
ISS034-E-027317 (10 Jan. 2013) --- In the Cupola aboard the Earth-orbiting International Space Station, Canadian Space Agency astronaut Chris Hadfield, Expedition 34 flight engineer, works the controls at the Robotic workstation to maneuver the Space Station Remote Manipulator System (SSRMS) or CanadArm2 from its parked position to grapple the Mobile Remote Servicer (MRS) Base System (MBS) Power and Data Grapple Fixture 4 (PDGF-4).

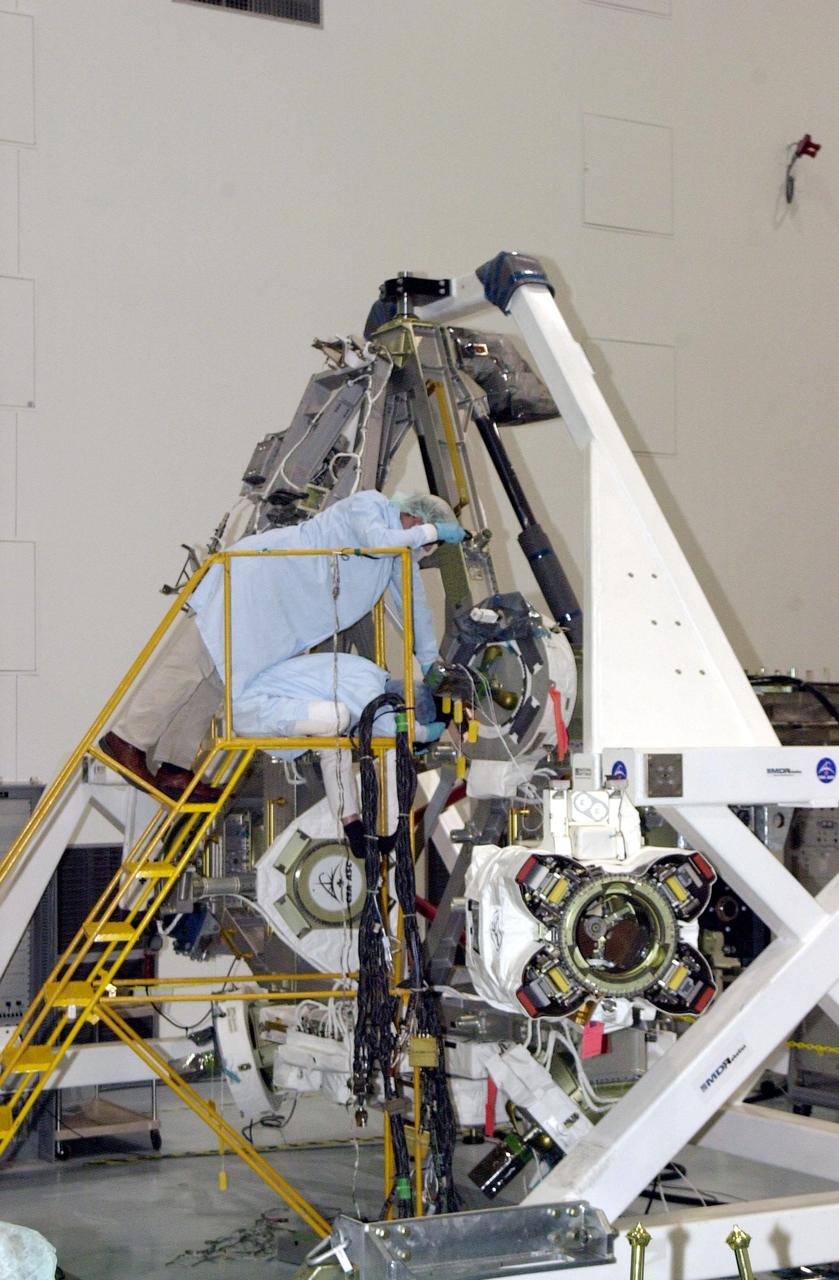
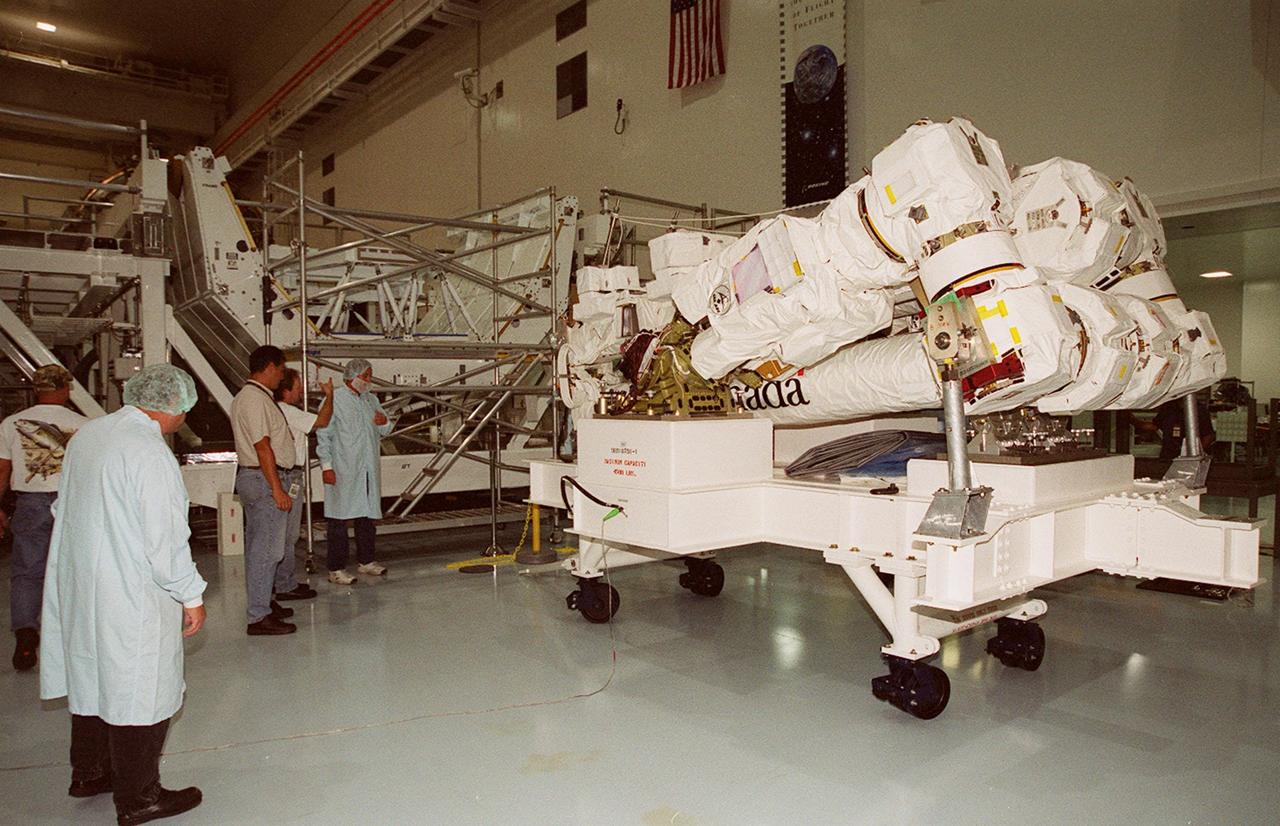
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove a cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
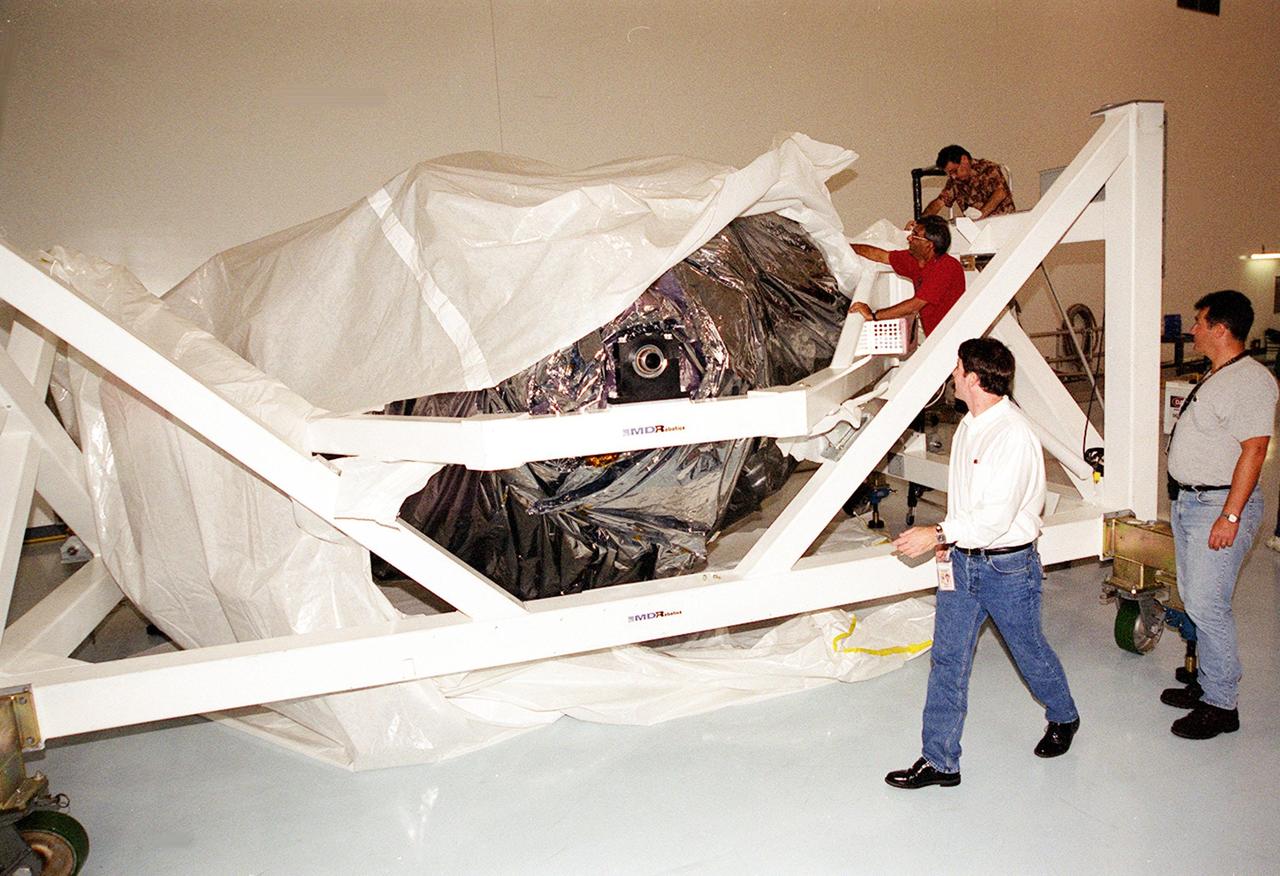
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility remove the cover from the Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

