
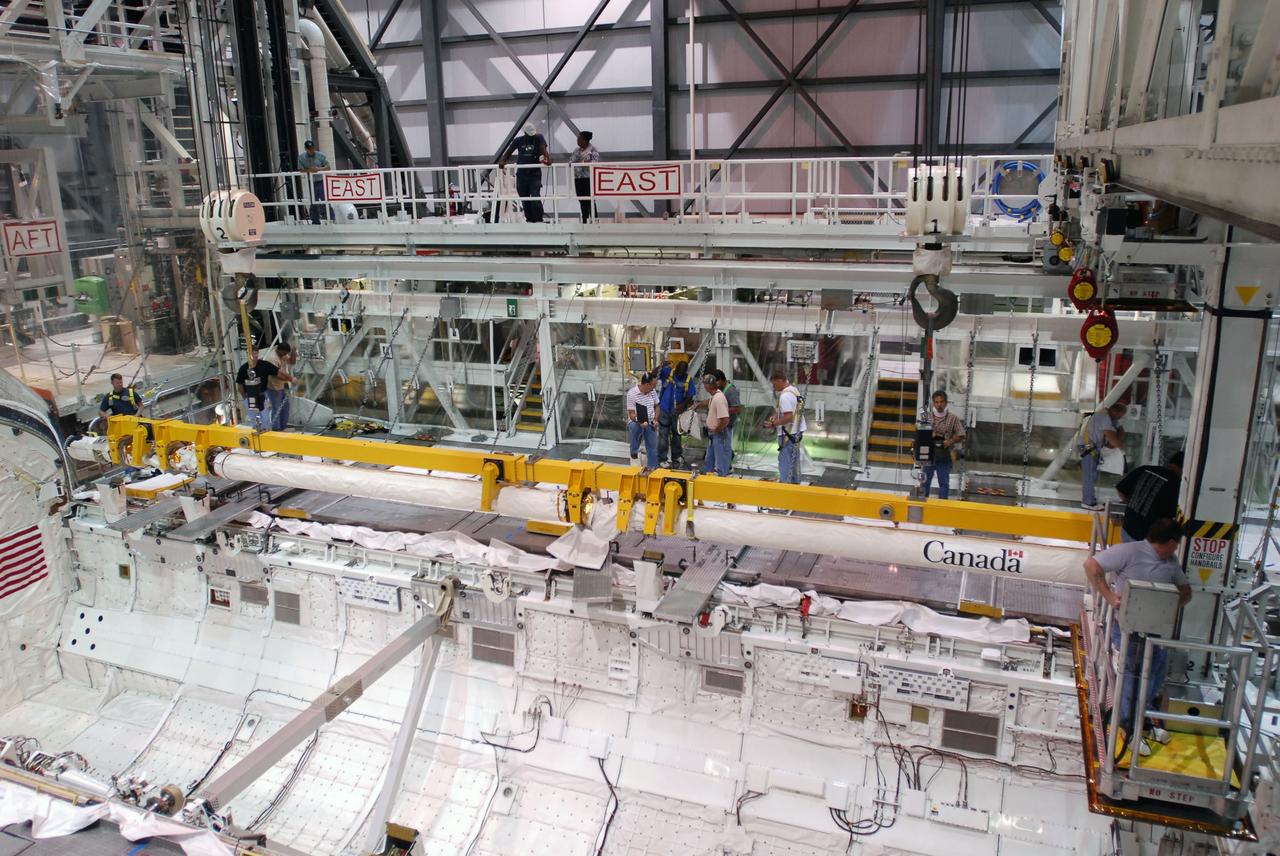
CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers attach lifting cranes to the container holding the remote manipulator system, or RMS. The RMS is placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, a United Space Alliance worker attaches lifting cranes to the container holding the remote manipulator system, or RMS. The RMS will be placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lifted. The RMS will be placed on a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, the remote manipulator system, or RMS, has been crated and prepared for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, the remote manipulator system, or RMS, has been crated and prepared for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers help guide the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lowered onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers help guide the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers monitor the progress as the container holding the remote manipulator system, or RMS, is lowered onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

CAPE CANAVERAL, Fla. - Inside the Vehicle Assembly Building at NASA’s Kennedy Space Center in Florida, United Space Alliance workers position the container holding the remote manipulator system, or RMS, onto a flatbed truck for shipment back to the Canadian Space Agency. The RMS, also called the Canadarm, was manufactured for NASA’s Space Shuttle Program by SPAR Aerospace Ltd., which later became a part of MD Robotics in Ontario, Canada. During shuttle missions, the RMS was attached in the payload bay. Mission specialists operated the arm to remove payloads from the payload bay and hand them off to the larger Canadarm 2 on the International Space Station. The shuttle arm also was used during astronaut spacewalks. Photo credit: NASA/Kim Shiflett

This is an STS-61B onboard photo of astronauts Ross and Spring on the Remote Manipulator System (RMS) as they approach the erected Assembly Concept for Construction of Erectable Space Structure (ACCESS).
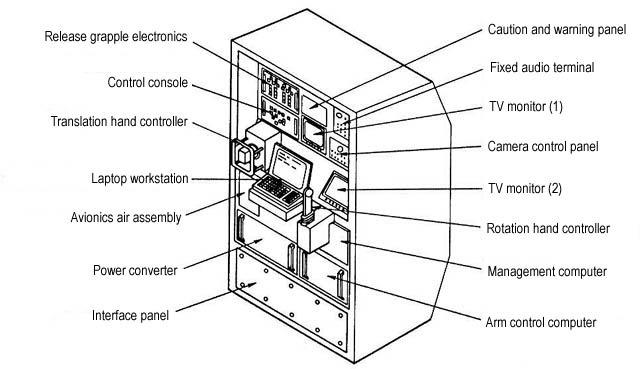
JSC2003-E-42546 (For Release: 18 June 2003) --- This graphic shows the console where flight crews will operate the Kibo Japanese Experiment Module (JEM) Remote Manipulator System (RMS) from inside the Pressurized Module (PM). The RMS is used to exchange experiment payloads or hardware located on the JEM Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the Pressurized Module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units (ORUs). Photo Credit: NASDA
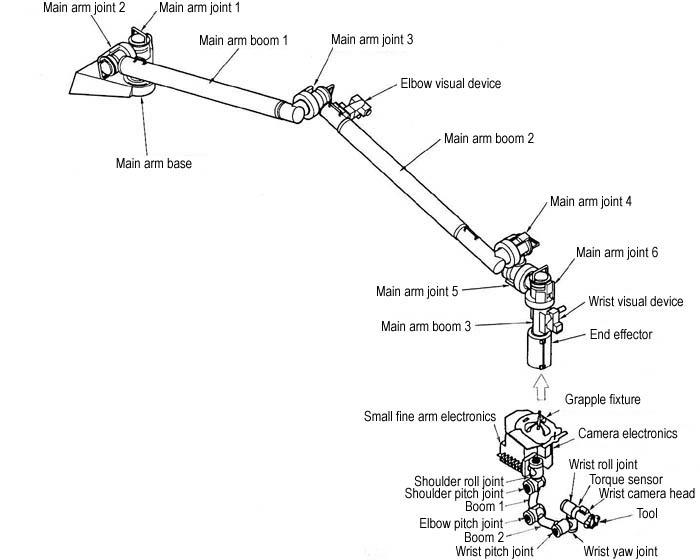
JSC2003-E-42547 (For Release: 18 June 2003) --- This graphic shows the Kibo Japanese Experiment Module (JEM) Remote Manipulator System (RMS). The RMS is used to exchange experiment payloads or hardware located on the JEM Exposed Facility and Experiment Logistics Module - Exposed Section and from inside the Pressurized Module through a scientific airlock, support maintenance tasks of Kibo and handle orbital replacement units (ORUs). The Main Arm can handle up to seven tons (14,000 pounds) of hardware and the Small Fine Arm, when attached to the Main Arm, handles more delicate operations. Photo Credit: NASDA

