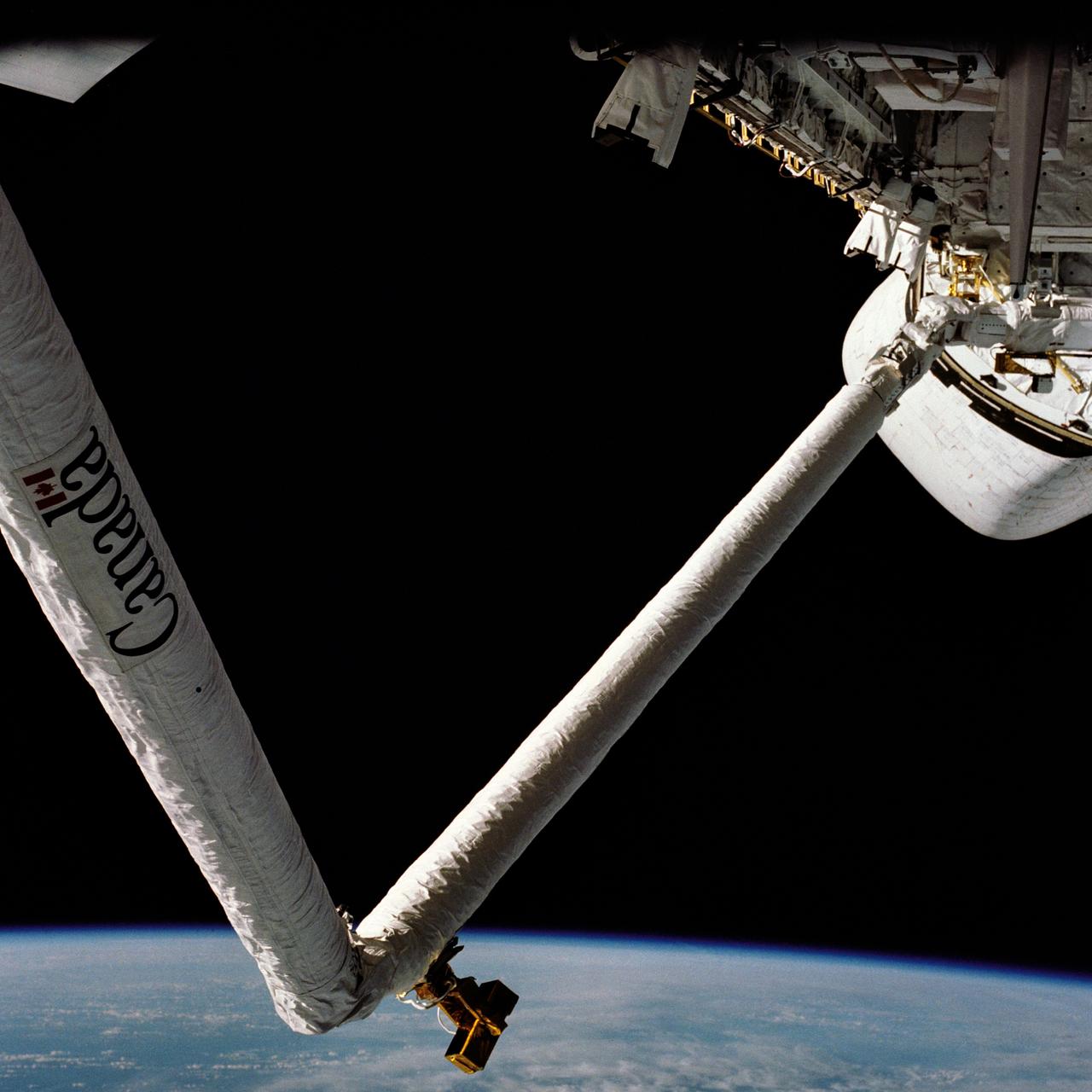
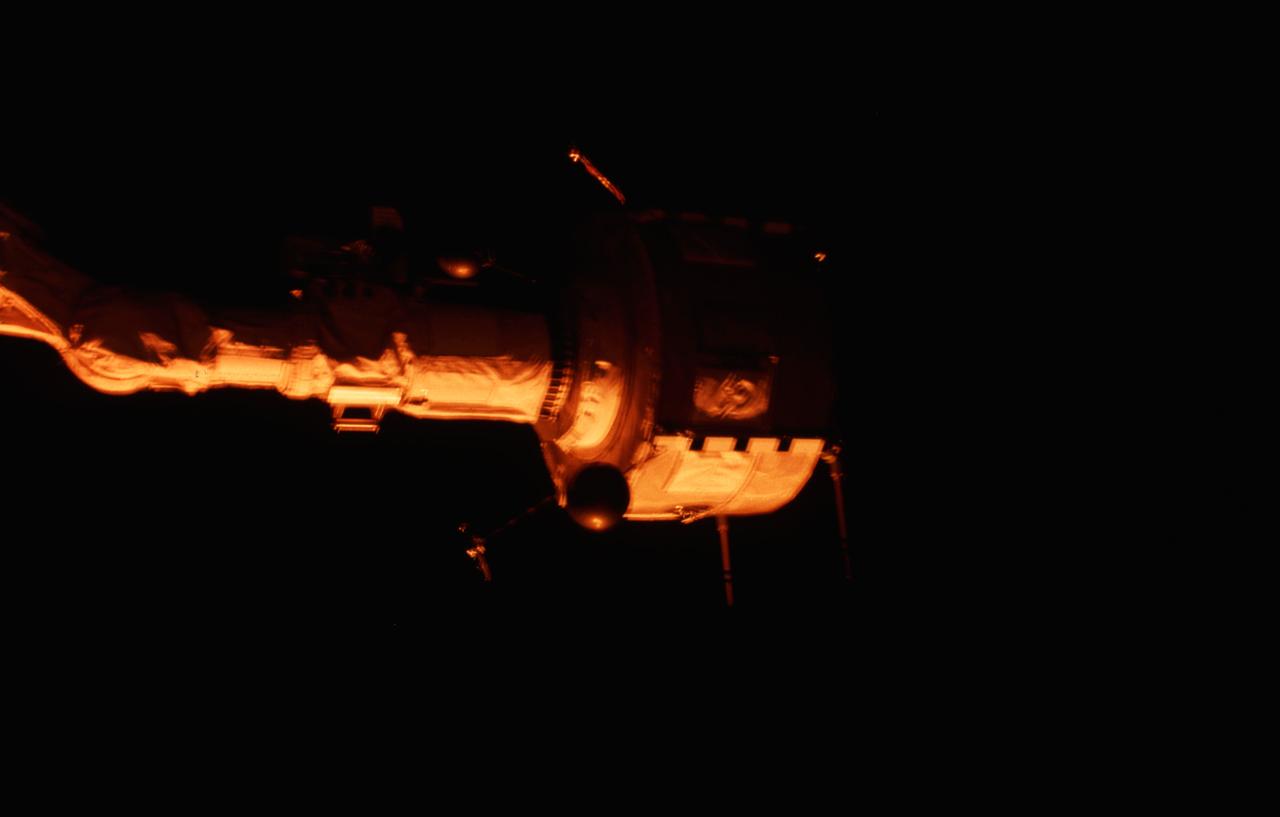
STS002-13-226 (13 Nov. 1981) --- Backdropped against Earth's horizon and the darkness of space, the space shuttle Columbia's remote manipulator system (RMS) gets its first workout in zero-gravity during the STS-2 mission. A television camera is mounted near the elbow and another is partially visible near the wrist of the RMS. Photo credit: NASA
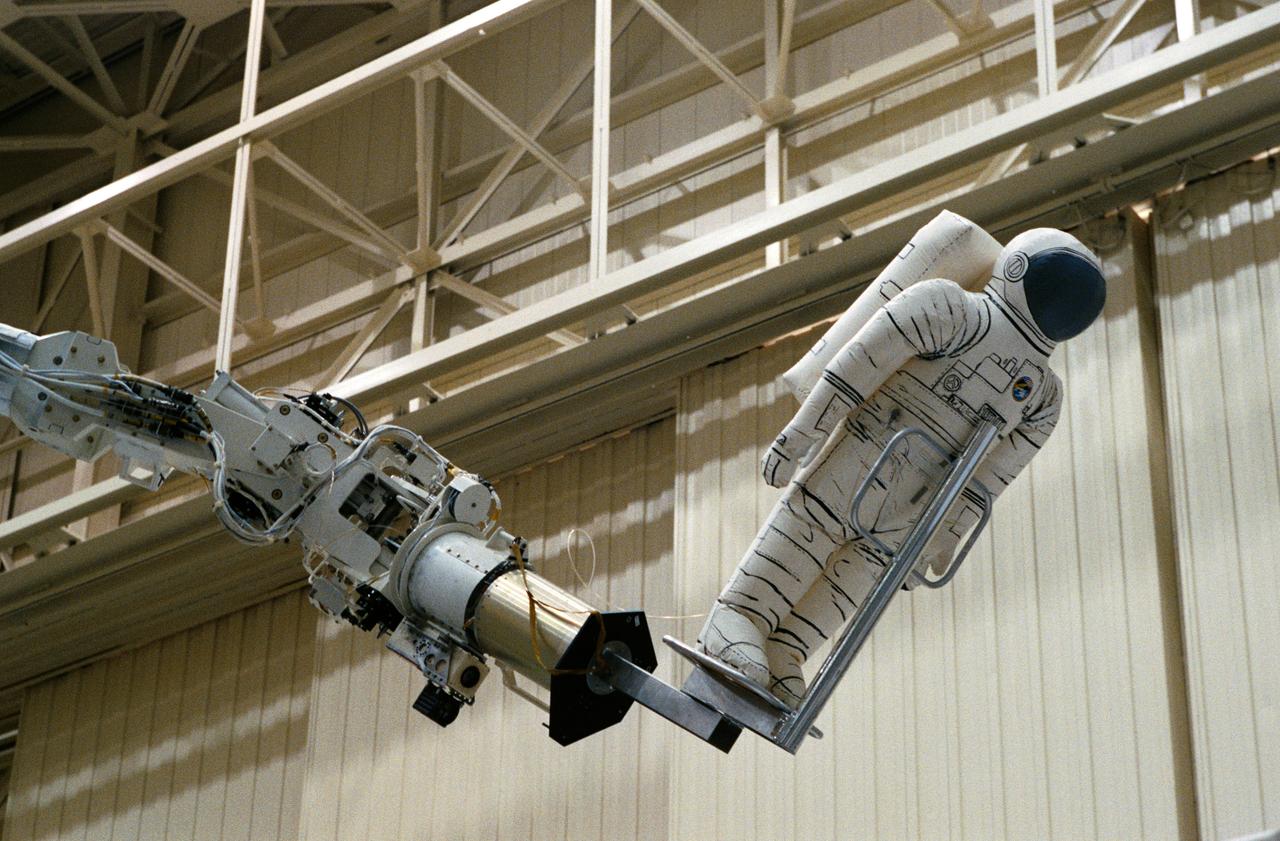
The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).
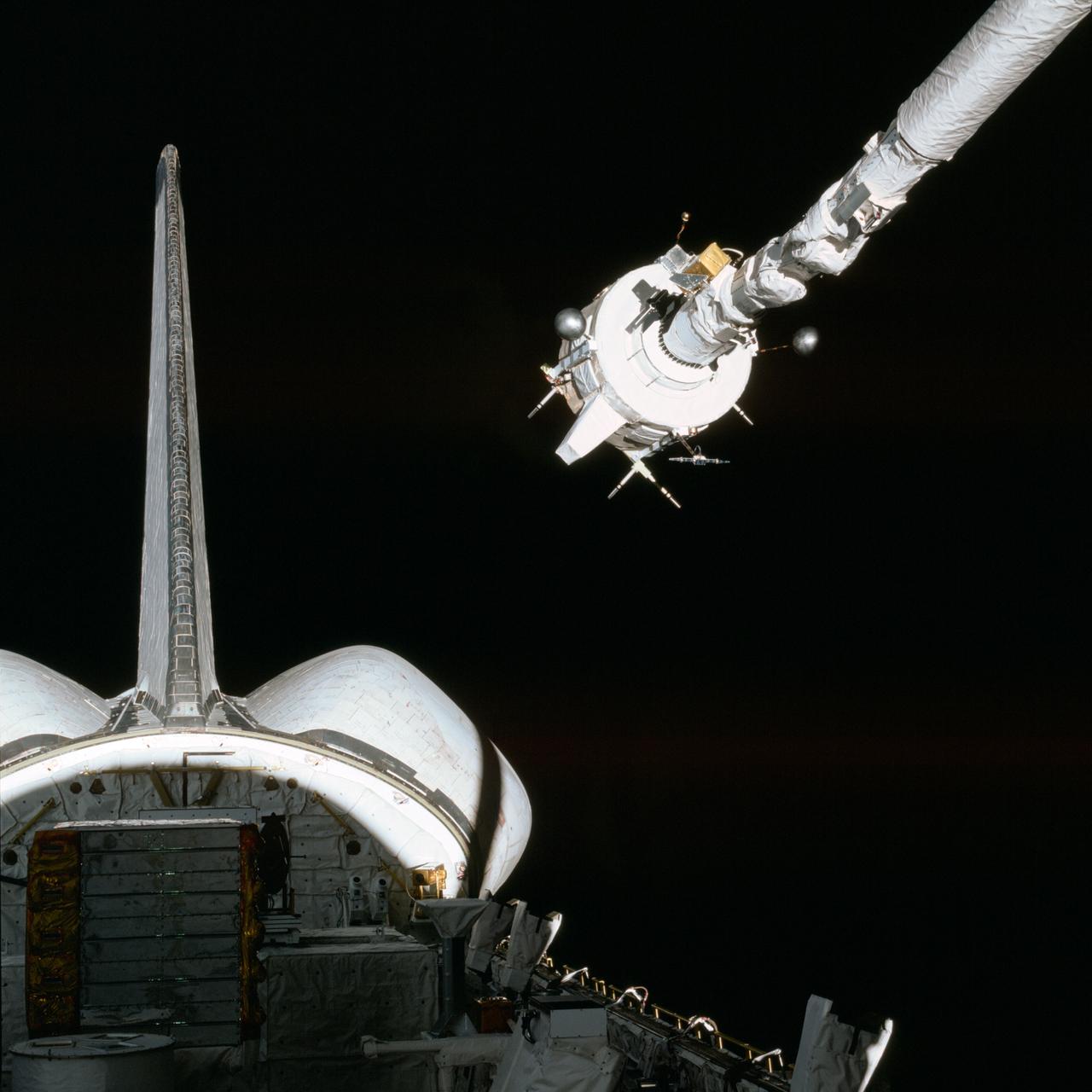
STS003-09-444 (22-30 March 1982) --- The darkness of space provides the backdrop for this scene of the plasma diagnostics package (PDR) experiment in the grasp of the end effector or ?hand? of the remote manipulator system (RMS) arm, and other components of the Office of Space Sciences (OSS-1) package in the aft section of the Columbia?s cargo hold. The PDP is a compact, comprehensive assembly of electromagnetic and particle sensors that will be used to study the interaction of the orbiter with its surrounding environment; to test the capabilities of the shuttle?s remote manipulator system; and to carry out experiments in conjunction with the fast pulse electron generator of the vehicle charging and potential experiment, another experiment on the OSS-1 payload pallet. This photograph was exposed with a 70mm handheld camera by the astronaut crew of STS-3, with a handheld camera aimed through the flight deck?s aft window. Photo credit: NASA
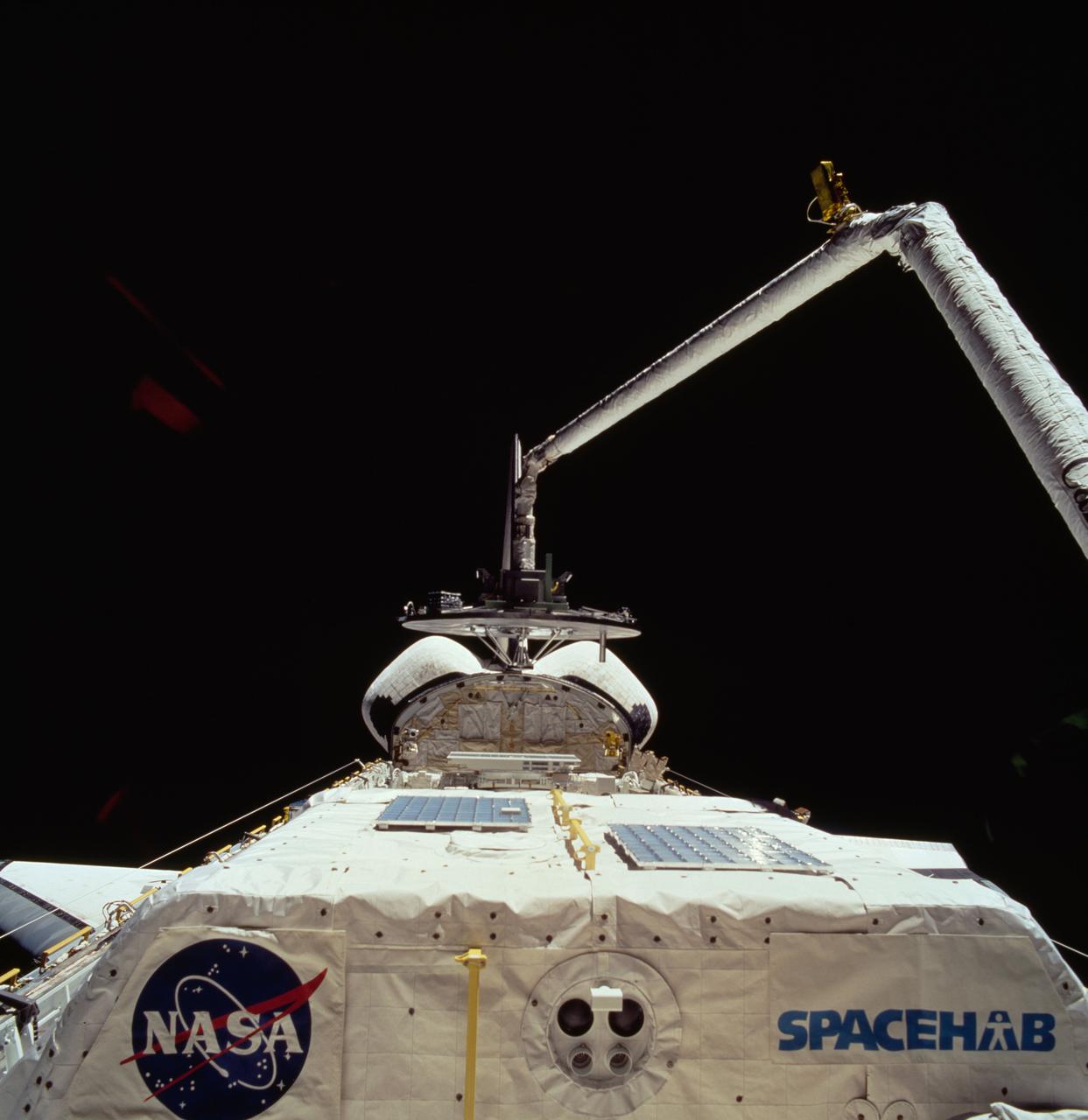
STS060-74-054 (3-11 Feb 1994) --- The Wake Shield Facility (WSF) is held in the grasp of Discovery's Remote Manipulator System (RMS). The 70mm image, backdropped against the blackness of space, also shows the SPACEHAB module in the forward cargo area.

