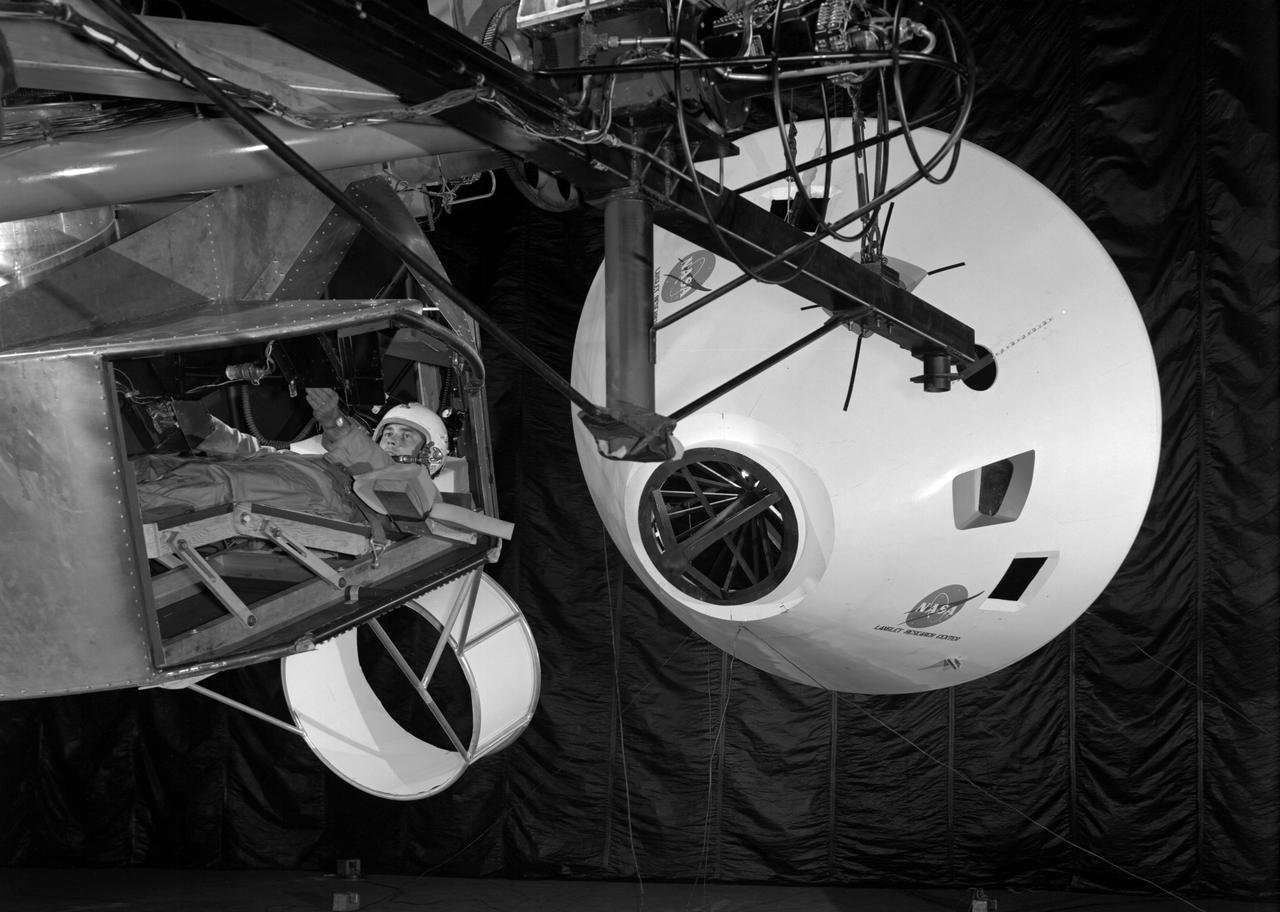
![Astronaut James Lovell at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-09093/LRC-1963-B701_P-09093~medium.jpg)
Astronaut James Lovell at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronaut James Lovell at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-09094/LRC-1963-B701_P-09094~medium.jpg)
Astronaut James Lovell at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronaut Frank Borman at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-09368/LRC-1963-B701_P-09368~medium.jpg)
Astronaut Frank Borman at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronaut Charles Conrad at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-09519/LRC-1963-B701_P-09519~medium.jpg)
Astronaut Charles Conrad at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronauts Charles Conrad (left) and John W. Young (right) at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-09520/LRC-1963-B701_P-09520~medium.jpg)
Astronauts Charles Conrad (left) and John W. Young (right) at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronaut Virgil "Gus" Grissom at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-01515/LRC-1963-B701_P-01515~medium.jpg)
Astronaut Virgil "Gus" Grissom at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
![Astronaut Virgil "Gus" Grissom at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "](https://images-assets.nasa.gov/image/LRC-1963-B701_P-01516/LRC-1963-B701_P-01516~medium.jpg)
Astronaut Virgil "Gus" Grissom at the controls of the Visual Docking Simulator. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator.] It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target." "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "

Alan Shepard and engineer looking at equipment, alone in Visual Docking Simulator, with engineers in Visual Docking Simulator.

Alan Shepard and engineer looking at equipment, alone in Visual Docking Simulator, with engineers in Visual Docking Simulator.

iss048e045888 (07/29/2016) --- The visual scope looking down at the Pirs docking compartment on the Russian segment of the International Space Station. Currently seen docked to Pirs is the ISS Progress 64 cargo craft, which delivered over 3 tons of food, fuel and supplies to the crew of Expedition 48

