Autonomous Perception Vision project - Intelligent Systems - head
Autonomous Perception Vision project - Intelligent Systems - Machine Vision, Fusing Photonics and A.I. - Fiber-Optic Probe for Laser Velocimetry (Mars)
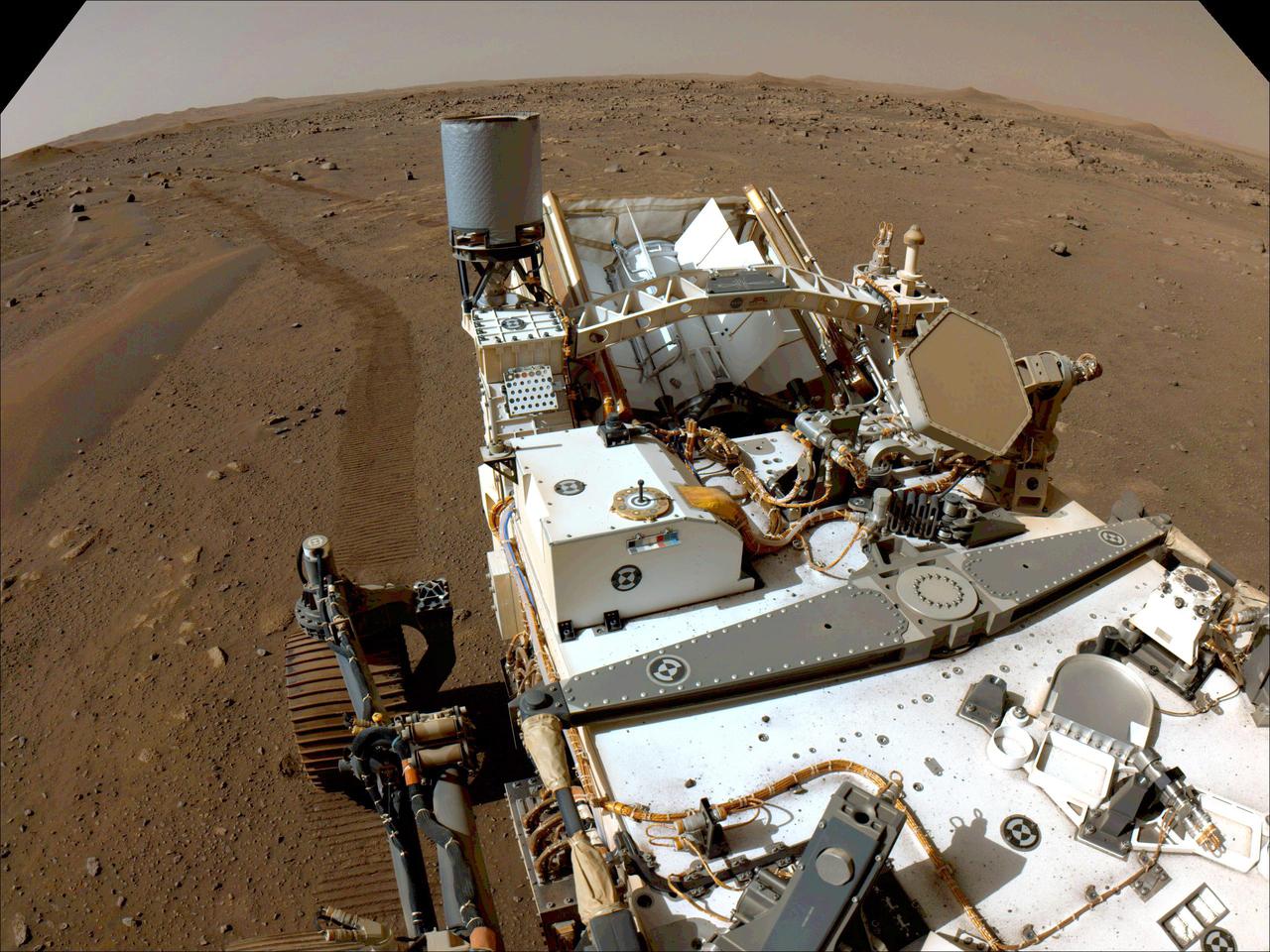
NASA's Perseverance Mars rover looks back toward its tracks on July 1, 2021 (the 130th sol, or Martian day, of its mission), after driving autonomously 358 feet (109 meters) – its longest autonomous drive to date. Taken by one of the rover's Navigation Cameras, the image has been processed to enhance the contrast. Perseverance has been exploring the floor of Jezero Crater since it landed on Feb. 18, 2021. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. https://photojournal.jpl.nasa.gov/catalog/PIA24741
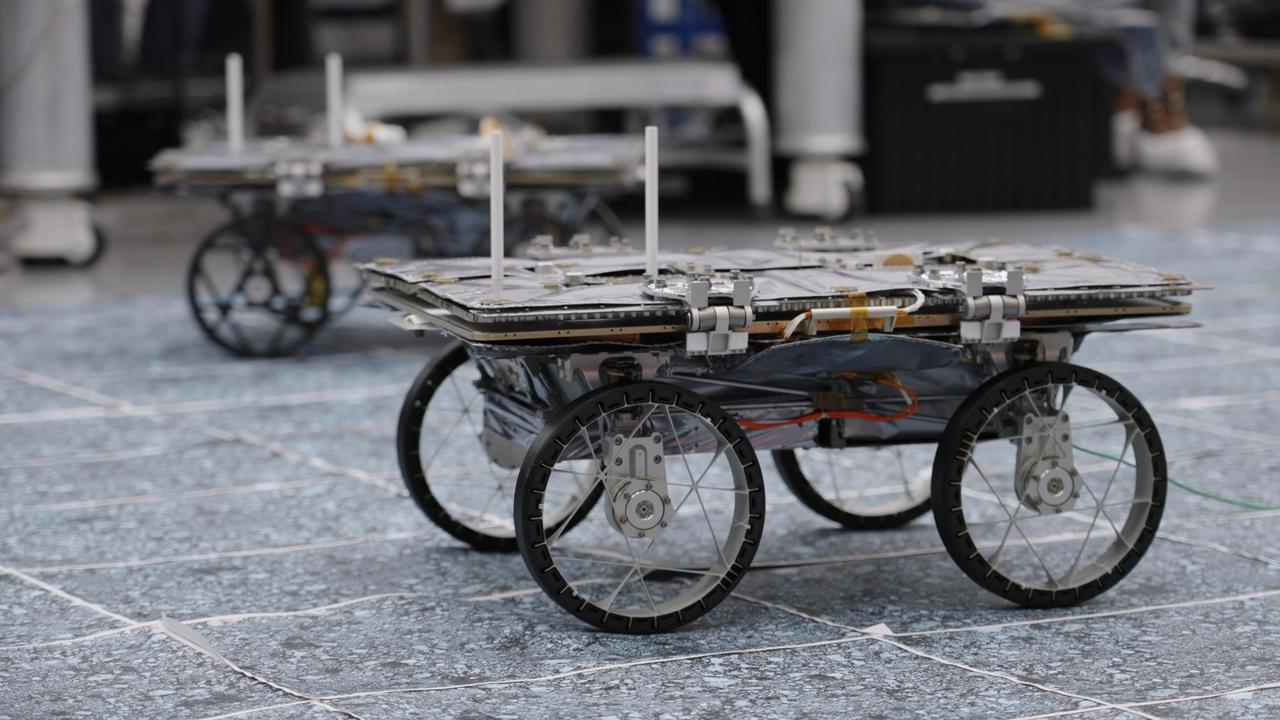
One of three small rovers bound for the Moon took an autonomous test drive in a clean room at NASA's Jet Propulsion Laboratory in Southern California in December 2023. Along with a base station that will be mounted on a lunar lander, the three rovers make up the agency's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. This video was taken during a test of the rovers' ability to drive together as a team without direct commands from engineers. If the CADRE tech demo succeeds on the lunar surface, future missions could include teams of robots spreading out to take scientific measurements from different locations simultaneously, potentially in support of astronauts. In this test, the rover's solar panels were closed, and black plastic covers protected the ultralight aluminum wheels to prevent their grousers from catching on the clean-room floor. Video available at https://photojournal.jpl.nasa.gov/catalog/PIA26297

