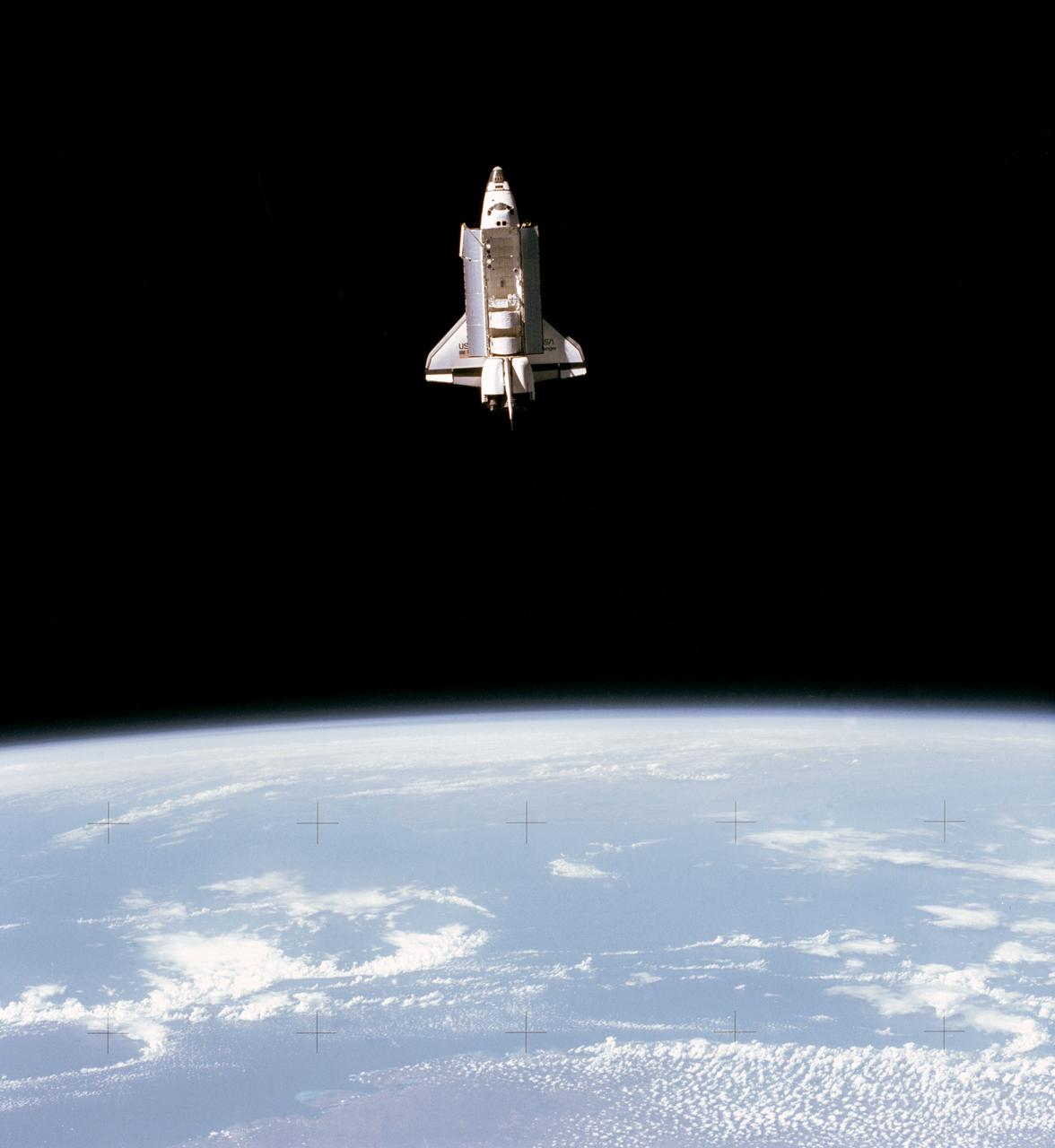
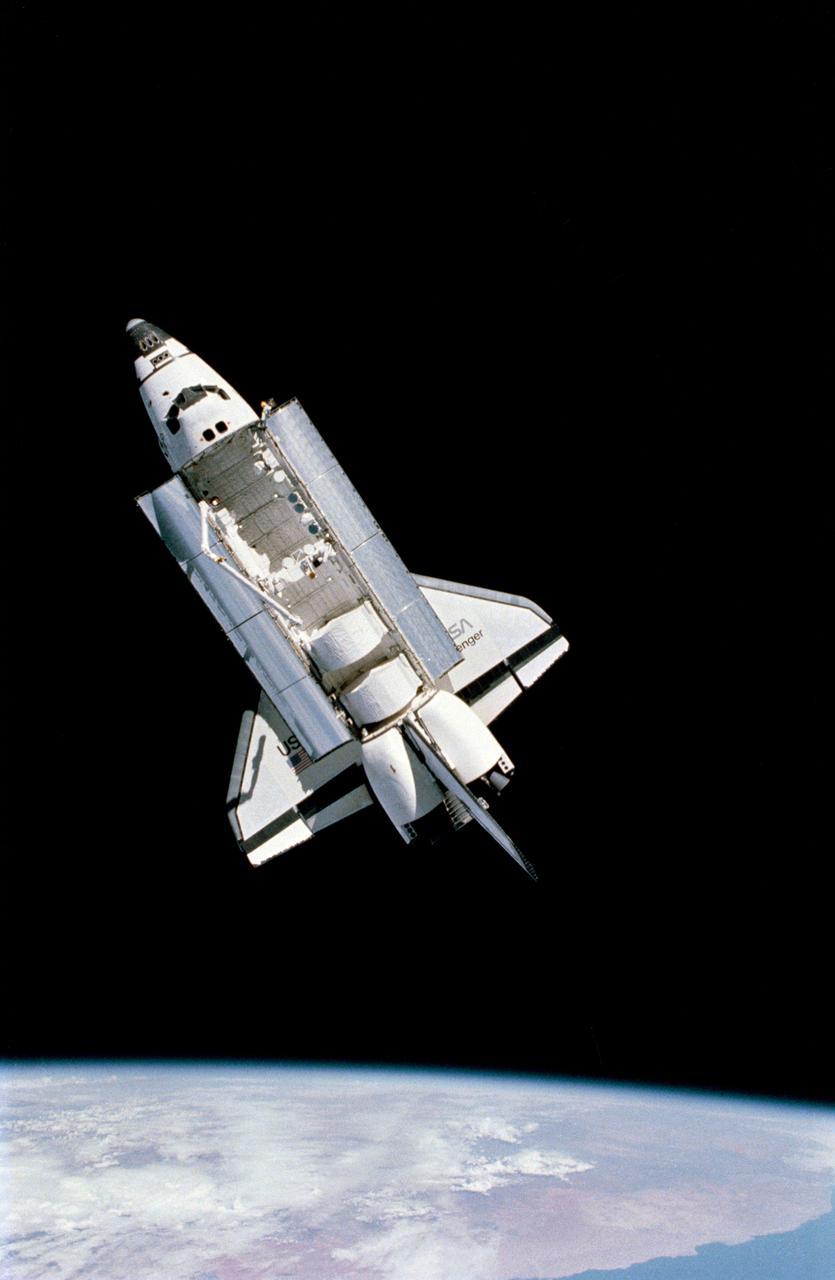
STS007-32-1667 (22 June 1983) --- The Earth-orbiting Space Shuttle Challenger over a heavily cloud-covered portion of the Earth was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa-B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew and the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay of the Space Shuttle Challenger for the return to Earth.

S83-35782 (18 June 1983) --- An Orbital Maneuvering System (OMS) engine firing caused this bright glow at the aft end of the Earth-orbiting space shuttle Challenger on June 18, 1983. Also visible in the 70mm exposure are parts of the Shuttle Pallet Satellite (SPAS-01). The experiment package for NASA's Office of Space and Terrestrial Applications (OSTA-2), the protective cradles for the Indonesian Palapa-B and Telesat Canada Anik C2 satellites, some getaway special (GAS) canisters and the Canadian-built Remote Manipulator System (RMS). The firing took place less than an hour after deployment of Anik. Photo credit: NASA

STS039-17-017 (3 May 1990) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) as it approaches the remote manipulator system (RMS) end effector following a period of free-flight and data collection. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS. A huge blanket of white clouds obscures identifiable points on Earth, nearly 300 statute miles away. The target grappling apparatus on SPAS is clearly seen near bottom center of frame.
S84-27020 (7 Feb 1984) --- A fixed camera on astronaut Bruce McCandless II's helmet recorded this rare scene of the Space Shuttle Challenger some 50 to 60 meters away during a history-making extravehicular activity (EVA), February 7, 1984. The Shuttle Pallet Satellite (SPAS-01A) is configured mid-cargo bay. Astronaut Robert L. Stewart, standing beneath the Remote Manipulator System (RMS) arm, later donned the same Manned Maneuvering Unit (MMU) which afforded McCandless the freedom of movement to record this image. Also visible in the cargo bay are the support stations for the two MMU back-packs, the sunshields for the Palapa B and Westar VI Satellites, KU-Band antenna and a number of Getaway Special (GAS) canisters.

Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN

Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN
Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN
STS080-704-008 (19 Nov.-7 Dec. 1996) --- Backdropped against the blackness of space, the ORPHEUS - Shuttle Pallet Satellite (SPAS) spacecraft is held in the grasp of the space shuttle Columbia's Remote Manipulator System (RMS) during deploy operations in Earth-orbit.
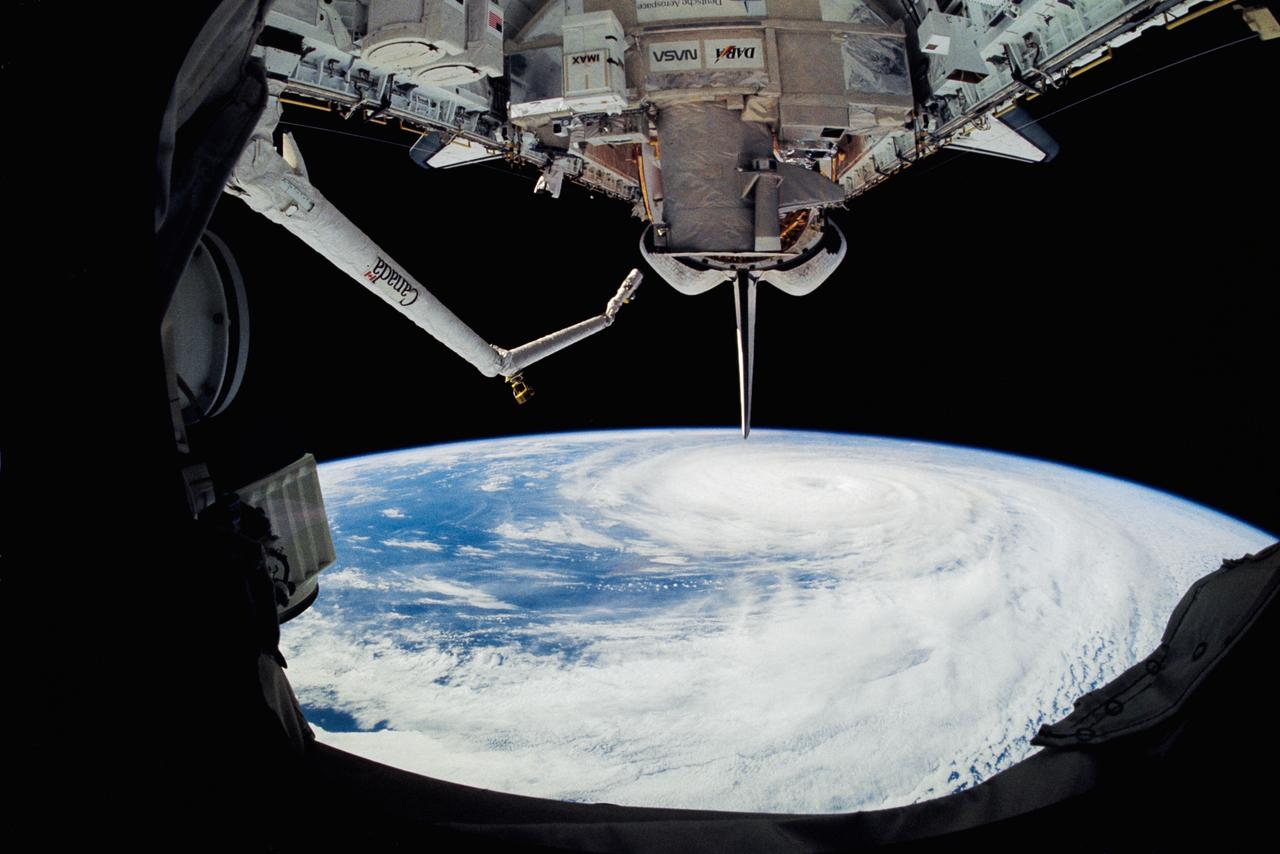
One of the STS-51 astronauts used a "fish-eye" lens on a 35mm cmaera to photograph this view of Hurricane Kenneth in the Pacific Ocean. The Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer/Shuttle Pallet Satellite (ORFEUS/SPAS) is still in the cargo bay. The Remote Manipulator System (RMS) is extended towards the open payload bay.

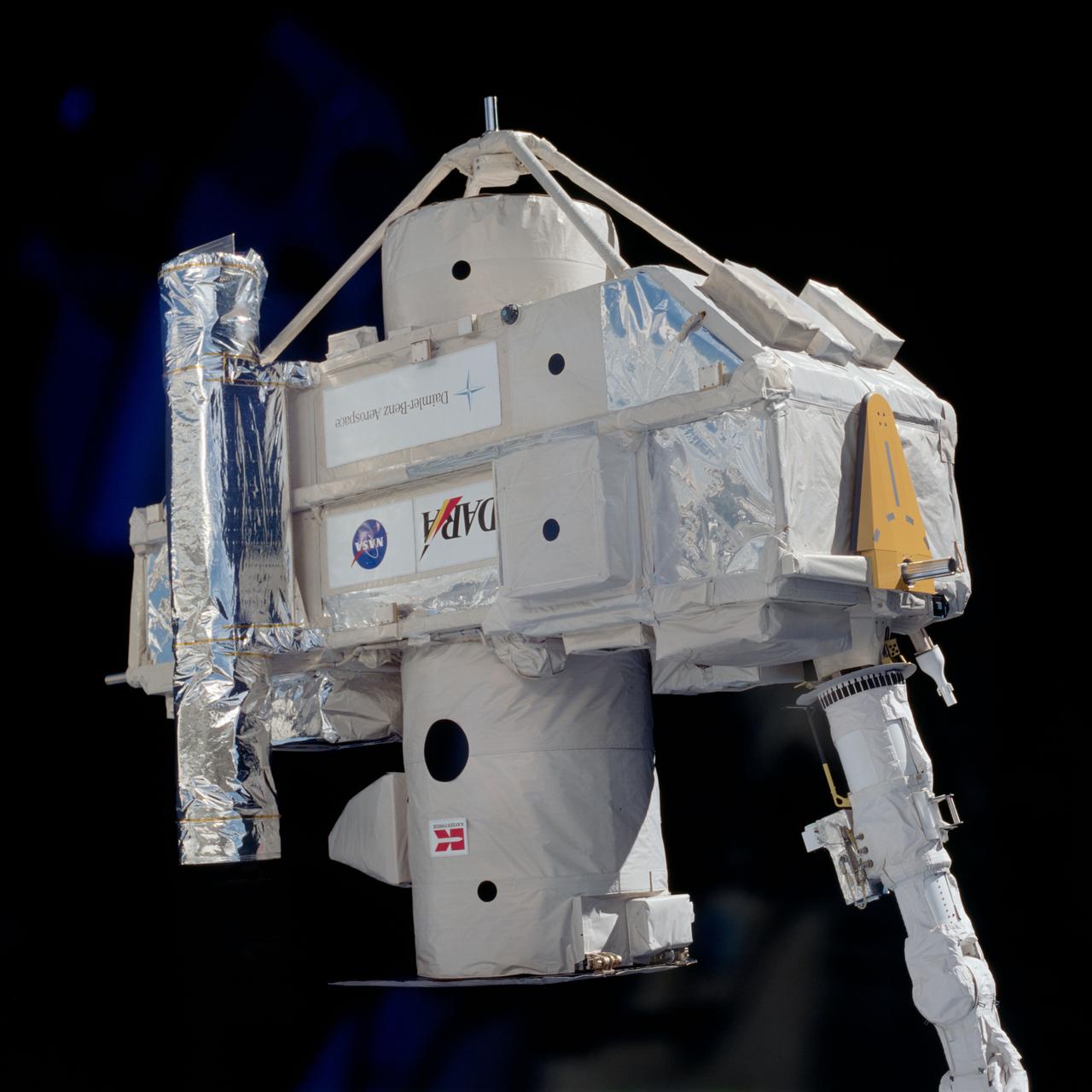
S85-E-5096 (15 August 1997) --- The Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) payload is backdropped against the darkness of space prior to its retrieval by Discovery's remote manipulator system (RMS) on Aug. 16.

STS085-722-087 (7 - 19 August 1997) --- The Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) having just been grappled by the Space Shuttle Discovery's Remote Manipulator System (RMS), is backdropped against Puget Sound and the Seattle, Washington area. A short while later, the satellite was re-berthed in the cargo bay, silhouetted in this 70mm frame. This image was exposed through the aft flight deck windows of Discovery.