S73-02395 (August 1973) --- An artist?s concept illustrating an Apollo-type spacecraft (on left) about to dock with a Soviet Soyuz-type spacecraft. A recent agreement between the United States and the Union of Soviet Socialist Republics provides for the docking in space of the Soyuz and Apollo-type spacecraft in Earth orbit in 1975. The joint venture is called the Apollo-Soyuz Test Project.
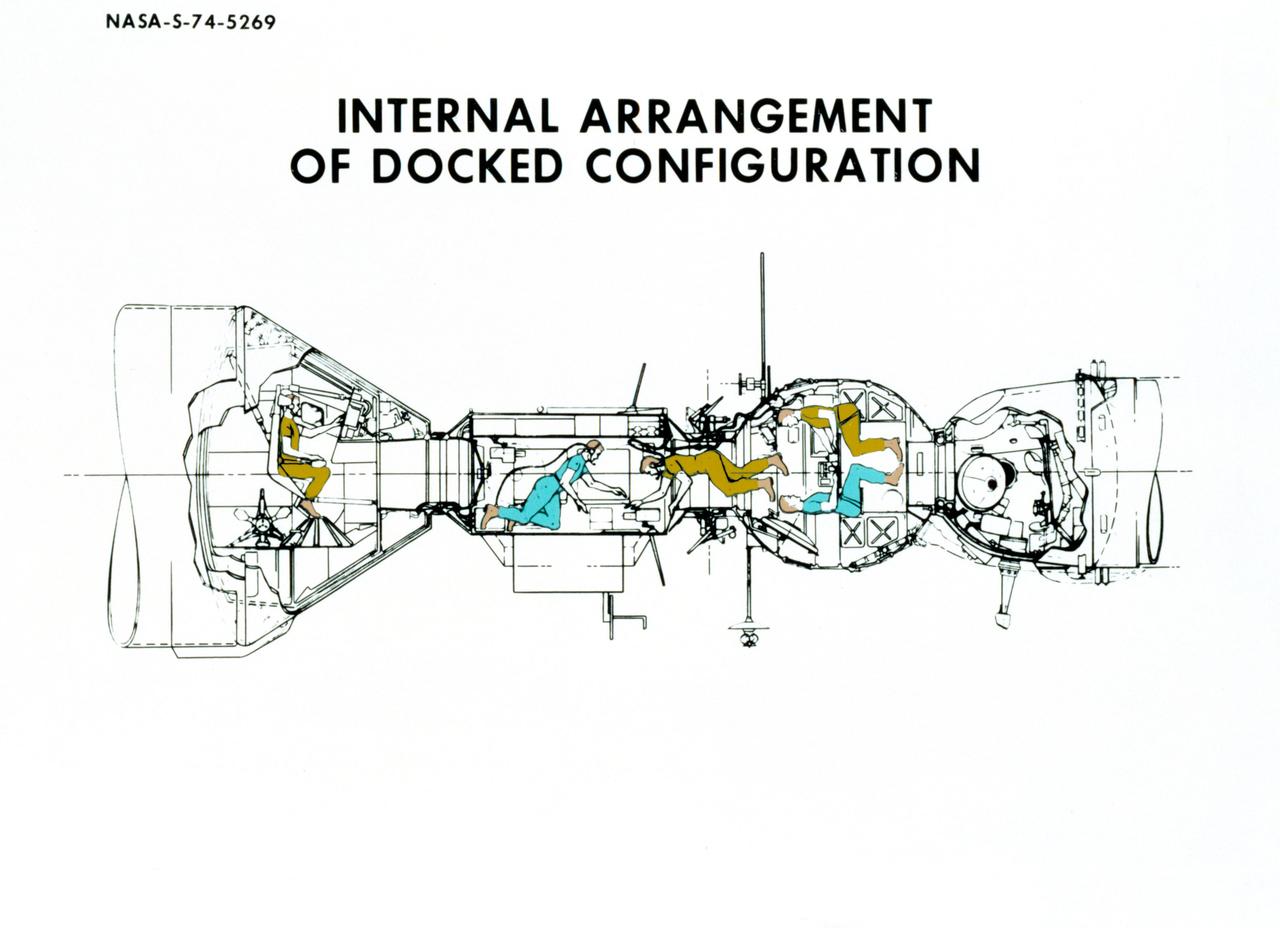
S74-05269 (December 1974) --- An artist?s drawing illustrating the internal arrangement of the Apollo and Soyuz spacecraft in Earth orbit in a docked configuration. The three American Apollo crewmen and the two Soviet Soyuz crewmen will transfer to each other?s spacecraft during the July 1975 ASTP mission. The four Apollo-Soyuz Test Project visible components are, left to right, the Apollo Command Module, the Docking Module, the Soyuz Orbital Module and the Soyuz Descent Vehicle.
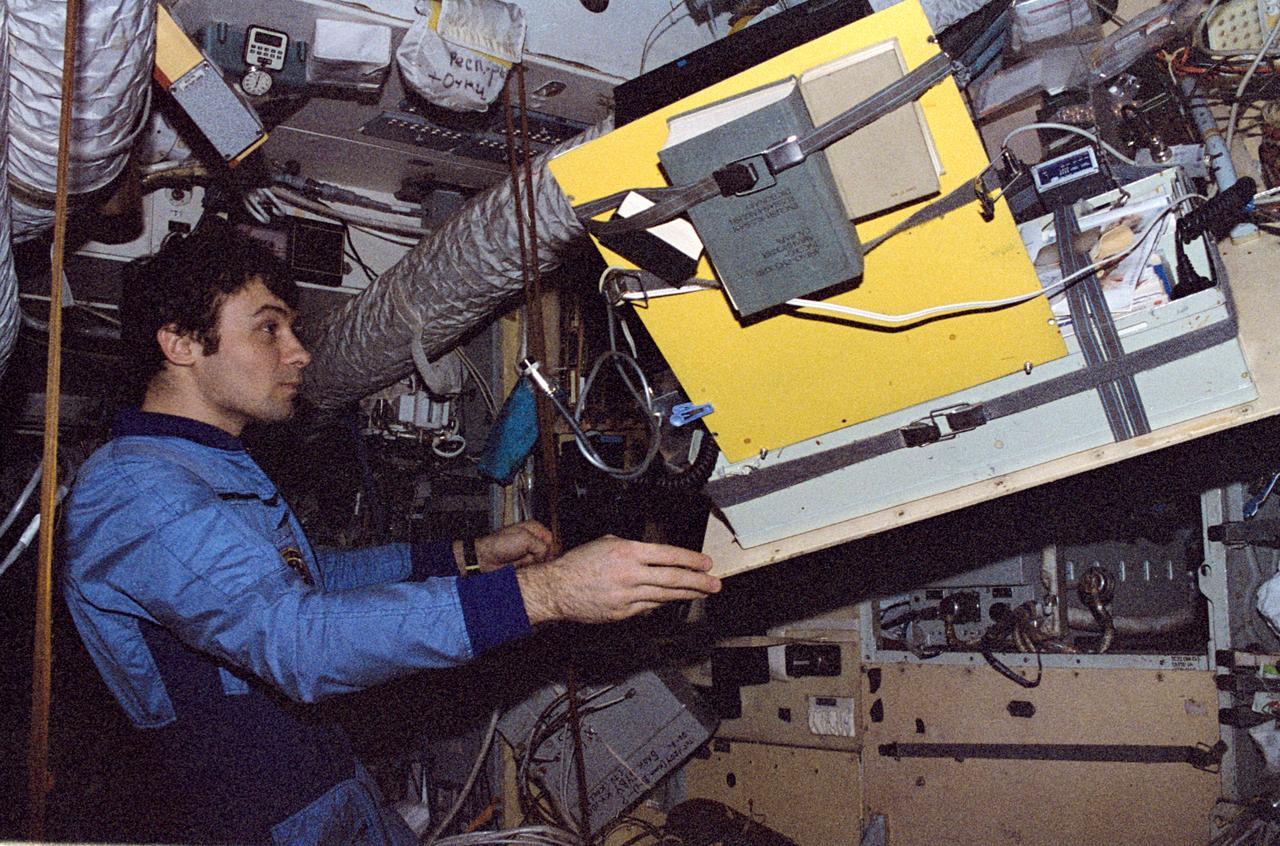
NM18-308-037 (28 June 1995) --- Onboard Mir, cosmonaut Vladimir N. Dezhurov prepares to change batteries at a power supply station as part of the preparation for the next day's scheduled docking with the Space Shuttle Atlantis. This visual was one of many shown by the Mir-18 crew at a press conference on July 18 in Houston.

