At a media showcase in the Space Station Processing Facility, reporters and photographers get a close look at the S3/S4 integrated truss segment. The starboard 3/4 truss segment will launch aboard Space Shuttle Atlantis on mission STS-117, targeted for March 15. The element will be added to the 11-segment integrated truss structure, the station's backbone. The integrated truss structure eventually will span more than 300 feet. The S3/S4 truss has two large solar arrays and will provide one-fourth of the total power generation for the completed station.

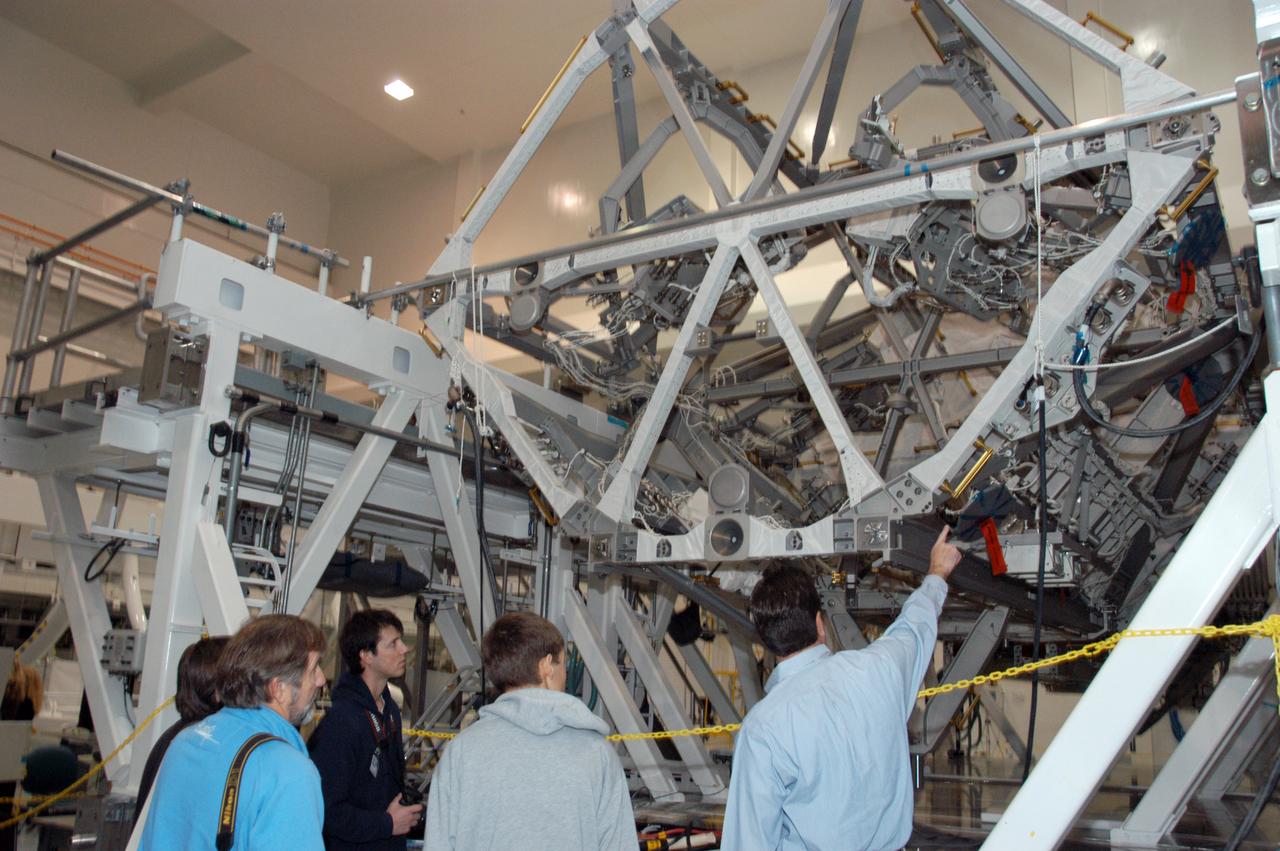
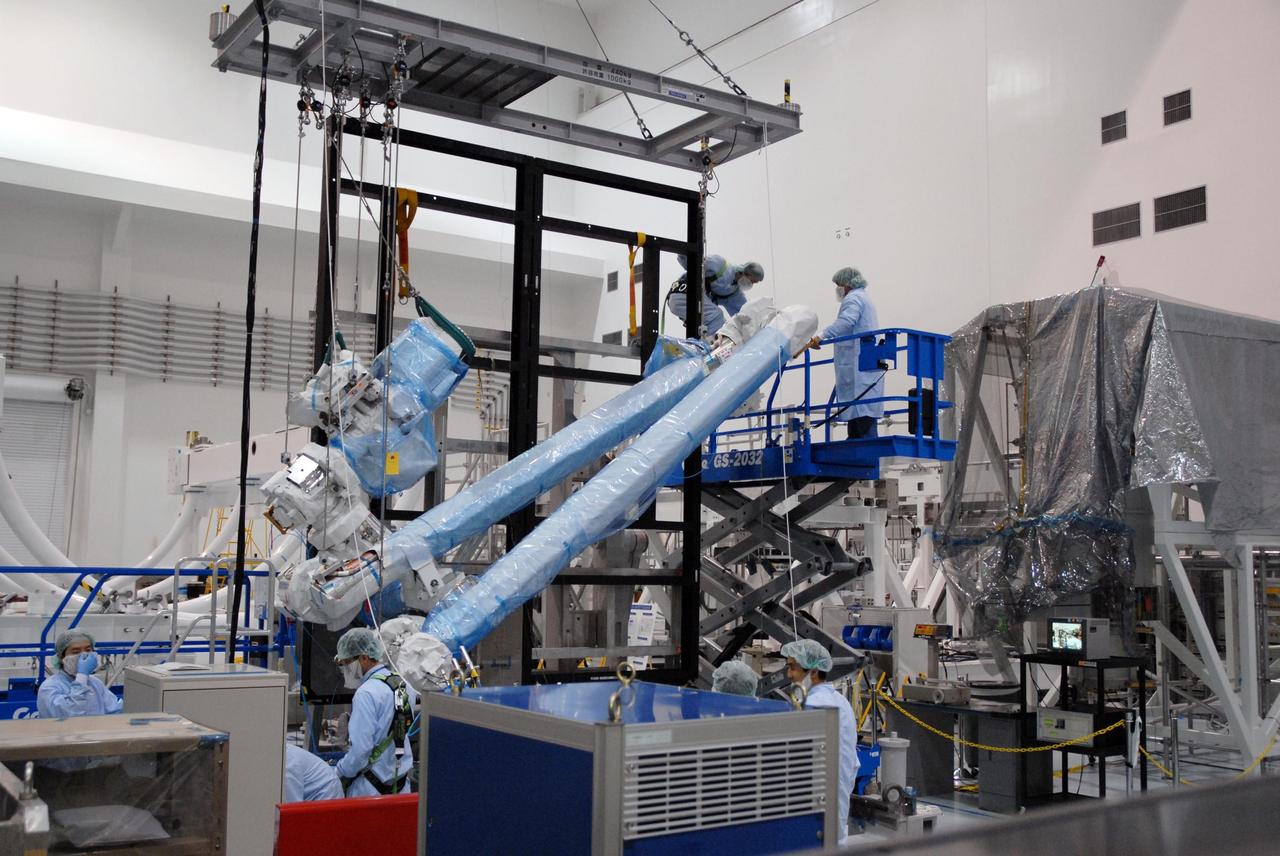
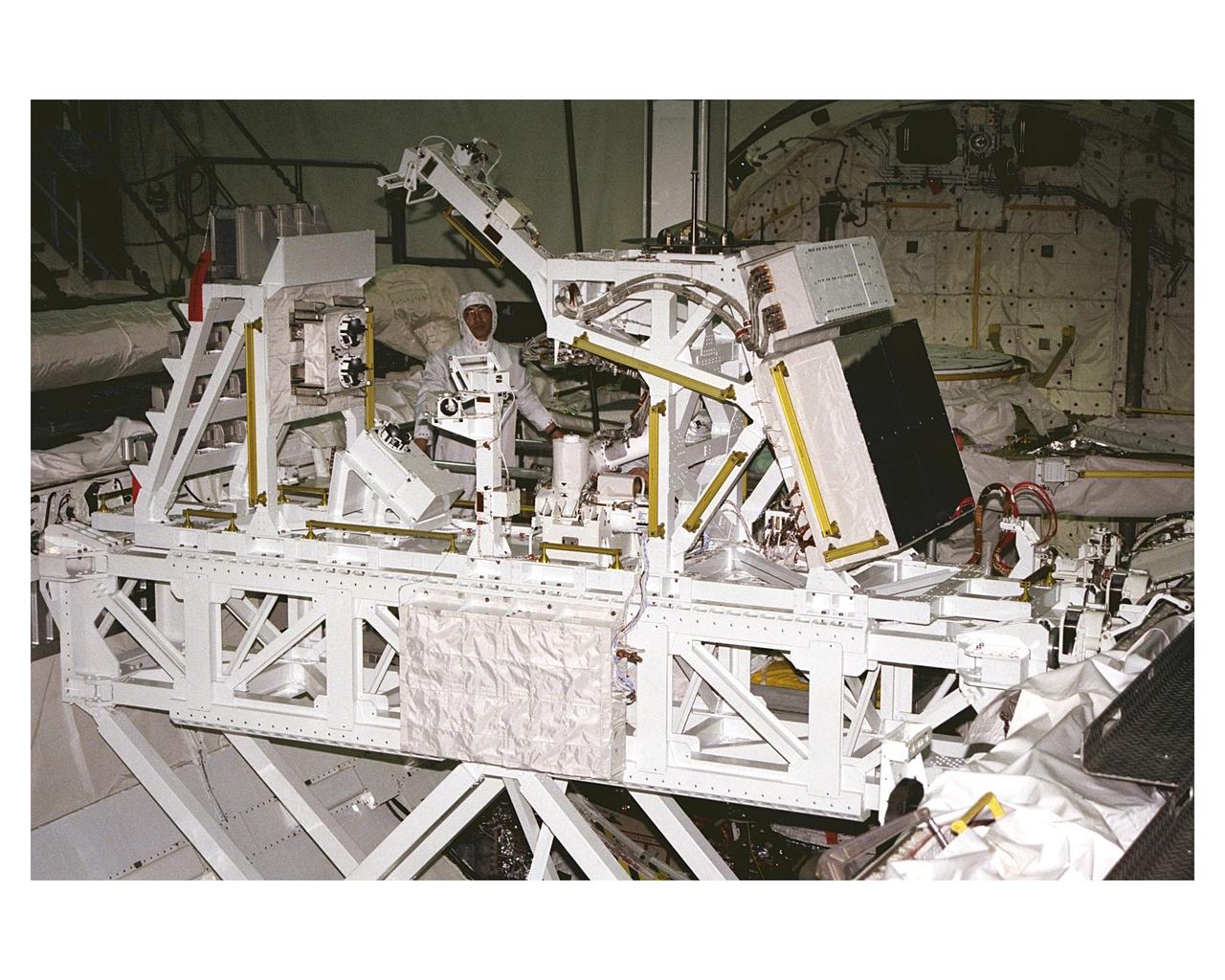
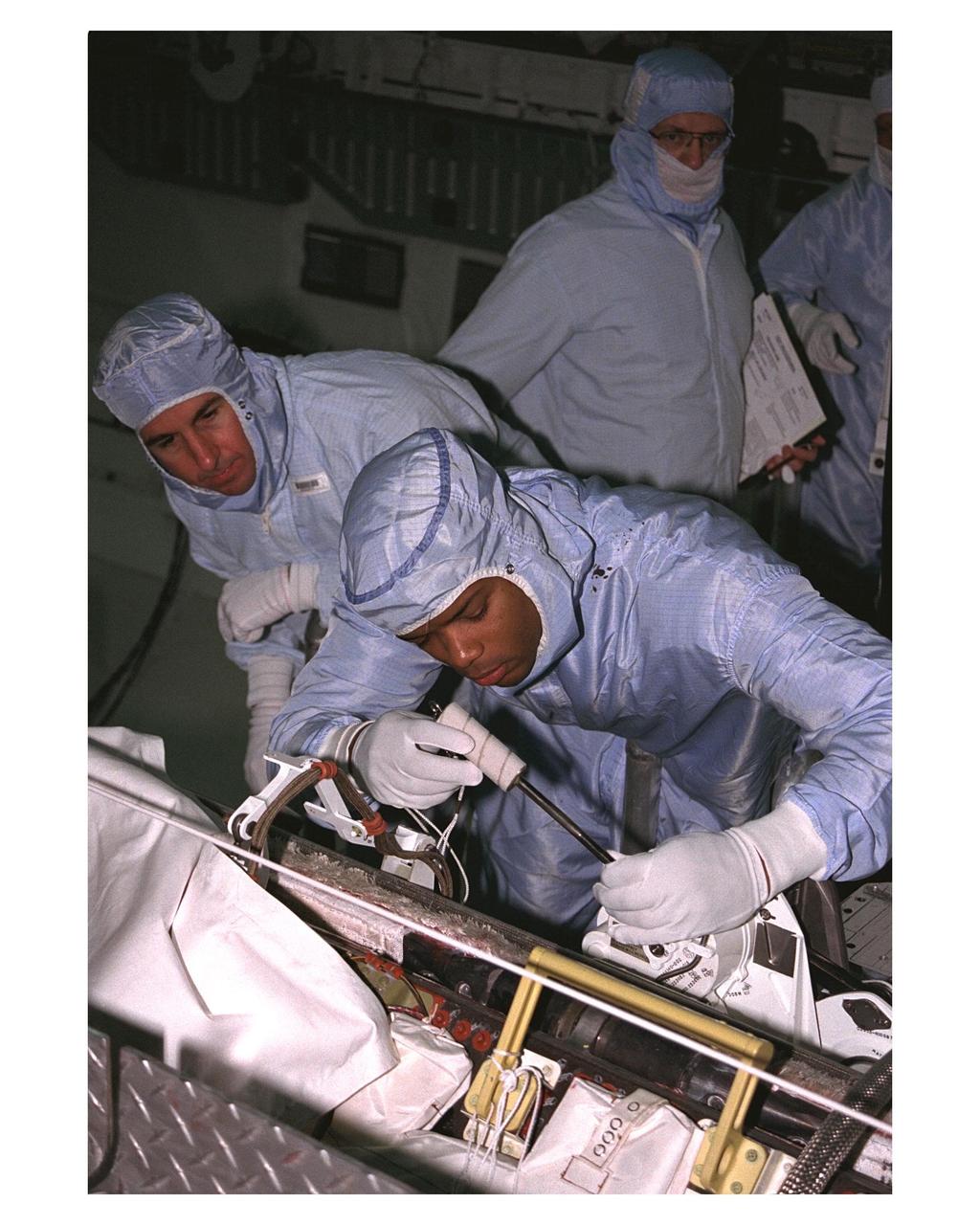
In the Space Station Processing Facility, technicians work on the Japanese remote manipulator system. It is scheduled to fly on a 2008 mission along with the Kibo Japanese Experiment Module Pressurized Module (JEM-PM).