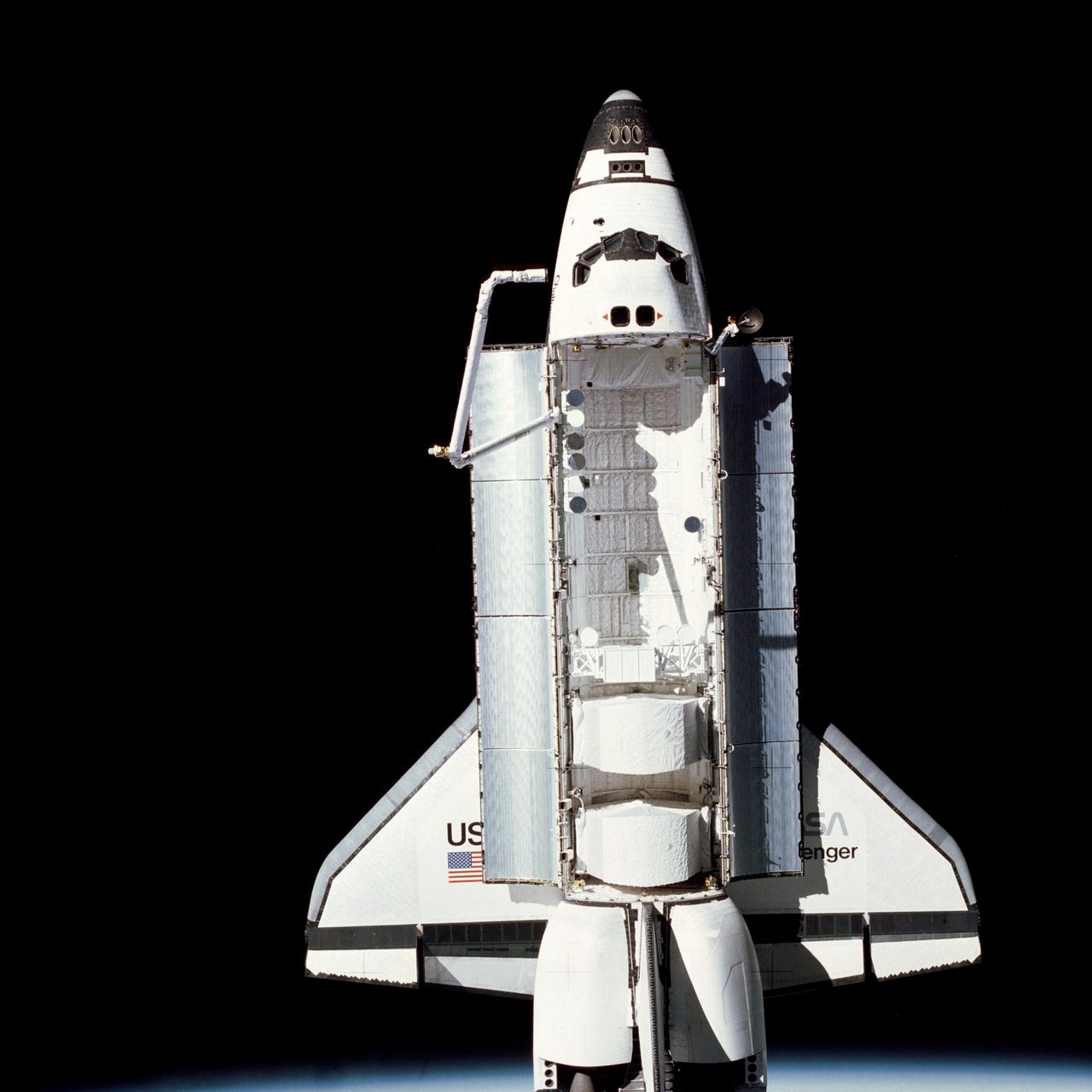
S83-35803 (22 June 1983) --- The Earth-orbiting space shuttle Challenger against the blackness of space was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew with the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay for the return to Earth. Photo credit: NASA

STS051-15-035 (19 Sept 1993) --- Backdropped against black space and the blue and white Earth, the Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer (ORFEUS) and its Shuttle Pallet Satellite (SPAS) are pictured during berthing in Discovery's cargo bay. The free-flying craft had spent several days orbiting at a distance from Discovery with several experiments in operation. Here, the satellite is still in the grasp of the Canadian-built Remote Manipulator System (RMS), which was used also for the earlier deployment.

STS085-312-027 (7 - 19 August 1997) --- Astronaut N. Jan Davis, payload commander, is pictured at the work station for the Remote Manipulator System (RMS) on the aft flight deck of the Space Shuttle Discovery. Davis controlled and oversaw operations with the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) during the 12-day mission in Earth-orbit.
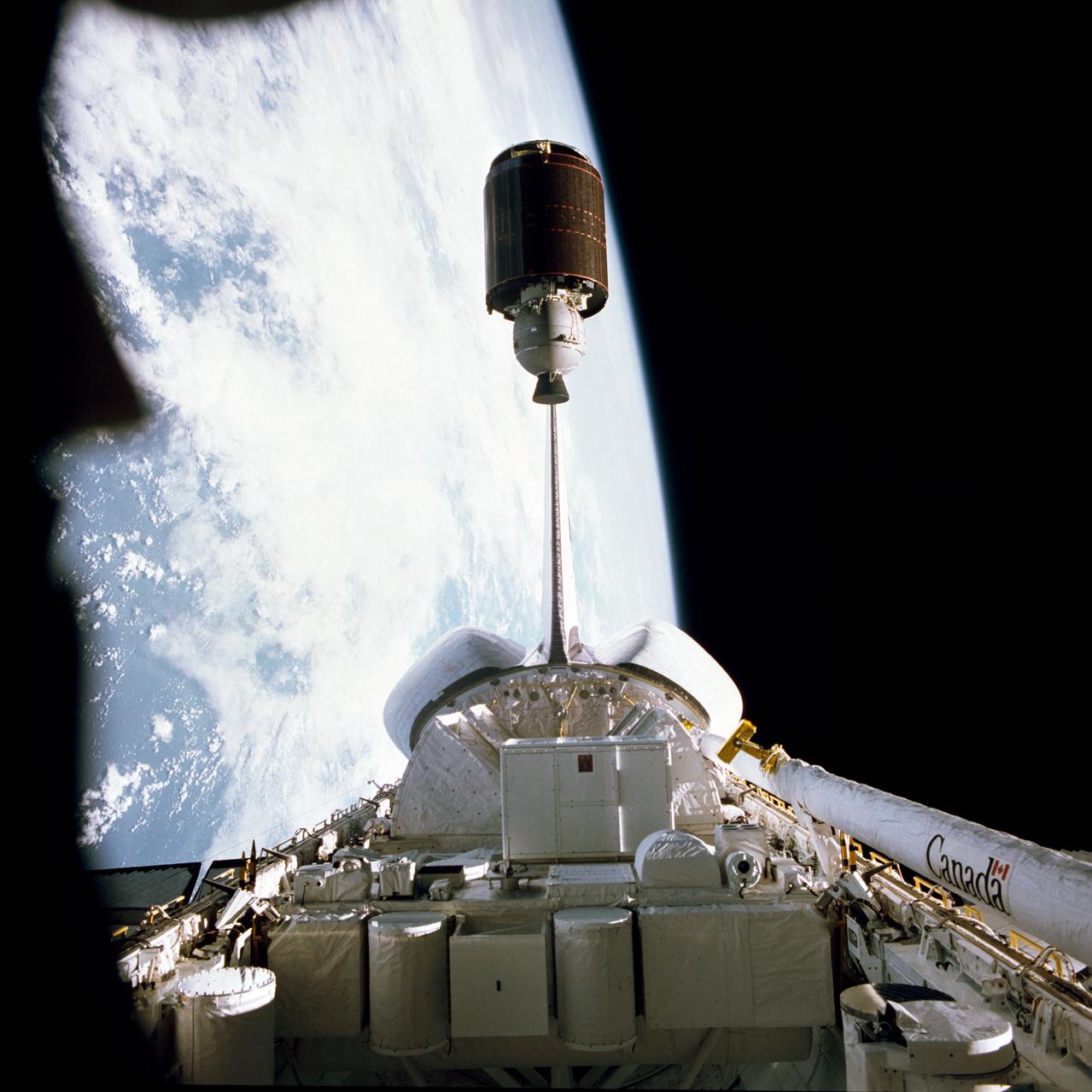
S83-35764 (19 June 1983) --- The Indonesian Palapa B communications satellite is just about to clear the vertical stabilizer of the Earth-orbiting Space Shuttle Challenger to begin its way toward its Earth-orbital destination. Also visible in this 70mm exposure, photographed through the flight deck?s aft windows, are the Shuttle pallet satellite, the experiment package for NASA?s office of space and terrestrial applications (OSTA-2), the now vacated protective cradles for Palapa and Telesat Canada?s Anik C2 satellites, some getaway special (GAS) canisters and the Canadian-built remote manipulator system (RMS) arm.

STS039-19-015 (28 April- 6 May 1991) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) on the end of the remote manipulator system (RMS) end effector. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS.
S84-27022 (7 Feb 1984) --- A 35mm frame from the February 7, 1984, extravehicular activity (EVA) photographed with a camera affixed to the gear of astronaut Bruce McCandless II. The mission specialist was equipped with the nitrogen-propelled, hand-controlled Manned Maneuvering Unit (MMU), which took him some 90 meters away from the Space Shuttle Challenger. This scene is reminiscent of views of the Challenger during the June 1983, STS-7 flight, on which the Shuttle Pallet Satellite (SPAS - seen here in the middle of the cargo bay) provided scenes of 38-meter-long reusable vehicle over the Earth.

