
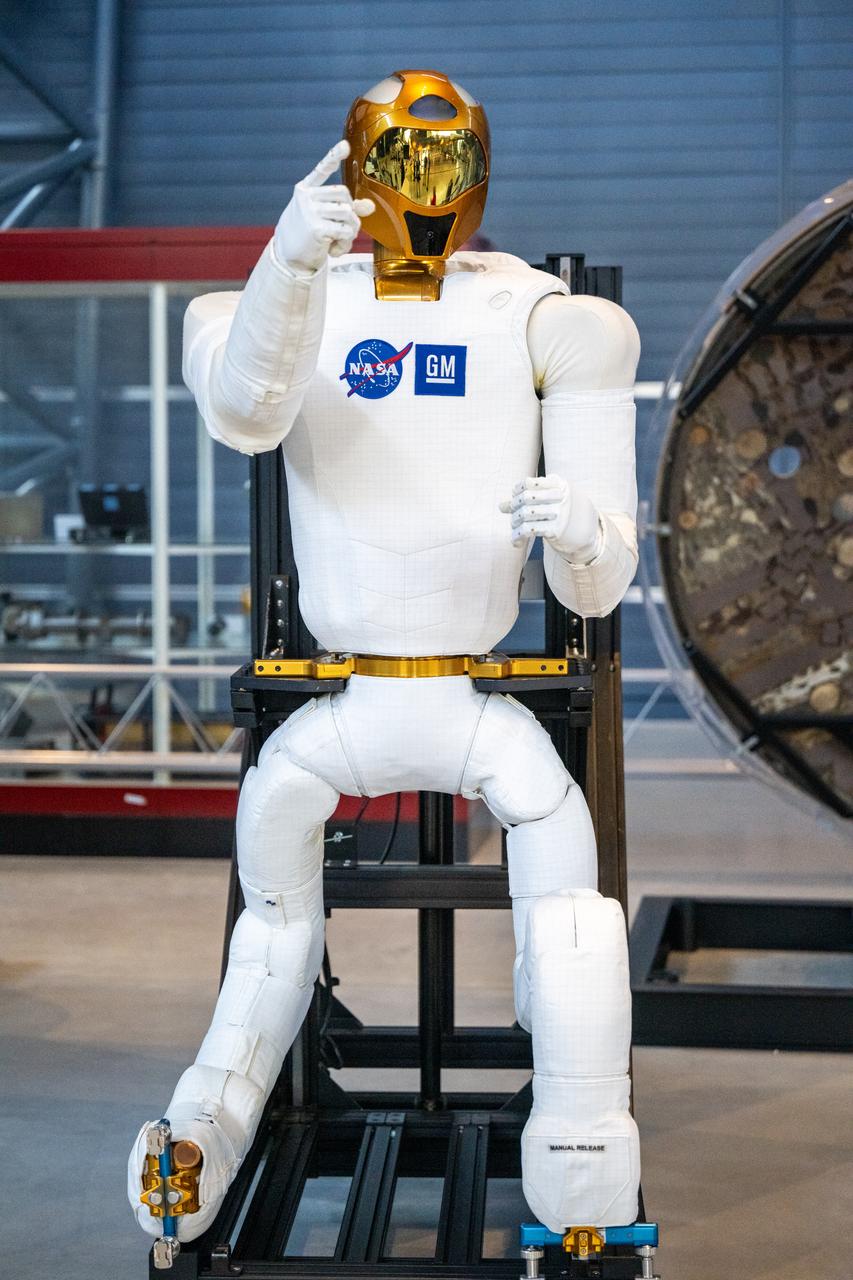
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

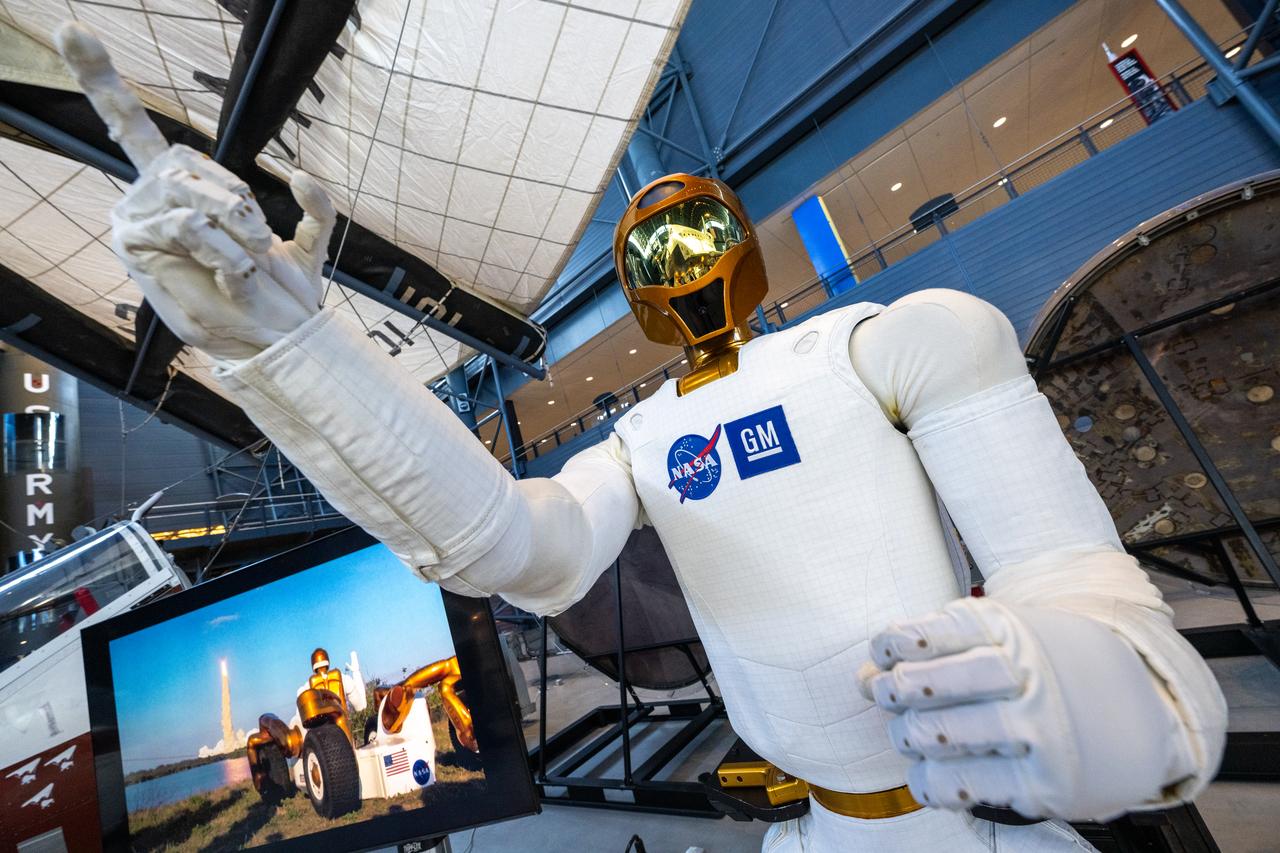
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