Astronaut Neil Armstrong (left) was one of 14 astronauts, 8 NASA test pilots, and 2 McDonnell test pilots who took part in simulator studies. Armstrong was the first astronaut to participate (November 6, 1963). A.W. Vogeley described the simulator in his paper "Discussion of Existing and Planned Simulators For Space Research," "Many of the astronauts have flown this simulator in support of the Gemini studies and they, without exception, appreciated the realism of the visual scene. The simulator has also been used in the development of pilot techniques to handle certain jet malfunctions in order that aborts could be avoided. In these situations large attitude changes are sometimes necessary and the false motion cues that were generated due to earth gravity were somewhat objectionable; however, the pilots were readily able to overlook these false motion cues in favor of the visual realism." Roy F. Brissenden, noted in his paper "Initial Operations with Langley's Rendezvous Docking Facility," "The basic Gemini control studies developed the necessary techniques and demonstrated the ability of human pilots to perform final space docking with the specified Gemini-Agena systems using only visual references. ... Results... showed that trained astronauts can effect the docking with direct acceleration control and even with jet malfunctions as long as good visual conditions exist.... Probably more important than data results was the early confidence that the astronauts themselves gained in their ability to perform the maneuver in the ultimate flight mission." Francis B. Smith, noted in his paper "Simulators for Manned Space Research," "Some major areas of interest in these flights were fuel requirements, docking accuracies, the development of visual aids to assist alignment of the vehicles, and investigation of alternate control techniques with partial failure modes. However, the familiarization and confidence developed by the astronaut through flying and safely docking the simulator during these tests was one of the major contributions. For example, it was found that fuel used in docking from 200 feet typically dropped from about 20 pounds to 7 pounds after an astronaut had made a few training flights." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964; Roy F. Brissenden, "Initial Operations with Langley's Rendezvous Docking Facility," Langley Working Paper, LWP-21, 1964; Francis B. Smith, "Simulators for Manned Space Research," Paper presented at the 1966 IEEE International convention, March 21-25, 1966.

Astronaut John Young (above) was one of 14 astronauts, 8 NASA test pilots, and 2 McDonnell test pilots who took part in simulator studies. Young piloted the simulator on November 12, 1963 Arthur Vogeley wrote: "Many of the astronauts have flown this simulator in support of the Gemini studies and they, without exception, appreciated the realism of the visual scene. The simulator has also been used in the development of pilot techniques to handle certain jet malfunctions in order that aborts could be avoided. In these situations large attitude changes are sometimes necessary and the false motion cues that were generated due to earth gravity were somewhat objectionable; however, the pilots were readily able to overlook these false motion cues in favor of the visual realism." Roy F. Brissenden wrote: "The basic Gemini control studies developed the necessary techniques and demonstrated the ability of human pilots to perform final space docking with the specified Gemini-Agena systems using only visual references. ... Results... showed that trained astronauts can effect the docking with direct acceleration control and even with jet malfunctions as long as good visual conditions exist.... Probably more important than data results was the early confidence that the astronauts themselves gained in their ability to perform the maneuver in the ultimate flight mission." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964; Roy F. Brissenden, "Initial Operations with Langley's Rendezvous Docking Facility," Langley Working Paper, LWP-21, 1964.

Originally the Rendezvous was used by the astronauts preparing for Gemini missions. The Rendezvous Docking Simulator was then modified and used to develop docking techniques for the Apollo program. This picture shows a later configuration of the Apollo docking with the LEM target. A.W. Vogeley described the simulator as follows: The Rendezvous Docking Simulator and also the Lunar Landing Research Facility are both rather large moving-base simulators. It should be noted, however, that neither was built primarily because of its motion characteristics. The main reason they were built was to provide a realistic visual scene. A secondary reason was that they would provide correct angular motion cues (important in control of vehicle short-period motions) even though the linear acceleration cues would be incorrect. -- Published in A.W. Vogeley, Piloted Space-Flight Simulation at Langley Research Center, Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966.
![Multiple exposure of Gemini rendezvous docking simulator. Francis B. Smith wrote in his paper "Simulators for Manned Space Research," "The rendezvous and docking operation of the Gemini spacecraft with the Agena and of the Apollo Command Module with the Lunar Excursion Module have been the subject of simulator studies for several years. [This figure] illustrates the Gemini-Agena rendezvous docking simulator at Langley. The Gemini spacecraft was supported in a gimbal system by an overhead crane and gantry arrangement which provided 6 degrees of freedom - roll, pitch, yaw, and translation in any direction - all controllable by the astronaut in the spacecraft. Here again the controls fed into a computer which in turn provided an input to the servos driving the spacecraft so that it responded to control motions in a manner which accurately simulated the Gemini spacecraft." A.W. Vogeley further described the simulator in his paper "Discussion of Existing and Planned Simulators For Space Research," "Docking operations are considered to start when the pilot first can discern vehicle target size and aspect and terminate, of course, when soft contact is made. ... This facility enables simulation of the docking operation from a distance of 200 feet to actual contact with the target. A full-scale mock-up of the target vehicle is suspended near one end of the track. ... On [the Agena target] we have mounted the actual Agena docking mechanism and also various types of visual aids. We have been able to devise visual aids which have made it possible to accomplish nighttime docking with as much success as daytime docking." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; Francis B. Smith, "Simulators for Manned Space Research," Paper presented at the 1966 IEEE International convention, March 21-25, 1966; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964.](https://images-assets.nasa.gov/image/LRC-1963-B701_P-08973/LRC-1963-B701_P-08973~medium.jpg)
Multiple exposure of Gemini rendezvous docking simulator. Francis B. Smith wrote in his paper "Simulators for Manned Space Research," "The rendezvous and docking operation of the Gemini spacecraft with the Agena and of the Apollo Command Module with the Lunar Excursion Module have been the subject of simulator studies for several years. [This figure] illustrates the Gemini-Agena rendezvous docking simulator at Langley. The Gemini spacecraft was supported in a gimbal system by an overhead crane and gantry arrangement which provided 6 degrees of freedom - roll, pitch, yaw, and translation in any direction - all controllable by the astronaut in the spacecraft. Here again the controls fed into a computer which in turn provided an input to the servos driving the spacecraft so that it responded to control motions in a manner which accurately simulated the Gemini spacecraft." A.W. Vogeley further described the simulator in his paper "Discussion of Existing and Planned Simulators For Space Research," "Docking operations are considered to start when the pilot first can discern vehicle target size and aspect and terminate, of course, when soft contact is made. ... This facility enables simulation of the docking operation from a distance of 200 feet to actual contact with the target. A full-scale mock-up of the target vehicle is suspended near one end of the track. ... On [the Agena target] we have mounted the actual Agena docking mechanism and also various types of visual aids. We have been able to devise visual aids which have made it possible to accomplish nighttime docking with as much success as daytime docking." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; Francis B. Smith, "Simulators for Manned Space Research," Paper presented at the 1966 IEEE International convention, March 21-25, 1966; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964.

