
Senior Software Engineer Taylor Whitaker reports the results of a drawbar pull run to Astrobotic staff outside of the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
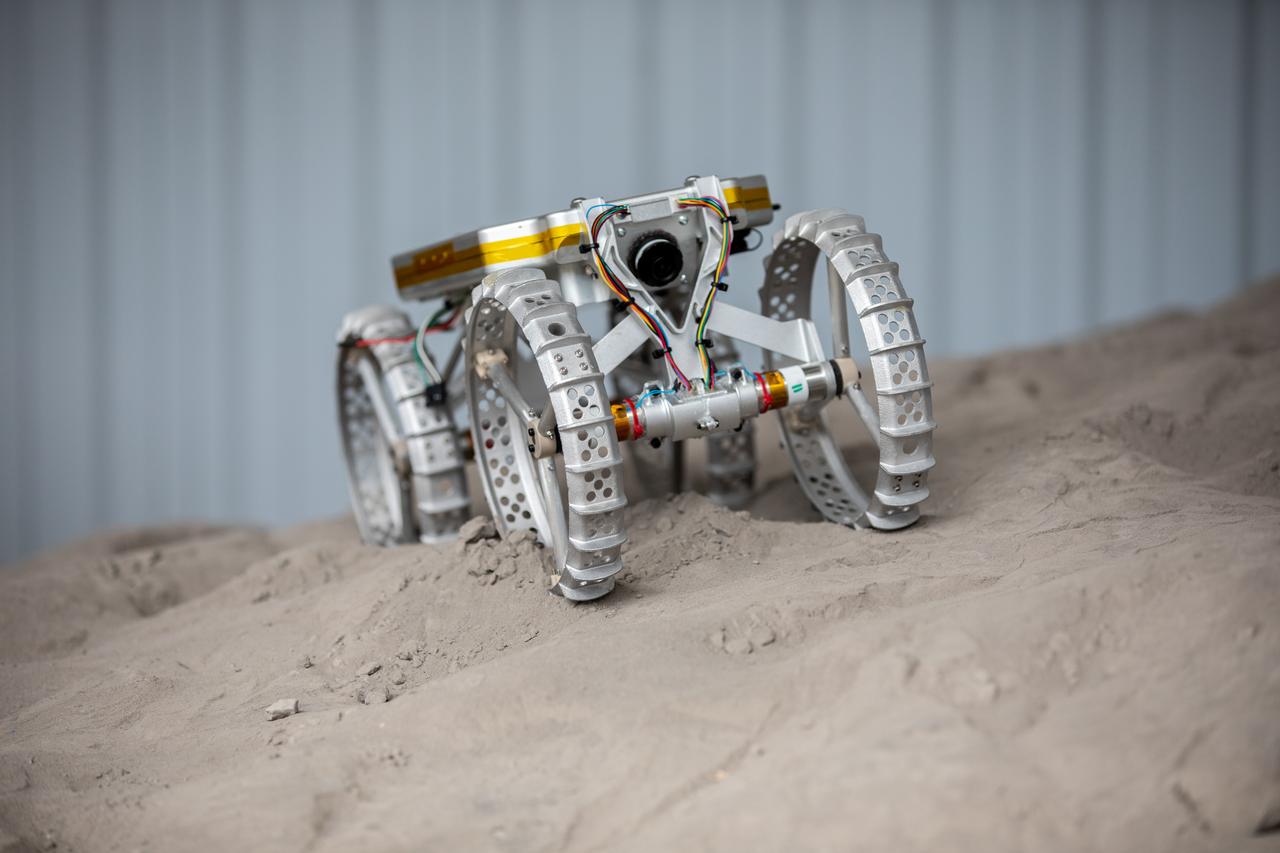
Astrobotic’s CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – undergoes mobility testing inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Kennedy Space Center Director Bob Cabana speaks to employees at the Florida spaceport during the annual KickStart Innovation Expo. The event gives employees an opportunity to present proposals for new ideas and processes. A small amount of funding is awarded to those selected allowing individuals or teams to procure needed items to implement their projects. Kennedy employees are encouraged to look for ways to do their work better and to propose concepts for tackling future mission needs.