In the Space Station Processing Facility, technicians work on the Japanese remote manipulator system. It is scheduled to fly on a 2008 mission along with the Kibo Japanese Experiment Module Pressurized Module (JEM-PM).

In the Space Station Processing Facility, technicians work on the Japanese remote manipulator system. It is scheduled to fly on a 2008 mission along with the Kibo Japanese Experiment Module Pressurized Module (JEM-PM).

This view taken through overhead window W7 on Columbia's, Orbiter Vehicle (OV) 102's, aft flight deck shows the Long Duration Exposure Facility (LDEF) in the grasp of the remote manipulator system (RMS) during STS-32 retrieval activities. Other cameras at eye level were documenting the bus-sized spacecraft at various angles as the RMS manipulated LDEF for a lengthy photo survey. The glaring celestial body in the upper left is the sun with the Earth's surface visible below.

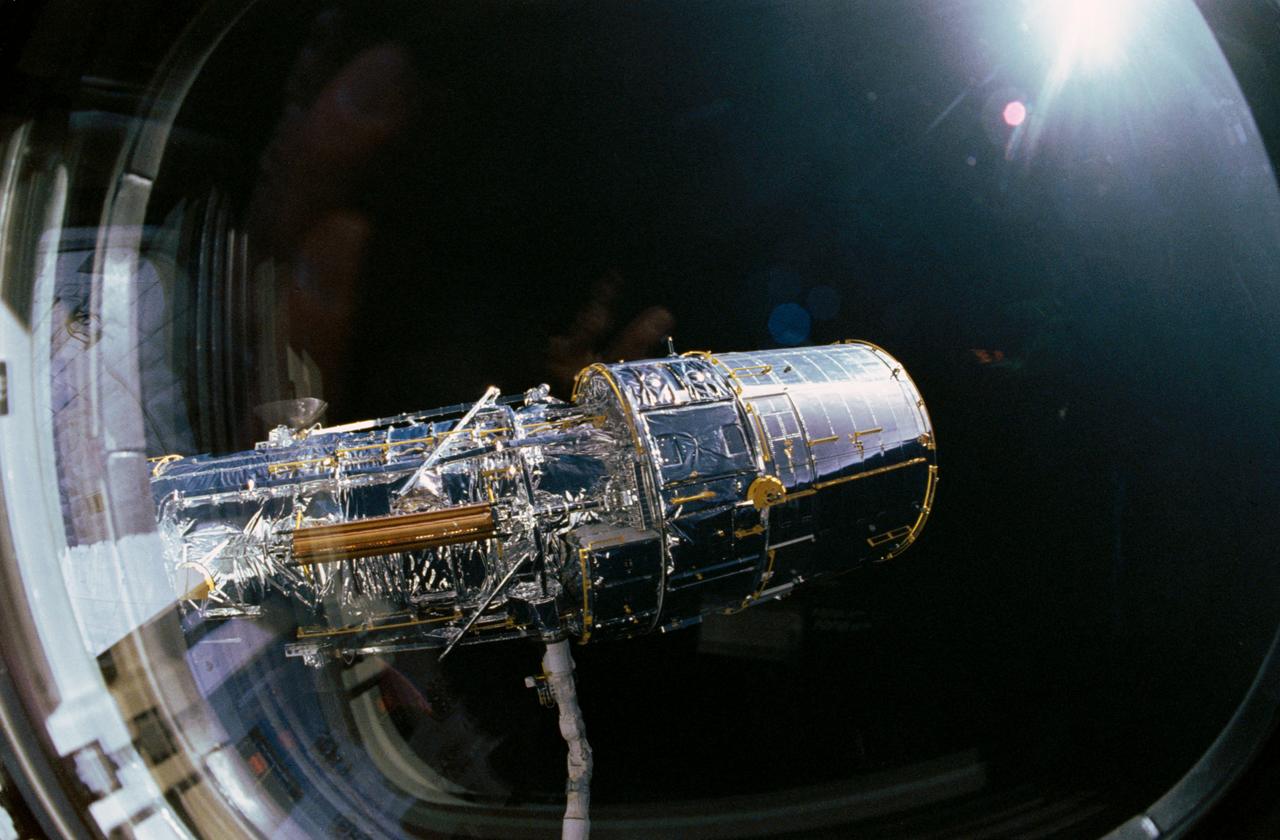
S82-E-5016 (12 Feb. 1997) --- Astronaut Steven A. Hawley, STS-82 mission specialist, controls Discovery's Remote Manipulation System (RMS), from the aft flight deck. Hawley and his crew mates are preparing for a scheduled Extravehicular Activity (EVA) with the Hubble Space Telescope (HST), which will be pulled into the Space Shuttle Discovery's cargo bay with the aid of the Remote Manipulator System (RMS). A series of EVA's will be required to properly service the giant telescope. Hawley served as a mission specialist on NASA's 1990 mission which was responsible for placing HST in Earth-orbit. This view was taken with an Electronic Still Camera (ESC).
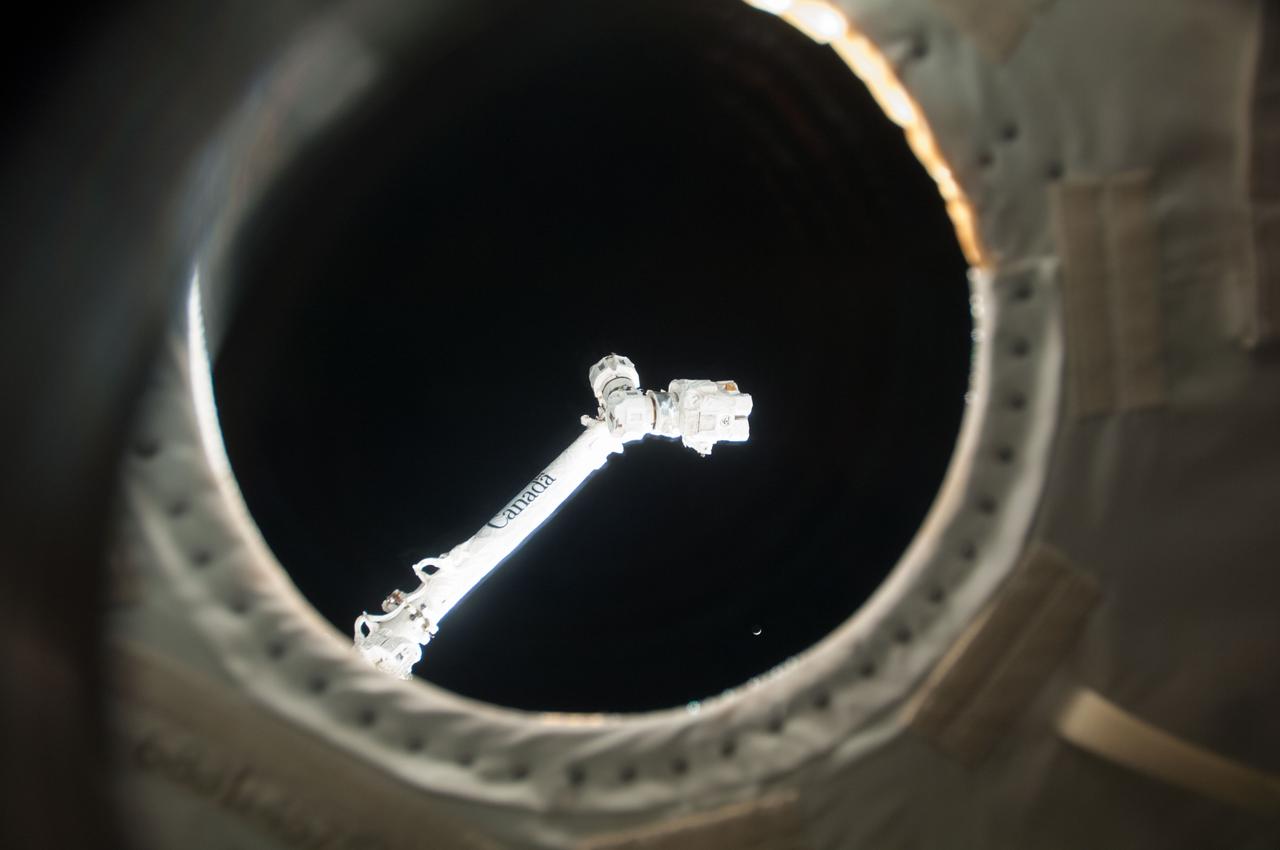
View of Space Station Remote Manipulator System (SSRMS). Photo was taken during Expedition 34.

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

Earth Observations taken by Expedition 38 crewmember. Remote Manipulator System (RMS) is visible. Image was released by astronaut on Twitter.

Night Earth Observations taken by Expedition 41 crewmember. Aurora and Remote Manipulator System (RMS) are visible.