Walter (Wally) M. Schirra in Visual Docking Simulator From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers 1966 Winter Meeting, New York, NY, November 27-December 1, 1966. "This facility was [later known as the Visual-Optical Simulator. It presents to the pilot an out-the-window view of his target in correct 6 degrees of freedom motion. The scene is obtained by a television camera pick-up viewing a small-scale gimbaled model of the target. "For docking studies, the docking target picture was projected onto the surface of a 20-foot-diameter sphere and the pilot could, effectively, maneuver into contract. this facility was used in a comparison study with the Rendezvous Docking Simulator - one of the few comparison experiments in which conditions were carefully controlled and a reasonable sample of pilots used. All pilots preferred the more realistic RDS visual scene. The pilots generally liked the RDS angular motion cues although some objected to the false gravity cues that these motions introduced. Training time was shorter on the RDS, but final performance on both simulators was essentially equal. " "For station-keeping studies, since close approach is not required, the target was presented to the pilot through a virtual-image system which projects his view to infinity, providing a more realistic effect. In addition to the target, the system also projects a star and horizon background. "
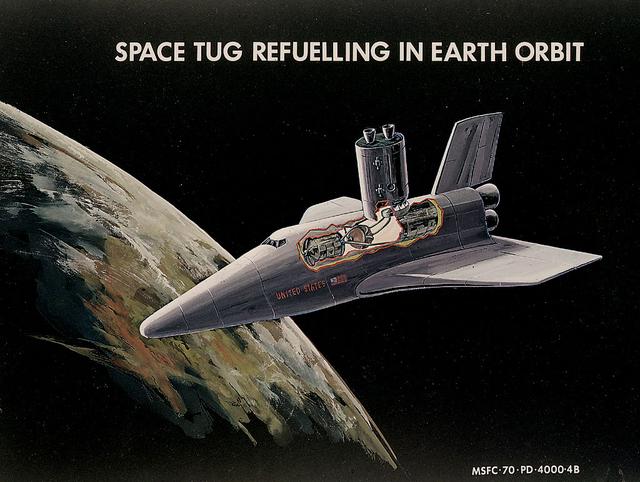
Managed by Marshall Space Flight Center, the Space Tug concept was intended to be a reusable multipurpose space vehicle designed to transport payloads to different orbital inclinations. Utilizing mission-specific combinations of its three primary modules (crew, propulsion, and cargo) and a variety of supplementary kits, the Space Tug would have been capable of numerous space applications. The Tug could dock with the Space Shuttle to receive propellants and cargo, as visualized in this 1970 artist's concept. The Space Tug program was cancelled and did not become a reality.
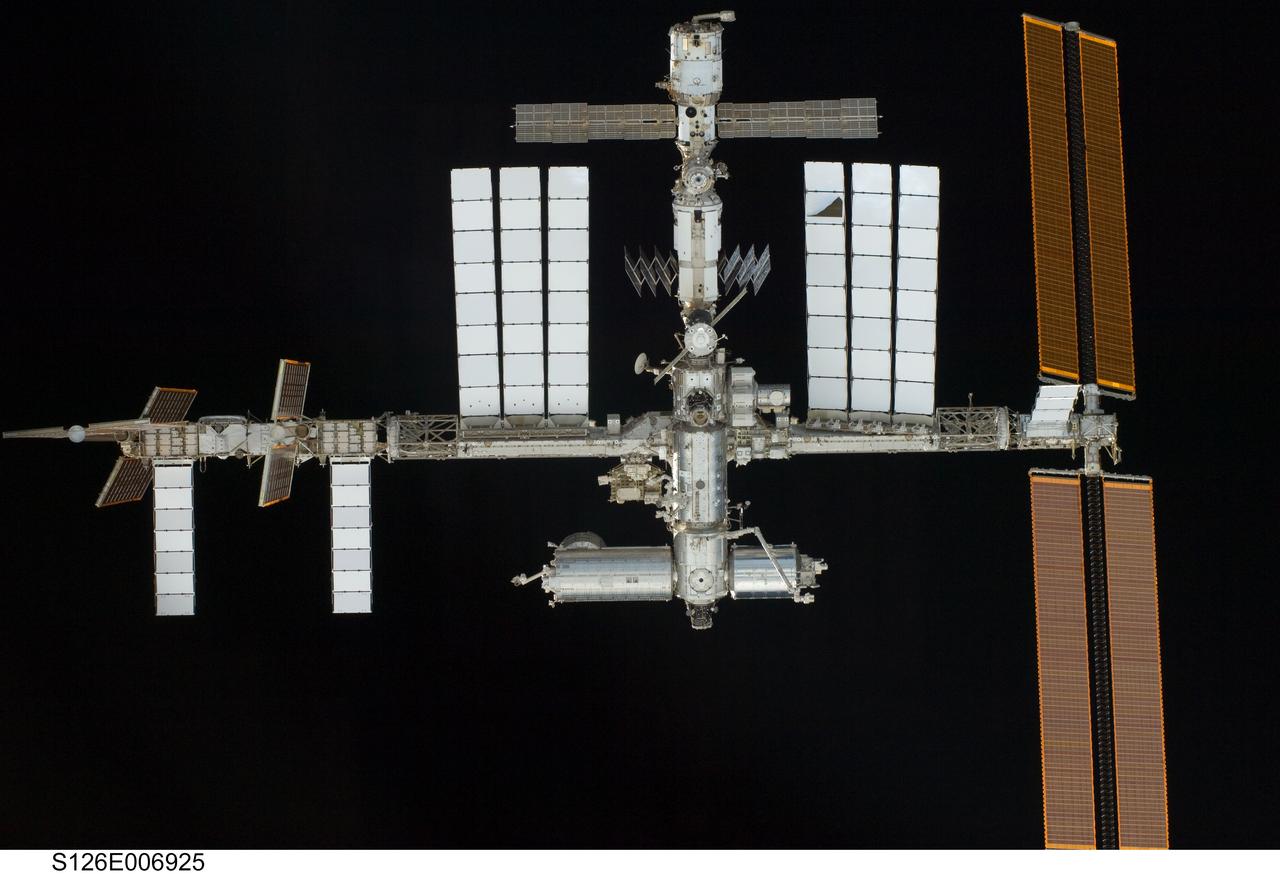
S126-E-006925 (16 Nov. 2008) --- As the Space Shuttle Endeavour and the International Space Station approached each other in Earth orbit prior to their Nov. 16 docking, STS-126 crewmembers took a few photos of the ever-growing orbital outpost. In this same timeframe, the crewmembers aboard the station were taking pictures of the shuttle as it performed a back flip for visual survey and a series of photographs.