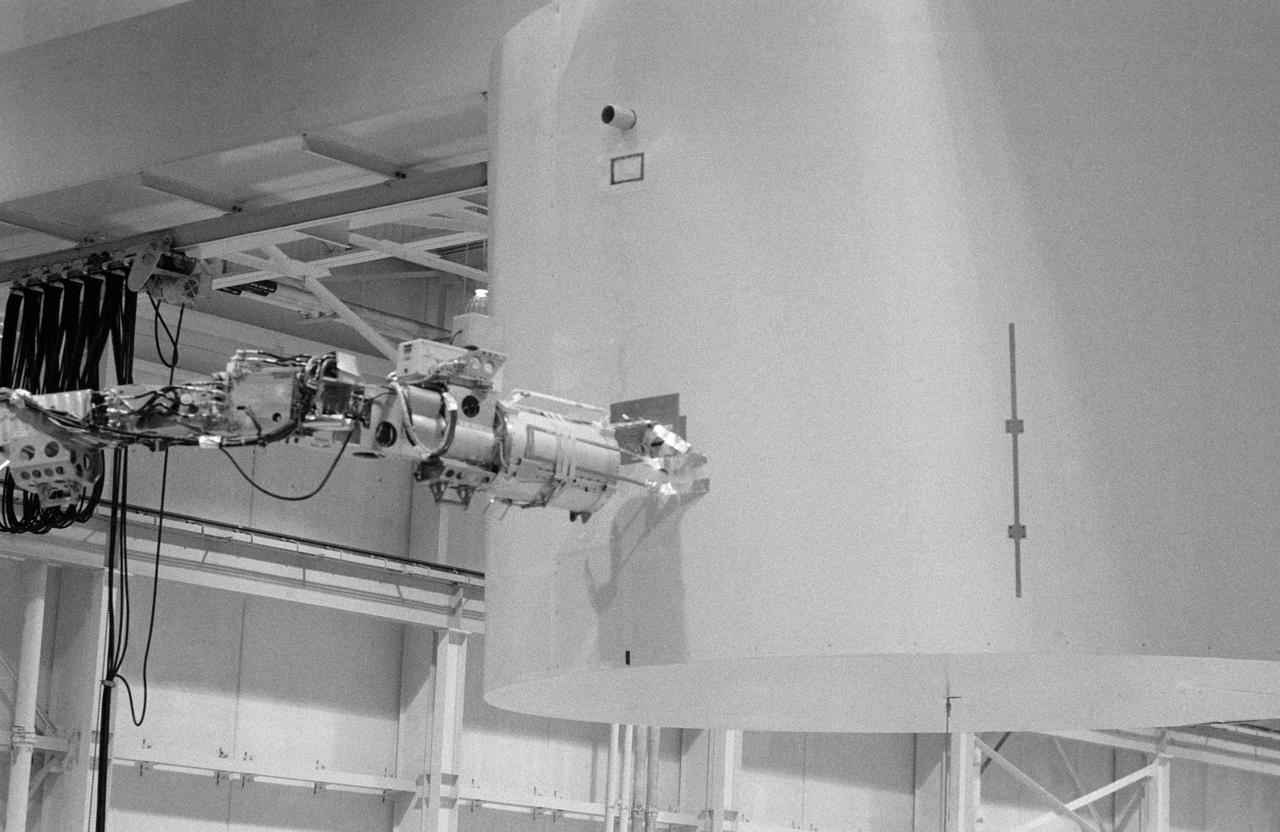
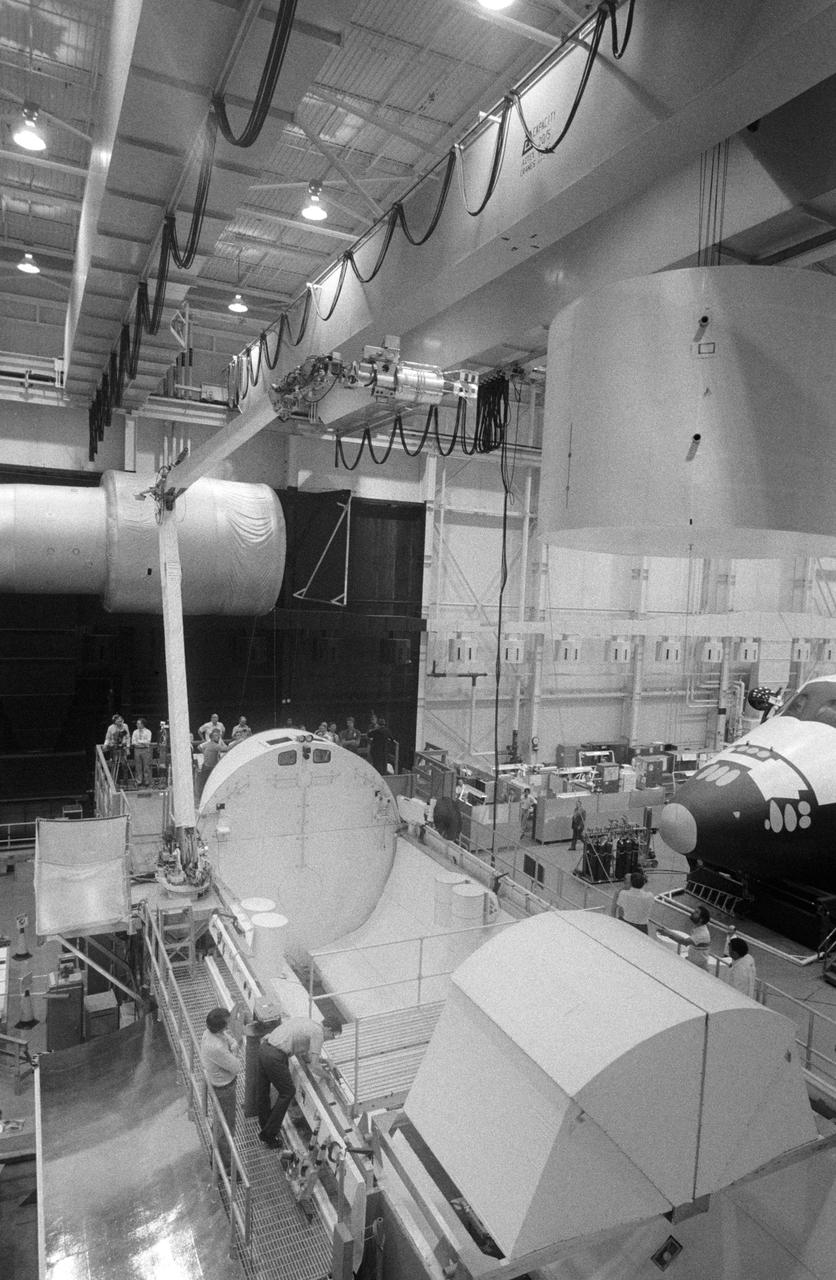
JSC2003-E-42548 (For Release: 18 June 2003) --- The Remote Manipulator System (RMS) Small Fine Arm is shown in a processing facility. The RMS consists of two robotic arms that support operations on the outside of the Japanese Experiment Module (JEM) Japan's primary contribution to the International Space Station. The Main Arm can handle up to seven tons (14,000 pounds) of hardware and the Small Fine Arm, when attached to the Main Arm, handles more delicate operations. Each arm has six joints that mimic the movements of a human arm. Photo Credit: NASA
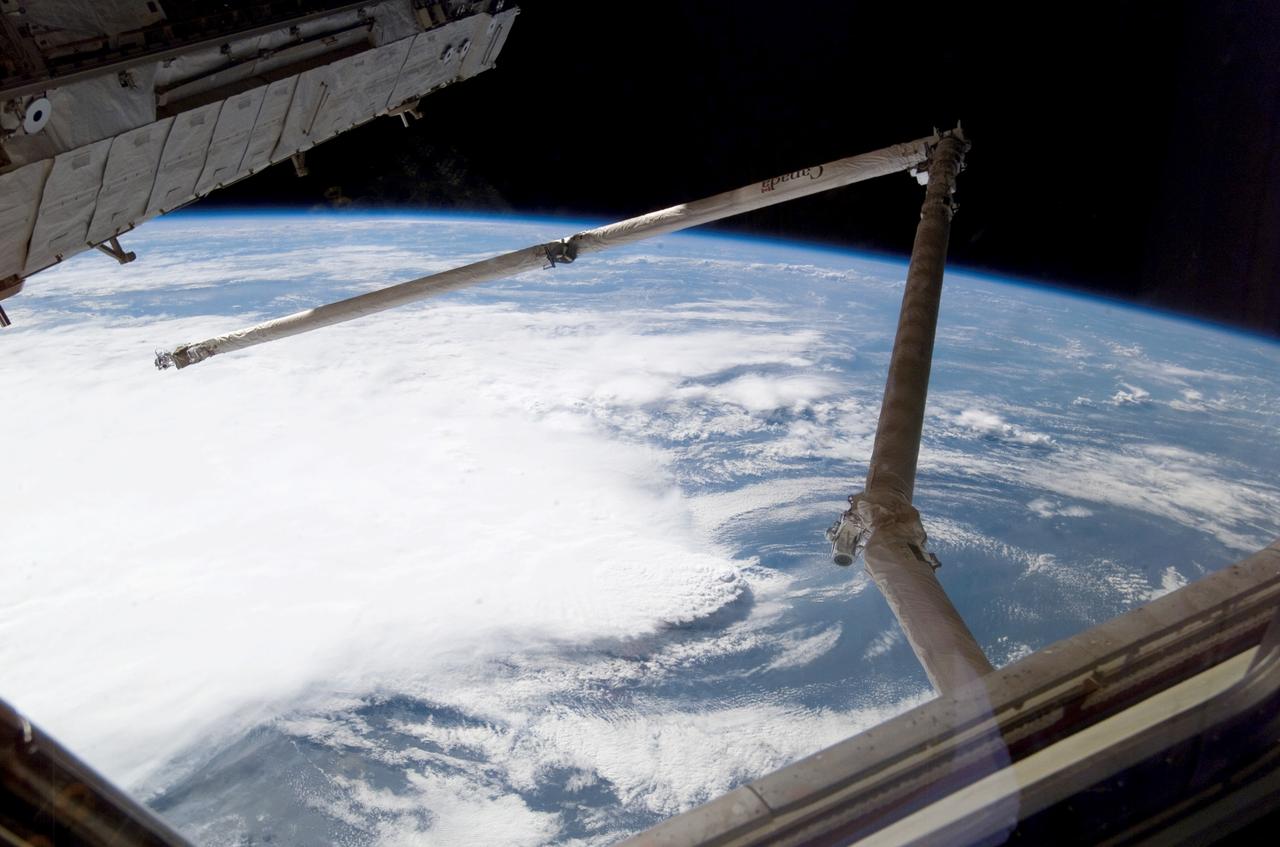
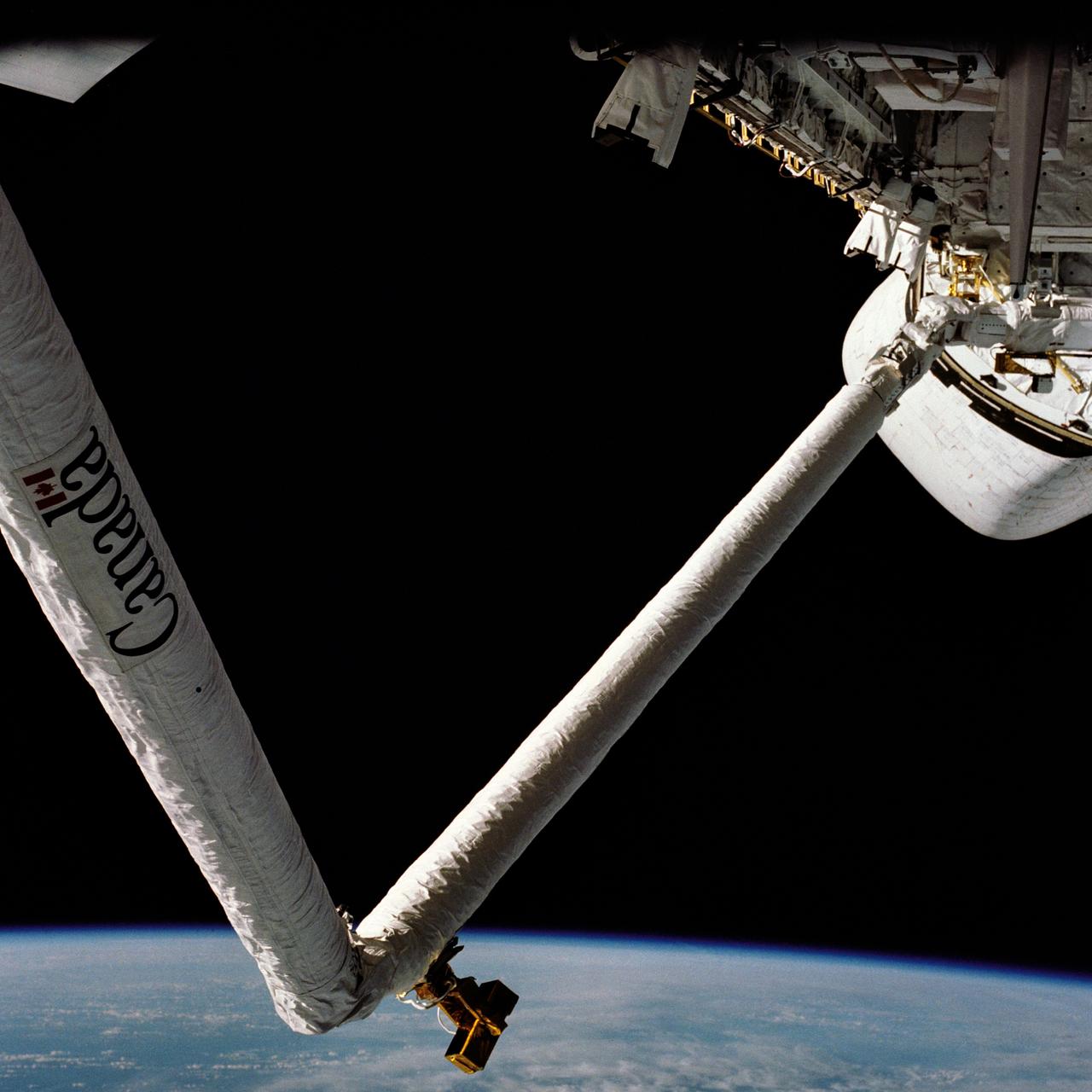
ISS011-E-11416 (2 August 2005) --- A line of thunderstorms form the backdrop for this view of the extended Space Shuttle Discovery;s remote manipulator system (RMS) robotic arm while docked to the International Space Station during the STS-114 mission.