In the Space Station Processing Facility, technicians work on the Japanese remote manipulator system. It is scheduled to fly on a 2008 mission along with the Kibo Japanese Experiment Module Pressurized Module (JEM-PM).

S127-E-006902 (18 July 2009) --- The Japanese Experiment Module - Exposed Facility (JEF) is pictured in the grasp of the Space Shuttle Endeavour's remote manipulator system (RMS) arm during flight day four robotics activity. The International Space Station's remote manipulutor system (SSRMS or Canadarm2) prepares to take the hand-off from the shuttle's robot arm. Astronauts also began a series of five spacewalks on this day to continue work on the International Space Station.

ISS022-E-019992 (6 Jan. 2010) --- Japan Aerospace Exploration Agency astronaut Soichi Noguchi, Expedition 22 flight engineer, is pictured near the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

ISS022-E-019991 (6 Jan. 2010) --- Japan Aerospace Exploration Agency astronaut Soichi Noguchi, Expedition 22 flight engineer, is pictured near the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

ISS022-E-018750 (5 Jan. 2010) --- NASA astronaut Jeffrey Williams, Expedition 22 commander, assembles and configures the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

ISS022-E-018748 (5 Jan. 2010) --- Japan Aerospace Exploration Agency astronaut Soichi Noguchi, Expedition 22 flight engineer, assembles and configures the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.
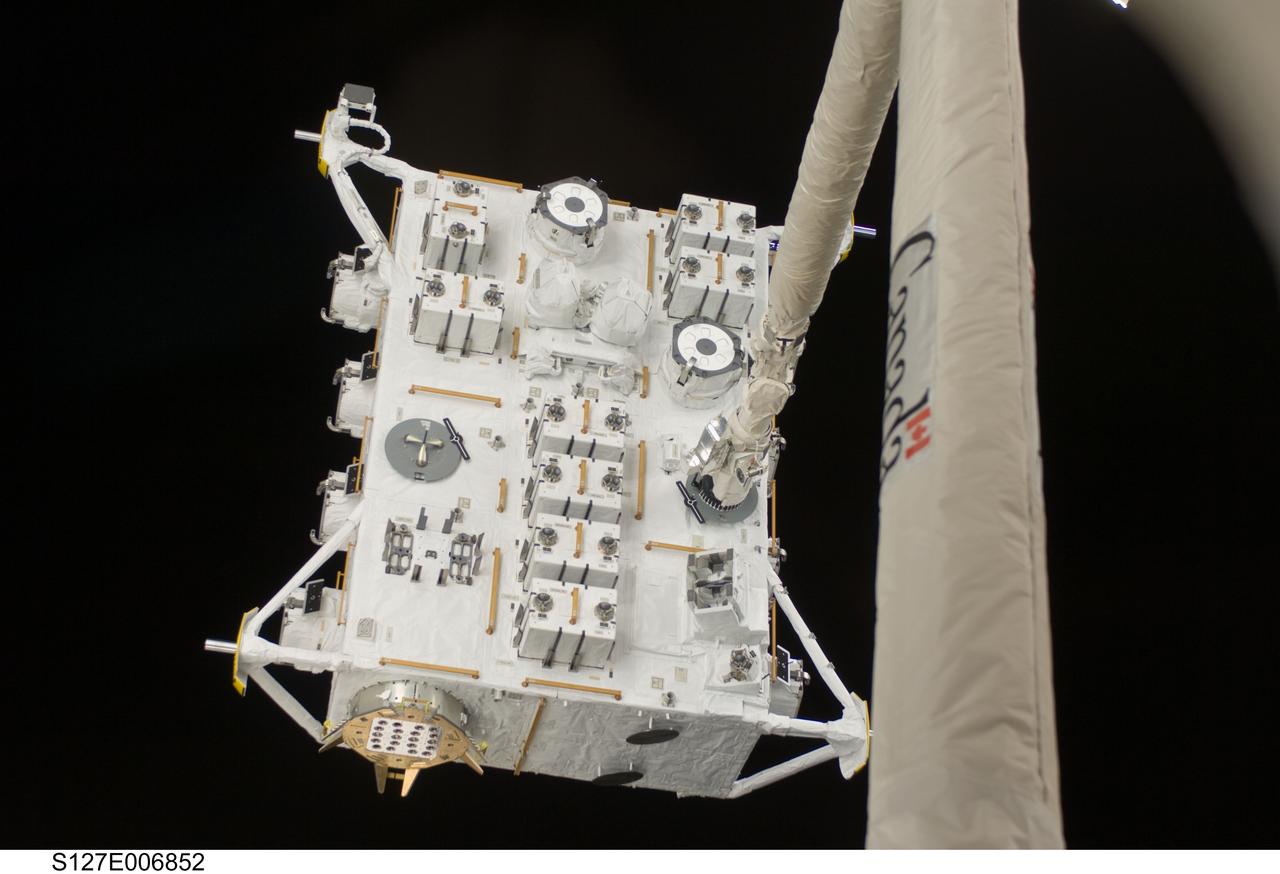
S127-E-006852 (18 July 2009) --- The Japanese Experiment Module - Exposed Facility (JEF) is pictured in the grasp of the Space Shuttle Endeavour's remote manipulator system (RMS) arm during flight day four robotics activity. Astronauts also began a series of five spacewalks on this day to continue work on the International Space Station.

ISS022-E-018747 (5 Jan. 2010) --- NASA astronaut Jeffrey Williams, Expedition 22 commander, assembles and configures the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

S127-E-006835 (18 July 2009) --- The Japanese Experiment Module - Exposed Facility (JEF) is pictured in the grasp of the Space Shuttle Endeavour's remote manipulator system (RMS) arm during flight day four robotics activity. Astronauts also began a series of five spacewalks on this day to continue work on the International Space Station.

ISS022-E-018783 (4 Jan. 2010) --- NASA astronaut T.J. Creamer, Expedition 22 flight engineer, works with the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

S127-E-006853 (18 July 2009) --- The Japanese Experiment Module - Exposed Facility (JEF) is pictured in the grasp of the Space Shuttle Endeavour's remote manipulator system (RMS) arm during flight day four robotics activity. Astronauts also began a series of five spacewalks on this day to continue work on the International Space Station.

iss042e016906 (11/28/2014) --- The Space Station Integrated Kinetic Launcher for Orbital Payload Systems (SSIKLOPS), or Cyclops, launch platform with Special Purpose Inexpensive Satellite (SpinSat) attached is grappled by the Japanese Experiment Module Remote Manipulator System (JEMRMS) small fine Arm (SFA) in preparation for the release of SpinSat.

ISS022-E-019988 (5 Jan. 2010) --- Japan Aerospace Exploration Agency astronaut Soichi Noguchi, Expedition 22 flight engineer, works with the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.
S85-E-5030 (10 August 1997) --- The Manipulator Flight Demonstration (MFD) in the Space Shuttle Discovery's cargo bay will evaluate the use of the Small Fine Arm (SFA) that is planned to be part of the future Japanese Experiment Module's Remote Manipulator System (RMS) on the International Space Station (ISS). The MFD is sponsored by the National Space Development Agency (NASDA).

STS085-751-039 (7 - 19 August 1997) --- This 70mm frame, exposed through aft flight deck windows of the Space Shuttle Discovery, shows experiments in the cargo bay, as the spacecraft was flying over the Sea of Japan. In center foreground is the Manipulator Flight Demonstration (MFD). The MFD, sponsored by National Space Development Agency (NASDA), will evaluate the use of the Small Fine Arm (SFA) that is planned to be part of the future Japanese Experiment Module's (JEM) Remote Manipulator System (RMS) on the International Space Station (ISS).

