Spirit Traverse Map
Eagle Crater Traverse Area
Spirit Prime-Mission Traverse
Spirit Traverse Map, Sol 680
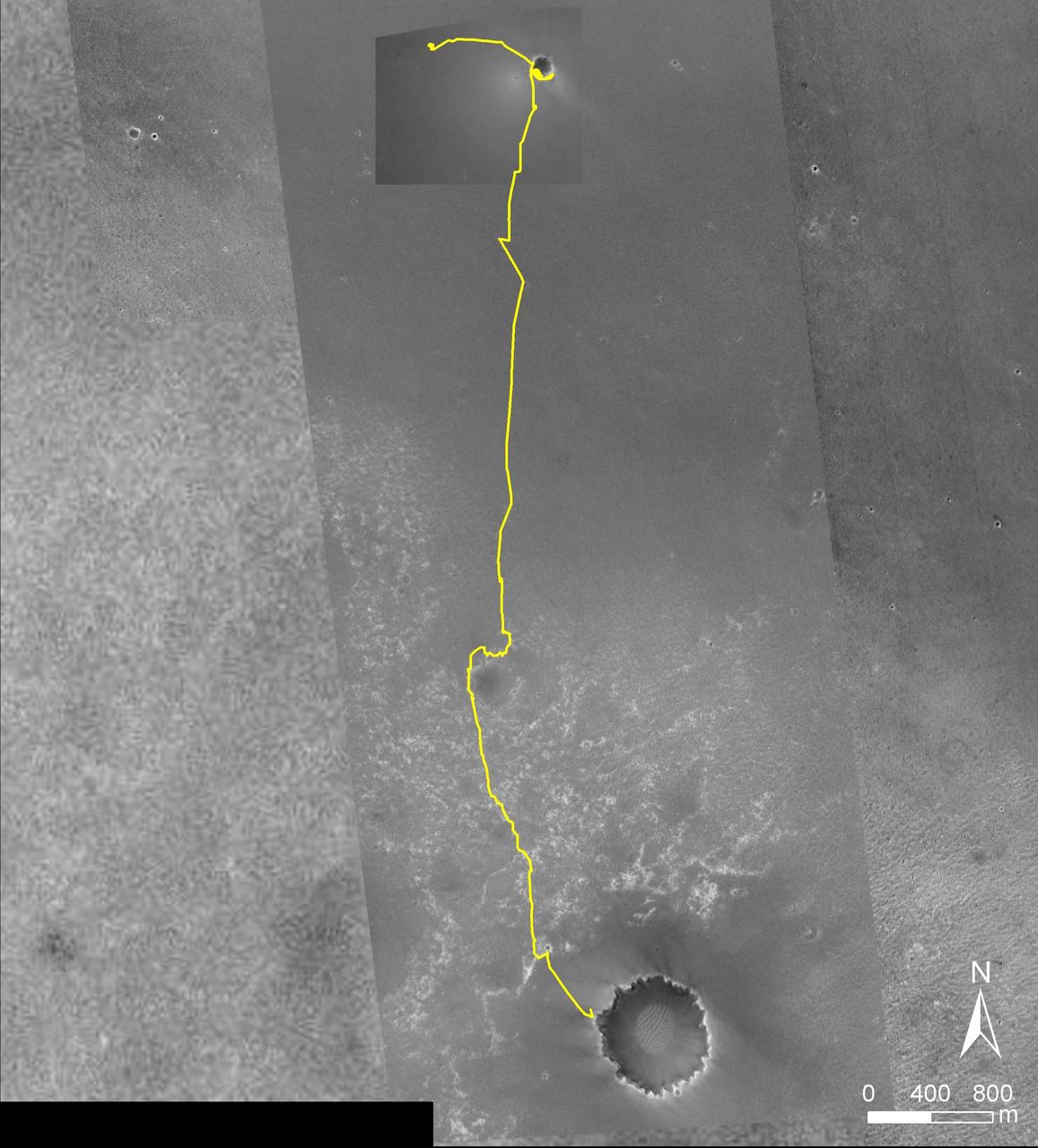
Opportunity Traverse Map, Eagle to Victoria
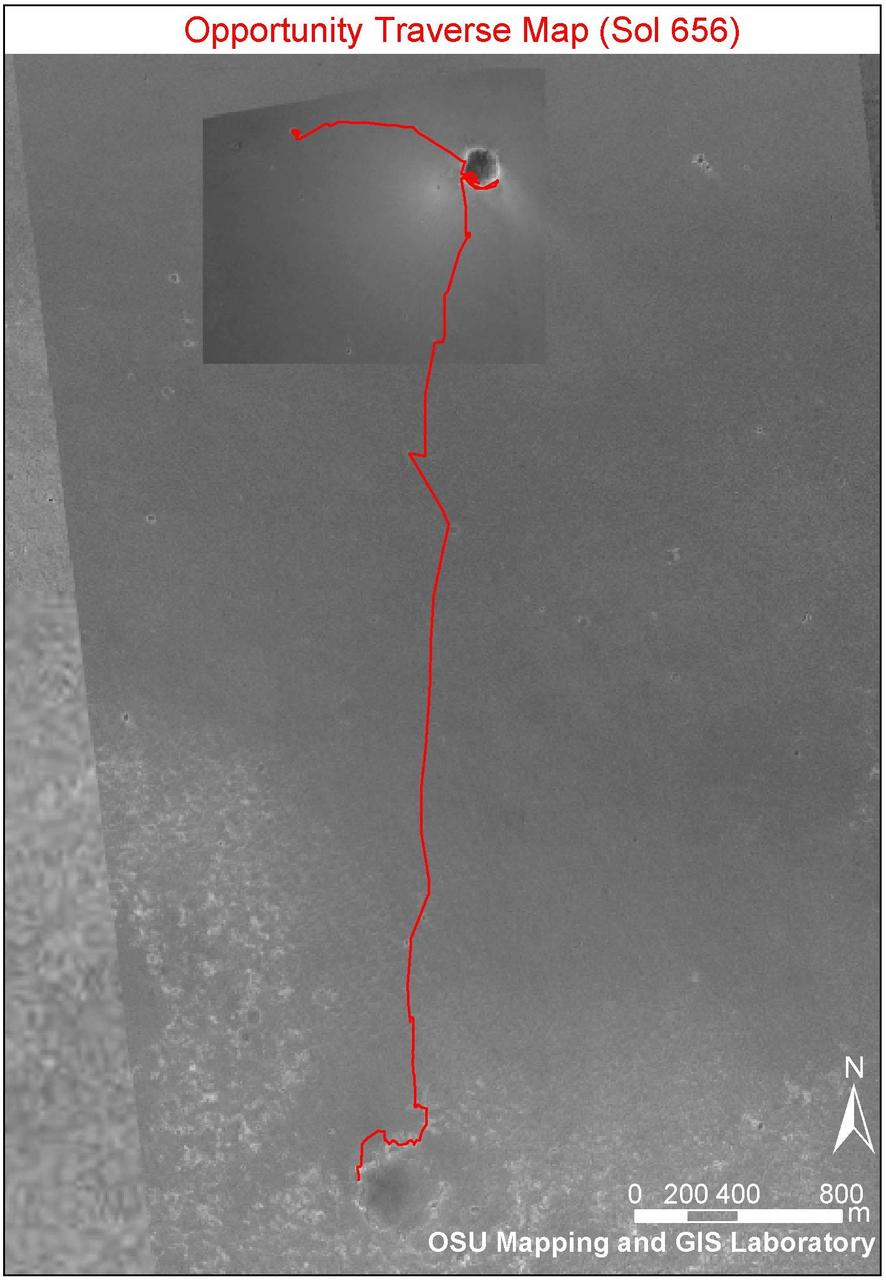
Opportunity Traverse Map, Sol 656

A Traverse Across the Summit of Olympus Mons

Opportunity Sol 1742 Traverse Map
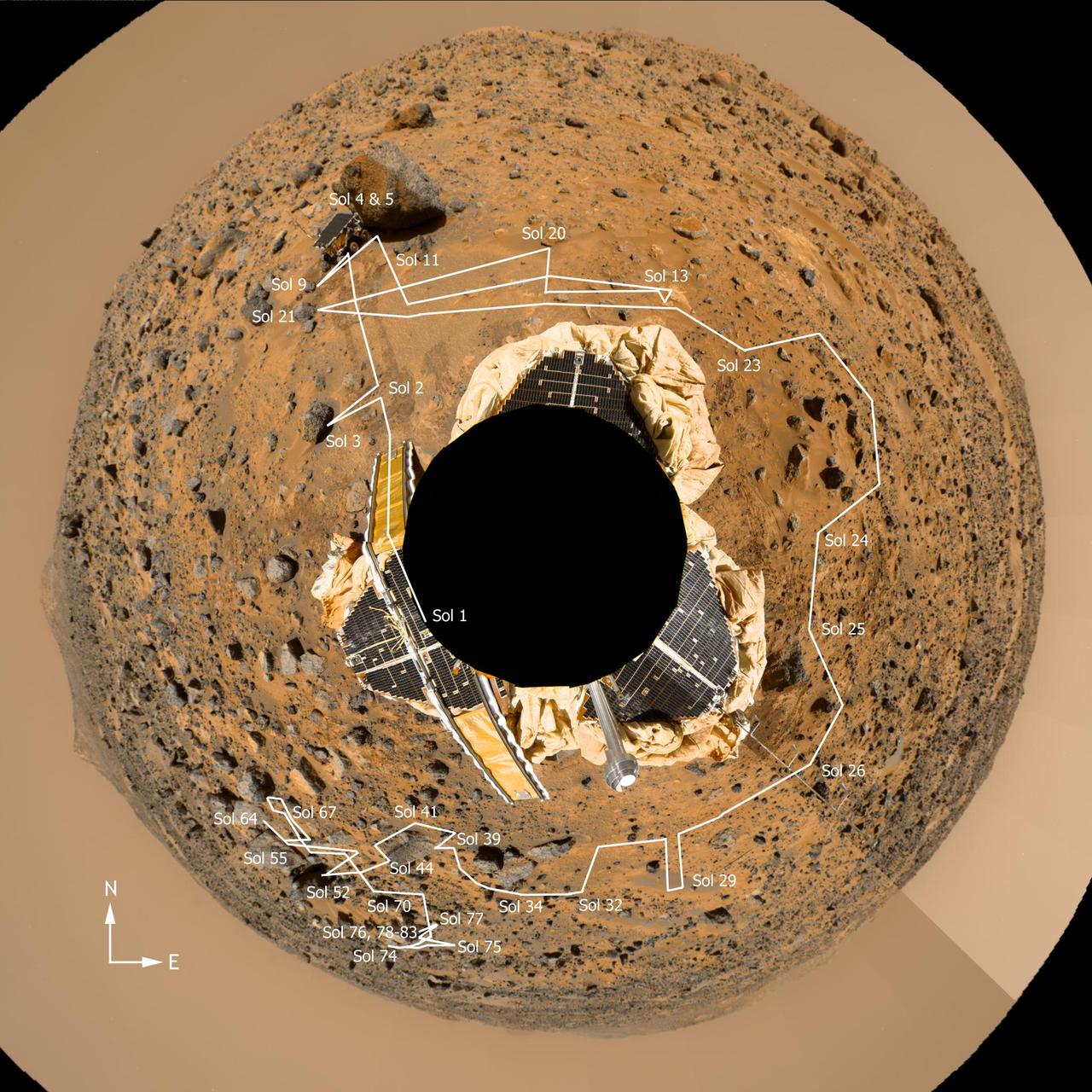
Mars PathFinder Rover Traverse Image
Spirit Traverse, Sols 1 to 1,386
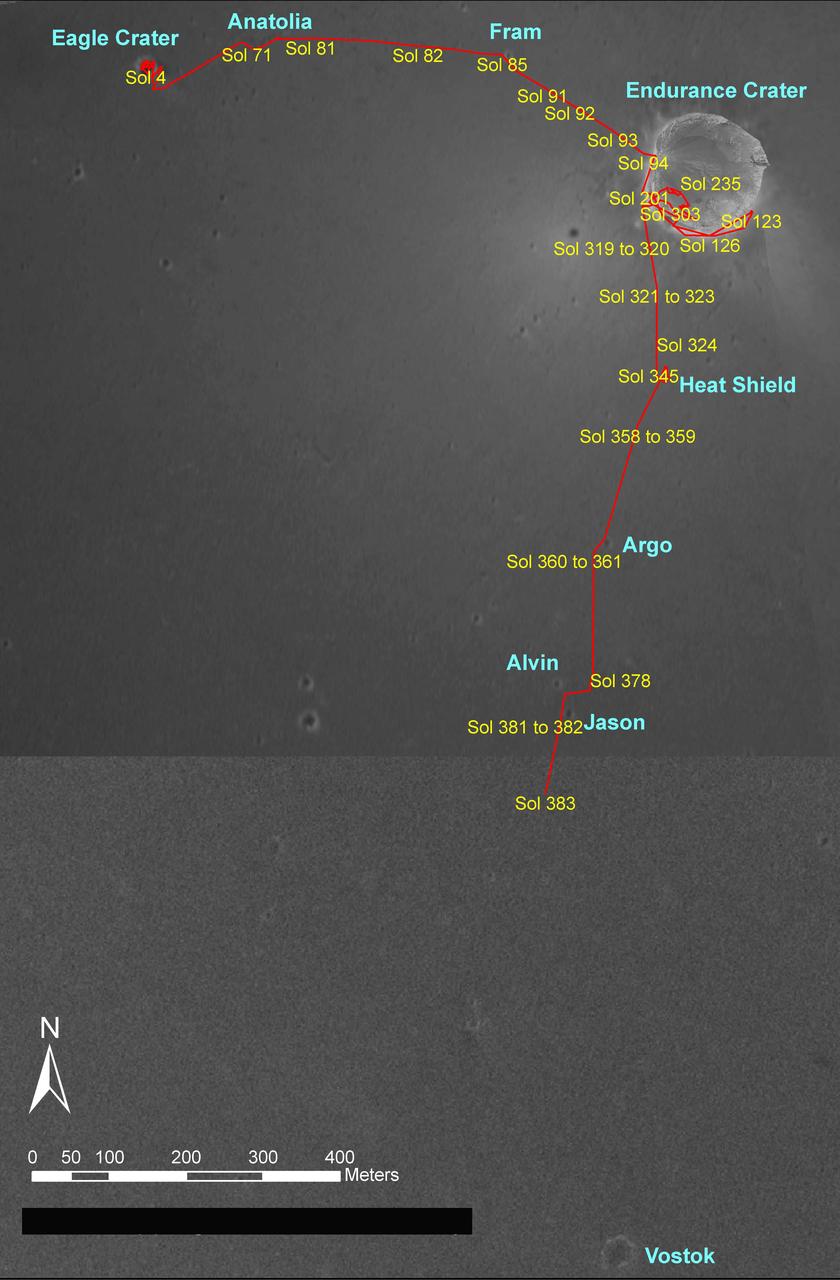
Opportunity Traverse Map, Sol 383

