
Martian Soil Ready for Robotic Laboratory Analysis

Robotics Laboratory: robot arm

Robotics Laboratory: Helmet, glove & viewing screen
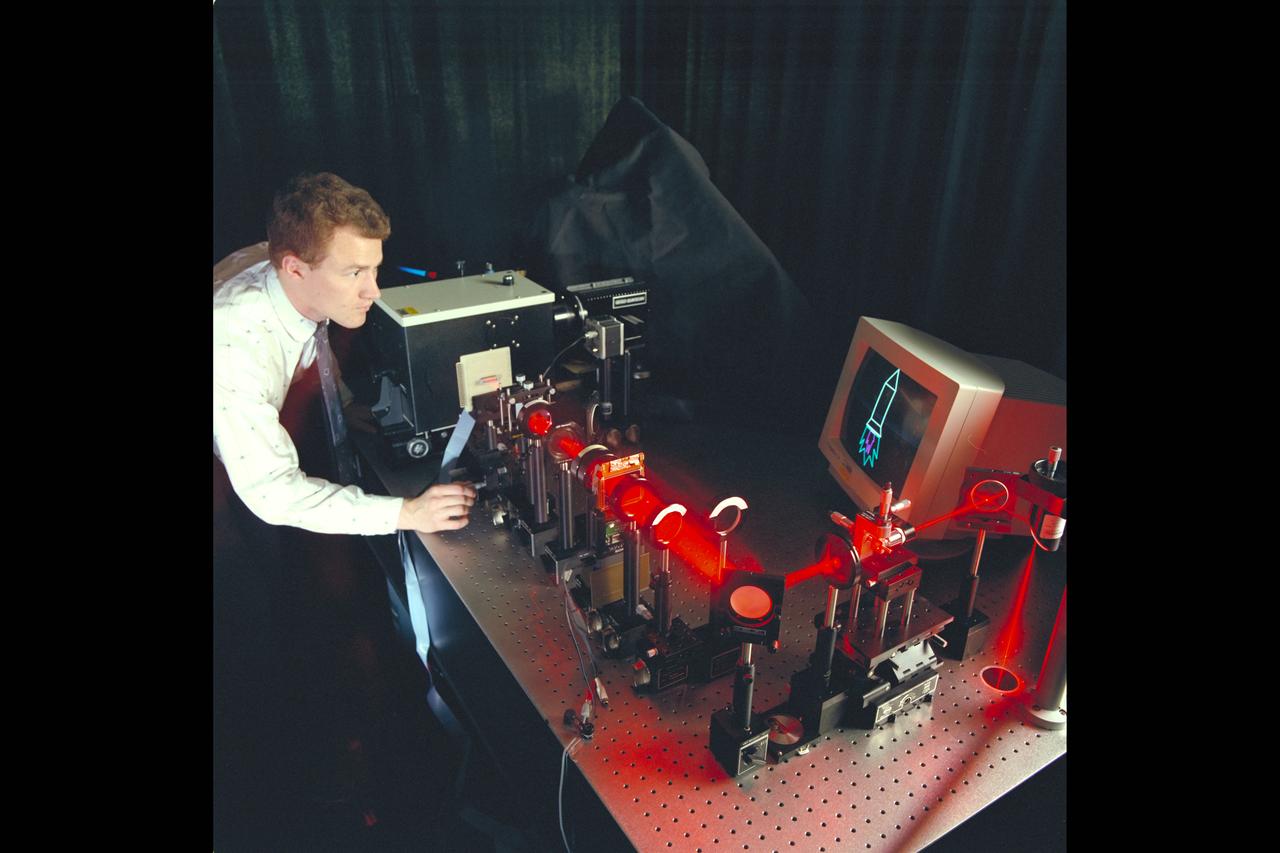
Robotics Laboratory: Spectrometer w/Charles Gray

S119-E-006748 (20 March 2009) --- Astronauts Lee Archambault, (foreground), STS-119 commander, John Phillips and Sandra Magnus, both mission specialists, are pictured at the robotic workstation in Destiny or the U.S. laboratory. Magnus is winding down a lengthy tour in space aboard the orbiting outpost, and she will return to Earth with the Discovery crew.

Robotics researchers at NASA Jet Propulsion Laboratory in Pasadena, California, stand with robots RoboSimian and Surrogate, both built at JPL.

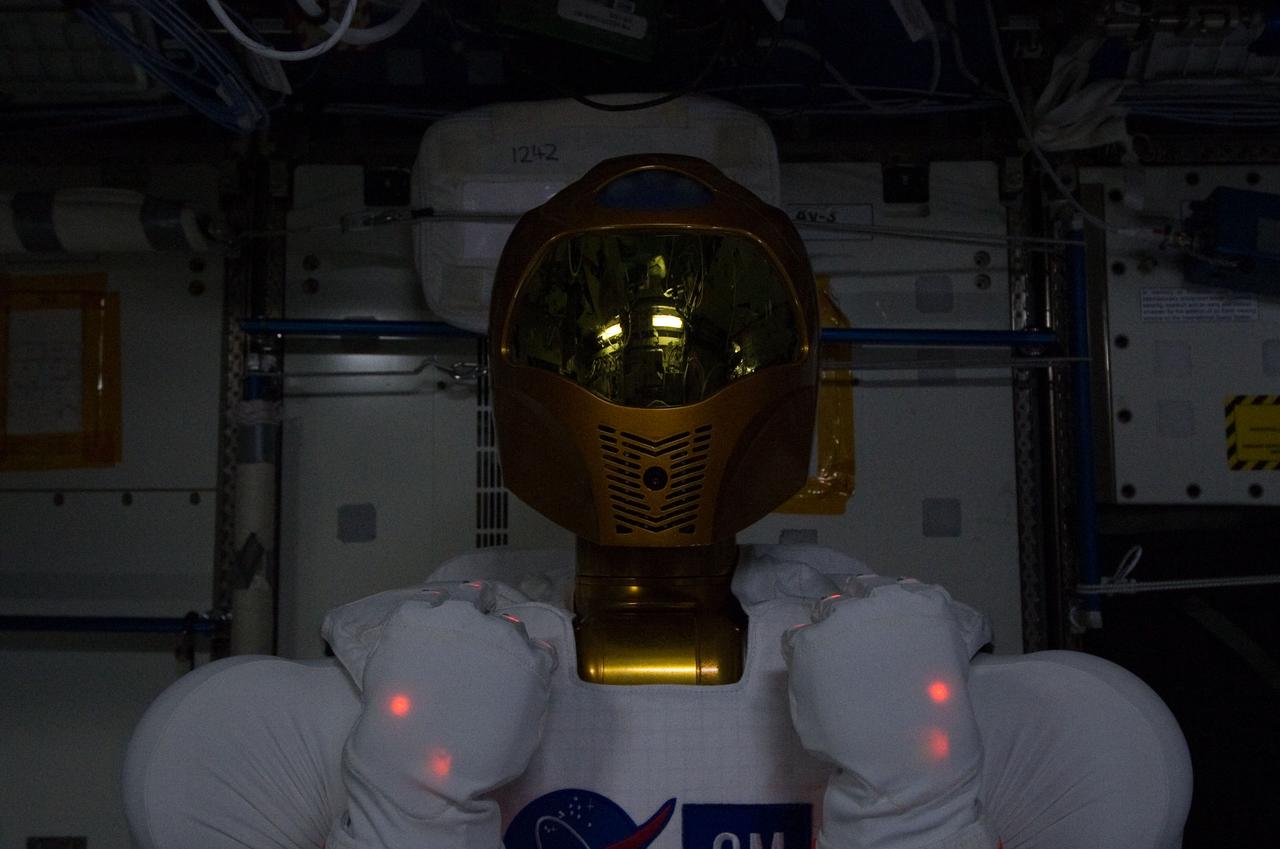
ISS030-E-142875 (14 March 2012) --- Controlled by teams on the ground, Robonaut 2 humanoid robot holds an instrument to measure air velocity during another system check out in the Destiny laboratory of the International Space Station.

ISS034-E-007386 (10 Dec. 2012) --- NASA astronaut Kevin Ford, Expedition 34 commander, works with Robonaut 2 humanoid robot in the Destiny laboratory of the International Space Station.

ISS030-E-142876 (14 March 2012) --- Controlled by teams on the ground, Robonaut 2 humanoid robot holds an instrument to measure air velocity during another system check out in the Destiny laboratory of the International Space Station.

ISS018-E-010564 (5 Dec. 2008) --- Astronaut Michael Fincke, Expedition 18 commander, uses a computer at the robotics work station in the Destiny laboratory of the International Space Station. Using the station's robotic arm, Fincke and astronaut Sandra Magnus (out of frame), flight engineer, relocated the ESP-3 from the Mobile Base System back to the Cargo Carrier Attachment System on the P3 truss. The ESP-3 spare parts platform was temporarily parked on the MBS to clear the path for the spacewalks during STS-126.
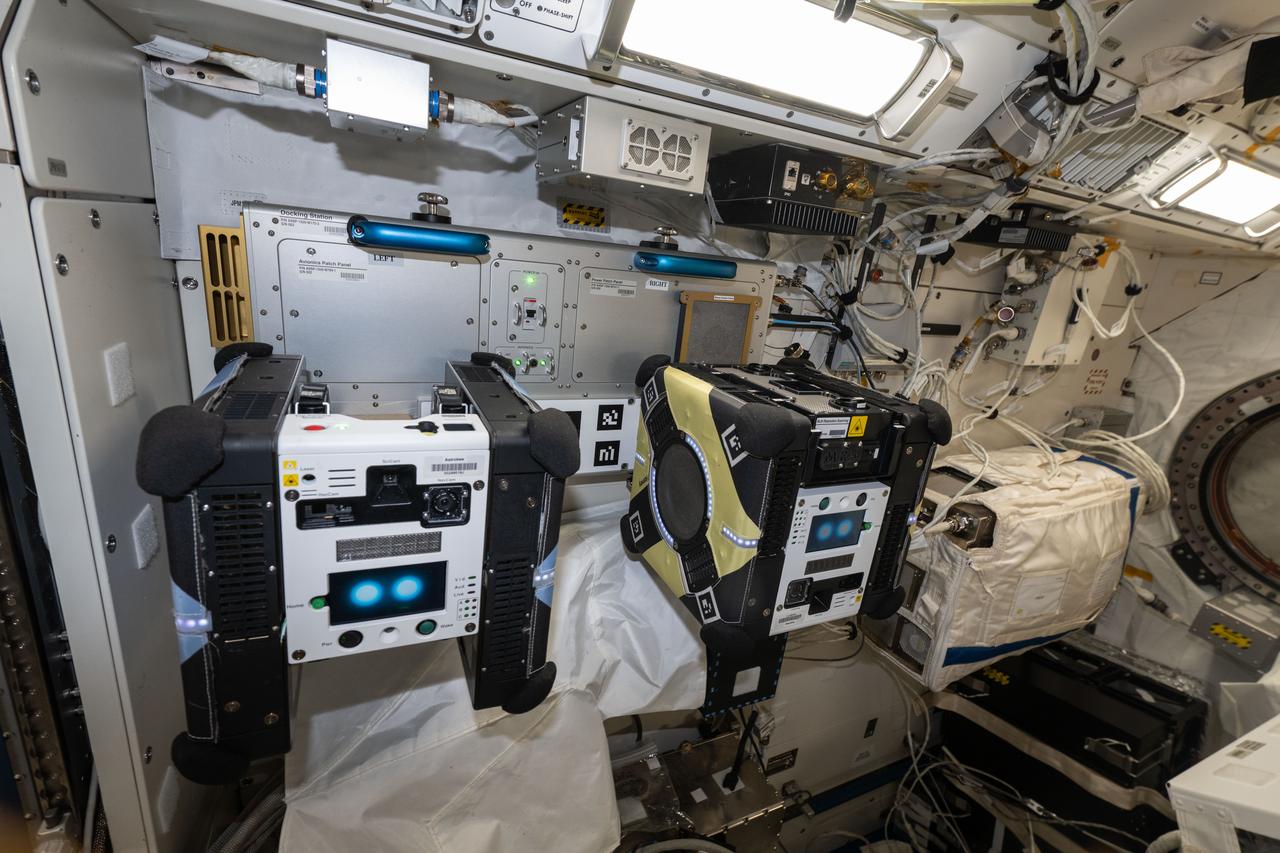
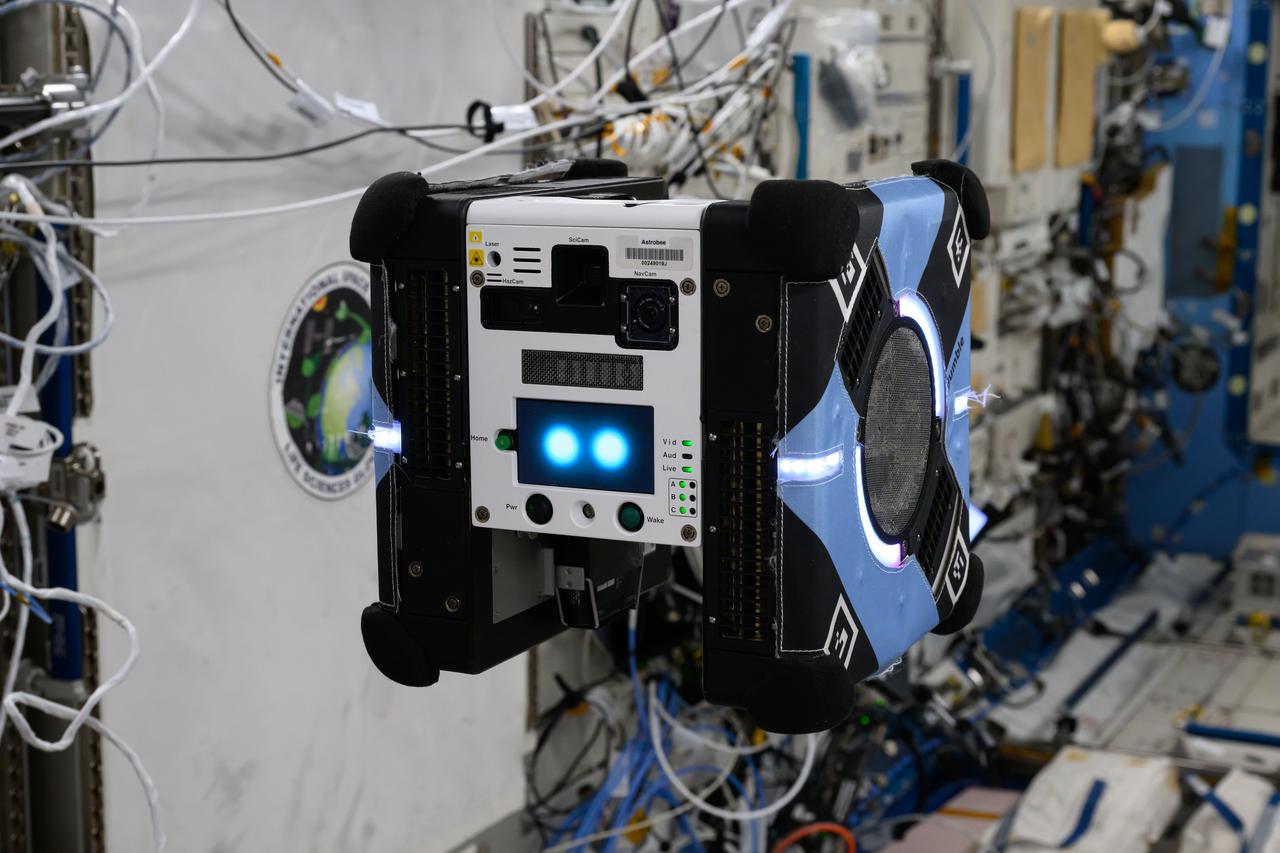
iss073e0098590 (May 26, 2025) --- A pair of Astrobee robotic free-flyers are pictured docked to ports inside the International Space Station's Kibo laboratory module. The cube-shaped, toaster-sized robots are being tested for their ability to autonomously navigate aboard the orbital outpost and conduct routine maintenance and monitoring duties enabling the crew to focus on science and engineering duties.