Engineers prepare three small Moon-bound rovers for a drive test in a clean room at the agency's Jet Propulsion Laboratory in Southern California in December 2023. Along with a base station that will be mounted on a lunar lander, the rovers make up the CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration. This image was taken during a test of the rovers' ability to drive together as a team autonomously, without explicit commands from engineers. If the project succeeds, future missions could include teams of robots spreading out to take simultaneous, distributed scientific measurements, potentially in support of astronauts. In this test, the rovers had their solar panels closed, and they wore protective black plastic covers over their ultralight aluminum wheels to prevent the wheels' grousers from catching on the clean room floor. https://photojournal.jpl.nasa.gov/catalog/PIA26164
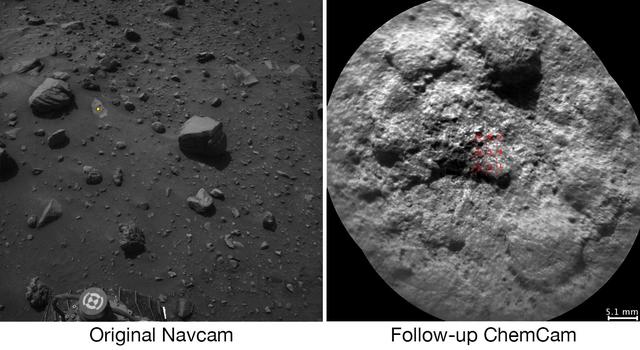
NASA's Curiosity Mars rover autonomously selects some of the targets for the laser and telescopic camera of the rover's Chemistry and Camera (ChemCam) instrument. For example, on-board software analyzed the image on the left, chose the target highlighted with the yellow dot, and pointed ChemCam to acquire laser analysis and the image on the right. Most ChemCam targets are still selected by scientists discussing rocks or soil seen in images the rover has sent to Earth, but the autonomous targeting provides an added capability. It can offer a head start on acquiring composition information at a location just reached by a drive. The software for target selection and instrument pointing is called AEGIS, for Autonomous Exploration for Gathering Increased Science. The image on the left was taken by the left eye of Curiosity's stereo Navigation Camera (Navcam) a few minutes after the rover completed a drive of about 43 feet (13 meters) on July 14, 2016, during the 1,400th Martian day, or sol, of the rover's work on Mars. Using AEGIS for target selection and pointing based on the Navcam imagery, Curiosity's ChemCam zapped a grid of nine points on a rock chosen for meeting criteria set by the science team. In this run, parameters were set to find bright-toned outcrop rock rather than darker rocks, which in this area tend to be loose on the surface. Within less than 30 minutes after the Navcam image was taken, ChemCam had used its laser on all nine points and had taken before-and-after images of the target area with its remote micro-imager (RMI) camera. The image at right combines those two RMI exposures. The nine laser targets are marked in red at the center. On the Navcam image at left, the yellow dot identifies the selected target area, which is about 2.2 inches (5.6 centimeters) in diameter. An unannotated version of this Sol 1400 Navcam image is available. ChemCam records spectra of glowing plasma generated when the laser hits a target point. These spectra provide information about the chemical elements present in the target. The light-toned patch of bedrock identified by AEGIS on Sol 1400 appears, geochemically, to belong to the "Stimson" sandstone unit of lower Mount Sharp. In mid-2016, Curiosity typically uses AEGIS for selecting a ChemCam target more than once per week. http://photojournal.jpl.nasa.gov/catalog/PIA20762
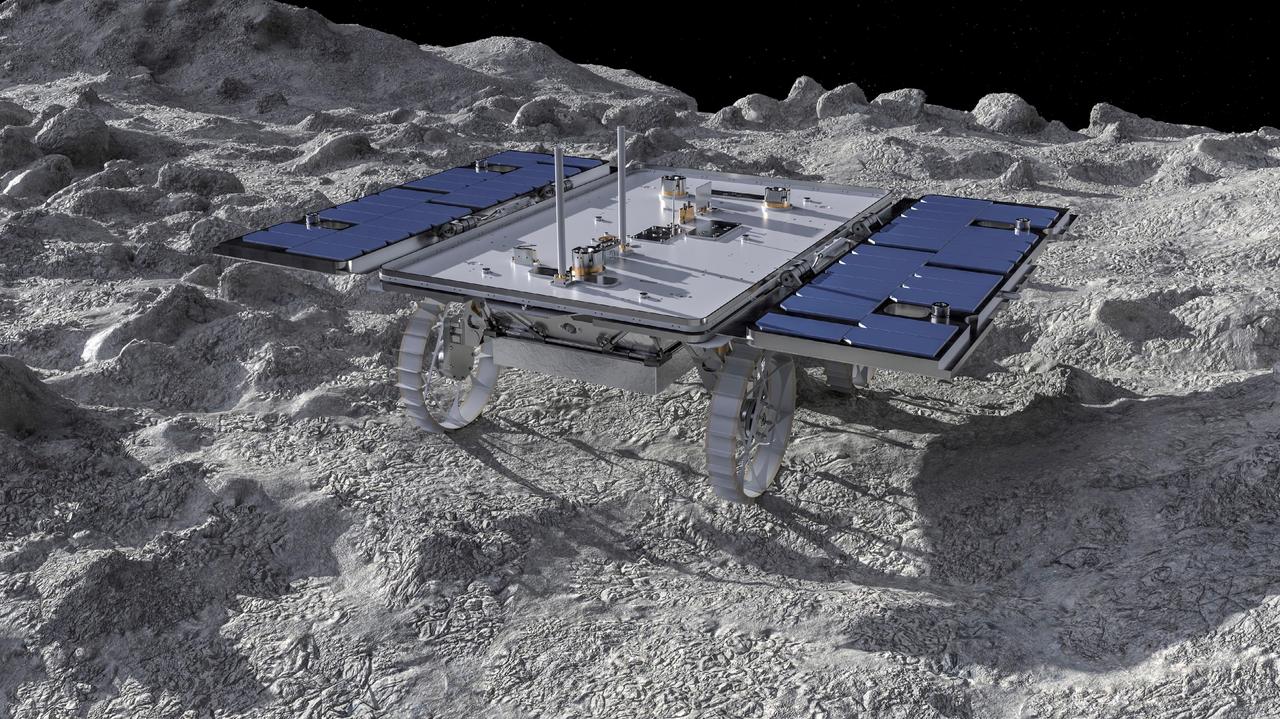
This artist's concept depicts a small rover – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration headed for the Moon – on the lunar surface. Motiv Space Systems in Pasadena, California, created the rendering and is collaborating with NASA's Jet Propulsion Laboratory on critical rover and mobility functions. Slated to arrive aboard a lunar lander in 2024 under NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Motiv contributed subsystems and hardware elements for three of four CADRE systems, including designing and building the mobility system and rover chassis, the base station, the rover deployers, and the motor controller boards. The company also procured and tested the actuators with the flight motor controller boards. https://photojournal.jpl.nasa.gov/catalog/PIA26161

This video from July 1, 2021 (the 130th sol, or Martian day, of its mission), shows scenes from the longest autonomous drive yet for NASA's Perseverance Mars rover, which landed on Feb. 18, 2021. At the beginning of the traverse on Sol 130, the rover's engineers manually drove past NASA's Ingenuity Mars Helicopter. Then the rover began driving autonomously, avoiding hazards and traveling 358 feet (109 meters) on its own. One of the rover's Navigation Cameras took the images about once every 16 feet (5 meters). They were processed to enhance the contrast. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA24743

Matt Johnson, CAPSTONE lead systems engineer, left, and Dylan Schmidt, CAPSTONE assembly integration and test lead, right, with the CAPSTONE spacecraft stowed in its dispenser at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.
Matt Johnson, CAPSTONE lead systems engineer, bottom, Dustin Holta, launch engineer, right, and Rebecca Rogers, systems engineer, background, with the CAPSTONE spacecraft stowed in its dispenser at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.
Rebecca Rogers, systems engineer, left, and Dustin Holta, launch engineer, right, mount a cover plate to the CAPSTONE spacecraft dispenser with the spacecraft stowed inside at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.
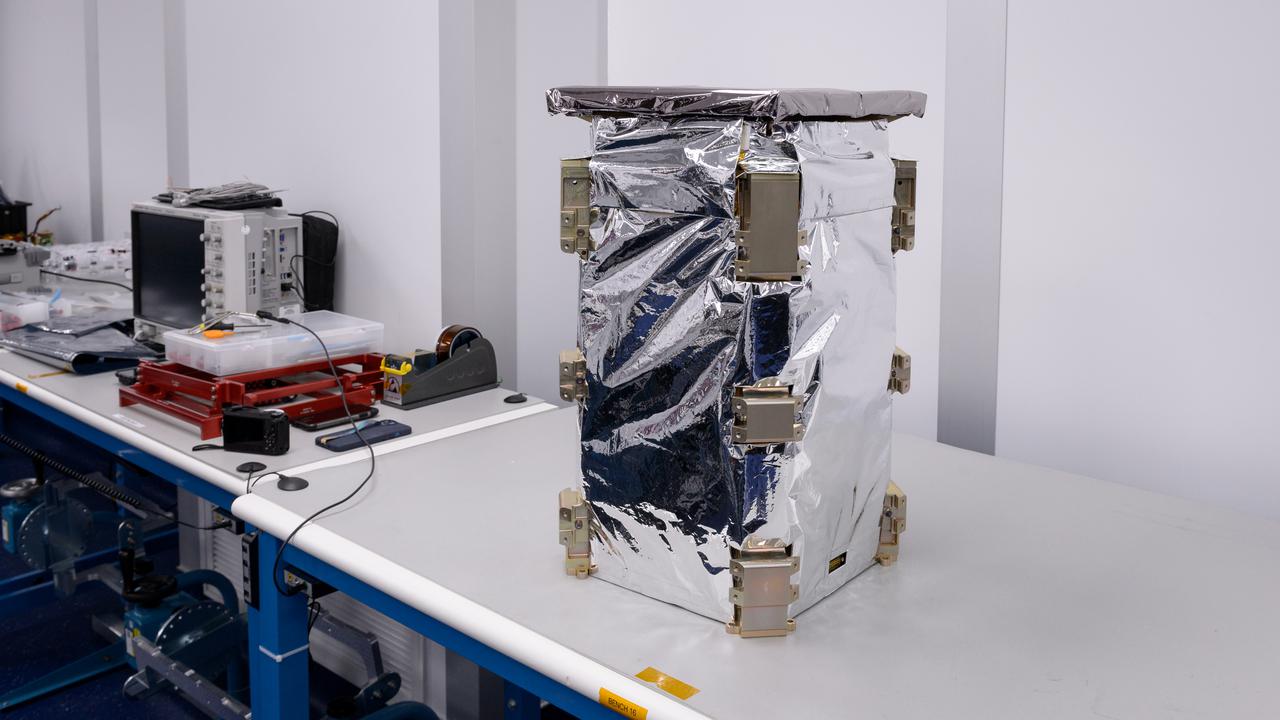
The CAPSTONE spacecraft dispenser in a thermal blanket with the spacecraft stowed inside at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.

Rebecca Rogers, systems engineer, center, Lachlan Moore, systems integration engineer, right, and Dylan Schmidt, CAPSTONE assembly integration and test lead, background, perform a solar panel string voltage test of the CAPSTONE spacecraft at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.

Dylan Schmidt, CAPSTONE assembly integration and test lead, installs solar panels onto the CAPSTONE spacecraft at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.

Dylan Schmidt, CAPSTONE assembly integration and test lead, right, and Rebecca Rogers, systems engineer, left, take dimension measurements of the CAPSTONE spacecraft at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.

