
AS16-108-17622 (22 April 1972) --- Astronaut John W. Young, commander of the Apollo 16 lunar landing mission, reaches for tools in the Apollo Lunar Hand Tool Carrier at the aft end of the Lunar Roving Vehicle (LRV) during the second Apollo 16 extravehicular activity (EVA) at the Descartes landing site. This photograph was taken by astronaut Charles M. Duke Jr., lunar module pilot. This view is looking south from the base of Stone Mountain. While astronauts Young and Duke descended in the Lunar Module (LM) "Orion" to explore the Descartes highlands region of the moon, astronaut Thomas K. Mattingly II, command module pilot, remained with the Command and Service Modules (CSM) "Casper" in lunar orbit.

AS16-110-17960 (22 April 1972) --- Astronaut John W. Young, commander, replaces tools in the Apollo Lunar Hand Tool (ALHT) carrier at the aft end of the Lunar Roving Vehicle (LRV) during the second Apollo 16 extravehicular activity (EVA) on the high side of Stone Mountain at the Descartes landing site. Astronaut Charles M. Duke Jr., lunar module pilot, took this photograph near the conclusion of Station 4 activities. Smoky Mountain, with the large Ravine Crater on its flank, is in the left background. This view is looking northeast. While astronauts Young and Duke descended in the Apollo 16 Lunar Module (LM) "Orion" to explore the Descartes highlands landing site on the moon, astronaut Thomas K. Mattingly II, command module pilot, remained with the Command and Service Modules (CSM) "Casper" in lunar orbit.
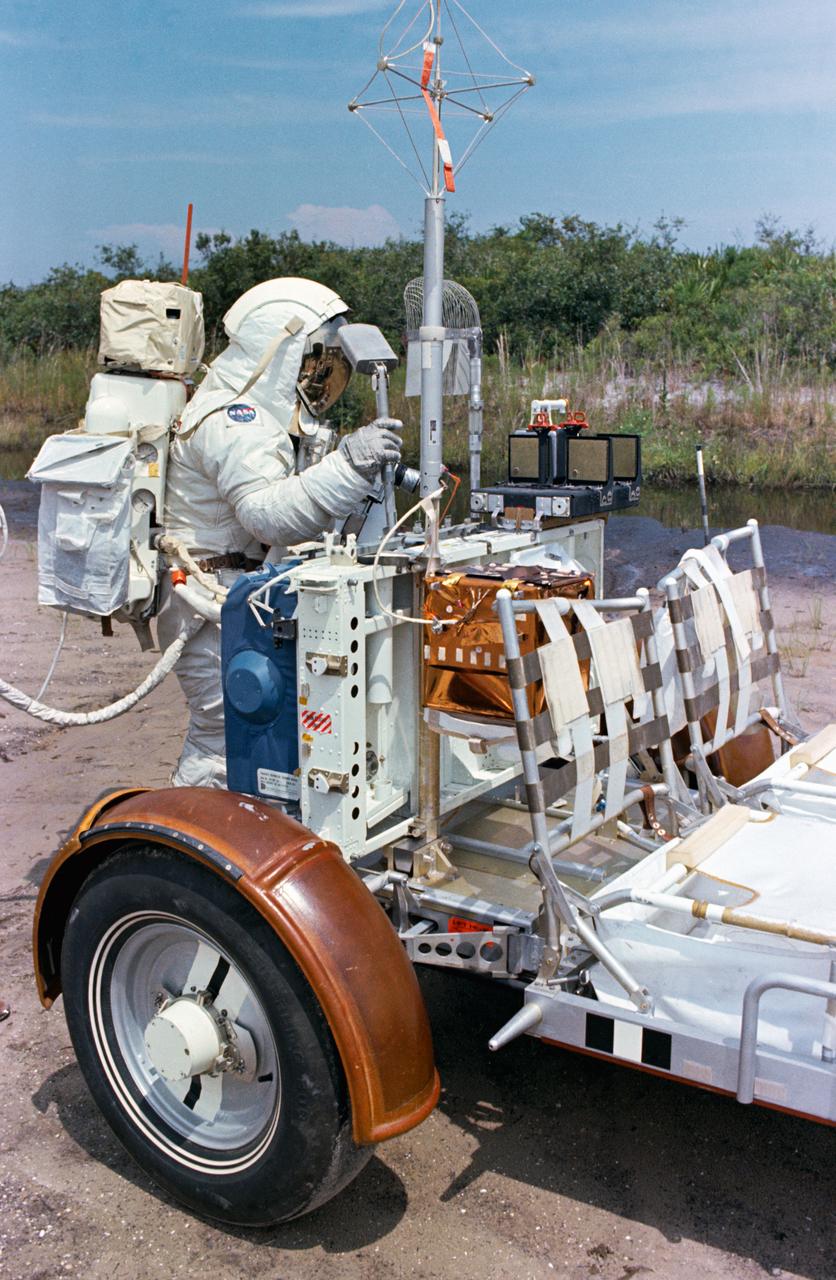
S72-48890 (September 1972) --- Scientist-astronaut Harrison H. Schmitt, lunar module pilot of the Apollo 17 lunar landing mission, procures a geological hand tool from the tool carrier at the aft end of the Lunar Roving Vehicle during lunar surface extravehicular activity simulation training at the Kennedy Space Center (KSC), Florida. Schmitt grasps a scoop with extension handle in his right hand.