ISS018-E-044145 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a communication system at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

ISS018-E-044131 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a computer at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

ISS018-E-044134 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a computer at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.
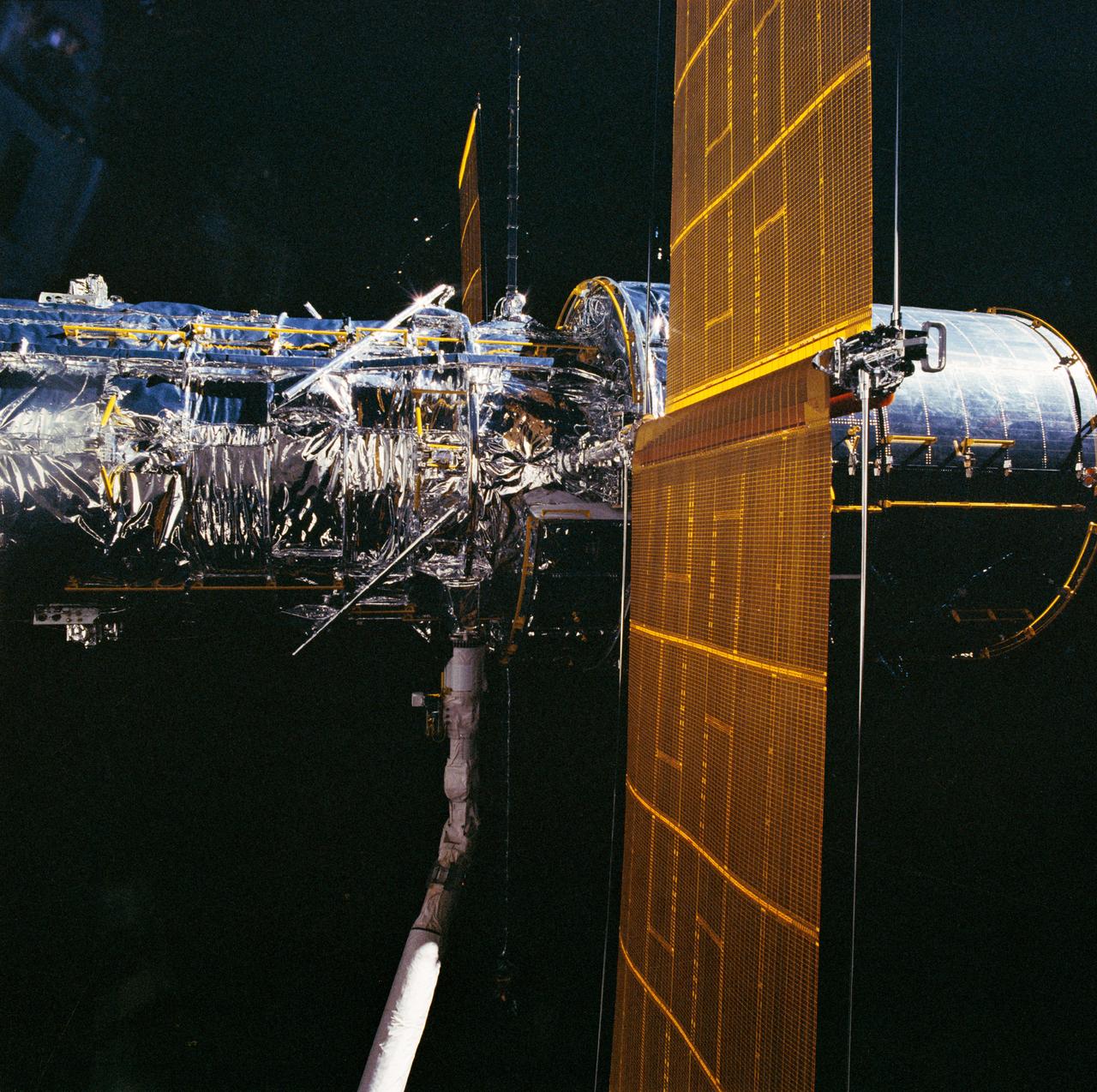
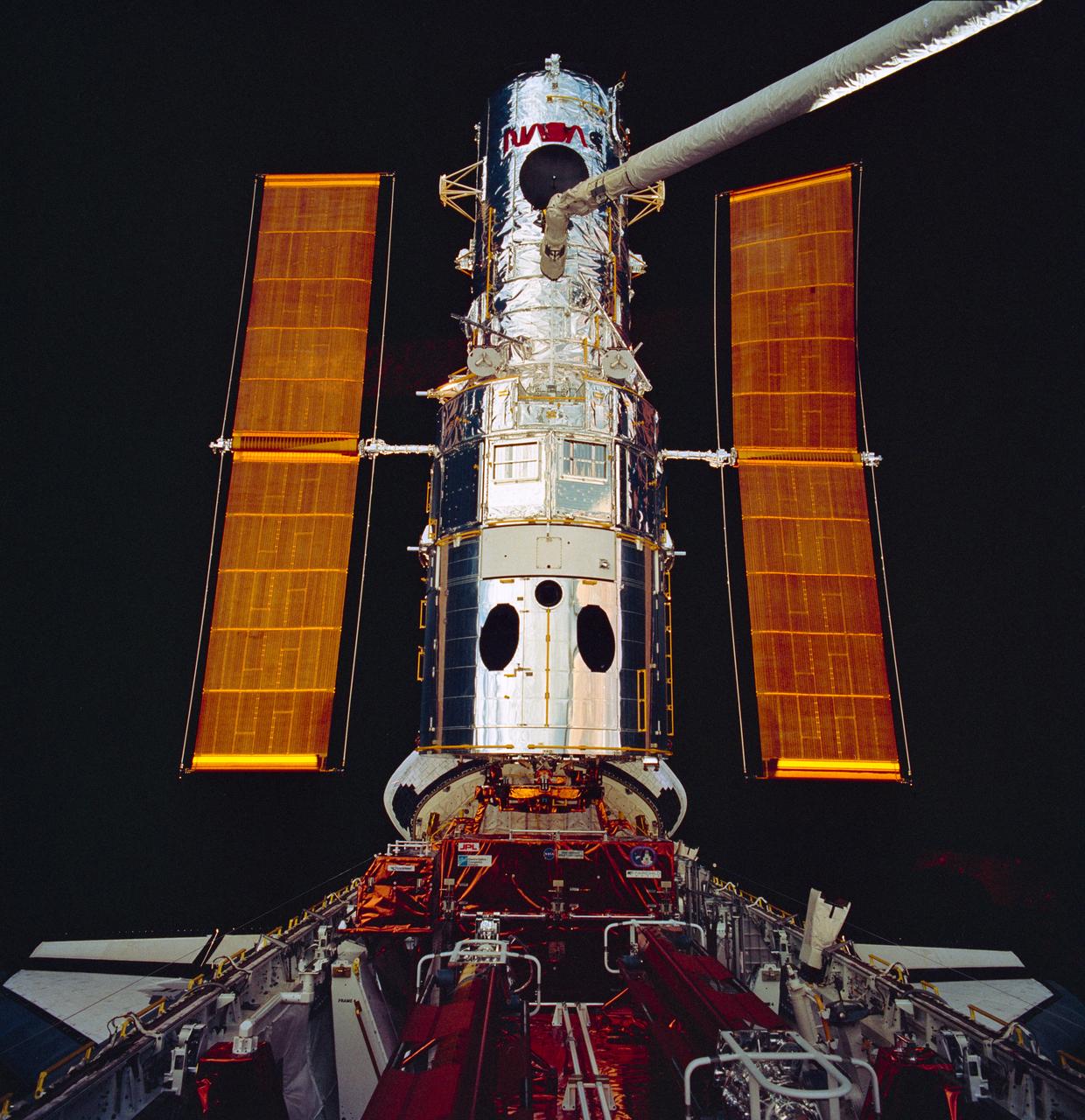
During STS-31 checkout, the Hubble Space Telescope (HST) is held in a pre-deployment position by Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS). The view, taken from the crew cabin overhead window W7, shows the starboard solar array (SA) panel (center) and two high gain antennae (HGA) (on either side) stowed along side the Support System Module (SSM) forward shell. The sun highlights HST against the blackness of space.
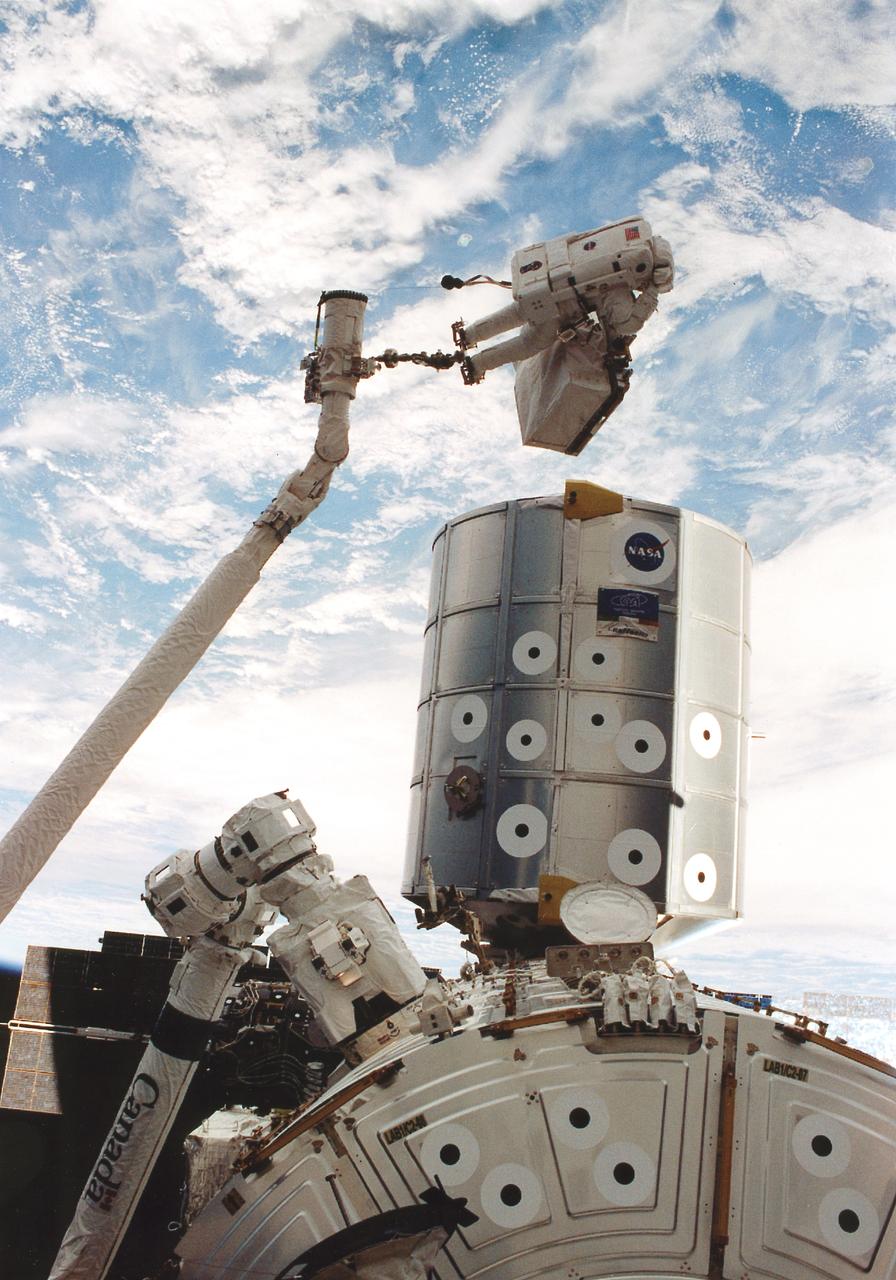
This is a Space Shuttle STS-100 mission onboard photograph. Astronaut Scott Parazynski totes a Direct Current Switching Unit while anchored on the end of the Canadian-built Remote Manipulator System (RMS) robotic arm. The RMS is in the process of moving Parazynski to the exterior of the Destiny laboratory (right foreground), where he will secure the spare unit, a critical part of the station's electrical system, to the stowage platform in case future crews will need it. Also in the photograph are the Italian-built Raffaello multipurpose Logistics Module (center) and the new Canadarm2 (lower right) or Space Station Remote Manipulator System.

The International Space Stations Remote Manipulator System (SSRMS) arm or Canadarm2 prepares to release the Orbital Sciences Cygnus commercial craft after three weeks at the space station.

Cosmonaut Sergei Krikalev, STS-60 mission specialist, practices operating the Shuttle's Remote Manipulator System (RMS) during a training exercise at JSC's Shuttle mockup and integration laboratory.
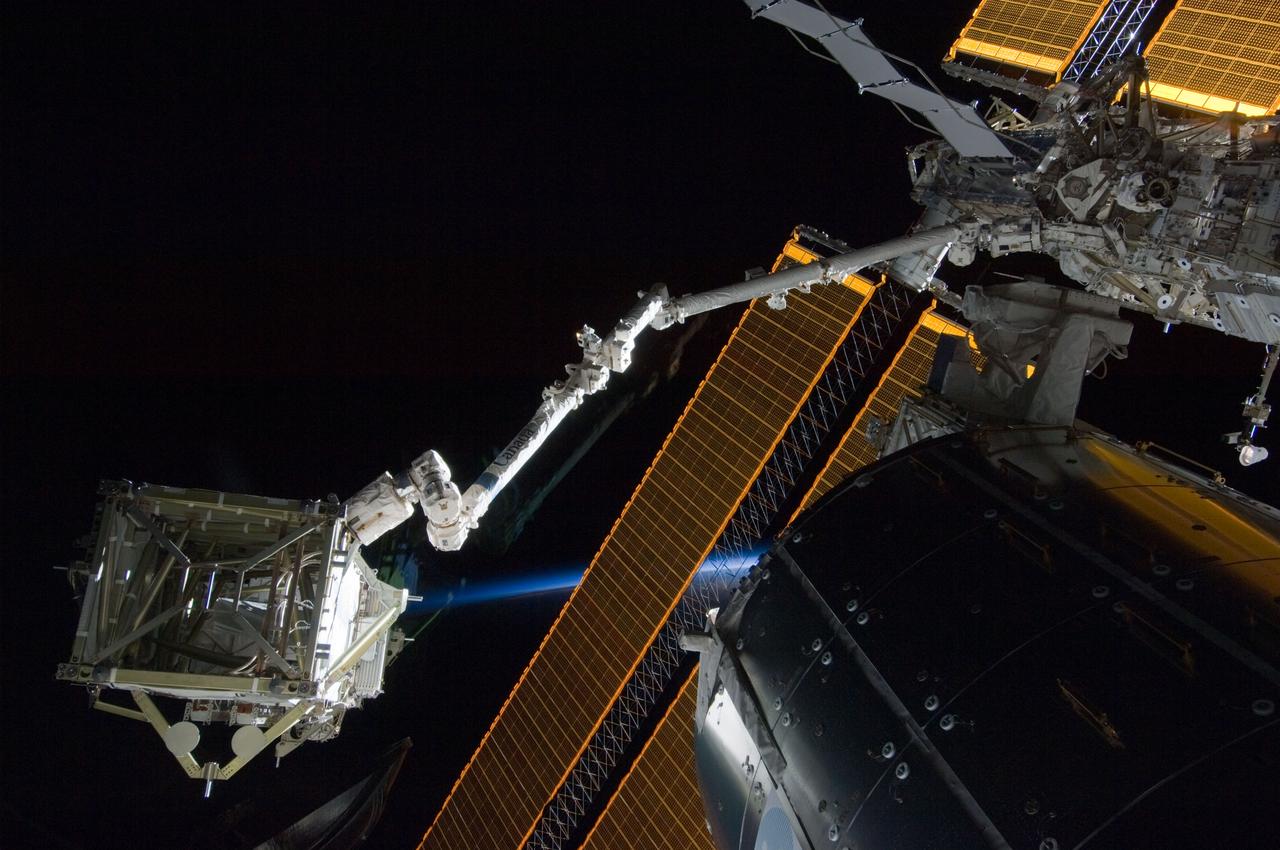
S119-E-006588 (18 March 2009) --- In the grasp of the International Space Station’s robotic Canadarm2, the S6 truss segment was photographed by a STS-119 crewmember while Space Shuttle Discovery is docked with the station. The S6 truss segment was moved from Discovery’s cargo bay by the station’s Canadarm2, handed off to the shuttle’s remote manipulator system (RMS), and then handed back to the station’s robotic arm where it will remain in an overnight parked position. Also visible in the image are the Columbus laboratory, starboard truss and solar array panels.
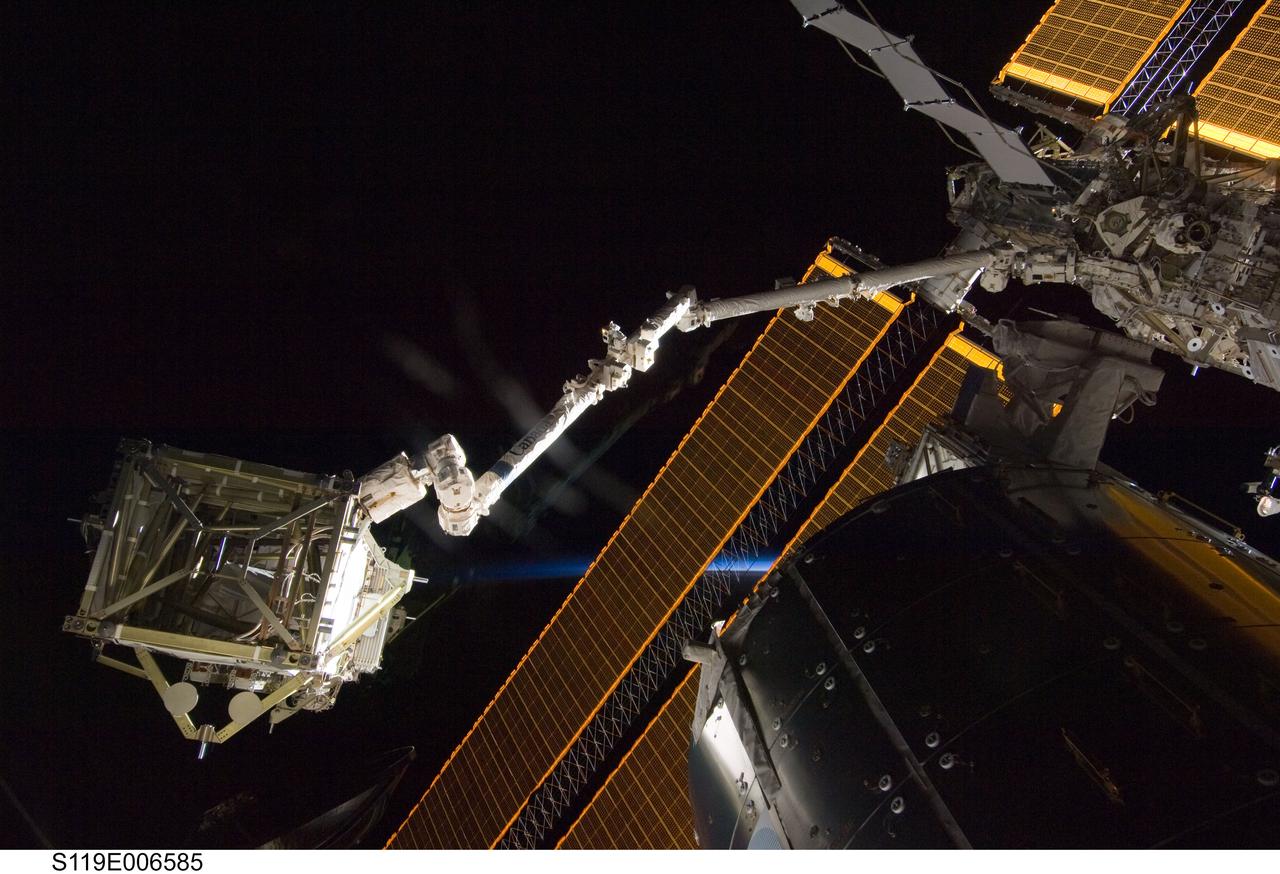
S119-E-006585 (18 March 2009) --- In the grasp of the International Space Station’s robotic Canadarm2, the S6 truss segment was photographed by a STS-119 crewmember while Space Shuttle Discovery is docked with the station. The S6 truss segment was moved from Discovery’s cargo bay by the station’s Canadarm2, handed off to the shuttle’s remote manipulator system (RMS), and then handed back to the station’s robotic arm where it will remain in an overnight parked position. Also visible in the image are the Columbus laboratory, starboard truss and solar array panels.