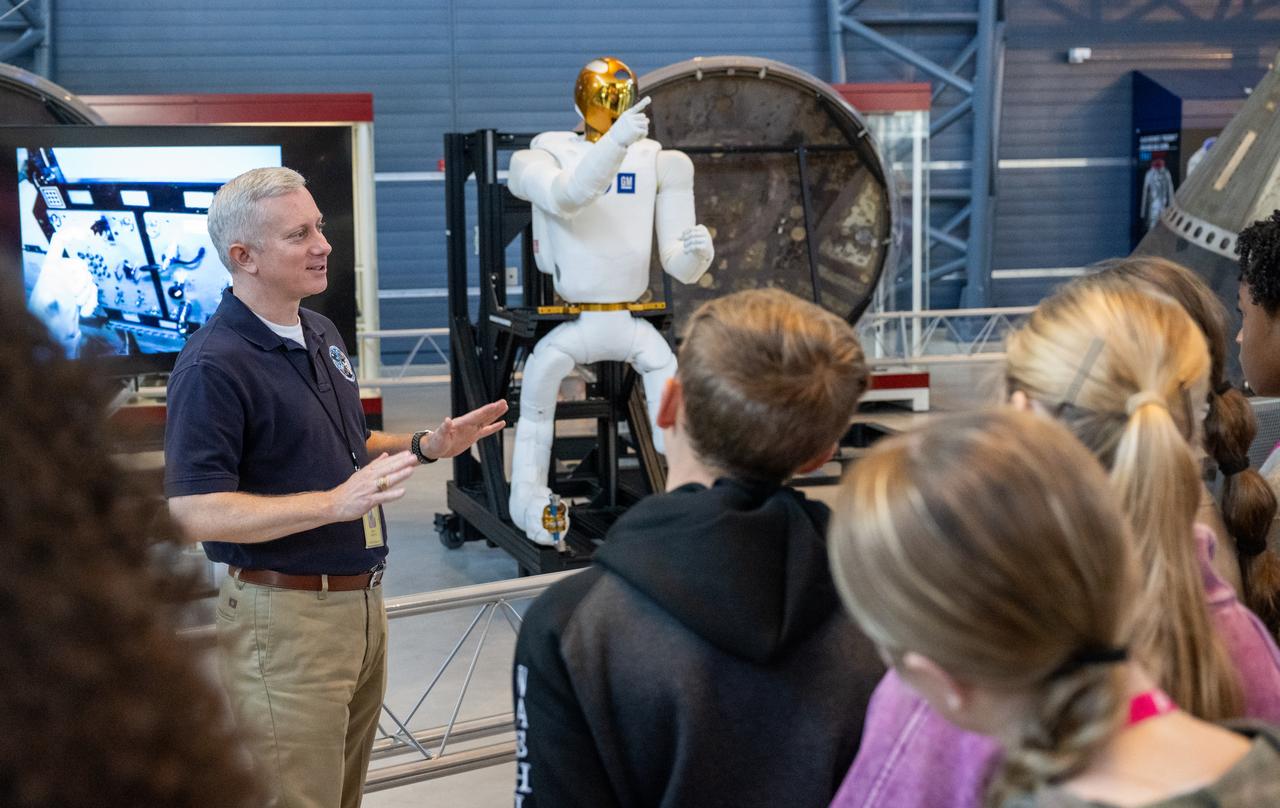
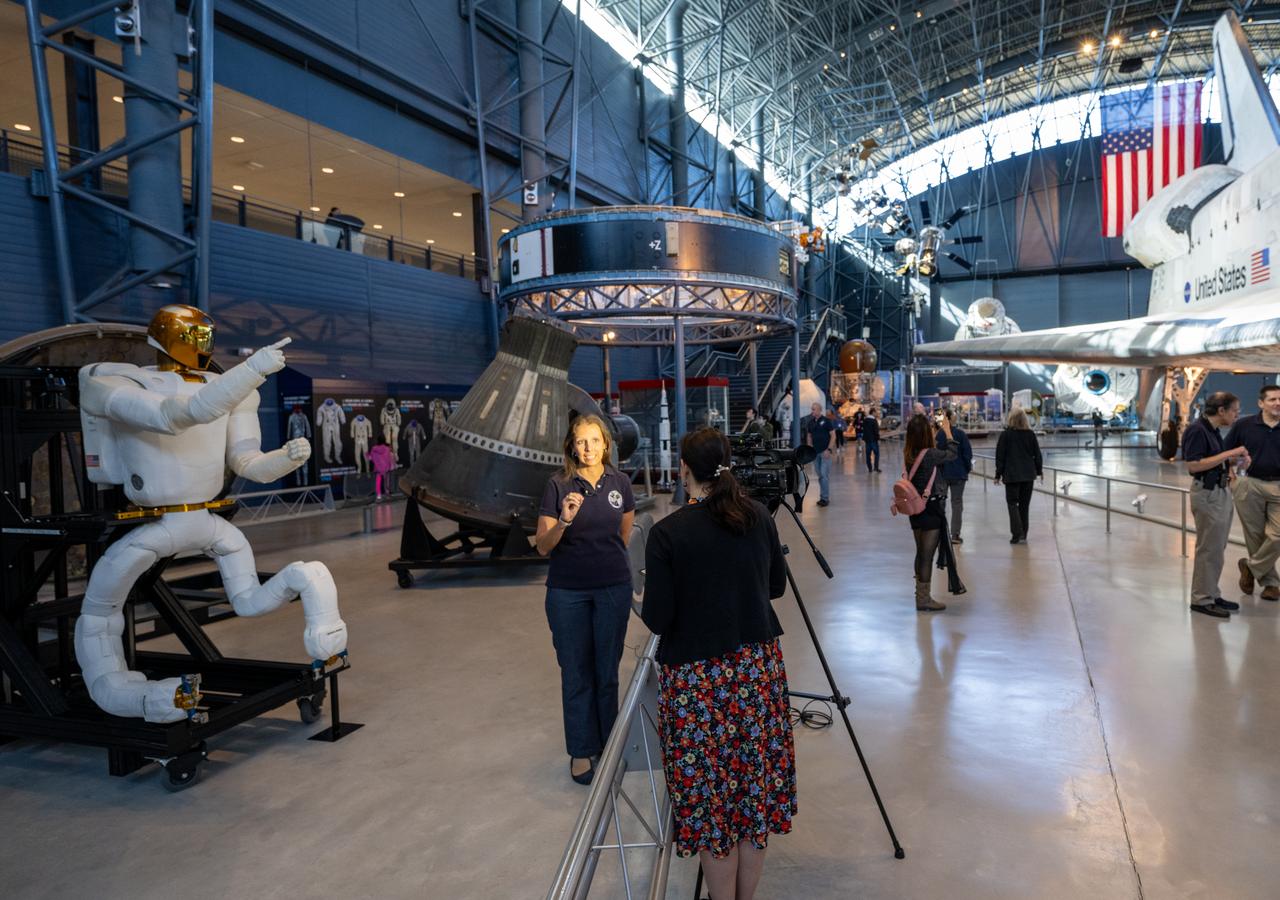
Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, answers questions about Robonaut 2 from museum guests at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, answers questions about Robonaut 2 from museum guests at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
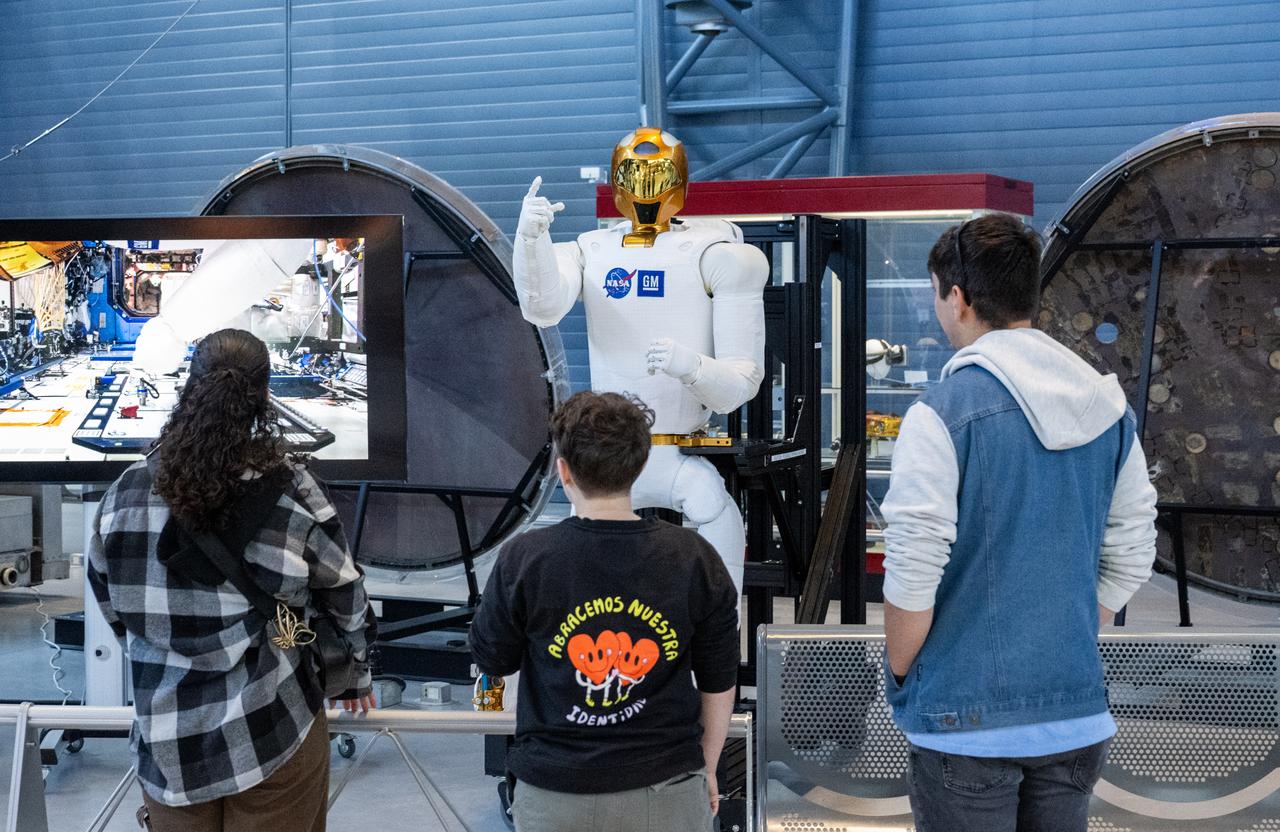
Museum guests view Robonaut 2 at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

NASA Tweetup participants along with NASA engineers and Robonaut 2 stand at the launch clock, Thursday, Feb. 24, 2011, prior to the launch of the space shuttle Discovery (STS-133) at Kennedy Space Center in Cape Canaveral, Fla. During the 11-day mission, Discovery will deliver the Italian-built Permanent Multipurpose Module (PMM) and Express Logistics Carrier 4 (ELC4) along with another Robonaut 2, which will become the first humanoid robot in space. Discovery, on its 39th and final flight, is NASA's most flown shuttle. Photo Credit: (NASA/Paul E. Alers)

Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Space history curator Jennifer Levasseur participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

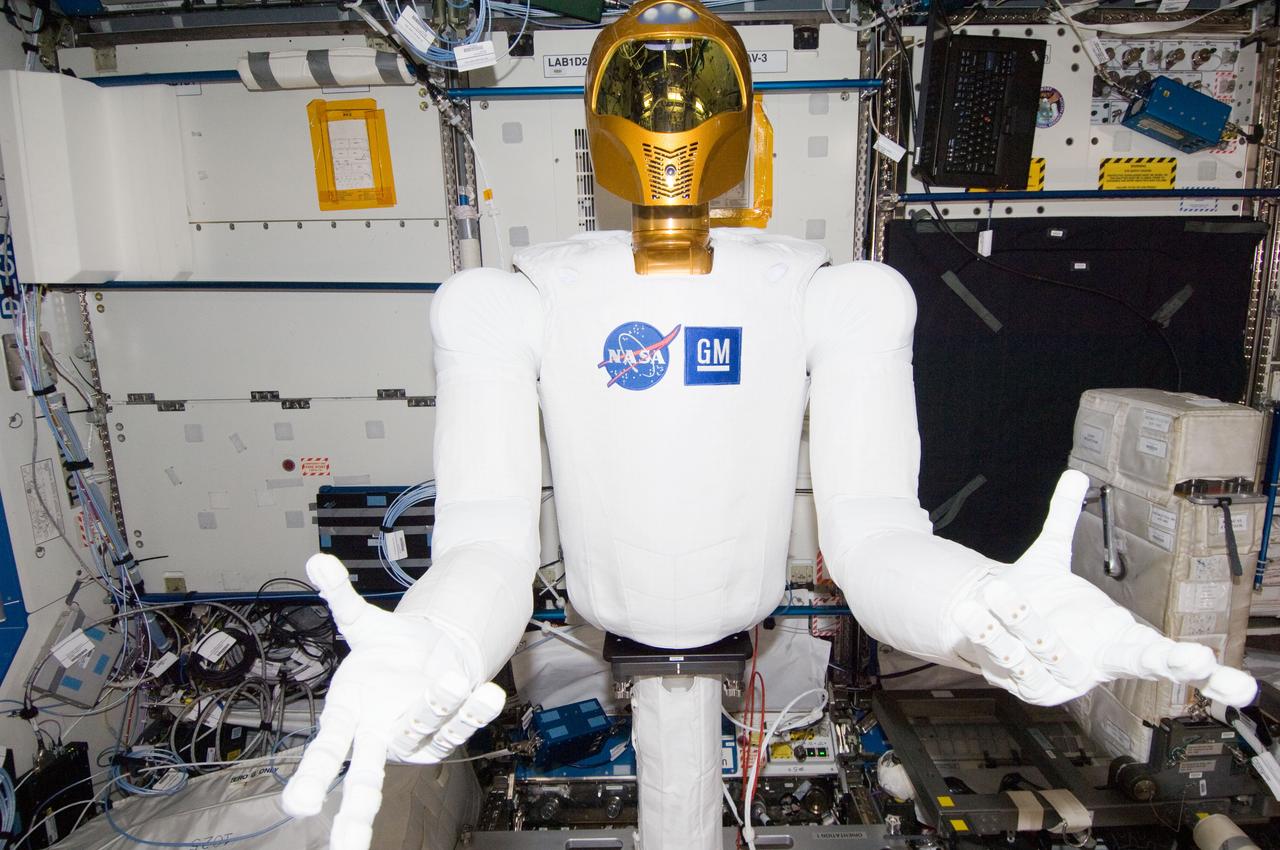
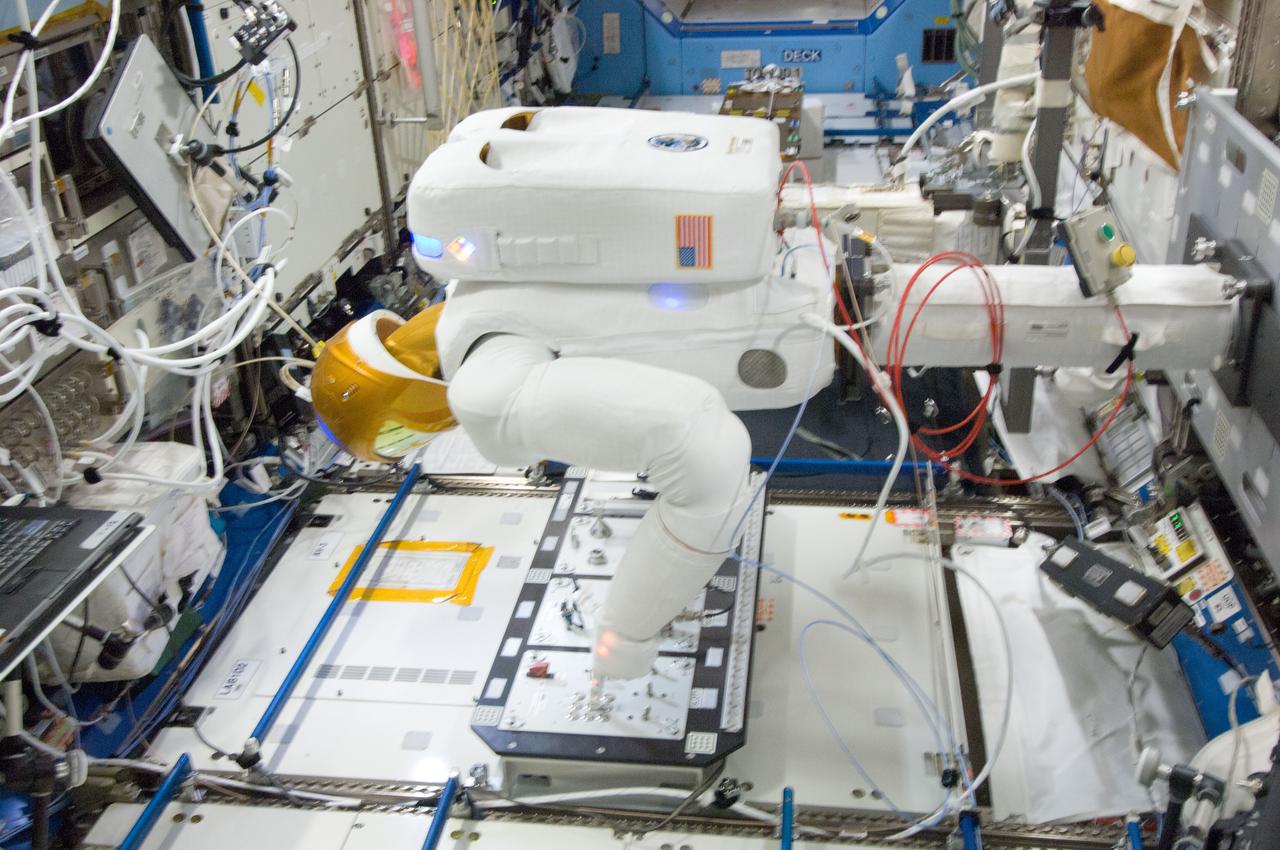
ISS026-E-034306 (15 March 2011) --- Robonaut 2, the dexterous humanoid astronaut helper, is pictured in the Destiny laboratory of the International Space Station.

