
S96-00284 (January 1996) --- Astronaut Umberto Guidoni, mission specialist representing the Italian Space Agency (ASI).

The crew of Space Shuttle mission STS-100 gathered in front of the shuttle Endeavour following landing at Edwards Air Force Base, California, 9:11 am, May 1, 2001. From left to right: John L. Phillips, mission specialist (U.S.); Umberto Guidoni, mission specialist (European Space Agency); Chris A. Hadfield, mission specialist (Canadian Space Agency); Jeffrey S. Ashby, pilot (U.S.); Kent V. Rominger, commander (U.S.); Yuri V. Lonchakov, mission specialist (Russia); Scott E. Prazynski, mission specialist (U.S.).

A happy "thumbs up" from the crew of the Space Shuttle Endeavour and NASA Dryden Flight Research Center officials heralded the successful completion of mission STS-100. Standing by the shuttle's rocket nozzles from left to right: Scott E. Prazynski, mission specialist (U.S.); Yuri V. Lonchakov, mission specialist (Russia); Kent V. Rominger, commander (U.S.); Wally Sawyer, NASA Dryden Flight Research Center deputy director; Kevin Petersen, NASA Dryden Flight Research Center director; Umberto Guidoni, mission specialist (European Space Agency); John L. Phillips, mission specialist (U.S.); Jeffrey S. Ashby, pilot (U.S.); and Chris A. Hadfield, mission specialist (Canadian Space Agency). The mission landed at Edwards Air Force Base, California, on May 1, 2001.

STS100-342-031 (19 April-1 May 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist representing the European Space Agency (ESA), is photographed while on the middeck of the Earth-orbiting Space Shuttle Endeavour.

S100-E-5356 (25 April 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist representing the European Space Agency (ESA), works out on a bicycle ergometer on the middeck of the Space Shuttle Endeavour.

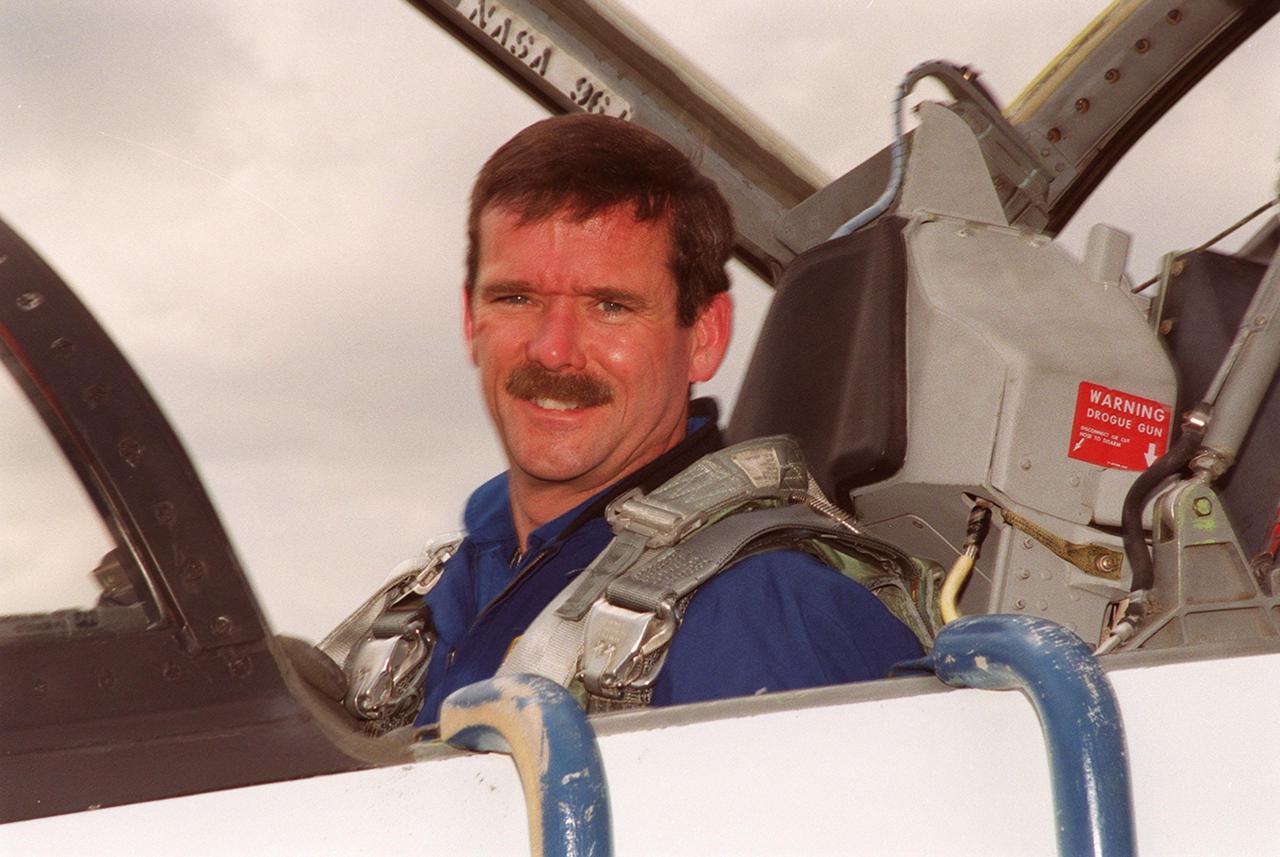
STS-100 Mission Specialist Umberto Guidoni arrives at the KSC Shuttle Landing Facility aboard a T-38 jet aircraft to get ready for launch. Guidoni is with the European Space Agency. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

STS-100 Mission Specialist Umberto Guidoni arrives at the KSC Shuttle Landing Facility aboard a T-38 jet aircraft to get ready for launch. Guidoni is with the European Space Agency. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet_Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

STS075-355-032 (9 March 1996) --- Payload specialist Umberto Guidoni, wearing the shuttle launch and entry garment, prepares for the de-orbit phase of the 16-day flight. Guidoni represents the Italian Space Agency (ASI). The seven member crew was launched aboard the Space Shuttle Columbia on February 22, 1996, and landed on March 9, 1996. Crew members were Andrew M. Allen, mission commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and Maurizio Cheli, European Space Agency (ESA); Jeffrey A. Hoffman and Claude Nicollier, (ESA), all mission specialists; along with Guidoni.

S100-E-5206 (22 April 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist representing the European Space Agency (ESA), remains on Endeavour's flight deck as two crew mates (out of frame) on the deck below get ready for space walk duty. The image was recorded with a digital still camera.

S100-E-5133 (21 April 2001) --- Cosmonaut Yuri V. Lonchakov of Rosaviakosmos shifts the stowage location of water brought up from Earth for use on the International Space Station (ISS). Astronaut Umberto Guidoni of the European Space Agency (ESA) is in the background. The middeck scene was photographed with a digital still camera.

S100-E-5041 (21 April 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist representing the European Space Agency, checks equipment and supplies on the middeck of the Space Shuttle Endeavour as the crew anticipates its union with the International Space Station (ISS). The image was recorded with a digital still camera.

STS100-363-012 (19 April-1 May 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist, sleeps while astronaut Scott E. Parazynski, mission specialist, prepares for his sleep shift on the Space Shuttle Endeavour's middeck.

ISS002-E-6128 (27 April 2001) --- Umberto Guidoni of the European Space Agency (ESA), STS-100 mission specialist, poses for a photograph in Unity Node 1 as the hatch to the Multipurpose Logistics Module (MPLM) Raphaello is being closed near the end of the STS-100 mission. The image was taken with a digital still camera.
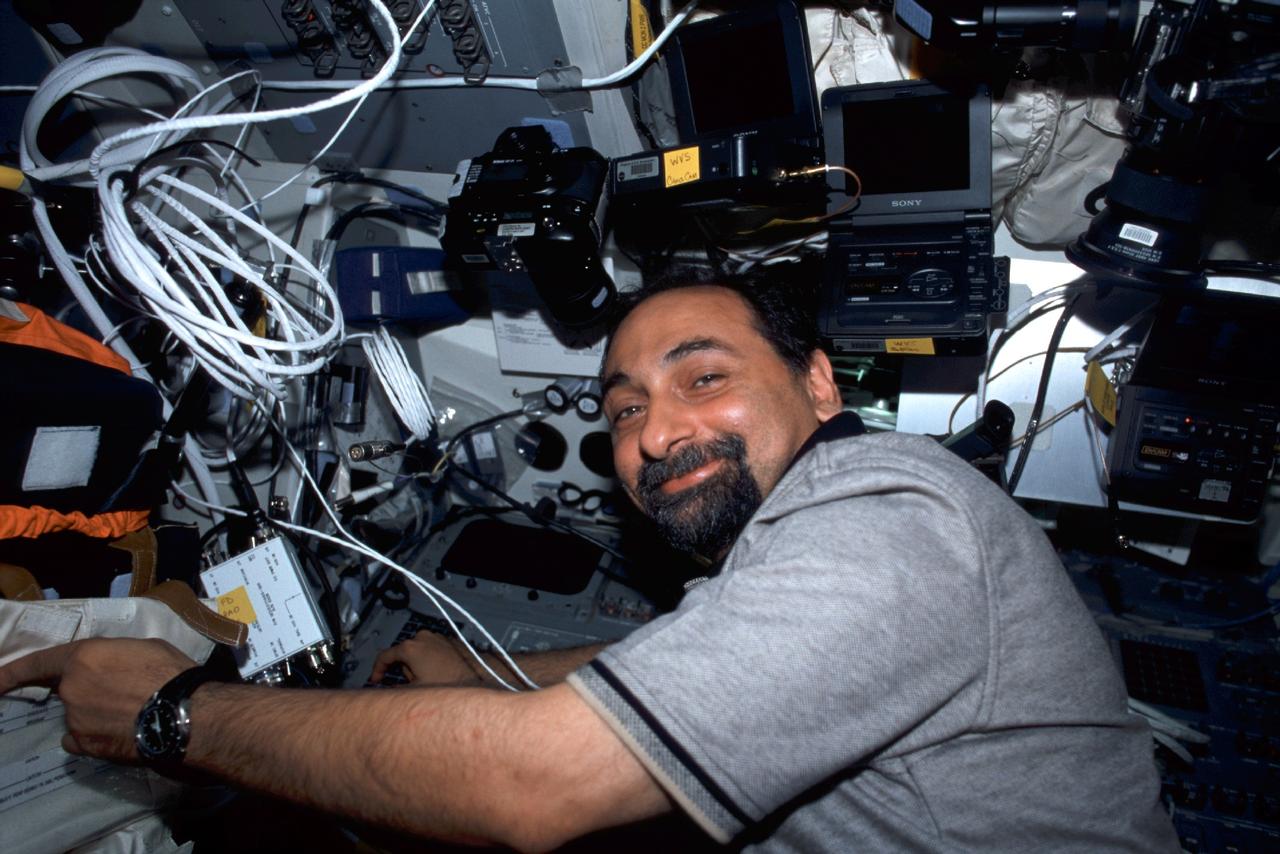
STS100-387-029 (19 April-1 May 2001) --- Astronaut Umberto Guidoni appears to be enjoying his work on the flight deck of the Space Shuttle Endeavour. The STS-100 mission specialist represents the European Space Agency (ESA) and is marking his second space shuttle mission experience.