S119-E-006596 (18 March 2009) --- In the grasp of the International Space Station’s robotic Canadarm2, the S6 truss segment was photographed by a STS-119 crewmember while Space Shuttle Discovery is docked with the station. The S6 truss segment was moved from Discovery’s cargo bay by the station’s Canadarm2, handed off to the shuttle’s remote manipulator system (RMS), and then handed back to the station’s robotic arm where it will remain in an overnight parked position. Also visible in the image are the Columbus laboratory, starboard truss and solar array panels.

STS039-19-015 (28 April- 6 May 1991) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) on the end of the remote manipulator system (RMS) end effector. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS.

S119-E-006589 (18 March 2009) --- In the grasp of the International Space Station’s robotic Canadarm2, the S6 truss segment was photographed by a STS-119 crewmember while Space Shuttle Discovery is docked with the station. The S6 truss segment was moved from Discovery’s cargo bay by the station’s Canadarm2, handed off to the shuttle’s remote manipulator system (RMS), and then handed back to the station’s robotic arm where it will remain in an overnight parked position. Also visible in the image are the Columbus laboratory, starboard truss and solar array panels.
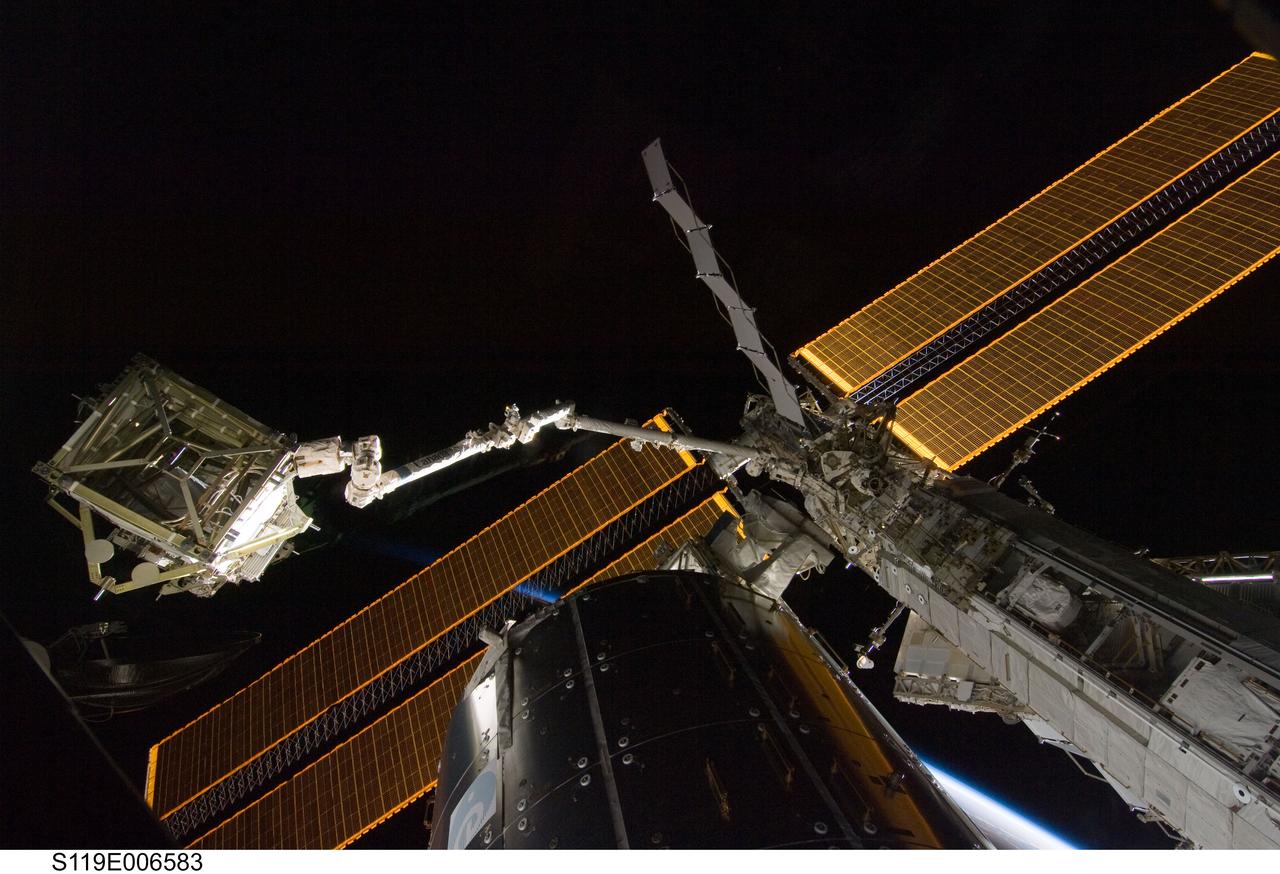
S119-E-006583 (18 March 2009) --- In the grasp of the International Space Station’s robotic Canadarm2, the S6 truss segment was photographed by a STS-119 crewmember while Space Shuttle Discovery is docked with the station. The S6 truss segment was moved from Discovery’s cargo bay by the station’s Canadarm2, handed off to the shuttle’s remote manipulator system (RMS), and then handed back to the station’s robotic arm where it will remain in an overnight parked position. Also visible in the image are the Columbus laboratory, starboard truss and solar array panels.
Swiss scientits Claude Nicollier (left), STS-61 mission specialist, waits his turn at the controls for the remote manipulator system (RMS) during a training session in the Neutral Buoyancy Simulator at Marshall Space Flight Center (MSFC). Mark Norman of MSFC has control of the RMS in this frame.

View of Space Station Remote Manipulator System (SSRMS) extended arm with a dark,cloudy Earth in the background. Photo was taken by an Expedition 36 crew member on board the International Space Station (ISS). Per Twitter message: #CanadaArm2 poised and ready to support capture of #HTV4 in just a couple weeks.

STS061-105-024 (2-13 Dec. 1993) --- One of Endeavour's space walkers captured this view of Endeavour backdropped against the blackness of space, with the Sun displaying a rayed effect. The extended Remote Manipulator System (RMS) arm that the astronaut was standing on is seen on the left side of the view.

STS060-57-033 (3-11 Feb 1994) --- Astronaut Ronald M. Sega suspends himself in the weightlessness aboard the Space Shuttle Discovery's crew cabin, as the Remote Manipulator System (RMS) arm holds the Wake Shield Facility (WSF) aloft. The mission specialist is co-principal investigator on the WSF project.

51D-07-003 (12-19 April 1985) --- Astronaut Rhea Seddon begins early work on a fly swatter-like snagging device to be used as an extension to the Remote Manipulator System (RMS) arm on Discovery for an April 17, 1985 attempt to trip a lever on the troubled Syncom-IV satellite.

ISS017-E-013970 (22 Aug. 2008) --- Astronaut Greg Chamitoff, Expedition 17 flight engineer, conducts a function checkout for the Japanese Experiment Module's Remote Manipulator System in the Kibo laboratory on the International Space Station.
View of the Space Station Remote Manipulator System (SSRMS) on the Mobile Transporter (MT) for S6 Relocation OPS during STS-119 / Expedition 18 joint docked OPS. The MT is on the S1 Truss segment.

View of the SIR-B antenna being deployed during STS 41-G. The Challenger's payload bay is open and the remote manipulator system (RMS) arm is in the stowed position at the right of the view.

Spartan I satellte sits in the Discovery's payload bay prior to being deployed. Above it can be seen the remote manipulator system (RMS) arm and end effector. The Earth's horizon can also be seen above the orbiter.

ISS018-E-019920 (19 Jan. 2009) --- Astronaut Sandra Magnus, Expedition 18 flight engineer, uses a communication system while performing a function test of the Japanese Remote Manipulator System (JEM-RMS) in the Kibo laboratory of the International Space Station.

ISS018-E-019933 (19 Jan. 2009) --- Astronaut Sandra Magnus, Expedition 18 flight engineer, uses a communication system while performing a function test of the Japanese Remote Manipulator System (JEM-RMS) in the Kibo laboratory of the International Space Station.
STS003-21-080 (22-30 March 1982) --- Plasma Diagnostics Package (PDP) grappled by remote manipulator system (RMS) end effector is positioned above payload bay (PLB) at sunrise. Photo credit: NASA

Clouds over the Atlantic Ocean serve as the backdrop for this 70mm scene of the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere (CRISTA), attached to the Shuttle Pallet System (SPAS). CRISTA-SPAS was in the grasp of the Space Shuttle Atlantis Remote Manipulator System (RMS) arm. The crew deployed the Crista-SPAS on November 4, 1994 and the tandem remained in free-flight until November 12, 1994 when it was retrieved by the Canadian-built RMS, controlled by payload commander Ellen Ochoa.
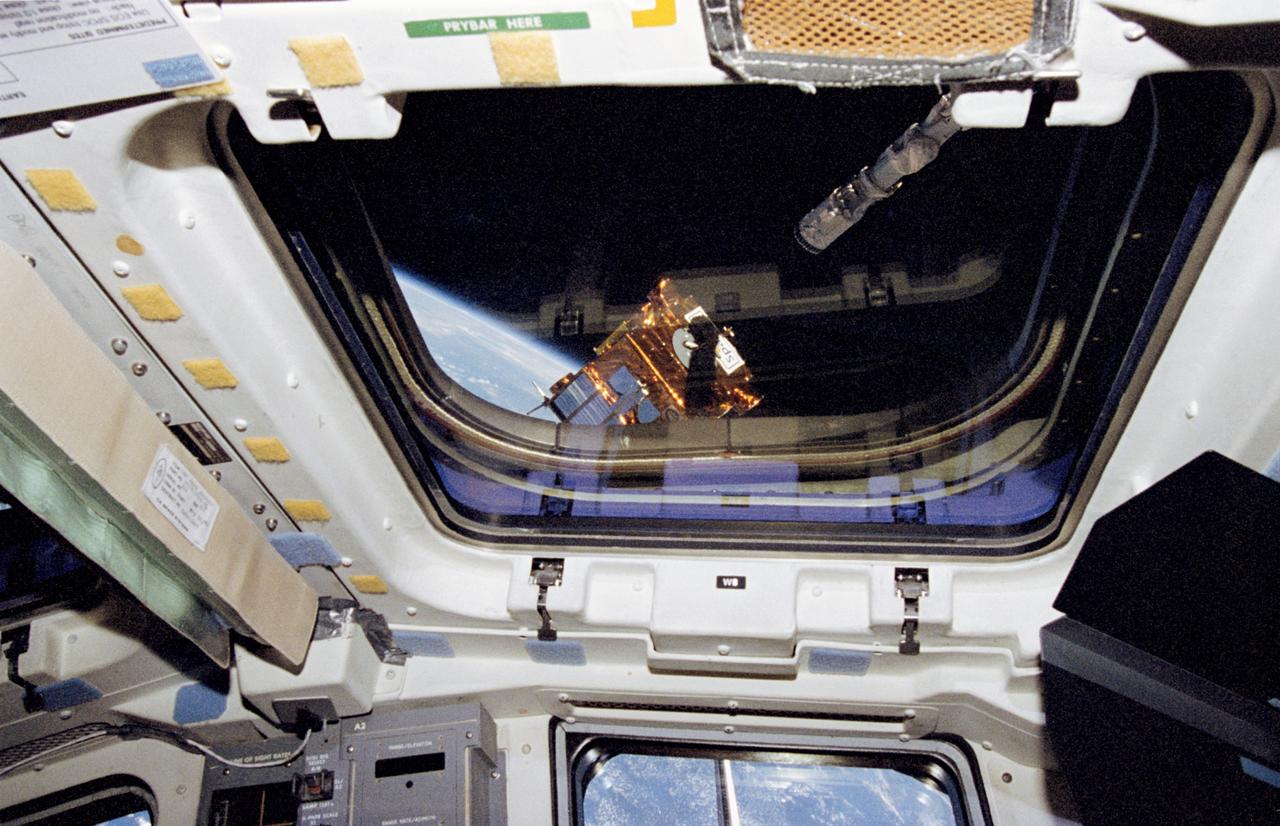
STS072-320-014 (17 Jan. 1996) --- The end effect of the Space Shuttle Endeavour's Remote Manipulator System (RMS) is about to grapple the Office of Aeronautics and Space Technology's (OAST) -- Flyer satellite. The view was recorded with a 35mm camera aimed through one of Endeavour's overheard windows on the aft flight deck.

