
Telework self-portrait, 2020.

Phoenix Lander Self Portrait on Mars, Vertical Projection

Opportunity Self-Portrait, Sols 322-323
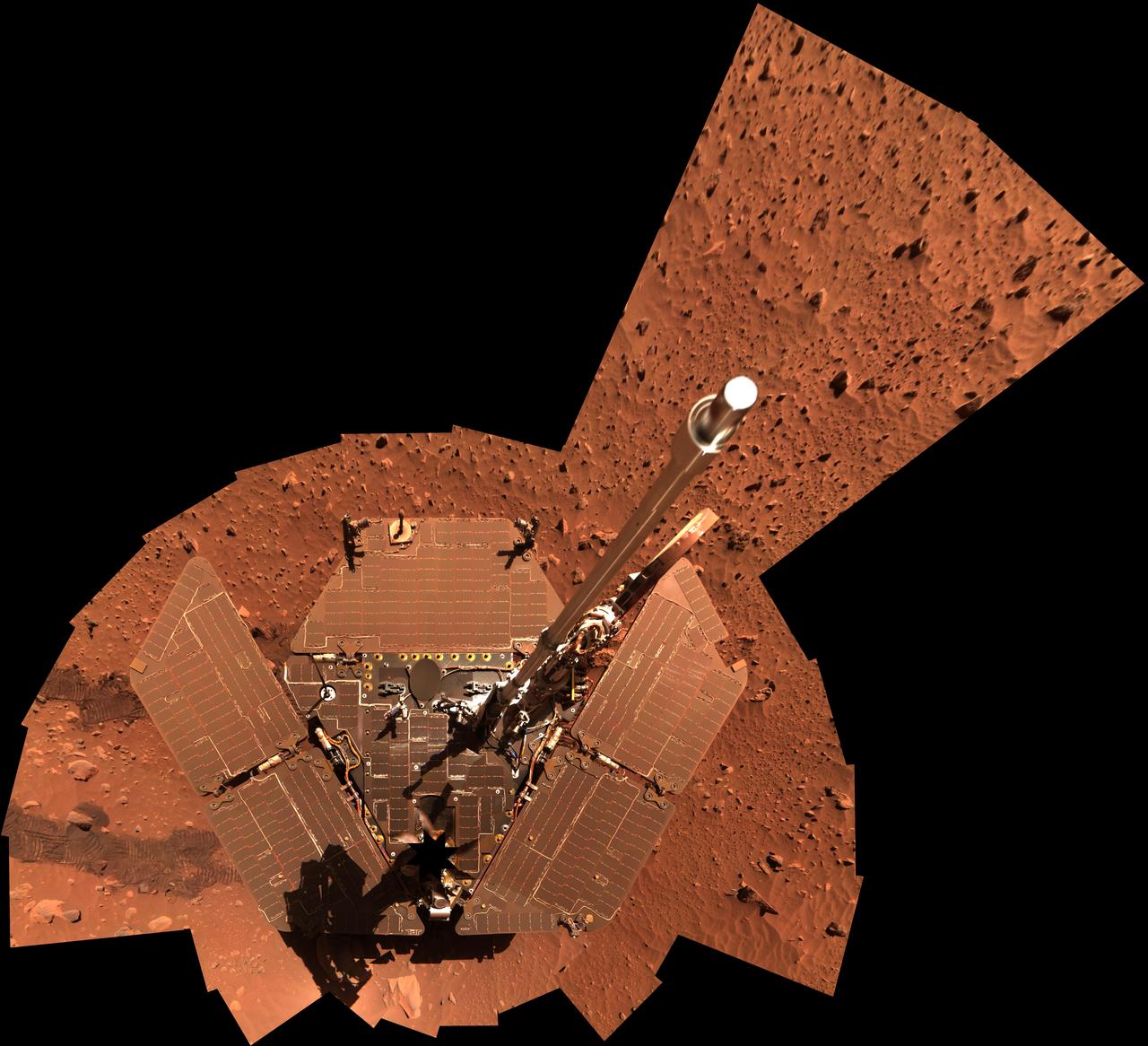
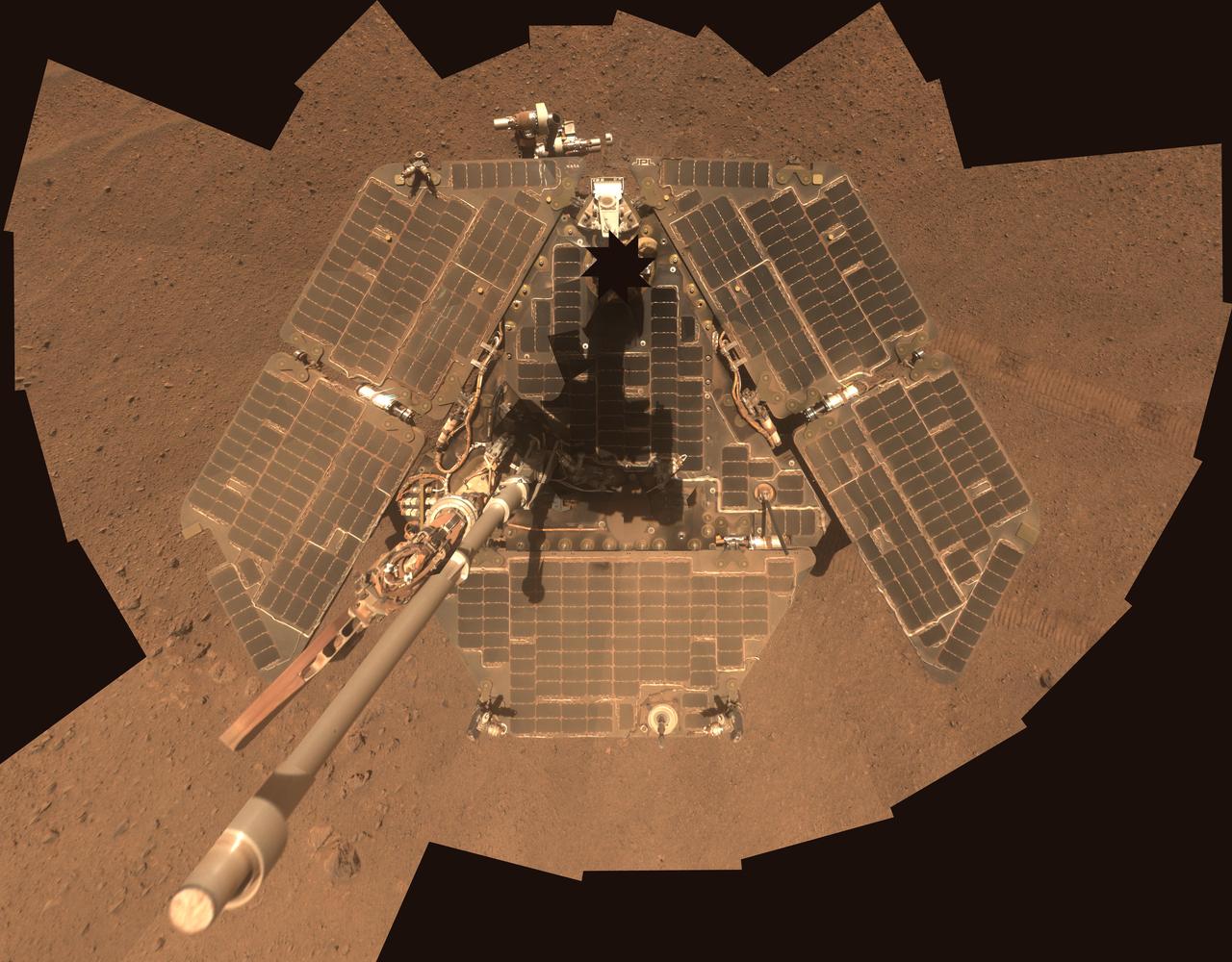
Spirit Self-Portrait, Sols 329-330