Dustin Holta, launch engineer, left, and Rebecca Rogers, systems engineer, right, wrap the CAPSTONE spacecraft dispenser in a thermal blanket with the spacecraft stowed inside at Tyvak Nano-Satellite Systems, Inc., in Irvine, California.

A development rover that is part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drives over a rock during its first autonomous drive around the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in June 2023. Under a canopy behind the rover are, from left, graduate student intern Natalie Deo and CADRE verification and validation lead Sawyer Brooks of JPL. The CADRE team successfully tested a new wheel design, surface navigation software, and mobility capabilities, among other aspects of the project. The rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. Slated to arrive at the Moon in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA25667

A development model rover that is part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration took its first autonomous drive around the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in June 2023. The CADRE team tested a new wheel design, surface navigation software, and mobility capabilities, among other aspects of the project. Engineer Kristopher Sherrill is shown recording video of the test. The rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. Slated to arrive at the Moon in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA25665

iss052e016190 (July 18, 2017) --- Astronaut Peggy Whitson is photographed sitting in front of the Cupola windows during the final Crew Autonomous Scheduling Test (CAST) session. The CAST investigation analyzes whether crews can develop plans in a reasonable period of time with appropriate input, whether proximity of planners to the planned operations increases efficiency, and if crew members are more satisfied when given a role in plan development.

iss052e016179 (7/18/2017) --- NASA astronaut Peggy Whitson is photographed sitting in front of the Cupola windows during the final Crew Autonomous Scheduling Test (CAST) session. The CAST investigation analyzes whether crews can develop plans in a reasonable period of time with appropriate input, whether proximity of planners to the planned operations increases efficiency, and if crew members are more satisfied when given a role in plan development

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18 jets used in the Autonomous Formation Flight (AFF) program

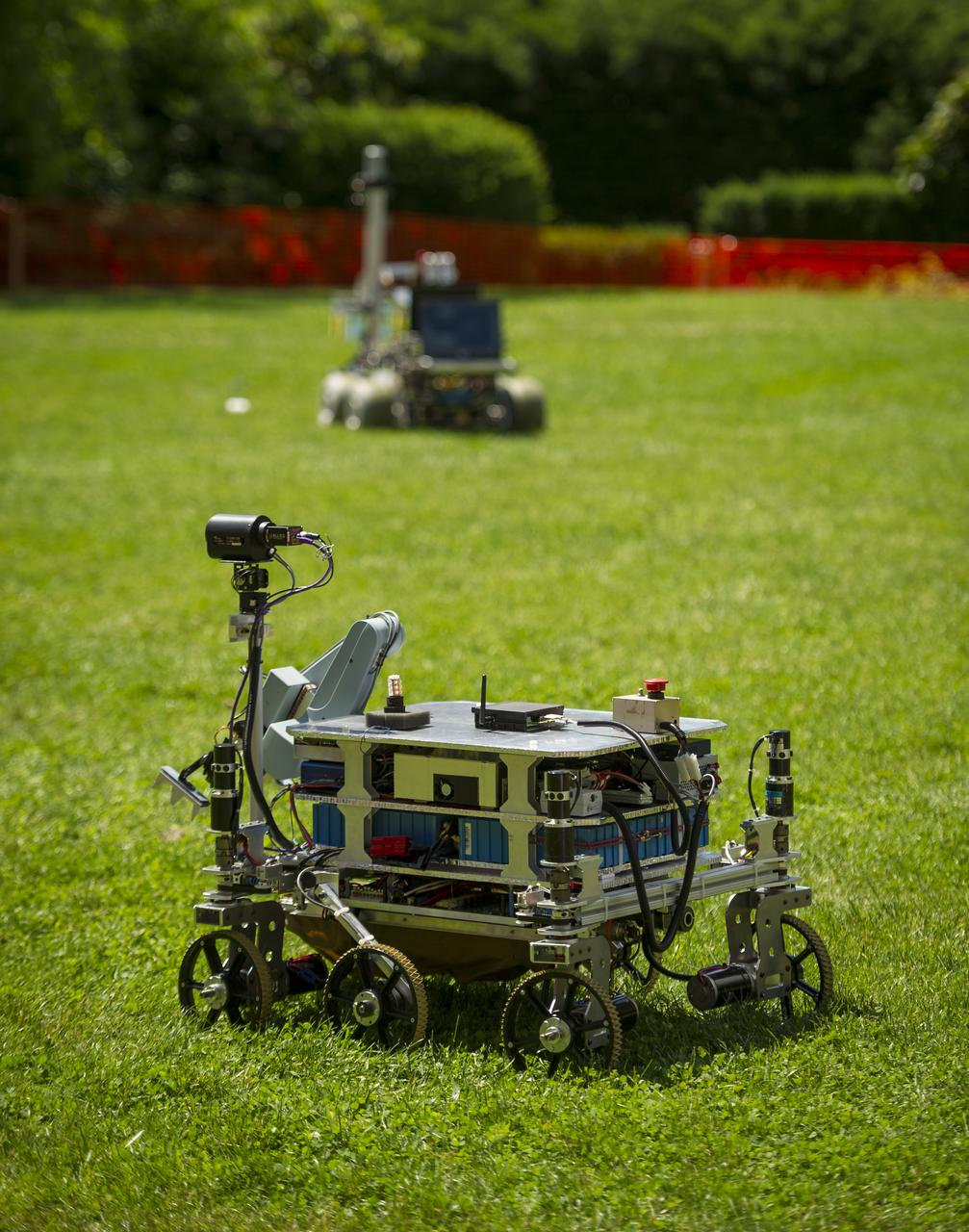
Senior executives from the Renault-Nissan Alliance visited Ames meet with Ames management. Here they are gathered for a Autonomous Drive demo presentation by Terry Fong, Ames Research Center.

Senior executives from the Renault-Nissan Alliance, including Carlos Ghosn, chairman and CEO of Nissan, and Jose Munoz, chairman of Nissan North America, visited Ames for meetings and a showcase of the technical partnership between NASA and Nissan North America. The partnership allows researchers to develop and test autonomy algorithms, concepts, and integrated prototypes for a variety of vehicular transport applications – from rovers to self-driving cars. After briefings, a company of including Eugene Tu, Ames Center Director andLiam Pedersen, Nissan on right Carlos Ghosn, CE, Nissan on left climb into in the autonomous vehicle to observed testing of Nissan’s all-electric LEAF as it performed safe autonomous drives across the center.
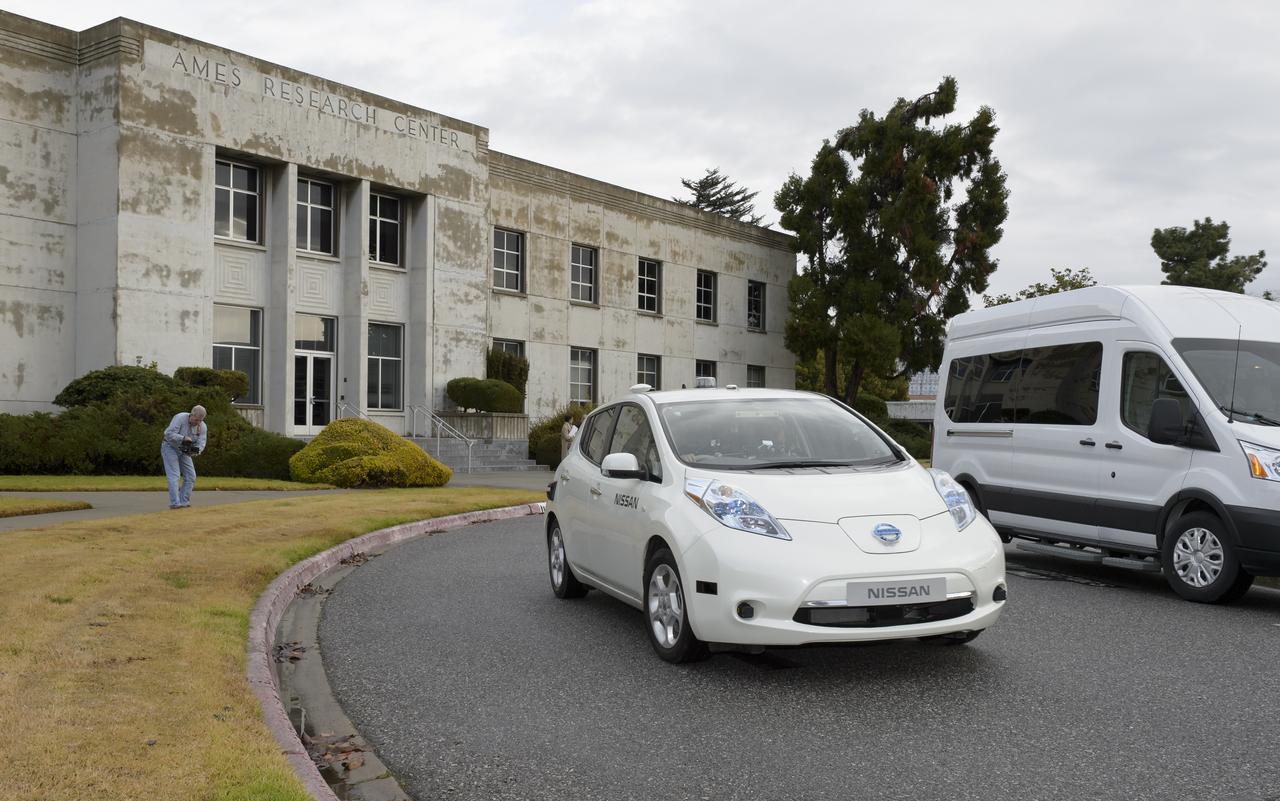
Senior executives from the Renault-Nissan Alliance, including Carlos Ghosn, chairman and CEO of Nissan, and Jose Munoz, chairman of Nissan North America, visited Ames for meetings and a showcase of the technical partnership between NASA and Nissan North America. The partnership allows researchers to develop and test autonomy algorithms, concepts, and integrated prototypes for a variety of vehicular transport applications – from rovers to self-driving cars. After briefings, a group take a ride in the autonomous vehicle to observed testing of Nissan’s all-electric LEAF as it performed safe autonomous drives across the center.
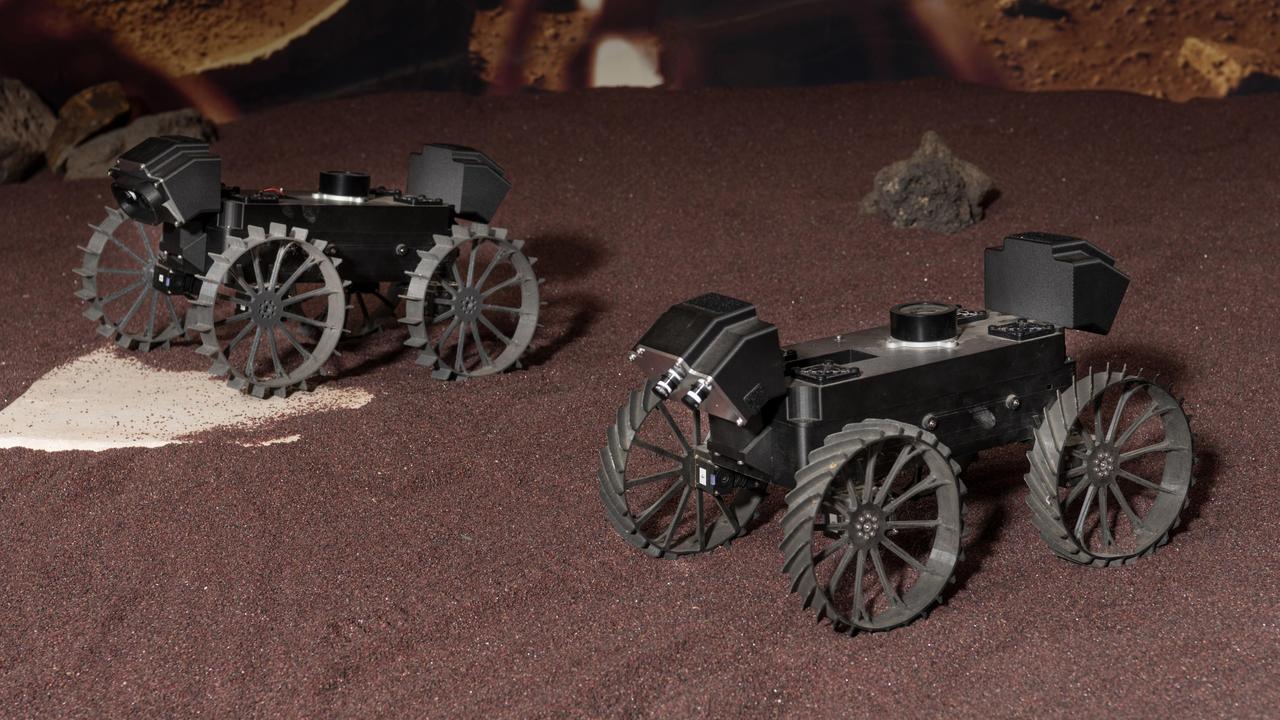
Prototypes of the rovers being built for NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration were tested at the agency's Jet Propulsion Laboratory in Southern California in August 2022. CADRE is a technology demonstration designed to show that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The CADRE team dubbed the seven plastic test prototypes the "Mercury 7" and named each after one of NASA's seven Project Mercury astronauts. John (for John Glenn) and Scott (for Scott Carpenter) are shown here in a sandbox during a test of the rovers' capability for driving in formation. The formation-driving algorithm will be used to help CADRE rovers map the lunar surface and subsurface with cameras and sensors. The prototypes are smaller than the three CADRE rovers slated to arrive at the Moon aboard a lander in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative. Those flight models will be about the size of a carry-on suitcase. https://photojournal.jpl.nasa.gov/catalog/PIA25666