STS007-32-1702 (22 June 1983) --- The Earth-orbiting space shuttle Challenger beyond the Earth's horizon was captured by a 70mm camera onboard the unmanned, free-flying Shuttle Pallet Satellite (SPAS-01) during the busy flight day 5 of the STS-7 mission. Visible in the cargo bay are the protective cradles for the now-vacated Telesat Anik C-2 and Palapa B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-02), the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 crew with the RMS later retrieved the SPAS and returned it to a stowed position in the cargo bay for return to Earth. Photo credit: NASA or National Aeronautics and Space Administration
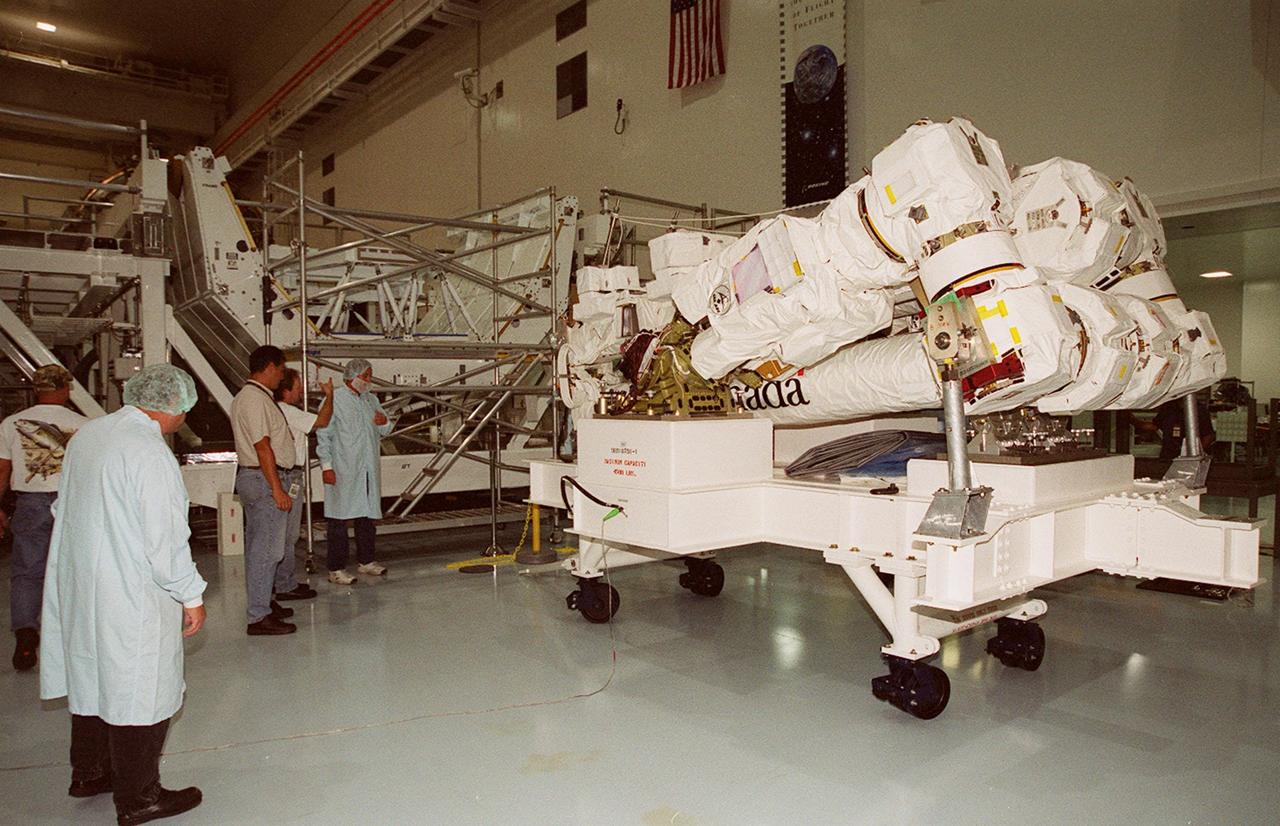
The Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” (at right) arrives at a pallet in the Space Station Processing Facility where it will undergo testing once in place. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
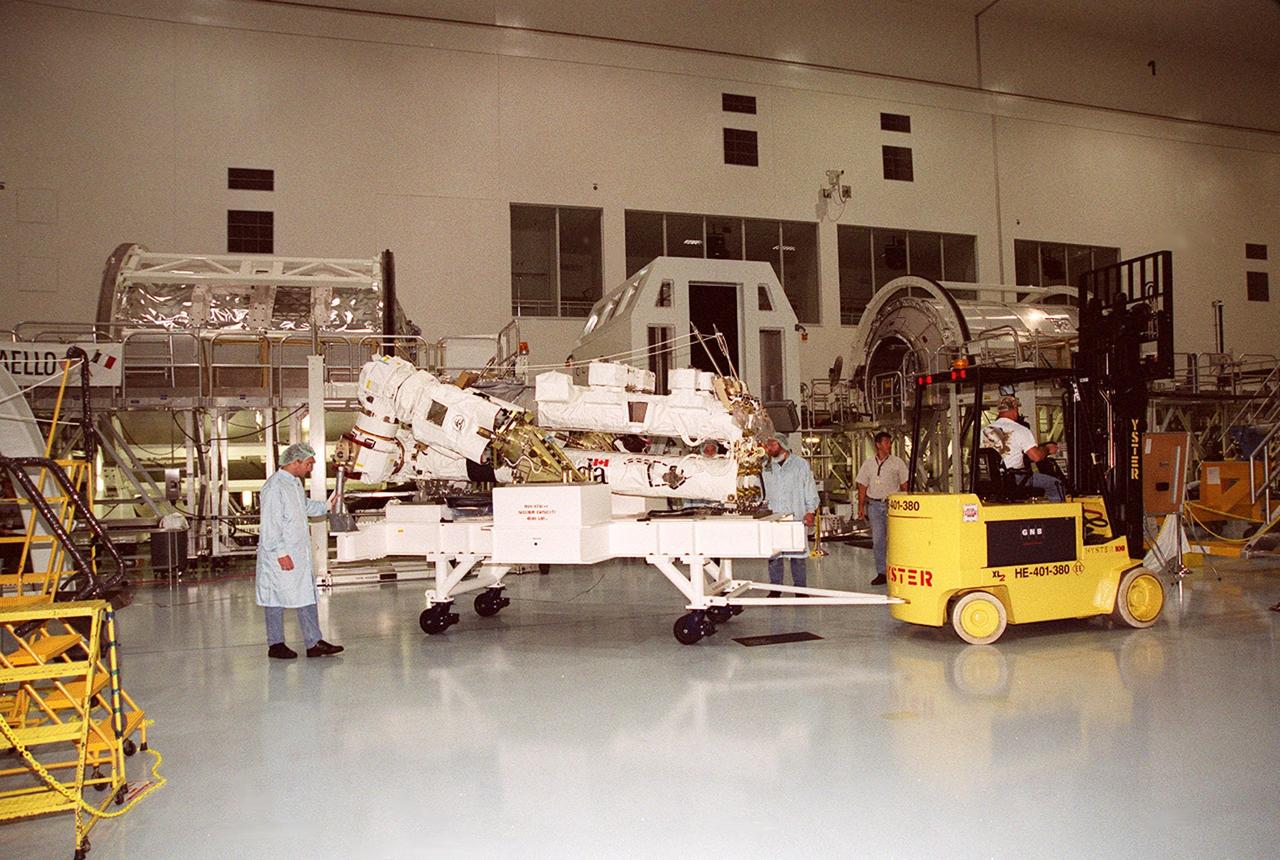
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
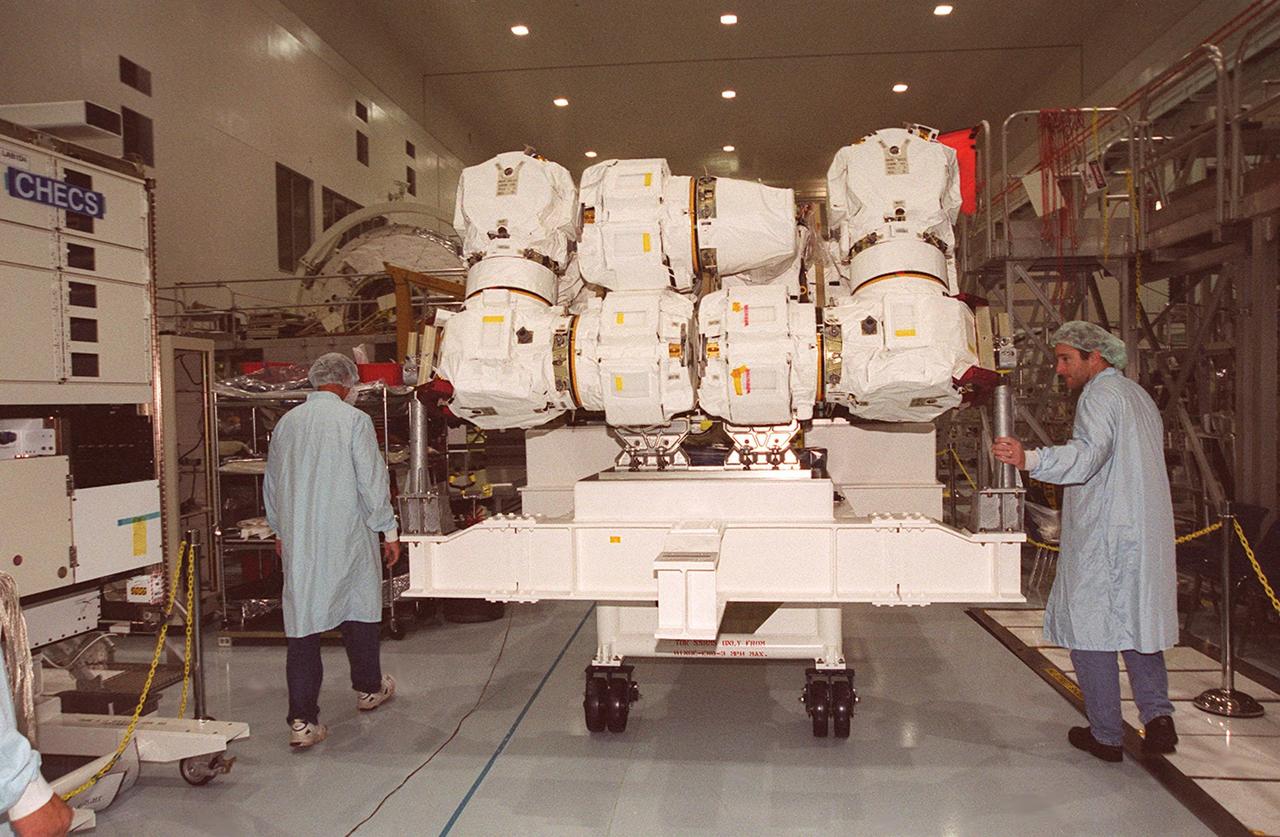
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
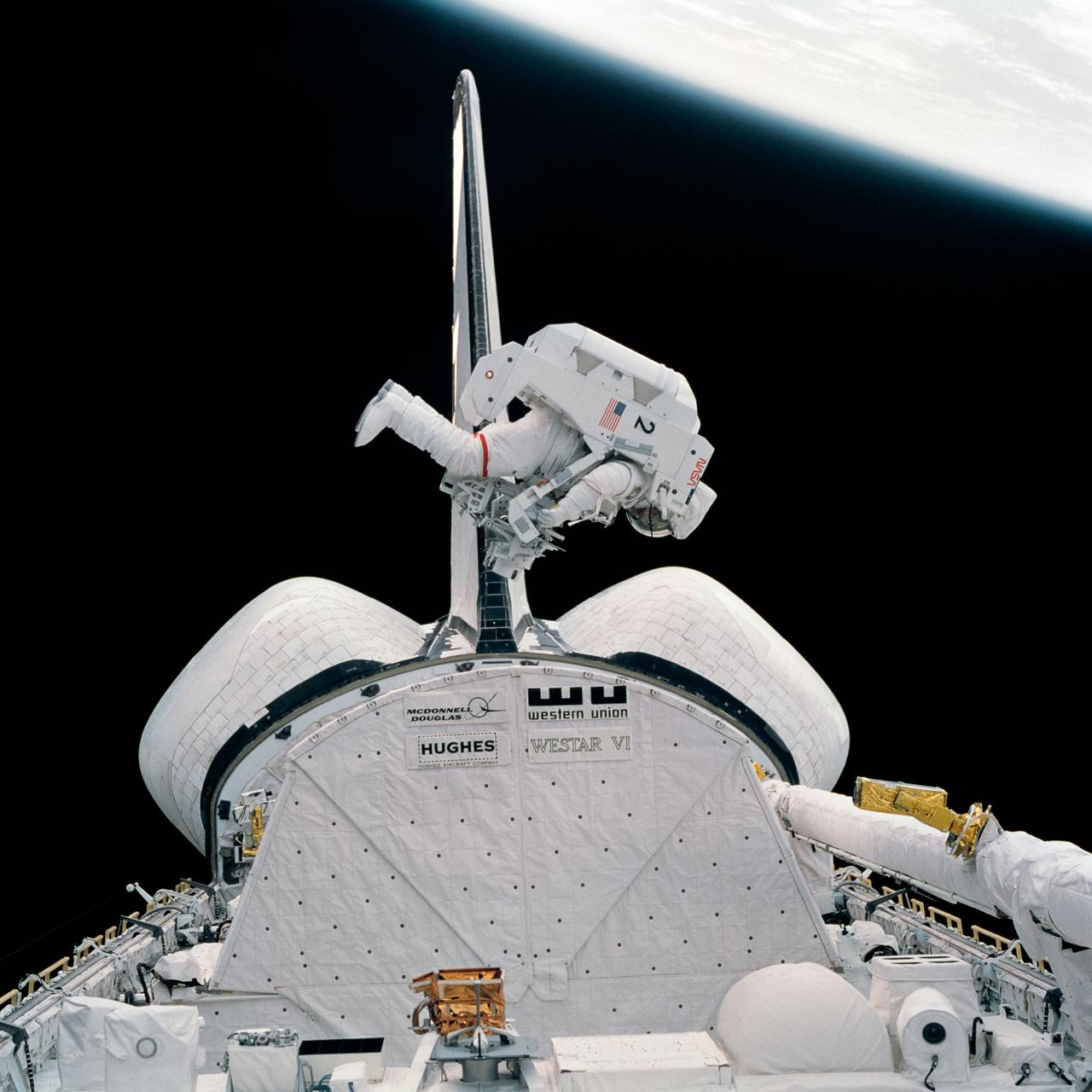