ISS026-E-034307 (15 March 2011) --- Robonaut 2, the dexterous humanoid astronaut helper, is pictured in the Destiny laboratory of the International Space Station.

NASA astronaut Karen Nyberg,Expedition 36 flight engineer,is pictured with Robonaut 2,the first humanoid robot in space,in the Destiny laboratory of the International Space Station.

ISS036-E-013175 (28 June 2013) --- NASA astronaut Karen Nyberg, Expedition 36 flight engineer, is pictured with Robonaut 2, the first humanoid robot in space, in the Destiny laboratory of the International Space Station.

View of Astronaut Karen Nyberg, Expedition 36 flight engineer, performing Robonaut Teleops activities with Robonaut 2,the first humanoid robot in space,in the Destiny laboratory of the International Space Station. Sent also as Twitter message.

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center in Florida, technicians prepare a working model of the dexterous humanoid astronaut helper, Robonaut 2, for the media to check out before space shuttle Discovery's final flight on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center in Florida, technicians prepare a working model of the dexterous humanoid astronaut helper, Robonaut 2, for the media to check out before space shuttle Discovery's final flight on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder

ISS034-E-013990 (2 Jan. 2013) --- In the International Space Station’s Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.

View of Robonaut 2 during a round of testing,in the U.S. Laboratory. Photo was taken during Expedition 34.

ISS030-E-075365 (14 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.

ISS026-E-034297 (15 March 2011) --- NASA astronaut Cady Coleman, Expedition 26/27 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS036-E-022474 (22 July 2013) --- NASA astronaut Karen Nyberg, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, in the Destiny laboratory of the International Space Station.

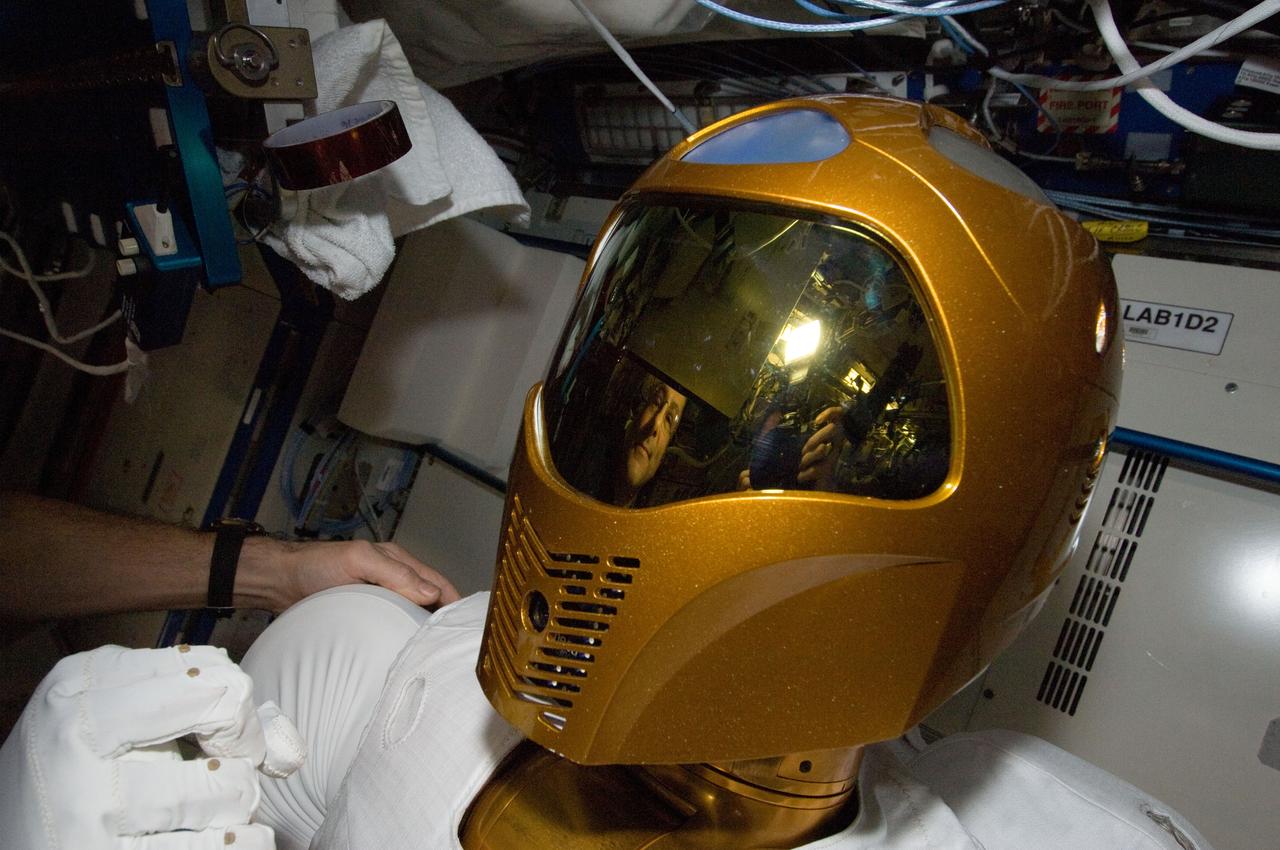
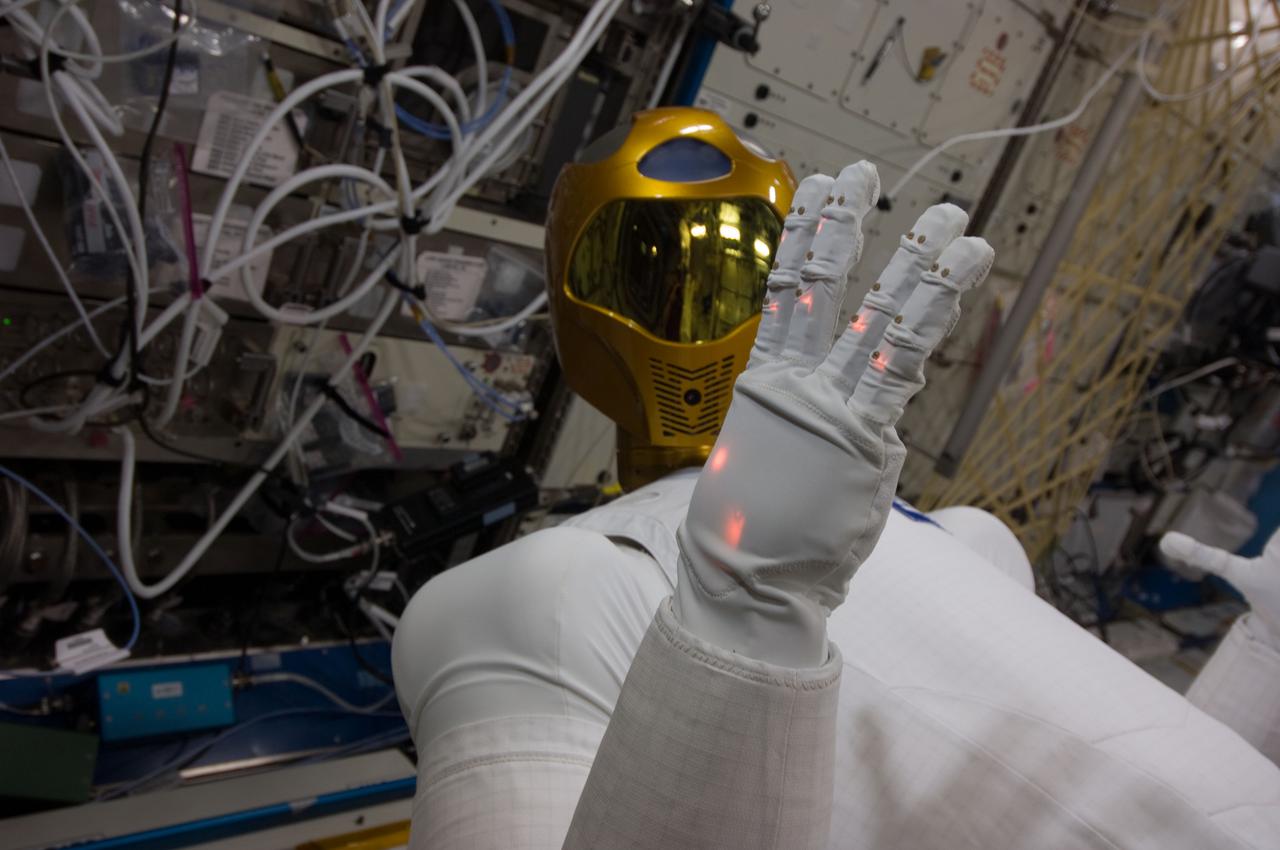
ISS030-E-075366 (14 Feb. 2012) --- A close-up of the head of Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.
ISS030-E-148256 (13 March 2012) --- Robonaut 2 humanoid robot is featured in this image photographed by an Expedition 30 crew member during another system check out in the Destiny laboratory of the International Space Station.