Jim Rothrock, left, and Carrie Johnson, right, of the Wunderkammer Laboratory team pose for a picture with their robot after attempting the level one competition during the 2014 NASA Centennial Challenges Sample Return Robot Challenge, Wednesday, June 11, 2014, at the Worcester Polytechnic Institute (WPI) in Worcester, Mass. Eighteen teams are competing for a $1.5 million NASA prize purse. Teams will be required to demonstrate autonomous robots that can locate and collect samples from a wide and varied terrain, operating without human control. The objective of this NASA-WPI Centennial Challenge is to encourage innovations in autonomous navigation and robotics technologies. Innovations stemming from the challenge may improve NASA's capability to explore a variety of destinations in space, as well as enhance the nation's robotic technology for use in industries and applications on Earth. Photo Credit: (NASA/Joel Kowsky)
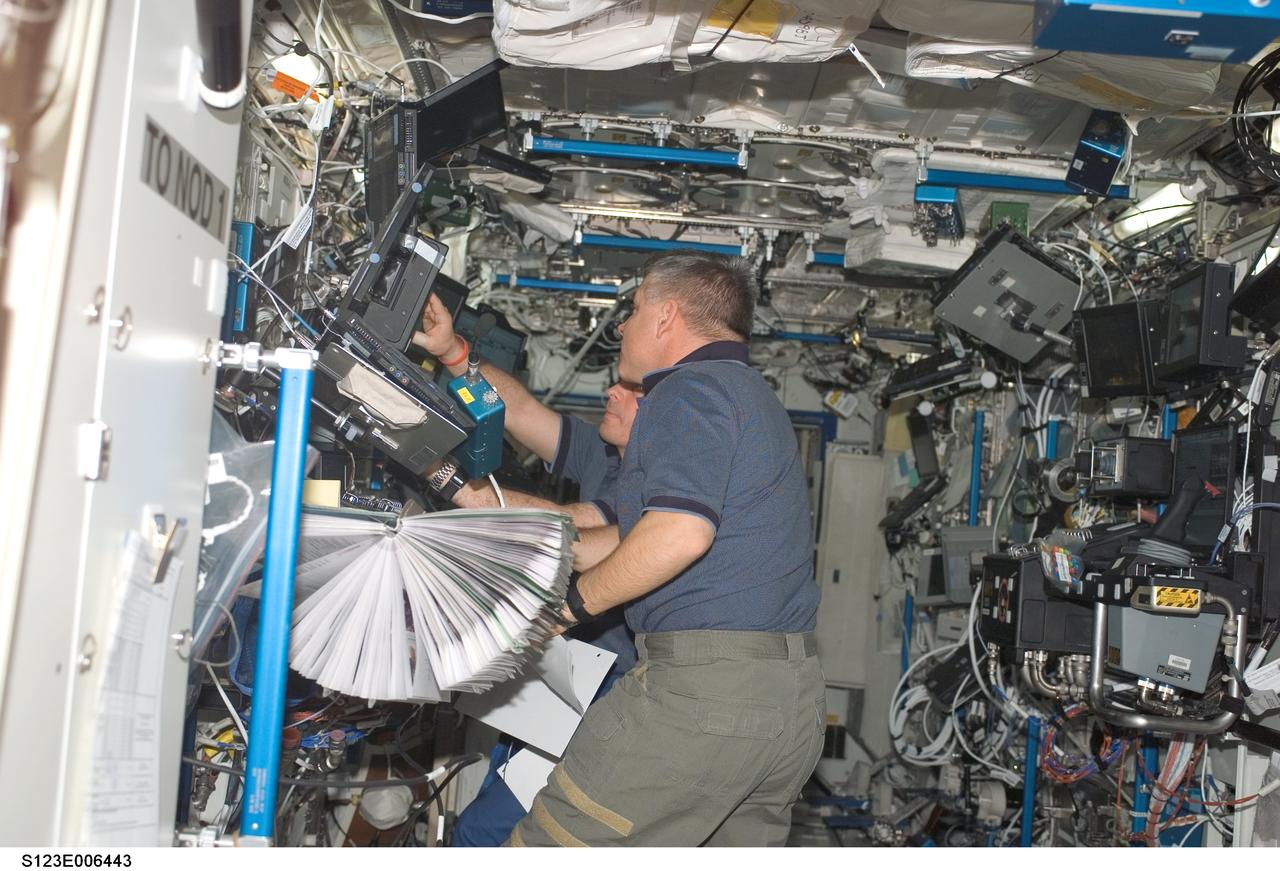
S123-E-006443 (16 March 2008) --- Astronauts Gregory H. Johnson, STS-123 pilot; and Garrett Reisman (partially obscured), Expedition 16 flight engineer, work the controls of the space station's robotic Canadarm2 in the Destiny laboratory of the International Space Station while Space Shuttle Endeavour is docked with the station.

RoboSimian, a limbed robot developed by engineers at NASA Jet Propulsion Laboratory in Pasadena, California, competed in the DARPA Robotics Challenge Trials in Florida in December 2013.

RoboSimian, a limbed robot developed by engineers at NASA Jet Propulsion Laboratory in Pasadena, California, competed in the DARPA Robotics Challenge DRC Trials in Florida in December 2013.

Engineers from NASA Jet Propulsion Laboratory carry RoboSimian, a robot developed at JPL, at the DARPA Robotics Challenge Trials in Florida in December 2013.
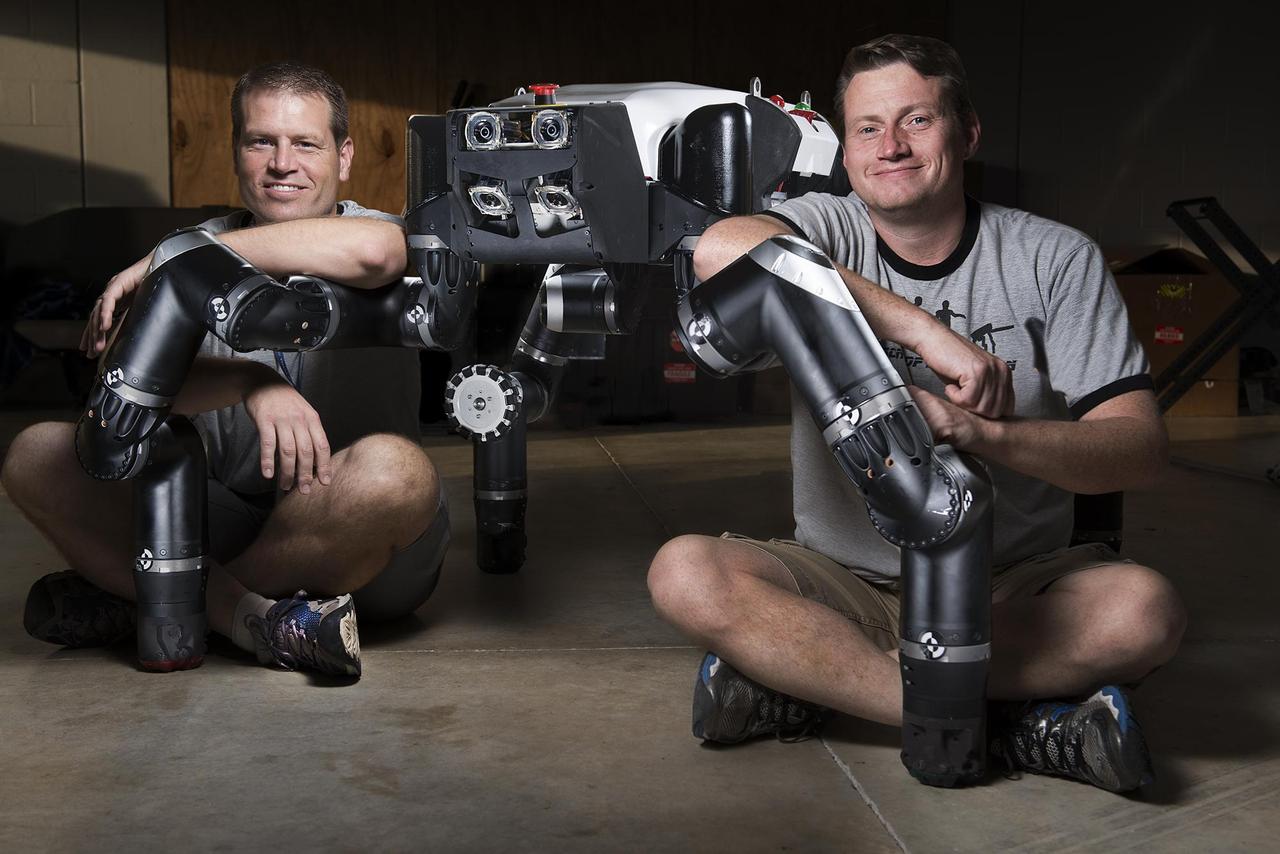
Limbed robot RoboSimian was developed at NASA Jet Propulsion Laboratory, seen here with Brett Kennedy, supervisor of the JPL Robotic Vehicles and Manipulators Group, and Chuck Bergh, a senior engineer in JPL Robotic Hardware Systems Group.