S85-E-5044 (12 August 1997) --- View of the payload bay of the Earth-orbiting Space Shuttle Discovery looking toward the shuttle's vertical stabilizer with clouds in the background. Easily recognized is the Manipulator Flight Demonstration (MFD), which is sponsored by Japan's National Space Development Agency (NASDA). MFD will evaluate the use of the Small Fine Arm (SFA) that is planned to be part of the future Japanese Experiment Module's Remote Manipulator System (RMS) on the International Space Station (ISS). The photograph was taken with the Electronic Still Camera (ESC).

STS085-316-026 (7 - 19 August 1997) --- Wearing a head band representing the Manipulator Flight Demonstration (MFD) hardware several feet away in the open cargo bay of the Space Shuttle Discovery, astronaut N. Jan Davis, payload commander, performs MFD operations at the experiment's work station. This flight of the MFD is in preparation for the Japanese Experiment Module (JEM) Remote Manipulator System (RMS) Small Fine Arm (SFA).
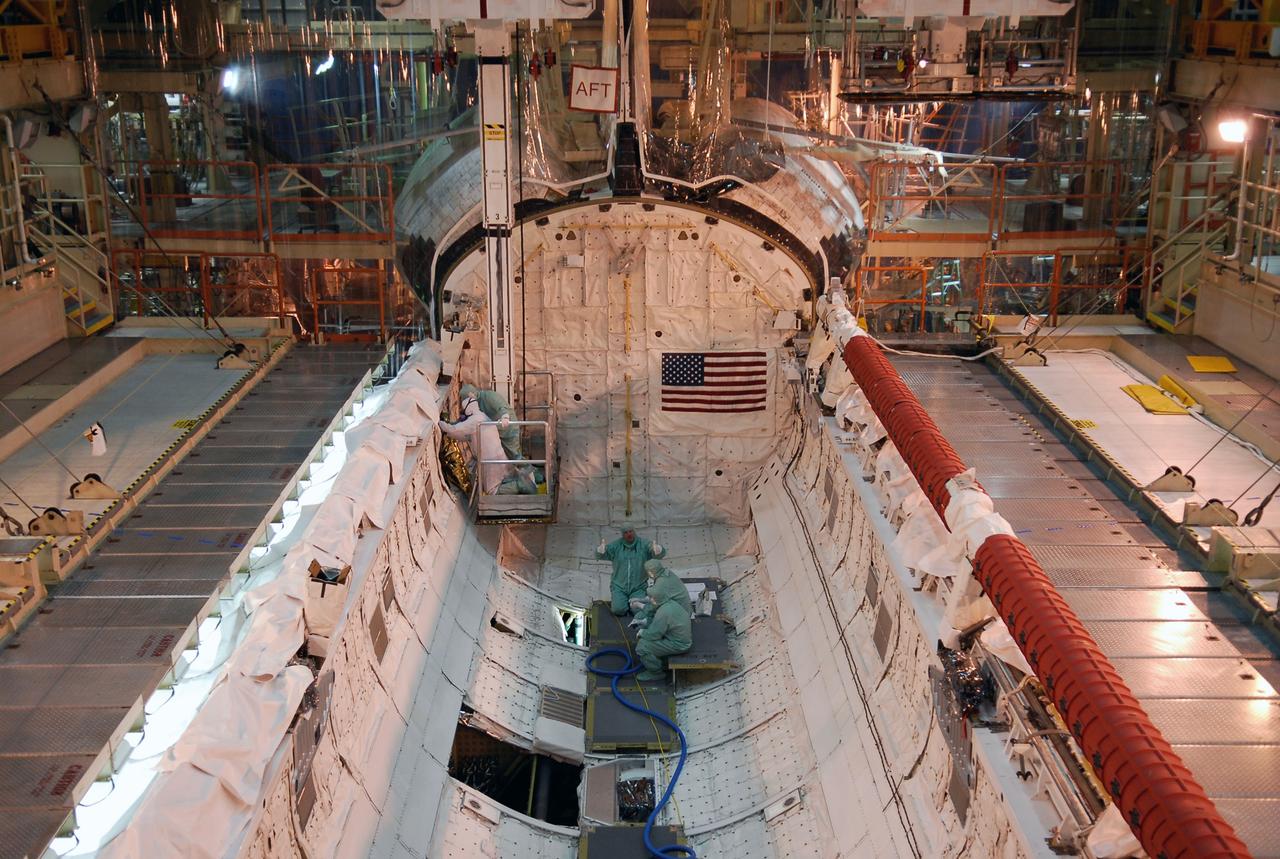
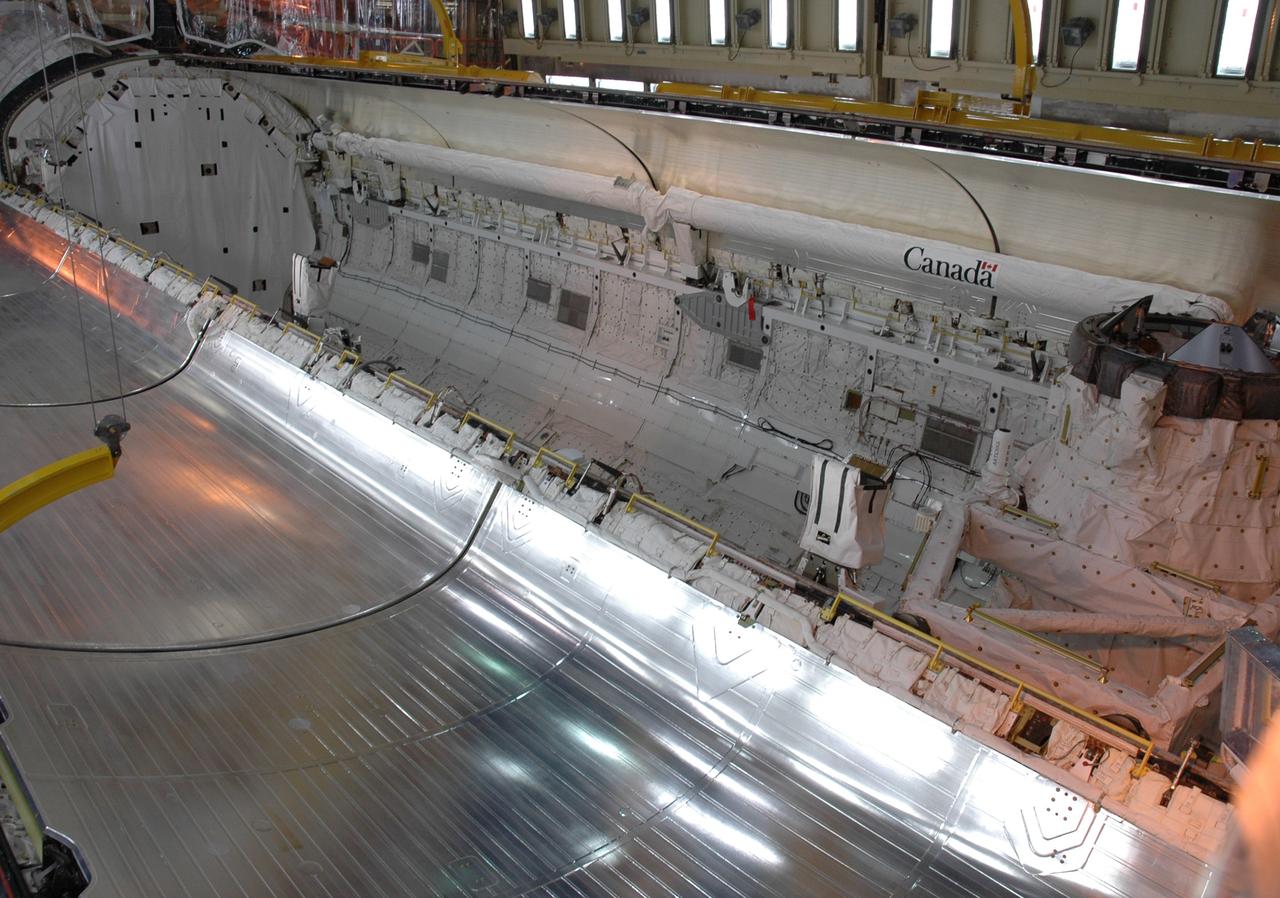
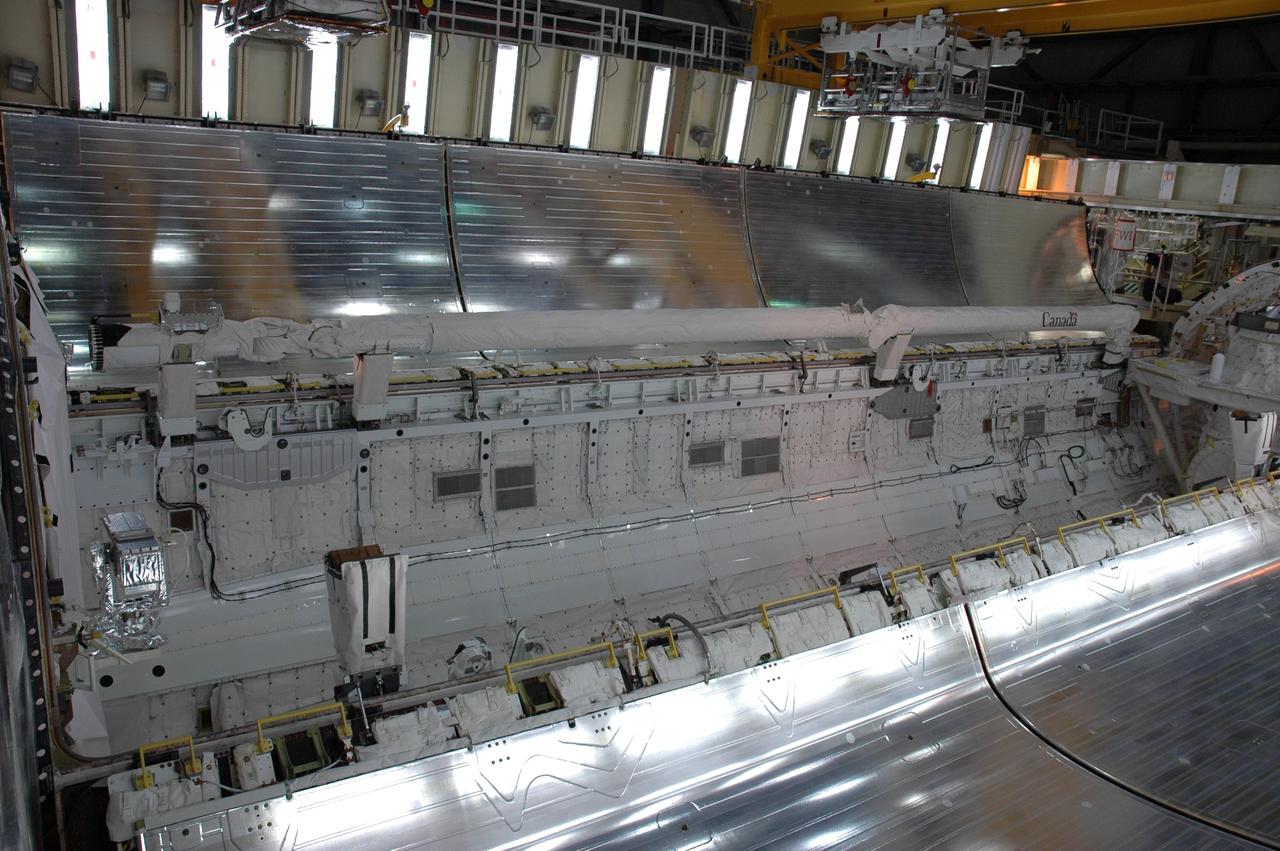
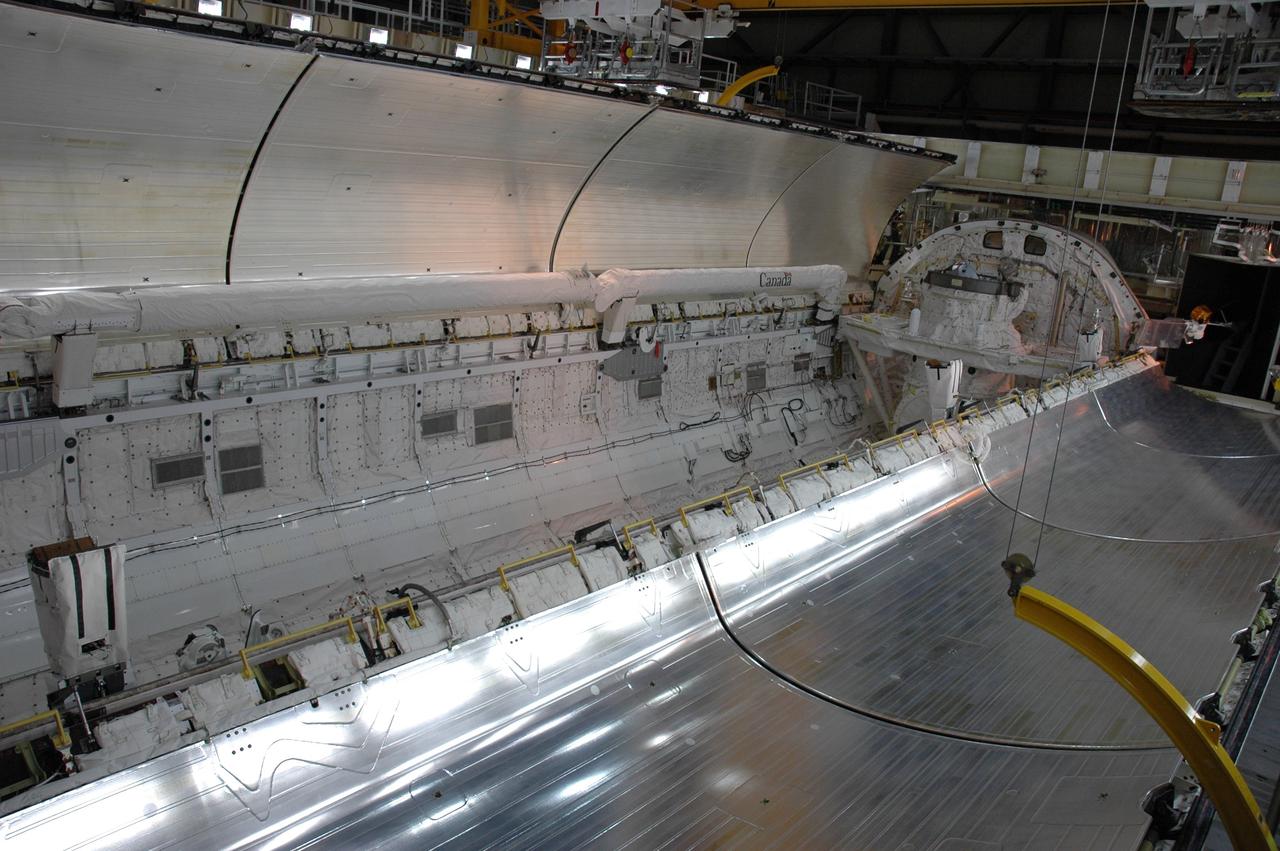
CAPE CANAVERAL, Fla. --- In the Orbiter Processing Facility at NASA's Kennedy Space Center, workers prepare space shuttle Discovery's payload bay for payload installation. The launch of Discovery on its STS-124 mission is targeted for April 24. On the right side is the shuttle's robotic arm. On the mission, Discovery will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System to the International Space Station. Photo credit: NASA/Kim Shiflett
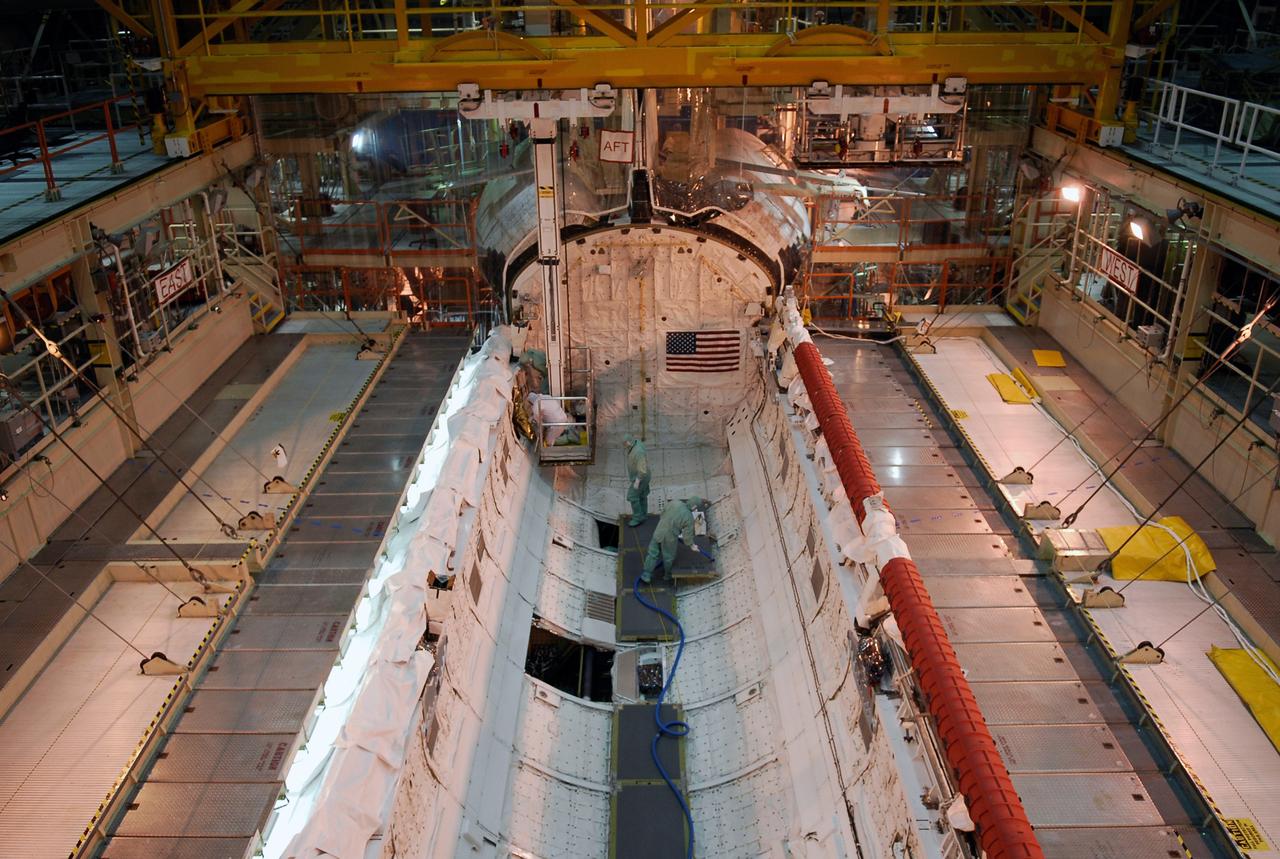
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay door at right is nearly closed. Below the door is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

