
41C-37-1711 (11 April 1984) --- The two mission specialist-EVA participants of Flight 41-C share a repair task at the "captured" Solar Maximum Mission Satellite (SMMS) in the aft end of the Challenger's cargo bay. Astronauts George D. Nelson, right, and James D. van Hoften uses the mobile foot restraint and the Remote Manipulator System (RMS) as a "cherry picker" device for moving about. Later, the RMS lifted the SMMS into space once more.

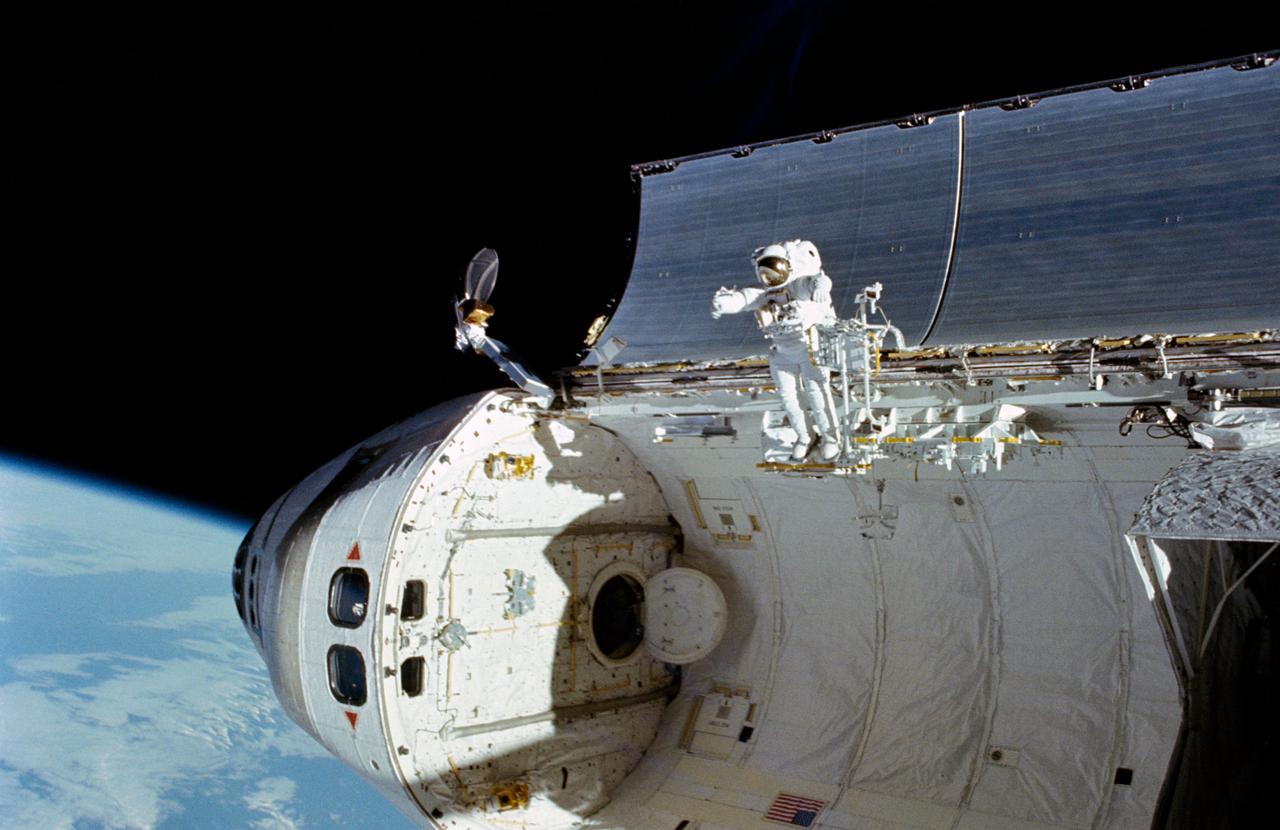
41C-52-2646 (11 April 1984) --- Astronaut James D. van Hoften and a repaired satellite are in a wide panorama recorded on film with a Linhof camera, making its initial flight aboard the Space Shuttle Challenger. Dr. van Hoften is getting in his first "field" test of the Manned Maneuvering Unit (MMU) after months of training in an underwater facility and in a simulator on Earth. The Solar Maximum Mission Satellite (SMMS), revived and almost ready for release into space once more, is docked at the Flight Support System (FSS). The Remote Manipulator System (RMS) is backdropped against the blue and white Earth at frame's