ISS018-E-044184 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a computer at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

STS002-12-833 (13 Nov. 1981) --- Clouds over Earth and black sky form the background for this unique photograph from the space shuttle Columbia in Earth orbit. The photograph was shot through the aft flight deck windows viewing the cargo bay. Part of the scientific payload of the Office of Space and Terrestrial Applications (OSTA-1) is visible in the open cargo bay. The astronauts inside Columbia's cabin were remotely operating the Canadian-built remote manipulator system (RMS). Note television cameras on its elbow and wrist pieces. Photo credit: NASA

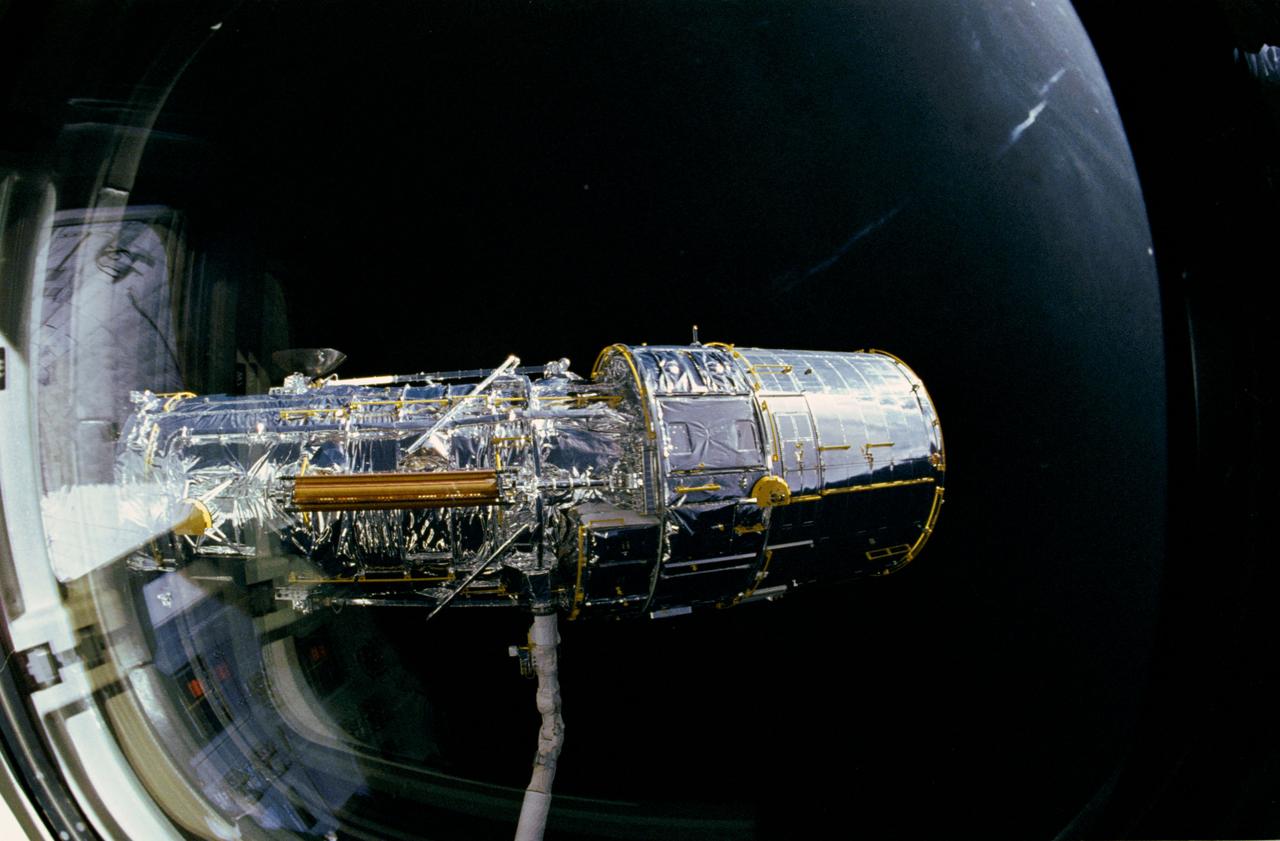
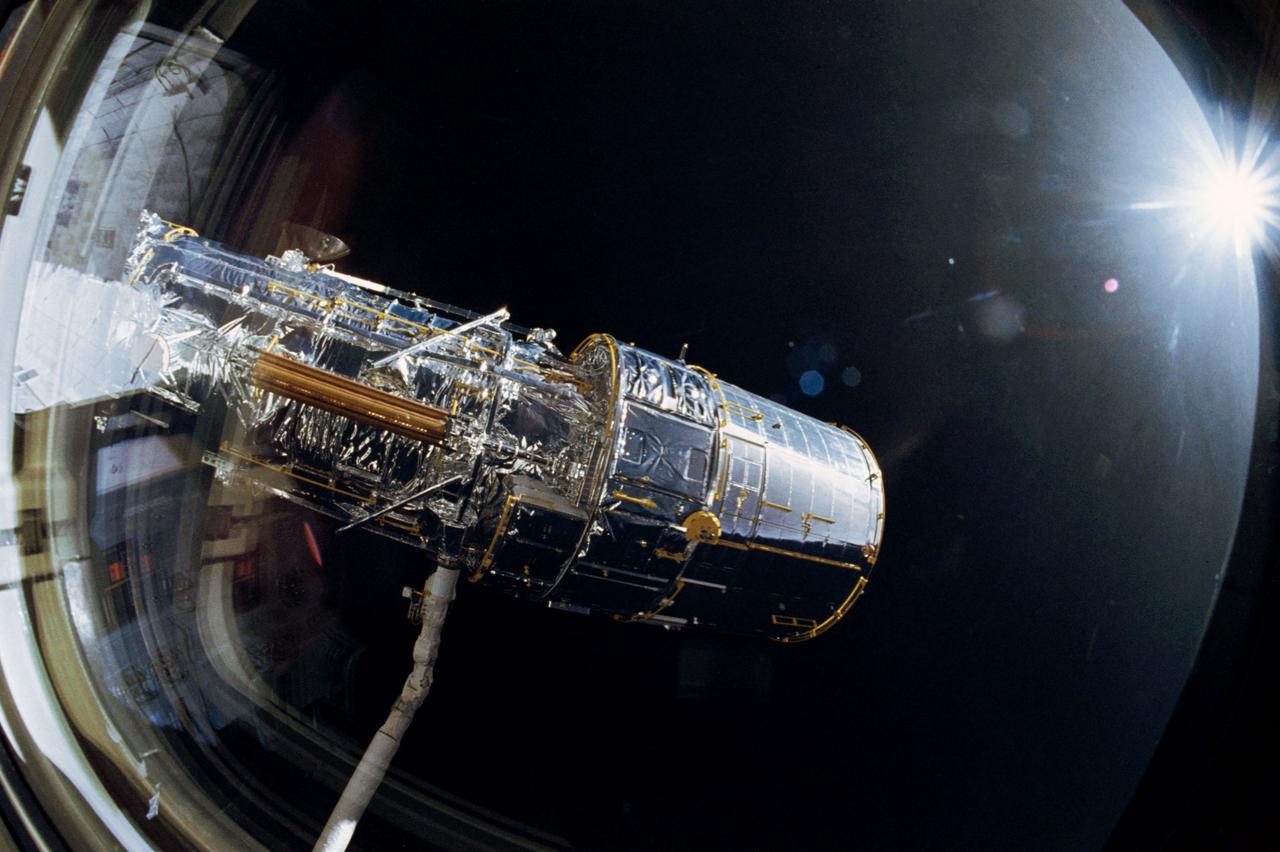
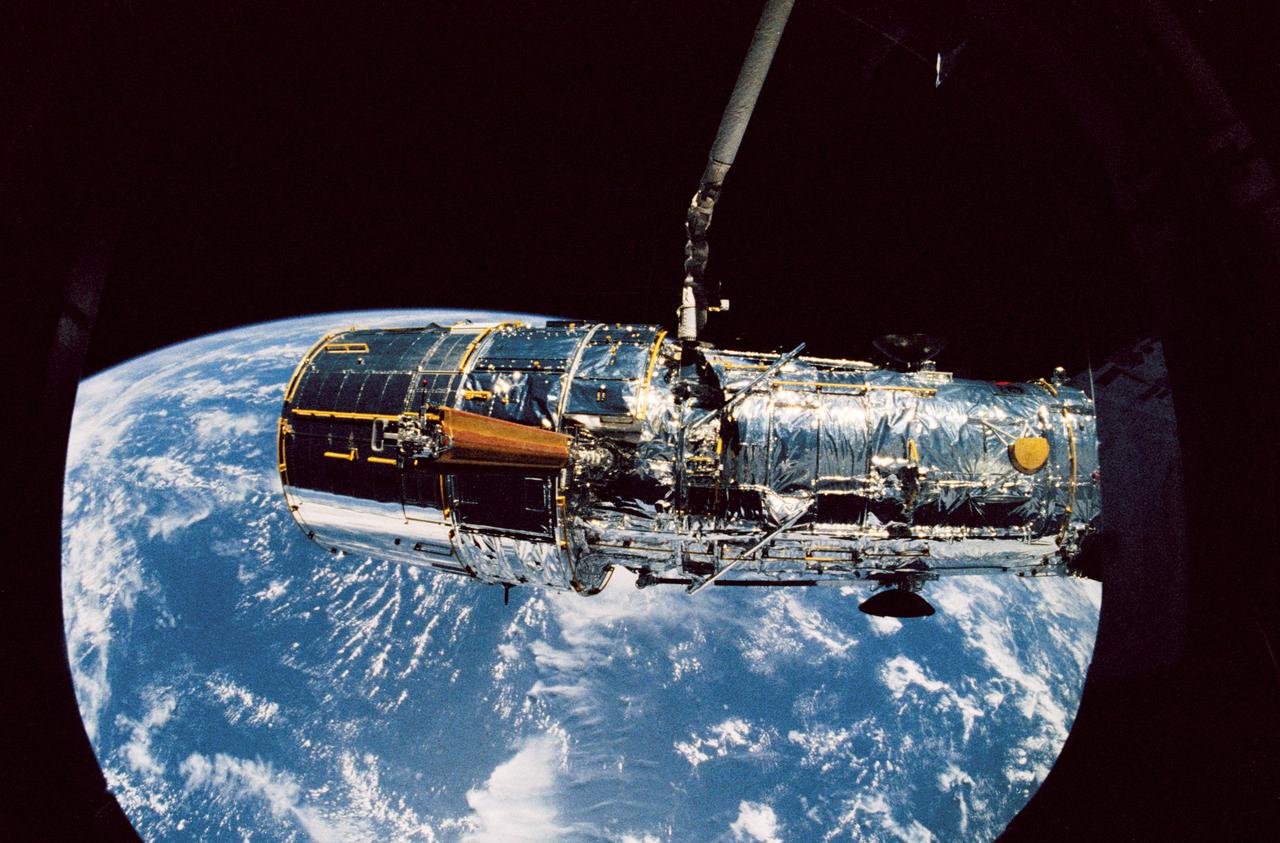
STS031-10-023 (25 April 1990) --- View of the Hubble Space Telescope (HST) on the end of Discovery's Remote Manipulator System (RMS) arm prior to deployment of its antennae and solar array panels.

STS061-23-037 (2-13 Dec 1993) --- ESA astronaut Claude Nicollier, mission specialist, is stationed on the Space Shuttle Endeavour's flight deck during one of the five Hubble Space Telescope (HST) servicing space walks. The controls for the Remote Manipulator System (RMS), which played an important role in the space walks, are left of frame center. Two space walkers can be seen through the aft windows.