Kennedy Space Center Director Bob Cabana speaks to employees at the Florida spaceport during the annual KickStart Innovation Expo. The event gives employees an opportunity to present proposals for new ideas and processes. A small amount of funding is awarded to those selected allowing individuals or teams to procure needed items to implement their projects. Kennedy employees are encouraged to look for ways to do their work better and to propose concepts for tackling future mission needs.
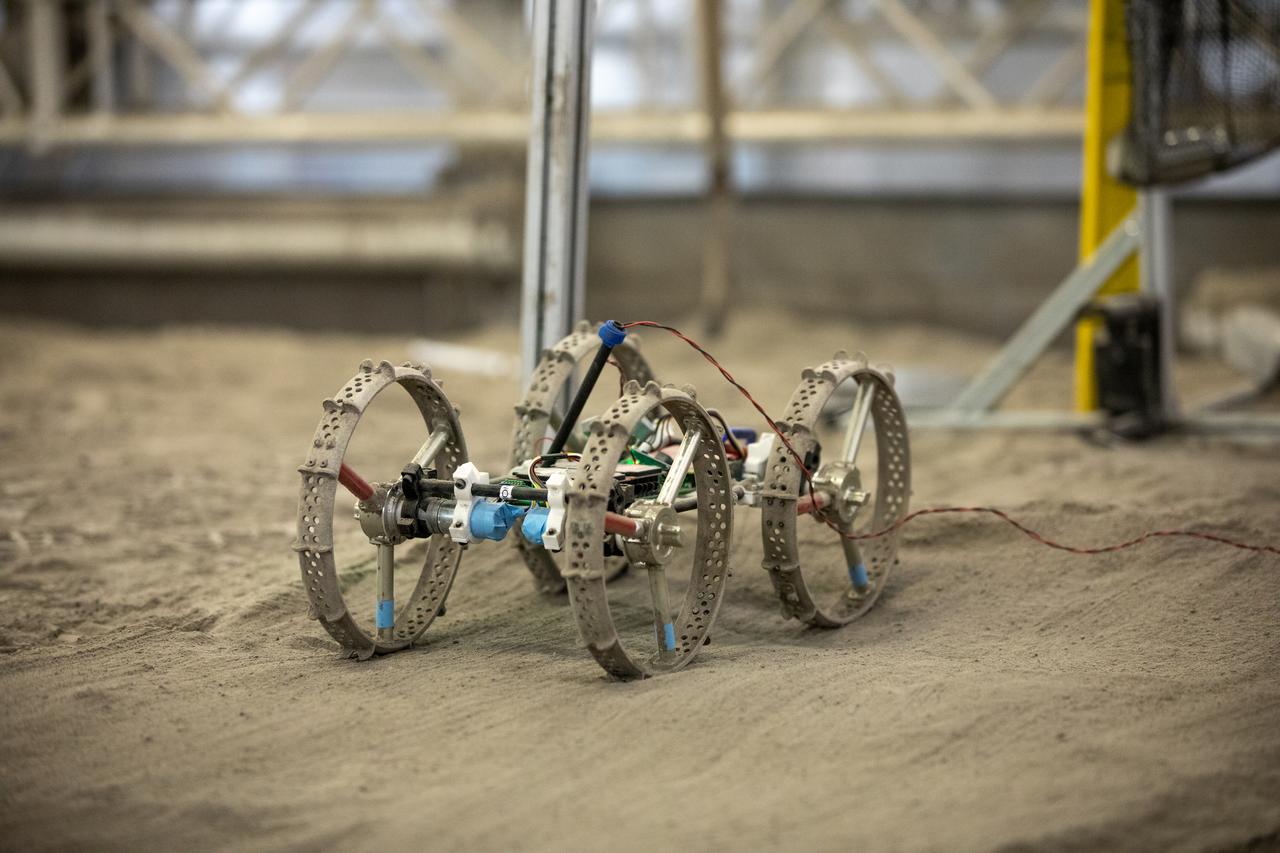
A mass-offloaded version of Astrobotic’s CubeRover – a lightweight, modular planetary rover – is used to simulate mobility in low lunar gravity inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Senior Software Engineer Taylor Whitaker stages Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – for a drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Robotics Software Engineer II Chris Rampolla runs benchtop verifications on Astrobotic’s CubeRover – a lightweight, modular planetary rover – before delivery to Swamp Works at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is planning to use Swamp Work’s Granular Mechanics and Regolith Operations Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Robotics Software Engineer II Chris Rampolla (right) and Software Engineering intern Ashten Akemoto issue commands to Astrobotic’s CubeRover using the company’s ground software during mobility testing at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the spaceport’s Swamp Works facility and the Granular Mechanics and Regolith Operations Laboratory to conduct mobility testing of their rover. The laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, will help depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award has provided additional funding for continued development into a more mature rover.