Traversing Microphone & Dodecahedron Loudspeaker (with pen lights - laser beams) in Anechoic Chamber with Chris Allen) Dedechedron meaning 12 sided polyhedron - polygon)
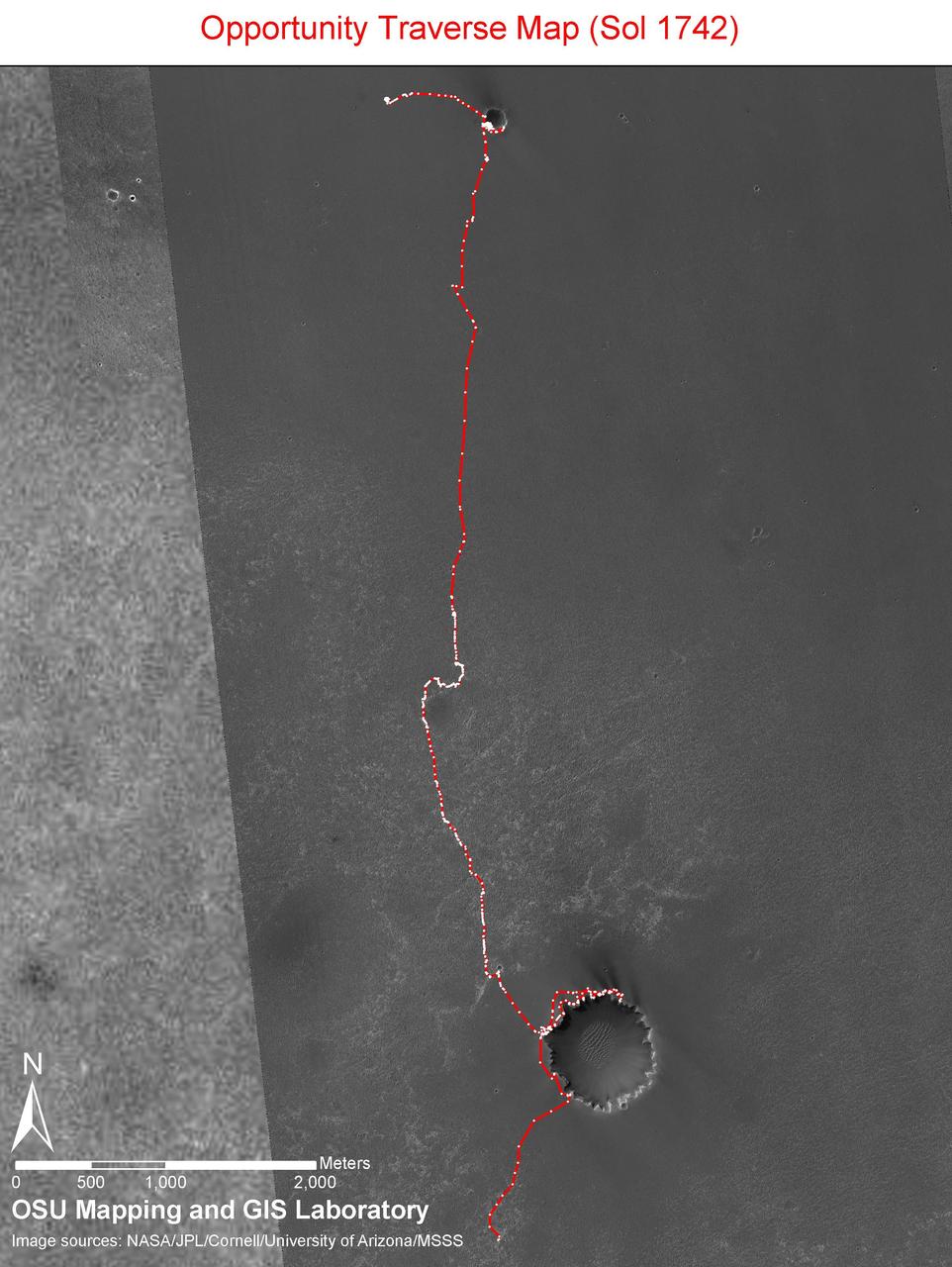
Opportunity Sol 1742 Traverse Map with Endeavour Crater
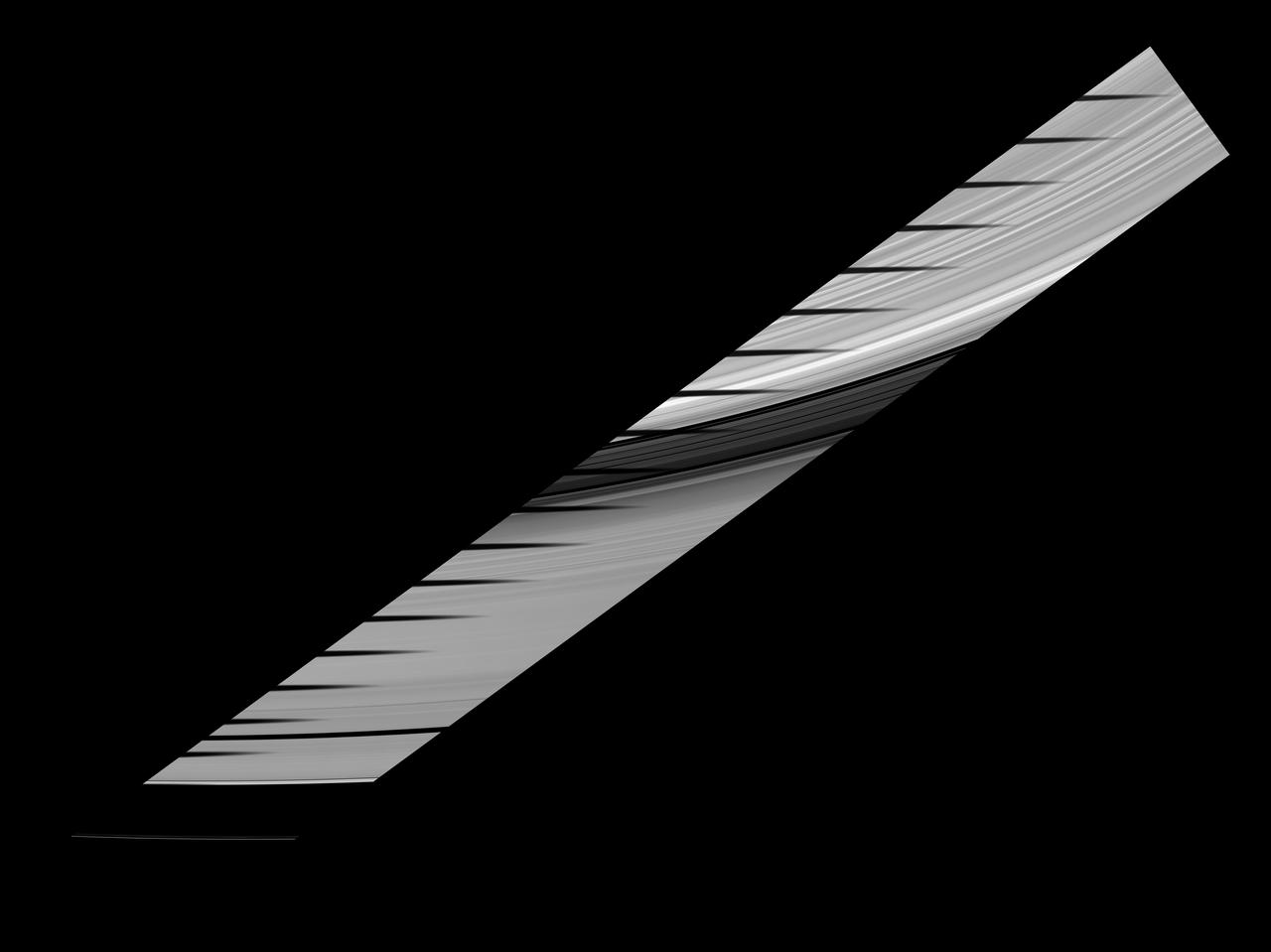
Mimas shadow traverses the sunlit side of Saturn rings in this image and mosaic showcasing the unusual sights seen at Saturn as the planet approaches its August 2009 equinox.
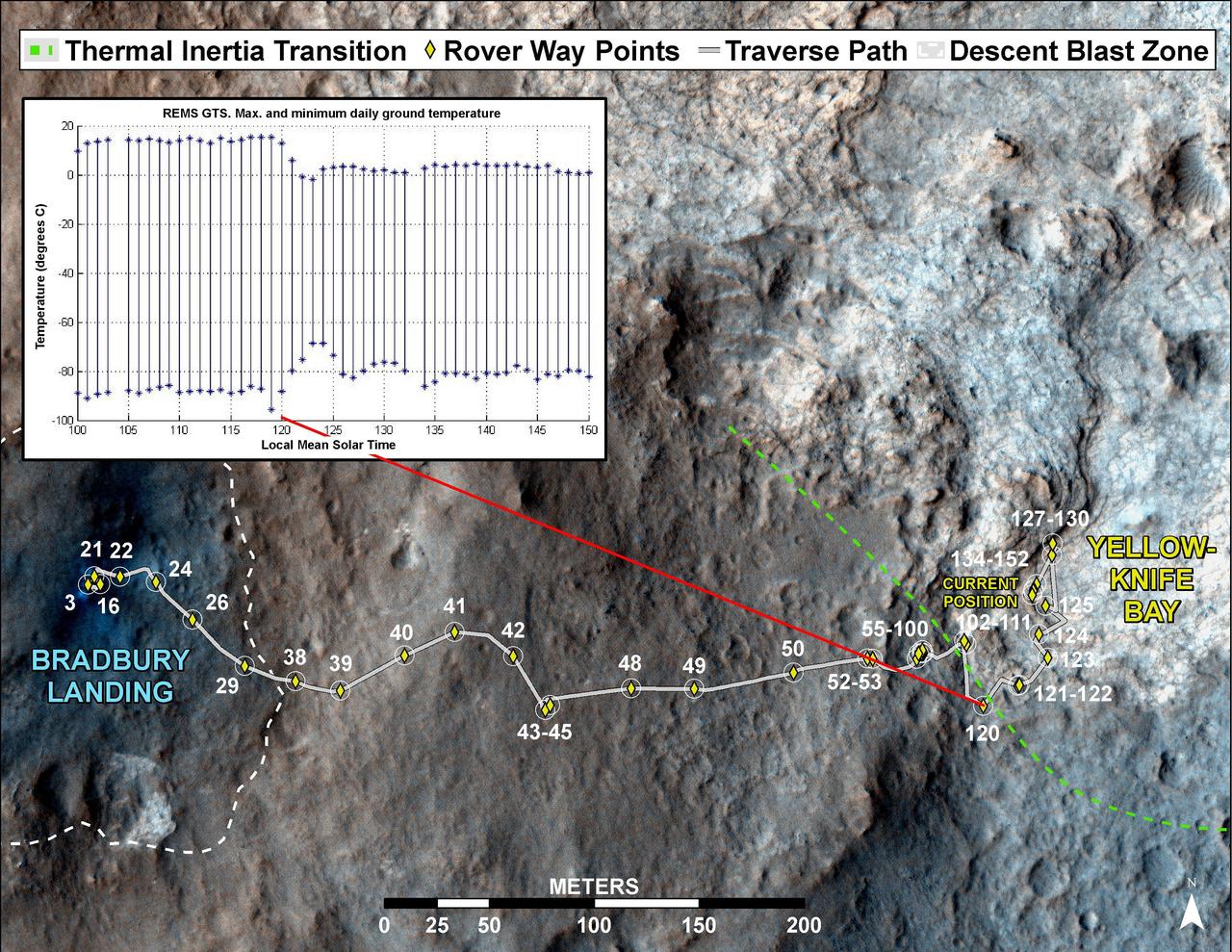
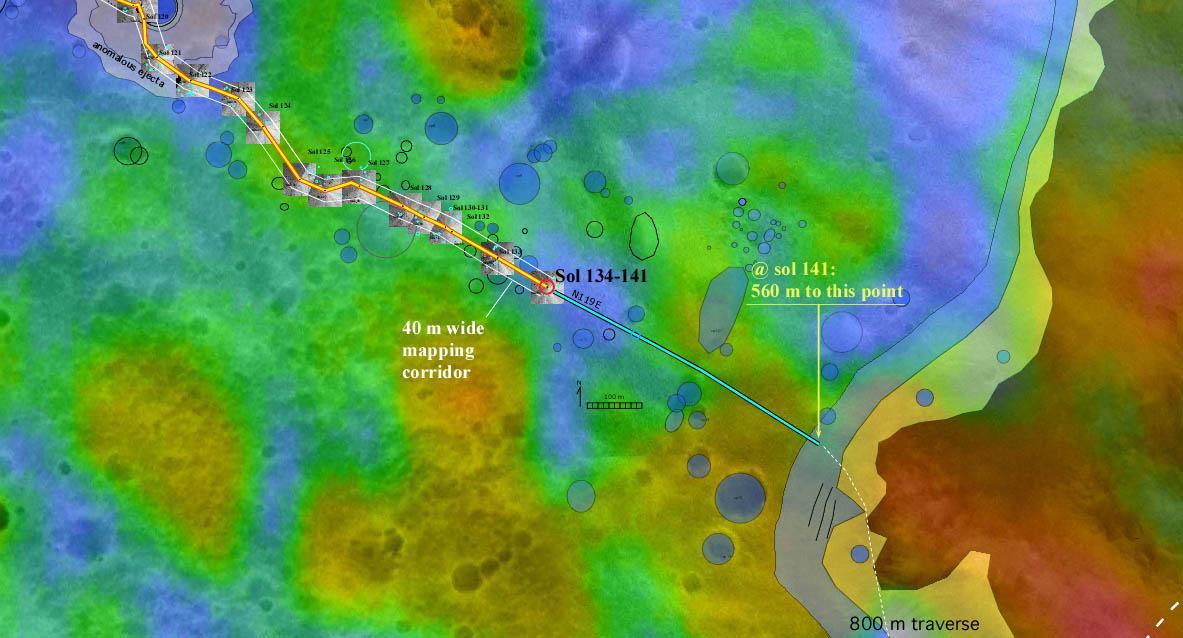
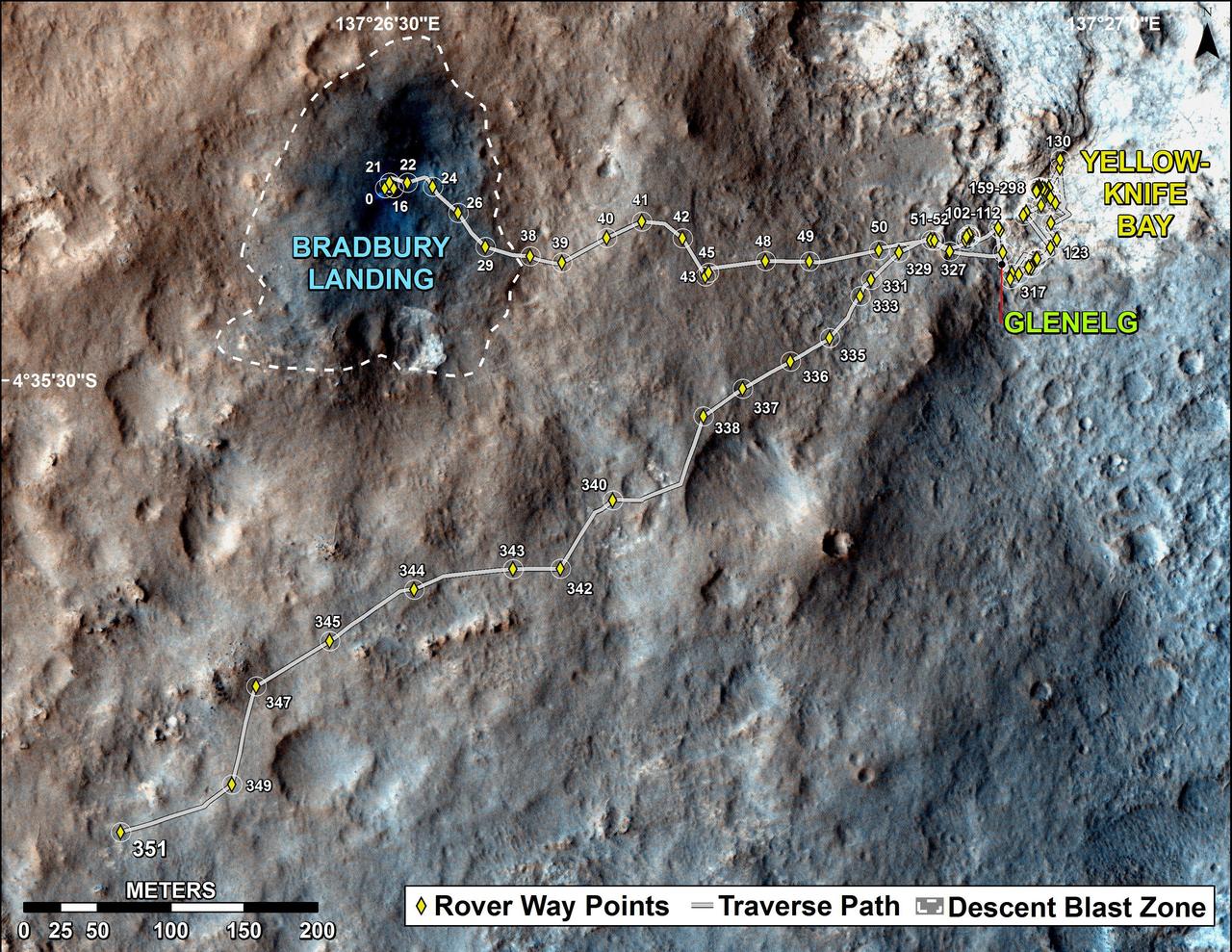
This image maps the traverse of NASA Mars rover Curiosity from Bradbury Landing to Yellowknife Bay, with an inset documenting a change in the ground thermal properties with arrival at a different type of terrain.
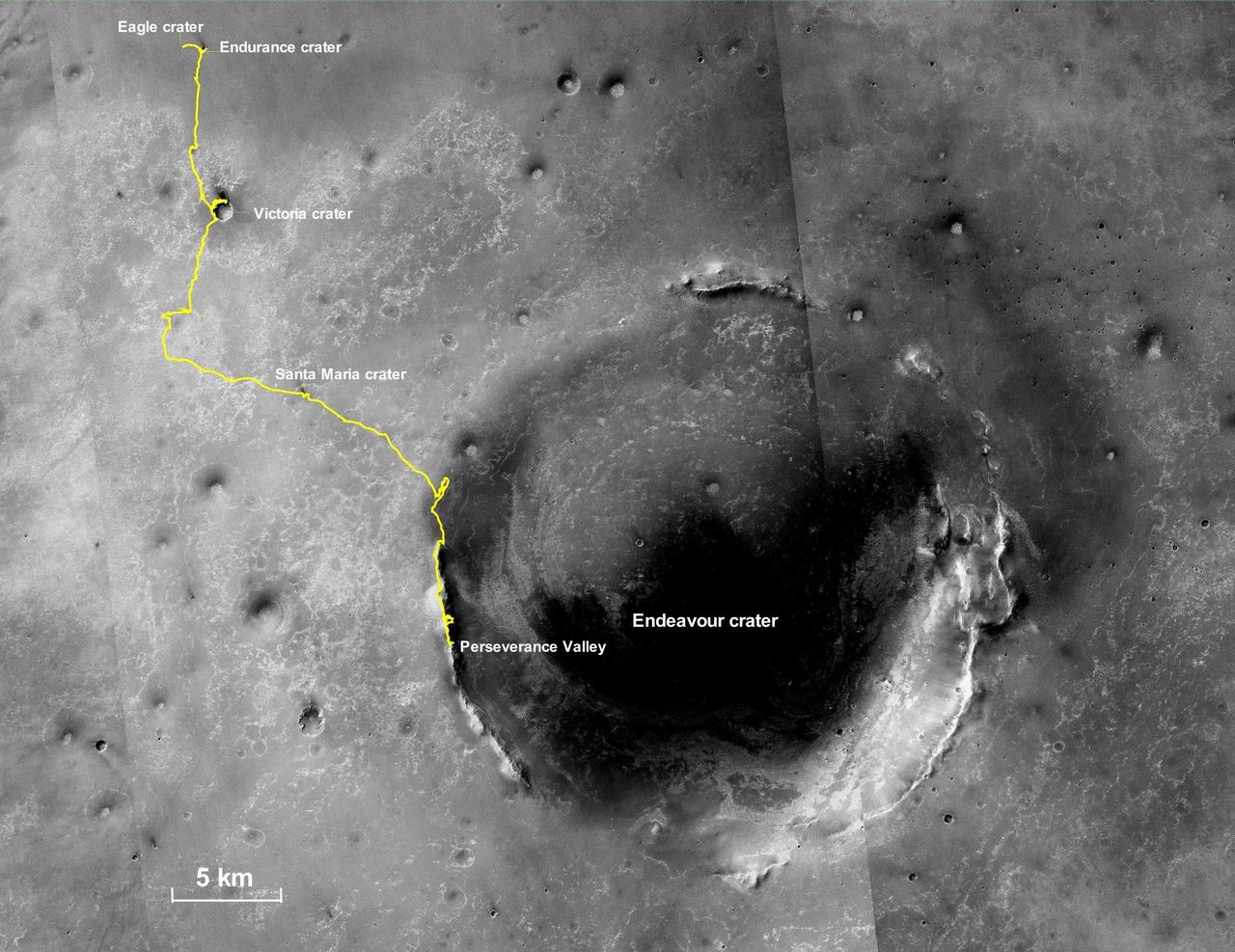
This final traverse map for NASA's Opportunity rover shows where the rover was located within Perseverance Valley on June 10, 2018, the last date it made contact with its engineering team. Visible in this map is a yellow traverse route beginning at Opportunity's landing site, Eagle Crater, and ranging 28.06 miles (45.16 kilometers) to its final resting spot on the rim of Endeavour Crater. The rover was descending down into the crater in Perseverance Valley when the dust storm ended its mission. This map is made from several images taken by the Context Camera on NASA's Mars Reconnaissance Orbiter. Those images are: B02_010486_1779_XN_02S005W, P15_006847_1770_XN_03S005W, and P13_006135_1789_XN_01S005W. Malin Space Science Systems in San Diego built and operates the camera. https://photojournal.jpl.nasa.gov/catalog/PIA23178
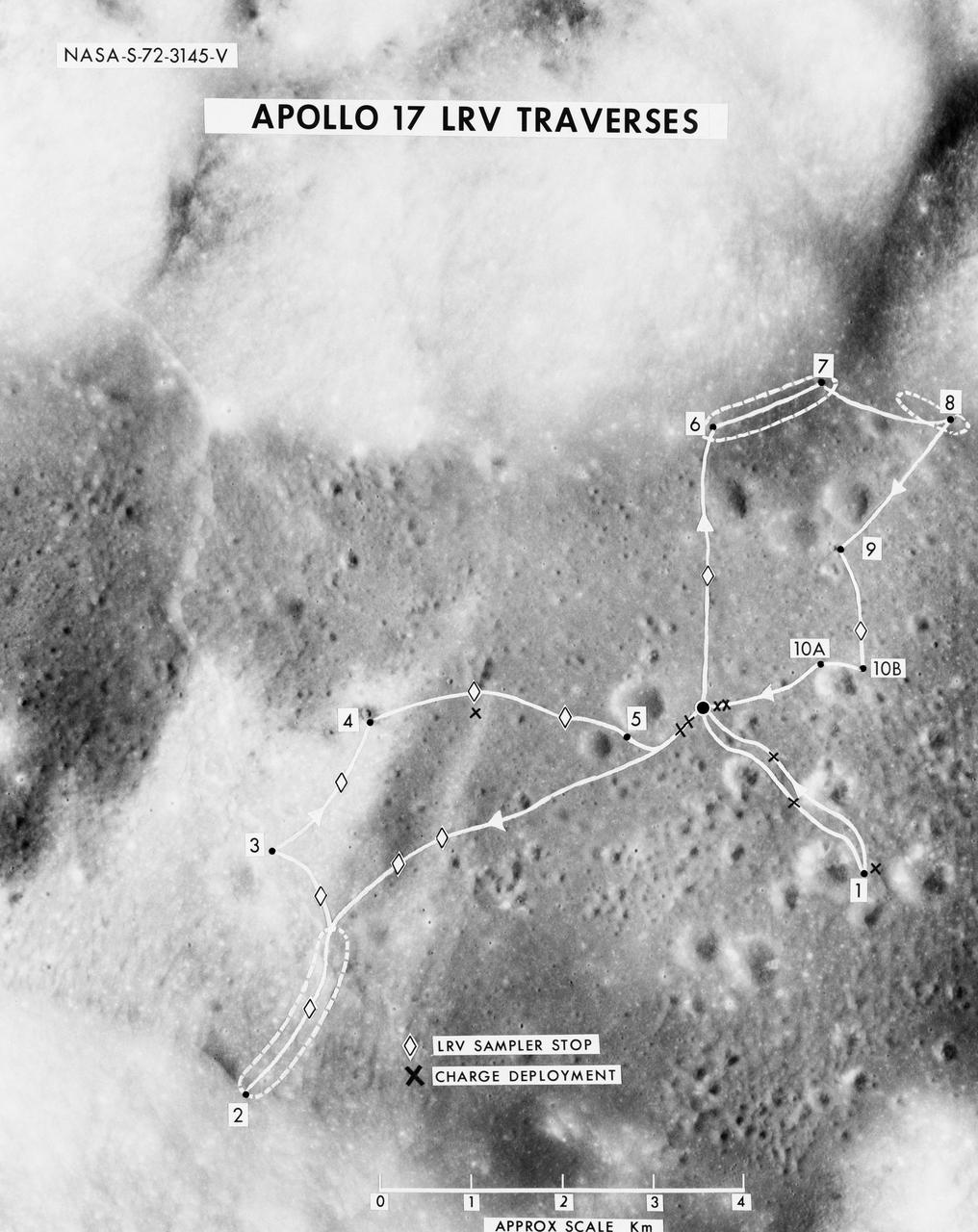
S72-03145 (October 1972) --- A vertical view of the Apollo 17 Taurus-Littrow site with an overlay to illustrate the three planned Apollo 17 traverses using the Lunar Roving Vehicle (LRV). The EVA-1 traverse has a single station (1); the EVA-2 traverse has four stations (2,3,4,5); and the EVA-3 traverse has five stations (6,7,8,9,10). Stations 10-A and 10-B are alternate locations for Station 10. In addition to the major stations mentioned above, brief stops are planned for sampling between stations using the LRV sampler tool (note diamond-shaped figures), and for deploying explosive charges associated with the Lunar Seismic Profiling Experiment (LSPE - note black x-marks).
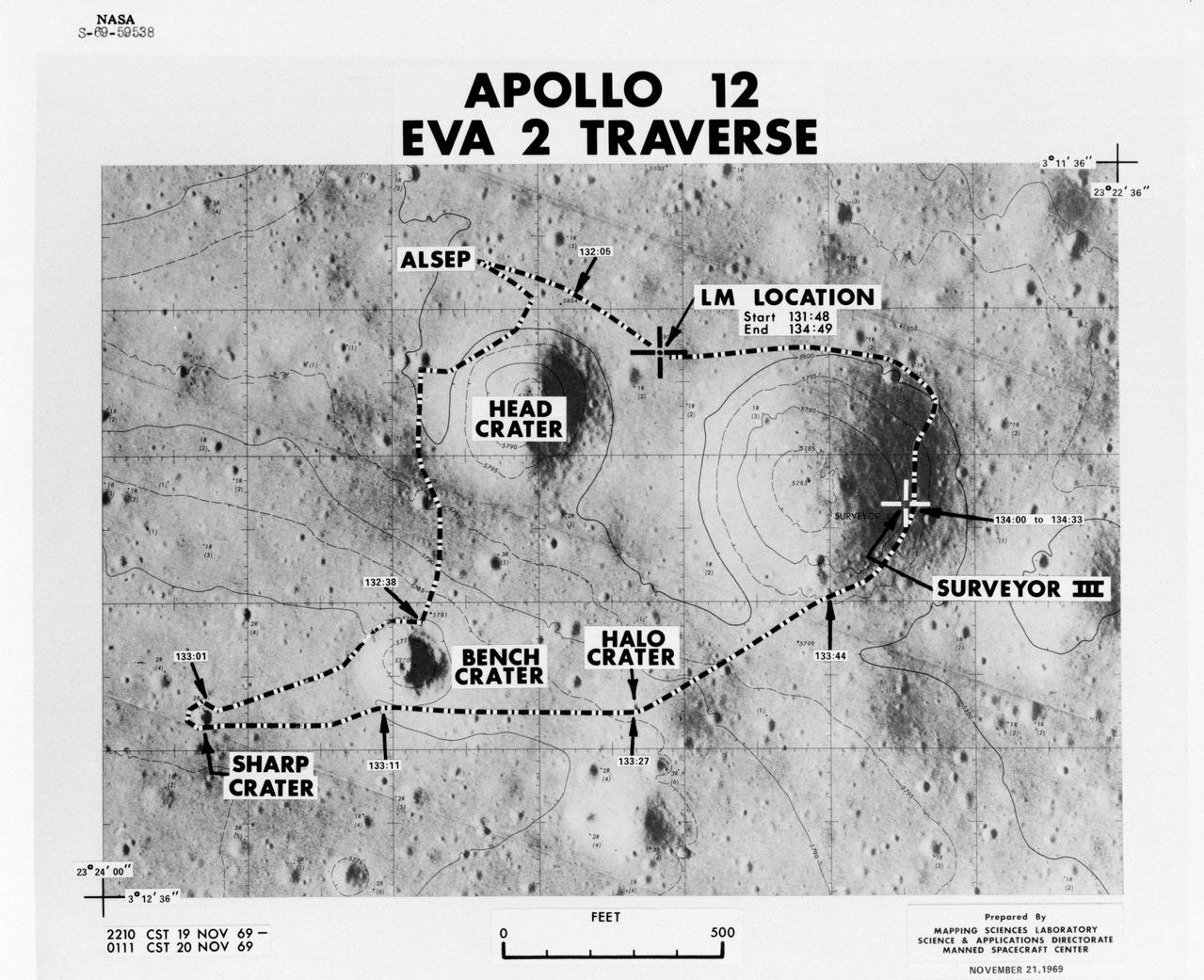
S69-59538 (November 1969) --- Apollo 12 extravehicular activity (EVA-2) Traverse Overlay.

S70-20253 (December 1969) --- Astronauts James A. Lovell Jr. (left) commander, and Fred W. Haise Jr., lunar module pilot, carry out a simulation of a lunar traverse at Kilauea, Hawaii, site. Both crew members of NASA's third team of moon explorers were carrying cameras and communications equipment during the simulated traverse. They maintained contact with men in the roles of spacecraft throughout the traverse. Lovell holds a scoop for the Apollo Lunar Hand Tools (ALHT) and a gnomon, also for the ALHT is deployed in front of Haise. The ALHT carrier is at left background, (almost obscured by Lovell).
This lunar map shows the traverse plans for the Apollo 14 lunar landing mission. Areas marked include Lunar module landing site, areas for the Apollo Lunar Surface Experiment Package (ALSEP) and areas for gathering of core samples.