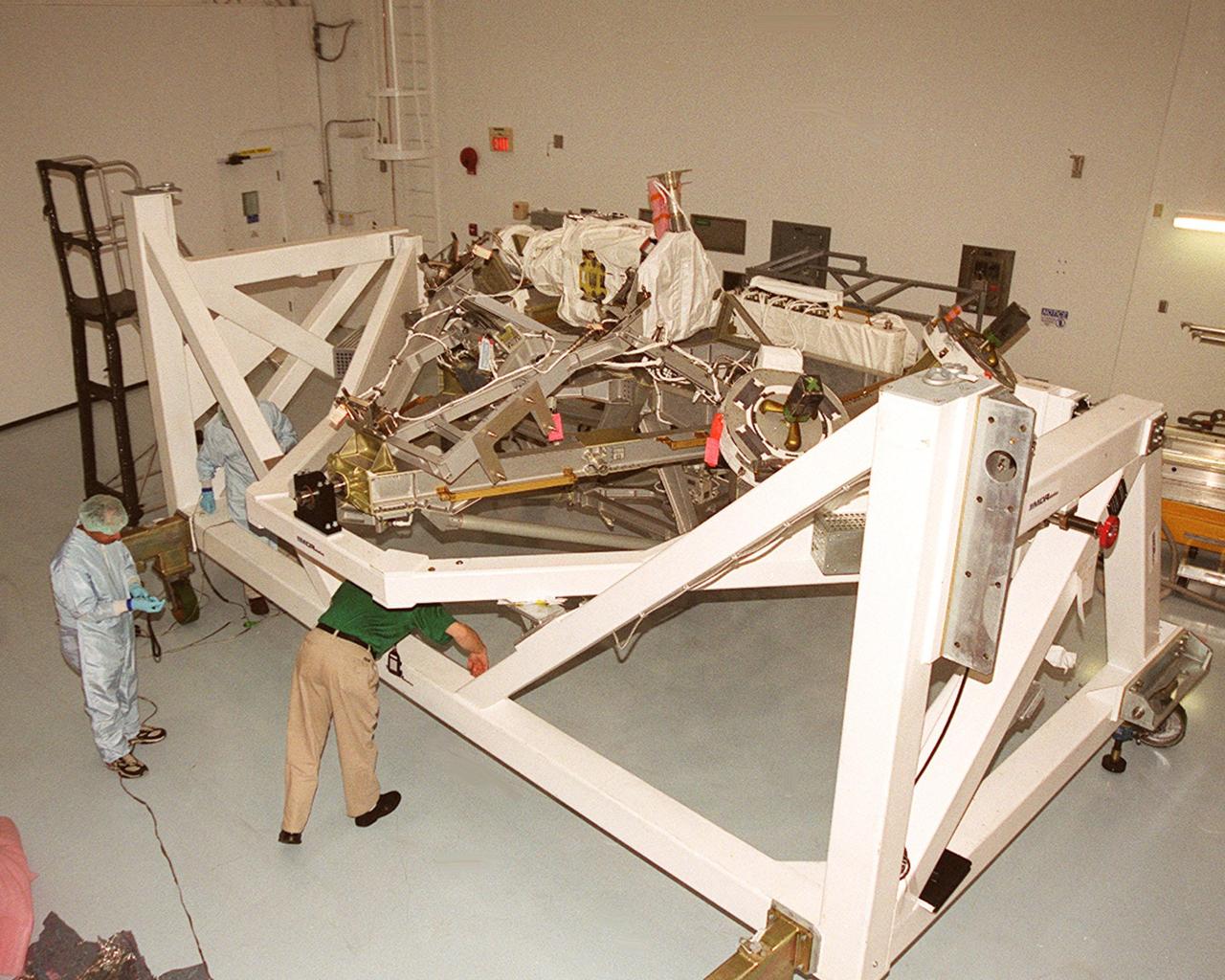
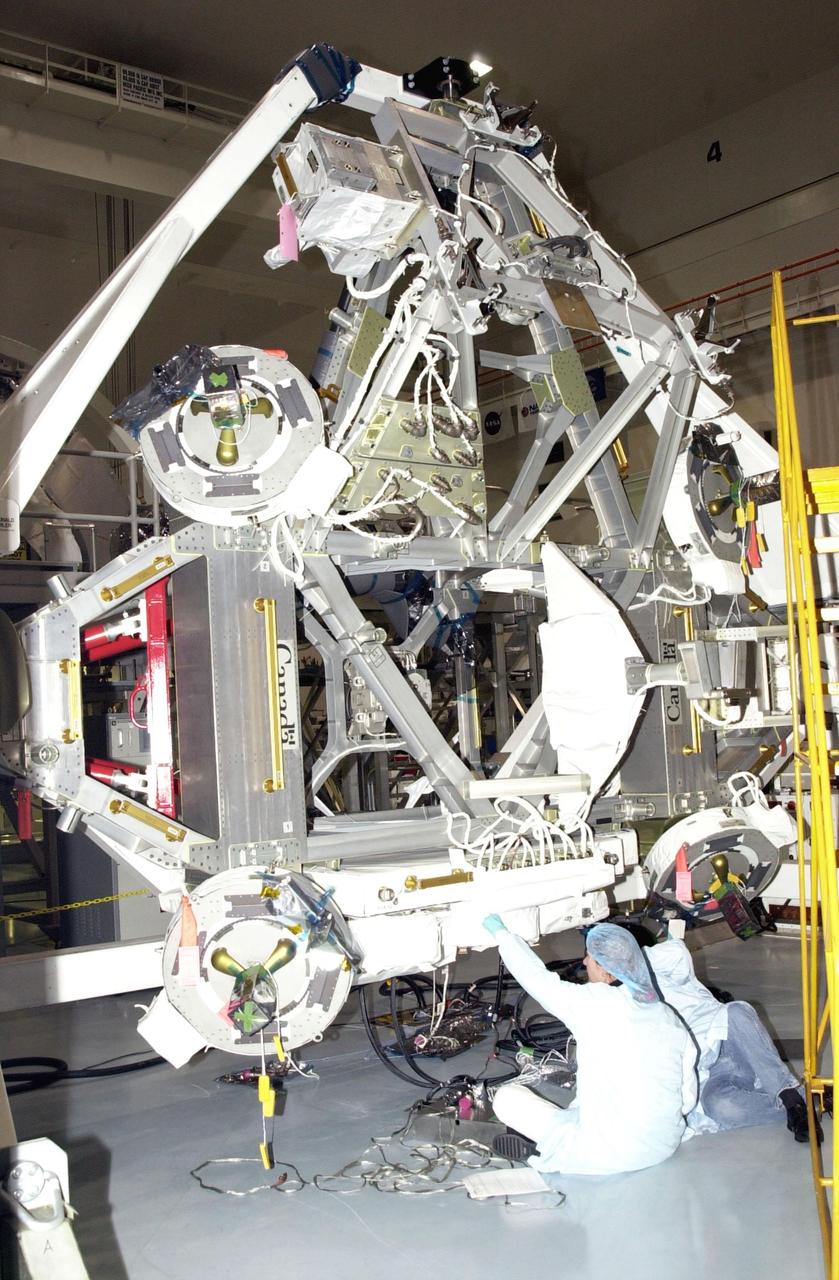
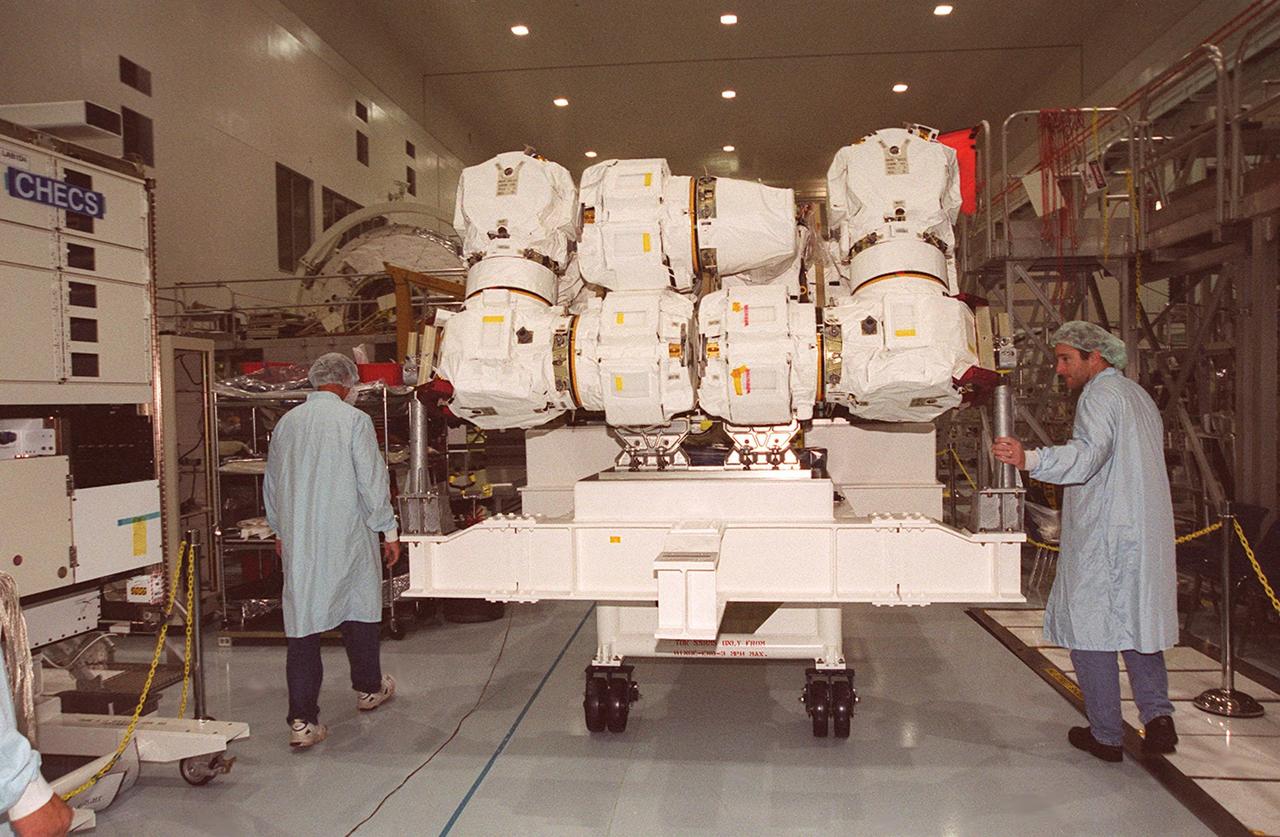
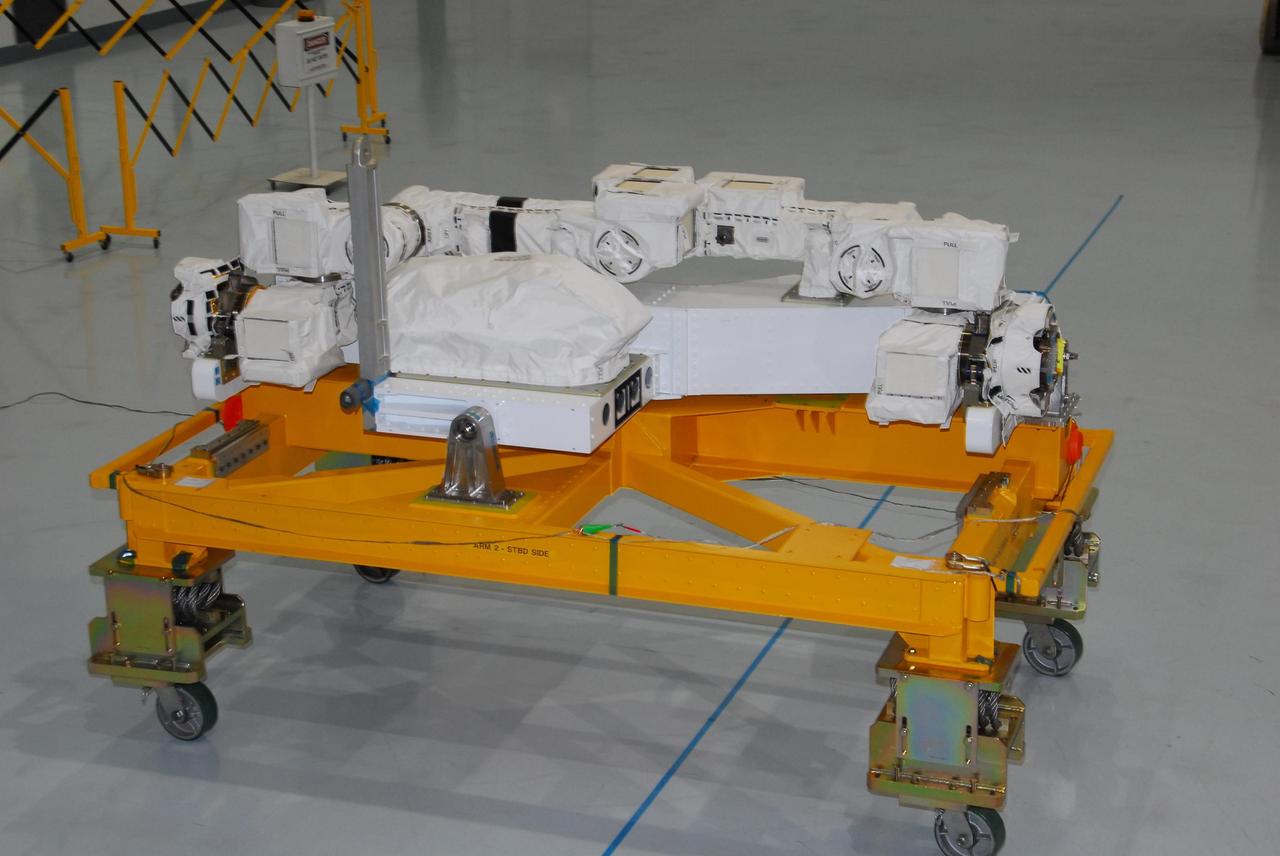
KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), rests on supports in the Space Station Processing Facility. The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