edge. Outside of pictures made of the Earth from astronauts on the way to the Moon, this frame showing the planet from 285 nautical miles represents the highest orbital photography in the manned space program.
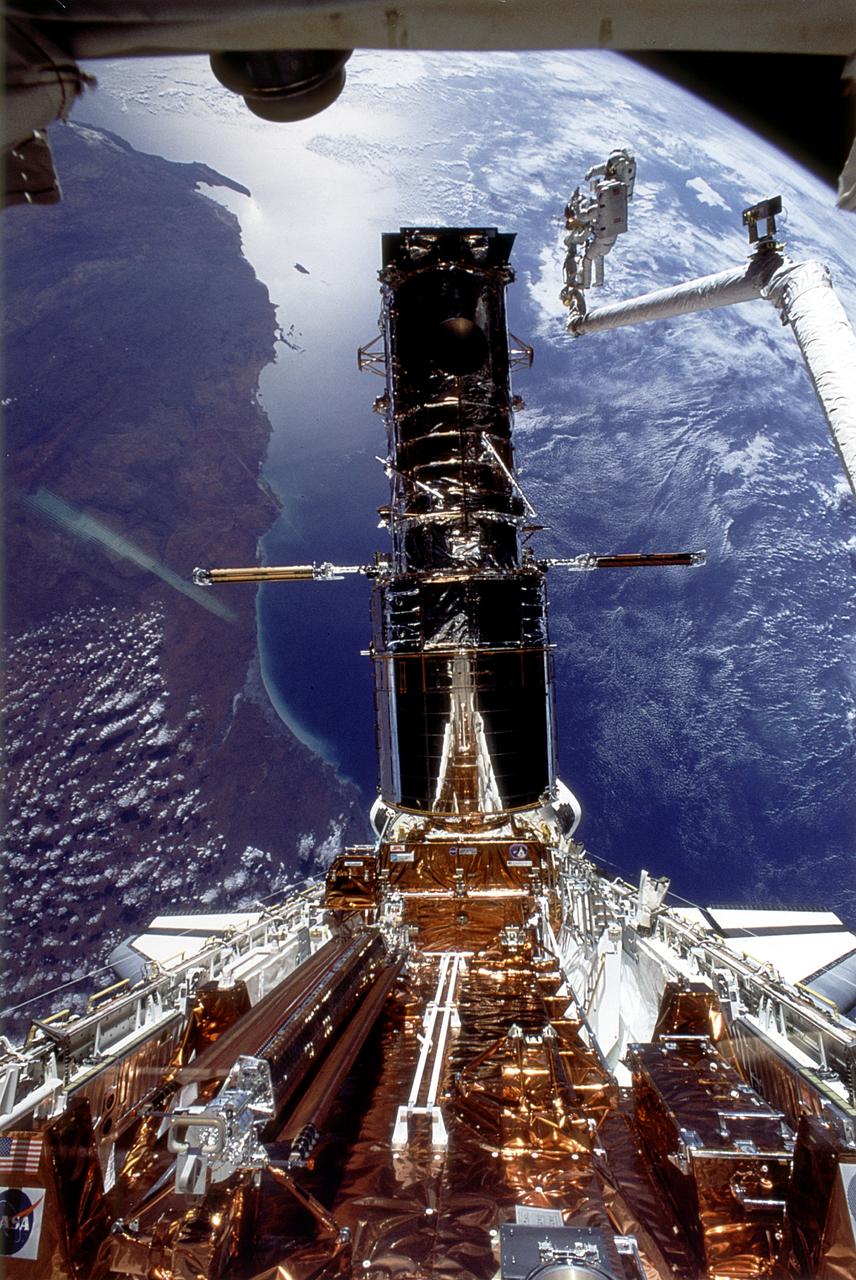
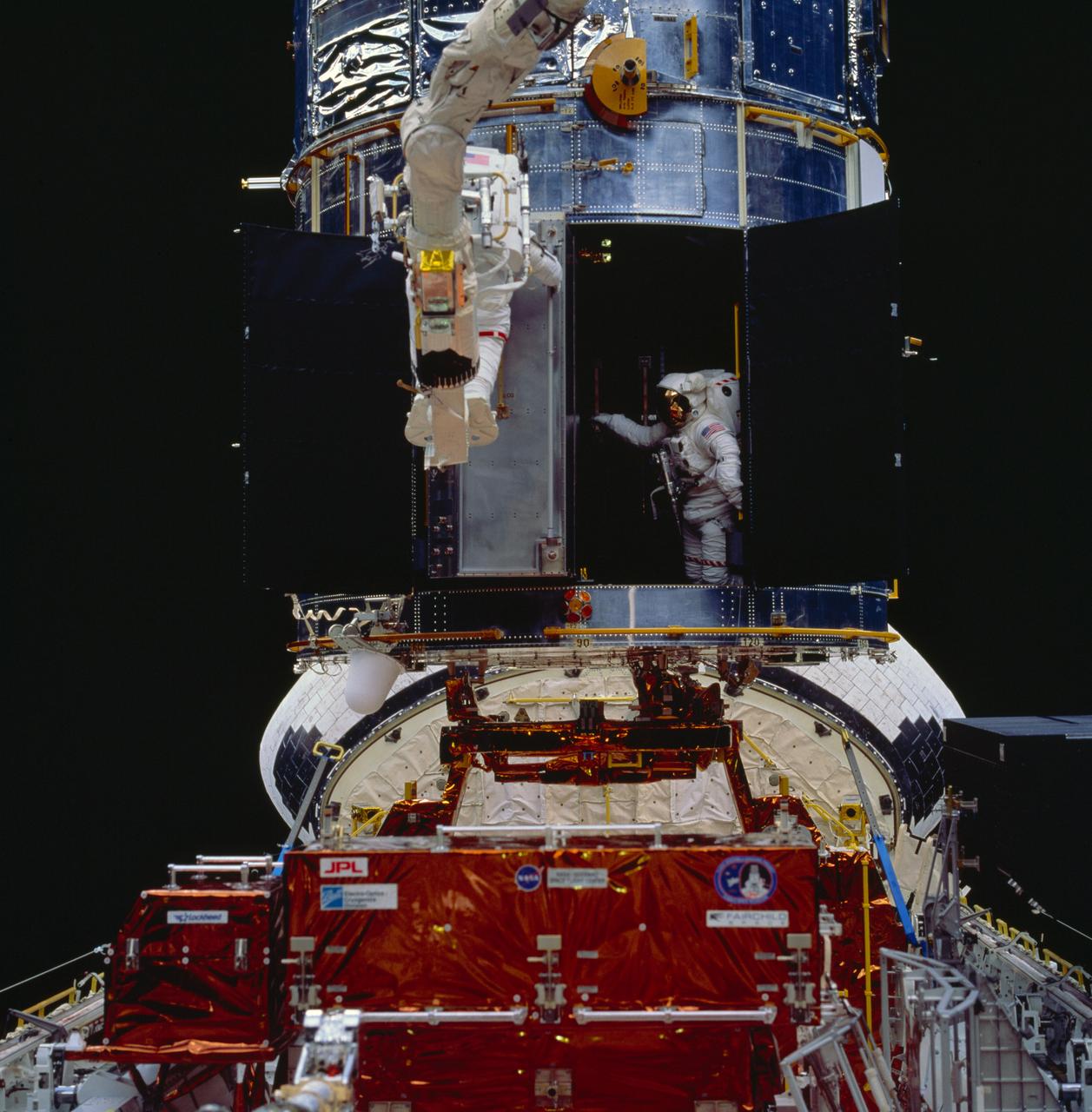
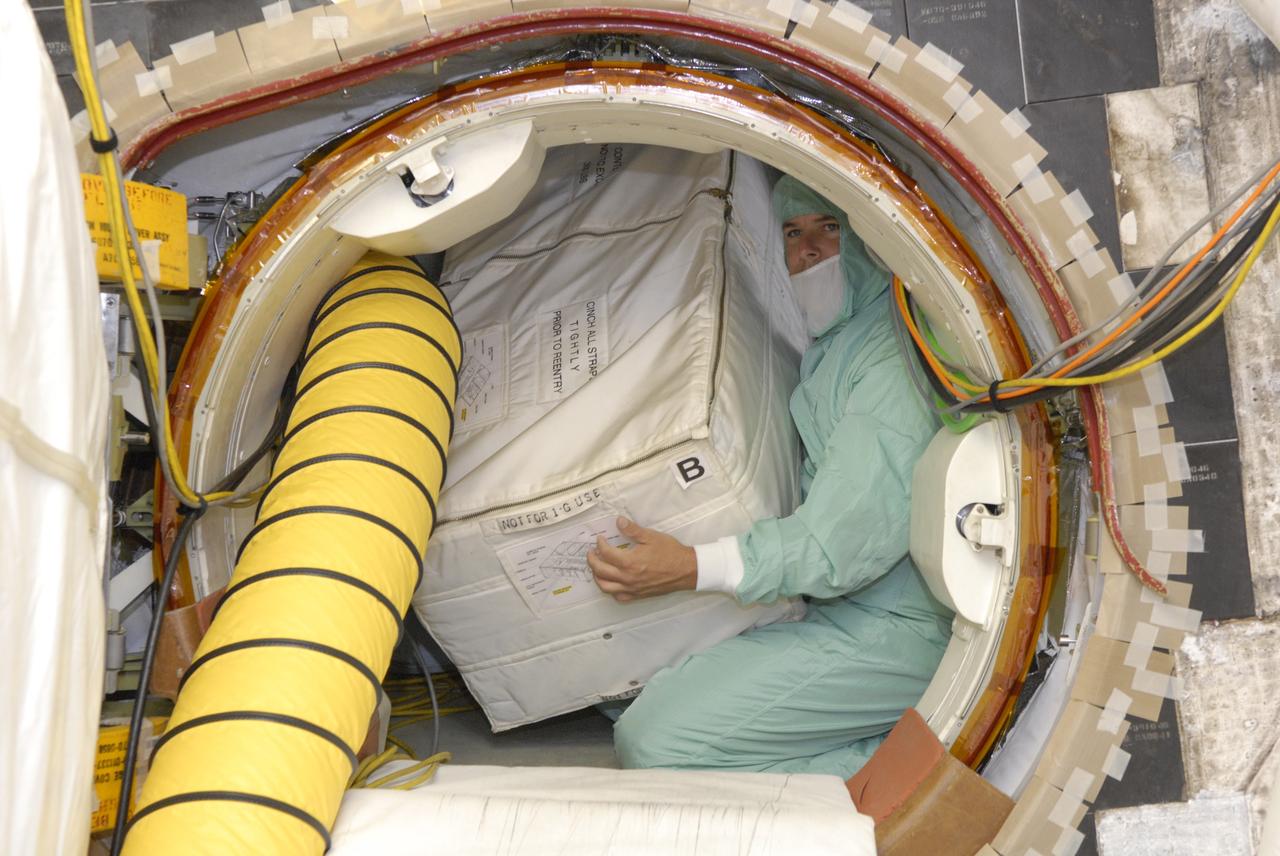
Repair of the Hubble Space Telescope (HST) - orbiting earth at an altitude of 325 nautical miles. Perched atop a foot restraint on shuttle Endeavour's remote manipulator system arm, astronauts Story Musgrave and Jeffrey Hoffman wrap up the final of five space walks.
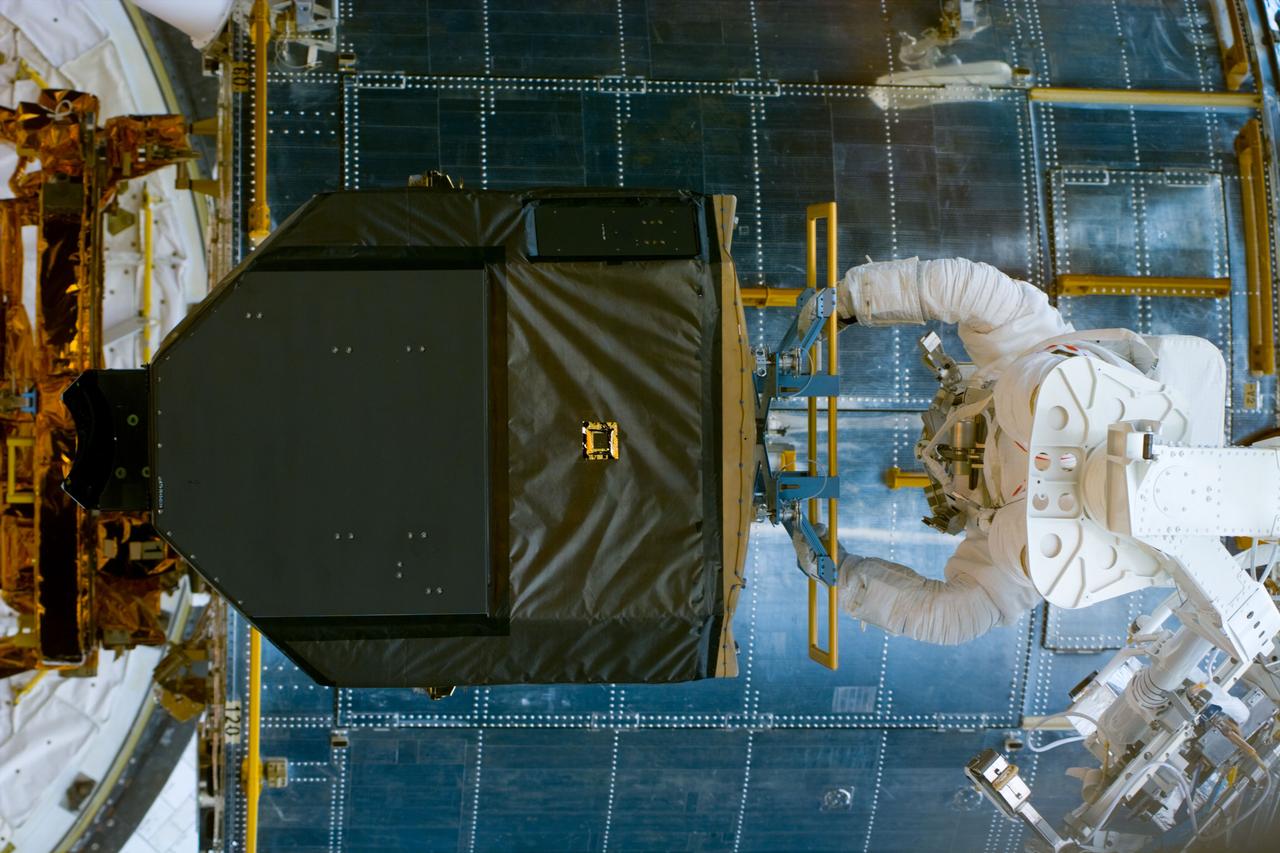
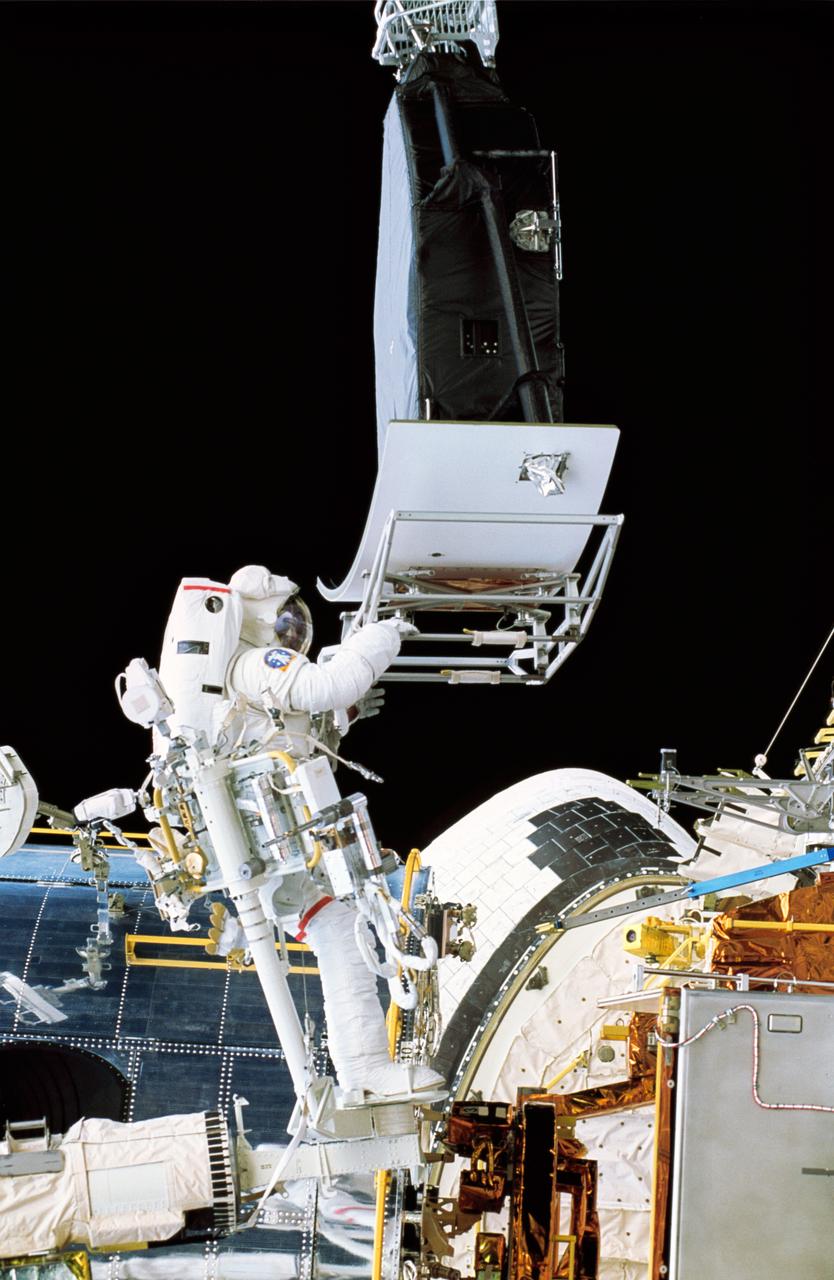
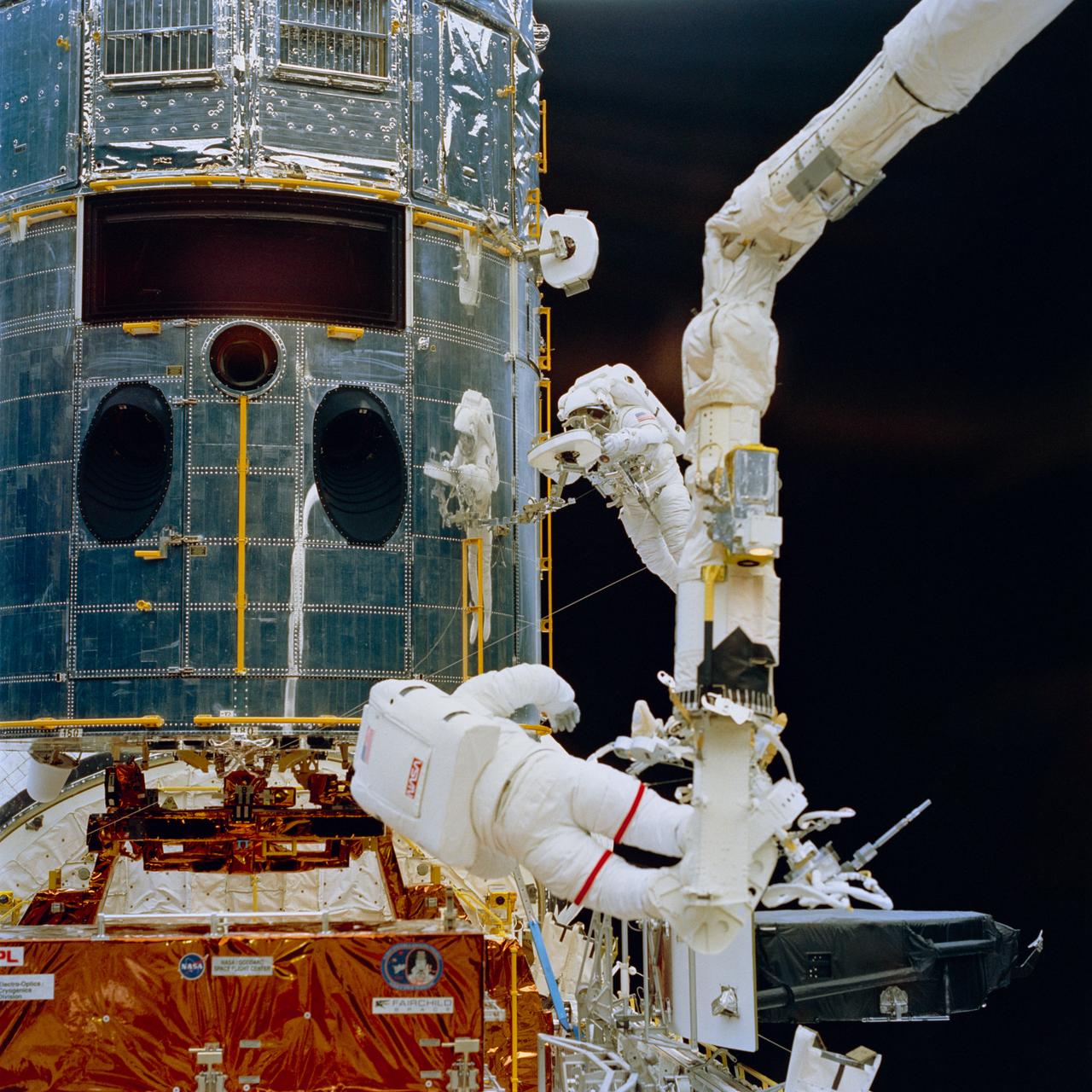
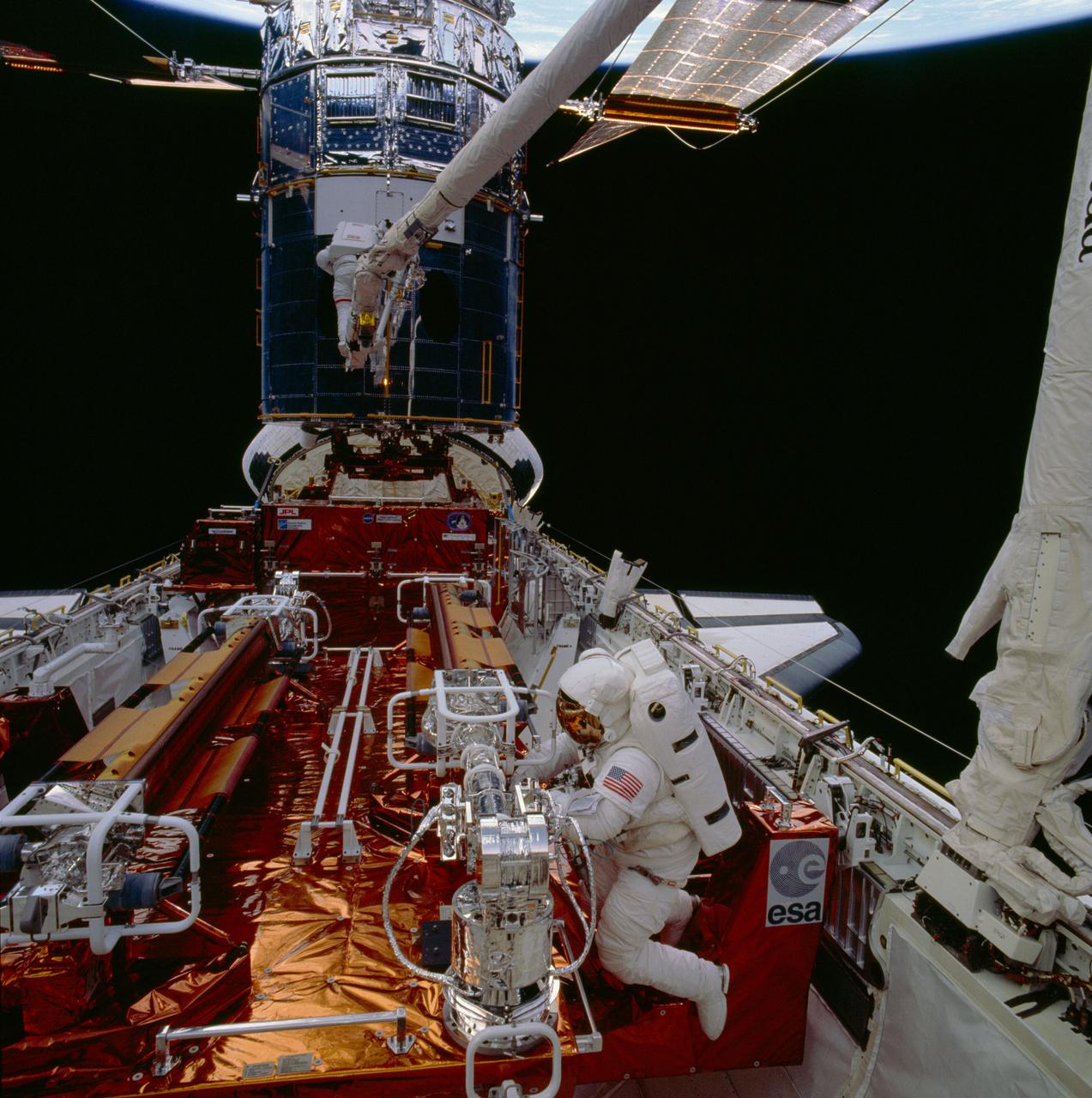
S82-E-5404 (15 Feb. 1997) --- Astronaut Gregory J. Harbaugh on the Remote Manipulator System (RMS) with the Fine Guidance Sensor (FGS), during the repair of the Hubble Space Telescope (HST). This view was taken with an Electronic Still Camera (ESC).
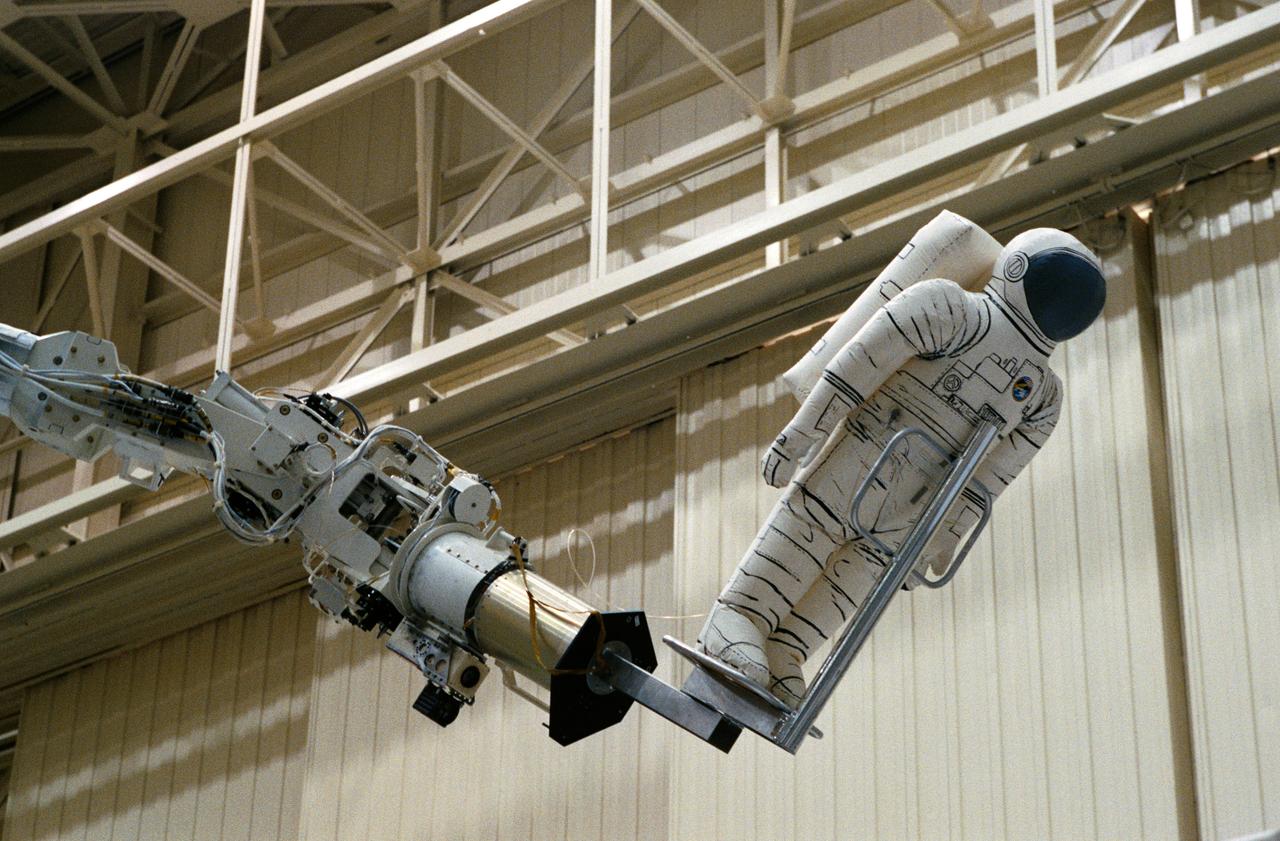
The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

