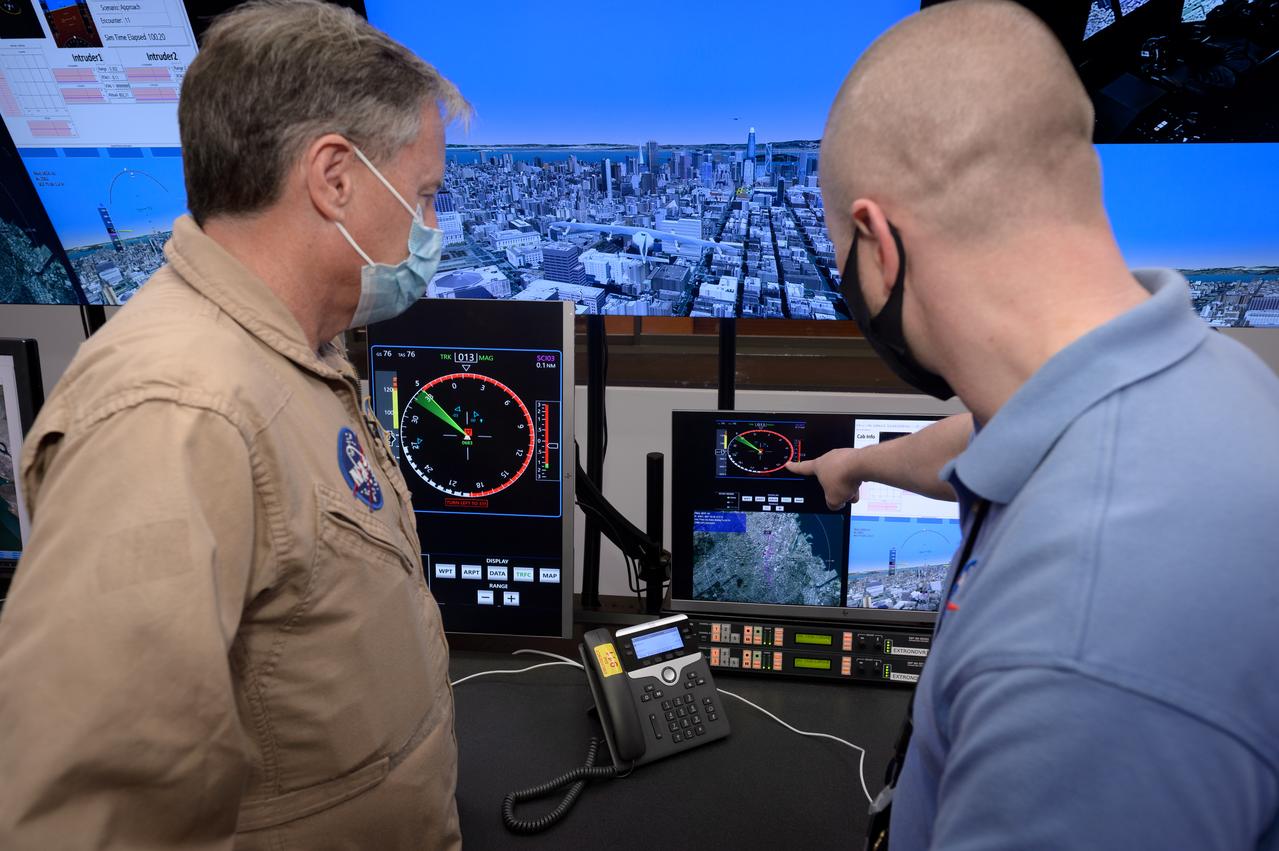
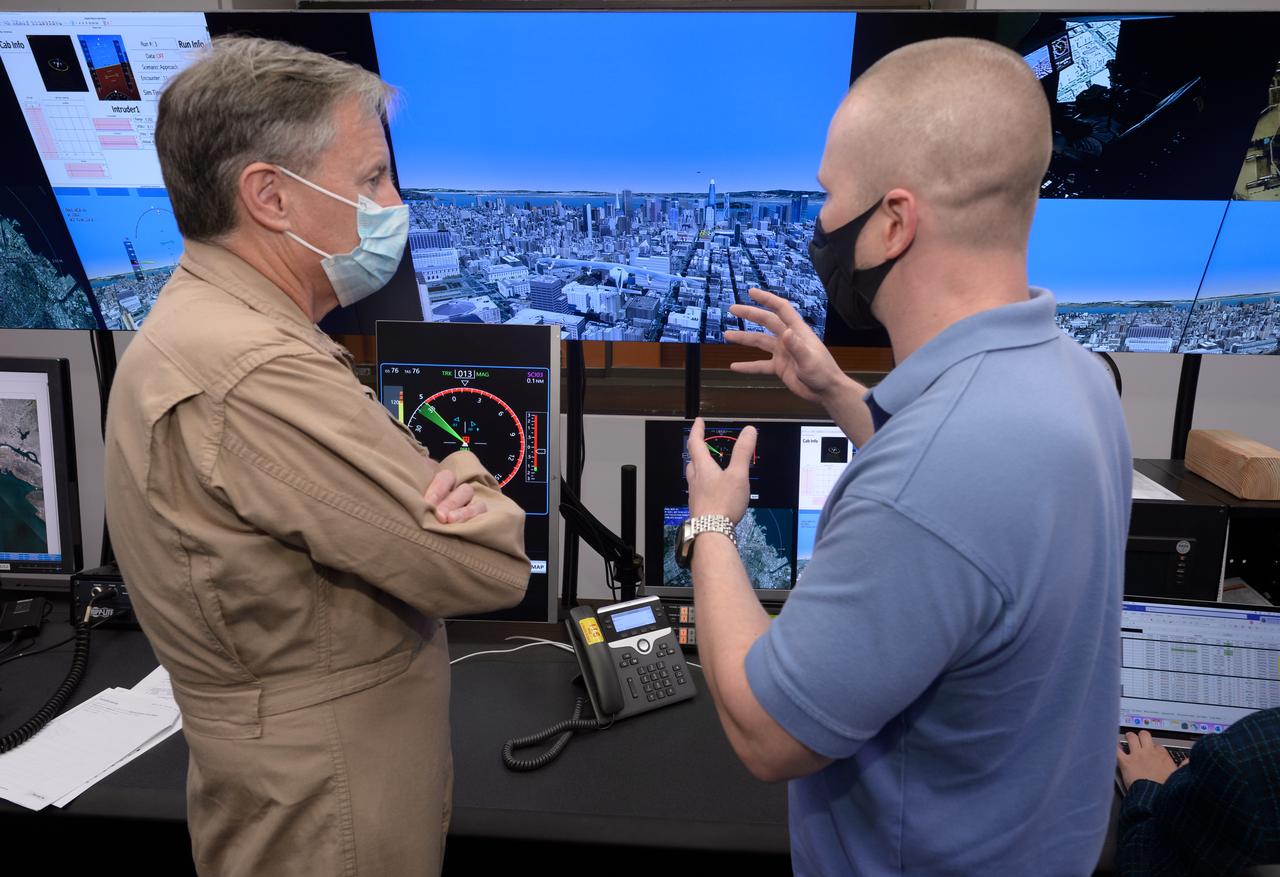
Air taxi urban air space simulation control screens from the pilot perspective Focus on active photos –Class B Simulation Evaluation in the ATOL Lab at Langley (Also at FAA Tech Center) where team is working with one another in the lab, reviewing data on the monitors. Working the software, adjusting the software systems. Going over the shoulder to show the displays and screens as the software is running. A pilot’s point of view from the controls of the air taxi simulator. An out-the-window simulation appears on the top screen, the primary flight display on the lower left, the virtual moving map in the middle, and the detect and avoid display on the lower right at NASA’s Langley Research Center in Hampton, Virginia on Sept. 25, 2024.