
The Simulated Lunar Operations Lab at NASA Glenn Research Center serve to test planetary roving vehicle systems and components in simulated planetary and lunar conditions such as the VIPER Rover.

Volatiles Investigating Polar Exploration Rover, VIPER Testing in the Simulated Lunar Operations Lab, SLOPE Laboratory
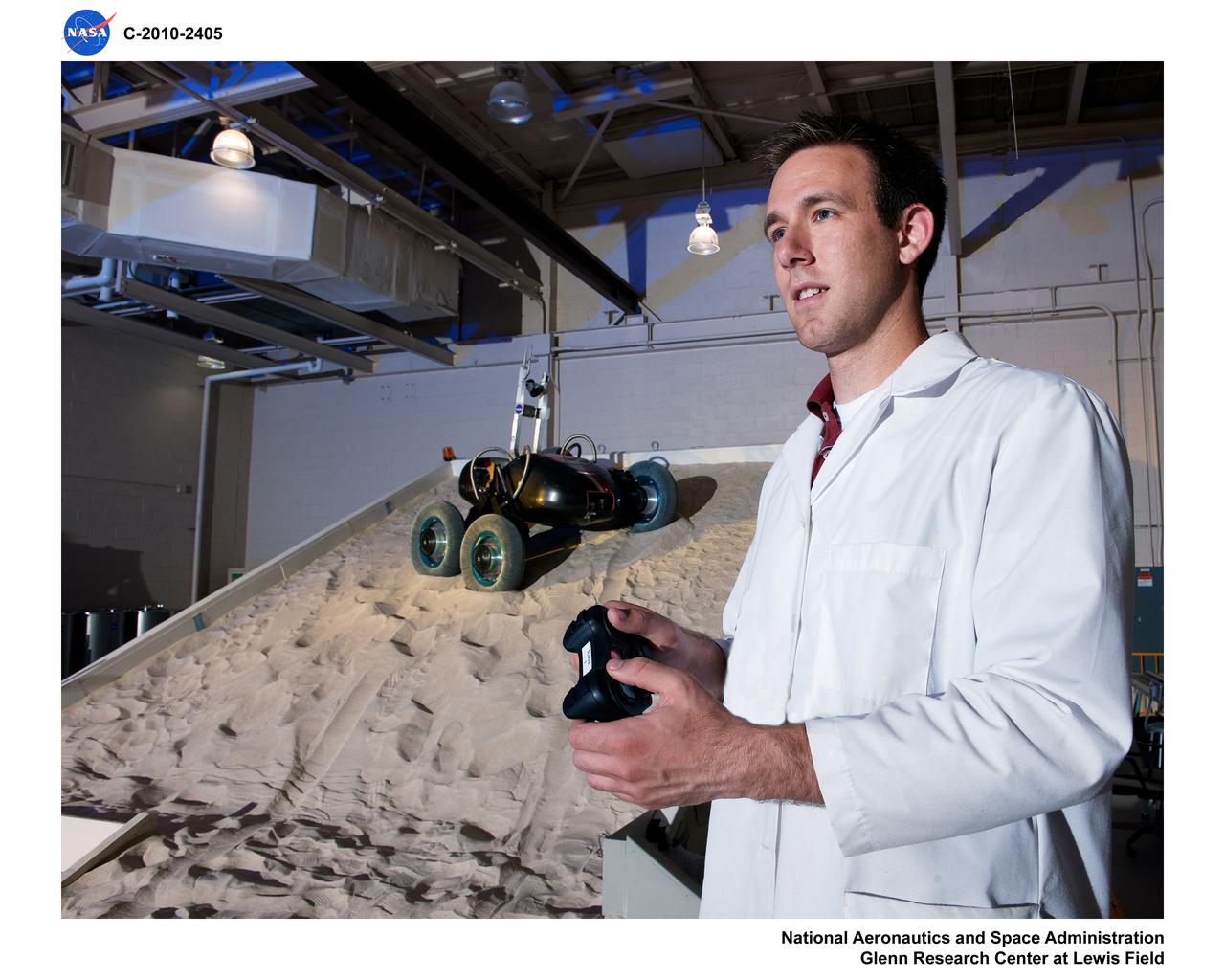