ISS030-E-074075 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, and NASA astronaut Dan Burbank, Expedition 30 commander, are pictured in the Destiny laboratory of the International Space Station during R2?s initial checkouts.
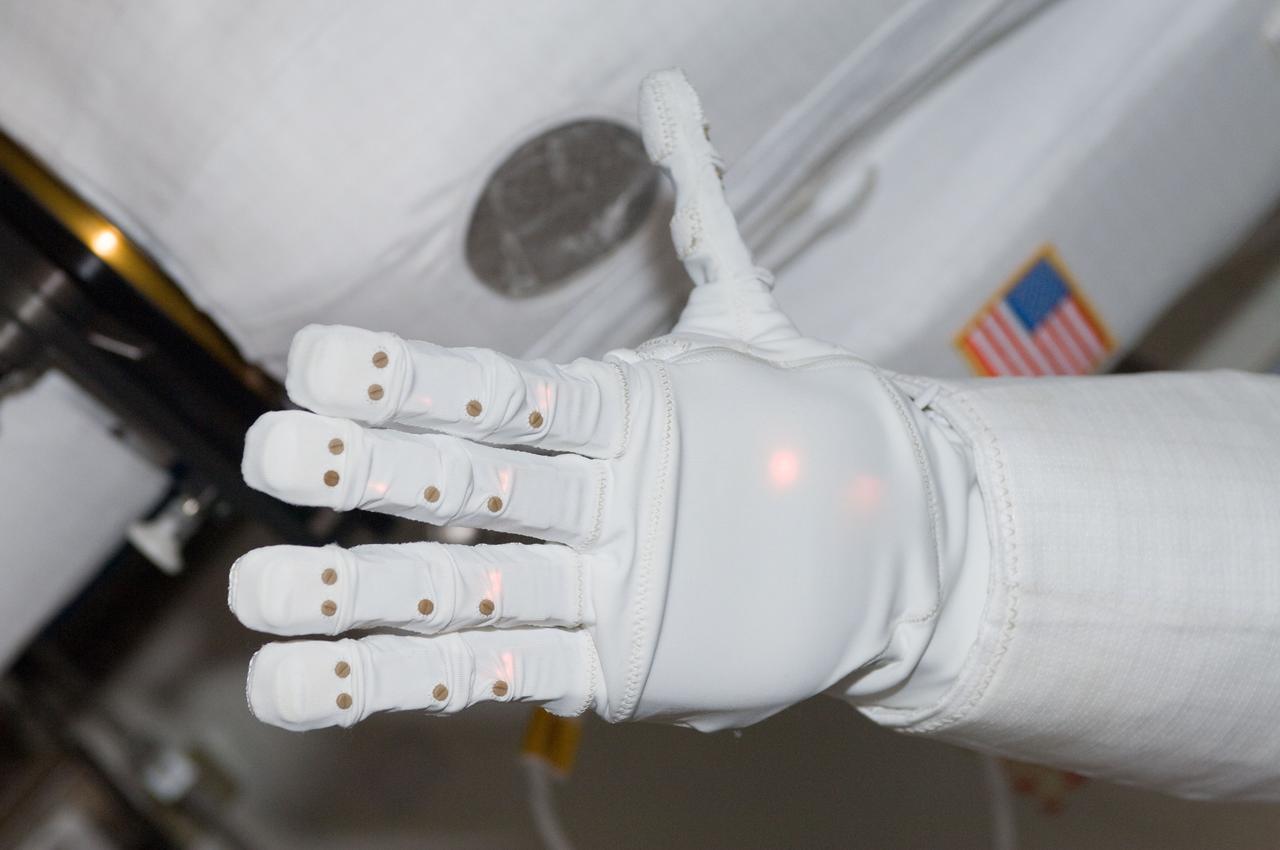
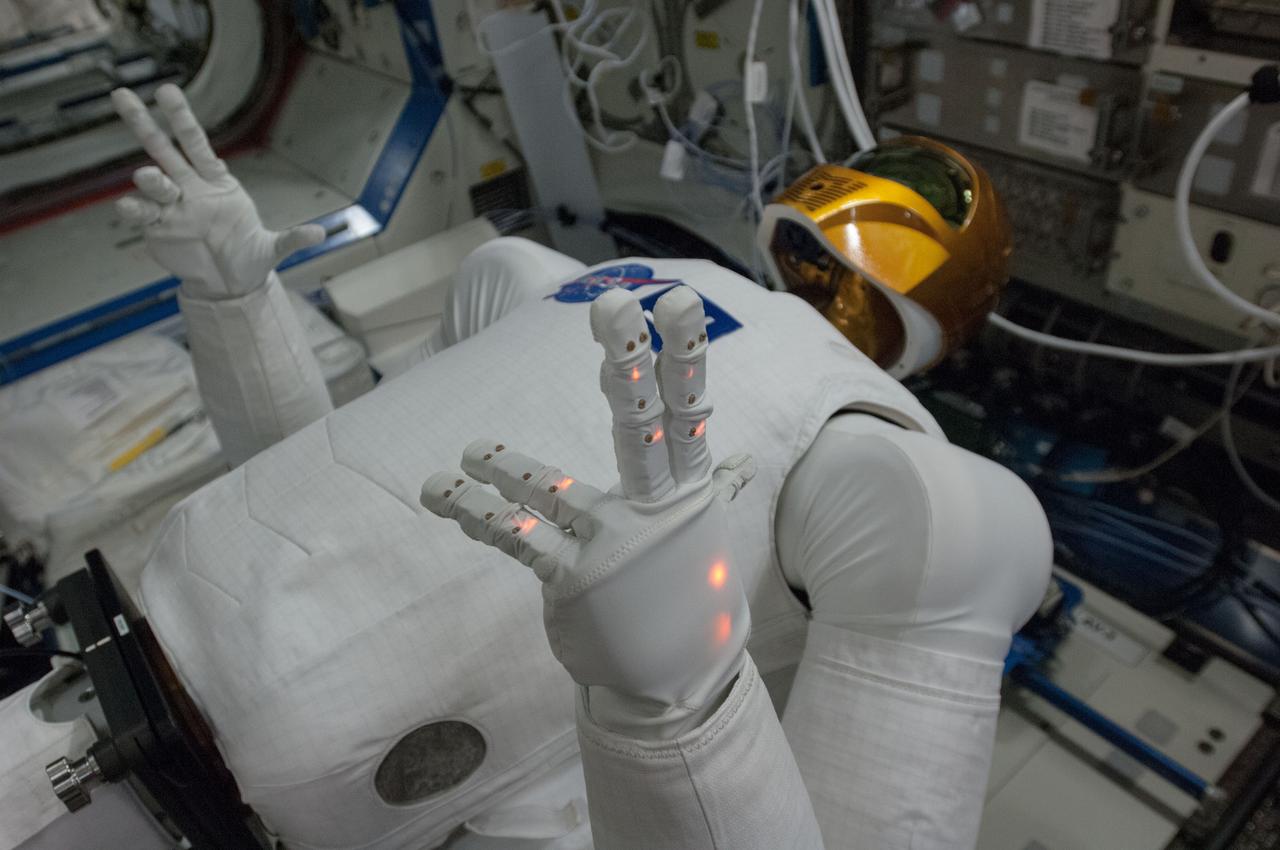
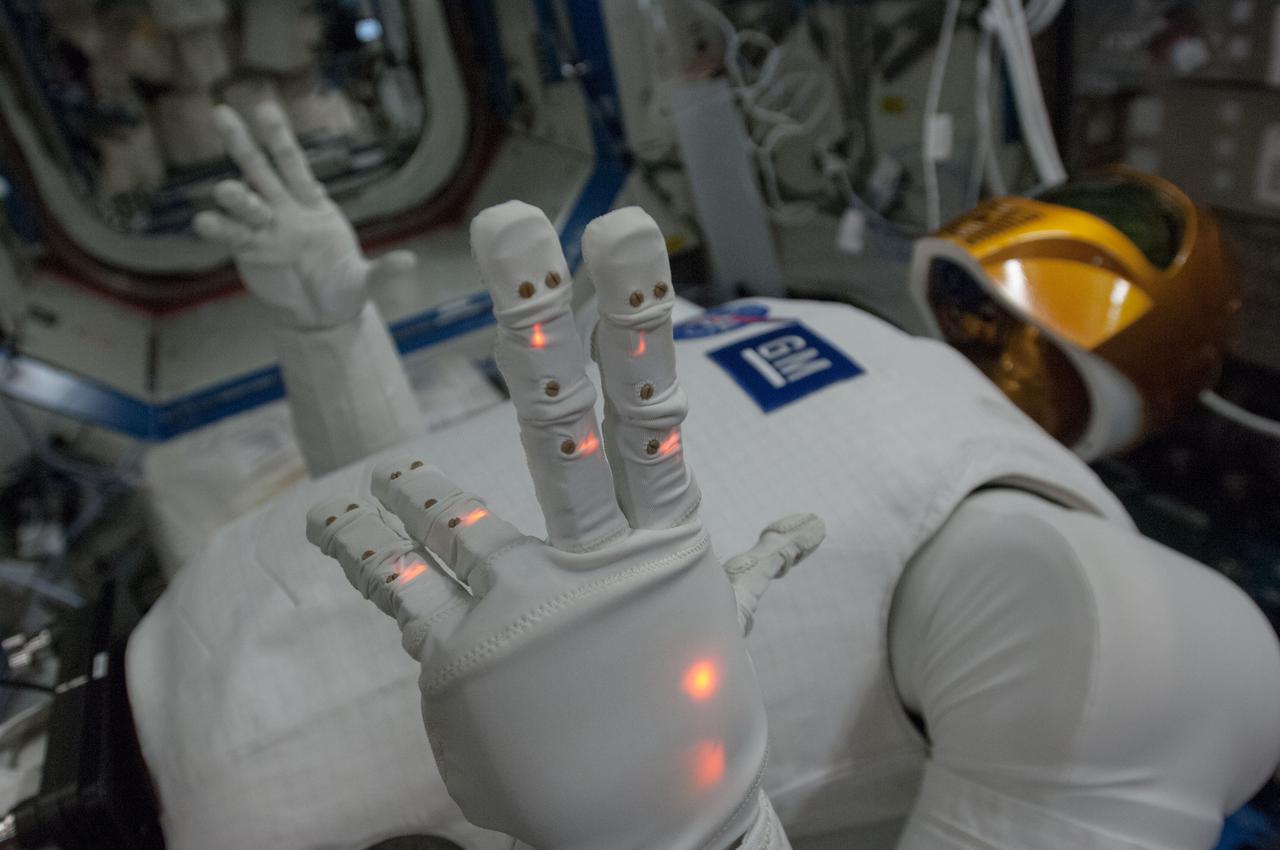
ISS030-E-075367 (14 Feb. 2012) --- A close-up of a hand of Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.

