
Diane Linne in the Simulated Lunar Operations, SLOPE Lab - Percussive Excavation Bucket reduces reaction forces for extraterrestrial digging of loose and compacted or icy soils.

This video clip shows a test of a new percussive drilling technique at NASA's Jet Propulsion Laboratory in Pasadena, California. On May 19, NASA's Curiosity rover is scheduled to test percussive drilling on Mars for the first time since December 2016. The video clip was shot on March 28, 2018. It has been sped up by 50 times. Curiosity's drill was designed to pulverize rocks samples into powder, which can then be deposited into two chemistry laboratories carried inside of the rover. Curiosity's science team is eager to the rover using percussive drilling again; it will approach a clay-enriched area later this year that could shed new light on the history of water in Gale Crater. An animation is available at https://photojournal.jpl.nasa.gov/catalog/PIA22324
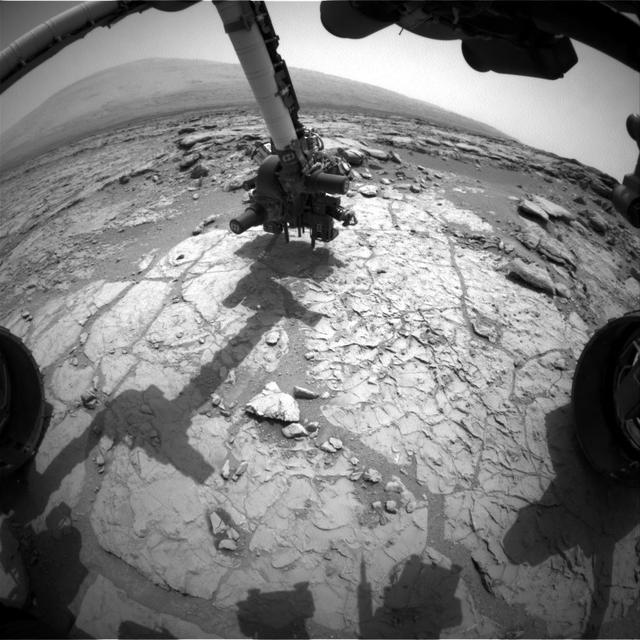
The percussion drill in the turret of tools at the end of the robotic arm of NASA Mars rover Curiosity has been positioned in contact with the rock surface in this image from the rover front Hazard-Avoidance Camera Hazcam.

The bit in the rotary-percussion drill of NASA Mars rover Curiosity left its mark in a target patch of rock called John Klein during a test on Feb. 2, 2013, in preparation for the first drilling of a rock by the rover.

The robotic arm on NASA's Perseverance Mars rover used its percussive drill to eject fragments of cored rock from a sample tube on Jan. 15, 2022, the 322nd Martian day, or sol, of the mission. One of the rover's hazard cameras (hazcam) obtained same-day, before-and-after images of the surface below the rover to help better understand the results of this operation. There are two versions of the image: Animation frame 1 shows the ground below Perseverance prior to the use of the rover's percussive drill on Jan. 15. Animation frame 2 shows the same ground later that same day, after the percussive drill was employed. In this second image, at least eight new pieces of rock fragments can be seen. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA25070

In this image taken on July 11, 2019, engineers at JPL install a sensor-filled turret on the end of the rover's 7-foot-long (2.1-meter-long) robotic arm. The turret includes HD cameras, the Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals (SHERLOC) science instrument, the Planetary Instrument for X-ray Lithochemistry (PIXL) science instrument, and a percussive drill and coring mechanism. https://photojournal.jpl.nasa.gov/catalog/PIA23311

In this video, the robotic arm on NASA’s Perseverance Mars rover uses its percussive drill on a rocky outcrop near the rim of Jezero Crater that the science team calls “Kenmore” on June 10, 2025, the 1,531st Martian day, or sol, of the mission. Before drilling, the team abraded the rock to determine it was worthy of drilling. The eight images that make up this GIF were taken approximately one minute apart by one of the rover's front hazard-avoidance cameras. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA26575

A portion of a cored-rock sample is ejected from the rotary percussive drill on NASA's Perseverance Mars rover. The imagery was collected by the rover's Mastcam-Z instrument on Jan. 15, 2022, the 322nd Martian day, or sol, of the mission, during an experiment that oriented the drill and sample tube (unseen here) around 9 degrees below horizontal and then rotated and extended the drill's spindle. The Mastcam-Z investigation is led and operated by Arizona State University in Tempe, working in collaboration with Malin Space Science Systems in San Diego, California, on the design, fabrication, testing, and operation of the cameras, and in collaboration with the Neils Bohr Institute of the University of Copenhagen on the design, fabrication, and testing of the calibration targets. A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA25072

