The ISRU Pilot Excavator is tested in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

With the lights out, the ISRU Pilot Excavator digs in regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab operates a test of the ISRU Pilot Excavator in regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

The ISRU Pilot Excavator digs in the regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

With the lights out, the ISRU Pilot Excavator digs in regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.
With the lights out, the ISRU Pilot Excavator digs in regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

The ISRU Pilot Excavator digs in the regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

The ISRU Pilot Excavator digs its way through the regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

With the lights out, the ISRU Pilot Excavator digs in the regolith bin during testing inside Swamp Works at NASA’s Kennedy Space Center in Florida on July 28, 2022. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like the Pilot Excavator will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. The Pilot Excavator can scoop up icy regolith which can be used to make operations on the Moon sustainable.

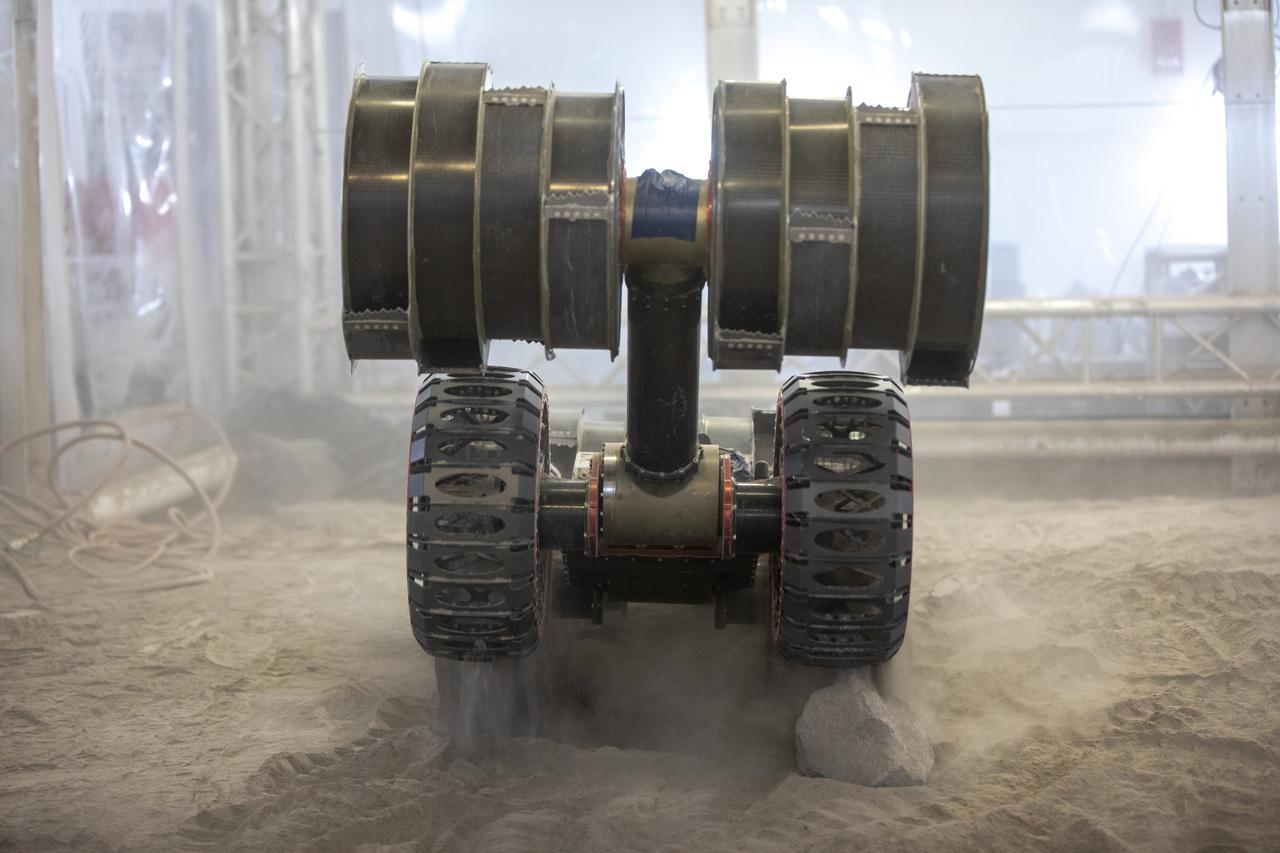
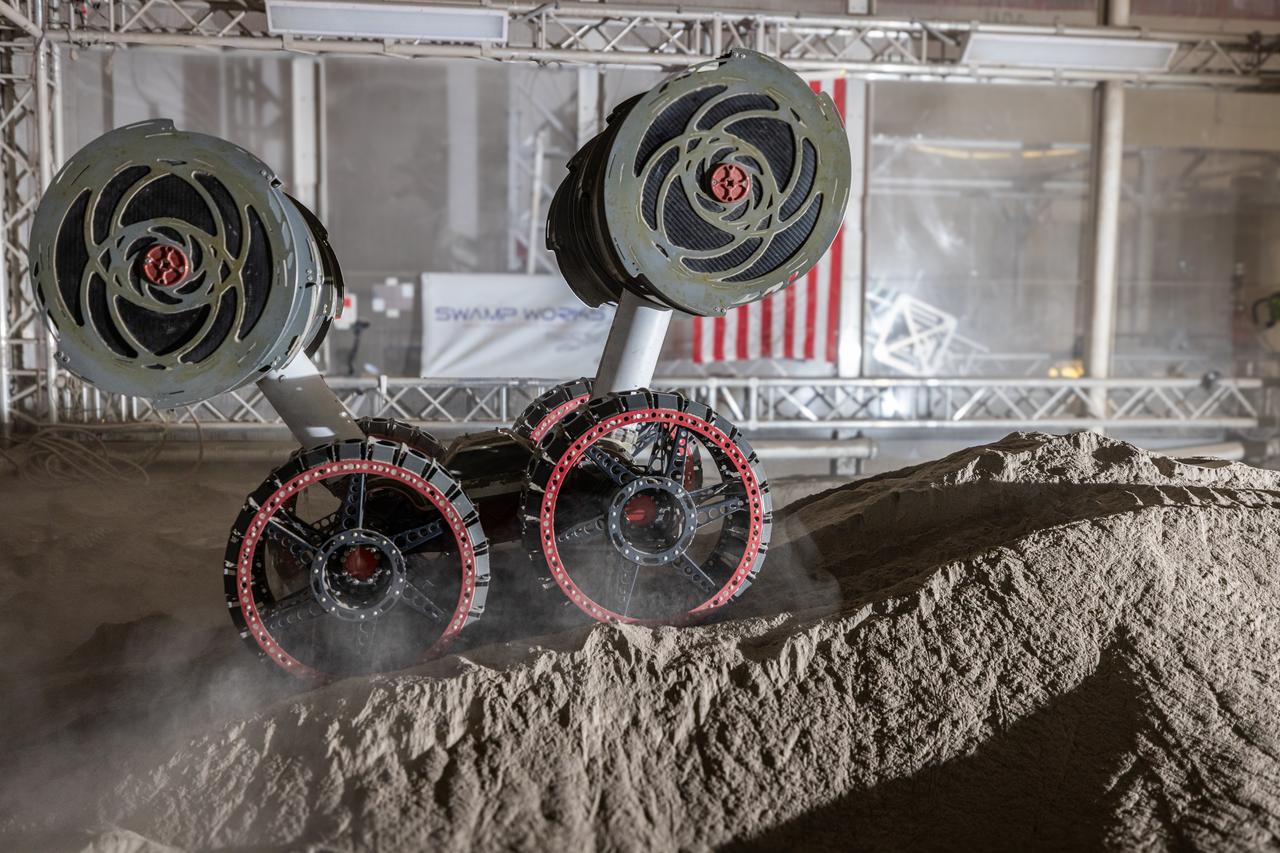
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) manipulates simulated regolith, or lunar dust found on the Moon’s surface, to create a three-foot berm during a site preparation test inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, June 3, 2025. The opposing motion of the bucket drums helps RASSOR grip the surface in low-gravity environments like the Moon or Mars. With this unique capability, RASSOR can traverse the rough surface to dig, load, haul, and dump regolith that could be used in construction or broken down into hydrogen, oxygen, or water, resources critical for sustaining human presence. RASSOR represents an earlier generation technology that informed the development of NASA’s IPEx (In-Situ Resource Utilization Pilot Excavator), serving as a precursor and foundational platform for the advanced excavation systems and autonomous capabilities now being demonstrated by this Moon-mining robot.