CAPE CANAVERAL, Fla. --- In the Orbiter Processing Facility at NASA's Kennedy Space Center, workers prepare space shuttle Discovery's payload bay for payload installation. The launch of Discovery on its STS-124 mission is targeted for April 24. On the upper right side is the shuttle's robotic arm. On the mission, Discovery will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System to the International Space Station. Photo credit: NASA/Kim Shiflett
CAPE CANAVERAL, Fla. --- In the Orbiter Processing Facility at NASA's Kennedy Space Center, workers prepare space shuttle Discovery's payload bay for payload installation. The launch of Discovery on its STS-124 mission is targeted for April 24. On the right side is the shuttle's robotic arm. On the mission, Discovery will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System to the International Space Station. Photo credit: NASA/Kim Shiflett
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay doors are ready to close. Along the hinge of the door at left is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay door at left is beginning to close. On the left side of the payload bay is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

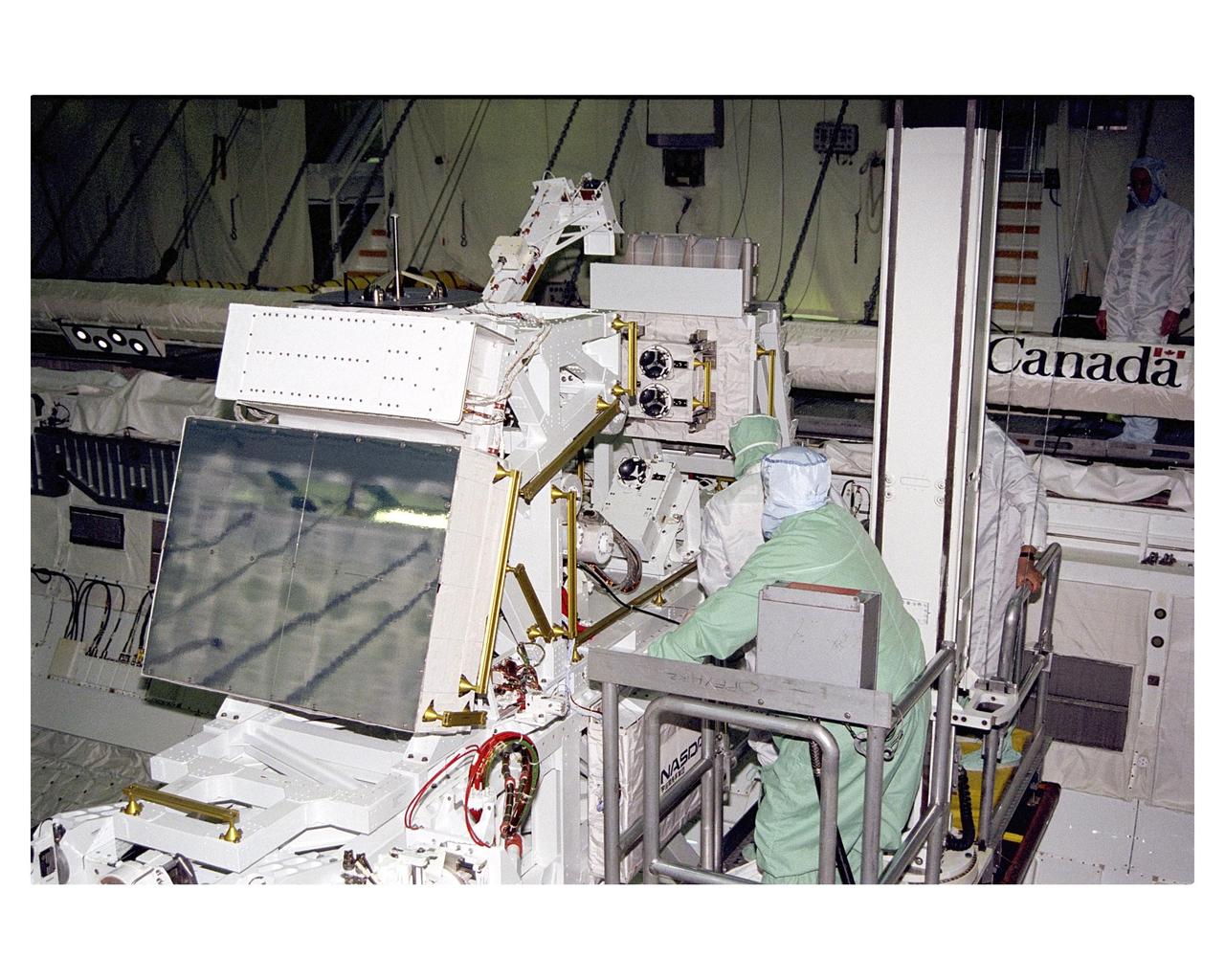
JSC2003-E-42548 (For Release: 18 June 2003) --- The Remote Manipulator System (RMS) Small Fine Arm is shown in a processing facility. The RMS consists of two robotic arms that support operations on the outside of the Japanese Experiment Module (JEM) Japan's primary contribution to the International Space Station. The Main Arm can handle up to seven tons (14,000 pounds) of hardware and the Small Fine Arm, when attached to the Main Arm, handles more delicate operations. Each arm has six joints that mimic the movements of a human arm. Photo Credit: NASA