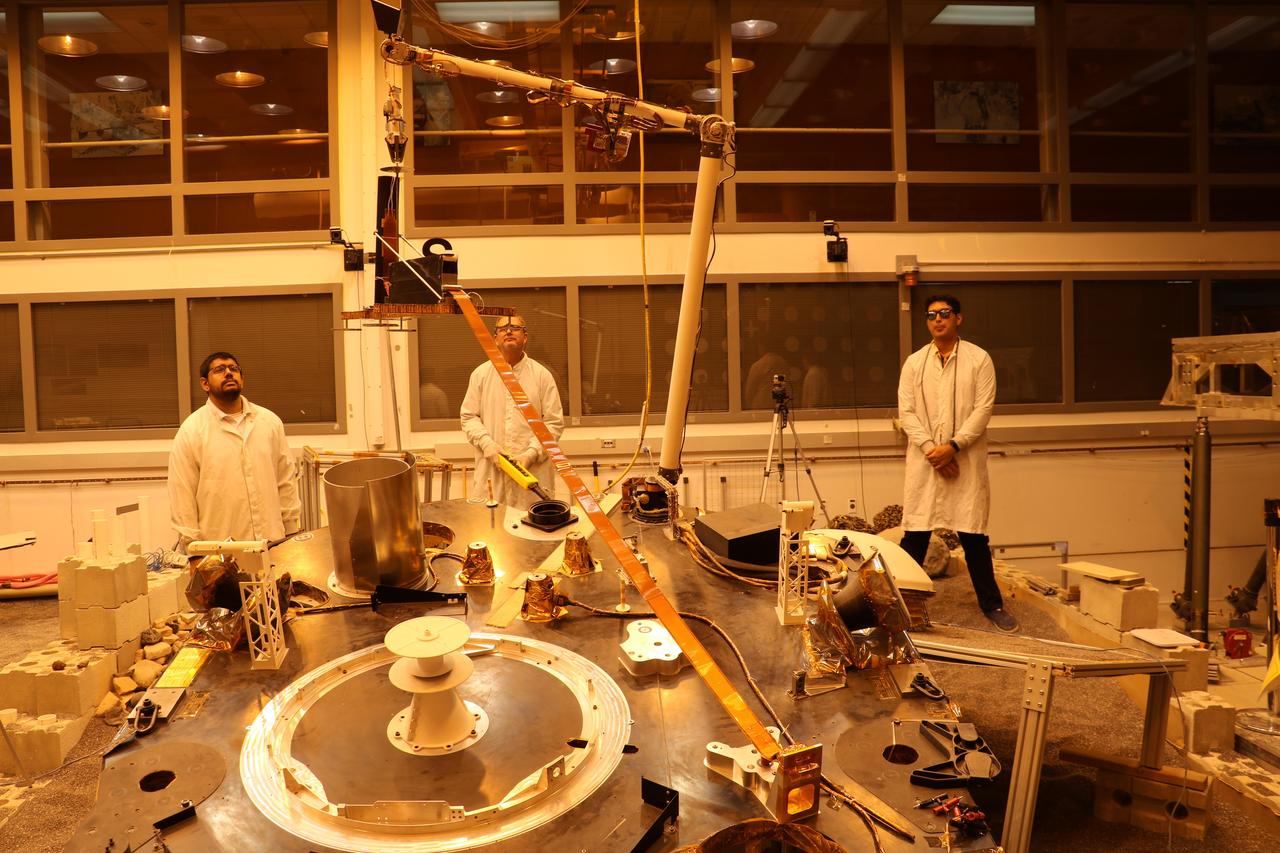
In the middle of this image taken at the Jet Propulsion Laboratory, the long robotic arm of NASA Mars Science Laboratory is bent at nearly a 90-degree angle.

Engineers from NASA Jet Propulsion Laboratory and Alliance Spacesystems are testing the range of motion of the Mars Science Laboratory rover’s robotic arm joints.

This photograph shows RoboSimian, a disaster-relief and -mitigation robot, under construction in a lab at NASA Jet Propulsion Laboratory, Pasadena, Calif.
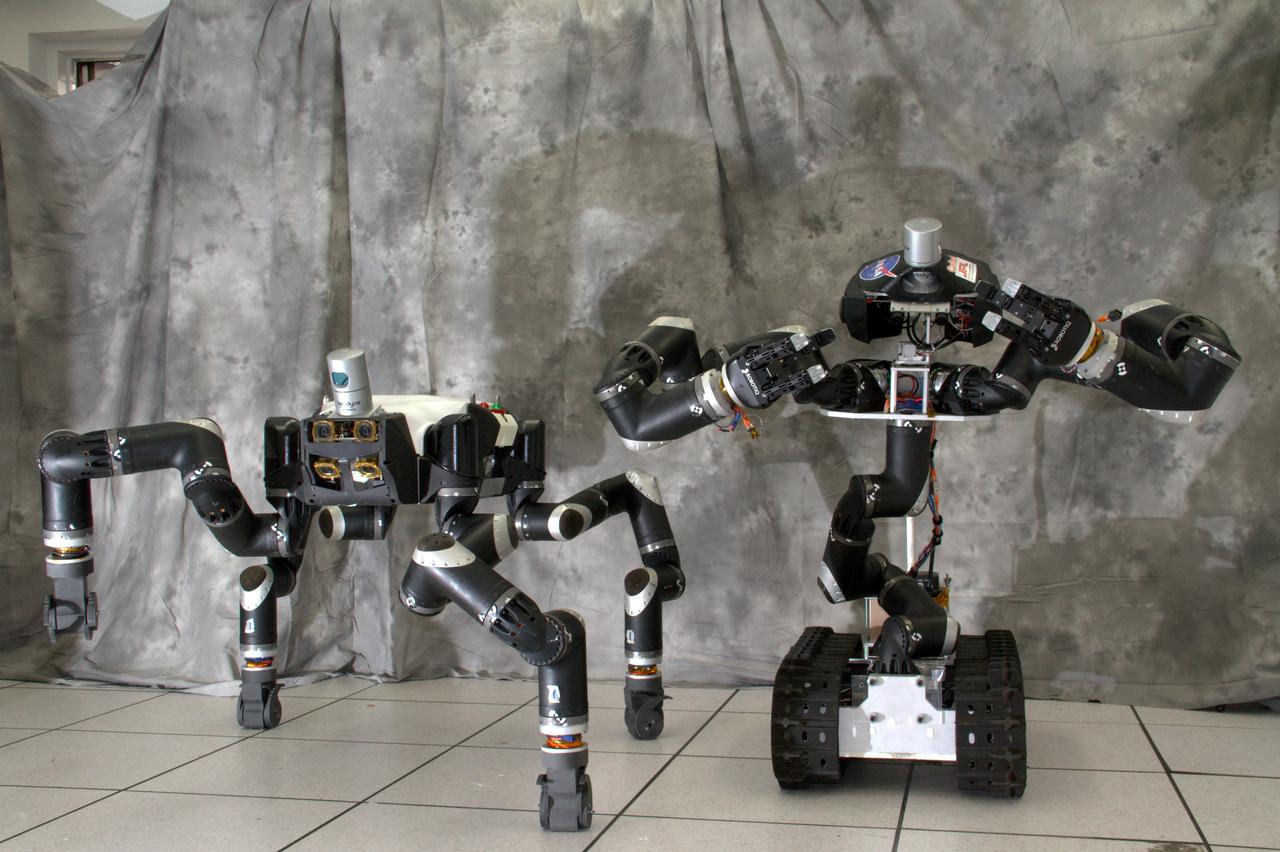
RoboSimian and Surrogate are robots that were designed and built at NASA Jet Propulsion Laboratory in Pasadena, California.

Surrogate, nicknamed Surge, is a robot designed and built at NASA Jet Propulsion Laboratory in Pasadena, California.
Footage taken at the JPL In-Situ Instruments Laboratory, or testbed, shows engineers practicing the deployment of the test rover robotic arm.
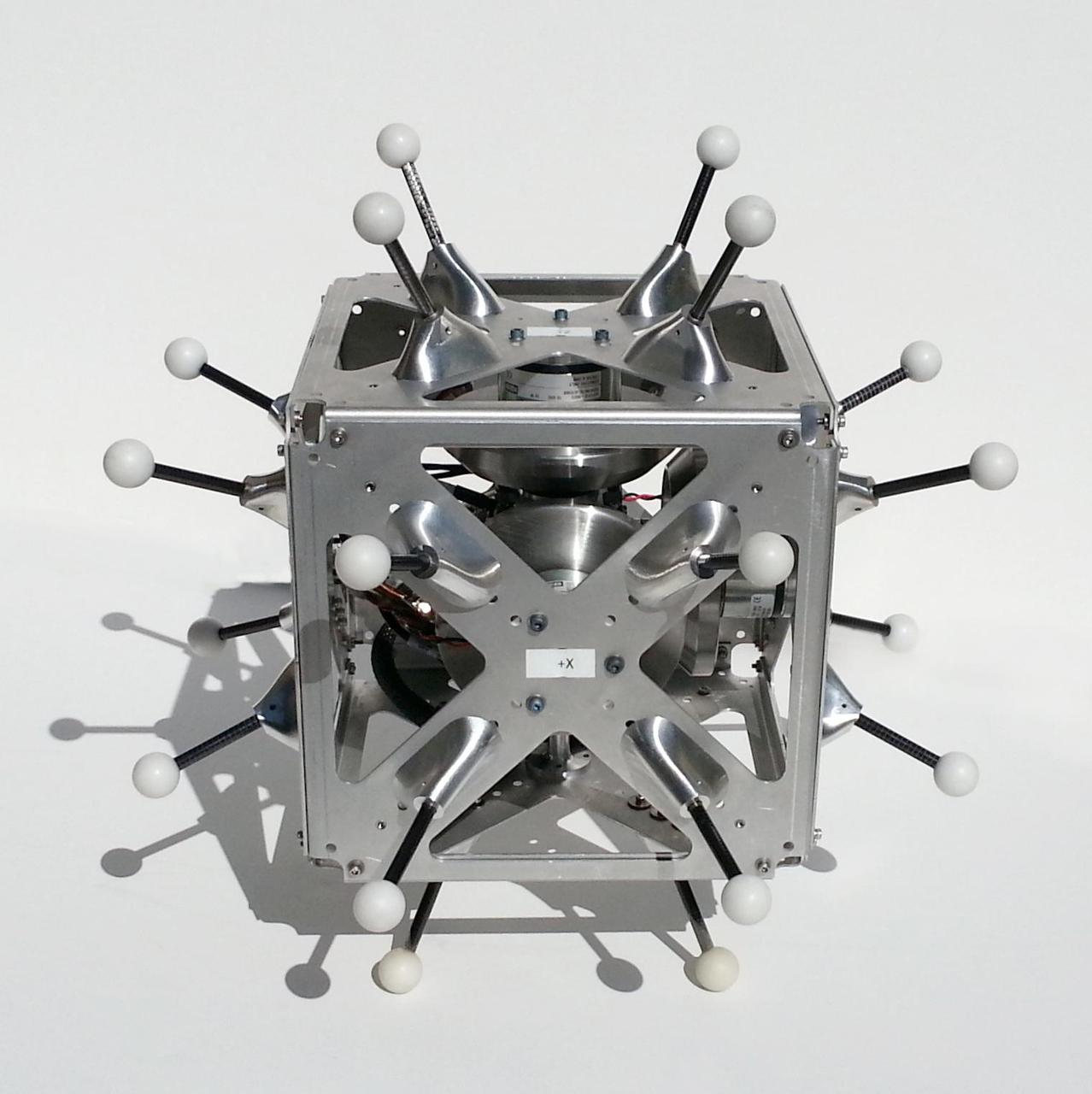
This is a hopping/tumbling robot called Hedgehog that scientists at NASA Jet Propulsion Laboratory will test on a parabolic aircraft flight.

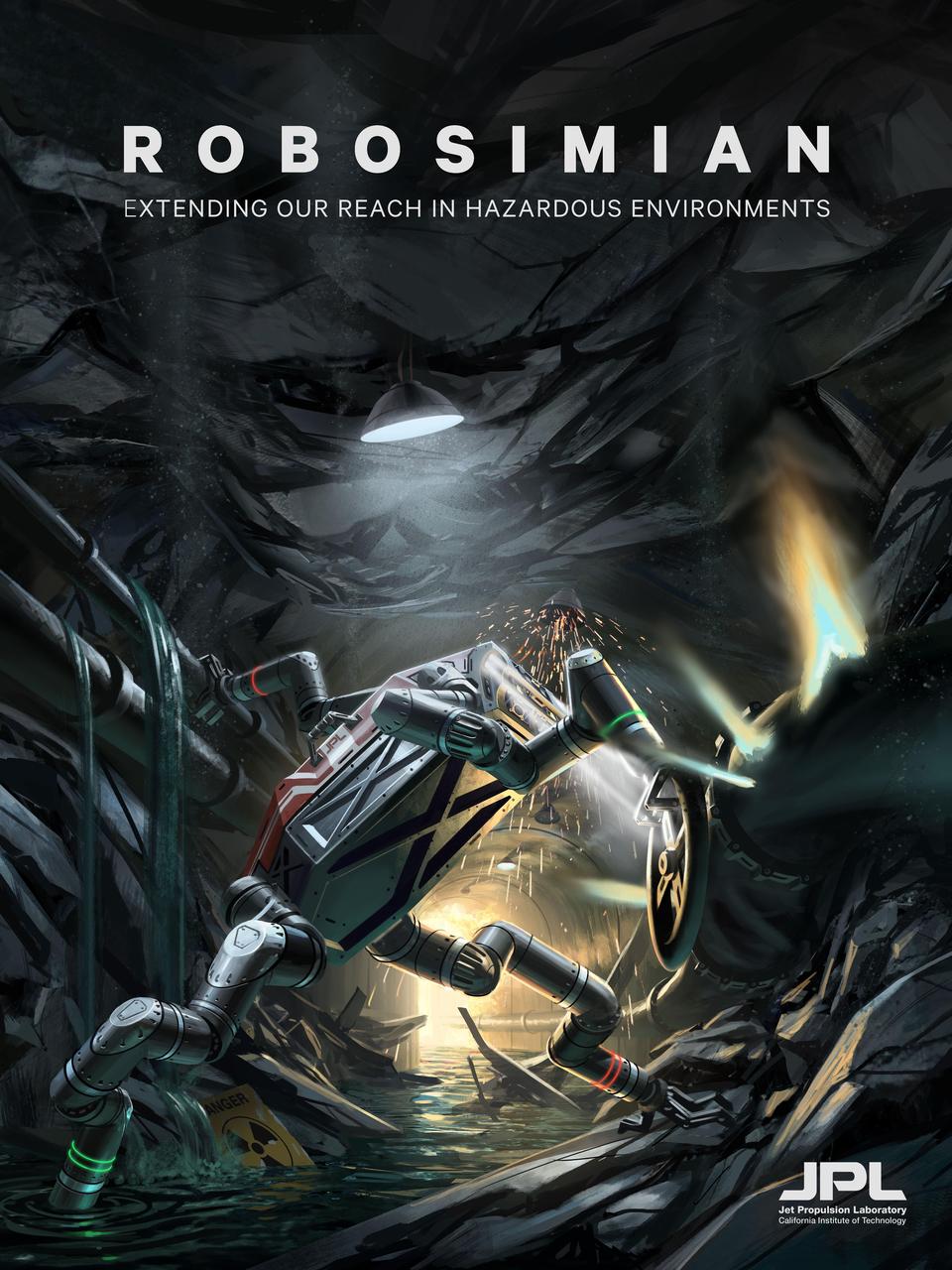
This artist concept depicts RoboSimian, a disaster-relief and -mitigation robot, grasping the rung of a ladder. RoboSimian is an ape-like robot designed and built at NASA Jet Propulsion Laboratory, Pasadena, Calif.

