
STS002-12-833 (13 Nov. 1981) --- Clouds over Earth and black sky form the background for this unique photograph from the space shuttle Columbia in Earth orbit. The photograph was shot through the aft flight deck windows viewing the cargo bay. Part of the scientific payload of the Office of Space and Terrestrial Applications (OSTA-1) is visible in the open cargo bay. The astronauts inside Columbia's cabin were remotely operating the Canadian-built remote manipulator system (RMS). Note television cameras on its elbow and wrist pieces. Photo credit: NASA

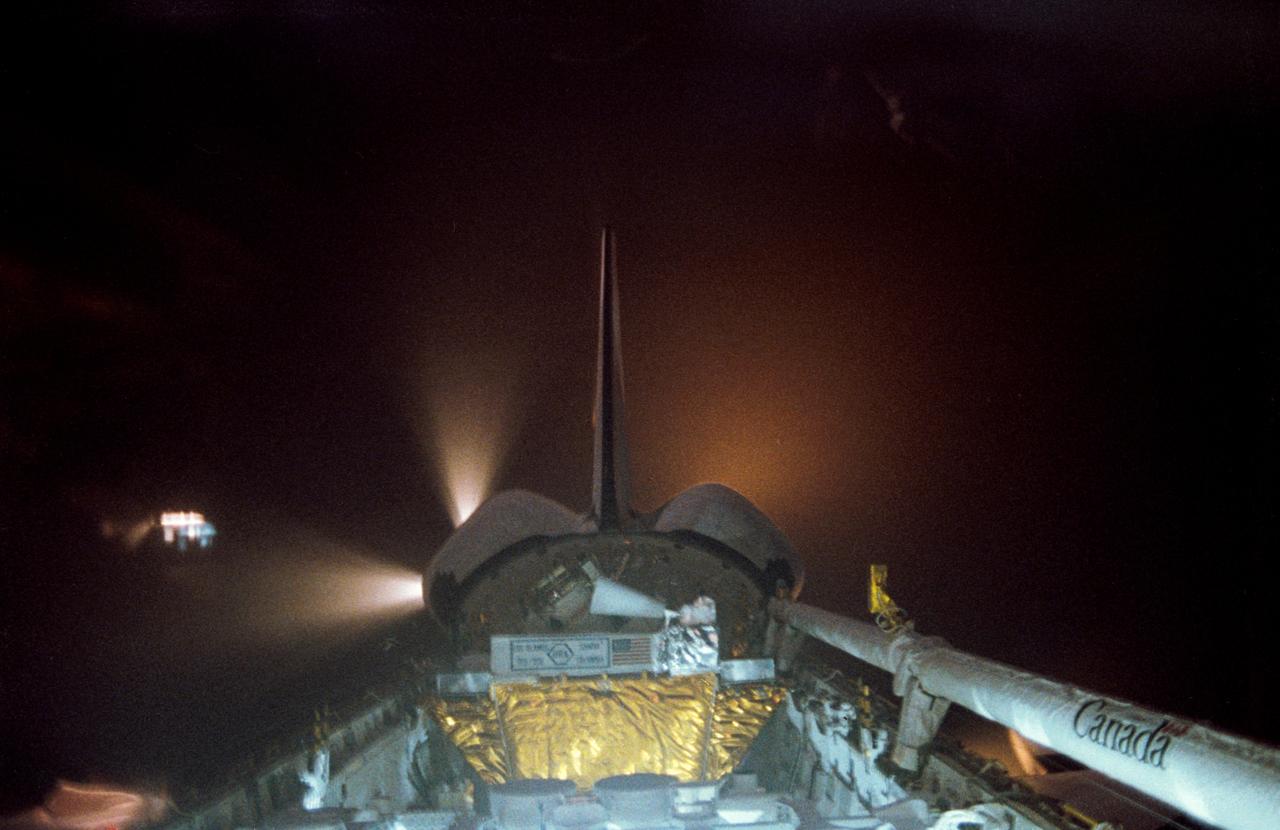
Spartan I satellte sits in the Discovery's payload bay prior to being deployed. Above it can be seen the remote manipulator system (RMS) arm and end effector. The Earth's horizon can also be seen above the orbiter.
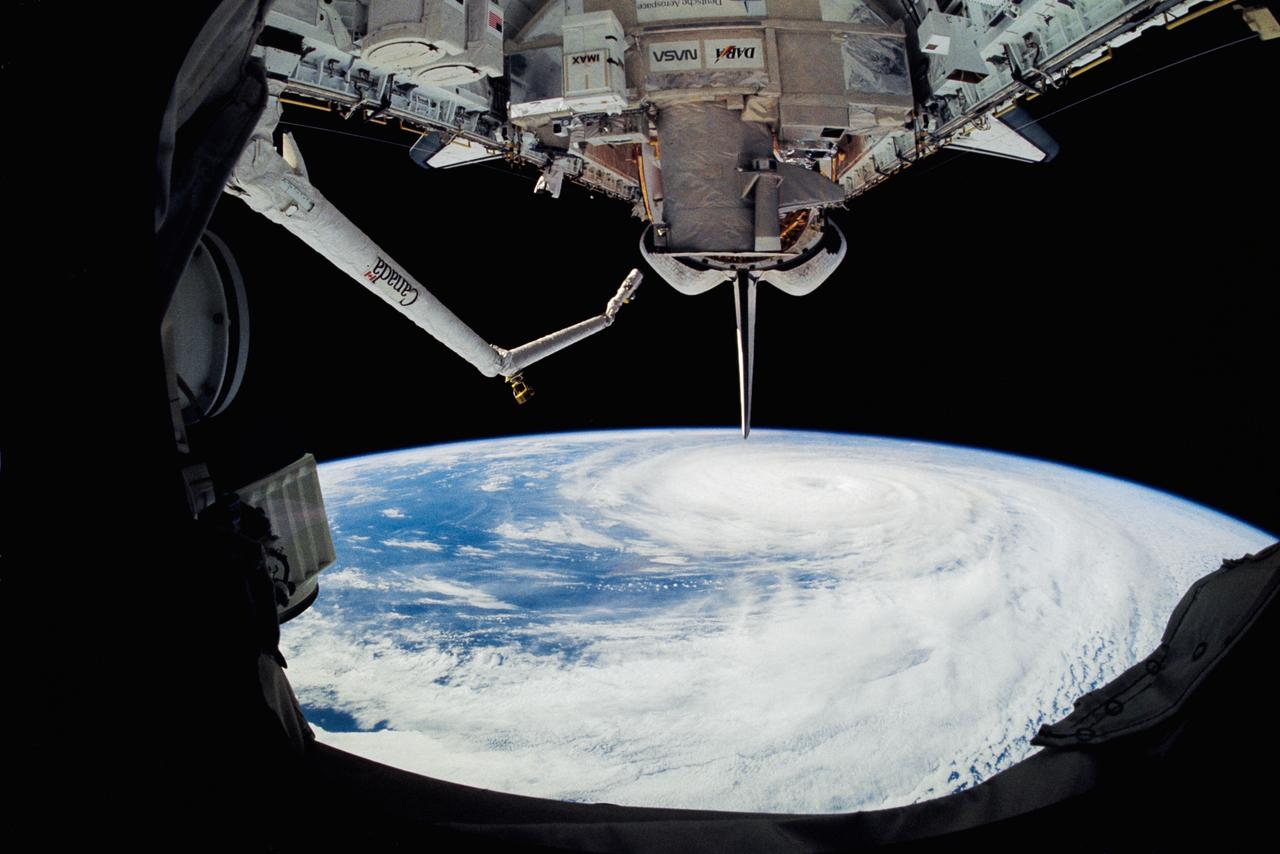
One of the STS-51 astronauts used a "fish-eye" lens on a 35mm cmaera to photograph this view of Hurricane Kenneth in the Pacific Ocean. The Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer/Shuttle Pallet Satellite (ORFEUS/SPAS) is still in the cargo bay. The Remote Manipulator System (RMS) is extended towards the open payload bay.

STS064-90-031 (9-20 Sept. 1994) --- Backdropped against the darkness of space beneath Earth's horizon 130 nautical miles away, the cargo bay of the space shuttle Discovery and its related payloads were captured on 70mm film by one of the six cabin-bound astronauts. In the foreground is the Lidar In-space Technology Experiment (LITE). The robot arm portion of the Remote Manipulator System (RMS), busy throughout much of the almost 11-day mission, is in a stowed position on Discovery's port side. Photo credit: NASA or National Aeronautics and Space Administration

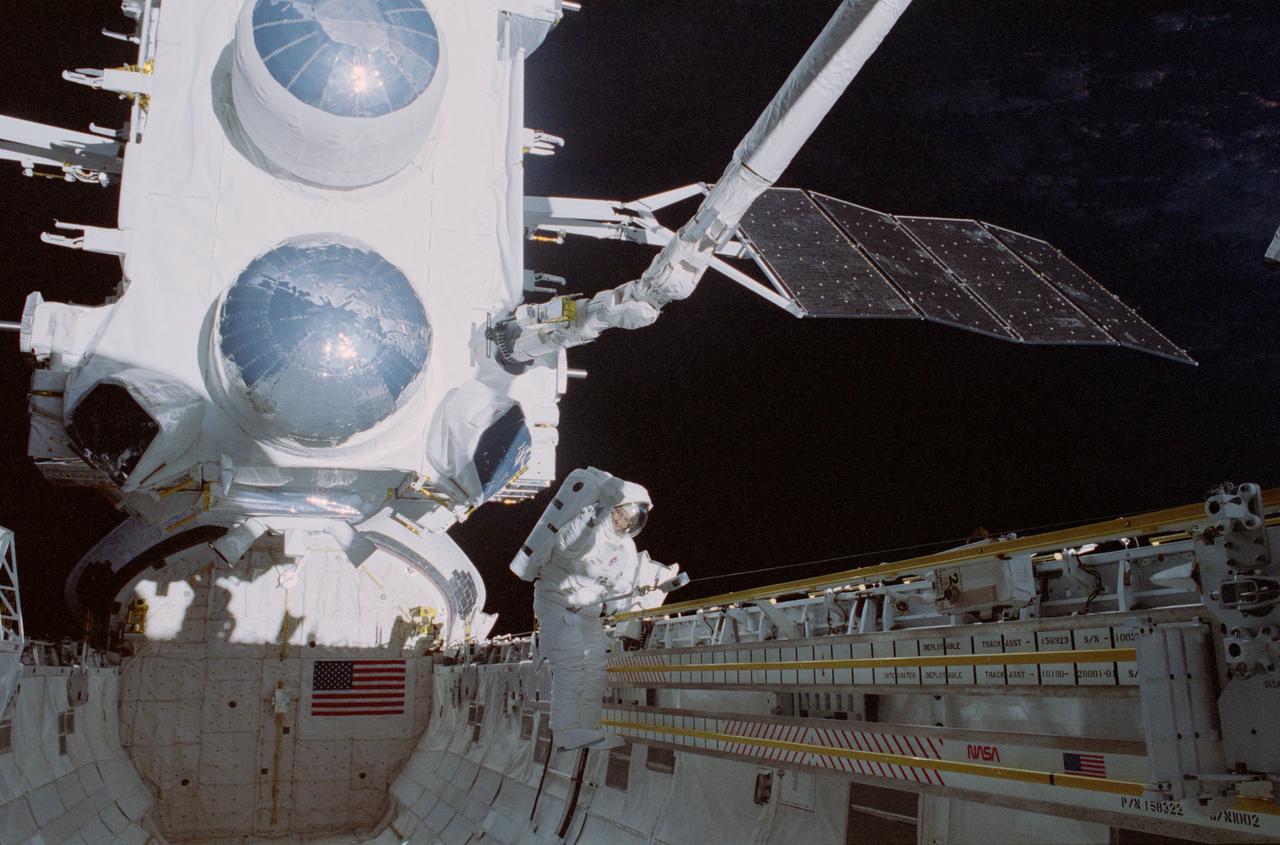
Astronauts Jerry L. Ross (left) and Sherwood C. (Woody) Spring are photographed as they assemble pieces of the Experimental Assembly of Structures in Extravehicular Activities (EASE) device in the open payload bay. The Canadian-built remote manipulator system (RMS) arm (partially obscured in the right portion of the frame) is in position to allow television cameras to record the activity.