STS066-13-014 (3-14 Nov. 1994) --- On the space shuttle Atlantis' aft flight deck, astronaut Ellen Ochoa, payload commander, has just completed an operation at the controls for the Remote Manipulator System (RMS) arm while working in chorus with astronaut Donald R. McMonagle. McMonagle, mission commander, is seen here at his station on the forward flight deck. An RMS operations checklist floats in front of Ochoa. Photo credit: NASA
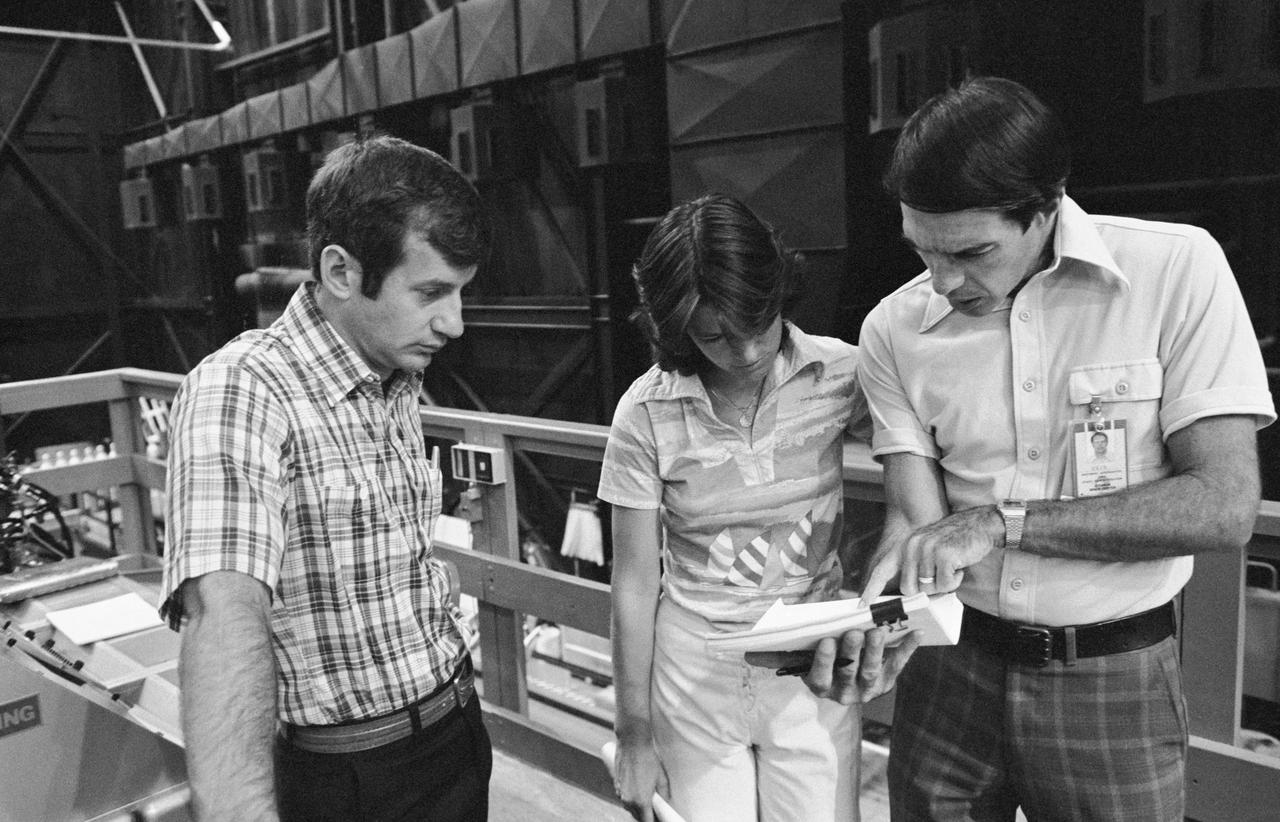
Astronauts Sally Ride and Terry Hart prepare for remote manipulator system (RMS) training for STS-2 in bldg 9A. Views include Ride, Hart and Robert R. Kain of the Flight Activites Branch reviewing procedures for RMS training (34262); Ride and Hart stand beside the RMS control center looking down at the payload bay mock-up (34263).

STS061-95-028 (6 Dec 1993) --- Astronaut Kathryn C. Thornton, on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST) during the second extravehicular activity (EVA) on the eleven-day mission. Astronauts Thornton and Thomas D. Akers changed out the solar array panels during this EVA.
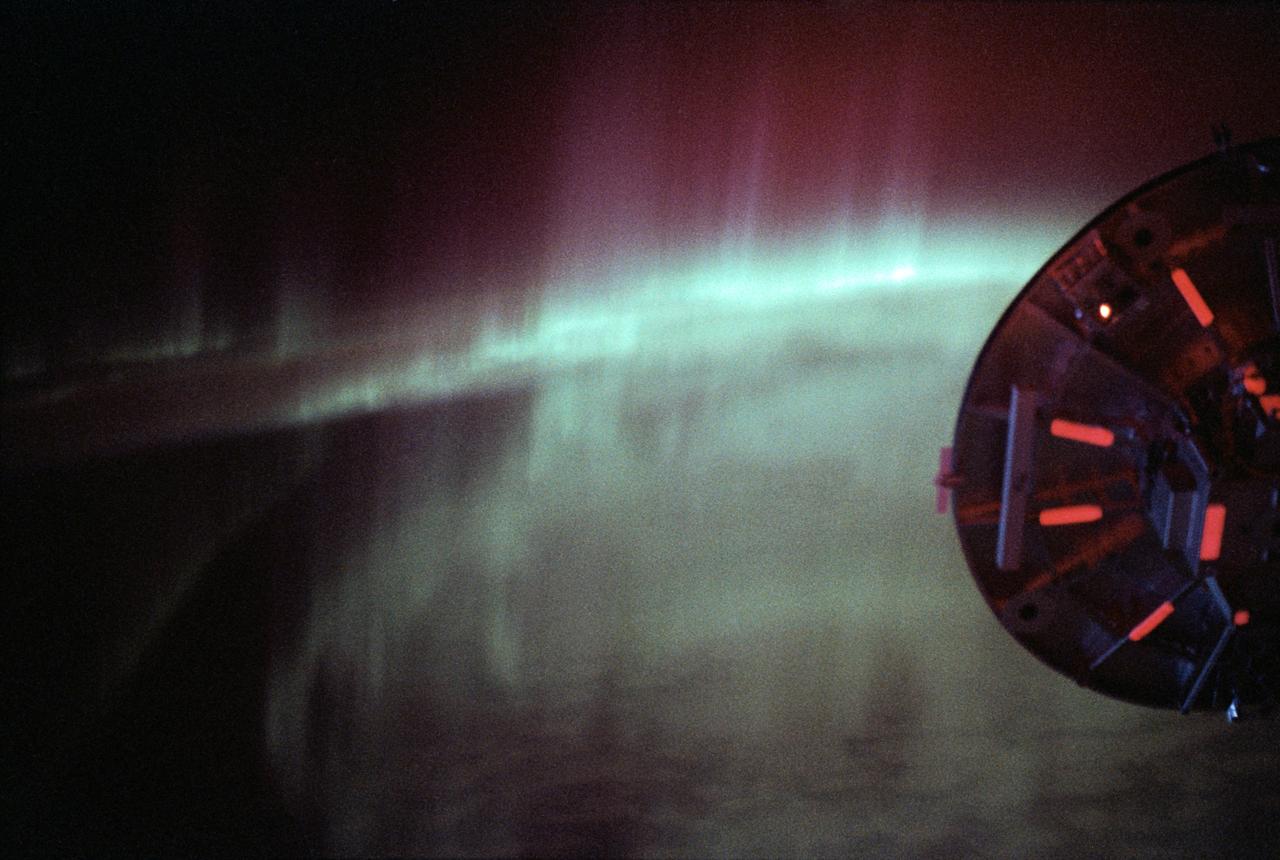
STS060-09-024 (3-11 Feb 1994) --- As the Space Shuttle Discovery flew over a point between New Zealand and Australia, one of the STS-60 crew members used a 35mm camera to capture this image featuring three-fourths of the disc of the Wake Shield Facility (WSF) back dropped against the Southern Lights. The WSF was in the grasp of the Remote Manipulator System (RMS) end effector (out of frame at right).

STS061-07-003 (4 Dec 1993) --- Swiss astronaut Claude Nicollier is pictured at the aft flight deck station he occupied during much of the time on NASA's STS-61 mission aboard the Space Shuttle Endeavour. Among Nicollier's responsibilities were the control of the Remote Manipulator System (RMS) during operations with the Hubble Space Telescope (HST).

STS064-76-035 (15 Sept. 1994) --- Backdropped against the darkness of space, the Shuttle Pointed Autonomous Research Tool for Astronomy 201 (SPARTAN-201) satellite is lined up with the space shuttle Discovery's Remote Manipulator System (RMS) arm for re-capture. The free-flying spacecraft had remained some 40 miles away from Discovery for over two days. Photo credit: NASA or National Aeronautics and Space Administration

STS060-76-095 (3-11 Feb 1994) --- The ram side of the Wake Shield Facility (WSF) in the grasp of the Space Shuttle Discovery's Remote Manipulator System (RMS) arm is featured in this 70mm frame. Clouds over the Atlantic Ocean and the blackness of space share the backdrop for the picture. Five NASA astronauts and a Russian cosmonaut spent eight days in Earth orbit in support of the STS-60 mission.
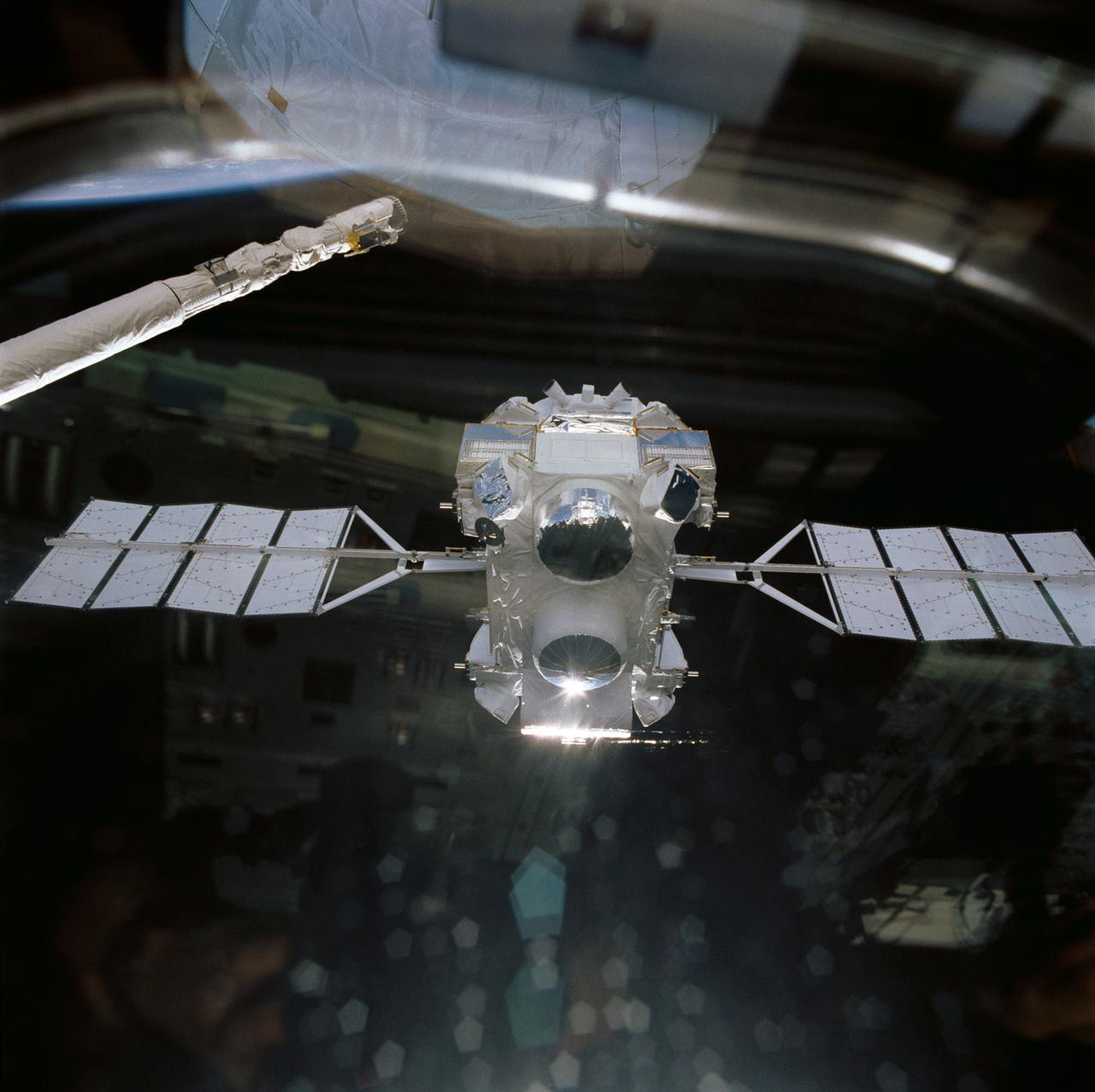
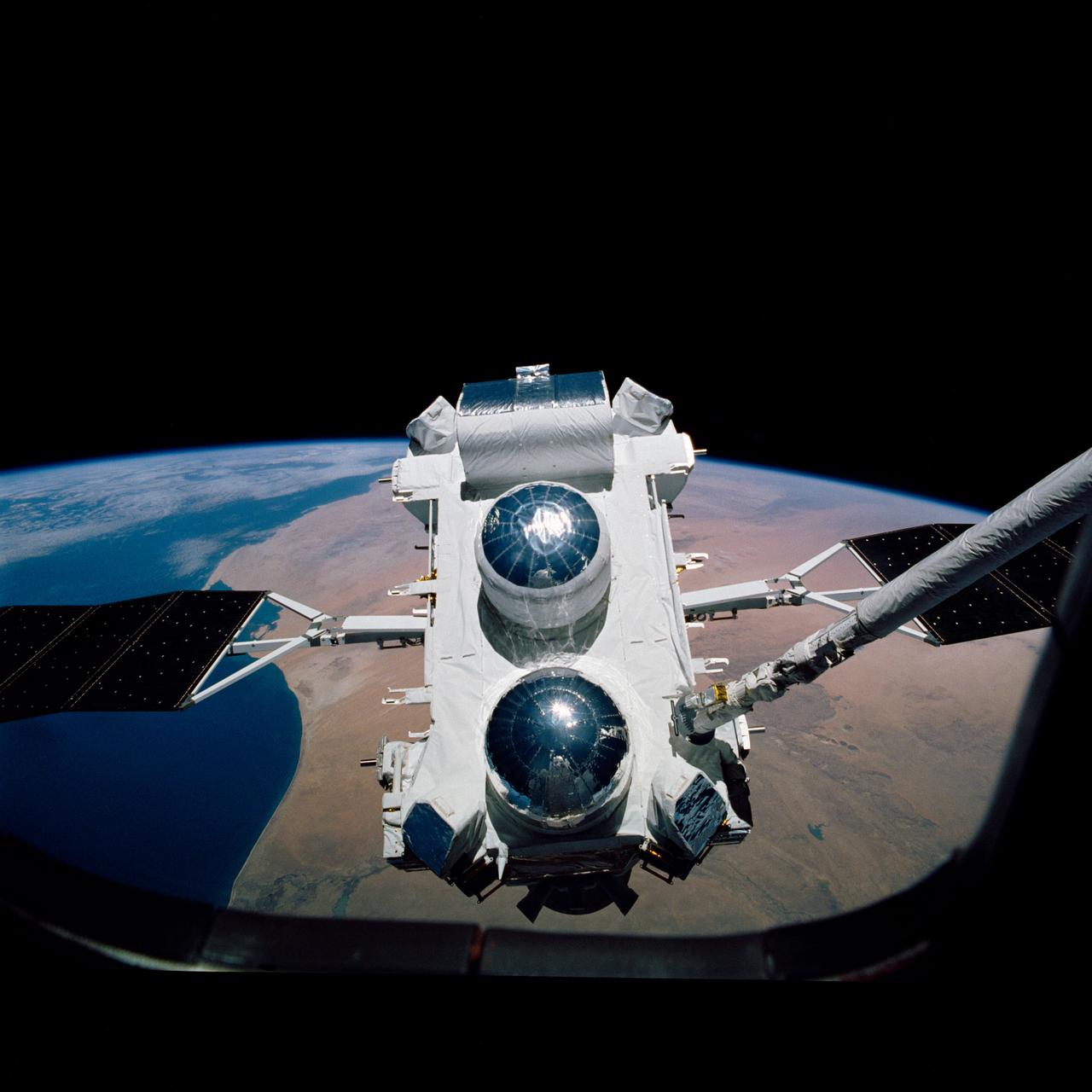
Atlantis', Orbiter Vehicle (OV) 104's, remote manipulator system (RMS) releases Gamma Ray Observatory (GRO) during STS-37 deployment. Visible on the GRO as it drifts away from the RMS end effector are the four complement instruments: the Energetic Gamma Ray Experiment (bottom); Imaging Compton Telescope (COMPTEL) (center); Oriented Scintillation Spectrometer Experiment (OSSE) (top); and Burst and Transient Source Experiment (BATSE) (at four corners). GRO's solar array (SA) panels are extended and are in orbit configuration. View was taken through aft flight deck window which reflects some of the crew compartment interior.