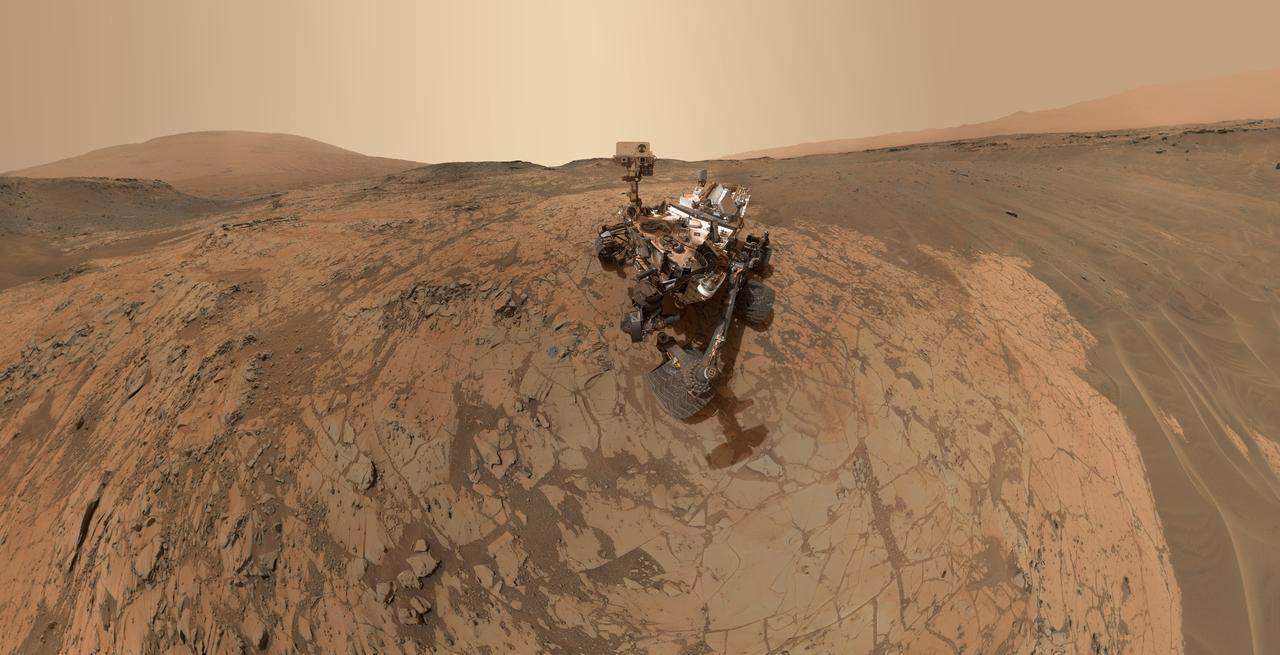
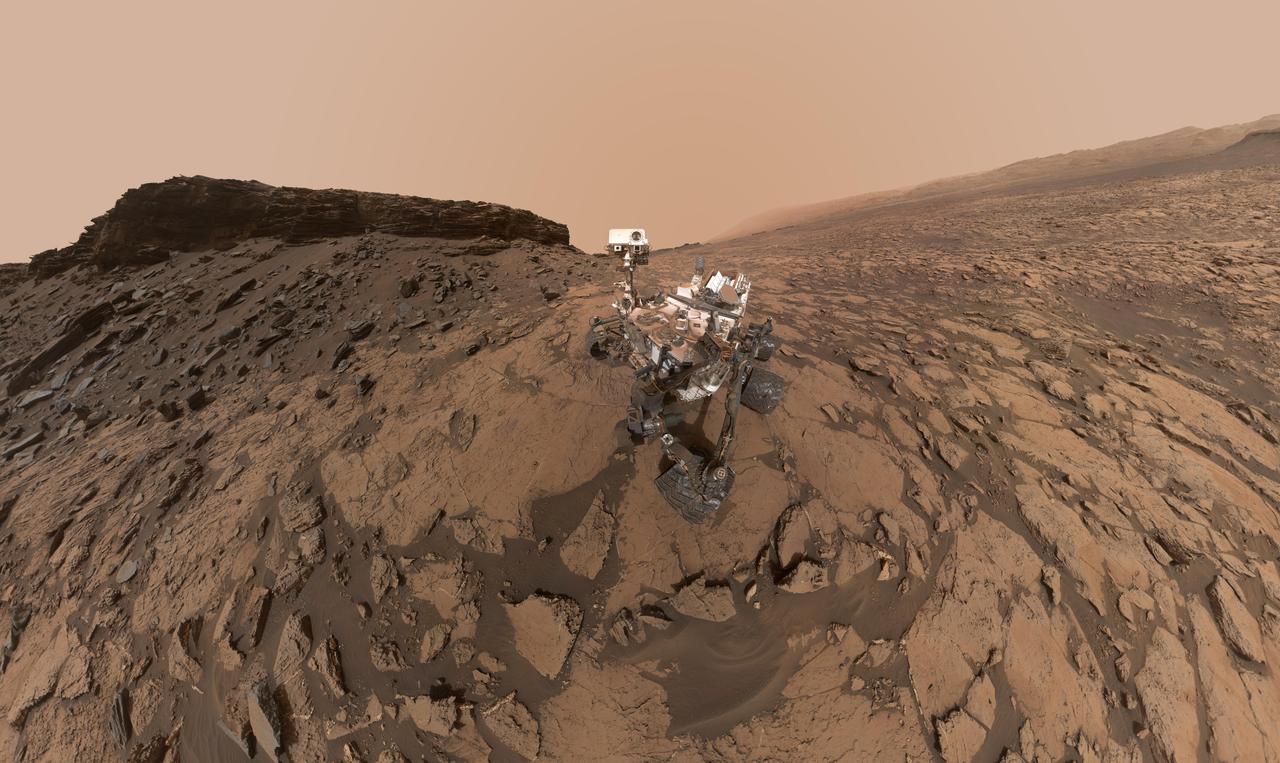
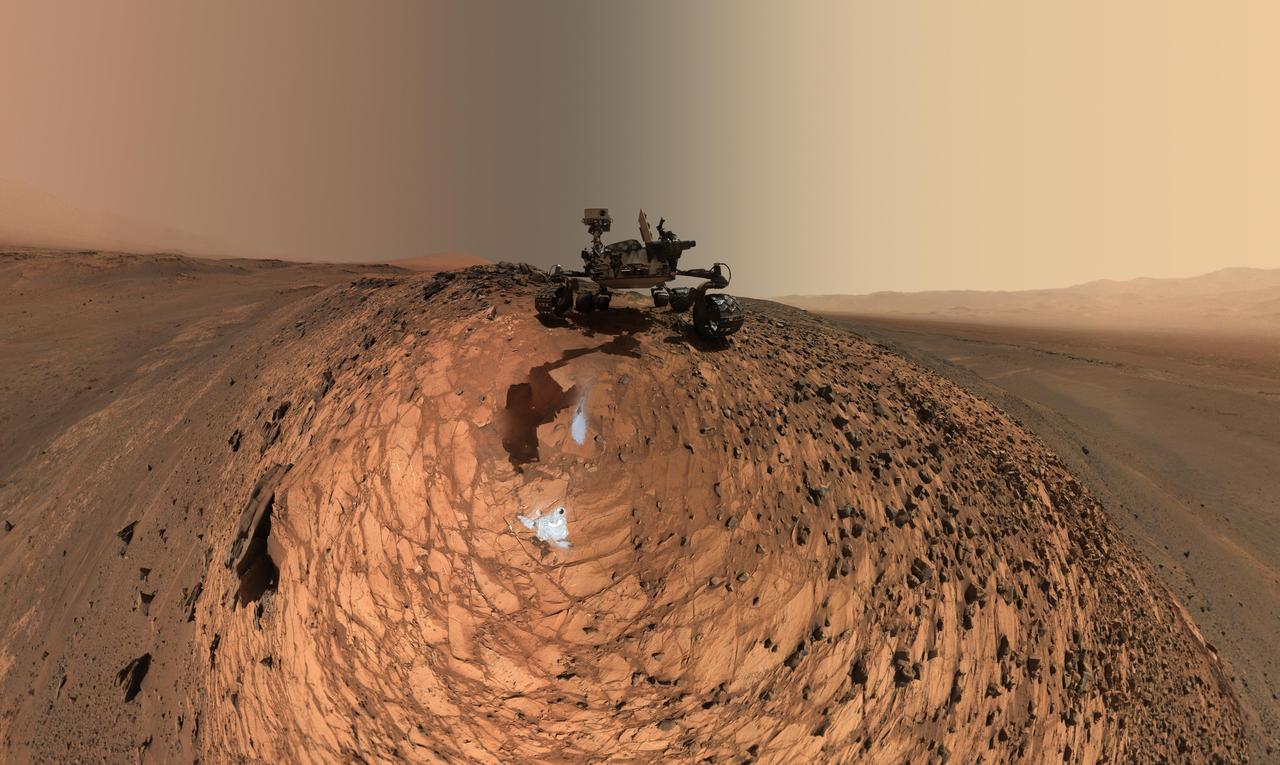
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at a drilled sample site called "Okoruso," on the "Naukluft Plateau" of lower Mount Sharp. The scene combines multiple images taken with the rover's Mars Hand Lens Imager (MAHLI) on May 11, 2016, during the 1,338th Martian day, or sol, of the rover's work on Mars. In front of the rover is the hole, surrounded by grayish drill cuttings, created by using Curiosity's drill to collect sample rock powder at Okoruo, plus a patch of powder dumped onto the ground after delivery of a portion to the rover's internal Chemistry and Mineralogy (CheMin) laboratory instrument. The rover team compared the rock powder from drilling at Okoruso to material from the nearby "Lubango" drilling site, which is visible behind the rover, just to the left of the mast. The Lubango site was selected within a pale zone, or "halo," beside a fracture in the area's sandstone bedrock. Okoruso is in less-altered bedrock farther from any fractures. Note that the Okoruso drill cuttings appear darker than the Lubango drill cuttings. The Lubango sample was found to be enriched in silica and sulfates, relative to Okoruso. To the left of