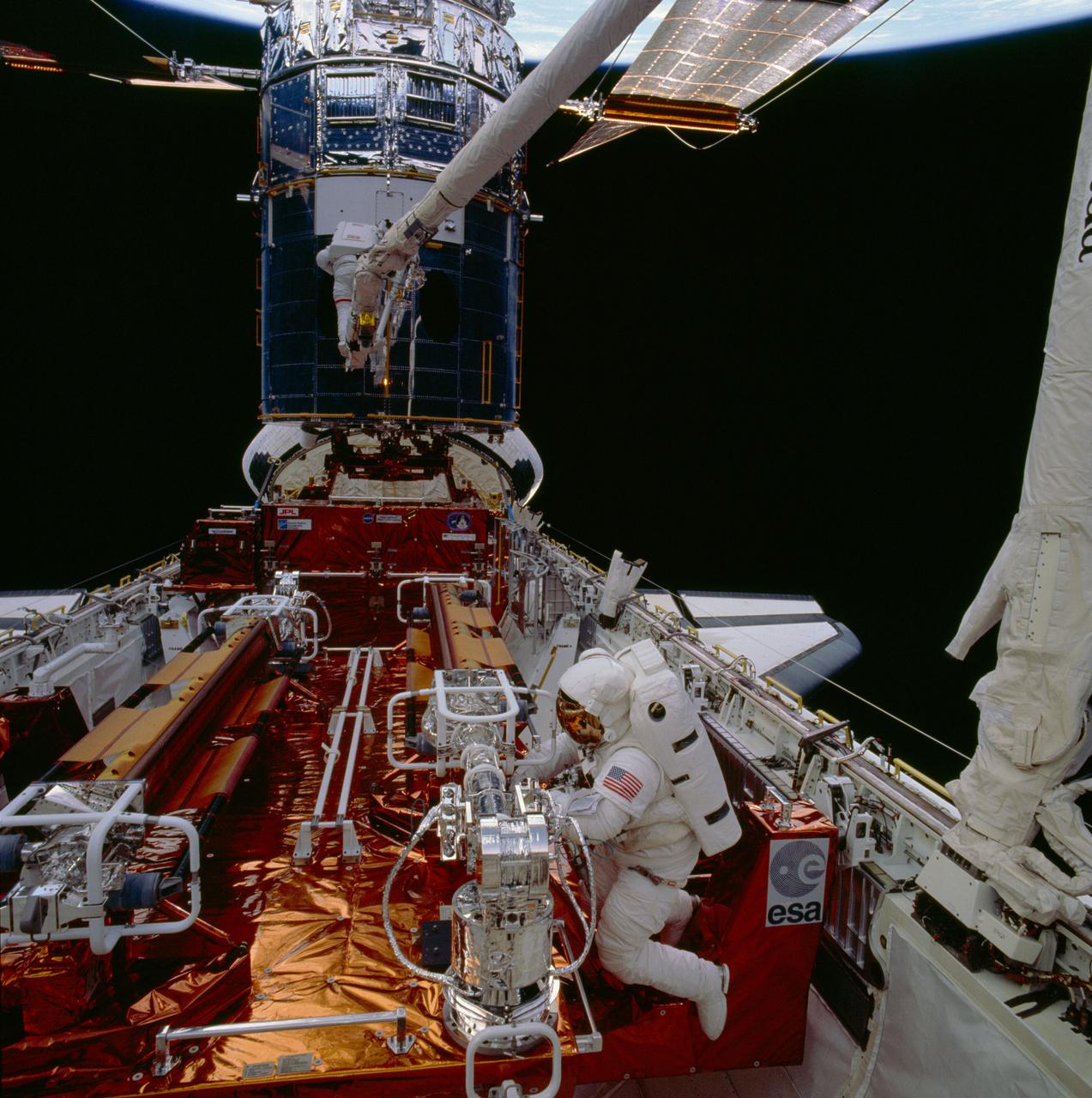
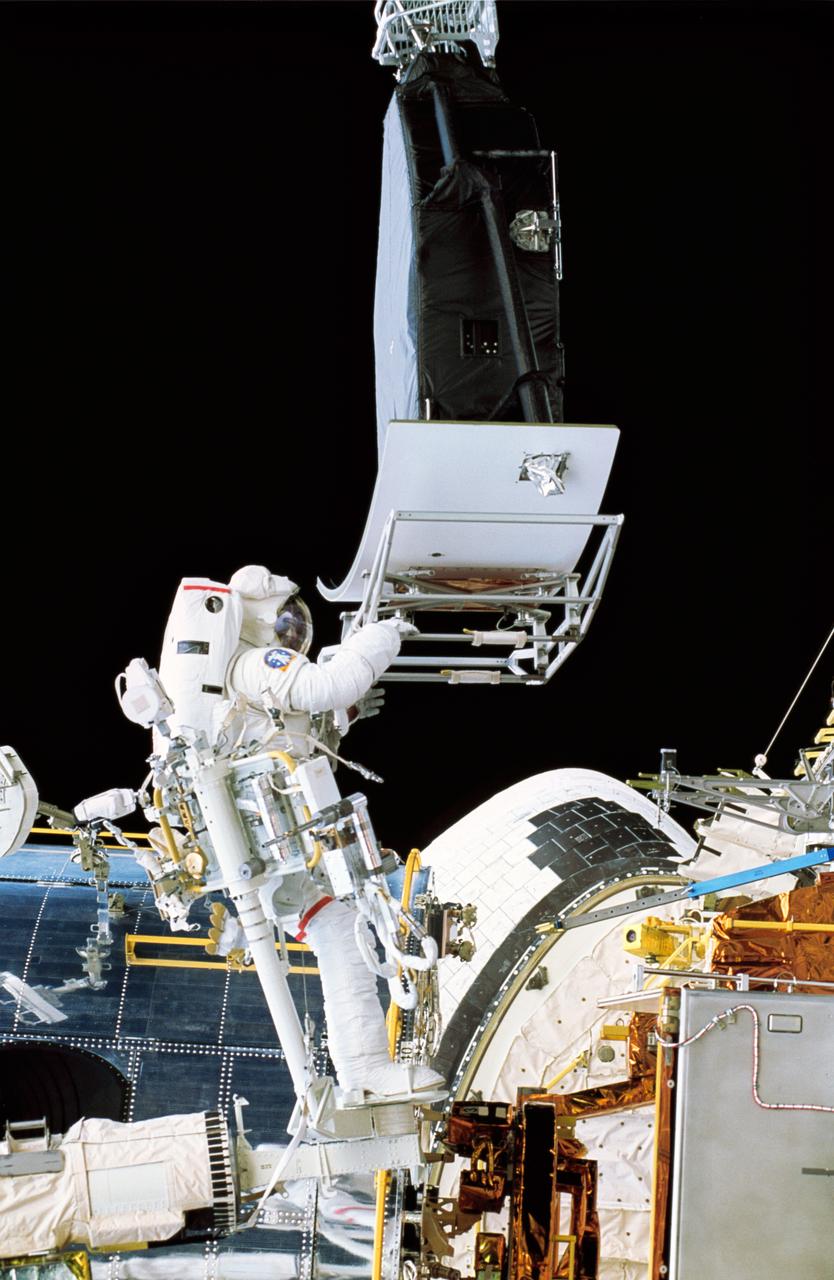
STS061-86-048 (5 Dec 1993) --- Astronauts F. Story Musgrave (foreground) and Jeffrey A. Hoffman are pictured near the end of the first of five extravehicular activity?s (EVA). Musgrave works at the Solar Array Carrier (SAC) in the Space Shuttle Endeavour's cargo bay. Hoffman, anchored to a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, waits to be maneuvered to the forward payload bay. The original solar array panels are partially visible at top, while their replacements remain stowed in foreground. The crew's second pair of space walkers -- astronauts Kathryn C. Thornton and Thomas D. Akers -- later changed the solar arrays on the mission's second EVA.
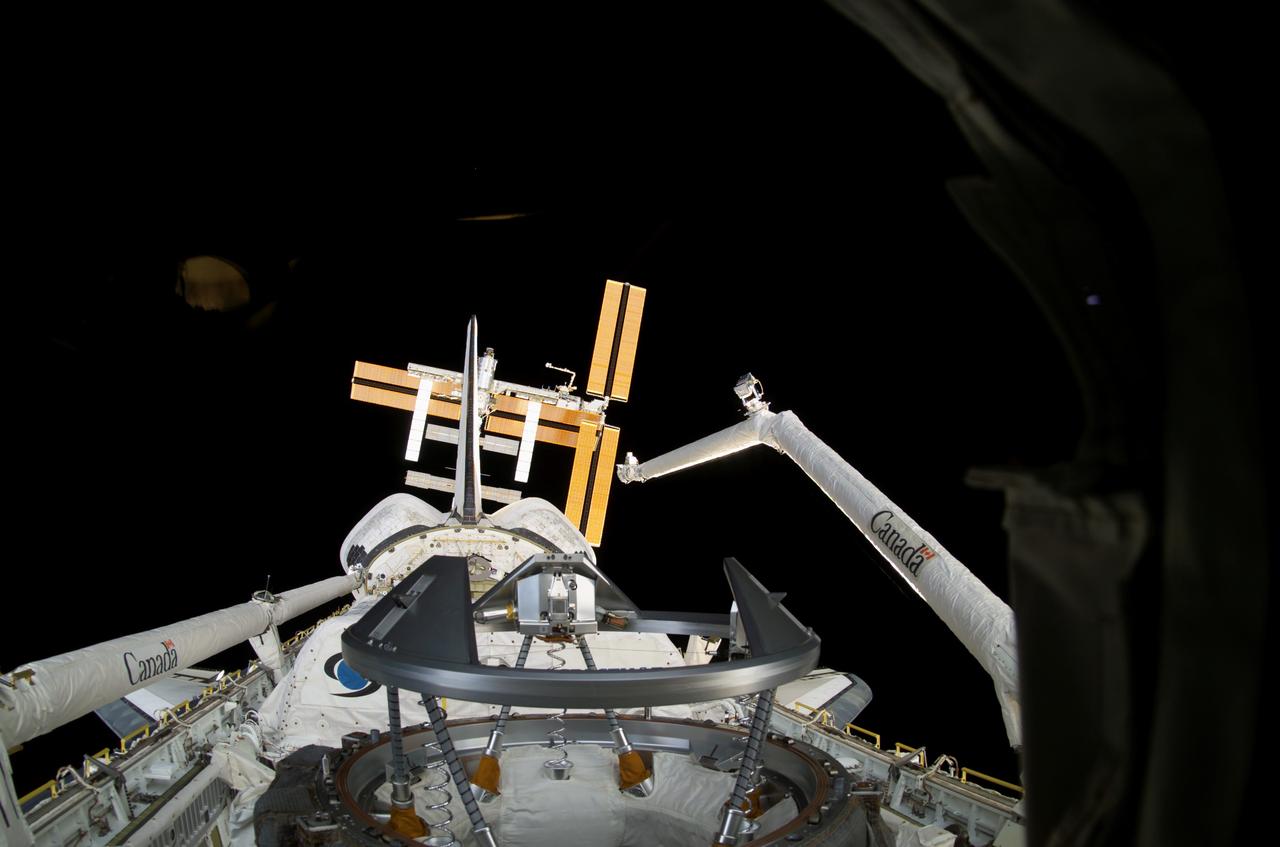
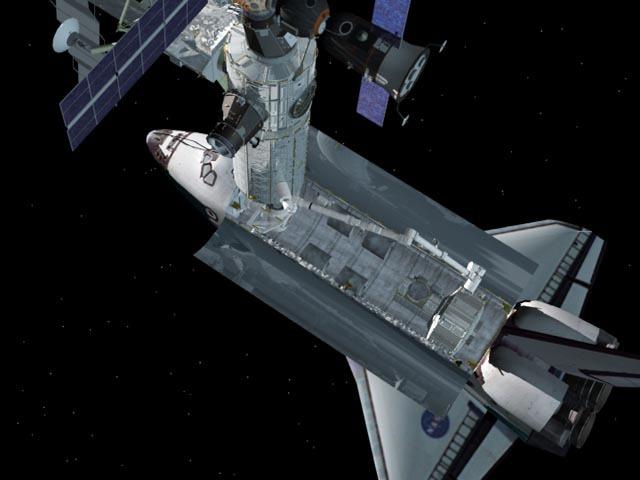
S116-E-05504 (11 Dec. 2006) --- As seen through windows on the aft flight deck of Space Shuttle Discovery, the shuttle's payload bay and the approaching International Space Station (background) are featured in this image photographed by a STS-116 crewmember during flight day three activities. Pictured in the payload bay are the shuttle's docking mechanism (foreground), Spacehab module (partially obscured), the Canadian-built Remote Manipulator System (RMS) robotic arm (right), and the Remote Manipulator System/Orbiter Boom Sensor System (left, in stowed position).
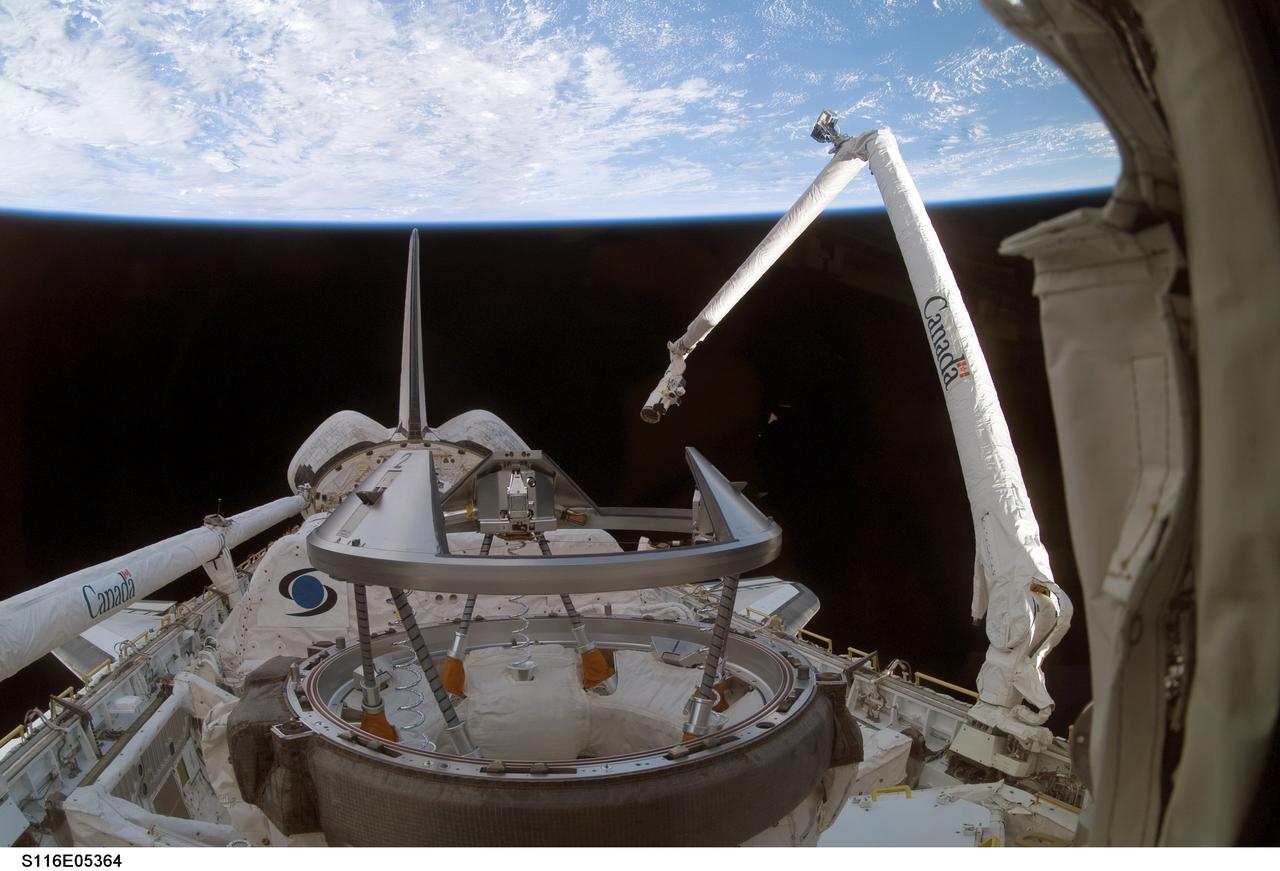
S116-E-05364 (11 Dec. 2006) --- As seen through windows on the aft flight deck of Space Shuttle Discovery, the payload bay is featured in this image photographed by a STS-116 crewmember during flight day three activities. Pictured in the payload bay is the shuttle's docking mechanism (foreground), Spacehab module (partially obscured), the Canadian-built Remote Manipulator System (RMS) robotic arm (right), and the Remote Manipulator System/Orbiter Boom Sensor System (left, in stowed position).
JSC2001-E-19790 (July 2001) --- A computer-generated representation showing the Space Station Remote Manipulator System (SSRMS) lifting the Quest Airlock out of the payload bay of the Space Shuttle Atlantis during the STS-104 mission.