Senior Software Engineer Taylor Whitaker (right) and Software Engineering intern Ashten Akemoto create a mobility routine for Astrobotic’s CubeRover – a lightweight, modular planetary rover – using the company’s ground software at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the spaceport’s Swamp Works facility and the Granular Mechanics and Regolith Operations Laboratory to conduct mobility testing of their rover. The laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, will help depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
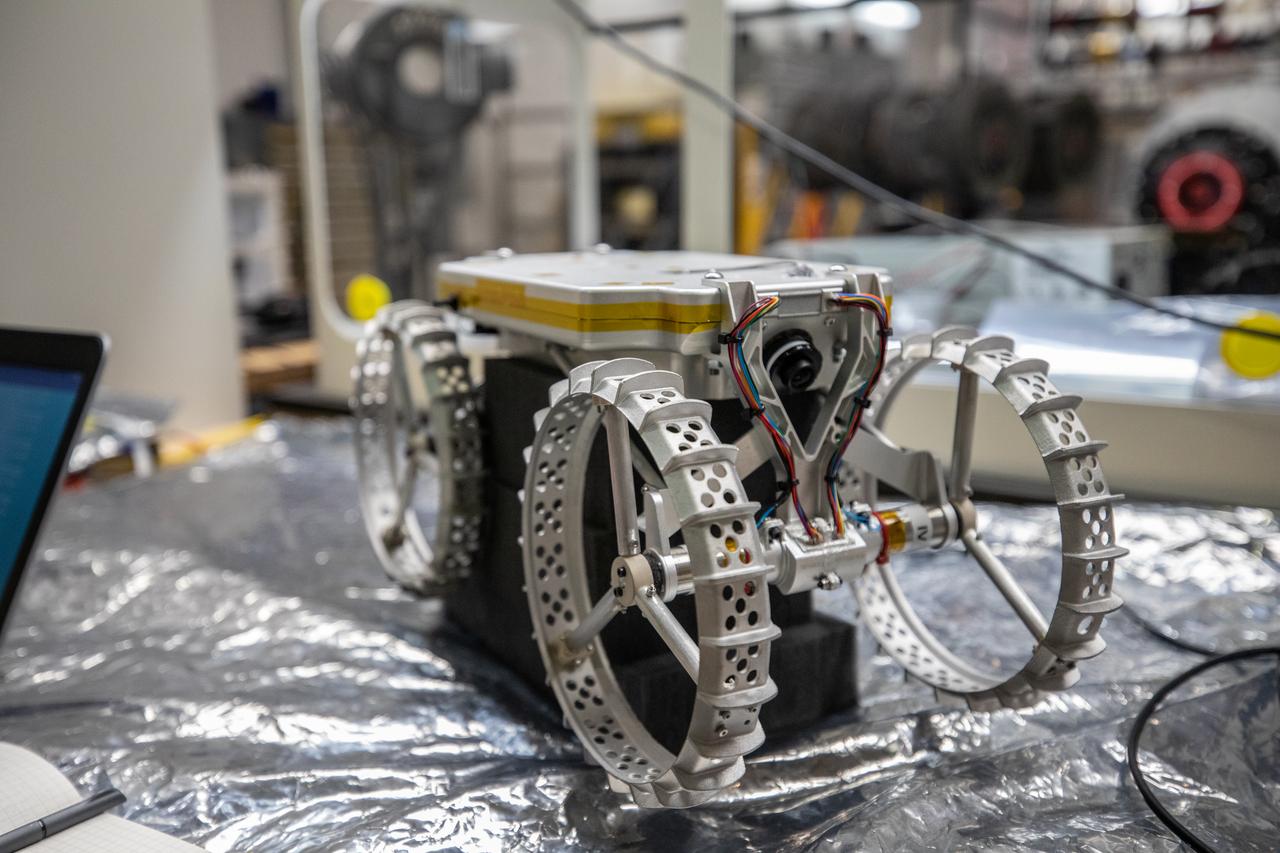