the rover, in this scene, several broken rocks reveal grayish interiors. Here, Curiosity was driven over the rocks in a fracture-associated halo, so that freshly exposed surfaces could be examined with MAHLI, Mast Camera (Mastcam) and Chemistry and Camera (ChemCam) instruments. An upper portion of Mount Sharp is prominent on the horizon. http://photojournal.jpl.nasa.gov/catalog/PIA20602
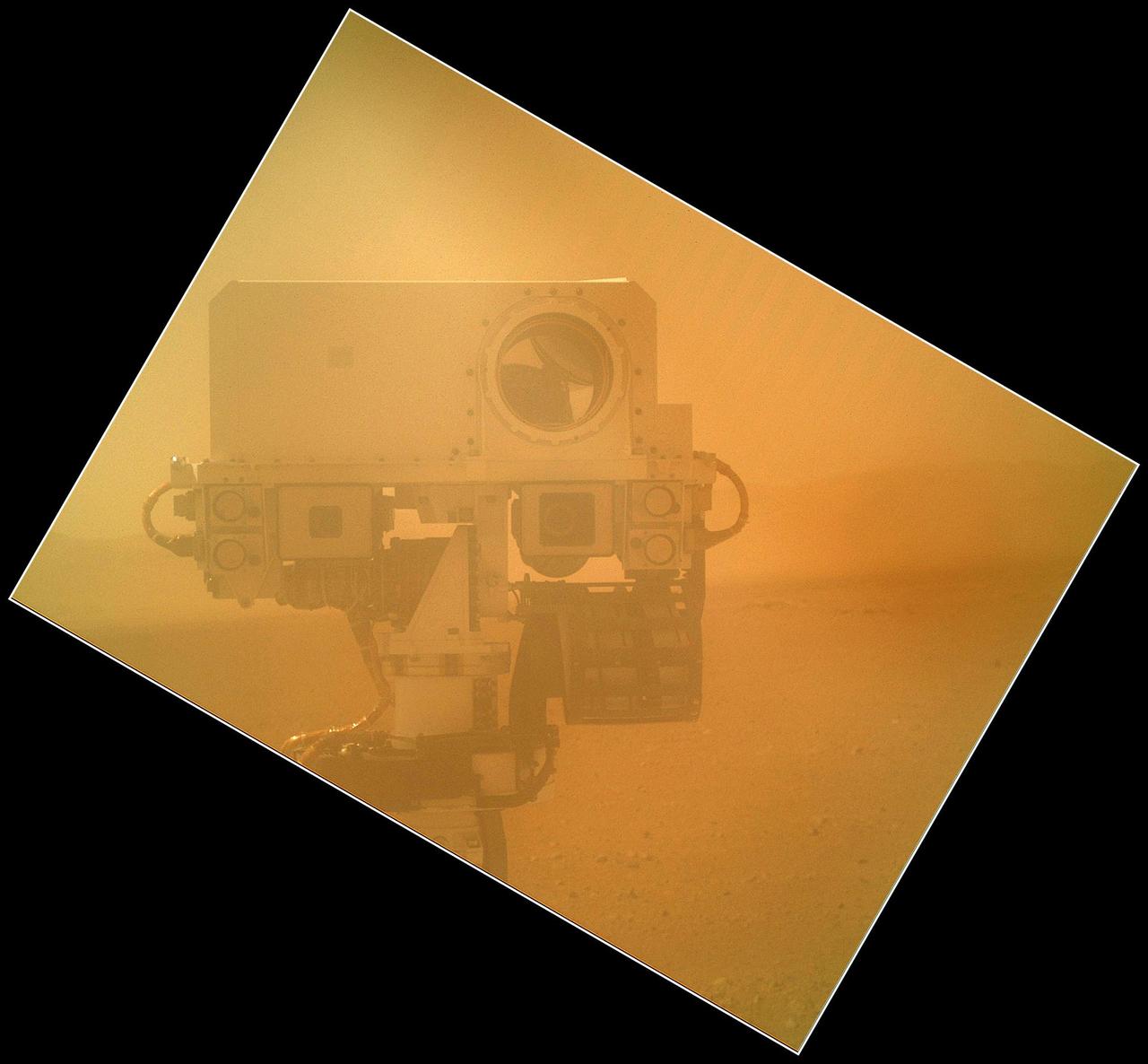
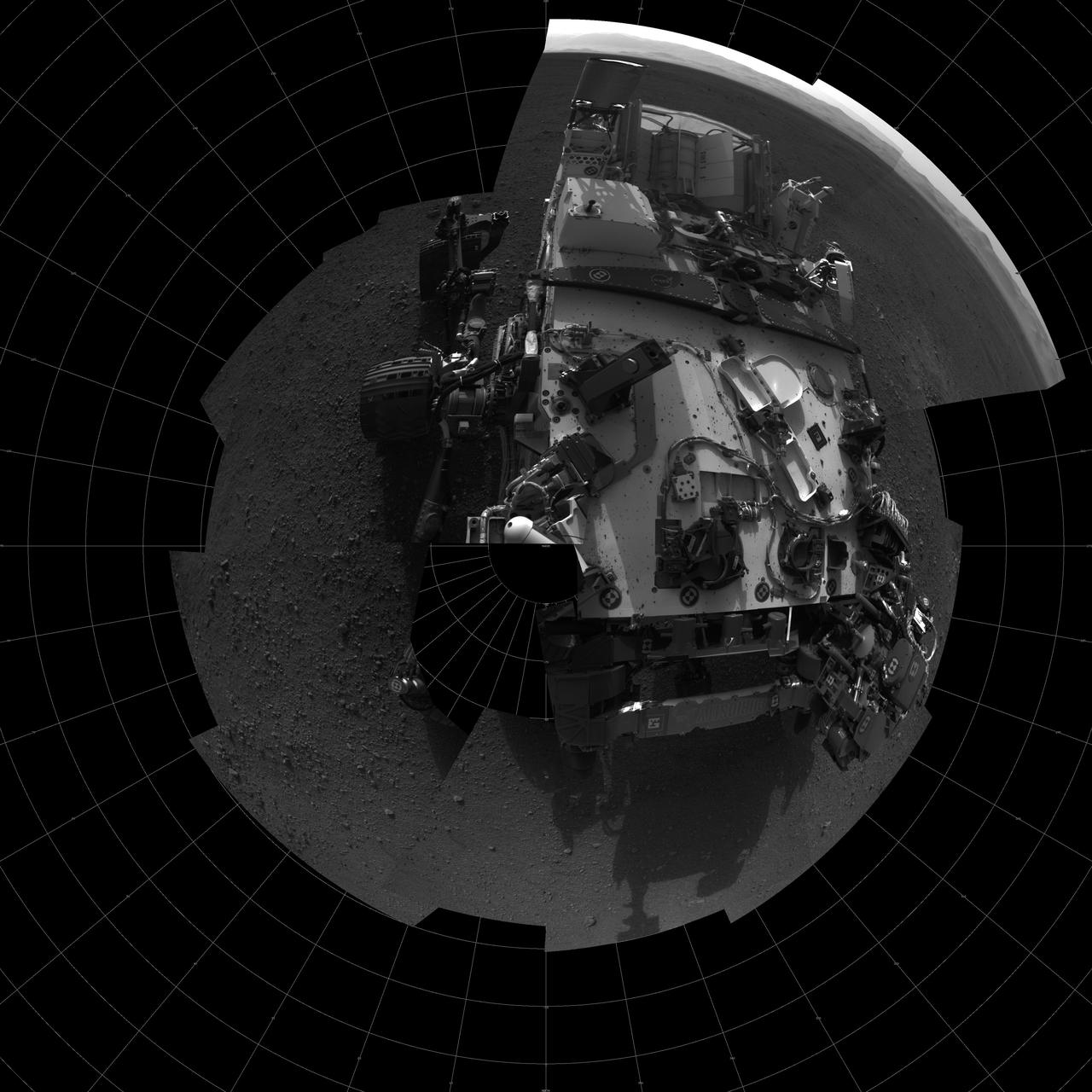
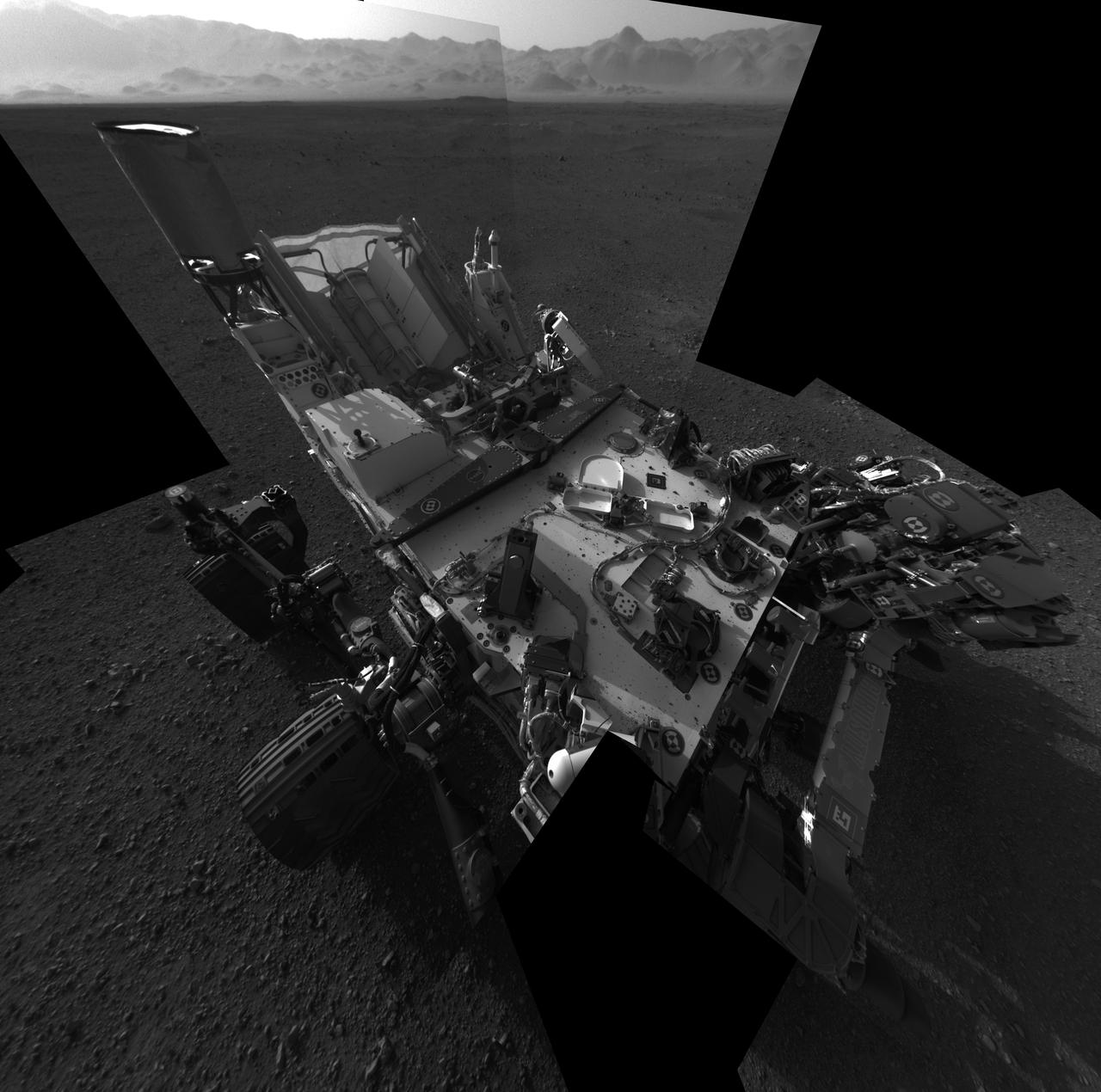
On Sol 32 Sept. 7, 2012 the Curiosity rover used a camera located on its arm to obtain this self portrait. The MAHLI cover was in the closed position in order to inspect the the dust cover.
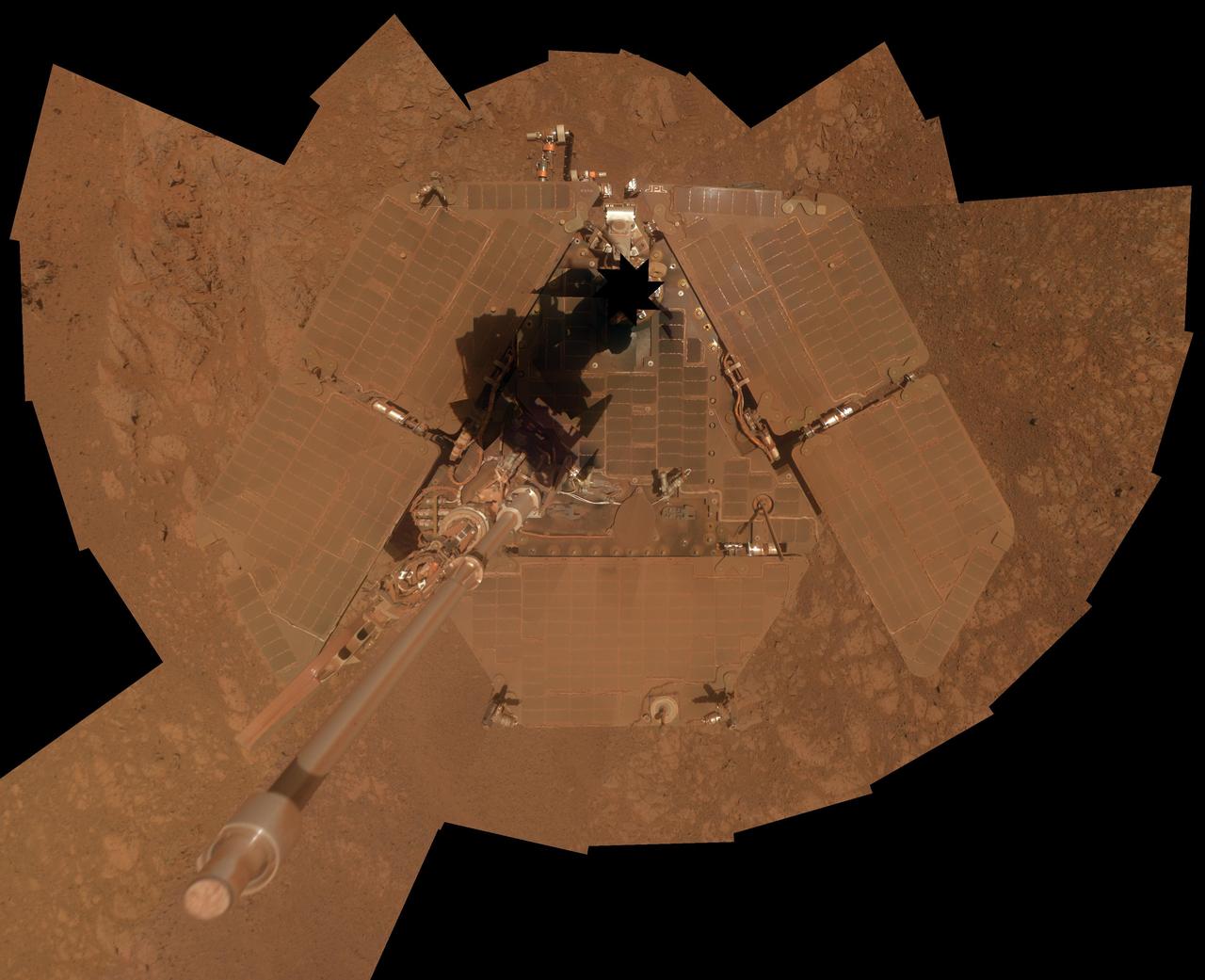
NASA Mars Exploration Rover Opportunity recorded the component images for this self-portrait about three weeks before completing a decade of work on Mars.
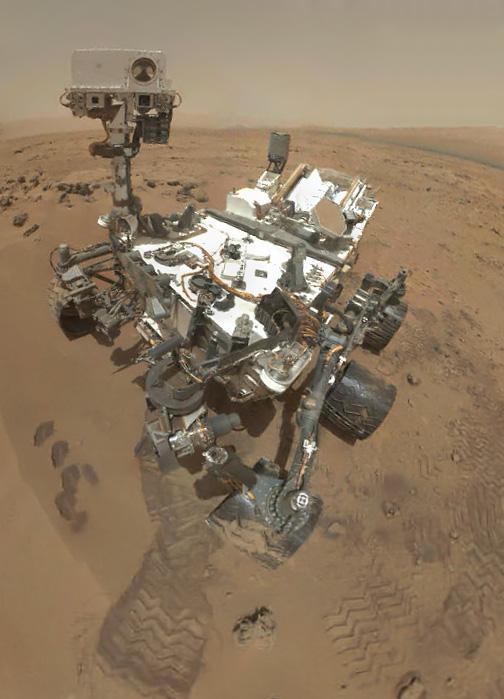
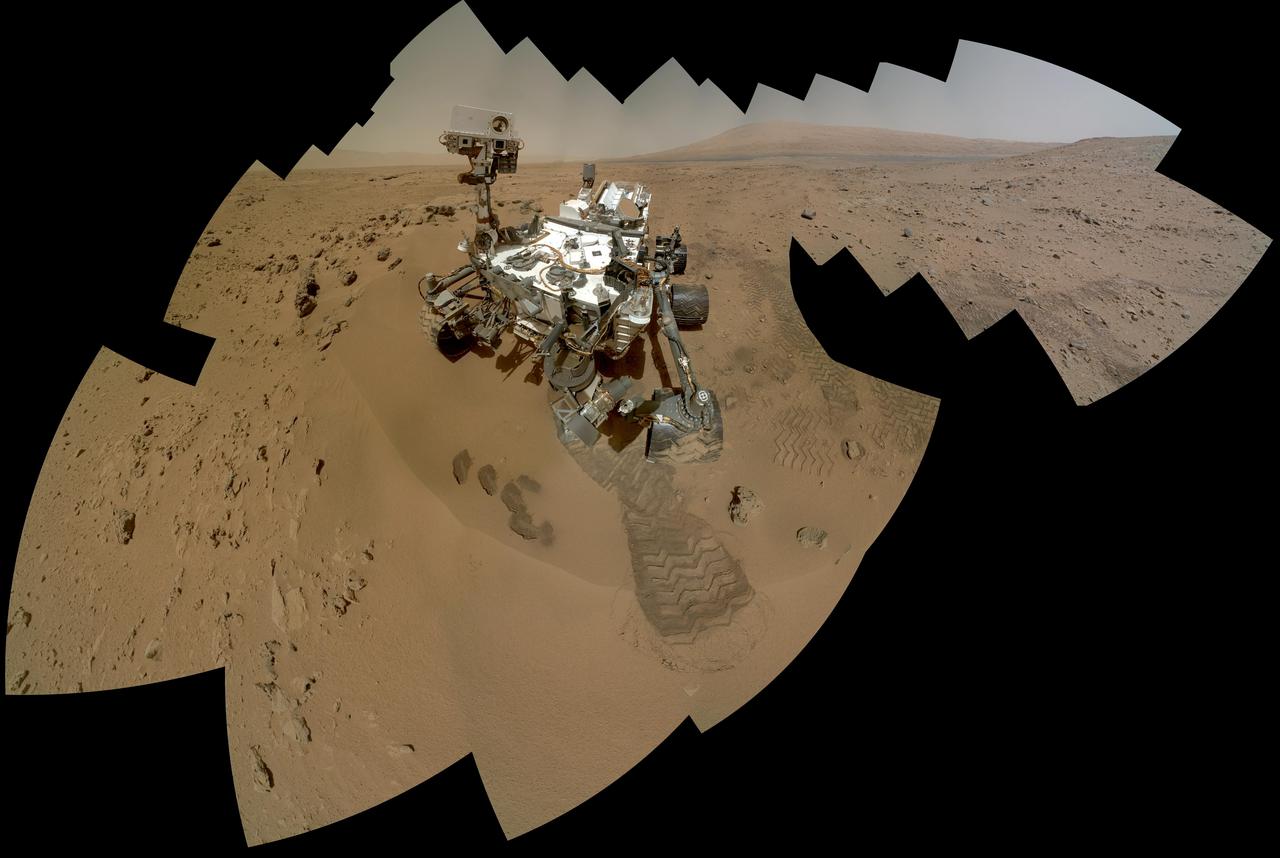
NASA Curiosity rover used the Mars Hand Lens Imager MAHLI to capture the set of thumbnail images stitched together to create this full-color self-portrait.
This self-portrait of NASA Curiosity Mars rover shows the vehicle at the Mojave site, where its drill collected the mission second taste of Mount Sharp.