Earth observation taken by the Expedition 35 crew aboard the ISS. The Moon and Canadarm2 Space Station Remote Manipulator System (SSRMS) are in view.

STS111-E-5142 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.

STS111-E-5139 (10 June 2002) --- Backdropped by the blackness of space and Earth’s horizon, the Mobile Remote Servicer Base System (MBS) is moved by the Canadarm2 for installation on the International Space Station (ISS). Astronauts Peggy A. Whitson, Expedition Five flight engineer, and Carl E. Walz, Expedition Four flight engineer, attached the MBS to the Mobile Transporter on the S0 (S-zero) Truss at 8:03 a.m. (CDT) on June 10, 2002. The MBS is an important part of the station’s Mobile Servicing System, which will allow the station’s robotic arm to travel the length of the station to perform construction tasks.

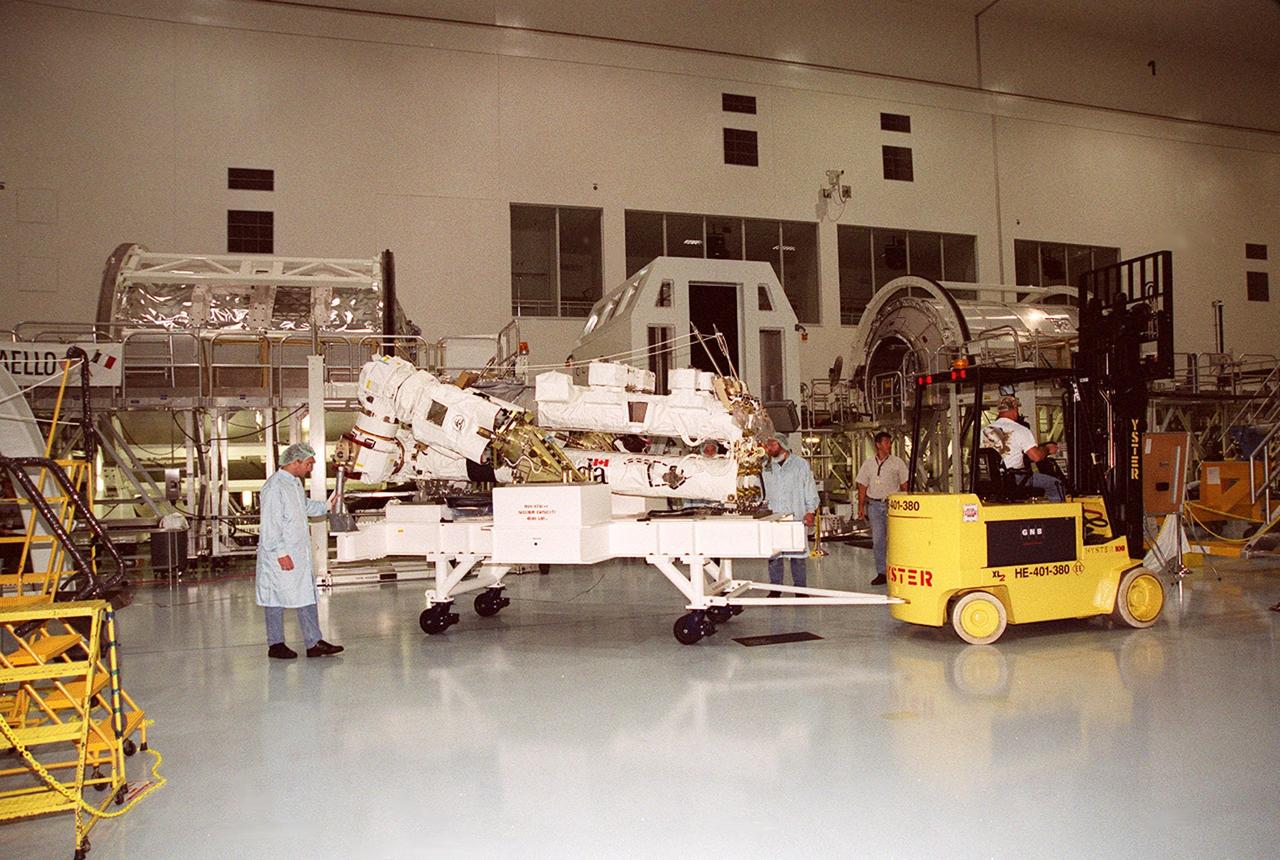
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility oversee the move of the Mobile Remote Servicer Base System (MBS) from the transporter that brought it to KSC. The MBS is part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). The MBS is scheduled to be launched in February 2002 on flight UF-2 to the International Space Station. The MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
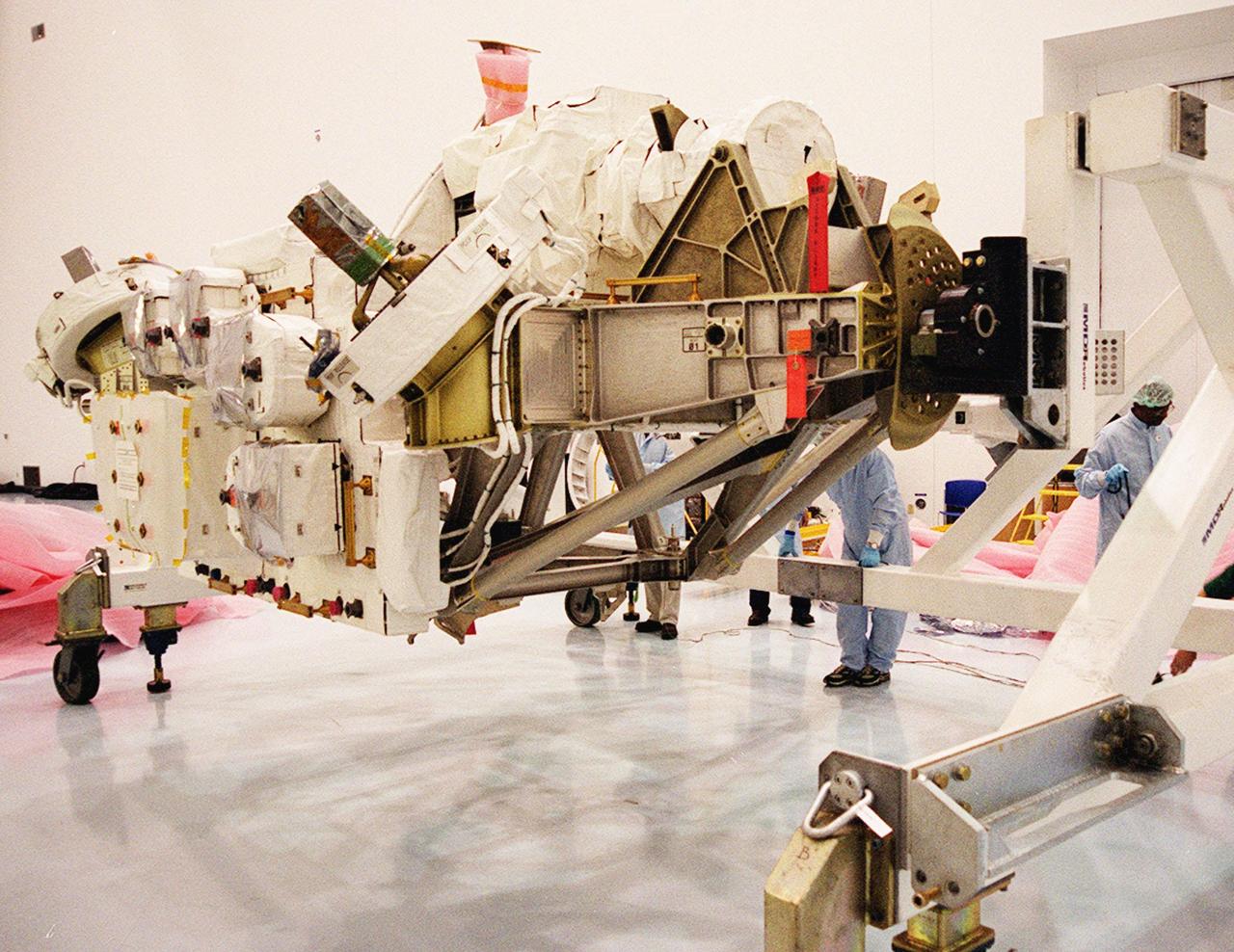
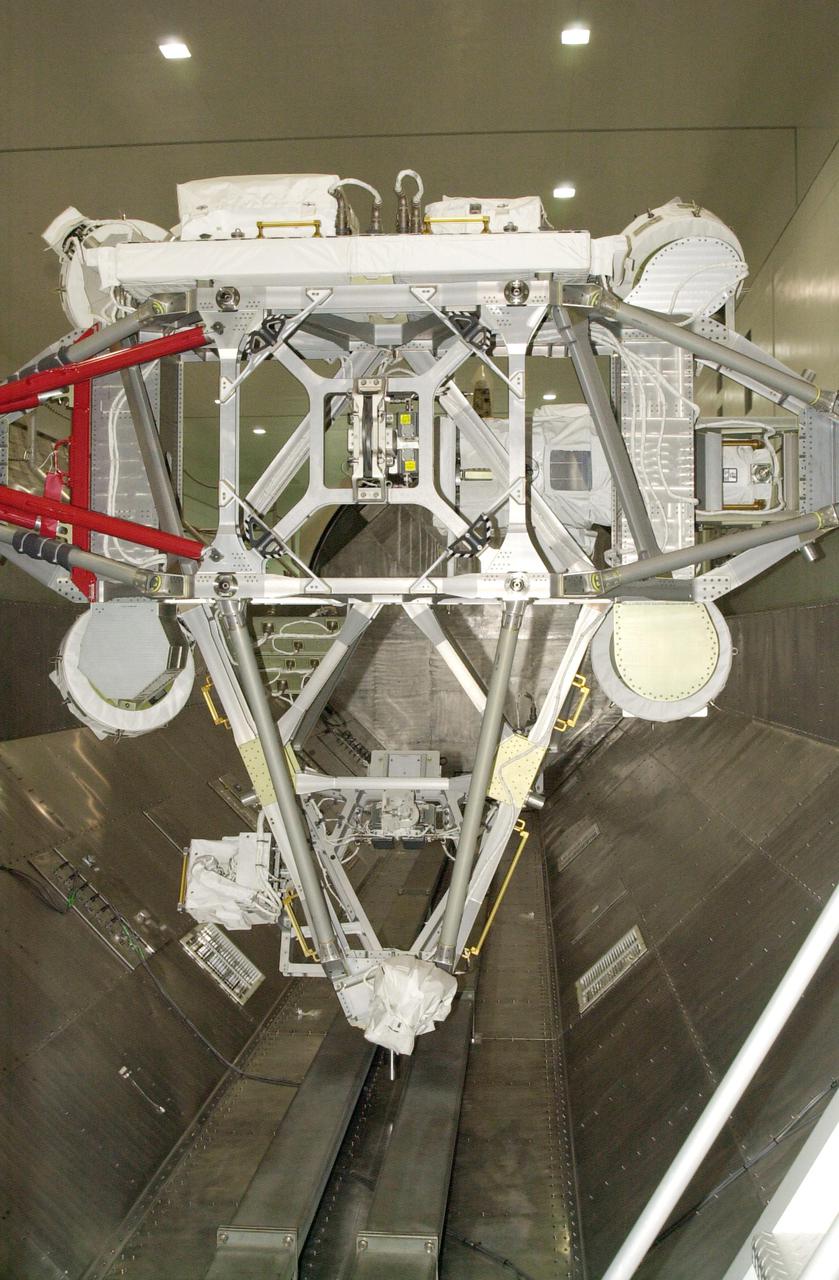
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station
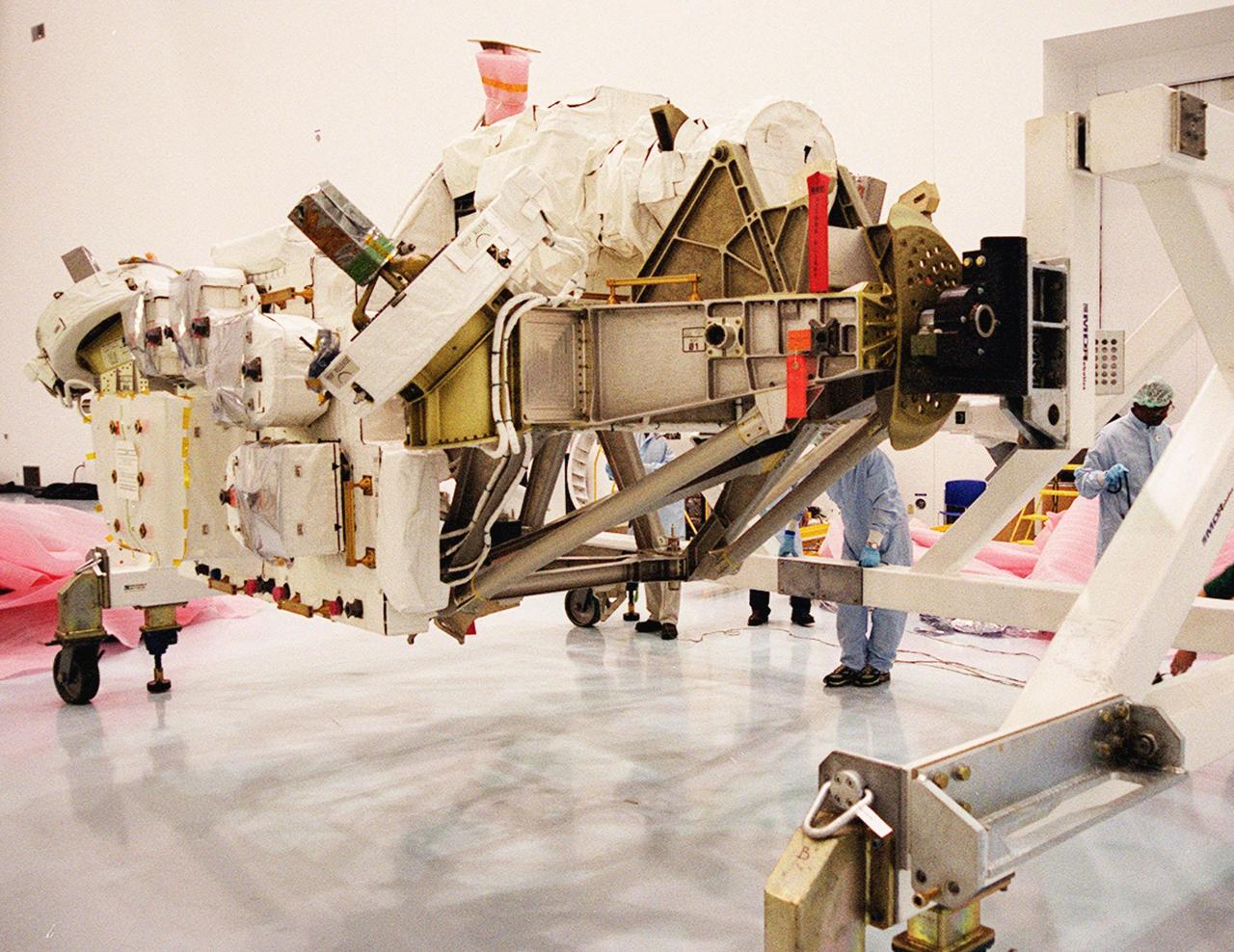
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the left right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, the Mobile Remote Servicer Base System (MBS) is viewed from the front right side. The MBS is part of the Canadian Space Agency’s (CSA) Space Station Remote Manipulator System (SSRMS), known as the Canadian arm. Scheduled to be launched in February 2002 on flight UF-2 to the International Space Station, the MBS will complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites on the Space Station

