
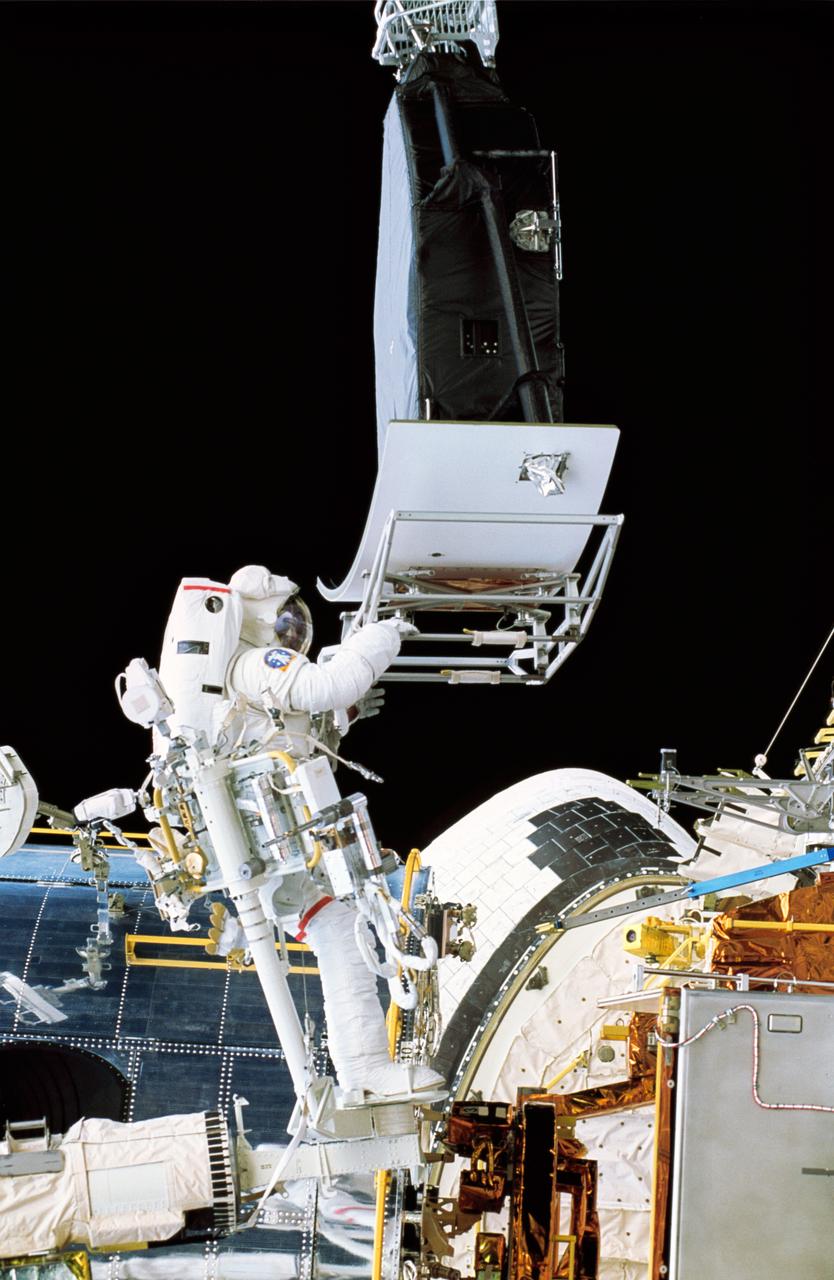
STS061-95-028 (6 Dec 1993) --- Astronaut Kathryn C. Thornton, on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST) during the second extravehicular activity (EVA) on the eleven-day mission. Astronauts Thornton and Thomas D. Akers changed out the solar array panels during this EVA.

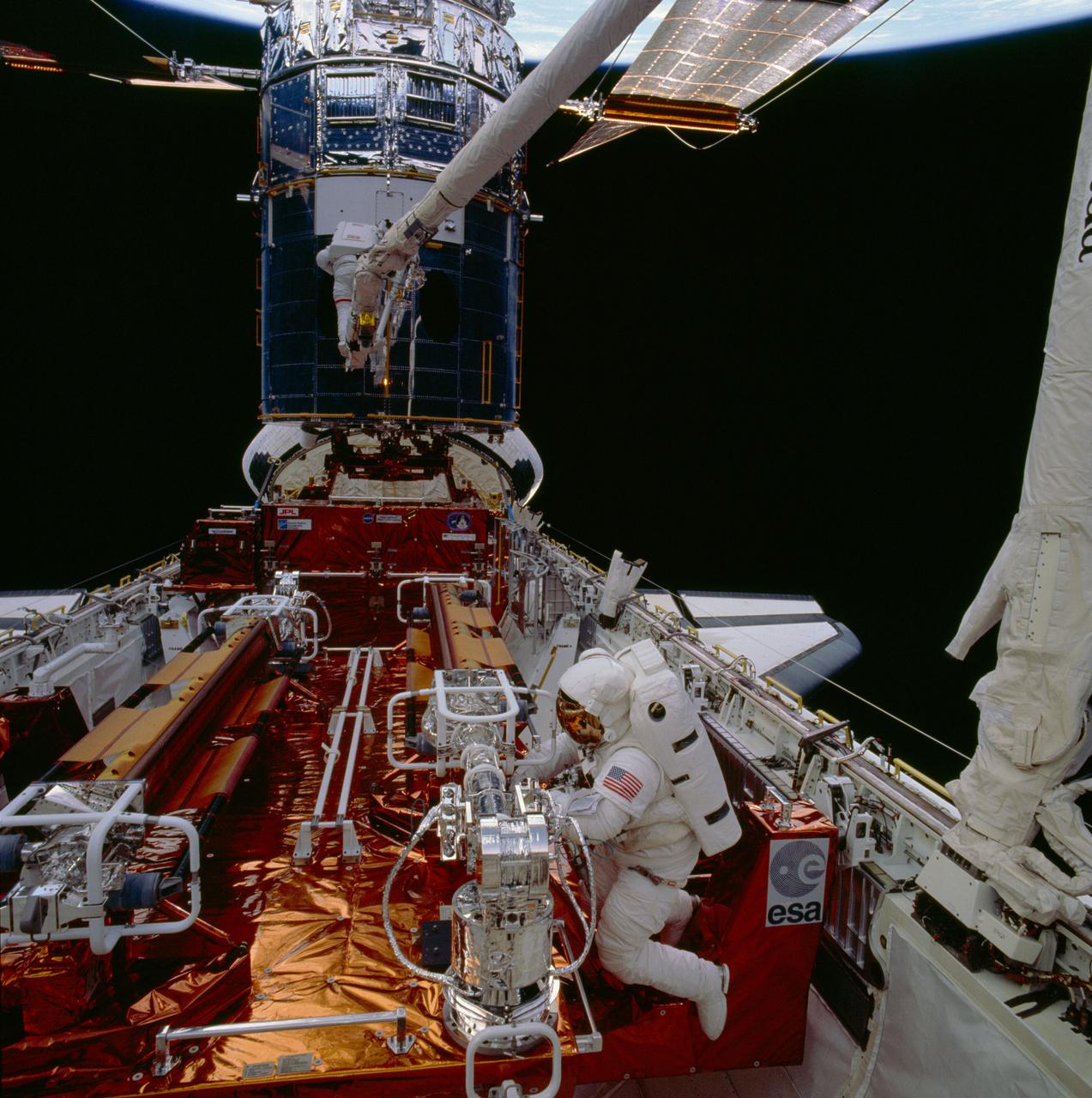
STS061-77-094 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored to the end of the Remote Manipulator System (RMS) arm, prepares to stow the Wide Field\Planetary Camera (WF\PC I) for the Hubble Space Telescope (HST), during their extravehicular activity (EVA). Astronaut F. Story Musgrave, stationed at the stowage area at bottom of frame, assists. WF/PC II is in place on the HST.