This self-portrait of NASA Curiosity Mars rover shows the vehicle at a drilled sample site called Okoruso, on the Naukluft Plateau of lower Mount Sharp.

Camera and robotic-arm maneuvers for taking a self-portrait of the NASA Curiosity rover on Mars were checked first, at NASA Jet Propulsion Laboratory in Pasadena, Calif., using the main test rover for the Curiosity.
This Picasso-like self portrait of NASA Curiosity rover was taken by its Navigation cameras, located on the now-upright mast. The camera snapped pictures 360-degrees around the rover, while pointing down at the rover deck, up and straight ahead.
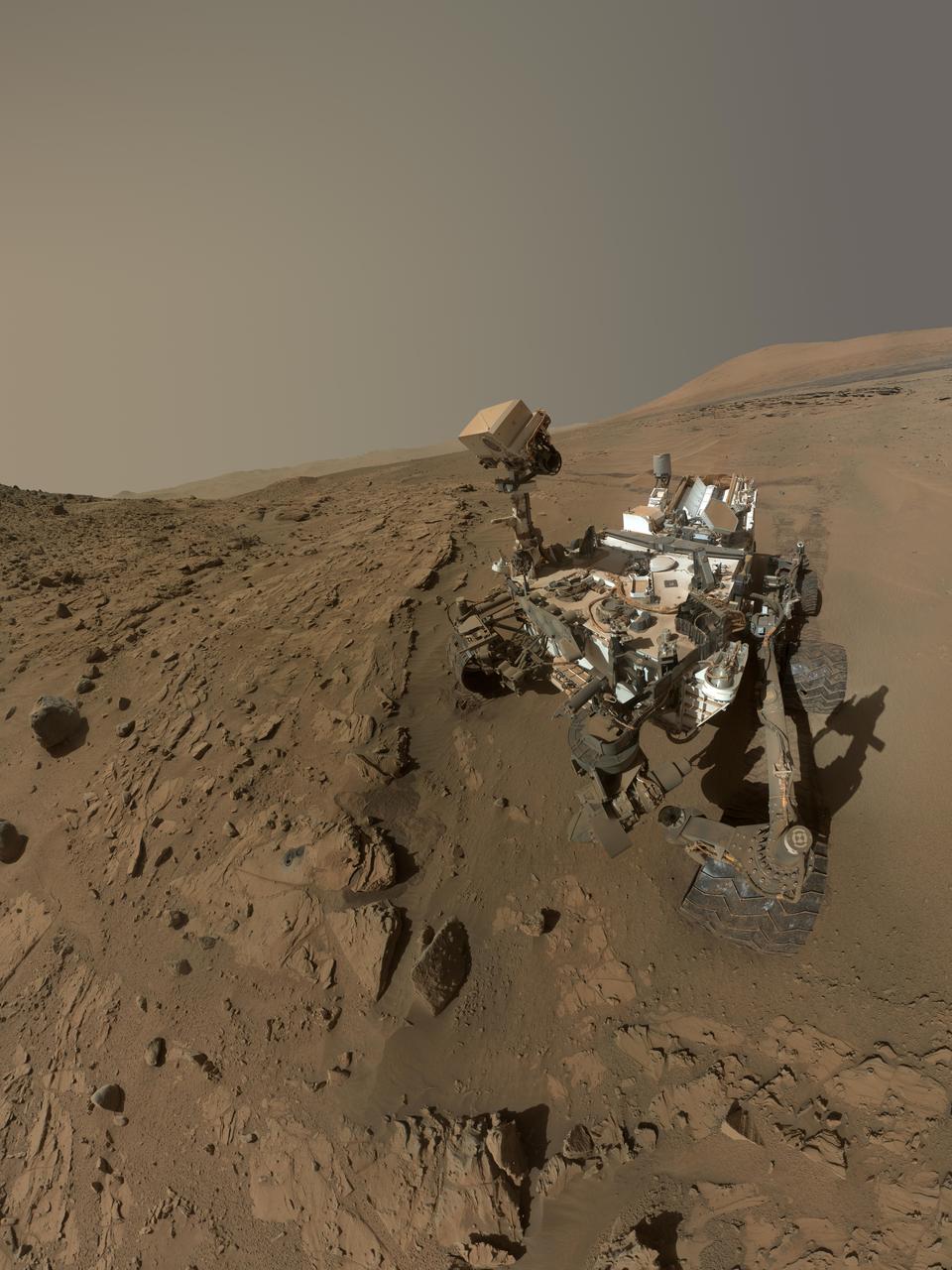
NASA Curiosity Mars rover used the MAHLI camera at the end of its arm in April and May 2014 to take dozens of component images combined into this self-portrait where the rover drilled into a sandstone target called Windjana.
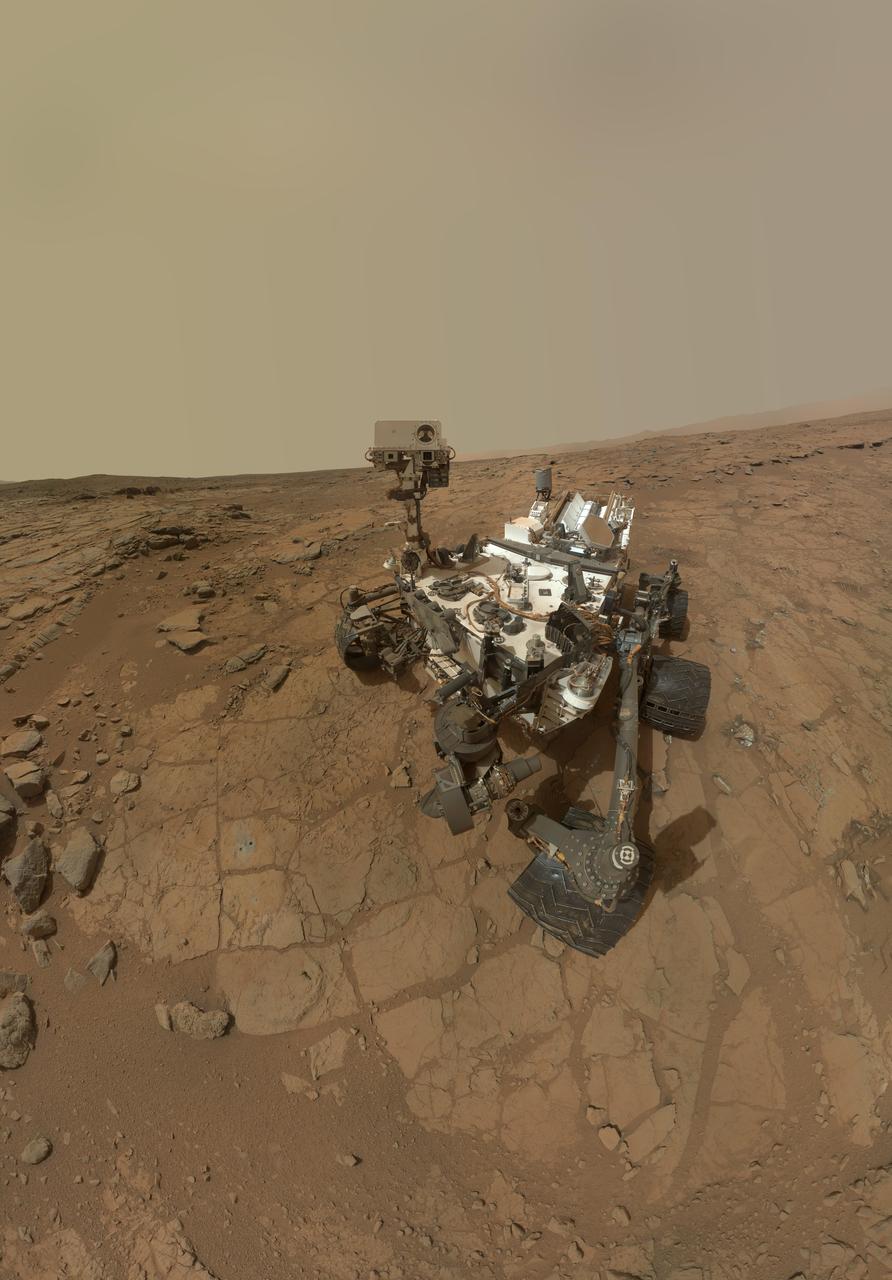
This self-portrait of NASA Mars rover Curiosity combines dozens of exposures to show gray-powder and two holes where Curiosity used its drill on the rock target John Klein.
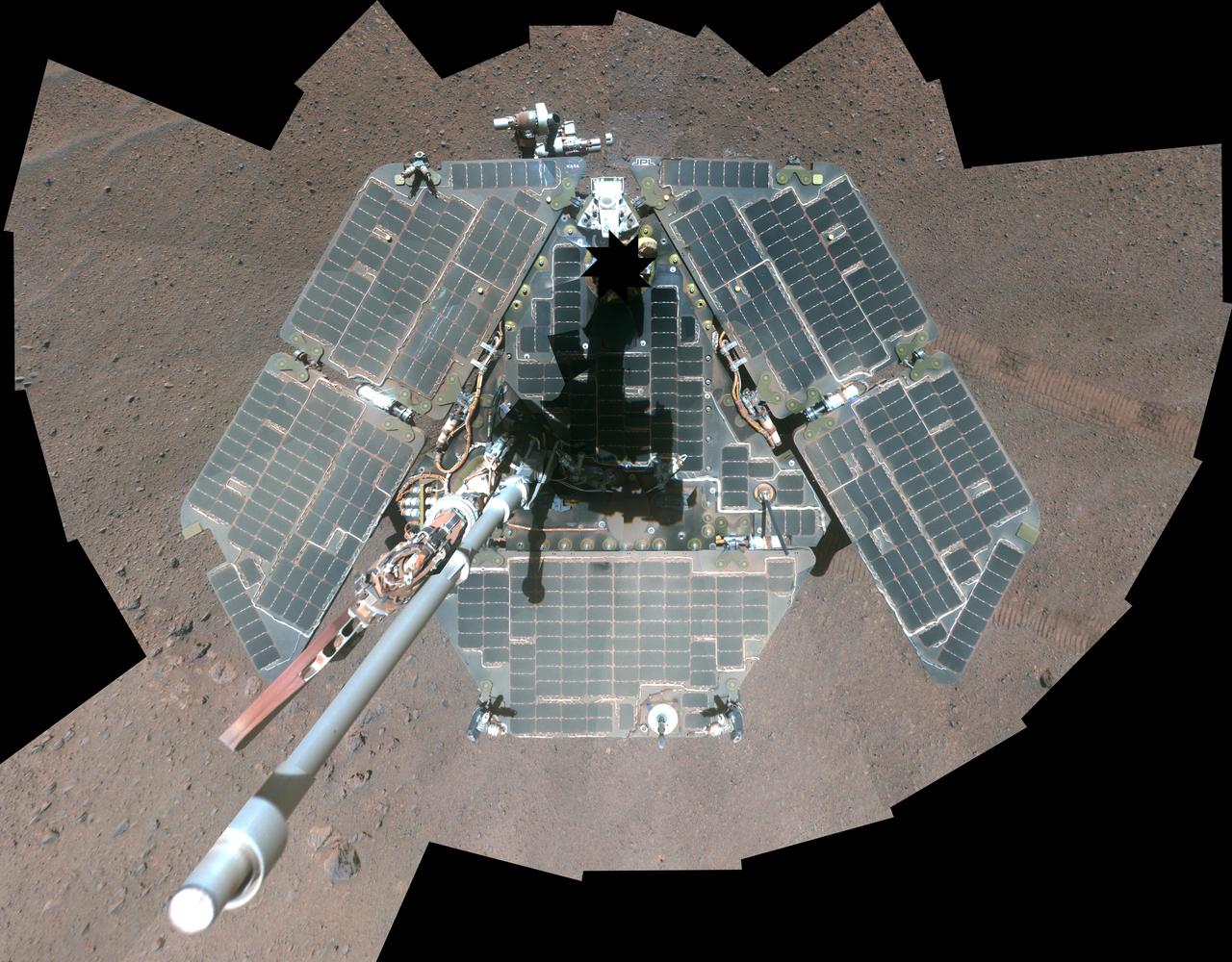
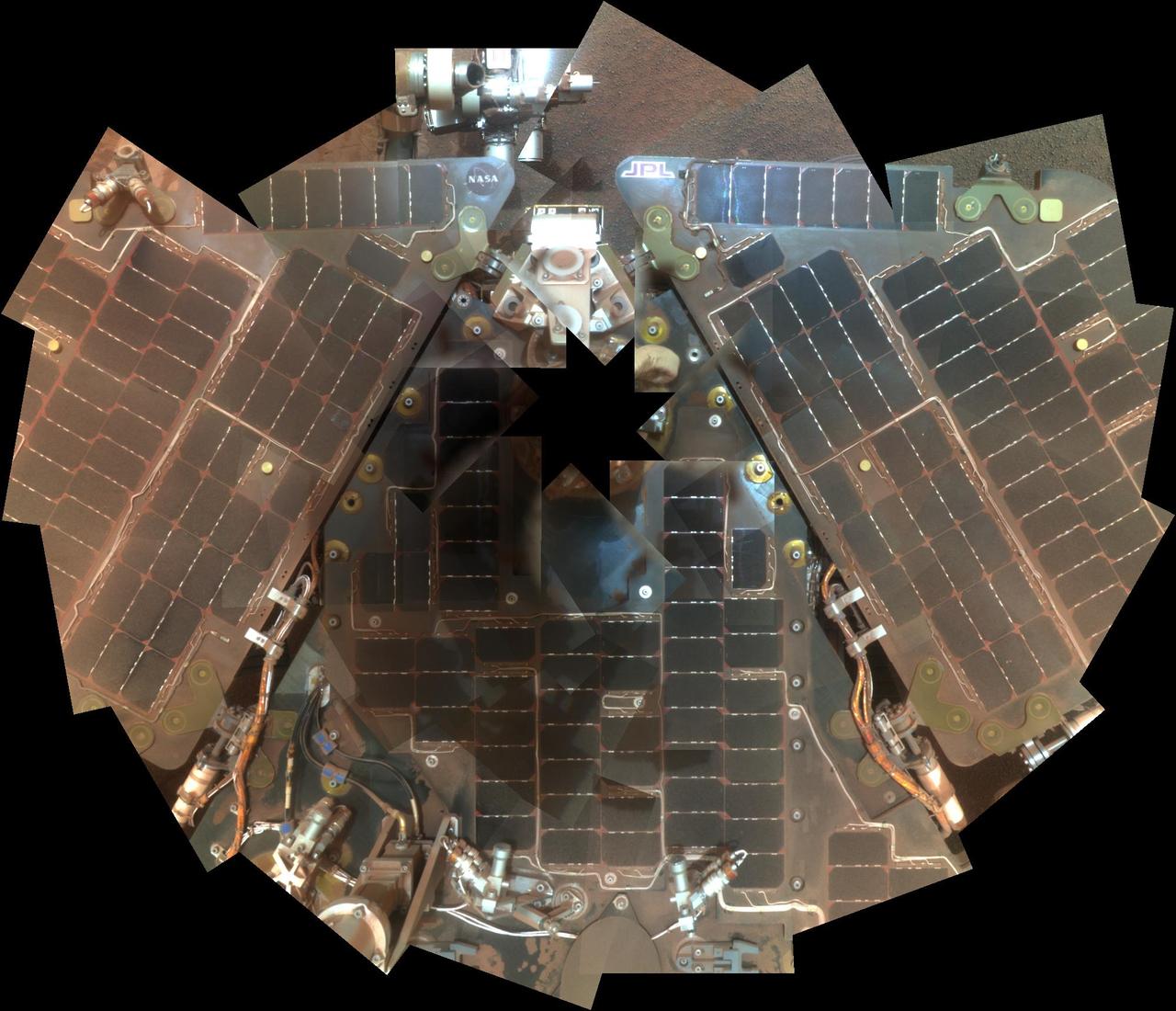
A false-color self-portrait of NASA Mars Exploration Rover Opportunity taken by the rover panoramic camera Pancam shows effects of recent winds removing much of the dust from the solar arrays.
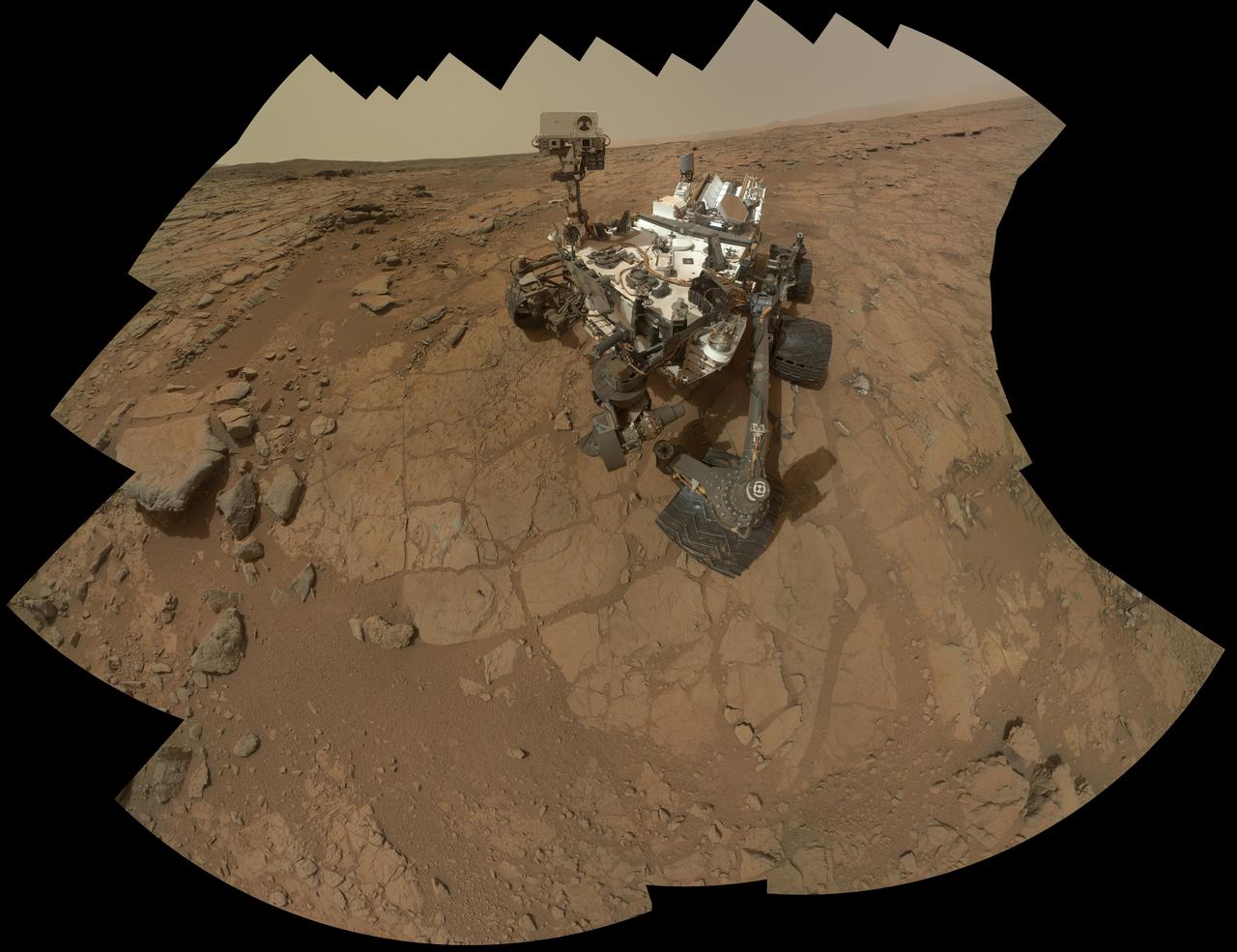
The rover is positioned at a patch of flat outcrop called John Klein, which was selected as the site for the first rock-drilling activities by NASA Curiosity. This self-portrait was acquired to document the drilling site.
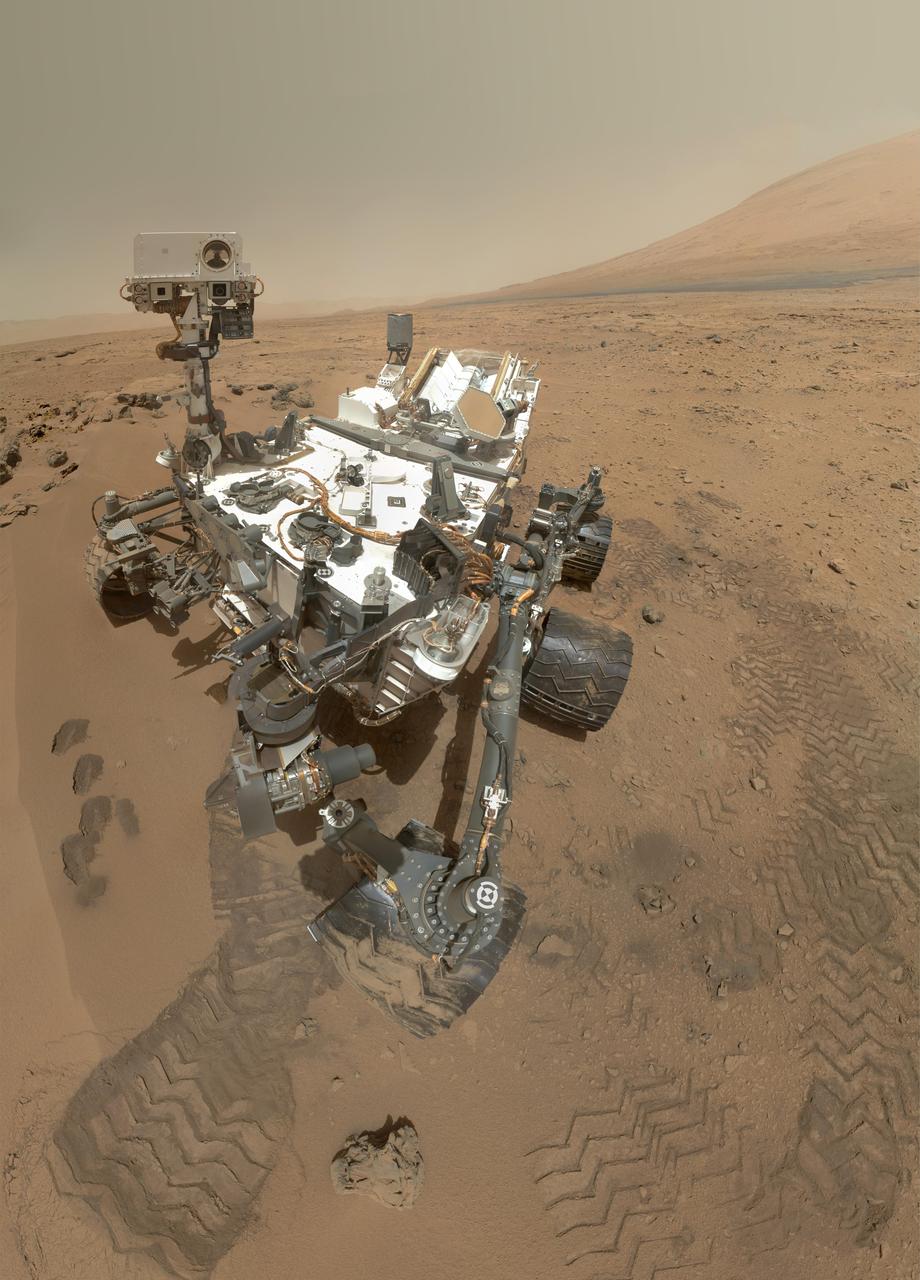
NASA Curiosity rover used its Mars Hand Lens Imager MAHLI to capture a set of 55 high-resolution images, which were stitched together to create a full-color self-portrait.
A self-portrait of NASA Mars Exploration Rover Opportunity taken by the rover panoramic camera Pancam in late March 2014 shows effects of recent winds removing much of the dust from the rover solar arrays.