The Earth-bound full-scale engineering model of NASA's Perseverance rover, called OPTIMISM, seems to peer down at a much smaller CADRE rover in a building in the Mars Yard at NASA's Jet Propulsion Laboratory in Southern California in June 2023. Short for Cooperative Autonomous Distributed Robotic Exploration, NASA's CADRE technology demonstration is slated to arrive at the Moon in spring 2024 as part of the agency's CLPS (Commercial Lunar Payload Services) initiative. CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. The development rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. https://photojournal.jpl.nasa.gov/catalog/PIA25668

Senior executives from the Renault-Nissan Alliance visited Ames meet with Ames management and gather for a Autonomous Drive demo. Shown here left to right is Terry Fong, Ames Research Center and Jose Munoz, Chairman, Nissan North America.

Testing autonomous software for AARD program using a NASA F/A-18 #845 following a chartered Sabreliner.

Testing autonomous software for AARD program using a NASA F/A-18 #845 following a chartered Sabreliner.

Two F/A-18B aircraft involved in the AFF program return to base in close formation with the autonomous function disengaged.

F/A-18 #845 HUD and video camera setup for Autonomous Airborne Refueling Demonstration (AARD) project

These two NASA F/A-18 aircraft are flying a test point for the Autonomous Formation Flight project over California's Mojave Desert.

F/A-18 #845 behind an Omega Air Boeing 707 tanker during an Autonomous Airborne Refueling Demonstration (AARD) flight.

F/A-18 #845 testing autonomous system for AARD project by following a pickup with an airborne tanker drogue illustration.

Testing autonomous software for AARD program using a NASA F/A-18 #845 following a chartered Sabreliner.

F/A-18 #845 behind an Omega Air Boeing 707 tanker during an Autonomous Airborne Refueling Demonstration (AARD) flight.

View of the Autonomous Underwater Vehicle (AUV) known as Endurance designed by Stone Aerospace being lowered into the Neutral Buoyancy Laboratory (NBL) pool at the Sonny Carter Training Facility (SCTF) for testing. The AUV is being tested for potential exploration of Jupiter's moon Europa. This image was featured in the August 2008 JSC Roundup, Volume 47, Number 8.

Senior executives from the Renault-Nissan Alliance, including Carlos Ghosn, chairman and CEO of Nissan, and Jose Munoz, chairman of Nissan North America, visited Ames for meetings and a showcase of the technical partnership between NASA and Nissan North America. The partnership allows researchers to develop and test autonomy algorithms, concepts, and integrated prototypes for a variety of vehicular transport applications – from rovers to self-driving cars. After briefings, the group on left from left to right Kathy Sun and Liam Pedersen, Nissan and on right from front to back Carlos Ghosn, CE, Nissan chatted before taking a ride in the autonomous vehicle to observed testing of Nissan’s all-electric LEAF as it performed safe autonomous drives across the center.

NASA's F/A-18B #845 was captured by the photographer as it returned from its final flight in the Autonomous Airborne Refueling Demonstration research project.

Two NASA Dryden F/A-18's land on the Edwards Air Force Base runway after completion of an Autonomous Formation Flight (AFF) mission.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Flying an Autonomous Formation Flight mission, two F/A-18s from the NASA Dryden Flight Research Center, Edwards, California, gain altitude near Rogers Dry Lake.

This true-color image is the result of the first observation of a target selected autonomously by NASA Mars Exploration Rover Opportunity using newly developed and uploaded software named Autonomous Exploration for Gathering Increased Science, or AEGIS.

This Nissan LEAF vehicle being tested on the Ames campus is equipped with cameras, sensors and cellular data networking, and uses robotics software originally developed for Ames’ K-10 and K-REX planetary rovers to operate autonomously. Shown here are Kathy Sun and Liam Pedersen, Nissan who are awaiting the arrival of the visiting group from Renault-Nissan Alliance for a demo ride across Ames.

Senior executives from the Renault-Nissan Alliance, including Carlos Ghosn, chairman and CEO of Nissan, and Jose Munoz, chairman of Nissan North America, visited Ames for meetings and a showcase of the technical partnership between NASA and Nissan North America. After briefings, the group observed testing of Nissan’s all-electric LEAF as it performed safe autonomous drives across the center.

Senior executives from the Renault-Nissan Alliance, including Carlos Ghosn, chairman and CEO of Nissan, and Jose Munoz, chairman of Nissan North America, visited Ames for meetings and a showcase of the technical partnership between NASA and Nissan North America. After briefings, the group gathers in at the Autonomous Sciences Research Facility for a remote vehicle monitoring demo.

NASA pilot Scott Howe, left, and Sikorsky safety pilot Brent Davis, prepare to board Sikorsky’s SARA S-76B experimental aircraft at Sikorsky Memorial Airport, Bridgeport, Connecticut on Tuesday, Oct. 24, 2023. In addition to Sikorsky’s MATRIX autonomous flight technology, SARA is also outfitted with multiple NASA autonomous flight software systems the pilots and test team will evaluate during their flights over Long Island Sound.

iss074e0000788 (Dec. 13, 2025) --- The county-level city of Erenhot in China's autonomous region of Inner Mongolia is pictured during a dry, deep winter from the International Space Station as it orbited 263 miles above Earth. Erenhot is a key border town for trade and international railway crossings between China and Mongolia. The city is also known for its paleontological history and numerous discoveries of dinosaur fossils.

Pilot Dick Ewers and flight test engineer Leslie Molzahn were hands-off as NASA F/A-18 #845 flew itself into the drogue on an autonomous refueling demonstration.