STS061-77-078 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored on the end of the Remote Manipulator System (RMS) arm, is pictured with the Wide Field/Planetary Camera (WF/PC I) during the third of five extravehicular activity?s (EVA). Astronauts Hoffman and F. Story Musgrave, seen near the stowage area for the WF/PC, had earlier installed the new camera (note white rectangle) on lower portion of telescope.

STS061-48-027 (9 Dec 1993) --- Astronaut F. Story Musgrave moves about in the Space Shuttle Endeavour's cargo bay during the deployment of the solar array panels on the Hubble Space Telescope (HST) during the final of five STS-61 space walks. The left hand of astronaut Jeffrey A. Hoffman appears at lower left corner.
STS061-37-011 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman with Wide Field/Planetary Camera (WF/PC 1) during changeout operations. WF/PC-2 has already been installed in cavity (out of frame). Astronauts Hoffman and Story Musgrave are performing Extravehicular Activities (EVA) to repair the Hubble Space Telescope (HST).

STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.

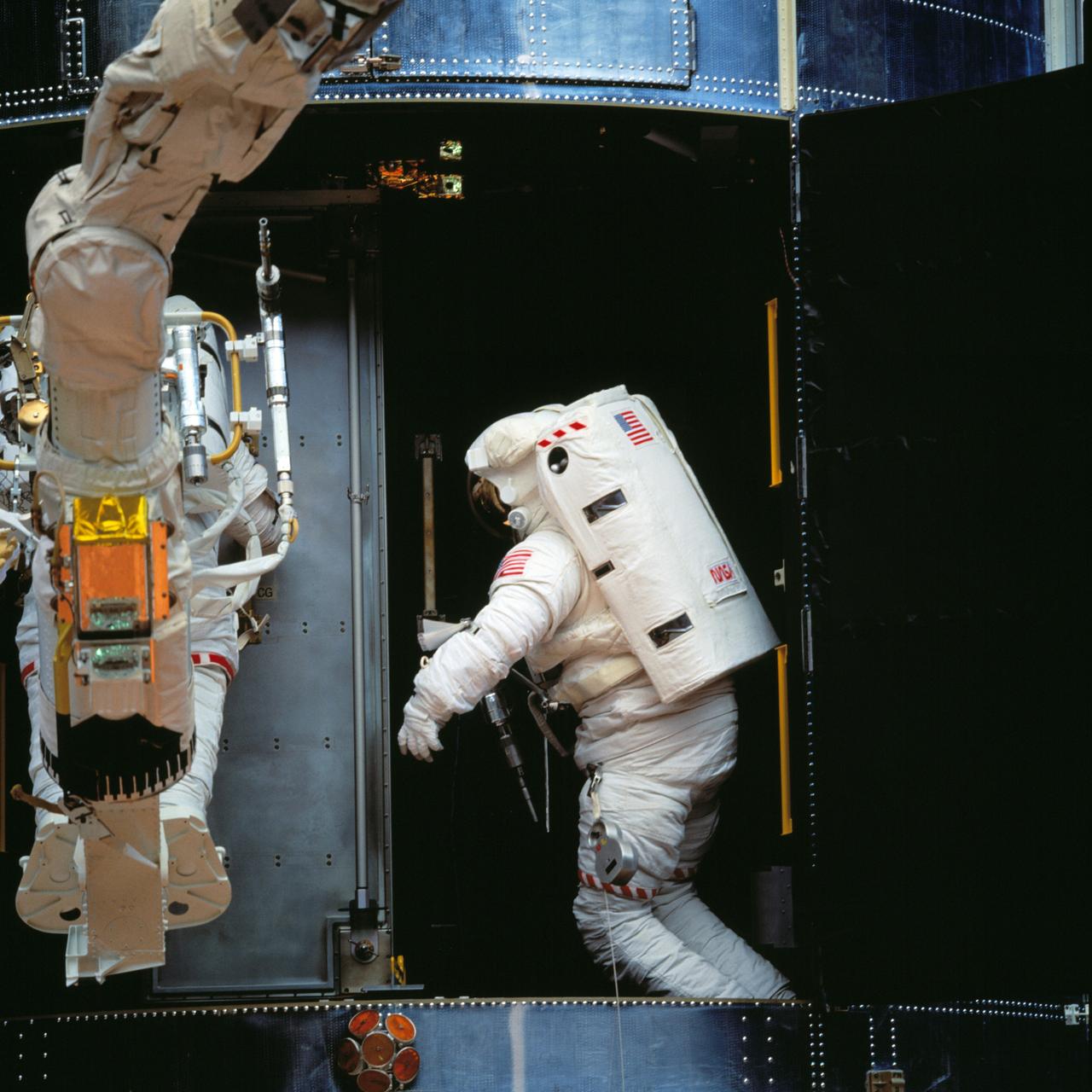
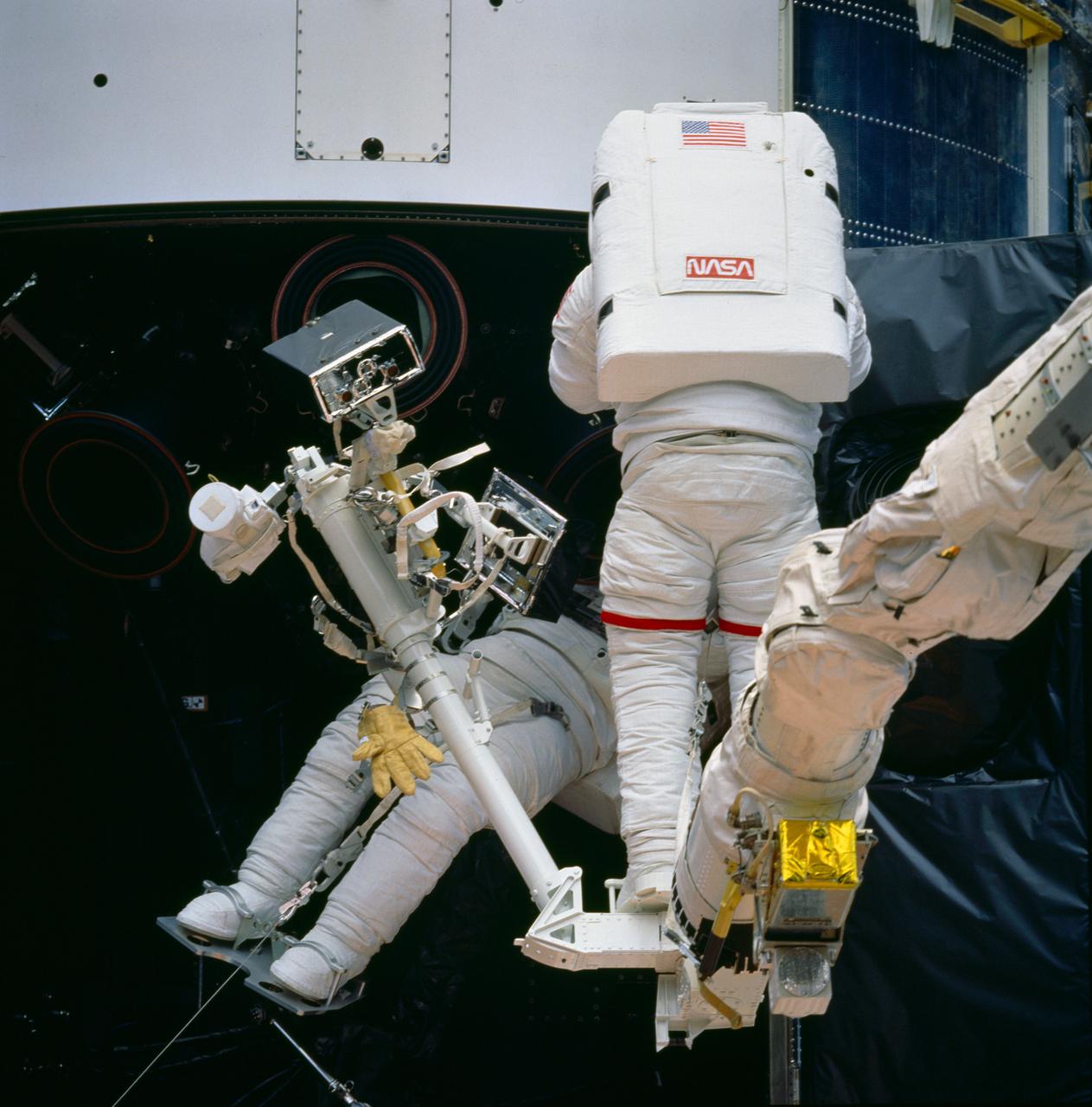
Preparing for the eventual launch of the Hubble Space Telescope (HST), an astronaut prepares himself for the rigorous duties of maintenance and repairs after launch, at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS). The NBS provided