S100-E-5094 (21 April 2001) --- Astronaut Umberto Guidoni, mission specialist representing the European Space Agency, is surrounded by equipment and supplies onboard the Space Shuttle Endeavour as the spacecraft heads toward a rendezvous with the International Space Station (ISS). The middeck scene was recorded with a digital still camera.

S100-E-5085 (21 April 2001) --- Astronaut Umberto Guidoni, mission specialist representing the European Space Agency, floats toward the galley onboard the Space Shuttle Endeavour as the spacecraft heads toward a rendezvous with the International Space Station (ISS). The middeck scene was recorded with a digital still camera.

The STS-100 crew pose for their inflight crew photograph on the middeck of Endeavour, Orbiter Vehicle (OV) 105, during the STS-100 mission. Front row from left to right are: Mission Specialist (MS) Scott E. Parazynski, Pilot Jeffrey S. Ashby, Commander Kent V. Rominger and MS / Cosmonaut Yuri V. Lonchakov. Back row: MS John L. Phillips, MS Umberto Guidoni and MS Chris A. Hadfield. Lonchakov represents Rosaviakosmos. Guidoni represents European Space Agency (ESA). Hadfield represents Canadian Space Agency (CSA). This image was selected by the STS-100 crew for use in public presentations.

STS100-S-002 (March 2001) --- These international astronauts and cosmonaut have been in training in a number of venues for the April 2001 visit to the International Space Station (ISS). Seated are astronauts Kent V. Rominger (left) and Jeffrey S. Ashby, commander and pilot, respectively, for the STS-100 mission. Standing, from the left, are cosmonaut Yuri V. Lonchakov, with astronauts Scott E. Parazynski, Umberto Guidoni, Chris A. Hadfield and John L. Phillips, all mission specialists. Guidoni represents the European Space Agency (ESA); Hadfield is with the Canadian Space Agency (CSA) and Lonchakov is affiliated with Rosaviakosmos.
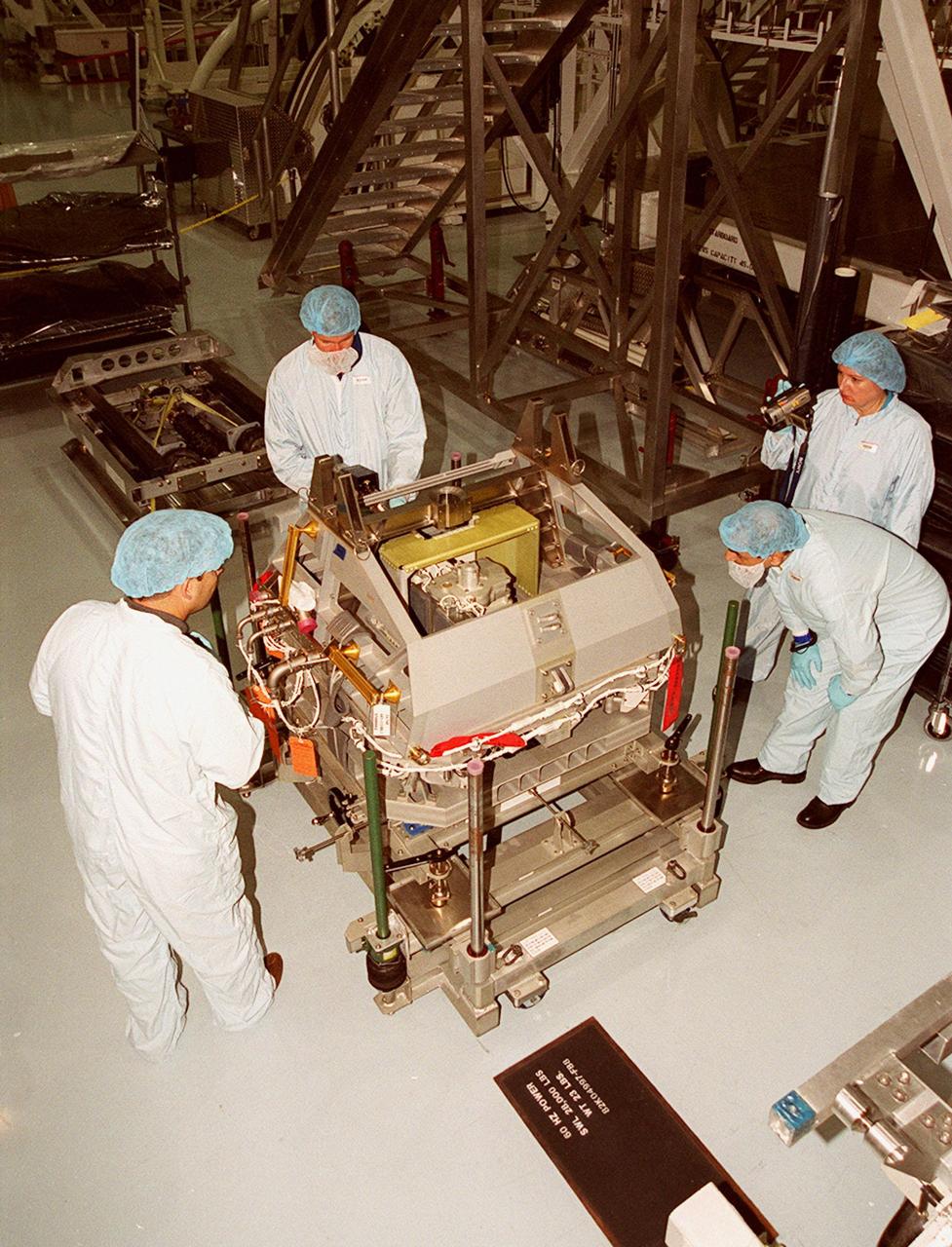
With workers (far left and far right) looking on, STS-100 Commander Kent Rominger tries out a piece of equipment while Mission Specialist Umberto Guidoni (leaning over) watches. Guidoni is with the European Space Agency. Mission STS-100, scheduled to launch April 19, 2001, will include Raffaello as well as the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly
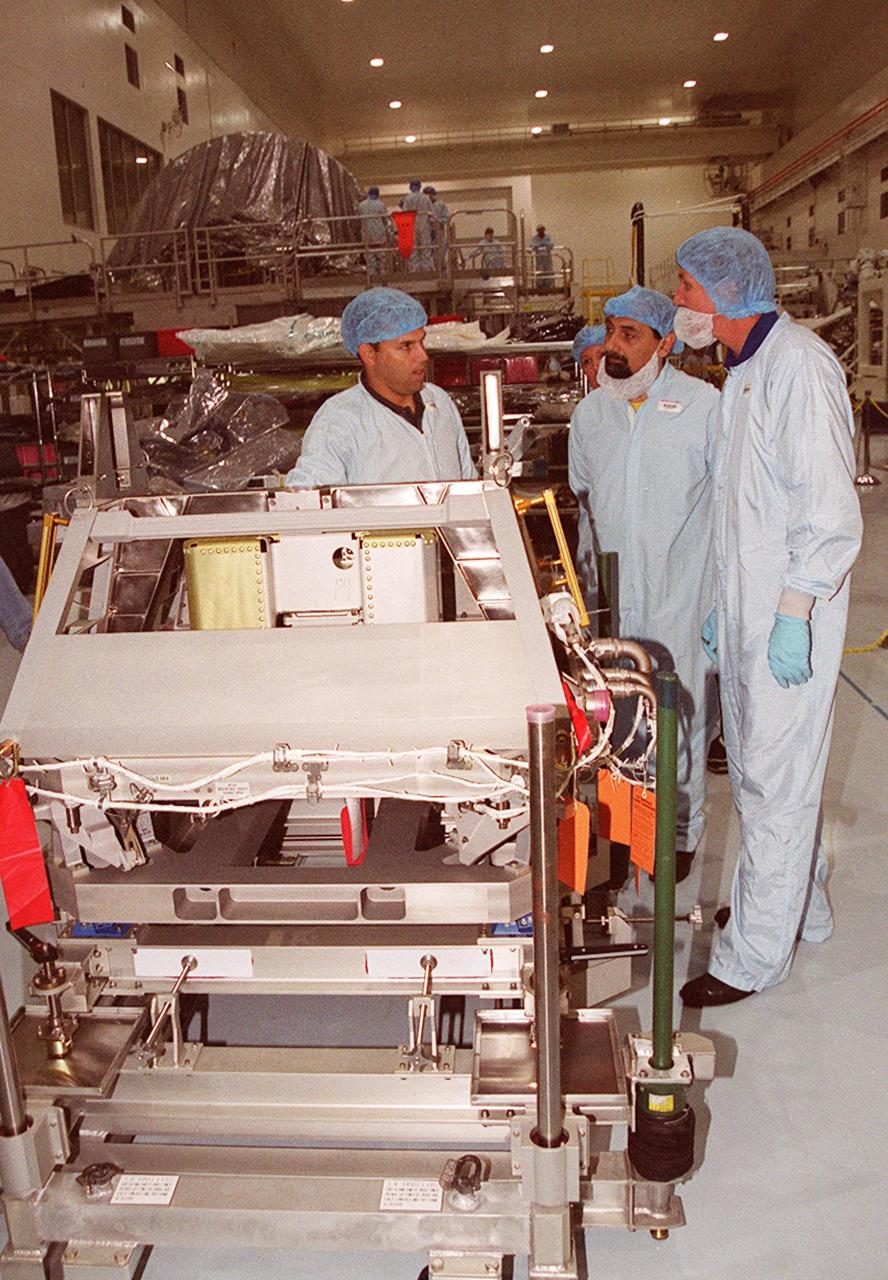
A worker (left) in the Space Station Processing Facility explains use of the equipment in the foreground to STS-100 Mission Specialist Umberto Guidoni (center) and Commander Kent Rominger (right). Guidoni is with the European Space Agency. Mission STS-100, scheduled to launch April 19, 2001, will include the Multi-Purpose Logistics Module (MPLM) Raffaello and the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly

ISS002-E-5927 (24 April 2001) --- Yury V. Usachev, Expedition Two mission commander with STS-100 mission specialists Yuri V. Lonchakov, Scott E. Parazynski, Umberto Guidoni and Chris A. Hadfield, in the Zvezda Service Module, all sport baseball caps representing their home countries, showing the true flavor of the International Space Station (ISS). Usachev and Lonchakov represent Rosaviakosmos, Guidoni represents the European Space Agency (ESA), Parazynski represents NASA, and Hadfield represents the Canadian Space Agency (CSA). The image was taken with a digital still camera.