This artist's concept shows Surrogate, a robot that could one day assist in disasters or hazardous situations such as a dangerous chemical laboratory. Surrogate was designed and built at the Jet Propulsion Laboratory in Pasadena, California. Its components came from RoboSimian, another JPL-built robot designed for disaster relief and mitigation (see PIA19313). Surrogate rolls on a track rather than moving on its limbs. http://photojournal.jpl.nasa.gov/catalog/PIA19314

ISS034-E-037346 (31 Jan. 2013) --- Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works with Robonaut 2, the first humanoid robot in space, in the International Space Station’s Destiny laboratory. R2 was powered up so ground controllers could run it through a series of tests and configuration checks.

In the middle of this image taken at the Jet Propulsion Laboratory, the long robotic arm of NASA Mars Science Laboratory rises straight up toward the ceiling of the lab where it is being tested.

A prototype of the transforming robot Shapeshifter is tested in the robotics yard at NASA's Jet Propulsion Laboratory. Shapeshifter is made of smaller robots that can morph into rolling spheres, flying drones, swimming submersibles and more. Shapeshifter is a developing concept for a transformational vehicle to explore treacherous, distant worlds. The flying amphibious robot is part of the early-stage research program NASA Innovative Advanced Concepts (NIAC), which offers several phases of funding to visionary concepts, helping turn ideas that sound like science fiction into science fact. JPL Principle Investigator Ali Agha envisions Shapeshifter as a mission to Saturn's moon Titan, the only other world in the solar system known to have liquid in the form of methane lakes, rivers and seas on its surface. https://photojournal.jpl.nasa.gov/catalog/PIA23433

A shoebox-sized wheeled robot explores the rugged terrain on the surface of the Mars Yard at NASA's Jet Propulsion Laboratory during recent tests of the Autonomous Pop-Up Flat Folding Explorer Robot (A-PUFFER) project. The robots are designed to work in groups, and could form roving teams of small robots that might one day explore the surface of the Moon or Mars. https://photojournal.jpl.nasa.gov/catalog/PIA23793
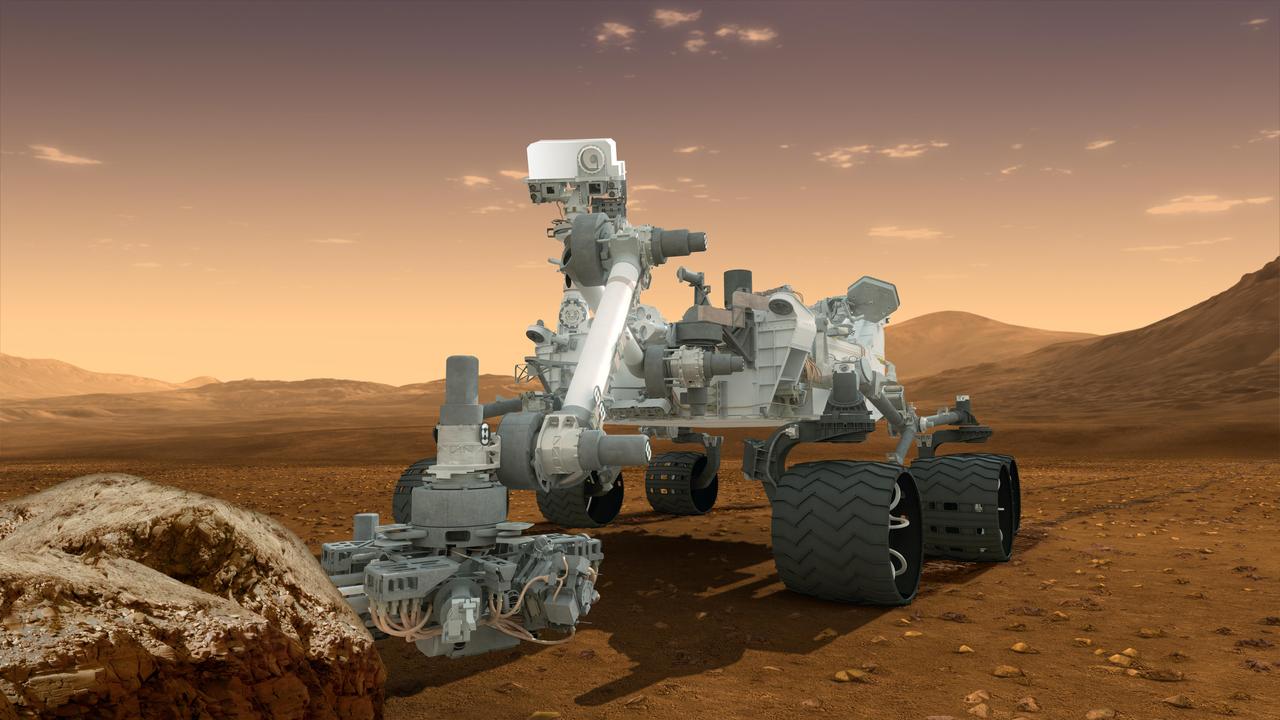
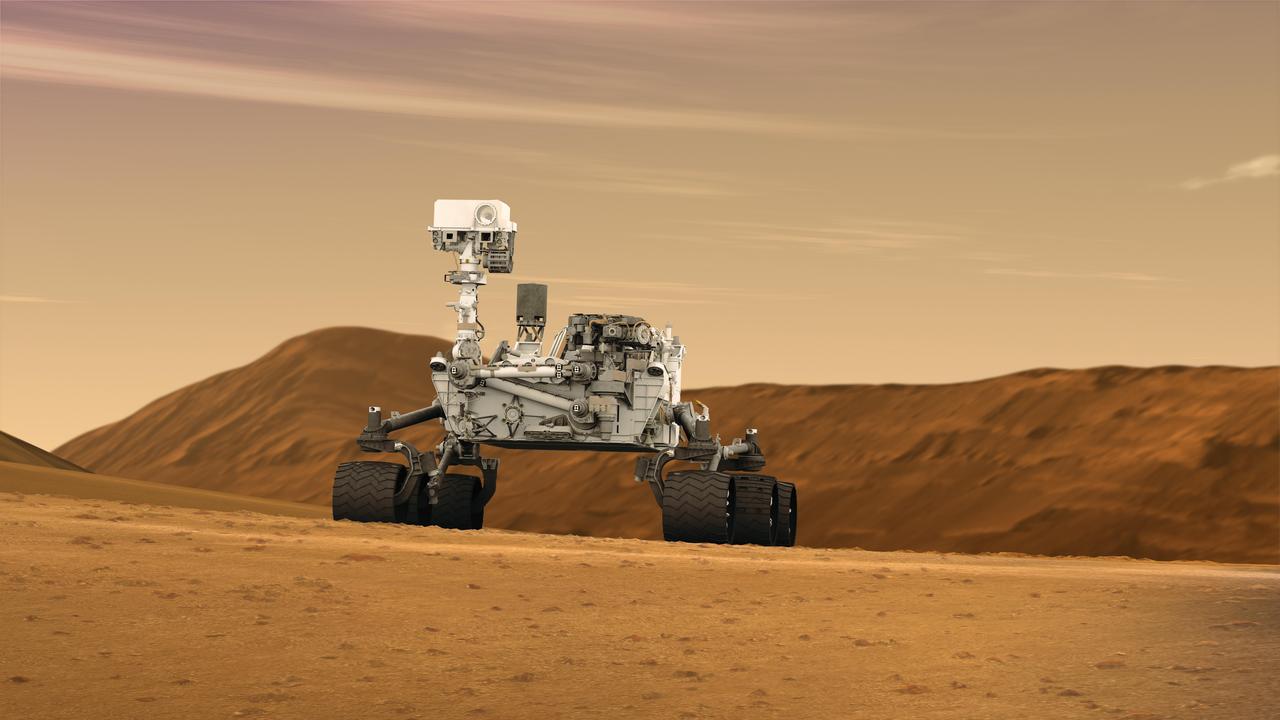
This artist concept features NASA Mars Science Laboratory Curiosity rover, a mobile robot for investigating Mars past or present ability to sustain microbial life.
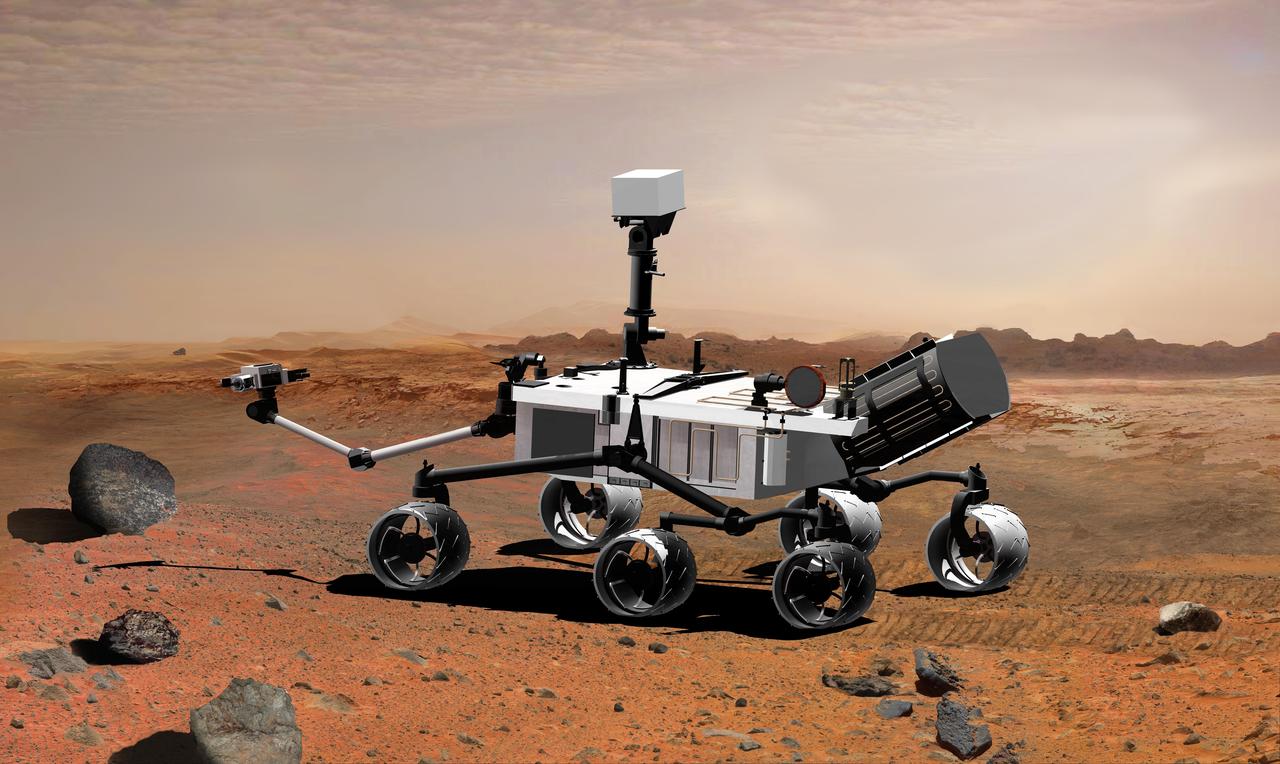
NASA Mars Science Laboratory, a mobile robot for investigating Mars past or present ability to sustain microbial life, is in development for a launch opportunity in 2011 previously 2009.