The camera is reflected in his helmet visor as Extravehicular crewmember 1 (EV1) Jeff Williams takes a self-portrait during Extravehicular Activity 36 (EVA 36).
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Quela" drilling location in the "Murray Buttes" area on lower Mount Sharp. Key features on the skyline of this panorama are the dark mesa called "M12" to the left of the rover's mast and pale, upper Mount Sharp to the right of the mast. The top of M12 stands about 23 feet (7 meters) above the base of the sloping piles of rocks just behind Curiosity. The scene combines approximately 60 images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover's robotic arm. Most of the component images were taken on Sept. 17, 2016, during the 1,463rd Martian day, or sol, of Curiosity's work on Mars. Two component images of the drill-hole area in front of the rover were taken on Sol 1466 (Sept. 20) to show the hole created by collecting a drilled sample at Quela on Sol 1464 (Sept. 18). The skyline sweeps from west on the left to south-southwest on the right, with the rover's mast at northeast. The rover's location when it recorded this scene was where it ended a drive on Sol 1455, mapped at http://mars.nasa.gov/msl/multimedia/images/?ImageID=8029. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at other sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390"), "Buckskin" (PIA19808) and "Gobabeb" (PIA20316). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. http://photojournal.jpl.nasa.gov/catalog/PIA20844

The camera is reflected in his helmet visor as Extravehicular crewmember 2 (EV2) Terry Virts takes a self-portrait during Extravehicular Activity 29 (EVA 29). Image was released by astronaut on Twitter.
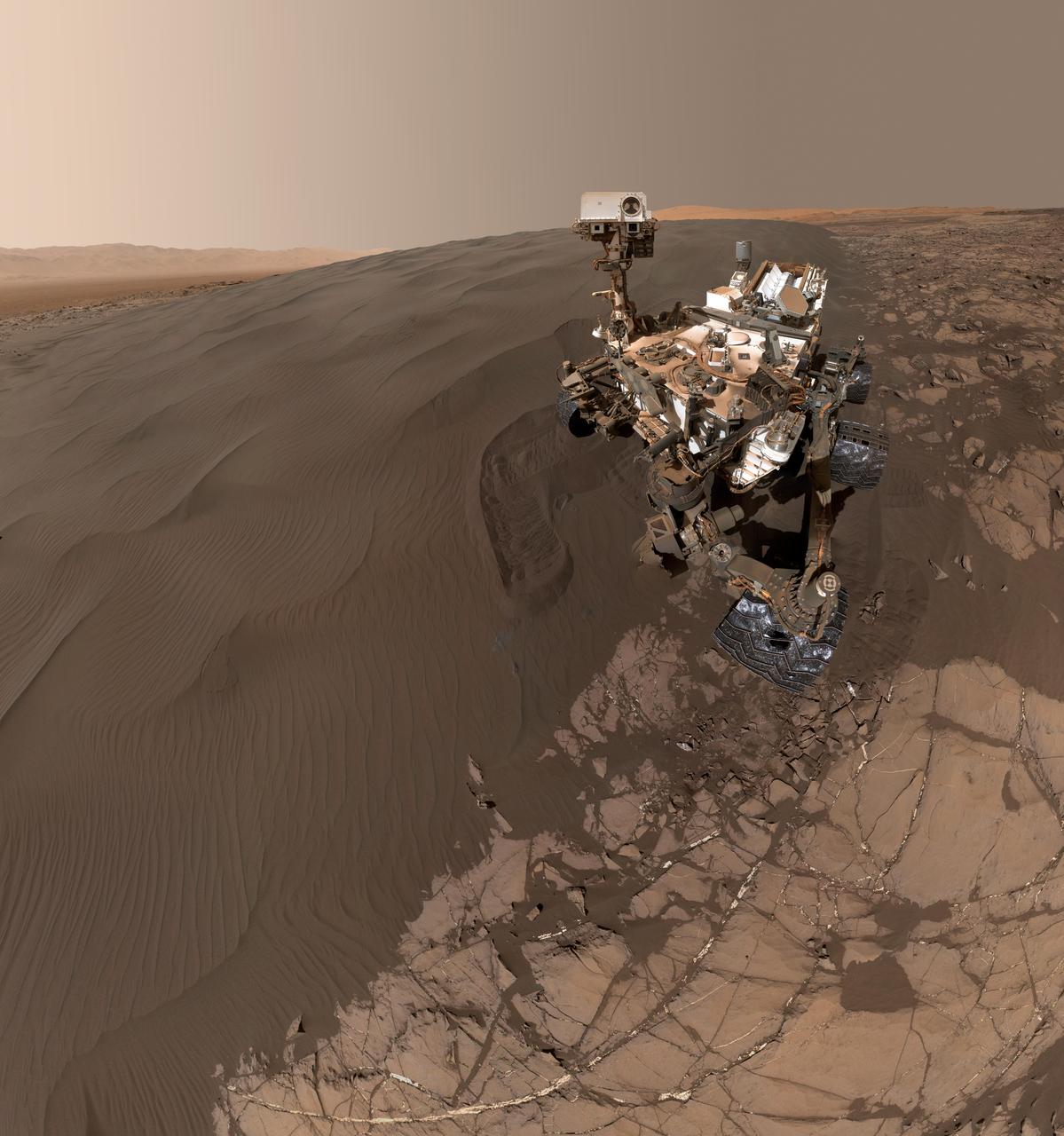
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at "Namib Dune," where the rover's activities included scuffing into the dune with a wheel and scooping samples of sand for laboratory analysis. The scene combines 57 images taken on Jan. 19, 2016, during the 1,228th Martian day, or sol, of Curiosity's work on Mars. The camera used for this is the Mars Hand Lens Imager (MAHLI) at the end of the rover's robotic arm. Namib Dune is part of the dark-sand "Bagnold Dune Field" along the northwestern flank of Mount Sharp. Images taken from orbit have shown that dunes in the Bagnold field move as much as about 3 feet (1 meter) per Earth year. The location of Namib Dune is show on a map of Curiosity's route at http://mars.nasa.gov/msl/multimedia/images/?ImageID=7640. The relationship of Bagnold Dune Field to the lower portion of Mount Sharp is shown in a map at PIA16064. The view does not include the rover's arm. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites, including "Rocknest" (PIA16468), "Windjana" (PIA18390) and "Buckskin" (PIA19807). For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Other Curiosity self-portraits are available at http://photojournal.jpl.nasa.gov/catalog/PIA20316

This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site, where its drill collected the mission's fifth taste of Mount Sharp. The scene combines dozens of images taken during the 1,126th Martian day, or sol, of Curiosity's work during Mars (Oct. 6, 2015, PDT), by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover's robotic arm. The rock drilled at this site is sandstone in the Stimson geological unit inside Gale Crater. The location is on cross-bedded sandstone in which the cross bedding is more evident in views from when the rover was approaching the area, such as PIA19818. The view is centered toward the west-northwest. It does not include the rover's robotic arm, though the shadow of the arm is visible on the ground. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937) and "Windjana" (PIA18390). This portrait of the rover was designed to show the Chemistry and Camera (ChemCam) instrument atop the rover appearing level. This causes the horizon to appear to tilt toward the left, but in reality it is fairly flat. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. The drilled hole in the rock, appearing grey near the lower left corner of the image, is 0.63 inch (1.6 centimeters) in diameter. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19920
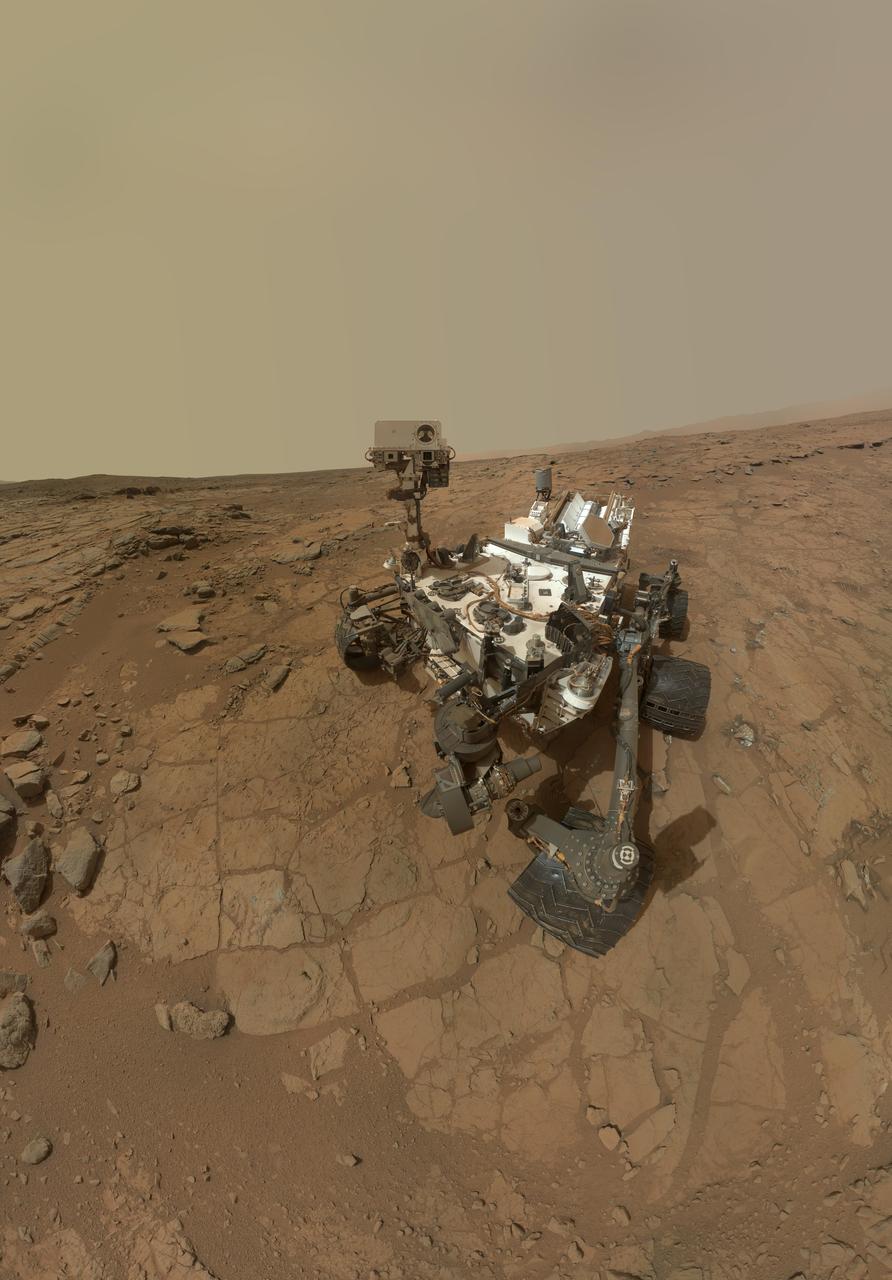
This rectangular version of a self-portrait of NASA Mars rover Curiosity combines dozens of exposures taken by the rover Mars Hand Lens Imager MAHLI during the 177th Martian day, or sol, of Curiosity work on Mars Feb. 3, 2013.
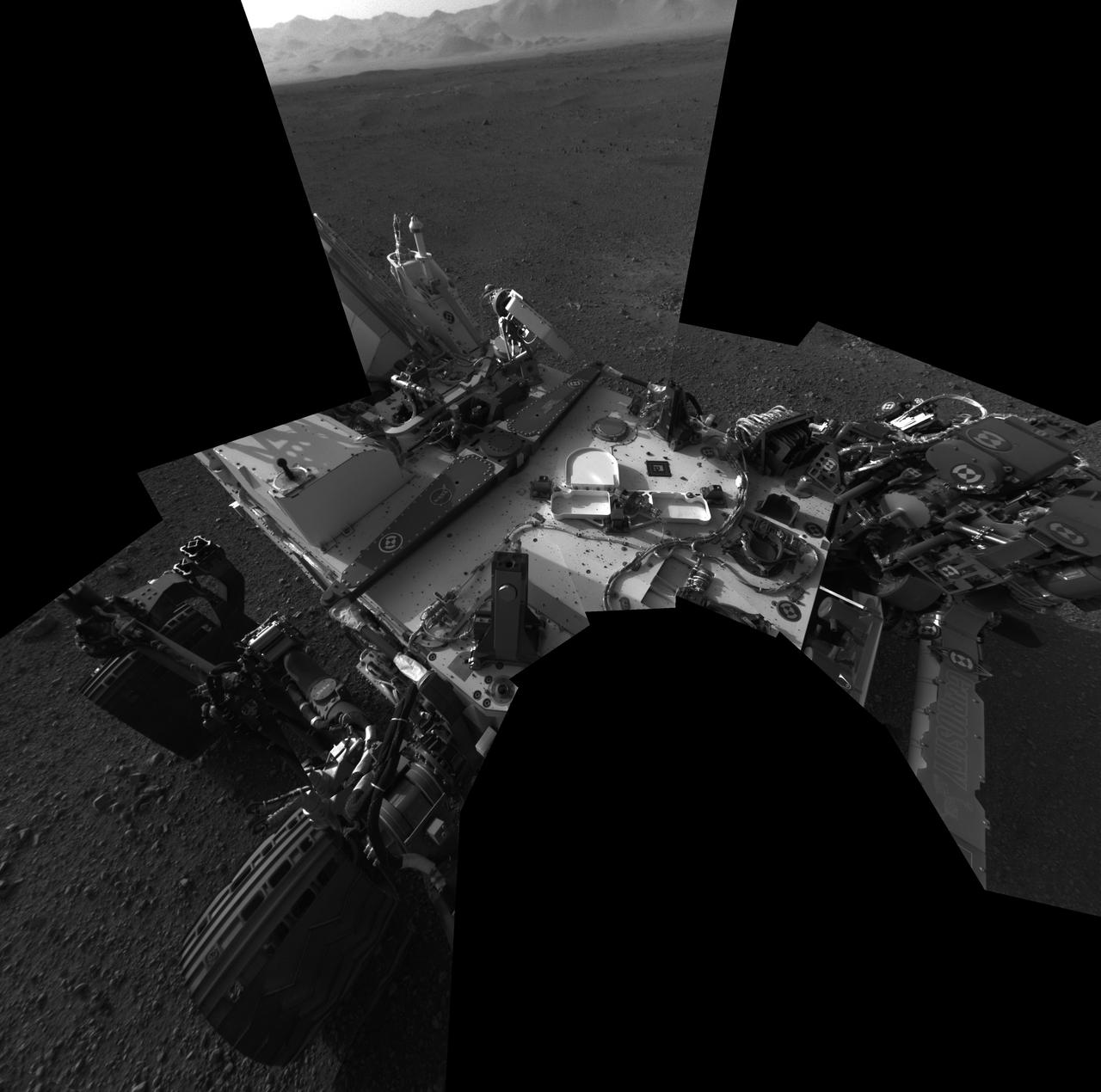
This full-resolution self-portrait shows the deck of NASA Curiosity rover from the rover Navigation cameras. This full-resolution self-portrait shows the deck of NASA Curiosity rover from the rover Navigation cameras.
This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle above the "Buckskin" rock target, where the mission collected its seventh drilled sample. The site is in the "Marias Pass" area of lower Mount Sharp. The scene combines dozens of images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. The 92 component images are among MAHLI Sol 1065 raw images at http://mars.nasa.gov/msl/multimedia/raw/?s=1065&camera=MAHLI. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the Marias Pass area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates the horizon on the left and right of the mosaic. A portion of this selfie cropped tighter around the rover is at PIA19808. Another version of the wide view, presented in a projection that shows the horizon as a circle, is at PIA19806. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. Before sending Curiosity the arm-positioning commands for this Buckskin belly panorama, the team previewed the low-angle sequence of camera pointings on a test rover in California. A mosaic from that test is at PIA19810. This selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19807

ISS028-E-016173 (12 July 2011) --- Because of his shiny helmet visor, this "self portrait" of NASA astronaut Mike Fossum, photographed during a July 12 spacewalk, mirrors a panoramic scene of the docked International Space Station and space shuttle Atlantis and the blue and white Earth below.