Scattering of Acoustically Lined Simplified Airframes (SALSA) Test with High Resolution Traversing Microphone Array (HiRTMA) in Structural Acoustics Loads and Transmission Facility (SALT) in Building 1208.
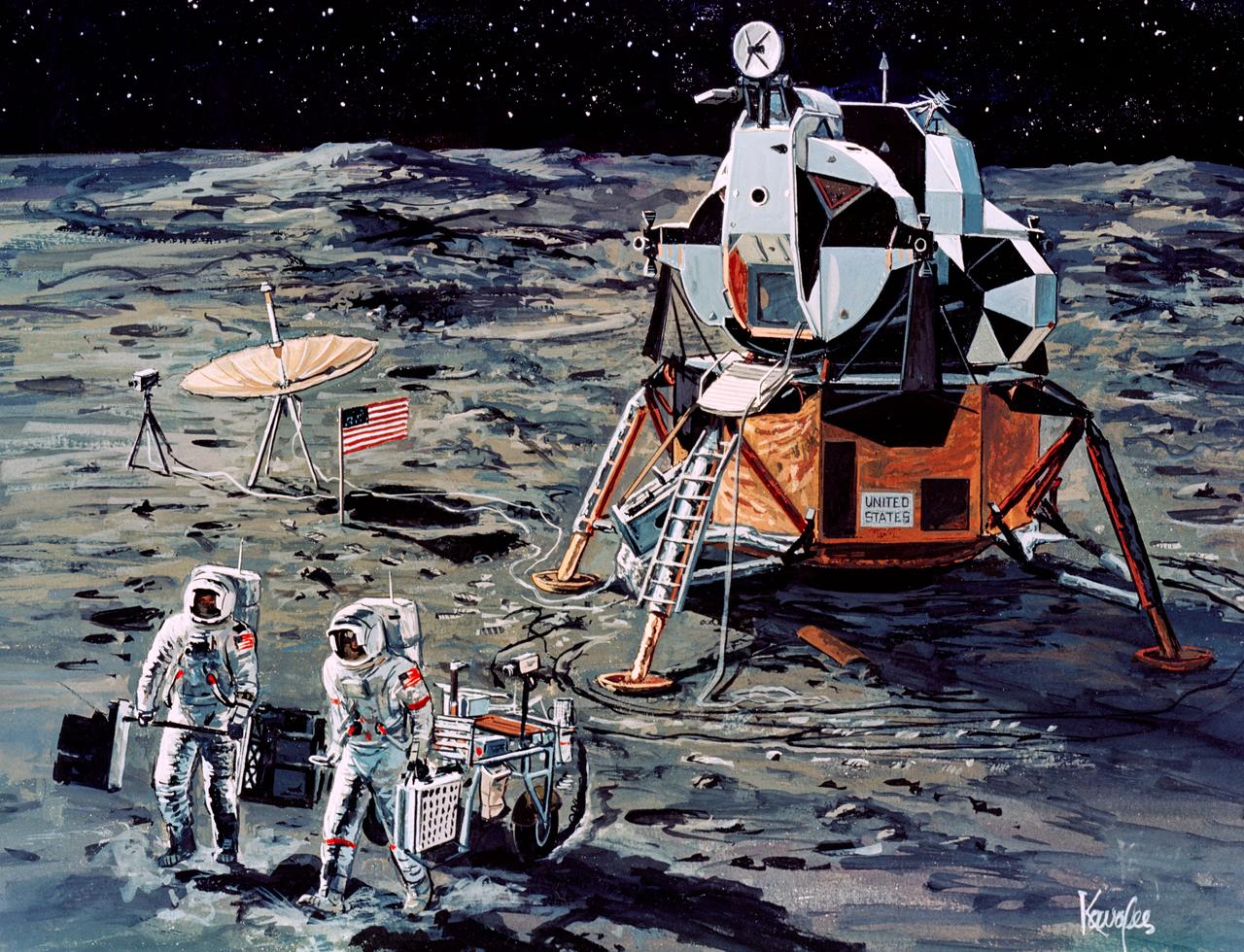
S71-16101 (January 1971) --- A Grumman Aerospace Corporation artist's concept of Apollo 14 crewmen, astronauts Alan B. Shepard Jr., commander, and Edgar D. Mitchell, lunar module pilot, as they set out on their first traverse. Shepard is pulling the Modularized Equipment Transporter (MET) which contains cameras, lunar sample bags, tools and other paraphernalia. Shepard has the Laser Ranging Retro-Reflector (LR-3) in his other hand. Mitchell is carrying the Apollo Lunar Surface Experiments Package (ALSEP) barbell mode.
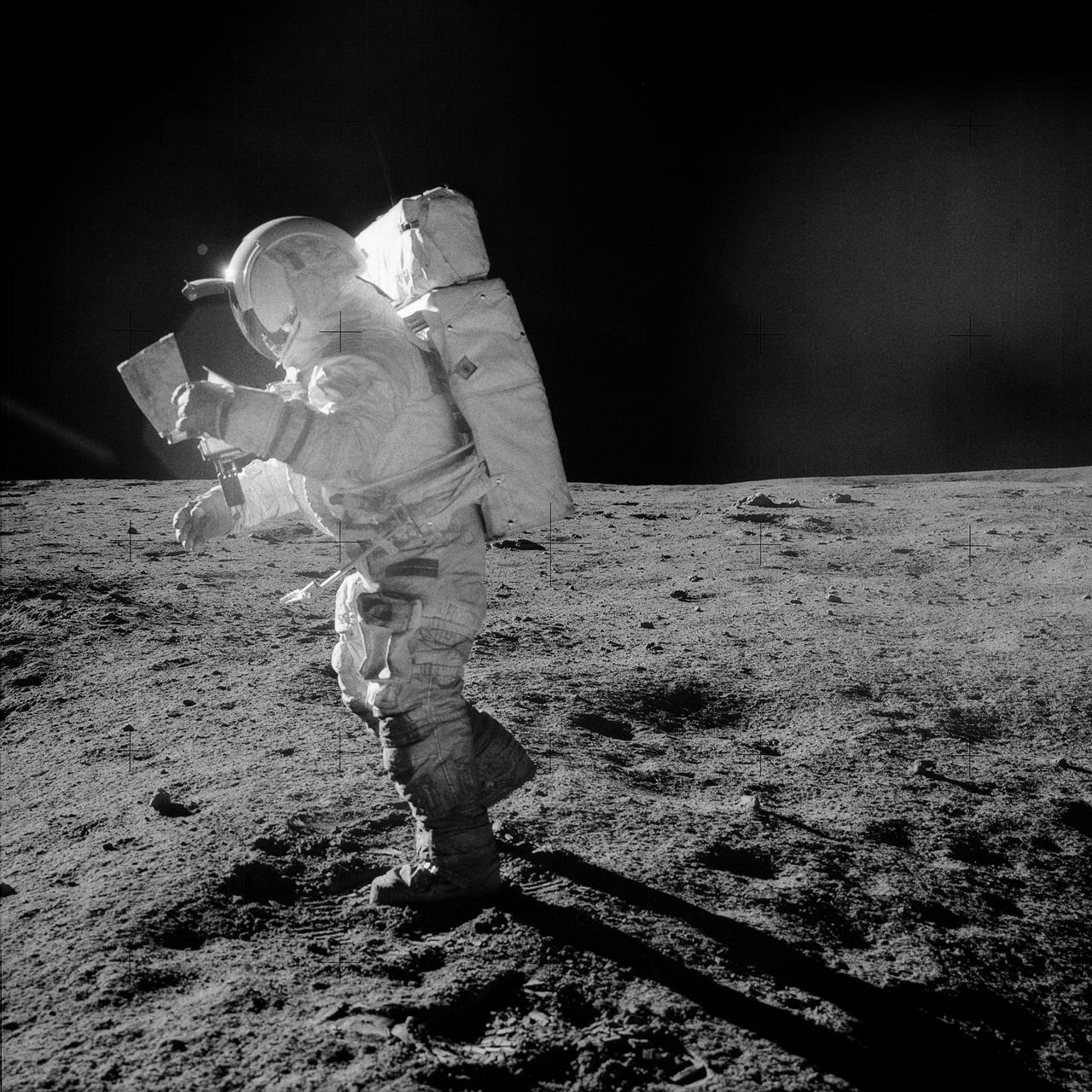
AS14-64-9089 (5-6 Feb. 1971) --- Astronaut Edgar D. Mitchell, lunar module pilot, moves across the lunar surface as he looks over a traverse map during an extravehicular activity (EVA). Lunar dust can be seen clinging to the boots and legs of the space suit. Astronauts Alan B. Shepard Jr., commander, and Mitchell explored the lunar surface while astronaut Stuart A. Roosa, command module pilot, orbited the moon in the Command and Service Modules (CSM).
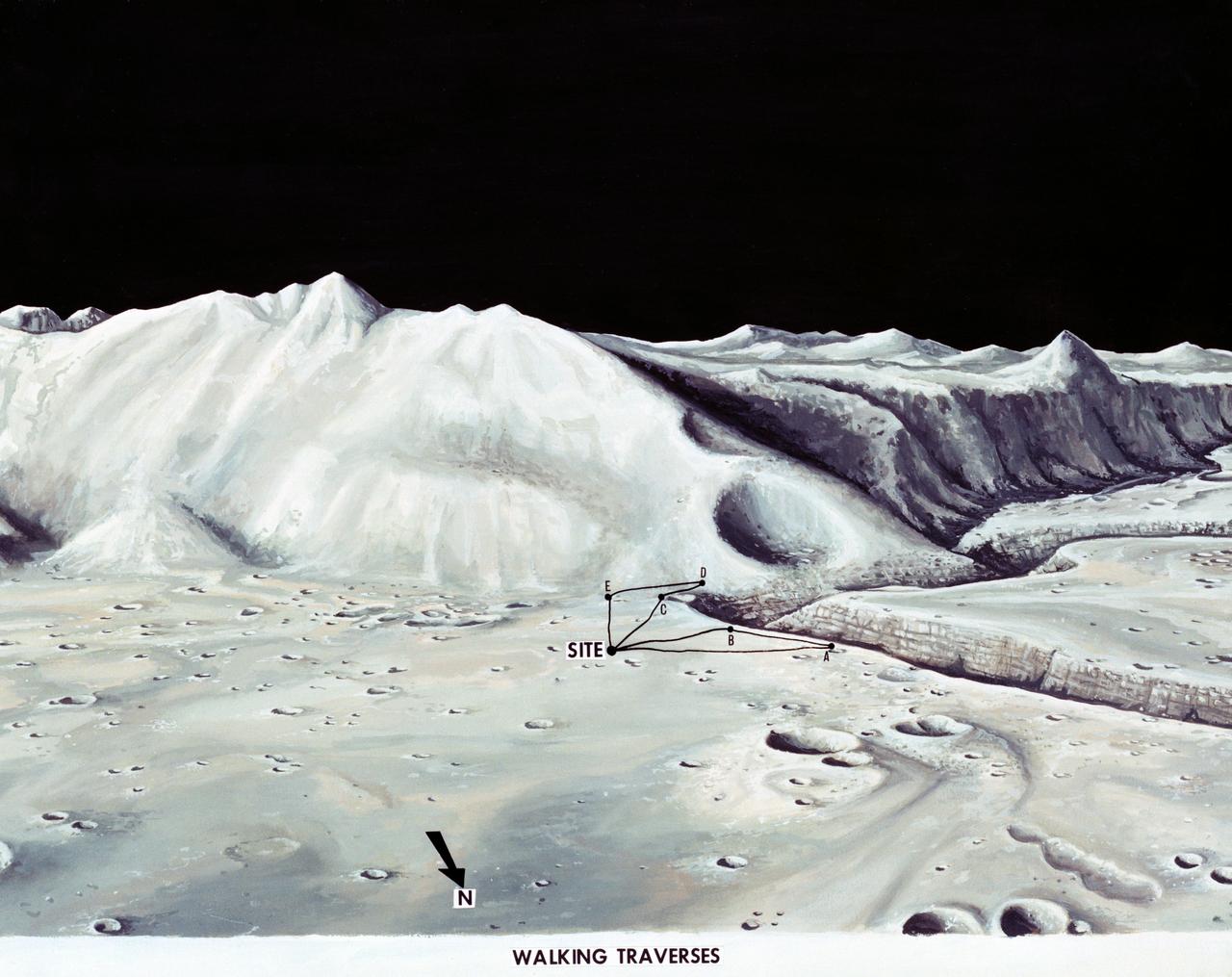
S71-33432 (1 July 1971) --- These alternative traverses can be carried out on foot. They will be used if the Lunar Roving Vehicle (LRV) becomes inoperative. This artist's concept showing part of the Hadley Rille and several of the Apennine Mountains was excerpted from "On the Moon with Apollo 15: A Guidebook to the Hadley-Apennine Region," by Gene Simmons. Artwork by Jerry Elmore.
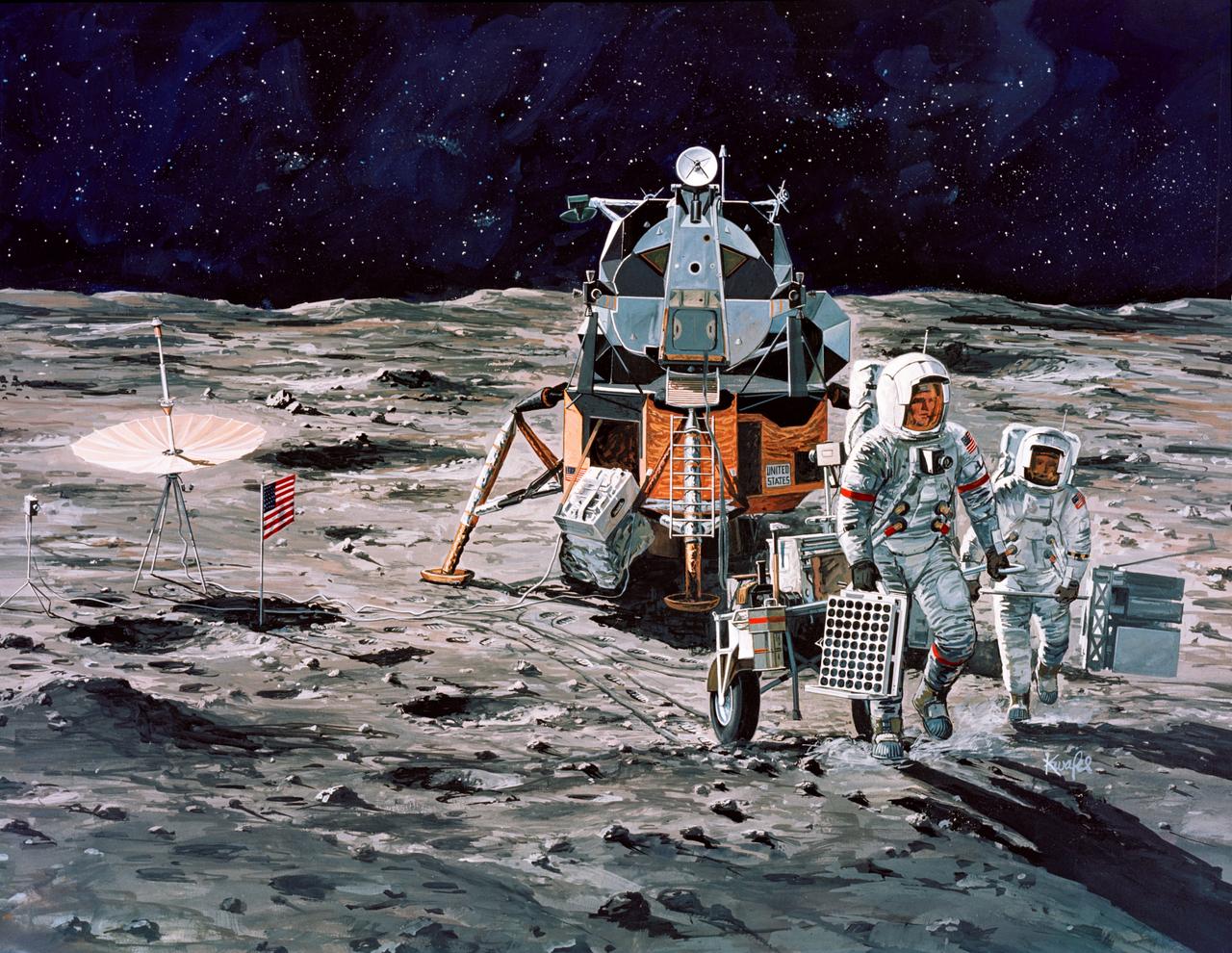
S71-16102 (January 1971) --- A Grumman Aerospace Corporation artist's concept of Apollo 14 crewmen, astronauts Alan B. Shepard Jr., commander, and Edgar D. Mitchell, lunar module pilot, as they set out on their first traverse. Shepard is pulling the Modularized Equipment Transporter (MET) which contains cameras, lunar sample bags, tools and other paraphernalia. Shepard has the Laser Ranging Retro-Reflector (LR3) in his other hand. Mitchell is carrying the Apollo Lunar Surface Experiments Package (ALSEP) barbell mode.
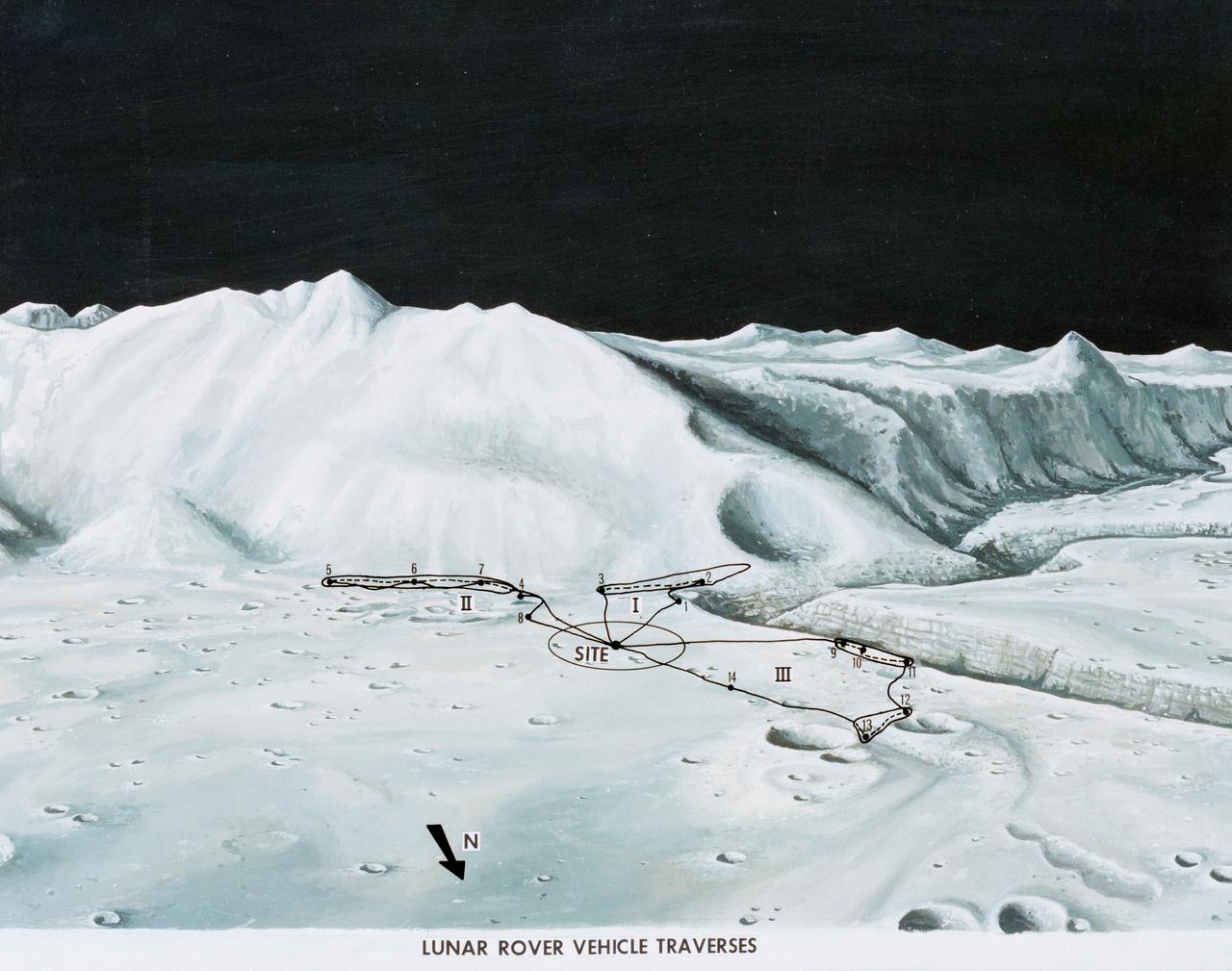
S71-33433 (1 July 1971) --- An artist's concept of the Hadley-Apennine landing site, depicting the traverses planned on the Apollo 15 lunar landing mission using the Lunar Roving Vehicle (LRV). The Roman numerals indicate the three periods of extravehicular activity (EVA). The Arabic numbers represent the station stops. This artist's concept was excerpted from "On the Moon with Apollo 15: A Guidebook to Hadley Rille and the Apennine Mountains," by Gene Simmons. The station stops indicated here are keyed to information given in the publication. Artwork by Jerry Elmore.
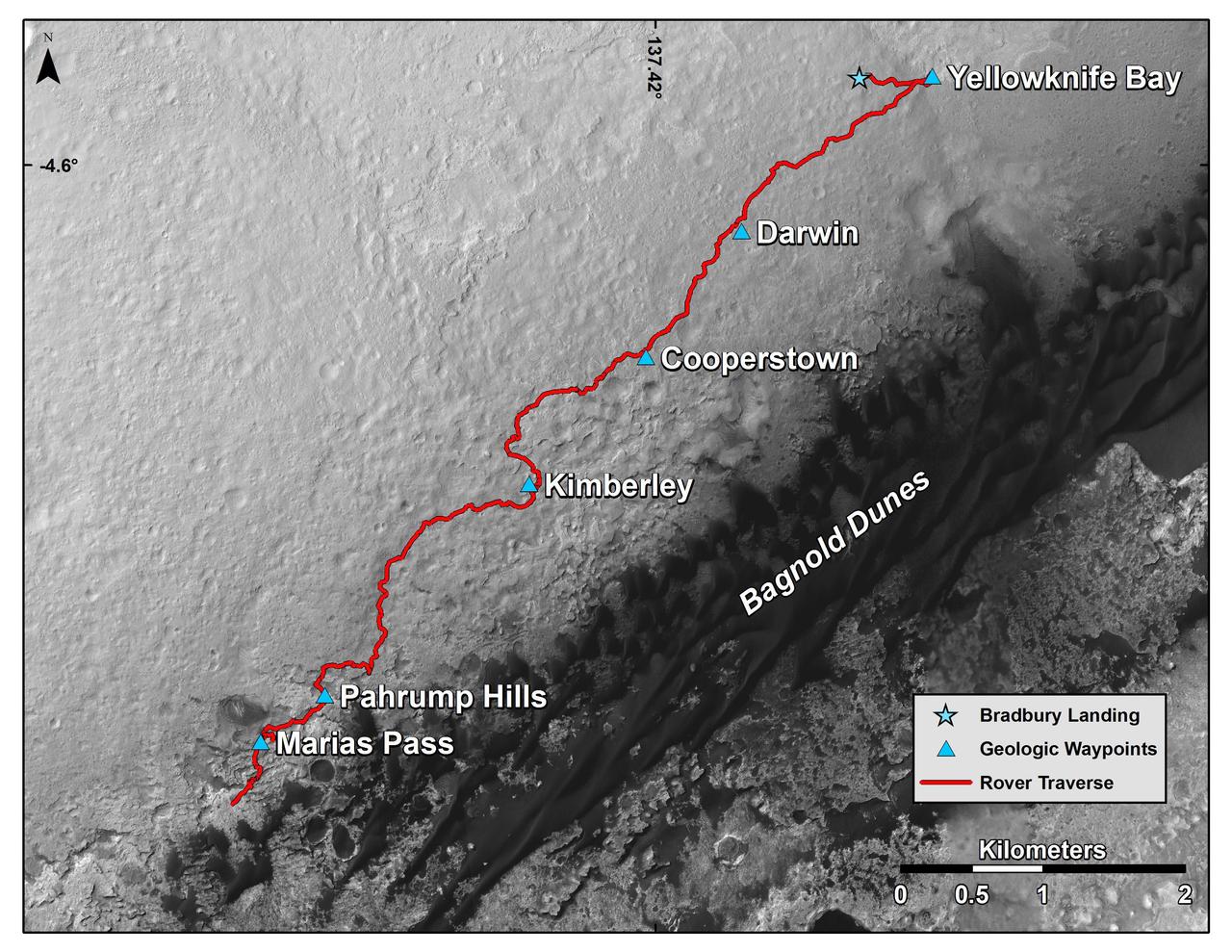
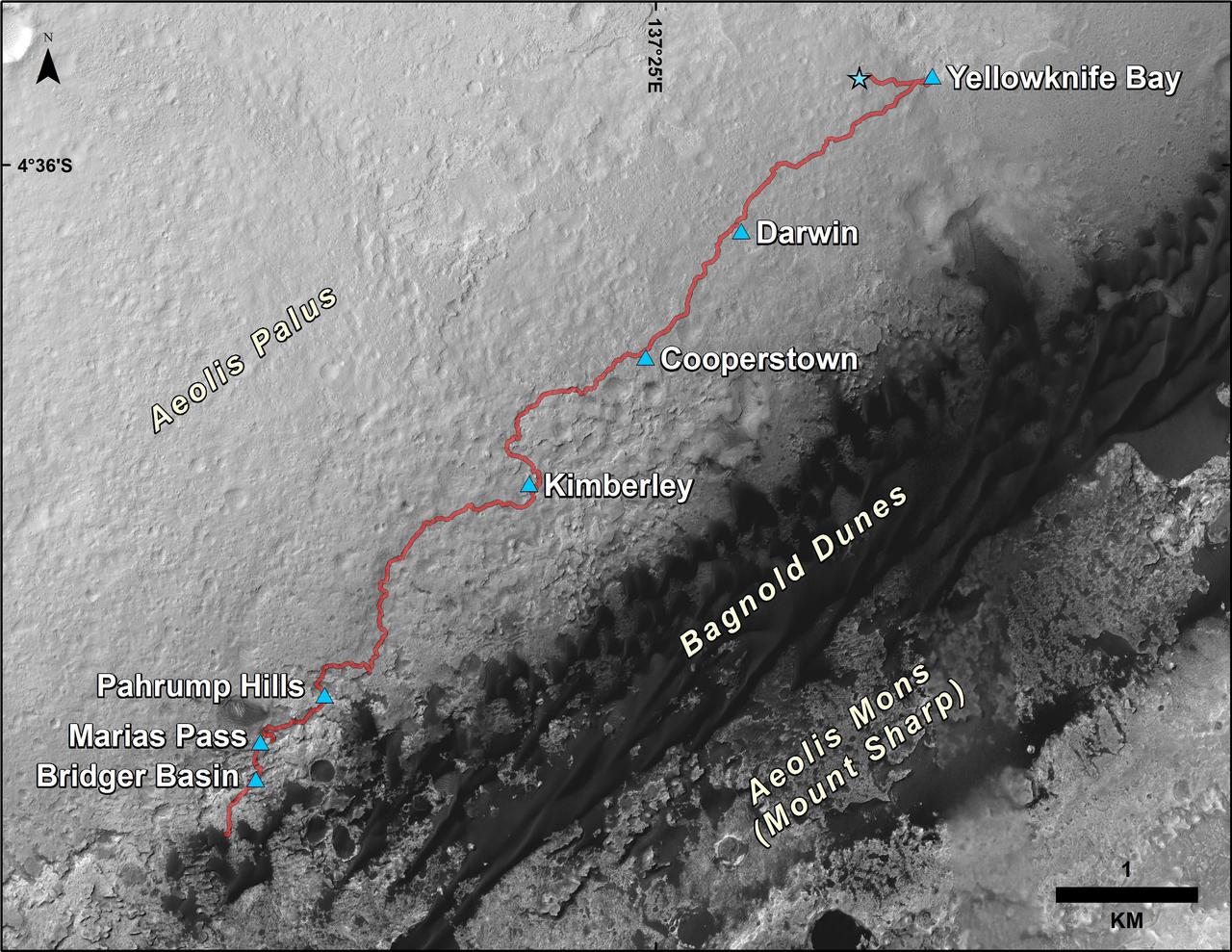
This map shows the route driven by NASA's Curiosity Mars rover from the location where it landed in August 2012 to its location in mid-November 2015, approaching examples of dunes in the "Bagnold Dunes" dune field. The traverse line covers drives completed through the 1,165rd Martian day, or sol, of Curiosity's work on Mars (Nov. 15, 2015). The base image for this map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. The dark ground south of the rover's route is the Bagnold Dunes of dark, wind-blown material at the foot of Mount Sharp. The scale bar at lower right represents two kilometers (1.2 miles). http://photojournal.jpl.nasa.gov/catalog/PIA20162

Scarecrow, a mobility-testing model for NASA Mars Science Laboratory, easily traverses large rocks in the Mars Yard testing area at NASA Jet Propulsion Laboratory.
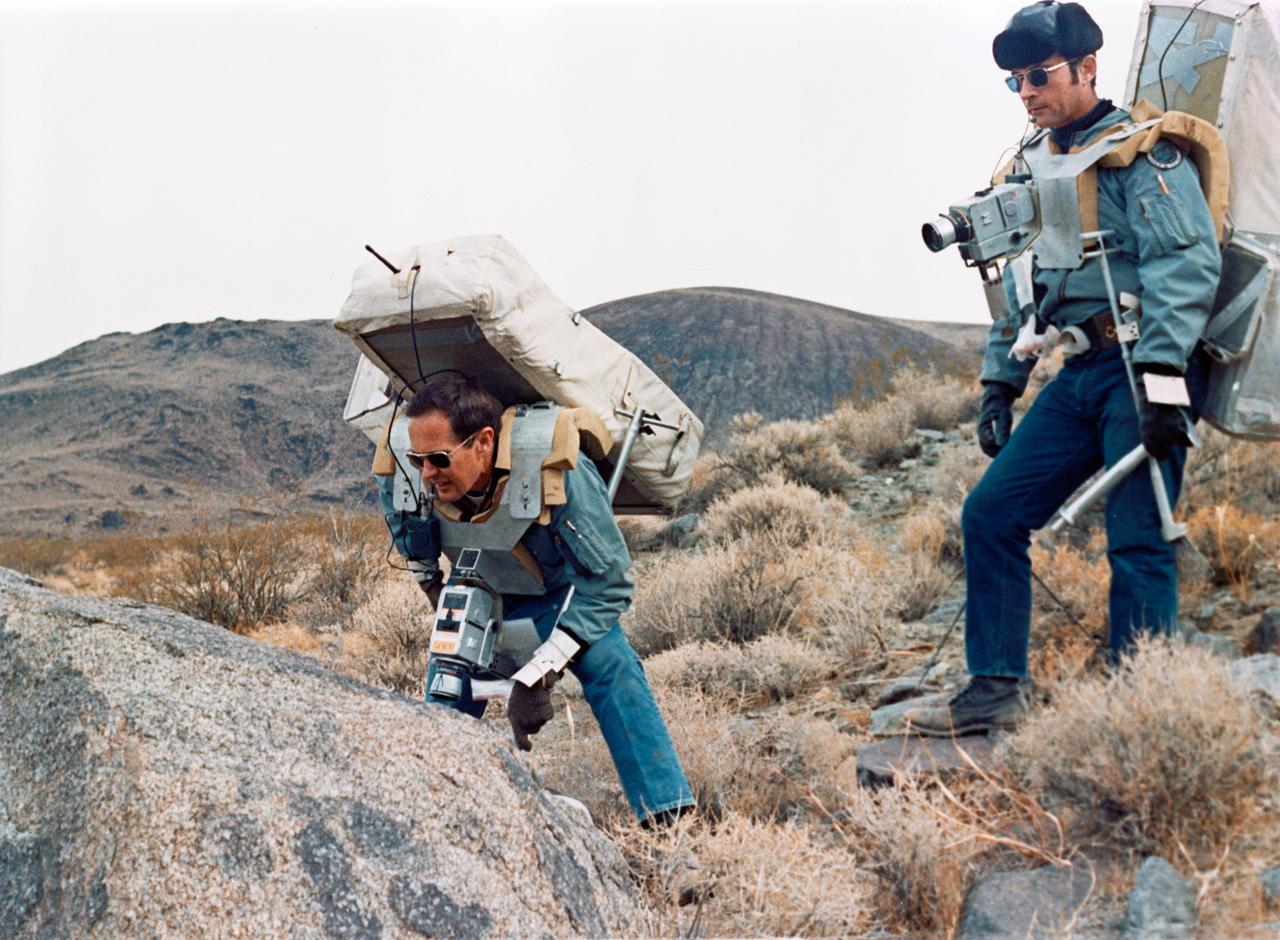
S71-59355 (17-18 Nov. 1971) --- Astronauts John W. Young, right, prime crew commander for Apollo 16, and Charles M. Duke Jr., lunar module pilot, study rock formations along their simulated lunar traverse route. The prime and backup commanders and lunar module pilots for Apollo 16 took part in the two-day geology field trip and simulations in the Coso Range, near Ridgecrest, California, about 160 miles north by northeast of Los Angeles. The training and simulations were conducted Nov. 17 and 18, 1971, at the U.S. Naval Ordnance Test Station.
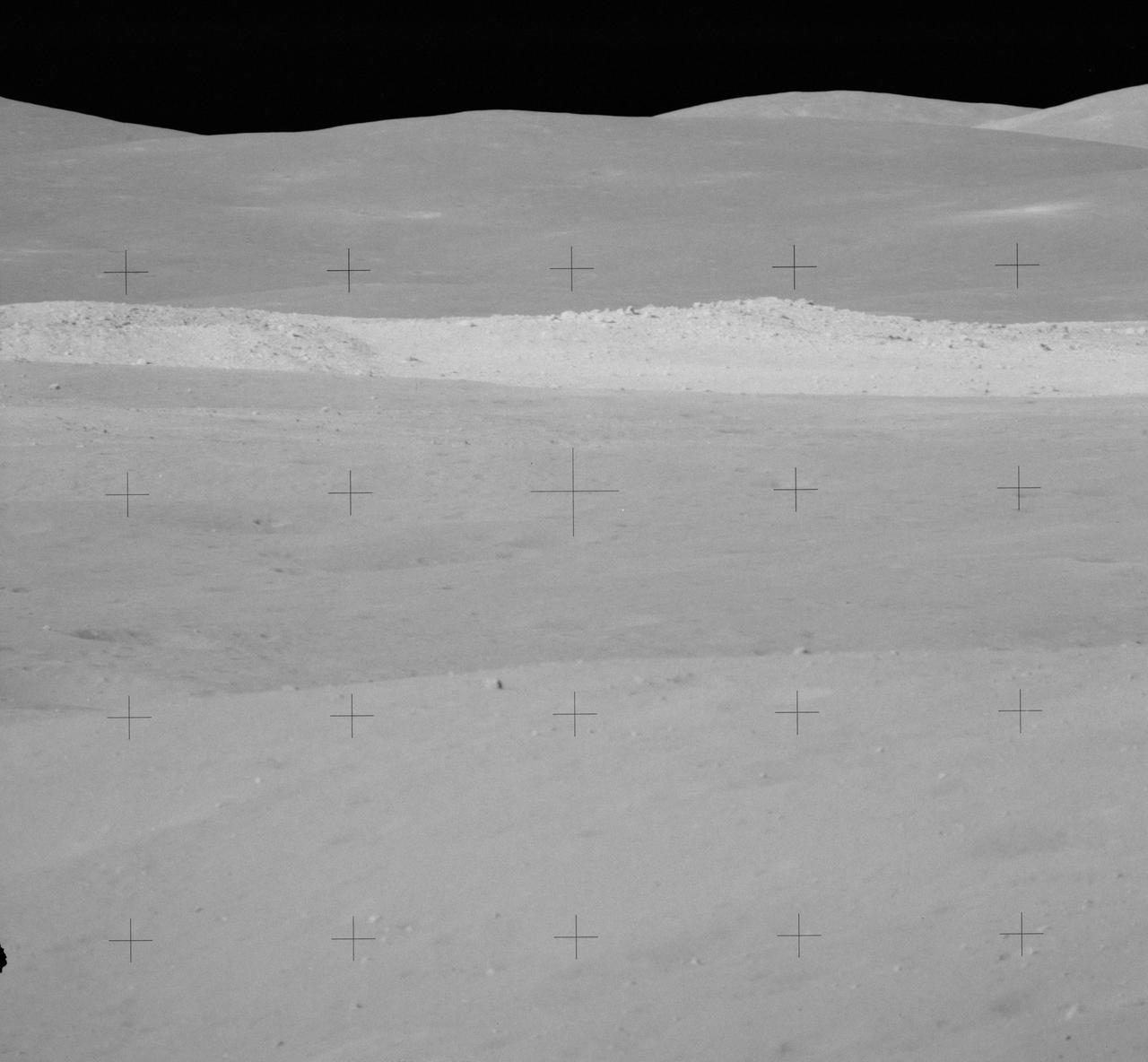
AS16-112-18234 (22 April 1972) --- This view of South Ray Crater was taken during the second Apollo 16 extravehicular activity (EVA) from Station No. 4 -- highest point on the traverse up Stone Mountain -- using a 500mm lens. South Ray Crater is a "fresh" source of angular ejecta in the LM-ALSEP area and samples at Station No. 8.
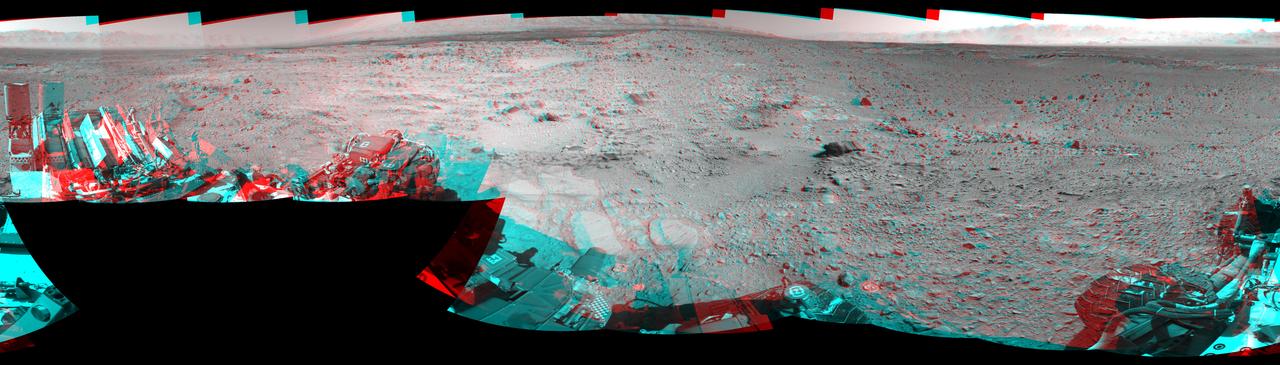
NASA Mars rover Curiosity captured this 3-D view of the rock-studded terrain Curiosity has traversed since October 2013, accelerating the pace of wear and tear on the rover wheels.