ISS030-E-074077 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, and NASA astronaut Dan Burbank, Expedition 30 commander, are pictured in the Destiny laboratory of the International Space Station during R2?s initial checkouts.

ISS026-E-034328 (15 March 2011) --- Russian cosmonaut Oleg Skripochka, Expedition 26 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS035-E-030779 (25 April 2013) --- R 2, the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011, awaits a direction from NASA astronaut Tom Marshburn (seen in the robot's visor), Expedition 35 Flight Engineer, who was performing the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.

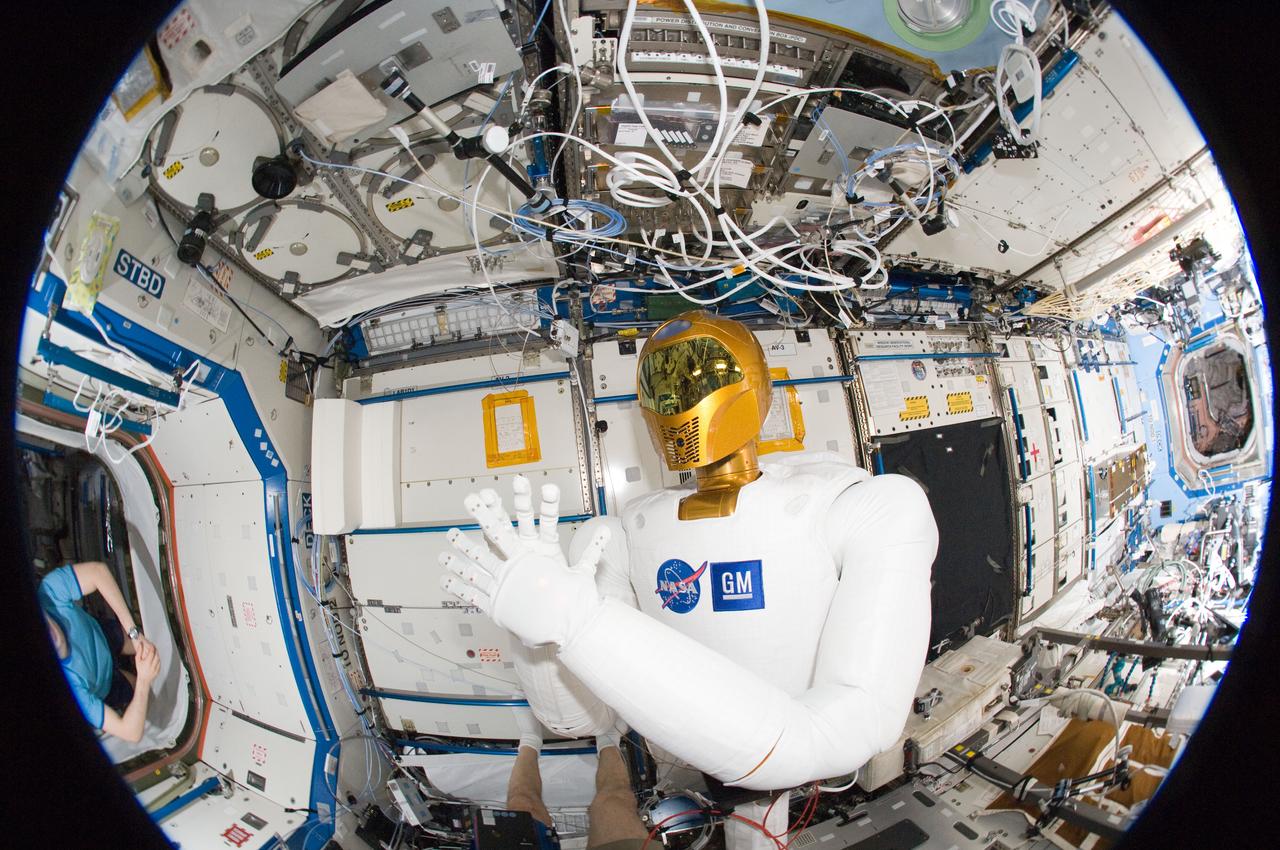
ISS030-E-135157 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135148 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135140 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.
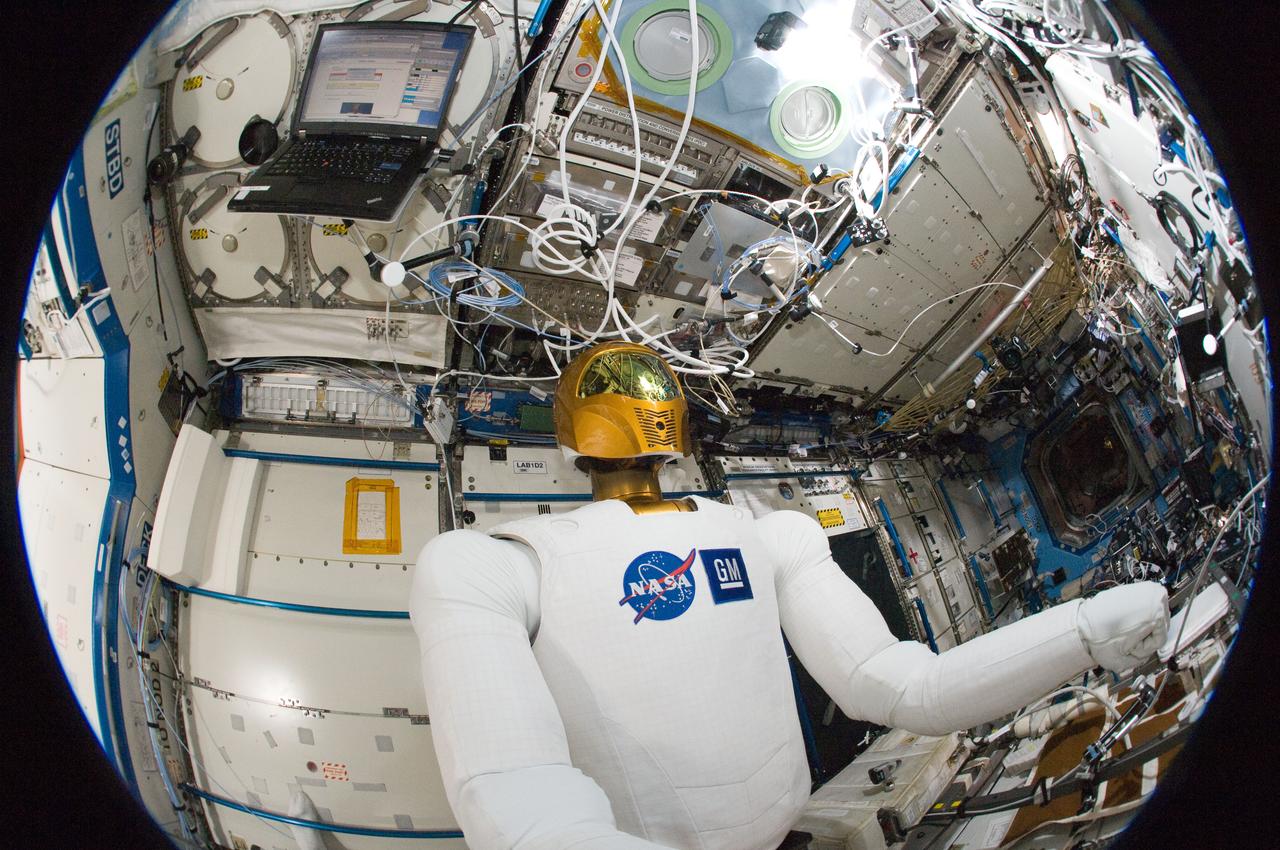
ISS030-E-135135 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135163 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.
ISS030-E-135185 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135187 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS036-E-013170 (28 June 2013) --- NASA astronaut Chris Cassidy, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.

ISS029-E-039234 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039219 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039239 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039197 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039235 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039213 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS036-E-013172 (28 June 2013) --- NASA astronaut Chris Cassidy, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.
ISS029-E-039226 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
ISS029-E-039211 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
ISS029-E-039212 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039218 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
Documentation of Robonaut 2 (R2) in the Destiny U.S. Laboratory during the first use of the Robonaut Tele-operation System. Robonaut is a dexterous humanoid robot designed with the versatility and dexterity to manipulate hardware, work in high risk environments, and respond safely to unexpected obstacles. Image was released by astronaut on Twitter.