S126-E-006923 (16 Nov. 2008) --- As the Space Shuttle Endeavour and the International Space Station approached each other in Earth orbit prior to their Nov. 16 docking, STS-126 crewmembers took a few photos of the ever-growing orbital outpost. In this same timeframe, the crewmembers aboard the station were taking pictures of the shuttle as it performed a back flip for visual survey and a series of photographs.
Originally the Rendezvous was used by the astronauts preparing for Gemini missions. The Rendezvous Docking Simulator was then modified and used to develop docking techniques for the Apollo program. The pilot is shown maneuvering the LEM into position for docking with a full-scale Apollo Command Module. From A.W. Vogeley, Piloted Space-Flight Simulation at Langley Research Center, Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966. The Rendezvous Docking Simulator and also the Lunar Landing Research Facility are both rather large moving-base simulators. It should be noted, however, that neither was built primarily because of its motion characteristics. The main reason they were built was to provide a realistic visual scene. A secondary reason was that they would provide correct angular motion cues (important in control of vehicle short-period motions) even though the linear acceleration cues would be incorrect. Apollo Rendezvous Docking Simulator: Langley s Rendezvous Docking Simulator was developed by NASA scientists to study the complex task of docking the Lunar Excursion Module with the Command Module in Lunar orbit.
Originally the Rendezvous was used by the astronauts preparing for Gemini missions. The Rendezvous Docking Simulator was then modified and used to develop docking techniques for the Apollo program. "The LEM pilot's compartment, with overhead window and the docking ring (idealized since the pilot cannot see it during the maneuvers), is shown docked with the full-scale Apollo Command Module." A.W. Vogeley described the simulator as follows: "The Rendezvous Docking Simulator and also the Lunar Landing Research Facility are both rather large moving-base simulators. It should be noted, however, that neither was built primarily because of its motion characteristics. The main reason they were built was to provide a realistic visual scene. A secondary reason was that they would provide correct angular motion cues (important in control of vehicle short-period motions) even though the linear acceleration cues would be incorrect." -- Published in A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966;

Originally the Rendezvous was used by the astronauts preparing for Gemini missions. The Rendezvous Docking Simulator was then modified and used to develop docking techniques for the Apollo program. "The LEM pilot's compartment, with overhead window and the docking ring (idealized since the pilot cannot see it during the maneuvers), is shown docked with the full-scale Apollo Command Module." A.W. Vogeley described the simulator as follows: "The Rendezvous Docking Simulator and also the Lunar Landing Research Facility are both rather large moving-base simulators. It should be noted, however, that neither was built primarily because of its motion characteristics. The main reason they were built was to provide a realistic visual scene. A secondary reason was that they would provide correct angular motion cues (important in control of vehicle short-period motions) even though the linear acceleration cues would be incorrect." -- Published in A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966;

ISS011-E-11023 (28 July 2005) --- View of the Space Shuttle Discovery's crew cabin and the Orbiter Docking System (ODS), photographed as part of the survey sequence performed by the Expedition 11 crew during the STS-114 R-Bar Pitch Maneuver on Flight Day 3. This picture was used by Steve M. Poulos, Jr. Manager, Space Shuttle Vehicle Engineering Office, as one of his visual aids in a July 28, 2005 press conference in the Teague Auditorium at the Johnson Space Center. Poulos pointed out a raised area of thermal blanket material just below a window on the commander's (port) side of the cabin.

Astronaut Alan Shepard (right) was one of 14 astronauts, 8 NASA test pilots, and 2 McDonnell test pilots who took part in simulator studies. Shepard flew the simulator on November 14, 1963. A.W. Vogeley wrote: "Many of the astronauts have flown this simulator in support of the Gemini studies and they, without exception, appreciated the realism of the visual scene. The simulator has also been used in the development of pilot techniques to handle certain jet malfunctions in order that aborts could be avoided. In these situations large attitude changes are sometimes necessary and the false motion cues that were generated due to earth gravity were somewhat objectionable; however, the pilots were readily able to overlook these false motion cues in favor of the visual realism." Roy F. Brissenden noted that: "The basic Gemini control studies developed the necessary techniques and demonstrated the ability of human pilots to perform final space docking with the specified Gemini-Agena systems using only visual references. ... Results... showed that trained astronauts can effect the docking with direct acceleration control and even with jet malfunctions as long as good visual conditions exist.... Probably more important than data results was the early confidence that the astronauts themselves gained in their ability to perform the maneuver in the ultimate flight mission." Shepard commented: "I had the feeling tonight - a couple of times - that I was actually doing the space mission instead of the simulation. As I said before, I think it is a very good simulation." Shepard also commented on piloting techniques. Most astronauts arrived at this same preferred technique: Shepard: "I believe I have developed the preferred technique for these conditions and the technique appeared to me to be best was to come in slightly above the target so that I was able to use the longitudinal marks on the body of the target as a reference, particularly for a lateral translation and, of course, I used the foreshortening effect for a vertical translation, and this appeared to give me the best results. By that I mean the least number of control motions and the lowest fuel usage and the best end techniques, or the best end conditions, I should say." Engineer: "When you started to run you didn't start thrusting immediately I don't believe. It looked like you started working on your attitudes, then started closing in." Shepard: "That is correct. I did that because I felt that I wanted to get the X-axis translation in the most effective vector and for minimum fuel usage that wouldn't introduce any other lateral or vertical offsets that did not already exist." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964; Roy F. Brissenden, "Initial Operations with Langley's Rendezvous Docking Facility," Langley Working Paper, LWP-21, 1964.