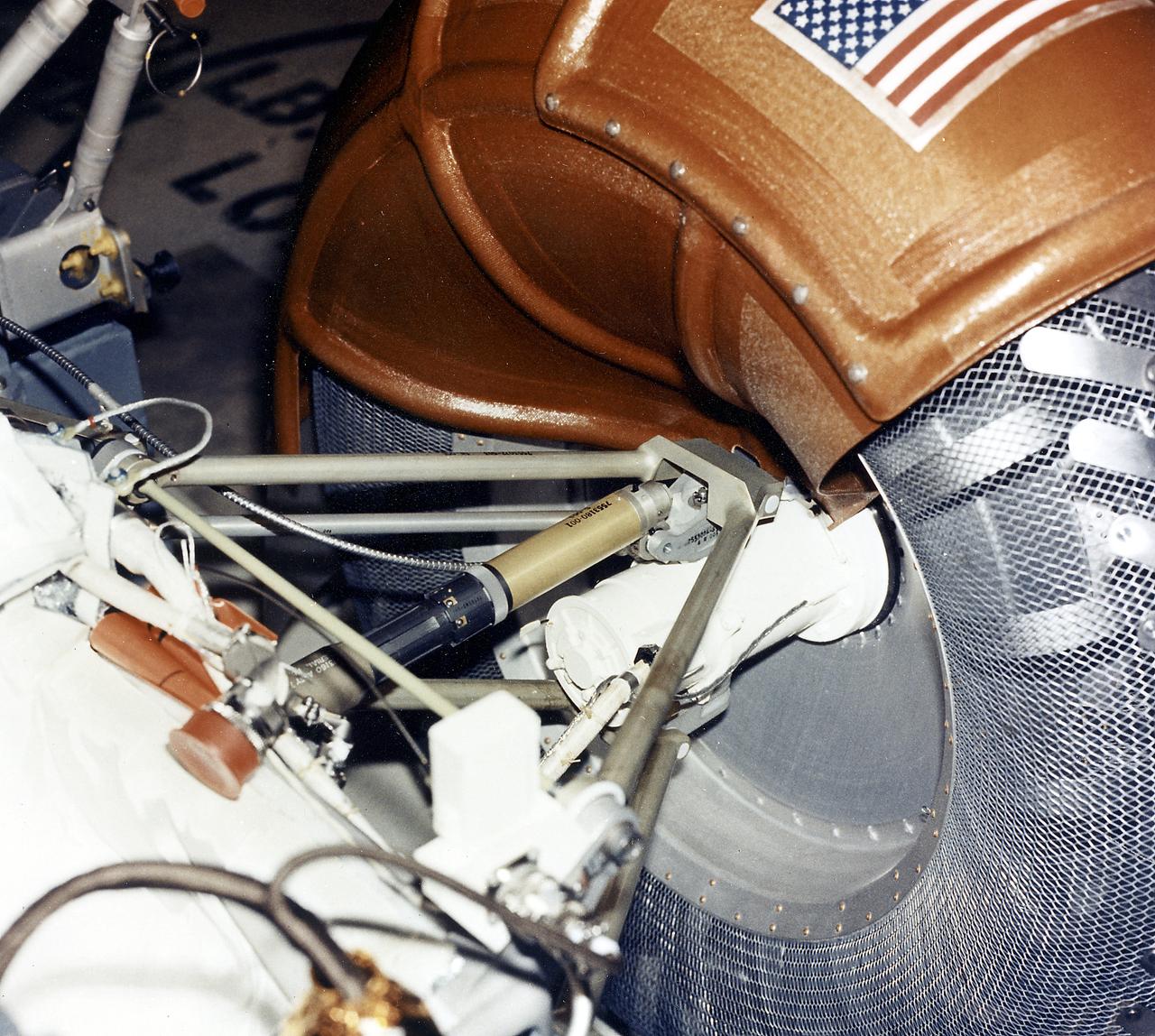
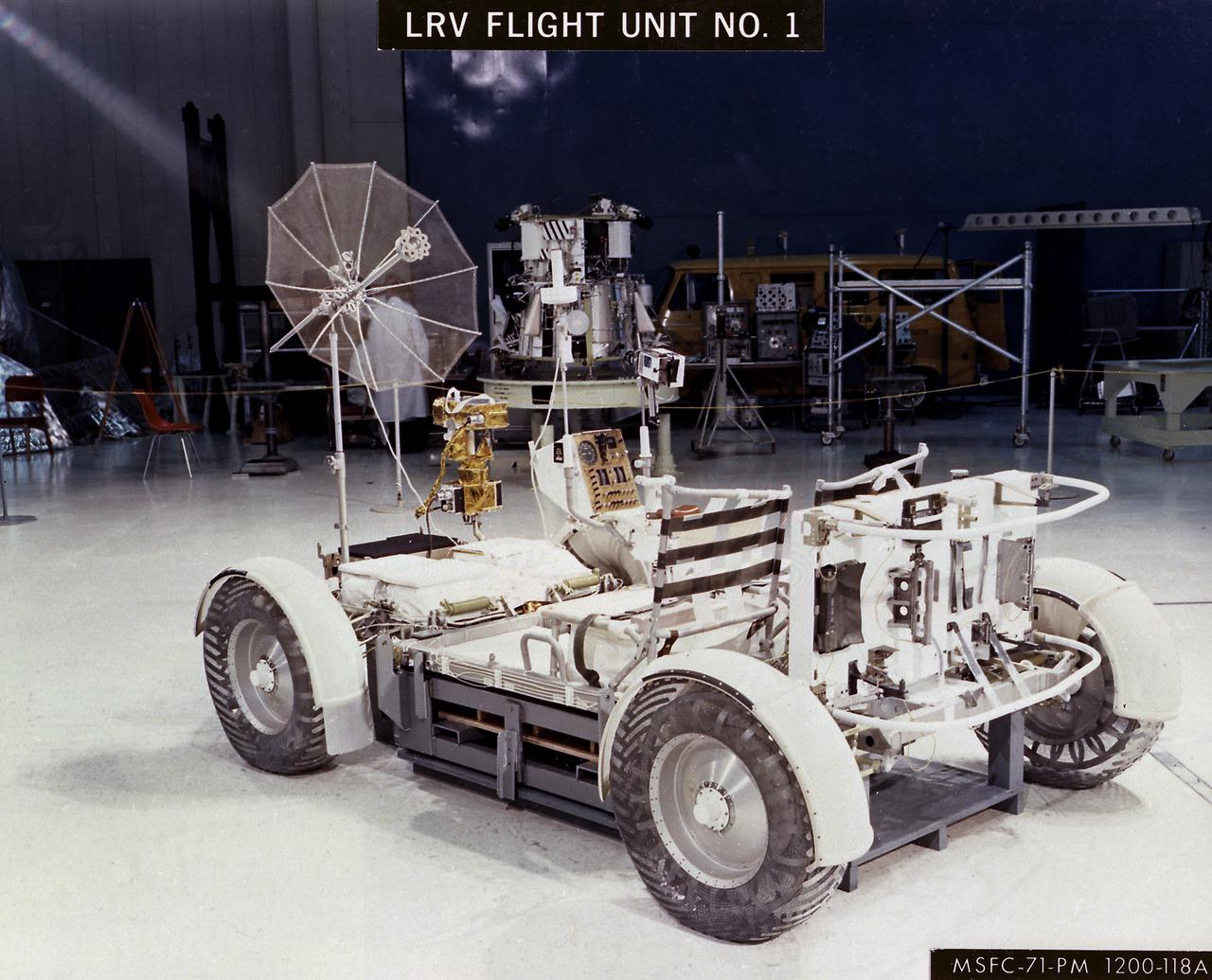
This is a close-up view of a left front wheel of the Lunar Roving Vehicle (LRV) No. 1. The LRV was built to give Apollo astronauts a greater range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
This is a close-up inboard view of a left front wheel of the Lunar Roving Vehicle (LRV) No. 1. The LRV was built to give Apollo astronauts a greater Range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
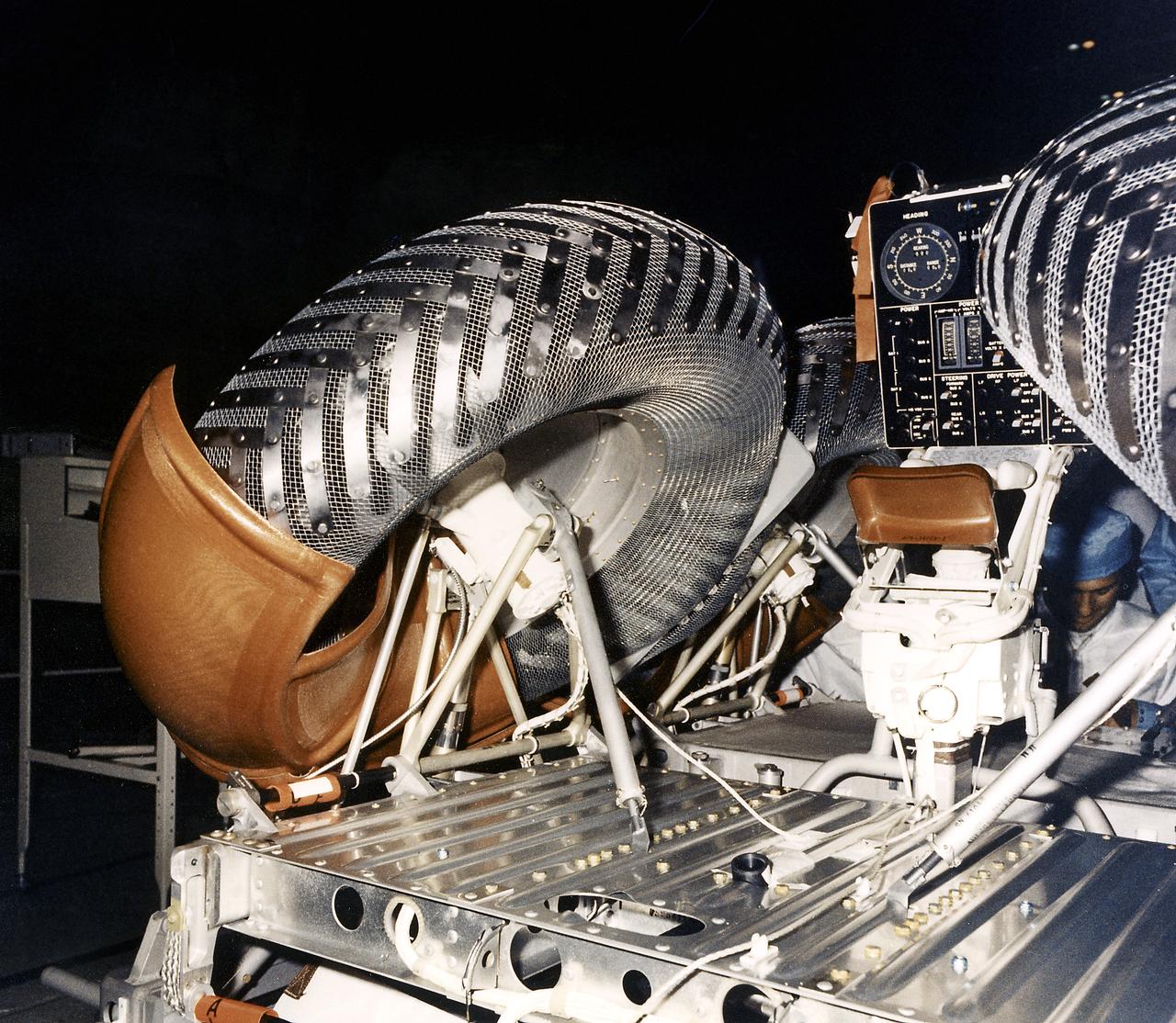