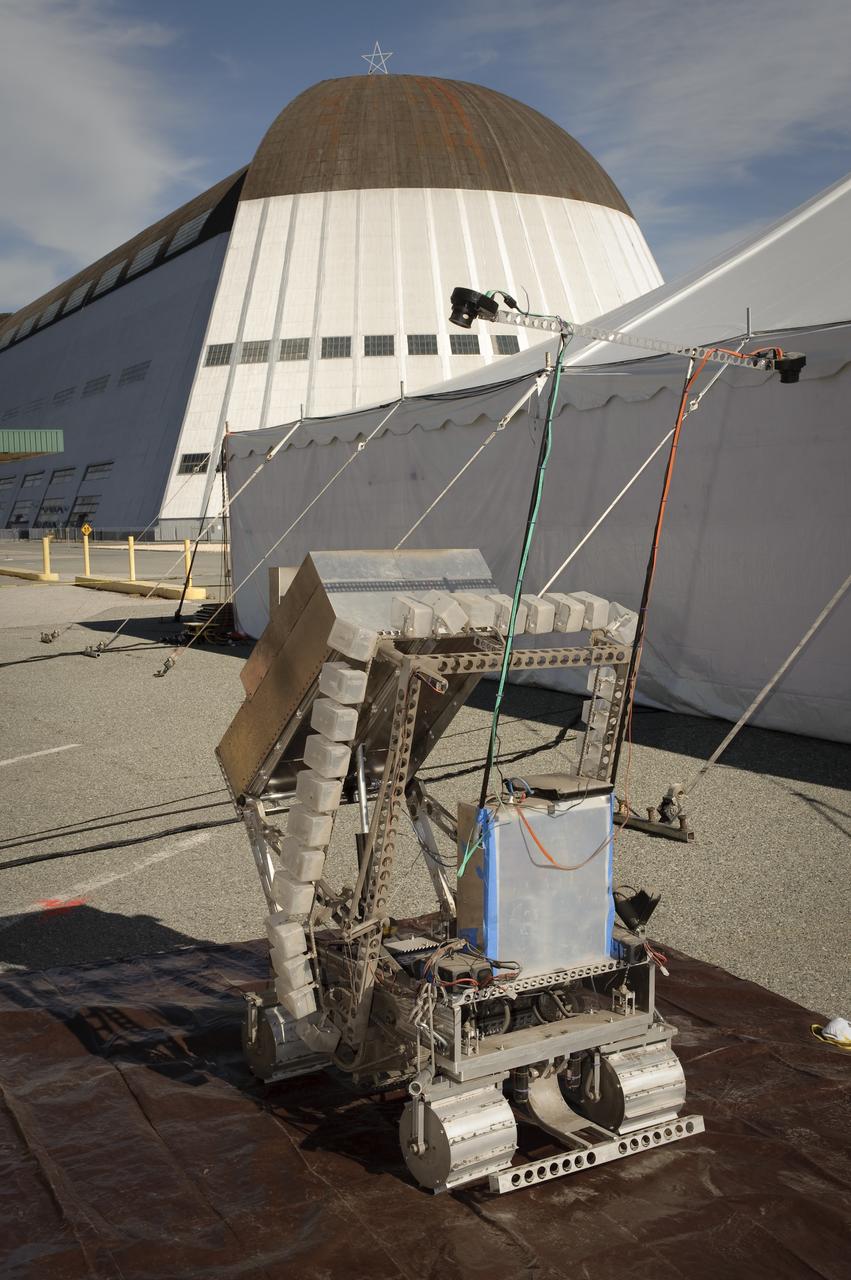
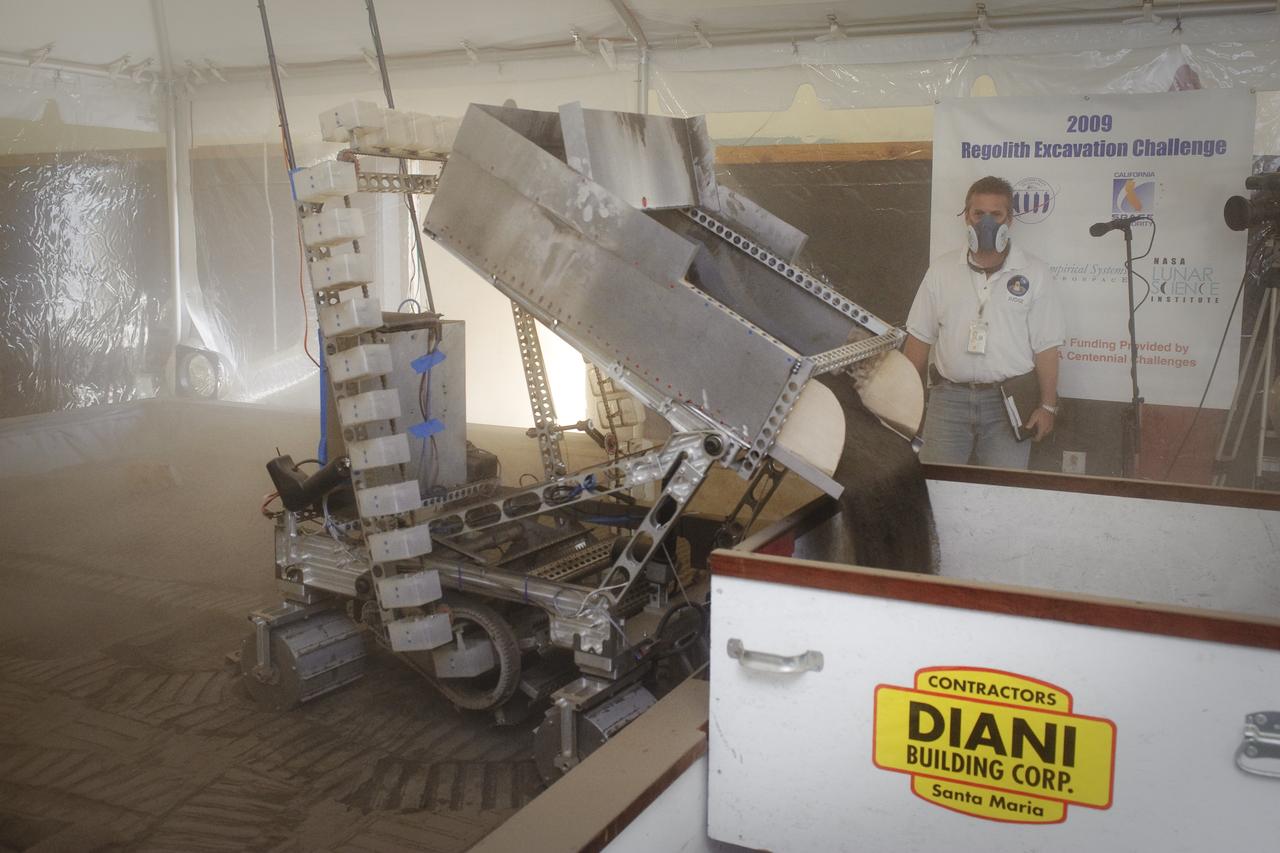
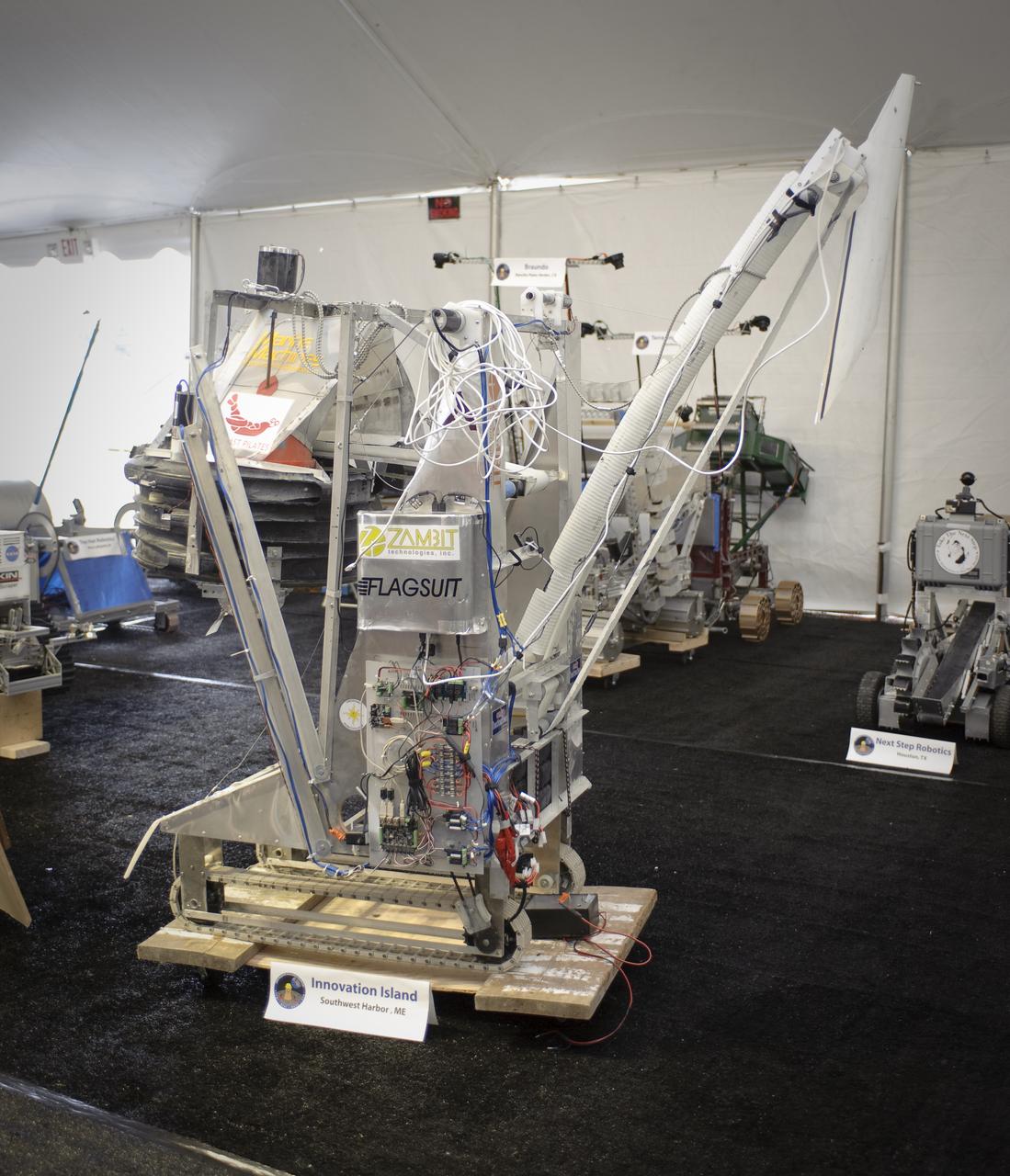
NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA
NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA
NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA
NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