Astrobotic’s CubeRover – a lightweight, modular planetary rover – is photographed in its benchtop testing configuration at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is planning to use the spaceport’s Swamp Works facility and Granular Mechanics and Regolith Operations Laboratory to conduct mobility testing of their rover. The laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, will help depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
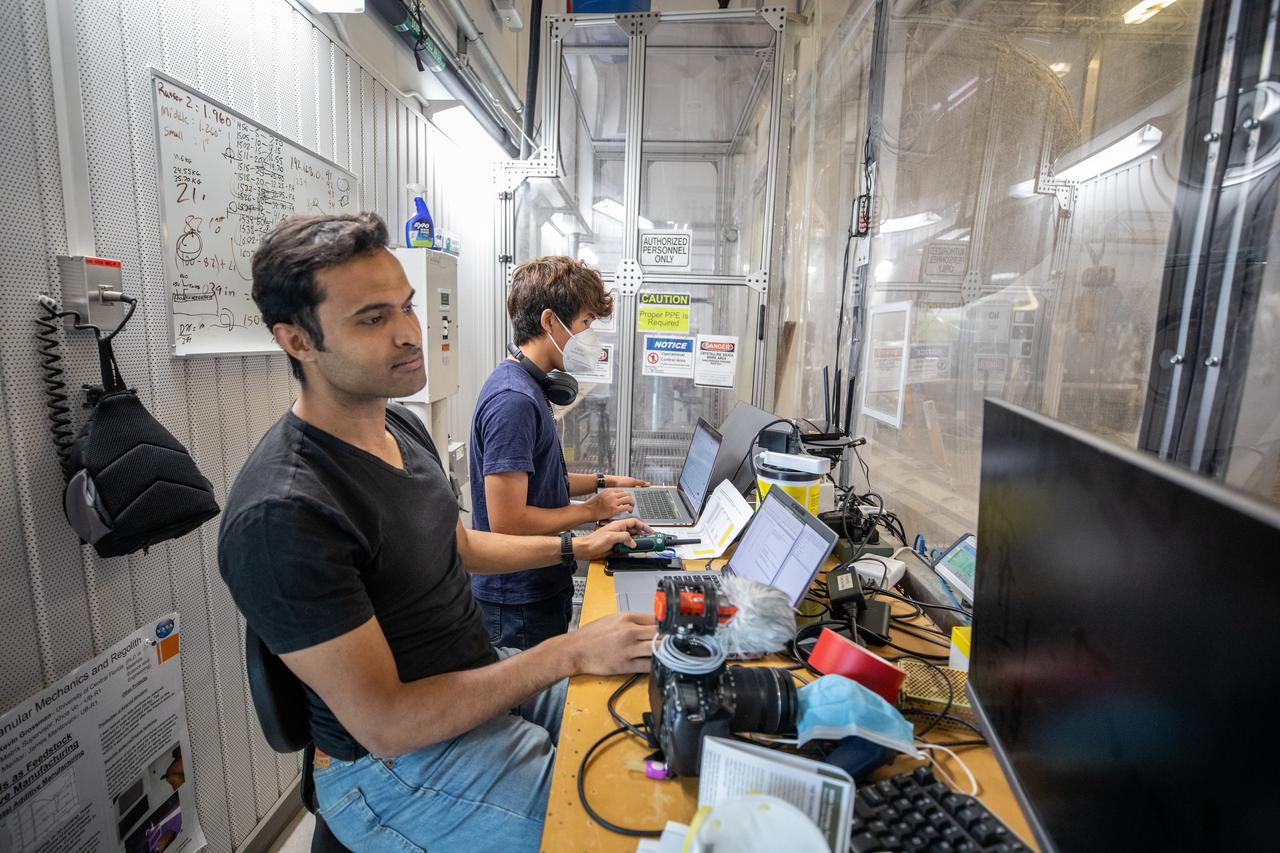
Senior Embedded Software Engineer Aamer Almujahed (left) and Software Engineering intern Ashten Akemoto run the ground software for Astrobotic’s CubeRover drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