This photograph shows a rear view of a folded configuration of the Lunar Roving Vehicle (LRV) No. 2. The LRV was built to give Apollo astronauts a greater range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
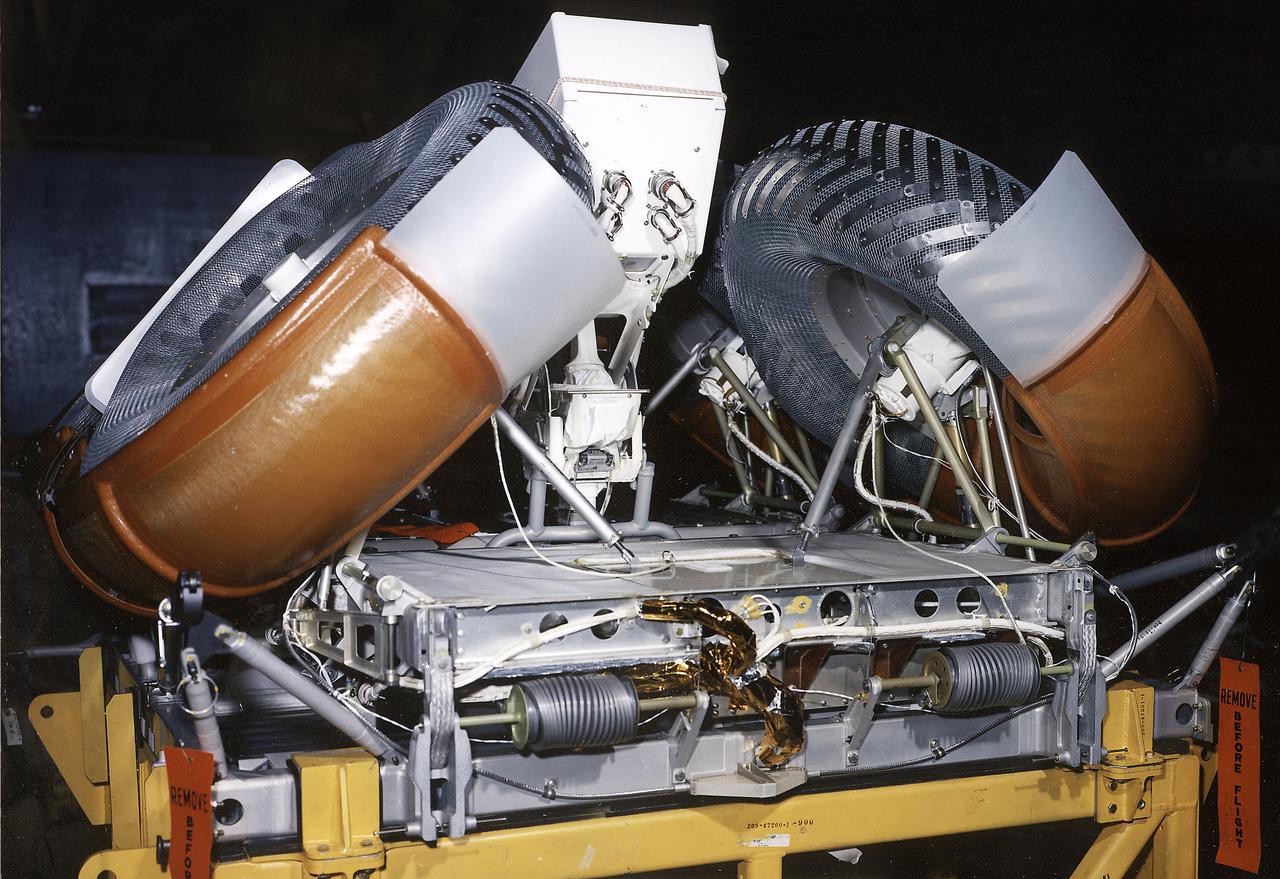
This photograph shows a front view of a folded configuration of the Lunar Roving Vehicle (LRV) No. 2. The LRV was built to give Apollo astronauts a greater range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
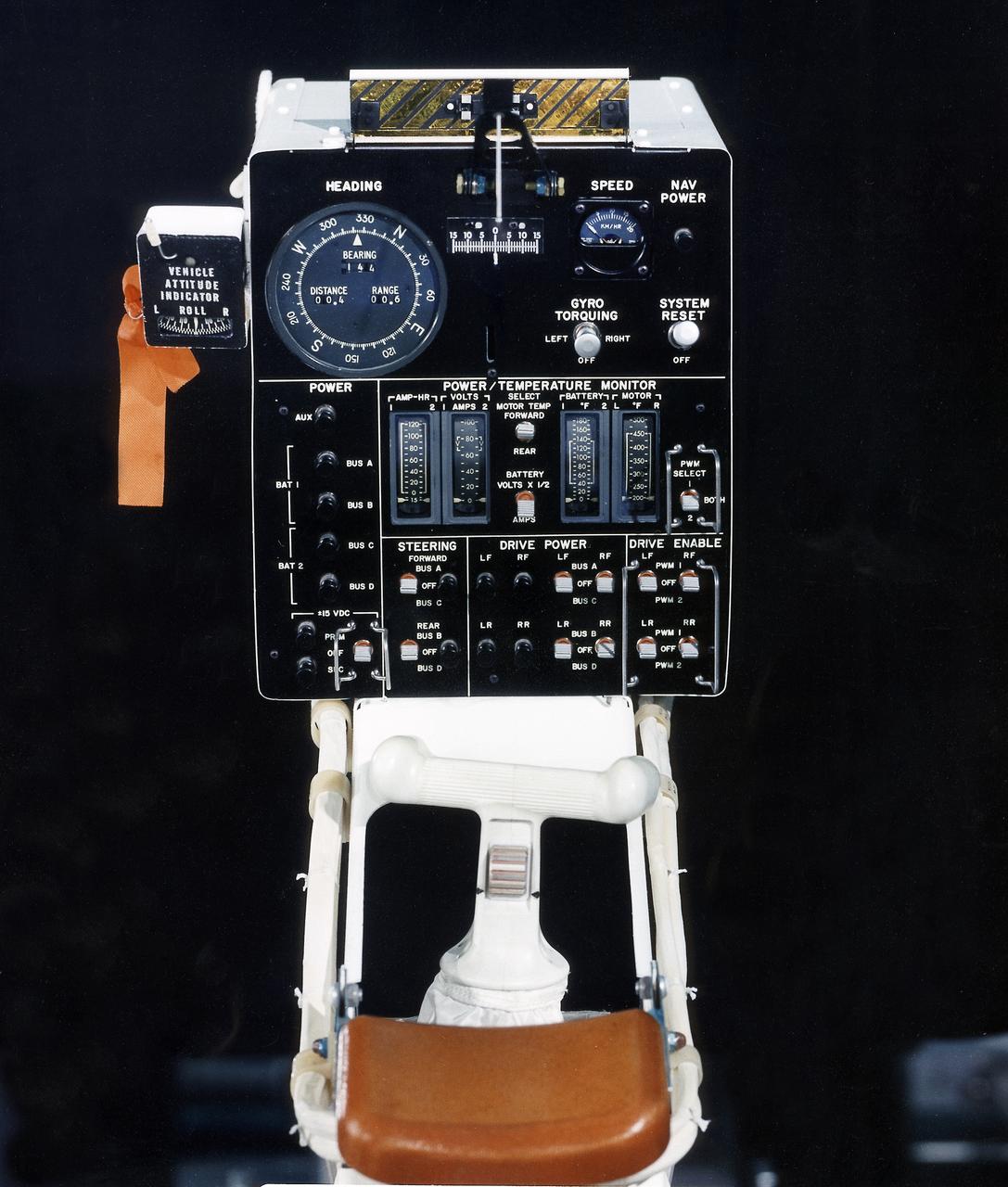
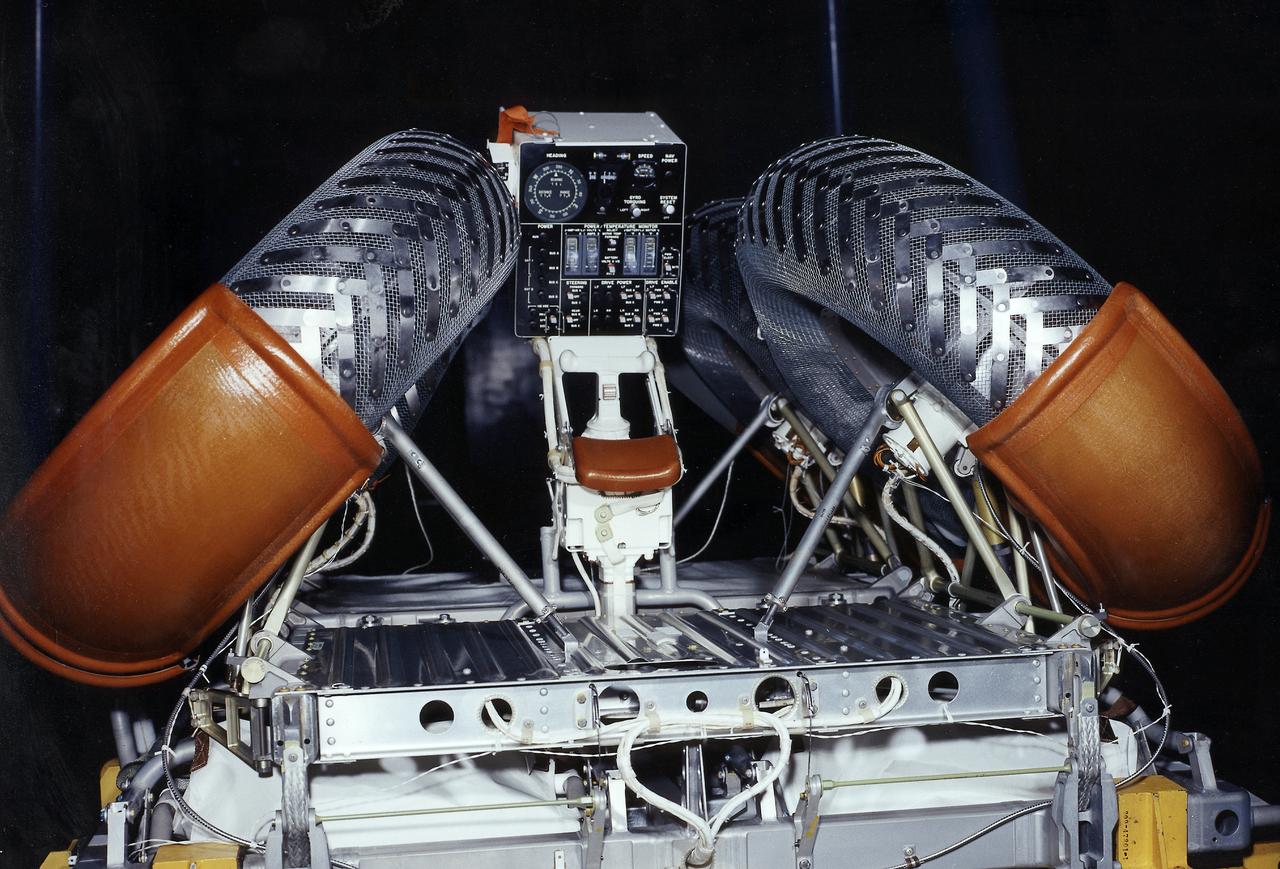
This photograph is a view of a display, control console, and hand controller for the Lunar Roving Vehicle (LRV) No. 2. The LRV was built to give Apollo astronauts a greater range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
This is a close-up view of a right rear wheel strut of the Lunar Roving Vehicle (LRV) No. 1. The LRV was built to give Apollo astronauts a greater range of mobility during lunar exploration. It was an open-space and collapsible vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and camera. An LRV was used on each of the last three Apollo missions; Apollo 15, Apollo 16, and Apollo 17. It was built by the Boeing Company under the direction of the Marshall Space Flight Center.
AS17-146-22296 (13 Dec. 1972) --- Astronaut Harrison H. Schmitt, lunar module pilot, works near the Lunar Roving Vehicle (LRV) during the third Apollo 17 extravehicular activity (EVA) at the Taurus-Littrow site on the lunar surface. The front part of the LRV is out of frame at left, but the seats and several geological tools can be seen. The photo was taken by astronaut Eugene A. Cernan, mission commander.