View of the SIR-B antenna being deployed during STS 41-G. The Challenger's payload bay is open and the remote manipulator system (RMS) arm is in the stowed position at the right of the view.
STS003-21-080 (22-30 March 1982) --- Plasma Diagnostics Package (PDP) grappled by remote manipulator system (RMS) end effector is positioned above payload bay (PLB) at sunrise. Photo credit: NASA
Photographic documentation showing activities in the payload bay of the orbiter Atlantis during STS-37. View include: Gamma Ray Observatory (GRO) on end of Remote Manipulator System (RMS), with Mission Specialist Jay Apt below on the port side of the payload bay.

STS007-32-1667 (22 June 1983) --- The Earth-orbiting Space Shuttle Challenger over a heavily cloud-covered portion of the Earth was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa-B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew and the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay of the Space Shuttle Challenger for the return to Earth.

STS037-99-098 (7 April 1991) --- Backdropped against clouds over water, the Gamma Ray Observatory (GRO) is still in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) in this 70mm scene. A special Extravehicular Activity (EVA) was required by astronauts Jerry L. Ross and Jerome (Jay) Apt to manually extend the high-gain antenna on GRO. The five-member crew capped off a busy Flight Day 3 by releasing the heavy payload.
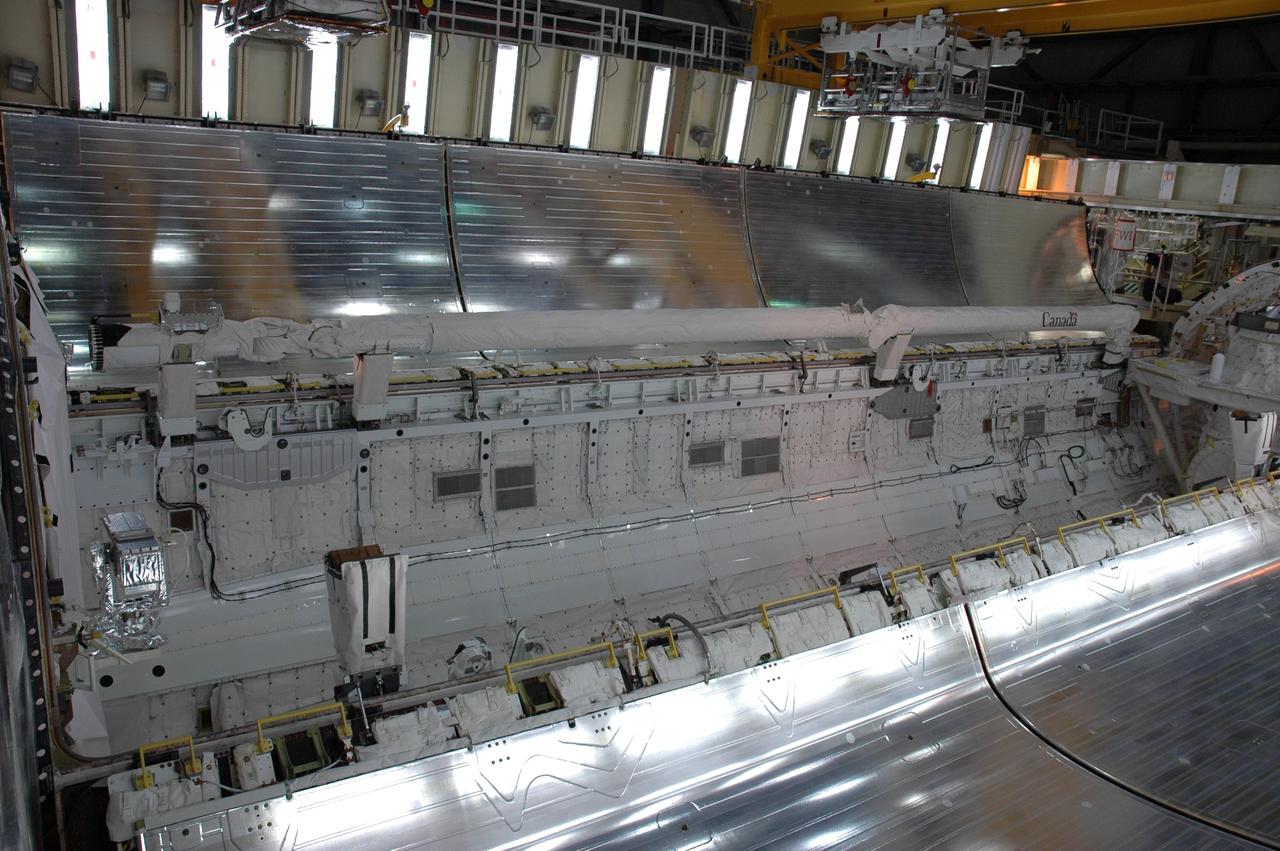
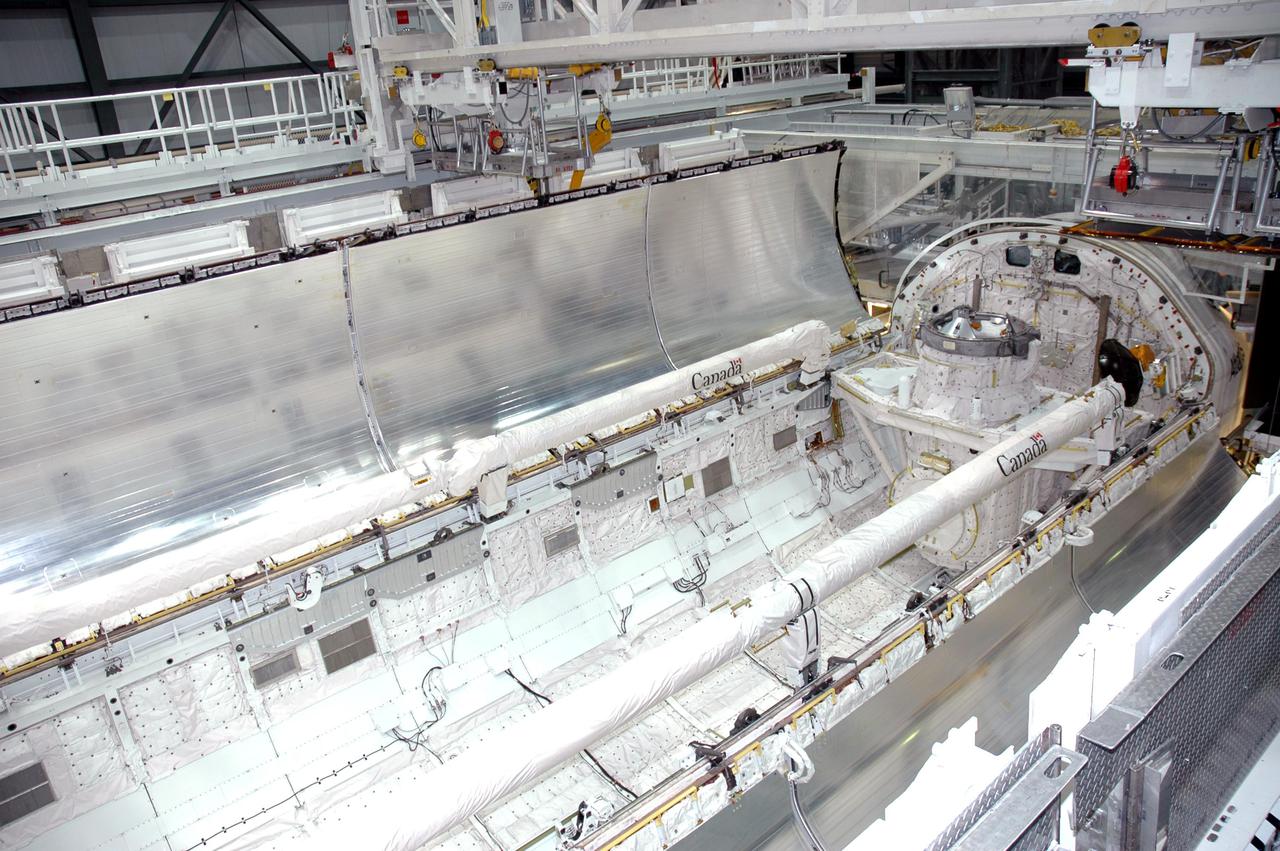
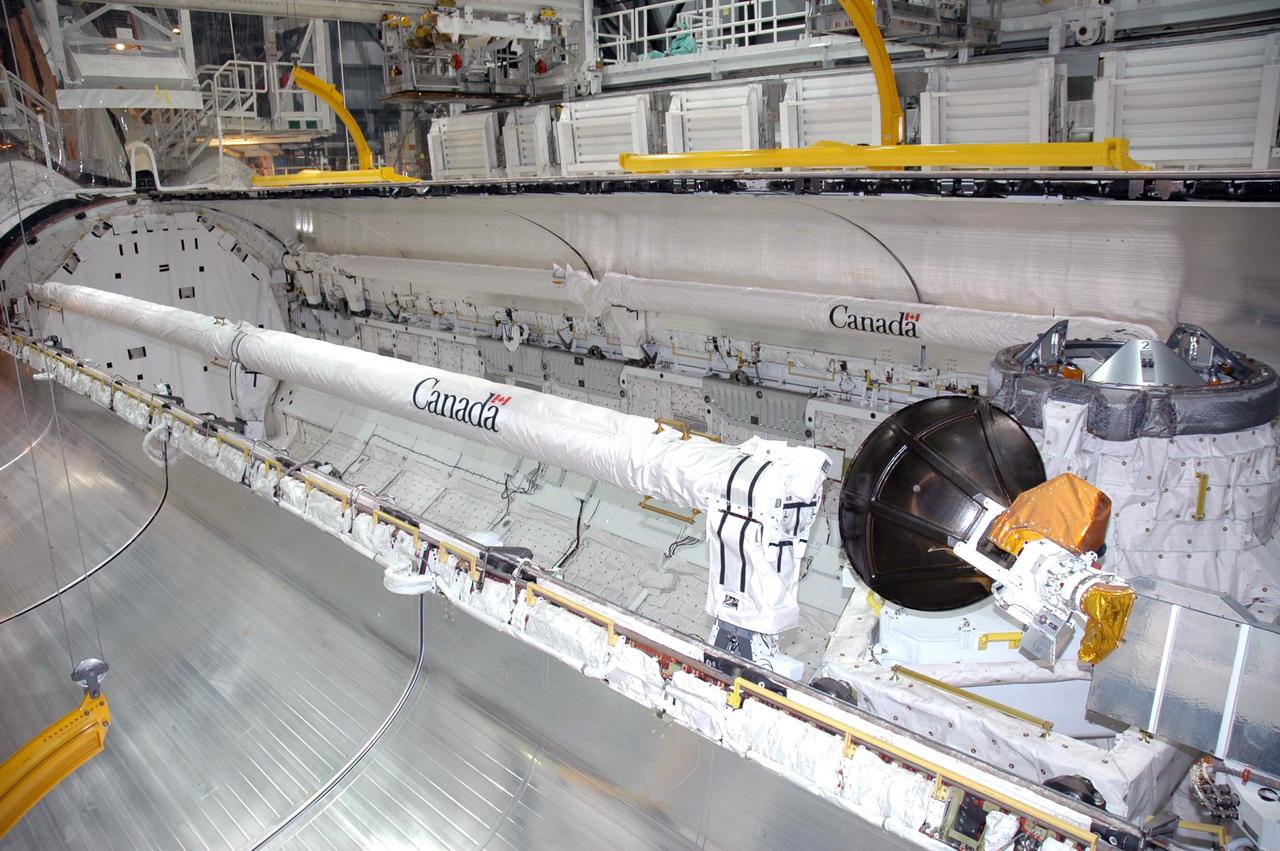
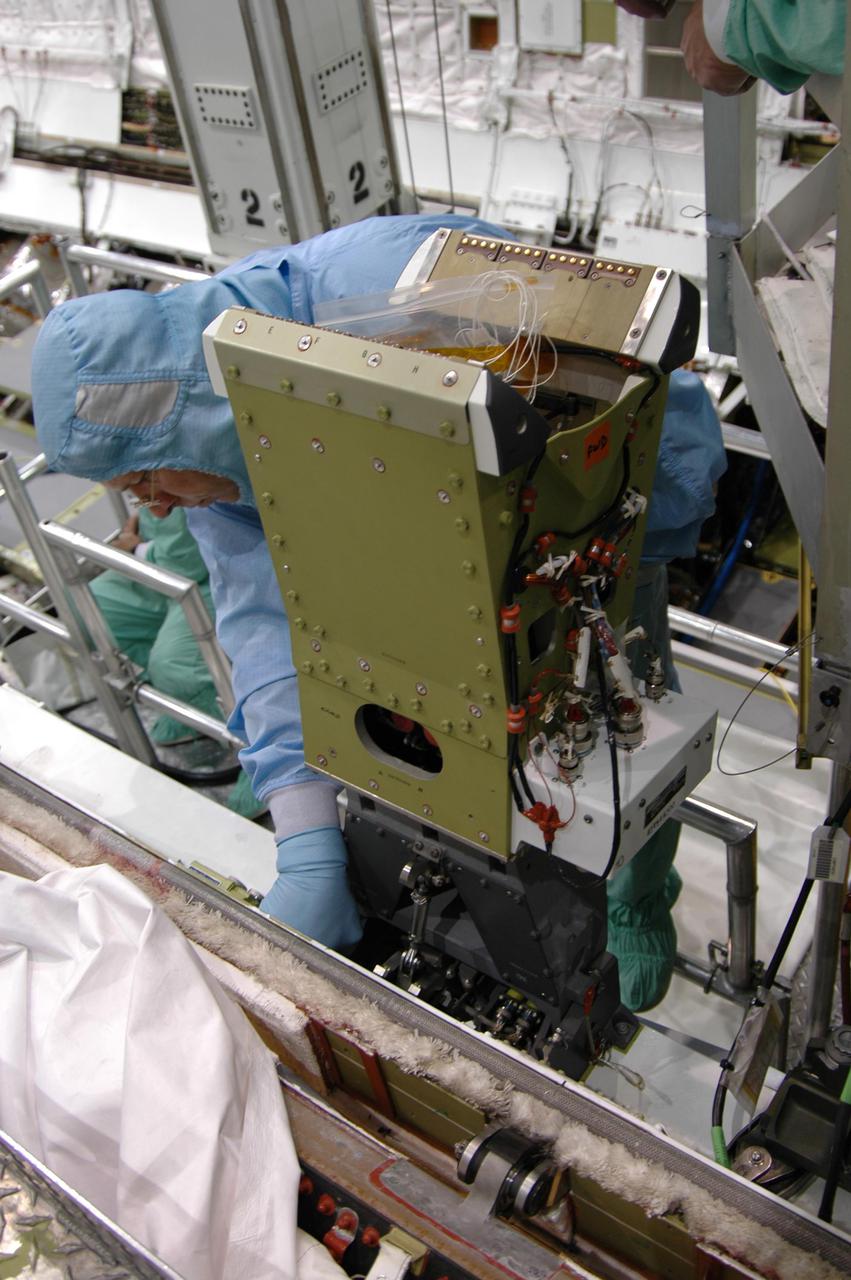
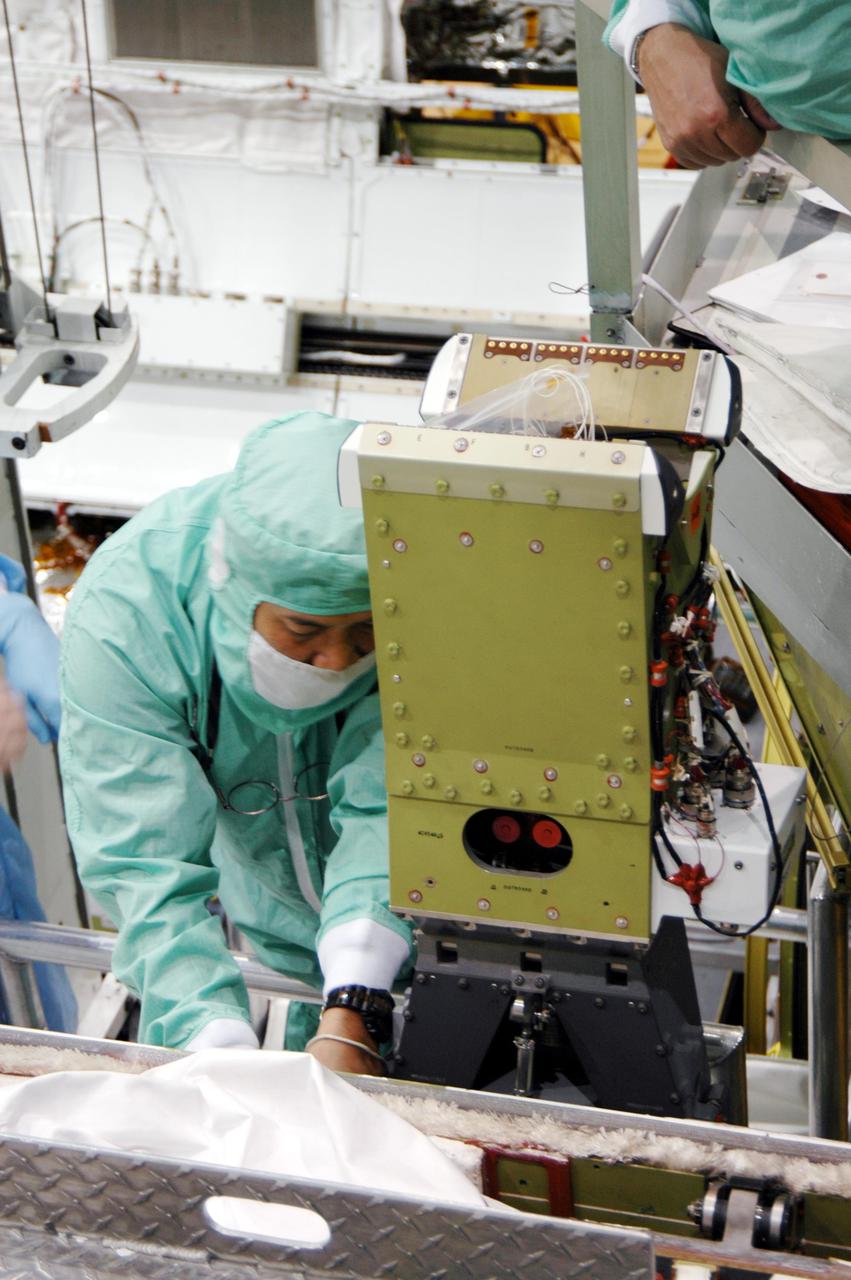
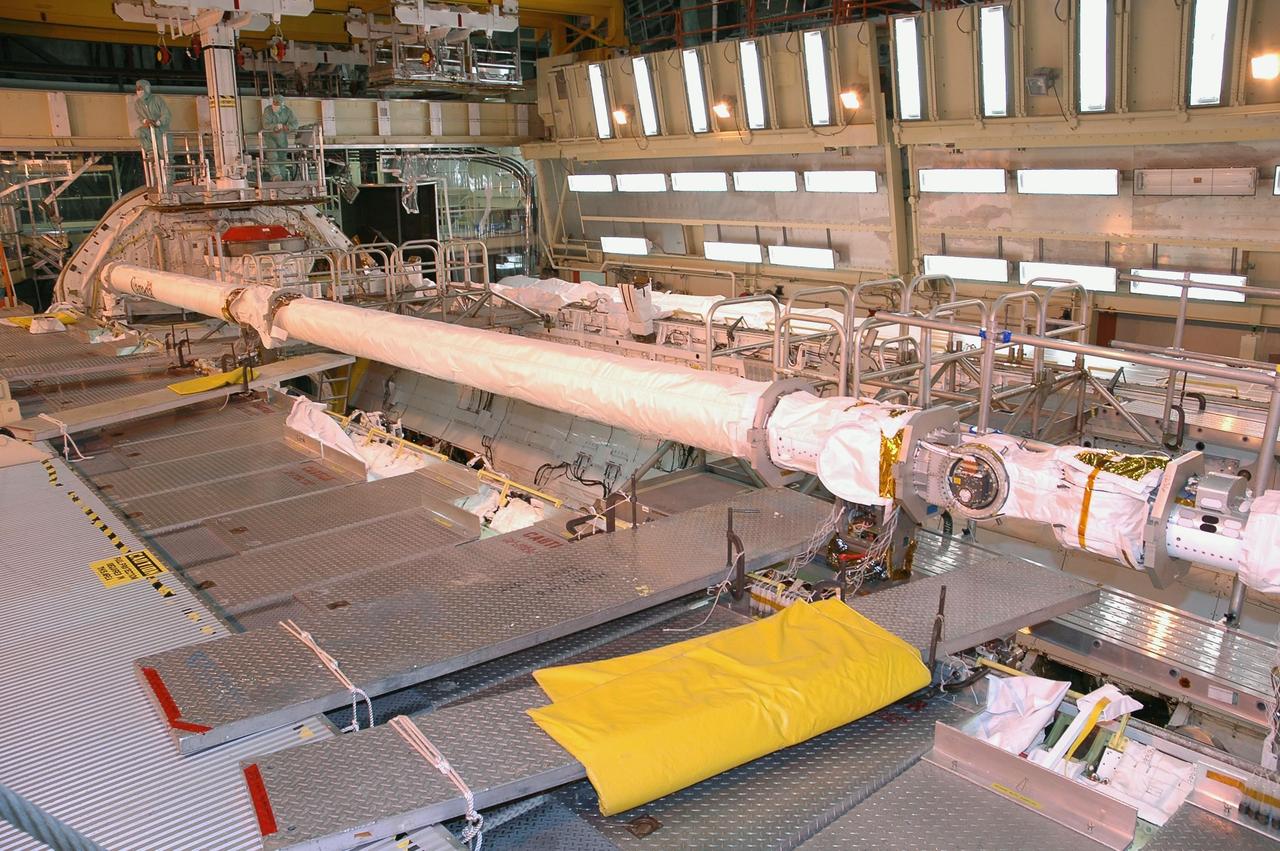
CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, the STS-124 mission payload, the Japanese Experiment Module - Pressurized Module, is being transferred from the Payload Changeout Room into space shuttle Discovery's payload bay. At top is the orbital docking system inside the payload bay. At the bottom is the Japanese Remote Manipulator System. Not visible is the pressurized module. Launch of Discovery is targeted for May 31. Photo credit: NASA/Jim Grossmann

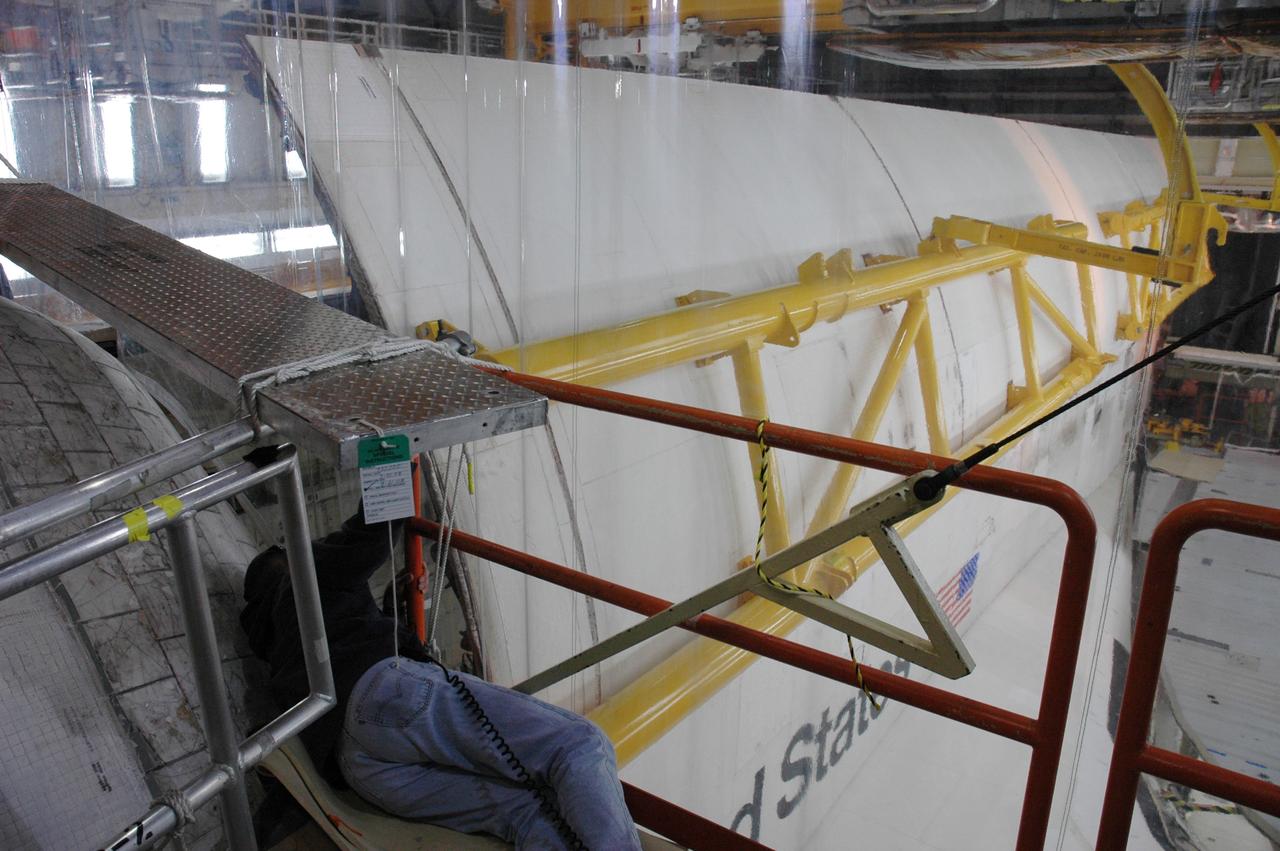
CAPE CANAVERAL, Fla. -- Inside space shuttle Discovery's payload bay can be seen the red rain gutters, which prevent leaks into the bay from rain while the shuttle is on the pad. The STS-124 mission payload, the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System (below the gutters), is being transferred from the Payload Changeout Room into the payload bay. Launch of Discovery is targeted for May 31. Photo credit: NASA/Jim Grossmann

The shadows of astronauts Piers J. Sellers and Michael E. Fossum, STS-121 mission specialists, who are anchored to the Space Shuttle Discovery's Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) foot restraint, are visible against a shuttle's payload bay door during a session of extravehicular activity (EVA).

S125-E-012514 (19 May 2009) --- Space Shuttle Atlantis? payload bay, Canadian-built remote manipulator system (RMS) robotic arm, vertical stabilizer and orbital maneuvering system (OMS) pods are featured in this image photographed by an STS-125 crewmember on flight day nine.

S122-E-006381 (8 Feb. 2008) --- Backdropped by the blackness of space and Earth's horizon, Atlantis' orbiter docking system (foreground) and the Canadarm Remote Manipulator System (RMS) in the payload bay are featured in this image photographed by a STS-122 crewmember during flight day two activities.
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay door at left is beginning to close. On the left side of the payload bay is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

KENNEDY SPACE CENTER, FLA. - In Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, Atlantis’ payload bay doors are partially opened. The 50-foot-long OBSS attaches to the Remote Manipulator System, or Shuttle arm, and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in September. Once Atlantis' bay doors are open again, further work will be done in the bay.
KENNEDY SPACE CENTER, FLA. - In Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, Atlantis’ payload bay doors are fully open. The Remote Manipulator System, or Shuttle arm, is seen on the port side (top) and Orbiter Boom Sensor System (OBSS) is seen on the starboard side (lower) of the payload bay. The 50-foot-long OBSS attaches to the Shuttle arm and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in September. Once Atlantis' bay doors are open again, further work will be done in the bay.

KENNEDY SPACE CENTER, FLA. - In Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, Atlantis’ payload bay doors are open. The Remote Manipulator System, or Shuttle arm, is seen on the port side (top) and Orbiter Boom Sensor System (OBSS) is seen on the starboard side (lower) of the payload bay. The 50-foot-long OBSS attaches to the Shuttle arm and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in September. Once Atlantis' bay doors are open again, further work will be done in the bay.