This image taken by the HiRISE camera on NASA Mars Reconnaissance Orbiter, captures Opportunity traversing south at the end of the white arrow to new science targets and a winter haven at Solander Point, another portion of the Endeavour rim.
On January 26, 2001, the Kachchh region in western India suffered the most deadly earthquake in India history. Geologists traversed the region looking for ground surface disruptions, that could provide clues to the tectonic processes here.
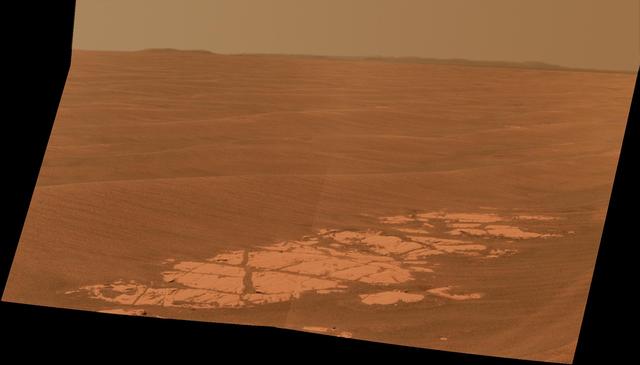
NASA Mars Exploration Rover Opportunity used its panoramic camera Pancam to capture this view approximately true-color view of the rim of Endeavour crater, the rover destination in a multi-year traverse along the sandy Martian landscape.

NASA Mars Exploration Rover Opportunity used its panoramic camera Pancam to capture this false-color view of the rim of Endeavour crater, the rover destination in a multi-year traverse along the sandy Martian landscape.
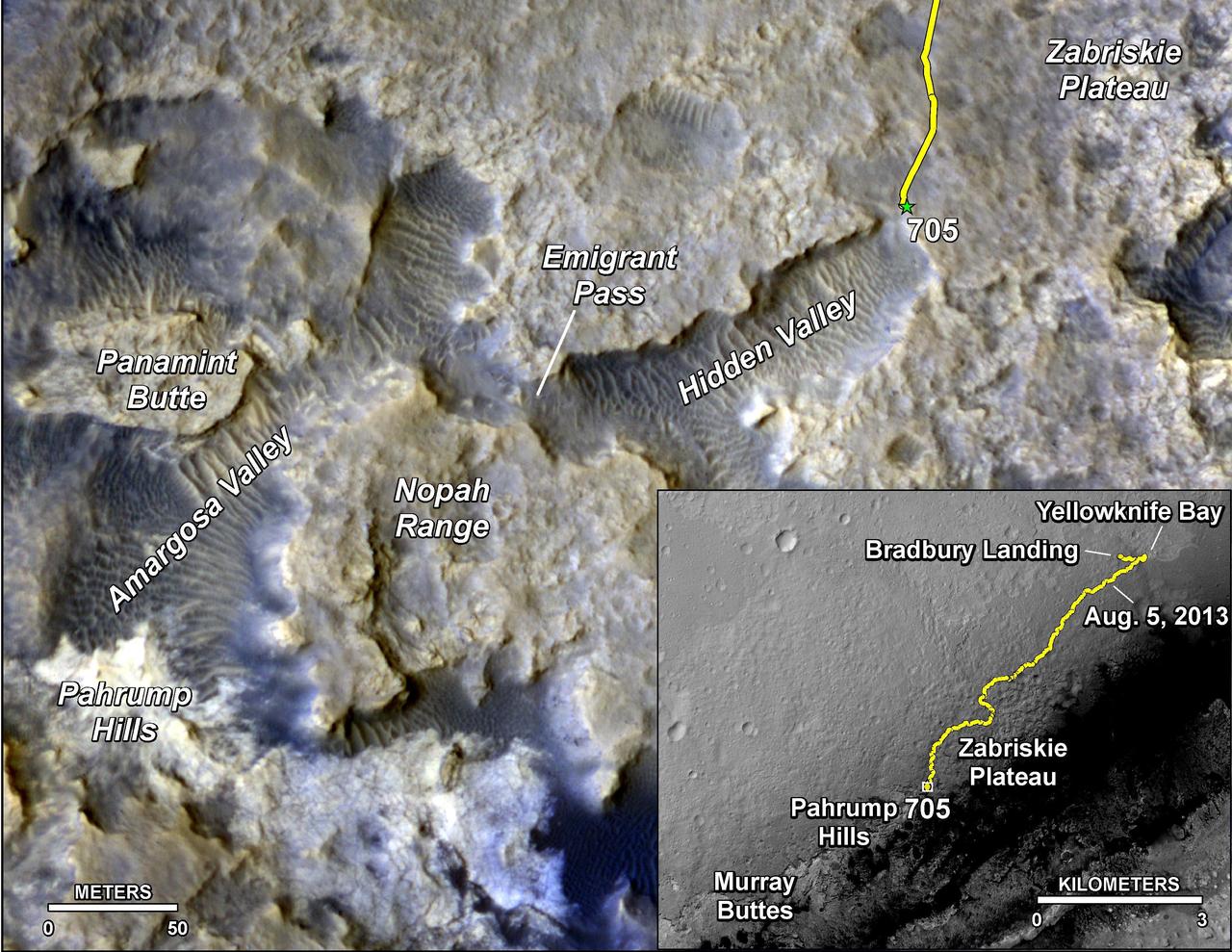
The main map shows landforms near NASA Curiosity Mars rover as the rover second anniversary of landing on Mars nears. The gold traverse line ends at Curiosity position as of July 31, 2014 Sol 705.
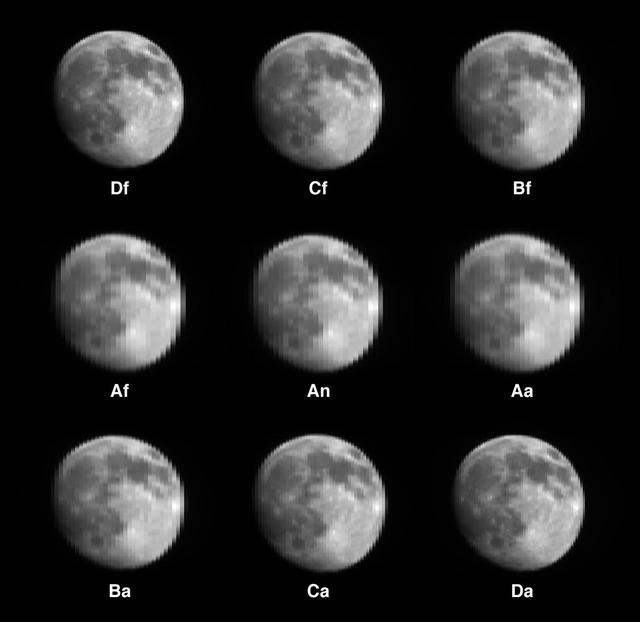
A special maneuver of NASA Terra spacecraft was performed as it traversed the nightside enabling a backward somersault of the spacecraft, allowing the normally Earth-viewing instruments to look at deep space and the waxing gibbous Moon.
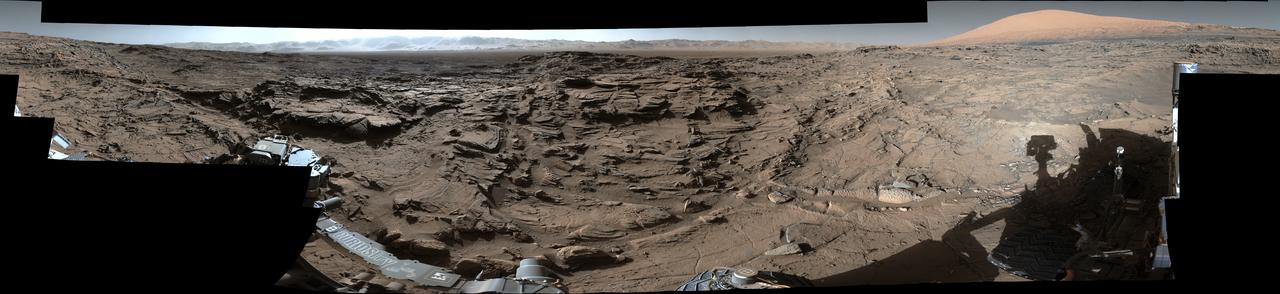
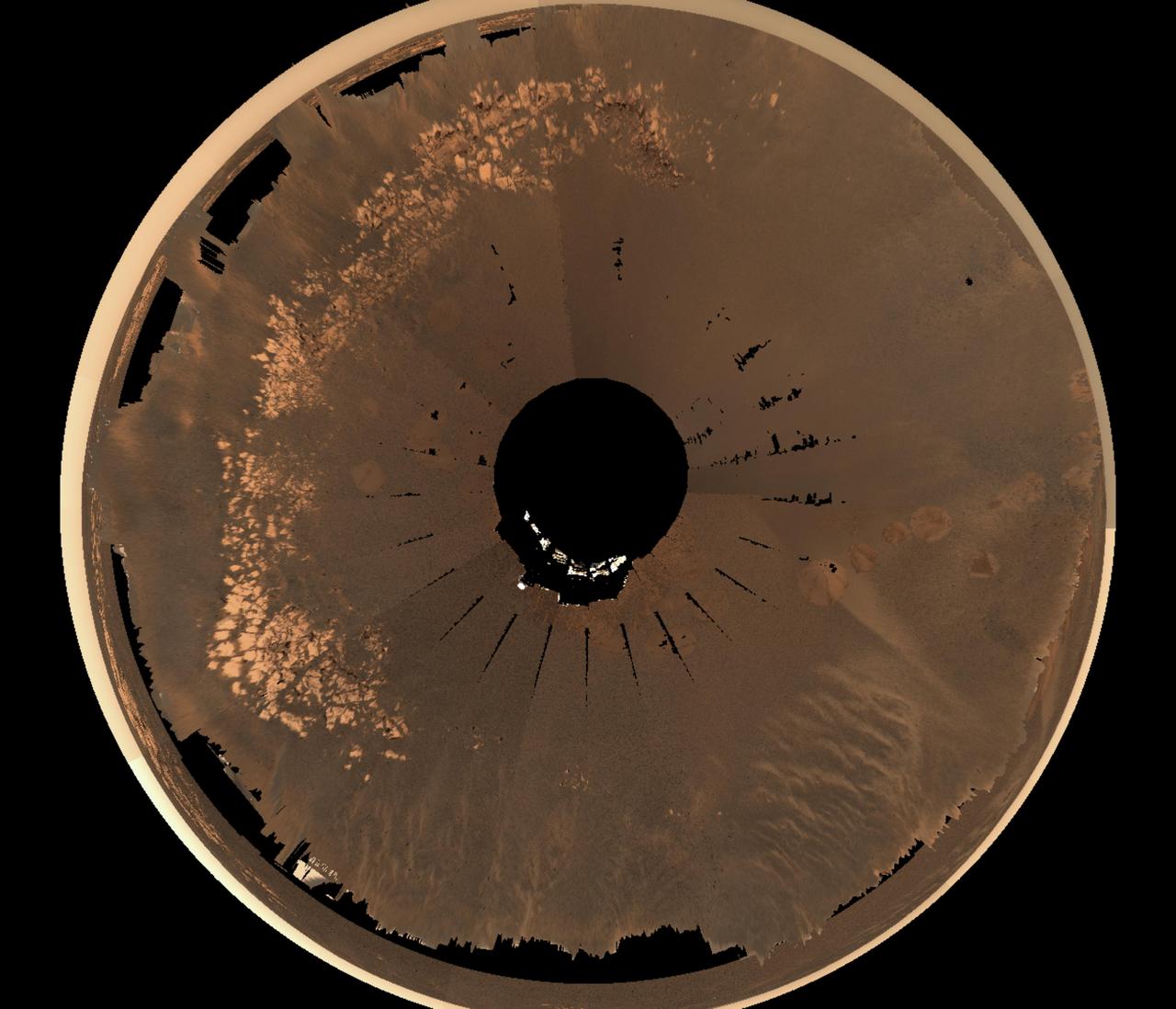
This mid-afternoon, 360-degree panorama was acquired by NASA Curiosity Mars rover on April 4, 2016, as part of long-term campaign to document the context and details of the geology and landforms along Curiosity traverse inside Gale Crater.
NASA Mars Exploration Rover Opportunity is continuing its traverse southward on the western rim of Endeavour Crater during the fall of 2014, stopping to investigate targets of scientific interest along way.
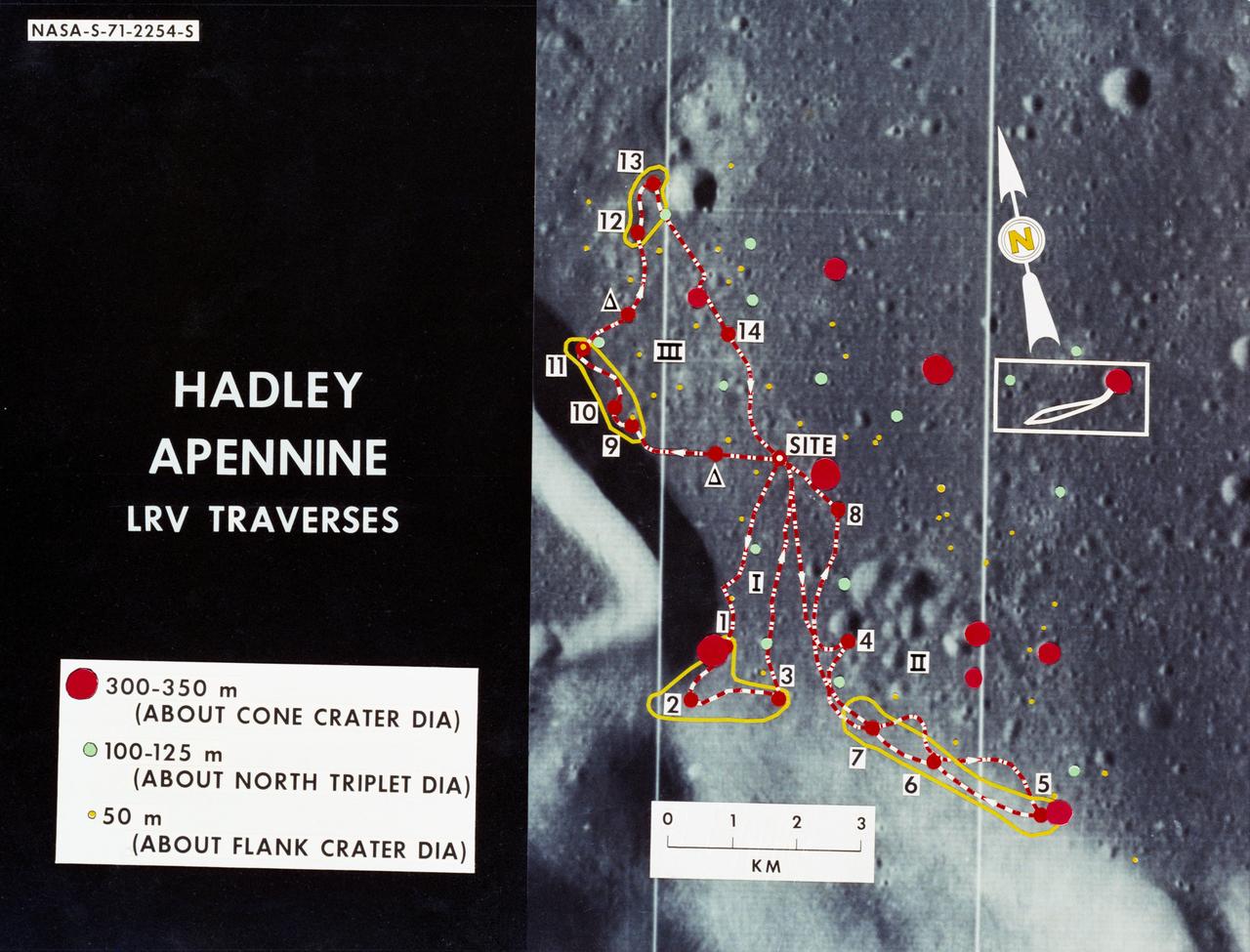
S71-02254 (June 1971) --- An enlarged Lunar Orbiter photograph showing the Lunar Roving Vehicle (LRV) traverse routes overlaid on the Hadley-Apennine landing site. Apollo 15 is to land at the point labeled "site," and a comparison of Apollo 14 crater sizes with those of Apollo 15 is included, also. While astronauts David R. Scott, commander, and James B. Irwin, lunar module pilot, descend in the Lunar Module (LM) "Falcon" to explore the moon, astronaut Alfred M. Worden, command module pilot, will remain with the Command and Service Modules (CSM) in lunar orbit.

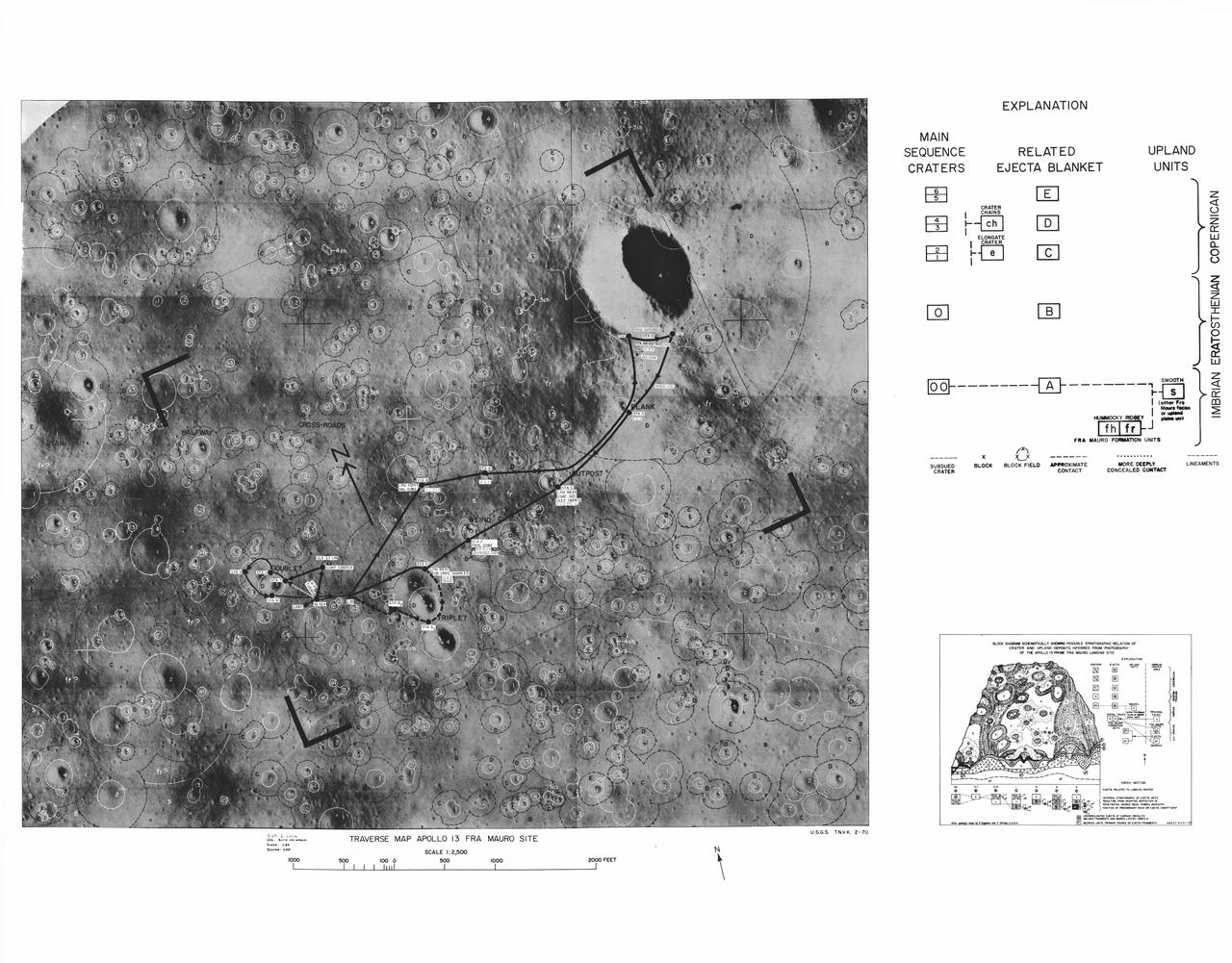
S70-30828 (March 1970) --- A photographic illustration of the Fra Mauro area showing the scheduled traverses planned for the extravehicular activity (EVA) on the Apollo 13 lunar landing mission. The larger red dot marked LM indicates the landing point of the Apollo 13 Lunar Module (LM). The red line shows the path of the first EVA traverse. The second EVA traverse is marked with a black line. The yellow line denotes the extension of each traverse in the event a decision is made to do so. The red dots indicate the points of interest for samples and for observation. Participating in the Apollo 13 EVA will be astronauts James A. Lovell Jr., commander; and Fred W. Haise Jr., lunar module pilot. Astronaut Thomas K. Mattingly II , command module pilot, will remain with the Command and Service Modules (CSM) in lunar orbit.