View of the SpaceX Dragon Commercial Resupply Services-3 (CRS-3) spacecraft grappled by the Canadarm2 Space Station Remote Manipulator System (SSRMS) during Expedition 39. Image was released by released by flight engineer 3 (FE3) on Instagram.

KENNEDY SPACE CENTER, FLA. - Employees at KSC walk alongside orbiter Endeavour as it rolls to the Vehicle Assembly Building. In the VAB it will be mated to the External Tank/Solid Rocket Boosters atop the Mobile Launcher Platform. Endeavour is targeted to launch May 30, 2002, on mission STS-111 to the International Space Station. Mission goals include delivering and installing the Mobile Base System to complete the Canadian Mobile Service System and carrying the Expedition 5 crew to the Station for rotation with Expedition 4

KENNEDY SPACE CENTER, FLA. -- Orbiter Endeavour rolls toward the open bay door of the Vehicle Assembly Building where it will be mated to the External Tank_Solid Rocket Boosters atop the Mobile Launcher Platform. Endeavour is targeted to launch May 30, 2002, on mission STS-111 to the International Space Station. Mission goals include delivering and installing the Mobile Base System to complete the Canadian Mobile Service System and carrying the Expedition 5 crew to the Station for rotation with Expedition 4

KENNEDY SPACE CENTER, FLA. -- Orbiter Endeavour is rolled out of the Orbiter Processing Facility atop a transporter. The orbiter is being moved to the Vehicle Assembly Building for mating to the External Tank/Solid Rocket Boosters atop the Mobile Launcher Platform. Endeavour is targeted to launch May 30, 2002, on mission STS-111 to the International Space Station. Mission goals include delivering and installing the Mobile Base System to complete the Canadian Mobile Service System and carrying the Expedition 5 crew to the Station for rotation with Expedition 4

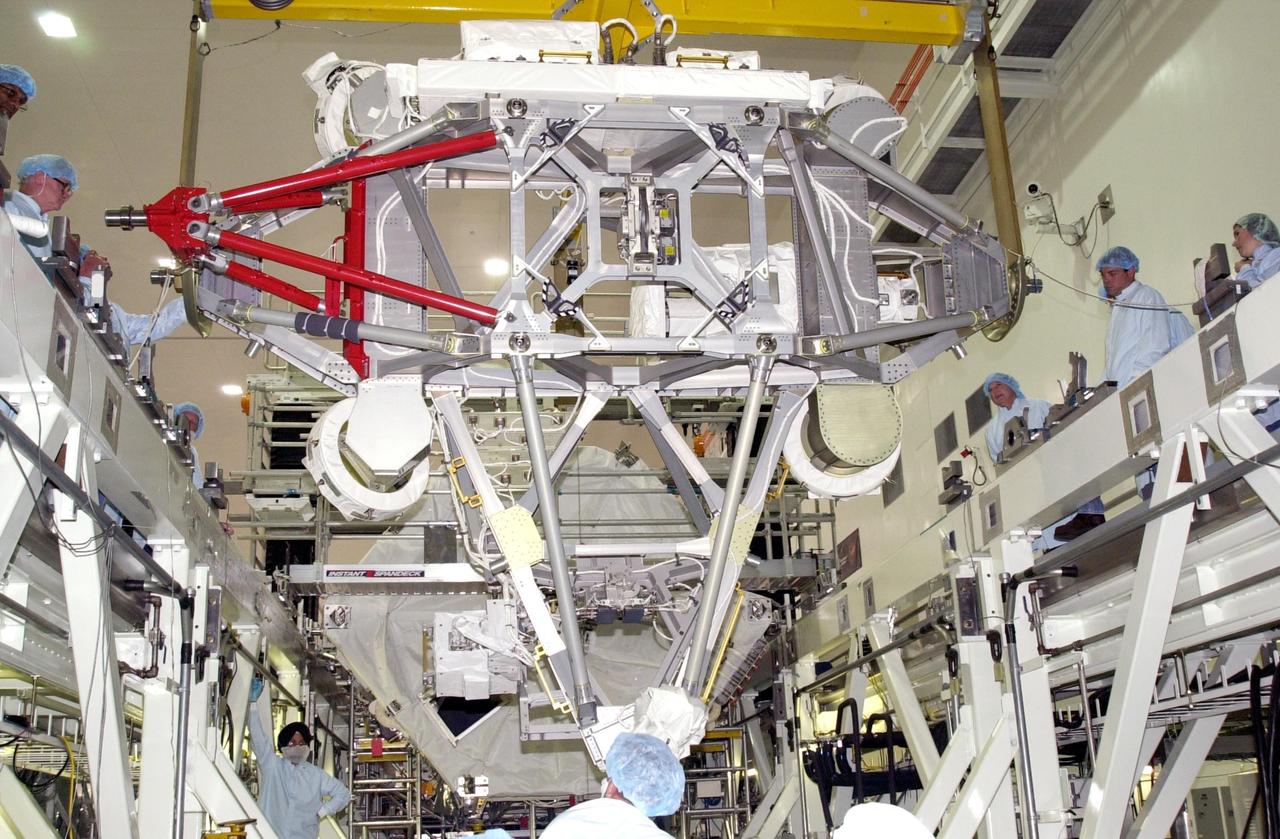
KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), is moved inside the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives at the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

ISS010-E-12589 (6 January 2005) --- Astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, participates in a training session with the Mobile Service System (MSS) Rack and Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS010-E-24985 (19 April 2005) --- Astronaut John L. Phillips, Expedition 11 NASA ISS science officer and flight engineer, participates in a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).