Autonomous wave gliders are seen onboard the the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)
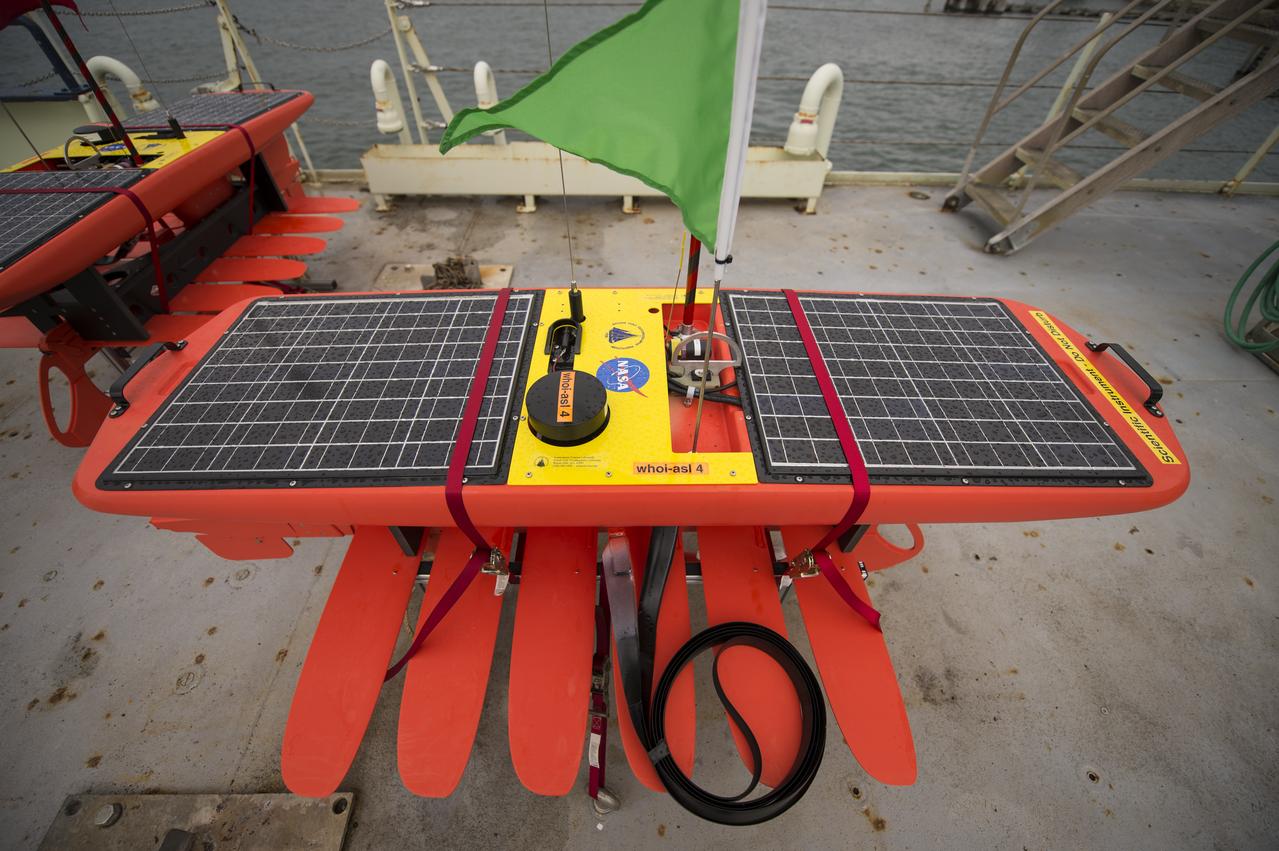
Autonomous wave gliders are seen onboard the the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

Autonomous wave gliders are seen onboard the the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

NASA Physical Oceanography Program Scientist Eric Lindstrom inspects an autonomous wave glider onboard the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

NASA Physical Oceanography Program Scientist Eric Lindstrom inspects an autonomous wave glider onboard the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

This unique view, looking directly up at two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program, was captured by Carla Thomas from another F-18 flying safety/chase.

Smoke generators show the twisting paths of wingtip vortices behind two NASA Dryden F/A-18's used in the Autonomous Formation Flight (AFF) program during flight #743.

Autonomous wave gliders, right, are seen onboard the the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The autonomous gliders will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

NASA human factors researcher Kevin J. Monk, left, and NASA pilot Scott Howe verify the connectivity and accuracy of the biometric sensors placed on Howe for test flight at Sikorsky Memorial Airport, Bridgeport, Connecticut on Tuesday, Oct. 24, 2023. These sensors will track various physiological responses sending the data to Monk’s computer as Howe engages with the autonomous flight software used to fly the aircraft.

NASA research pilot David Zahn, left, wearing a temporal sensor and pupil tracking glasses works with NASA human factors researcher Kevin J. Monk to calibrate the glasses for accuracy, Thursday, Oct. 26, 2023. The researchers will use the glasses for Advanced Air Mobility autonomous flight research at Sikorsky Memorial Airport in Bridgeport, Connecticut to evaluate the time a pilot spends looking at a navigation tablet along with their vision pattern while using the tablet.

NASA pilots along with Sikorsky safety pilots take off in Sikorsky’s SARA S-76B, left, and Black Hawk Optionally Piloted Vehicle from Sikorsky Memorial Airport, Bridgeport, Connecticut on Tuesday, Oct. 24, 2023. NASA is using these experimental aircraft to test and evaluate multiple autonomous flight software systems designed for Advanced Air Mobility concepts.
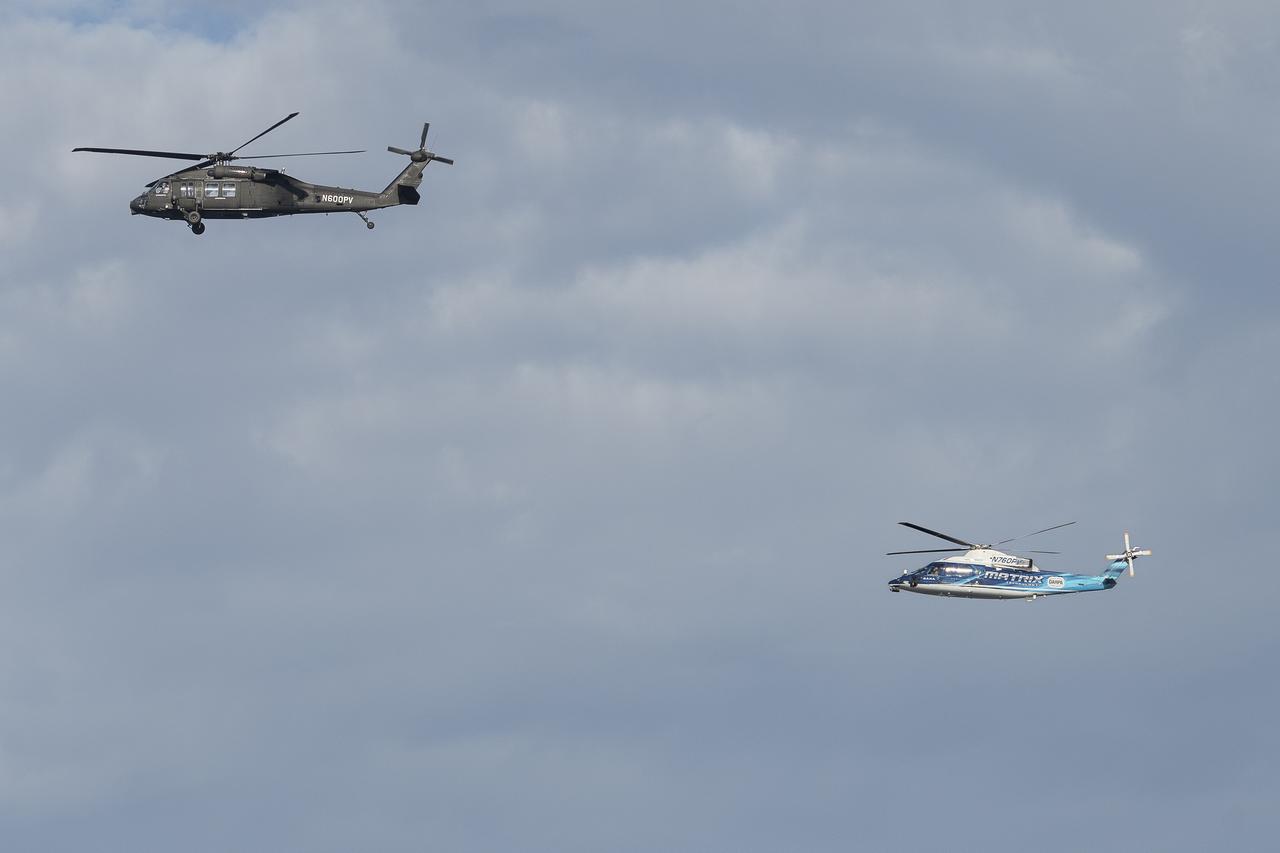
NASA pilots along with Sikorsky safety pilots flying Sikorsky’s Black Hawk Optionally Piloted Vehicle, left, and SARA S-76B over Long Island Sound Thursday, Oct. 26, 2023. These flights will allow NASA researchers to test and evaluate multiple Advanced Air Mobility autonomous flight software products designed by NASA.

This image from NASA Terra spacecraft shows the Faroe Islands, an archipelago and autonomous country within the Kingdom of Denmark, comprising 18 major islands.

NASA Headquarters lobby is seen with a model of the Cislunar Autonomous Positioning System Technology Operations and Navigation Experiment (CAPSTONE) on display during a 2-day event where NASA outlined how the agency is executing President Donald J. Trump’s National Space Policy and accelerating preparations for America’s return to the surface of the Moon by 2028, Wednesday, March 25, 2026, at the Mary W. Jackson NASA Headquarters building in Washington. During the event NASA leadership provided updates on mission priorities, including sending the first astronauts to the lunar surface in more than 50 years, establishing the initial elements of a permanent lunar base, getting America underway in space on nuclear propulsion, and other objectives. Photo Credit: (NASA/Bill Ingalls)

Project manager Jean-Pierre de la Croix works on an Autonomous Pop-Up Flat Folding Explorer Robot (A-PUFFER) during recent trials in the Mars Yard at NASA's Jet Propulsion Laboratory. This PUFFER is equipped with an onboard computer and stereo camera as well as other sensors to help it autonomously navigate and collaborate with other PUFFERs. https://photojournal.jpl.nasa.gov/catalog/PIA23794

Two EcoMapper AUVs (autonomous underwater vehicles) are seen onboard the the Woods Hole Oceanographic Institution research vessel Knorr on Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The EcoMappers will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

JPL Advanced Spaceborne Thermal Emission and Reflection Radiometer aboard NASA Terra satellite, shows Lhasa, the traditional seat of the Dalai Lama and capital of the Tibet Autonomous Region in China.