ISS028-E-016175 (12 July 2011) --- Because of his shiny helmet visor, this "self portrait" of NASA astronaut Mike Fossum, photographed during a July 12 spacewalk, mirrors a panoramic scene of the docked International Space Station and space shuttle Atlantis and the blue and white Earth below.

A self-portrait of NASA's Curiosity rover taken on Sol 2082 (June 15, 2018). A Martian dust storm has reduced sunlight and visibility at the rover's location in Gale Crater. Self-portraits are created using images taken by Curiosity's Mars Hands Lens Imager (MAHLI). https://photojournal.jpl.nasa.gov/catalog/PIA22486
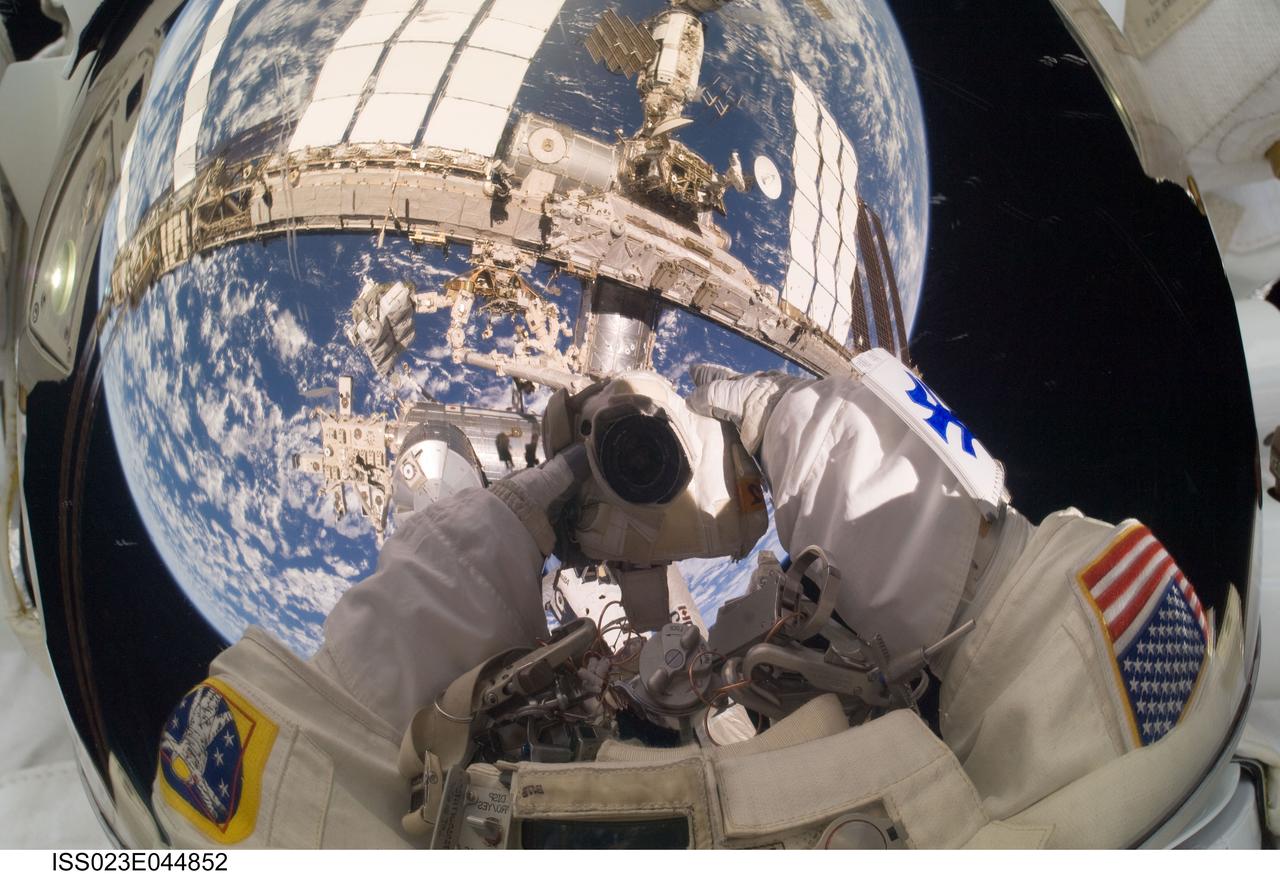
ISS023-E-044852 (17 May 2010) --- NASA astronaut Garrett Reisman, STS-132 mission specialist, takes a busy "self portrait" into his helmet visor while participating in the first of three spacewalks scheduled for the Atlantis crew and their Expedition 23 hosts. Though three sessions of extravehicular activity (EVA) will involve only three astronauts (two on each occasion) who actually leave the shirt-sleeve environments of the two docked spacecraft, all twelve astronauts and cosmonauts have roles in supporting the EVA work. Part of the space station and the blue and white Earth are among the objects seen in his visor. Astronaut Steve Bowen, mission specialist, is out of frame. Photo credit: NASA or National Aeronautics and Space Administration

ISS023-E-044846 (17 May 2010) --- NASA astronaut Garrett Reisman, STS-132 mission specialist, takes a busy "self portrait" into his helmet visor while participating in the first of three spacewalks scheduled for the Atlantis crew and their Expedition 23 hosts. Though three sessions of extravehicular activity (EVA) will involve only three astronauts (two on each occasion) who actually leave the shirt-sleeve environments of the two docked spacecraft, all twelve astronauts and cosmonauts have roles in supporting the EVA work. Part of the space station and the blue and white Earth are among the objects seen in his visor. Astronaut Steve Bowen, mission specialist, is out of frame. Photo credit: NASA or National Aeronautics and Space Administration
This self-portrait shows the deck of NASA Curiosity rover from the rover Navigation camera. The rim of Gale Crater can be seen at upper right.
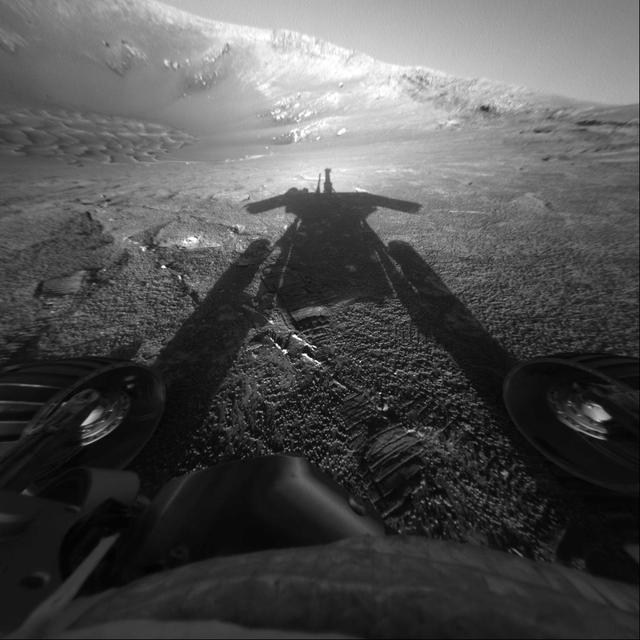
This self-portrait of NASA Mars Exploration Rover Opportunity comes courtesy of the Sun and the rover front hazard-avoidance camera. The dramatic snapshot of Opportunity shadow was taken as the rover continues to move farther into Endurance Crater
This full-resolution self-portrait shows the deck of NASA Curiosity rover. The back of the rover can be at top left, two of the right side wheels at left, and the undulating rim of Gale Crater forms the lighter color strip in the background.
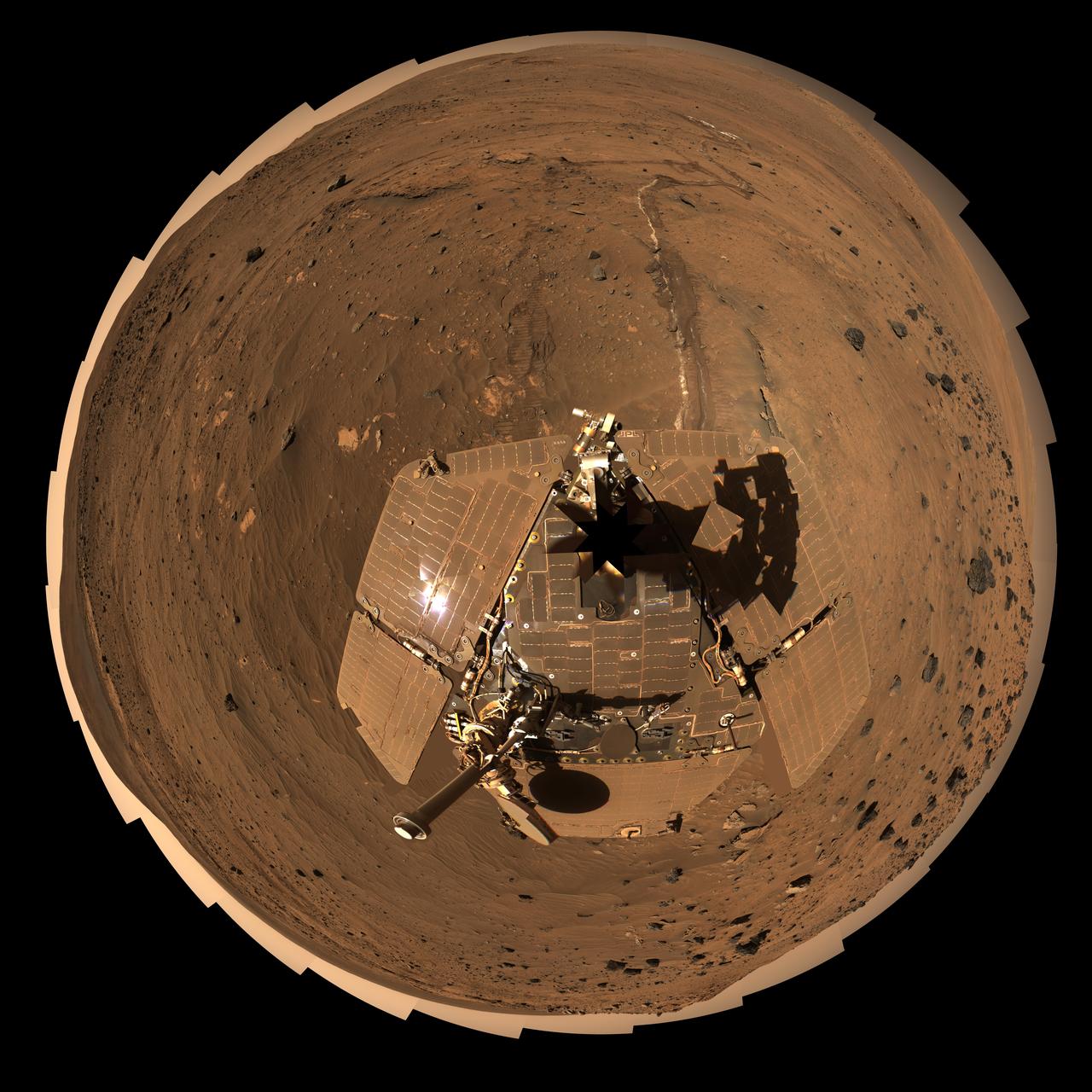
This self-portrait of NASA Mars Exploration Rover Spirit is a polar projection of the 360-degree McMurdo panorama made from images taken by Spirit from April through October 2006.
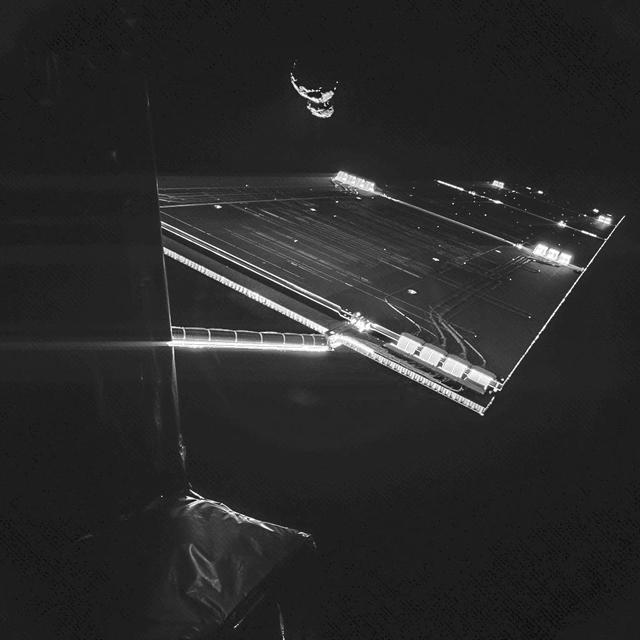
The Philae lander of the European Space Agency Rosetta mission took this self-portrait of the spacecraft on Sept. 7, 2014, at a distance of about 30 miles 50 kilometers from comet 67P/Churyumov-Gerasimenko.
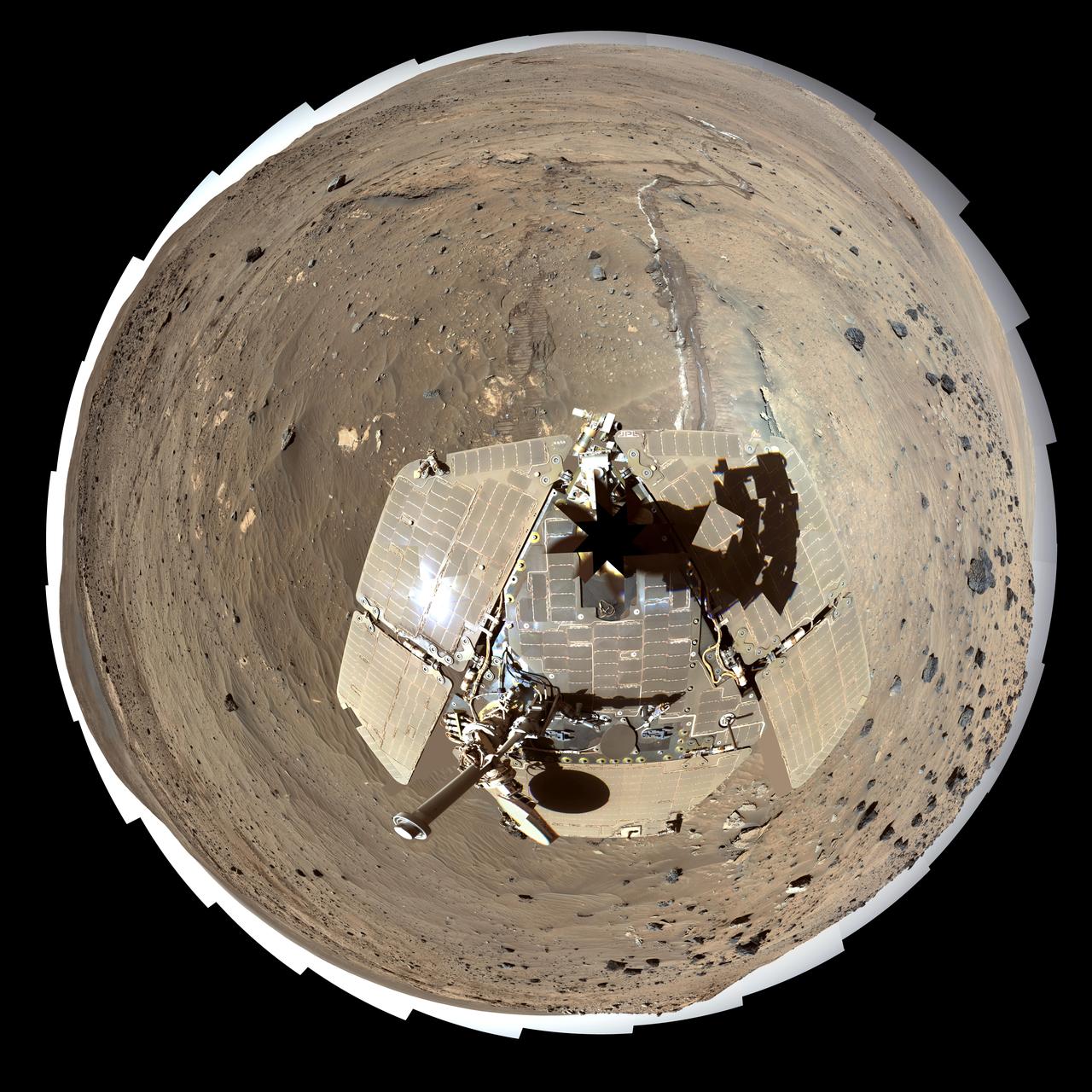
This self-portrait of NASA Mars Exploration Rover Spirit is a false color polar projection of the 360-degree McMurdo panorama made from images taken by Spirit from April through October 2006.
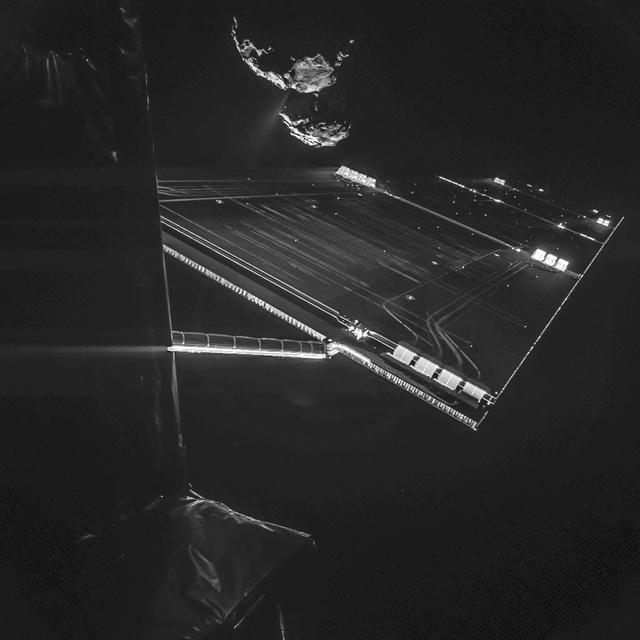
The Philae lander of the European Space Agency Rosetta mission took this self-portrait of the spacecraft on Sept. 7, 2014, at a distance of about 10 miles 16 kilometers from comet 67P/Churyumov-Gerasimenko.
This self-portrait of NASA's Opportunity Mars rover shows the vehicle at a site called "Perseverance Valley" on the slopes of Endeavour Crater. It was taken with the rover's Microscopic Imager to celebrate the 5000th Martian Day, or sol, of the rover's mission. The Microscopic Imager is a fixed-focus camera mounted at the end of the rover's robotic arm. Because it was designed for close inspection of rocks, soils and other targets at a distance of around 2.7 inches (7 cm), the rover is out of focus. The rover's self-portrait view is made by stitching together multiple images take on Sol 5,000 and 5,006 of the mission. Wrist motions and turret rotations on the arm allowed the Microscopic Imager to acquire the mosaic's component images. The resulting mosaic does not include the rover's arm. This simulation from planning software used to write commands for the rover shows the motion of the robotic arm, and an inset view of the Microscopic Imager. https://photojournal.jpl.nasa.gov/catalog/PIA22222