ISS020-E-042225 (23 Sept. 2009) --- NASA astronaut Nicole Stott and European Space Agency astronaut Frank De Winne, both Expedition 20 flight engineers, work the controls of the JEM Robotic Manipulator System (JEM-RMS) in the Kibo laboratory of the International Space Station. De Winne and Stott used the JEM-RMS to grapple the Exposed Pallet (EP) from the station’s Canadarm2 and berth it to the JEM Exposed Facility / Exposed Facility Unit 10 (JEF EFU10).

ISS020-E-042237 (23 Sept. 2009) --- NASA astronaut Nicole Stott and European Space Agency astronaut Frank De Winne, both Expedition 20 flight engineers, work the controls of the JEM Robotic Manipulator System (JEM-RMS) in the Kibo laboratory of the International Space Station. De Winne and Stott used the JEM-RMS to grapple the Exposed Pallet (EP) from the station’s Canadarm2 and berth it to the JEM Exposed Facility / Exposed Facility Unit 10 (JEF EFU10).

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers disconnect the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted toward a transportation canister following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, workers secure the remote manipulator system, or RMS, in a transportation canister following its removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane lifts the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is lifted from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, is suspended from the ceiling following removal from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, a crane is attached to the remote manipulator system, or RMS, in space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs
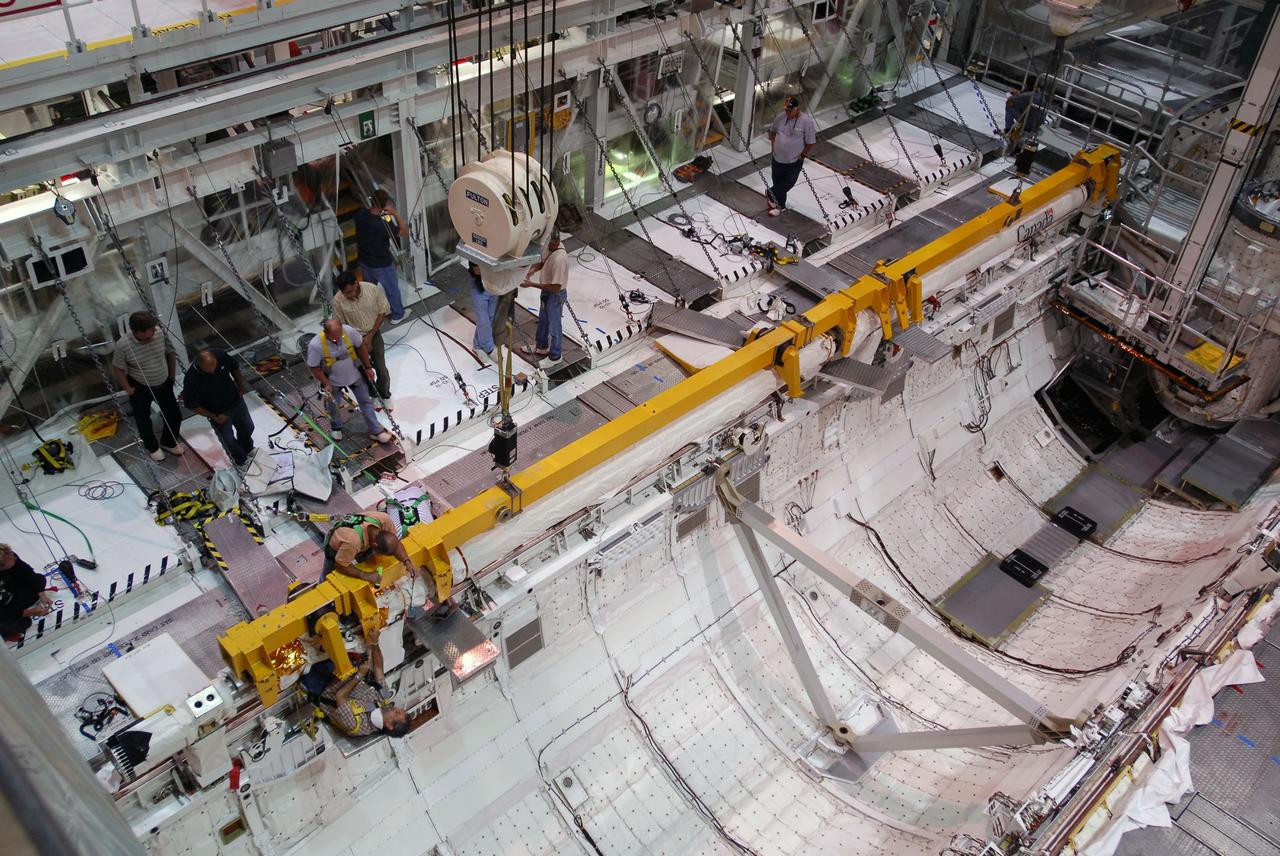
CAPE CANAVERAL, Fla. -- In Orbiter Processing Facility-1 at NASA's Kennedy Space Center in Florida, tethered workers prepare to remove the remote manipulator system, or RMS, from space shuttle Endeavour's payload bay. The removal is part of Endeavour's transition and retirement processing. Endeavour is being prepared for public display at the California Science Center in Los Angeles. Endeavour flew 25 missions, spent 299 days in space, orbited Earth 4,671 times and traveled 122,883,151 miles over the course of its 19-year career. Photo credit: NASA/Tim Jacobs