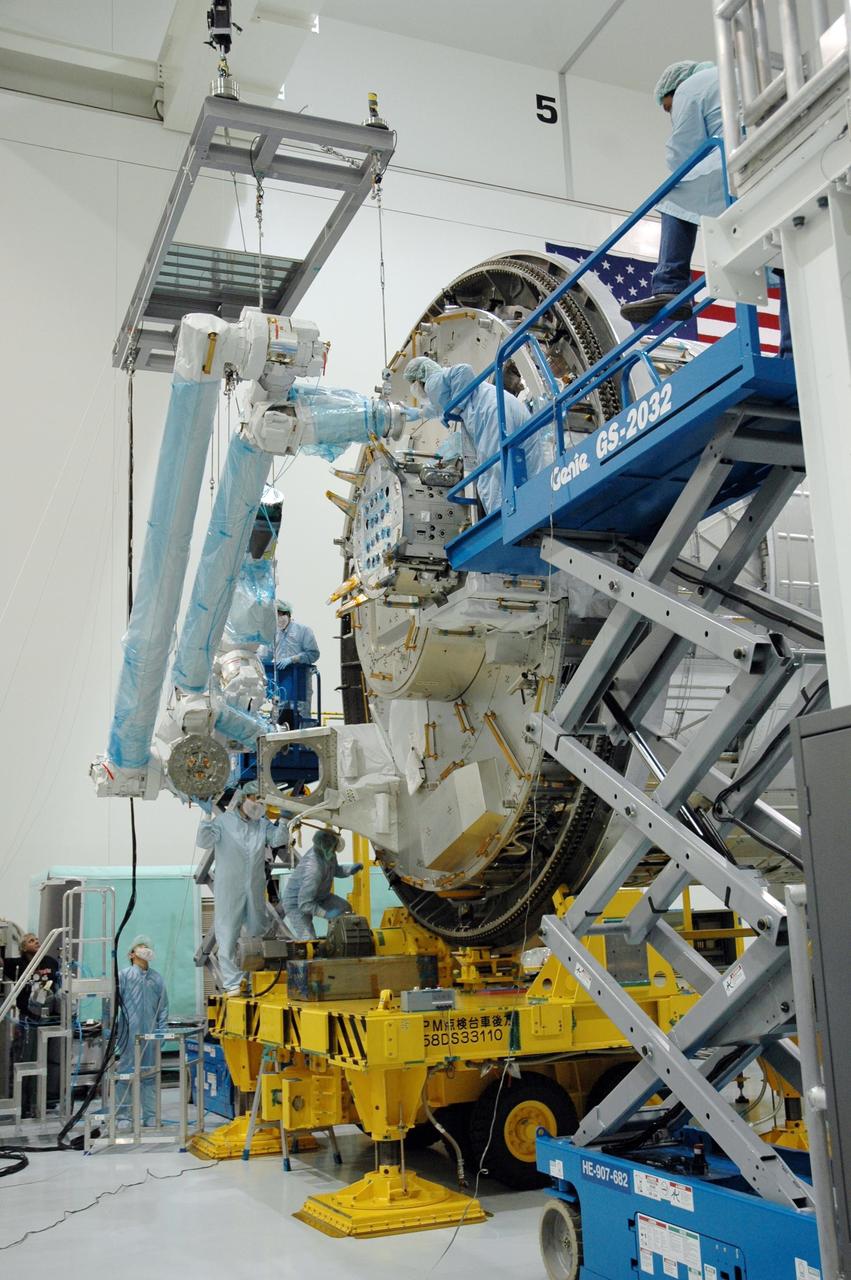
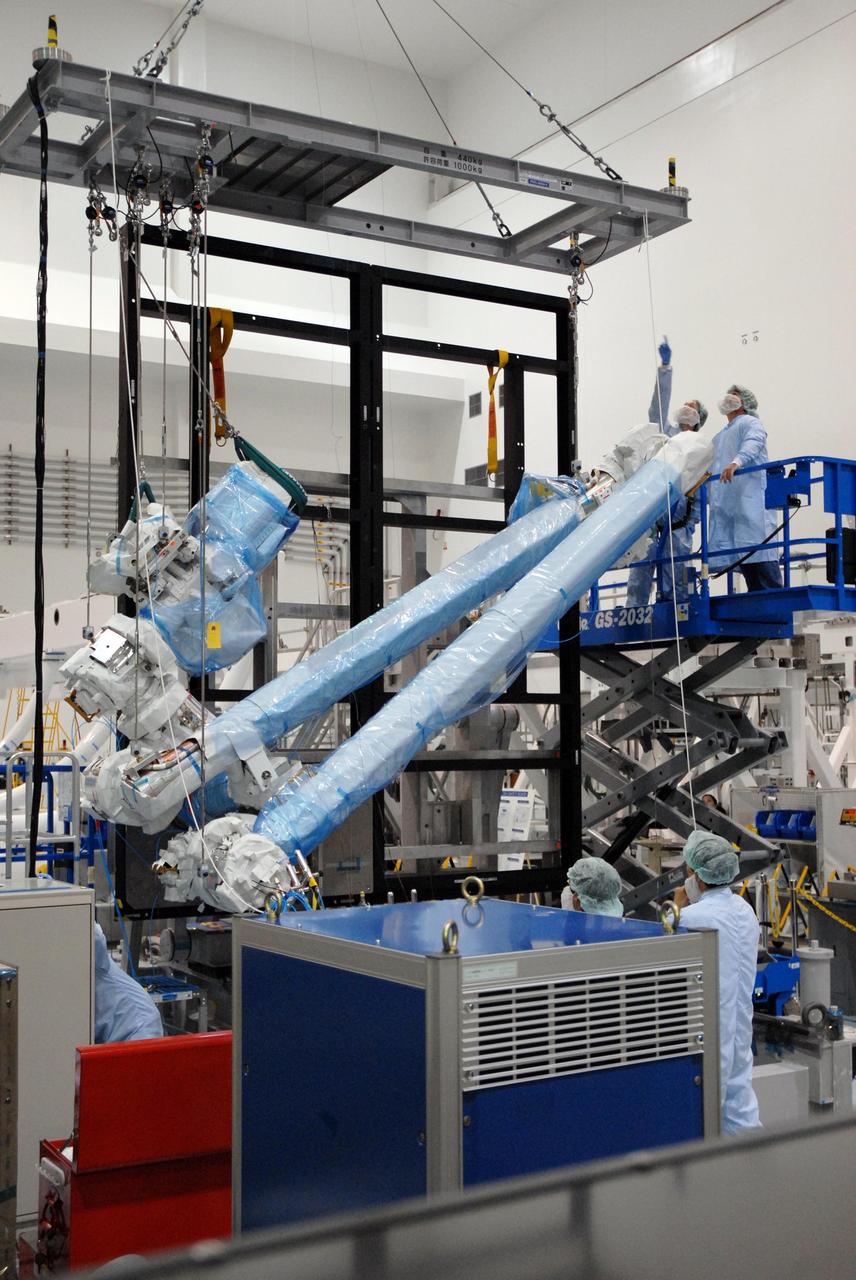
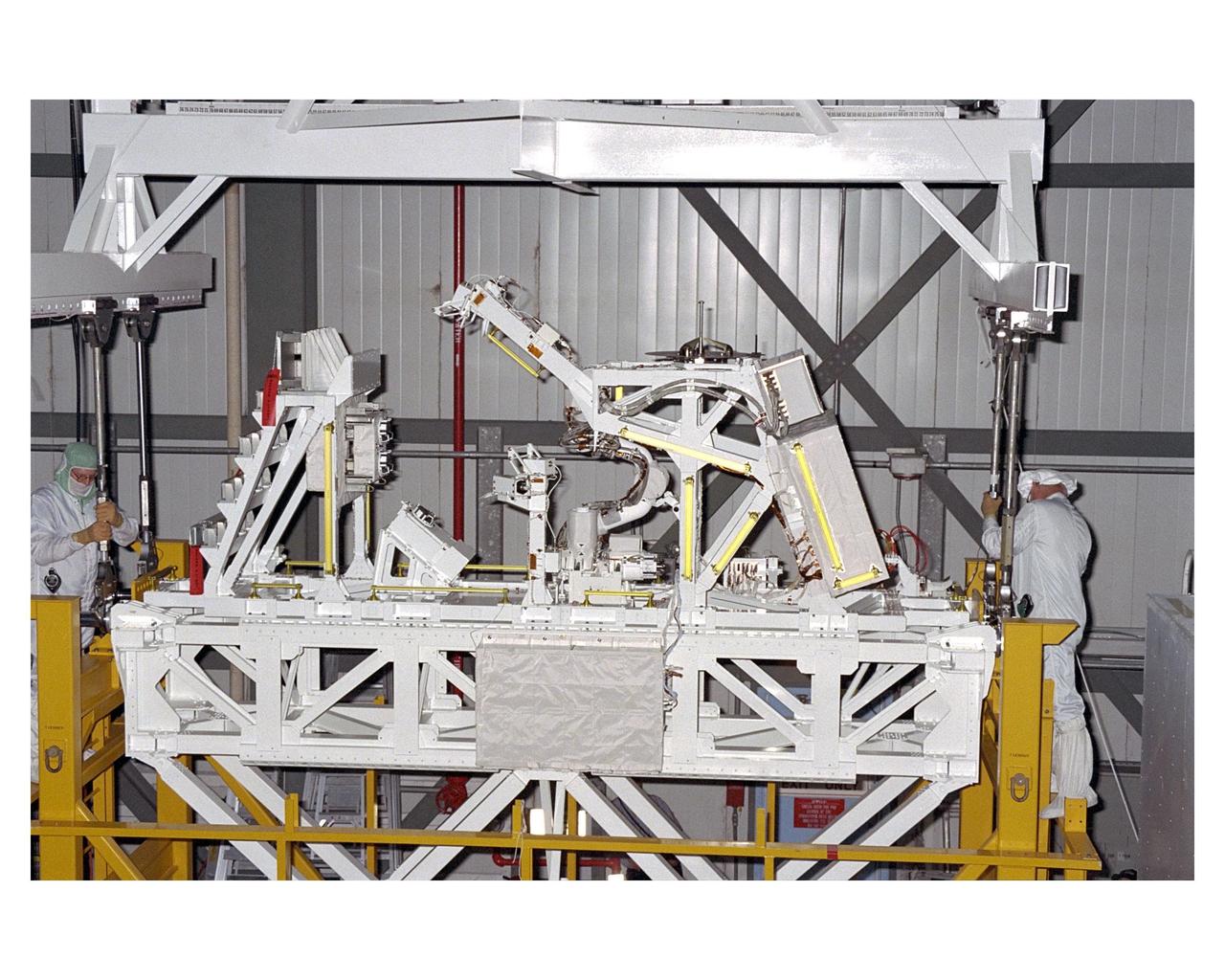
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to a hoisting device to prepare for installation to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to a hoisting device to prepare for installation to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