STS100-S-022 (1 May 2001) --- Six astronauts and a cosmonaut pose with their "home away from home" after the Shuttle Endeavour touched down on a desert runway at Edwards Air Force Base in California to complete the STS-100 mission. From the left are astronauts John L. Phillips, Umberto Guidoni, Chris A. Hadfield, Jeffrey S. Ashby and Kent V. Rominger, along with cosmonaut Yuri V. Lonchakov and astronaut Scott E. Parazynski. Guidoni is with the European Space Agency (ESA); Hadfield represents the Canadian Space Agency; and Lonchakov is associated with Rosaviakosmos. Touchdown occurred at 9:11 a.m. (PDT), May 1, 2001.

Happy to be suiting up for launch, STS-100 Mission Specialist Umberto Guidoni gives thumbs up. Guidoni is with the European Space Agency. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. The mission includes two planned spacewalks for installation of the SSRMS. The mission is also the inaugural flight of Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

STS100-341-003 (19 April-1 May 2001) --- STS-100 and Expedition Two crewmembers pose for traditional in-flight portrait in Destiny laboratory. Bottom, from left, Chris A. Hadfield, Umberto Guidoni, Kent V. Rominger and Susan J. Helms. Middle row, James S. Voss, Yury V. Usachev and Yuri V. Lonchakov. Top, Scott E. Parazynski, John L. Phillips and Jeffrey S. Ashby. Guidoni represents the European Space Agency (ESA); Lonchakov and Usachev are with Rosaviakosmos and Hadfield is associated with the Canadian Space Agency (CSA).

S100-E-5300 (23 April 2001) --- Astronaut Umberto Guidoni, STS-100 mission specialist representing the European Space Agency (ESA), records activity on the Zvezda Service Module following hatch opening and the reunion of STS-100 crew members with the three members of the Expedition Two crew. This image was taken with a digital still camera.

S100-E-5113 (21 April 2001) --- Astronaut Scott E. Parazynski, one of two astronauts assigned to scheduled extravehicular activity (EVA) with the International Space Station (ISS), checks over EVA-related equipment on the middeck of the Space Shuttle Endeavour as the seven-member STS-100 crew busily prepares for its fastly-approaching rendezvous with the orbiting outpost. Astronaut Umberto Guidoni, mission specialist representing the European Space Agency, helps out. The image was recorded with a digital still camera.

JSC2000-07405 (1 Dec. 2000) --- Astronauts Jeffrey S. Ashby (left), STS-100 pilot, and Umberto Guidoni, mission specialist representing the European Space Agency (ESA), use remote monitors to watch the spacewalk simulation by crewmates Scott E. Parazynski and Chris A. Hadfield at the Neutral Buoyancy Laboratory (NBL) near NASA's Johnson Space Center.

S100-E-5063 (21 April 2001) --- Astronaut Umberto Guidoni, mission specialist representing the European Space Agency (ESA), totes some notebooks of STS-100 mission data on the flight deck of the Earth-orbiting Space Shuttle Endeavour as the seven-member crew heads for a rendezvous with the International Space Station (ISS). The image was recorded with a digital still camera

KENNEDY SPACE CENTER, FLA. -- STS-100 Mission Specialist Umberto Guidoni stands near Launch Pad 39A to greet family and friends. Guidoni is with the European Space Agency. The crew is at KSC to complete final flight plan reviews in anticipation of launch. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. The mission includes two planned spacewalks for installation of the SSRMS. The mission is also the inaugural flight of the MPLM Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

The STS-100 crew speak to the media after their arrival at the KSC Shuttle Landing Facility. Standing, from left, are Mission Specialist Chris A. Hadfield, Pilot Jeffrey S. Ashby, Commander Kent V. Rominger at the microphone, and Mission Specialists John L. Phillips, Scott E. Parazynski, Umberto Guidoni and Yuri V. Lonchakov. The international crew represents, along with America, the Canadian Space Agency (Hadfield) , the European Space Agency (Guidoni), and the Russian Aviation and Space Agency (Lonchakov). The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

One of the STS-100 crew members looks at part of the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. The crew comprises Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Space and Aviation Agency

STS100-S-011 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

KENNEDY SPACE CENTER, FLA. -- STS-100 Mission Specialist Umberto Guidoni stands near Launch Pad 39A to greet family and friends. Guidoni is with the European Space Agency. The crew is at KSC to complete final flight plan reviews in anticipation of launch. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet_Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. The mission includes two planned spacewalks for installation of the SSRMS. The mission is also the inaugural flight of the MPLM Raffaello, carrying resupply stowage racks and resupply_return stowage platforms. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

STS100-S-007 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

STS100-S-009 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

STS100-S-005 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency; and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

ISS002-E-7172 (26 April 2001) --- The Expedition Two and STS-100 crew members get together for a group portrait in the emptied Raffaello Multi-Purpose Logistics Module (MPLM). Clockwise from the 12 o'clock point in the circle are Kent V. Rominger, Yuri V. Lonchakov, Yury V. Usachev, Umberto Guidoni, James S. Voss, Jeffrey S. Ashby, Scott E. Parazynski, John L. Phillips and Chris A. Hadfield, with Susan J. Helms at center. Usachev, Helms and Voss are members of three Expedition Two crew, with the other seven serving as the STS-100 crew on the Space Shuttle Endeavour. Usachev and Lonchakov represent Rosaviakosmos; Guidoni is associated with the European Space Agency (ESA); and Hadfield is from the Canadian Space Agency (CSA). The image was taken with a pre-set digital still camera.

STS075-S-004 (22 Feb. 1996) --- The space shuttle Columbia clears the tower to begin the mission. The liftoff occurred on schedule at 3:18:00 p.m. (EST), Feb. 22, 1996. Visible at left is the White Room on the orbiter access arm through which the flight crew had entered the orbiter. Onboard Columbia for the scheduled two-week mission were astronauts Andrew M. Allen, commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and astronauts Maurizio Cheli, Jeffrey A. Hoffman and Claude Nicollier, along with payload specialist Umberto Guidoni. Cheli and Nicollier represent the European Space Agency (ESA), while Guidoni represents the Italian Space Agency (ASI).

In the White Room, STS-100 Mission Specialist Umberto Guidoni is helped with his launch and entry suit by closeout crew members Danny Wyatt (left) and George Schramm (right). Guidoni is with the European Space Agency. The White Room is an environmental chamber at the end of the Orbiter Access Arm that provides entry into the orbiter on the launch pad. The mission will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Canadian-built Space Station Remote Manipulator System and the UHF Antenna. Two spacewalks are planned for installation of the SSRMS, which will be performed by Mission Specialists Scott E. Parazynski and Chris A. Hadfield, who is with the Canadian Space Agency. The mission is also the inaugural flight of the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

NASA_EDWARDS AFB, CALIF. -- After landing at Edwards Air Force Base, Calif., the STS-100 crew poses for a photograph in front of orbiter Endeavour, which successfully launched them to the International Space Station and returned them to Earth. They are (left to right) Mission Specialists John Phillips, Umberto Guidoni and Chris Hadfield; Pilot Jeffrey Ashby; Commander Kent Rominger; and Mission Specialists Yuri Lonchakov and Scott Parazynski. Guidoni is with the European Space Agency, Hadfield with the Canadian Space Agency and Lonchakov with the Russian Aviation and Space Agency. The orbiter and crew logged about 4.9 million statute miles in 186 orbits. Due to unfavorable weather conditions, landing at KSC was waved off. The landing marked the third consecutive landing at EAFB.

In the Space Station Processing Facility, STS-100 Mission Specialist Umberto Guidoni (left) and Commander Kent Rominger (center back), along with two workers, take a close look at equipment on the floor. Guidoni is with the European Space Agency. Mission STS-100, scheduled to launch April 19, 2001, will include the Multi-Purpose Logistics Module (MPLM) Raffaello and the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly

STS100-S-006 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency; and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

The STS-100 crew poses for a photo after their arrival at KSC to complete Terminal Countdown Demonstration Test activities that were postponed earlier. Standing, from left, are Commander Kent V. Rominger; Mission Specialists Umberto Guidoni, John L. Phillips, Chris A. Hadfield and Yuri V. Lonchakov; Pilot Jeffrey S. Ashby; and Mission Specialist Scott E. Parazynski. An international crew, Guidoni is with the European Space Agency, Hadfield the Canadian Space Agency, and Lonchakov the Russian Space and Aviation Agency. The TCDT includes emergency escape training, payload bay walkdown, and a simulated launch countdown. The primary payload comprises the Canadian robotic arm, SSRMS, and Multi-Purpose Logistics Module, Raffaello. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

ISS002-707-048 (21 April 2001) --- One of the three Expedition Two crewmembers aboard the International Space Station (ISS) captured this view of the Space Shuttle Endeavour with payload bay doors open as the shuttle approached the orbital outpost for an April 21, 2001 docking. Raffaello, the second Multipurpose Logistics Module (MPLM) provided by the Italian Space Agency (ASI), can be seen in its berthed position in the cargo bay. Topography in northern Africa serves as a backdrop for the scene. Onboard the station are cosmonaut Yury V. Usachev, Expedition Two commander, and astronauts Susan J. Helms and James S. Voss, flight engineers. Onboard the shuttle are astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, John L. Phillips, Chris A. Hadfield, and Umberto Guidoni, along with cosmonaut Yuri V. Lonchakov. Hadfield represents the Canadian Space Agency (CSA); Guidoni is with the European Space Agency (ESA) and Lonchakov is associated with Rosaviakosmos.

STS075-S-007 (22 Feb. 1996) --- A remote camera at Launch Pad 39B, at the Kennedy Space Center (KSC), recorded this profile view of the space shuttle Columbia as it cleared the tower to begin the mission. The liftoff occurred on schedule at 3:18:00 p.m. (EST), Feb. 22, 1996. Onboard Columbia for the scheduled two-week mission were astronauts Andrew M. Allen, commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and astronauts Maurizio Cheli, Jeffrey A. Hoffman and Claude Nicollier, along with payload specialist Umberto Guidoni. Cheli and Nicollier represent the European Space Agency (ESA), while Guidoni represents the Italian Space Agency (ASI).