S84-27023 (7 Feb 1984) --- This 70mm frame shows astronaut Bruce McCandless II moving in to conduct a test involving the Trunion Pin Attachment Device (TPAD) he carries and the Shuttle Pallet Satellite (SPAS-01A) partially visible at bottom of frame. SPAS was a stand-in for the damaged Solar Maximum Satellite (SMS) which will be visited for repairs by the STS-41C Shuttle crew in early spring. This particular Extravehicular Activity (EVA) session was a rehearsal for the SMS visit. The test and the actual visit to the SMS both involve the use of jet-powered, hand-controlled Manned Maneuvering Unit (MMU). The one McCandless uses is the second unit to be tested on this flight. Astronaut Robert L. Stewart got a chance to work with both MMU's on the two EVA's.
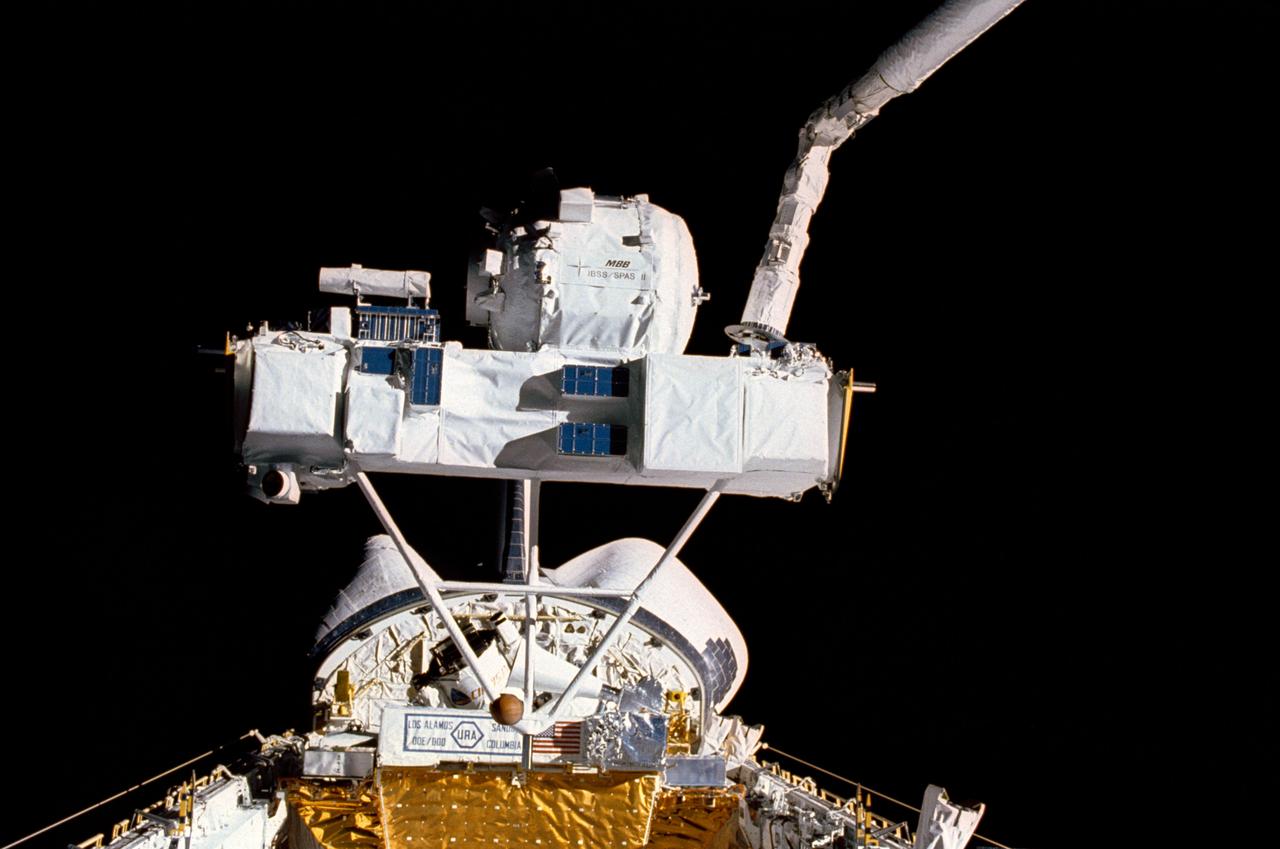
STS039-15-017 (3 May 1990) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) during its berthing following a period of data collection. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the end effector of Discovery's remote manipulator system (RMS). Additional cargo, elements of the Air Force Program (AFP) 675 package, is seen near Discovery's aft bulkhead in the 60-ft. long payload bay.