ISS010-E-12590 (6 January 2005) --- Astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, participates in a training session with the Mobile Service System (MSS) Rack and Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility check out components of over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, overhead cranes begin lifting the Mobile Base System before moving it to the weight and center of gravity stand. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility look over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, overhead cranes lower the Mobile Base System onto the weight and center of gravity stand. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, overhead cranes lower the Mobile Base System onto the weight and center of gravity stand. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, workers keep watch while overhead cranes lift the Mobile Base System before moving it to the weight and center of gravity stand. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility, workers watch while overhead cranes move the Mobile Base System to the weight and center of gravity stand. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002
KENNEDY SPACE CENTER, FLA. - In the Space Station Processing Facility, the payload carrier with the Mobile Base System is lowered into the payload canister. On mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility look over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002

KENNEDY SPACE CENTER, FLA. -- The Mobile Base System is prepared for lifting to move to the weight and center of gravity stand in the Space Station Processing Facility. Part of the payload on mission STS-111 to the International Space Station, the MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 31, 2002
KENNEDY SPACE CENTER, FLA. -- Workers in the Space Station Processing Facility check out components of over the Mobile Base System (MBS), part of the payload on mission STS-111 to the International Space Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. STS-111 is the second utilization flight (UF-2) to the Space Station and will also carry the Expedition 5 crew to replace Expedition 4. Launch is scheduled for May 2, 2002
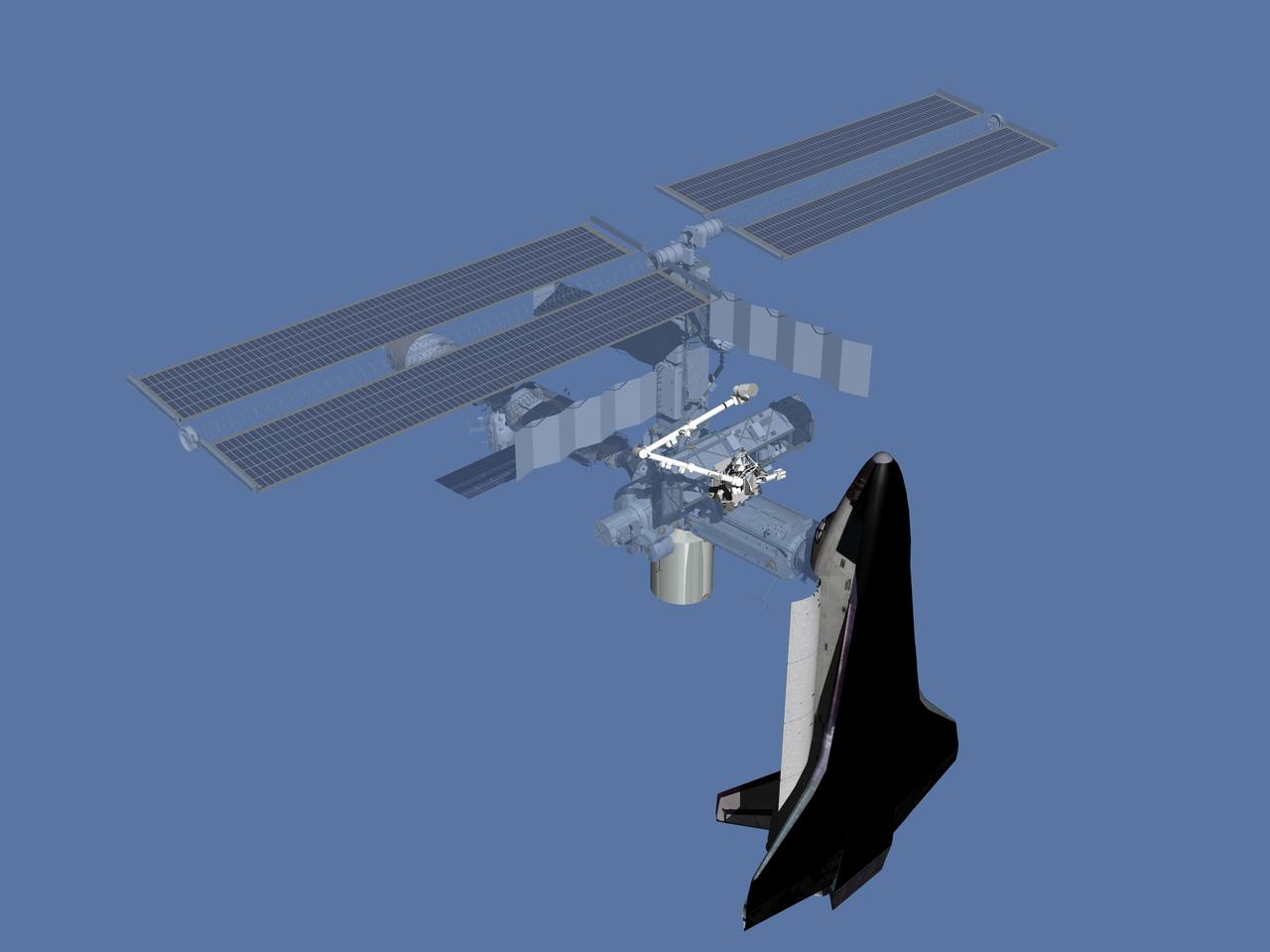
JSC2006-E-43493 (June 2002) --- Computer-generated artist's rendering of the International Space Station after flight STS-111/UF2. Space Shuttle Endeavour; with a Multi-Purpose Logistics Module (MPLM); delivered more payload and experiment racks to the Destiny laboratory. The Mobile Base System was also installed completing the station's Mobile Servicing System.

iss068e02492 (Nov. 21, 2022) --- The International Space Station's fine-tuned robotic hand, the Special Purpose Dexterous Manipulator (SPDM), also known as Dextre, is pictured attached to the U.S. Destiny laboratory module as the orbiting lab flew 270 miles above the southern Pacific Ocean. Dextre is part of the station's Mobile Servicing System, also comprised of the Canadarm2 robotic arm and the Mobile Base System, provided by the Canadian Space Agency.
The Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” (at right) arrives at a pallet in the Space Station Processing Facility where it will undergo testing once in place. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001

KENNEDY SPACE CENTER, FLA. - STS-111 Pilot Paul Lockhart waits for his helmet during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Lockhart's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. - STS-111 Mission Specialist Philippe Perrin (CNES) smiles during suitup for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Perrin's first Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. - STS-111 Commander Kenneth Cockrell suits up for the scheduled liftoff of Space Shuttle Endeavour at 7:44 p.m. EDT. This is Cockrell's fifth Shuttle flight. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. In addition, Expedition 5 is traveling on mission STS-111 to the International Space Station to replace the current resident crew, Expedition 4, who will return to Earth with the STS-111 crew

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, looks over equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, practices using equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, looks over equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, looks over equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, practices using equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, looks over equipment in the Space Station Processing Facility. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002
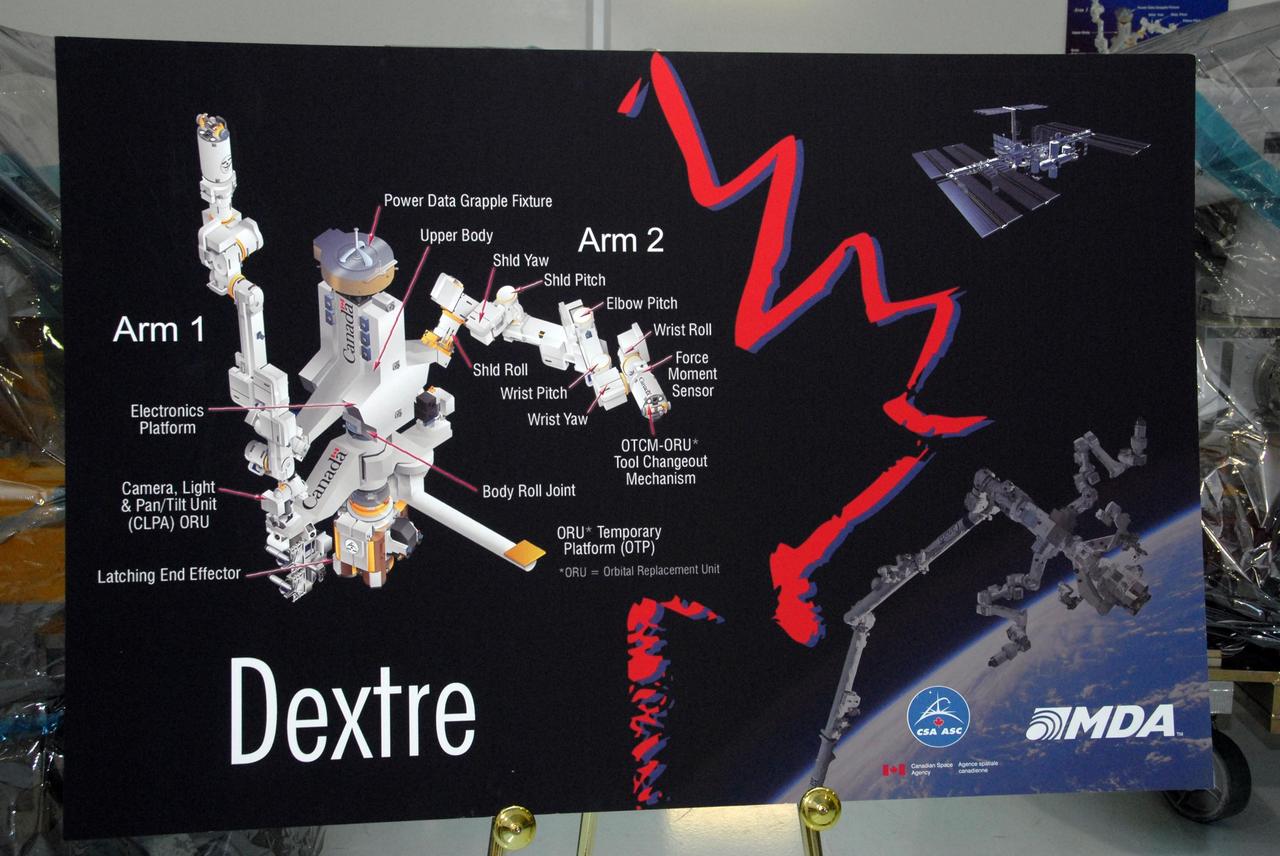
KENNEDY SPACE CENTER, FLA. -- A poster in the Space Station Processing Facility, or SSPF, at NASA's Kennedy Space Center illustrates the assembled Dextre, the third and final component of the mobile servicing system on the International Space Station. The Special Purpose Dexterous Manipulator will work with the mobile base and Canadarm2 on the station to perform critical construction and maintenance tasks. The poster sits in front of the draped sections in the SSPF. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14, 2008. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- With the Multi-Purpose Logistics Module Leonardo installed in Endeavour, one of the payload bay doors (left) has been closed. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002
KENNEDY SPACE CENTER, FLA. -- Workers at Launch Pad 39A check the fittings on the payload bay of Endeavour before the bay doors close. The view is looking down into the payload bay. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Inside the Orbiter Processing Facility, spectators watch as Endeavour is rolled out of the bay on top of a transporter. The orbiter is being moved to the Vehicle Assembly Building for mating to the External Tank/Solid Rocket Boosters atop the Mobile Launcher Platform. Endeavour is targeted to launch May 30, 2002, on mission STS-111 to the International Space Station. Mission goals include delivering and installing the Mobile Base System to complete the Canadian Mobile Service System and carrying the Expedition 5 crew to the Station for rotation with Expedition 4.