RoboSimian is an ape-like robot that moves around on four limbs designed. It was designed and built at NASA Jet Propulsion Laboratory in Pasadena, California.
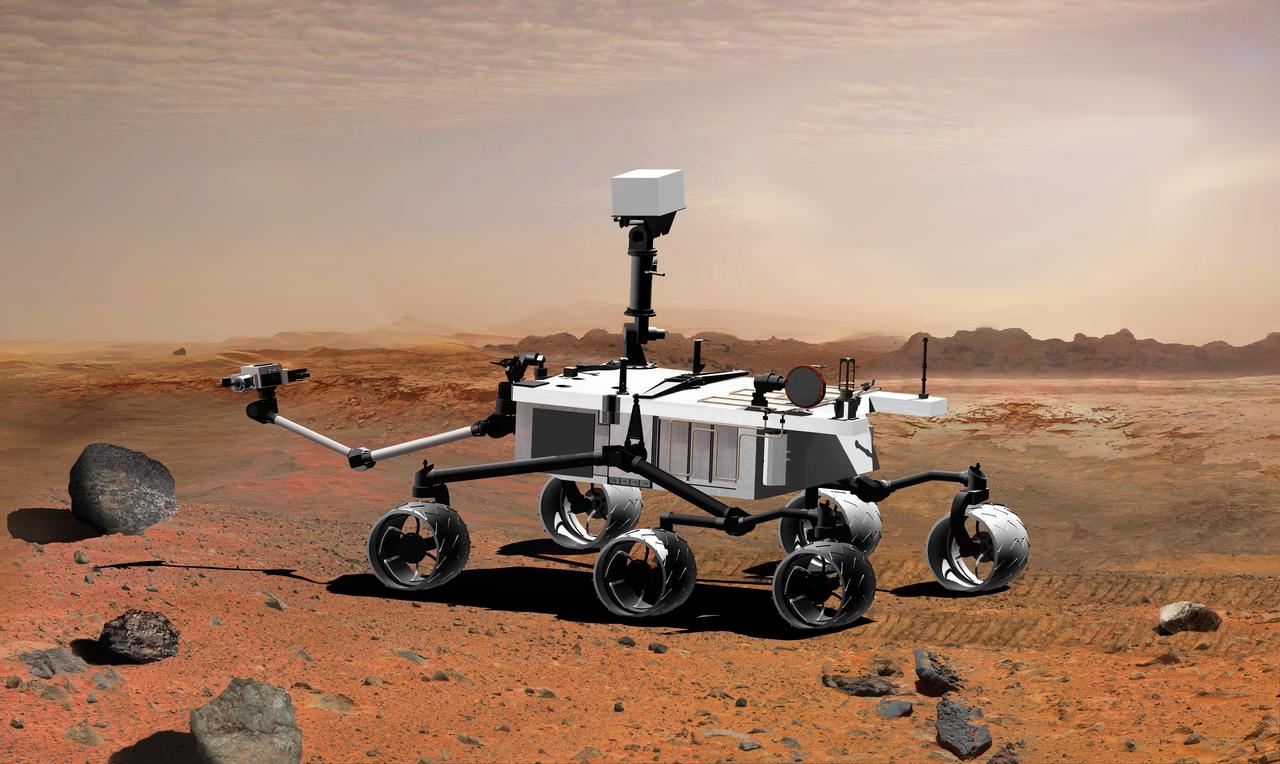
NASA Mars Science Laboratory, a mobile robot for investigating Mars past or present ability to sustain microbial life, is in development for a launch opportunity in 2011 previously 2009.

In this image, engineers from NASA Jet Propulsion Laboratory test and flex Curiosity robotic arm and tools. A video can be viewed at the Photojournal.

View of Astronauts Steve MacLean, Canadian Space Agency (CSA), Mission Specialist (MS), and Jeffrey N. Williams, Expedition 13 Flight Engineer (FE) and NASA Space Station Science Officer working at the Space Stations Robotic Arm to slowly move the 17 and a half ton P3/P4 truss to the port side of the Integrated Truss System. They will align it using a television camera and then mate it to the P1. Photo was taken in the U.S. Laboratory/Destiny during Expedition 13 / STS-115 joint operations.
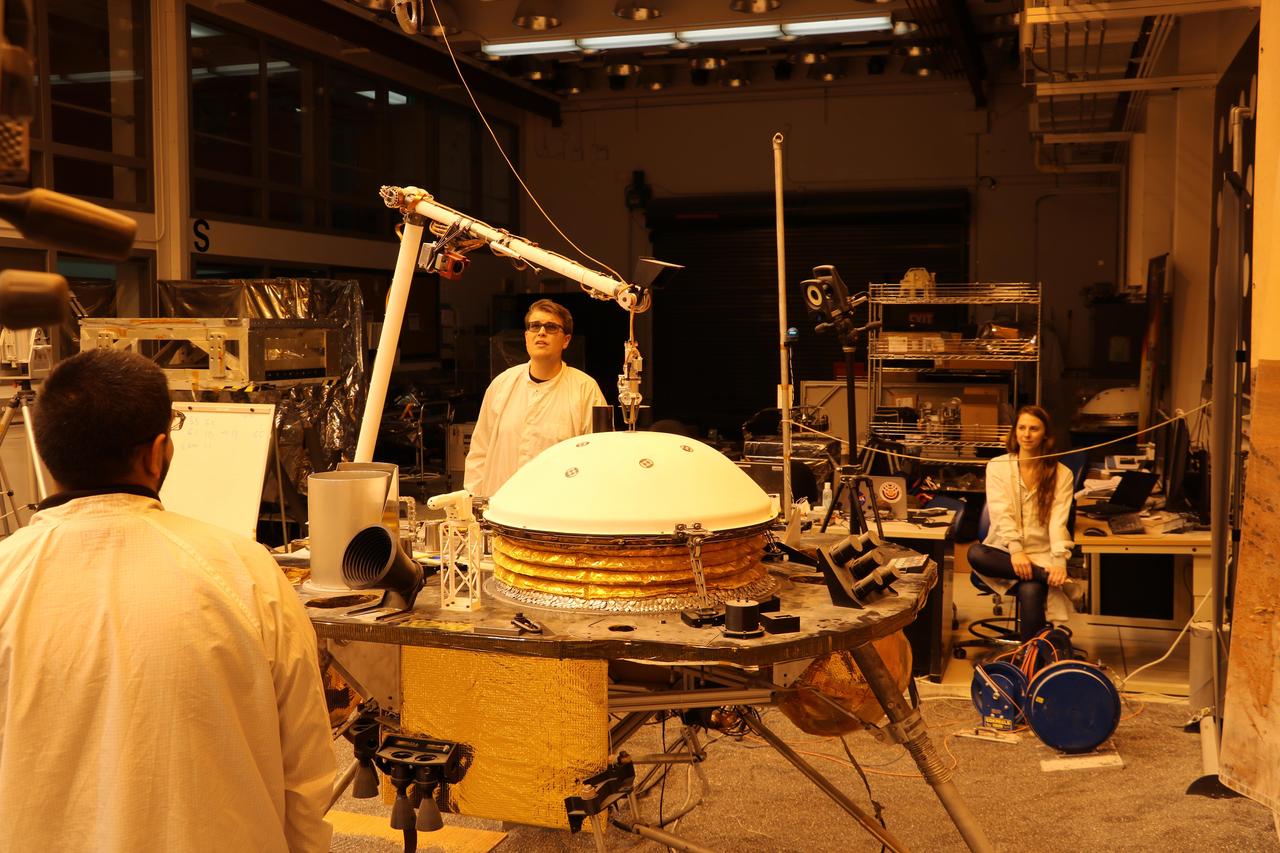
NASA's InSight mission tests an engineering version of the spacecraft's robotic arm in a Mars-like environment at NASA's Jet Propulsion Laboratory. The five-fingered grapple on the end of the robotic arm is lifting up the Wind and Thermal Shield, a protective covering for InSight's seismometer. The test is being conducted under reddish "Mars lighting" to simulate activities on the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA22806

On June 21, 2019, engineers at NASA's Jet Propulsion Laboratory install the main robotic arm on the Mars 2020 rover. Measuring 7 feet (2.1 meters) long, the arm will allow the rover to work as a human geologist would: by holding and using science tools with its turret. https://photojournal.jpl.nasa.gov/catalog/PIA23227

Known as Clyde, RoboSimian is an an ape-like robot designed and built at Jet Propulsion Laboratory, Pasadena, Ca. The robot is four-footed but can also stand on two feet. It has four general-purpose limbs and hands capable of mobility and manipulation.

Camera and robotic-arm maneuvers for taking a self-portrait of the NASA Curiosity rover on Mars were checked first, at NASA Jet Propulsion Laboratory in Pasadena, Calif., using the main test rover for the Curiosity.

This image shows testing under simulated Mars conditions on Earth in preparation for NASA Phoenix Mars Lander using its robotic arm for delivering a sample to the doors of a laboratory oven.
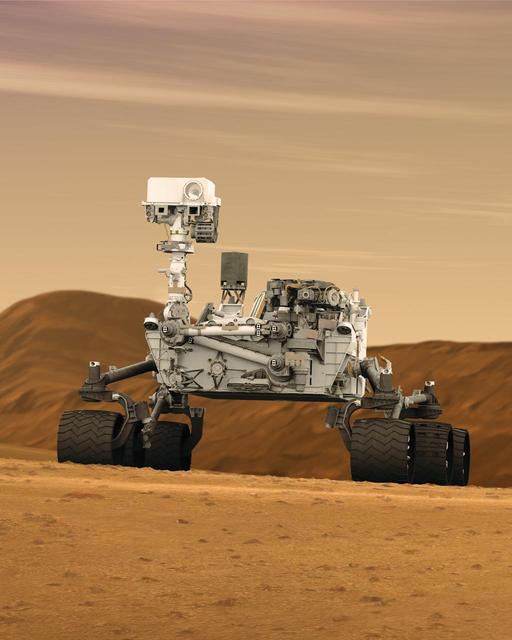
This artist concept features NASA Mars Science Laboratory Curiosity rover, a mobile robot for investigating Mars past or present ability to sustain microbial life. Curiosity is being tested in preparation for launch in the fall of 2011.
This artist concept features NASA Mars Science Laboratory Curiosity rover, a mobile robot for investigating Mars past or present ability to sustain microbial life. Curiosity is being tested in preparation for launch in the fall of 2011.

This photograph of the NASA Mars Science Laboratory rover, Curiosity, was taken during testing on June 3, 2011. The turret at the end of Curiosity robotic arm holds five devices.
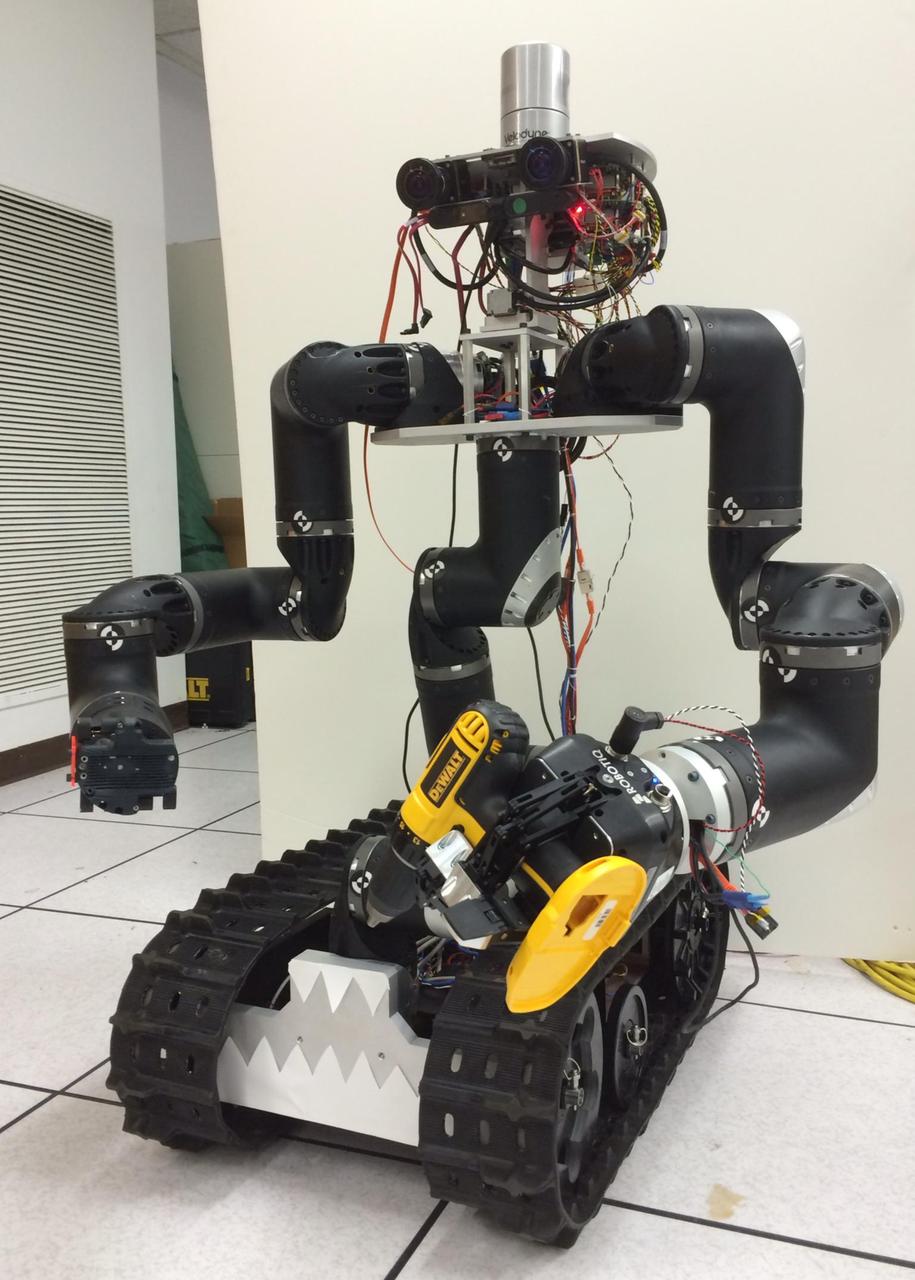
The Surrogate robot Surge, built at NASA Jet Propulsion Laboratory in Pasadena, CA., is being developed in order to extend humanity reach into hazardous environments to perform tasks such as using environmental test equipment.