Astronaut Alan Shepard (right) was one of 14 astronauts, 8 NASA test pilots, and 2 McDonnell test pilots who took part in simulator studies. Shepard flew the simulator on November 14, 1963. A.W. Vogeley wrote: "Many of the astronauts have flown this simulator in support of the Gemini studies and they, without exception, appreciated the realism of the visual scene. The simulator has also been used in the development of pilot techniques to handle certain jet malfunctions in order that aborts could be avoided. In these situations large attitude changes are sometimes necessary and the false motion cues that were generated due to earth gravity were somewhat objectionable; however, the pilots were readily able to overlook these false motion cues in favor of the visual realism." Roy F. Brissenden noted that: "The basic Gemini control studies developed the necessary techniques and demonstrated the ability of human pilots to perform final space docking with the specified Gemini-Agena systems using only visual references. ... Results... showed that trained astronauts can effect the docking with direct acceleration control and even with jet malfunctions as long as good visual conditions exist.... Probably more important than data results was the early confidence that the astronauts themselves gained in their ability to perform the maneuver in the ultimate flight mission." Shepard commented: "I had the feeling tonight - a couple of times - that I was actually doing the space mission instead of the simulation. As I said before, I think it is a very good simulation." Shepard also commented on piloting techniques. Most astronauts arrived at this same preferred technique: Shepard: "I believe I have developed the preferred technique for these conditions and the technique appeared to me to be best was to come in slightly above the target so that I was able to use the longitudinal marks on the body of the target as a reference, particularly for a lateral translation and, of course, I used the foreshortening effect for a vertical translation, and this appeared to give me the best results. By that I mean the least number of control motions and the lowest fuel usage and the best end techniques, or the best end conditions, I should say." Engineer: "When you started to run you didn't start thrusting immediately I don't believe. It looked like you started working on your attitudes, then started closing in." Shepard: "That is correct. I did that because I felt that I wanted to get the X-axis translation in the most effective vector and for minimum fuel usage that wouldn't introduce any other lateral or vertical offsets that did not already exist." -- Published in Barton C. Hacker and James M. Grimwood, On the Shoulders of Titans: A History of Project Gemini, NASA SP-4203; A.W. Vogeley, "Discussion of Existing and Planned Simulators For Space Research," Paper presented at the Conference on the Role of Simulation in Space Technology, August 17-21, 1964; Roy F. Brissenden, "Initial Operations with Langley's Rendezvous Docking Facility," Langley Working Paper, LWP-21, 1964.

ISS030-E-005757 (22 Nov. 2011) --- This photograph, taken from the International Space Station flying approximately 220 miles above Earth, was captured by NASA astronaut Dan Burbank, Expedition 30 commander, as he visually followed the course of the Soyuz spacecraft carrying the Expedition 29 threesome of Mike Fossum, Satoshi Furukawa and Sergei Volkov toward their entry through the atmosphere. According to a Twitter message from Burbank, the Soyuz appears as a tiny streak near the exact center of the image. The orbital outpost was over a point near the southeastern Black Sea (bottom) looking generally northeastward over southern Russia/eastern Ukraine. A Russian Progress spacecraft, docked to the station, appears at the top of the frame.

CAPE CANAVERAL, Fla. -- A model of the Sensor Test for Orion Relnav Risk Mitigation, or STORRM, is displayed at NASA's Kennedy Space Center in Florida. Seen here, is the International Space Station docking target and STORMM sensor enclosure assembly. A flight test of STORRM will be performed on STS-134 on the last on-orbit day of the mission, when space shuttle Endeavour will fly a dedicated maneuver to simulate an Orion rendezvous trajectory. Throughout the maneuver, two Orion sensors will collect visual- and laser-based relative navigation data. This will provide an unprecedented in-flight test opportunity for America's next-generation exploration spacecraft. STS-134 also will deliver the Express Logistics Carrier-3, Alpha Magnetic Spectrometer-2 (AMS), a high-pressure gas tank and additional spare parts for the Dextre robotic helper to the space station. Endeavour was scheduled to launch at 3:47 p.m. on April 29, but that attempt was scrubbed for at least 72 hours while engineers assess an issue associated with the shuttle's Auxiliary Power Unit 1. STS-134 will be the final spaceflight for Endeavour. For more information visit, www.nasa.gov_mission_pages_shuttle_shuttlemissions_sts134_index.html. Photo credit: NASA_Jack Pfaller

KENNEDY SPACE CENTER, FLA. -- In the Orbiter Processing Facility Bay 1, STS-88 Pilot Frederick W. Sturckow makes a visual inspection of windows on the Space Shuttle orbiter Endeavour. The STS-88 crew members are participating in a Crew Equipment Interface Test (CEIT), familiarizing themselves with the orbiter's midbody and crew compartments. Targeted for launch on Dec. 3, 1998, STS-88 will be the first Space Shuttle launch for assembly of the International Space Station (ISS). The primary payload is the Unity connecting module which will be mated to the Russian-built Zarya control module, expected to be already on orbit after a November launch from Russia. The first major U.S.-built component of ISS, Unity will serve as a connecting passageway to living and working areas of the space station. Unity has two attached pressurized mating adapters (PMAs) and one stowage rack installed inside. PMA-1 provides the permanent connection point between Unity and Zarya; PMA-2 will serve as a Space Shuttle docking port. Zarya is a self-supporting active vehicle, providing propulsive control capability and power during the early assembly stages. It also has fuel storage capability