NASA Hosts National Lunar Robotics Excavation Competition '2009 Regolith Excavation Challenge At NASA's Ames Research Center Moffett Field, CA

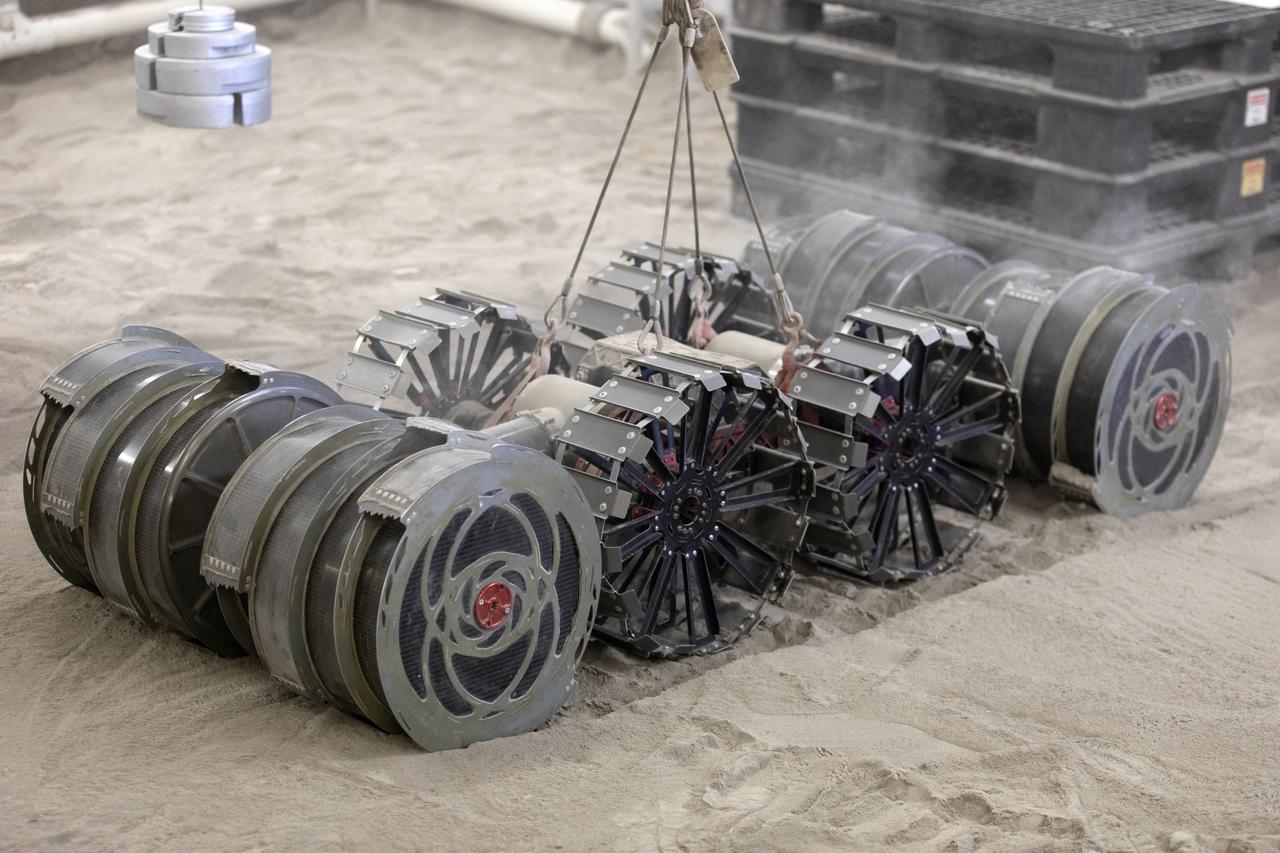
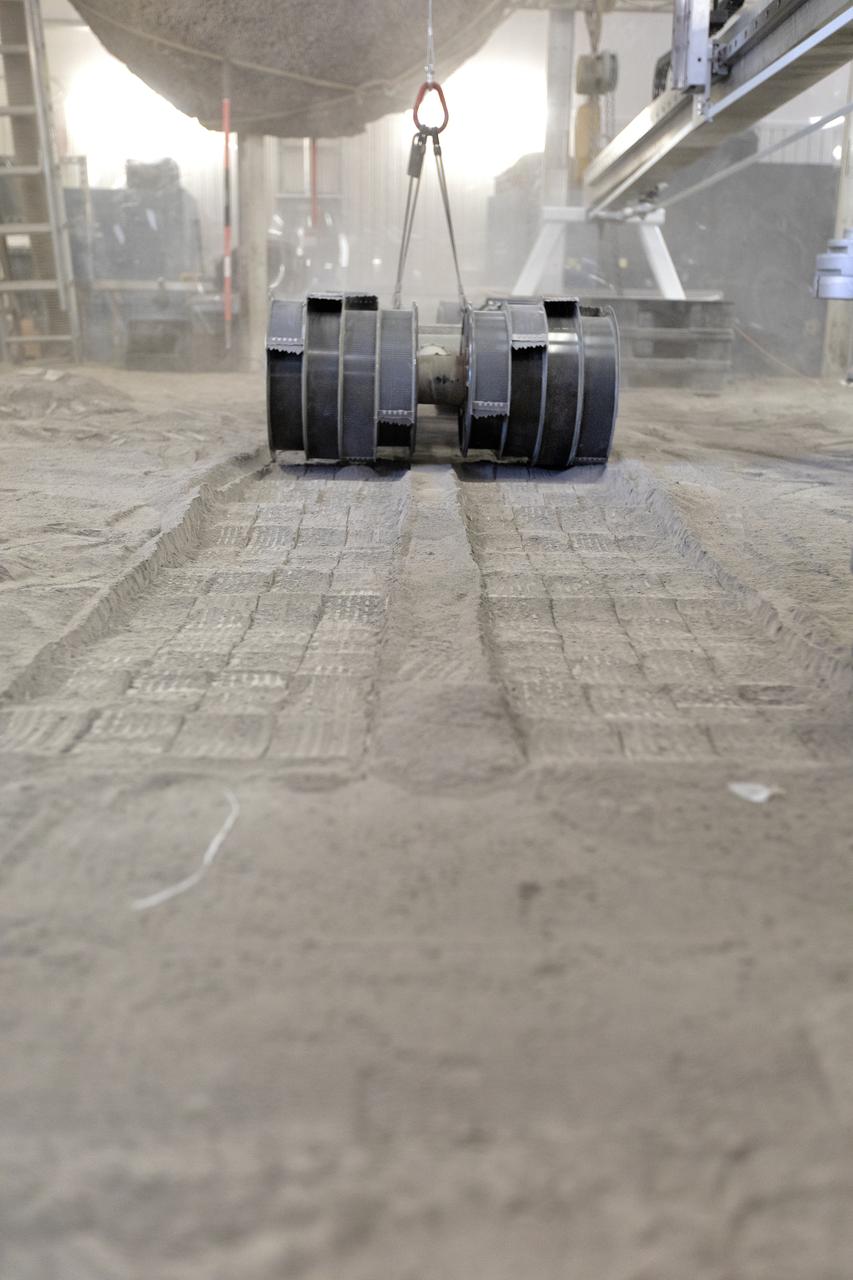
A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

Drew Smith, a robotics engineer, makes adjustments to the Regolith Advanced Surface Systems Operations Robot (RASSOR) during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Smith and other members of the Granular Mechanics and Regolith Operations Lab run tests, which simulates the Moon’s reduced gravity using the gravity assist offload system to see how RASSOR excavates regolith. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

While NASA's InSight spacecraft landed on Mars, thrusters on the bottom of the spacecraft churned up the soil beneath it. This image shows pits that the thrusters excavated. This image was taken Dec. 14, 2018, the 18th Martian day, or sol, of the mission, using the Instrument Deployment Camera on InSight's robotic arm. https://photojournal.jpl.nasa.gov/catalog/PIA23250

AJ Nick, a robotic engineer with the Granular Mechanics and Regolith Operations Lab, monitors the Regolith Advanced Surface Systems Operations Robot (RASSOR) from a control room during testing in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.
A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

A team from the Granular Mechanics and Regolith Operations Lab tests the Regolith Advanced Surface Systems Operations Robot (RASSOR) in the regolith bin inside Swamp Works at NASA’s Kennedy Space Center in Florida on June 5, 2019. Tests use a gravity assist offload system to simulate reduced gravity conditions found on the Moon. On the surface of the Moon, mining robots like RASSOR will excavate the regolith and take the material to a processing plant where usable elements such as hydrogen, oxygen and water can be extracted for life support systems. RASSOR can scoop up icy regolith which can be used to make operations on the Moon sustainable.