Test operators in a clean room at NASA Jet Propulsion Laboratory monitor some of the first motions by the robotic arm on the Mars rover Curiosity after installation in August 2010. The arm is shown in a partially extended position.

This photograph of the NASA Mars Science Laboratory rover, Curiosity, was taken during testing on June 3, 2011. The turret at the end of Curiosity robotic arm holds five devices. In this view, the drill is at the six oclock position.

Ames Robotics Laboratory, T-1 Robot in 'sandbox'

A prototype of an autonomous robot, part of a project called IceNode being developed at NASA's Jet Propulsion Laboratory, was tested in the Beaufort Sea north of Alaska in March 2024. The project envisions a fleet of such robots to venture beneath Antarctic ice shelves and gather data that would help scientists calculate how rapidly the ice shelves there are melting – and how fast that melting could cause global sea levels to rise. This image, as well as Figures A and B, shows the team lowering the prototype through a borehole in the sea ice. During this Arctic field test, the robot descended on a tether about 330 feet (100 meters) into the ocean, where its instruments gathered salinity, temperature, and flow data. The team also conducted tests to determine adjustments that would enable them to take the robot off-tether. Each about 8 feet (2.4 meters) long and 10 inches (25 centimeters) in diameter, the robots use three-legged "landing gear" that springs out from one end to attach the robot to the underside of the ice. Rather than using propulsion, the robots would autonomously position themselves with the help of novel algorithms based on models of ocean currents. Released from a borehole or a vessel in the open ocean, the robots would ride those currents on a long journey beneath an ice shelf. They would target the underwater area known as the "grounding zone," where floating ice shelves, ocean, and land meet, deep inside unmapped cavities where the ice may be melting the fastest. Each robot would detach a ballast and rise up to affix itself to the underside of the ice, where their suite of sensors would measure how fast warm, salty ocean water is circulating up to melt the ice, and how quickly cold meltwater is sinking. As conceived, the IceNode fleet would operate for up to a year, continuously capturing data, including seasonal fluctuations. Then the robots would detach themselves from the ice, drift back out to open ocean, and transmit their data via satellite. This test was conducted through the U.S. Navy Arctic Submarine Laboratory's biennial Ice Camp, a three-week operation that provides researchers a temporary base camp from which to conduct field work in the harsh Arctic environment. IceNode has been funded through JPL's internal research and technology development program and its Earth Science and Technology Directorate. JPL is managed for NASA by Caltech in Pasadena, California. https://photojournal.jpl.nasa.gov/catalog/PIA26349

The Planetary Instrument for X-ray Lithochemistry (PIXL) opens its cover during testing at NASA's Jet Propulsion Laboratory. Located on the turret at the end of the rover's robotic arm, the X-ray spectrometer is one of seven instruments aboard Perseverance and will help search for signs of ancient microbial life in rocks. https://photojournal.jpl.nasa.gov/catalog/PIA24093
An engineering version of the robotic arm on NASA's InSight mission lifts the engineering version of the Heat Flow and Physical Properties Probe (HP3) at NASA's Jet Propulsion Laboratory. This test was conducted by InSight team members in a Mars-like environment, including reddish lighting, to simulate conditions InSight will encounter on the Red Planet. The orange tape-like tail behind HP3 is a tether that connects the HP3 support structure to the instrument's back-end electronics box on the lander. https://photojournal.jpl.nasa.gov/catalog/PIA22807
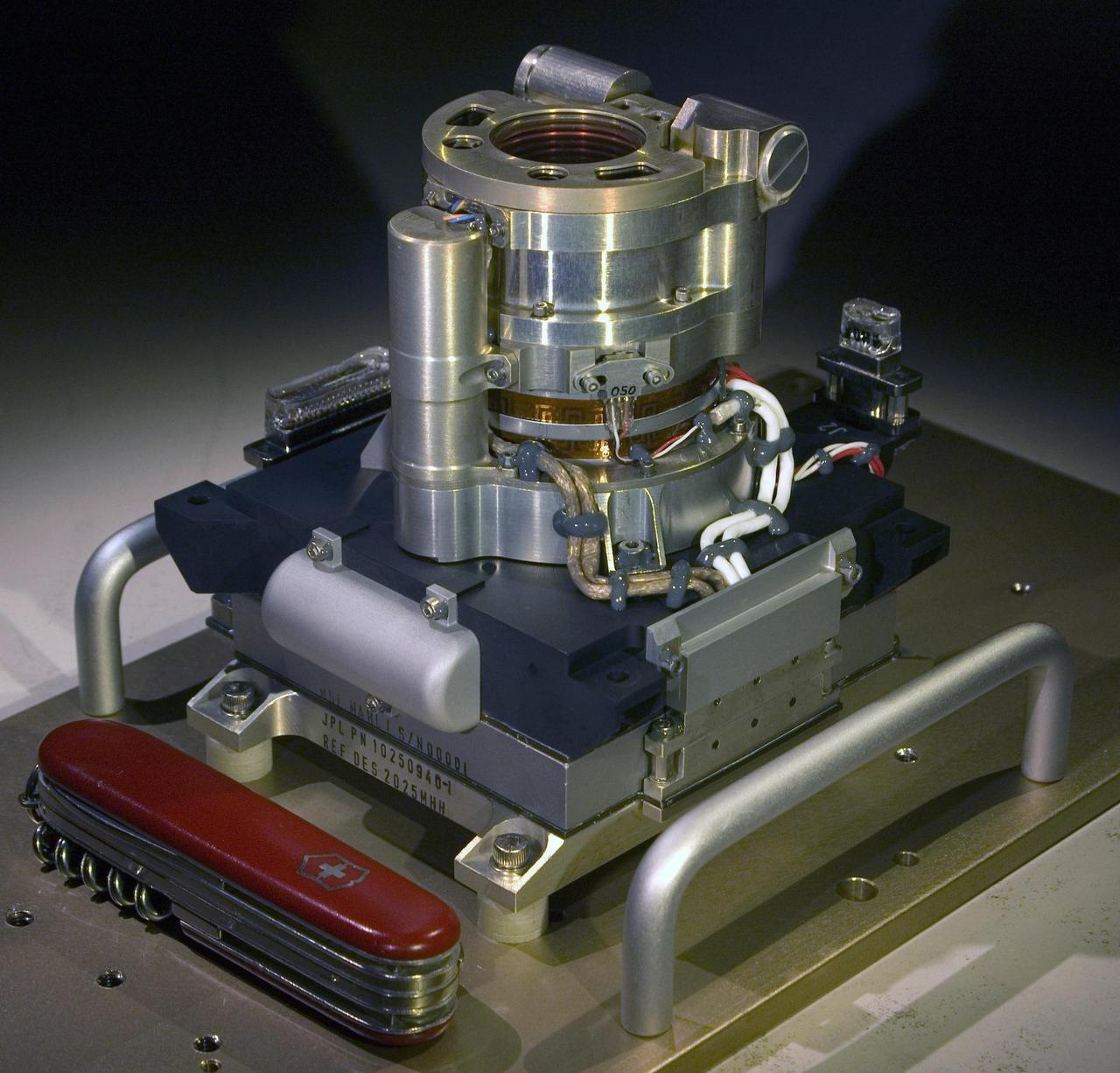
The Mars Hand Lens Imager MAHLI camera will fly on NASA Mars Science Laboratory mission, launching in late 2011. This photo of the camera was taken before MAHLI November 2010 installation onto the robotic arm of the mission Mars rover, Curiosity.

ISS017-E-019979 (19 Oct. 2008) --- NASA astronaut Michael Fincke, Expedition 18 commander, activates the Robotics Laptop Terminal (RLT) of the JEM Robotic Manipulator System (JEMRMS) in the Kibo laboratory of the International Space Station.

iss059e021364 (Aprill 16, 2019) --- Expedition 59 Flight Engineer Anne McClain of NASA uses the robotics workstation inside the U.S. Destiny laboratory module to practice Canadarm2 robotics maneuvers and Cygnus spacecraft capture techniques.

ISS017-E-019977 (19 Oct. 2008) --- NASA astronaut Michael Fincke, Expedition 18 commander, activates the Robotics Laptop Terminal (RLT) of the JEM Robotic Manipulator System (JEMRMS) in the Kibo laboratory of the International Space Station.

iss051e020157 (April 21, 2017) --- Expedition 51 Flight Engineer Thomas Pesquet (foreground) and Commander Peggy Whitson use the robotics work station in the Destiny laboratory module to practice capturing a resupply ship with the Canadarm2 robotic arm.

iss069e009829 (May 10, 2023) --- NASA astronaut and Expedition 69 Flight Engineer Woody Hoburg participates in robotics proficiency training using the Destiny laboratory module's robotics workstation aboard the International Space Station.

iss065e009568 (April 29, 2021) --- NASA astronaut and Expedition 65 Flight Engineer Megan McArthur is at the robotics workstation inside the U.S. Destiny laboratory module participating in Canadarm2 robotic arm training.

iss065e006588 (April 26, 2021) --- NASA astronaut and Expedition 65 Flight Engineer Megan McArthur participates in robotics proficiency training at the Destiny laboratory module's robotics workstation aboard the International Space Station.

iss067e043308 (May 13, 2022) --- The European robotic arm, the International Space Station's third and newest robotic arm, is pictured attached to the Nauka multipurpose laboratory module on the orbitng lab's Russian segment.

iss071e180163 (June 10, 2024) --- Expedition 71 Flight Engineers Mike Barratt and Jeanette Epps, both NASA astronauts, look at computer monitors on the Destiny laboratory module's robotics workstation that controls the Canadarm2 robotic arm.

iss065e009564 (April 28, 2021) --- NASA astronaut and Expedition 65 Flight Engineer Shane Kimbrough is at the robotics workstation inside the U.S. Destiny laboratory module participating in Canadarm2 robotic arm training.

Project manager Jean-Pierre de la Croix works on an Autonomous Pop-Up Flat Folding Explorer Robot (A-PUFFER) during recent trials in the Mars Yard at NASA's Jet Propulsion Laboratory. This PUFFER is equipped with an onboard computer and stereo camera as well as other sensors to help it autonomously navigate and collaborate with other PUFFERs. https://photojournal.jpl.nasa.gov/catalog/PIA23794

View of Robonaut 2 during a round of testing,in the U.S. Laboratory. Photo was taken during Expedition 34.

KENNEDY SPACE CENTER, FLA. - Members of the STS-114 crew take a look at the Japanese Experiment Module (JEM) pressure module in the Space Station Processing Facility. A research laboratory, the pressurized module is the first element of the JEM, named "Kibo" (Hope), to be delivered to KSC. The National Space Development Agency of Japan (NASDA) developed the laboratory at the Tsukuba Space Center near Tokyo and is Japan's primary contribution to the Station. The JEM also includes an exposed facility (platform) for space environment experiments, a robotic manipulator system, and two logistics modules. The various JEM components will be assembled in space over the course of three Shuttle missions.
iss071e046284 (May 1, 2024) -- One of the International Space Station's free-flying robots, Astrobee, was pictured by NASA astronaut and Expedition 71 Flight Engineer Tracy C. Dyson during a Zero Robotics tech demonstration. Zero Robotics allows students on Earth to write software to control the robots and observe their performance inside the orbiting laboratory.
This artist's concept shows RoboSimian, a robot intended to assist with disaster relief and mitigation. RoboSimian is an ape-like robot that moves around on four limbs. It was designed and built at the Jet Propulsion Laboratory in Pasadena, California. It will compete in the 2015 DARPA Robotics Challenge Finals. To get the robot in shape for the contest, researchers at JPL are collaborating with partners at University of California, Santa Barbara, and the California Institute of Technology. http://photojournal.jpl.nasa.gov/catalog/PIA19313

iss068e024067 (Nov. 25, 2022) --- The European robotic arm is pictured extending out from the International Space Station's Nauka multipurpose laboratory module.