John H. Wolfe, Pioneer Project Scientist, explains observations made by Pioneer 10 as it traversed the Jovian system

John H. Wolfe, Pioneer Project Scientist, explains observations made by Pioneer 10 as it traversed the Jovian system

ISS044E059041 (08/21/2015) --- Hurricane Danny as seen from the International Space Station as it traversed the Caribbean Sea headed for Puerto Rico, the Dominican Republic and Cuba.
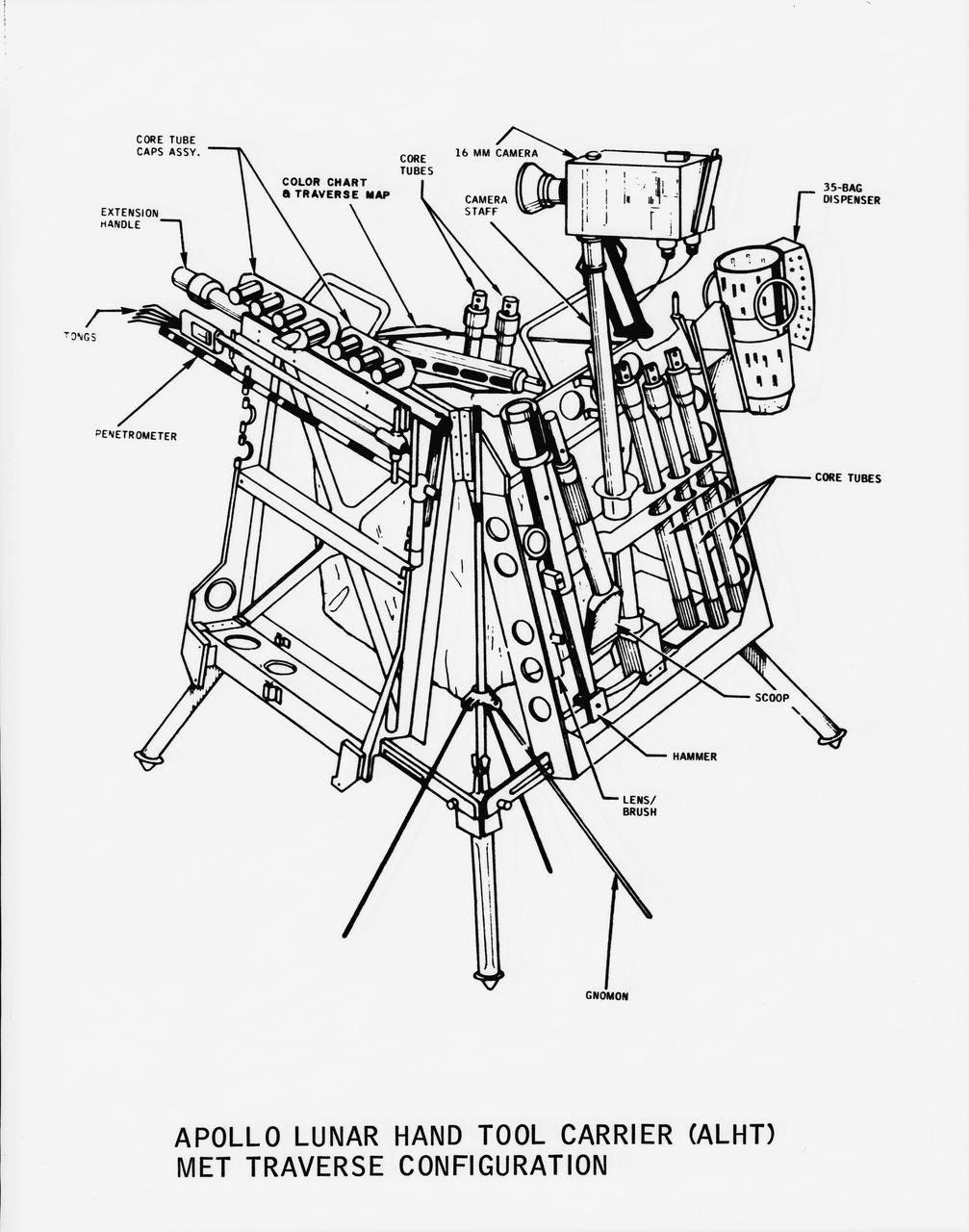
Line drawing of the Apollo Lunar Hand Tool Carrier (ALHT) MET Traverse Configuration for use during the Apollo 14 lunar landing mission

NASA Mars Reconnaissance Orbiter saw the saddle between two valleys named Dingo Gap-in Gale Crater-where the rover Curiosity just traversed. The gap is spanned by a single dune visible both from the ground and from orbit.
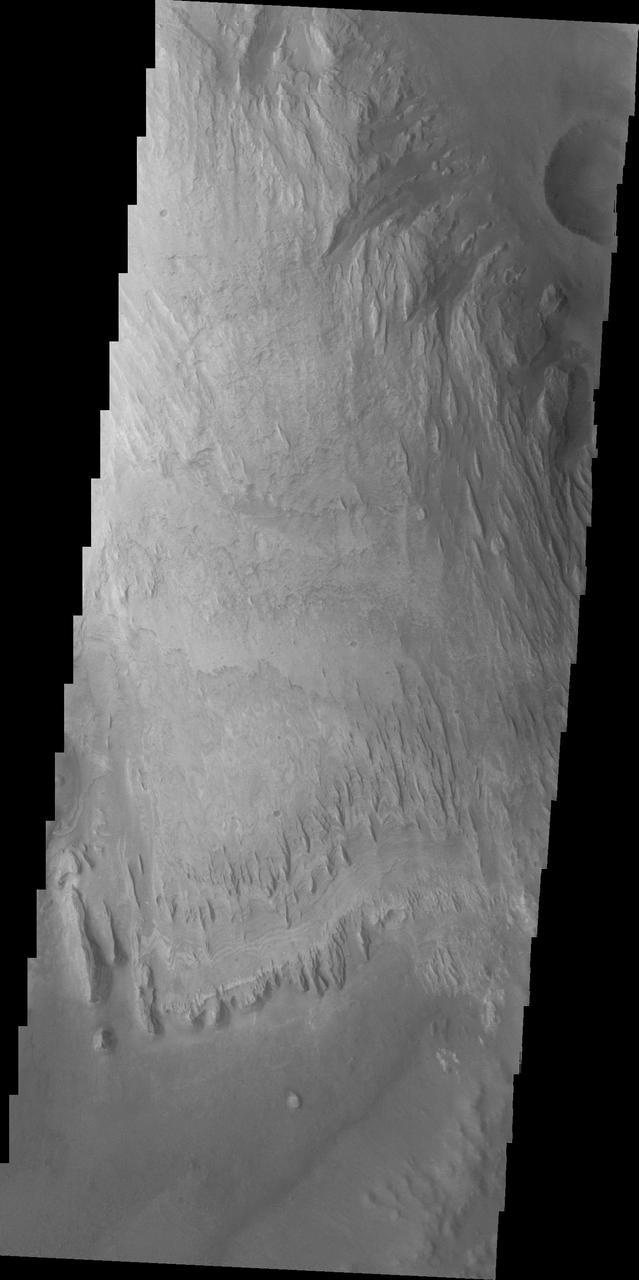
We now begin a traverse across Mt. Sharp moving from east to west. The layering of the material that comprises Mt. Sharp is visible in the bottom third of this image from NASA Mars Odyssey spacecraft; showing the weathering that has affected Mt. Sharp.

The rock-studded terrain NASA Mars rover Curiosity has traversed since October 2013 appears to have accelerated the pace of wear and tear on the rover wheels. Future drives may be charted to cross smoother ground where available.
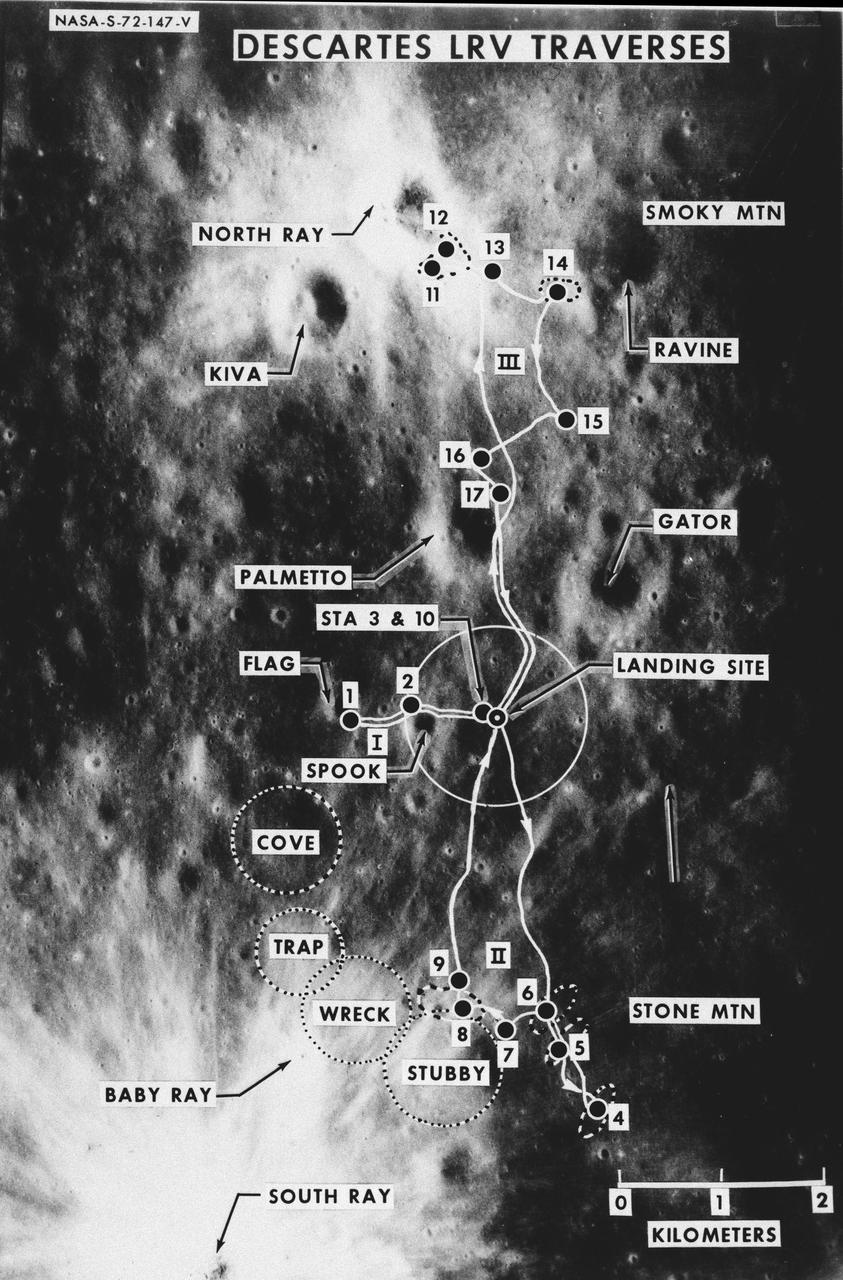
S72-00147 (January 1972) --- An almost vertical view of the Apollo 16 Descartes landing area, as photographed from the Apollo 14 spacecraft. Overlays are provided to point out extravehicular activity (EVA) Lunar Roving Vehicle (LRV) traverse routes and the nicknames of features. Hold picture with South Ray Crater in lower left corner. North will then be at the top. The Roman numerals indicate EVA numbers and the Arabic numbers point out stations or traverse stops.
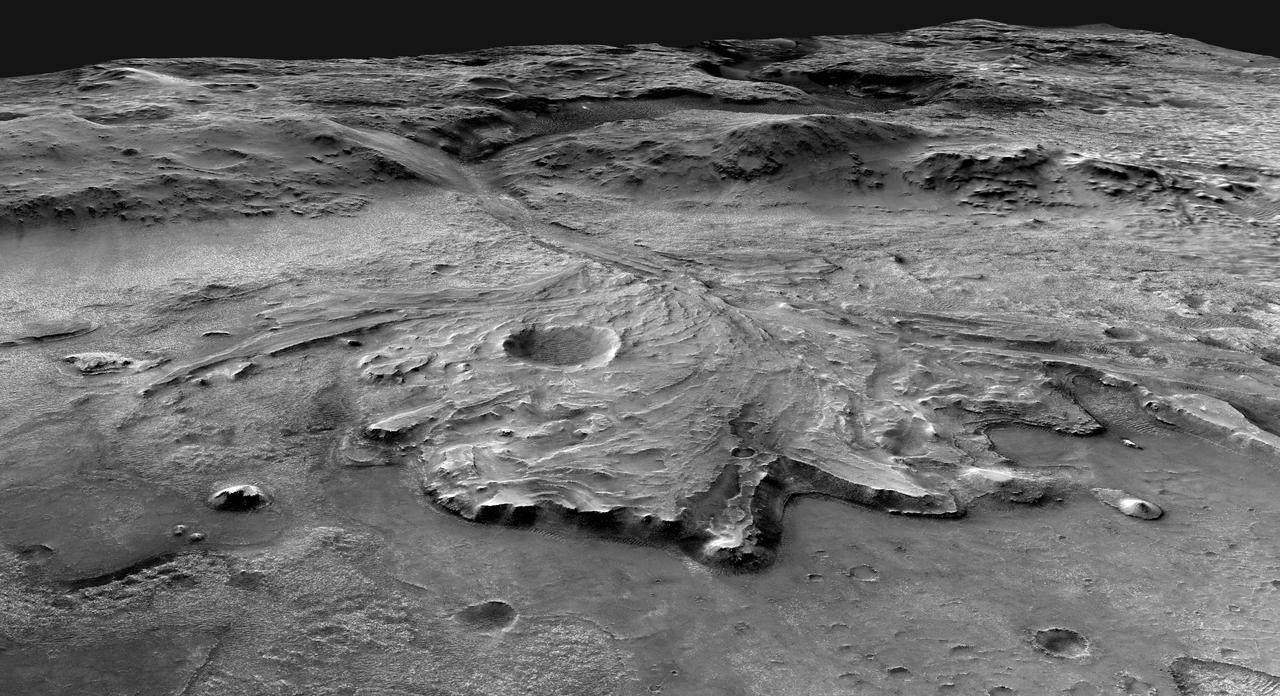
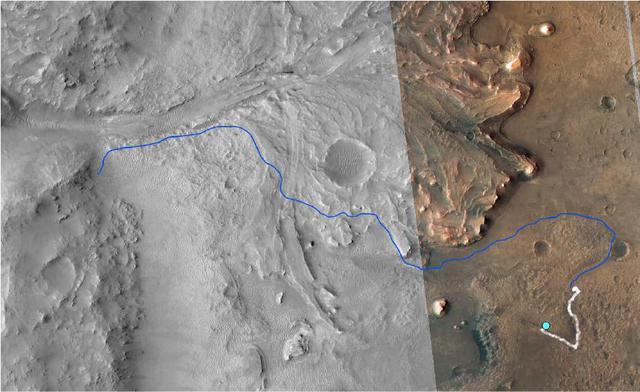
This illustration depicts a possible area through which the Mars 2020 Perseverance rover could traverse across Jezero Crater as it investigates several ancient environments that may have once been habitable. The route begins at the cliffs defining the base of a delta produced by a river as it flowed into a lake that once filled the crater. The path then traverses up and across the delta toward possible ancient shoreline deposits, and then climbs the 2,000-foot-high (610-meter-high) crater rim to explore the surrounding plains. About half of this traverse could be completed in Perseverance's prime mission (one Mars year, or two Earth years). For reference, the prominent crater near the center of the image is about 0.6 miles (1 kilometer) across. This mosaic is composed of multiple precisely aligned images from the Context Camera on the Mars Reconnaissance Orbiter and has a resolution of 20 meet (6 meters) per pixel. https://photojournal.jpl.nasa.gov/catalog/PIA24310
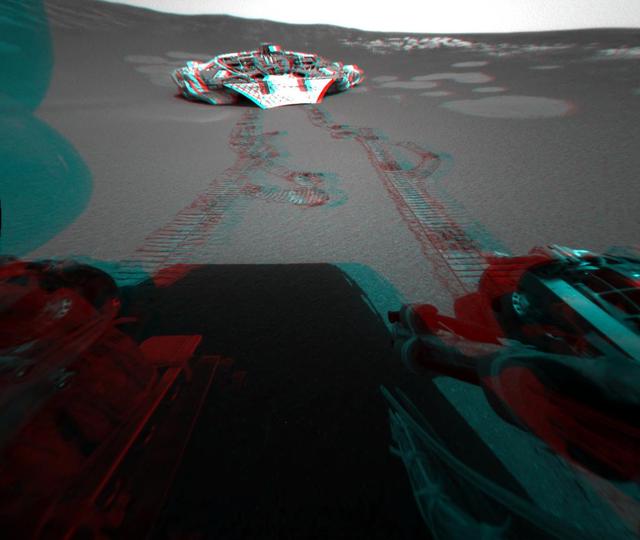
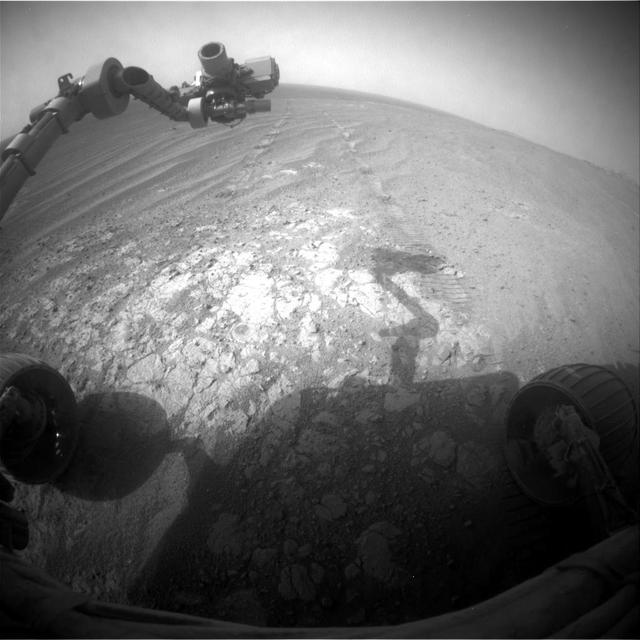
This 3-D view from behind NASA Mars Exploration Rover Opportunity shows the path the rover has traveled since rolling 1 meter 3 feet away from its empty lander on the seventh martian day, or sol, of its mission. 3D glasses are necessary.

NASA astronauts Andre Douglas and Kate look ahead at their traverse during a simulated moonwalk in the San Francisco Volcanic Field in Northern Arizona on May 14, 2024. Credit: NASA/Josh Valcarcel

NASA astronauts Kate Rubins and Andre Douglas look ahead at their traverse during a simulated moonwalk in the San Francisco Volcanic Field in Northern Arizona on May 17, 2024. Credit: NASA/Josh Valcarcel

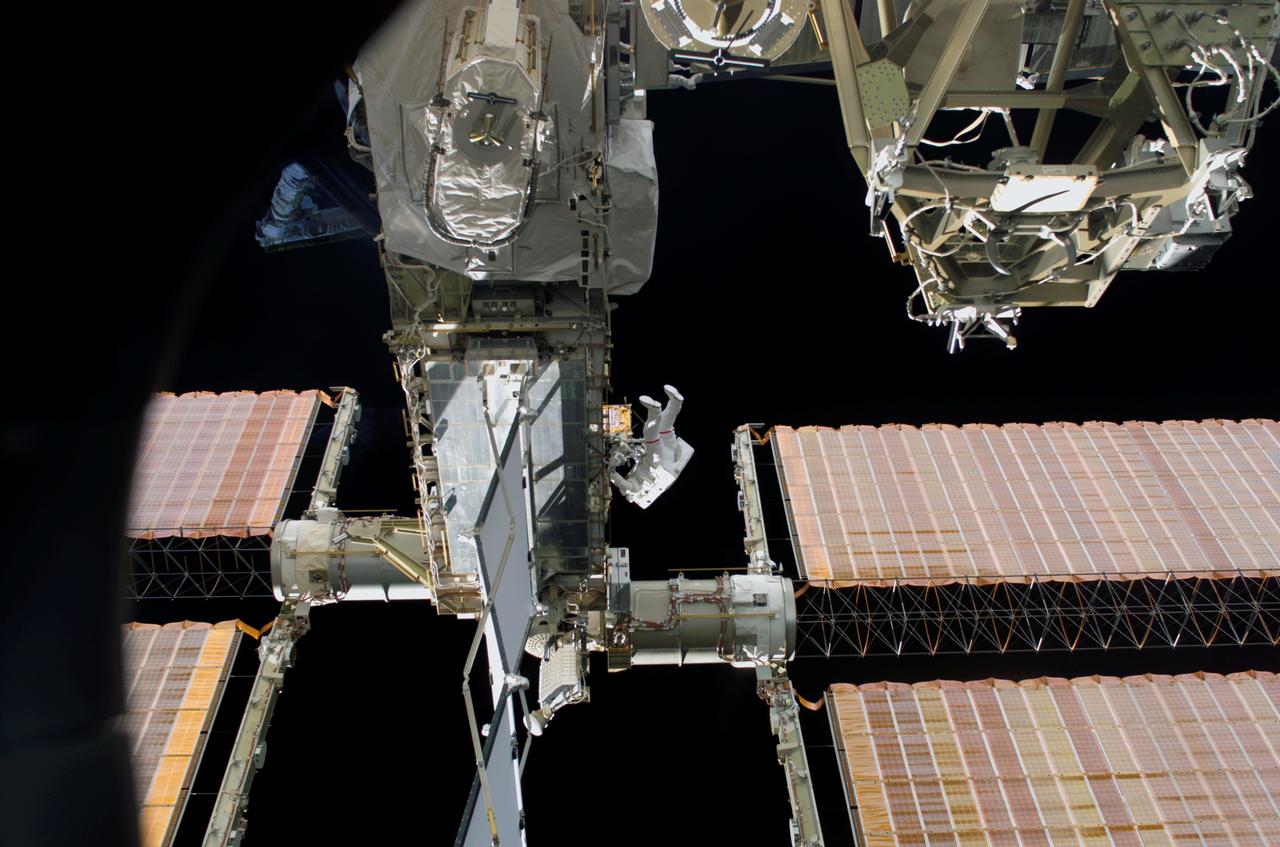
STS113-306-003 (30 November 2002) --- Astronaut John B. Herrington, STS-113 mission specialist, traverses along a truss on the International Space Station (ISS) during the mission’s third spacewalk.
NASA astronauts Andre Douglas, left, and Kate Rubins review traverse plans during a¬¬ nighttime simulated moonwalk in the San Francisco Volcanic Field in Northern Arizona on May 16, 2024. Credit: NASA/Josh Valcarcel