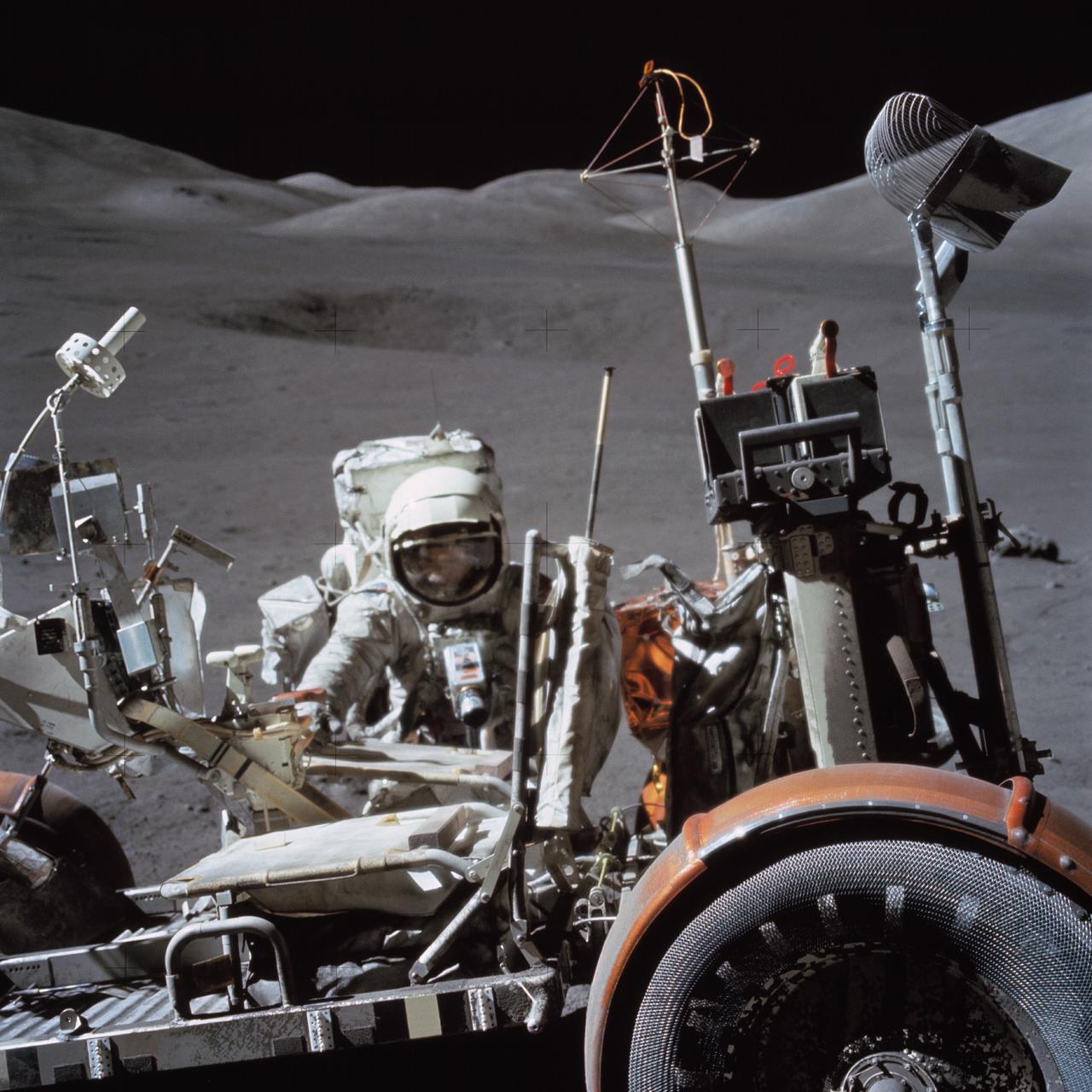
AS17-147-22526 (11 Dec. 1972) --- Astronaut Eugene A. Cernan, commander, makes a short checkout of the Lunar Roving Vehicle (LRV) during the early part of the first Apollo 17 extravehicular activity (EVA) at the Taurus-Littrow landing site. This view of the "stripped down" LRV is prior to loading up. Equipment later loaded onto the LRV included the ground-controlled television assembly, the lunar communications relay unit, hi-gain antenna, low-gain antenna, aft tool pallet, lunar tools and scientific gear. This photograph was taken by scientist-astronaut Harrison H. Schmitt, lunar module pilot. The mountain in the right background is the east end of South Massif. While astronauts Cernan and Schmitt descended in the Lunar Module (LM) "Challenger" to explore the moon, astronaut Ronald E. Evans, command module pilot, remained with the Command and Service Modules (CSM) "America" in lunar orbit.

The Lunar Roving Vehicle (LRV) was designed to transport astronauts and materials on the Moon. It was a collapsible open-space vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and cameras. Powered by two 36-volt batteries, it has four 1/4-hp drive motors, one for each wheel. The vehicle was designed to travel in forward or reverse, negotiate obstacles about 1 foot high, cross crevasses about 2 feet wide, and climb or descend moderate slopes. Its speed limit was about 9 miles (14 kilometers) per hour. An LRV was used on each of the last three Apollo missions (Apollo 15, Apollo 16, and Apollo 17) and permitted the crew to travel several miles from the Lunar Module. The LRV was designed, developed, and tested by the Marshall Space Flight Center, and built by the Boeing Plant in Kent, Washington.
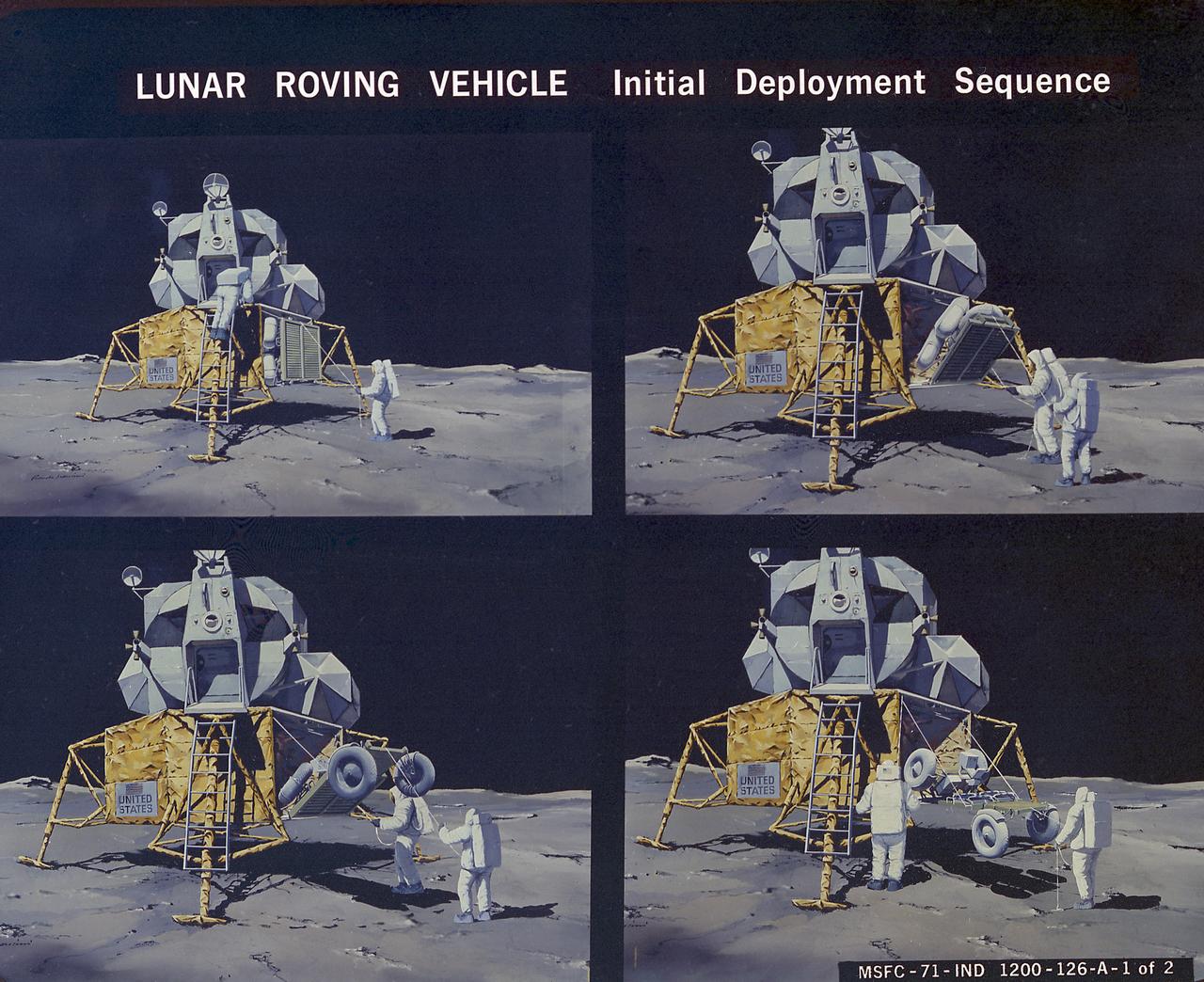