mock-ups of the HST, the Remote Manipulator System (RMS), the orbiter's cargo bay, and the low-gravity environment that the astronauts would encounter while working in space. All aspects of shuttle missions were pre-plarned and practiced at the NBS to forego any problems in space.
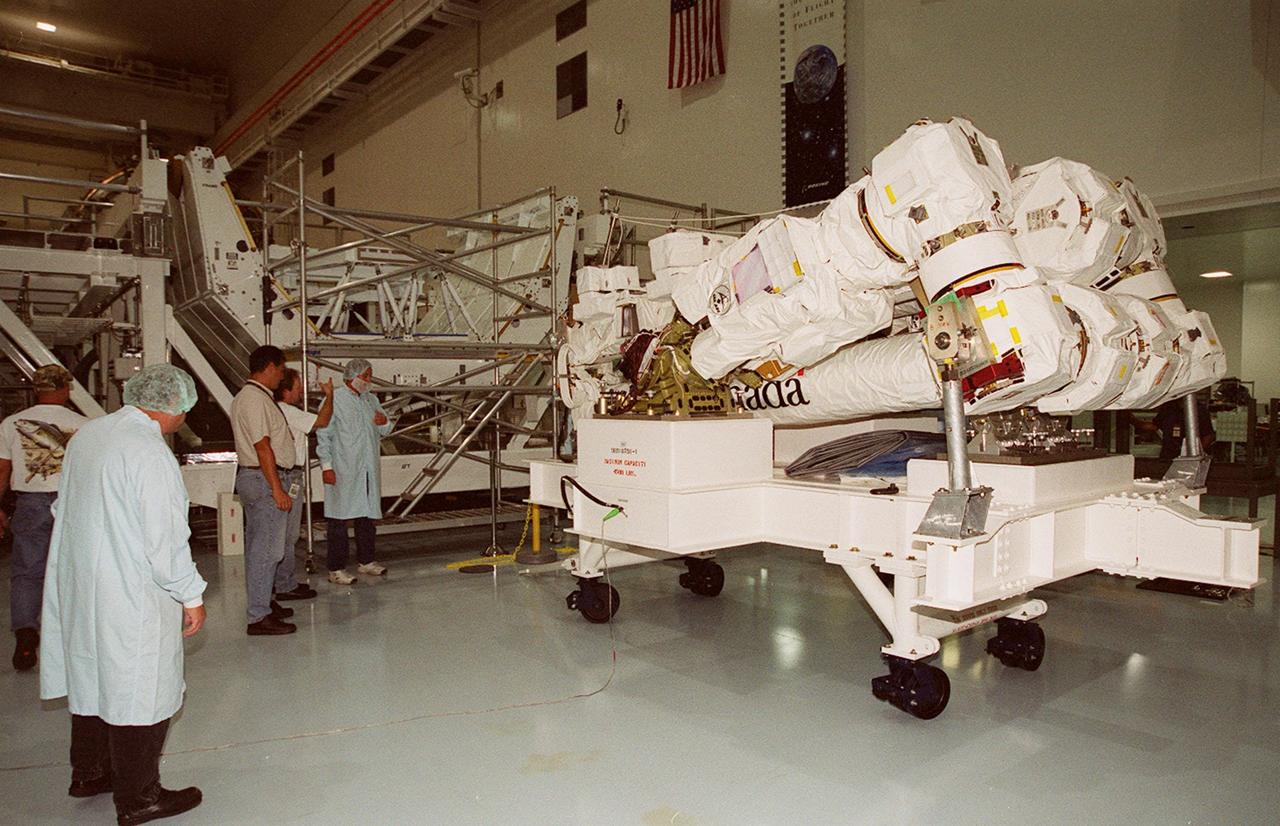
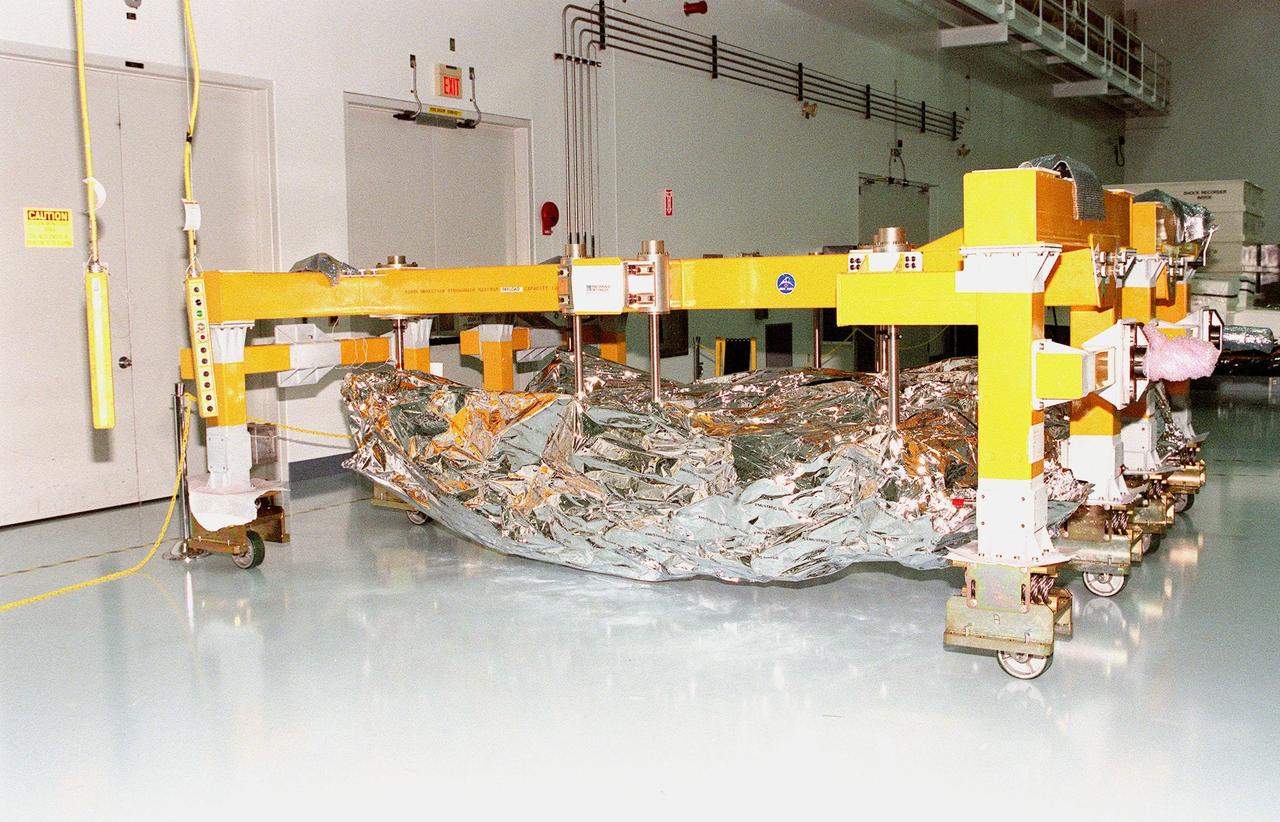
The Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” (at right) arrives at a pallet in the Space Station Processing Facility where it will undergo testing once in place. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
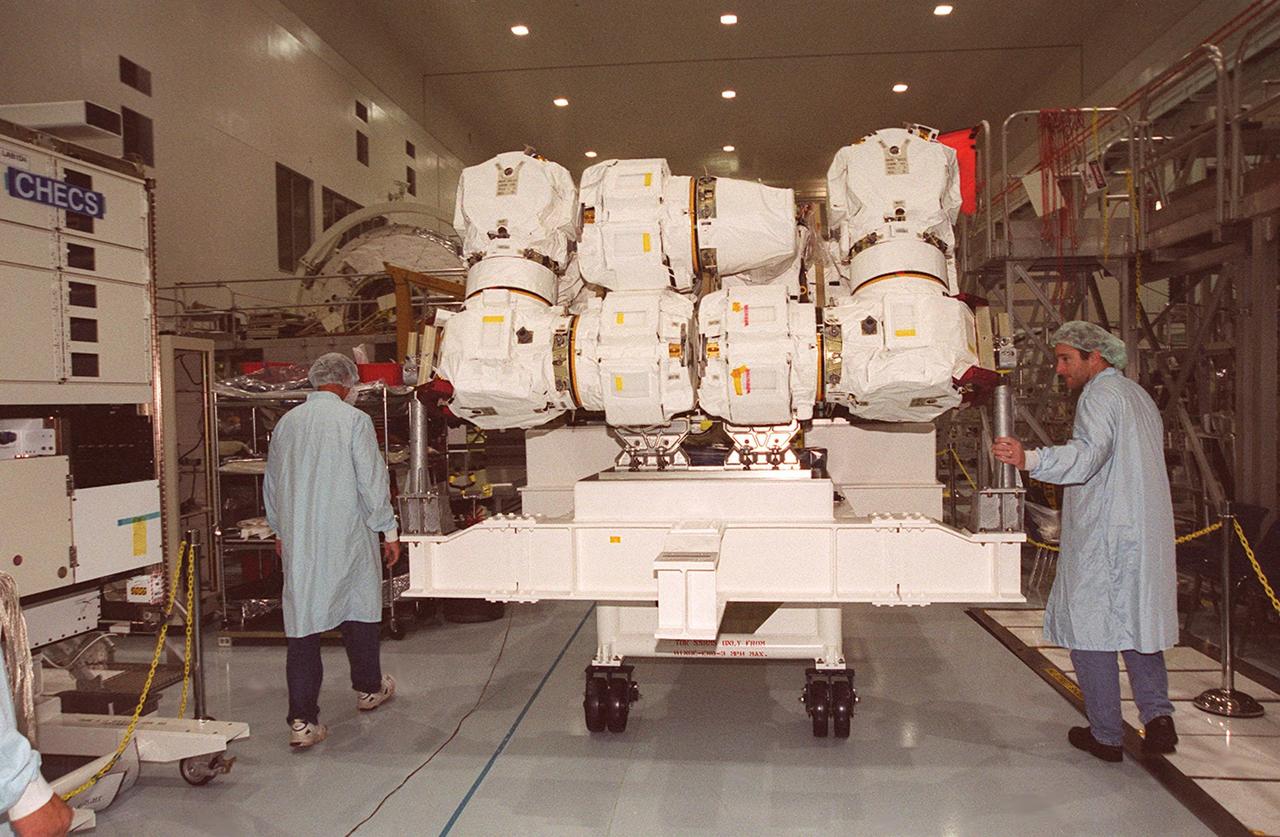
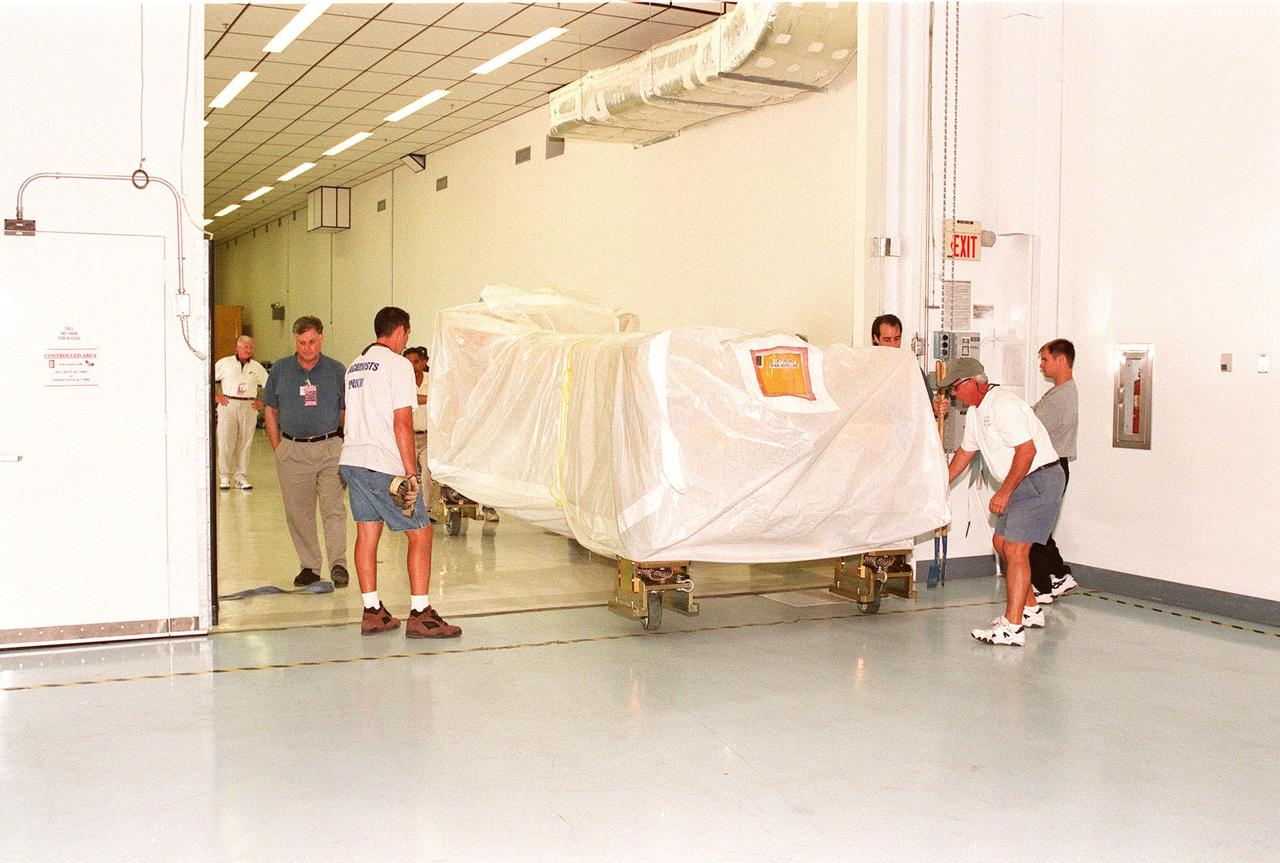
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001