KENNEDY SPACE CENTER, FLA. - In Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, Atlantis’ payload bay doors are being opened. The payload bay doors were closed for a clearance check on the Orbiter Boom Sensor System (OBSS), built in Canada. The 50-foot-long OBSS attaches to the Remote Manipulator System, or Shuttle arm, and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in September. Once the bay doors are open again, further work will be done in the bay.
CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, the Japanese Experiment Module—Pressurized Module is seen in space shuttle Discovery's payload bay as the payload bay doors begin to close. Above the pressurized module is the orbital docking system. The launch of Discovery on its STS-124 mission is targeted for May 31. On the mission, Discovery will transport the pressurized module and the Japanese Remote Manipulator System to the International Space Station. Photo credit: NASA/Kim Shiflett
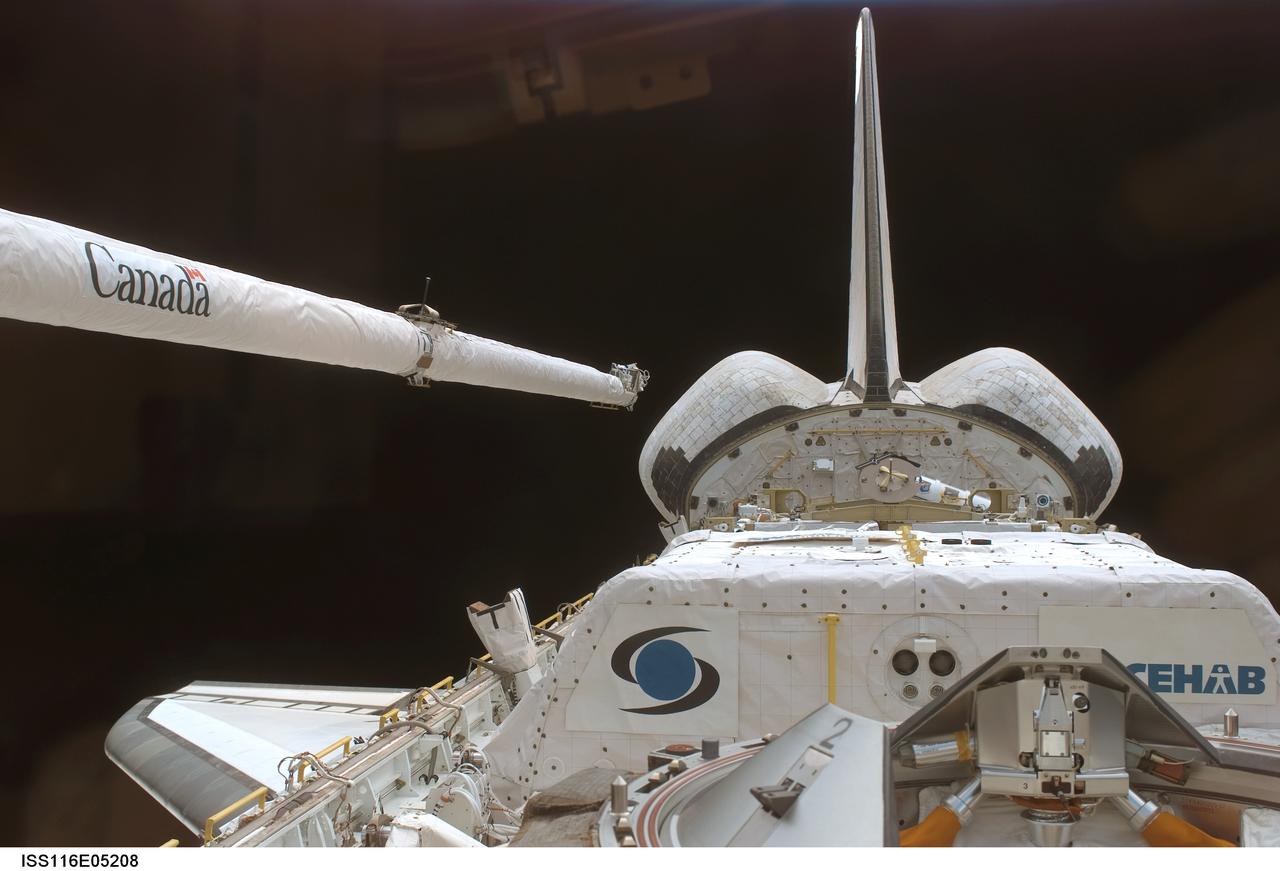
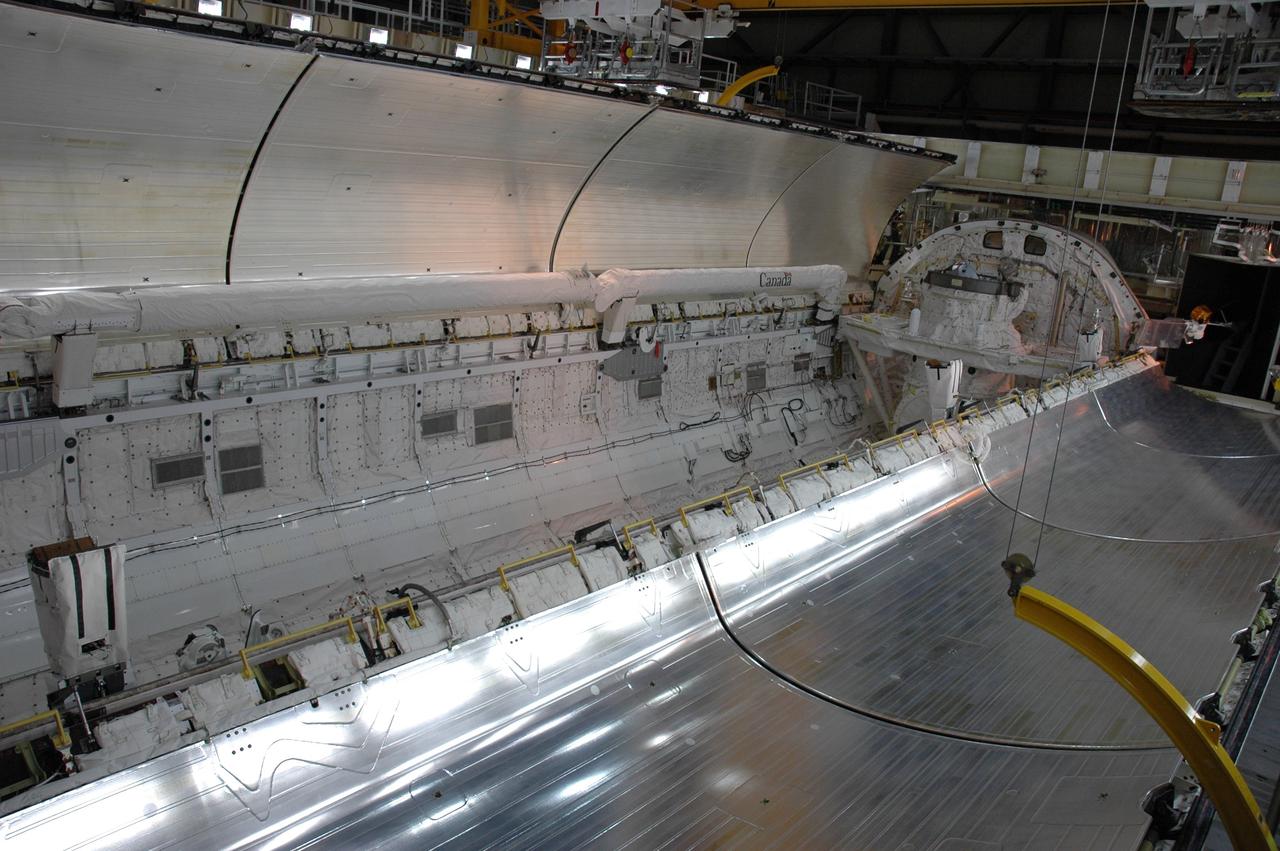
S116-E-05208 (10 Dec. 2006) --- As seen through windows on the aft flight deck of Space Shuttle Discovery, the payload bay is featured in this image photographed by a STS-116 crewmember during flight day two activities. Pictured in the payload bay is the Spacehab module and the Canadian-built Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) is at left. The shuttle's docking mechanism is visible in the foreground.
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, workers are installing the Orbital Boom Sensor System (foreground) in Atlantis’ payload bay. The 50-foot-long OBSS attaches to the Remote Manipulator System (background), or Shuttle robotic arm, and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in July.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 3, workers install the Orbiter Boom Sensor System (OBSS) onto the starboard side of Discovery’s payload bay. The 50-foot-long OBSS attaches to the Remote Manipulator System, or Shuttle robotic arm, and is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. The Return to Flight mission, STS-114, has a launch window of May 12 to June 3, 2005.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA’s Kennedy Space Center, workers are installing the Orbital Boom Sensor System (foreground) in Atlantis’ payload bay. The 50-foot-long OBSS attaches to the Remote Manipulator System (background), or Shuttle robotic arm, and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Mission STS-121 is targeted for launch in July.
STS039-27-016 (28 April-6 May 1991) --- The Space Shuttle Discovery fires reaction control subsystem (RCS) thrusters in this 35mm frame, taken from inside the crew cabin. Seen in Discovery's payload bay are the tops of cannisters on the STP-1 payload, configured on the STS 39 Hitchhiker carrier; and the Air Force Program (AFP) 675 package. AFP-675 consists of the Cryogenic Infrared Radiance Instrumentation for Shuttle (CIRRIS)-1A; Far Ultraviolet Camera (FAR-UV) Experiment; Horizon Ultraviolet Program (HUP); Quadruple Ion Neutral Mass Spectrometer (QINMS); and the Uniformly Redundant Array (URA).

CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, STS-124 Mission Specialists Mike Fossum (left) and Ron Garan team up to look at the Japanese Remote Manipulator System in space shuttle Discovery's payload bay. The payload bay walkdown is part of the launch dress rehearsal called the terminal countdown demonstration test. TCDT provides astronauts and ground crews with an opportunity to participate in various simulated countdown activities, including equipment familiarization and emergency training. On the STS-124 mission, the crew will deliver and install the Japanese Experiment Module – Pressurized Module and Japanese Remote Manipulator System. Discovery's launch is targeted for May 31. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, engineers finish attaching the remote manipulator system, or boom, in Atlantis’ payload bay. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.

S84-27039 (7 Feb 1984) --- Astronaut Bruce McCandless II, at first glance appears to be walking on cargo in the Space Shuttle Challenger's payload bay. Actually, he is being "flown" around above the stationary cargo. His "flight" is due to the combined configuration of the Mobile Foot Restraint (MFR) and the Remote Manipulator System (RMS). His helmet visor reflects in miniature parts of the payload bay that can't be seen in the larger portion of the photo. A 70mm camera aimed through the aft flight deck windows exposed this frame.
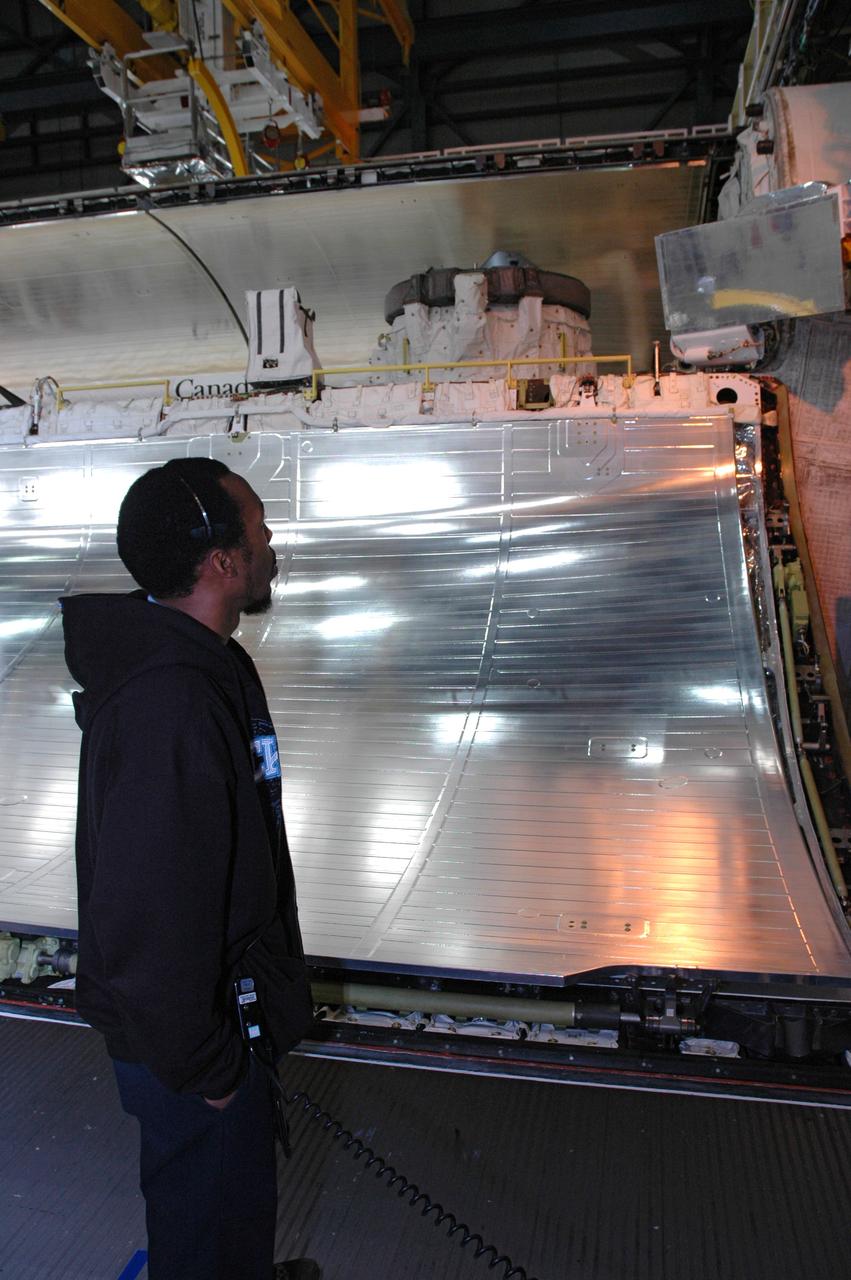
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, a worker observes space shuttle Discovery's payload bay as the doors are closed. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

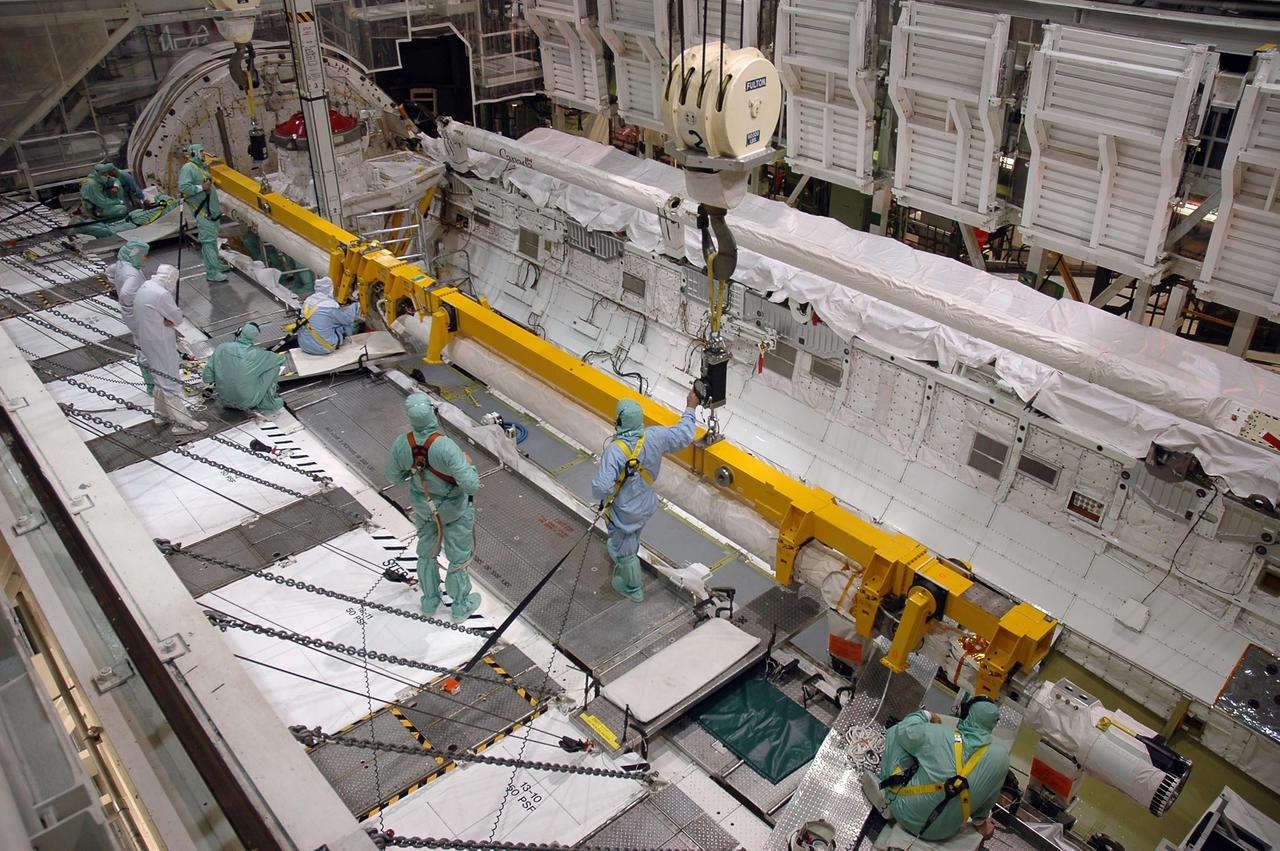
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, the remote manipulator system, or boom, is lowered into Atlantis’ payload bay for installation. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.
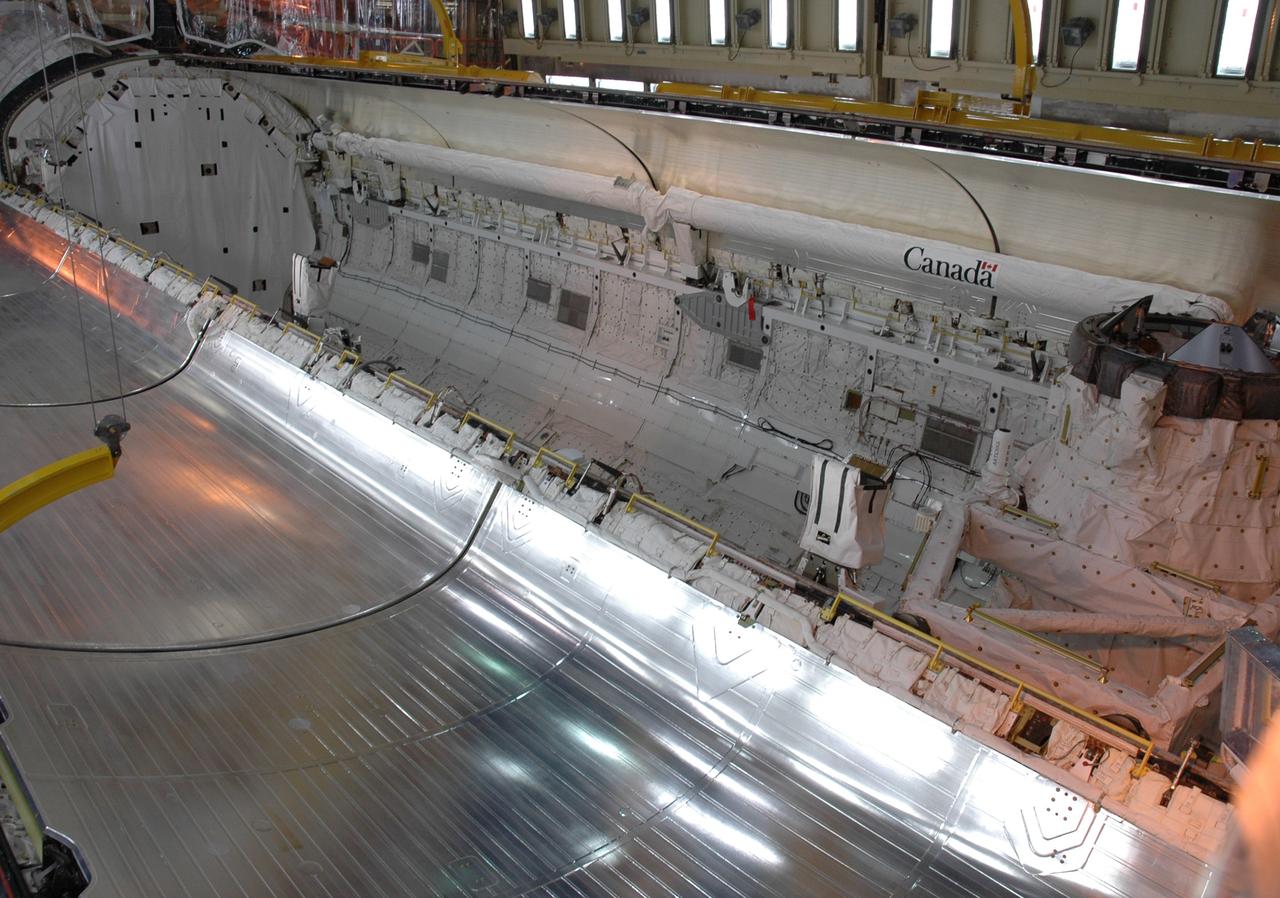
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay door at right is nearly closed. Below the door is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, the remote manipulator system, or boom, is lifted off a stand via overhead cranes. The boom will be installed in Atlantis’ payload bay. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, engineers stand by as the remote manipulator system, or boom, is lowered toward Atlantis’ payload bay for installation. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.

CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's second payload bay door, at right, is beginning to close. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, overhead cranes lift the remote manipulator system, or boom, to move it to Atlantis’ payload bay for installation. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility bay 1 at NASA Kennedy Space Center, engineers begin attaching the remote manipulator system, or boom, in Atlantis’ payload bay. Atlantis is the designated orbiter for mission STS-115, the 19th assembly flight to the International Space Station. The payload includes the P3/P4 solar arrays. The launch planning window has not been determined yet for STS-115.
CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay doors are ready to close. Along the hinge of the door at left is the shuttle's robotic arm. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes
CAPE CANAVERAL, Fla. ---In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's second payload bay door is nearly closed. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes
CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, the Japanese Experiment Module—Pressurized Module is in place in space shuttle Discovery's payload bay as the payload bay doors begin to close. The launch of Discovery on its STS-124 mission is targeted for May 31. On the mission, Discovery will transport the pressurized module and the Japanese Remote Manipulator System to the International Space Station. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. - This overview shows Atlantis’ payload bay in the Orbiter Processing Facility at NASA’s Kennedy Space Center. At left is the Remote Manipulator System, or Shuttle robotic arm. Technicians have been installing and checking the base of the Manipulator Positioning Mechanism (MPM) on the starboard side. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.

S85-E-5044 (12 August 1997) --- View of the payload bay of the Earth-orbiting Space Shuttle Discovery looking toward the shuttle's vertical stabilizer with clouds in the background. Easily recognized is the Manipulator Flight Demonstration (MFD), which is sponsored by Japan's National Space Development Agency (NASDA). MFD will evaluate the use of the Small Fine Arm (SFA) that is planned to be part of the future Japanese Experiment Module's Remote Manipulator System (RMS) on the International Space Station (ISS). The photograph was taken with the Electronic Still Camera (ESC).

STS085-316-026 (7 - 19 August 1997) --- Wearing a head band representing the Manipulator Flight Demonstration (MFD) hardware several feet away in the open cargo bay of the Space Shuttle Discovery, astronaut N. Jan Davis, payload commander, performs MFD operations at the experiment's work station. This flight of the MFD is in preparation for the Japanese Experiment Module (JEM) Remote Manipulator System (RMS) Small Fine Arm (SFA).

S127-E-006954 (19 July 2009) --- Astronaut Christopher Cassidy, STS-127 mission specialist, is pictured on the mid deck of the Space Shuttle Endeavour on a day between two days during which he is assigned support duty for space-walking crewmates. Meanwhile "upstairs" on the flight deck, crewmates are using remote controls and the Canadian-built remote manipulator system (RMS) arm to move the Integrated Cargo Carrier from Endeavour's payload bay.
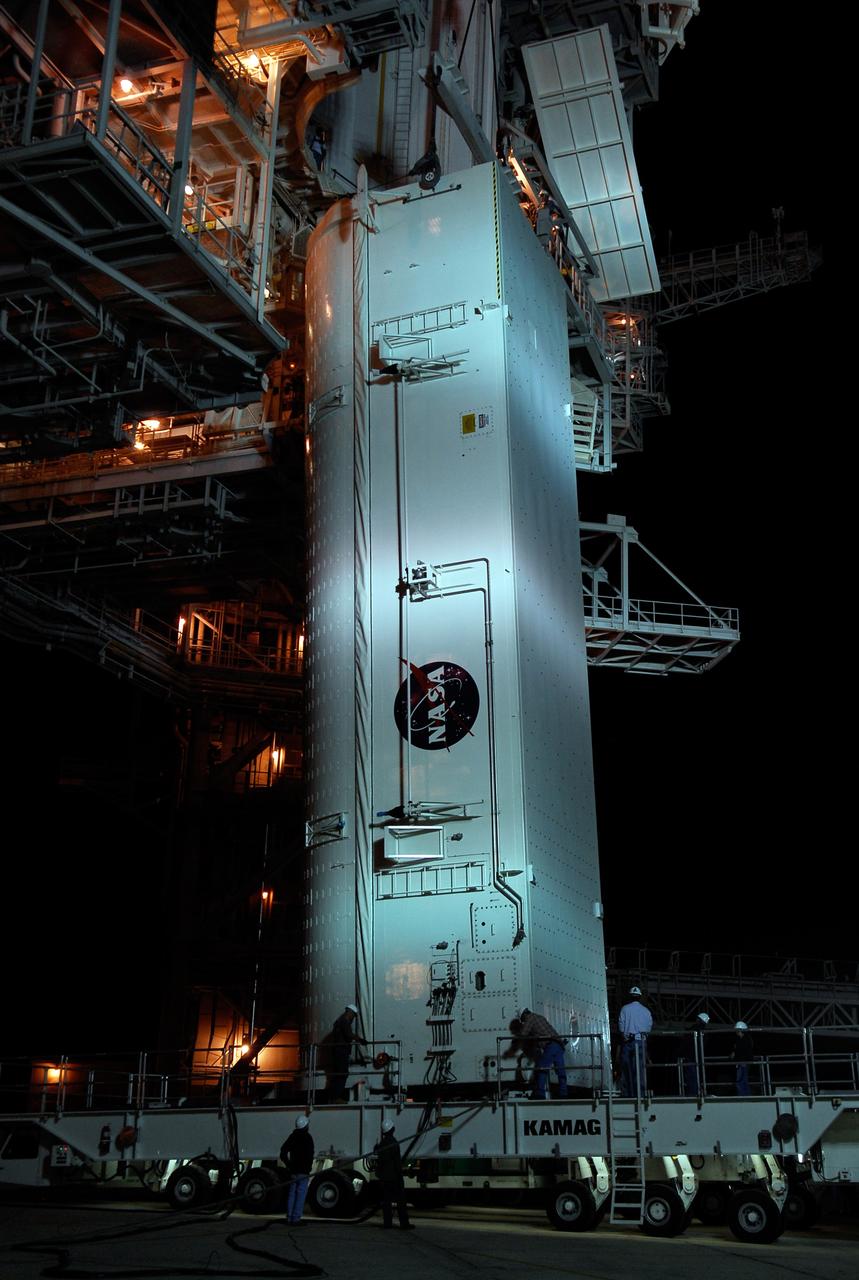
CAPE CANAVERAL, Fla. – On Launch Pad 39A at NASA's Kennedy Space Center, workers on the payload canister transporter prepare for the lifting of the payload canister to the waiting payload changeout room above. Inside the canister are the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, or RMS, for the STS-124 mission. The changeout room is the enclosed, environmentally controlled portion of the service structure that supports cargo delivery to the pad and subsequent vertical installation into an orbiter's payload bay. From the payload changeout room, the pressurized module and RMS then will be transferred into space shuttle Discovery’s payload bay. Launch is targeted for May 31. Photo credit: NASA/Kim Shiflett
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at Kennedy Space Center in Florida, the payload bay doors of the orbiter Atlantis are being closed. The Remote Manipulator System, or Shuttle arm, is seen on the port side (top) and the Orbiter Boom Sensor System (OBSS) is seen on the starboard side (lower) of the payload bay. The 50-foot-long OBSS attaches to the Shuttle arm and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Atlantis is scheduled to fly on the second Return to Flight mission, STS-121, targeted for launch in a window extending from Sept. 9 to Sept. 24.
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at Kennedy Space Center in Florida, the payload bay doors of the orbiter Atlantis are being closed. The Remote Manipulator System, or Shuttle arm, is seen on the port side (top) and the Orbiter Boom Sensor System (OBSS) is seen on the starboard side (lower) of the payload bay. The 50-foot-long OBSS attaches to the Shuttle arm and is one of the new safety measures for Return to Flight. It equips the orbiter with cameras and laser systems to inspect the Shuttle’s Thermal Protection System while in space. Atlantis is scheduled to fly on the second Return to Flight mission, STS-121, targeted for launch in a window extending from Sept. 9 to Sept. 24.
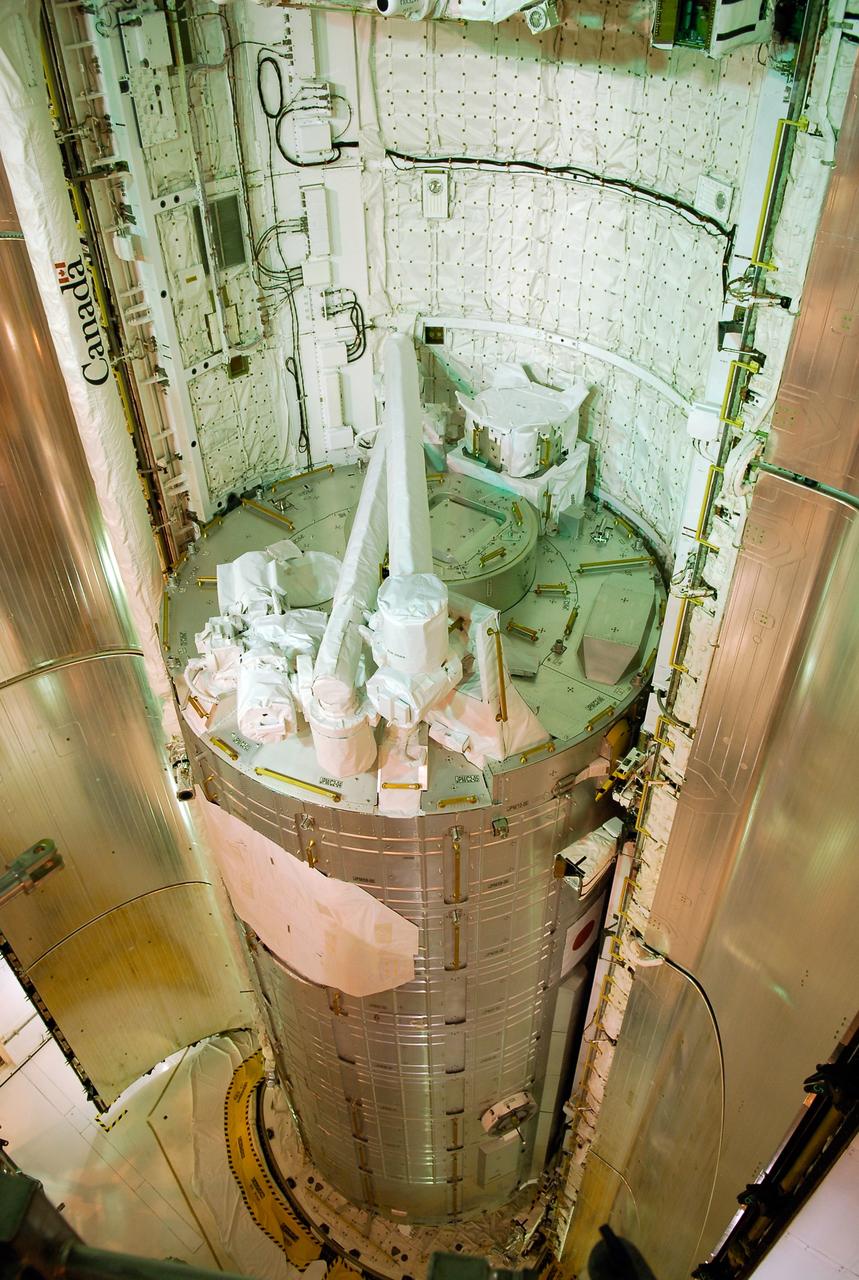
CAPE CANAVERAL, Fla. -- On Launch Pad 39A at NASA's Kennedy Space Center, the STS-124 mission payload, the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, are being transferred from the Payload Changeout Room into space shuttle Discovery's payload bay. Seen here on top is the RMS. Below is the pressurized module. Launch of Discovery is targeted for May 31. Photo credit: NASA/Jim Grossmann

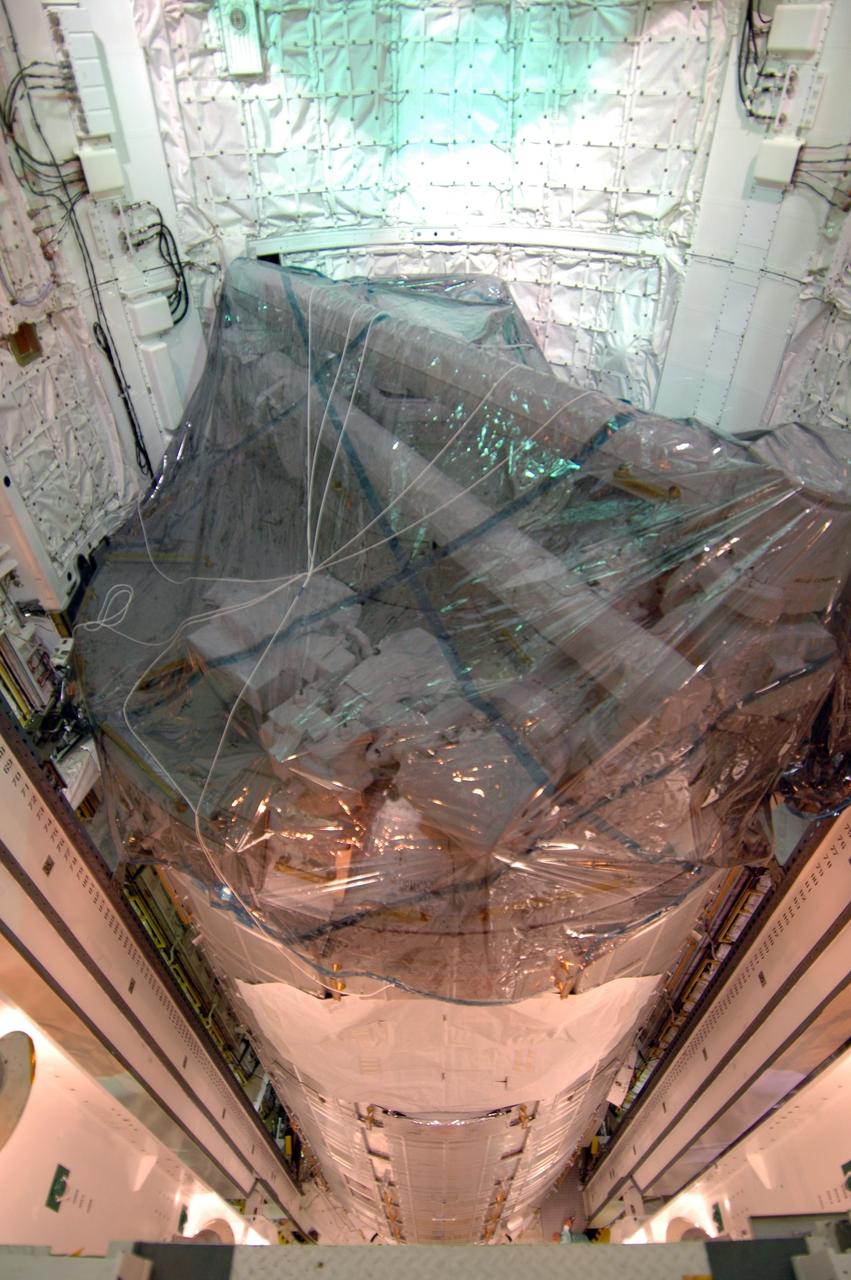
CAPE CANAVERAL, Fla. -- Technicians in the Payload Changeout Room on Launch Pad 39A at NASA's Kennedy Space Center monitor the transfer of the STS-124 mission payload, the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System into space shuttle Discovery's payload bay. Launch of Discovery is targeted for May 31. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. – On Launch Pad 39A at NASA's Kennedy Space Center, the payload canister with the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, or RMS, inside arrives in position below the payload changeout room on the rotating service structure. The changeout room is the enclosed, environmentally controlled portion of the service structure that supports cargo delivery to the pad and subsequent vertical installation into an orbiter's payload bay. From the payload changeout room, the pressurized module and RMS then will be transferred into space shuttle Discovery’s payload bay. Launch is targeted for May 31. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – The sun sets behind Launch Pad 39A at NASA's Kennedy Space Center where the payload canister with the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, or RMS, inside awaits cargo transfer to the payload changeout room above. The changeout room is the enclosed, environmentally controlled portion of the service structure that supports cargo delivery to the pad and subsequent vertical installation into an orbiter's payload bay. From the payload changeout room, the pressurized module and RMS then will be transferred into space shuttle Discovery’s payload bay. Launch is targeted for May 31. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – On Launch Pad 39A at NASA's Kennedy Space Center, the payload canister has been lifted up to the payload changeout room for transfer of its cargo. Inside the canister are the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, or RMS, for the STS-124 mission. The changeout room is the enclosed, environmentally controlled portion of the service structure that supports cargo delivery to the pad and subsequent vertical installation into an orbiter's payload bay. From the payload changeout room, the pressurized module and RMS then will be transferred into space shuttle Discovery’s payload bay. Launch is targeted for May 31. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. – On Launch Pad 39A at NASA's Kennedy Space Center, the payload canister has been lifted up to the payload changeout room for transfer of its cargo. Inside the canister are the Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System, or RMS, for the STS-124 mission. The changeout room is the enclosed, environmentally controlled portion of the service structure that supports cargo delivery to the pad and subsequent vertical installation into an orbiter's payload bay. From the payload changeout room, the pressurized module and RMS then will be transferred into space shuttle Discovery’s payload bay. Launch is targeted for May 31. Photo credit: NASA/Kim Shiflett