View of Japanese Experiment Module (JEM) Pressurized Module (JPM) Robotic Manipulator System (RMS). Photo was taken during Expedition 34.
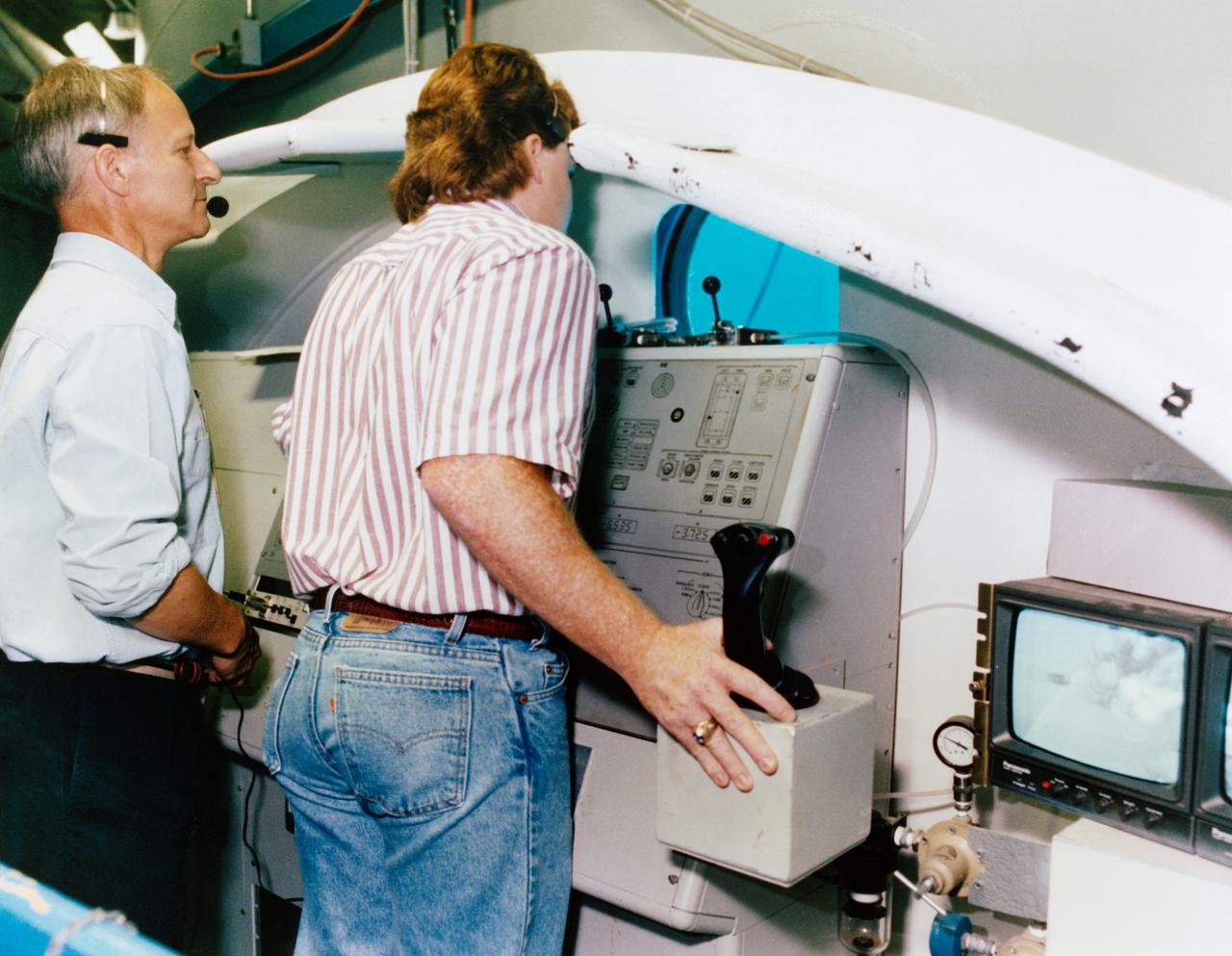
Swiss scientits Claude Nicollier (left), STS-61 mission specialist, waits his turn at the controls for the remote manipulator system (RMS) during a training session in the Neutral Buoyancy Simulator at Marshall Space Flight Center (MSFC). Mark Norman of MSFC has control of the RMS in this frame.

S114-E-6077 (30 July 2005) --- The blackness of space and Earth’s horizon form the backdrop for this view while Space Shuttle Discovery was docked to the International Space Station during the STS-114 mission. A portion of Discovery’s remote manipulator system (RMS) robotic arm is visible at lower right and a section of the Station’s truss is visible top frame.