STS061-95-028 (6 Dec 1993) --- Astronaut Kathryn C. Thornton, on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST) during the second extravehicular activity (EVA) on the eleven-day mission. Astronauts Thornton and Thomas D. Akers changed out the solar array panels during this EVA.

STS061-07-003 (4 Dec 1993) --- Swiss astronaut Claude Nicollier is pictured at the aft flight deck station he occupied during much of the time on NASA's STS-61 mission aboard the Space Shuttle Endeavour. Among Nicollier's responsibilities were the control of the Remote Manipulator System (RMS) during operations with the Hubble Space Telescope (HST).

ISS015-E-12952 (15 June 2007) --- Anchored to a foot restraint on Space Shuttle Atlantis' remote manipulator system (RMS) robotic arm, astronaut John "Danny" Olivas, STS-117 mission specialist, repairs a 4-by-6-inch section of a thermal blanket on Atlantis' port orbital maneuvering system (OMS) pod that was damaged during the shuttle's climb to orbit last week. During the repair, Olivas pushed the turned up portion of the thermal blanket back into position, used a medical stapler to secure the layers of the blanket, and pinned it in place against adjacent thermal tile.
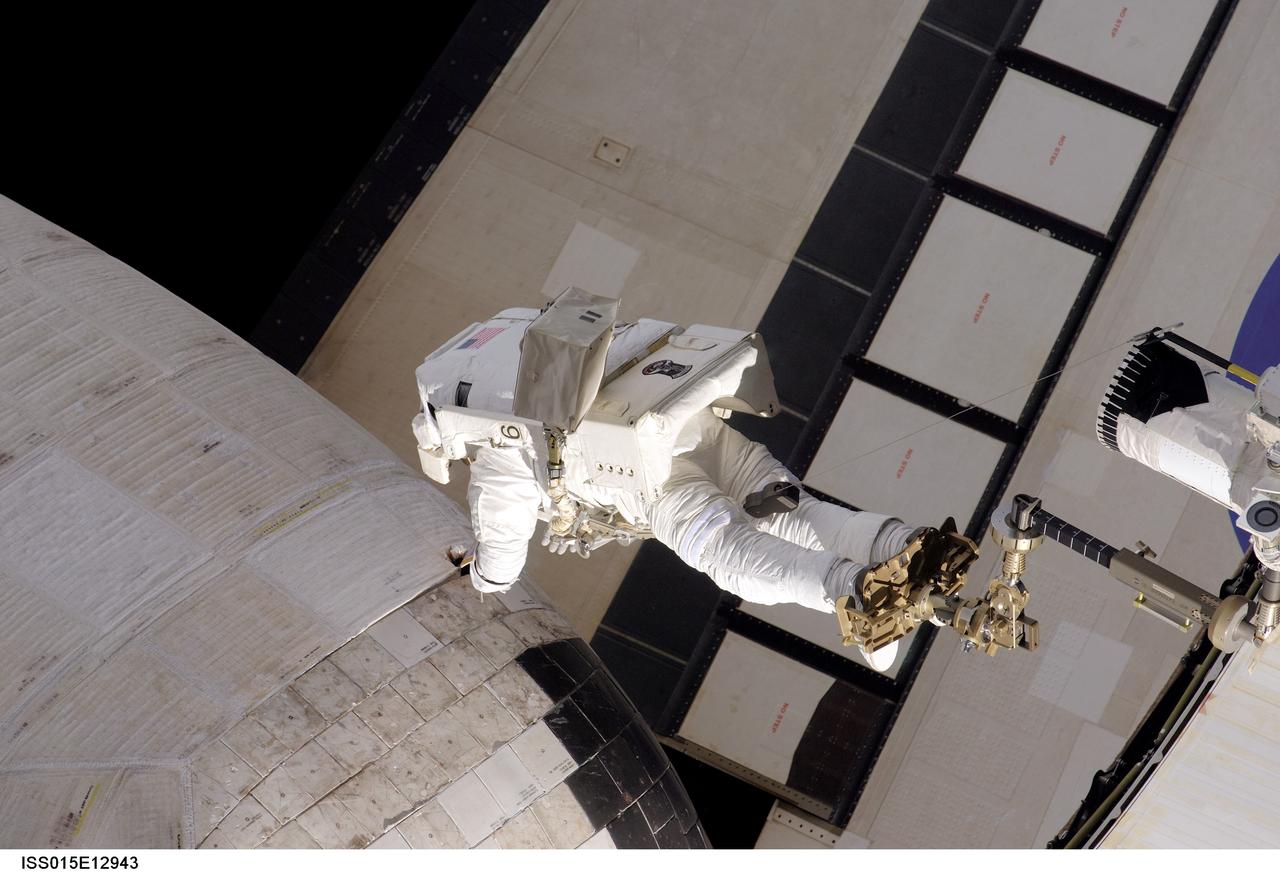
ISS015-E-12943 (15 June 2007) --- Anchored to a foot restraint on Space Shuttle Atlantis' remote manipulator system (RMS) robotic arm, astronaut John "Danny" Olivas, STS-117 mission specialist, repairs a 4-by-6-inch section of a thermal blanket on Atlantis' port orbital maneuvering system (OMS) pod that was damaged during the shuttle's climb to orbit last week. During the repair, Olivas pushed the turned up portion of the thermal blanket back into position, used a medical stapler to secure the layers of the blanket, and pinned it in place against adjacent thermal tile.
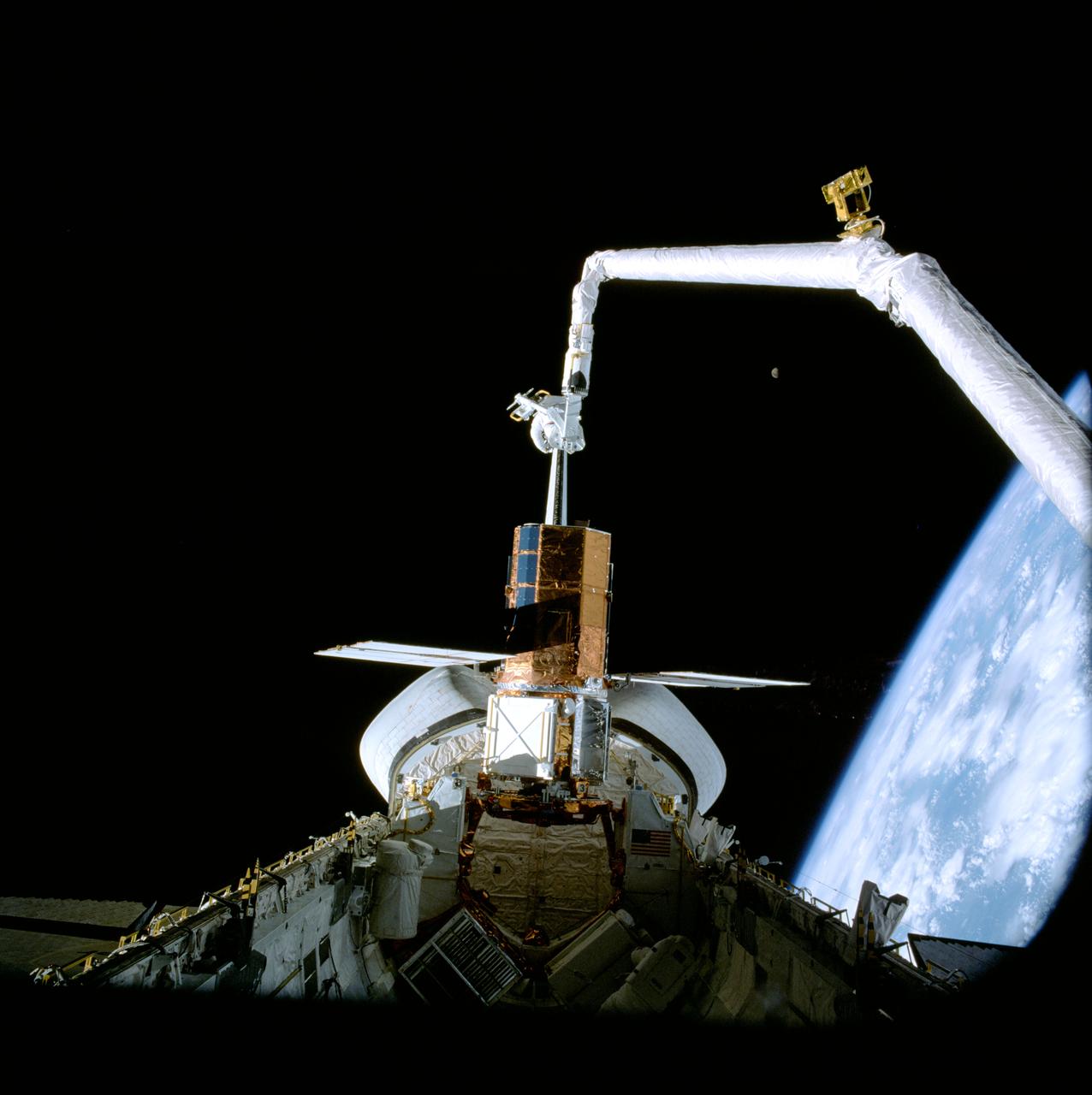
41C-37-1715 (11 April 1984) --- A scenic panorama is captured by an onboard 70mm handheld camera during the April 11, 1984, Solar Maximum Mission Satellite (SMMS) repair job aboard the Earth-orbiting Space Shuttle Challenger. The SMMS is temporarily docked at the Challenger's Flight Support System (FSS) so that astronauts George D. Nelson and James D. van Hoften could perform a series of repair tasks. The Remote Manipulator System (RMS) arm was used to move the astronauts into position for their series of chores. Note the gibbous Moon to the right of center and the horizon of the blue and white Earth in the lower right quadrant.
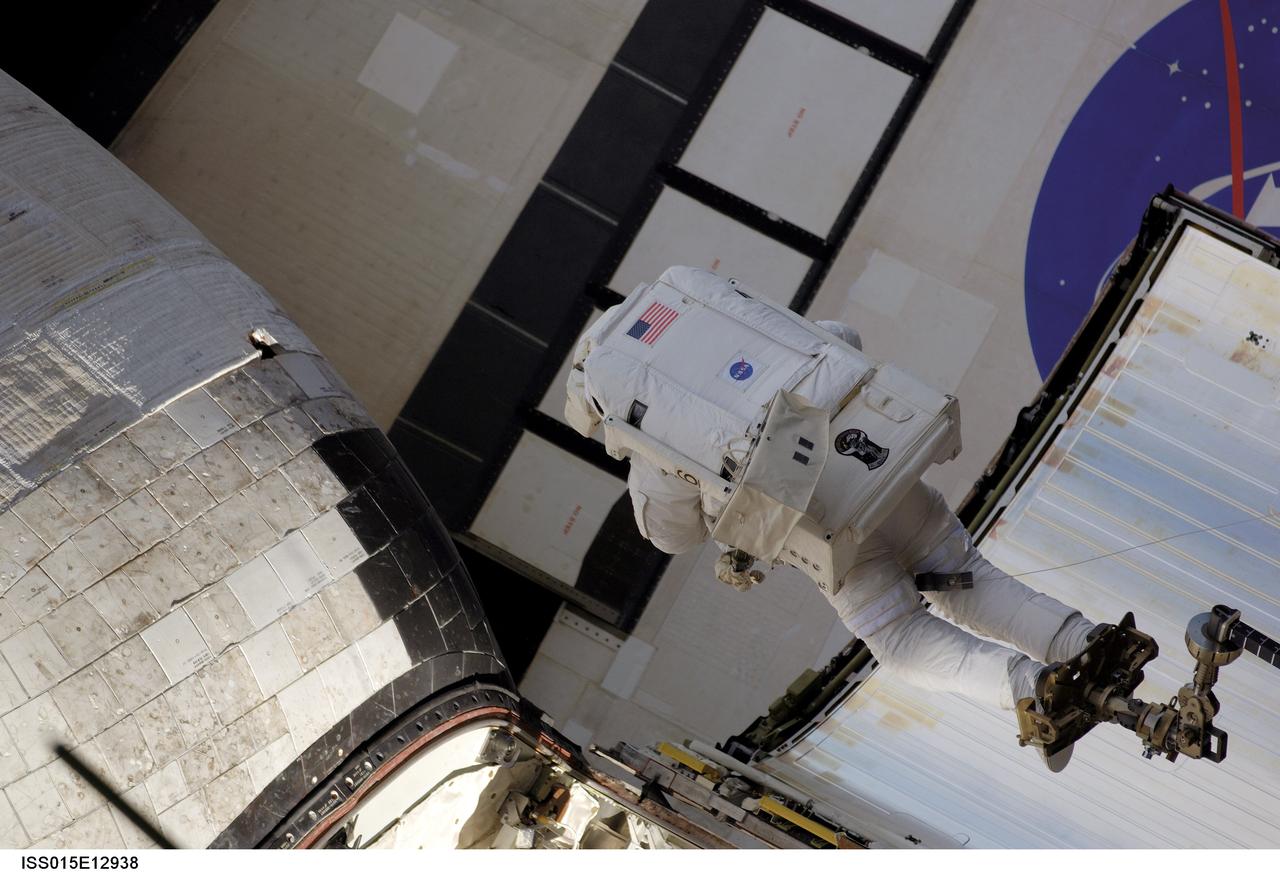
ISS015-E-12938 (15 June 2007) --- Anchored to a foot restraint on Space Shuttle Atlantis' remote manipulator system (RMS) robotic arm, astronaut John "Danny" Olivas, STS-117 mission specialist, moves toward Atlantis' port orbital maneuvering system (OMS) pod that was damaged during the shuttle's climb to orbit. During the repair, Olivas pushed the turned up portion of the thermal blanket back into position, used a medical stapler to secure the layers of the blanket, and pinned it in place against adjacent thermal tile.