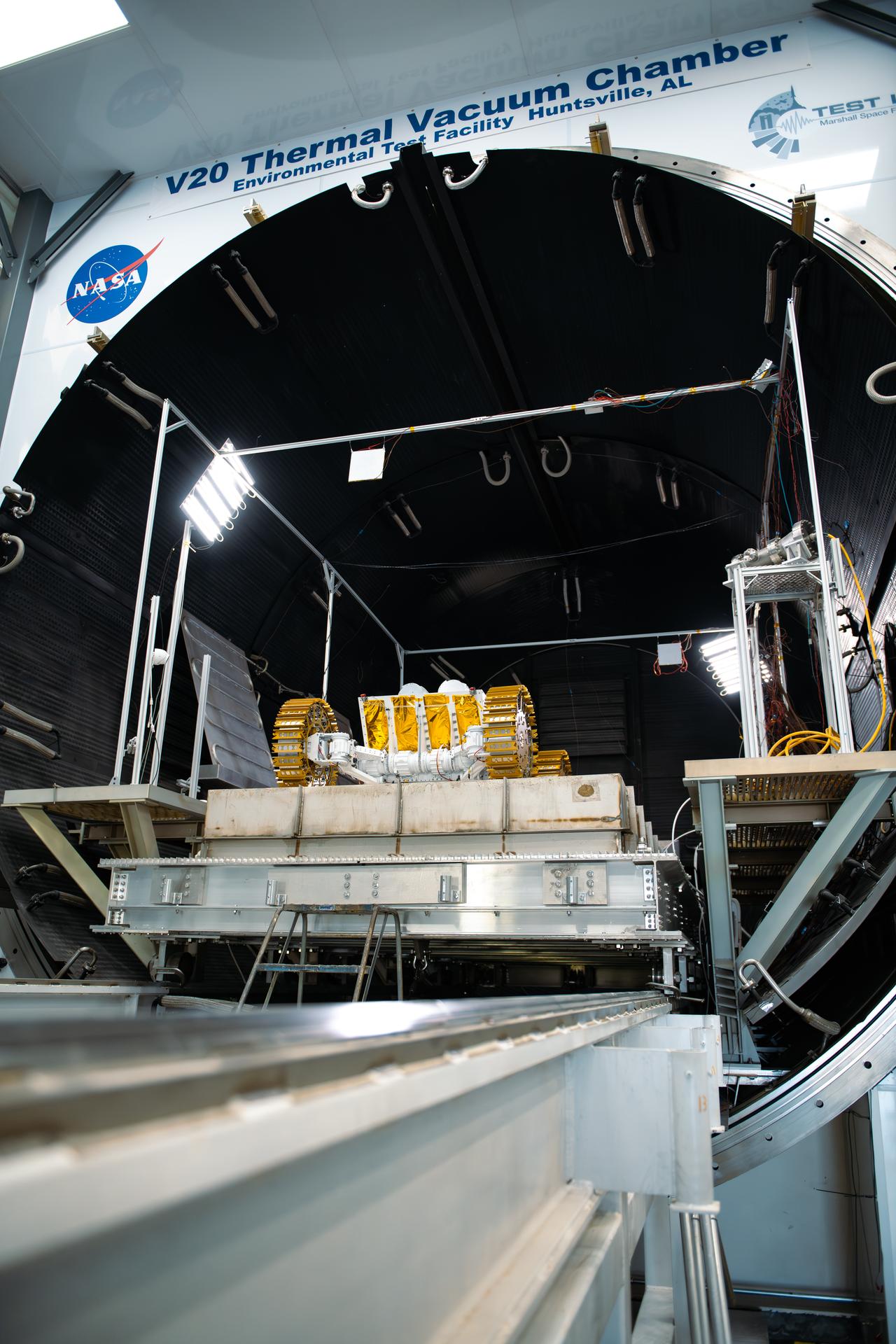
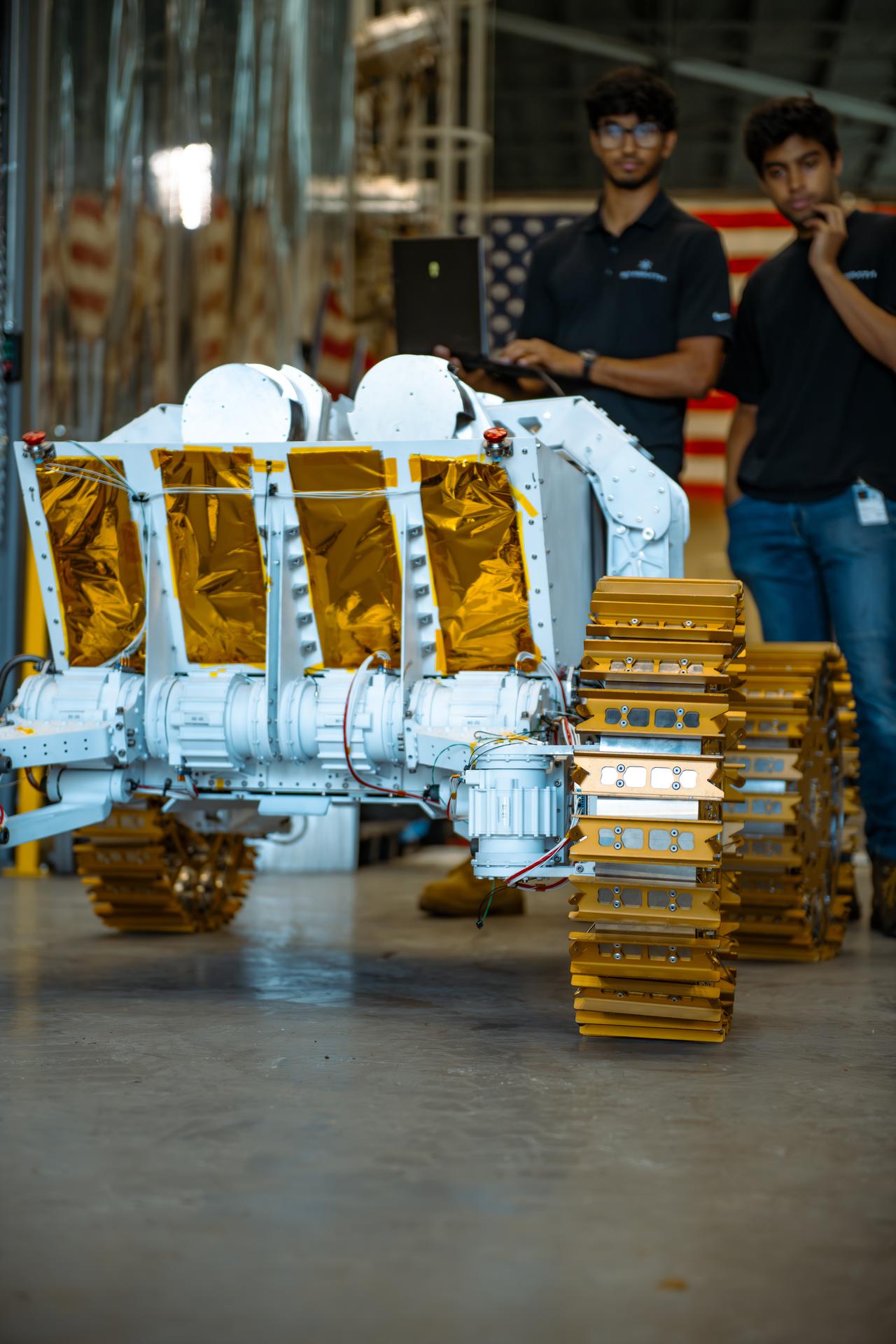
Employees from Environmental Test Facility at NASA’s Marshall Space Flight Center in Huntsville, Alabama, work with the Starpath team on July 30, 2025, to carefully maneuver the rover onto a platform that will slide the rover into the chamber. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. Their visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. The competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.

Starpath’s rover sits on a concrete slab that will be used to mimic the rugged lunar surface within a vacuum chamber at NASA’s Marshall Space Flight Center in Huntsville, Alabama, on July 30, 2025. The slab features a sandy, rocky terrain, and lamps within the chamber will turn on and off to simulate sunlight. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034

On July 30, 2025, members of the Starpath team discuss what final preparations need to be made before the chamber is closed for testing of their rover at NASA’s Marshall Space Flight Center in Huntsville, Alabama. The technology startup headquartered in Hawthorne, California, won second place overall at the Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.

NASA test engineers with the Environmental Test Facility at NASA’s Marshall Space Flight Center situate the rover over the concrete slab that it will operate on before removing the suspension straps that lifted it onto the platform. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.

Starpath mechanical engineer Josh Kavilaveettil monitors a component of the rover, attached to wires, in preparation for testing at NASA’s Marshall Space Flight Center in Huntsville, Alabama on July 30, 2025. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.
Starpath’s rover sits atop a concrete slab at the mouth of the thermal vacuum chamber, ready to be closed in and commence testing at NASA’s Marshall Space Flight Center in Huntsville, Alabama, on July 30, 2025. The technology startup headquartered in Hawthorne, California, won second place overall at the Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.
Members of the small business Starpath remotely operate the rover and run data in preparation for its entrance to the V20 Thermal Vacuum Chamber at NASA’s Marshall Space Flight Center in Huntsville, Alabama, on July 30, 2025. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. Their visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. The competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.