This image is the result of the first observation of a target selected autonomously by NASA Opportunity using newly developed and uploaded software called AEGIS. The false color makes some differences between materials easier to see.

This image was taken during a flight test of JPL Autonomous Descent and Ascent Powered-Flight Testbed ADAPT. The testbed was flown aboard a Masten Space System Xombie rocket.-Flight Testbed ADAPT.
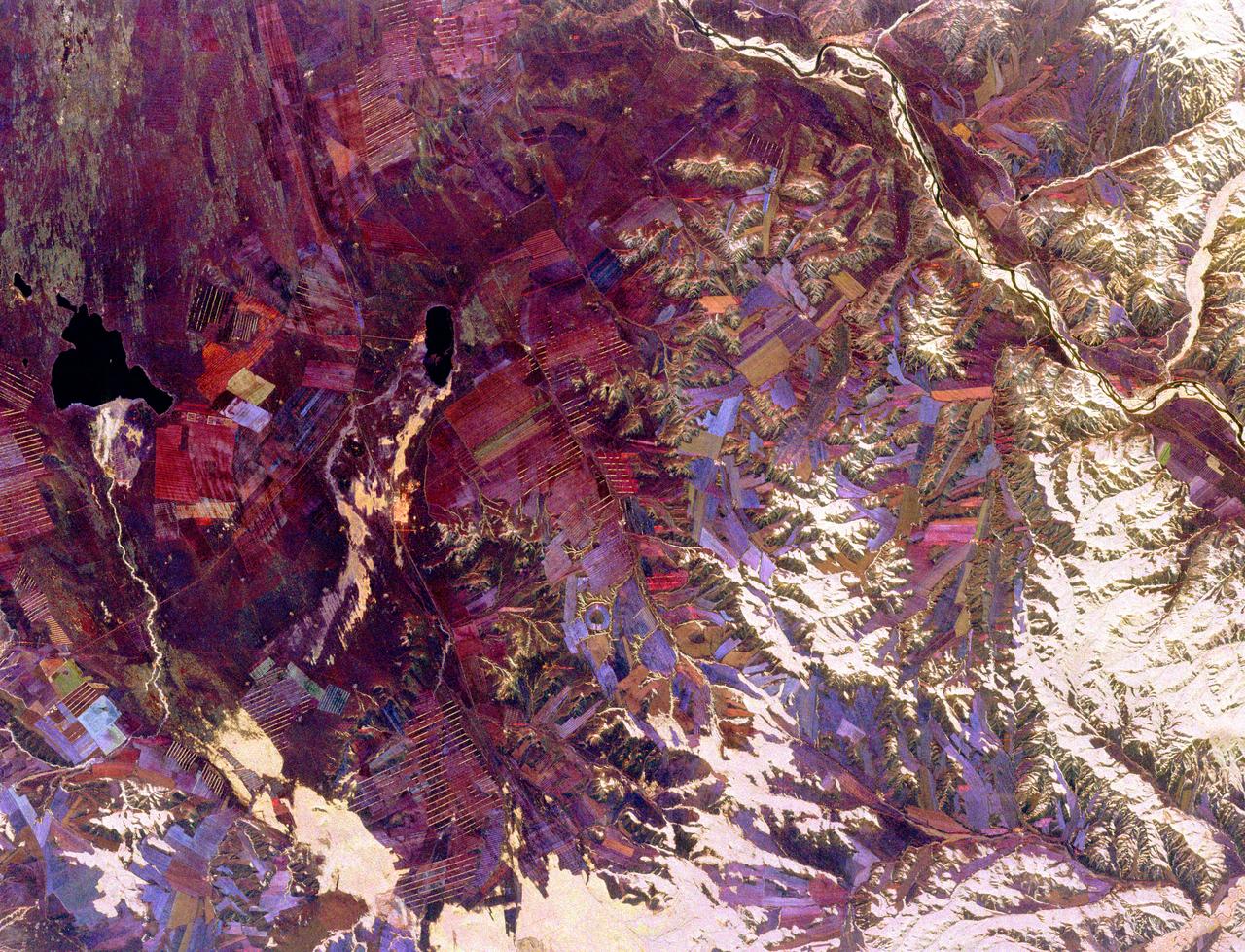
This spaceborne radar image shows part of the remote central Asian region of Tuva, an autonomous republic of the Russian Federation. Tuva is a mostly mountainous region that lies between western Mongolia and southern Siberia.

Woods Hole Oceanographic Institution Scientist Dave Fratantoni works on the EcoMapper AUVs (autonomous underwater vehicles) onboard the Institute's research vessel Knorr, Tuesday, Sept. 4, 2012, in Woods Hole, Mass. The EcoMappers will be deployed in the Atlantic Ocean as part of the Salinity Processes in the Upper Ocean Regional Study (SPURS) which is set to sail on Sept. 6. The NASA-sponsored expedition will sail to the North Atlantic's saltiest spot to get a detailed, 3-D picture of how salt content fluctuates in the ocean's upper layers and how these variations are related to shifts in rainfall patterns around the planet. Photo Credit: (NASA/Bill Ingalls)

This artist concept shows the Mars Helicopter, a small, autonomous rotorcraft, which will travel with NASA's Mars 2020 rover mission, currently scheduled to launch in July 2020, to demonstrate the viability and potential of heavier-than-air vehicles on the Red Planet. https://photojournal.jpl.nasa.gov/catalog/PIA22460
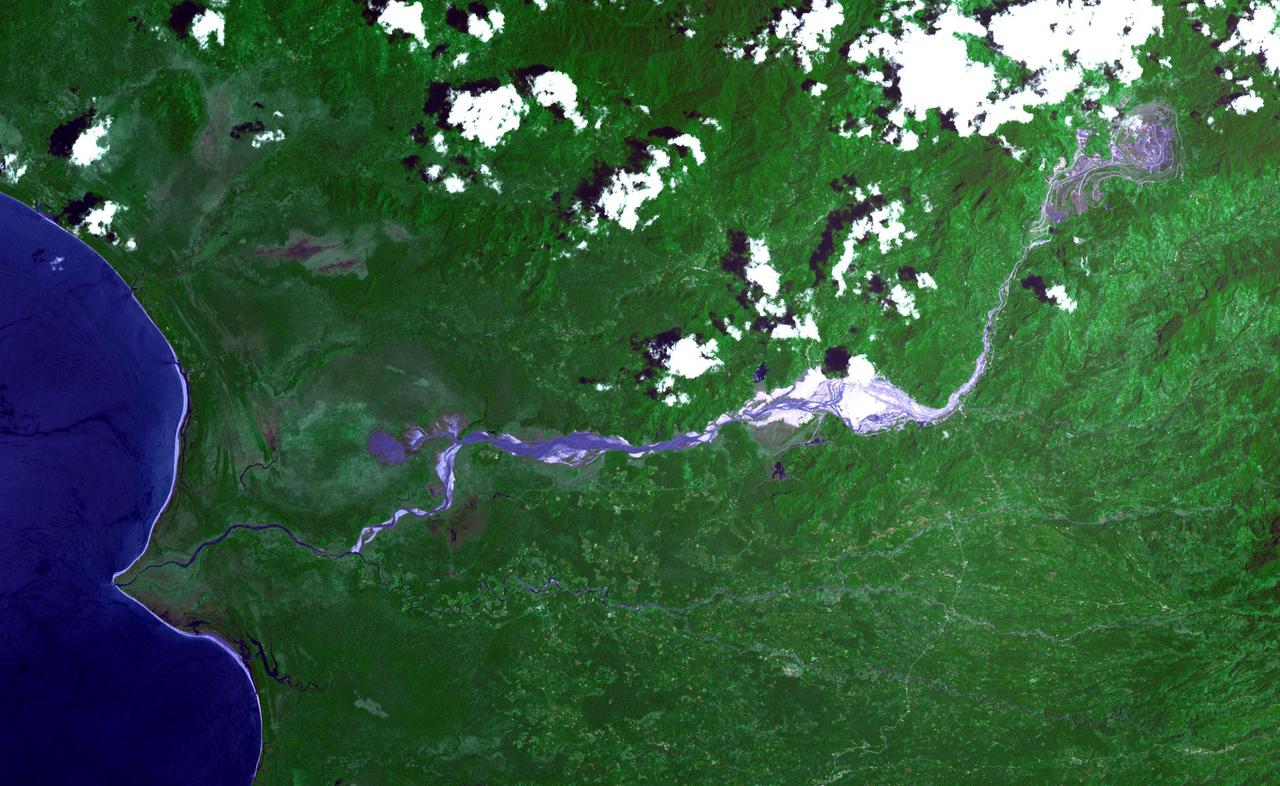
The Panguna copper ore deposit was discovered in 1969 in the Autonomous Region of Bougainville, Papua New Guinea. It has one of the largest reserves in the world, with 1 billion tons of copper and 12 million ounces of gold. In 1989 the then world's largest open pit copper-gold mine closed as a result of conflict between the mine owners and traditional land owners over the profits. The mine owners were also accused of poisoning the entire length of the Jaba River. The image was acquired November 12, 2013, covers an area of 24 by 39 kilometers, and is located at 6.3 degrees south, 155.5 degrees east. https://photojournal.jpl.nasa.gov/catalog/PIA23338

NASA Stennis summer intern Logan Blesse, left, shares about his work on future lunar autonomous robotic development during an Aug. 7 event hosted by the Office of STEM Engagement. Blesse, a student at The University of Southern Mississippi in Hattiesburg, worked with the NASA Stennis Autonomous Systems Laboratory. The poster symposium highlighted research topics, including propulsion test operations, lunar robotics, autonomous systems, STEM education, and more. NASA’s Office of STEM Engagement paid internships allow high school and college-level students to contribute to the agency’s mission to advance science, technology, aeronautics, and space exploration.