S115-E-05305 (10 Sept. 2006) --- While working to survey the thermal protection system on the Space Shuttle Atlantis, the orbiter boom sensor system (OBSS), attached to the remote manipulator system (RMS) arm was positioned near the shuttle's aft cabin windows. This enabled one of the STS-115 crewmembers to record this digital still image of the Canadian-built system and some of the hardware stowed in the payload bay of the shuttle, as well as the vertical stabilizer and the two orbital maneuvering system (OMS) pods.
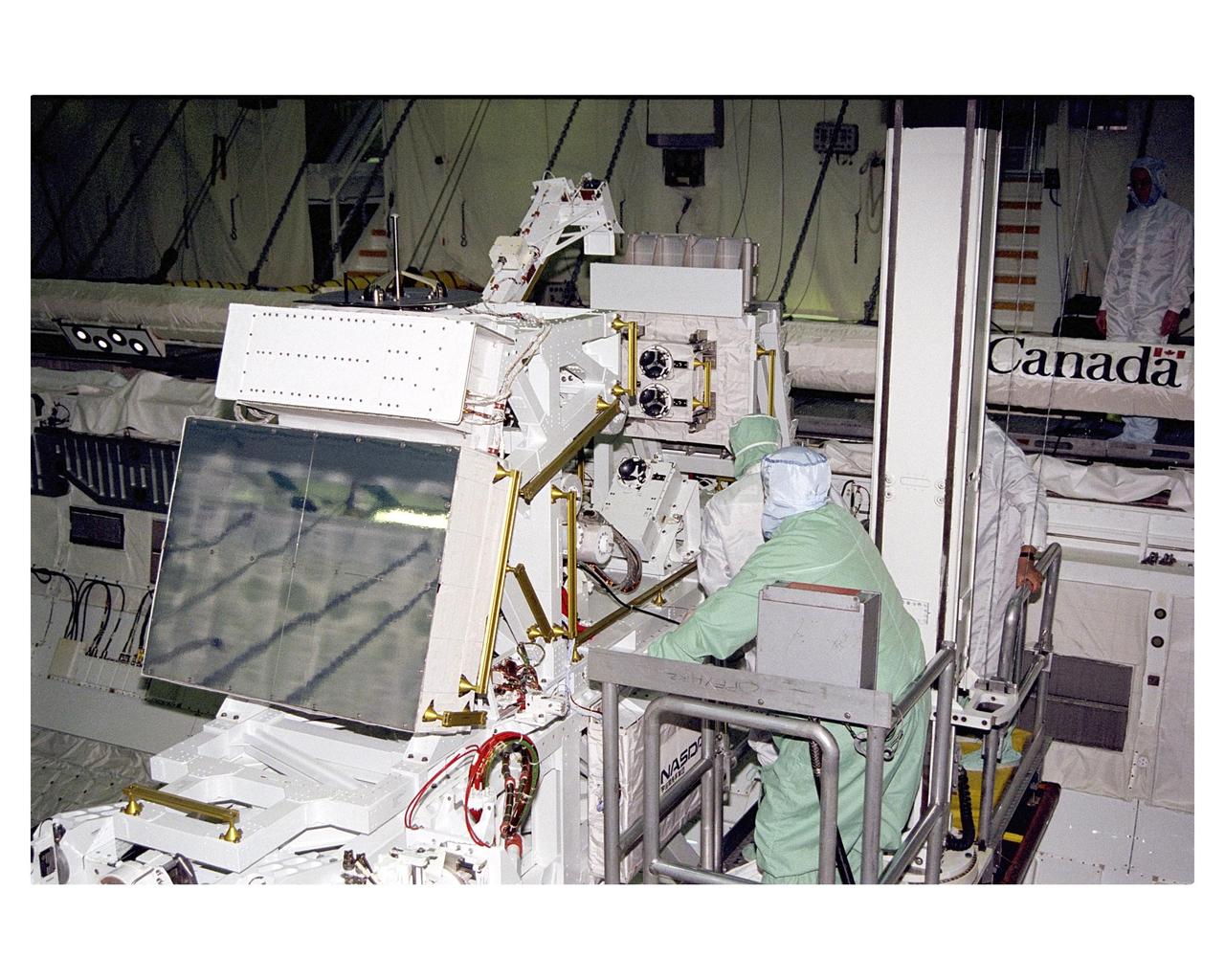
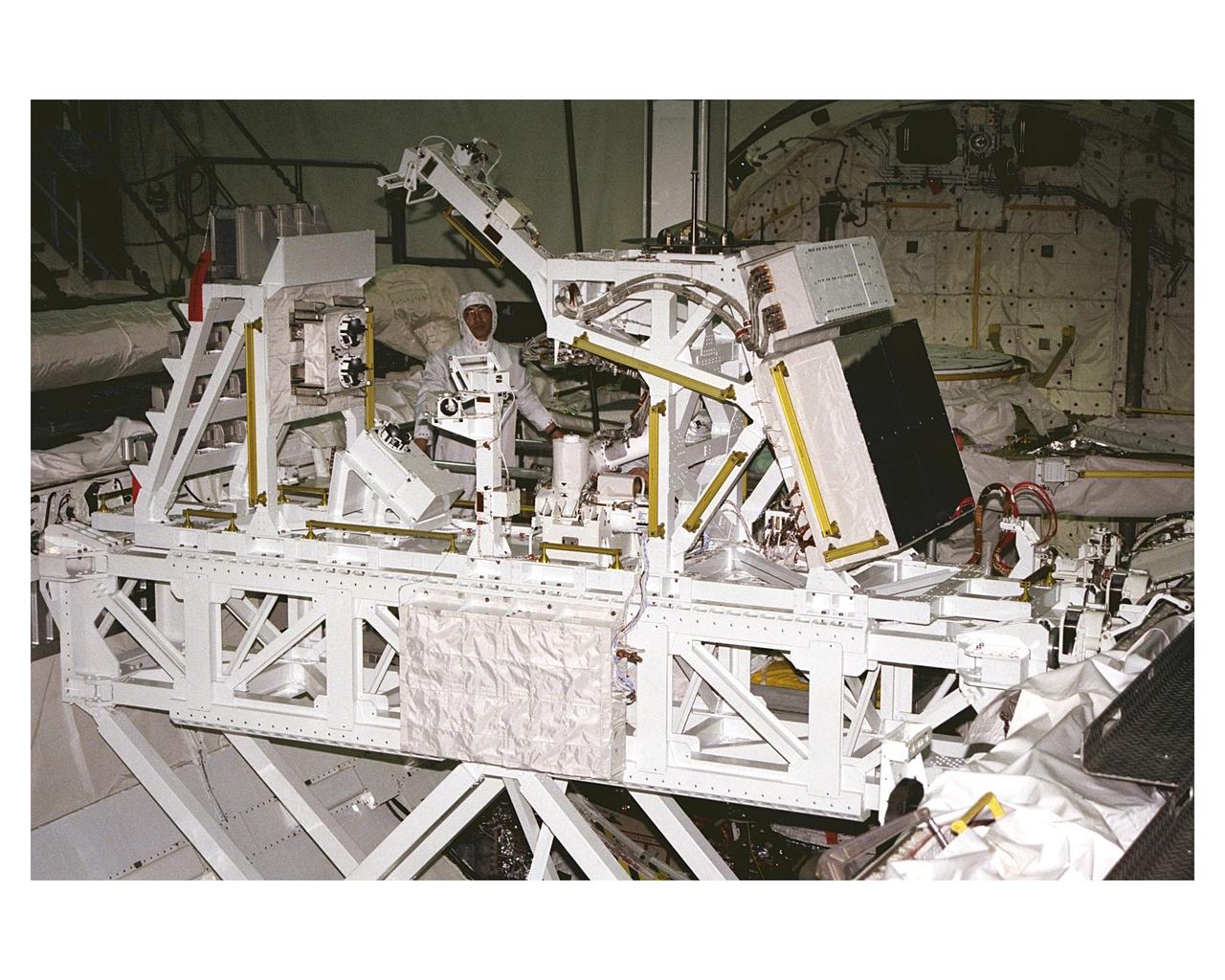
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
The Manipulator Flight Demonstration (MFD) payload is installed into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA- SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
The Manipulator Flight Demonstration (MFD) payload is prepared for hoisting and installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments
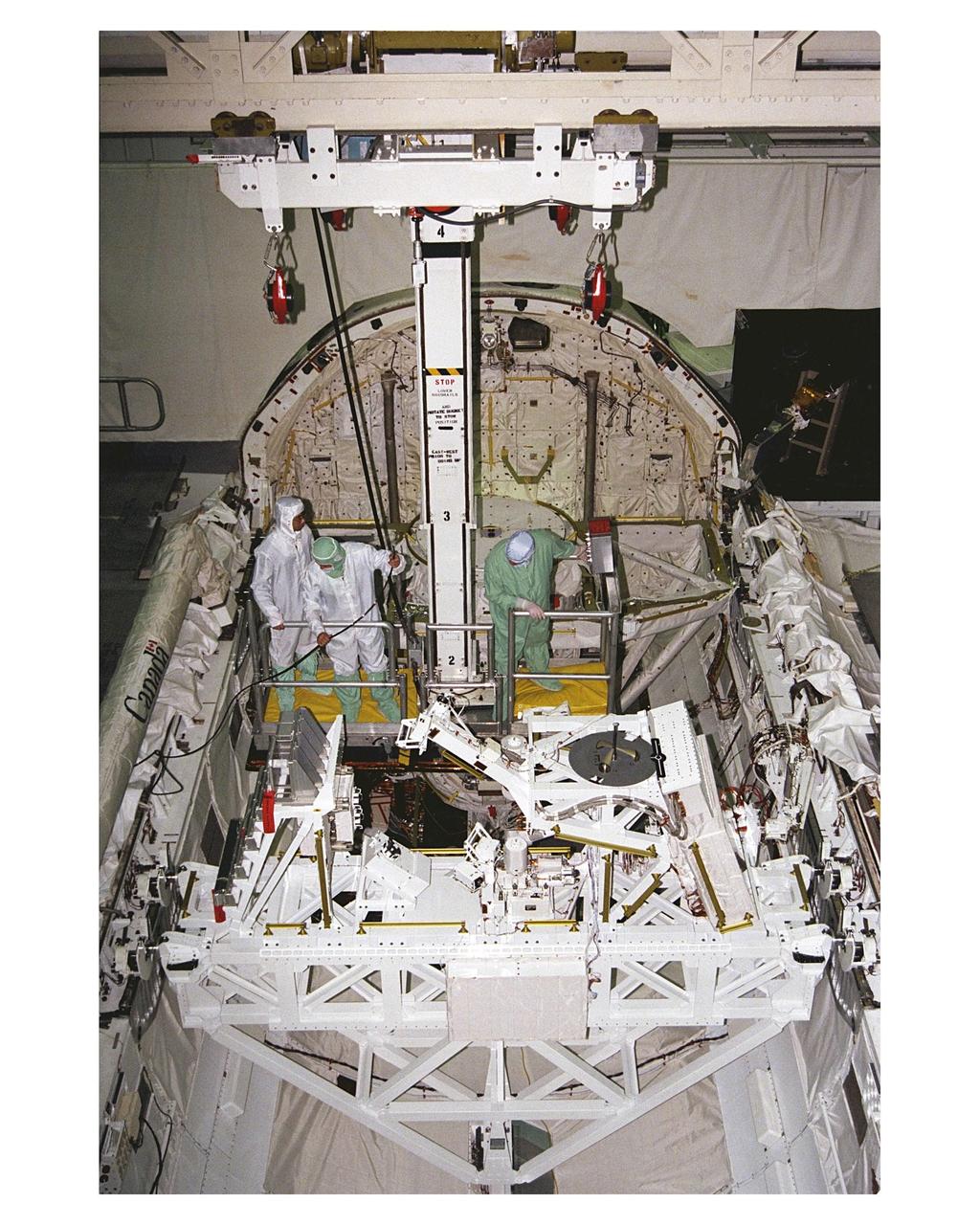
The Manipulator Flight Demonstration (MFD) payload is lowered into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectro-meters and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

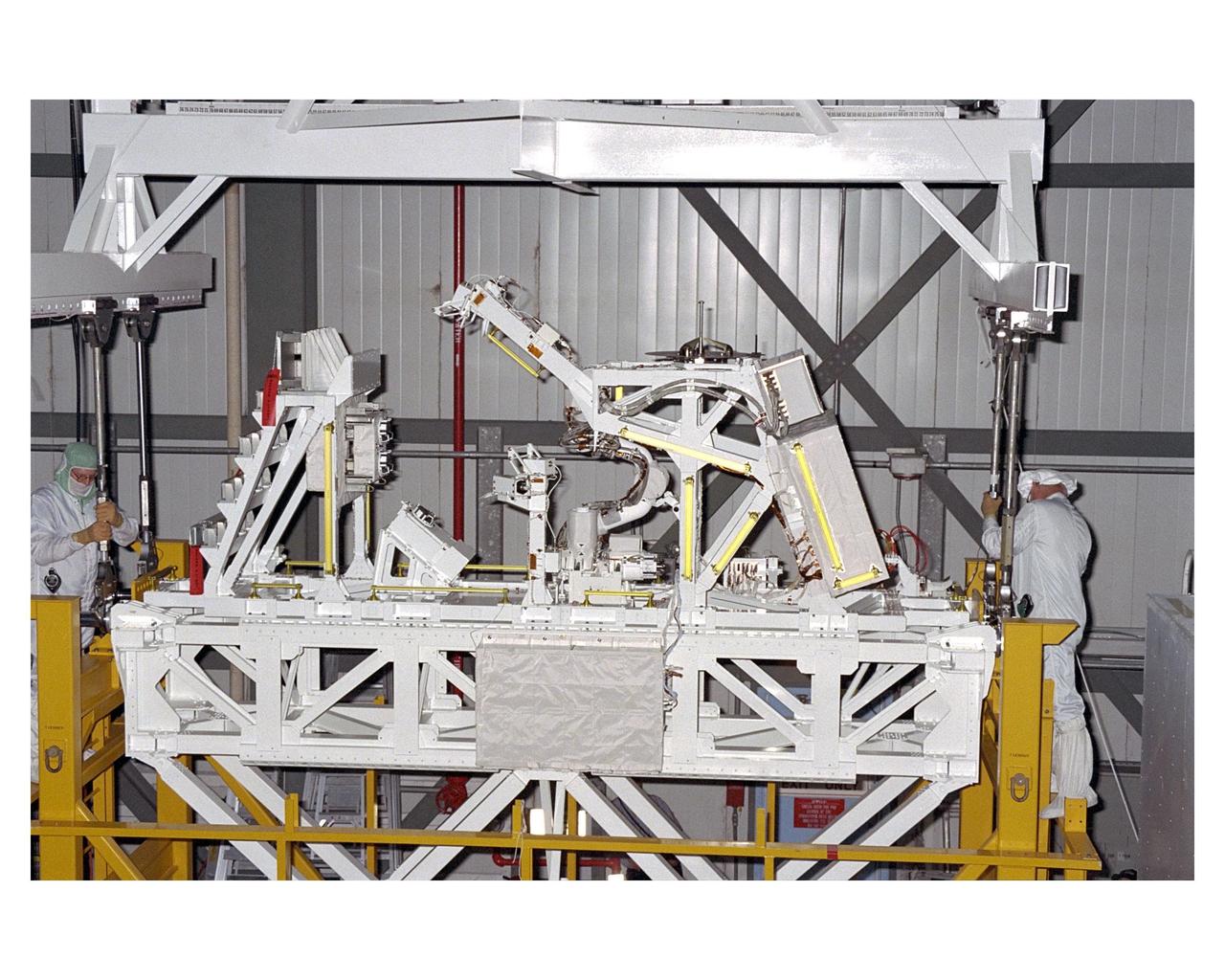
The Manipulator Flight Demonstration (MFD) payload is hoisted for installation into the payload bay of the Space Shuttle Orbiter Discovery in Orbiter Processing Facility 2. The MFD is one of several payloads that will fly on the STS-85 mission. This payload is designed to test the operational capability of the Japanese Experiment Module Remote Manipulator System (JEM RMS) Small Fine Arm (SFA), which can be seen atop its Multi-Purpose Experiment Support Structure (MPESS) carrier that will serve as a platform in the payload bay for the robotic arm experiment. The arm, which will be a part of the JEM element of the International Space Station, will be operated from the orbiter’s aft flight deck during the 11-day mission. Other payloads that will be aboard Discovery on this space flight include the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2), Technology Applications and Science-1 (TAS-1) and International Extreme Ultraviolet Hitchhiker (IEH-2) experiments

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at NASA’s Kennedy Space Center, technicians check out the base of the Manipulator Positioning Mechanism (MPM) installed on the starboard side of Atlantis’ payload bay. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.
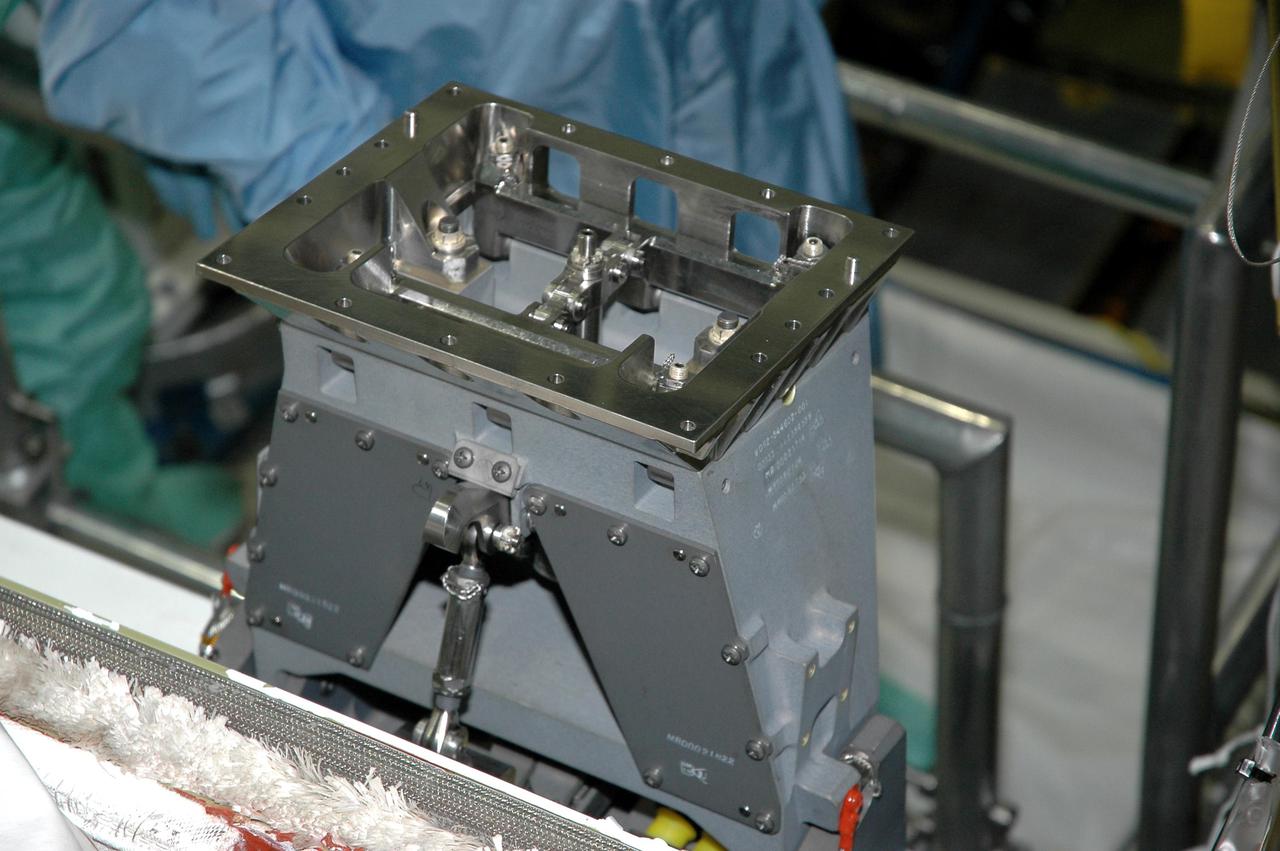
KENNEDY SPACE CENTER, FLA. - A close-up is shown of the base of the Manipulator Positioning Mechanism (MPM) installed on the starboard side of Atlantis’ payload bay in the Orbiter Processing Facility at NASA’s Kennedy Space Center. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at NASA’s Kennedy Space Center, technicians install the pedestal of the Manipulator Positioning Mechanism (MPM) on the starboard side of Atlantis’ payload bay. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at NASA’s Kennedy Space Center, technicians install the pedestal of the Manipulator Positioning Mechanism (MPM) on the starboard side of Atlantis’ payload bay. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at NASA’s Kennedy Space Center, technicians install the base of the Manipulator Positioning Mechanism (MPM) on the starboard side of Atlantis’ payload bay. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility at NASA’s Kennedy Space Center, technicians check the installation of the pedestal of the Manipulator Positioning Mechanism (MPM) on the starboard side of Atlantis’ payload bay. The MPM will hold the 50-foot-long Orbiter Boom Sensor System (OBSS) that will attach to the Remote Manipulator System, or Shuttle robotic arm. The OBSS is one of the new safety measures for Return to Flight, equipping the orbiter with cameras and laser systems to inspect the Shuttle's Thermal Protection System while in space. Atlantis is scheduled to fly on Return to Flight mission STS-121, which has a launch window of July 12 to July 31, 2005.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, a crane lifts the remote manipulator system boom out of Atlantis’ payload bay. The boom will be temporarily stored. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, the remote manipulator system boom that was removed from Atlantis’ payload bay is lifted out of the way. The boom will be temporarily stored. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, the remote manipulator system boom is lifted away from Atlantis’ payload bay and will be temporarily stored. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.

KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, a crane is lowered toward the remote manipulator system boom in Atlantis’ payload bay. The boom is being removed from Atlantis and will be temporarily stored. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.
KENNEDY SPACE CENTER, FLA. - In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, workers secure a crane to the remote manipulator system boom in Atlantis’ payload bay. The boom is being removed from Atlantis and will be temporarily stored.. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.

KENNEDY SPACE CENTER, FLA. -In the Orbiter Processing Facility Bay 1 at NASA Kennedy Space Center, a crane is attached to the remote manipulator system boom in Atlantis’ payload bay. The boom is being removed from Atlantis and will be temporarily stored. The RMS includes the electromechanical arm that maneuvers a payload from the payload bay of the orbiter to its deployment position and then releases it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. The RMS arm is 50 feet 3 inches long and 15 inches in diameter. It weighs 905 pounds, and the total system weighs 994 pounds. The RMS has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload.
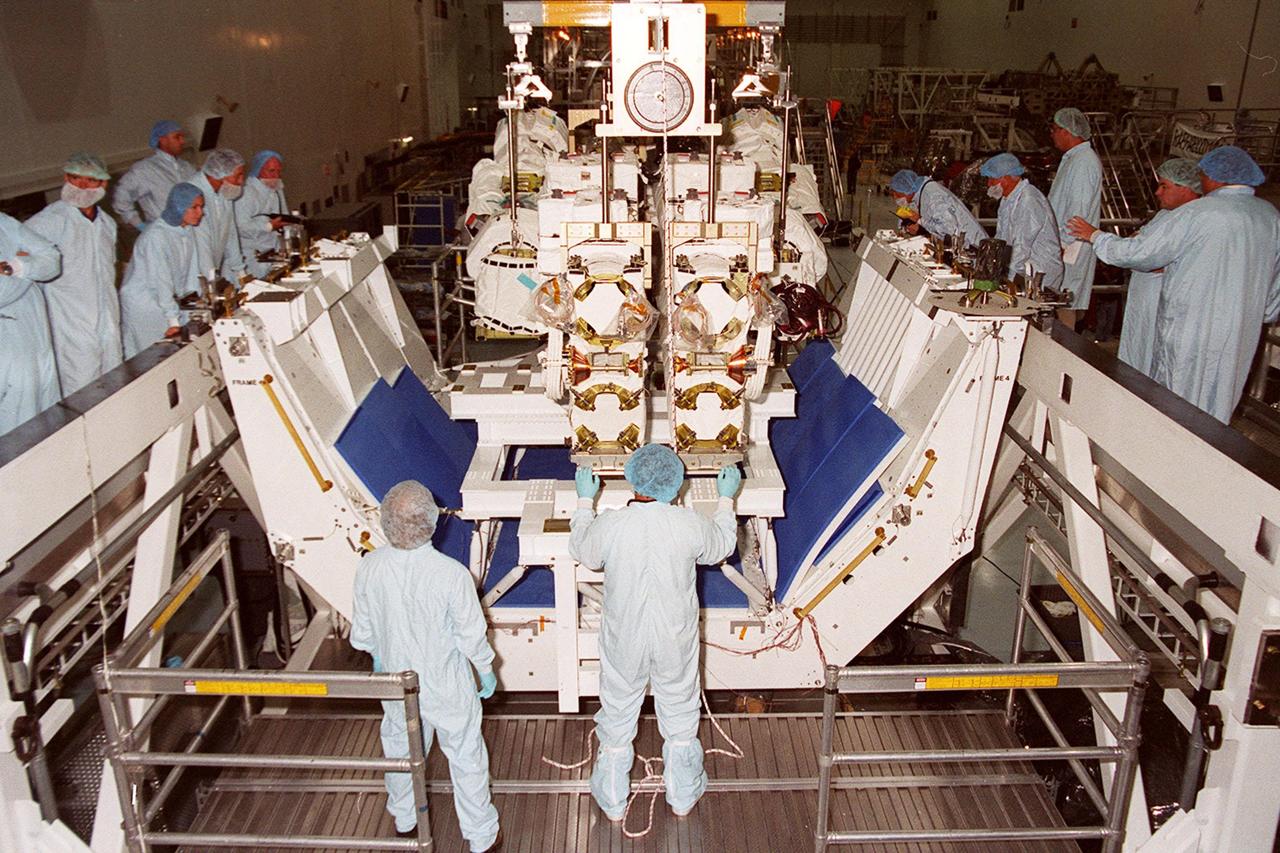
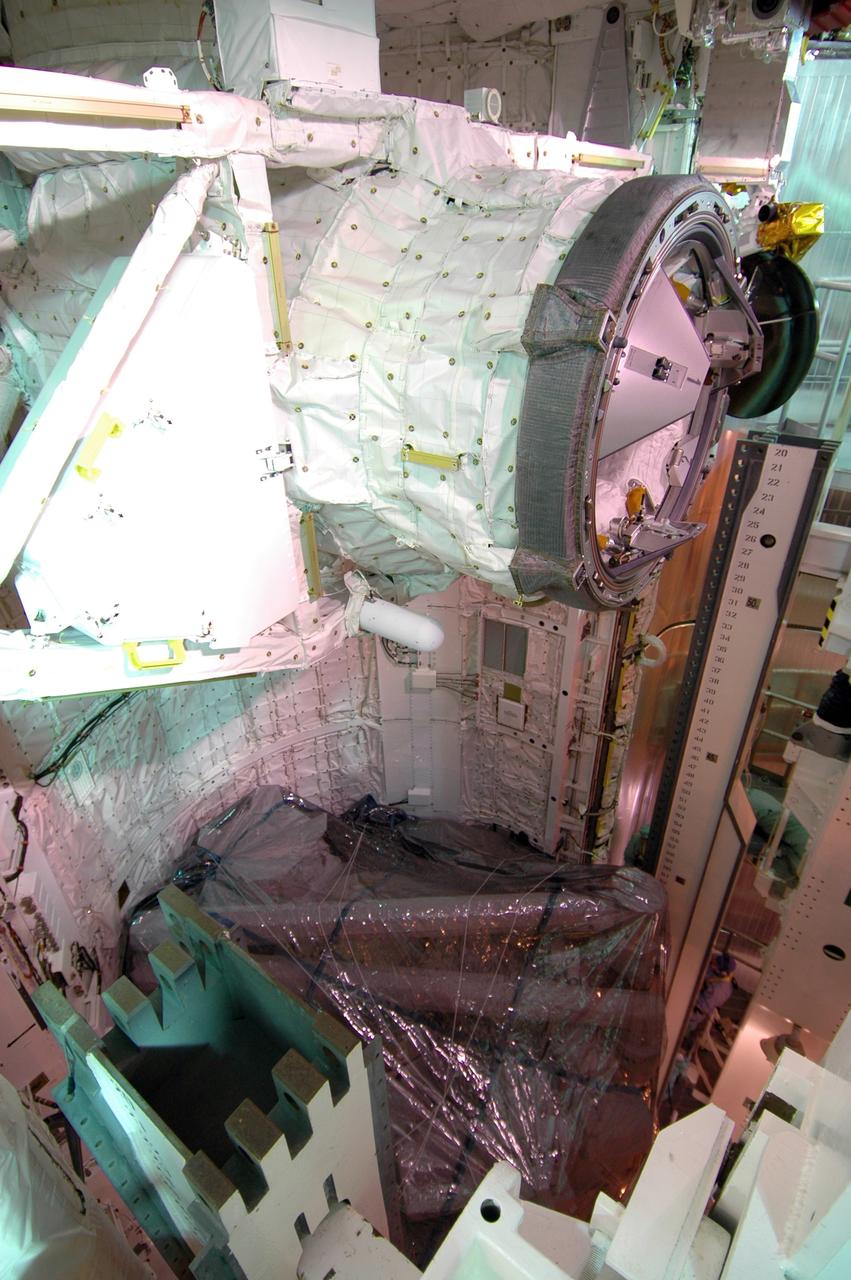
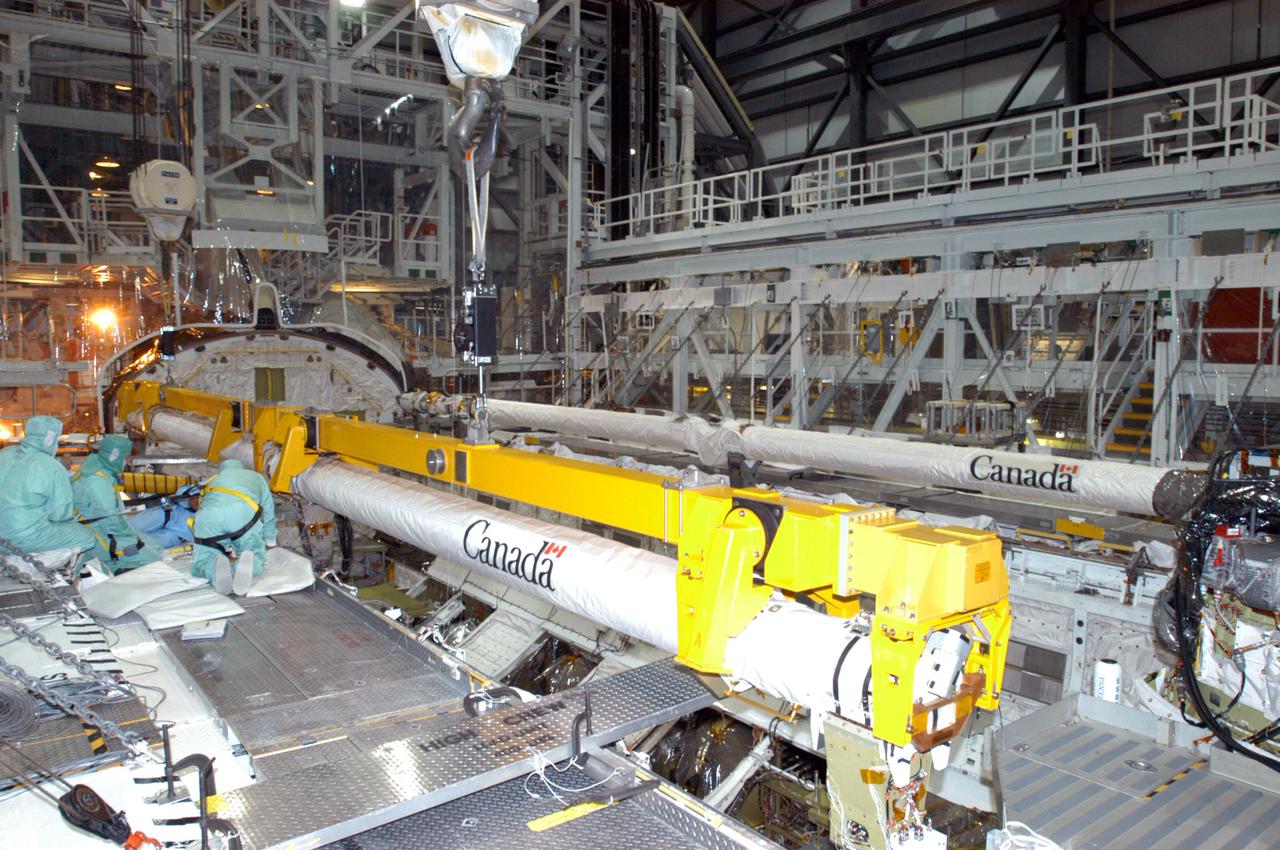
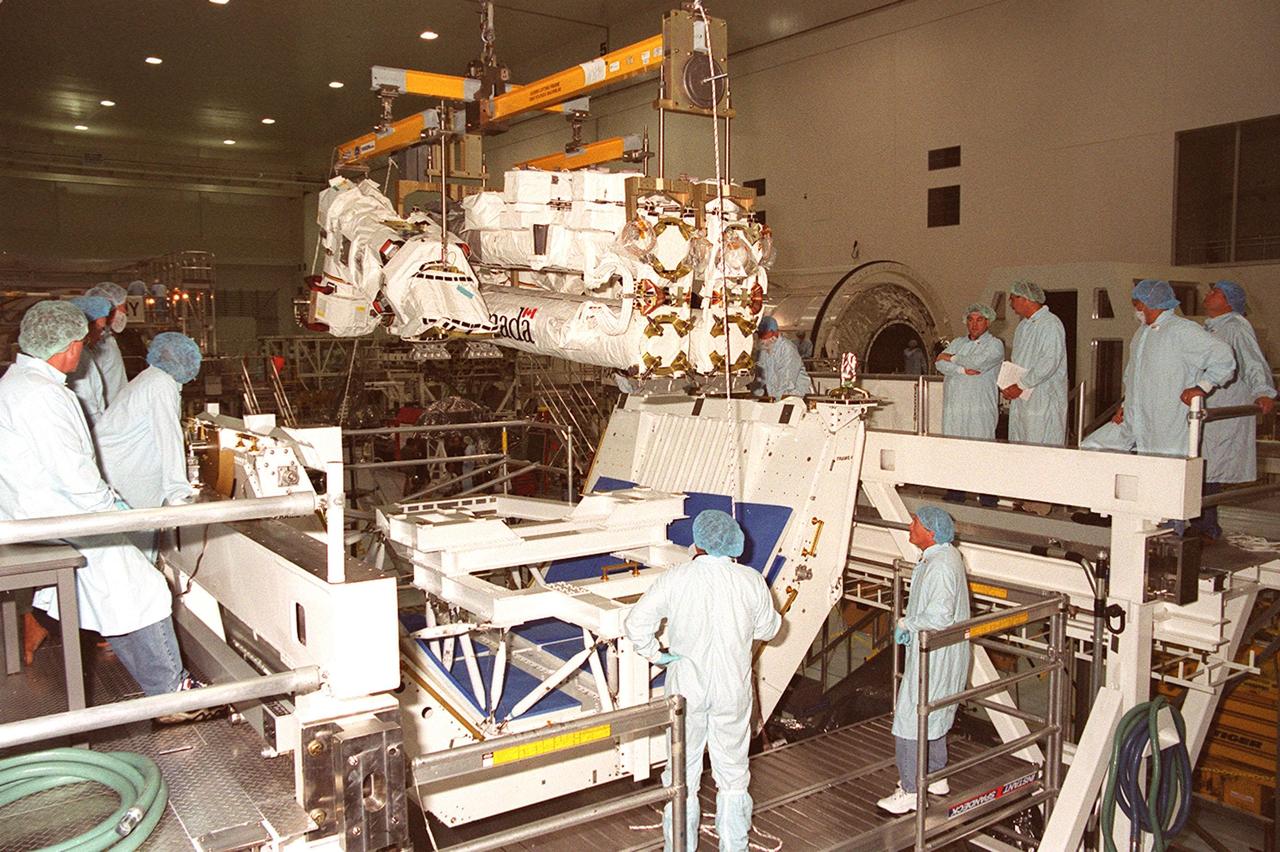
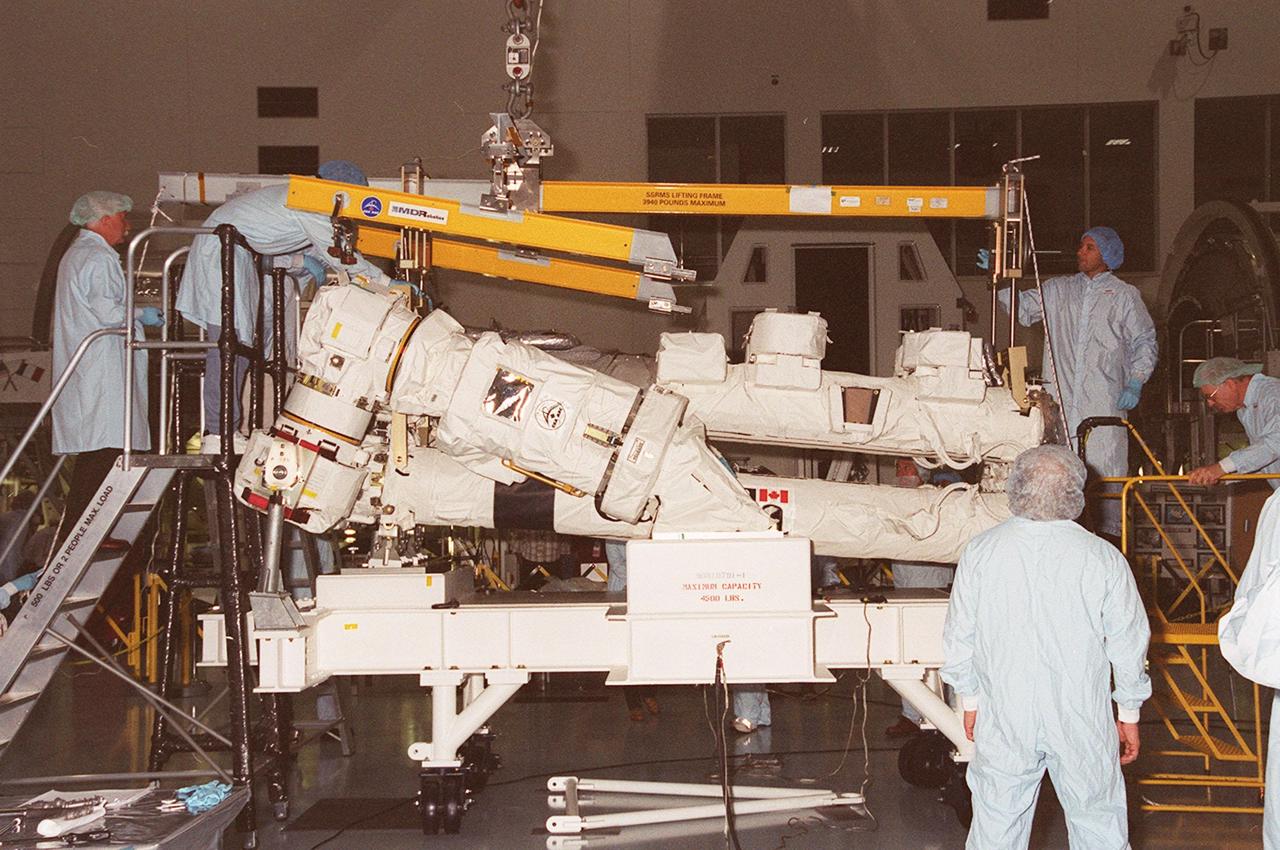
The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) is lowered onto a test stand in the Space Station Processing Facility. At the test stand the SSRMS will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) now occupies one of the work stands in the Space Station Processing Facility. There it will be mated to its payload carrier and later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

Workers in the Space Station Processing Facility help guide the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) suspended from an overhead crane. The SSRMS is being moved to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
With gentle guidance, the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) is lowered by crane onto a test stand in the Space Station Processing Facility. At the test stand the SSRMS it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

Workers in the Space Station Processing Facility help maneuver an overhead crane above the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS). The crane will lift and transfer the SSRMS to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