This artist's concept illustrates the deployment sequence of the Lunar Roving Vehicle (LRV) on the Moon. The LRV was designed to transport astronauts and materials on the Moon. It was a collapsible open-space vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and cameras. Powered by two 36-volt batteries, it has four 1/4-hp drive motors, one for each wheel. The vehicle was designed to travel in forward or reverse, negotiate obstacles about 1 foot high, cross crevasses about 2 feet wide, and climb or descend moderate slopes. Its speed limit was about 9 miles (14 kilometers) per hour. An LRV was used on each of the last three Apollo missions (Apollo 15, Apollo 16, and Apollo 17) and permitted the crew to travel several miles from the Lunar Module. The LRV was designed, developed, and tested by the Marshall Space Flight Center, and built by the Boeing Plant in Kent, Washington.
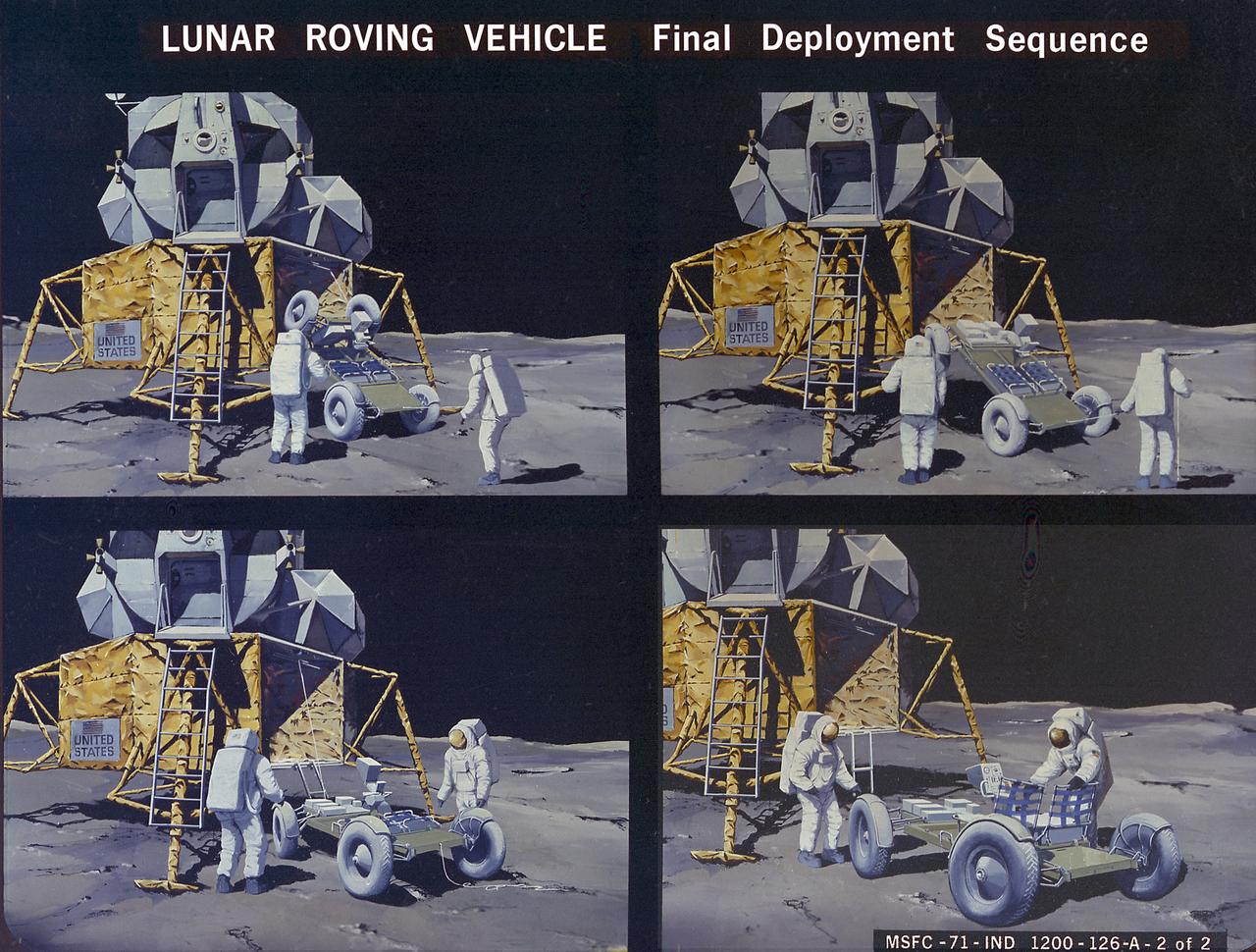
This artist's concept illustrates the deployment sequence of the Lunar Roving Vehicle (LRV) on the Moon. The LRV was designed to transport astronauts and materials on the Moon. It was a collapsible open-space vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and cameras. Powered by two 36-volt batteries, it has four 1/4-hp drive motors, one for each wheel. The vehicle was designed to travel in forward or reverse, negotiate obstacles about 1 foot high, cross crevasses about 2 feet wide, and climb or descend moderate slopes. Its speed limit was about 9 miles (14 kilometers) per hour. An LRV was used on each of the last three Apollo missions (Apollo 15, Apollo 16, and Apollo 17) and permitted the crew to travel several miles from the Lunar Module. The LRV was designed, developed, and tested by the Marshall Space Flight Center, and built by the Boeing Plant in Kent, Washington.