STS061-77-102 (7 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave are partially silhouetted against the Indian Ocean as they work to install the Magnetic Sensing System (MSS) on the Hubble Space Telescope (HST). Musgrave is anchored to the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The HST is positioned along the southern end of Madagascar, 325 nautical miles away. Visible on the western coast are the sediment laden Onilahy and Fiherenana Rivers which empty into Saint Augustin Bay. North of Fiherenana River is the Mangoky River. The circular feature on the southern end of Madagascar and to the right of HST is the L'ivakoany Mountains. The eastern coast is relatively straight compared to the western coast.

Prior to its launch in April 1990, the Hubble Space Telescope (HST) went through years of development and testing. The HST was the first of its kind and the scientific community could only imagine the fruits of their collective labors. However, prior to its launch, more practical procedures, such as astronaut training, had to be developed. As the HST was to remain in orbit for years, it became apparent that on-orbit maintenance routines would have to be developed. The best facility to develop these maintenance practices was at the Neutral Buoyancy Simulator (NBS) at the Marshall Space Flight Center (MSFC). The NBS provided mock-ups of the HST (in sections), a Remote Manipulator System (RMS), and a shuttle's cargo bay pallet. This real life scenario provided scientists, engineers, and astronauts a practical environment to work out any problems with a plarned on-orbit maintenance mission. Pictured is an astronaut in training with a mock-up section of the HST, practicing using tools especially designed for the task being performed.

STS061-98-050 (9 Dec 1993) --- Astronaut F. Story Musgrave, anchored on the end of the Remote Manipulator System (RMS) arm, prepares to be elevated to the top of the towering Hubble Space Telescope (HST) to install protective covers on magnetometers. Astronaut Jeffrey A. Hoffman (bottom of frame) assisted Musgrave with final servicing tasks on the telescope, wrapping up five days of extravehicular activities (EVA).

STS061-105-026 (7 Dec. 1993) --- Astronaut Jeffrey A. Hoffman signals directions to European Space Agency (ESA) astronaut Claude Nicollier, as the latter controls the Remote Manipulator System (RMS) arm during the third of five Extravehicular Activities (EVA) on the Hubble Space Telescope (HST) servicing mission. Astronauts Hoffman and F. Story Musgrave earlier changed out the Wide Field\Planetary Camera (WF\PC).

STS061-48-001 (9 Dec 1993) --- Orbiting Earth at an altitude of 356 nautical miles perched atop a foot restraint on the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronauts F. Story Musgrave (top) and Jeffrey A. Hoffman wrap up the final of five Extravehicular Activities (EVA). The west coast of Australia forms the backdrop for the 35mm frame.

STS061-98-0AR (8 Dec 1993) --- Earth is partially illuminated but the Hubble Space Telescope (HST) and the Space Shuttle Endeavour are still mostly in darkness, in this 70mm frame photographed during the fourth of five space walks. Astronaut Kathryn C. Thornton, barely visible above left center in the frame, works to install the Corrective Optics Space Telescope Axial Replacement (COSTAR).

STS061-99-009 (9 Dec 1993) --- Sunlight reflects off the Space Shuttle Endeavour's aft windows and the shiny Hubble Space Telescope (HST) prior to its post-servicing deployment near the end of the eleven-day mission. A handheld Hasselblad camera was used inside Endeavour's cabin to record the image.

STS061-104-007 (5 Dec 1993) --- Astronaut F. Story Musgrave, holding to one of many strategically placed handrails on the Hubble Space Telescope (HST), is photographed during the first of five extravehicular activity?s (EVA) on the HST-servicing mission, aboard the Space Shuttle Endeavour.
STS061-86-048 (5 Dec 1993) --- Astronauts F. Story Musgrave (foreground) and Jeffrey A. Hoffman are pictured near the end of the first of five extravehicular activity?s (EVA). Musgrave works at the Solar Array Carrier (SAC) in the Space Shuttle Endeavour's cargo bay. Hoffman, anchored to a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, waits to be maneuvered to the forward payload bay. The original solar array panels are partially visible at top, while their replacements remain stowed in foreground. The crew's second pair of space walkers -- astronauts Kathryn C. Thornton and Thomas D. Akers -- later changed the solar arrays on the mission's second EVA.
STS061-94-059 (8 Dec. 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR.

STS061-102-010 (9 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave team to replace one of two Solar Array Drive Electronics (SADE) units on the Hubble Space Telescope (HST). Musgrave is standing on a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The black object, in upper left corner, is part of the window frame, through which this 70mm frame was exposed, inside Endeavour's cabin.