Starpath’s rover freely rests on a concrete slab at the end of a platform at NASA’s Marshall Space Flight Center in Huntsville, Alabama. The large metal structure will slide into the chamber, bringing the rover and concrete slab with it. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.
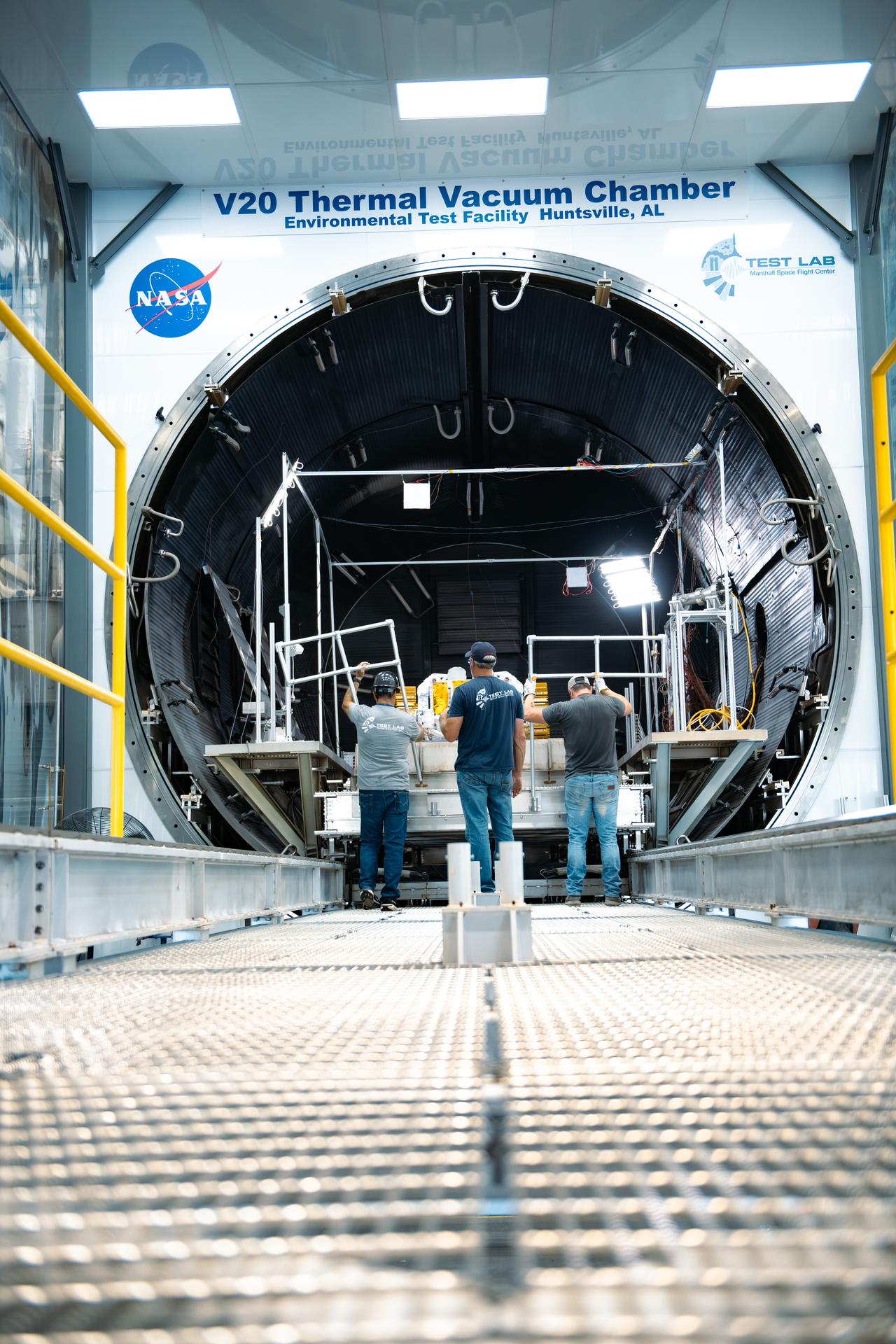
NASA Environmental Test Facility employees at the agency’s Marshall Space Flight Center in Huntsville, Alabama, work with members from the Starpath team to push the sliding platform into the thermal vacuum chamber, with the heavy rover and concrete slab in tow. The technology startup headquartered in Hawthorne, California, won second place overall at the agency’s Break the Ice Lunar Challenge’s live demonstration and finale in June 2024. This competition, one of NASA’s Centennial Challenges, tasked competitors to design, build, and demonstrate robotic technologies that could excavate and transport the icy, rocky dirt – otherwise known as regolith – found on the Moon. Starpath’s visit to NASA Marshall was part of their prize opportunity to test their upgraded lunar regolith excavation and transportation rover in the center’s 20-foot thermal vacuum chamber. For more information, contact NASA Marshall’s Office of Communications at 256-544-0034.

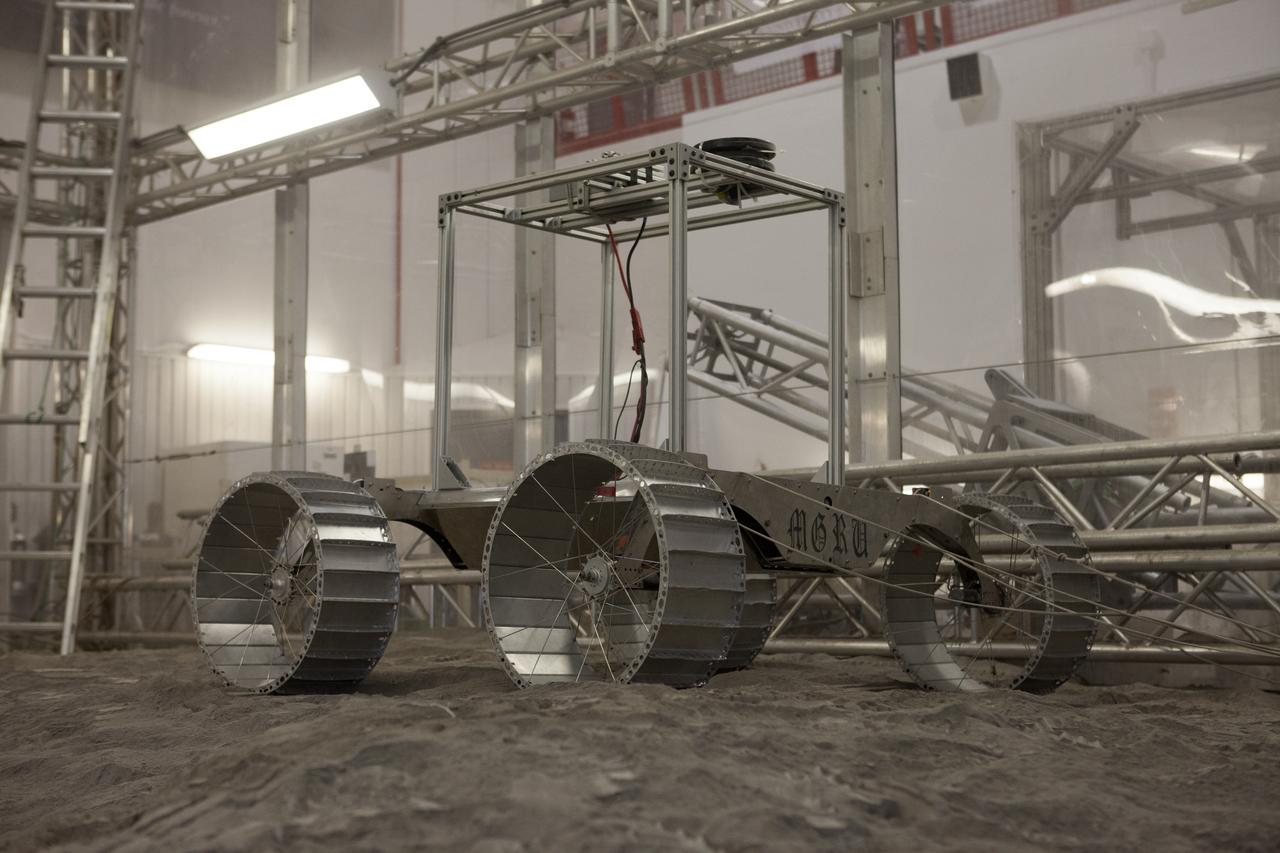
A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

Ben Burdess, mechanical engineer, observes NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

Outside a regolith bin at the agency's Kennedy Space center in Florida, an engineer operates controls for a lightweight simulator version of NASA's Resource Prospector during a mobility test. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

Engineers wearing protecting garb, make adjustments to a lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

CAPE CANAVERAL, Fla. – A videogame simulates driving excavators during NASA's Lunabotics Mining Competition at the Kennedy Space Center Visitor Complex in Florida. The competition challenges university students to build machines that can collect soil such as the material found on the moon. Working inside the Caterpillar LunArena, the robotic craft dig soil that simulates lunar material. The event is judged by a machine's abilities to collect the soil, its design and operation, size, dust tolerance and its level of autonomy. Photo credit: NASA/Glenn Benson