Simulated Lunar Operations Laboratory (SLOPE) Lab; Scarab Lunar Rover

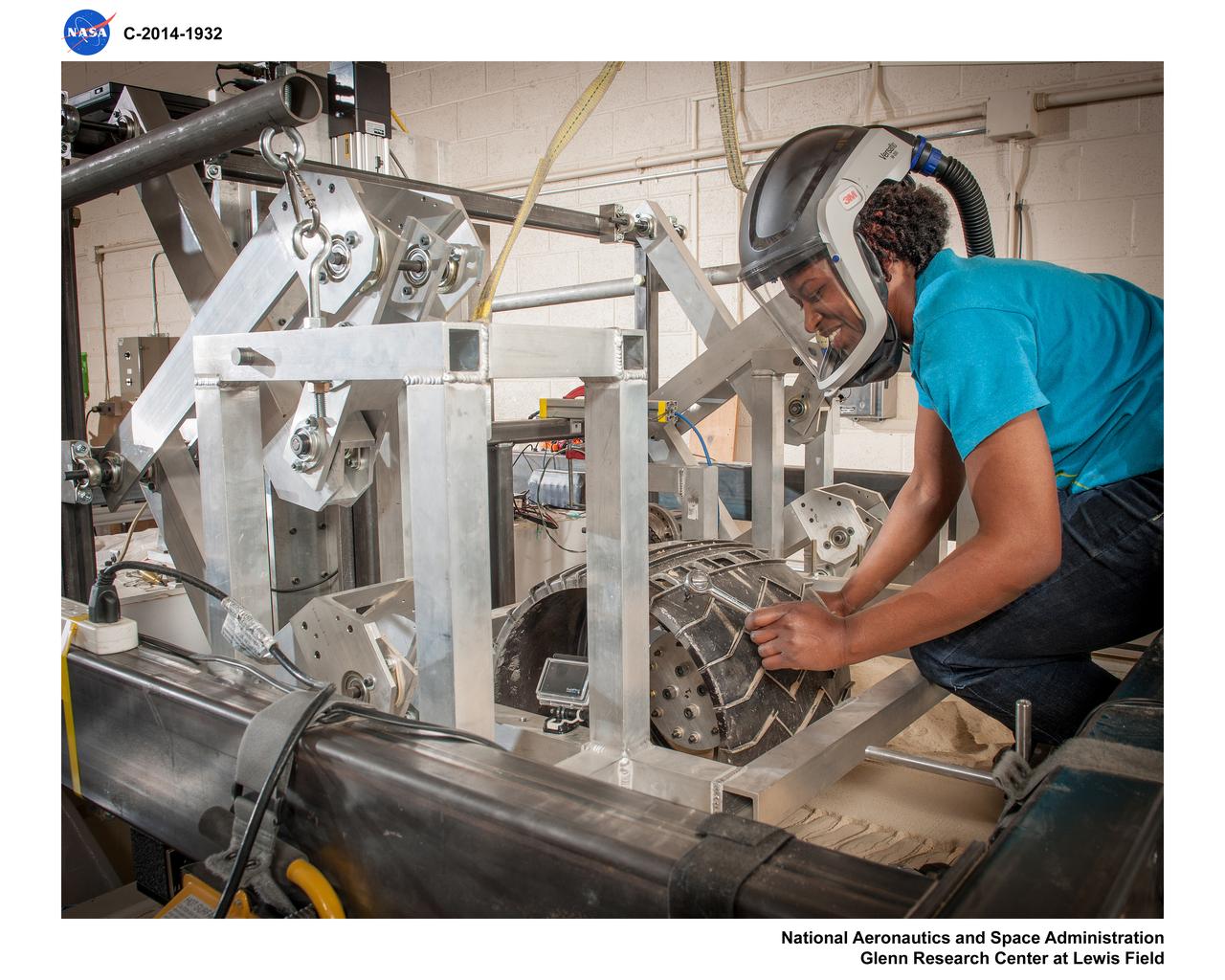
Wire Mesh Tire from the Simulated Lunar Operations Laboratory (SLOPE Lab)

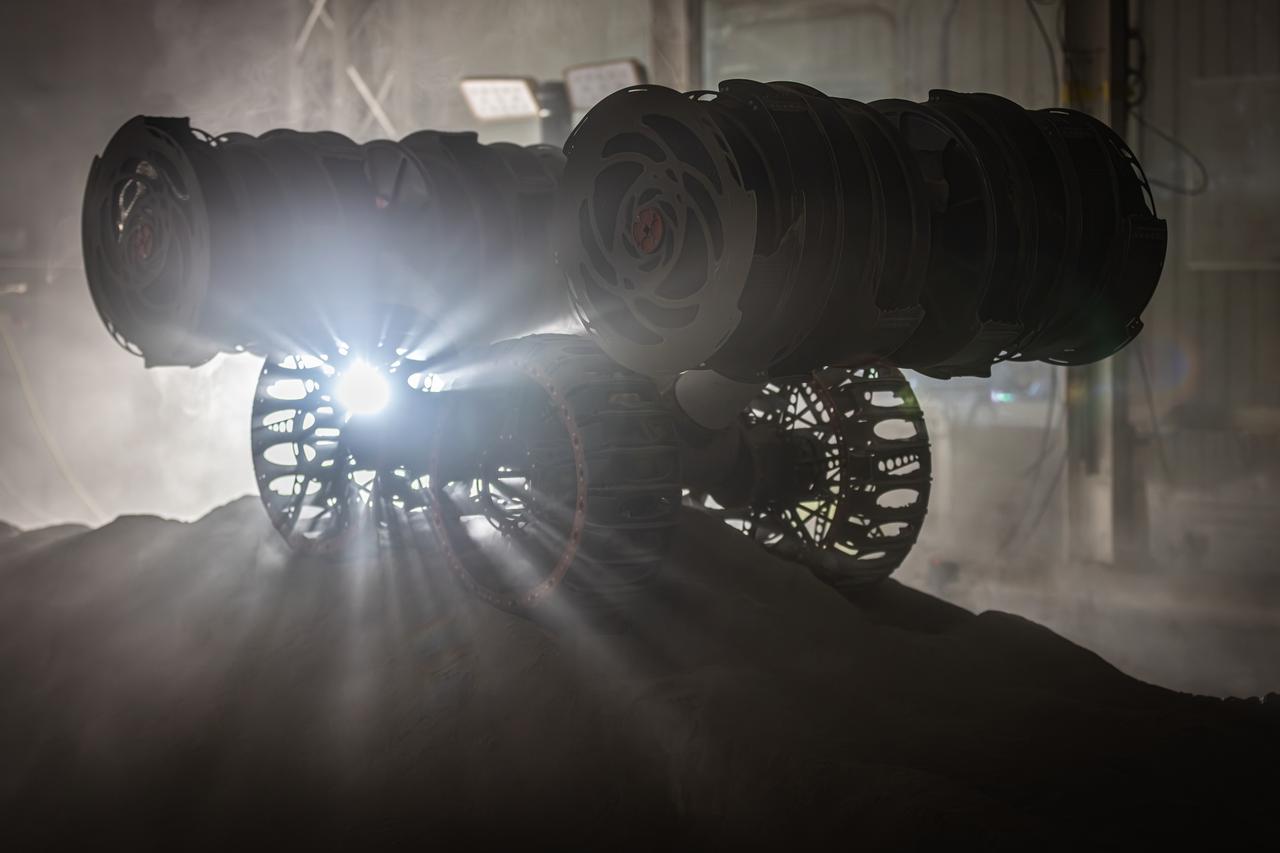
Airless Spring Wheel Prototype in the Simulated Lunar Operations Laboratory, SLOPE Lab

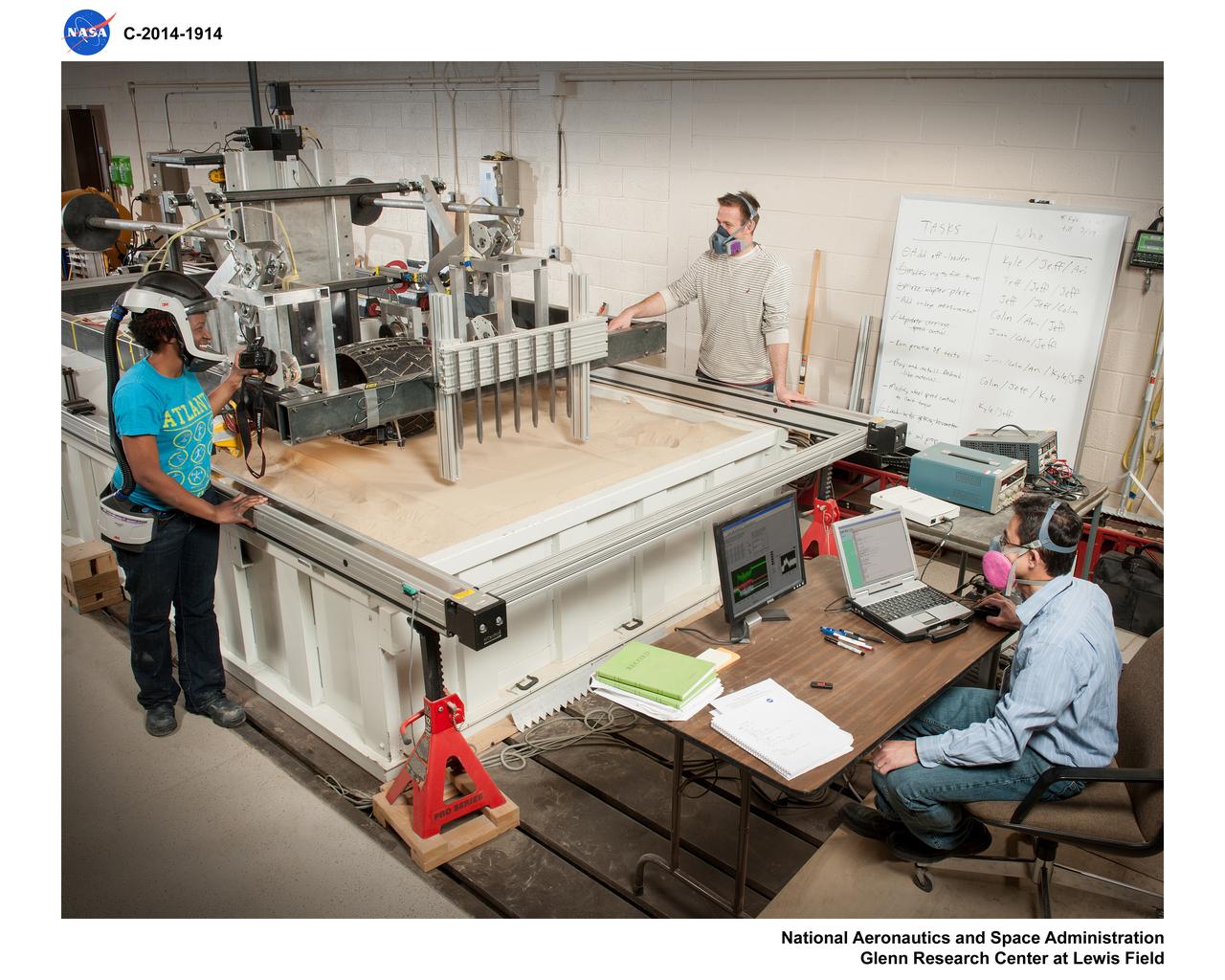