This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called "Buckskin" on lower Mount Sharp. The selfie combines several component images taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. For scale, the rover's wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. This view is a portion of a larger panorama available at PIA19807. A close look reveals a small rock stuck onto Curiosity's left middle wheel (on the right in this head-on view). The rock had been seen previously during periodic monitoring of wheel condition about three weeks earlier, in the MAHLI raw image at http://mars.nasa.gov/msl/multimedia/raw/?rawid=1046MH0002640000400290E01_DXXX&s=1046. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This yielded a view that includes the rover's "belly," as in a partial self-portrait (/catalog/PIA16137) taken about five weeks after Curiosity's August 2012 landing inside Mars' Gale Crater. The selfie at Buckskin does not include the rover's robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites "Rocknest" (PIA16468), "John Klein" (PIA16937), "Windjana" (PIA18390) and "Mojave" (PIA19142). MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19808

The Rover Environmental Monitoring Station (REMS) on NASA's Curiosity Mars rover includes temperature and humidity sensors mounted on the rover's mast. One of the REMS booms extends to the left from the mast in this view. Spain provided REMS to NASA's Mars Science Laboratory Project. The monitoring station has provided information about air pressure, relative humidity, air temperature, ground temperature, wind and ultraviolet radiation in all Martian seasons and at all times of day or night. This view is a detail from a January 2015 Curiosity self-portrait. The self-portrait, at PIA19142, was assembled from images taken by Curiosity's Mars Hand Lens Imager. http://photojournal.jpl.nasa.gov/catalog/PIA19164
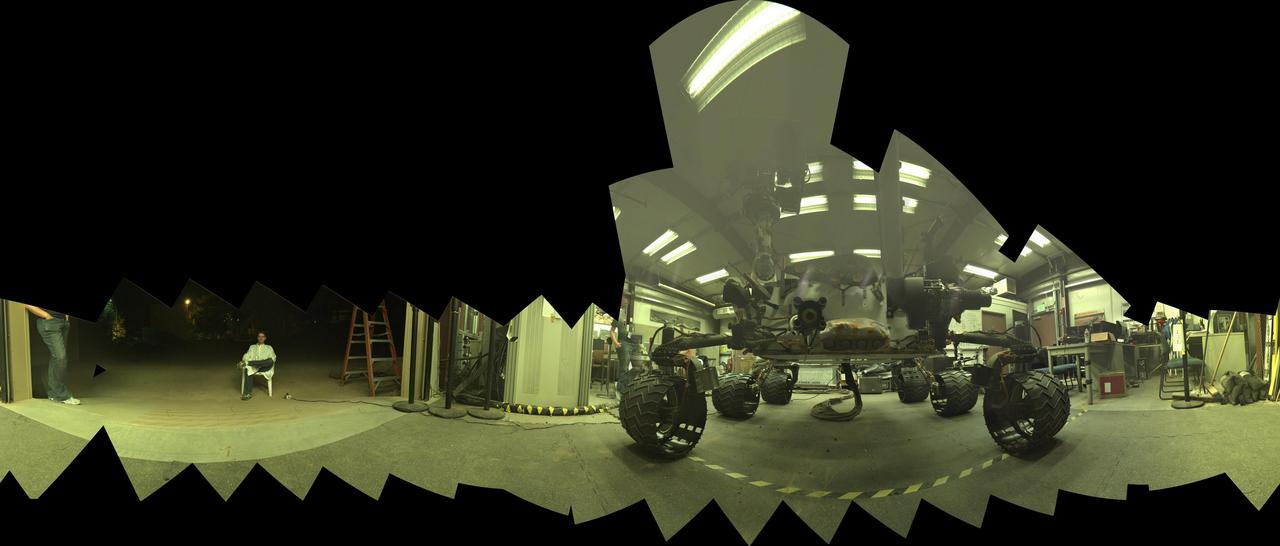
This view of a test rover at NASA's Jet Propulsion Laboratory, Pasadena, California, results from advance testing of arm positions and camera pointings for taking a low-angle self-portrait of NASA's Curiosity Mars rover. This rehearsal in California led to a dramatic Aug. 5, 2015, selfie of Curiosity, online at PIA19807. Curiosity's arm-mounted Mars Hand Lens Imager (MAHLI) camera took 92 of component images that were assembled into that mosaic. The rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This practice version was taken at JPL's Mars Yard in July 2013, using the Vehicle System Test Bed (VSTB) rover, which has a test copy of MAHLI on its robotic arm. MAHLI was built by Malin Space Science Systems, San Diego. JPL, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19810

This mosaic of images was taken by NASA Mars Exploration Rover Opportunity during December of 2011. The accumulation of dust reduces the rover power supply, and the rover mobility is limited until the winter is over or wind cleans the panels.
The mosaic shows NASA Curiosity rover at Rocknest, the spot in Gale Crater where the mission first scoop sampling took place. Four scoop scars can be seen in the regolith in front of the rover.

ISS039-E-003797 (15 March 2014) --- Expedition 39 flight engineer Rick Mastracchio poses for a self-portrait with Robonaut 2 in the U.S. Laboratory (Destiny) during a televised public event. (Note: The event was shown live on March 14 in U.S. time zones).

Commander Barry Wilmore takes a self-portrait with food packages (smoked turkey, cranapple dessert, cornbread dressing, and tea with sugar) planned for his Thanksgiving meal. Image was taken near the galley table in the Unity Node 1, and released by Wilmore on Instagram.
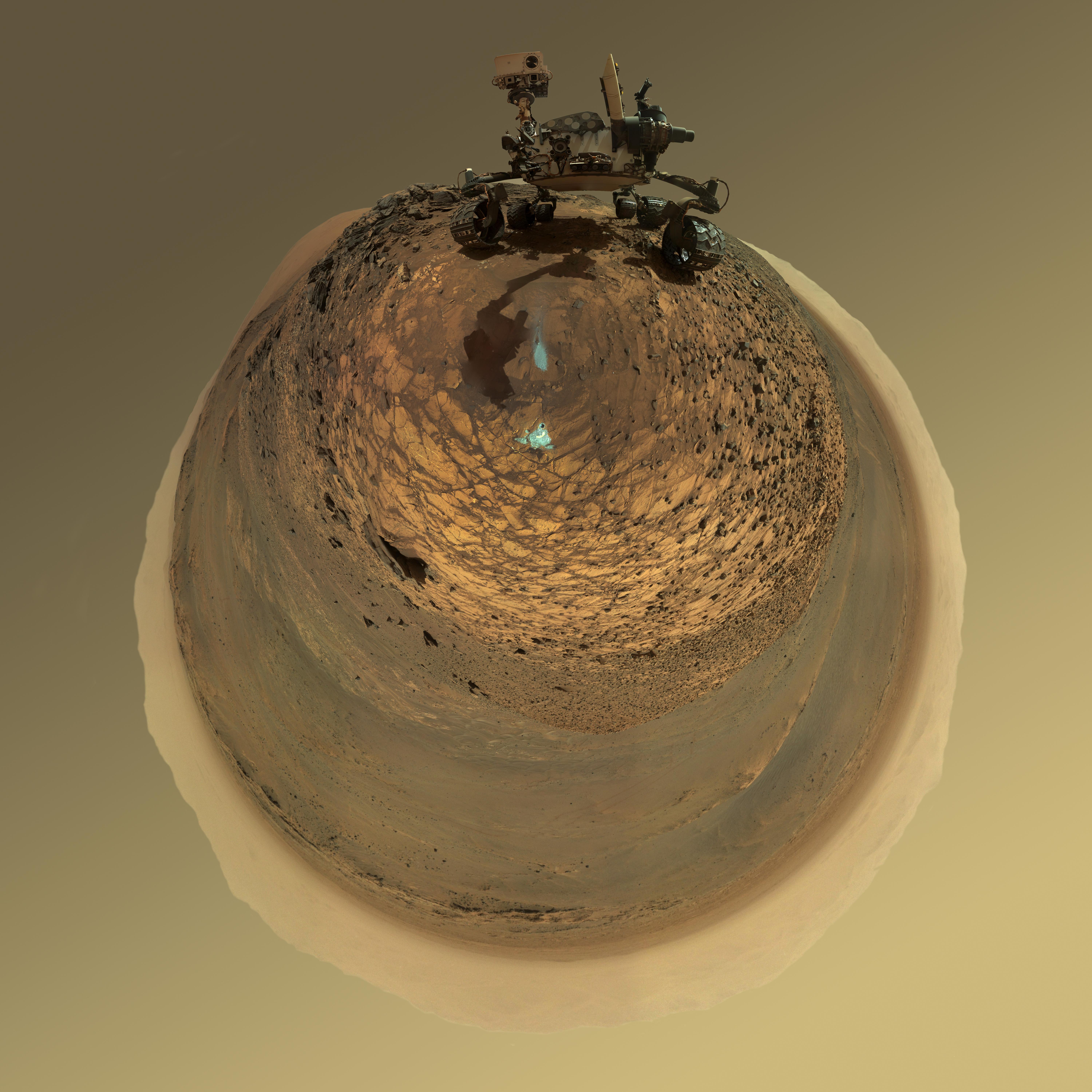
This version of a self-portrait of NASA's Curiosity Mars rover at a drilling site called "Buckskin" on lower Mount Sharp is presented as a stereographic projection, which shows the horizon as a circle. It is a mosaic assembled from the same set of 92 component raw images used for the flatter-horizon version at PIA19807. The component images were taken by Curiosity's Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover's work on Mars. Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from inside Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity's robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings. The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the "Marias Pass" area. The upper levels of Mount Sharp are visible behind the rover, while Gale Crater's northern rim dominates most of the rest of the horizon.the horizon on the left and right of the mosaic. MAHLI is mounted at the end of the rover's robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. The assembled mosaic does not include the rover's arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. MAHLI was built by Malin Space Science Systems, San Diego. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19806

NASA Mars Exploration Rover Opportunity captured this view of its afternoon shadow stretching into Endeavour Crater during the 3,051st Martian day, or sol, of Opportunity work on Mars Aug. 23, 2012.
In 2007, NASA Mars Exploration Rover Opportunity had endured a Martian dust storm and the rover team wanted to assess the dustiness of the solar panels.

ISS045E082998 (10/28/2015) --- NASA astronaut Scott Kelly snaps a quick space selfie during his first ever spacewalk on Oct 28, 2015. Kelly and NASA astronaut Kjell Lindgren worked outside for seven hours and 16 minutes on a series of tasks to service and upgrade the International Space Station. They wrapped a dark matter detection experiment in a thermal blanket, lubricated the tip of the Canadarm2 robotic arm and then routed power and data cables for a future docking port.

iss054e047709 (Feb. 16, 2018) --- NASA astronaut and Expedition 54 Flight Engineer Mark Vande Hei takes a "space-selfie" during a spacewalk with astronaut Norishige Kanai (out of frame) of the Japan Aerospace Exploration Agency (JAXA). The duo spent nearly six hours servicing components on the Canadarm2 robotic arm.

ISS035-E-037044 (11 May 2013) --- Expedition 35 Flight Engineers Chris Cassidy takes a self portrait, as he and Tom Marshburn (seen partially in Cassidy's helmet visor) accomplished a space walk on May 11 to inspect and replace a pump controller box on the International Space Station?s far port truss (P6) leaking ammonia coolant. The two NASA astronauts began the 5-hour, 30-minute space walk at 8:44 a.m. and completed it at 2:14 p.m. EDT.

ISS039-E-014878 (22 April 2014) --- Part of the upper body of NASA astronaut Rick Mastracchio is pictured in a "selfie" or self-portrait during a spacewalk to replace a failed backup computer relay box in the S0 truss of the International Space Station on April 22, 2014. He was accompanied on the spacewalk by fellow Flight Engineer Steve Swanson of NASA.