This poster artfully depicts Solar Surfing, an early stage NASA study to support potential future missions that could travel closer to the Sun’s surface than ever before. The solar transition region, a very thin layer near the Sun’s surface, is of great interest to heliophysicists. In this zone, temperatures range from 10,000 to 1.8 million degrees Fahrenheit. The NASA Innovative Advanced Concepts (NIAC) program funds a study by a team at NASA’s Kennedy Space Center in Florida to further research a novel, highly reflective coating for a solar shield that could allow spacecraft to approach the Sun close enough to investigate this exciting region – about 500,000 miles from the surface. The better heliophysicists understand the Sun and how it generates energy, the better they can make predictions of the Sun’s effect on our planet – and improve our everyday communications, electronics, and transportation.

Derek Abramson, left, chief engineer for the Dale Reed Subscale Flight Research Laboratory, and Justin Link, small unmanned aircraft system pilot, carry the atmospheric probe model and a quad rotor remotely piloted aircraft to position it for flight on Oct. 24, 2024. John Bodylski, probe principal investigator, right, and videographer Jacob Shaw watch the preparations. Once at altitude, the quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent to NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

Robert “Red” Jensen removes a major component from an aircraft mold for assembly of a prototype of an atmospheric probe as Justin Hall watches at NASA’s Armstrong Flight Research Center in Edwards, California.

An atmospheric probe model attached upside down to a host quad rotor remotely piloted aircraft lifts off on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

The atmospheric probe model flies free after release from a quad rotor remotely piloted aircraft above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California, on Oct. 22, 2024. The probe was designed and built at the center.

An atmospheric probe model is attached upside down to a quad rotor remotely piloted aircraft on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

Justin Hall, left, chief pilot of small unmanned aircraft systems, carries the atmospheric probe at NASA’s Armstrong Flight Research Center in Edwards, California. The probe, which was designed and built at the center, flew after release from a quad rotor remotely piloted aircraft on Oct. 22, 2024, above Rogers Dry Lake, a flight area adjacent to the NASA center. At right, Justin Link, unmanned aircraft systems pilot, checks out the controllers for the two aircraft.

The atmospheric probe model flies free after release from a quad rotor remotely piloted aircraft above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California, on Oct. 22, 2024. The probe was designed and built at the center.

Justin Hall bonds pieces of a cradle for a rotorcraft launch system for a proposed atmospheric probe set to fly in summer 2024 at NASA’s Armstrong Flight Research Center in Edwards, California. Hall is a designer, technician, and pilot at the center’s Dale Reed Subscale Flight Research Laboratory.