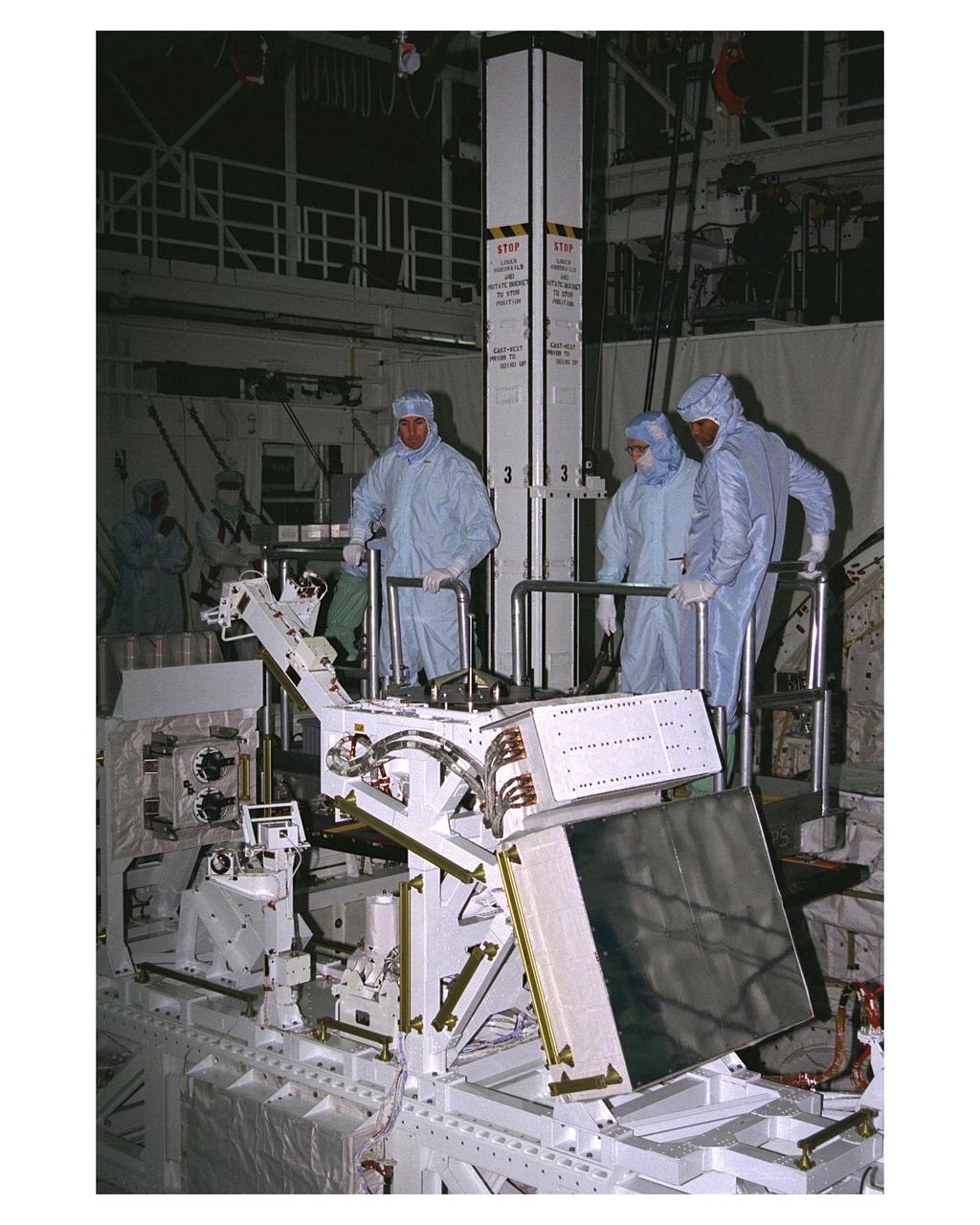
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers from the Japan Aerospace Exploration Agency watch from a control area as the Remote Manipulator System, or robotic arm, is attached to a hoisting device to prepare it for installation to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller
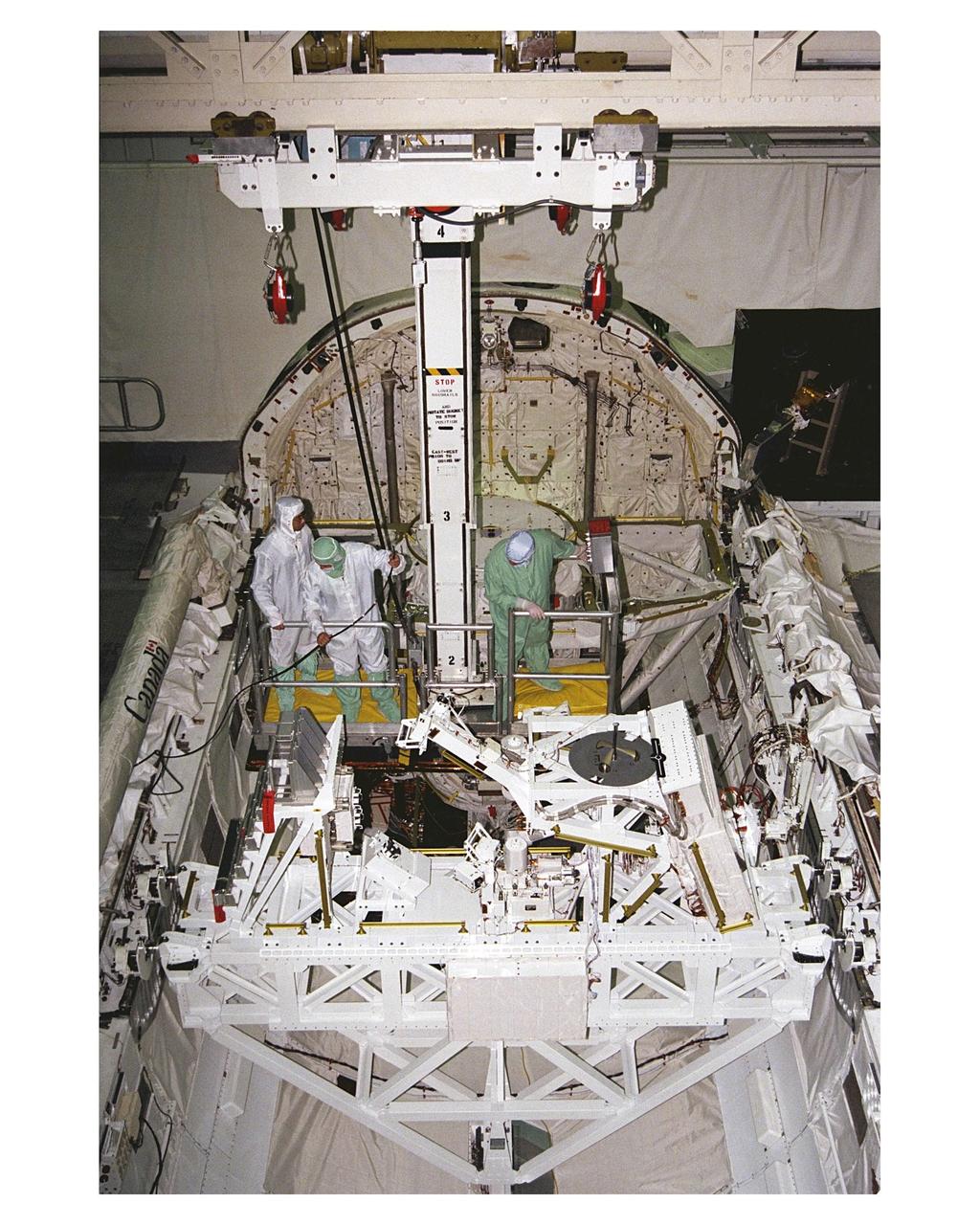
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers use a hoisting device to move the Remote Manipulator System, or robotic arm, toward the Japanese Experiment Module for installation and testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008.The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller
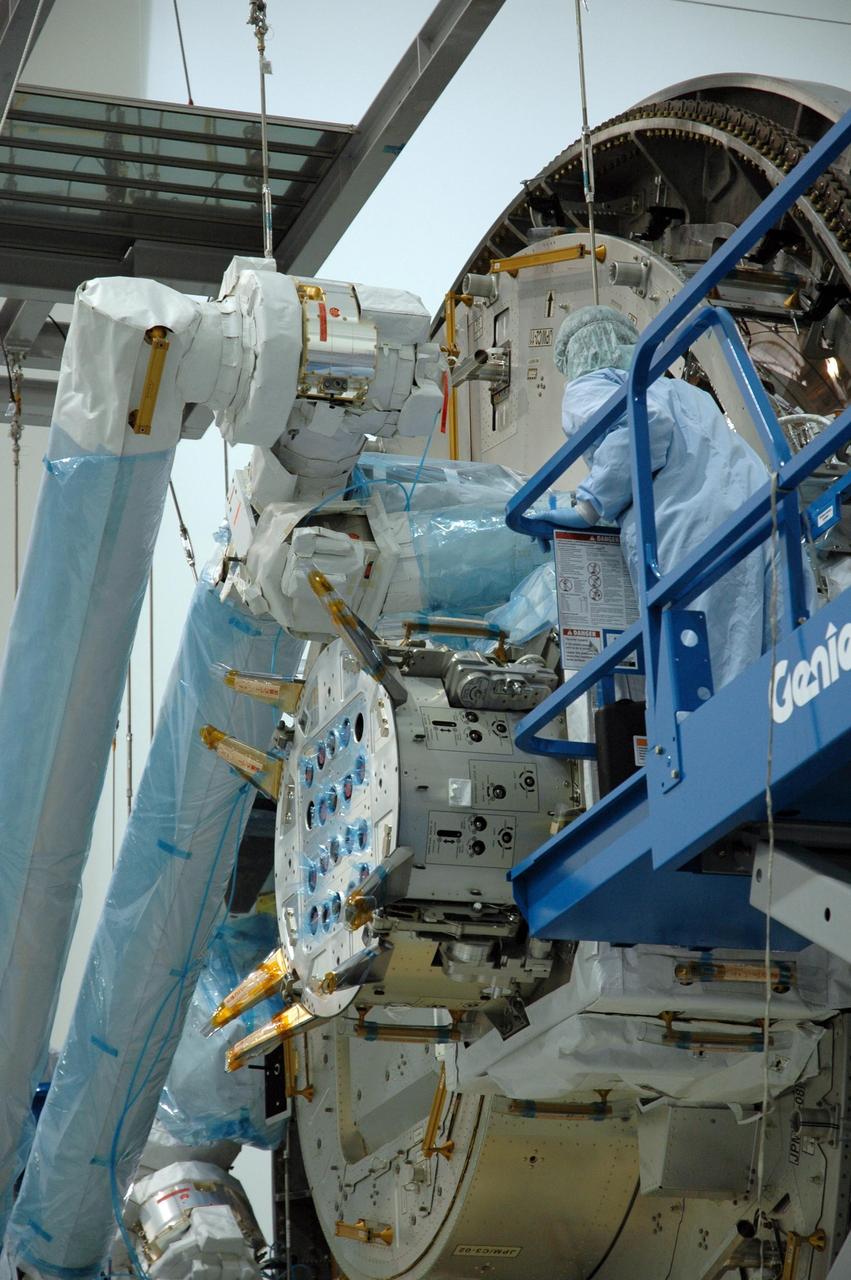
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, a worker helps to attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller
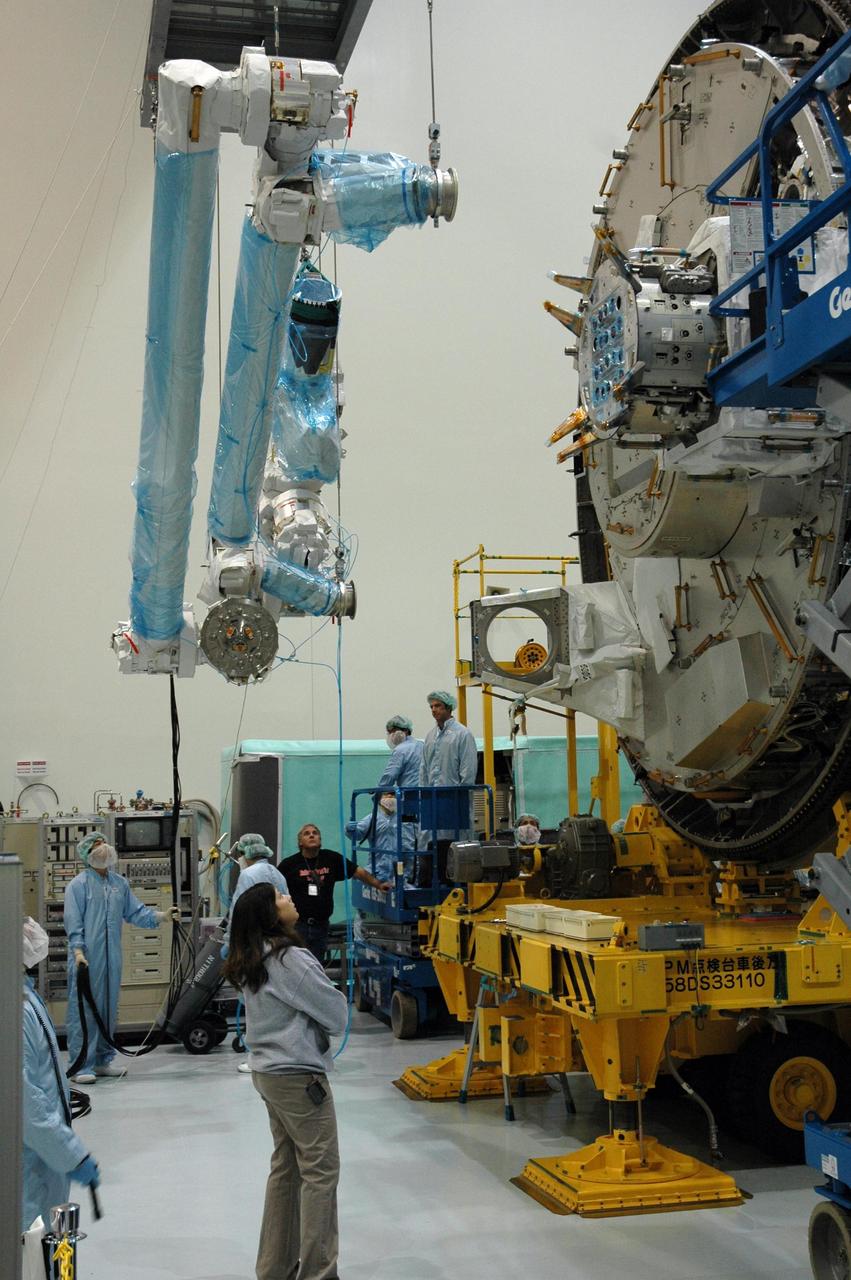
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers use a hoisting device to move the Remote Manipulator System, or robotic arm, toward the Japanese Experiment Module for installation and testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008.The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller
KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to a hoisting device to prepare for installation to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers prepare the Remote Manipulator System, or robotic arm, for installation on the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- Inside the Space Station Processing Facility at Kennedy Space Center, workers attach the Remote Manipulator System, or robotic arm, to the Japanese Experiment Module for testing. The RMS is one of the payloads scheduled to be delivered to the station on a future mission tentatively scheduled for 2008. The RMS is similar to the robotic arm already installed on the station's mobile base system. Photo credit: NASA/Amanda Diller