Workers in the Space Station Processing Facility help maneuver the Space Station Remote Manipulator System (SSRMS) onto a test stand. A component of the International Space Station provided by the Canadian Space Agency, the SSRMS will be mated to its payload carrier and later installed into the payload bay of Space Shuttle Endeavour for launch to the Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
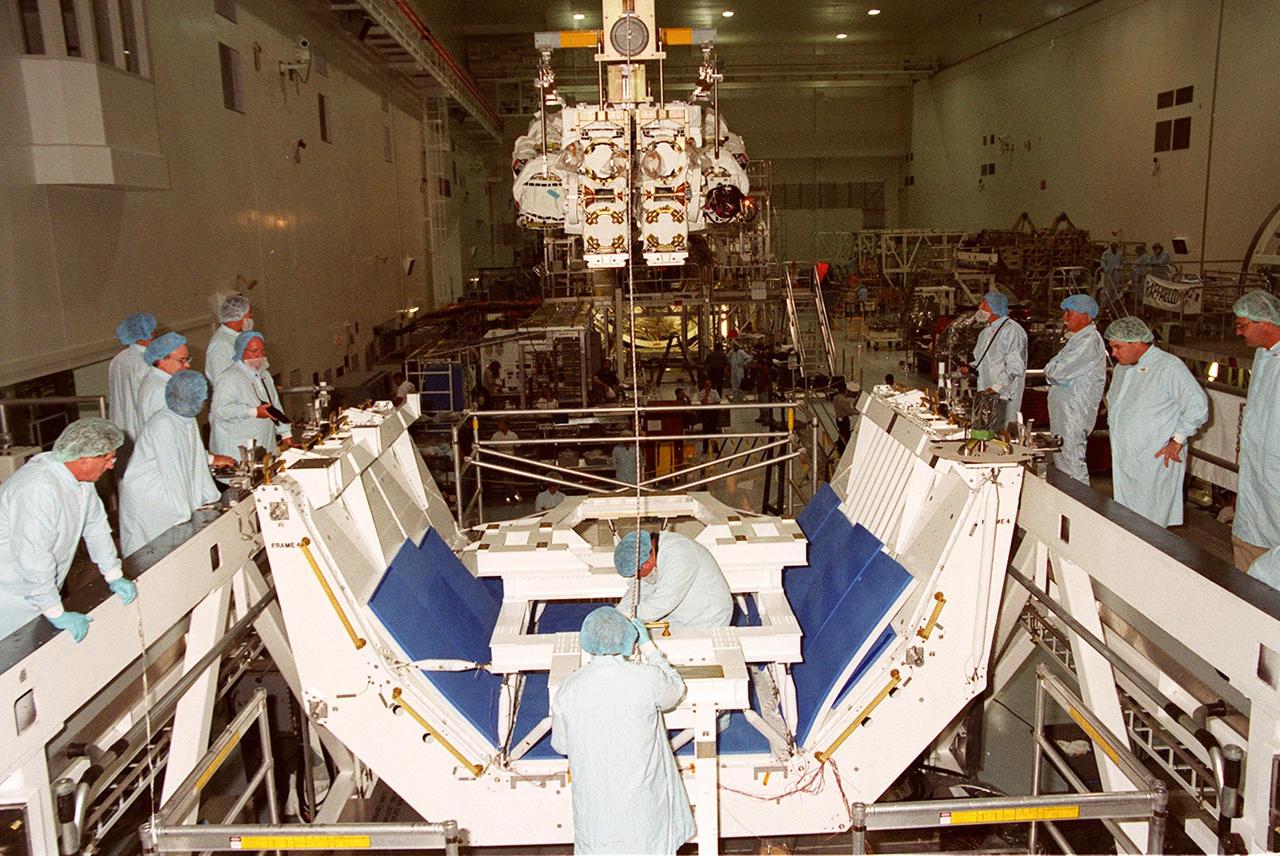
In the Space Station Processing Facility, the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS), suspended from an overhead crane, zeroes in on its destination, the test stand below. At the test stand the SSRMS it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
Workers in the Space Station Processing Facility attach an overhead crane to the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS). The crane will lift and transfer the SSRMS to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
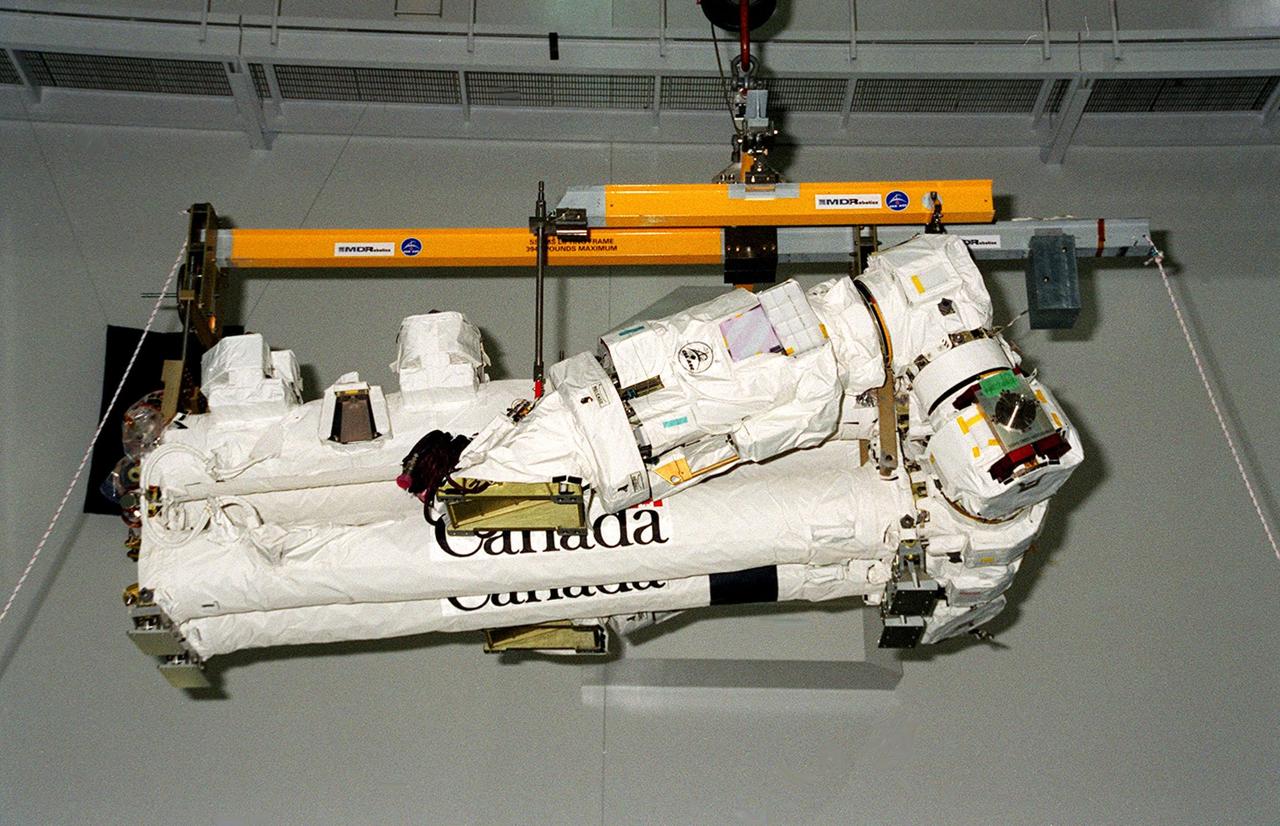
An overhead crane in the Space Station Processing Facility carries the Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) through the air to a test stand where it will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm
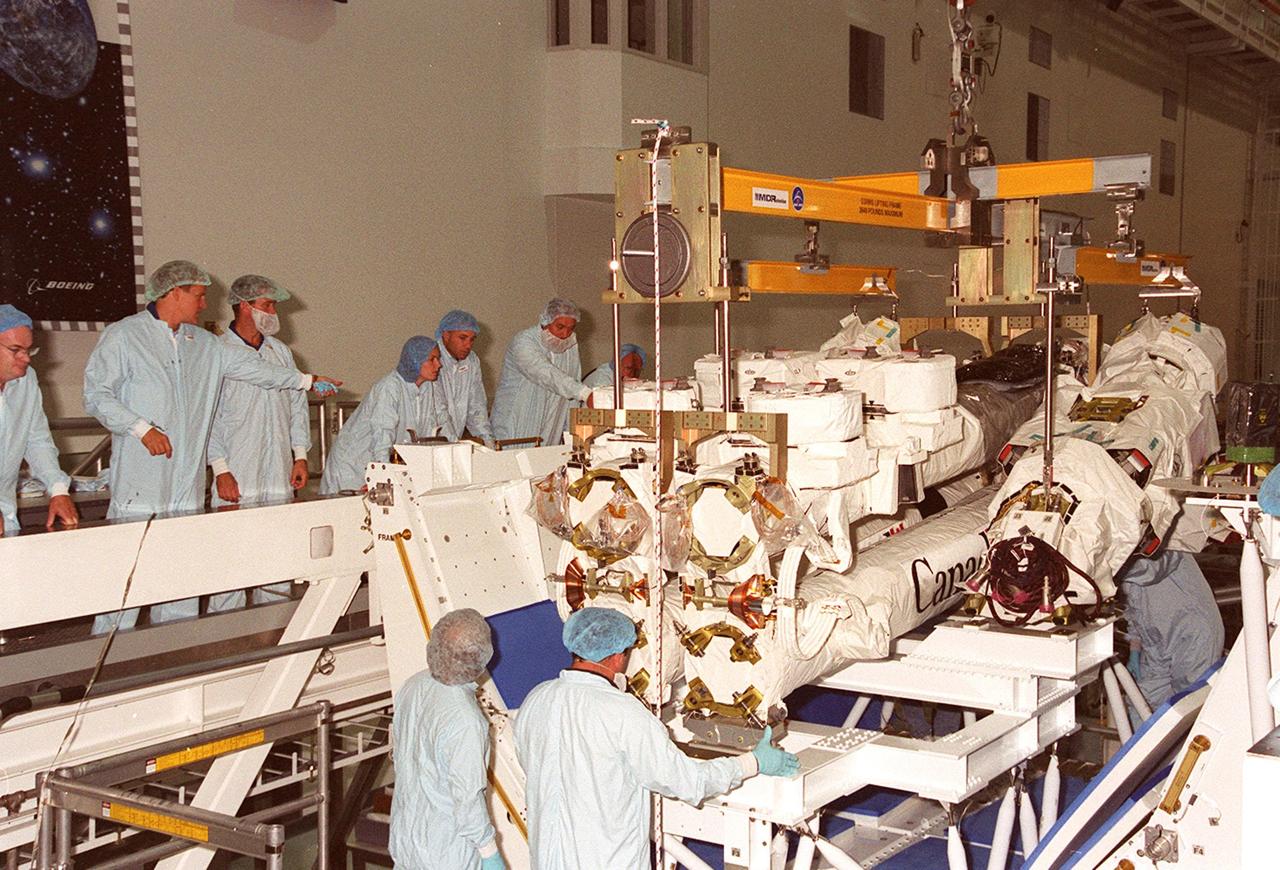
The Canadian Space Agency’s Space Station Remote Manipulator System (SSRMS) finally rests on a test stand in the Space Station Processing Facility. At the test stand the SSRMS will be mated to its payload carrier. This pallet will later be installed into the payload bay of Space Shuttle Endeavour for launch to the International Space Station on STS-100 in April 2001. The 56-foot-long arm will be the primary means of transferring payloads between the orbiter payload bay and the Station. Its three segments comprise seven joints for highly flexible land precise movement, making it capable of moving around the Station’s exterior like an inchworm

KENNEDY SPACE CENTER, FLA. - In NASA Kennedy Space Center’s Orbiter Processing Facility Bay 3, technicians install a remote manipulator system, or space shuttle arm, previously installed on the orbiter Atlantis, in Discovery’s payload bay. The arms were switched because the arm that was installed on Atlantis has special instrumentation to gather loads data from the second return-to-flight mission, STS-121. Discovery is the designated orbiter to fly on STS-121. scheduled to launch no earlier than May 2006.

KENNEDY SPACE CENTER, FLA. - In NASA Kennedy Space Center’s Orbiter Processing Facility Bay 3, technicians install a remote manipulator system, or space shuttle arm, previously installed on the orbiter Atlantis, in Discovery’s payload bay. The arms were switched because the arm that was installed on Atlantis has special instrumentation to gather loads data from the second return-to-flight mission, STS-121. Discovery is the designated orbiter to fly on STS-121. scheduled to launch no earlier than May 2006.

KENNEDY SPACE CENTER, FLA. - In NASA Kennedy Space Center’s Orbiter Processing Facility Bay 3, a remote manipulator system, or space shuttle arm, previously installed on the orbiter Atlantis, is being installed in Discovery’s payload bay. The arms were switched because the arm that was installed on Atlantis has special instrumentation to gather loads data from the second return-to-flight mission, STS-121. Discovery is the designated orbiter to fly on STS-121. scheduled to launch no earlier than May 2006.
KENNEDY SPACE CENTER, FLA. - In NASA Kennedy Space Center’s Orbiter Processing Facility Bay 3, a remote manipulator system, or space shuttle arm, previously installed on the orbiter Atlantis, is being installed in Discovery’s payload bay. The arms were switched because the arm that was installed on Atlantis has special instrumentation to gather loads data from the second return-to-flight mission, STS-121. Discovery is the designated orbiter to fly on STS-121. scheduled to launch no earlier than May 2006.

S82-E-5718 (18 Feb. 1997) --- Making use of the Remote Manipulator System (RMS) astronauts Mark C. Lee (left), STS-82 payload commander, and Steven L. Smith, mission specialist, perform the final phases of Extravehicular Activity (EVA) duty. Lee holds a patch piece for Bay #10, out of view, toward which the two were headed. A sample of the patch work can be seen on Bay #9 in the upper left quadrant of the picture. This view was taken with an Electronic Still Camera (ESC).

S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS061-86-030 (4 Dec 1993) --- The Hubble Space Telescope (HST) is pictured in the Space Shuttle Endeavour's cargo bay following its capture and berthing early in the eleven-day STS-61 mission. The Remote Manipulator System (RMS) arm, with television cameras mounted on it, was maneuvered from inside the cabin in order to survey HST. Five days of space walks followed, during which a variety of servicing tasks were performed by four crew members.

STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.
STS061-37-011 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman with Wide Field/Planetary Camera (WF/PC 1) during changeout operations. WF/PC-2 has already been installed in cavity (out of frame). Astronauts Hoffman and Story Musgrave are performing Extravehicular Activities (EVA) to repair the Hubble Space Telescope (HST).

51F-42-069 (29 July-6 Aug 1985) --- The solar optical universal polarimeter (SOUP) experiment is visible among the cluster of Spacelab 2 hardware in the cargo bay of the Earth-orbiting Space Shuttle Challenger, backdropped against a curtain of white clouds over ocean waters. Various components of the instrument positioning system (IPS) are conspicuous at the center of the frame. Now resting, the remote manipulator system (RMS) was used at various points during the mission with the plasma diagnostics package (PDP) and as a support service structure for television cameras covering various activities of the busy science-oriented Spacelab 2 mission.

STS061-77-094 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored to the end of the Remote Manipulator System (RMS) arm, prepares to stow the Wide Field\Planetary Camera (WF\PC I) for the Hubble Space Telescope (HST), during their extravehicular activity (EVA). Astronaut F. Story Musgrave, stationed at the stowage area at bottom of frame, assists. WF/PC II is in place on the HST.

S77-E-5053 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The Spacehab module can be seen in the foreground. The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.
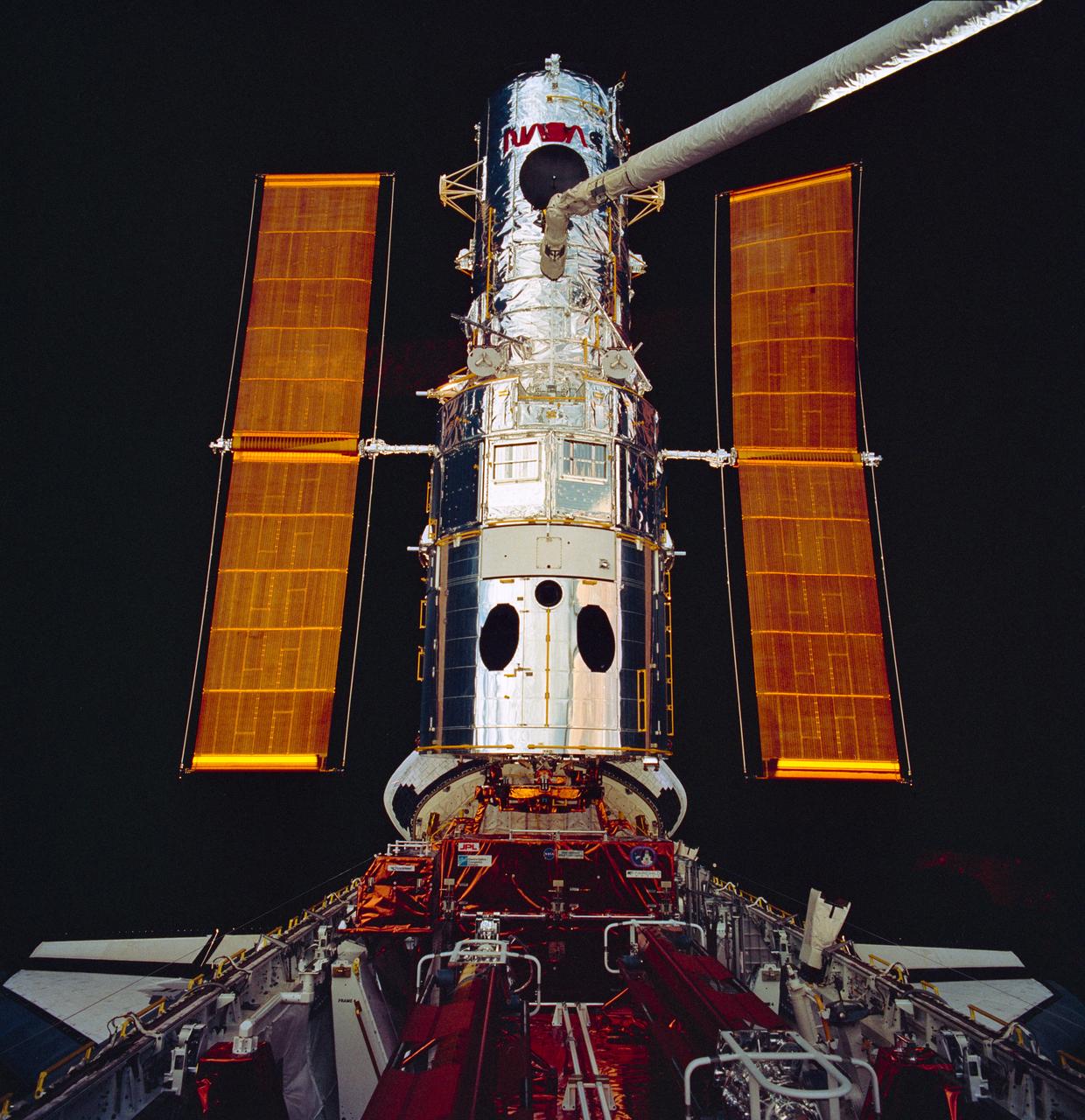
STS061-79-072 (4 Dec 1993) --- The Hubble Space Telescope (HST) is backdropped against the blackness of space in this 70mm frame recorded during a video survey of the spacecraft following the telescope's recent berthing in the Space Shuttle Endeavour's cargo bay. European Space Agency (ESA) scientist Claude Nicollier controlled the Remote Manipulator System (RMS) arm slowly so that mounted TV cameras could show flight controllers the various areas on the telescope.

STS061-79-087 (4 Dec. 1993) --- The Hubble Space Telescope (HST), backdropped over Madagascar, is berthed in the space shuttle Endeavour's cargo bay following its capture by the STS-61 astronauts. The crew used TV cameras to survey the spacecraft before sending out four astronauts on five separate sessions of extravehicular activity (EVA) to perform a variety of servicing tasks. Photo credit: NASA