KENNEDY SPACE CENTER, FLA. - STS-118 Commander Scott Kelly is satisfied with his training session in the shuttle training aircraft, or STA, at the Shuttle Landing Facility, Kennedy Space Center's airstrip. He and STS-118 Pilot Charlie Hobaugh were at the facility to practice landings for their upcoming mission. The STA is a Grumman American Aviation-built Gulf Stream II jet that was modified to simulate an orbiter's cockpit, motion and visual cues, and handling qualities. In flight, the STA duplicates the orbiter's atmospheric descent trajectory from approximately 35,000 feet altitude to landing on a runway. Endeavour's STS-118 mission is the 22nd shuttle flight to the International Space Station. It will continue space station construction by delivering a third starboard truss segment, S5. Other payloads include the SPACEHAB module, making its last voyage, and the external stowage platform 3 with a control moment gyroscope on it. The flight will include at least three spacewalks. The crew will also debut a new system that enables docked shuttles to draw electrical power from the station to extend visits to the outpost. Launch is set for Aug. 8 at 6:36 p.m. EDT. NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. - STS-118 Pilot Charlie Hobaugh is satisfied with his training session in the shuttle training aircraft, or STA, at the Shuttle Landing Facility, Kennedy Space Center's airstrip. He and STS-118 Commander Scott Kelly were at the facility to practice landings for their upcoming mission. The STA is a Grumman American Aviation-built Gulf Stream II jet that was modified to simulate an orbiter's cockpit, motion and visual cues, and handling qualities. In flight, the STA duplicates the orbiter's atmospheric descent trajectory from approximately 35,000 feet altitude to landing on a runway. Endeavour's STS-118 mission is the 22nd shuttle flight to the International Space Station. It will continue space station construction by delivering a third starboard truss segment, S5. Other payloads include the SPACEHAB module, making its last voyage, and the external stowage platform 3 with a control moment gyroscope on it. The flight will include at least three spacewalks. The crew will also debut a new system that enables docked shuttles to draw electrical power from the station to extend visits to the outpost. Launch is set for Aug. 8 at 6:36 p.m. EDT. NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. -- In the Orbiter Processing Facility Bay 1, STS-88 Commander Robert D. Cabana makes a visual inspection of the windows on Space Shuttle orbiter Endeavour. The STS-88 crew members are participating in a Crew Equipment Interface Test (CEIT), familiarizing themselves with the orbiter's midbody and crew compartments. Targeted for liftoff on Dec. 3, 1998, STS-88 will be the first Space Shuttle launch for assembly of the International Space Station (ISS). The primary payload is the Unity connecting module which will be mated to the Russian-built Zarya control module, expected to be already on orbit after a November launch from Russia. The first major U.S.-built component of ISS, Unity will serve as a connecting passageway to living and working areas of the space station. Unity has two attached pressurized mating adapters (PMAs) and one stowage rack installed inside. PMA-1 provides the permanent connection point between Unity and Zarya; PMA-2 will serve as a Space Shuttle docking port. Zarya is a self-supporting active vehicle, providing propulsive control capability and power during the early assembly stages. It also has fuel storage capability