The Lunar Roving Vehicle (LRV) was designed to transport astronauts and materials on the Moon. It was a collapsible open-space vehicle about 10 feet long with large mesh wheels, anterna, appendages, tool caddies, and cameras. Powered by two 36-volt batteries, it has four 1/4-hp drive motors, one for each wheel. The vehicle was designed to travel in forward or reverse, negotiate obstacles about 1 foot high, cross crevasses about 2 feet wide, and climb or descend moderate slopes. Its speed limit was about 9 miles (14 kilometers) per hour. An LRV was used on each of the last three Apollo missions (Apollo 15, Apollo 16, and Apollo 17) and permitted the crews to travel several miles from the Lunar Module. The LRV was designed, developed, and tested by the Marshall Space Flight Center, and built by the Boeing Plant in Kent, Washington.
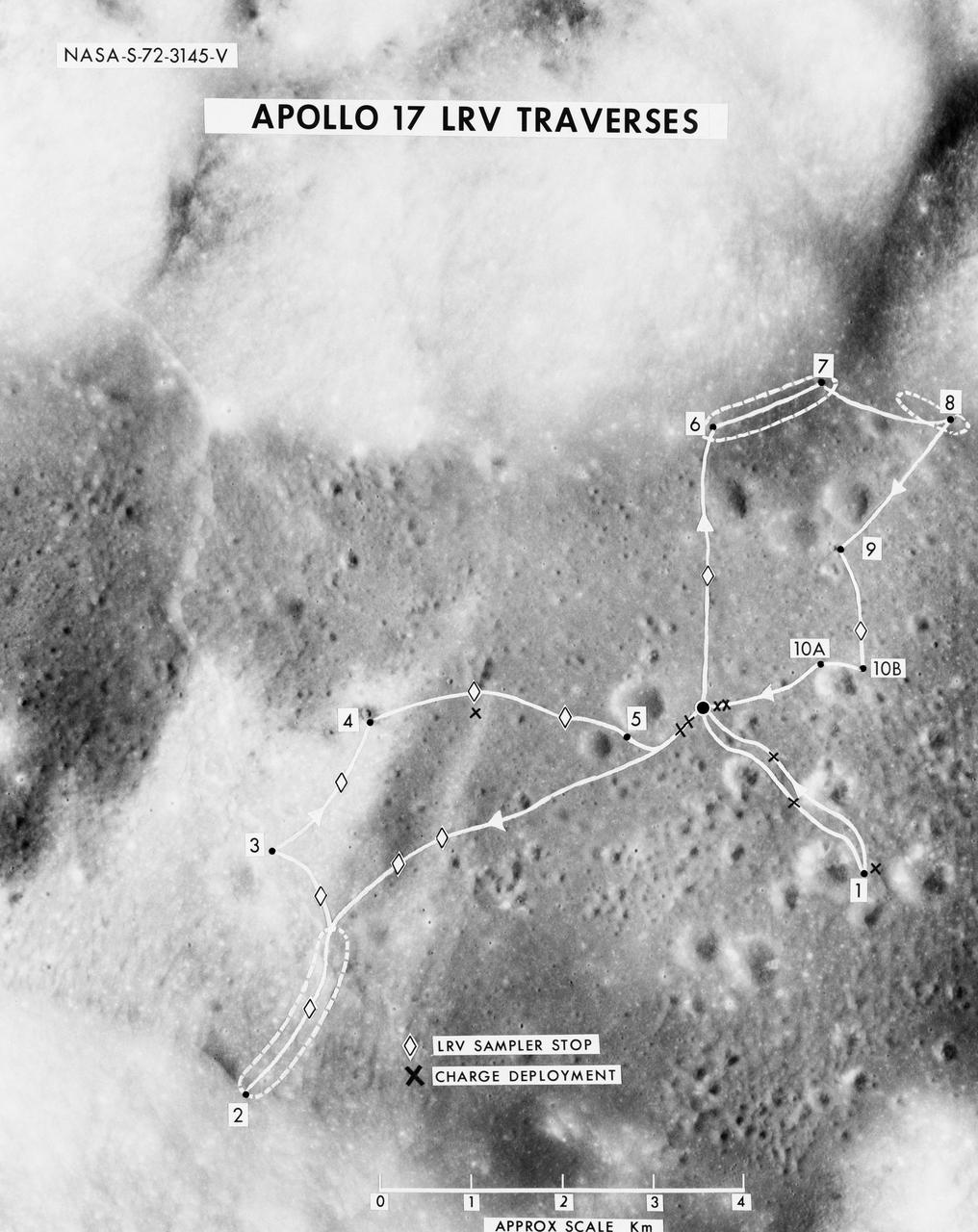
S72-03145 (October 1972) --- A vertical view of the Apollo 17 Taurus-Littrow site with an overlay to illustrate the three planned Apollo 17 traverses using the Lunar Roving Vehicle (LRV). The EVA-1 traverse has a single station (1); the EVA-2 traverse has four stations (2,3,4,5); and the EVA-3 traverse has five stations (6,7,8,9,10). Stations 10-A and 10-B are alternate locations for Station 10. In addition to the major stations mentioned above, brief stops are planned for sampling between stations using the LRV sampler tool (note diamond-shaped figures), and for deploying explosive charges associated with the Lunar Seismic Profiling Experiment (LSPE - note black x-marks).