A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

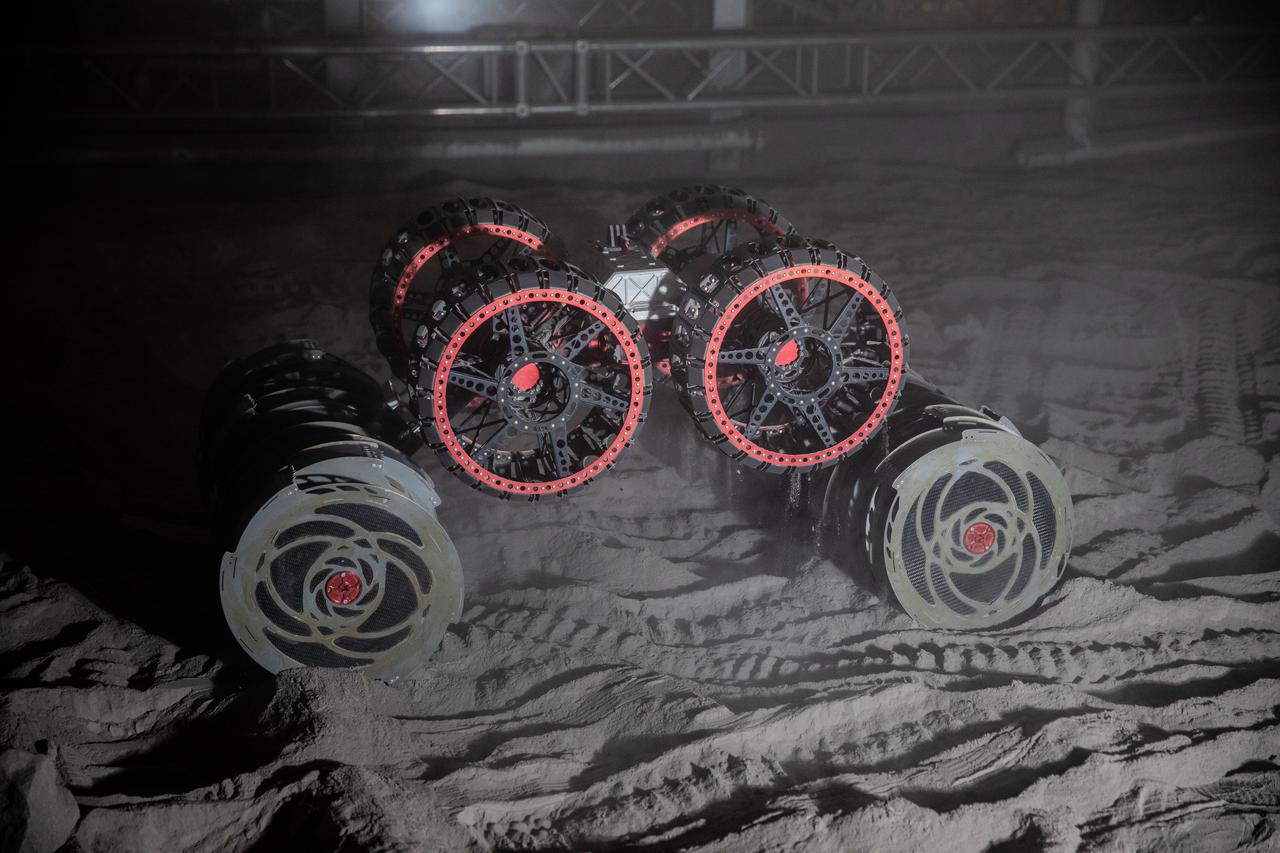
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
A lightweight simulator version of NASA's Resource Prospector undergoes a mobility test in a regolith bin at the agency's Kennedy Space center in Florida. The Resource Prospector mission aims to be the first mining expedition on another world. Operating on the moon’s poles, the robot is designed to use instruments to locate elements at a lunar polar regions, then excavate and sample resources such as hydrogen, oxygen and water. These resources could support human explores on their way to destinations such as farther into the solar system.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.
NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot) conducts excavation testing of simulated regolith, or lunar dust found on the Moon’s surface, inside of the Granular Mechanics and Regolith Operations Lab at the agency’s Kennedy Space Center in Florida on Tuesday, May 27, 2025. RASSOR is designed to work in low-gravity situations, using counter rotating bucket drums on each arm to collect and dump regolith for the extraction of hydrogen, oxygen, or water, resources critical for sustaining a habitable presence.

CAPE CANAVERAL, Fla. -- NASA's Regolith Advanced Surface Systems Operations Robot, or RASSOR, is ready to demonstrate its unique skills during a media tour of the Granular Mechanics and Regolith Operations, or GMRO, Lab in the Swamp Works at NASA's Kennedy Space Center in Florida. RASSOR, lunar soil excavator, resembles a small tank chassis with a drum at either end, each attached with arms. The drums, one of the robot's most innovative feature, are mounted on moving arms, allowing the robot to step and climb over obstacles. Kennedy's Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy's research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Frankie Martin

This artist's rendering illustrates a conceptual design for a potential future mission to land a robotic probe on the surface of Jupiter's moon Europa. The lander is shown with a sampling arm extended, having previously excavated a small area on the surface. The circular dish on top is a dual-purpose high-gain antenna and camera mast, with stereo imaging cameras mounted on the back of the antenna. Three vertical shapes located around the top center of the lander are attachment points for cables that would lower the rover from a sky crane, which is envisioned as the landing system for this mission concept. http://photojournal.jpl.nasa.gov/catalog/PIA21048

CAPE CANAVERAL, Fla. – At NASA’s Kennedy Space Center in Florida, Robert Lightfoot, NASA associate director, learns about the Regolith Advanced Surface Systems Operations Robot, or RASSOR, Excavator during a tour of the Swamp Works laboratories. Kennedy’s Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy’s research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Jim Grossmann

CAPE CANAVERAL, Fla. -- Dr. Phil Metzger, at right, a principal investigator in the Surface Systems Office, discusses some of NASA's cutting-edge projects with media representatives touring the Granular Mechanics and Regolith Operations, or GMRO, Lab in the Swamp Works at NASA's Kennedy Space Center in Florida. The GMRO team develops robotics to excavate regolith and ice as resources and to prepare berms, roads and landing pads. The laboratory also studies the physics of blowing rego¬lith and other materials in a rocket exhaust plume to predict and mitigate the blast effects of launches and landings. The team performed a demonstration of the Regolith Advanced Surface Systems Operations Robot, or RASSOR, for the media. Kennedy's Swamp Works provides rapid, innovative and cost-effective exploration mission solutions, leveraging partnerships across NASA, industry and academia. Kennedy's research and technology mission is to improve spaceports on Earth, as well as lay the groundwork for establishing spaceports at destinations in space. For more information, visit http:__www.nasa.gov_centers_kennedy_exploration_researchtech_index.html. Photo credit: NASA_Frankie Martin

This relatively bright outcropping of rock, dubbed "Gasconade," was investigated by NASA's Mars Exploration Rover Opportunity while the rover was perched on "Spirit Mound" at the western edge of Mars' Endeavour Crater. This mosaic combines four frames taken by the microscopic imager on Opportunity's robotic arm on Oct. 2, 2016, during the 4,512st Martian day, or sol, of the rover's work on Mars. Enhanced color information from Opportunity's panoramic camera has been added to emphasize differences in the materials visible in the target. Figure A is a version with no color information added to the microscopic imager mosaic. The view covers an area about 2 inches (5 centimeters) wide. Opportunity's inspection found Gasconade to be a wind-etched outcrop with angular bits of darker rock within a lighter matrix, which may have been formed from fallout of the impact event that excavated the crater. This location of Spirit Mound, shown at PIA20854, is the deeper on the western rim of Endeavour Crater than any site visited previously by Opportunity. http://photojournal.jpl.nasa.gov/catalog/PIA21141
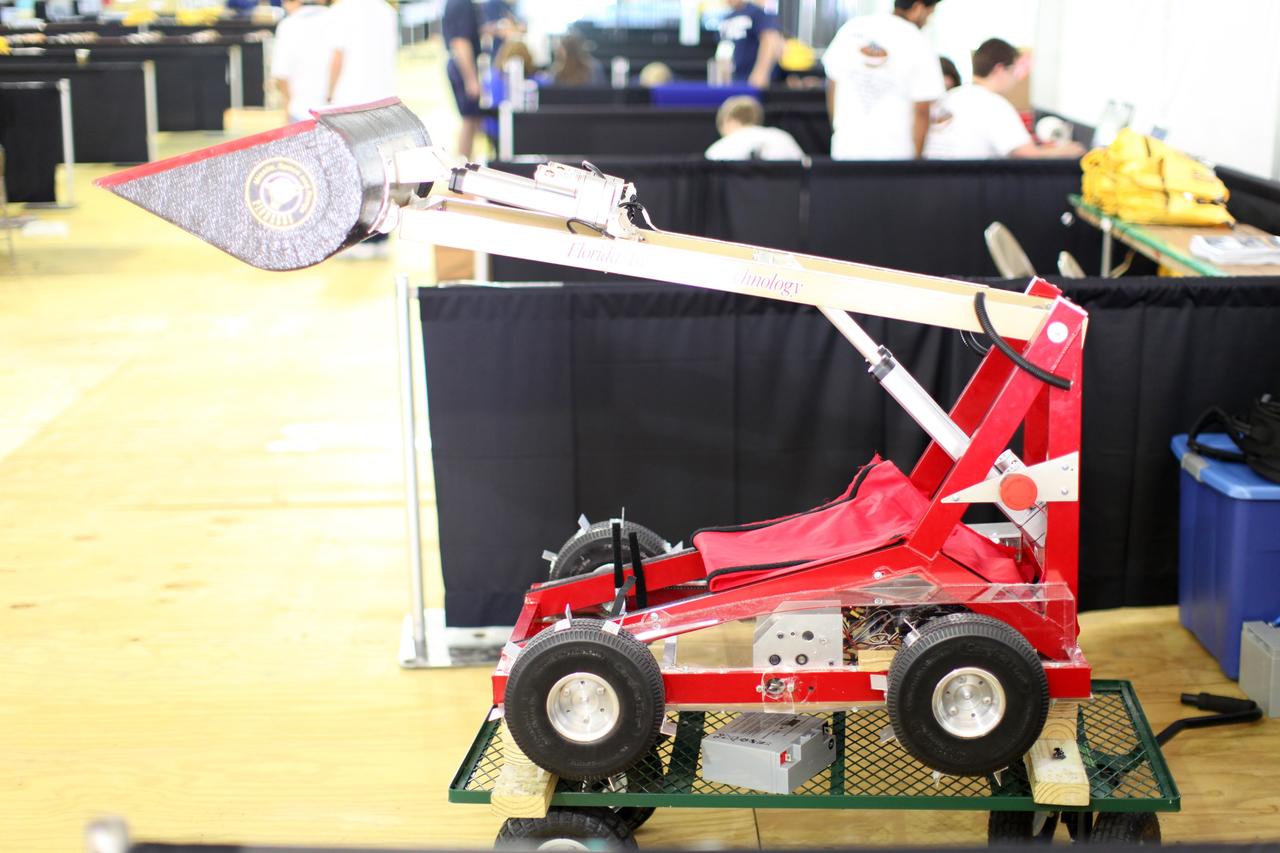
CAPE CANAVERAL, Fla. – A colorful lunabot built by the students from the Florida Institute of Technology, in Melbourne, Fla., is prepared for the “smackdown” coming during the third annual Lunabotics Mining Competition at NASA’s Kennedy Space Center Visitor Complex in Florida. More than 50 teams of undergraduate and graduate students from eight countries are participating. The teams have designed and built remote-controlled or autonomous robots that can excavate simulated lunar soil. During the competition, the teams' designs, known as lunabots, will go head-to-head to determine whose machine can collect and deposit the most simulated moon dust within a specified amount of time. The competition is a NASA Human Exploration and Operations Mission Directorate project designed to engage and retain students in the science, technology, engineering and mathematics, or STEM, fields of study. The project provides a competitive environment that may result in innovative ideas and solutions that potentially could be applied to future NASA missions. For more information, visit http://www.nasa.gov/lunabotics. Photo credit: NASA/Frankie Martin