STS100-S-008 (19 April 2001) --- A perfect liftoff of the Space Shuttle Endeavour occurred at 2:40:42 p.m. (EDT), April 19, 2001. Onboard were astronauts Kent V. Rominger, Jeffrey S. Ashby, Scott E. Parazynski, Chris A. Hadfield, John L. Phillips and Umberto Guidoni along with cosmonaut Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni represents the European Space Agency and Lonchakov is affiliated with Rosaviakosmos. The scheduled 11-day mission is to deliver and integrate the Spacelab Logistics Pallet/Launch Development Facility, which includes the Space Station Remote Manipulator System (SSRMS) and the UHF antenna. The flight is to include at least two space walks for installation of the SSRMS or Canadarm2 on the orbiting outpost. Also onboard is the Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms.

The STS-100 crew speak to the media after their arrival at the KSC Shuttle Landing Facility. Standing, from left, are Mission Specialist Chris A. Hadfield, Pilot Jeffrey S. Ashby, Commander Kent V. Rominger at the microphone, and Mission Specialists John L. Phillips, Scott E. Parazynski, Umberto Guidoni and Yuri V. Lonchakov. The international crew represents, along with America, the Canadian Space Agency (Hadfield) , the European Space Agency (Guidoni), and the Russian Aviation and Space Agency (Lonchakov). The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet_Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

The STS-100 crew poses for a photo after their arrival at KSC to complete Terminal Countdown Demonstration Test activities that were postponed earlier. Standing, from left, are Commander Kent V. Rominger; Mission Specialists Umberto Guidoni, John L. Phillips, Chris A. Hadfield and Yuri V. Lonchakov; Pilot Jeffrey S. Ashby; and Mission Specialist Scott E. Parazynski. An international crew, Guidoni is with the European Space Agency, Hadfield the Canadian Space Agency, and Lonchakov the Russian Space and Aviation Agency. The TCDT includes emergency escape training, payload bay walkdown, and a simulated launch countdown. The primary payload comprises the Canadian robotic arm, SSRMS, and Multi-Purpose Logistics Module, Raffaello. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

One of the STS-100 crew members looks at part of the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. The crew comprises Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Space and Aviation Agency

STS075-328-026 (25 Feb. 1996) --- Astronaut Claude Nicollier is the only clearly identifiable crewmember in this scene on the aft flight deck, captured during the busy chores associated with deployment of the Tethered Satellite System (TSS). The seven member crew was launched aboard the space shuttle Columbia on Feb. 22, 1996, and landed on March 9, 1996. Crewmembers were Andrew M. Allen, mission commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and Maurizio Cheli, European Space Agency (ESA); Jeffrey A. Hoffman and Nicollier, ESA, all mission specialists; along with payload specialist Umberto Guidoni of the Italian Space Agency (ASI).
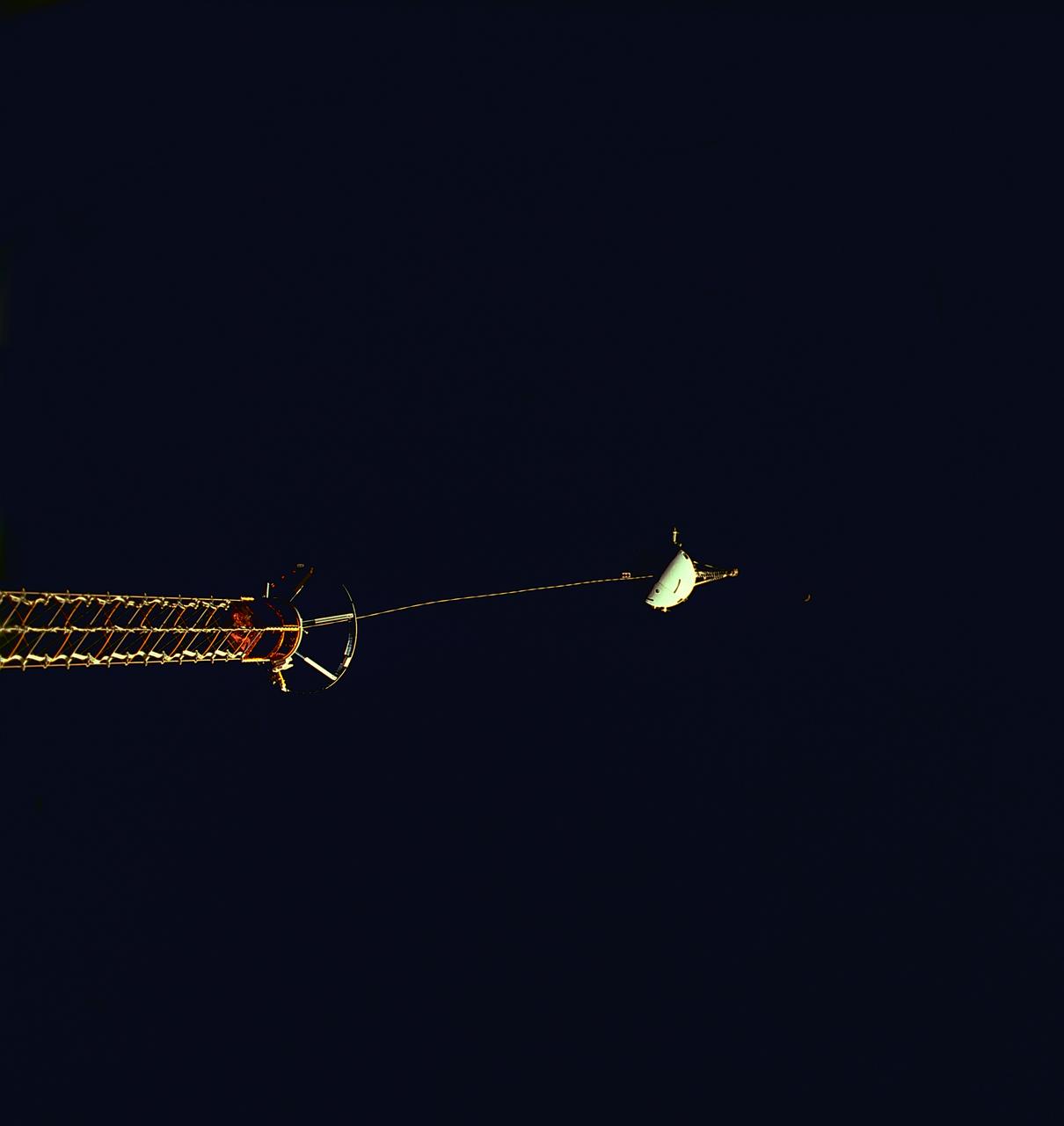
STS075-711-024 (25 Feb. 1996) --- The Tethered Satellite System (TSS) is seen as it is reeled out during early stages of deployment operations. The crew deployed the TSS, which later broke free. The seven member crew was launched aboard the space shuttle Columbia on Feb. 22, 1996, and landed on March 9, 1996. Crewmembers were Andrew M. Allen, mission commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and Maurizio Cheli European Space Agency (ESA); Jeffrey A. Hoffman and Claude Nicollier, ESA, all mission specialists; along with payload specialist Umberto Guidoni of the Italian Space Agency (ASI).

STS-100 Commander Kent Rominger and Mission Specialist Umberto Guidoni, who is with the European Space Agency, look over the inside of Raffaello, a Multi-Purpose Logistics Module. Mission STS-100, scheduled to launch April 19, 2001, will include Raffaello as well as the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly

Ready to take the wheel on the M-113 armored carrier is STS-100 Mission Specialist Umberto Guidoni. He and the rest of the crew are taking part in Terminal Countdown Demonstration Test activities, which include emergency escape training, payload walkdown and a simulated launch countdown. The tracked vehicle could be used by the crew in the event of an emergency at the pad during which the crew must make a quick exit from the area. The primary payload on mission STS-100 comprises the Canadian robotic arm, SSRMS, and Multi-Purpose Logistics Module, Raffaello. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

JSC2000-07406 (1 December 2000) --- Astronaut Umberto Guidoni (left), STS-100 mission specialist representing the European Space Agency (ESA), views a closed-circuit televising of an underwater space walk simulation performed by two crew mates. The simulation of the scheduled spring 2001 space walk took place at the Neutral Buoyancy Laboratory (NBL) at the Sonny Carter Training Facility. Astronaut Jeffrey S. Ashby, pilot, is at center. Astronauts Scott E. Parazynski of the NASA-Johnson Space Center and Chris A. Hadfield of the Canadian Space Agency (CSA), both mission specialists and both equipped with training versions of the extravehicular mobility unit (EMU) space suits, were in the water at the time.

The Space Shuttle Columbia (STS-75) cleared the tower following an on-time liftoff from Launch Pad 39B. Visible at lower left is the white room on the orbiter access arm through which the flight crew entered the orbiter earlier. Columbia's mission lasted 14 days and included retesting of the Tethered Satellite System (TSS-1R) and the third flight of the United States Microgravity Payload (USMP-3), both of which are managed by scientist at Marshall Space Flight Center. Included in Columbia's flight crew were members of the European Space Agency (ESA) and the Italian Space Agency (ASI), Mission Specialists Maurizio Cheli, Claude Nicollier and Payload Specialist Umberto Guidoni, respectively.

STS075-S-002 (December 1995) --- With their major payload as the backdrop, members of the crew pose for the traditional crew portrait. The crew will deploy and work with the Tethered Satellite System (TSS-1R). Seated at center are astronauts Scott J. Horowitz (left), pilot; and Andrew M. Allen, commander. Astronaut Franklin R. Chang-Diaz (front right) is payload commander. In the rear are (left to right) European Space Agency (ESA) astronaut Maurizio Cheli, mission specialist; payload specialist Umberto Guidoni of the Italian Space Agency (ASI); Jeffrey A. Hoffman and ESA astronaut Claude Nicollier, mission specialists.

In the White Room, Mission Specialists Scott E. Parazynski (left) and Umberto Guidoni (right) help Yuri V. Lonchakov exit Endeavour. They and the rest of the crew are taking part in Terminal Countdown Demonstration Test activities that include emergency escape training at the pad and the simulated launch countdown. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

The crew on mission STS-100 poses in the White Room during Terminal Countdown Demonstration Test activities. Standing, from left, are Mission Specialists Scott E. Parazynski, Yuri Lonchakov, and Umberto Guidoni; Pilot Jeffrey S. Ashby; Commander Kent V. Rominger; Mission Specialist Chris A. Hadfield; and Mission Specialist John L. Phillips. The TCDT includes emergency escape training, payload bay walkdown, and a simulated launch countdown. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS075-351-022 (22 Feb.- 9 March 1996) --- The space shuttle Columbia's vertical stabilizer appears to point to the four stars of the Southern Cross. The scene was captured with a 35mm camera just prior to a sunrise. The seven member crew was launched aboard the space shuttle Columbia on Feb. 22, 1996, and landed on March 9, 1996. Crew members were Andrew M. Allen, mission commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and Maurizio Cheli, European Space Agency (ESA); Jeffrey A. Hoffman and Claude Nicollier, ESA, all mission specialists; along with payload specialist Umberto Guidoni of the Italian Space Agency (ASI).