NASA astronaut Karen Nyberg,Expedition 36 flight engineer,is pictured with Robonaut 2,the first humanoid robot in space,in the Destiny laboratory of the International Space Station.

iss060e007162 (July 12, 2020) --- NASA astronaut and Expedition 60 Flight Engineer Christina Koch tests the mobility of the free-flying Astrobee robotic assistant inside the Kibo laboratory module. Astrobee consists of three self-contained, free flying robots and a docking station inside the International Space Station.

iss066e087003 (Dec. 4, 2021) --- ESA (European Space Agency) astronaut and Expedition 66 Flight Engineer Matthias Maurer is pictured inside the Kibo laboratory module setting up an Astrobee robotic free-flyer for the ReSWARM experiment. The robotics demonstration tests autonomous microgravity motion planning and control for on-orbit assembly and coordinated motion.

iss068e017665 (Oct. 20, 2022) --- The International Space Station's third and newest robotic manipulator, the European robotic arm (ERA), is pictured attached to the Nauka multipurpose laboratory module. The ERA provides additional payload support and spacewalk assistance on the orbiting lab's Russian segment.

iss065e012810 (May 3, 2021) --- NASA astronaut and Expedition 65 Flight Engineer Shane Kimbrough is pictured inside the Kibo laboratory module with the Astrobee free-flying robotic assistants. Kimbrough was monitoring the cube-shaped robotic free-flyers as they were testing automated rendezvous techniques.

iss071e010043 (April 18, 2024) --- Expedition 71 Flight Engineer and NASA astronaut Matthew Dominick practices operating the Canadarm2 robotic arm during a proficiency test using the robotics workstation aboard the Interntional Space Station's Destiny laboratory module.

iss059e072286 (May 23, 2020) --- Expedition 59 Flight Engineer David Saint-Jacques of the Canadian Space Agency prepares the free-flying Astrobee robotic assistant for a mobility test inside the Kibo laboratory module. Astrobee consists of three self-contained, free flying robots and a docking station inside the International Space Station.

ISS048e028558 (07/18/2016) --- NASA astronauts Jeff Williams (left) and Kate Rubins (right) train inside the Destiny laboratory for the robotic capture of SpaceX’s Dragon spacecraft. Williams was the primary robotic arm operator and Rubins supported from a backup role.

ISS028-E-030757 (22 Aug. 2011) --- Robonaut 2 ? the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station shortly after it was powered up and teams on the ground sent power to the robot for the first time in space.

iss059e021373 (Aprill 16, 2019) --- Expedition 59 Flight Engineers David Saint-Jacques and Anne McClain use the robotics workstation inside the U.S. Destiny laboratory module to practice Canadarm2 robotics maneuvers and Cygnus spacecraft capture techniques.

iss061e033521 (Nov. 11, 2019) --- Astronauts Luca Parmitano (left) and Andrew Morgan review robotics procedures in the U.S. Destiny laboratory module. Astronaut Jessica Meir will operate the Canadarm2 robotic arm to support the duo during a series of spacewalks to repair the International Space Station's cosmic particle detector, the Alpha Magnetic Spectrometer (AMS).

This artist's rendering shows a concept for a robot called AquaSimian that would assist with hazardous situations underwater. The concept is derived from RoboSimian, a land-based robot designed and built at the Jet Propulsion Laboratory in Pasadena, California. RoboSimian is shown in PIA19313. http://photojournal.jpl.nasa.gov/catalog/PIA19315
ISS028-E-030755 (22 Aug. 2011) --- Robonaut 2 ? the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station shortly after it was powered up and teams on the ground sent power to the robot for the first time in space.
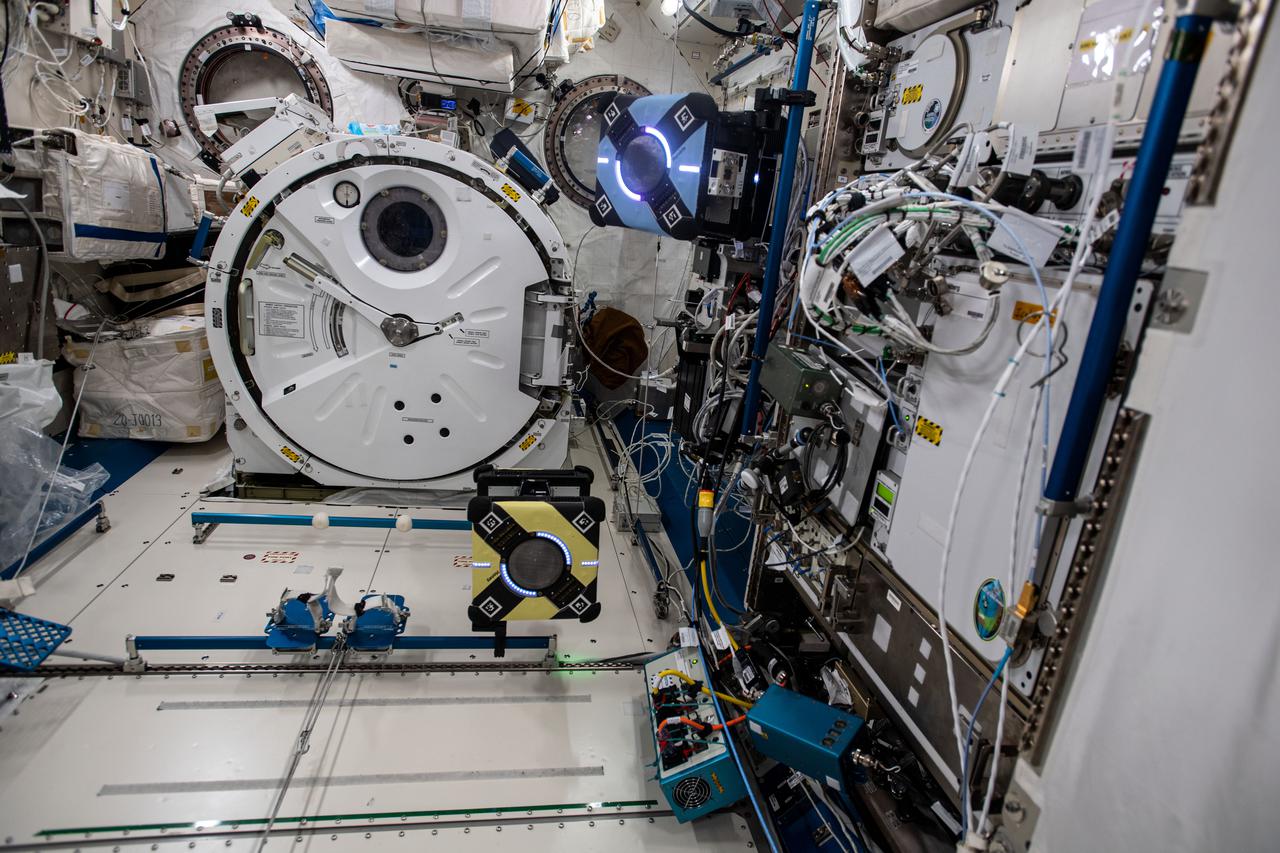
iss064e029291 (Feb. 4, 2021) --- A pair of Astrobee experimental robotic assistants are pictured flying around inside the Japanese Kibo laboratory module. The cube-shaped, toaster-sized robots were being tested for their ability to autonomously navigate and maneuver inside the International Space Station.

iss064e029280 (Feb. 4, 2021) --- NASA astronaut and Expedition 64 Flight Engineer Kate Rubins poses with a pair of AstroBee robotic assistants inside the Japanese Kibo laboratory module. The cube-shaped, toaster-sized robots are being tested for their ability to autonomously navigate and maneuver inside the orbiting lab.

iss064e035633 (Feb. 23, 2021) --- JAXA (Japan Aerospace Exploration Agency) astronaut and Expedition 64 Flight Engineer Soichi Noguchi is pictured during training activities on the robotics work station, which controls the Canadarm2 robotic arm, located inside the International Space Station's U.S. Destiny laboratory module.

iss059e021373 (Aprill 16, 2019) --- Expedition 59 Flight Engineers Anne McClain and David Saint-Jacques use the robotics workstation inside the U.S. Destiny laboratory module to practice Canadarm2 robotics maneuvers and Cygnus spacecraft capture techniques.

iss061e033522 (Nov. 11, 2019) --- NASA astronaut Jessica Meir reviews robotics procedures in the U.S. Destiny laboratory module. She will operate the Canadarm2 robotic arm to support a series of spacewalks by astronauts Luca Parmitano and Andrew Morgan to repair the International Space Station's cosmic particle detector, the Alpha Magnetic Spectrometer (AMS).

iss064e029277 (Feb. 4, 2021) --- NASA astronaut and Expedition 64 Flight Engineer Shannon Walker poses with a pair of Astrobee robotic assistants docked to their ports inside the Japanese Kibo laboratory module. The cube-shaped, toaster-sized robots are being tested for their ability to autonomously navigate and maneuver inside the orbiting lab.

iss066e109611 (Jan. 6, 2022) --- Expedition 66 Flight Engineers Kayla Barron of NASA and Matthias Maurer of ESA (European Space Agency) participate in a Canadarm2 robotic arm training session at the U.S. Destiny laboratory module's robotics workstation aboard the International Space Station.

David Lalejini, an employee of the Naval Research Laboratory at NASA's John C. Stennis Space Center, helps a pair of teachers deploy a remotely-operated underwater Sea Perch robot during workshop activities Dec. 11. The Stennis Education Office teamed with Naval Research Laboratory counterparts to conduct a two-day workshop Dec. 10-11 for Louisiana and Mississippi teachers. During the no-cost workshop, teachers learned to build and operate Sea Perch robots. The teachers now can take the Sea Perch Program back to students.
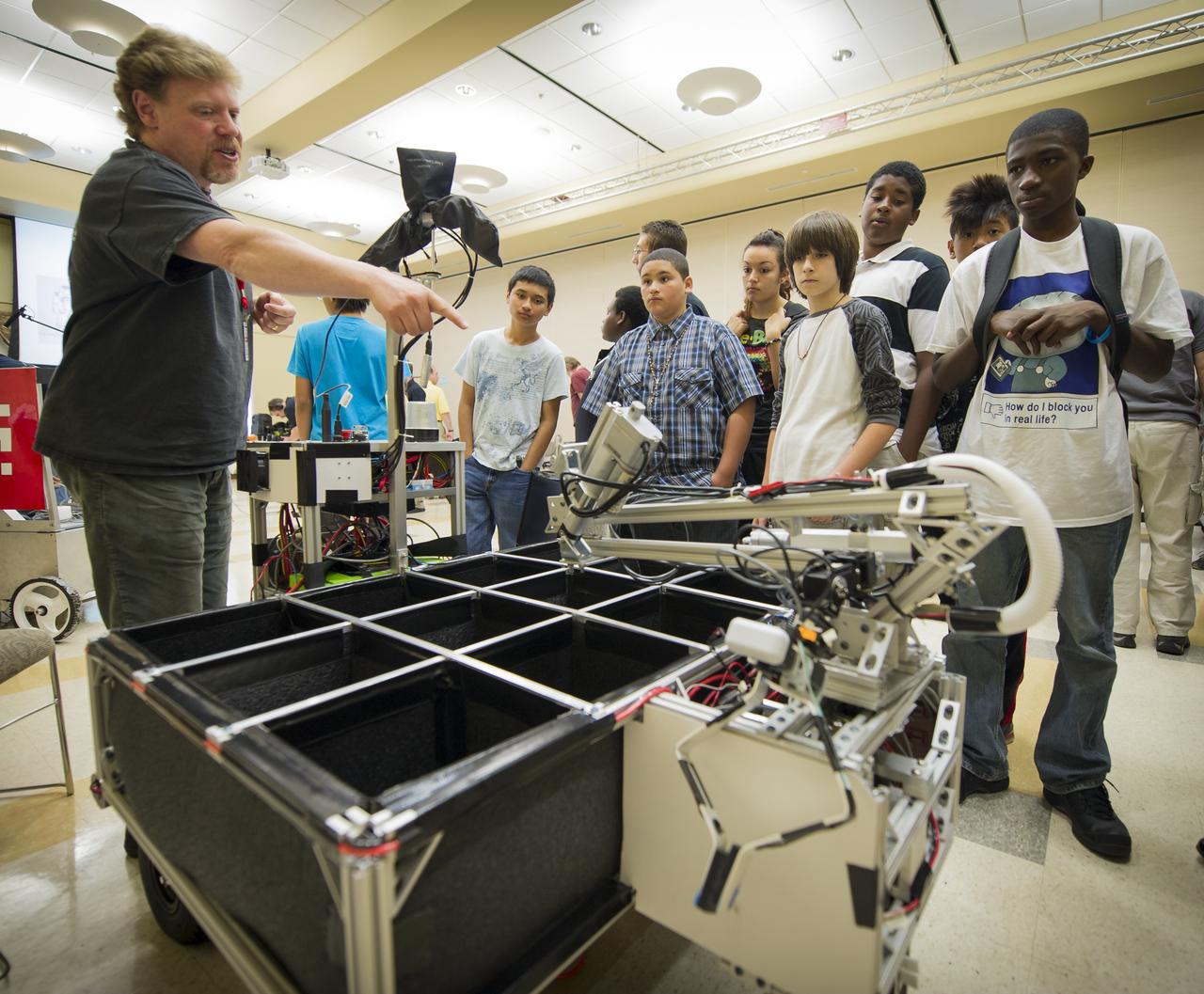
Wunderkammer Laboratory Team leader Jim Rothrock, left, answers questions from 8th grade Sullivan Middle School (Mass.) students about his robot named "Cerberus" on Friday, June 15, 2012, at the Worcester Polytechnic Institute (WPI) in Worcester, Mass. Rothrock's robot team will compete for a $1.5 million NASA prize in the NASA-WPI Sample Return Robot Centennial Challenge at WPI. Teams have been challenged to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

iss073e0133686 (June 3, 2025) --- JAXA (Japan Aerospace Exploration Agency) astronaut and Expedition 73 Commander is pictured during maintenance operations on the Japanese robotic arm's Small Fine Arm inside the Kibo laboratory module. The Small Fine Arm is used for precise and dexterous robotic maneuvers when grappling small components or payloads on the outside of the International Space Station. There are two other robotic arms on the outside of the orbital outpost including the Canadarm2 robotic arm and the European robotic arm (ERA). Canadarm2 can be used to maneuver spacecraft, spacewalkers, and large payloads. ERA can also be used to maneuver spacewalkers and space station components.