CAPE CANAVERAL, Fla. – “Snoopy” catches a ride aboard the lunabot built by the students from Embry-Riddle Aeronautical University, in Daytona Beach, Fla., during a practice session for the third annual Lunabotics Mining Competition at NASA’s Kennedy Space Center Visitor Complex in Florida. More than 50 teams of undergraduate and graduate students from eight countries are participating. The teams have designed and built remote-controlled or autonomous robots that can excavate simulated lunar soil. During the competition, the teams' designs, known as lunabots, will go head-to-head to determine whose machine can collect and deposit the most simulated moon dust within a specified amount of time. The competition is a NASA Human Exploration and Operations Mission Directorate project designed to engage and retain students in the science, technology, engineering and mathematics, or STEM, fields of study. The project provides a competitive environment that may result in innovative ideas and solutions that potentially could be applied to future NASA missions. For more information, visit http://www.nasa.gov/lunabotics. Photo credit: NASA/Frankie Martin

CAPE CANAVERAL, Fla. – Practice sessions get under way for the third annual Lunabotics Mining Competition at the Rocket Garden at NASA’s Kennedy Space Center Visitor Complex in Florida. More than 50 teams of undergraduate and graduate students from eight countries are participating. The teams have designed and built remote-controlled or autonomous robots that can excavate simulated lunar soil. During the competition, the teams' designs, known as lunabots, will go head-to-head to determine whose machine can collect and deposit the most simulated moon dust within a specified amount of time. The competition is a NASA Human Exploration and Operations Mission Directorate project designed to engage and retain students in the science, technology, engineering and mathematics, or STEM, fields of study. The project provides a competitive environment that may result in innovative ideas and solutions that potentially could be applied to future NASA missions. For more information, visit http://www.nasa.gov/lunabotics. Photo credit: NASA/Frankie Martin
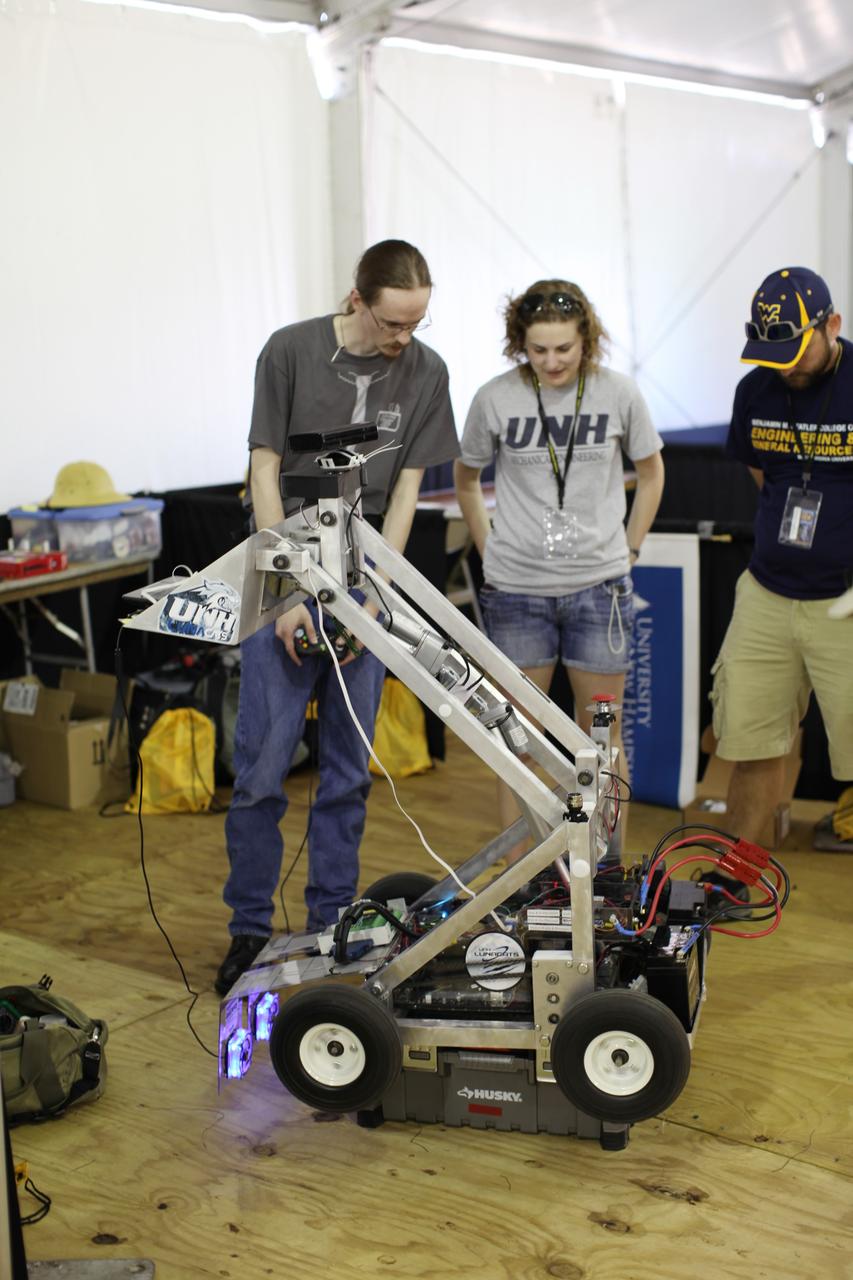
CAPE CANAVERAL, Fla. – Students from the University of New Hampshire, in Durham, N.H., put their lunabot through its paces during a practice session for the third annual Lunabotics Mining Competition at NASA’s Kennedy Space Center Visitor Complex in Florida. More than 50 teams of undergraduate and graduate students from eight countries are participating. The teams have designed and built remote-controlled or autonomous robots that can excavate simulated lunar soil. During the competition, the teams' designs, known as lunabots, will go head-to-head to determine whose machine can collect and deposit the most simulated moon dust within a specified amount of time. The competition is a NASA Human Exploration and Operations Mission Directorate project designed to engage and retain students in the science, technology, engineering and mathematics, or STEM, fields of study. The project provides a competitive environment that may result in innovative ideas and solutions that potentially could be applied to future NASA missions. For more information, visit http://www.nasa.gov/lunabotics. Photo credit: NASA/Frankie Martin