Fabrication of rover spring tires in the Simulated Lunar Operations, SLOPe Lab, Laboratory
Airless Spring Wheel Prototype in the Simulated Lunar Operations Laboratory, SLOPE Lab

Fabrication of rover spring tires in the Simulated Lunar Operations, SLOPe Lab, Laboratory

Airless Spring Wheel Prototype in the Simulated Lunar Operations Laboratory, SLOPE Lab

Fabrication of rover spring tires in the Simulated Lunar Operations, SLOPe Lab, Laboratory

Airless Spring Wheel Prototype in the Simulated Lunar Operations Laboratory, SLOPE Lab
Airless Spring Wheel Prototype in the Simulated Lunar Operations Laboratory, SLOPE Lab

Volatiles Investigating Polar Exploration Rover, VIPER Testing in the Simulated Lunar Operations Lab, SLOPE Laboratory

Volatiles Investigating Polar Exploration Rover, VIPER Testing in the Simulated Lunar Operations Lab, SLOPE Laboratory

Diane Linne in the Simulated Lunar Operations, SLOPE Lab - Percussive Excavation Bucket reduces reaction forces for extraterrestrial digging of loose and compacted or icy soils.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

Ben Burdess, mechanical engineer, observes NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
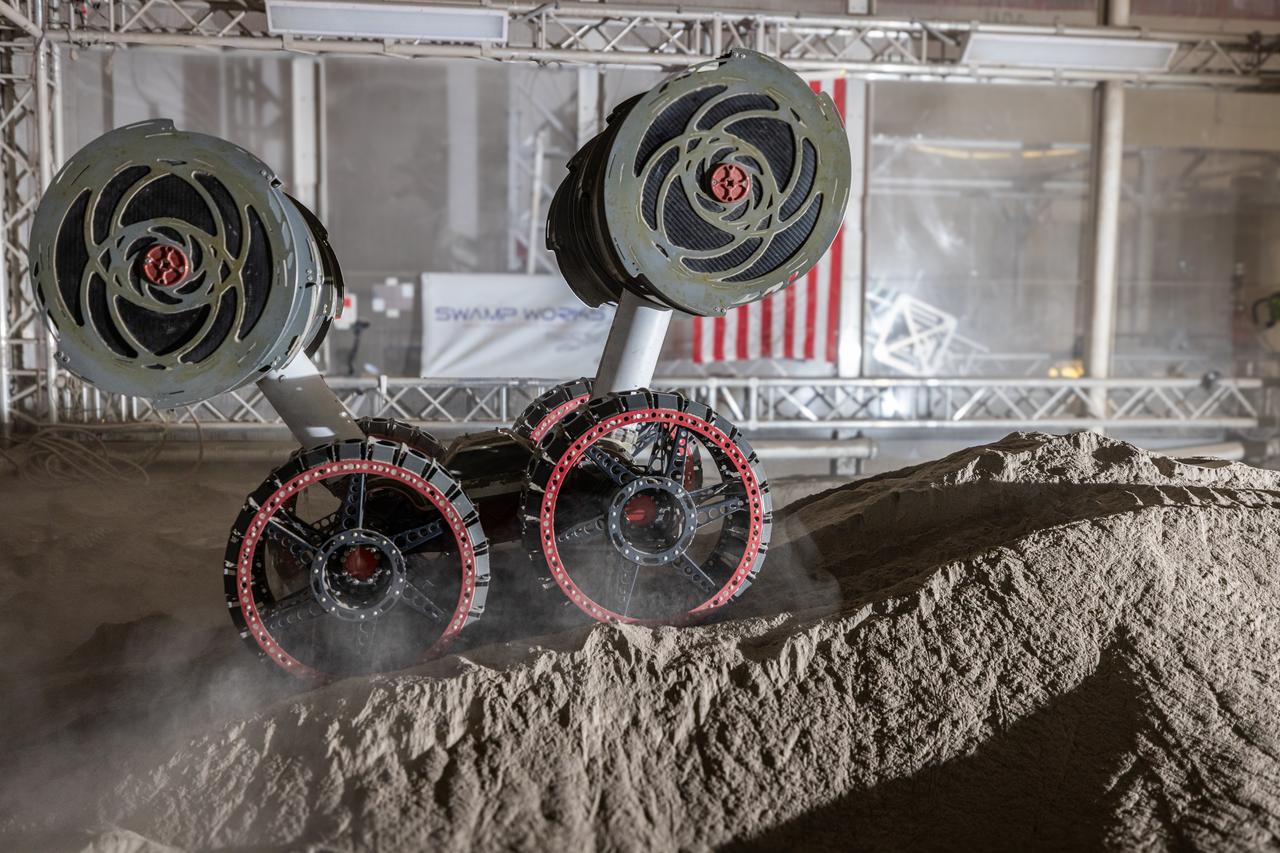
A mass-offloaded version of Astrobotic’s CubeRover – a lightweight, modular planetary rover – is used to simulate mobility in low lunar gravity inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Senior Software