The crew on mission STS-100 poses in the White Room during Terminal Countdown Demonstration Test activities. Standing, from left, are Mission Specialists Scott E. Parazynski, Yuri Lonchakov, and Umberto Guidoni; Pilot Jeffrey S. Ashby; Commander Kent V. Rominger; and Mission Specialists Chris A. Hadfield and John L. Phillips. The TCDT includes emergency escape training, payload bay walkdown, and a simulated launch countdown. The primary payload comprises the Canadian robotic arm, SSRMS, and Multi-Purpose Logistics Module, Raffaello. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

In the Space Station Processing Facility, STS-100 Commander Kent Rominger (left) tries out a piece of equipment while a worker (center) gives directions. Looking on at right is Mission Specialist Umberto Guidoni, with the European Space Agency. Mission STS-100, scheduled to launch April 19, 2001, will include Raffaello as well as the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly
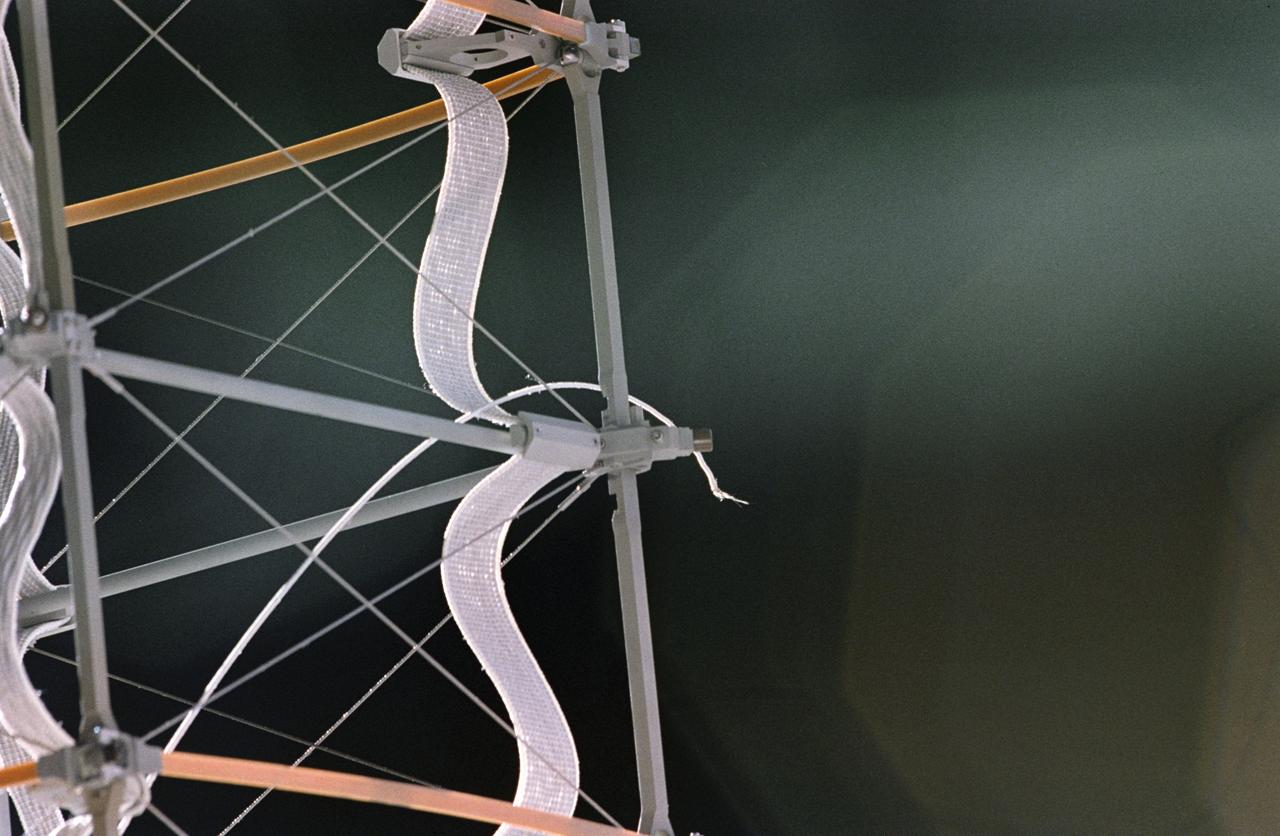
STS075-325-014 (25 Feb. 1996) --- The frayed end of the tether portion of the Tethered Satellite System (TSS) is seen at the end of the supportive boom. On February 25, 1996, the crew deployed the TSS, which later broke free. The seven member crew was launched aboard the Space Shuttle Columbia on February 22, 1996, and landed on March 9, 1996. Crewmembers were Andrew M. Allen, mission commander; Scott J. Horowitz, pilot; Franklin R. Chang-Diaz, payload commander; and Maurizio Cheli, European Space Agency (ESA); Jeffrey A. Hoffman and Claude Nicollier (ESA), all mission specialists; along with payload specialist Umberto Guidoni of the Italian Space Agency (ASI).
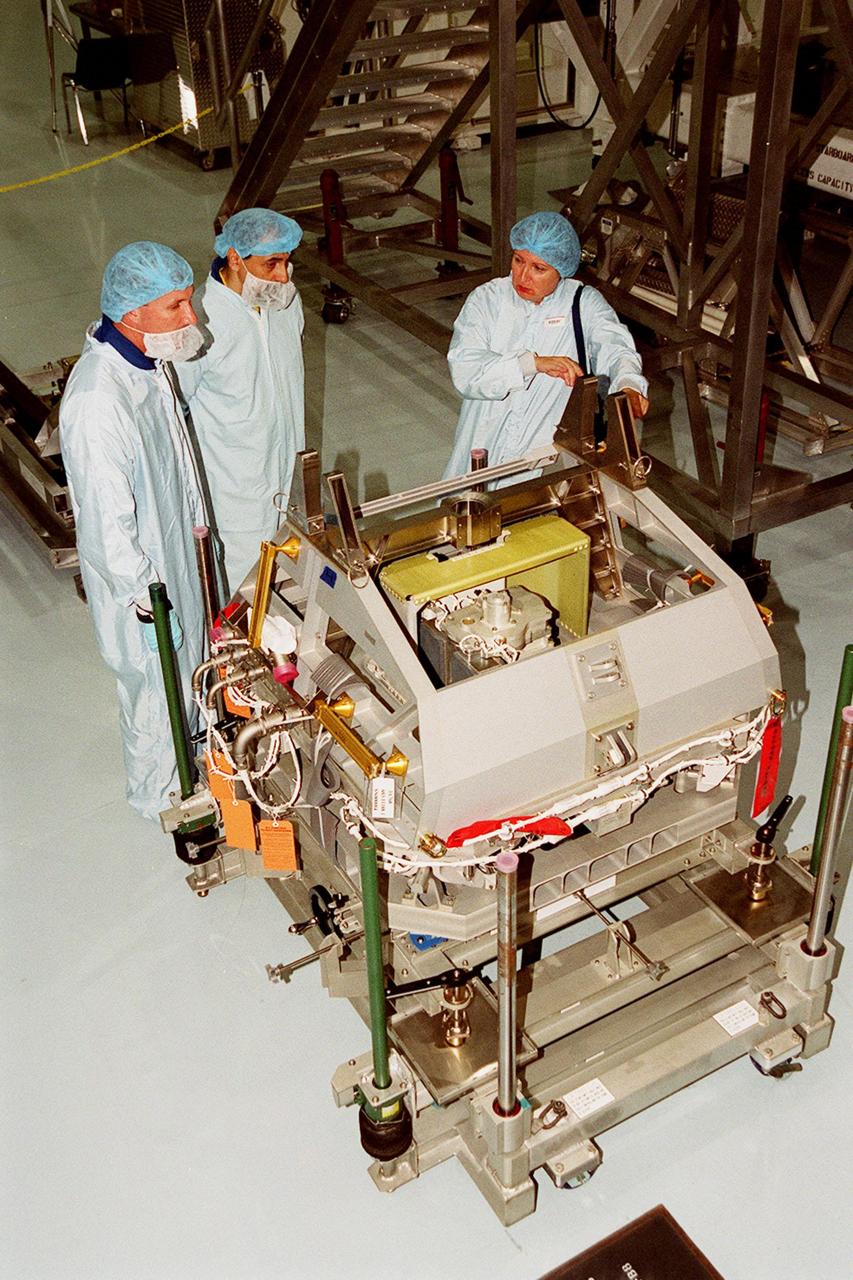
In the Space Station Processing Facility, STS-100 Commander Kent Rominger and Mission Specialist Umberto Guidoni, who is with the European Space Agency, look over equipment on the floor. Mission STS-100, scheduled to launch April 19, 2001, will include the Multi-Purpose Logistics Module (MPLM) Raffaello and the Space Station Remote Manipulator System (SSRMS) as its payload. MPLMs are pressurized modules that will serve as the International Space Station's “moving vans,” carrying laboratory racks filled with equipment, experiments and supplies to and from the station aboard the Space Shuttle. The SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly

Members of the STS-100 crew, dressed in protective clothing, take a closer look at part of the mission payload, the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. From left are Mission Specialists John L. Phillips, Yuri V. Lonchakov, Umberto Guidoni, and Chris A. Hadfield. Lonchakov is with the Russian Space and Aviation Agency, Guidoni the European Space Agency, and Hadfield the Canadian Space Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialist Scott E. Parazynski

STS-100 Mission Specialist Umberto Guidoni arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

In the Operations and Checkout Building, a suit technician adjusts the helmet of STS-100 Mission Specialist John L. Phillips. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, Scott E. Parazynski, Umberto Guidoni and Yuri V. Lonchakovare taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