51I-44-081 (1 Sept 1985) --- Astronaut James D. van Hoften on the Discovery's remote manipulator system (RMS) arm visually tracks the distant Syncom IV-3 communications satellite after its second release, on Sept. 1, 1985.
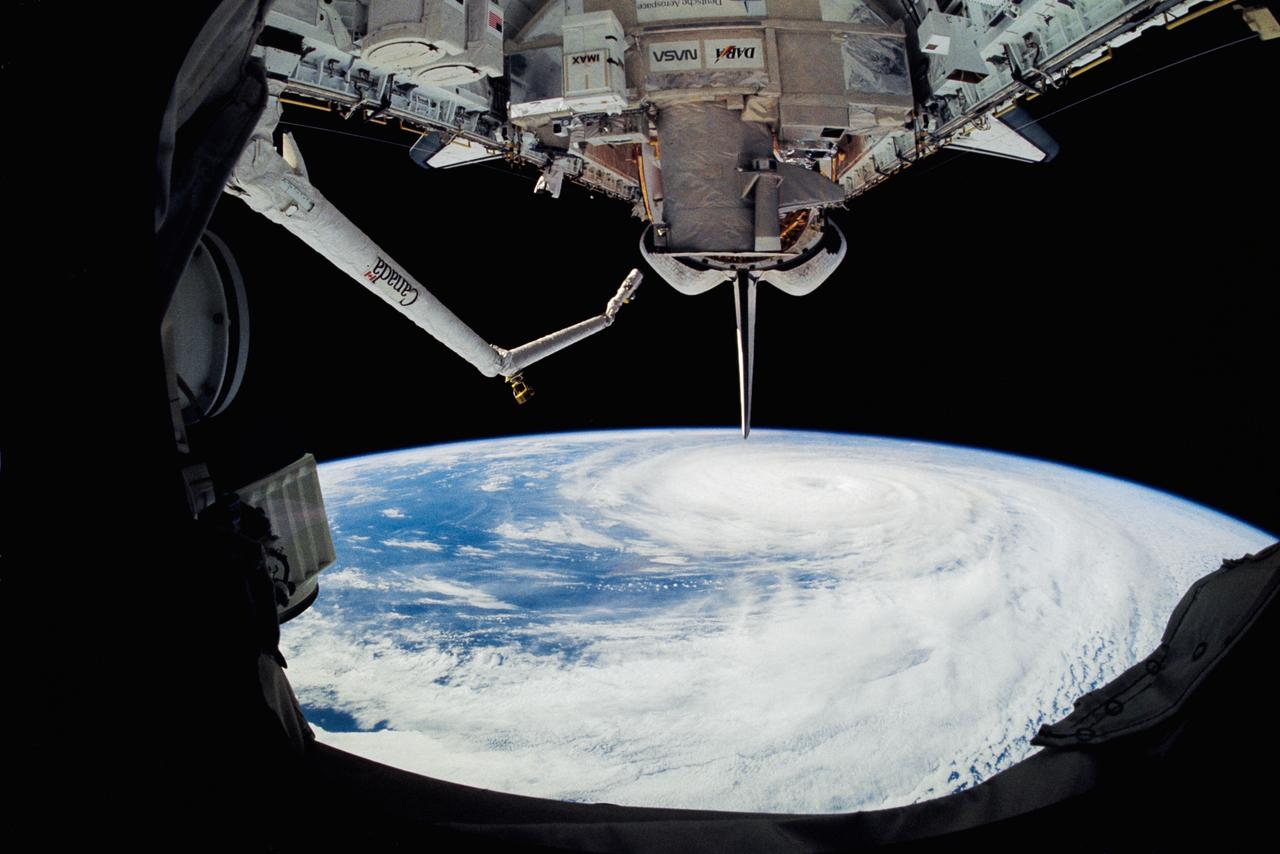
One of the STS-51 astronauts used a "fish-eye" lens on a 35mm cmaera to photograph this view of Hurricane Kenneth in the Pacific Ocean. The Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer/Shuttle Pallet Satellite (ORFEUS/SPAS) is still in the cargo bay. The Remote Manipulator System (RMS) is extended towards the open payload bay.
41G-03-008 (5-13 Oct. 1984) --- The end effector of the space shuttle Challenger's remote manipulator system (RMS) taps against the shuttle imaging radar's (SIR-B) antenna to secure it during NASA's 41-G mission. Photo credit: NASA

The Hubble Space Telescope (HST), grappled by Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS), is held in a pre-deployment position. During STS-31 checkout procedures, the solar array (SA) panels and the high gain antennae (HGA) will be deployed. The starboard SA (center) and the two HGA are stowed along side the Support System Module (SSM) forward shell. The sun highlights HST against the blackness of space.
The Hubble Space Telescope (HST), grappled by Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS), is oriented in a 90 degree pitch position during STS-31 pre-deployment checkout procedures. The solar array (SA) panel (center) and high gain antennae (HGA) (on either side) are stowed along the Support System Module (SSM) forward shell prior to deployment. The sun highlights HST against the blackness of space.
View taken through overhead window W7 aboard Discovery, Orbiter Vehicle (OV) 103, shows the Hubble Space Telescope (HST) grappled by the remote manipulator system (RMS) and held in a 90 degree pitch position against the blackness of space. The solar array (SA) panel (center) and the high gain antennae (HGA) (on either side) are visible along the Support System Module (SSM) forward shell prior to deployment during STS-31.

STS037-99-098 (7 April 1991) --- Backdropped against clouds over water, the Gamma Ray Observatory (GRO) is still in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) in this 70mm scene. A special Extravehicular Activity (EVA) was required by astronauts Jerry L. Ross and Jerome (Jay) Apt to manually extend the high-gain antenna on GRO. The five-member crew capped off a busy Flight Day 3 by releasing the heavy payload.

STS064-05-028 (9-20 Sept. 1994) --- On the space shuttle Discovery's aft flight deck, astronaut Susan J. Helms handles controls for the Remote Manipulator System (RMS). The robot arm operated by Helms, who remained inside the cabin, was used to support several tasks performed by the crew during the almost 11-day mission. Those tasks included the release and retrieval of the free-flying Shuttle Pointed Autonomous Research Tool For Astronomy 201 (SPARTAN 201), a six-hour spacewalk and the Shuttle Plume Impingement Flight Experiment (SPIFEX). Photo credit: NASA or National Aeronautics and Space Administration
During STS-31, the Hubble Space Telescope (HST), grappled by the remote manipulator system (RMS) end effector, is held against the blackness of space. The two solar array (SA) wings (large gold panels) are fully extended with bistem cassette and secondary deployment mechanism (SDM) handle clearly visible. The two deployed high gain antennae (HGA) masts are parallel to the SA panels. RMS end effector is positioned on the starboard fixture during the predeployment checkout operations above Discovery's, Orbiter Vehicle (OV) 103's, payload bay (PLB).
Backdropped against the Earth's surface, the Gamma Ray Observatory (GRO) with its solar array (SA) panels deployed is grappled by the remote manipulator system (RMS) during STS-37 systems checkout. GRO's four complement instruments are visible: the Energetic Gamma Ray Experiment Telescope (EGRET) (at the bottom); the Imaging Compton Telescope (COMPTEL) (center); the Oriented Scintillation Spectrometer Experiment (OSSE) (top); and Burst and Transient Source Experiment (BATSE) (on four corners). The view was taken by STS-37 crew through an aft flight deck overhead window.

STS057-84-000AD (24 June 1993) --- The recently "captured" European Retrievable Carrier (EURECA) was recorded on 70mm film as it was berthed in the Space Shuttle Endeavour's aft cargo bay, assisted by the Canadian-built Remote Manipulator System (RMS), partially visible in upper right. Moments later the RMS eased EURECA into its stowage area between Endeavour's aft cargo bay firewall and the SpaceHab module (partially visible in foreground).
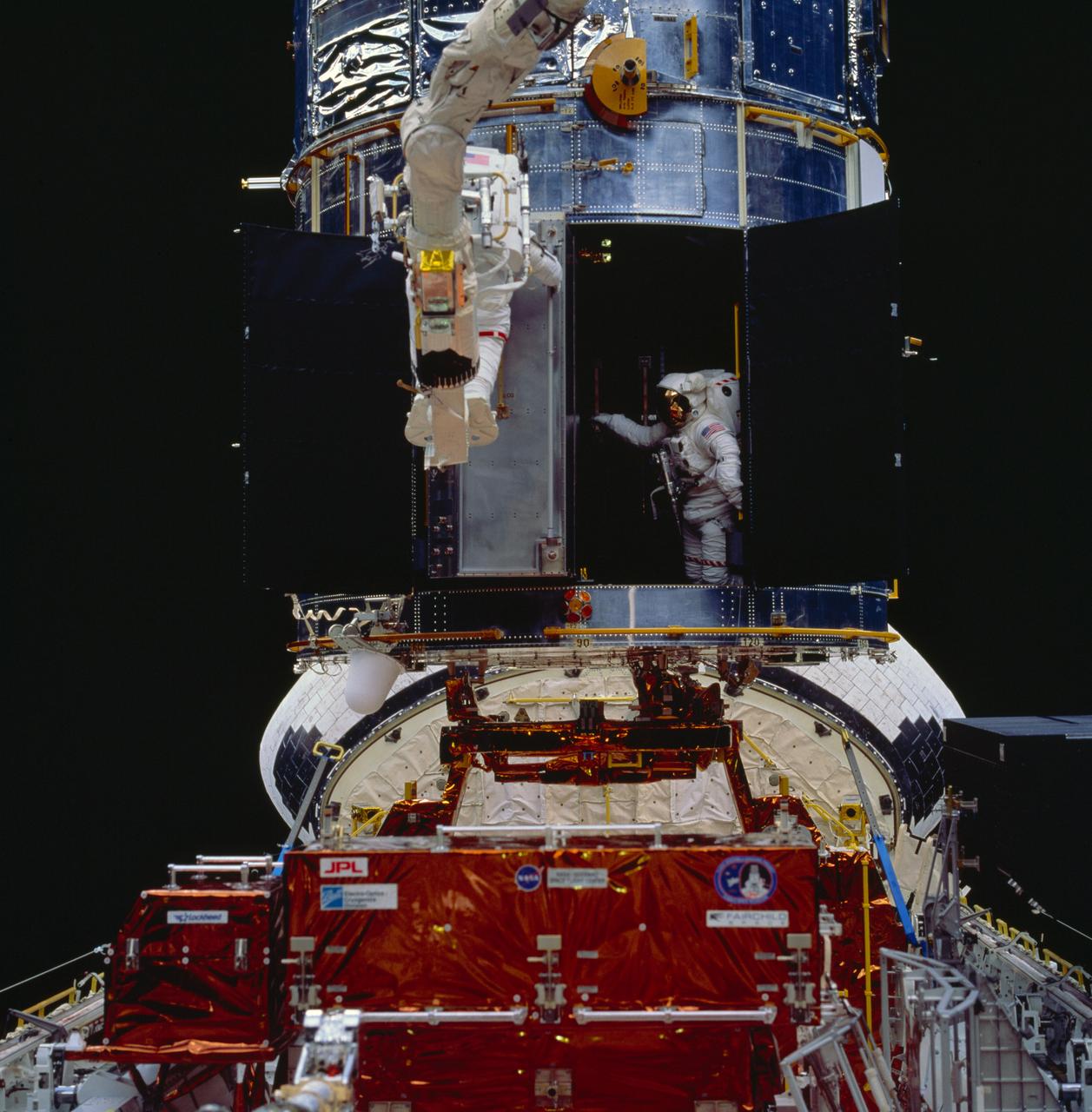
STS061-94-050 (8 Dec 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR, during their extravehicular activity (EVA).

STS061-86-030 (4 Dec 1993) --- The Hubble Space Telescope (HST) is pictured in the Space Shuttle Endeavour's cargo bay following its capture and berthing early in the eleven-day STS-61 mission. The Remote Manipulator System (RMS) arm, with television cameras mounted on it, was maneuvered from inside the cabin in order to survey HST. Five days of space walks followed, during which a variety of servicing tasks were performed by four crew members.

STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.

STS064-111-070 (9-20 Sept. 1994) --- The astronauts onboard the space shuttle Discovery used a 70mm camera to capture this view of the pre-deploy operations with the Shuttle Pointed Autonomous Research Tool for Astronomy (SPARTAN-201) 201. In the grasp of the robot arm device of the Remote Manipulator System (RMS), SPARTAN 201 hovers above Discovery's cargo bay prior to its two days of free-flight, some 40 miles away from the parent spacecraft. Photo credit: NASA or National Aeronautics and Space Administration

STS061-77-094 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored to the end of the Remote Manipulator System (RMS) arm, prepares to stow the Wide Field\Planetary Camera (WF\PC I) for the Hubble Space Telescope (HST), during their extravehicular activity (EVA). Astronaut F. Story Musgrave, stationed at the stowage area at bottom of frame, assists. WF/PC II is in place on the HST.
STS061-79-072 (4 Dec 1993) --- The Hubble Space Telescope (HST) is backdropped against the blackness of space in this 70mm frame recorded during a video survey of the spacecraft following the telescope's recent berthing in the Space Shuttle Endeavour's cargo bay. European Space Agency (ESA) scientist Claude Nicollier controlled the Remote Manipulator System (RMS) arm slowly so that mounted TV cameras could show flight controllers the various areas on the telescope.

STS064-72-093 (10 Sept. 1994) --- With the blue and white Earth as a backdrop 130 miles below, the Shuttle Plume Impingement Flight Experiment (SPIFEX) is at work on the end of the Remote Manipulator System (RMS) arm. The 50-feet-long arm is extended to 80 feet with the temporary addition of the SPIFEX hardware. The image was exposed with a 70mm handheld Hasselblad camera from inside the space shuttle Discovery's crew cabin. Photo credit: NASA or National Aeronautics and Space Administration

51I-44-014 (31 Aug-1 Sept. 1985) --- This photograph is one of a series of six covering extravehicular activity (EVA) which were released by NASA on Sept. 4, 1985. Here, astronaut James D. van Hoften, dwarfed by the large satellite, moves in for initial contact. Astronaut John M. (Mike) Lounge, out of frame inside cabin, maneuvers the remote manipulator system (RMS) arm to assist astronauts van Hoften and William F. Fisher. Photo credit: NASA

51A-104-008 (14 Nov 1984) --- Astronaut Dale A. Gardner appears to be under the remote manipulator system (RMS) end effector as he makes a turn in space and prepared to traverse, using the manned maneuvering unit (MMU) backpack, to the nearby Westar VI to "Sting" it with the device he carries. The stringer will enter the communications satellite through the nozzle of the spent motor. Gardner achieved a hard dock at 6:32 A.M. and this picture was photographed about five minutes earlier, on Nov. 14, 1984.