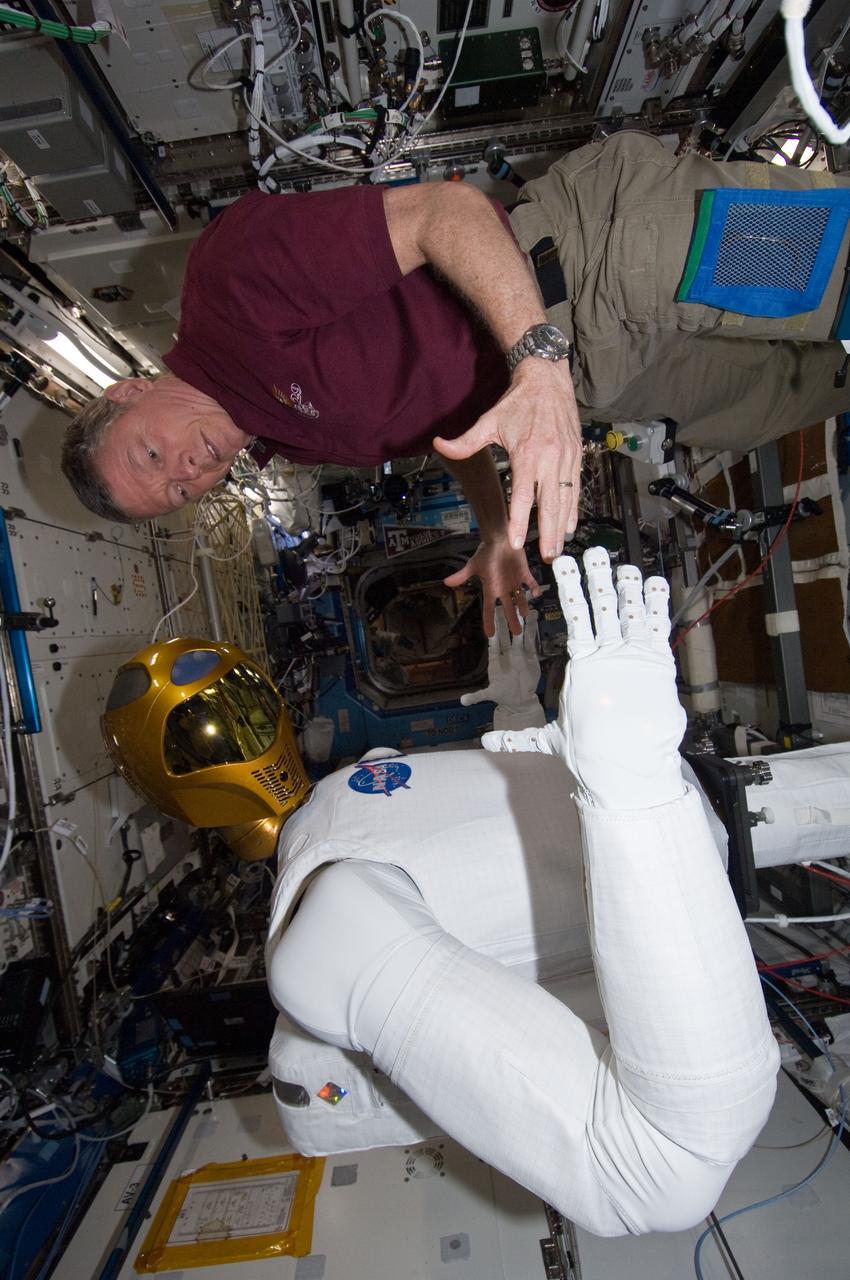
ISS030-E-074063 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, shakes hands with NASA astronaut Dan Burbank, Expedition 30 commander, in the Destiny laboratory of the International Space Station. This event made history with the first human/robotic handshake to be performed in space.

ISS030-E-074065 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, shakes hands with NASA astronaut Dan Burbank, Expedition 30 commander, in the Destiny laboratory of the International Space Station. This event made history with the first human/robotic handshake to be performed in space.

ISS030-E-074062 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured in the Destiny laboratory of the International Space Station while NASA astronaut Dan Burbank, Expedition 30 commander, uses a computer during R2?s initial checkouts.

ISS026-E-034308 (15 March 2011) --- European Space Agency astronaut Paolo Nespoli, Expedition 26/27 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS030-E-074070 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured in the Destiny laboratory of the International Space Station while NASA astronaut Dan Burbank, Expedition 30 commander, uses a computer during R2?s initial checkouts.

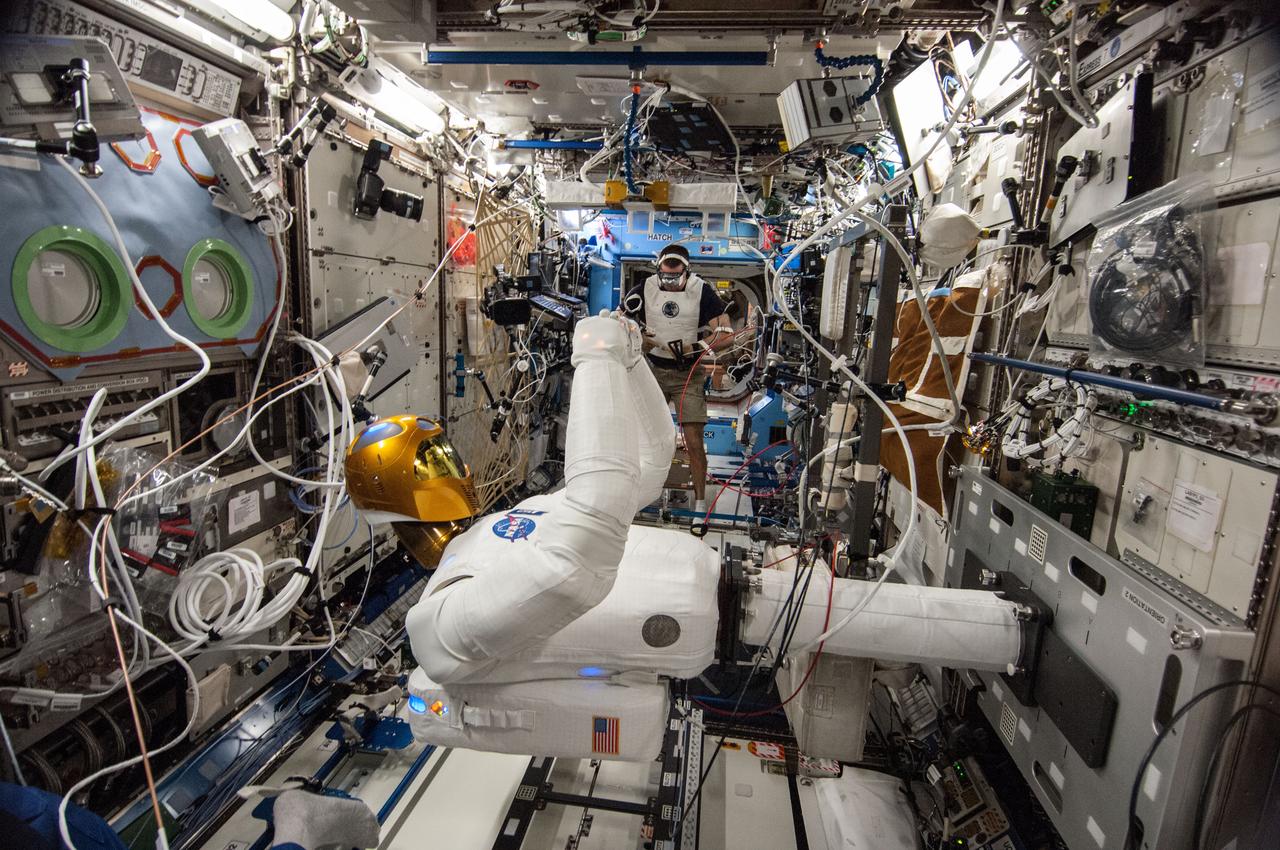
ISS036-E-023752 (21 July 2013) --- In the International Space Station’s Destiny laboratory, NASA astronaut Karen Nyberg, Expedition 36 flight engineer, wears special gear to telerobotically test Robonaut 2’s (out of frame) maneuvers transmitted from both space and the ground.

ISS026-E-034311 (15 March 2011) --- European Space Agency astronaut Paolo Nespoli, Expedition 26/27 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

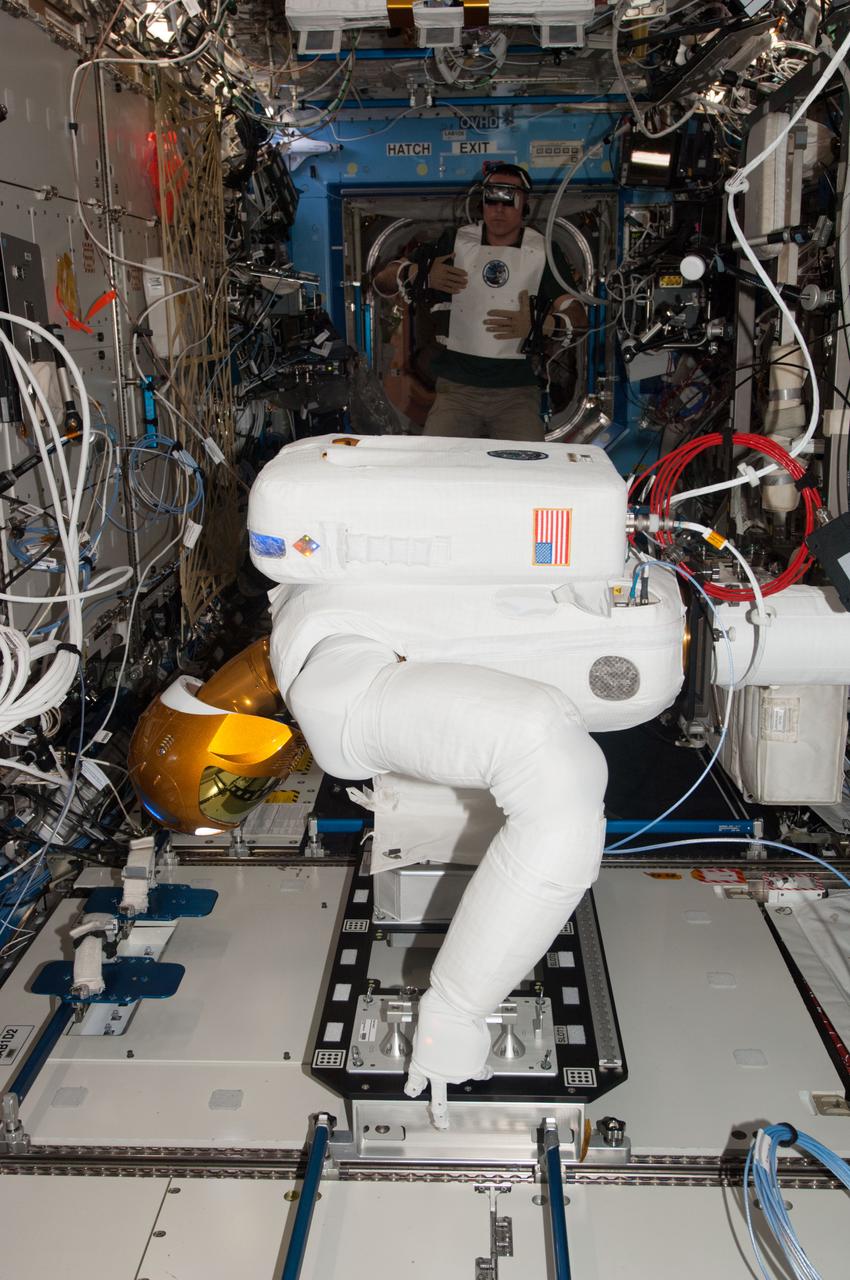
ISS034-E-037352 (31 Jan. 2013) --- Robonaut 2, the first humanoid robot in space, is pictured in this image photographed by an Expedition 34 crew member in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks.

ISS036-E-023759 (21 July 2013) --- In the International Space Station’s Destiny laboratory, NASA astronaut Karen Nyberg, Expedition 36 flight engineer, wears special gear to telerobotically test Robonaut 2’s (background) maneuvers transmitted from both space and the ground.