STS061-95-075 (6 Dec 1993) --- Astronauts Kathryn C. Thornton and Thomas D. Akers work to remove one of the solar arrays on the Hubble Space Telescope (HST) on the second of five extravehicular activity?s (EVA). The two space walkers later replaced both solar array panels. Part of Australia is in the background.
STS061-87-046 (5 Dec 1993) --- Astronauts Jeffrey A. Hoffman (right) and F. Story Musgrave work near the base of the Hubble Space Telescope (HST) on the first of five spacewalks. Their particular mission here is to replace failed Rate Sensor Units (RSU) inside the telescope's housing. Hoffman is anchored to a foot restraint, mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, while Musgrave is standing on a foot restraint attached to a support structure in the cargo bay.
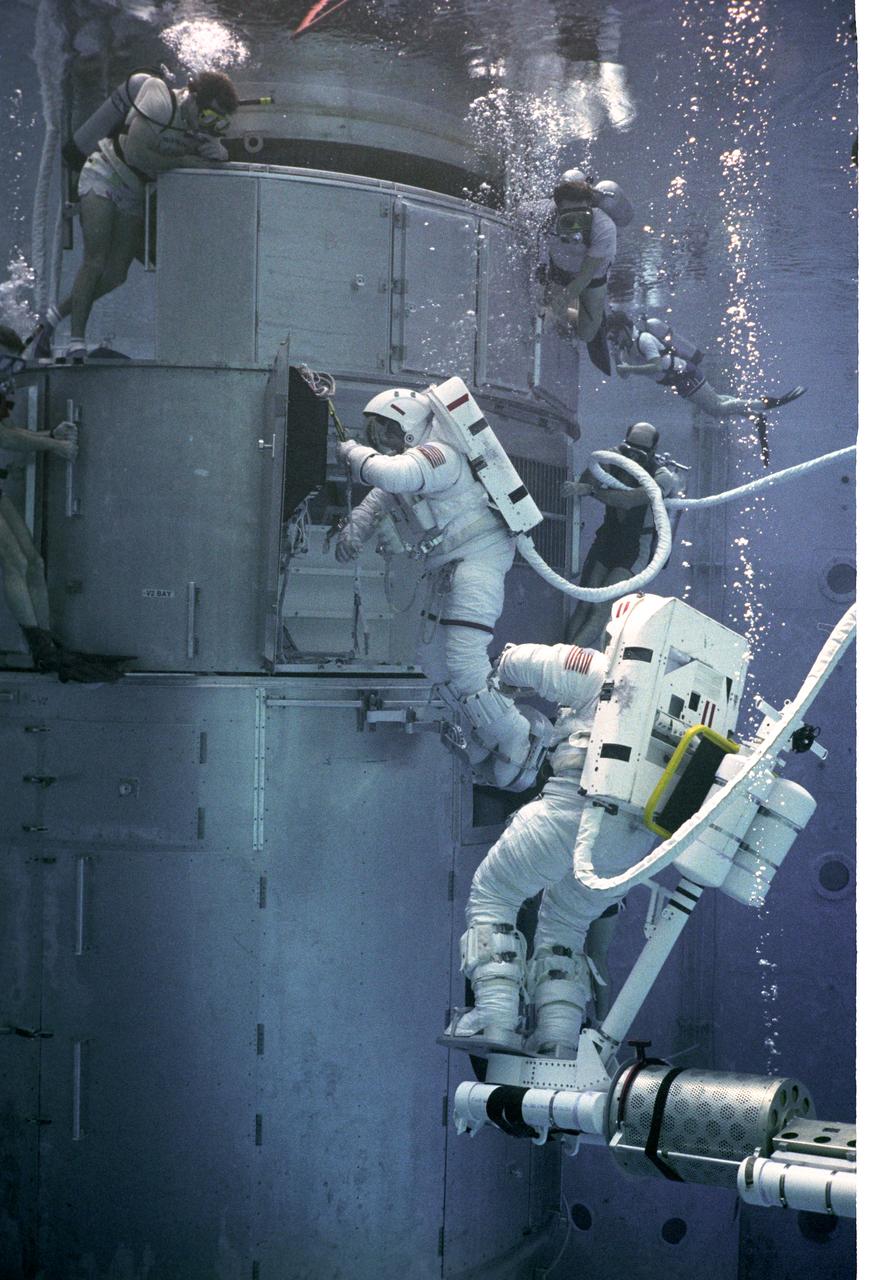
Prior to its launch in April 1990, the Hubble Space Telescope (HST) went through years of development and testing. The HST was the first of its kind and the scientific community could only imagine the fruits of their collective labors. However, prior to its launch, more practical procedures, such as astronaut training, had to be developed. As the HST was to remain in orbit for years, it became apparent that on-orbit maintenance routines would have to be developed. The best facility to develop these maintenance practices was at the Neutral Buoyancy Simulator (NBS) at the Marshall Space Flight Center (MSFC). The NBS provided mock-ups of the HST (in sections), a Remote Manipulator System (RMS), and a shuttle's cargo bay pallet. This real life scenario provided scientists, engineers, and astronauts a practical environment to work out any problems with a plarned on-orbit maintenance mission. Pictured are two astronauts training at MSFC's NBS. One astronaut is using a foot restraint system attached to the RMS, while the other astronaut performs maintenance techniques while attached to the surface of the HST mock-up.

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, members of the STS-124 crew get a close look at the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Japanese Experiment Module, called Kibo. They will be used to exchange experiment payloads or hardware located on the Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the pressurized module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, STS-124 Mission Specialist Michael Fossum gets a close look at the Remote Manipulator System, or RMS, two robotic arms that support operations on the outside of the Japanese Experiment Module, called Kibo. They will be used to exchange experiment payloads or hardware located on the Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the pressurized module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units. Crew members are at Kennedy for a crew equipment interface test that includes familiarization with tools and equipment that will be used on the mission. The STS-124 mission is the second of three flights that will launch components to complete the Japanese pressurized module, the Kibo laboratory. The mission will include two spacewalks to install the new lab and its remote manipulator system. The lab's logistics module, which will have been installed in a temporary location during STS-123, will be attached to the new lab. Photo credit: NASA/Kim Shiflett

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at Kennedy Space Center to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

Workers uncrate a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) in the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

