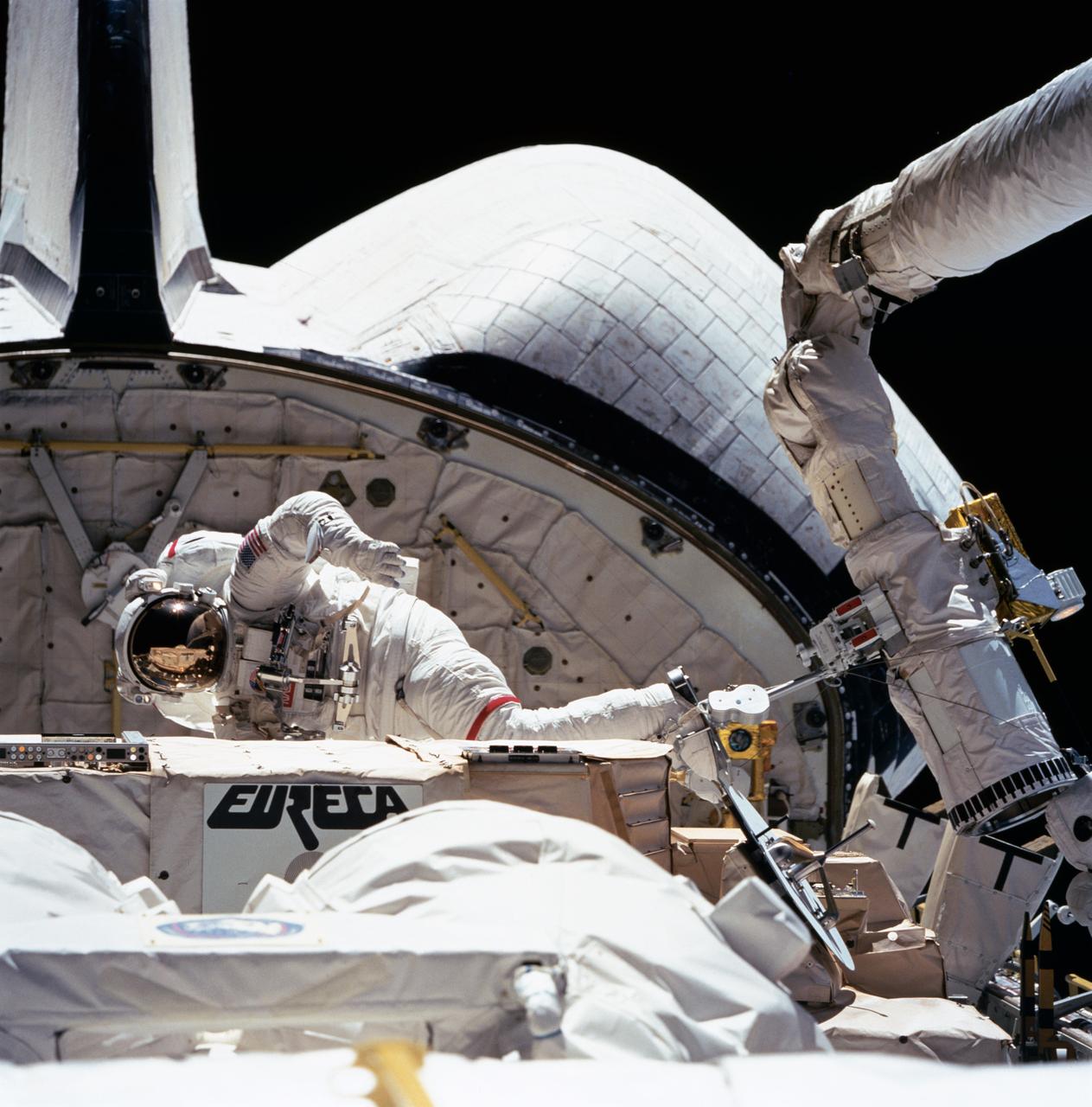
The darkness of space forms the backdrop for this extravehicular activity (EVA) scene captured by one of the STS-57 crewmembers in Endeavour's, Orbiter Vehicle (OV) 105's, crew cabin. Pictured near the recently "captured" European Retrievable Carrier (EURECA) at frame center is Mission Specialist (MS) and Payload Commander (PLC) G. David Low. Suited in an extravehicular mobility unit (EMU), Low, anchored to the remote manipulator system (RMS) via a portable foot restraint (PFR) (manipulator foot restraint (MFR)), is conducting Detailed Test Objective (DTO) 1210 procedures. Specifically, this activity will assist in refining several procedures being developed to service the Hubble Space Telescope (HST) on mission STS-61 in December 1993. The PFR is attached to the RMS end effector via a PFR attachment device (PAD). Partially visible in the foreground is the Superfluid Helium Onorbit Transfer (SHOOT) payload.