STS102-E-5201 (13 March 2001) --- A view of the interior of the end effector apparatus on the end of the Canadian-built remote manipulator system (RMS) arm. The photograph was taken with a digital still camera.
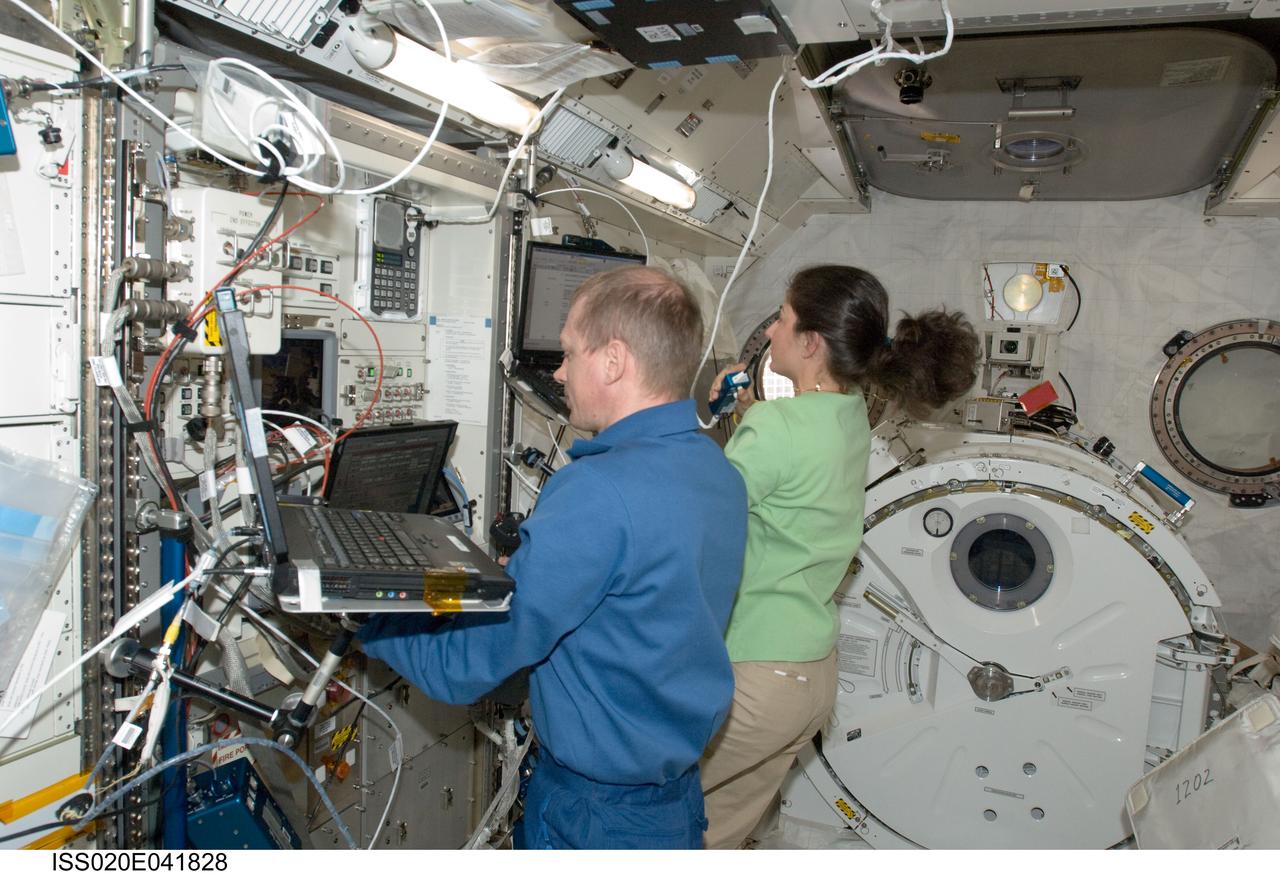
ISS020-E-041828 (23 Sept. 2009) --- European Space Agency astronaut Frank De Winne and NASA astronaut Nicole Stott, both Expedition 20 flight engineers, work the controls of the JEM Robotic Manipulator System (JEM-RMS) in the Kibo laboratory of the International Space Station. De Winne and Stott used the JEM-RMS to grapple the Exposed Pallet (EP) from the station’s Canadarm2 and berth it to the JEM Exposed Facility / Exposed Facility Unit 10 (JEF EFU10).
STS002-13-226 (13 Nov. 1981) --- Backdropped against Earth's horizon and the darkness of space, the space shuttle Columbia's remote manipulator system (RMS) gets its first workout in zero-gravity during the STS-2 mission. A television camera is mounted near the elbow and another is partially visible near the wrist of the RMS. Photo credit: NASA
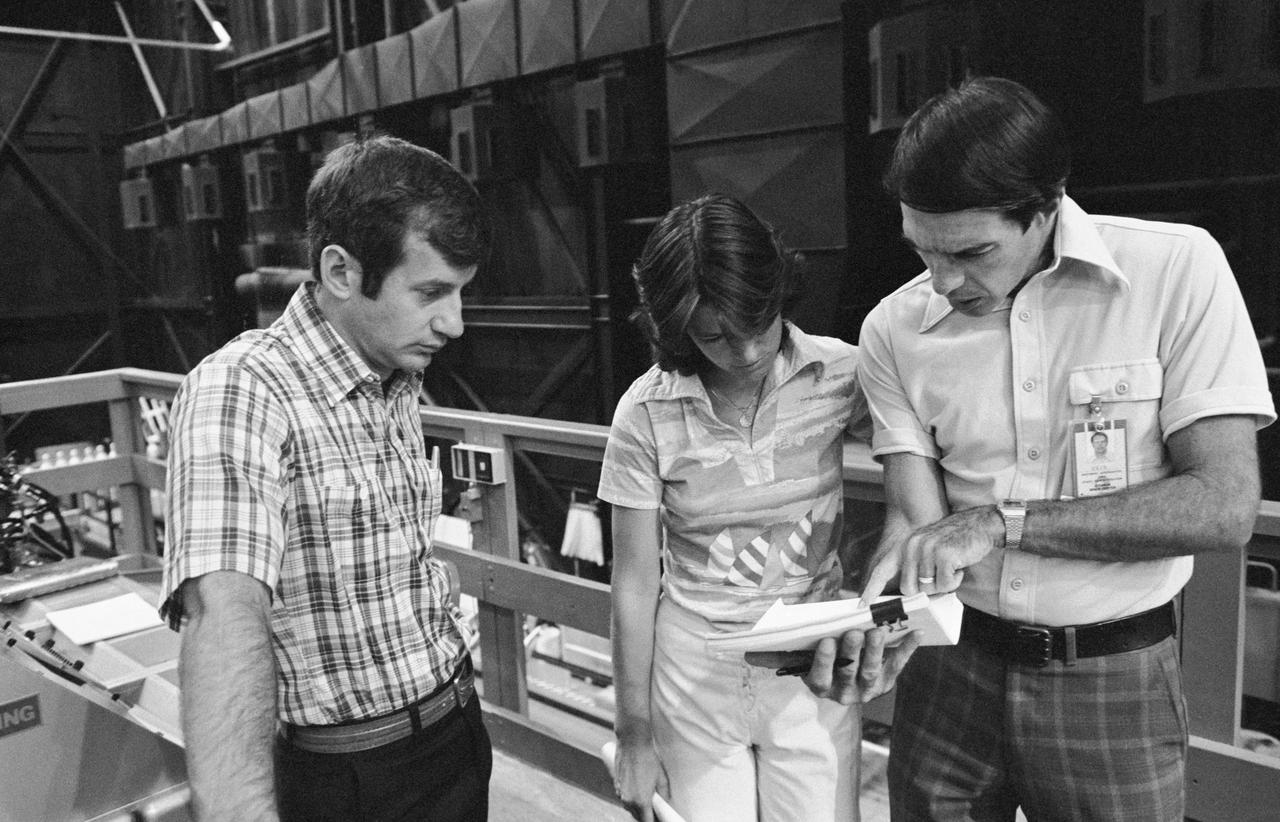
Astronauts Sally Ride and Terry Hart prepare for remote manipulator system (RMS) training for STS-2 in bldg 9A. Views include Ride, Hart and Robert R. Kain of the Flight Activites Branch reviewing procedures for RMS training (34262); Ride and Hart stand beside the RMS control center looking down at the payload bay mock-up (34263).
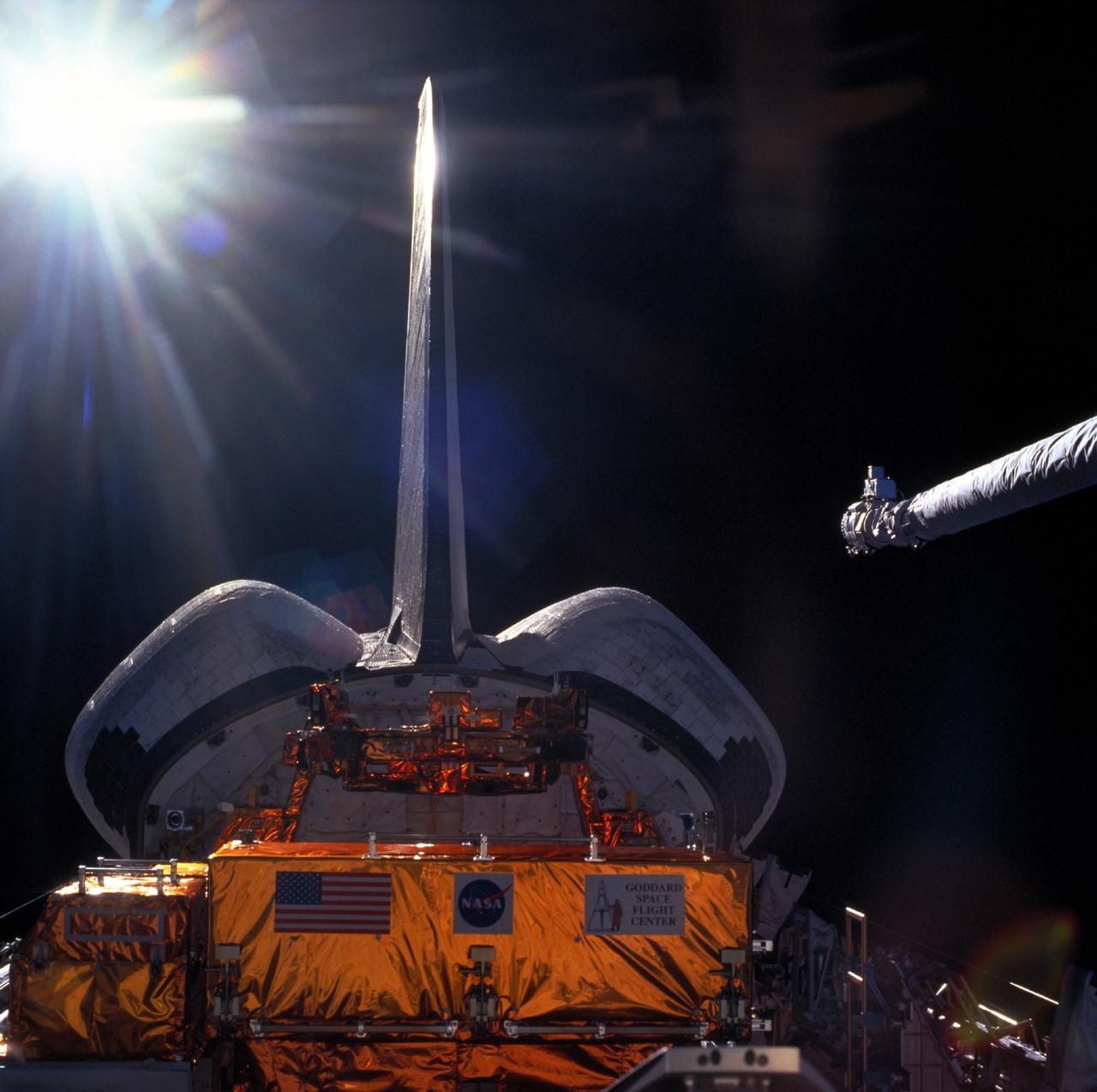
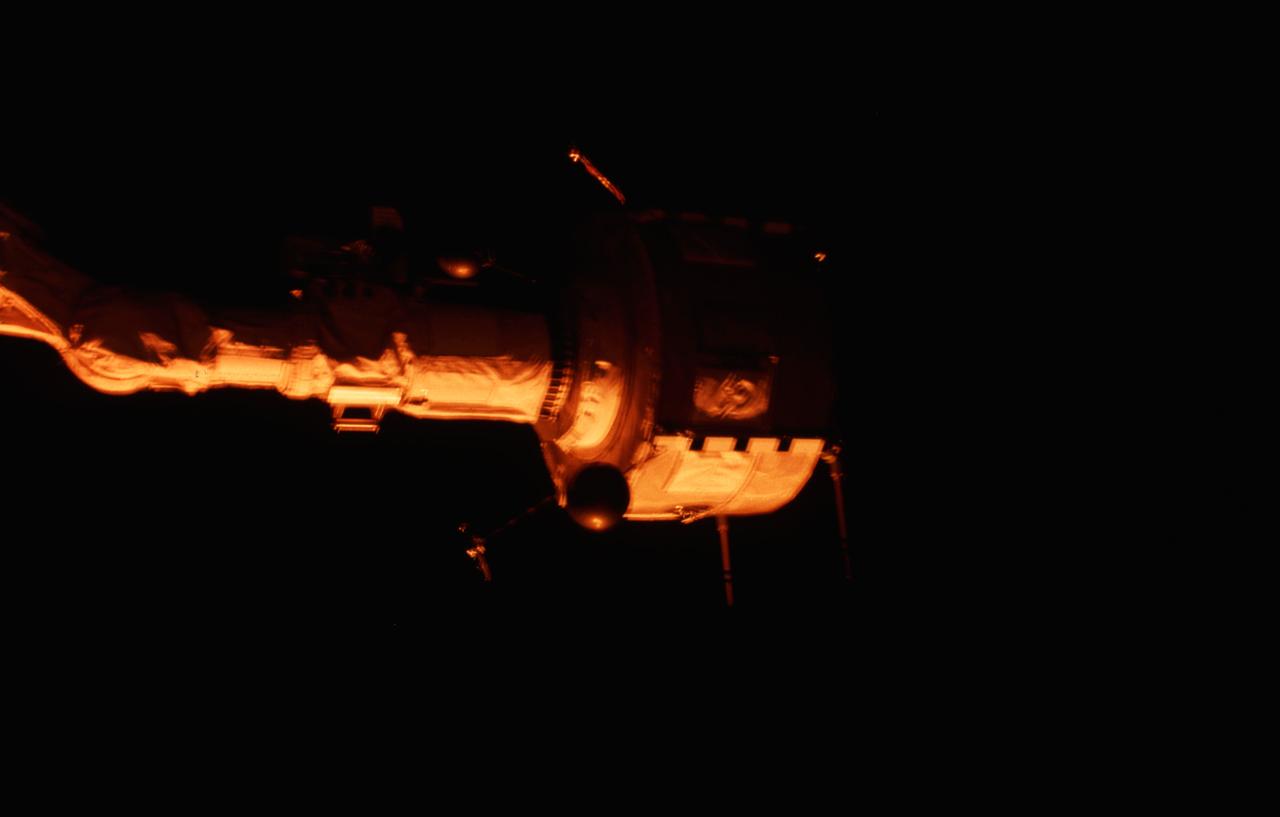
STS103-707-010 (19-27 December 1999) --- The end effector of the Remote Manipulator System (RMS, right center) on the Space Shuttle Discovery awaits the arrival of the approaching Hubble Space Telescope (HST, out of frame) prior to telescope capture.