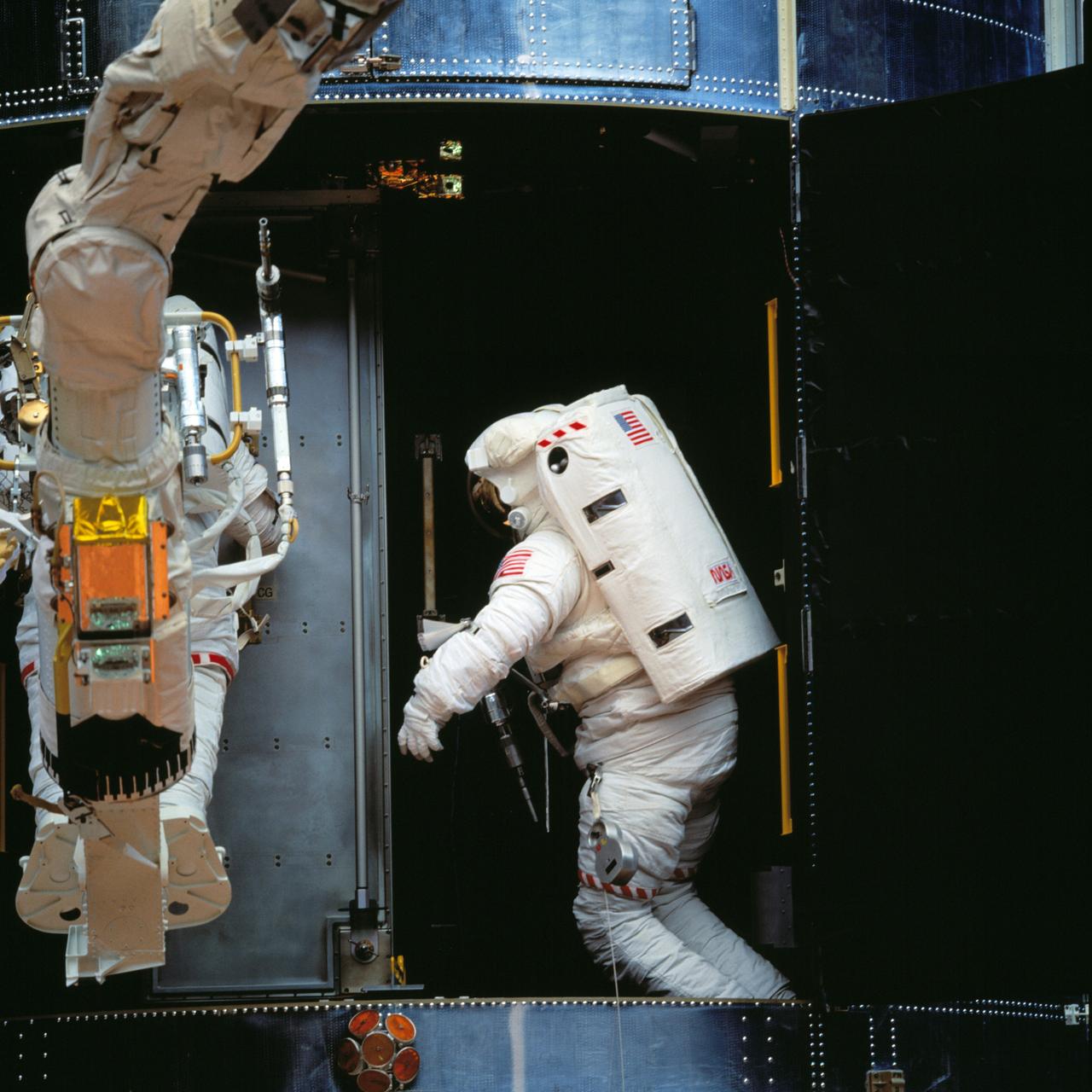
Preparing for the eventual launch of the Hubble Space Telescope (HST), an astronaut prepares himself for the rigorous duties of maintenance and repairs after launch, at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS). The NBS provided mock-ups of the HST, the Remote Manipulator System (RMS), the orbiter's cargo bay, and the low-gravity environment that the astronauts would encounter while working in space. All aspects of shuttle missions were pre-plarned and practiced at the NBS to forego any problems in space.
STS061-94-050 (8 Dec 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR, during their extravehicular activity (EVA).

STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.

STS061-95-031 (6 Dec 1993) --- The damaged solar array panel removed from the Hubble Space Telescope (HST) is backdropped over northern Sudan. Astronaut Kathryn C. Thornton, just out of frame at top right, watched the panel after releasing it moments earlier.
STS061-37-011 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman with Wide Field/Planetary Camera (WF/PC 1) during changeout operations. WF/PC-2 has already been installed in cavity (out of frame). Astronauts Hoffman and Story Musgrave are performing Extravehicular Activities (EVA) to repair the Hubble Space Telescope (HST).
STS061-74-046 (7 Dec 1993) --- Anchored on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman (foreground) prepares to install the new Wide Field\Planetary Camera (WFPC II) into the empty cavity (top left) on the Hubble Space Telescope (HST). WFPC I is seen temporarily stowed at bottom right. Astronaut F. Story Musgrave works with a Portable Foot Restraint (PFR) at frame center, as his image is reflected in the shiny surface of the telescope. Hoffman and Musgrave shared chores on three of the five extravehicular activity?s (EVA) during the mission.
51I-S-237 (1 Sept. 1985) --- A still photo made from a video downlink shows astronaut James D. van Hoften, just after giving a shove to the Syncom IV-3 communications satellite. NASA's 51-I astronaut crew aboard the space shuttle Discovery had earlier captured and repaired the previously errant satellite. Photo credit: NASA

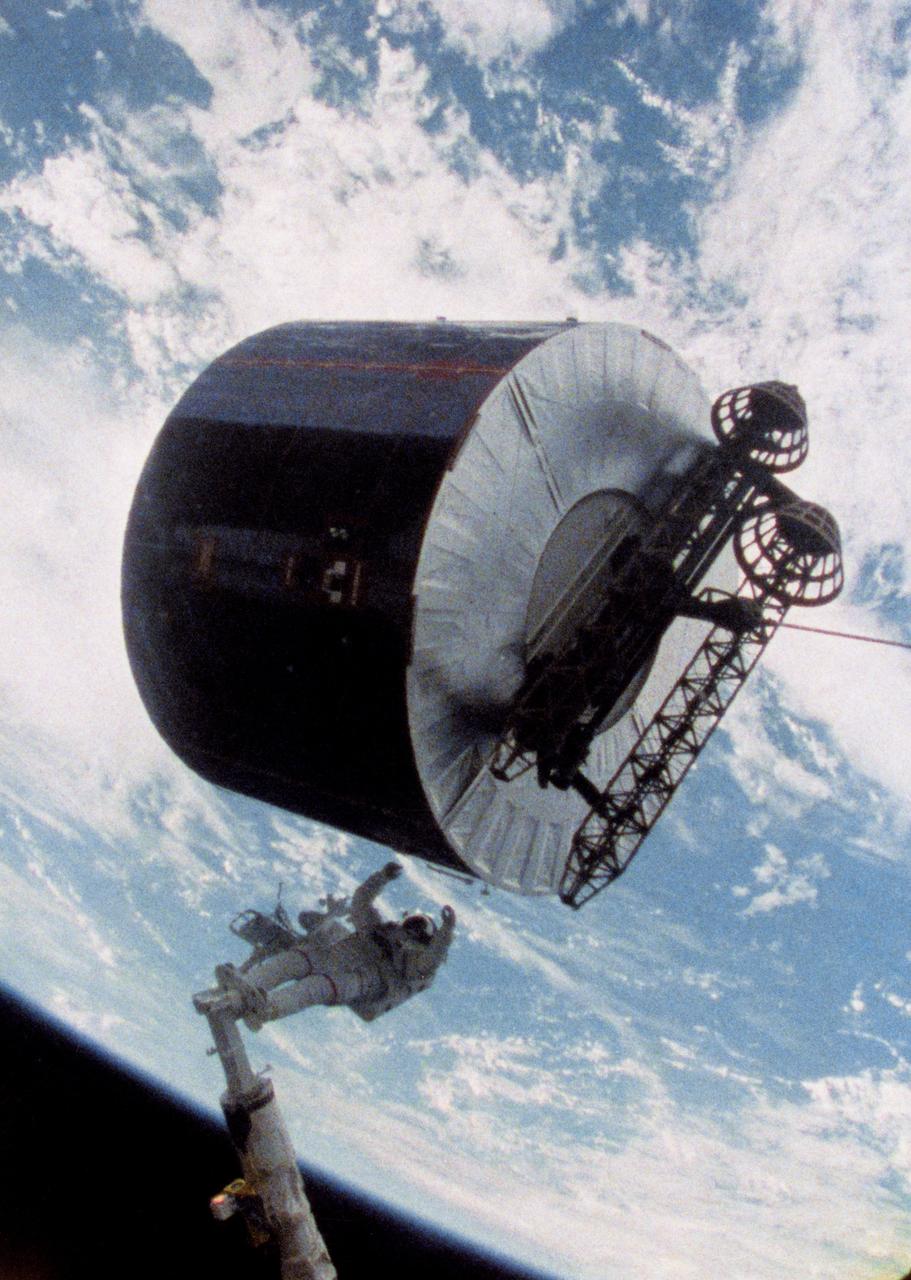
51I-44-014 (31 Aug-1 Sept. 1985) --- This photograph is one of a series of six covering extravehicular activity (EVA) which were released by NASA on Sept. 4, 1985. Here, astronaut James D. van Hoften, dwarfed by the large satellite, moves in for initial contact. Astronaut John M. (Mike) Lounge, out of frame inside cabin, maneuvers the remote manipulator system (RMS) arm to assist astronauts van Hoften and William F. Fisher. Photo credit: NASA