KENNEDY SPACE CENTER, FLA. - At Launch Pad 39A, Multi-Purpose Logistics Module Leonardo is ready for installation into Endeavour's payload bay for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002
KENNEDY SPACE CENTER, FLA. -- The Multi-Purpose Logistics Module Leonardo (bottom of photo) is being installed in Endeavour's payload bay for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist_roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Orbiter Endeavour sits in the transfer aisle of the Vehicle Assembly Building after rolling over from the Orbiter Processing Facility. After lifting, Endeavour will be mated to the External Tank/Solid Rocket Boosters atop the Mobile Launcher Platform. Endeavour is targeted to launch May 30, 2002, on mission STS-111 to the International Space Station. Mission goals include delivering and installing the Mobile Base System to complete the Canadian Mobile Service System and carrying the Expedition 5 crew to the Station for rotation with Expedition 4

KENNEDY SPACE CENTER, FLA. -- The remaining payload bay door begins to close. Visible is the Multi-Purpose Logistics Module Leonardo, last to be installed in Endeavour. The Shuttle is poised for launch on mission STS-111, Utilization Flight 2, carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002.
KENNEDY SPACE CENTER, FLA. - With the SPACEHAB and Hitchhiker payloads already installed, Endeavour's payload bay is ready for installation of the Multi-Purpose Logistics Module Leonardo for mission STS-111. The mission, known as Utilization Flight 2, is carrying supplies and equipment to the International Space Station. The payload includes the Multi-Purpose Logistics Module Leonardo, the Mobile Base System, which will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, and a replacement wrist/roll joint for Canadarm 2. Also part of the mission, Expedition 5 will travel to the Station as the replacement crew for Expedition 4, who will return to Earth aboard the orbiter. Launch is scheduled for May 30, 2002
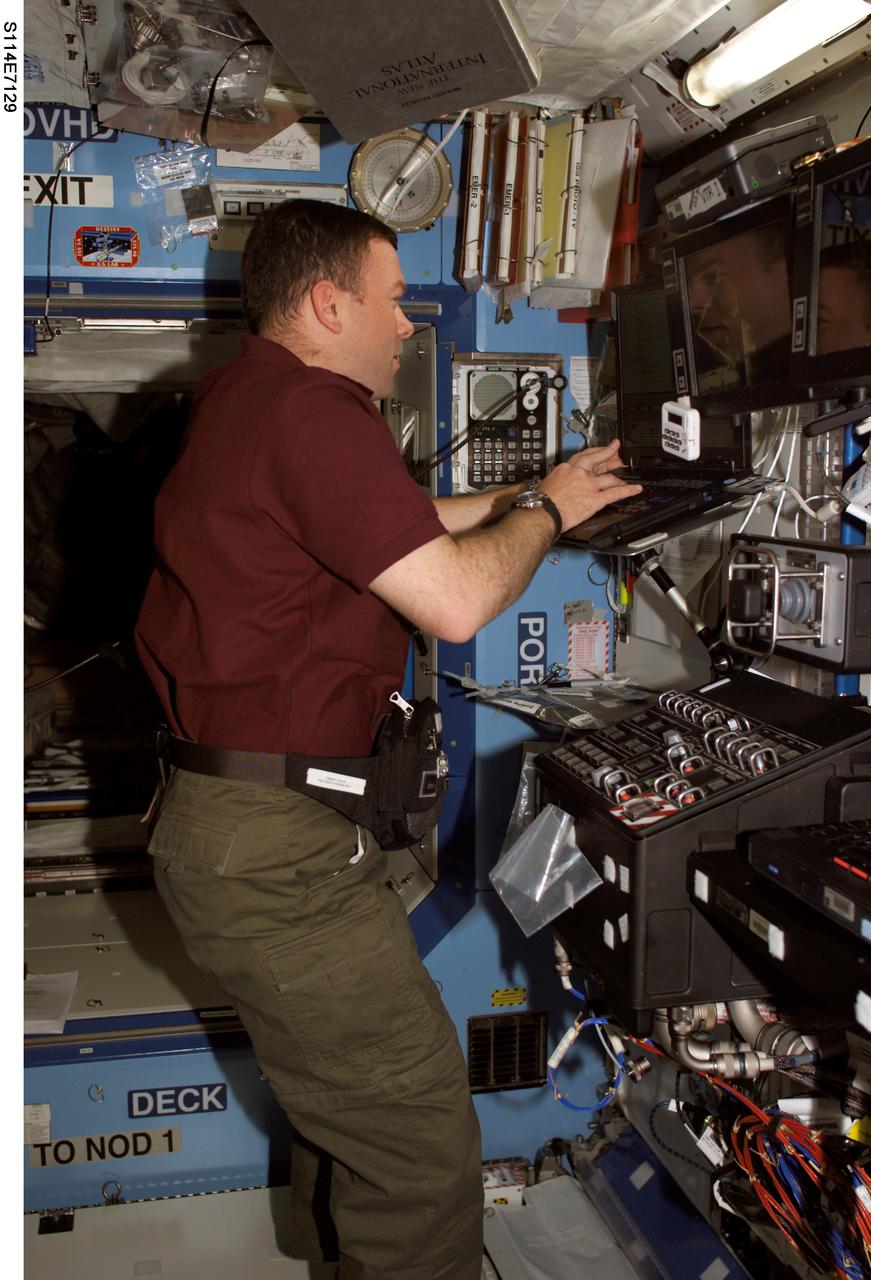
S114-E-7129 (5 August 2005) --- Astronaut James M. Kelly, STS-114 pilot, works with the Mobile Service System (MSS) and Canadarm2 controls in the Destiny laboratory of the International Space Station while Space Shuttle Discovery was docked to the Station.

S121-E-06464 (12 July 2006) --- Astronaut Lisa M. Nowak, STS-121 mission specialist, works with the Mobile Service System (MSS) and Canadarm2 controls in the Destiny laboratory of the International Space Station while Space Shuttle Discovery was docked to the station.

S121-E-07694 (15 July 2006) --- Astronaut Stephanie D. Wilson, STS-121 mission specialist, works with the Mobile Service System (MSS) and Canadarm2 controls in the Destiny laboratory of the International Space Station while Space Shuttle Discovery was docked to the station.

S114-E-7150 (5 August 2005) --- Astronauts Eileen M. Collins (foreground) and James M. Kelly, STS-114 commander and pilot, respectively, work with the Mobile Service System (MSS) and Canadarm2 controls in the Destiny laboratory of the International Space Station while Space Shuttle Discovery was docked to the Station.

View of the Canadarm2 Space Station Remote Manipulator System (SSRMS) Latching End Effector (LEE) taken against a backdrop of Earth and space during Expedition 35.

KENNEDY SPACE CENTER, FLA. - The Expedition 5 crew - Commander Valeri Korzun (left), Sergei Treschev (center) and Peggy Whitson (right) - are in the slidewire basket and ready to exit the Fixed Service Structure on Launch Pad 39A. They and the STS-111 crew are taking part in Terminal Countdown Demonstration Test activities, which include emergency egress training and a simulated launch countdown. Mission STS-111 is Utilization Flight 2, carrying equipment and supplies in the Multi-Purpose Logistics Module Leonardo to the International Space Station, plus the Mobile Base System (MBA) and an Orbital Replacement Unit. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS, enabling Canadarm 2 to 'inchworm' from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. The Expedition 5 crew is traveling on Endeavour to replace the Expedition 4 crew on the Station. Launch of Endeavour is scheduled for May 30, 2002
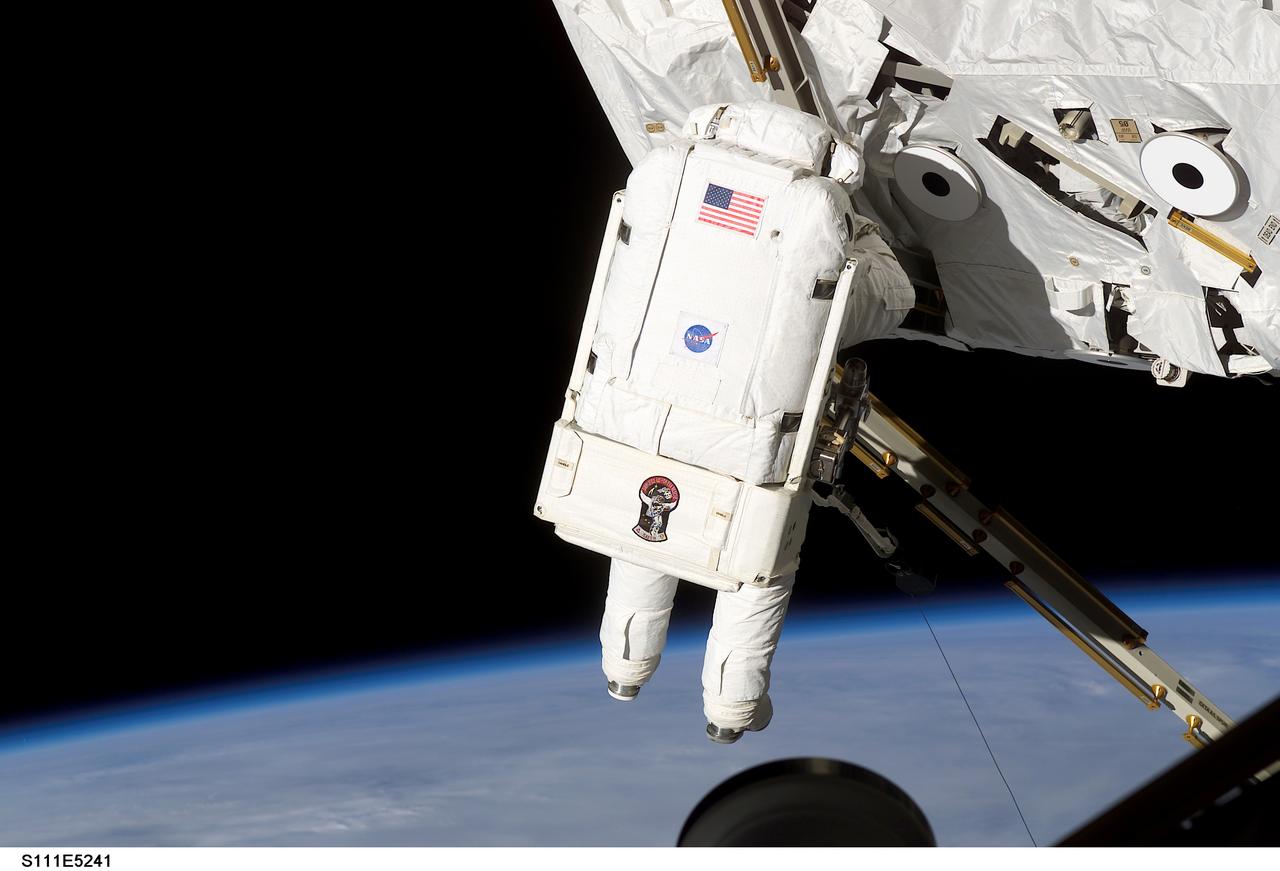
STS111-E-5241 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, photographed near the S0 (S-Zero) Truss on the International Space Station (ISS), participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Perrin and Chang-Diaz completed installation of the Mobile Remote Servicer Base System (MBS) on the station’s railcar, the Mobile Transporter. Perrin represents CNES, the French Space Agency.