Members of the STS-100 crew, dressed in protective clothing, take a look at part of the mission payload, the Canadian robotic arm, SSRMS, from the top of a workstand in the Space Station Processing Facility. From left are Mission Specialists John L. Phillips, Umberto Guidoni and Yuri V. Lonchakov. Guidoni is with the European Space Agency and Lonchakov is with the Russian Space and Aviation Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski and Chris A. Hadfield, who is with the Canadian Space Agency
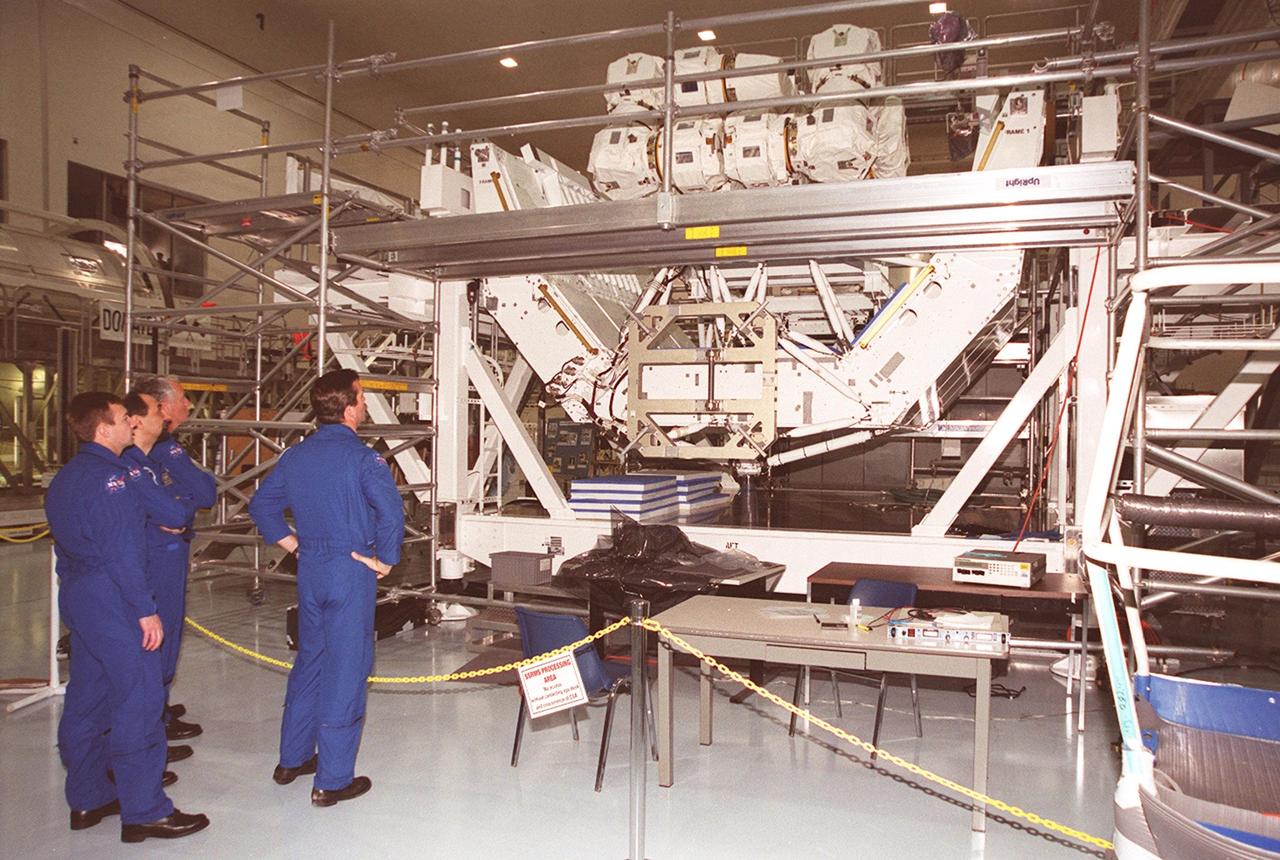
Members of the STS-100 crew look at part of the mission payload, the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. Standing, from left, are Mission Specialists Yuri V. Lonchakov, Umberto Guidoni, John L. Phillips and Chris A. Hadfield. Lonchakov is with the Russian Space and Aviation Agency, Guidoni the European Space Agency, and Hadfield the Canadian Space Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialist Scott E. Parazynski

STS-100 Commander Kent V. Rominger (left) gets a review of equipment during suitup in the Operations and Checkout Building. He and the rest of the crew Pilot Jeff Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Commander Kent V. Rominger climbs out of the T-38 jet aircraft on his arrival at KSC. He and the rest of the crew Pilot Jeff Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to take part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

Members of the STS-100 crew, dressed in protective clothing, take a closer look at part of the mission payload, the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. From left are Mission Specialists John L. Phillips, Yuri V. Lonchakov, Umberto Guidoni, and Chris A. Hadfield. Lonchakov is with the Russian Space and Aviation Agency, Guidoni the European Space Agency, and Hadfield the Canadian Space Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialist Scott E. Parazynski

The STS-100 crew walks out of the Operations and Checkout Building on their way to Launch Pad 39A and liftoff for an 11-day mission to the International Space Station. Leading in front are Pilot Jeffrey S. Ashby (left) and Commander Kent V. Rominger (right). Behind them are (left to right) Mission Specialists Umberto Guidoni, Yuri Lonchakov and Chris A. Hadfield. Following in the rear are Mission Specialists Scott E. Parazynski (left) and John L. Phillips (right). An international crew, Guidoni represents the European Space Agency, Lonchakov the Russian Aviation and Space Agency and Hadfield the Canadian Space Agency. Space Shuttle Endeavour and its crew will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator System and the UHF Antenna. The mission includes two planned spacewalks for installation of the SSRMS, which will be performed by Parazynski and Hadfield. The mission is also the inaugural flight of Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

In the Operations and Checkout Building, STS-100 Mission Specialist Yuri V. Lonchakov okays the adjustment of his launch suit. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, Scott E. Parazynski, John L. Phillips and Umberto Guidoni are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- The STS-100 crew poses for a photo on the 195-foot level of Launch Pad 39A’s Fixed Service Structure. Standing, from left, are Mission Specialists Scott Umberto Guidoni, Scott E. Parazynski, Chris A. Hadfield, Yuri V. Lonchakov, and John L. Phillips; Commander Kent V. Rominger; and Pilot Jeffrey S. Ashby. Hadfield is with the Canadian Space Agency, Guidoni with the European Space Agency and Lonchakov with the Russian Aviation and Space Agency. Behind them can be seen the tip of one white solid rocket booster and the orange external tank. The STS-100 mission is carrying the Multi-Purpose Logistics Module Raffaello and the SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Umberto Guidoni arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

In the Operations and Checkout Building, STS-100 Mission Specialist Scott E. Parazynski smiles for the camera during suit fit and check. Parazynski and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, John L. Phillips, Umberto Guidoni and Yuri V. Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Pilot Jeffrey S. Ashby arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Pilot Jeffrey S. Ashby arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Commander Kent V. Rominger climbs out of the T-38 jet aircraft on his arrival at KSC. He and the rest of the crew Pilot Jeff Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to take part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

In the Operations and Checkout Building, STS-100 Mission Specialist Chris Hadfield gets his launch suit adjusted by a suit technician. Hadfield and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Chris Hadfield smiles for the camera during suitup in the Operations and Checkout Building. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Scott E. Parazynski is questioned by a suit technician about the fit of his helmet and suit. Parazynski and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Yuri Lonchakov arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, and Umberto Guidoni are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A
STS-100 Mission Specialist Chris Hadfield arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Yuri Lonchakov arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, Scott E. Parazynski, John L. Phillips, and Umberto Guidoni are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialist Chris Hadfield arrives at KSC for Terminal Countdown Demonstration Test activities. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski, John L. Phillips, Umberto Guidoni and Yuri Lonchakov are going to be taking part in emergency escape training at the pad, equipment familiarization and a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A
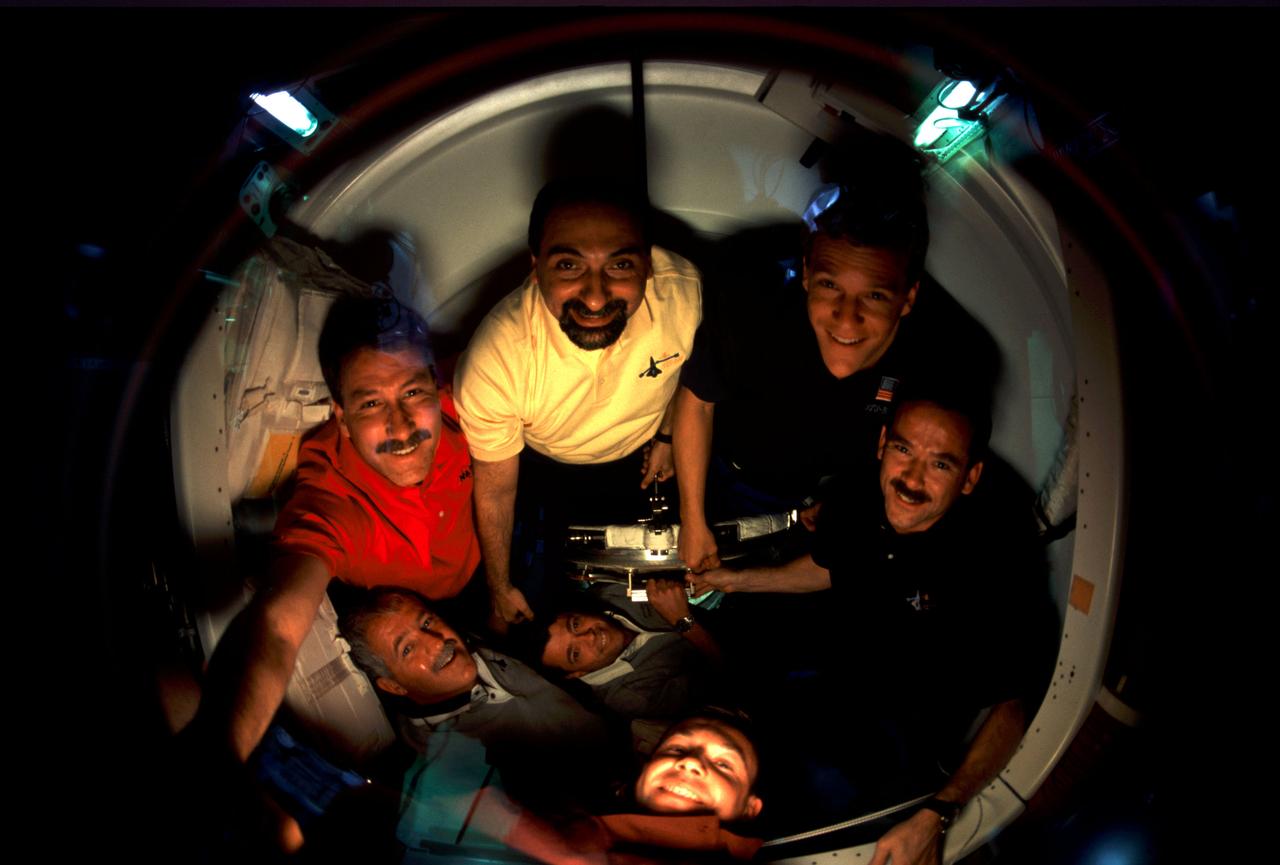
ISS002-311-032 (23 April 2001) --- The six astronauts and one cosmonaut comprising the STS-100 crew assemble in the Pressurized Mating Adapter (PMA-2) while waiting to visit the Expedition Two crew and the International Space Station (ISS). With his arm extended to left foreground is astronaut Kent V. Rominger, STS-100 mission commander. In the circular arrangement of crewmembers, clockwise from Rominger's position, are astronauts Umberto Guidoni, Scott E. Parazynski, Chris A. Hadfield, Jeffrey S. Ashby and John L. Phillips. Cosmonaut Yuri V. Lonchakov's head emerges at bottom center. On the other side of the glass were the Expedition Two crewmembers--cosmonaut Yury V. Usachev and astronauts James S. Voss and Susan J. Helms. Lonchakov and Usachev represent Rosaviakosmos; Hadfield is with the Canadian Space Agency (CSA) and Guidoni is associated with the European Space Agency (ESA). The ten were beginning a day that went on to see the first opening of hatches linking the two spacecraft, an impressive first step by the station's new Canadarm2 and the berthing to the station of Raffaello, the Italian-built logistics module. Hatch opening was set for 4 a.m. (CDT), April 23.