The Falcon 9 rocket booster used for NASA’s SpaceX Crew-5 launch sits atop the autonomous spaceport drone ship (ASDS), named Just Read the Instructions (JRTI), as it is towed into Port Canaveral by the SpaceX multi-purpose recovery ship Doug, Saturday, Oct. 8, 2022, in Cape Canaveral, Florida. NASA’s SpaceX Crew-5 mission is the fifth crew rotation mission of the SpaceX Crew Dragon spacecraft and Falcon 9 rocket to the International Space Station as part of the agency’s Commercial Crew Program. NASA astronauts Nicole Mann and Josh Cassada, Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, and Roscosmos cosmonaut Anna Kikina launched on Oct. 5 from Launch Complex 39A at the Kennedy Space Center. Photo Credit: (NASA/Bill Ingalls)

Beach goers watch as the Falcon 9 rocket booster used for NASA’s SpaceX Crew-5 launch, sitting atop the autonomous spaceport drone ship (ASDS), is towed into Port Canaveral, Saturday, Oct. 8, 2022, in Cape Canaveral, Florida. NASA’s SpaceX Crew-5 mission is the fifth crew rotation mission of the SpaceX Crew Dragon spacecraft and Falcon 9 rocket to the International Space Station as part of the agency’s Commercial Crew Program. NASA astronauts Nicole Mann and Josh Cassada, Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, and Roscosmos cosmonaut Anna Kikina launched on Oct. 5 from Launch Complex 39A at the Kennedy Space Center. Photo Credit: (NASA/Bill Ingalls)

In this photograph, a tethered Axel robot — part of the four-wheeled DuAxel rover — navigates a steep slope during a field test in the Mojave Desert. The tether, which connects to the rover's other half, serves as a climbing rope of sorts while also providing power and a means of communication. This flexibility was built with crater walls, pits, scarps, vents, and other extreme terrain in mind. That's because on Earth, some of the best locations to study geology can be found in rocky outcrops and cliff faces, where many layers of the past are neatly exposed. They're hard enough to reach here, let alone on the Moon, Mars, and other celestial bodies. The DuAxel project is a technology demonstration being developed by roboticists at NASA's Jet Propulsion Laboratory in Southern California to see how this unconventional rover might fill a niche in planetary exploration. https://photojournal.jpl.nasa.gov/catalog/PIA24110
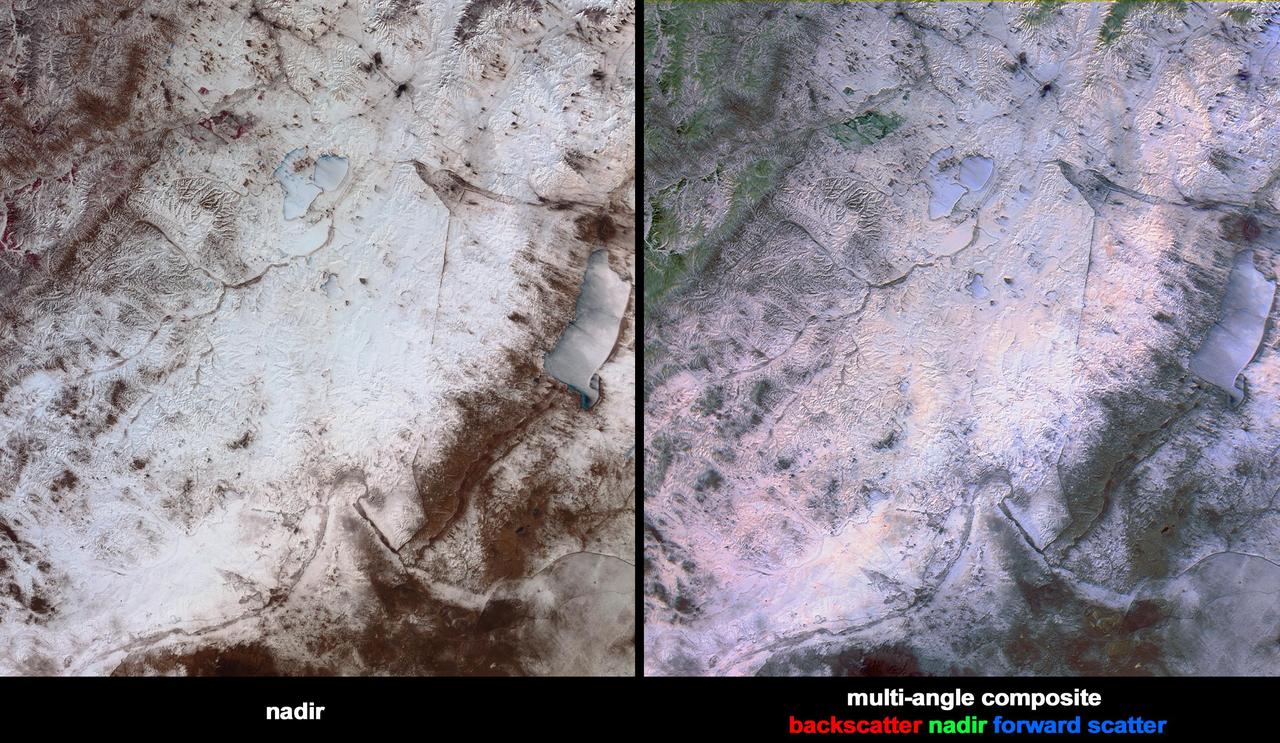
Heavy snowfall on March 12, 2004, across north China Inner Mongolia Autonomous Region, Mongolia and Russia, caused train and highway traffic to stop for several days along the Russia-China border shown here by NASA Terra spacecraft.

JOSH WHITE DEMONSTRATING THE CAPABILITIES OF THE SYSTEM TO AUTONOMOUSLY INSPECT AND MACHINE ADDITIVELY MANUFACTURED PARTS (SAIMAP).

Masten Space Systems’ technician making adjustments to NASA’s autonomous landing technologies payload on Masten’s Xodiac rocket.

iss065e327831 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e333863 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e333824 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e333865 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.
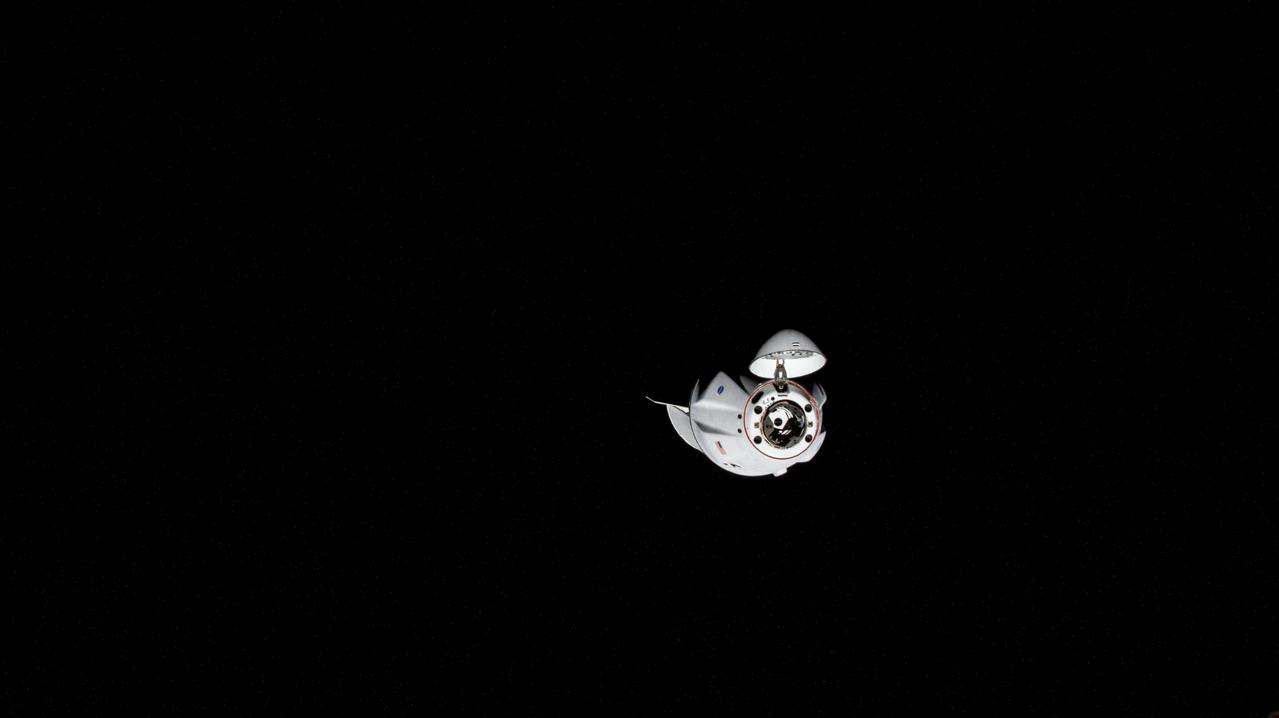
iss065e333870 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e327741 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e327939 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.
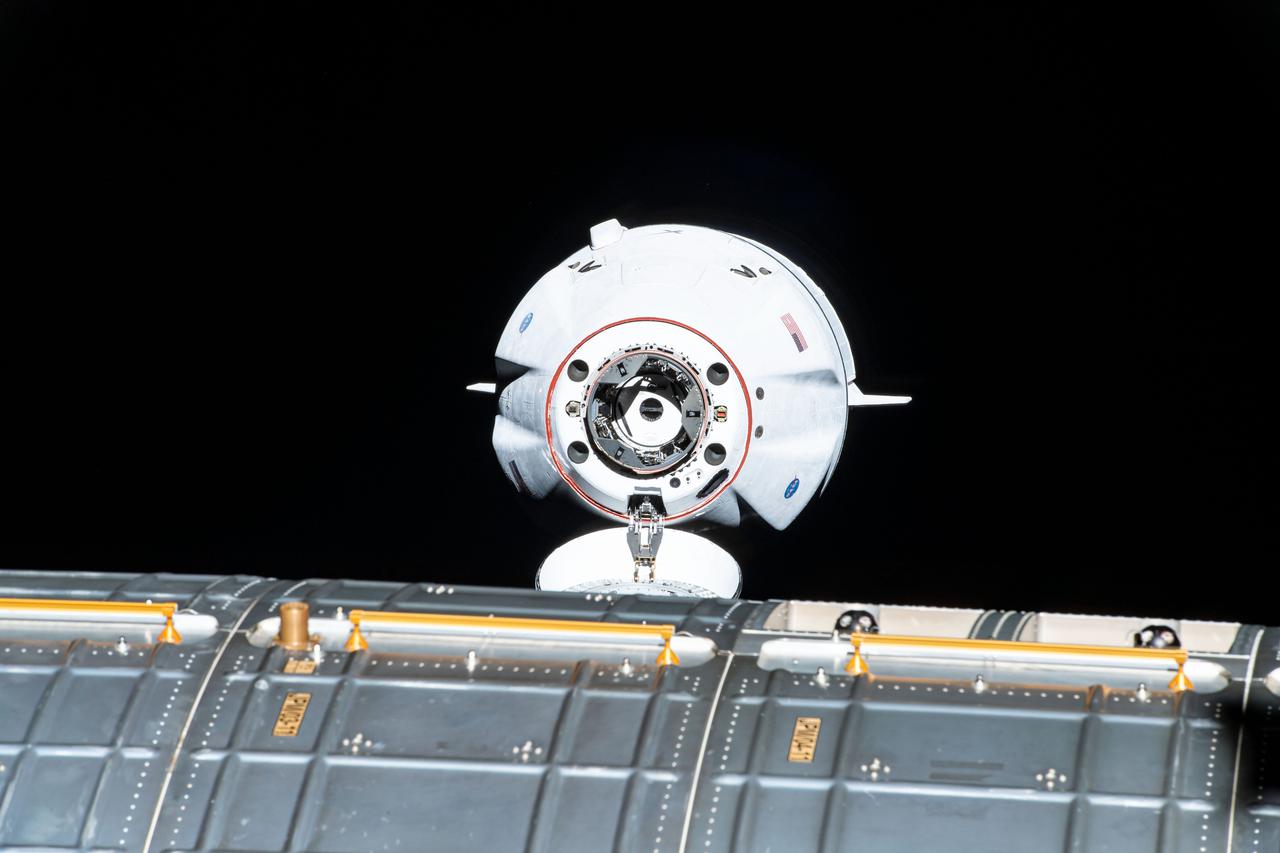
iss065e333833 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