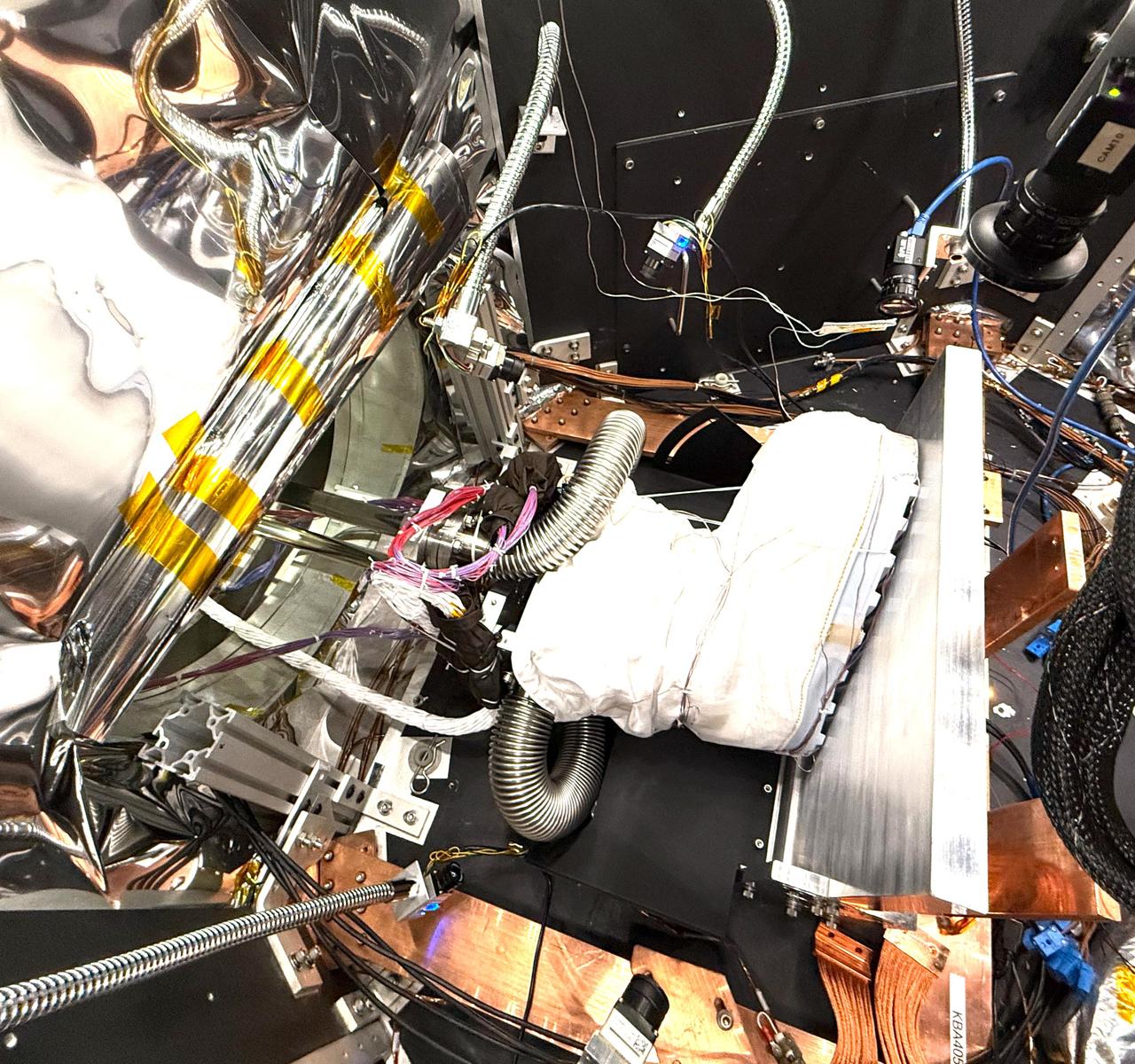
Robotics technologist Brendan Chamberlain-Simon, left, of NASA's Jet Propulsion Laboratory and spacesuit engineer Zach Fester of the agency's Johnson Space Center adjust a thermal vacuum chamber called CITADEL at JPL on Nov. 12, 2024, before testing an astronaut boot inside the chamber. Built to prepare potential robotic explorers for the frosty, low-pressure conditions on ocean worlds like Jupiter's frozen moon Europa, CITADEL (Cryogenic Ice Testing, Acquisition Development, and Excavation Laboratory) has also proven key to evaluating how astronaut gloves and boots hold up in extraordinary cold. It can reach temperatures as low as low as minus 370 degrees Fahrenheit (minus 223 degrees Celsius), approximating extreme conditions Artemis III astronauts will confront in permanently shadowed regions of the lunar South Pole. The boot testing was initiated by the Extravehicular Activity and Human Surface Mobility Program at NASA Johnson and took place from October 2024 to January 2025. The boot is part of a NASA spacesuit called the Exploration Extravehicular Mobility Unit, or xEMU. Test results haven't yet been fully analyzed. In addition to spotting vulnerabilities with existing suits, the experiments are intended to help NASA develop this unique test capability and prepare criteria for standardized, repeatable, and inexpensive test methods for the next-generation lunar suit being built by Axiom Space. https://photojournal.jpl.nasa.gov/catalog/PIA26593

Spacesuit engineer Shane McFarland, left, of the Advanced Suit Team at NASA's Johnson Space Center prepares an astronaut glove for thermal vacuum testing inside a chamber at the agency's Jet Propulsion Laboratory in Southern California on Nov. 1, 2023. Tim Brady of the NASA Engineering and Safety Center (NESC), which spearheaded the glove testing campaign, looks on as McFarland positions the glove in a load lock – one of four small drawer-like chambers through which test materials are inserted into the larger main chamber of a facility called CITADEL (Cryogenic Ice Testing, Acquisition Development, and Excavation Laboratory). The glove was tested at vacuum and temperatures as low as minus 352 degrees Fahrenheit (minus 213 degrees Celsius) – temperatures as frigid as those Artemis III astronauts could experience on the Moon's South Pole. Built to prepare potential future robotic spacecraft for the frosty, low-pressure conditions on ocean worlds like Jupiter's frozen moon Europa, CITADEL has also proven key to evaluating how astronaut gloves and boots hold up in extraordinary cold. The NASA Engineering and Safety Center spearheaded a glove testing campaign in CITADEL from October 2023 to March 2024. Part of a spacesuit design called the Extravehicular Mobility Unit, the gloves tested in the chamber are the sixth version of a glove NASA began using in the 1980s. The testing in CITADEL showed that the legacy glove would not meet thermal requirements in the more challenging lunar South Pole environment. In addition to spotting vulnerabilities with existing suits, the CITADEL experiments will help NASA develop this unique test capability and prepare criteria for standardized, repeatable, and inexpensive test methods for the next-generation lunar suit being built by Axiom Space. https://photojournal.jpl.nasa.gov/catalog/PIA26591
A boot that's part of a NASA lunar surface spacesuit prototype is readied for testing inside a thermal vacuum chamber called CITADEL at the agency's Jet Propulsion Laboratory in Southern California on Nov. 8, 2024. The thick aluminum plate at right stands in for the frigid surface of the lunar South Pole, where Artemis III astronauts will confront conditions more extreme than any previously experienced by humans. Built to prepare potential future robotic spacecraft for the frosty, low-pressure conditions on ocean worlds like Jupiter's frozen moon Europa, CITADEL (Cryogenic Ice Testing, Acquisition Development, and Excavation Laboratory) has also proven key to evaluating how astronaut gloves and boots hold up in extraordinary cold. It can reach temperatures as low as low as minus 370 degrees Fahrenheit (minus 223 degrees Celsius), approximating conditions in permanently shadowed regions that astronauts will explore. Figure A, showing the outer boot sole, was taken from inside CITADEL on Nov. 13, 2024. The boot is positioned in a load lock, one of four small drawer-like chambers through which test materials are inserted into the larger chamber. Initiated by the Extravehicular Activity and Human Surface Mobility Program at NASA's Johnson Space Center, the boot testing took place from October 2024 to January 2025. The boot is part of a NASA spacesuit called the Exploration Extravehicular Mobility Unit, or xEMU. Results haven't yet been fully analyzed. In addition to spotting vulnerabilities with existing suits, the experiments are intended to help NASA develop this unique test capability and prepare criteria for standardized, repeatable, and inexpensive test methods for the next-generation lunar suit being built by Axiom Space. https://photojournal.jpl.nasa.gov/catalog/PIA26592

An astronaut glove designed for use during spacewalks on the International Space Station is prepared for thermal vacuum testing inside a chamber at NASA's Jet Propulsion Laboratory in Southern California on Nov. 1, 2023. The glove lies in a load lock, one of four small drawer-like chambers through which test materials are inserted into the larger main chamber of a facility called CITADEL (Cryogenic Ice Testing, Acquisition Development, and Excavation Laboratory). The glove was tested at vacuum and temperatures as low as minus 352 degrees Fahrenheit (minus 213 degrees Celsius) – temperatures as frigid as those Artemis III astronauts could experience on the Moon's South Pole. Built to prepare potential future robotic spacecraft for the frosty, low-pressure conditions on ocean worlds like Jupiter's frozen moon Europa, CITADEL has also proven key to evaluating how astronaut gloves and boots hold up in extraordinary cold. The NASA Engineering and Safety Center spearheaded a glove testing campaign in CITADEL from October 2023 to March 2024. Part of a spacesuit design called the Extravehicular Mobility Unit, the gloves tested in the chamber are the sixth version of a glove NASA began using in the 1980s. The testing in CITADEL showed that the legacy glove would not meet thermal requirements in the more challenging lunar South Pole environment. In addition to spotting vulnerabilities with existing suits, the CITADEL experiments will help NASA develop this unique test capability and prepare criteria for standardized, repeatable, and inexpensive test methods for the next-generation lunar suit being built by Axiom Space. https://photojournal.jpl.nasa.gov/catalog/PIA26430