STS110-E-5038 (8 April 2002) --- Astronaut Michael J. Bloomfield, STS-110 mission commander, converses with ground controllers while traversing through the Space Shuttle Atlantis. The image was taken with a digital still camera.
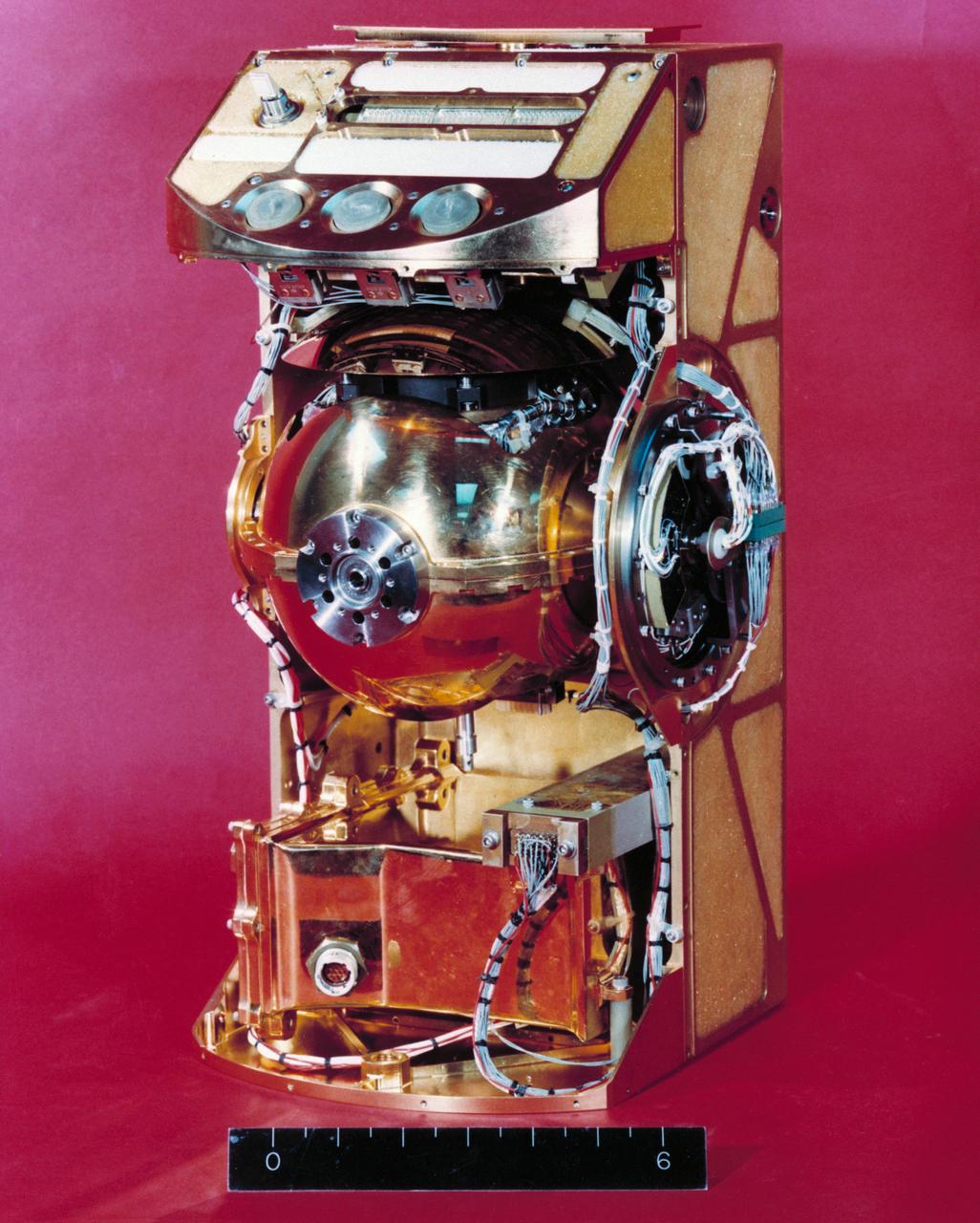
S72-53952 (November 1972) --- The Traverse Gravimeter Experiment (S-199), with cover removed, which will be used by the Apollo 17 crewmen at the Taurus-Littrow landing site. The purposes of this experiment are to make a high accuracy relative survey of the lunar gravitational field in the lunar landing area and to make an Earth-moon gravity tie. Specific experiment objectives related to these purposes are to: (1) measure the value of gravity, relative to the value at a lunar base station, at selected known locations along the lunar traverse; (2) measure the value of gravity at a known point on the lunar surface (base station) relative to the value of gravity at a known point on Earth.
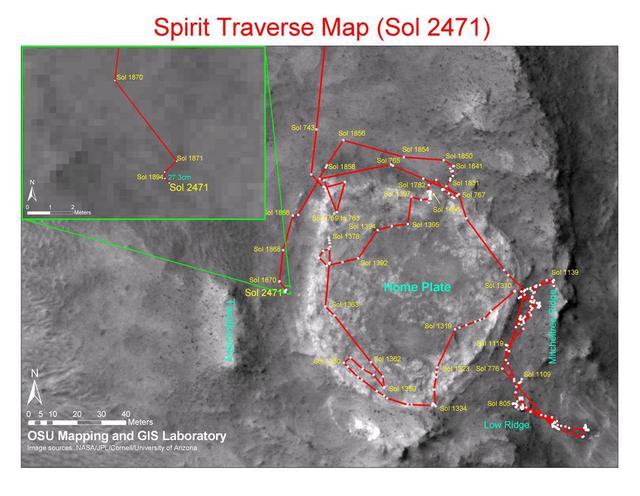
This map shows the path that NASA Mars Exploration Rover Spirit followed from the 743rd Martian day Feb. 4, 2009, or sol, to Sol 2471 Dec. 15, 2010. Spirit has been at a sand-trap location called Troy since April 2009.
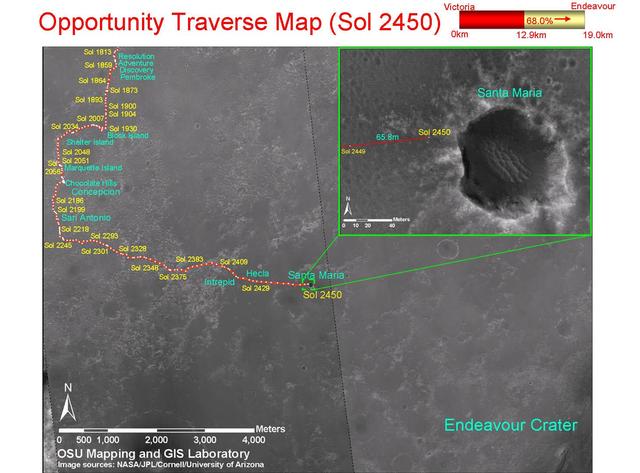
This map shows the path that NASA Mars Exploration Rover Opportunity followed from the 1,813th Martian day, or sol, to Sol 2450 Dec. 15, 2010 when Opportunity approached a crater informally named Santa Maria.
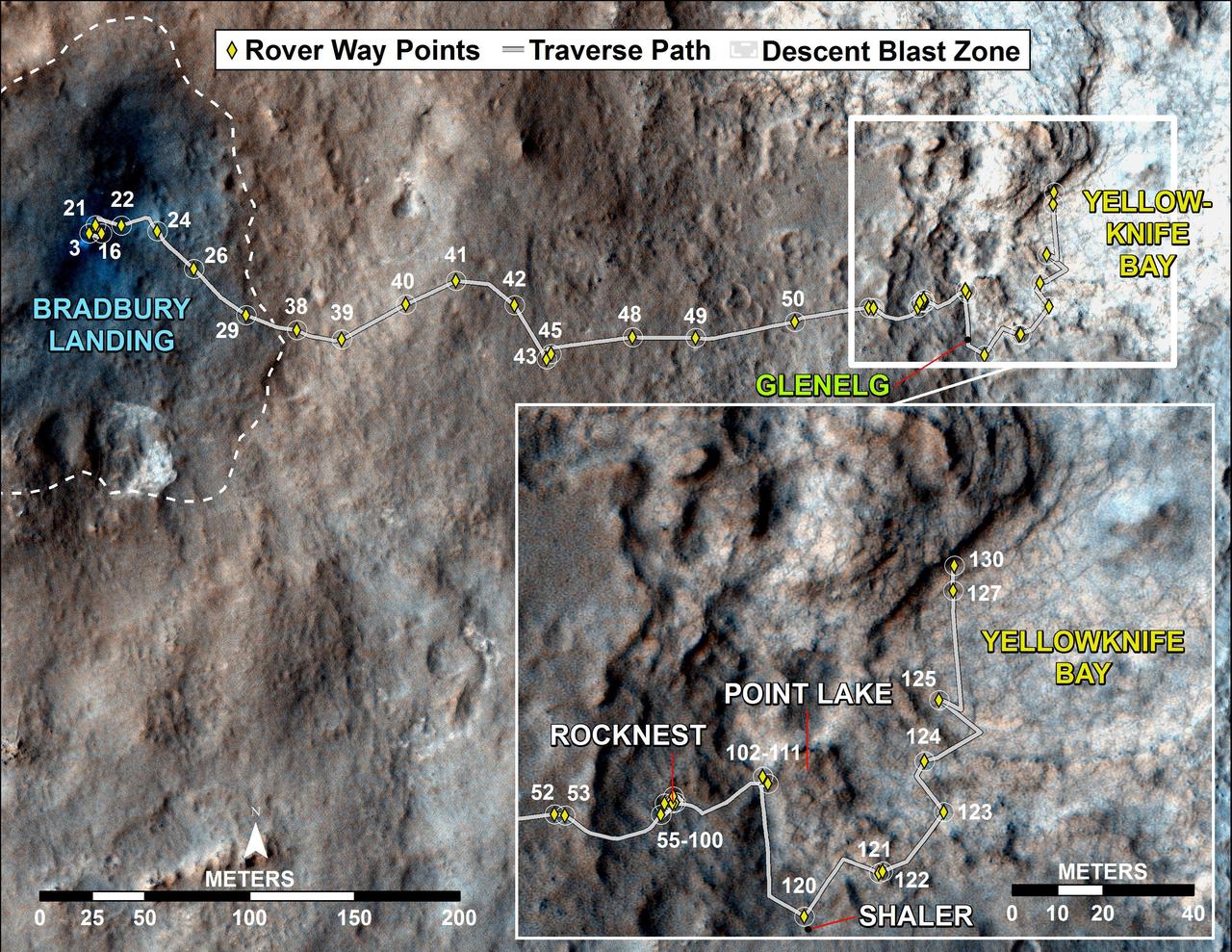
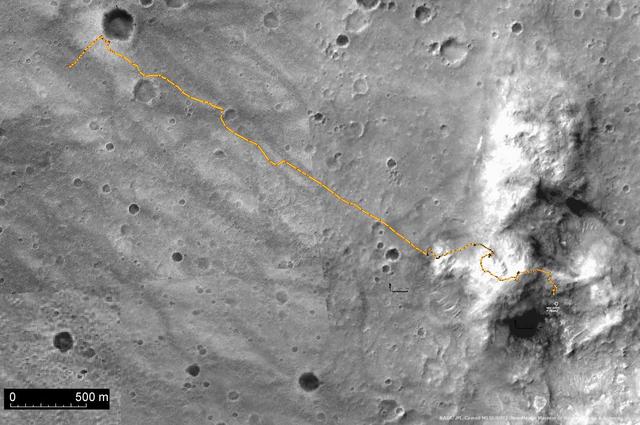
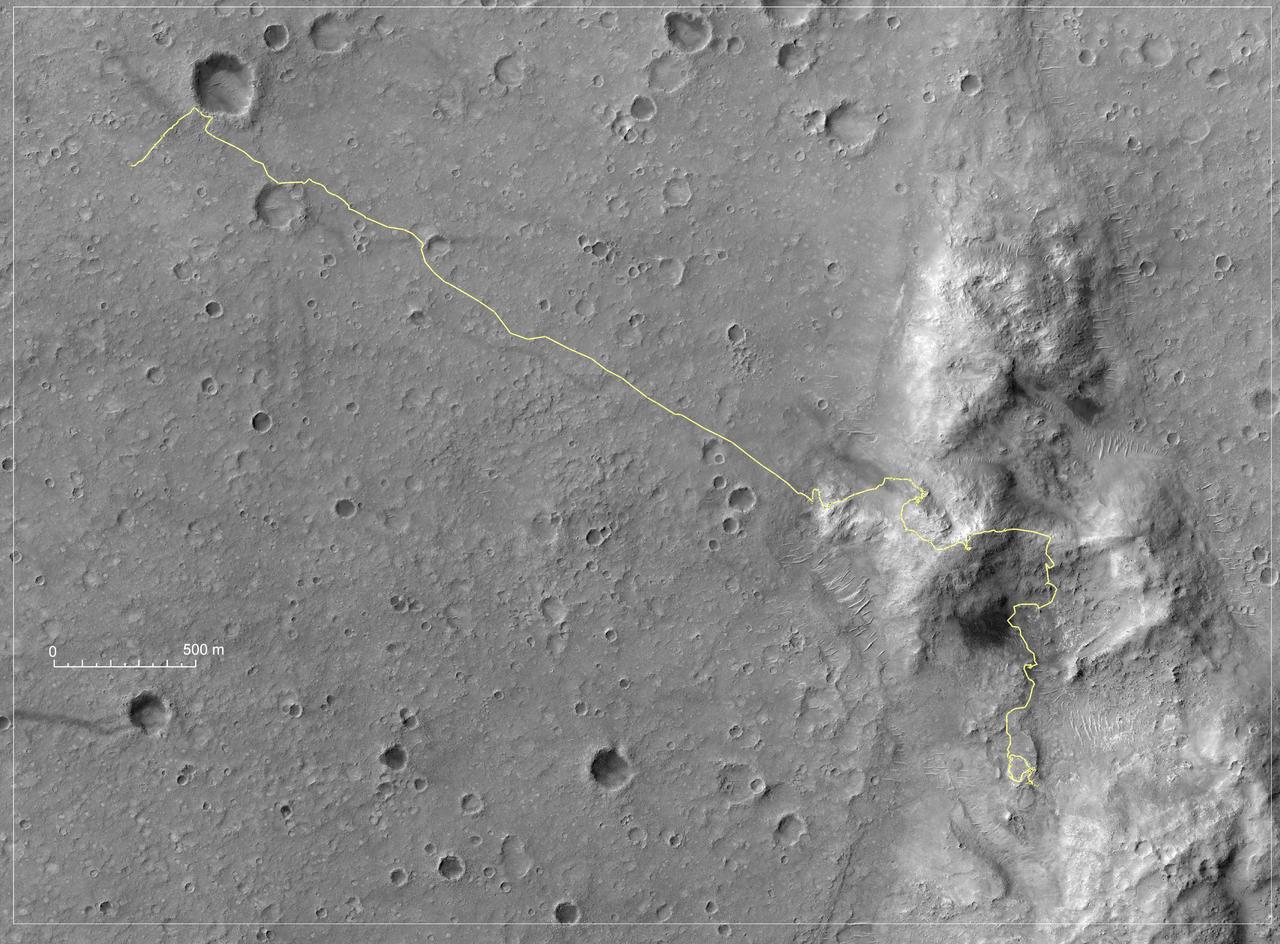
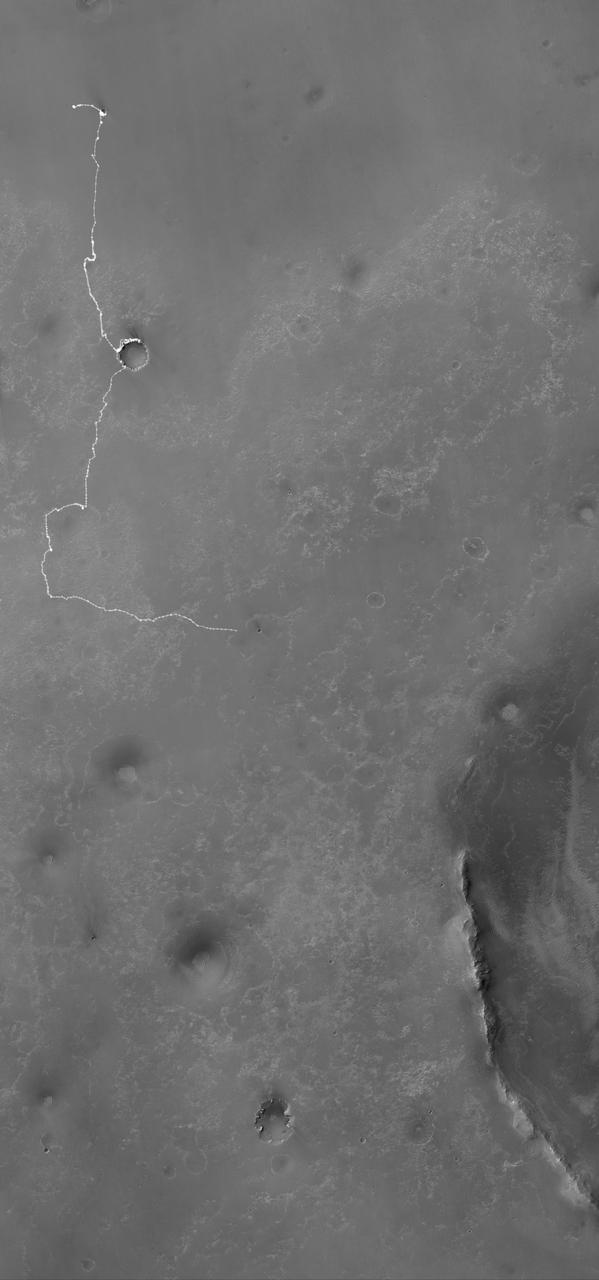
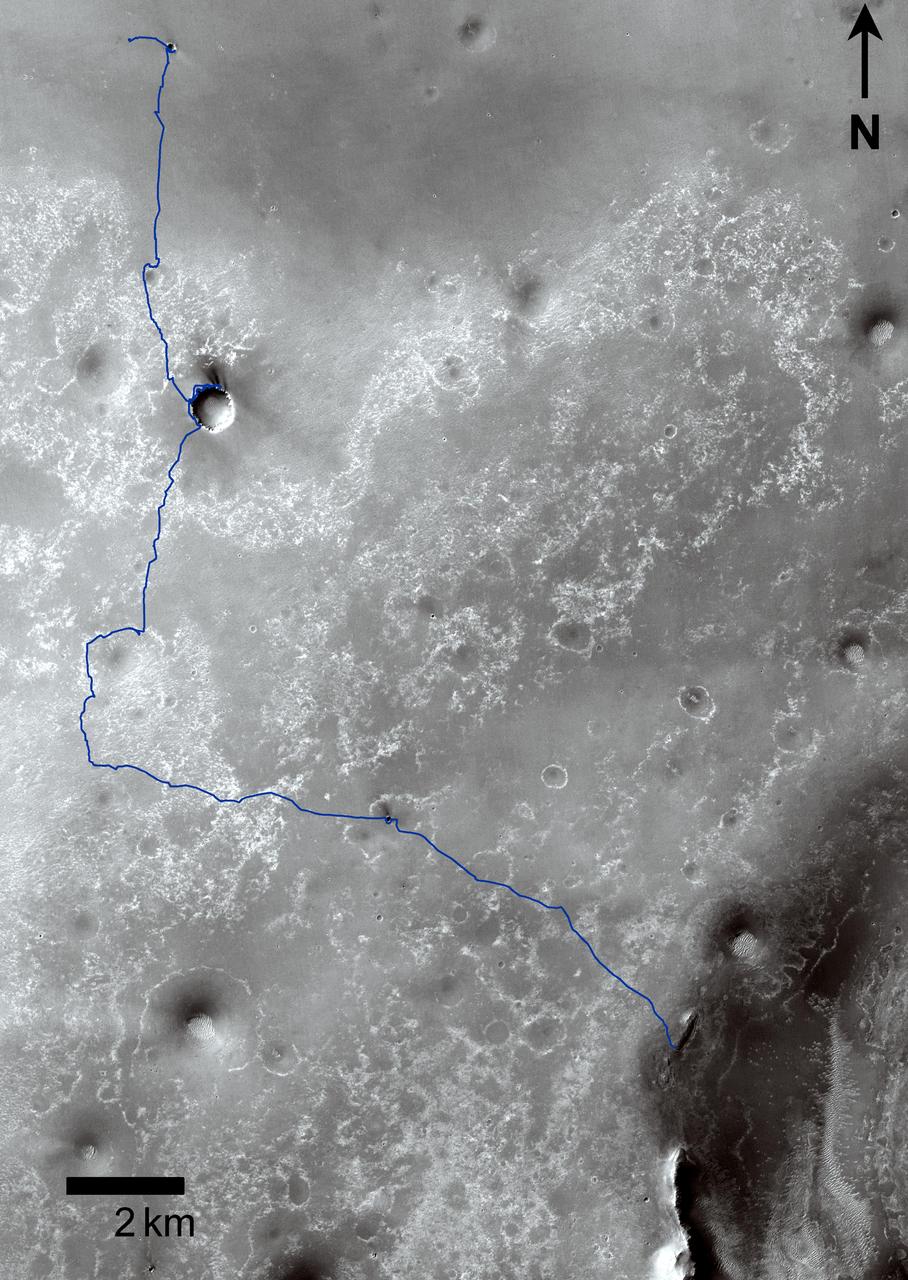
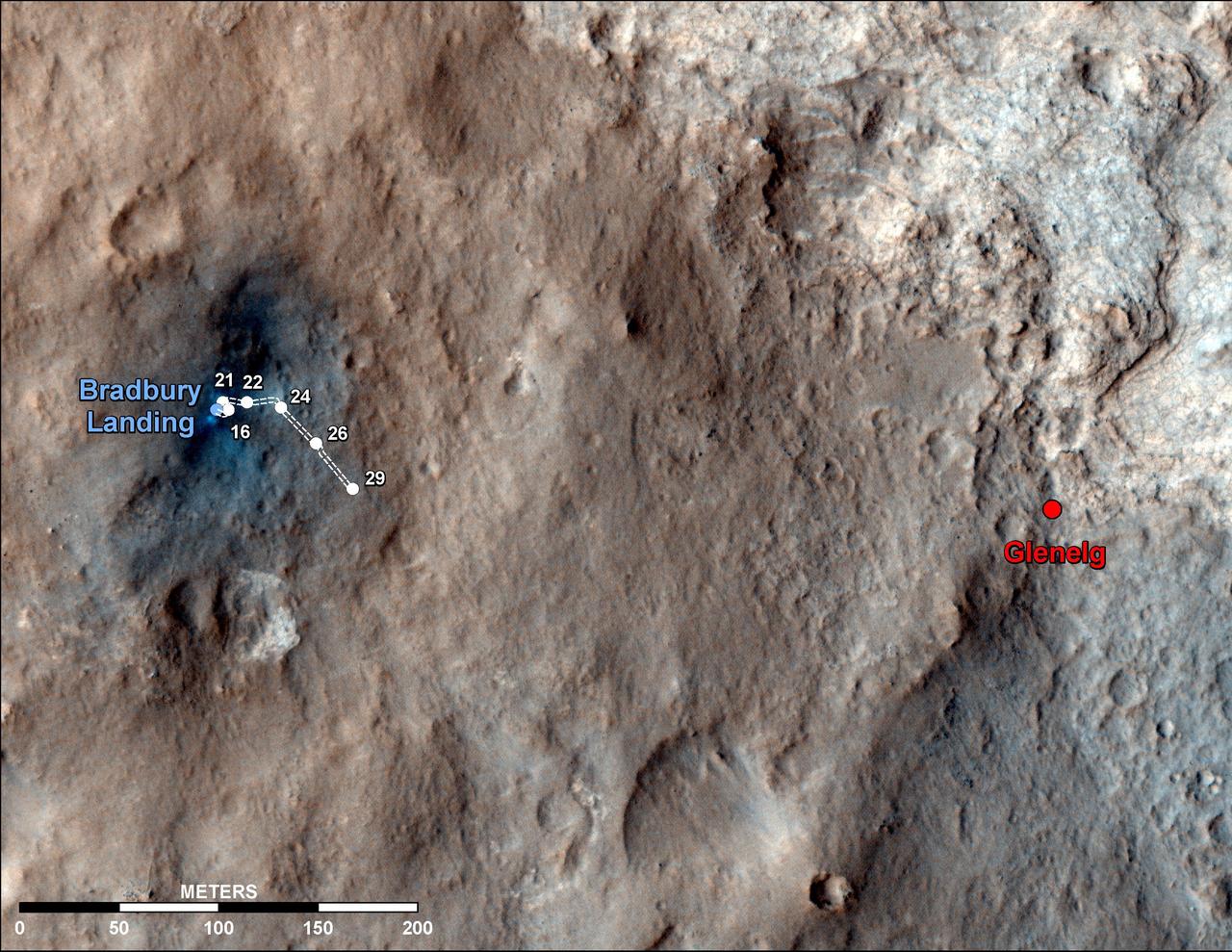
This map traces where NASA Mars rover Curiosity drove between landing at a site subsequently named Bradbury Landing, where the rover entered a shallow depression called Yellowknife Bay on Sol 125 Dec.12.
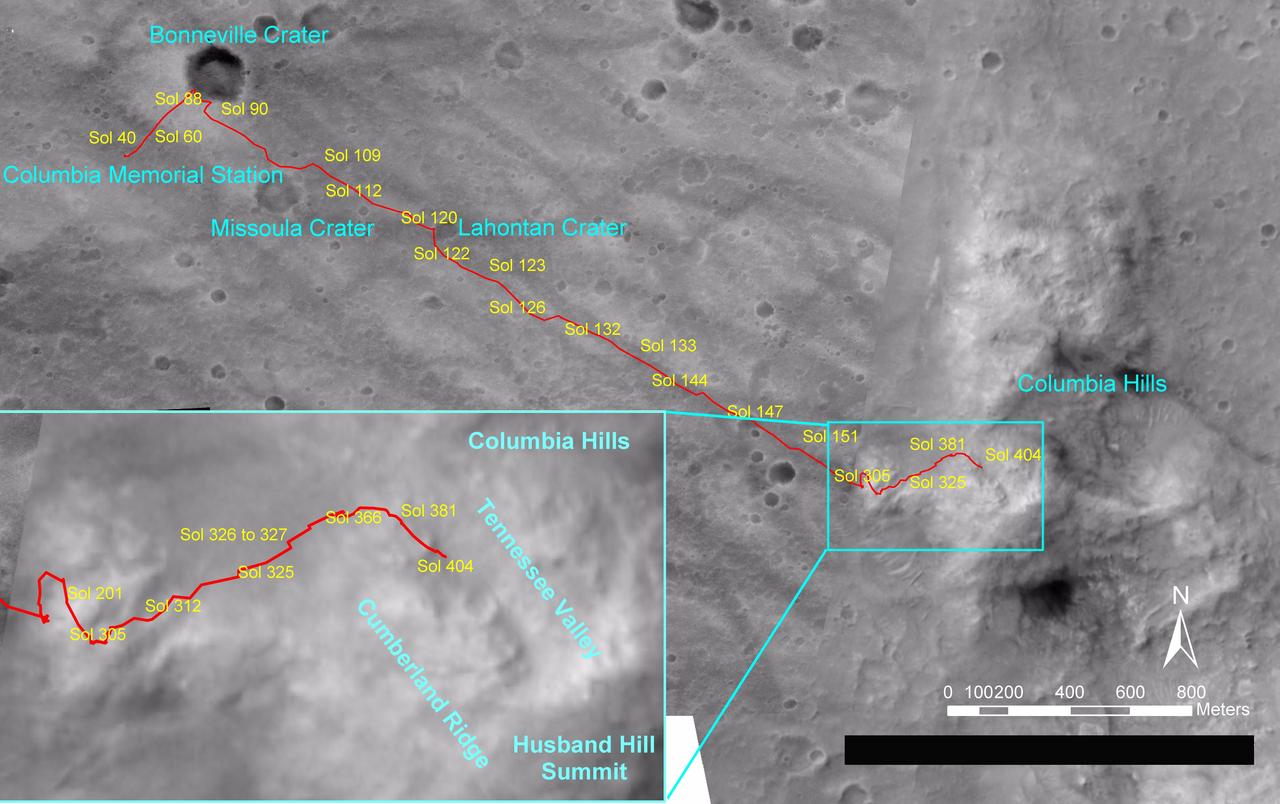
NASA's Mars Exploration Rover Spirit drove a total of 4,143 meters (2.57 miles) between its landing in January 2004 and its 404th martian day, or sol (Feb. 20, 2005). This map on an image taken by the Mars Orbiter Camera on NASA's Mars Global Surveyor shows the course the rover drove during that time. The rover has recently been approaching a ridge overlooking "Tennessee Valley" on the north flank of "Husband Hill." http://photojournal.jpl.nasa.gov/catalog/PIA07393
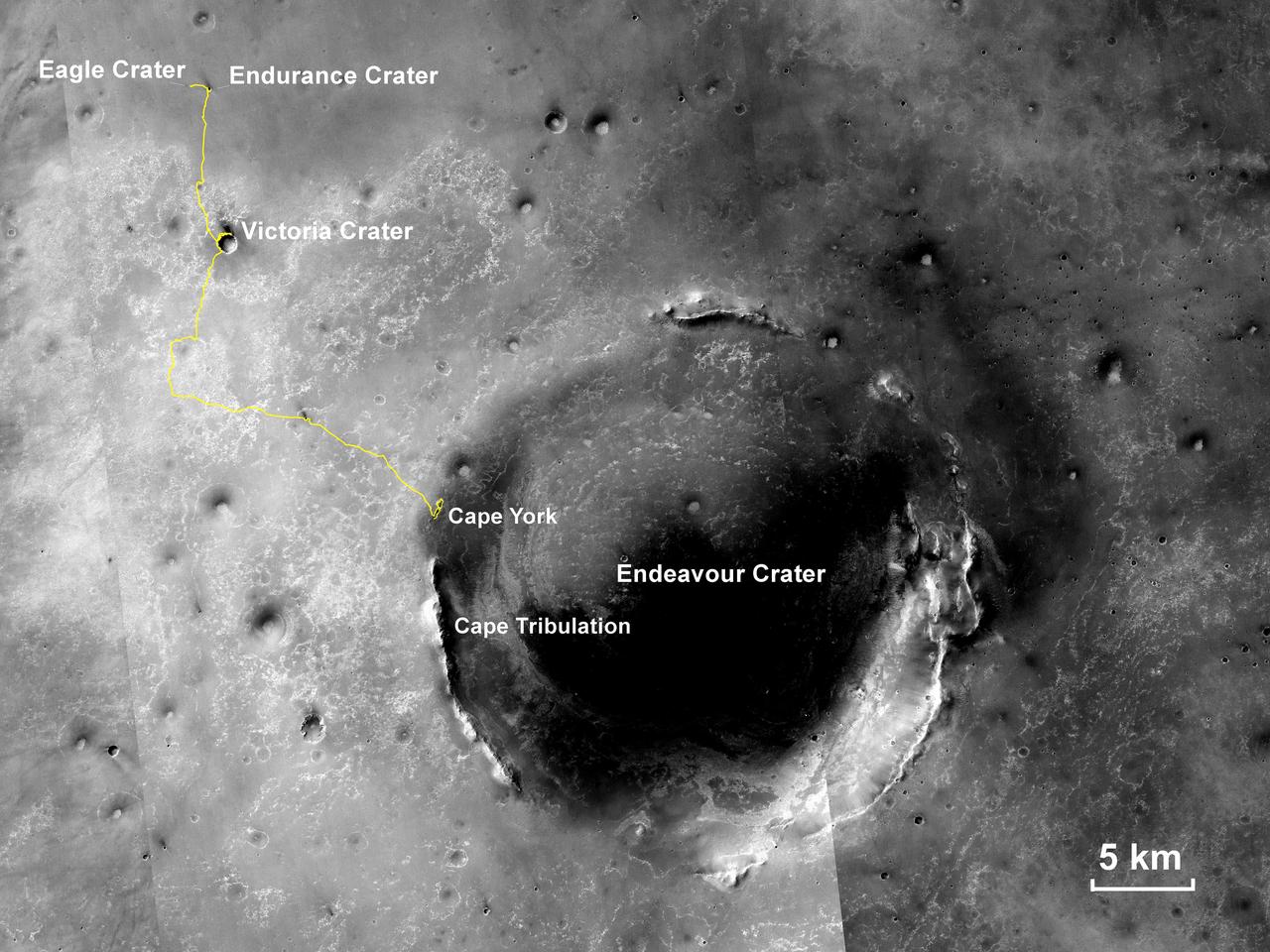
This map shows the route driven by NASA Opportunity rover from the site of its landing, inside Eagle crater, to its location more than 112 months later, in late May 2013, departing the Cape York section of the rim of Endeavour crater.
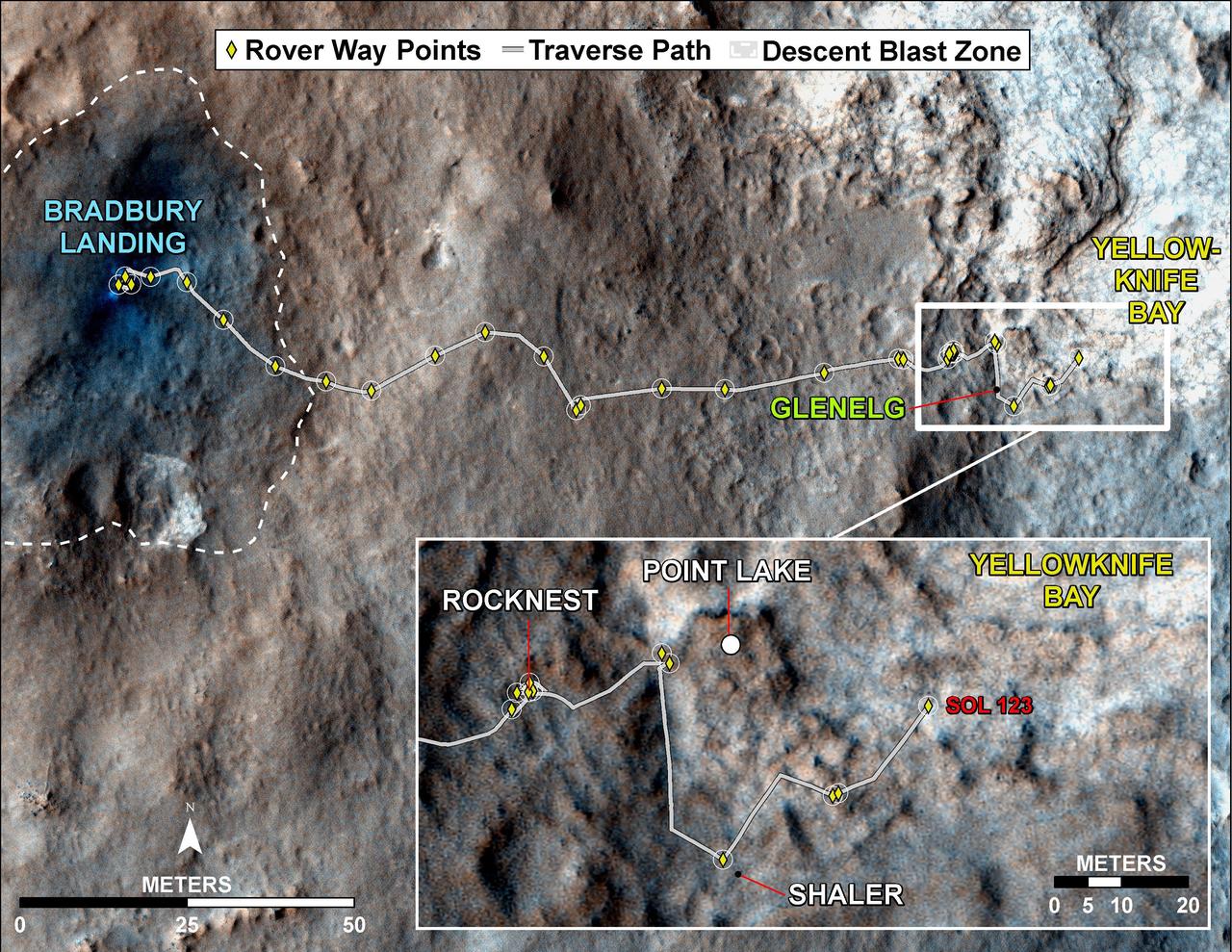
This map traces where NASA Mars rover Curiosity drove between landing at a site subsequently named Bradbury Landing, and the position reached during the mission 123rd Martian day, or sol, Aug. 10, 2012.