iss057e056725 (Oct. 25, 2018) --- The International Space Station was orbiting 256 miles above the North Pacific Ocean and about 600 miles south of Alaska's Aleutian Islands. In the foreground, are portions of two major space station robotic systems. At right, is the Japanese robotic manipulator system which is attached to the Kibo laboratory module. At upper left, is part of the Canadian robotic manipulator system which can maneuver along various points on the space station.

iss071e297582 (July 9, 2024) --- NASA astronaut and Expedition 71 Flight Engineer Tracy C. Dyson is pictured inside the International Space Station's Columbus laboratory module. She was exploring ways to control a robot on the ground from a spacecraft. Dyson coordinated with robotics engineers on Earth remotely manipulating a robot using a computer while testing its ergonomic features and haptic feedback for conditions such as wind and gravity. Results may inform future exploration missions to the Moon, Mars, and beyond.

iss071e318587 (July 10, 2024) --- NASA astronaut and Expedition 71 Flight Engineer Jeanette Epps is pictured inside the International Space Station's Columbus laboratory module. She was exploring ways to control a robot on the ground from a spacecraft. Epps coordinated with robotics engineers on Earth remotely manipulating a robot using a computer while testing its ergonomic features and haptic feedback for conditions such as wind and gravity. Results may inform future exploration missions to the Moon, Mars, and beyond.

iss068e017746 (Oct. 21, 2022) --- Expedition 68 Flight Engineer Koichi Wakata of the Japan Aerospace Exploration Agency (JAXA) checks out the robotics console and its interfaces that control the Japanese robotic arm attached to the Kibo laboratory module. The robotic manipulator system maneuvers scientific payloads in and out of Kibo's airlock to the Exposed Facility for external research operations.

S115-E-E-05528 (12 Sept. 2006) --- Astronaut Steven G. MacLean, representing the Canadian Space Agency, works at the controls for the Canadarm2 or space station remote manipulator arm as part of the team effort to successfully complete "installation day" on the International Space Station. The Atlantis and Expedition 13 crews worked on attaching the P3/P4 truss during the first of three scheduled spacewalks by STS-115 shuttle crew members. Today's space walkers were astronauts Joseph R. Tanner and Heidemarie M. Stefanyshyn-Piper.
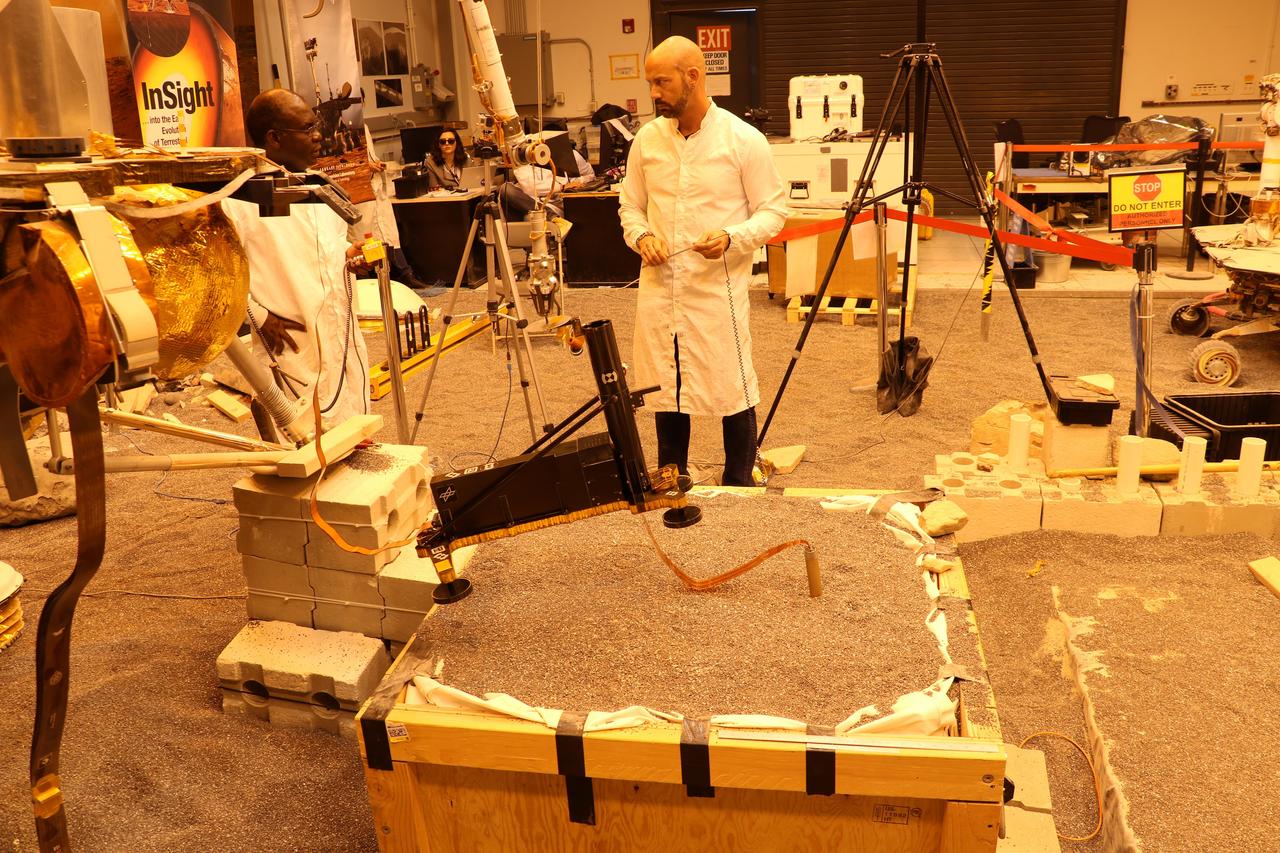
Engineers in a Mars-like test area at NASA's Jet Propulsion Laboratory try possible strategies to aid the Heat Flow and Physical Properties Package (HP3) on NASA's InSight lander, using engineering models of the lander, robotic arm and instrument. In this image, the model's robotic arm is lifting up part of HP3 to expose the self-hammering mole that is partially embedded in the testbed soil. Standing mid-ground are engineers Ashitey Trebi-Ollennu (left) and Troy Lee Hudson (right). Lights in the testbed intended to simulate Mars' lighting conditions give the image an orange tint. Engineers at the German Aerospace Center (DLR), which provided HP3, have also been working on strategies to help the probe. https://photojournal.jpl.nasa.gov/catalog/PIA23272

In early 2022, the Cold Operable Lunar Deployable Arm (COLDArm) project – led by NASA's Jet Propulsion Laboratory in Southern California – successfully integrated special gears into pieces of a robotic arm that is planned to perform a robot-controlled lunar surface experiment with imagery in the coming years. These bulk metallic glass (BMG) gears, integrated into COLDArm's joints and actuators, were developed through the Game Changing Development bulk metallic glass gears project to operate at extreme temperatures below minus 280 degrees Fahrenheit (minus 173 degrees Celsius). The gear alloys have a disordered atomic-scale structure, making them both strong and elastic enough to withstand these exceptionally low temperatures. Typical gearboxes require heating to operate at such cryogenic temperatures. The BMG gear motors have been tested and successfully operated at roughly minus 279 degrees Fahrenheit (minus 173 degrees Celsius) without heating assistance. This gear motor is one of the key technologies to enable the robotic arm to operate in extremely cold environments, such as during lunar night. Each of the four joints containing BMG gears will be tested once the arm is fully assembled, which is scheduled for spring of 2022. Robotic joint testing will include dynamometer testing to measure torque/rotational speed, as well as cryogenic thermal vacuum testing to understand how the equipment would perform in an environment similar to space. Once proven, the BMG gears and COLDArm capabilities will enable future missions to work in extreme environments on the Moon, Mars, and ocean worlds. https://photojournal.jpl.nasa.gov/catalog/PIA24567
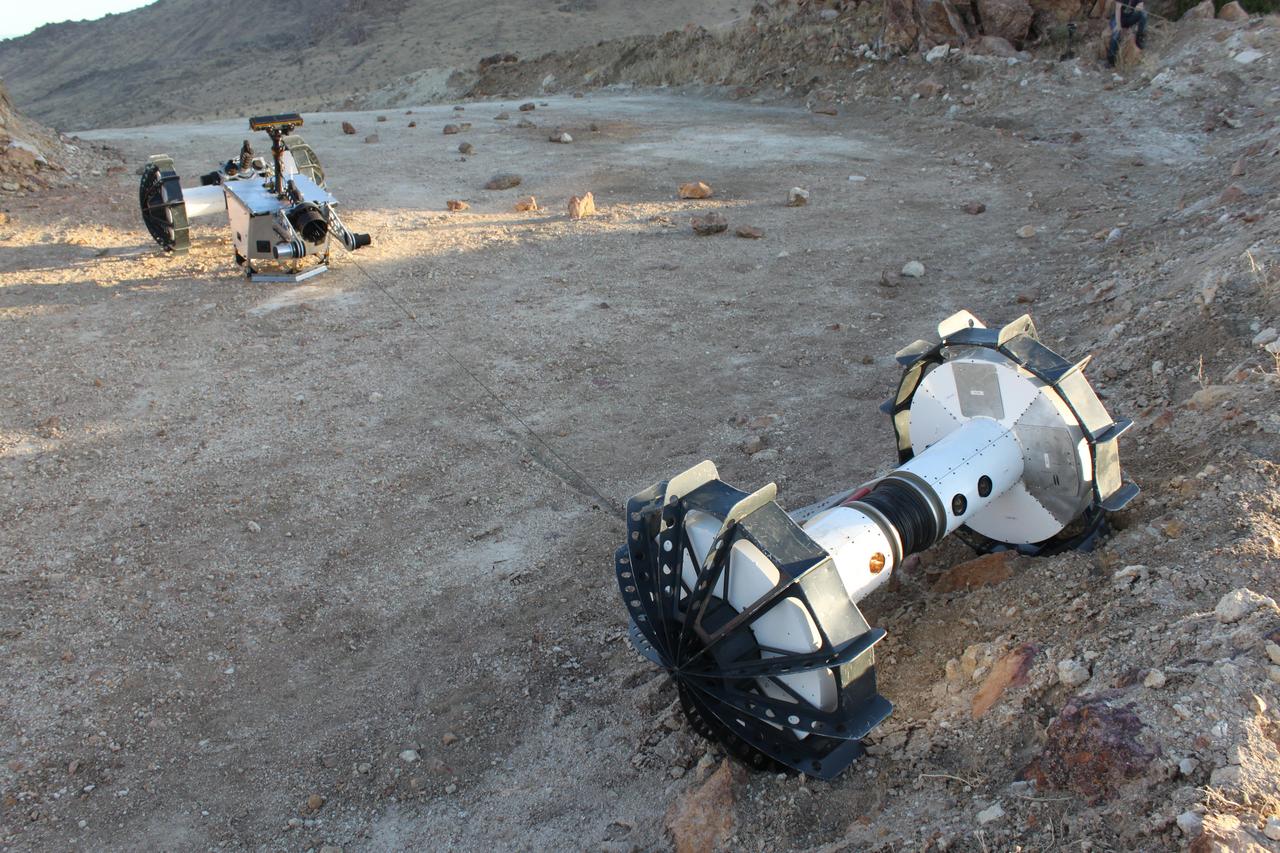
During a field test in the Mojave Desert, the DuAxel robot separates into two single-axled robots so that one can rappel down a slope too steep for conventional rovers. The tether connecting both Axels not only allows the one robot to descend the slope while the other remains anchored in place, it also provides power and a means of communication with the anchoring robot above. The DuAxel project is a technology demonstration being developed by roboticists at NASA's Jet Propulsion Laboratory in Southern California to see how this unconventional rover might fill a niche in the exploration the Moon, Mars, and beyond. https://photojournal.jpl.nasa.gov/catalog/PIA24109

ISS022-E-078339 (2 March 2010) --- Japan Aerospace Exploration Agency (JAXA) astronaut Soichi Noguchi, Expedition 22 flight engineer, works at a robotic workstation in the Kibo laboratory of the International Space Station.