STS080-708-065 (19 Nov.-7 Dec. 1996) --- Backdropped against part of Baja California, the Wake Shield Facility (WSF) is about to be re-berthed in the cargo bay of the Earth-orbiting space shuttle Columbia. Columbia's Remote Manipulator System (RMS) was used extensively during operations with the experiment.

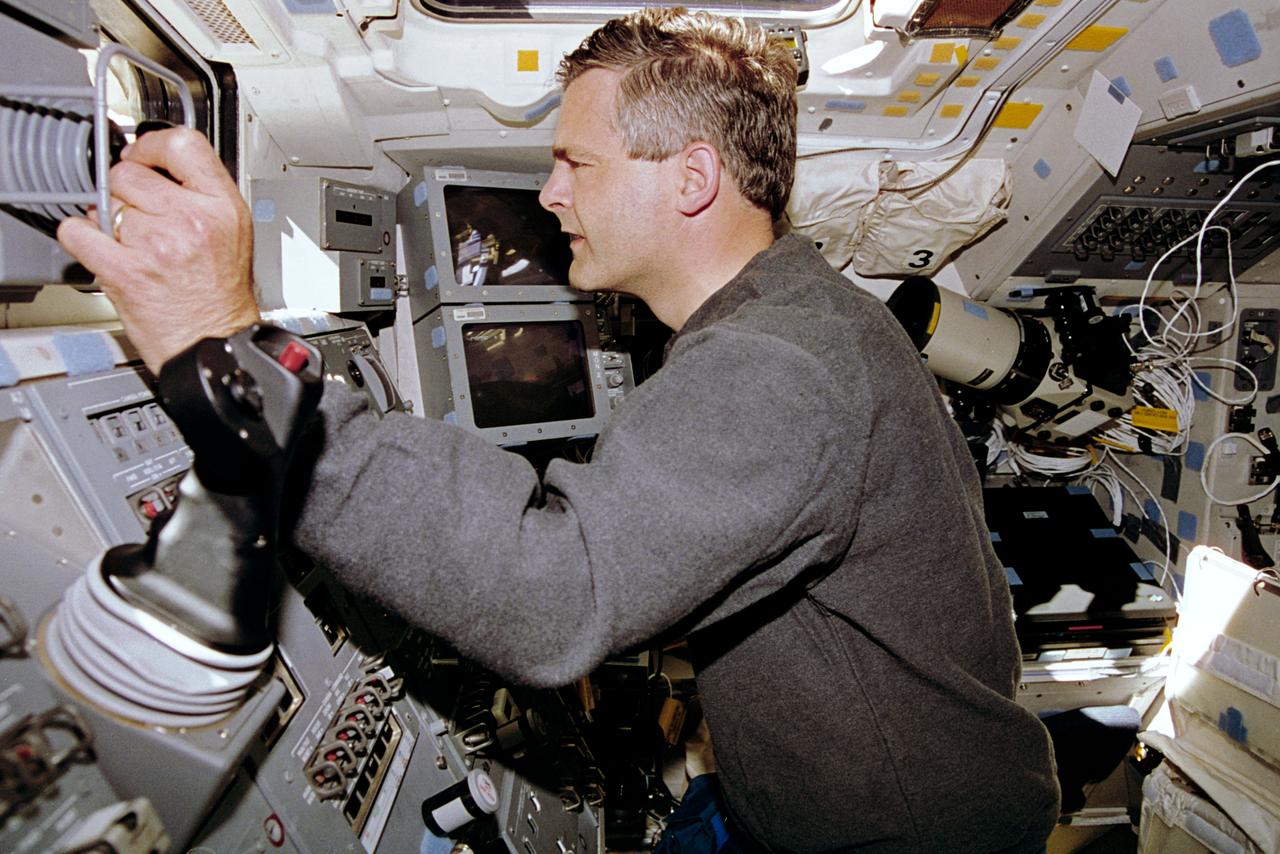
S82-E-5016 (12 Feb. 1997) --- Astronaut Steven A. Hawley, STS-82 mission specialist, controls Discovery's Remote Manipulation System (RMS), from the aft flight deck. Hawley and his crew mates are preparing for a scheduled Extravehicular Activity (EVA) with the Hubble Space Telescope (HST), which will be pulled into the Space Shuttle Discovery's cargo bay with the aid of the Remote Manipulator System (RMS). A series of EVA's will be required to properly service the giant telescope. Hawley served as a mission specialist on NASA's 1990 mission which was responsible for placing HST in Earth-orbit. This view was taken with an Electronic Still Camera (ESC).