Engineer Taylor Whitaker reports the results of a drawbar pull run to Astrobotic staff outside of the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
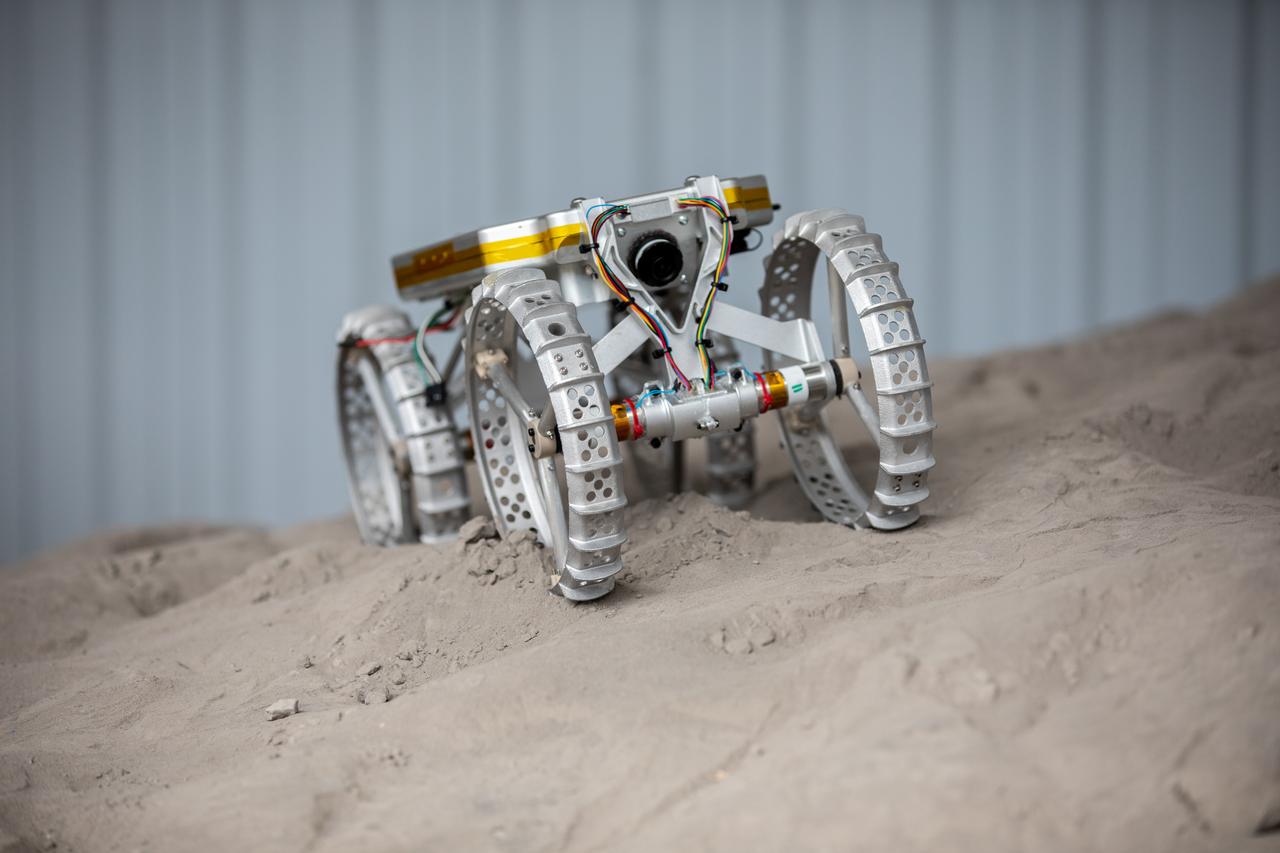
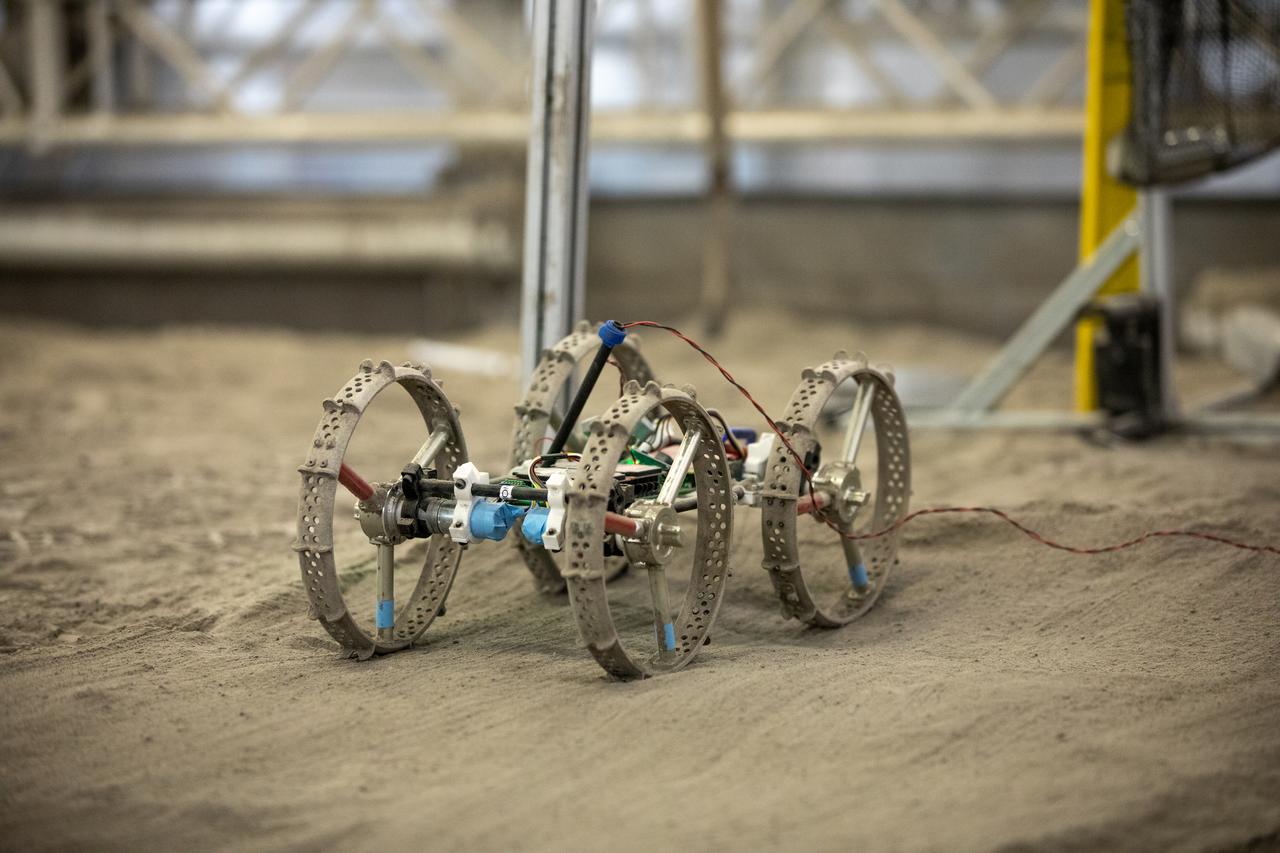
Astrobotic’s CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

Senior Software Engineer Taylor Whitaker