51A-104-008 (14 Nov 1984) --- Astronaut Dale A. Gardner appears to be under the remote manipulator system (RMS) end effector as he makes a turn in space and prepared to traverse, using the manned maneuvering unit (MMU) backpack, to the nearby Westar VI to "Sting" it with the device he carries. The stringer will enter the communications satellite through the nozzle of the spent motor. Gardner achieved a hard dock at 6:32 A.M. and this picture was photographed about five minutes earlier, on Nov. 14, 1984.

STS061-48-027 (9 Dec 1993) --- Astronaut F. Story Musgrave moves about in the Space Shuttle Endeavour's cargo bay during the deployment of the solar array panels on the Hubble Space Telescope (HST) during the final of five STS-61 space walks. The left hand of astronaut Jeffrey A. Hoffman appears at lower left corner.
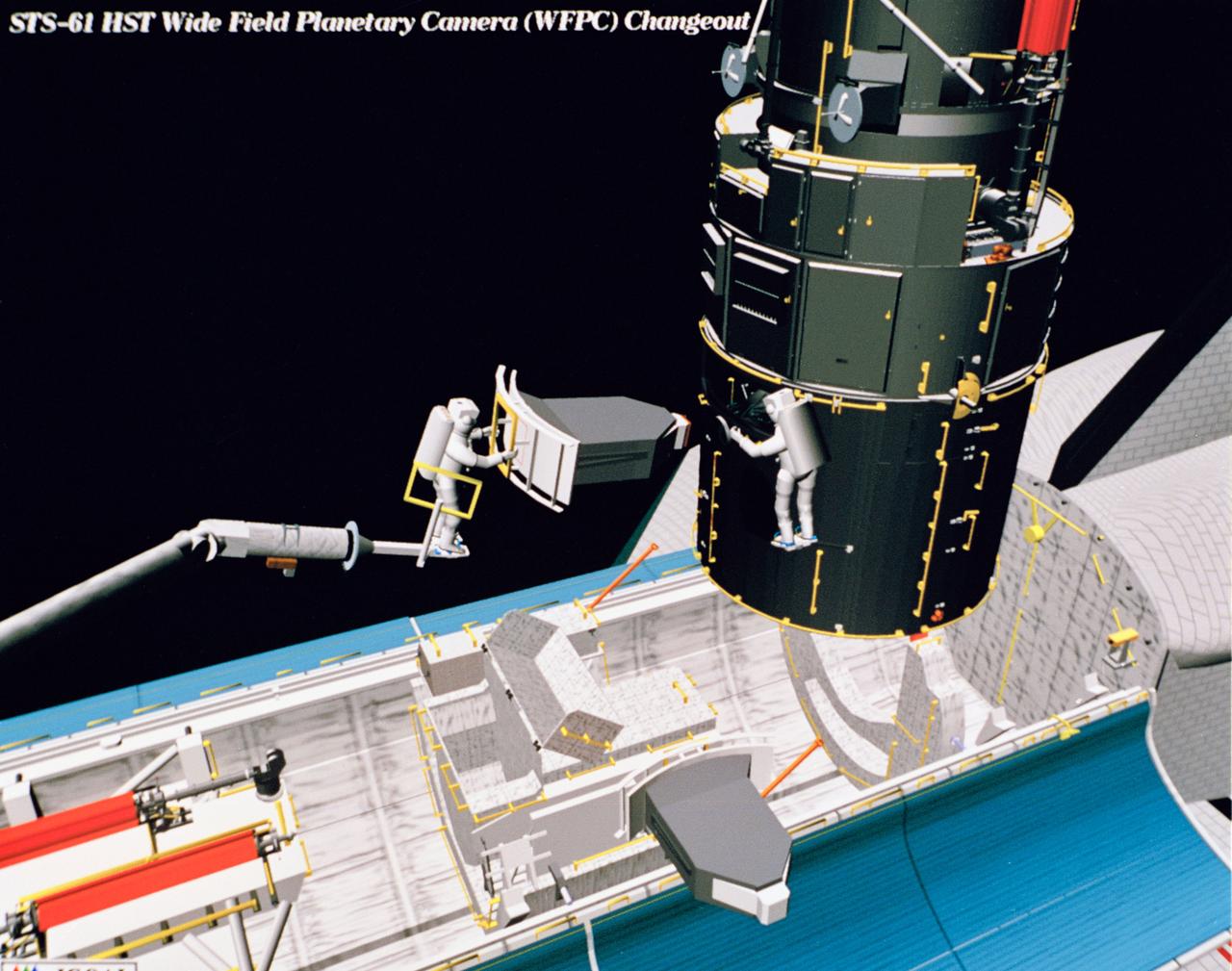
Computer generated scenes depicting the Hubble Space Telescope capture and a sequence of planned events on the planned extravehicular activity (EVA). Scenes include the Remote Manipulator System (RMS) arm assisting two astronauts changing out the Wide Field/Planetary Camera (WF/PC) (48699); RMS arm assisting in the temporary mating of the orbiting telescope to the flight support system in Endeavour's cargo bay (48700); Endeavour's RMS arm assisting in the "capture" of the orbiting telescope (48701); Two astronauts changing out the telescope's coprocessor (48702); RMS arm assistign two astronauts replacing one of the telescope's electronic control units (48703); RMS assisting two astronauts replacing the fuse plugs on the telescope's Power Distribution Unit (PDU) (48704); The telescope's High Resolution Spectrograph (HRS) kit is depicted in this scene (48705); Two astronauts during the removal of the high speed photometer and the installation of the COSTAR instrument (48706); Two astronauts, standing on the RMS, during installation of one of the Magnetic Sensing System (MSS) (48707); High angle view of the orbiting Space Shuttle Endeavour with its cargo bay doors open, revealing the bay's pre-capture configuration. Seen are, from the left, the Solar Array Carrier, the ORU Carrier and the flight support system (48708); Two astronauts performing the replacement of HST's Rate Sensor Units (RSU) (48709); The RMS arm assisting two astronauts with the replacement of the telescope's solar array panels (48710); Two astronauts replacing the telescope's Solar Array Drive Electronics (SADE) (48711).

51I-102-029 (31 August - 1 September 1985) --- This is one of a series of six photographs released by NASA covering the extravehicular activity (EVA) of astronauts James D. van Hoften and William F. Fisher, who helped to capture, repair and release the previously errant Syncom IV-3 communications satellite. Here, Dr. van Hoften has just given a shove to the the Syncom. (For orientation, moon should be in lower right quadrant).

51I-102-033 (31 August - 1 September 1985) --- This is one of a series of six photographs released by NASA covering the extravehicular activity (EVA) of astronauts James D. van Hoften and William F. Fisher, who helped to capture, repair and release the previously errant Syncom IV-3 communications satellite. Here, Dr. van Hoften has just given a shove to the the Syncom. (For orientation, moon should be in lower right quadrant).

Launched April 6, 1984, one of the goals of the STS-41C mission was to repair the damaged free-flying Solar Maximum Mission Satellite (SMMS), or Solar Max. The original plan was to make an excursion out to the SMMS and capture it for necessary repairs. Pictured is Mission Specialist George Nelson approaching the damaged satellite in a capture attempt. This attempted feat was unsuccessful. It was necessary to capture the satellite via the orbiter's Remote Manipulator System (RMS) and secure it into the cargo bay in order to perform the repairs, which included replacing the altitude control system and the coronograph/polarimeter electronics box. The SMMS was originally launched into space via the Delta Rocket in February 1980, with the purpose to provide a means of studying solar flares during the most active part of the current sunspot cycle. Dr. Einar Tandberg-Hanssen of Marshall Space Flight Center's Space Sciences Lab was principal investigator for the Ultraviolet Spectrometer and Polarimeter, one of the seven experiments of the Solar Max.
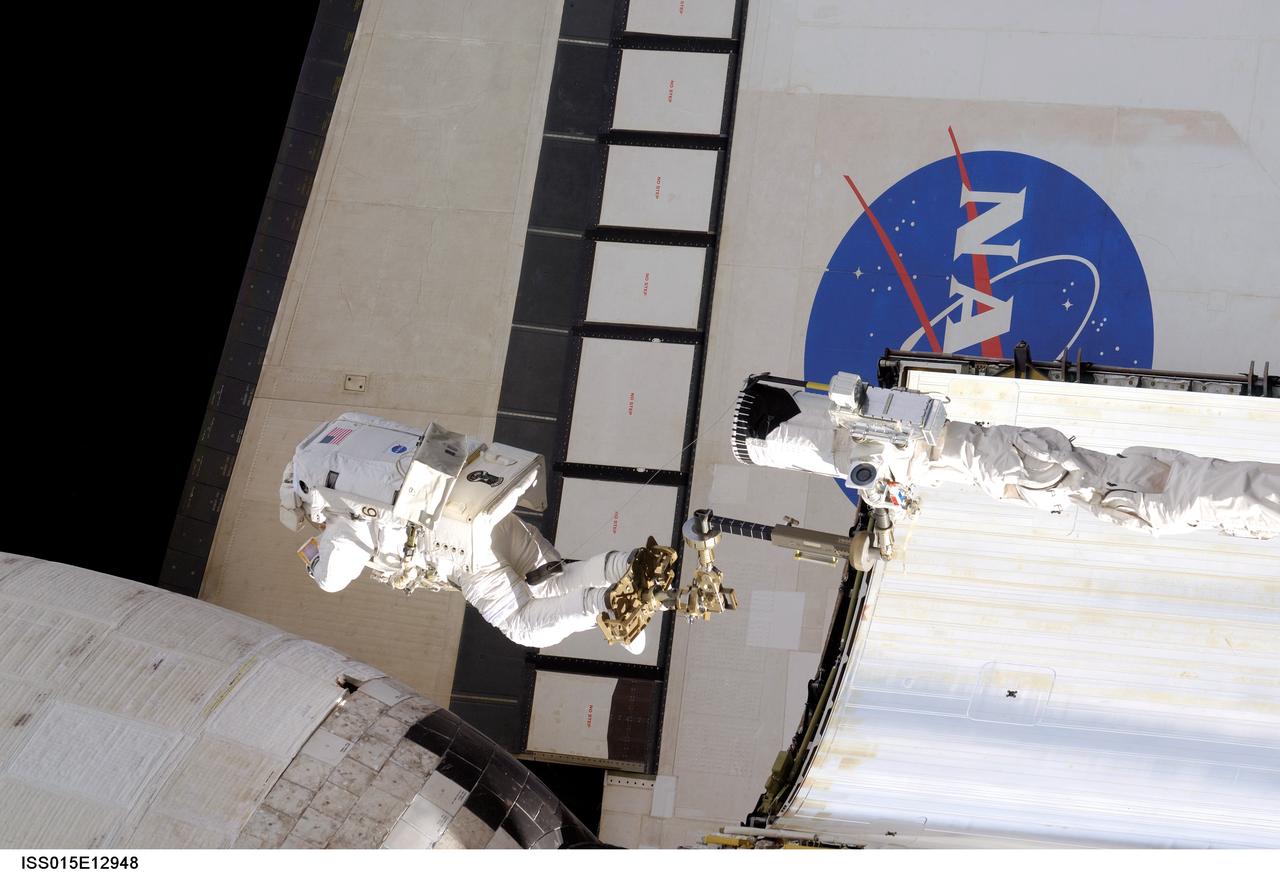
ISS015-E-12948 (15 June 2007) --- Anchored to a foot restraint on Space Shuttle Atlantis' remote manipulator system (RMS) robotic arm, astronaut John "Danny" Olivas, STS-117 mission specialist, moves toward Atlantis' port orbital maneuvering system (OMS) pod that was damaged during the shuttle's climb to orbit last week. During the repair, Olivas pushed the turned up portion of the thermal blanket back into position, used a medical stapler to secure the layers of the blanket, and pinned it in place against adjacent thermal tile.