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, points to a part of the equipment she is using as part of familiarization for the mission. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to 'inchworm' from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

KENNEDY SPACE CENTER, FLA. -- Astronaut Peggy Whitson, a member of the Expedition 5 crew, points to a part of the equipment she is using as part of familiarization for the mission. She and other crew members Commander Valeri Korzun and Sergei Treschev will be traveling to the International Space Station on mission STS-111 and will be replacing the Expedition 4 crew. Part of the payload on STS-111 will be the Mobile Base System, to be installed installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab fixture to the MSS and travel along the Truss to work sites. STS-111 is scheduled to launch in May 2002

ISS011-E-09827 (29 June 2005) --- Cosmonaut Sergei K. Krikalev, Expedition 11 commander representing Russia's Federal Space Agency, works with the Canadarm2 and the Mobile Service System (MSS) in the Destiny laboratory of the International Space Station.
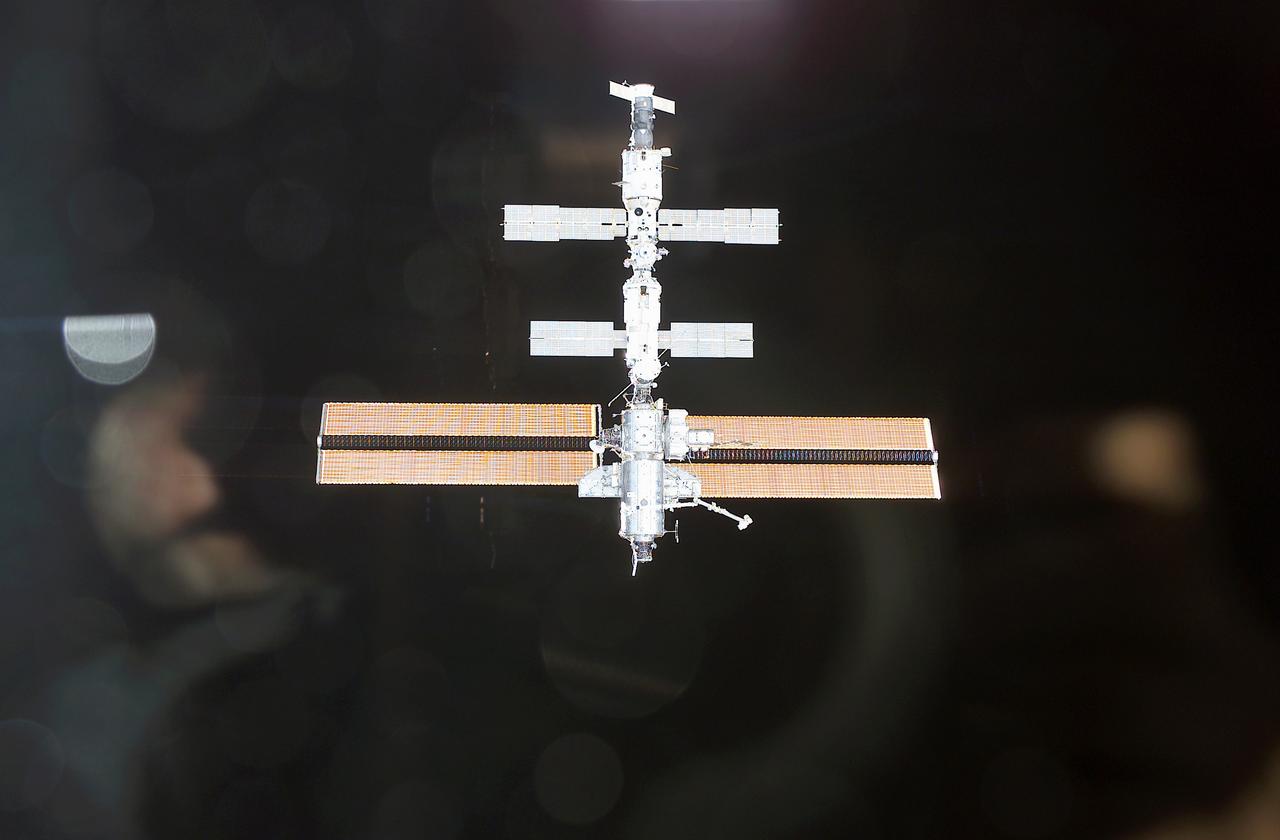
Backdropped against the blackness of space is the International Space Station (ISS), as viewed from the approching Space Shuttle Orbiter Endeavour, STS-111 mission, in June 2002. Expedition Five replaced Expedition Four crew after remaining a record-setting 196 days in space. Three spacewalks enabled the STS-111 crew to accomplish the delivery and installation of the Mobile Remote Servicer Base System (MBS), an important part of the Station's Mobile Servicing System that allows the robotic arm to travel the length of the Station, which is necessary for future construction tasks; the replacement of a wrist roll joint on the Station's robotic arm, and the task of unloading supplies and science experiments from the Leonardo Multi-Purpose Logistics Module, which made its third trip to the orbital outpost. The STS-111 mission, the 14th Shuttle mission to visit the ISS, was launched on June 5, 2002 and landed June 19, 2002.

ISS013-E-84251 (23 Sept. 2006) --- Astronaut Michael E. Lopez-Alegria (foreground), Expedition 14 commander and NASA space station science officer, participates in a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station. Astronaut Jeffrey N. Williams, Expedition 13 NASA space station science officer and flight engineer, assisted Lopez-Alegria.

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- The Mobile Remote Servicer Base System (MBS), part of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS), arrives by truck at Kennedy Space Center. It is being taken to the Space Station Processing Facility. The SSRMS is part of the payload on mission STS-100, the ninth flight to the International Space Station

KENNEDY SPACE CENTER, FLA. -- After rollback of the Rotating Service Structure in the early morning hours, Space Shuttle Endeavour sits bathed in light on its Mobile Launcher Platform on Launch Pad 39A. Seen extending to the cockpit area of Endeavour is the orbiter access arm. At the end of the arm is the White Room, an environmental chamber. Below, on either side of Endeavour's tail, are the tail service masts that support fluid, gas and electrical requirements of the orbiter's liquid oxygen and liquid hydrogen aft T-0 umbilicals. STS-111 is the second Utilization Flight to the International Space Station, carrying the Multi-Purpose Logistics Module Leonardo, the Mobile Base System (MBS), and a replacement wrist/roll joint for the Canadarm 2. Also onboard Space Shuttle Endeavour is the Expedition 5 crew who will replace Expedition 4 on board the Station. The MBS will be installed on the Mobile Transporter to complete the Canadian Mobile Servicing System, or MSS. The mechanical arm will then have the capability to "inchworm" from the U.S. Lab Destiny to the MSS and travel along the truss to work sites. Expedition 4 crew members will return to Earth with the STS-111 crew on Endeavour. Launch is scheduled for 7:44 p.m. EDT, May 30, 2002

STS111-E-5238 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.

STS111-E-5183 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
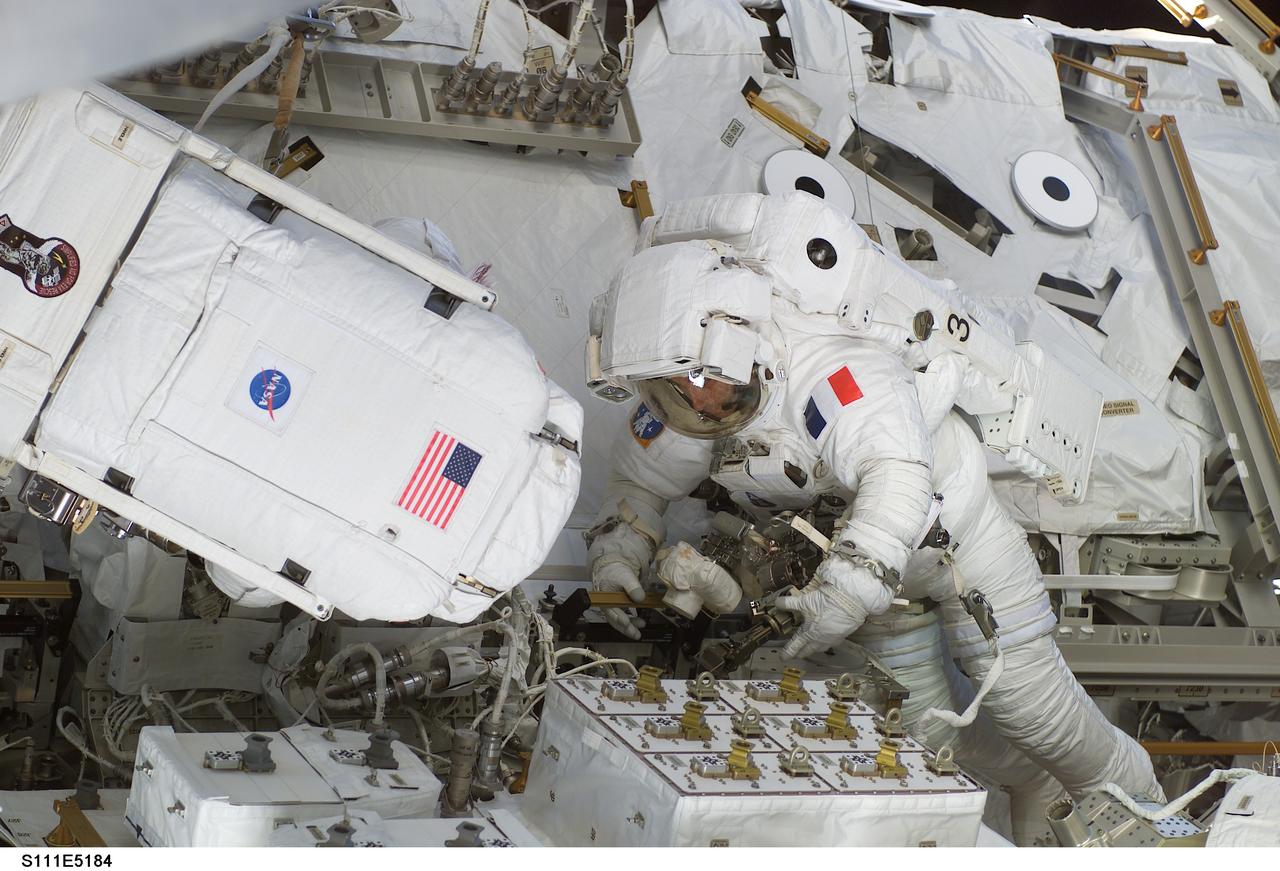
STS111-E-5184 (11 June 2002) --- Astronauts Franklin R. Chang-Diaz (left) and Philippe Perrin, both mission specialists, work on the Mobile Remote Servicer Base System (MBS) and the Mobile Transporter on the International Space Station (ISS) during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. The boxes in front of the spacewalkers are the Canadian Remote Power Control Modules (RPCM). The S0 (S-zero) Truss is partially visible in the background. Perrin represents CNES, the French Space Agency.
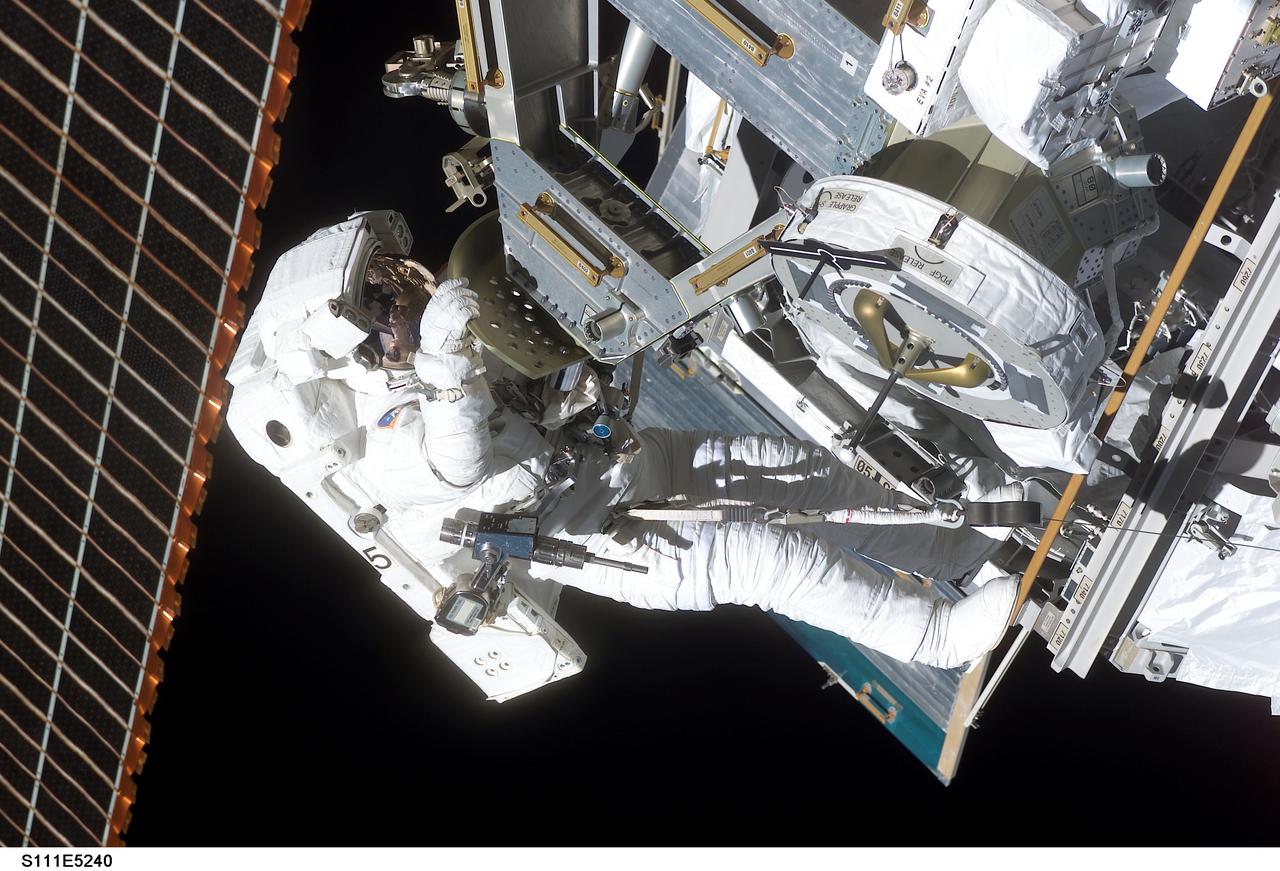
STS111-E-5240 (11 June 2002) --- Astronaut Philippe Perrin, STS-111 mission specialist, works on the installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter, during the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. Perrin represents CNES, the French Space Agency.