iss065e327840 (Aug. 30, 2021) --- The SpaceX Cargo Dragon vehicle approaches the International Space Station for an autonomous docking to the Harmony module's forward international docking adapter.

NASA Deputy Administrator Lori Garver, left, listens as Worcester Polytechnic Institute (WPI) Robotics Resource Center Director and NASA-WPI Sample Return Robot Centennial Challenge Judge Ken Stafford points out how the robots navigate the playing field during the challenge on Saturday, June 16, 2012 in Worcester, Mass. Teams were challenged to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

NASA Deputy Administrator Lori Garver, right, listens as Worcester Polytechnic Institute (WPI) Robotics Resource Center Director and NASA-WPI Sample Return Robot Centennial Challenge Judge Ken Stafford points out how the robots navigate the playing field during the challenge on Saturday, June 16, 2012 in Worcester, Mass. Teams were challenged to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)
Intrepid Systems robot, foreground, and the University of Waterloo (Canada) robot, take to the practice field on Friday, June 15, 2012 at the Worcester Polytechnic Institute (WPI) in Worcester, Mass. Robot teams will compete for a $1.5 million NASA prize in the NASA-WPI Sample Return Robot Centennial Challenge at WPI. Teams have been challenged to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

Panoramic of some of the exhibits available on the campus of the Worcester Polytechnic Institute (WPI) during their "TouchTomorrow" education and outreach event that was held in tandem with the NASA-WPI Sample Return Robot Centennial Challenge on Saturday, June 16, 2012 in Worcester, Mass. The NASA-WPI challenge tasked robotic teams to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Anthony Shrout)
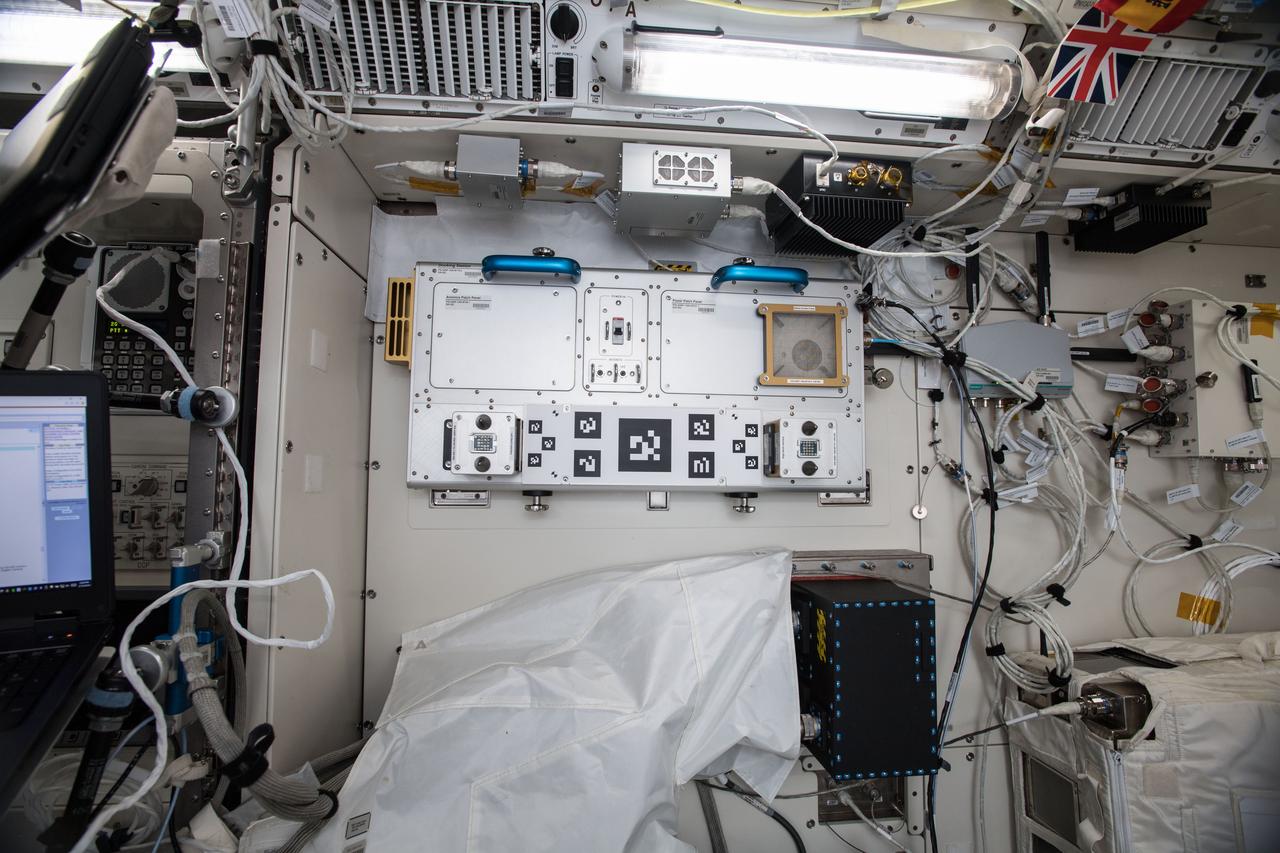
iss058e013773 (2/15/2019) --- A view of the Astrobee docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.

A judge for the NASA-WPI Sample Return Robot Centennial Challenge follows a robot on the playing field during the challenge on Saturday, June 16, 2012 in Worcester, Mass. Teams were challenged to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

"Harry" a Goldendoodle is seen wearing a NASA backpack during the Worcester Polytechnic Institute (WPI) "TouchTomorrow" education and outreach event that was held in tandem with the NASA-WPI Sample Return Robot Centennial Challenge on Saturday, June 16, 2012 in Worcester, Mass. The challenge tasked robotic teams to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

University of Waterloo (Canada) Robotics Team members test their robot on the practice field one day prior to the NASA-WPI Sample Return Robot Centennial Challenge, Friday, June 15, 2012 at the Worcester Polytechnic Institute in Worcester, Mass. Teams will compete for a $1.5 million NASA prize to build an autonomous robot that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

The bronze statue of the goat mascot for Worcester Polytechnic Institute (WPI) named "Gompei" is seen wearing a staff t-shirt for the "TouchTomorrow" education and outreach event that was held in tandem with the NASA-WPI Sample Return Robot Centennial Challenge on Saturday, June 16, 2012 in Worcester, Mass. The challenge tasked robotic teams to build autonomous robots that can identify, collect and return samples. NASA needs autonomous robotic capability for future planetary exploration. Photo Credit: (NASA/Bill Ingalls)

iss059e072518 (5/23/2019) --- Canadian Space Agency (CSA) astronaut David Saint-Jacques is photographed working with the free-flying Astrobee cube named Bumble and the docking station onboard the International Space Station (ISS). Astrobee consists of three self-contained, free flying robots and a docking station for use inside the ISS. It is an autonomous free flyer powered by fans and operates in the entire U.S. Operating Segment (USOS) using vision-based navigation. The autonomous robots are operated remotely from the ground.