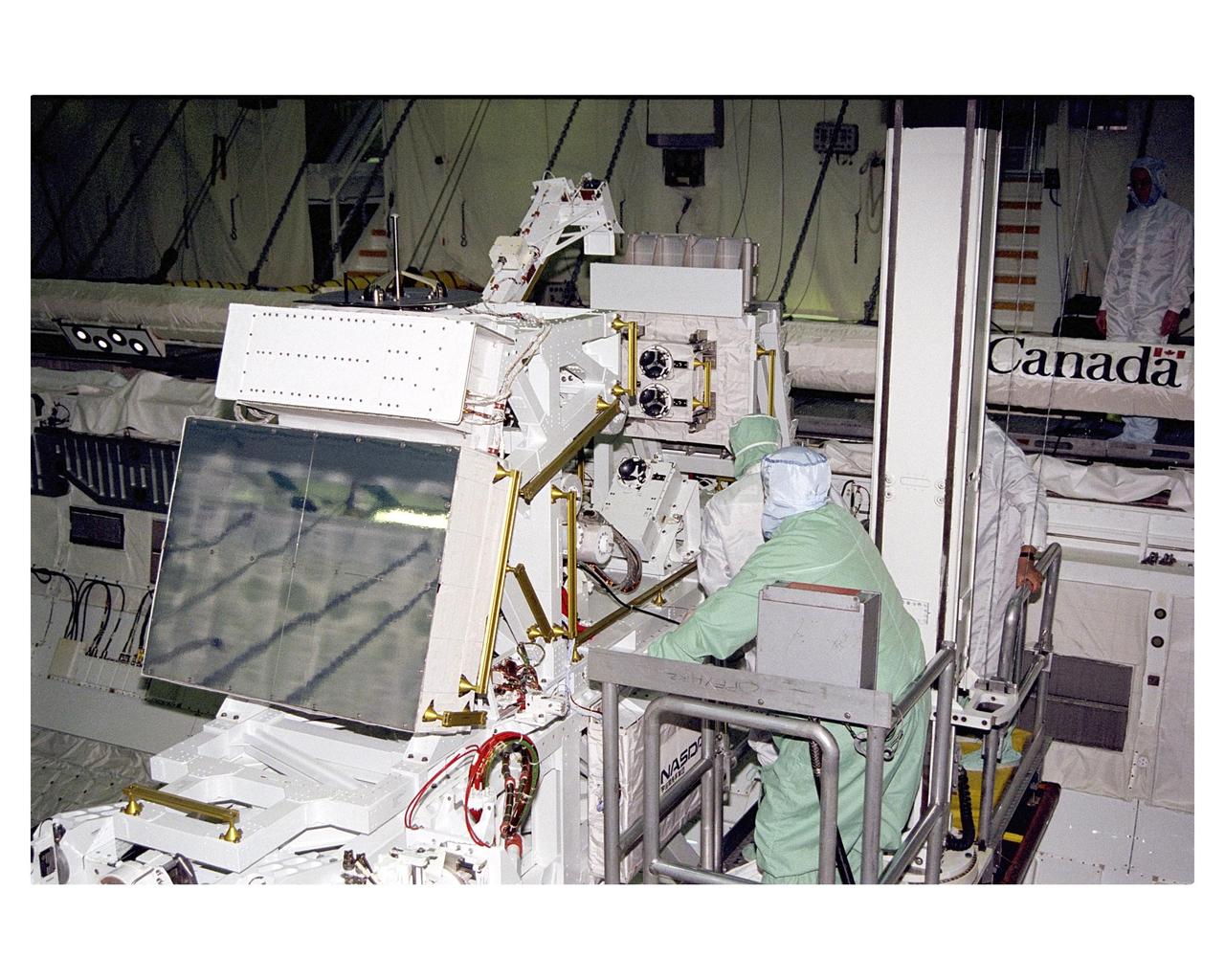
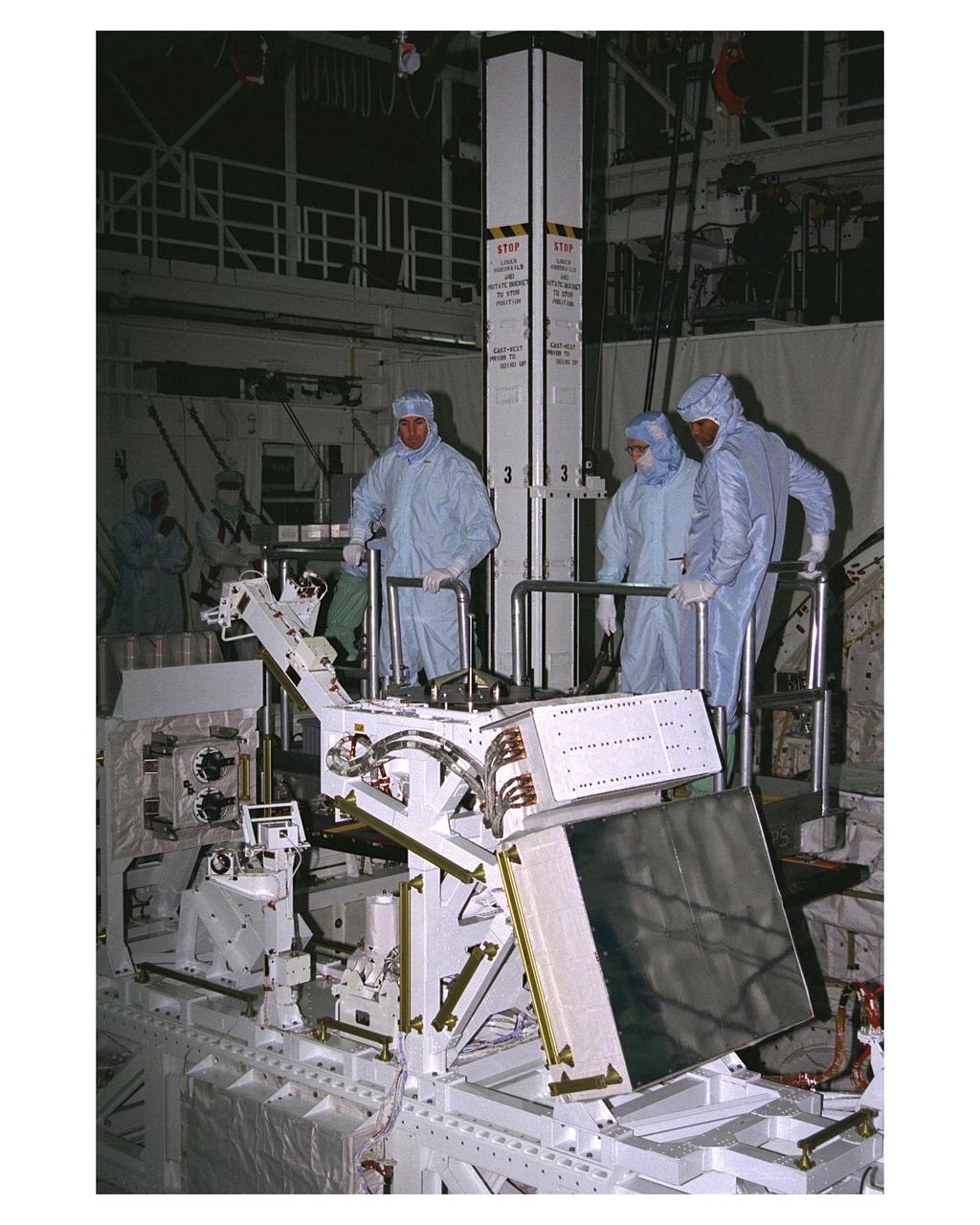
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
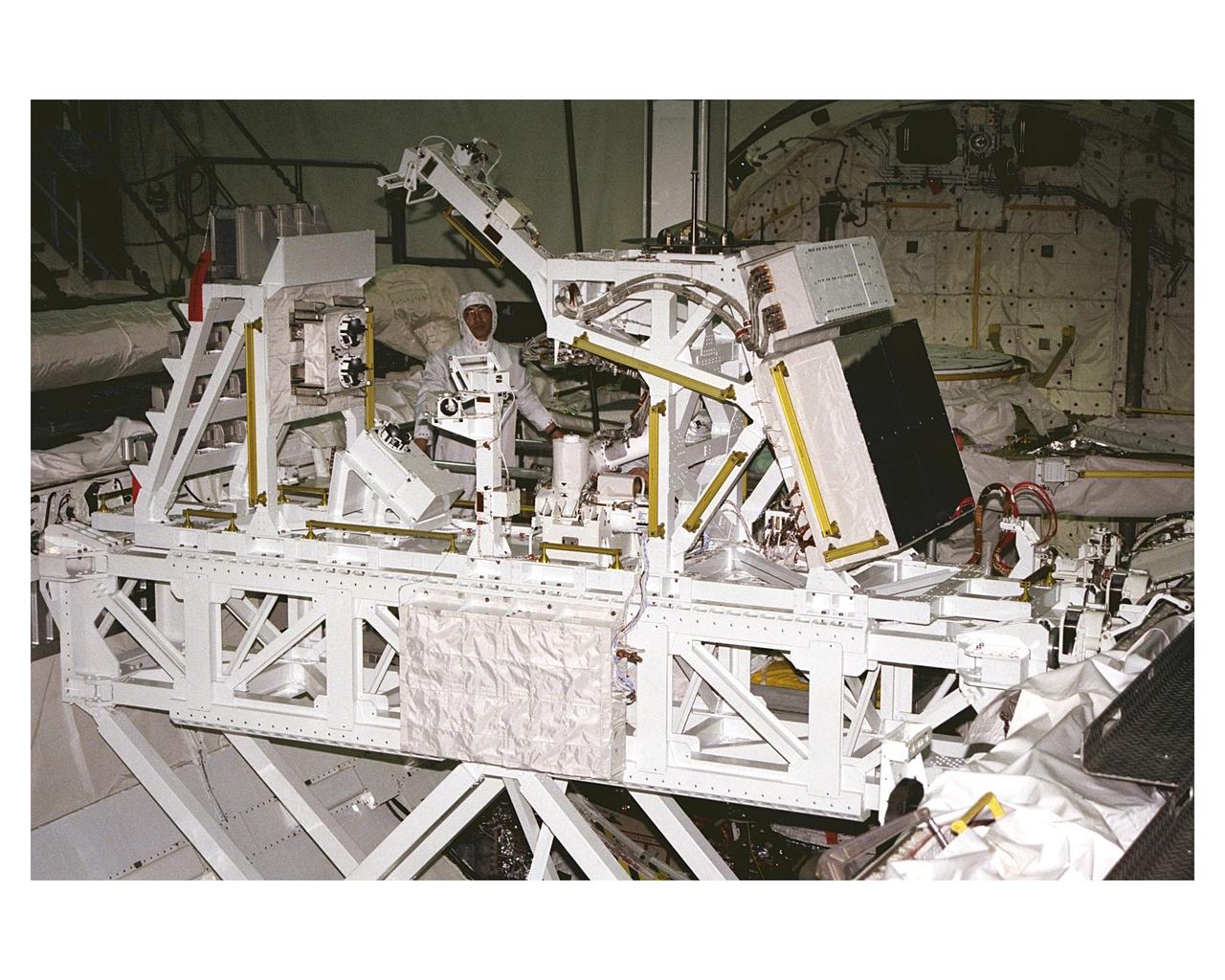
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
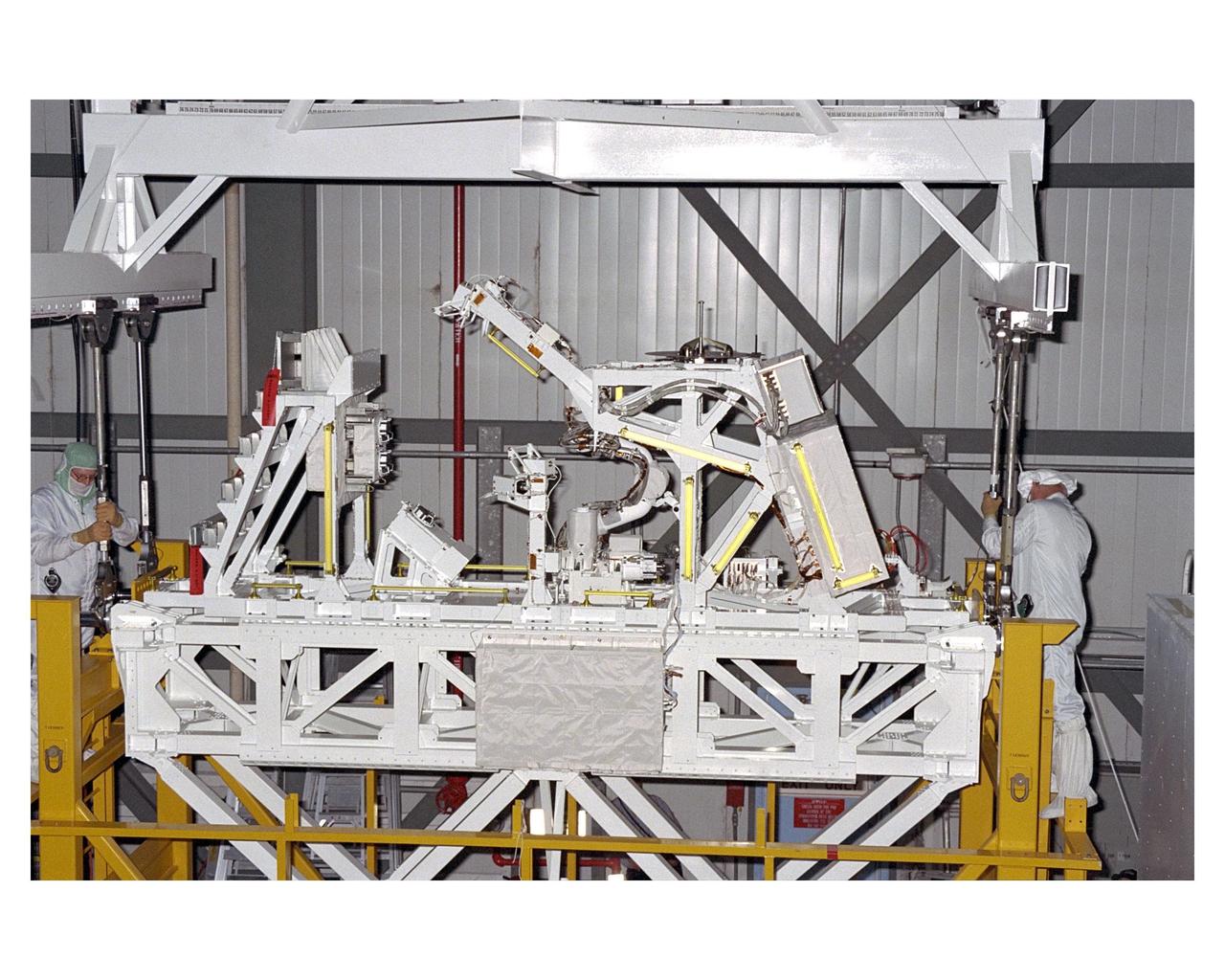
The Manipulator Flight Demonstration (MFD) payload is prepared for hoisting and installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
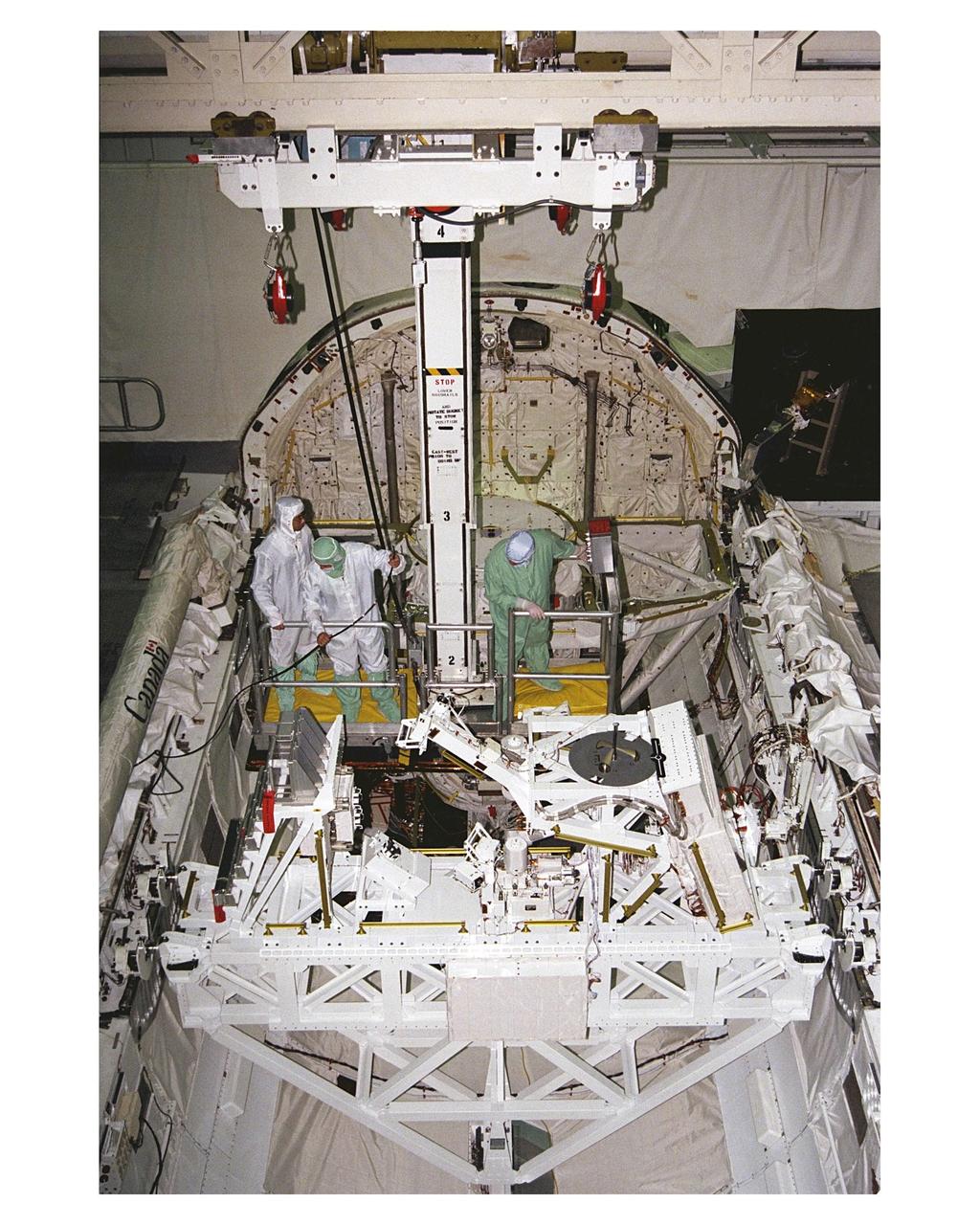
The Manipulator Flight Demonstration (MFD) payload is lowered into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectro-meters and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

The Manipulator Flight Demonstration (MFD) payload is hoisted for installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

STS066-96-030 (3-14 Nov 1994) --- Masses of clouds serve as the backdrop for this close-up 70mm scene of the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere (CRISTA), attached to the Shuttle Pallet Satellite (SPAS). CRISTA-SPAS was in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) arm. The crew deployed the CRISTA-SPAS on November 4, 1994 and the spacecraft remained in free-flight until November 12, 1994 when it was retrieved by the Canadian-built RMS, controlled by payload commander Ellen Ochoa. Other crew members onboard Atlantis were astronauts Donald R. McMonagle, Curtis L. Brown, Jr., Scott