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, members of the STS-124 crew get a close look at equipment on the Japanese Experiment Module, called Kibo, including the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Kibo. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, STS-124 Mission Specialist Michael Fossum (left) gets a close look at equipment on the Japanese Experiment Module, called Kibo, including the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Kibo. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, members of the STS-124 crew get a close look at equipment on the Japanese Experiment Module, called Kibo, including the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Kibo. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett
KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, members of the STS-124 crew get a close look at equipment on the Japanese Experiment Module, called Kibo, including the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Kibo. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett
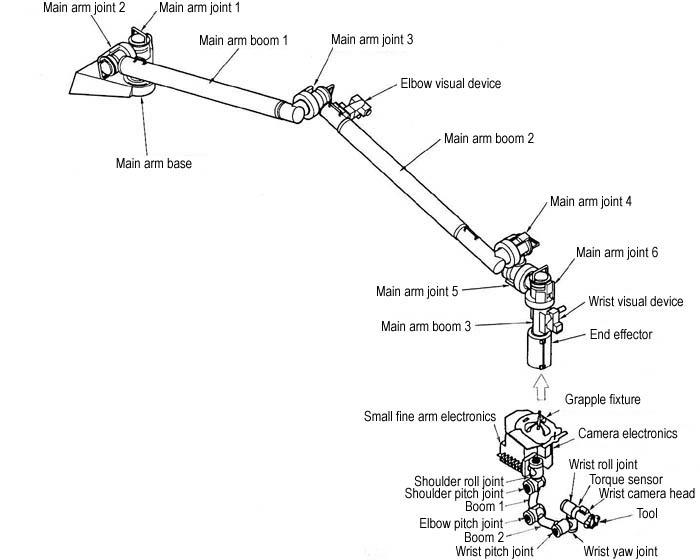
JSC2003-E-42547 (For Release: 18 June 2003) --- This graphic shows the Kibo Japanese Experiment Module (JEM) Remote Manipulator System (RMS). The RMS is used to exchange experiment payloads or hardware located on the JEM Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the Pressurized Module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units (ORUs). The Main Arm can handle up to seven tons (14,000 pounds) of hardware and the Small Fine Arm, when attached to the Main Arm, handles more delicate operations. Photo Credit: NASDA

ISS022-E-020261 (6 Jan. 2010) --- NASA astronaut Jeffrey Williams (right), Expedition 22 commander; Japan Aerospace Exploration Agency astronaut Soichi Noguchi (center) and NASA astronaut T.J. Creamer, both flight engineers, pose for a photo with the Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Fine Arm (SFA) in the Kibo laboratory of the International Space Station.

S127-E-006857 (18 July 2009) --- The Japanese Experiment Module - Exposed Facility (JEF) is pictured in the grasp of the Space Shuttle Endeavour's remote manipulator system (RMS) arm (out of frame) during flight day four robotics activity. Astronauts also began a series of five spacewalks on this day to continue work on the International Space Station.

jsc2021e004419 (10/27/2020) --- A pre-flight view of the RSP-01 Robot Arm Deployment. The RSP-01 satellite is a 1-Unit (1U) CubeSat that deploys during the JEM Small Satellite Orbital Deployer-16 (J-SSOD-16) micro-satellite deployment mission and is handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS). RSP-01 is developed by Rymansat Spaces and launches to the International Space Station aboard the NG-15 Cygnus Cargo Vehicle. Image Credit: Rymansat Spaces.

STS072-726-085 (11-20 Jan. 1996) --- The crew members captured this 70mm view of the Space Shuttle Endeavour’s cargo bay, with the reflection of sunglint over Earth’s horizon. The Canadian-built Remote Manipulator System (RMS) arm, with two television cameras affixed, is at frame right. The crew earlier had retrieved the Japanese Space Flyer (SFU) and berthed in the aft cargo bay, along with the Office of Aeronautics and Space Technology (OAST) Flyer satellite.
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
The Manipulator Flight Demonstration (MFD) payload is prepared for hoisting and installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
The Manipulator Flight Demonstration (MFD) payload is lowered into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectro-meters and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

The Manipulator Flight Demonstration (MFD) payload is hoisted for installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

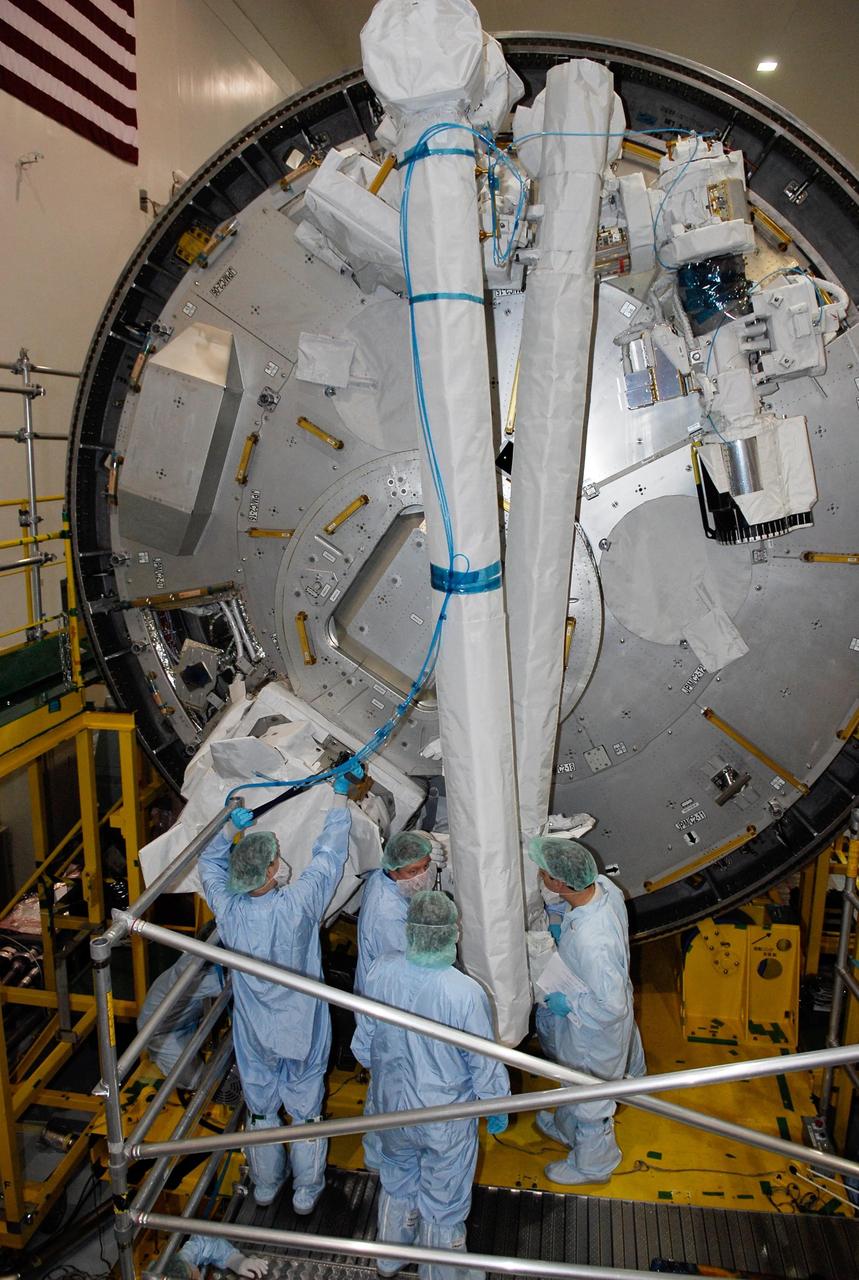
JSC2003-E-42545 (For Release: 18 June 2003) --- The Japanese Experiment Module (JEM) Pressurized Module (PM) is shown in a processing facility with the Remote Manipulator System (RMS) Main Arm attached for integrated testing. The JEM, called Kibo, which means "hope" in Japanese is Japan's primary contribution to the International Space Station. The Main Arm can handle up to seven tons (14,000 pounds) of hardware and a Small Fine Arm can be attached to handle more delicate operations. The PM arrived at Kennedy Space Center (KSC) in early June 2003 to begin integrated testing with the Station's Node 2 and eventually pre-launch processing. The RMS will be delivered to KSC processing at a later date. Photo Credit: NASA