STS031-76-026 (25 April 1990) --- Most of the giant Hubble Space Telescope (HST) can be seen as it is suspended in space by Discovery's Remote Manipulator System (RMS) following the deployment of part of its solar panels and antennae. The photo was taken with a handheld Hasselblad camera. This was among the first photos NASA released on April 30, 1990, from the five-day STS 31 mission.

STS062-05-035 (4-18 March 1994) --- This 35mm frame, photographed on the aft flight deck of the earth-orbiting Space Shuttle Columbia, captures crew activity with the Dexterous End Effector (DEE) on the Remote Manipulator System (RMS). Astronauts Pierre J. Thuot and Marsha S. Ivins communicate with ground controllers during operations and observations with DEE. During the 14-day mission, three of the five STS-62 crewmembers took turns operating and observing the RMS in a series of one-hour sessions.

STS061-53-026 (4 Dec 1993) --- One of the Space Shuttle Endeavour's aft flight deck windows frames this view of the Hubble Space Telescope (HST) as it approaches the Endeavour. Backdropped against western Australia, the Remote Manipulator System (RMS) arm awaits the arrival of the telescope. Once berthed in Endeavour's cargo bay, HST underwent five days of servicing provided by four space walking crew members. Shark Bay (upper left) and Perth (lower left) are visible in the frame.

STS061-77-078 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored on the end of the Remote Manipulator System (RMS) arm, is pictured with the Wide Field/Planetary Camera (WF/PC I) during the third of five extravehicular activity?s (EVA). Astronauts Hoffman and F. Story Musgrave, seen near the stowage area for the WF/PC, had earlier installed the new camera (note white rectangle) on lower portion of telescope.

STS066-129-043 (3-14 Nov 1994) --- Clouds over the Atlantic Ocean serve as the backdrop for this 70mm scene of the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere (CRISTA), attached to the Shuttle Pallet System (SPAS). CRISTA-SPAS was in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) arm. The crew deployed the CRISTA-SPAS on November 4, 1994 and the tandem remained in free-flight until November 12, 1994 when it was retrieved by the Canadian-built RMS, controlled by payload commander Ellen Ochoa. Other crew members onboard Atlantis were astronauts Donald R. McMonagle, Curtis L. Brown, Jr., Scott E. Parazynski and Joseph R. Tanner, along with Jean-François Clervoy of the European Space Agency (ESA). The six astronauts spent 11-days in Earth-orbit in support of the Atmospheric Laboratory for Applications and Science (ATLAS-3) mission.

STS039-17-017 (3 May 1990) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) as it approaches the remote manipulator system (RMS) end effector following a period of free-flight and data collection. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS. A huge blanket of white clouds obscures identifiable points on Earth, nearly 300 statute miles away. The target grappling apparatus on SPAS is clearly seen near bottom center of frame.

Astronauts Jerry L. Ross (left) and Sherwood C. (Woody) Spring are photographed as they assemble pieces of the Experimental Assembly of Structures in Extravehicular Activities (EASE) device in the open payload bay. The Canadian-built remote manipulator system (RMS) arm (partially obscured in the right portion of the frame) is in position to allow television cameras to record the activity.

STS046-102-021 (1 Aug 1992) --- The European Space Agency's (ESA) EURECA satellite remains in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) as the Space Shuttle passes over the Persian Gulf. Most of the theater of the recent war is visible in the frame. Parts of Kuwait, Iraq, Iran and Saudi Arabia can be delineated. The Tethered Satellite System (TSS) remains stowed in the aft cargo bay of Atlantis.
Held in appendage deploy position by Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS), the Hubble Space Telescope's (HST's) starboard solar array (SA) bistem cassette is released from its stowed position on the Support System Module (SSM) forward shell. The spreader bar & bistem begin to unfurl the SA wing. View was taken by an STS-31 crewmember through an overhead window & is backdropped against the surface of the Earth.

51F-42-069 (29 July-6 Aug 1985) --- The solar optical universal polarimeter (SOUP) experiment is visible among the cluster of Spacelab 2 hardware in the cargo bay of the Earth-orbiting Space Shuttle Challenger, backdropped against a curtain of white clouds over ocean waters. Various components of the instrument positioning system (IPS) are conspicuous at the center of the frame. Now resting, the remote manipulator system (RMS) was used at various points during the mission with the plasma diagnostics package (PDP) and as a support service structure for television cameras covering various activities of the busy science-oriented Spacelab 2 mission.

51D-04-015 (15 April 1985) --- Astronaut Rhea Seddon and Karol J. Bobko continue work on snag-type extension for the Remote Manipulator System (RMS) as part of an effort to activate a lever on a troubled communications satellite. Since the crew learned soon after deployment of the Syncom IV (LEASAT) spacecraft that it was not functioning properly plans were formulated for a rendezvous in space between the Discovery and the satellite. A fly swatter-like extension and another resembling a LaCrosse stick were fashioned from onboard supplies and furnishings. Stowage lockers nearby serve as a work bench for the two. At various times during the seven-day mission, the majority of the seven-member crew participated in the tool-making and preparations for an extravehicular activity (EVA) by the flights other two mission specialists -- Jeffrey A. Hoffman and S. David Griggs -- to connect the two tools to the RMS. Bobko is mission commander and Dr. Seddon, a mission specialist.

STS007-32-1667 (22 June 1983) --- The Earth-orbiting Space Shuttle Challenger over a heavily cloud-covered portion of the Earth was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa-B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew and the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay of the Space Shuttle Challenger for the return to Earth.

STS066-96-030 (3-14 Nov 1994) --- Masses of clouds serve as the backdrop for this close-up 70mm scene of the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere (CRISTA), attached to the Shuttle Pallet Satellite (SPAS). CRISTA-SPAS was in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) arm. The crew deployed the CRISTA-SPAS on November 4, 1994 and the spacecraft remained in free-flight until November 12, 1994 when it was retrieved by the Canadian-built RMS, controlled by payload commander Ellen Ochoa. Other crew members onboard Atlantis were astronauts Donald R. McMonagle, Curtis L. Brown, Jr., Scott E. Parazynski and Joseph R. Tanner, along with Jean-Francois Clervoy of ESA. The six astronauts spent 11-days in Earth-orbit in support of the Atmospheric Laboratory for Applications and Science (ATLAS-3) mission.

STS057-93-052 (24 June 1993) --- The European Retrievable Carrier (EURECA) is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The photo was taken after EURECA's "capture" from Earth-orbit but prior to its berthing in the Shuttle's cargo bay. The southern two-thirds of the state of Florida, part of the Gulf of Mexico and clouds over the Atlantic form the backdrop for the 70mm image.

S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

51I-41-086 (1 September 1985) --- Astronaut James D. van Hoften, mission specialist, flexes his muscles in celebration of a triumphant extravehicular task. Clouds over the ocean form the backdrop for this 70mm scene, toward the end of a two-day effort to capture, repair and release the previously errant Syncom IV-3 communications satellite. Van Hoften, anchored to a special foot restraint device on the end of Discovery's Remote Manipulator System (RMS), had just performed the final "shove" that started the relative separation of the Shuttle and the Syncom, which is not far out of frame. He had been joined by astronaut William F. Fisher for the busy two days of EVA.

STS064-90-031 (9-20 Sept. 1994) --- Backdropped against the darkness of space beneath Earth's horizon 130 nautical miles away, the cargo bay of the space shuttle Discovery and its related payloads were captured on 70mm film by one of the six cabin-bound astronauts. In the foreground is the Lidar In-space Technology Experiment (LITE). The robot arm portion of the Remote Manipulator System (RMS), busy throughout much of the almost 11-day mission, is in a stowed position on Discovery's port side. Photo credit: NASA or National Aeronautics and Space Administration

S77-E-5053 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The Spacehab module can be seen in the foreground. The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.
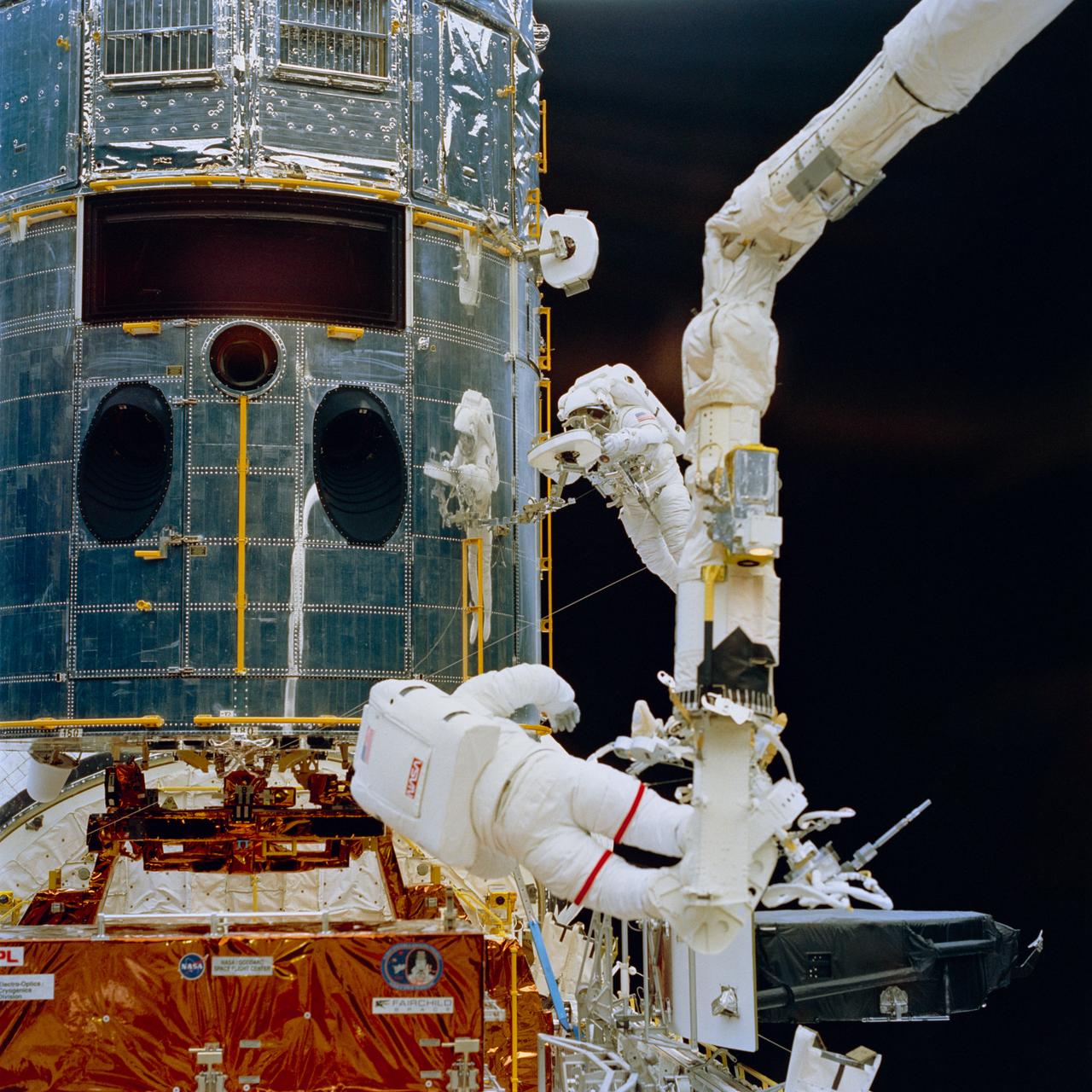
STS061-74-046 (7 Dec 1993) --- Anchored on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman (foreground) prepares to install the new Wide Field\Planetary Camera (WFPC II) into the empty cavity (top left) on the Hubble Space Telescope (HST). WFPC I is seen temporarily stowed at bottom right. Astronaut F. Story Musgrave works with a Portable Foot Restraint (PFR) at frame center, as his image is reflected in the shiny surface of the telescope. Hoffman and Musgrave shared chores on three of the five extravehicular activity?s (EVA) during the mission.

S77-E-5052 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS061-77-102 (7 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave are partially silhouetted against the Indian Ocean as they work to install the Magnetic Sensing System (MSS) on the Hubble Space Telescope (HST). Musgrave is anchored to the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The HST is positioned along the southern end of Madagascar, 325 nautical miles away. Visible on the western coast are the sediment laden Onilahy and Fiherenana Rivers which empty into Saint Augustin Bay. North of Fiherenana River is the Mangoky River. The circular feature on the southern end of Madagascar and to the right of HST is the L'ivakoany Mountains. The eastern coast is relatively straight compared to the western coast.

During STS-31, the Hubble Space Telescope (HST) is held in appendage deploy position by Discovery's, Orbiter Vehicle (OV) 103's, remote manipulator system (RMS) above the payload bay (PLB) and crew compartment cabin. While in this position the solar array (SA) wing bistem cassette (HST center) is deployed from its stowed location along side the Support System Module (SSM) forward shell. A high gain antenna (HGA) remains stowed along the SSM. The Earth's surface and the Earth limb creates a dramatic backdrop.

STS064-311-033 (10 Sept. 1994) --- Half of the crew members share support of the Shuttle Plume Impingement Flight Experiment (SPIFEX) in this 35mm frame. Astronauts Susan J. Helms and Mark C. Lee (foreground) share a pertinent bit of data while astronaut L. Blaine Hammond in the background controls Reaction Control System (RCS) thrusters on the space shuttle Discovery. Helms' role was to control the Remote Manipulator System (RMS) arm, to which 30-feet of SPIFEX hardware were appended in order to measure the RCS plume induced loads in the far field region. Lee records data on a lap top Payload General Support Computer (PGSC). SPIFEX was developed to help understand the thruster effects on approaching spacecraft. Photo credit: NASA or National Aeronautics and Space Administration

STS031-03-014 (25 April 1990) --- The Hubble Space Telescope (HST), still in the grasp of Discovery's Remote Manipulator System (RMS), is backdropped over Earth some 332 nautical miles below. In this scene, HST has deployed one of its solar array panels but is yet to have extended the second. This scene was captured with a 35mm camera aimed through an overhead window on aft the flight deck.

STS061-48-001 (9 Dec 1993) --- Orbiting Earth at an altitude of 356 nautical miles perched atop a foot restraint on the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronauts F. Story Musgrave (top) and Jeffrey A. Hoffman wrap up the final of five Extravehicular Activities (EVA). The west coast of Australia forms the backdrop for the 35mm frame.
Astronaut Sherwood C. Spring, anchored to the foot restraint on the remote manipulator system (RMS) arm, checks joints on the tower-like Assembly Concept for Construction of Erectable Space Structures (ACCESS) device extending from the payload bay as the Atlantis flies over white clouds and blue ocean waters. The Gulf of Mexico waters form the backdrop for the scene.