KENNEDY SPACE CENTER, FLA. - STS-118 Pilot Charlie Hobaugh disembarks from the shuttle training aircraft, or STA, at the Shuttle Landing Facility, Kennedy Space Center's airstrip. He and STS-118 Commander Scott Kelly were at the facility to practice landings for their upcoming mission. The STA is a Grumman American Aviation-built Gulf Stream II jet that was modified to simulate an orbiter's cockpit, motion and visual cues, and handling qualities. In flight, the STA duplicates the orbiter's atmospheric descent trajectory from approximately 35,000 feet altitude to landing on a runway. Endeavour's STS-118 mission is the 22nd shuttle flight to the International Space Station. It will continue space station construction by delivering a third starboard truss segment, S5. Other payloads include the SPACEHAB module, making its last voyage, and the external stowage platform 3 with a control moment gyroscope on it. The flight will include at least three spacewalks. The crew will also debut a new system that enables docked shuttles to draw electrical power from the station to extend visits to the outpost. Launch is set for Aug. 8 at 6:36 p.m. EDT. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. - STS-118 Commander Scott Kelly disembarks from the shuttle training aircraft, or STA, at the Shuttle Landing Facility, Kennedy Space Center's airstrip. He and STS-118 Pilot Charlie Hobaugh were at the facility to practice landings for their upcoming mission. The STA is a Grumman American Aviation-built Gulf Stream II jet that was modified to simulate an orbiter's cockpit, motion and visual cues, and handling qualities. In flight, the STA duplicates the orbiter's atmospheric descent trajectory from approximately 35,000 feet altitude to landing on a runway. Endeavour's STS-118 mission is the 22nd shuttle flight to the International Space Station. It will continue space station construction by delivering a third starboard truss segment, S5. Other payloads include the SPACEHAB module, making its last voyage, and the external stowage platform 3 with a control moment gyroscope on it. The flight will include at least three spacewalks. The crew will also debut a new system that enables docked shuttles to draw electrical power from the station to extend visits to the outpost. Launch is set for Aug. 8 at 6:36 p.m. EDT. NASA/Kim Shiflett
![Test subject wearing jet-shoe apparatus and resting in sling support. The cables are not attached. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966. "As mentioned previously, Langley is conducting in-house and contract studies of extra-vehicular activities wherein zero gravity is simulated by the water-immersion technique. ... Water immersion is a very useful technique where motions are slow. When more rapid motion is required, as in studying one-man propulsion systems, other approaches are required. For these studies Langley has been using the RDS [Rendezvous Docking Simulator] in a manner similar to the LLRF [Lunar Landing Research Facility] technique. The test subjects are suspended in a sling support from a single RDS cable. As they translate about, the RDS tracks them, keeping the cable vertical. The test subjects operate in an effectively zero g environment in the horizontal plane. Tracking was originally done visually using closed-circuit TV, but recently a fast-response servo system using cable angle sensors has provided better operation. Some results of tests where subjects moved about merely by jumping and also where propulsion in the form of simple "jet-shoes" was provided are given in reference 20. Both methods, within limits, appear feasible. Full six-degree-of-freedom equipment for studies of more sophisticated one-man propulsion systems is now being procured. Called OMPRA (One-Man Propulsion Research Apparatus), the device will provide a gimbal system for rotational freedom, a quick response vertical servo for this translational freedom that is not now feasible with the RDS, and a versatile maneuvering unit."](https://images-assets.nasa.gov/image/LRC-1967-B701_P-01373/LRC-1967-B701_P-01373~medium.jpg)
Test subject wearing jet-shoe apparatus and resting in sling support. The cables are not attached. From A.W. Vogeley, "Piloted Space-Flight Simulation at Langley Research Center," Paper presented at the American Society of Mechanical Engineers, 1966 Winter Meeting, New York, NY, November 27 - December 1, 1966. "As mentioned previously, Langley is conducting in-house and contract studies of extra-vehicular activities wherein zero gravity is simulated by the water-immersion technique. ... Water immersion is a very useful technique where motions are slow. When more rapid motion is required, as in studying one-man propulsion systems, other approaches are required. For these studies Langley has been using the RDS [Rendezvous Docking Simulator] in a manner similar to the LLRF [Lunar Landing Research Facility] technique. The test subjects are suspended in a sling support from a single RDS cable. As they translate about, the RDS tracks them, keeping the cable vertical. The test subjects operate in an effectively zero g environment in the horizontal plane. Tracking was originally done visually using closed-circuit TV, but recently a fast-response servo system using cable angle sensors has provided better operation. Some results of tests where subjects moved about merely by jumping and also where propulsion in the form of simple "jet-shoes" was provided are given in reference 20. Both methods, within limits, appear feasible. Full six-degree-of-freedom equipment for studies of more sophisticated one-man propulsion systems is now being procured. Called OMPRA (One-Man Propulsion Research Apparatus), the device will provide a gimbal system for rotational freedom, a quick response vertical servo for this translational freedom that is not now feasible with the RDS, and a versatile maneuvering unit."
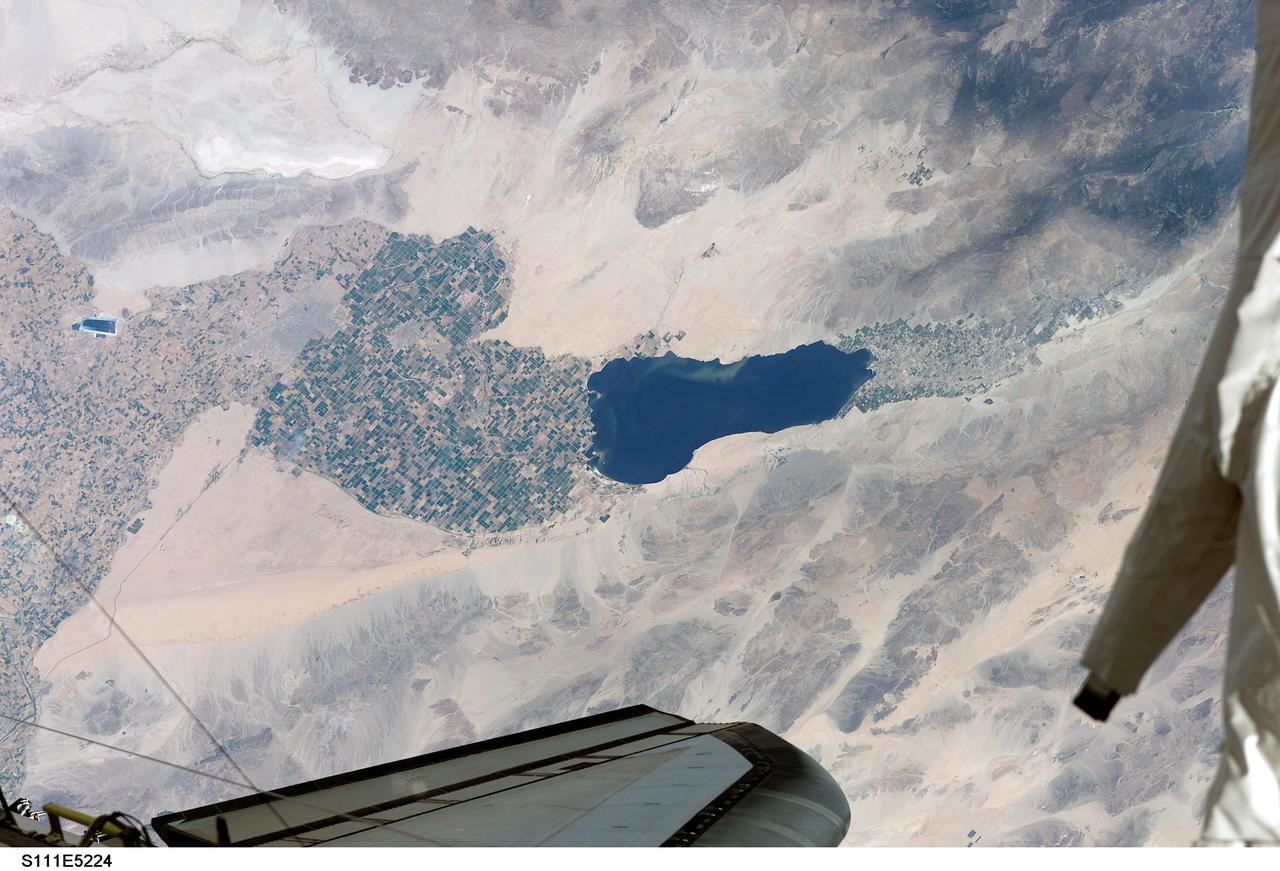
STS111-E-5224 (12 June 2002) --- Southern California’s Salton Sea is routinely a prominent visual for astronauts passing overhead on the shuttle or International Space Station (ISS). This large lake, photographed from the station while docked to the Space Shuttle Endeavour by one of the STS-111 crew members, supports the rich agricultural fields of the Imperial, Coachella and Mexicali Valleys in the California and Mexico desert. According to geologists, the Salton Sea formed by accident in 1905 when an irrigation canal ruptured, allowing the Colorado River to flood the Salton Basin. Today the Sea performs an important function as the sink for agricultural runoff. Water levels are maintained by the runoff from the surrounding agricultural valleys. The Salton Sea salinity is high -- nearly 1/4 saltier than ocean water --but it remains an important stopover point for migratory water birds, including several endangered species. Scientists also noted that the region experiences several environmental problems. The recent increased demands for the limited Colorado River water, the scientists point out, threatens the amount of water allowed to flow into the Salton Sea, and increased salinity with decreased water levels could trigger several regional environmental crises. The agricultural flow into the Sea includes nutrients and agricultural by-products, increasing the productivity and likelihood of algae blooms. This image shows either a bloom, or suspended sediment (usually highly organic) in the water that has been stirred up by winds.