STS057-89-042 (24 June 1993) --- Baja California forms the backdrop for this extravehicular activity (EVA) scene captured on 70mm film by one of the STS-57 crew members in the Space Shuttle Endeavour's crew cabin. Working near the recently "captured" European Retrievable Carrier (EURECA) at frame center are astronauts G. David Low (nearest camera) and Peter J. K. (Jeff) Wisoff. Low is attached to a mobile foot restraint to the end of the Canadian-built Remote Manipulator System (RMS) arm. The SPACEHAB module is seen in the foreground and EURECA is partially visible near Endeavour's aft firewall.

STS057-84-000AD (24 June 1993) --- The recently "captured" European Retrievable Carrier (EURECA) was recorded on 70mm film as it was berthed in the Space Shuttle Endeavour's aft cargo bay, assisted by the Canadian-built Remote Manipulator System (RMS), partially visible in upper right. Moments later the RMS eased EURECA into its stowage area between Endeavour's aft cargo bay firewall and the SpaceHab module (partially visible in foreground).

STS057-93-052 (24 June 1993) --- The European Retrievable Carrier (EURECA) is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The photo was taken after EURECA's "capture" from Earth-orbit but prior to its berthing in the Shuttle's cargo bay. The southern two-thirds of the state of Florida, part of the Gulf of Mexico and clouds over the Atlantic form the backdrop for the 70mm image.

S100-E-5018 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5015 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5017 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

S100-E-5002 (20 April 2001) --- One of the crew members of STS-100 aimed a digital still camera through Endeavour's aft flight deck windows to record this image of the cargo bay, backdropped against a scene of black space and Earth's horizon. Housed in the bay, beyond the docking mechanism in the foreground, is the Italian Space Agency-provided Raffaello cargo module, which is carrying several tons of equipment for the Expedition Two crew and racks of hardware for installation in Destiny which will be used for scientific research in the future. Raffaello, which is the second of three such logistics modules, will be berthed to the ISS on April 23 so its contents can be transferred to the station throughout the course of docked operations. Also in the bay is the 57-foot-long Canadarm2, which will be mounted on the Destiny Laboratory for future station assembly work. Endeavour's Canadian-built Remote Manipulator System (RMS) arm can be seen in its berthed position on the port side of the payload bay.

STS057-32-008 (25 June 1993) --- Astronaut G. David Low (nearer camera), his feet anchored to Endeavour's Remote Manipulator System (RMS), lifts fellow astronaut Peter J. K. (Jeff) Wisoff during a special phase of the lengthy June 25, 1993, extravehicular activity (EVA). This phase of the EVA dealt with the simulation of handling large components in space. This particular task was rehearsed with eyes toward the servicing of the Hubble Space Telescope (HST) in the near future or the assembly and maintenance of the International Space Station later. The two mission specialists and four other NASA astronauts spent almost ten days aboard the Space Shuttle Endeavour in Earth-orbit supporting the SPACEHAB mission, retrieving the European Retrievable Carrier (EURECA) and conducting various experiments.

STS057-31-030 (25 June 1993) --- Astronaut Nancy J. Sherlock operates Endeavour's remote manipulator system (RMS) during the June 25 extravehicular activity of two crewmates. At one point, astronaut G. David Low, while his feet were anchored to a special restraint device on the end of the RMS arm, moved about, with Sherlock's aid, while holding astronaut Peter J. K. (Jeff) Wisoff. The activity represented an evaluation of techniques which might be used on planned future missions -- a 1993 servicing visit to the Hubble Space Telescope and later space station work -- which will require astronauts to frequently lift objects of similar sized bulk.