STS109-E-5685 (7 March 2002) --- Astronaut Nancy J. Currie, mission specialist, works the controls for Columbia's Remote Manipulator System (RMS) on the crew cabin's aft flight deck. On a week with one lengthy space walk per day, Currie has had her hands full with RMS duties to support the space walks of four crewmates. Astronauts James H. Newman and Michael J. Massimino had just begin EVA-4, during which the duo required the services of Currie to control the robotic arm to maneuver them around the various workstations on the Hubble Space Telescope (HST). The image was recorded with a digital still camera.
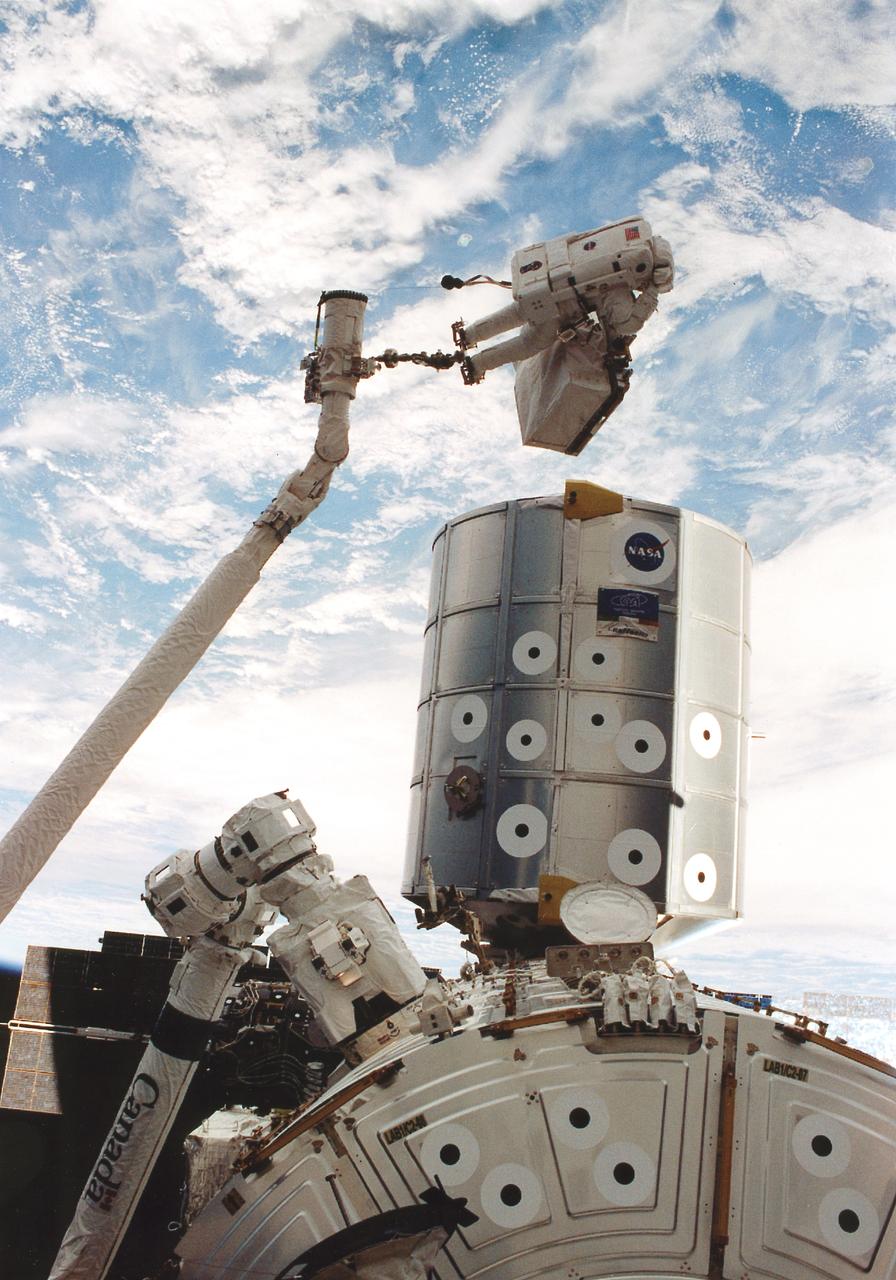
This is a Space Shuttle STS-100 mission onboard photograph. Astronaut Scott Parazynski totes a Direct Current Switching Unit while anchored on the end of the Canadian-built Remote Manipulator System (RMS) robotic arm. The RMS is in the process of moving Parazynski to the exterior of the Destiny laboratory (right foreground), where he will secure the spare unit, a critical part of the station's electrical system, to the stowage platform in case future crews will need it. Also in the photograph are the Italian-built Raffaello multipurpose Logistics Module (center) and the new Canadarm2 (lower right) or Space Station Remote Manipulator System.

S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS066-13-014 (3-14 Nov. 1994) --- On the space shuttle Atlantis' aft flight deck, astronaut Ellen Ochoa, payload commander, has just completed an operation at the controls for the Remote Manipulator System (RMS) arm while working in chorus with astronaut Donald R. McMonagle. McMonagle, mission commander, is seen here at his station on the forward flight deck. An RMS operations checklist floats in front of Ochoa. Photo credit: NASA

STS095-E-5138 (3 Nov. 2998) --- Astronaut Stephen K. Robinson, STS-95 mission specialist, at the controls of Discovery's remote manipulator system (RMS) robot arm. The Spartan 201-05 satellite can be seen in the grasp of the RMS at left. The photo was taken with an electronic still camera (ESC) at 03:55:25 GMT, Nov. 3.

S82-E-5014 (12 Feb. 1997) --- Space Shuttle Discovery's Remote Manipulator System (RMS) gets a preliminary workout in preparation for a busy work load later in the week. The crewmembers are preparing for a scheduled Extravehicular Activity (EVA) with the Hubble Space Telescope (HST), which will be pulled into the Space Shuttle Discovery's cargo bay with the aid of the Remote Manipulator System (RMS). A series of EVA's will be required to properly service the giant telescope. This view was taken with an Electronic Still Camera (ESC).

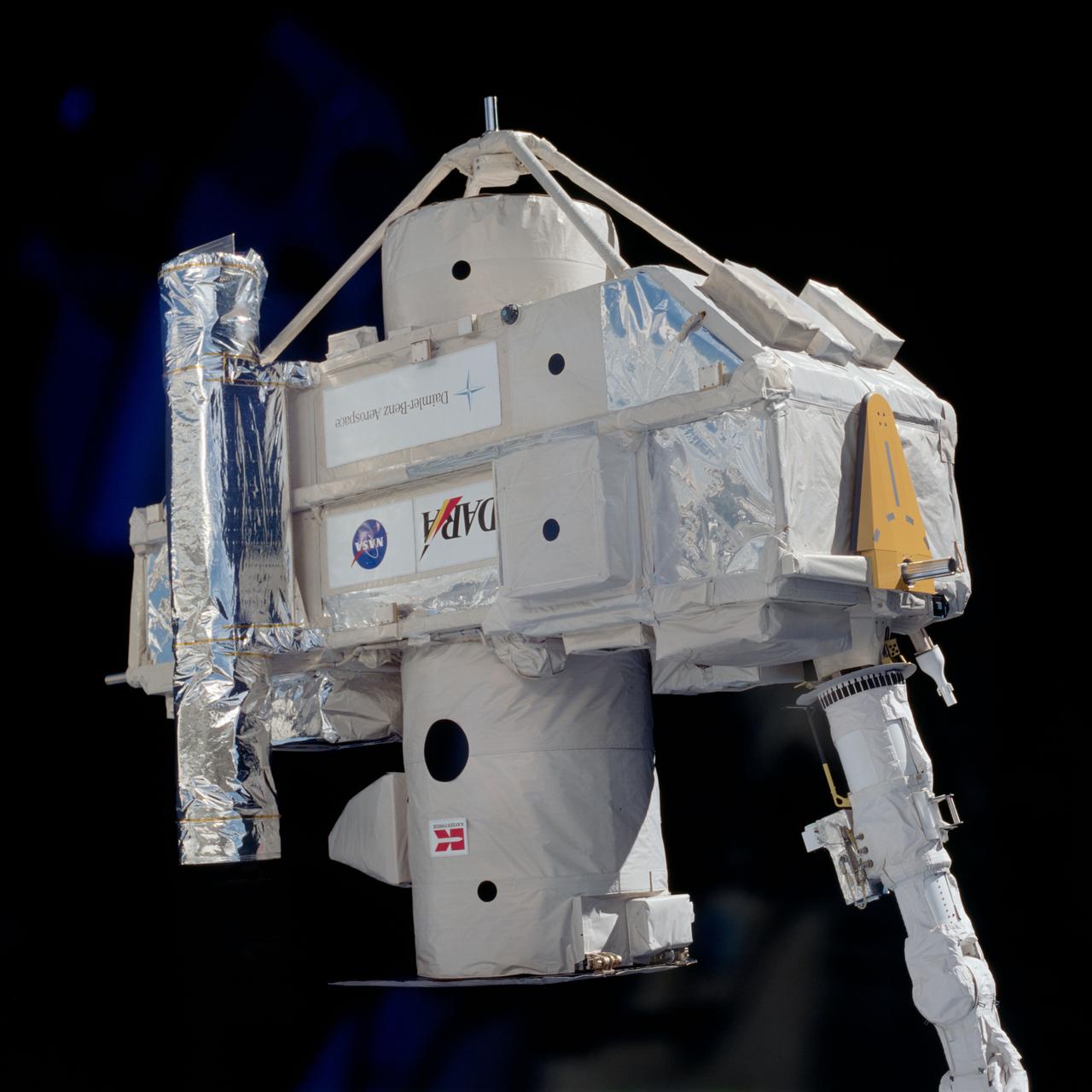
STS039-19-015 (28 April- 6 May 1991) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) on the end of the remote manipulator system (RMS) end effector. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS.

This view taken through overhead window W7 on Columbia's, Orbiter Vehicle (OV) 102's, aft flight deck shows the Long Duration Exposure Facility (LDEF) in the grasp of the remote manipulator system (RMS) during STS-32 retrieval activities. Other cameras at eye level were documenting the bus-sized spacecraft at various angles as the RMS manipulated LDEF for a lengthy photo survey. The glaring celestial body in the upper left is the sun with the Earth's surface visible below.