JSC2005-E-08196 (25 February 2005) --- Astronaut Piers J. Sellers, STS-121 mission specialist, wearing a training version of the Extravehicular Mobility Unit (EMU) space suit, participates in an extravehicular activity (EVA) simulation while anchored on the end of the training version of the space shuttle Remote Manipulator System (RMS) robotic arm in the Space Vehicle Mockup Facility at Johnson Space Center. The RMS has a 50-foot boom, called the Orbiter Boom Sensor System (OBSS), extension attached which would be used to reach underneath the orbiter to access tiles. Lora Bailey (right), Manager, JSC Engineering Tile Repair, assisted Sellers.
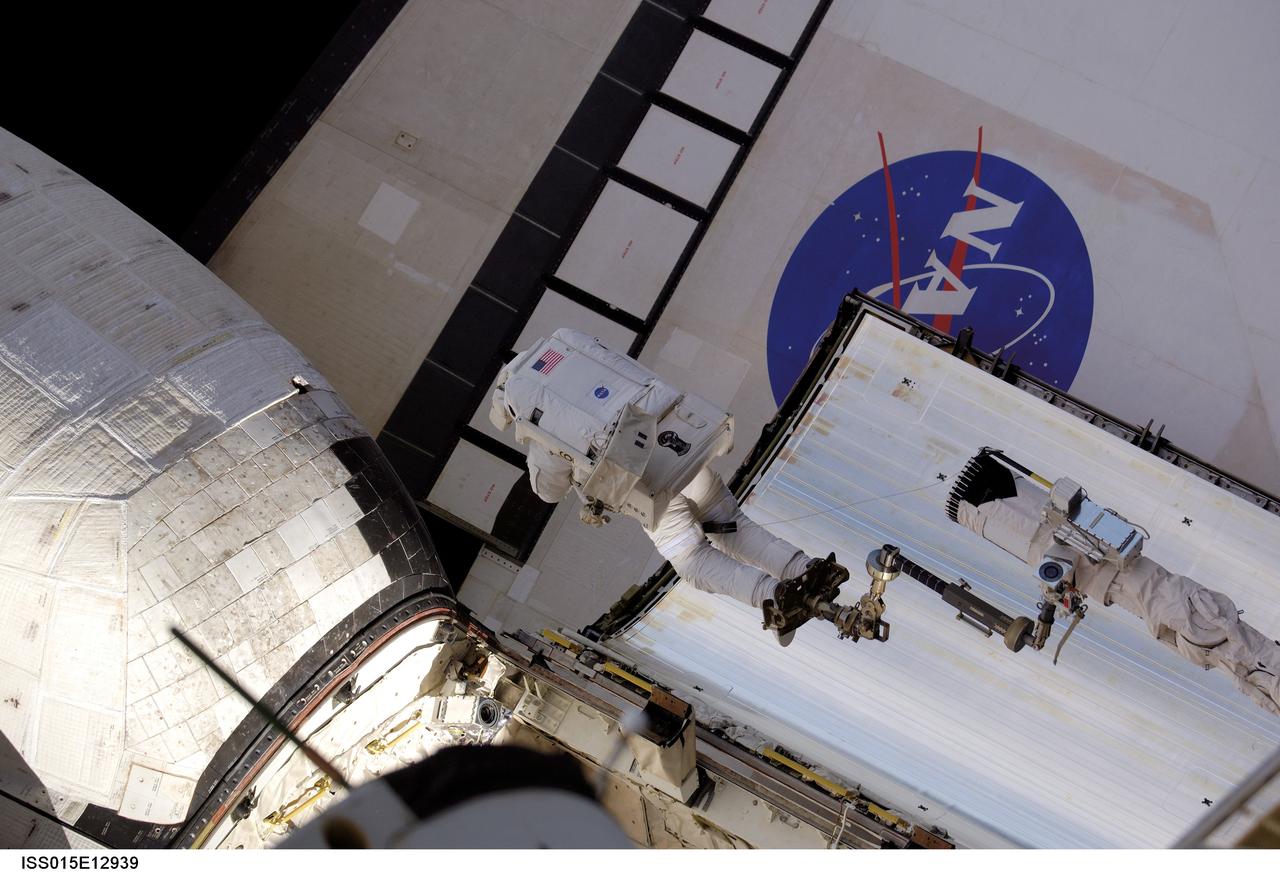
ISS015-E-12939 (15 June 2007) --- Anchored to a foot restraint on Space Shuttle Atlantis' remote manipulator system (RMS) robotic arm, astronaut John "Danny" Olivas, STS-117 mission specialist, moves toward Atlantis' port orbital maneuvering system (OMS) pod that was damaged during the shuttle's climb to orbit last week. During the repair, Olivas pushed the turned up portion of the thermal blanket back into position, used a medical stapler to secure the layers of the blanket, and pinned it in place against adjacent thermal tile.

Backdropped against the Earth, the Hubble Space Telescope (HST)is shown sporting new and modified solar arrays stowed against its barrel. Orbiting Earth at an altitude of 325 nautical miles, an astronaut begins other repairs of the HST while perched atop a foot restraint on shuttle Endeavour's remote manipulator system arm. The 59th and final Shuttle flight of 1993 was one of most challenging and complex marned missions ever attempted. During record five back-to-back space walks totaling 35 hours and 28 minutes, two teams of astronauts completed the first servicing of the HST. The STS-061 mission was launched aboard Space Shuttle Endeavor on December 2, 1993.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is lifted out of space shuttle Discovery's payload bay. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, technicians prepare to remove the remote manipulator system, or RMS, arm in the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

S125-E-009239 (17 May 2009) --- Astronaut Michael Good, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), participates in the mission?s fourth session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the eight-hour, two-minute spacewalk, Good and astronaut Mike Massimino (out of frame), mission specialist, continued repairs and improvements to the Space Telescope Imaging Spectrograph (STIS) that will extend the Hubble?s life into the next decade.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is lifted away from the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, removed from space shuttle Discovery is lowered toward a storage platform. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

51I-41-086 (1 September 1985) --- Astronaut James D. van Hoften, mission specialist, flexes his muscles in celebration of a triumphant extravehicular task. Clouds over the ocean form the backdrop for this 70mm scene, toward the end of a two-day effort to capture, repair and release the previously errant Syncom IV-3 communications satellite. Van Hoften, anchored to a special foot restraint device on the end of Discovery's Remote Manipulator System (RMS), had just performed the final "shove" that started the relative separation of the Shuttle and the Syncom, which is not far out of frame. He had been joined by astronaut William F. Fisher for the busy two days of EVA.
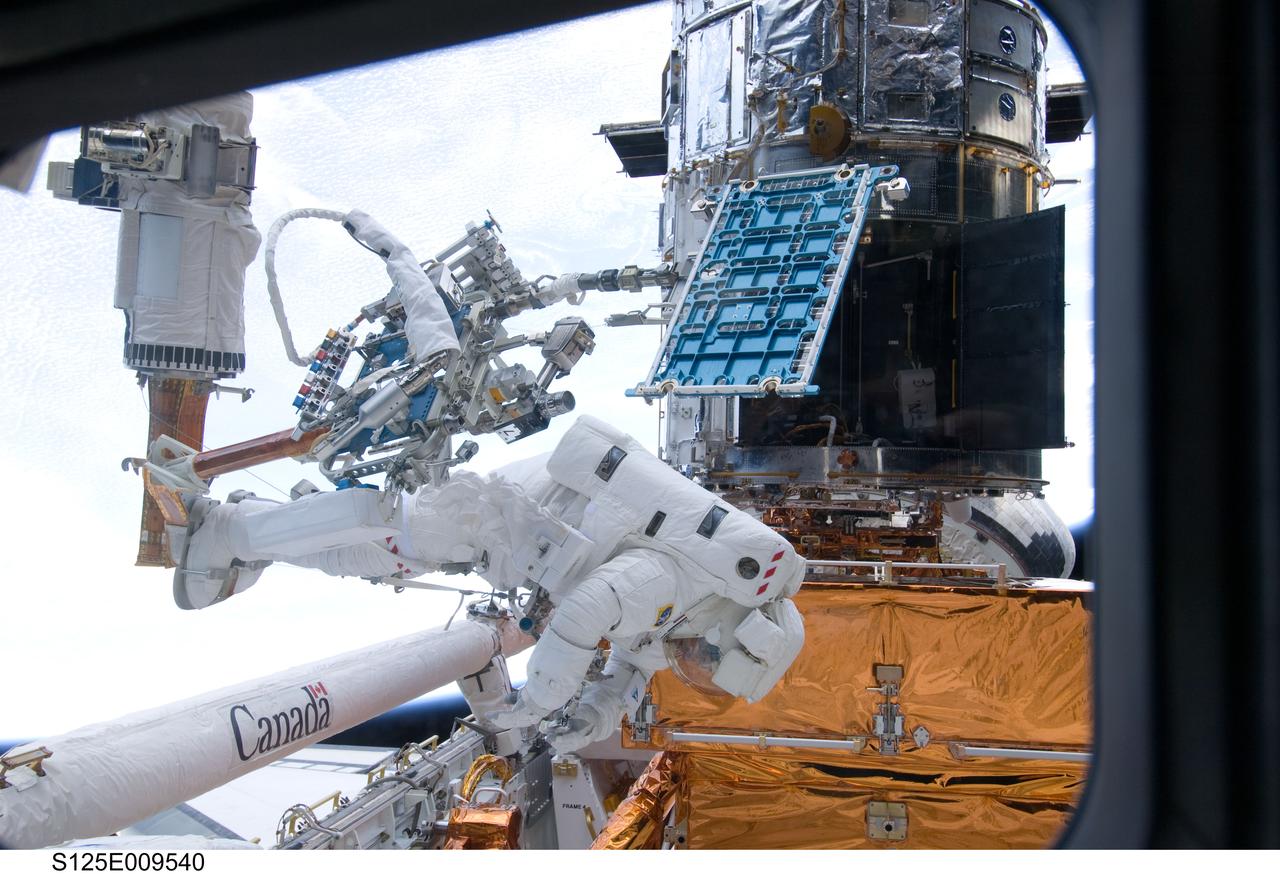
S125-E-009540 (17 May 2009) --- Astronaut Michael Good, STS-125 mission specialist, positioned on a foot restraint on the end of Space Shuttle Atlantis? remote manipulator system (RMS), participates in the mission?s fourth session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the eight-hour, two-minute spacewalk, Good and astronaut Mike Massimino (out of frame), mission specialist, continued repairs and improvements to the Space Telescope Imaging Spectrograph (STIS) that will extend the Hubble?s life into the next decade.
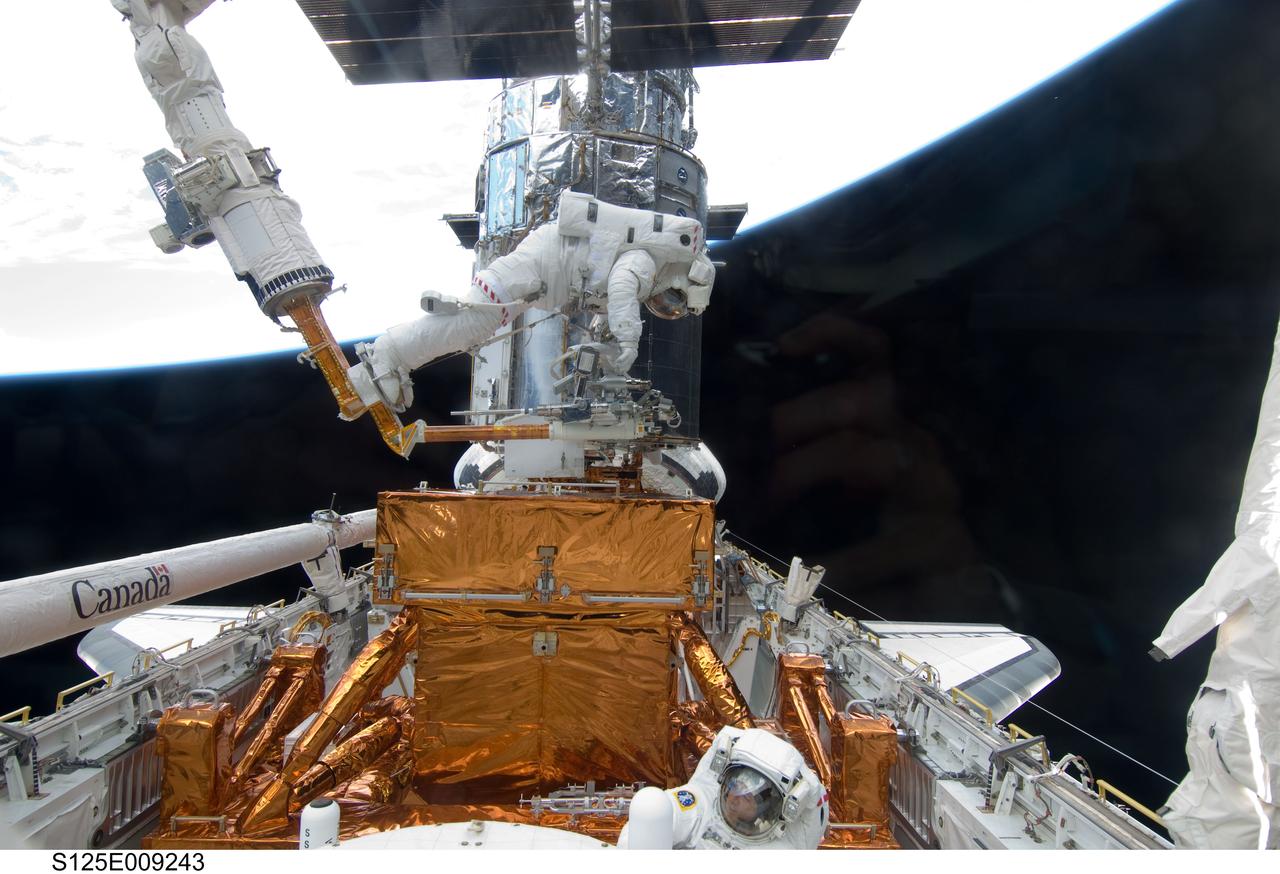
S125-E-009243 (17 May 2009) --- Astronaut Michael Good, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), and astronaut Mike Massimino (bottom), mission specialist, participate in the mission?s fourth session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the eight-hour, two-minute spacewalk, Good and Massimino continued repairs and improvements to the Space Telescope Imaging Spectrograph (STIS) that will extend the Hubble?s life into the next decade.