Justin Hall, chief pilot of small unmanned aircraft systems, prepares the atmospheric probe for flight above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. At right, Justin Link, small unmanned aircraft systems pilot, assists. The probe, designed and built at the center, flew after release from a quad rotor remotely piloted aircraft on Oct. 22, 2024.

Robert “Red” Jensen and Justin Hall position an atmospheric probe, its host cradle, and the rotorcraft that will air launch the probe at NASA’s Armstrong Flight Research Center in Edwards, California. Jensen and Hall are designers, technicians, and pilots at the center’s Dale Reed Subscale Flight Research Laboratory.

Justin Link, left, small unmanned aircraft systems pilot, and Justin Hall, chief pilot of small unmanned aircraft systems, prepare an atmospheric probe model for flight on Oct. 22, 2024. A quad rotor remotely piloted aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

An atmospheric probe model attached upside down to a quad rotor remotely piloted aircraft ascends with the Moon visible on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

An atmospheric probe model attached upside down to a quad rotor remotely piloted aircraft ascends with the Moon visible on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

Justin Hall assembles parts of a cradle for a rotorcraft that will air launch a proposed atmospheric probe in summer 2024 at NASA’s Armstrong Flight Research Center in Edwards, California. Hall is a designer, technician, and pilot at the center’s Dale Reed Subscale Flight Research Laboratory.
John Bodylski holds a balsa wood model of his proposed aircraft that could be an atmospheric probe. Directly in front of him is a fully assembled version of the aircraft and a large section of a second prototype at NASA’s Armstrong Flight Research Center in Edwards, California.

Justin Hall, left, and Robert “Red” Jensen, at NASA’s Armstrong Flight Research Center in Edwards, California, add layers of carbon fiber and foam in a mold. Another few layers will be added and then it will be cured about eight hours under vacuum. The parts were later removed from molds, refined, and joined for an aircraft that is designed to be an atmospheric probe.

Derek Abramson, left, chief engineer for the Dale Reed Subscale Flight Research Laboratory, and Justin Link, small unmanned aircraft systems pilot, prepare an atmospheric probe model for flight on Oct. 22, 2024. A quad rotor remotely piloted aircraft released the probe above Rogers Dry Lake, a flight area adjacent to NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

An atmospheric probe model attached upside down to a quad rotor remotely piloted aircraft ascends with the Moon visible on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

Justin Hall holds a mold of the top section of an atmospheric probe. The probe is incorporated into part of a modified cradle for a rotorcraft, which will air launch the probe in summer 2024 at NASA’s Armstrong Flight Research Center in Edwards, California. Hall is a designer, technician, and pilot at the center’s Dale Reed Subscale Flight Research Laboratory.

Justin Link, left, unmanned aircraft systems pilot, and Justin Hall, chief pilot for small unmanned aircraft systems, prepare to fly a quad rotor remotely piloted aircraft and an atmospheric probe model on Oct. 22, 2024. John Bodylski, probe principal investigator, watches the preparation for flight. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

Justin Hall, left, and Robert “Red” Jensen work to eliminate the air around an aircraft mold where it will cure for eight hours. The subscale aircraft development at NASA’s Armstrong Flight Research Center in Edwards, California, may result in an atmospheric probe.

A quad rotor remotely piloted aircraft releases the atmospheric probe model above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California, on Oct. 22, 2024. The probe was designed and built at the center.

Justin Link, left, small unmanned aircraft systems pilot; John Bodylski, atmospheric probe principal investigator; and Justin Hall, chief pilot of small unmanned aircraft systems, discuss details of the atmospheric probe flight plan on Oct. 22, 2024. A quad rotor remotely piloted aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

The atmospheric probe, right, flew after release from a quad rotor remotely piloted aircraft, left, on Oct. 22, 2024, above Rogers Dry Lake, a flight area adjacent to NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

An atmospheric probe model attached upside down to a quad rotor remotely piloted aircraft ascends with the Moon visible on Oct. 22, 2024. The quad rotor aircraft released the probe above Rogers Dry Lake, a flight area adjacent NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center.