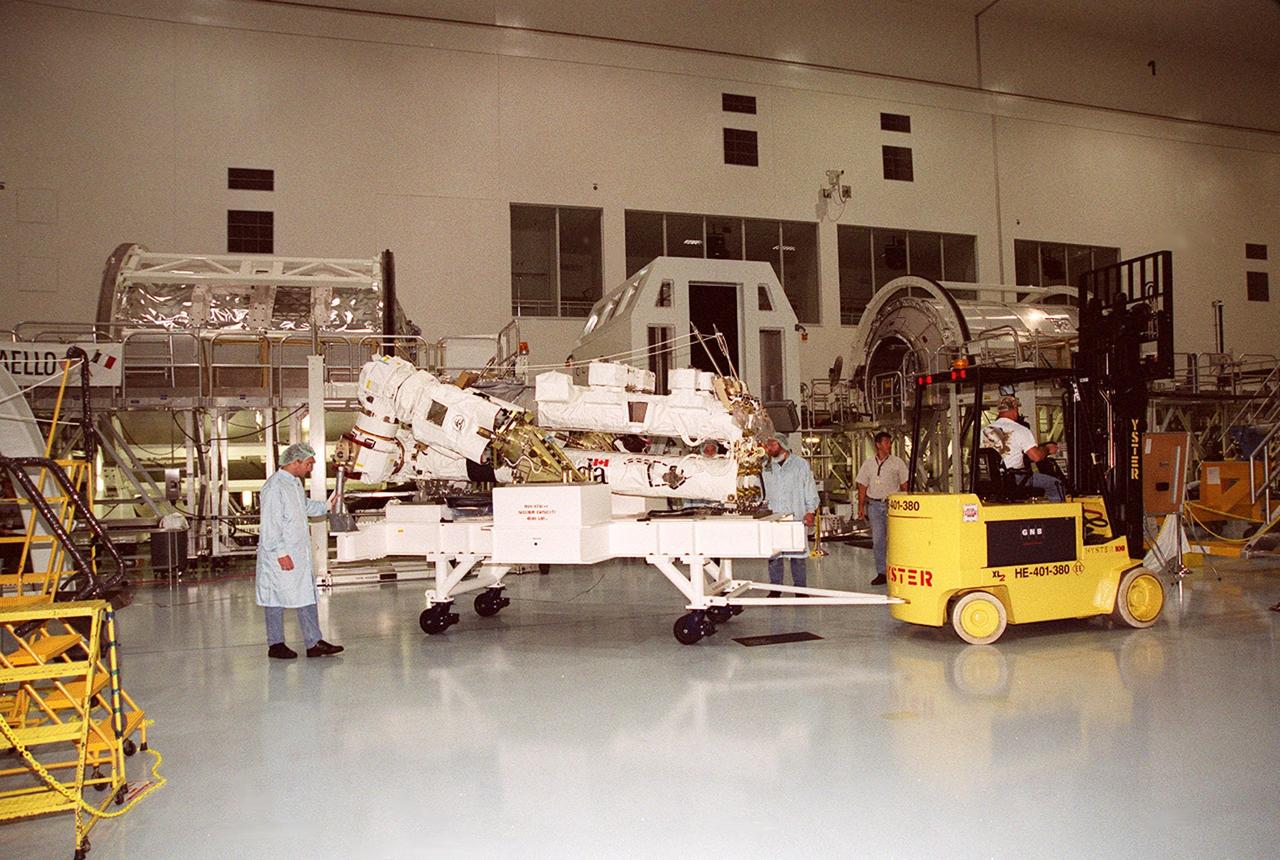
Workers guide a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) past the Leonardo Multi-Purpose Logistics Module in the Space Station Processing Facility at KSC. The segment joins two others for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

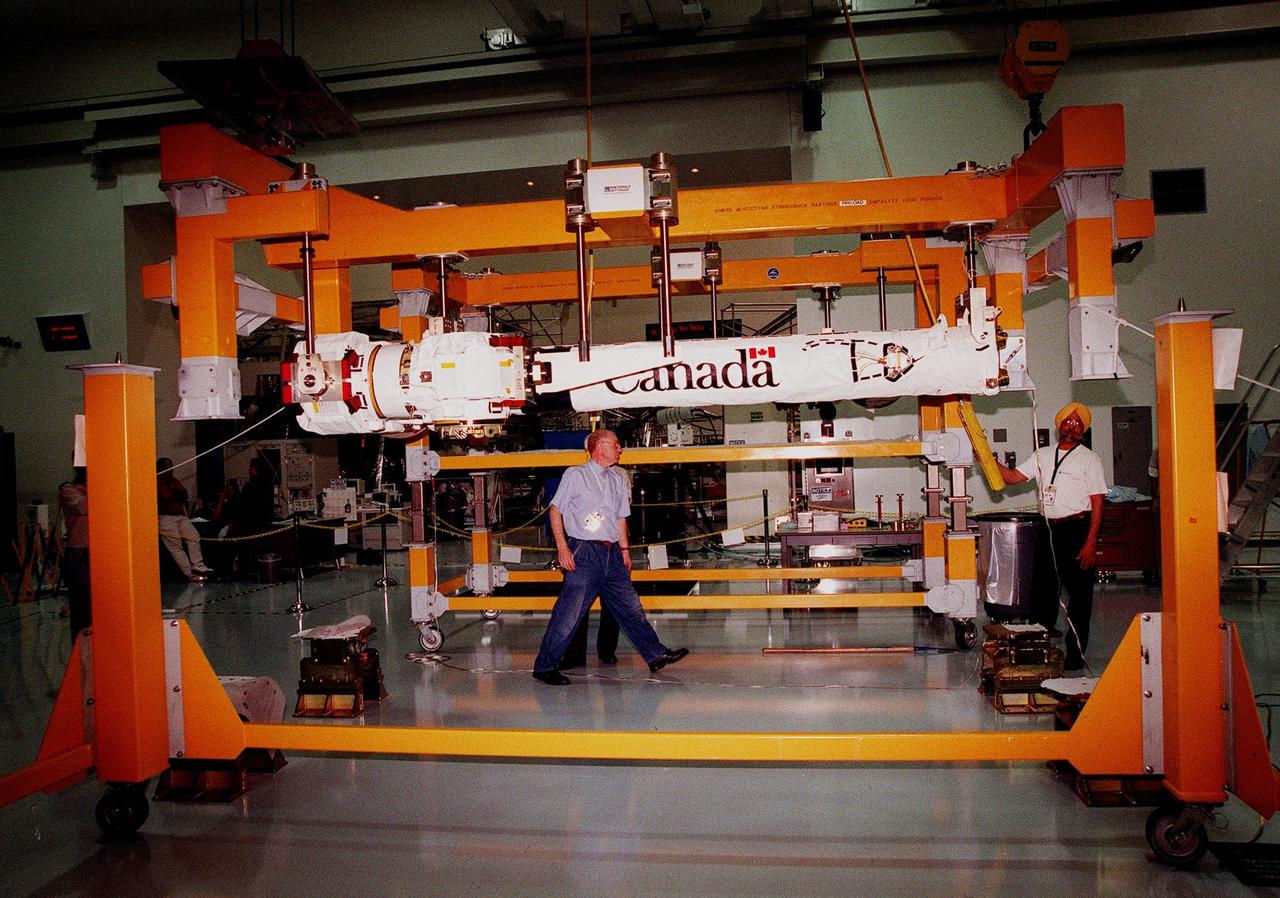
In the Space Station Processing Facility, two workers perform prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

Workers in the in the Space Station Processing Facility move two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement.. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at the Space Station Processing Facility at KSC to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
Segments of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) are lined up in the Space Station Processing Facility at KSC. They will undergo a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
Workers guide a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) in the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
Workers in the Space Station Processing Facility raise a segment of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS) to move it to a workstand. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000

In the Space Station Processing Facility, a worker performs prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

In the Space Station Processing Facility, workers perform prelaunch processing activities on the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for April 2001

The Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) arrives at the Space Station Processing Facility at KSC to begin a campaign of prelaunch processing activities. CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000
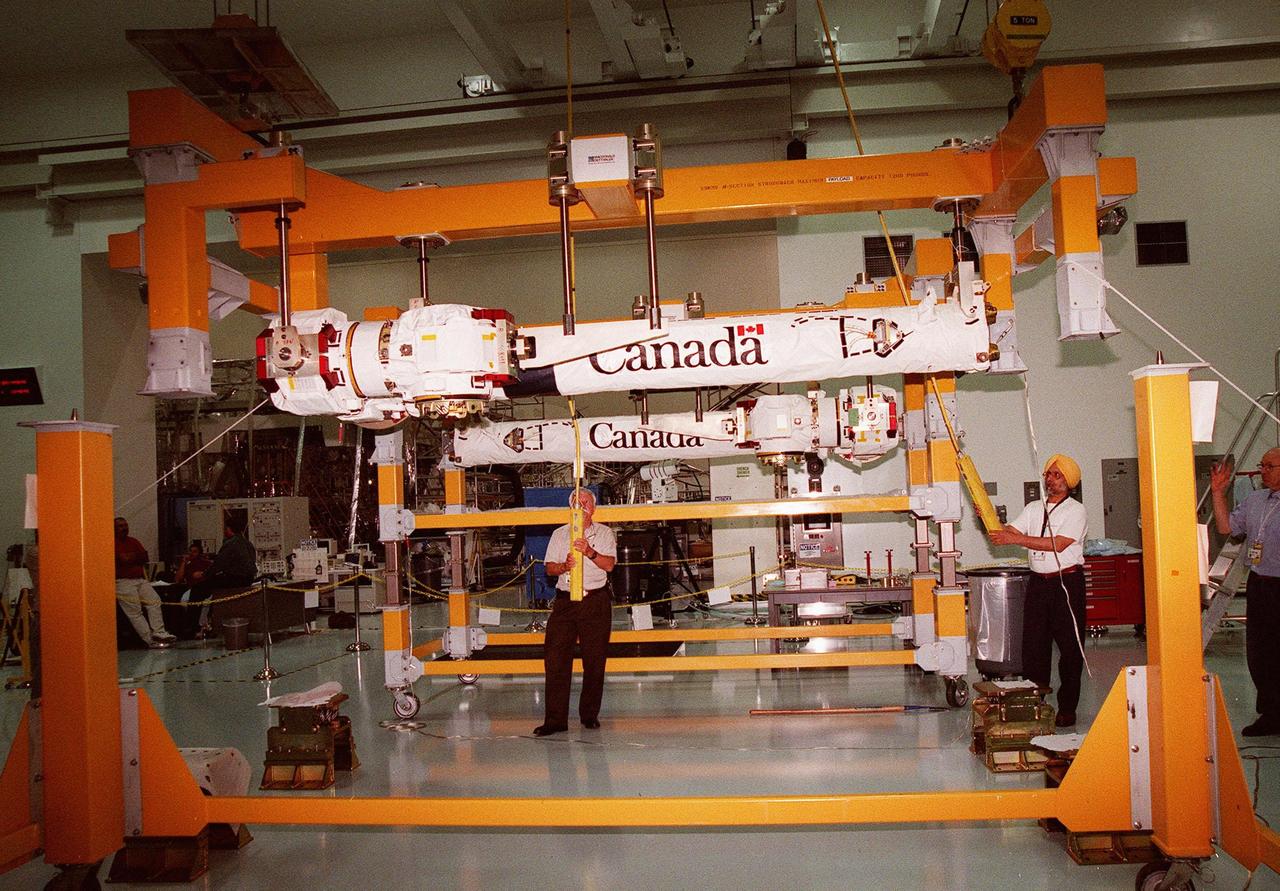
Workers in the Space Station Processing Facility raise two segments of the Canadian Space Agency's Space Station Remote Manipulator System (SSRMS). CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is at KSC to begin a campaign of prelaunch processing activities. It is scheduled to be launched aboard Space Shuttle Endeavour on mission STS-100, currently planned for July 2000

Workers move a box containing a segment of the Canadian Space Agency's (CSA) Space Station Remote Manipulator System (SSRMS) into the Space Station Processing Facility at KSC. It joins two other segments for a campaign of prelaunch processing activities CSA's first contribution to the International Space Station (ISS), the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the ISS for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Latching End Effectors are mounted on each end of the arm for grappling. Video cameras mounted on the booms and end effectors will give astronauts maximum visibility for operations and maintenance tasks on the ISS. The SSRMS is scheduled to be launched aboard Space Shuttle Endeavour on STS-100, currently planned for July 2000

Workers (center) in the Space Station Processing Facility, explain use of video cameras to members of the STS-100 crew (far left and far right) during Crew Equipment Interface Test activities. The cameras will be mounted on the booms and end effectors of the Space Station Remote Manipulator System (SSRMS), also known as the Canadian arm, and will give astronauts maximum visibility for operations and maintenance tasks on the International Space Station. Part of the payload on mission STS-100, the SSRMS is the primary means of transferring payloads between the orbiter payload bay and the International Space Station for assembly. The 56-foot-long robotic arm includes two 12-foot booms joined by a hinge. Seven joints on the arm allow highly flexible and precise movement. Mission STS-100 is scheduled to launch April 19, 2001

STS057-32-008 (25 June 1993) --- Astronaut G. David Low (nearer camera), his feet anchored to Endeavour's Remote Manipulator System (RMS), lifts fellow astronaut Peter J. K. (Jeff) Wisoff during a special phase of the lengthy June 25, 1993, extravehicular activity (EVA). This phase of the EVA dealt with the simulation of handling large components in space. This particular task was rehearsed with eyes toward the servicing of the Hubble Space Telescope (HST) in the near future or the assembly and maintenance of the International Space Station later. The two mission specialists and four other NASA astronauts spent almost ten days aboard the Space Shuttle Endeavour in Earth-orbit supporting the SPACEHAB mission, retrieving the European Retrievable Carrier (EURECA) and conducting various experiments.

CAPE CANAVERAL, Fla. - In the Remote Manipulator System Lab inside the Vehicle Assembly Building at NASA's Kennedy Space Center in Florida, space shuttle Atlantis' orbiter boom sensor system, or OBSS, is prepared for maintenance. The 50-foot-long OBSS attaches to the end of the shuttle’s robotic arm and supports the cameras and laser systems used to inspect the shuttle’s thermal protection system while in space. Atlantis is next slated to deliver an Integrated Cargo Carrier and Russian-built Mini Research Module to the International Space Station on the STS-132 mission. The second in a series of new pressurized components for Russia, the module will be permanently attached to the Zarya module. Three spacewalks are planned to store spare components outside the station, including six spare batteries, a boom assembly for the Ku-band antenna and spares for the Canadian Dextre robotic arm extension. A radiator, airlock and European robotic arm for the Russian Multi-purpose Laboratory Module also are payloads on the flight. Launch is targeted for May 14, 2010. Photo credit: NASA/Jack Pfaller