In the Operations and Checkout Building, STS-100 Mission Specialist Umberto Guidoni has his launch suit adjusted. He and the rest of the crew Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris A. Hadfield, Scott E. Parazynski, John L. Phillips and Yuri V. Lonchakov are taking part in Terminal Countdown Demonstration Test activities, from emergency escape training at the pad to a simulated launch countdown. An international crew, Hadfield is with the Canadian Space Agency, Guidoni the European Space Agency and Lonchakov the Russian Aviation and Space Agency. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex and has a unique ability to switch ends as it works, “inchworming” along the Station’s exterior. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

Leaving the Operations and Checkout Building, the STS-100 crew waves to well-wishers and heads to the Astrovan for transport to Launch Pad 39A. . Leading in front are Pilot Jeffrey S. Ashby (left) and Commander Kent V. Rominger (right). Behind them are (left to right) Mission Specialists Yuri Lonchakov and Chris A. Hadfield. Next are Mission Specialists Umberto Guidoni (left) and John L. Phillips (right). Following in the rear is Mission Specialist Scott E. Parazynski. An international crew, Guidoni represents the European Space Agency, Lonchakov the Russian Aviation and Space Agency and Hadfield the Canadian Space Agency. Space Shuttle Endeavour and its crew will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator System and the UHF Antenna. The mission includes two planned spacewalks for installation of the SSRMS, which will be performed by Parazynski and Hadfield. The mission is also the inaugural flight of Multi-Purpose Logistics Module Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff of Space Shuttle Endeavour on mission STS-100 is scheduled at 2:41 p.m. EDT April 19
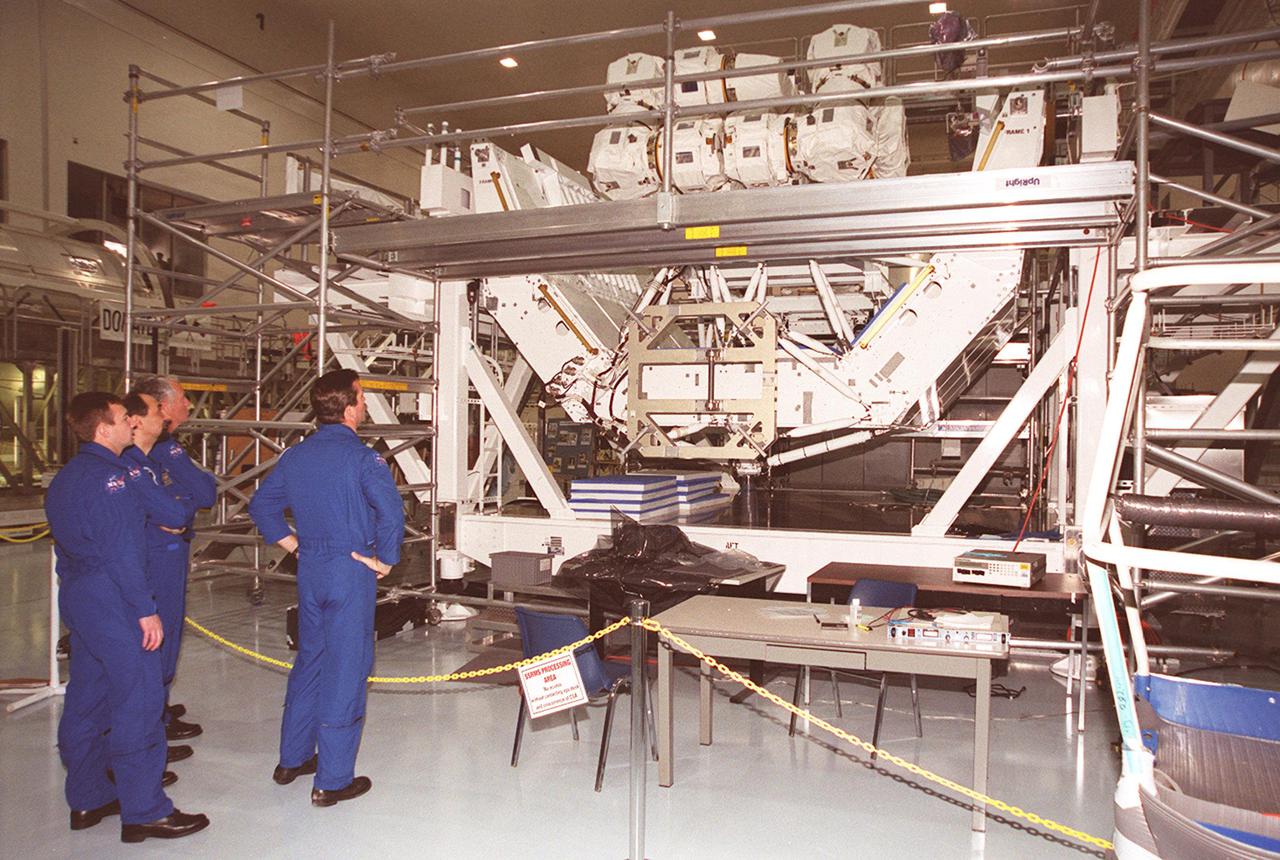
Members of the STS-100 crew look at part of the mission payload, the Canadian robotic arm, SSRMS, which is on a workstand in the Space Station Processing Facility. Standing, from left, are Mission Specialists Yuri V. Lonchakov, Umberto Guidoni, John L. Phillips and Chris A. Hadfield. Lonchakov is with the Russian Space and Aviation Agency, Guidoni the European Space Agency, and Hadfield the Canadian Space Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialist Scott E. Parazynski

Members of the STS-100 crew, dressed in protective clothing, take a look at part of the mission payload, the Canadian robotic arm, SSRMS, from the top of a workstand in the Space Station Processing Facility. From left are Mission Specialists John L. Phillips, Umberto Guidoni and Yuri V. Lonchakov. Guidoni is with the European Space Agency and Lonchakov is with the Russian Space and Aviation Agency. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. Mission STS-100 is scheduled to launch on Space Shuttle Endeavour April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC, with a crew of seven. Other crew members are Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Scott E. Parazynski and Chris A. Hadfield, who is with the Canadian Space Agency

KENNEDY SPACE CENTER, FLA. -- The STS-100 crew poses for a photo on the 195-foot level of Launch Pad 39A’s Fixed Service Structure. Standing, from left, are Mission Specialists Scott Umberto Guidoni, Scott E. Parazynski, Chris A. Hadfield, Yuri V. Lonchakov, and John L. Phillips; Commander Kent V. Rominger; and Pilot Jeffrey S. Ashby. Hadfield is with the Canadian Space Agency, Guidoni with the European Space Agency and Lonchakov with the Russian Aviation and Space Agency. Behind them can be seen the tip of one white solid rocket booster and the orange external tank. The STS-100 mission is carrying the Multi-Purpose Logistics Module Raffaello and the SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- The STS-100 crew gives thumbs up on launch as they gather near Launch Pad 39A to greet family and friends. Starting at left, they are Mission Specialists Chris A. Hadfield, John L. Phillips and Umberto Guidoni; Commander Kent V. Rominger; Pilot Jeffrey S. Ashby; and Mission Specialists Scott E. Parazynski and Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni is with the European Space Agency; and Lonchakov is with the Russian Aviation and Space Agency. In the background on the pad can be seen the tips of Space Shuttle Endeavour’s orange external tank and white solid rocket boosters. The 80-foot lightning rod towers above the Shuttle and service structures. The crew is at KSC to complete final flight plan reviews in anticipation of launch. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet_Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. The mission includes two planned spacewalks for installation of the SSRMS. The mission is also the inaugural flight of the MPLM Raffaello, carrying resupply stowage racks and resupply_return stowage platforms. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19