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves nearer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves closer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister at right for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, an overhead crane moves the Special Purpose Dexterous Manipulator, known as Dextre, to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

ISS008-E-22137 (24 April 2004) --- Cosmonaut Gennady I. Padalka (foreground), Expedition 9 commander, and astronaut Edward M. (Mike) Fincke, NASA ISS science officer and flight engineer, participate in a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS). Padalka represents Russia’s Federal Space Agency.

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is moved across the facility. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians help guide the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, into place for installation on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians aid with the lowering of the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, toward the base. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is ready to be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station ISS. Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is lowered toward the base for installation. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, is moved toward the base, in the background. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians help guide the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, into place for installation on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station (ISS). Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, technicians begin raising the starboard arm of the Special Purpose Dexterous Manipulator, known as Dextre, for its move across the facility. The arm will be installed on the base. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station ISS. Along with Canadarm2, whose technical name is the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System, or MSS. The three components have been designed to work together or independently. Dextre is part of the payload scheduled on mission STS-123, targeted to launch Feb. 14. Photo credit: NASA/George Shelton

KENNEDY SPACE CENTER, FLA. -- In the Orbiter Processing Facility, STS-111 Mission Specialists Franklin Chang-Diaz (center) and Phillippe Perrin (right) check equipment with a trainer (left) in orbiter Endeavour. Perrin is with the French Space Agency (CNES). Perrin and Chang-Diaz, with other crew members, are taking part in a Crew Equipment Interface Test in preparation for launch. Mission STS-111 will carry to the International Space Station the Multipurpose Logistics Module (MPLM), filled with experiment racks and three stowage and resupply racks, and the Mobile Base System (MBS), which will attach to the Mobile Transporter and complete the Canadian Mobile Servicing System, or MSS. The Station's mechanical arm will then have the capability to "inchworm" from the U.S. Lab to the MSS and travel along the truss to work sites on the Station. Launch of Endeavour on mission STS-111 is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility, STS-111 Mission Specialists Franklin Chang-Diaz (center) and Phillippe Perrin (right) look over equipment with a trainer (left) in orbiter Endeavour. Perrin is with the French Space Agency (CNES). Perrin and Chang-Diaz, with other crew members, are taking part in a Crew Equipment Interface Test in preparation for launch. Mission STS-111 will carry to the International Space Station the Multipurpose Logistics Module (MPLM), filled with experiment racks and three stowage and resupply racks, and the Mobile Base System (MBS), which will attach to the Mobile Transporter and complete the Canadian Mobile Servicing System, or MSS. The Station's mechanical arm will then have the capability to 'inchworm' from the U.S. Lab to the MSS and travel along the truss to work sites on the Station. Launch of Endeavour on mission STS-111 is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- Members of the STS-111 crew (dressed in green) look over equipment in the payload bay of Endeavour. The crew comprises Commander Kenneth Cockrell, Pilot Paul Lockhart and Mission Specialists Franklin Chang-Diaz and Phillipe Perrin, who is with the French Space Agency (CNES). The crew is taking part in a Crew Equipment Interface Test in preparation for launch. Mission STS-111 will carry to the International Space Station the Multipurpose Logistics Module (MPLM), filled with experiment racks and three stowage and resupply racks, and the Mobile Base System (MBS), which will attach to the Mobile Transporter and complete the Canadian Mobile Servicing System, or MSS. The Station's mechanical arm will then have the capability to "inchworm" from the U.S. Lab to the MSS and travel along the truss to work sites on the Station. Launch of Endeavour on mission STS-111 is scheduled for May 30, 2002

KENNEDY SPACE CENTER, FLA. -- In the Orbiter Processing Facility, STS-111 Mission Specialists Phillippe Perrin (left) and Franklin Chang-Diaz (right) check equipment for their mission. Perrin is with the French Space Agency (CNES). Perrin and Chang-Diaz, with other crew members, are taking part in a Crew Equipment Interface Test in preparation for launch. Mission STS-111 will carry to the International Space Station the Multipurpose Logistics Module (MPLM), filled with experiment racks and three stowage and resupply racks, and the Mobile Base System (MBS), which will attach to the Mobile Transporter and complete the Canadian Mobile Servicing System, or MSS. The Station's mechanical arm will then have the capability to "inchworm" from the U.S. Lab to the MSS and travel along the truss to work sites on the Station. Launch of Endeavour on mission STS-111 is scheduled for May 30, 2002

STS111-E-5226 (11 June 2002) --- Astronaut Franklin R. Chang-Diaz, STS-111 mission specialist, participates in the second scheduled session of extravehicular activity (EVA) for the STS-111 mission. During the 5-hour spacewalk, Chang-Diaz and Perrin completed installation of the Mobile Remote Servicer Base System (MBS) on the International Space Station’s (ISS) railcar, the Mobile Transporter.
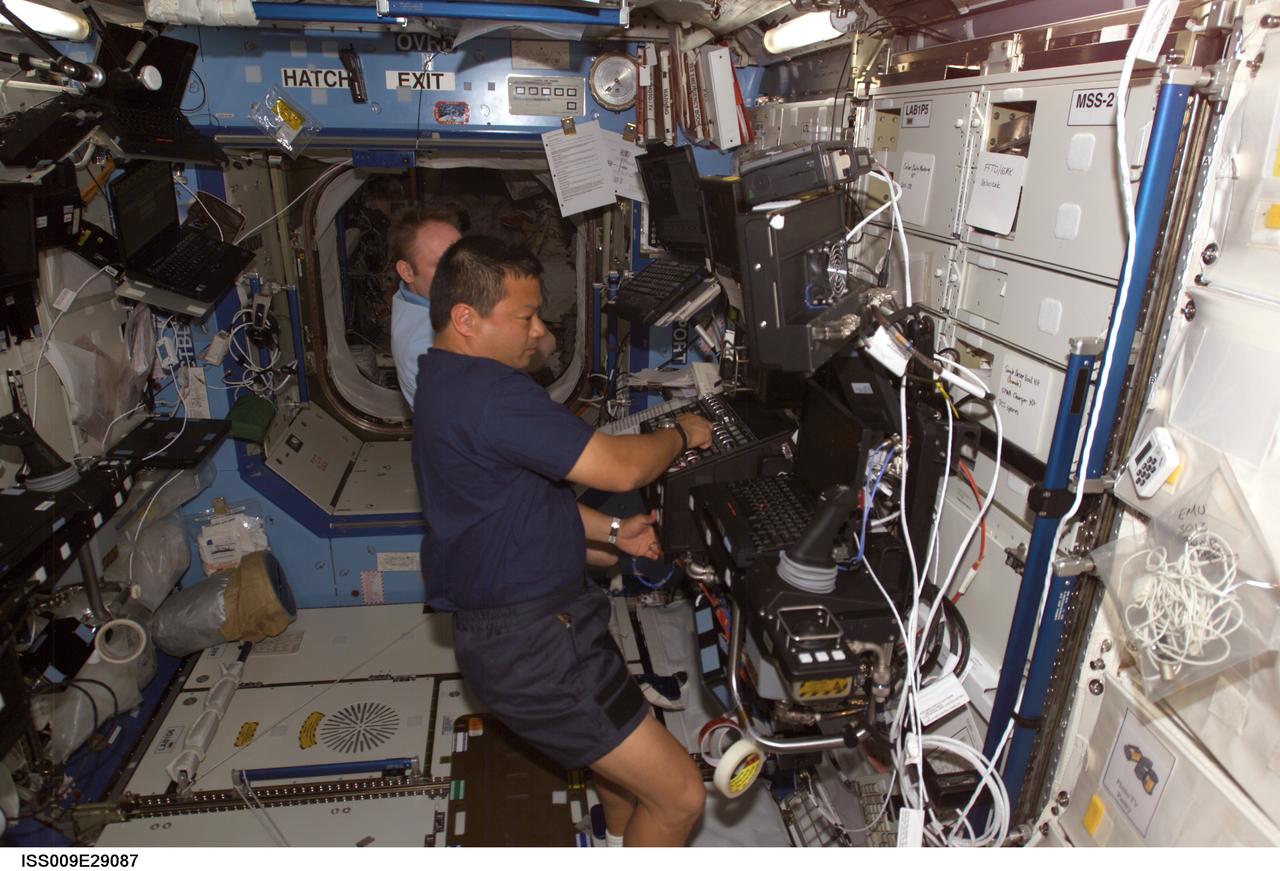
ISS009-E-29087 (18 October 2004) --- Astronaut Edward M. (Mike) Fincke (partially obscured), Expedition 9 NASA ISS science officer and flight engineer, takes astronaut Leroy Chiao, Expedition 10 commander and NASA ISS science officer, through a familiarization session with the Mobile Service System (MSS) and hands-on experience with the Canadarm2, or Space Station Remote Manipulator System (SSRMS) in the Destiny laboratory of the International Space Station (ISS).