CAPE CANAVERAL, Fla. -- The enormous Vehicle Assembly Building is seen prominently in the background at NASA's Kennedy Space Center in Florida, overlooking the parking spaces below the Press Site filled with news satellite trucks and media vehicles, there to cover the final launch of space shuttle Discovery on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder
ISS031-E-031704 (1 May 2012) --- Controlled by teams on the ground, Robonaut 2 humanoid robot uses a task board during an arm and finger motions check out in the Destiny laboratory of the International Space Station.

ISS032-E-022952 (22 Aug. 2012) --- NASA astronaut Sunita Williams, Expedition 32 flight engineer, works with Robonaut 2 humanoid robot in the Destiny laboratory of the International Space Station.

ISS030-E-075409 (15 Feb. 2012) --- Russian cosmonaut Oleg Kononenko, Expedition 30 flight engineer, and Robonaut 2 are pictured in the Destiny laboratory of the International Space Station.
ISS035-E-030791 (25 April 2013) --- NASA astronaut Tom Marshburn (pictured in background), Expedition 35 Flight Engineer, performs the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. R 2 is the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.

ISS035-E-030794 (25 April 2013) --- NASA astronaut Tom Marshburn (pictured in background), Expedition 35 Flight Engineer, performs the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. R 2 is the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.
ISS035-E-030794 (25 April 2013) --- NASA astronaut Tom Marshburn (pictured in background), Expedition 35 Flight Engineer, performs the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. R 2 is the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.

ISS034-E-031124 (17 Jan. 2013) --- In the International Space Station's Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.

ISS034-E-031125 (17 Jan. 2013) --- In the International Space Station's Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.
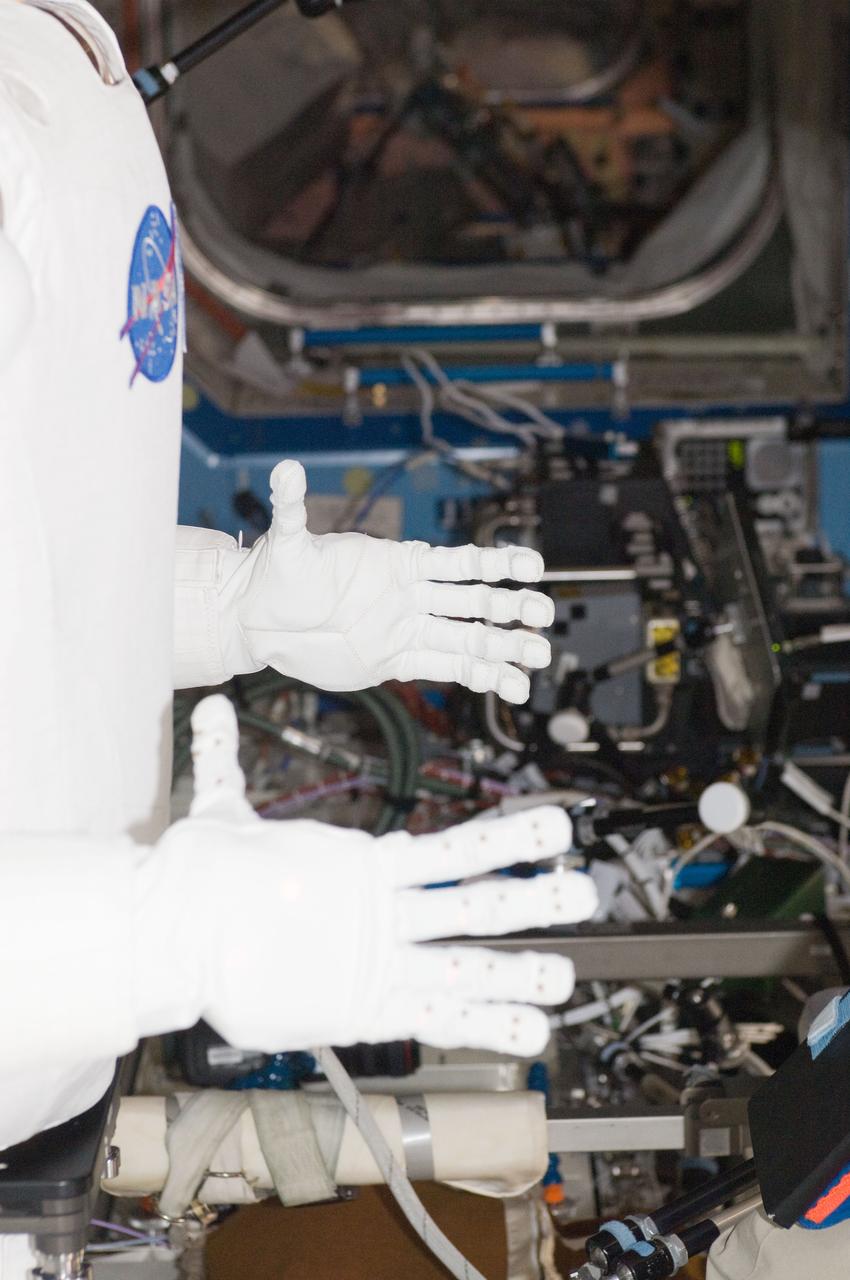
ISS030-E-075419 (15 Feb. 2012) --- The hands of Robonaut 2, nicknamed R2, are pictured during initial checkouts in the Destiny laboratory of the International Space Station.

JSC2011-E-017946 (February 2011) --- Robonaut 2 poses atop its new wheeled base, Centaur 2, at the Johnson Space Center Planetary Analog Test Site. The Centaur base builds off of lessons learned through the Space Exploration Vehicle, a rover for astronauts, and could allow the dexterous humanoid robot to help with the future exploration of distant planetary surfaces. Photo credit: NASA or National Aeronautics and Space Administration

JSC2011-E-017945 (February 2011) --- Robonaut 2 poses atop its new wheeled base, Centaur 2, at the Johnson Space Center Planetary Analog Test Site. The Centaur base builds off of lessons learned through the Space Exploration Vehicle, a rover for astronauts, and could allow the dexterous humanoid robot to help with the future exploration of distant planetary surfaces. Photo credit: NASA or National Aeronautics and Space Administration

JSC2011-E-017947 (February 2011) --- Robonaut 2 poses atop its new wheeled base, Centaur 2, at the Johnson Space Center Planetary Analog Test Site. The Centaur base builds off of lessons learned through the Space Exploration Vehicle, a rover for astronauts, and could allow the dexterous humanoid robot to help with the future exploration of distant planetary surfaces. Photo credit: NASA or National Aeronautics and Space Administration

ISS034-E-039162 (1 Feb. 2013) --- Robonaut 2, the first humanoid robot in space, is pictured in this image photographed by an Expedition 34 crew member in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks after a recent software upgrade.

ISS034-E-031599 (18 Jan. 2013) --- Robonaut 2 is featured in this close-up image in the International Space Station?s Destiny laboratory. NASA astronaut Kevin Ford (visible in the reflections of R2?s helmet visor), Expedition 34 commander, powered up R2 so ground controllers could verify the humanoid robot?s configuration for upcoming activities.

ISS034-E-039157 (1 Feb. 2013) --- Robonaut 2, the first humanoid robot in space, is pictured in this image photographed by an Expedition 34 crew member in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks after a recent software upgrade.