KENNEDY SPACE CENTER, FLA. -- The STS-100 crew gives thumbs up on launch as they gather near Launch Pad 39A to greet family and friends. Starting at left, they are Mission Specialists Chris A. Hadfield, John L. Phillips and Umberto Guidoni; Commander Kent V. Rominger; Pilot Jeffrey S. Ashby; and Mission Specialists Scott E. Parazynski and Yuri V. Lonchakov. Hadfield is with the Canadian Space Agency; Guidoni is with the European Space Agency; and Lonchakov is with the Russian Aviation and Space Agency. In the background on the pad can be seen the tips of Space Shuttle Endeavour’s orange external tank and white solid rocket boosters. The 80-foot lightning rod towers above the Shuttle and service structures. The crew is at KSC to complete final flight plan reviews in anticipation of launch. The 11-day mission to the International Space Station will deliver and integrate the Spacelab Logistics Pallet/Launch Deployment Assembly, which includes the Space Station Remote Manipulator system and the UHF Antenna, and the Multi-Purpose Logistics Module Raffaello. The mission includes two planned spacewalks for installation of the SSRMS. The mission is also the inaugural flight of the MPLM Raffaello, carrying resupply stowage racks and resupply/return stowage platforms. Liftoff on mission STS-100 is scheduled at 2:41 p.m. EDT April 19
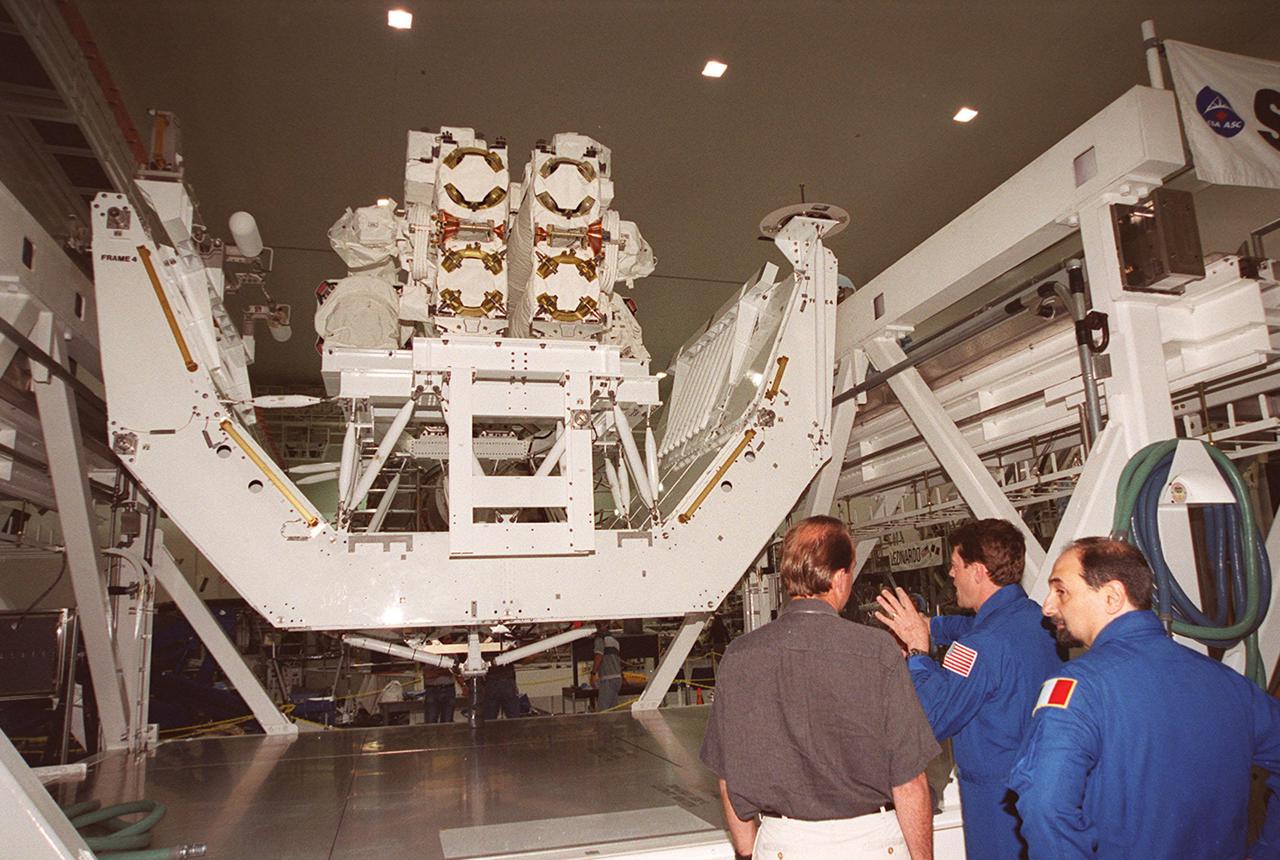
KSC’s PAO videographer, Glenn Benson (left) listens to STS-100 Pilot Jeffrey S. Ashby explain use of the Canadian robotic arm, SSRMS (left), in the Space Station Processing Facility. At right is Mission Specialist Umberto Guidoni. The STS-100 crew is at KSC for Terminal Countdown Demonstration Test activities that include emergency escape training at the pad and a simulated launch countdown. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

STS-100 Mission Specialists Scott Parazynski (left) and Chris Hadfield (right), who is with the Canadian Space Agency, look over equipment that will be used during their mission. They are taking part in a Crew Equipment Interface Test (CEIT) at KSC, along with other crew members Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists John L. Phillips, Umberto Guidoni, who is with the European Space Agency, and Yuri Lonchakov, who is with the Russian Aviation and Space Agency. The orbiter is also carrying the Multi-Purpose Logistics Module Raffaello to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

KENNEDY SPACE CENTER, FLA. -- The STS-100 crew gathers on the 195-foot level of the Fixed Service Structure for slidewire basket training. The baskets are part of an emergency escape system from the orbiter and the pad. Seen, from left, are Pilot Jeffrey S. Ashby; Mission Specialists Chris A. Hadfield, Yuri V. Lonchakov, Scott E. Parazynski and Umberto Guidoni; Commander Kent V. Rominger; and on the right, Mission Specialist John L. Phillips. The training is part of Terminal Countdown Demonstration Test activities, which also include payload walkdown and a simulated launch countdown. The primary payload on mission STS-100 comprises the Canadian robotic arm, SSRMS, and Multi-Purpose Logistics Module, Raffaello. Launch of Space Shuttle Endeavour on mission STS-100 is targeted for April 19 at 2:41 p.m. EDT from Launch Pad 39A

In the Orbiter Processing Facility bay 2, members of the STS-100 crew get a look at the payload inside Endeavour. Stretching the length of the payload bay is the Canadian robotic arm, SSRMS, that they will be attaching to the Space Station for use in assembling future components. . The crew, who are taking part in a Crew Equipment Interface Test (CEIT), comprises Commander Kent V. Rominger, Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, who is with the Canadian Space Agency, Scott Parazynski, John L. Phillips, Umberto Guidoni, who is with the European Space Agency, and Yuri Lonchakov, who is with the Russian Aviation and Space Agency. Endeavour is also carrying the Multi-Purpose Logistics Module Raffaello to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A
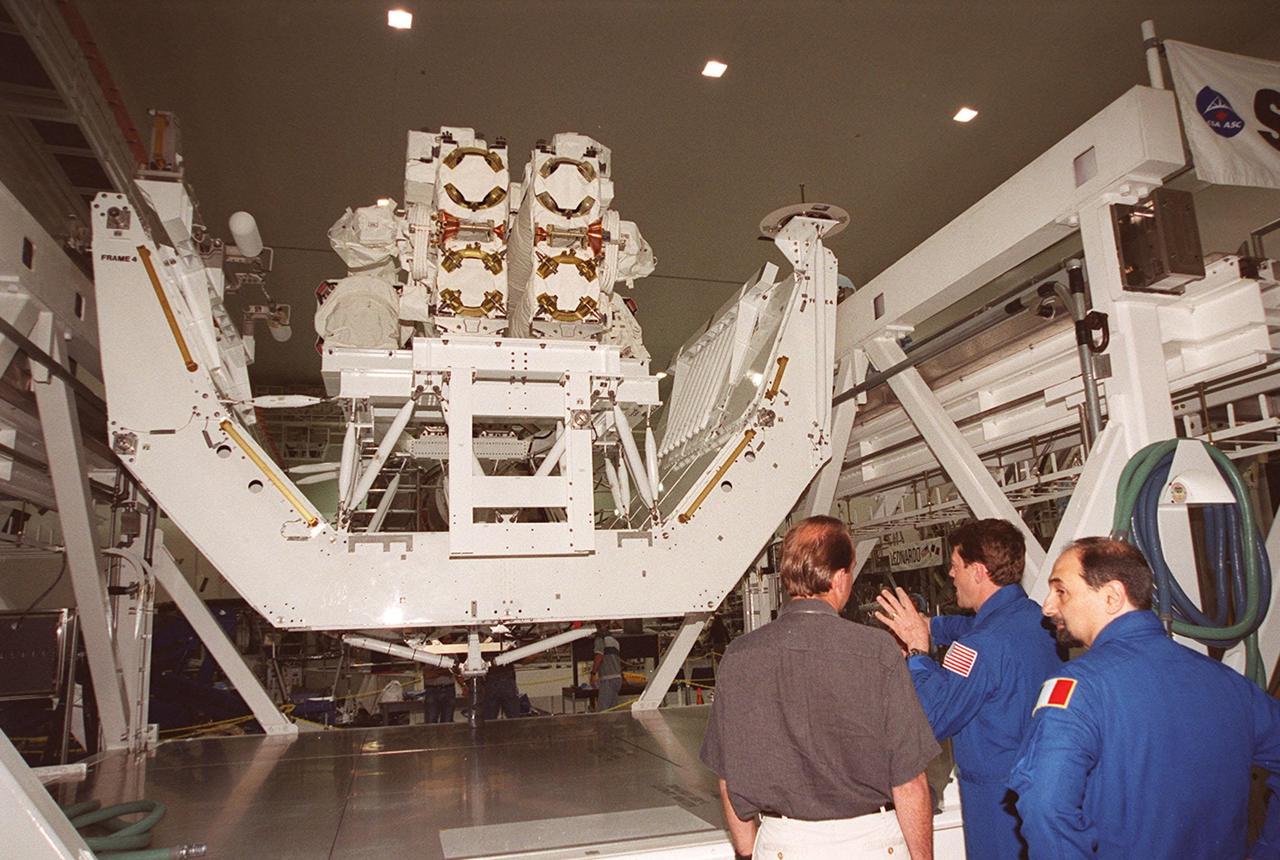
KSC’s PAO videographer, Glenn Benson (left) listens to STS-100 Pilot Jeffrey S. Ashby explain use of the Canadian robotic arm, SSRMS (left), in the Space Station Processing Facility. At right is Mission Specialist Umberto Guidoni. The STS-100 crew is at KSC for Terminal Countdown Demonstration Test activities that include emergency escape training at the pad and a simulated launch countdown. The mission is carrying the Multi-Purpose Logistics Module Raffaello and the SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. The SSRMS is crucial to the continued assembly of the orbiting complex. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A

During a Crew Equipment Interface Test (CEIT) at KSC, STS-100 Commander Kent V. Rominger checks out the windshield in orbiter Endeavour. Other crew members at KSC for the CEIT are Pilot Jeffrey S. Ashby and Mission Specialists Chris Hadfield, who is with the Canadian Space Agency, Scott Parazynski, John L. Phillips, Umberto Guidoni, who is with the European Space Agency, and Yuri Lonchakov, who is with the Russian Aviation and Space Agency. The orbiter is carrying the Multi-Purpose Logistics Module Raffaello and the Canadian robotic arm, SSRMS, to the International Space Station. Raffaello carries six system racks and two storage racks for the U.S. Lab. Launch of mission STS-100 is scheduled for April 19 at 2:41 p.m. EDT from Launch Pad 39A