E. Parazynski and Joseph R. Tanner, along with Jean-Francois Clervoy of ESA. The six astronauts spent 11-days in Earth-orbit in support of the Atmospheric Laboratory for Applications and Science (ATLAS-3) mission.

S83-35702 (18 June 1983) --- The seventh launch of the NASA Space Transportation System and the second lift-off of the space shuttle Challenger occurred at 7:33 a.m. (EDT) today from the Pad 39A launch site, at the Kennedy Space Center (KSC). The six-day mission will be highlighted by the first direct landing from space by an orbiter to the Shuttle Landing Facility (SLF). The crew consists of astronauts Robert Crippen, commander, the first two-time space shuttle astronaut; Frederick H. Hauck, pilot; and three mission specialists -- Sally K. Ride, John M. Fabian and Norman E. Thagard. During the mission the crew will deploy the Indonesian PALAPA-B and the Canadian ANIK-C communications satellites. They will also use the Remote Manipulator System (RMS) arm to deploy and retrieve a platform for space experiments called the Shuttle Pallet Satellite (SPAS), and serve as a spaceborne laboratory for OSTA-2, a scientific payload. Getaway Special canisters and materials processing experiments will fill out the complement of payloads on the mission. Photo credit: NASA
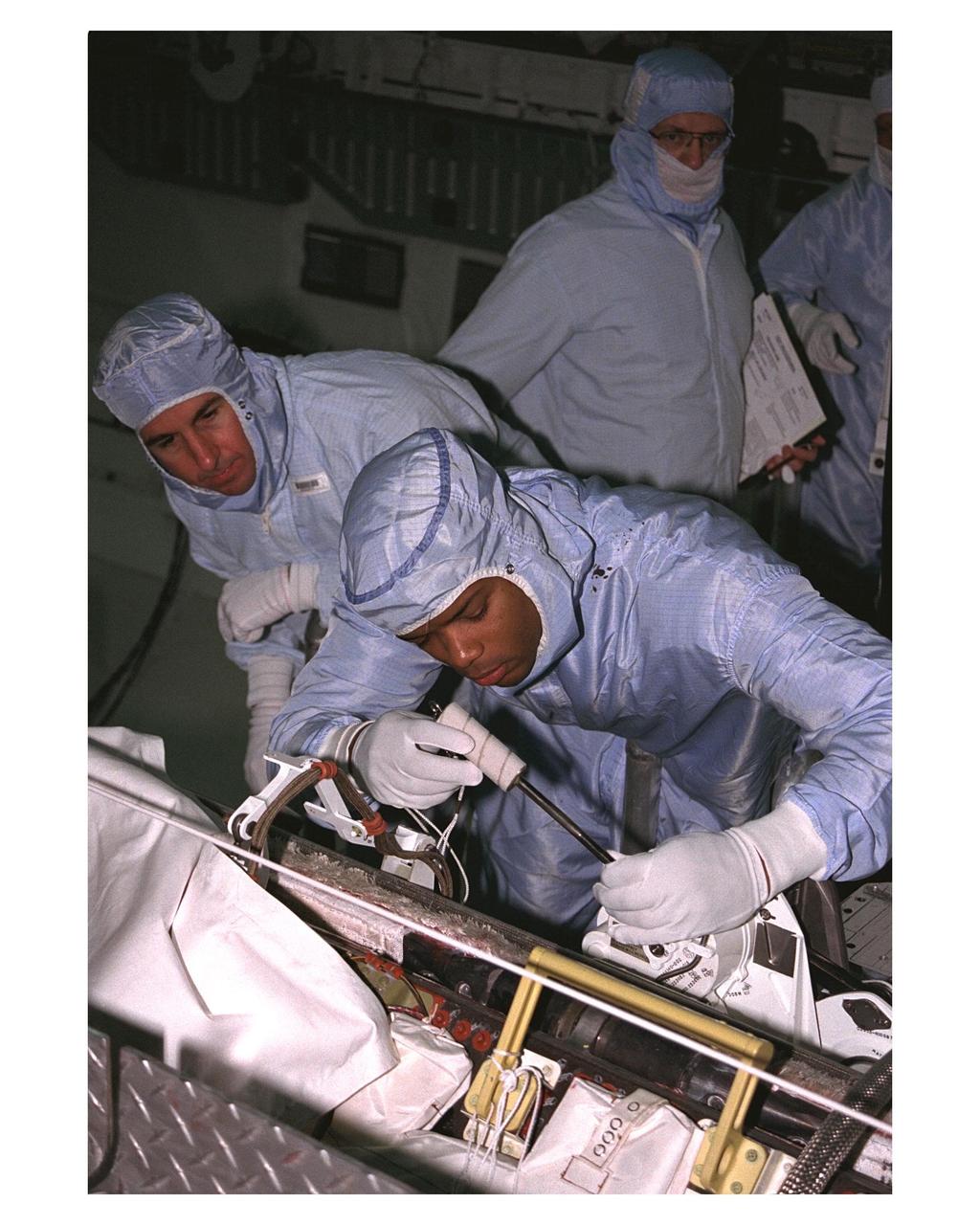
KENNEDY SPACE CENTER, FLA. -- Members of the STS-85 flight crew perform a sharp-edge inspection in the payload bay of the Space Shuttle Orbiter Discovery in the space plane's payload bay during Crew Equipment Interface Test (CEIT) activities for that mission. They are (from left, foreground) Mission Specialists Stephen K. Robinson and Robert L. Curbeam Jr. (right). They are accompanied by a United Space Alliance (USA) payload technician. The Manipulator Flight Demonstration (MFD) payload is one of several that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA). The arm, which will be a part of the JEM element of the Interntional Space Station, will be operated from the orbiter's aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhhiker (IEH-2) experiments.
KENNEDY SPACE CENTER, FLA. -- Members of the STS-85 flight crew examine the Manipulator Flight Demonstraton (MFD) payload in the payload bay of the Space Shuttle Orbiter Discovery during Crew Equipment Interface Test (CEIT) activities for that mission. They are (left) Mission Specialists Stephen K. Robinson and Robert L. Curbeam Jr. (right). They are accompanied by a United Space Alliance (USA) payload technician. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPES) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the Interntional Space Station, will be operated from the orbiter's aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhhiker (IEH-2) experiments.