This photo taken in the "Mars Yard" at NASA's Jet Propulsion Laboratory, Pasadena, California, on Aug. 1, 2017, shows a step in development of possible alternative techniques that NASA's Curiosity Mars rover might be able to use to resume drilling into rocks on Mars. In late 2016, after Curiosity's drill had collected sample material from 15 Martian rocks in four years, the drill's feed mechanism ceased working reliably. That motorized mechanism moved the bit forward or back with relation to stabilizer posts on either side of the bit. In normal drilling by Curiosity, the stabilizers were positioned on the target rock first, and then the feed mechanism extended the rotation-percussion bit into the rock. In the alternative technique seen here, called "feed-extended drilling," the test rover's stabilizers are not used to touch the rock. The bit is advanced into the rock by motion of the robotic arm rather than the drill's feed mechanism. https://photojournal.jpl.nasa.gov/catalog/PIA22062

Members of JPL's assembly, test and launch operations team for NASA's Perseverance mission show appreciation for their newly named rover. The image was taken on March 4, 2020, at a payload processing facility at NASA's Kennedy Space Center. The plate is actually a rock and debris shield, designed to protect a cable that carries power and data from computers in the rover's body to actuators in the arm, as well as to the rotary percussive drill and instruments in the turret. Weighing in at about 104 grams (3.7 ounces), the 17-inch-long by 3.25-inch-wide (43-centimeter-long by 8.26-centimeter-wide) plate was cut using a water jet. The surface was coated with black thermal paint before a computer-guided laser generated the name "Perseverance" by ablating paint off the surface. The nameplate was attached to the rover on March 4, 2020. https://photojournal.jpl.nasa.gov/catalog/PIA23767

The robotic arm on NASA's Perseverance Mars rover used its percussive drill to core and collect the "Main River" rock sample on March 10, 2025, the 1,441st Martian day, or sol, of the mission. The time-lapse movie, taken by one of the rover's hazard cameras, is made up of 35 images taken over the course of 34 minutes. The sample was taken from a rock the rover science team named "Broom Point" at a location near the rim of Jezero Crater called "Witch Hazel Hill." A key objective for Perseverance's mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet's geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 Perseverance mission is part of NASA's Mars Exploration Program (MEP) portfolio and the agency's Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA26571

In the summer and fall of 2017, the team operating NASA's Curiosity Mars rover conducted tests in the "Mars Yard" at NASA's Jet Propulsion Laboratory, Pasadena, California, to develop techniques that Curiosity might be able to use to resume drilling into rocks on Mars. JPL robotics engineer Vladimir Arutyunov, in this June 29, 2017, photo, checks the test rover's drill bit at its contact point with a rock. Note that the stabilizer post visible to the right of the bit is not in contact with the rock, unlike the positioning used and photographed by Curiosity when drilling into rocks on Mars in 2013 to 2016. In late 2016, after Curiosity's drill had collected sample material from 15 Martian rocks, the drill's feed mechanism ceased working reliably. That motorized mechanism moved the bit forward or back with relation to the stabilizer posts on either side of the bit. In normal drilling by Curiosity, the stabilizers were positioned on the target rock first, and then the feed mechanism extended the rotation-percussion bit into the rock. In the alternative technique seen here, called "feed-extended drilling," the test rover's stabilizers are not used to touch the rock. The bit is advanced into the rock by motion of the robotic arm rather than the drill's feed mechanism. https://photojournal.jpl.nasa.gov/catalog/PIA22061

NASA's Curiosity Mars rover conducted a test on Oct. 17, 2017, as part of the rover team's development of a new way to use the rover's drill. This image from Curiosity's front Hazard Avoidance Camera (Hazcam) shows the drill's bit touching the ground during an assessment of measurements by a sensor on the rover's robotic arm. Curiosity used its drill to acquire sample material from Martian rocks 15 times from 2013 to 2016. In December 2016, the drill's feed mechanism stopped working reliably. During the test shown in this image, the rover touched the drill bit to the ground for the first time in 10 months. The image has been adjusted to brighten shaded areas so that the bit is more evident. The date was the 1,848th Martian day, or sol, of Curiosity's work on Mars In drill use prior to December 2016, two contact posts -- the stabilizers on either side of the bit -- were placed on the target rock while the bit was in a withdrawn position. Then the motorized feed mechanism within the drill extended the bit forward, and the bit's rotation and percussion actions penetrated the rock. A promising alternative now under development and testing -- called feed-extended drilling -- uses motion of the robotic arm to directly advance the extended bit into a rock. In this image, the bit is touching the ground but the stabilizers are not. In the Sol 1848 activity, Curiosity pressed the drill bit downward, and then applied smaller sideways forces while taking measurements with a force/torque sensor on the arm. The objective was to gain understanding about how readings from the sensor can be used during drilling to adjust for any sideways pressure that might risk the bit becoming stuck in a rock. While rover-team engineers are working on an alternative drilling method, the mission continues to examine sites on Mount Sharp, Mars, with other tools. https://photojournal.jpl.nasa.gov/catalog/PIA22063