This map shows the route driven by NASA's Curiosity Mars rover (blue line) and locations where the rover's Chemistry and Camera (ChemCam) instrument detected the element boron (dots, colored by abundance of boron according to the key at right). The main map shows the traverse from landing day (Sol 0) in August 2012 to the rover's location in September 2016, with boron detections through September 2015. The inset at upper left shows a magnified version of the most recent portion of that traverse, with boron detections during that portion. Overlapping dots represent cases when boron was detected in multiple ChemCam observation points in the same target and non-overlapping dots represent cases where two different targets in the same location have boron. Most of the mission's detections of boron have been made in the most recent seven months (about 200 sols) of the rover's uphill traverse. The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. North is up. The scale bar at lower right represents one kilometer (0.62 mile). http://photojournal.jpl.nasa.gov/catalog/PIA21150

NM21-382-019 (For Release October 1996) --- Darkened view of cosmonaut Yury I. Onufrienko, Mir 21 commander, wearing a red stripe on his Russian Orlan spacesuit, traversing the the Sofora Truss, with the Strehla transfer aid beside it.

S71-39868 (July 1971) --- An artist's concept of the Apollo 15 Hadley-Apennine landing area showing the two moon-exploring crewmen on a traverse in their Lunar Roving Vehicle (LRV). The two figures represent astronauts David R. Scott, commander, and James B. Irwin, lunar module pilot. The artwork is by Teledyne Ryan.
S114-E-6856 (3 August 2005) --- Backdropped by the blackness of space, astronaut Soichi Noguchi, STS-114 mission specialist representing the Japan Aerospace Exploration Agency (JAXA), traverses along the P6 truss near the arrays on the international space station during the mission’s third session of extravehicular activity (EVA).

Leslie Lowes from the NASA Jet Propulsion Laboratory in Pasadena, Calif., views the June 5, 2012, Venus transit through a solar telescope. Lowes participated in an education workshop at the INFINITY at NASA Stennis Space Center visitor center and joined others to view the rare celestial event when Venus traverses the face of the sun.

Guests at the INFINITY at NASA Stennis Space Center visitor center use special solar sunglasses to catch a lifetime view of the Venus transit June 5, 2012. The rare celestial event in which the planet Venus traverses the face of the sun will not be visible from Earth again until 2117.

NM21-382-010 (For Release October 1996) --- Mir 21 commander Yury I. Onufrienko (left), wearing a red stripe on his Russian Orlan spacesuit, and Mir 21 flight engineer Yury V. Usachev (blue stripe on Orlan)traverse an existing truss on the Kvant module with a folded truss in tow.

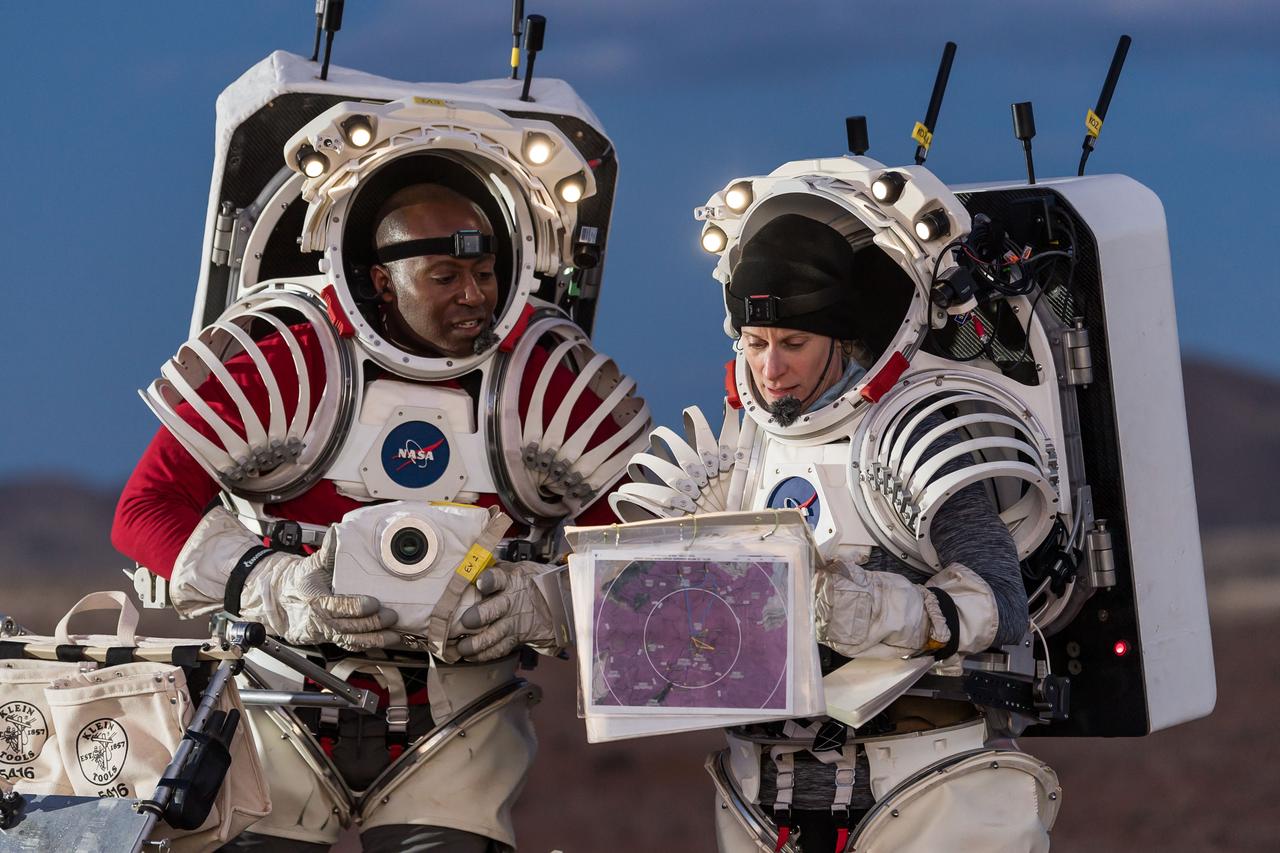
NASA astronauts Kate Rubins, left, and Andre Douglas look at a map that shows their traverse route during a nighttime simulated moonwalk in the San Francisco Volcanic Field in Northern Arizona on May 16, 2024. Credit: NASA/Josh Valcarcel

Leslie Lowes from the NASA Jet Propulsion Laboratory in Pasadena, Calif., views the June 5, 2012, Venus transit through a solar telescope. Lowes participated in an education workshop at the INFINITY at NASA Stennis Space Center visitor center and joined others to view the rare celestial event when Venus traverses the face of the sun.

NASA astronauts Kate Rubins and Andre Douglas review test objectives and traverse plans before their first simulated moonwalk in a week-long field test consisting of four simulated moonwalks and six advanced technology runs in the San Francisco Volcanic Field in Northern Arizona on May 13, 2024 Credit: NASA/Josh Valcarcel

iss071e003390 (4/8/2024) --- A total solar eclipse passes over Mexico, the United States, and Canada. Millions of people witnessed skies darken as the Moon passed between Earth and the Sun. Astronauts aboard station captured the lunar shadow traverse the North American continent.

S118-E-07690 (17 Aug. 2007) --- Astronaut Charlie Hobaugh, STS-118 pilot, traverses through tunnel as the two crews of the Space Shuttle Endeavour and the International Space Station prepare for the mission's final spacewalk on the following day.

Leslie Lowes from the NASA Jet Propulsion Laboratory in Pasadena, Calif., views the June 5, 2012, Venus transit through a solar telescope. Lowes participated in an education workshop at the INFINITY at NASA Stennis Space Center visitor center and joined others to view the rare celestial event when Venus traverses the face of the sun.

S72-44420 (8 June 1972) --- Astronaut Eugene A. Cernan, commander of the Apollo 17 lunar landing mission, prepares to remove a traverse gravimeter training mock-up from a Lunar Roving Vehicle for deployment during lunar surface extravehicular activity simulations at the Kennedy Space Center (KSC), Florida.

Guests at the INFINITY at NASA Stennis Space Center visitor center use special solar sunglasses to catch a lifetime view of the Venus transit June 5, 2012. The rare celestial event in which the planet Venus traverses the face of the sun will not be visible from Earth again until 2117.

STS113-307-006 (30 November 2002) --- Astronaut Michael E. Lopez-Alegria, STS-113 mission specialist, traverses along the Starboard One (S1) truss on the International Space Station (ISS) during the mission’s third and final scheduled spacewalk.

Guests at the INFINITY at NASA Stennis Space Center visitor center use special solar sunglasses to catch a lifetime view of the Venus transit June 5, 2012. The rare celestial event in which the planet Venus traverses the face of the sun will not be visible from Earth again until 2117.

STS110-E-5115 (10 April 2002) --- Astronauts Daniel W. Bursch (right), Expedition Four flight engineer, and Steven L. Smith, STS-110 mission specialist, traverse through the functional cargo block (FGB), or Zarya on the International Space Station (ISS). The image was taken with a digital still camera.
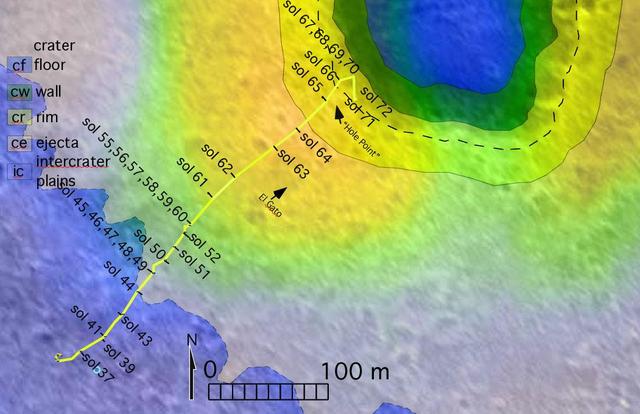
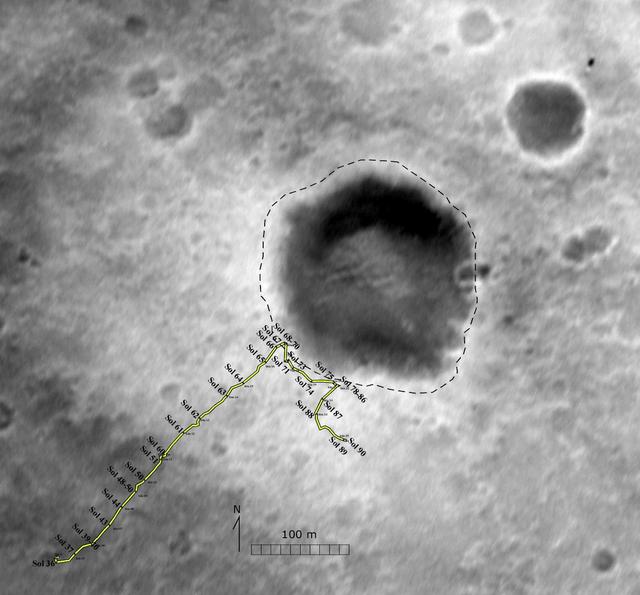
The route of NASA's Mars Exploration Rover Spirit, from its landing site to its location on sol 72 (March 16, 2004) near the rim of the large crater dubbed "Bonneville" is pictured here on this traverse map. The map consists of data from NASA's Mars Global Surveyor orbiter and NASA's Mars Odyssey orbiter. The varying terrains surrounding Bonneville--crater floor, crater wall, crater rim, crater ejecta (material ejected from the crater) and intercrater plains--are highlighted in different colors. http://photojournal.jpl.nasa.gov/catalog/PIA05581

Lunar Node-1, an autonomous navigation payload that will change how human explorers safely traverse the Moon’s surface and live and work in lunar orbit, awaits liftoff as part of Intuitive Machines’ IM-1 mission, its first under NASA’s Commercial Lunar Payload Services initiative. LN-1 was developed, built, and tested at NASA’s Marshall Space Flight Center in Huntsville, Alabama.
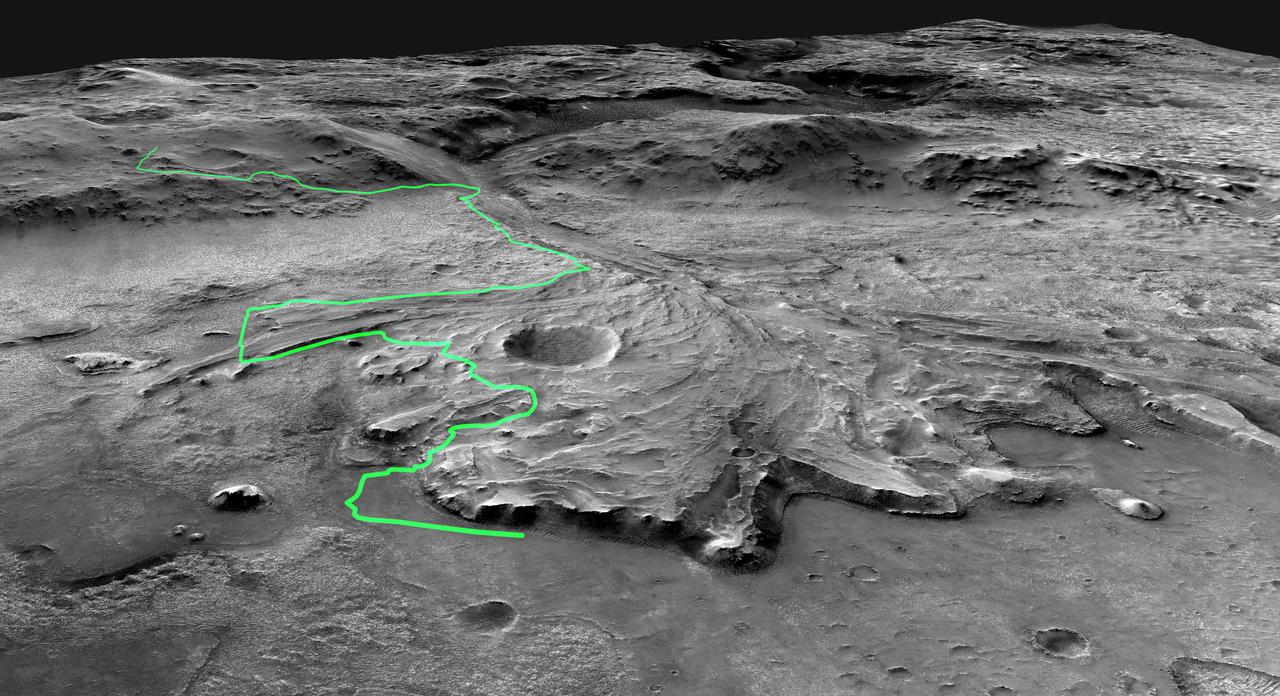
This annotated mosaic depicts a possible route the Mars 2020 Perseverance rover could take across Jezero Crater as it investigates several ancient environments that may have once been habitable. The route begins at the cliffs defining the base of a delta produced by a river as it flowed into a lake that once filled the crater. The path then traverses up and across the delta toward possible ancient shoreline deposits, and then climbs the 2,000-foot-high (610-meter-high) crater rim to explore the surrounding plains. About half of this traverse could be completed in Perseverance's prime mission (one Mars year, or two Earth years). For reference, the prominent crater near the center of the image is about 0.6 miles (1 kilometer) across. This mosaic is composed of multiple precisely aligned images from the Context Camera on the Mars Reconnaissance Orbiter and has a resolution of 20 meet (6 meters) per pixel. https://photojournal.jpl.nasa.gov/catalog/PIA24379
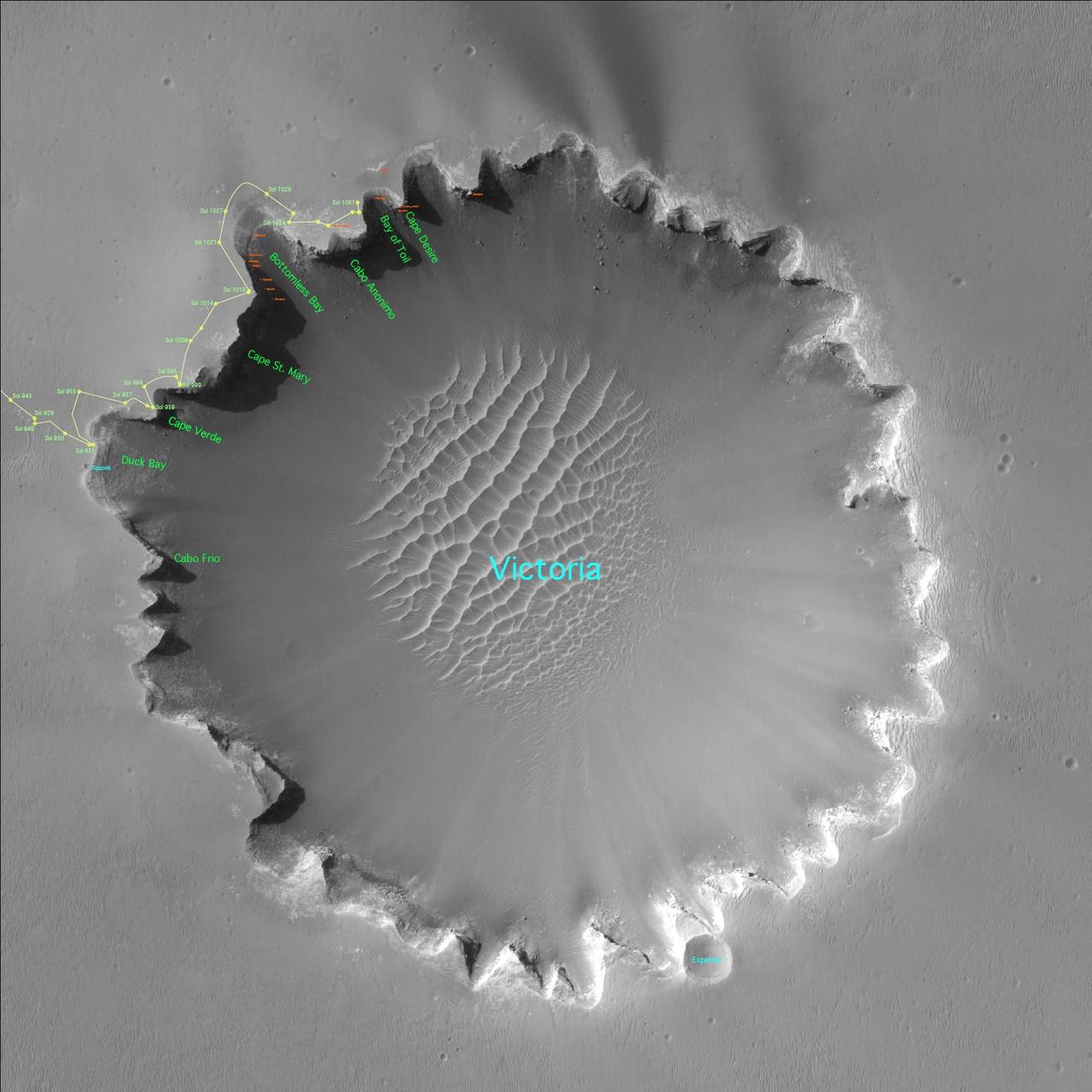
Three years after embarking on a historic exploration of the red planet and six miles away from its landing site, NASA's Mars Exploration Rover Opportunity is traversing "Victoria Crater" ridge by ridge, peering at layered cliffs in the interior. To identify various alcoves and cliffs along the way, science team members are using names of places visited by the 16th-century Earth explorer Ferdinand Magellan and his crew aboard the ship Victoria, who proved the Earth is round. (All names are unofficial unless approved by the International Astronomical Union.) This orbital view of "Victoria Crater" was taken by NASA's Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA09116