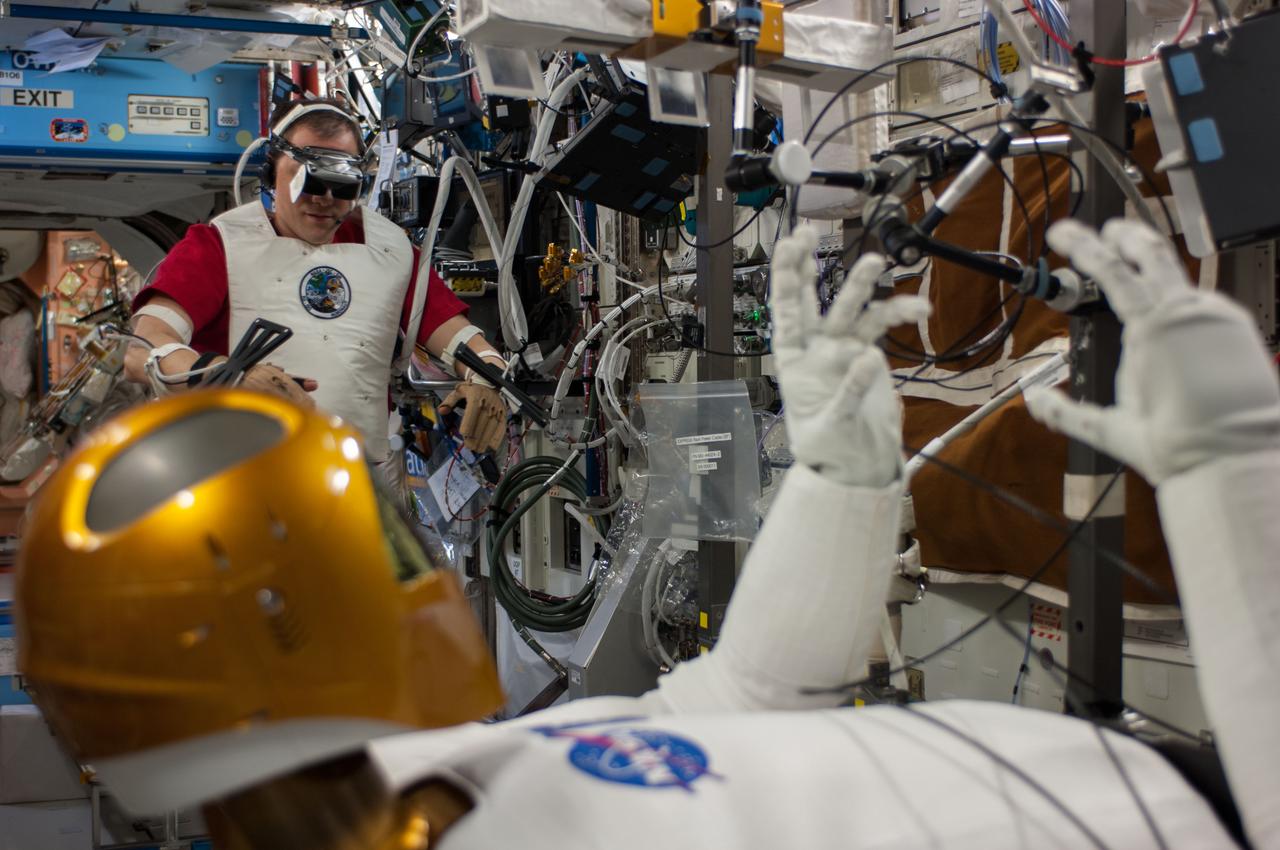
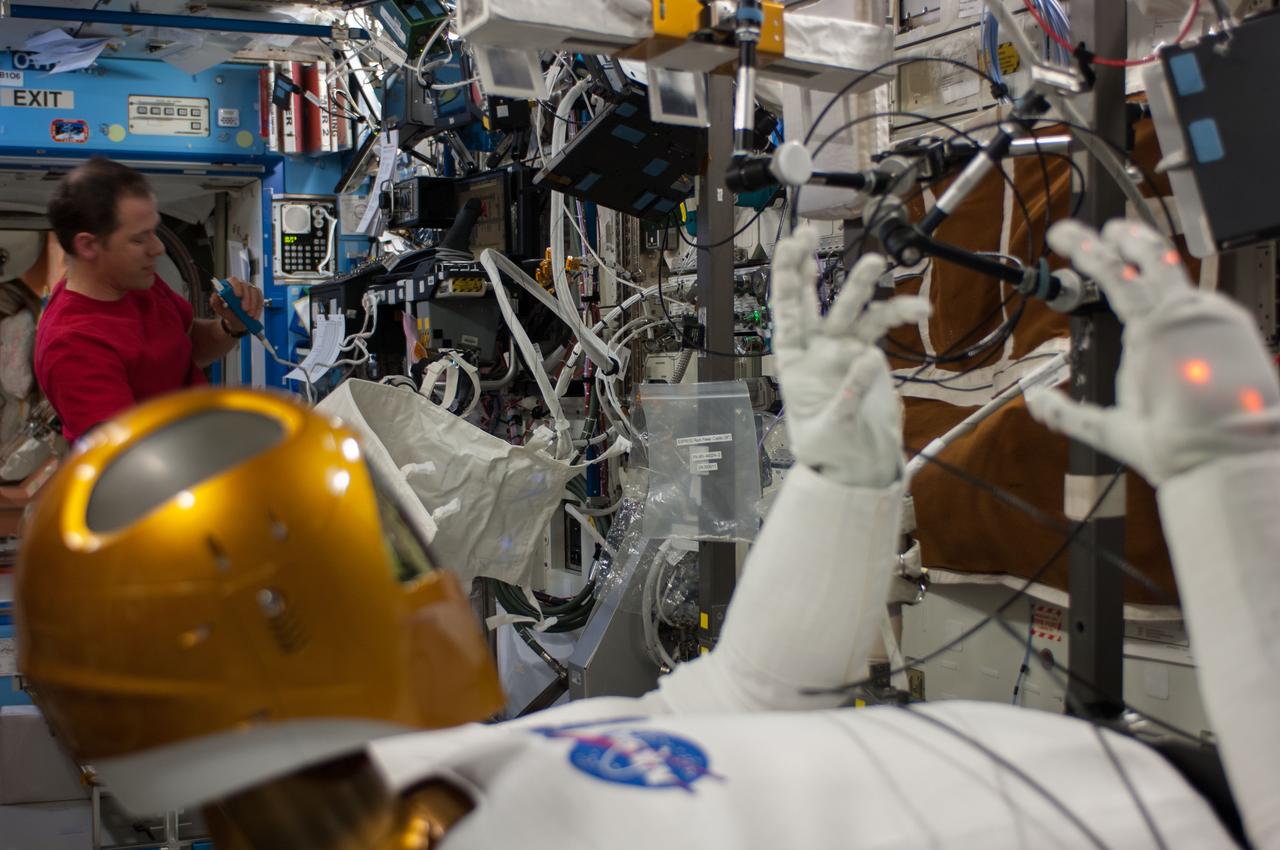
ISS036-E-029144 (6 Aug. 2013) --- In the International Space Station?s Destiny laboratory, NASA astronaut Chris Cassidy, Expedition 36 flight engineer, wears tele-operation gear consisting of a vest, gloves and visor to telerobotically test Robonaut 2?s maneuvers. Cassidy was able to manipulate R2?s head, neck, arms and fingers telerobotically through his own movements as well as through verbal commands.
ISS036-E-029140 (6 Aug. 2013) --- In the International Space Station?s Destiny laboratory, NASA astronaut Chris Cassidy, Expedition 36 flight engineer, wears tele-operation gear consisting of a vest, gloves and visor to telerobotically test Robonaut 2?s maneuvers. Cassidy was able to manipulate R2?s head, neck, arms and fingers telerobotically through his own movements as well as through verbal commands.
ISS030-E-074059 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured in the Destiny laboratory of the International Space Station while NASA astronaut Dan Burbank (mostly out of frame at left) uses a computer during R2?s initial checkouts. R2 later went on to make history with the first human/robotic handshake to be performed in space.
ISS036-E-038293 (28 Aug. 2013) --- In the International Space Station's Destiny laboratory, NASA astronaut Chris Cassidy, Expedition 36 flight engineer, wears tele-operation gear consisting of a vest, gloves and visor to telerobotically test Robonaut 2's maneuvers. Cassidy was able to manipulate R2's head, neck, arms and fingers telerobotically through his own movements as well as through verbal commands.

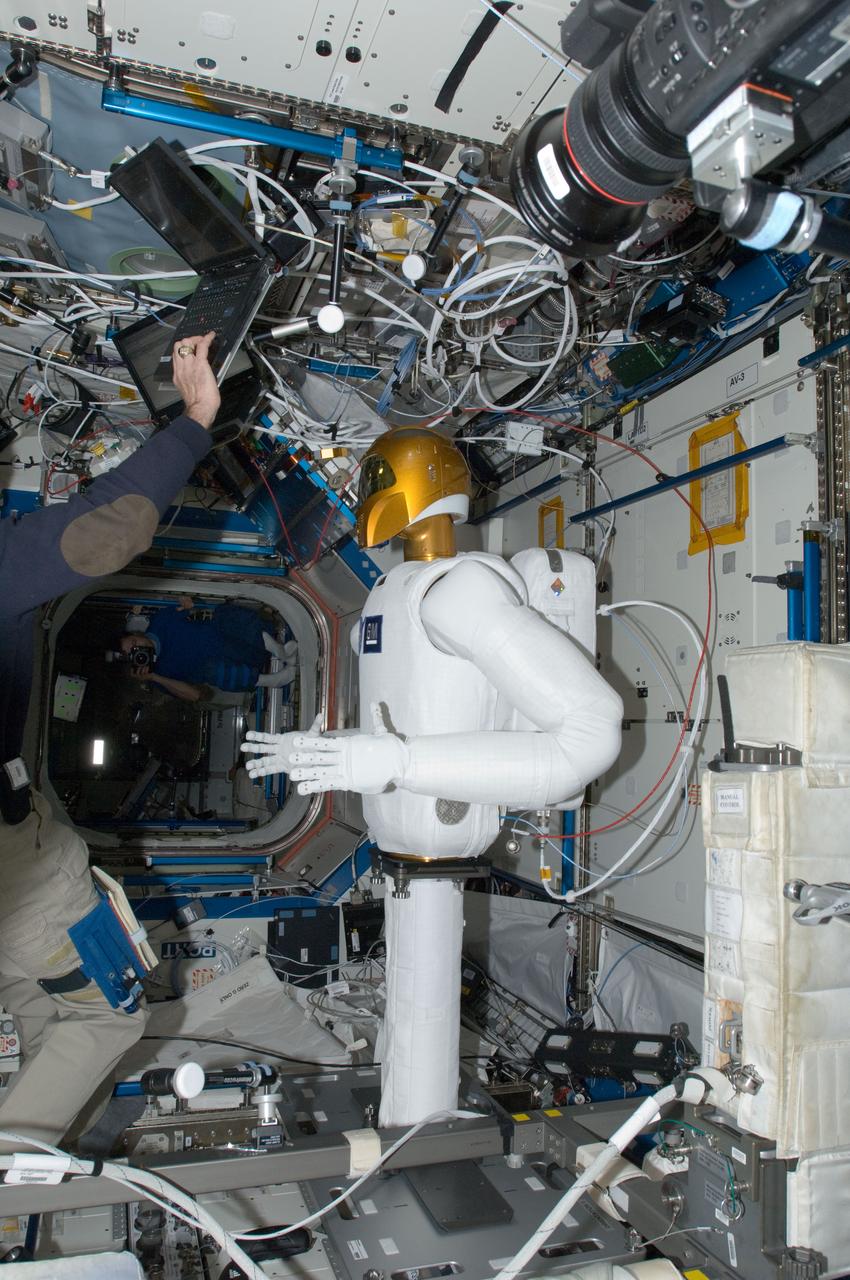
ISS036-E-012571 (27 June 2013) --- European Space Agency astronaut Luca Parmitano, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.

ISS036-E-012573 (27 June 2013) --- European Space Agency astronaut Luca Parmitano, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.

ISS034-E-039159 (1 Feb. 2013) --- Robonaut 2, the first humanoid robot in space, is pictured in this image photographed by an Expedition 34 crew member in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks after a recent software upgrade.

ISS030-E-075362 (14 Feb. 2012) --- NASA astronaut Dan Burbank, Expedition 30 commander, uses a communication system while working with Robonaut 2 in the Destiny laboratory of the International Space Station.

ISS026-E-034292 (15 March 2011) --- NASA astronaut Scott Kelly, Expedition 26 commander, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS030-E-075393 (14 Feb. 2012) --- The hands of Robonaut 2, nicknamed R2, are pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.

ISS030-E-075357 (14 Feb. 2012) --- Russian cosmonaut Anton Shkaplerov, Expedition 30 flight engineer, and Robonaut 2 are pictured in the Destiny laboratory of the International Space Station.

ISS032-E-022938 (22 Aug. 2012) --- NASA astronauts Sunita Williams and Joe Acaba, both Expedition 32 flight engineers, pose for a photo with Robonaut 2 humanoid robot in the Destiny laboratory of the International Space Station.

ISS030-E-075364 (14 Feb. 2012) --- NASA astronaut Dan Burbank, Expedition 30 commander, uses a computer while working with Robonaut 2 (out of frame) in the Destiny laboratory of the International Space Station.

ISS026-E-034323 (15 March 2011) --- NASA astronaut Cady Coleman, Expedition 26/27 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS034-E-037345 (31 Jan. 2013) --- Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works with Robonaut 2, the first humanoid robot in space, in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks.

ISS034-E-037346 (31 Jan. 2013) --- Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works with Robonaut 2, the first humanoid robot in space, in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks.

ISS026-E-034288 (15 March 2011) --- NASA astronaut Cady Coleman, Expedition 26/27 flight engineer, opens the container that holds Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.
ISS035-E-017869 (10 April 2013) --- Robonaut 2, the first humanoid robot to travel to space and the first U.S.-built robot to visit the space station, performs a few finger motion and sensor checkouts aboard the Earth-orbiting outpost.

ISS034-E-037342 (31 Jan. 2013) --- Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works with Robonaut 2 hardware in the Destiny laboratory of the International Space Station. R2’s arms are visible at bottom.

ISS026-E-034291 (15 March 2011) --- European Space Agency astronaut Paolo Nespoli, Expedition 26/27 flight engineer, opens the container that holds Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.