The atmospheric probe model on a stand is prepped for flight and release from a quad rotor remotely piloted aircraft. The probe successfully flew on Oct. 22, 2024, above Rogers Dry Lake, a flight area adjacent to NASA’s Armstrong Flight Research Center in Edwards, California. The probe was designed and built at the center. In the background from left are Justin Hall, chief pilot of small, unmanned aircraft systems; Justin Link, small unmanned aircraft systems pilot; communications writer Jay Levine; and John Bodylski, atmospheric probe principal investigator.

CAPE CANAVERAL, Fla. -- Commercial Crew Program (CCP) Manager Ed Mango, left, and Deputy Program Manager Brent Jett host a Program Strategy Forum at NASA's Kennedy Space Center in Florida. The forum was held to update industry partners about NASA's decision to use multiple, competitively awarded Space Act Agreements (SAAs) instead of an Integrated Design Contract for the agency's next phase of developing commercial space transportation system capabilities. Using SAAs instead of a contract will allow NASA to maintain multiple partners, with the flexibility to adjust technical direction, milestones and funding. The move was made so the program could adapt to dynamic budgetary circumstances while maintaining a high level of competition among transportation providers. CCP is helping to mature the design and development of a crew transportation system with the overall goal of accelerating a United States-led capability to the International Space Station. The goal of the program is to drive down the cost of space travel as well as open up space to more people than ever before by balancing industry’s own innovative capabilities with NASA's 50 years of human spaceflight experience. For more information, visit www.nasa.gov/commercialcrew. Photo credit: NASA/Jim Grossmann

Two prototypes for a NASA mission concept called SWIM (short for Sensing With Independent Micro-swimmers) are arranged beside a much smaller nonfunctioning model representing the final envisioned size of the robot: about 5 inches (12 centimeters) long. The plastic prototypes were built at NASA's Jet Propulsion Laboratory in Southern California to demonstrate the feasibility of the concept, a swarm of dozens of self-propelled, cellphone-size robots exploring the waters of icy moons like Jupiter's Europa and Saturn's Enceladus. Delivered to the subsurface ocean by an ice-melting cryobot, the tiny robots would zoom away to look for chemical and temperature signals that could point to life. The prototypes were used in more that 20 rounds of underwater testing in a pair of tanks at JPL and in a competition swimming pool at Caltech in Pasadena. Relying on low-cost, commercially made motors and electronics, the robots are pushed along by two propellers and use two to four flaps for steering. The prototype in the center of the image weighs 3.7 pounds (1.7 kilograms) and is 14.5 inches (37 centimeters) long, 6 inches (15 centimeters) wide, and 2.5 inches (6.5 centimeters) tall, with a volume of 104 cubic inches (1.7 liters). The upgraded prototype at left is slightly bigger: 16.5 inches (42 centimeters) long, 3 inches (7.5 centimeters) tall, with a weight of 5 pounds (2.3 kilograms) and a volume of 140 cubic inches (2.3 liters). In pool tests, the prototype at left demonstrated controlled maneuvering, the ability to stay on and correct its course, and a back-and-forth "lawnmower" exploration pattern. It managed all of this autonomously, without the team's direct intervention. The robot even spelled out "J-P-L." As conceived for spaceflight and represented by the model at right, the robots would have dimensions about three times smaller than these prototypes – tiny compared to existing remotely operated and autonomous underwater scientific vehicles. The swimmers would feature miniaturized, purpose-built parts and employ a novel wireless underwater acoustic communication system for transmitting data and triangulating their positions. Several years more of work would be needed to make such an advanced concept ready for spaceflight. Led by JPL, SWIM development took place from spring 2021 to fall 2024. The project was supported by Phase I and II funding from NASA's Innovative Advanced Concepts program under the agency's Space Technology Mission Directorate. JPL is managed for NASA by Caltech in Pasadena, California. https://photojournal.jpl.nasa.gov/catalog/PIA26425