stages Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – for a drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
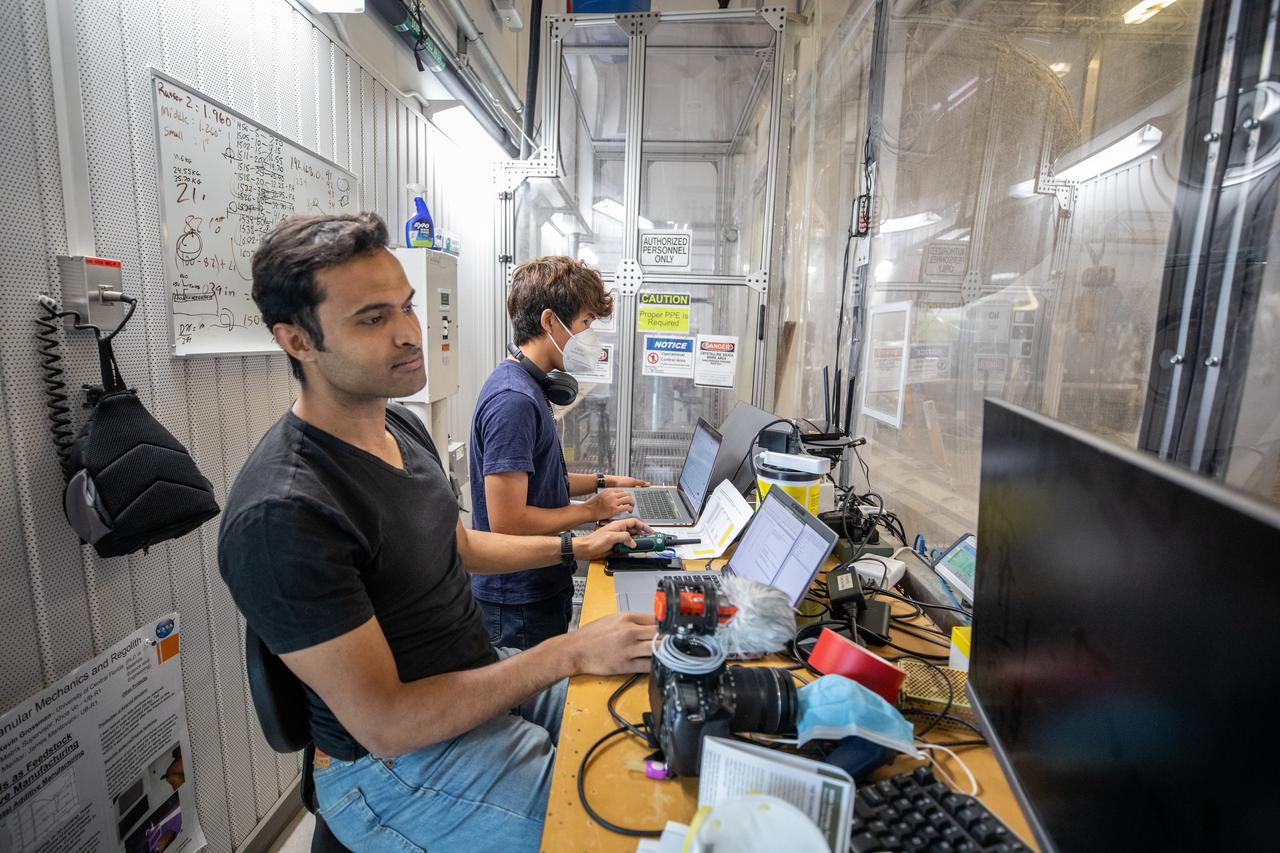
Senior Embedded Software Engineer Aamer Almujahed (left) and Software Engineering intern Ashten Akemoto run the ground software for Astrobotic’s CubeRover drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.