iss050e056301 (3/8/2017) --- A view of the Space Station Remote Manipulator System (SSRMS) during Robotic Refueling Mission-Phase 2 (RRM-P2) operations. NASA's Robotic Refueling Mission (RRM) is an external International Space Station (ISS) investigation that demonstrates and tests the tools, technologies and techniques needed to robotically refuel, repair, and upgrade satellites in space, especially satellites that were not designed to be serviced. A joint effort between NASA and the Canadian Space Agency (CSA), RRM is the first in-orbit attempt to test robotic refueling and servicing techniques for spacecraft not built with in-orbit servicing in mind.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, technicians secure the remote manipulator system, or RMS, removed from space shuttle Discovery onto a storage platform. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, remote manipulator system, or RMS, arm is lifted out of the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is moved out of the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is lifted away from space shuttle Discovery's payload bay. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

S125-E-009542 (17 May 2009) --- Astronaut Michael Good, STS-125 mission specialist, positioned on a foot restraint on the end of Space Shuttle Atlantis? remote manipulator system (RMS); and astronaut Mike Massimino (lower right, partially out of frame), mission specialist, participate in the mission?s fourth session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the eight-hour, two-minute spacewalk, Good and Massimino continued repairs and improvements to the Space Telescope Imaging Spectrograph (STIS) that will extend the Hubble?s life into the next decade.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, technicians prepare to remove remote manipulator system, or RMS, arm in the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

STS061-77-102 (7 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave are partially silhouetted against the Indian Ocean as they work to install the Magnetic Sensing System (MSS) on the Hubble Space Telescope (HST). Musgrave is anchored to the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The HST is positioned along the southern end of Madagascar, 325 nautical miles away. Visible on the western coast are the sediment laden Onilahy and Fiherenana Rivers which empty into Saint Augustin Bay. North of Fiherenana River is the Mangoky River. The circular feature on the southern end of Madagascar and to the right of HST is the L'ivakoany Mountains. The eastern coast is relatively straight compared to the western coast.
This is a photograph of the free-flying Solar Maximum Mission Satellite (SMMS), or Solar Max, as seen by the approaching Space Shuttle Orbiter Challenger STS-41C mission. Launched April 6, 1984, one of the goals of the STS-41C mission was to repair the damaged Solar Max. The original plan was to make an excursion out to the SMMS for capture to make necessary repairs, however, this attempted feat was unsuccessful. It was necessary to capture the satellite via the orbiter's Remote Manipulator System (RMS) and secure it into the cargo bay in order to perform the repairs, which included replacing the altitude control system and the coronograph/polarimeter electronics box. The SMMS was originally launched into space via the Delta Rocket in February 1980, with the purpose to provide a means of studying solar flares during the most active part of the current sunspot cycle. Dr. Einar Tandberg-Hanssen of Marshall Space Flight Center's Space Sciences Lab was principal investigator for the Ultraviolet Spectrometer and Polarimeter, one of the seven experiments on the Solar Max.

S117-E-08998 (15 June 2007) --- Medium wide scene of Atlantis' port side orbital maneuvering system pod and part of its wing prior to thermal tile protection system repair work performed by astronaut John (Danny) Olivas, STS-117 mission specialist. Olivas is seen here hovering with his feet anchored to the mobile foot restraint on the end of the Canadian-built remote manipulator system (RMS). Olivas went on to spend two hours stapling and pinning down this piece of thermal blanket on the port side OMS pod. The 4-by-6-inch corner of the blanket, which is visible here as a fist-sized black interruption to the pod's whiteness, peeled up during the shuttle's launch last week.

STS061-98-0AR (8 Dec 1993) --- Earth is partially illuminated but the Hubble Space Telescope (HST) and the Space Shuttle Endeavour are still mostly in darkness, in this 70mm frame photographed during the fourth of five space walks. Astronaut Kathryn C. Thornton, barely visible above left center in the frame, works to install the Corrective Optics Space Telescope Axial Replacement (COSTAR).
51I-102-048 (4-5 Sept 1985) --- A 35mm frame showing astronaut William F. Fisher standing on the edge of Discovery's cargo bay (in foot restraint) during the second day of a two-day effort to capture, repair and re-release the Syncom IV-3 communications satellite. Astronaut James D. van Hoften, standing on the Discovery's RMS arm, exposed the frame.

STS061-98-050 (9 Dec 1993) --- Astronaut F. Story Musgrave, anchored on the end of the Remote Manipulator System (RMS) arm, prepares to be elevated to the top of the towering Hubble Space Telescope (HST) to install protective covers on magnetometers. Astronaut Jeffrey A. Hoffman (bottom of frame) assisted Musgrave with final servicing tasks on the telescope, wrapping up five days of extravehicular activities (EVA).

STS061-99-009 (9 Dec 1993) --- Sunlight reflects off the Space Shuttle Endeavour's aft windows and the shiny Hubble Space Telescope (HST) prior to its post-servicing deployment near the end of the eleven-day mission. A handheld Hasselblad camera was used inside Endeavour's cabin to record the image.

STS061-95-075 (6 Dec 1993) --- Astronauts Kathryn C. Thornton and Thomas D. Akers work to remove one of the solar arrays on the Hubble Space Telescope (HST) on the second of five extravehicular activity?s (EVA). The two space walkers later replaced both solar array panels. Part of Australia is in the background.
STS061-86-048 (5 Dec 1993) --- Astronauts F. Story Musgrave (foreground) and Jeffrey A. Hoffman are pictured near the end of the first of five extravehicular activity?s (EVA). Musgrave works at the Solar Array Carrier (SAC) in the Space Shuttle Endeavour's cargo bay. Hoffman, anchored to a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, waits to be maneuvered to the forward payload bay. The original solar array panels are partially visible at top, while their replacements remain stowed in foreground. The crew's second pair of space walkers -- astronauts Kathryn C. Thornton and Thomas D. Akers -- later changed the solar arrays on the mission's second EVA.

STS061-102-010 (9 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave team to replace one of two Solar Array Drive Electronics (SADE) units on the Hubble Space Telescope (HST). Musgrave is standing on a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The black object, in upper left corner, is part of the window frame, through which this 70mm frame was exposed, inside Endeavour's cabin.

STS061-104-007 (5 Dec 1993) --- Astronaut F. Story Musgrave, holding to one of many strategically placed handrails on the Hubble Space Telescope (HST), is photographed during the first of five extravehicular activity?s (EVA) on the HST-servicing mission, aboard the Space Shuttle Endeavour.
STS061-87-046 (5 Dec 1993) --- Astronauts Jeffrey A. Hoffman (right) and F. Story Musgrave work near the base of the Hubble Space Telescope (HST) on the first of five spacewalks. Their particular mission here is to replace failed Rate Sensor Units (RSU) inside the telescope's housing. Hoffman is anchored to a foot restraint, mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, while Musgrave is standing on a foot restraint attached to a support structure in the cargo bay.
STS061-94-059 (8 Dec. 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR.

Launched on July 26, 2005 from the Kennedy Space Center in Florida, STS-114 was classified as Logistics Flight 1. Among the Station-related activities of the mission were the delivery of new supplies and the replacement of one of the orbital outpost's Control Moment Gyroscopes (CMGs). STS-114 also carried the Raffaello Multi-Purpose Logistics Module and the External Stowage Platform-2. A major focus of the mission was the testing and evaluation of new Space Shuttle flight safety, which included new inspection and repair techniques. Upon its approach to the International Space Station (ISS), the Space Shuttle Discovery underwent a photography session in order to assess any damages that may have occurred during its launch and/or journey through Space. The mission’s third and final Extra Vehicular Activity (EVA) included taking a close-up look and the repair of the damaged heat shield. Gap fillers were removed from between the orbiter’s heat-shielding tiles located on the craft’s underbelly. Never before had any repairs been done to an orbiter while still in space. This particular photo was taken by astronaut Stephen K. Robinson, STS-114 mission specialist, whose shadow is visible on the thermal protection tiles, and a portion of the Canadian built Remote Manipulator System (RMS) robotic arm and the Nile River is visible at the bottom.

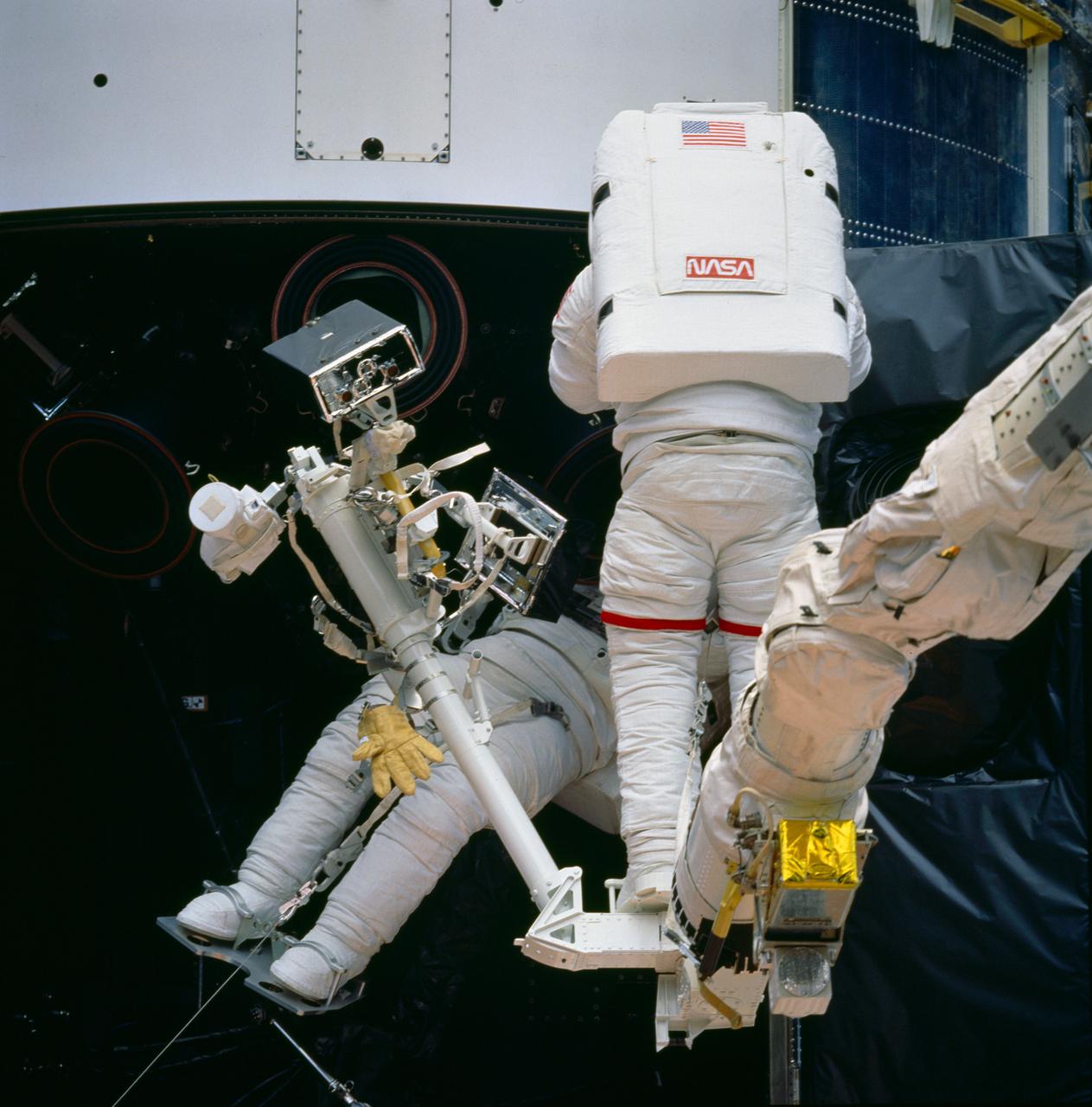
In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares, active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability enabling the repair of the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured are crew members training on repair tasks.

In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares, active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability enabling the repair of the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured are crew members training for repair tasks.