ISS035-E-037002 (11 May 2013) --- Expedition 35 Flight Engineers Chris Cassidy takes a self portrait, as he and Tom Marshburn (seen partially in Cassidy's helmet visor) accomplished a space walk on May 11 to inspect and replace a pump controller box on the International Space Station?s far port truss (P6) leaking ammonia coolant. The two NASA astronauts began the 5-hour, 30-minute space walk at 8:44 a.m. and completed it at 2:14 p.m. EDT.

iss059e016574 (April 8, 2019) --- Expedition 59 Flight Engineer David Saint-Jacques of the Canadian Space Agency takes a quick self portrait while working outside the International Space Station. In a six and a half hour spacewalk, Saint-Jacques and NASA astronaut Anne McClain successfully established a redundant path of power to the Canadian-built robotic arm, known as Canadarm2, and installed cables to provide for more expansive wireless communications coverage outside the orbital complex, as well as for enhanced hardwired computer network capability. The duo also relocated an adapter plate from the first spacewalk in preparation for future battery upgrade operations.

S115-E-05719 (12 Sept. 2006) --- Astronaut Heidemarie M. Stefanyshyn-Piper, STS-115 mission specialist, exposed this self-portrait during the Sept. 12 space walk that marked the resumption of construction on the International Space Station. The mission specialist had just unstowed the forward Solar Array Blanket Box (SABB). She shared the day's work with astronaut Joseph R. Tanner, who appears just below the glare in her helmet visor. The two participated in the first of three scheduled STS-115 extravehicular activity (EVA) sessions as the Atlantis astronauts and the Expedition 13 crew members join efforts this week to resume construction of the International Space Station.

ISS018-E-014429 (23 Dec. 2008) Astronaut Michael Fincke, Expedition 18 commander, takes a picture of his own helmet visor with a digital still camera during a Dec. 23 spacewalk on the International Space Station.
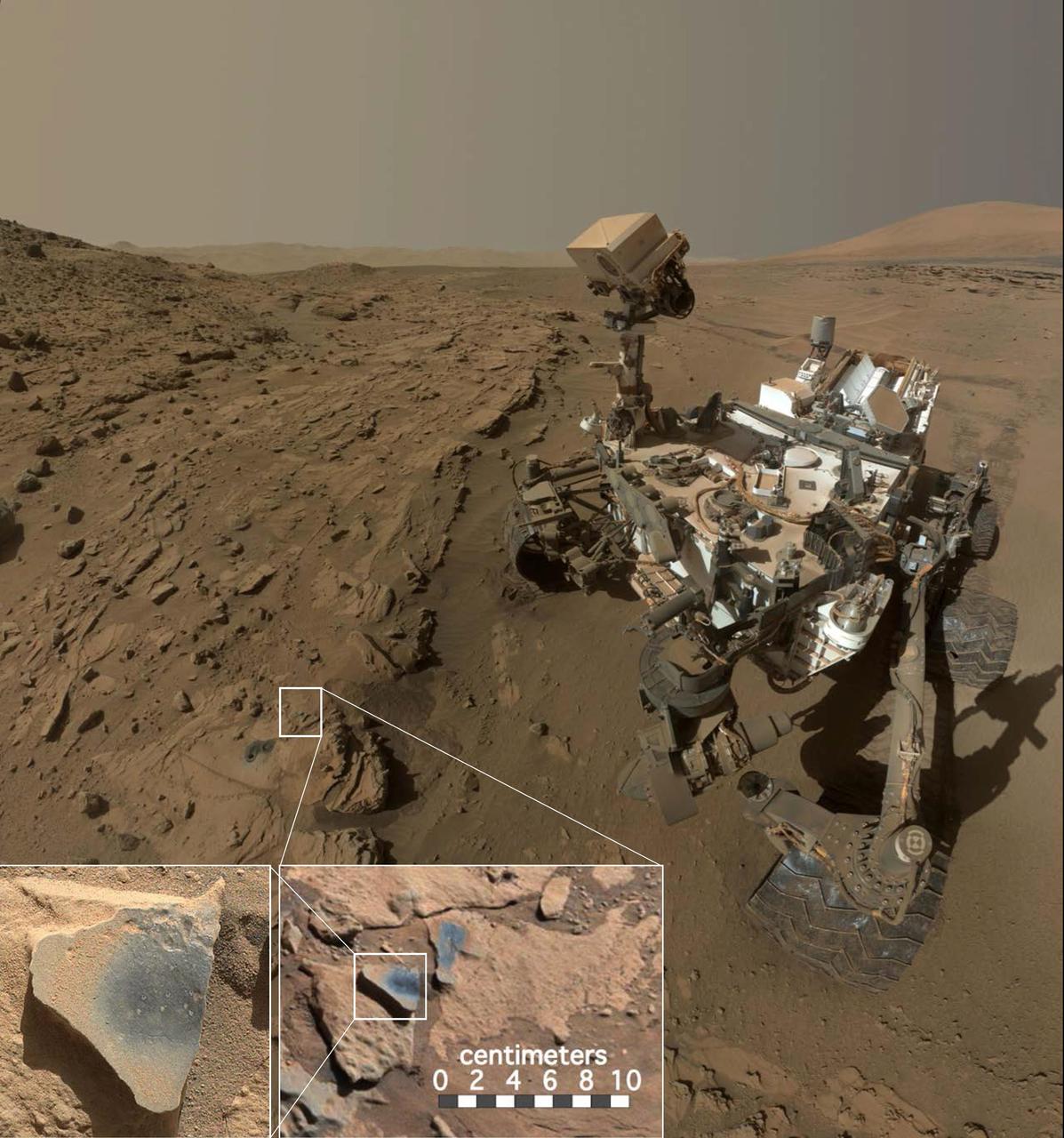
This scene shows NASA's Curiosity Mars rover at a location called "Windjana," where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. In front of the rover are two holes from the rover's sample-collection drill and several dark-toned features that have been cleared of dust (see inset images). These flat features are erosion-resistant fracture fills containing manganese oxides. The discovery of these materials suggests the Martian atmosphere might once have contained higher abundances of free oxygen than it does now. The rover used the Mars Hand Lens Imager (MAHLI) camera in April and May 2014 to take dozens of images that were combined into this self-portrait. http://photojournal.jpl.nasa.gov/catalog/PIA20752
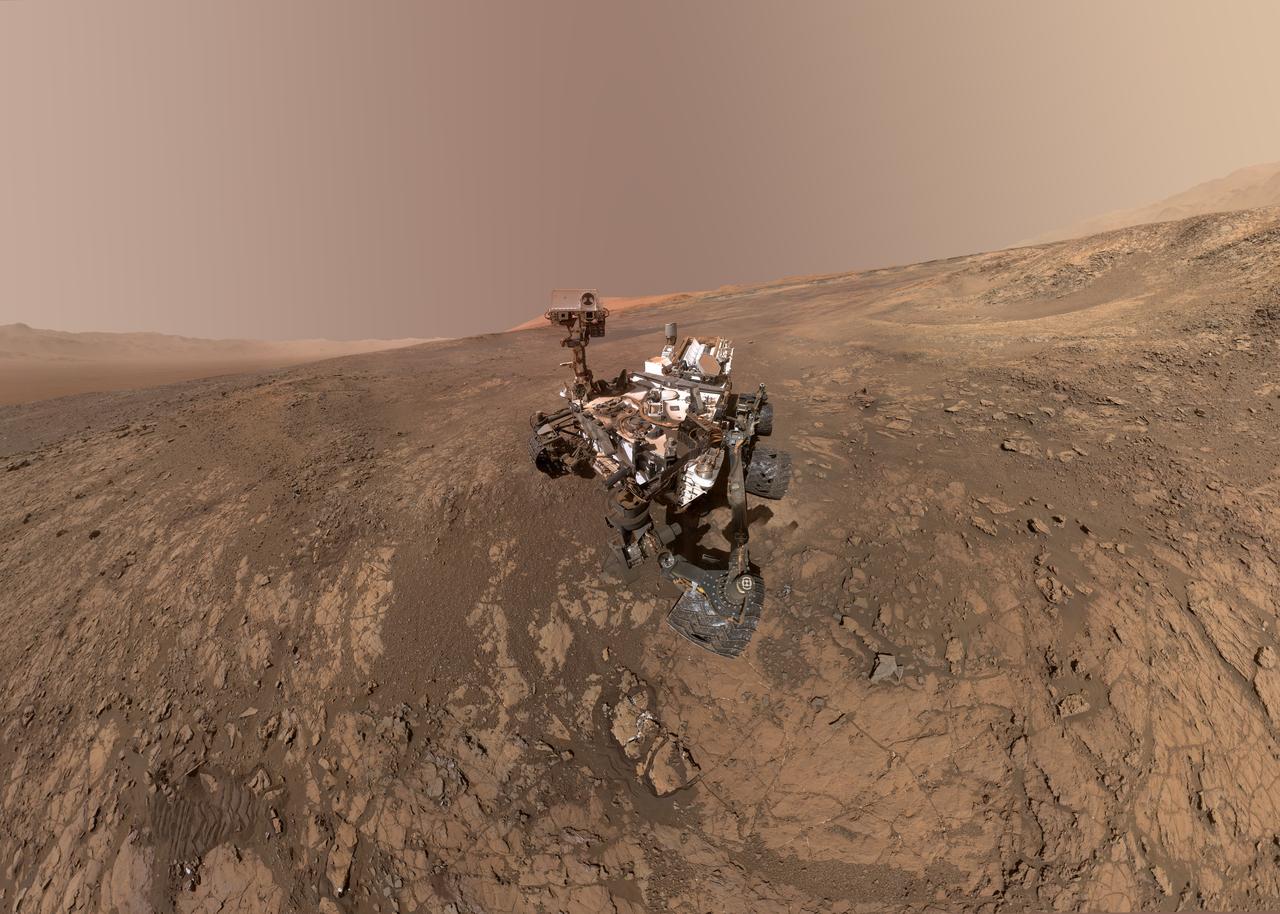
This self-portrait of NASA's Curiosity Mars rover shows the vehicle on Vera Rubin Ridge, which it's been investigating for the past several months. Directly behind the rover is the start of a clay-rich slope scientists are eager to begin exploring. In the coming week, Curiosity will begin to climb this slope. North is on the left and west is on the right, with Gale Crater's rim on the horizon of both edges. Poking up just behind Curiosity's mast is Mount Sharp, photobombing the robot's selfie. Curiosity landed on Mars five years ago with the intention of studying lower Mount Sharp, where it will remain for all of its time on Mars. The mountain's base provides access to layers formed over millions of years. These layers formed in the presence of water -- likely due to a lake or lakes that sat at the bottom of the mountain, which sits inside of Gale Crater. This mosaic was assembled from dozens of images taken by Curiosity's Mars Hands Lens Imager (MAHLI). They were all taken on Jan. 23, 2018, during Sol 1943. The view does not include the rover's arm nor the MAHLI camera itself, except in the miniature scene reflected upside down in the parabolic mirror at the top of the mast. That mirror is part of Curiosity's Chemistry and Camera (ChemCam) instrument. MAHLI appears in the center of the mirror. Wrist motions and turret rotations on the arm allowed MAHLI to acquire the mosaic's component images. The arm was positioned out of the shot in the images, or portions of images, that were used in this mosaic. A full-resolution image is available at https://photojournal.jpl.nasa.gov/catalog/PIA22207

“I am a Black woman in STEM. And when I was growing up, I cannot say that I saw a lot of faces that looked like mine in STEM careers. I had some limited exposure to some notables, like Dr. Mae Jemison. But the names were few and far between of the great scientists or engineers that were Black — let alone Black females. So for me, if anybody sees my picture and says ‘yes, I see someone who looks like me working in STEM’ — that right there is very fulfilling. Just to be seen and to be visible makes a difference. "I also must provide words of encouragement because being in STEM can be difficult as is, let alone having to face the challenges of being a female in a male-dominated field. Or even being a double minority in the workplace. "It’s a matter of being really self-assured that you can do it, despite the fact that you’re going to have failures, that you’re going to have setbacks, and that you’re going have people who may not believe in you, for whatever reason. You have to be self-assured that this is what you want to do and that it can be done. This 4’11” Black woman achieved this, not knowing that STEM was going to be my path or that I was going to end up at NASA — I did it, and I believe that you can do it too — but you have to believe it for yourself.” — Mary Lobo, Director of Office of Technology Incubation and Innovation, Glenn Research Center The Facility Manager for the Space Simulation Facilities at Glenn Research Center, poses inside Vacuum Facility 16 (VF-16) for an Environmental Portrait. The lighting used in this portrait depicts the chamber as having an almost white interior when the chamber is actually almost black in color.
!["The public perception of NASA has a lot to do with our technological successes and the discoveries that we've made, but none of that is possible without the people. "In the six or so years that I've worked at NASA, I've learned a lot of incredible stories — not just of the struggles that different spacecraft encounter on their journeys throughout the universe. There are so many problems that need to be solved and fixes that need to be made, but there are also so many stories of teams that had to work together to accomplish their goals. And a lot of times, these teams are working after hours, on weekends, working late nights and early mornings. These are people who have other problems in their lives that they have to solve, and they're still showing up and making magic happen. "This is why [Aubrey Gemignani] and I started Faces of NASA: We wanted to make that connection. It's not just rockets, astronauts, and telescopes. Hundreds of thousands of people come together to make these missions possible, and that's the part that's really interesting for me. "I like to hold a mirror to other people, and in every Faces of NASA interview, I try to hold a mirror up to what the person has accomplished to get them to be proud of it. For many of those people, it's the first time they have to self-reflect. "That's what's really nice about [the Faces of NASA project]. Everyone who works here is just living day-to-day, so when they have an opportunity to stop for a moment and look back on how far they've come... it's the best feeling for both of us. They're like, 'Wow, I've never really stopped to think about how much I've accomplished or how far I've come.' And I get to share that moment with them. That's my favorite part of Faces of NASA." NASA Communications Strategist, Thalia Patrinos, poses for a portrait, Thursday, July 11, 2024, in Washington. Photo Credit: (NASA/Aubrey Gemignani)](https://images-assets.nasa.gov/image/NHQ202407110011/NHQ202407110011~medium.jpg)
"The public perception of NASA has a lot to do with our technological successes and the discoveries that we've made, but none of that is possible without the people. "In the six or so years that I've worked at NASA, I've learned a lot of incredible stories — not just of the struggles that different spacecraft encounter on their journeys throughout the universe. There are so many problems that need to be solved and fixes that need to be made, but there are also so many stories of teams that had to work together to accomplish their goals. And a lot of times, these teams are working after hours, on weekends, working late nights and early mornings. These are people who have other problems in their lives that they have to solve, and they're still showing up and making magic happen. "This is why [Aubrey Gemignani] and I started Faces of NASA: We wanted to make that connection. It's not just rockets, astronauts, and telescopes. Hundreds of thousands of people come together to make these missions possible, and that's the part that's really interesting for me. "I like to hold a mirror to other people, and in every Faces of NASA interview, I try to hold a mirror up to what the person has accomplished to get them to be proud of it. For many of those people, it's the first time they have to self-reflect. "That's what's really nice about [the Faces of NASA project]. Everyone who works here is just living day-to-day, so when they have an opportunity to stop for a moment and look back on how far they've come... it's the best feeling for both of us. They're like, 'Wow, I've never really stopped to think about how much I've accomplished or how far I've come.' And I get to share that moment with them. That's my favorite part of Faces of NASA." NASA Communications Strategist, Thalia Patrinos, poses for a portrait, Thursday, July 11, 2024, in Washington. Photo Credit: (NASA/Aubrey Gemignani)