S124-E-010211 (11 June 2008) --- The newly installed Kibo laboratory (center top) attached to the port side of the Harmony node (upper right) of the International Space Station is photographed from Space Shuttle Discovery as the two spacecraft begin their relative separation. The Kibo logistics module and the Japanese remote manipulator system are visible at center. The Canadarm2 robotic arm is at bottom center. Earlier the STS-124 and Expedition 17 crews concluded almost nine days of cooperative work onboard the shuttle and station. Undocking of the two spacecraft occurred at 6:42 a.m. (CDT) on June 11, 2008.

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, members of the STS-124 crew get a close look at the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Japanese Experiment Module, called Kibo. They will be used to exchange experiment payloads or hardware located on the Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the pressurized module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, STS-124 Mission Specialist Michael Fossum gets a close look at the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Japanese Experiment Module, called Kibo. They will be used to exchange experiment payloads or hardware located on the Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the pressurized module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

On Jan. 22, 2015, robotic flight controllers successfully installed NASA’s Cloud Aerosol Transport System (CATS) onboard the International Space Station. CATS will collect data about clouds, volcanic ash plumes and tiny airborne particles that can help improve our understanding of aerosol and cloud interactions, and improve the accuracy of climate change models. CATS had been mounted inside the SpaceX Dragon cargo craft’s unpressurized trunk since it docked at the station on Jan. 12. Ground controllers at NASA’s Johnson Space Center in Houston, Texas, used one of the space station’s robotic arms, called the Special Purpose Dexterous Manipulator, to extract the instrument from the capsule. The NASA-controlled arm passed the instrument to a second robotic arm— like passing a baton in a relay race. This second arm, called the Japanese Experiment Module Remote Manipulator System, is controlled by the Japanese Aerospace Exploration Agency. The Japanese-controlled arm installed the instrument to the Space Station’s Japanese Experiment Module, making CATS the first NASA-developed payload to fly on the Japanese module. CATS is a lidar remote-sensing instrument designed to last from six months to three years. It is specifically intended to demonstrate a low-cost, streamlined approach to developing science payloads on the space station. CATS launched aboard the SpaceX Dragon spacecraft on Jan. 10 at Cape Canaveral Air Force Station in Florida. To learn more about the impact of CATS data, visit: <a href="http://www.nasa.gov/cats/" rel="nofollow">www.nasa.gov/cats/</a> <b><a href="http://www.nasa.gov/audience/formedia/features/MP_Photo_Guidelines.html" rel="nofollow">NASA image use policy.</a></b> <b><a href="http://www.nasa.gov/centers/goddard/home/index.html" rel="nofollow">NASA Goddard Space Flight Center</a></b> enables NASA’s mission through four scientific endeavors: Earth Science, Heliophysics, Solar System Exploration, and Astrophysics. Goddard plays a leading role in NASA’s accomplishments by contributing compelling scientific knowledge to advance the Agency’s mission. <b>Follow us on <a href="http://twitter.com/NASAGoddardPix" rel="nofollow">Twitter</a></b> <b>Like us on <a href="http://www.facebook.com/pages/Greenbelt-MD/NASA-Goddard/395013845897?ref=tsd" rel="nofollow">Facebook</a></b> <b>Find us on <a href="http://instagram.com/nasagoddard?vm=grid" rel="nofollow">Instagram</a></b>

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center, access arms from the fixed service structure at Launch Pad 39A are in place against space shuttle Discovery, secured atop the mobile launch platform below, as final prelaunch processing for the STS-124 mission begins at the pad. The 3.4-mile journey from the Vehicle Assembly Building began at 11:47 p.m. on May 2. The shuttle arrived at the launch pad at 4:25 a.m. EDT May 3 and was secured, or hard down, by 6:06 a.m. On the 13-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is targeted for May 31. Photo credit: NASA/Troy Cryder

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center, access arms from the fixed service structure at Launch Pad 39A are extended toward space shuttle Discovery, secured atop the mobile launch platform below, as final prelaunch processing for the STS-124 mission gets under way at the pad. The 3.4-mile journey from the Vehicle Assembly Building began at 11:47 p.m. on May 2. The shuttle arrived at the launch pad at 4:25 a.m. EDT May 3 and was secured, or hard down, by 6:06 a.m. On the 13-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is targeted for May 31. Photo credit: NASA/Troy Cryder
KENNEDY SPACE CENTER, FLA. -- Members of the STS-85 flight crew examine the Manipulator Flight Demonstraton (MFD) payload in the payload bay of the Space Shuttle Orbiter Discovery during Crew Equipment Interface Test (CEIT) activities for that mission. They are (left) Mission Specialists Stephen K. Robinson and Robert L. Curbeam Jr. (right). They are accompanied by a United Space Alliance (USA) payload technician. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPES) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the Interntional Space Station, will be operated from the orbiter's aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhhiker (IEH-2) experiments.
KENNEDY SPACE CENTER, FLA. -- Members of the STS-85 flight crew perform a sharp-edge inspection in the payload bay of the Space Shuttle Orbiter Discovery in the space plane's payload bay during Crew Equipment Interface Test (CEIT) activities for that mission. They are (from left, foreground) Mission Specialists Stephen K. Robinson and Robert L. Curbeam Jr. (right). They are accompanied by a United Space Alliance (USA) payload technician. The Manipulator Flight Demonstration (MFD) payload is one of several that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA). The arm, which will be a part of the JEM element of the Interntional Space Station, will be operated from the orbiter's aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhhiker (IEH-2) experiments.

CAPE CANAVERAL, Fla. -- Against the dark sky, lights bathe space shuttle Discovery, revealed after rollback of the rotating service structure in preparation for launch on the STS-124 mission. First motion was at 8:33 p.m. and rollback was complete at 9:07 p.m. The rotating structure provides protected access to the shuttle for changeout and servicing of payloads at the pad. It is supported by a rotating bridge that pivots on a vertical axis on the west side of the pad's flame trench. After the RSS is rolled back, the orbiter is ready for fuel cell activation and external tank cryogenic propellant loading operations. The pad is cleared to the perimeter gate for operations to fill the external tank with about 500,000 gallons of cryogenic propellants used by the shuttle’s main engines. This is done at the pad approximately eight hours before the scheduled launch. Above the orange external tank is the oxygen vent hood, called the "beanie cap," at the end of the gaseous oxygen vent arm extending from the fixed service structure. Vapors are created as the liquid oxygen in the external tank boil off. The hood vents the gaseous oxygen vapors away from the space shuttle vehicle. Below is the orbiter access arm with the White Room at the end, flush against the shuttle. The White Room provides access into the shuttle. The STS-124 mission is the second of three flights launching components to complete the Japan Aerospace Exploration Agency's Kibo laboratory. The shuttle crew will install Kibo's large Japanese Pressurized Module and its remote manipulator system, or RMS. The 14-day flight includes three spacewalks. Launch is scheduled for 5:02 p.m. May 31. Photo credit: NASA/Troy Cryder

CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, the rotating service structure, or RSS, has rolled back on its axis to uncover space shuttle Discovery, lighted against the night sky, in preparation for launch on the STS-124 mission. Support for the outer end of the bridge is provided by two eight-wheel, motor-driven trucks (one is seen at bottom left) that move along circular twin rails installed flush with the pad surface. First motion was at 8:33 p.m. and rollback was complete at 9:07 p.m. The structure provides protected access to the shuttle for changeout and servicing of payloads at the pad. It is supported by a rotating bridge that pivots on a vertical axis on the west side of the pad's flame trench. After the RSS is rolled back, the orbiter is ready for fuel cell activation and external tank cryogenic propellant loading operations. The pad is cleared to the perimeter gate for operations to fill the external tank with about 500,000 gallons of cryogenic propellants used by the shuttle’s main engines. This is done at the pad approximately eight hours before the scheduled launch. Above the orange external tank is the oxygen vent hood, called the "beanie cap," at the end of the gaseous oxygen vent arm extending from the fixed service structure. Vapors are created as the liquid oxygen in the external tank boil off. The hood vents the gaseous oxygen vapors away from the space shuttle vehicle. Below is the orbiter access arm with the White Room at the end, flush against the shuttle. The White Room provides access into the shuttle. The STS-124 mission is the second of three flights launching components to complete the Japan Aerospace Exploration Agency's Kibo laboratory. The shuttle crew will install Kibo's large Japanese Pressurized Module and its remote manipulator system, or RMS. The 14-day flight includes three spacewalks. Launch is scheduled for 5:02 p.m. May 31. Photo credit: NASA/Troy Cryder

CAPE CANAVERAL, Fla. -- Bathed in lights surrounding Launch Pad 39A and its structures at NASA's Kennedy Space Center, space shuttle Discovery looks polished and ready for launch on the STS-124 mission after rollback of the rotating service structure. First motion was at 8:33 p.m. and rollback was complete at 9:07 p.m. The rotating structure provides protected access to the shuttle for changeout and servicing of payloads at the pad. It is supported by a rotating bridge that pivots on a vertical axis on the west side of the pad's flame trench. After the RSS is rolled back, the orbiter is ready for fuel cell activation and external tank cryogenic propellant loading operations. The pad is cleared to the perimeter gate for operations to fill the external tank with about 500,000 gallons of cryogenic propellants used by the shuttle’s main engines. This is done at the pad approximately eight hours before the scheduled launch. Along with the orange external tank and one of the two solid rocket boosters, the orbiter access arm is seen extended to the side of the shuttle. At the end is the White Room, which provides access into the shuttle. The STS-124 mission is the second of three flights launching components to complete the Japan Aerospace Exploration Agency's Kibo laboratory. The shuttle crew will install Kibo's large Japanese Pressurized Module and its remote manipulator system, or RMS. The 14-day flight includes three spacewalks. Launch is scheduled for 5:02 p.m. May 31. Photo credit: NASA/Troy Cryder