CAPE CANAVERAL, Fla. -- Replacement parts for the Zvezda service module toilet on the International Space Station are inspected following their arrival at Kennedy Space Center. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to space shuttle Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. -- At Launch Pad 39A at Kennedy Space Center, replacement parts for the Zvezda service module toilet on the International Space Station are loaded aboard space shuttle Discovery. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. -- Replacement parts for the Zvezda service module toilet on the International Space Station are inspected following their arrival at Kennedy Space Center. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to space shuttle Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. -- A technician inspects a replacement part for the Zvezda service module toilet on the International Space Station following its arrival at Kennedy Space Center. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to space shuttle Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Kim Shiflett
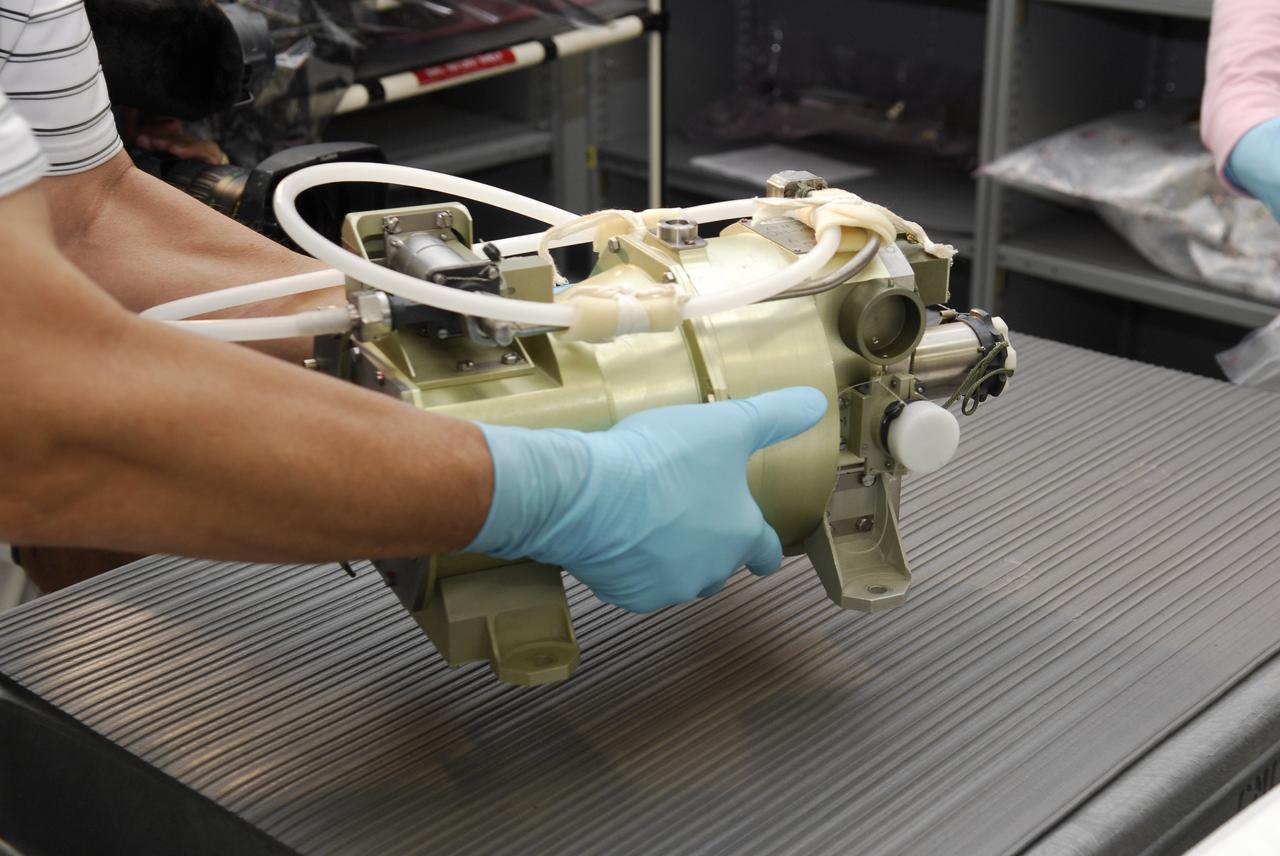
CAPE CANAVERAL, Fla. -- A replacement part for the Zvezda service module toilet on the International Space Station is inspected following its arrival at Kennedy Space Center. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to space shuttle Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Kim Shiflett

S125-E-008125 (16 May 2009) --- Astronaut Andrew Feustel, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), participates in the mission?s third session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the six-hour, 36-minute spacewalk, Feustel and astronaut John Grunsfeld (out of frame), mission specialist, removed the Corrective Optics Space Telescope Axial Replacement and installed in its place the new Cosmic Origins Spectrograph. They also completed the Advanced Camera for Surveys electronic card replacement work, and completed part 2 of the ACS repair, installing a new electronics box and cable.

CAPE CANAVERAL, Fla. -- At Launch Pad 39A at Kennedy Space Center, technicians load replacement parts for the Zvezda service module toilet on the International Space Station aboard space shuttle Discovery. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Dimitri Gerondidakis

CAPE CANAVERAL, Fla. -- At Launch Pad 39A at Kennedy Space Center, technicians load replacement parts for the Zvezda service module toilet on the International Space Station aboard space shuttle Discovery. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Dimitri Gerondidakis

S125-E-008124 (16 May 2009) --- Astronaut Andrew Feustel, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), participates in the mission?s third session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the six-hour, 36-minute spacewalk, Feustel and astronaut John Grunsfeld (out of frame), mission specialist, removed the Corrective Optics Space Telescope Axial Replacement and installed in its place the new Cosmic Origins Spectrograph. They also completed the Advanced Camera for Surveys electronic card replacement work, and completed part 2 of the ACS repair, installing a new electronics box and cable.
CAPE CANAVERAL, Fla. -- At Launch Pad 39A at Kennedy Space Center, a technician loads replacement parts for the Zvezda service module toilet on the International Space Station aboard space shuttle Discovery. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Dimitri Gerondidakis

S125-E-008131 (16 May 2009) --- Astronaut Andrew Feustel, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), participates in the mission?s third session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the six-hour, 36-minute spacewalk, Feustel and astronaut John Grunsfeld (out of frame), mission specialist, removed the Corrective Optics Space Telescope Axial Replacement and installed in its place the new Cosmic Origins Spectrograph. They also completed the Advanced Camera for Surveys electronic card replacement work, and completed part 2 of the ACS repair, installing a new electronics box and cable.

CAPE CANAVERAL, Fla. -- A technician inspects a replacement part for the Zvezda service module toilet on the International Space Station following its arrival at Kennedy Space Center. The toilet malfunctioned last week and was initially repaired by replacing a microprocessor valve. After the station crew members experienced additional difficulties with the toilet, they were directed to use Soyuz toilet facilities at first and are using the main toilet again after rigging a urine bypass. The spare toilet parts have been added to space shuttle Discovery’s manifest for delivery to the station on the STS-124 mission. On the 14-day mission, Discovery and its crew will deliver the Japan Aerospace Exploration Agency's Japanese Experiment Module – Pressurized Module and the Japanese Remote Manipulator System. Launch is scheduled for 5:02 p.m. EDT May 31. Photo credit: NASA/Kim Shiflett
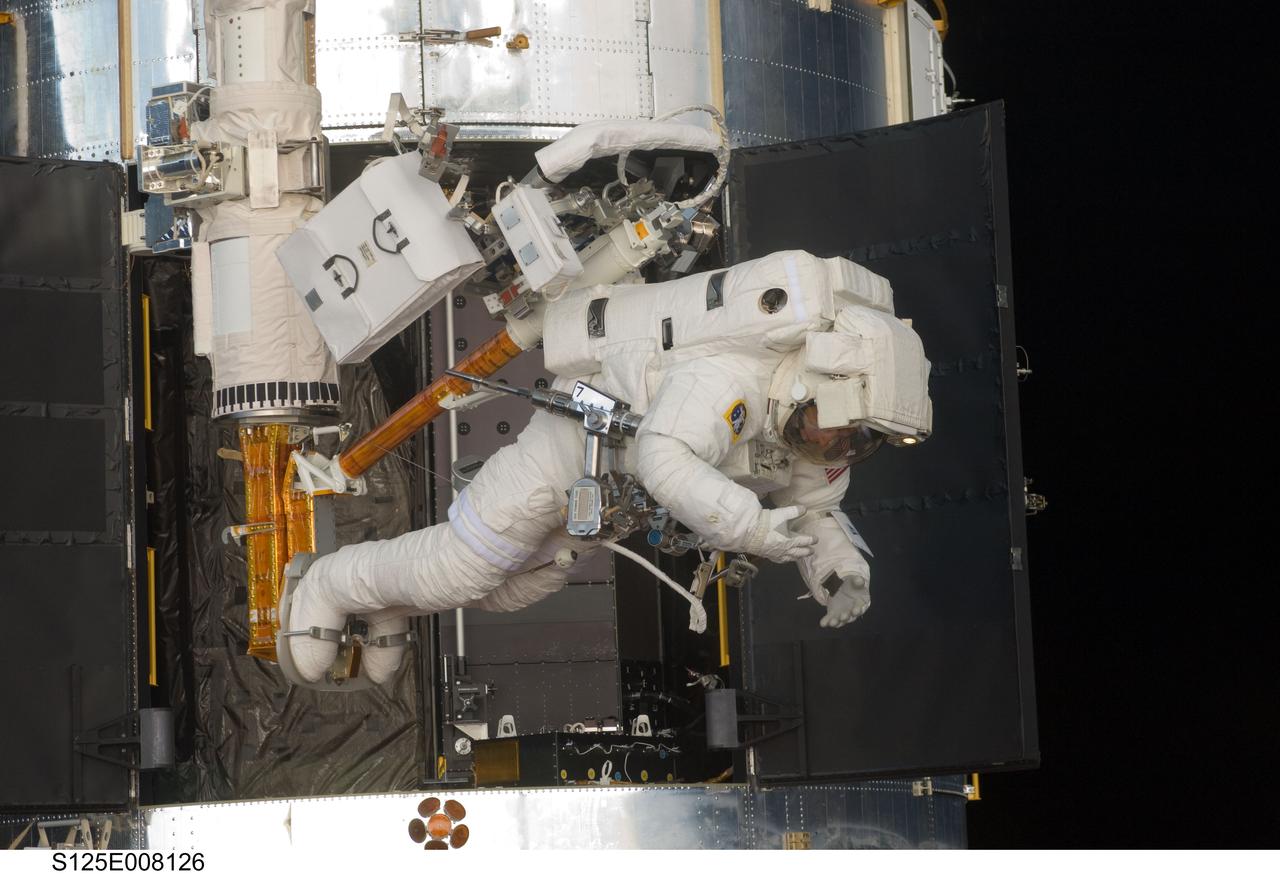
S125-E-008126 (16 May 2009) --- Astronaut Andrew Feustel, STS-125 mission specialist, positioned on a foot restraint on the end of Atlantis? remote manipulator system (RMS), participates in the mission?s third session of extravehicular activity (EVA) as work continues to refurbish and upgrade the Hubble Space Telescope. During the six-hour, 36-minute spacewalk, Feustel and astronaut John Grunsfeld (out of frame), mission specialist, removed the Corrective Optics Space Telescope Axial Replacement and installed in its place the new Cosmic Origins Spectrograph. They also completed the Advanced Camera for Surveys electronic card replacement work, and completed part 2 of the ACS repair, installing a new electronics box and cable.

In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares, active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability enabling repair of the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured is Dr. Nelson performing a replacement task on the Solar Max mock-up in the NBS.

In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares,active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability enabling the repair of the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured is Dr. Nelson performing a replacement task on the Solar Max mock-up in the NBS.

In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares, active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability enabling the repair of the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured is Dr. Nelson performing a replacement task on the Solar Max mock-up in the NBS.

In February 1980, a satellite called Solar Maximum Mission Spacecraft, or Solar Max, was launched into Earth's orbit. Its primary objective was to provide a detailed study of solar flares,active regions on the Sun's surface, sunspots, and other solar activities. Additionally, it was to measure the total output of radiation from the Sun. Not much was known about solar activity at that time except for a slight knowledge of solar flares. After its launch, Solar Max fulfilled everyone's expectations. However, after a year in orbit, Solar Max's Altitude Control System malfunctioned, preventing the precise pointing of instruments at the Sun. NASA scientists were disappointed at the lost data, but not altogether dismayed because Solar Max had been designed for Space Shuttle retrievability, enabling repair to the satellite. On April 6, 1984, Space Shuttle Challenger (STS-41C), Commanded by astronaut Robert L. Crippen and piloted by Francis R. Scobee, launched on a historic voyage. This voyage initiated a series of firsts for NASA; the first satellite retrieval, the first service use of a new space system called the Marned Maneuvering Unit (MMU), the first in-orbit repair, the first use of the Remote Manipulator System (RMS), and the Space Shuttle Challenger's first space flight. The mission was successful in retrieving Solar Max. Mission Specialist Dr. George D. Nelson, using the MMU, left the orbiter's cargo bay and rendezvoused with Solar Max. After attaching himself to the satellite, he awaited the orbiter to maneuver itself nearby. Using the RMS, Solar Max was captured and docked in the cargo bay while Dr. Nelson replaced the altitude control system and the coronagraph/polarimeter electronics box. After the repairs were completed, Solar Max was redeposited in orbit with the assistance of the RMS. Prior to the April 1984 launch, countless man-hours were spent preparing for this mission. The crew of Challenger spent months at Marshall Space Flight Center's (MSFC) Neutral Buoyancy Simulator (NBS) practicing retrieval maneuvers, piloting the MMU, and training on equipment so they could make the needed repairs to Solar Max. Pictured is Dr. Nelson performing a replacement task on the Solar Max mock-up in the NBS.

Astronaut James H. Newman, mission specialist, floats about in the Space Shuttle Columbia's cargo bay while working in tandem with astronaut Michael J. Massimino (out of frame),mission specialist, during the STS-109 mission's second day of extravehicular activity (EVA). Inside Columbia's cabin, astronaut Nancy J. Currie, mission specialist, controlled the Remote Manipulator System (RMS) to assist the two in their work on the Hubble Space Telescope (HST). The RMS was used to capture the telescope and secure it into Columbia's cargo bay.Part of the giant telescope's base, latched down in the payload bay, can be seen behind Newman. The Space Shuttle Columbia STS-109 mission lifted off March 1, 2002 with goals of repairing and upgrading the HST. The Marshall Space Flight Center in Huntsville, Alabama had responsibility for the design, development, and contruction of the HST, which is the most powerful and sophisticated telescope ever built. STS-109 upgrades to the HST included: replacement of the solar array panels; replacement of the power control unit (PCU); replacement of the Faint Object Camera (FOC) with a new advanced camera for Surveys (ACS); and installation of the experimental cooling system for the Hubble's Near-Infrared Camera and Multi-object Spectrometer (NICMOS), which had been dormant since January 1999 when its original coolant ran out. Lasting 10 days, 22 hours, and 11 minutes, the STS-109 mission was the 108th flight overall in NASA's Space Shuttle Program.