This panorama of the region to the northeast of the lander was constructed to support the Sojourner Rover Team's plans to conduct an "autonomous traverse" to explore the terrain away from the lander after science objectives in the lander vicinity had been met. The large, relatively bright surface in the foreground, about 10 meters (33 feet) from the spacecraft, in this scene is "Baker's Bench." The large, elongated rock left of center in the middle distance is "Zaphod." This view was produced by combining 8 individual "Superpan" scenes from the left and right eyes of the IMP camera. Each frame consists of 8 individual frames (left eye) and 7 frames (right eye) taken with different color filters that were enlarged by 500% and then co-added using Adobe Photoshop to produce, in effect, a super-resolution panchromatic frame that is sharper than an individual frame would be. http://photojournal.jpl.nasa.gov/catalog/PIA01000
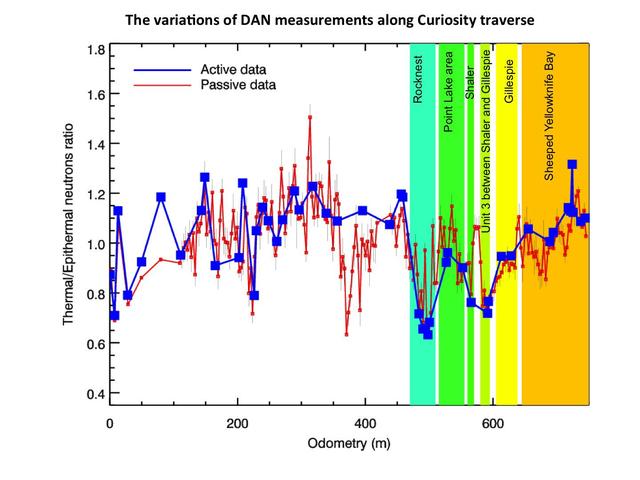
This chart graphs measurements made by the Dynamic Albedo of Neutrons DAN instrument on NASA Mars rover Curiosity against the distance the rover has driven, in meters.
The white line on this map shows where NASA Mars Rover Opportunity has driven from the place where it landed in January 2004 -- inside Eagle Crater, at the upper left end of the track -- to where it reached on the 2,442nd Martian day, or sol.
This map shows route driven by NASA Mars Exploration Rover Opportunity from the site of its landing, inside Eagle crater at the upper left, to its location more than 91 months later, on the Cape York section of the rim of Endeavour crater.
This map shows the route driven by NASA Curiosity Mars rover from the location where it landed in August 2012 to its location in December 2015.
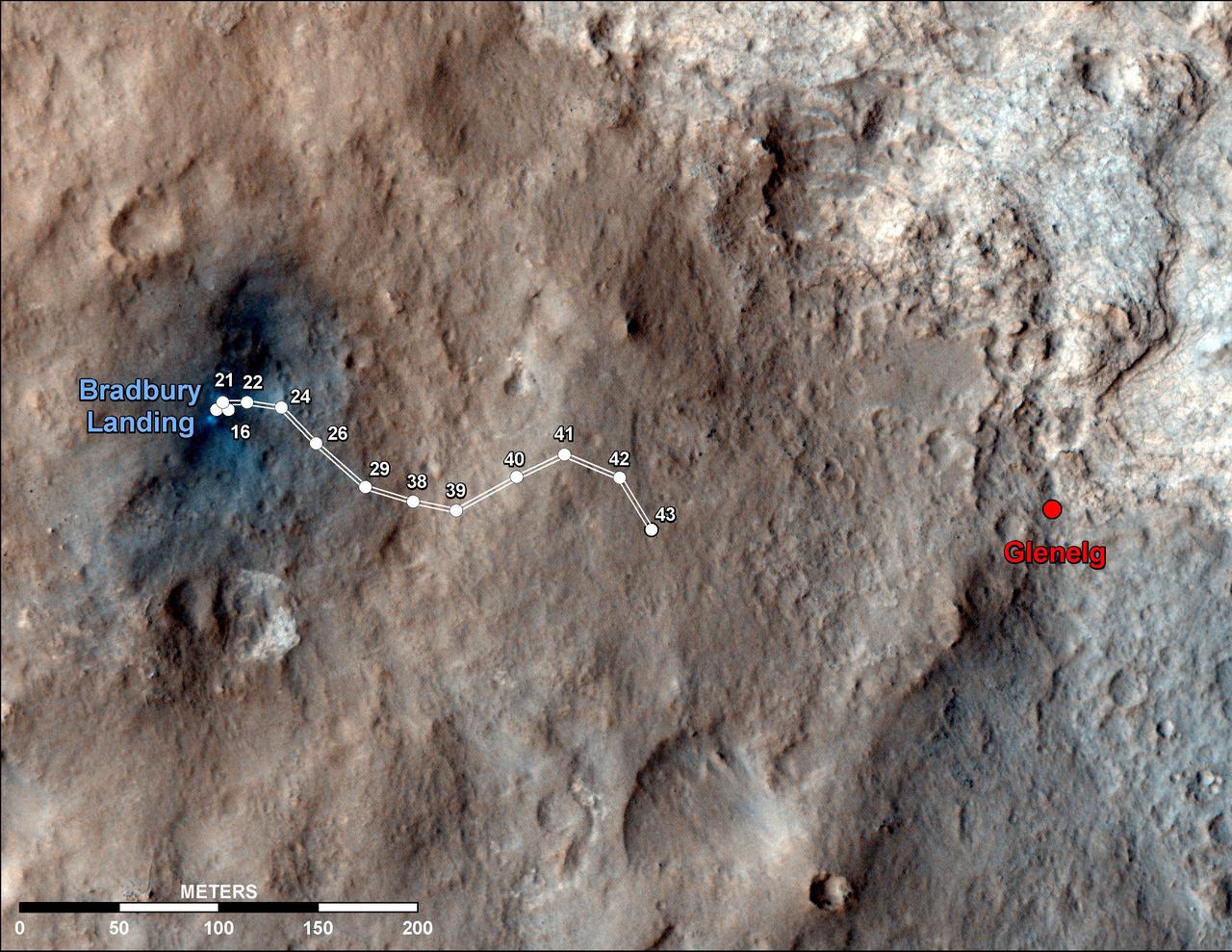
This map shows the route driven by NASA Mars rover Curiosity through the 43rd Martian day, or sol, of the rover mission on Mars Sept. 19, 2012. The route starts where the rover touched down, a site subsequently named Bradbury Landing.
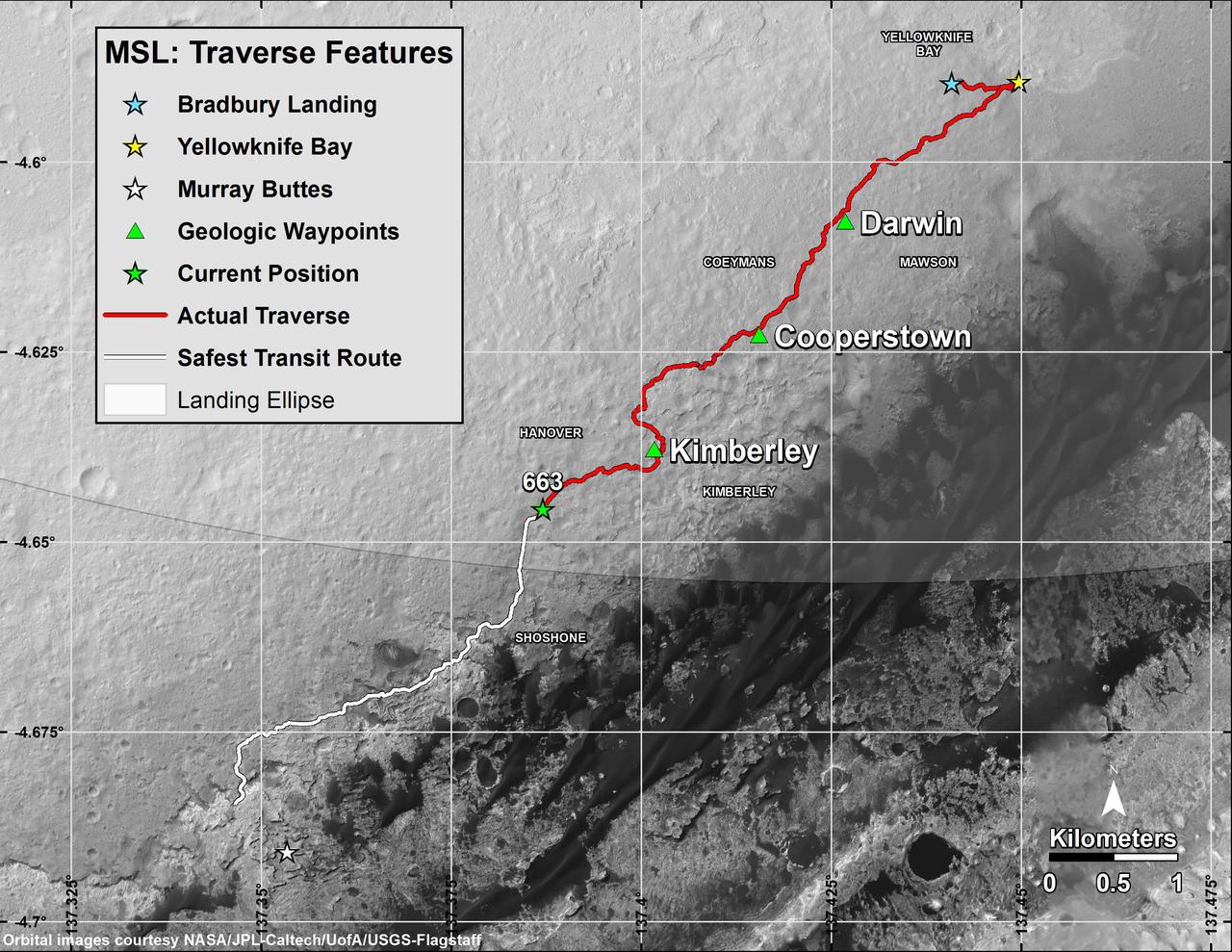
This map shows in red the route driven by NASA Curiosity Mars rover from its landing site at Bradbury Landing. The white line shows the planned route to reach destinations on Mount Sharp. Sol 669 will complete one Martian year.
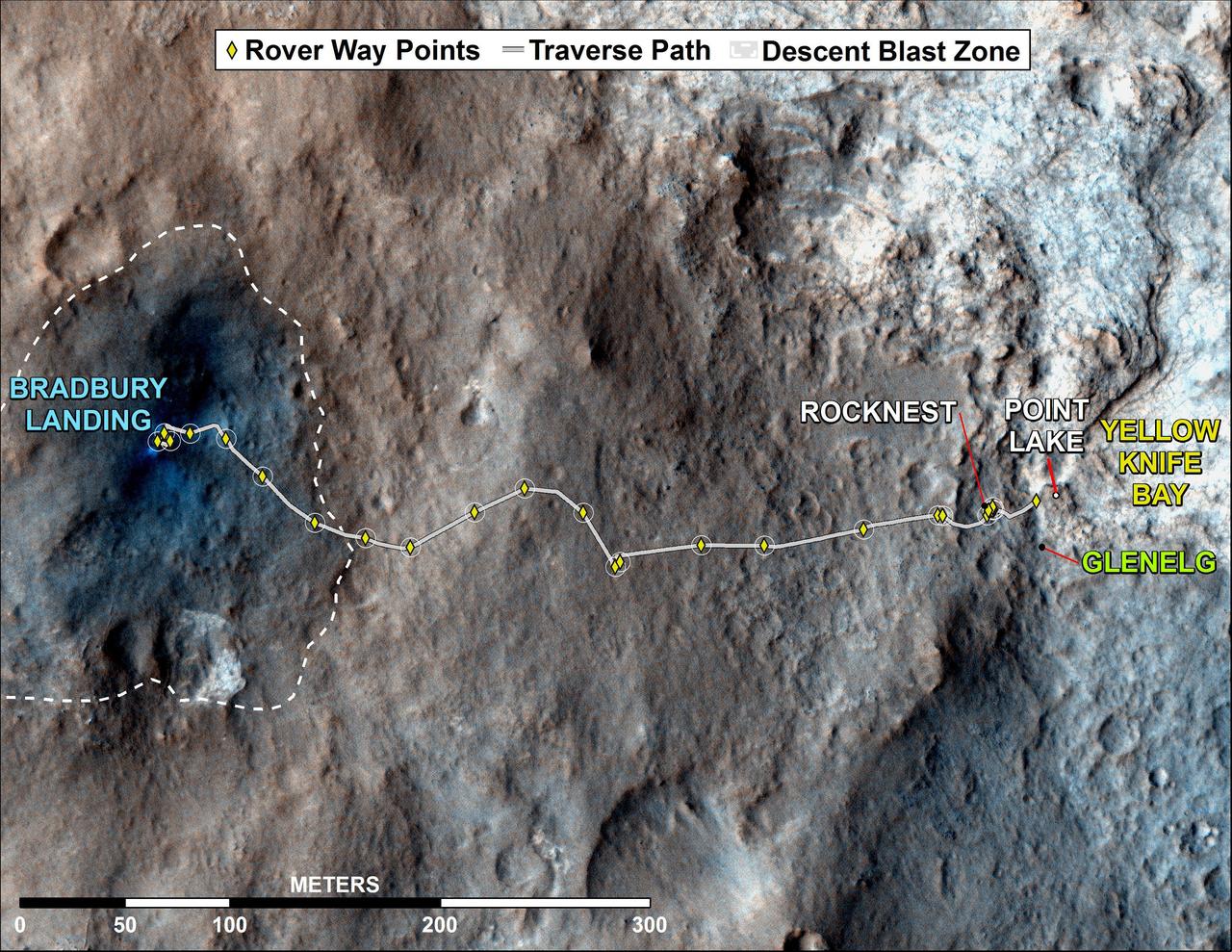
This map shows where NASA Mars rover Curiosity has driven since landing at a site subsequently named Bradbury Landing, and traveling to an overlook position near beside Point Lake, in drives totaling 1,703 feet 519 meters.
The total distance driven by NASA Mars rover Curiosity passed the one-mile mark a few days before the first anniversary of the rover landing on Mars. The mapped area is within Gale Crater, and north of Mount Sharp, in the middle of the crater.
This map shows the route driven by NASA Mars rover Curiosity through the 29th Martian day, or sol, of the rover mission on Mars Sept. 4, 2012.
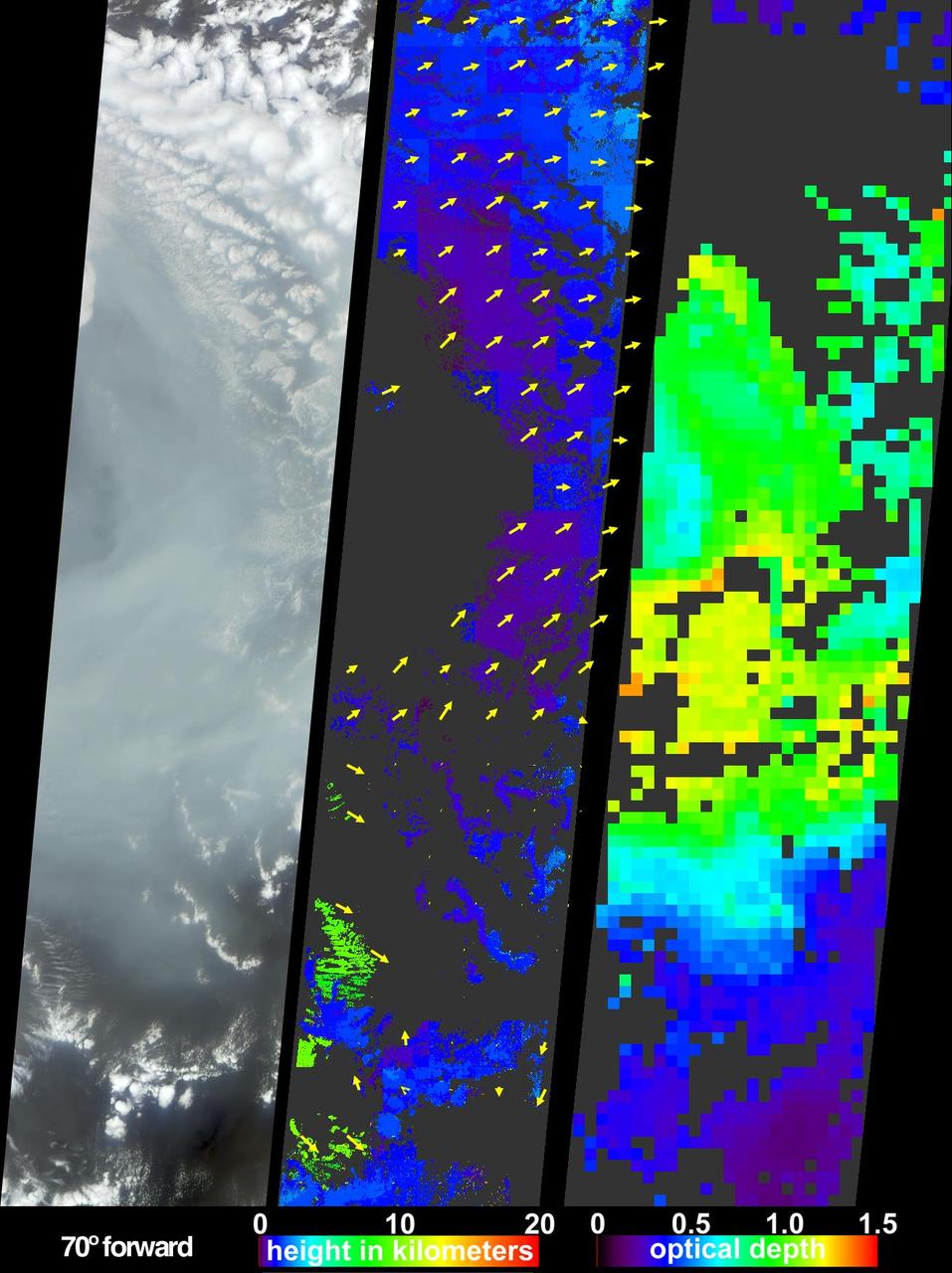
During the first two weeks of April, 2003, numerous fires occurred in eastern Russia and northeast China, and produced a large amount of smoke that rose to form a thick layer of tiny atmospheric particles, or aerosols seen here by NASA Terra spacecraft.
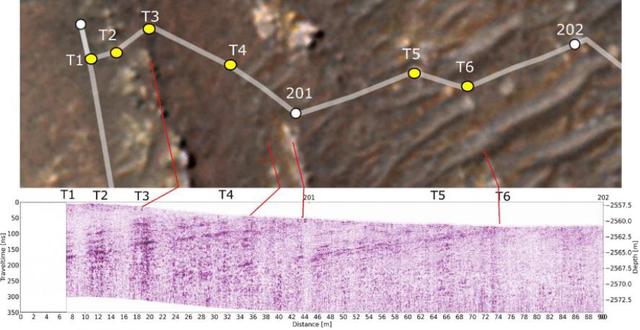
This annotated-composite graphic shows the entry of NASA's Perseverance rover into the "South Séítah" geologic unit from both an orbital and subsurface perspective. The annotated view from NASA's Mars Reconnaissance Orbitor (MRO) depicts the route Perseverance took into Séítah. The image was provided by MRO's High Resolution Imaging Experiment (HiRISE). The graphic below the orbital image is the first "radargram" to be released by the Radar Imager for Mars' Subsurface Experiment (RIMFAX) instrument aboard Perseverance. It shows the subsurface as the rover drove across the "Artuby" ridgeline. The red lines link bright subsurface "reflectors" to erosion-resistant layers outcropping at the surface. The University of Arizona, in Tucson, operates HiRISE, which was built by Ball Aerospace & Technologies Corp., in Boulder, Colorado. NASA's Jet Propulsion Laboratory, a division of Caltech in Pasadena, California, manages the Mars Reconnaissance Orbiter Project for NASA's Science Mission Directorate, Washington. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. https://photojournal.jpl.nasa.gov/catalog/PIA25025
This annotated image from NASA's Mars Reconnaissance Orbiter (MRO) shows the journey NASA's Perseverance rover has taken and will take in the future as it heads toward Jezero Crater's delta on Mars. The white line depicts the route the rover has taken since it touched down at the "Octavia E. Butler Landing" site on Feb. 18, 2021, to its current location in the "South Séítah" geologic unit (light-blue dot). The rover will return to the landing site along the same route and then continue to the delta along the line in blue. This map is composed of images from the MRO's High Resolution Imaging Experiment (HiRISE). A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA25027
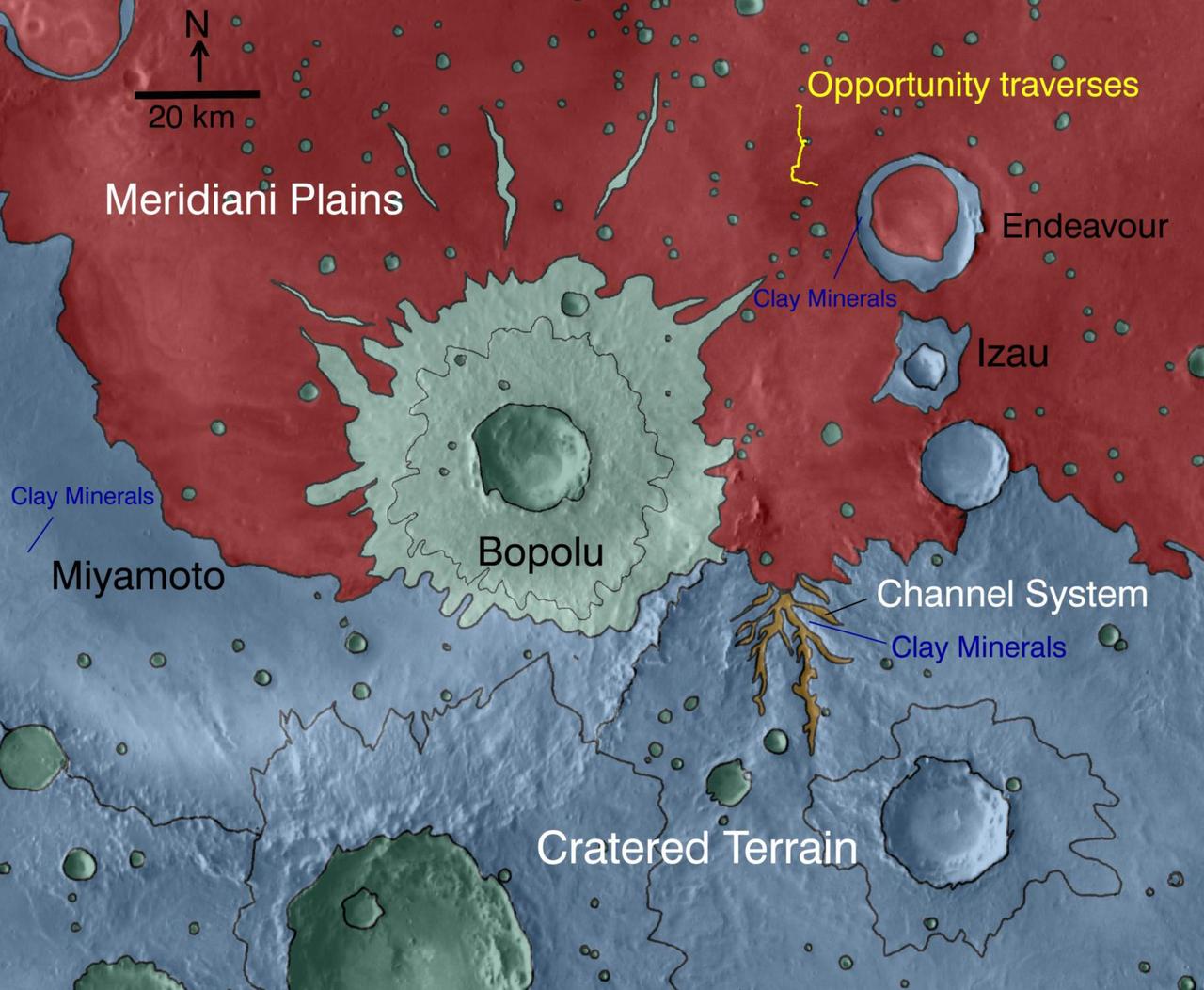
This map indicates geological units in the region of Mars around a smaller area where NASA Mars Exploration Rover Opportunity has driven from early 2004 through late 2010.
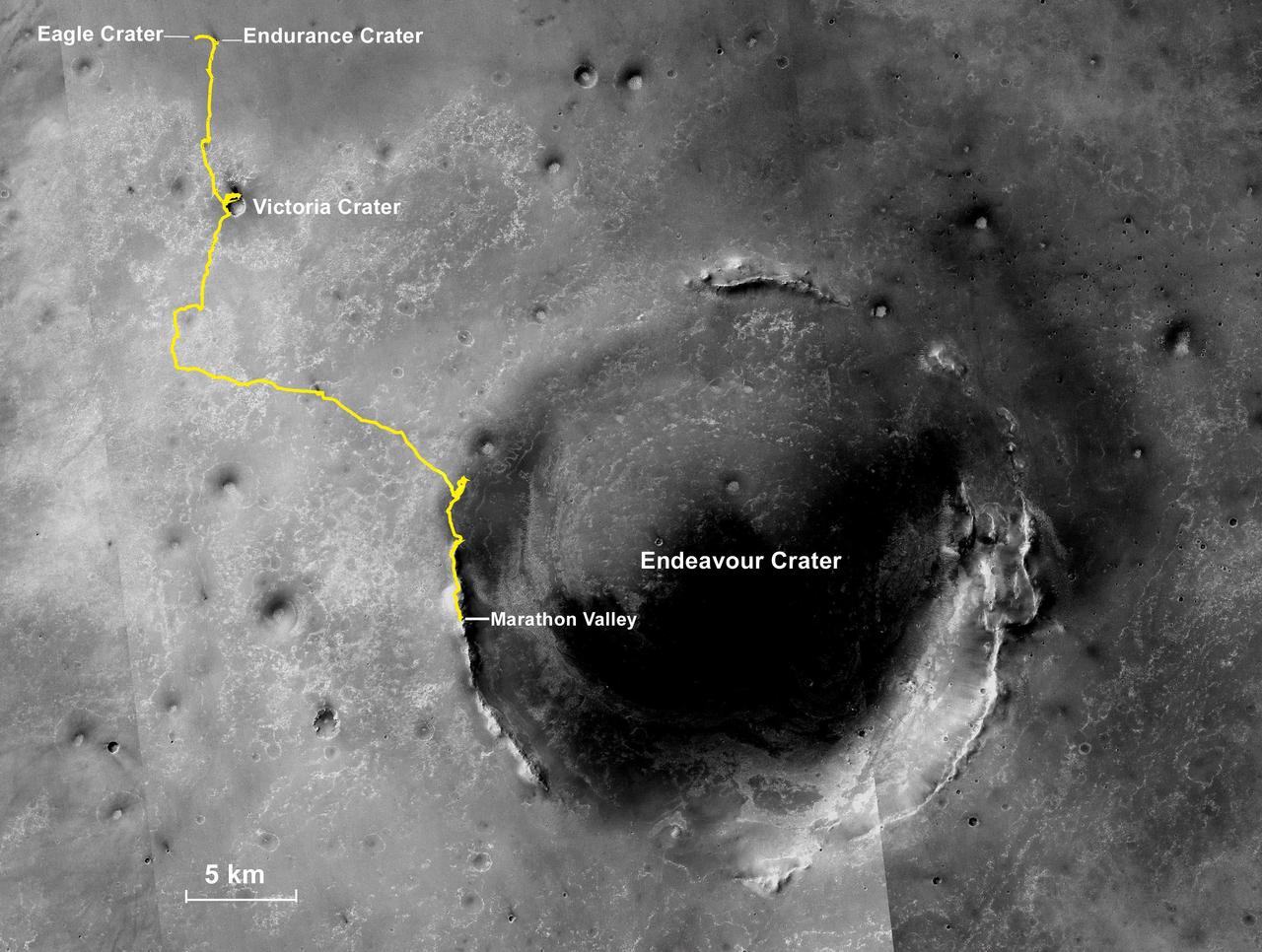
NASA's Mars Exploration Rover Opportunity, working on Mars since January 2004, passed marathon distance in total driving on March 24, 2015, during the mission's 3,968th Martian day, or sol. A drive of 153 feet (46.5 meters) on Sol 3968 brought Opportunity's total odometry to 26.221 miles (42.198 kilometers). Olympic marathon distance is 26.219 miles (42.195 kilometers). The gold line on this image shows Opportunity's route from the landing site inside Eagle Crater, in upper left, to its location after the Sol 3968 drive. The mission has been investigating on the western rim of Endeavour Crater since August 2011. This crater spans about 14 miles (22 kilometers) in diameter. The mapped area is all within the Meridiani Planum region of equatorial Mars, which was chosen as Opportunity's landing area because of earlier detection of the mineral hematite from orbit. North is up. The base image for the map is a mosaic of images taken by the Context Camera on NASA's Mars Reconnaissance Orbiter. http://photojournal.jpl.nasa.gov/catalog/PIA19154