STS096-378-021 (27 May - 6 June 1999) --- Astronaut Julie Payette, mission specialist representing the Candian Space Agency (CSA), operates the Canadian-built remote manipulator system (RMS) from Discovery's aft flight deck. Television monitors nearby afford Payette two different angles of the cargo bay.
STS080-704-008 (19 Nov.-7 Dec. 1996) --- Backdropped against the blackness of space, the ORPHEUS - Shuttle Pallet Satellite (SPAS) spacecraft is held in the grasp of the space shuttle Columbia's Remote Manipulator System (RMS) during deploy operations in Earth-orbit.

ISS011-E-11414 (2 August 2005) --- A line of thunderstorms form the backdrop for this view of the extended Space Shuttle Discovery’s remote manipulator system (RMS) robotic arm while docked to the International Space Station during the STS-114 mission.

STS109-E-5625 (5 March 2002) --- Astronaut Nancy J. Currie, mission specialist, controls the Remote Manipulator System (RMS) robotic arm of the Space Shuttle Columbia as two astronauts perform work on the Hubble Space Telescope (HST), temporarily hosted in the shuttle's cargo bay. The image was recorded with a digital still camera.

S133-E-009053 (6 March 2011) --- Backdropped by Earth’s horizon and the blackness of space, space shuttle Discovery and its remote manipulator system/orbiter boom sensor system (RMS/OBSS) is featured in this image photographed by an STS-133 crew member while docked with the International Space Station. Photo credit: NASA or National Aeronautics and Space Administration

S83-33925 (14 June 1983) --- Astronaut Ronald E. McNair, one of NASA?s three 41-B mission specialists, participates in a training session in the Shuttle one-g trainer in the Johnson Space Center?s mockup and integrating laboratory. He stands at the aft flight deck, where controls for the remote manipulator system (RMS) arm are located. Dr. McNair and the remainder of the five-man astronaut crew are scheduled to lift into space aboard the Challenger on February 3, 1984.

STS064-72-093 (10 Sept. 1994) --- With the blue and white Earth as a backdrop 130 miles below, the Shuttle Plume Impingement Flight Experiment (SPIFEX) is at work on the end of the Remote Manipulator System (RMS) arm. The 50-feet-long arm is extended to 80 feet with the temporary addition of the SPIFEX hardware. The image was exposed with a 70mm handheld Hasselblad camera from inside the space shuttle Discovery's crew cabin. Photo credit: NASA or National Aeronautics and Space Administration

41C-36-1618 (7 April 1984) --- The Remote Manipulator System (RMS) arm suspends the giant Long Duration Exposure Facility (LDEF) high above the Gulf of Mexico prior to releasing it into space. Carried into Earth orbit with the STS-41C crew by the Space Shuttle Challenger, LDEF will remain in space until retrieved by a future Shuttle mission, in nine or ten months. Florida and the Bahama Banks are visible near the Earth's horizon in the 70mm frame.

51D-04-015 (15 April 1985) --- Astronaut Rhea Seddon and Karol J. Bobko continue work on snag-type extension for the Remote Manipulator System (RMS) as part of an effort to activate a lever on a troubled communications satellite. Since the crew learned soon after deployment of the Syncom IV (LEASAT) spacecraft that it was not functioning properly plans were formulated for a rendezvous in space between the Discovery and the satellite. A fly swatter-like extension and another resembling a LaCrosse stick were fashioned from onboard supplies and furnishings. Stowage lockers nearby serve as a work bench for the two. At various times during the seven-day mission, the majority of the seven-member crew participated in the tool-making and preparations for an extravehicular activity (EVA) by the flights other two mission specialists -- Jeffrey A. Hoffman and S. David Griggs -- to connect the two tools to the RMS. Bobko is mission commander and Dr. Seddon, a mission specialist.

STS080-762-049 (19 Nov.-7 Dec. 1996) --- Taken with a 70mm handheld camera, this photograph captures the berthing by the space shuttle Columbia's Remote Manipulator System (RMS) of the Wake Shield Facility (WSF).

STS097-316-002 (30 Nov. - 11 Dec. 2000) Astronaut Marc Garneau, mission specialist representing the Canadian Space Agency (CSA), works the controls for Endeavour's remote manipulator system (RMS).
STS003-21-080 (22-30 March 1982) --- Plasma Diagnostics Package (PDP) grappled by remote manipulator system (RMS) end effector is positioned above payload bay (PLB) at sunrise. Photo credit: NASA

Cosmonaut Sergei Krikalev, STS-60 mission specialist, practices operating the Shuttle's Remote Manipulator System (RMS) during a training exercise at JSC's Shuttle mockup and integration laboratory.

STS069-714-063 (16 September 1995) --- Astronaut James S. Voss, payload commander, is pictured during the September 16, 1995, Extravehicular Activity (EVA) which was conducted in and around Space Shuttle Endeavour's cargo bay. Voss, whose visor reflects Endeavour's forward section, was standing on a mobile foot restraint attached to the arm of the Remote Manipulator System (RMS). As evidenced by the thin white cable, Voss was tethered to the end of the RMS as well. Evaluations for Space Station-era tools and various elements of the space suits were performed by Voss and his space walking crewmate, astronaut Michael L. Gernhardt, mission specialist.
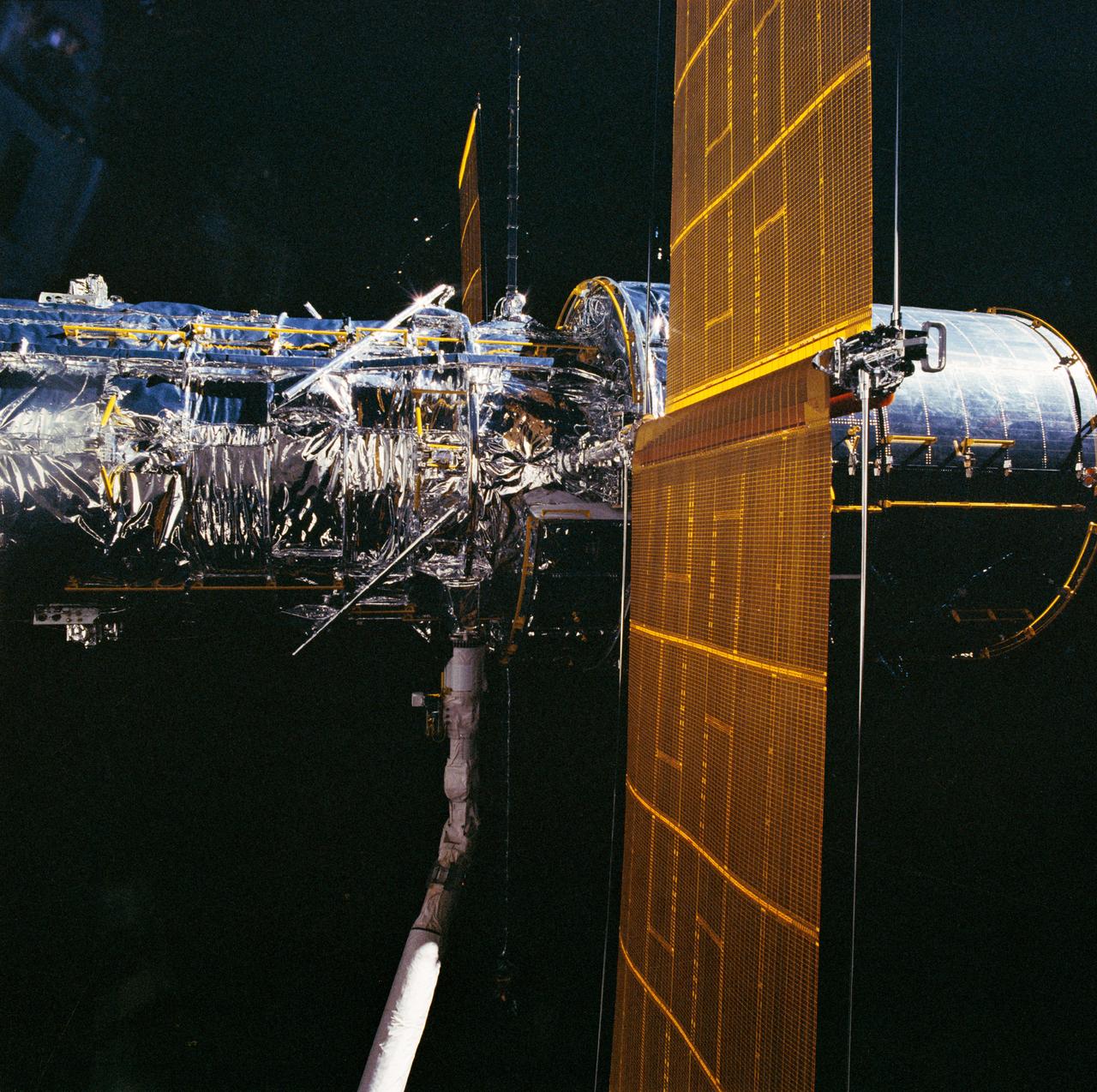
During STS-31, the Hubble Space Telescope (HST), grappled by the remote manipulator system (RMS) end effector, is held against the blackness of space. The two solar array (SA) wings (large gold panels) are fully extended with bistem cassette and secondary deployment mechanism (SDM) handle clearly visible. The two deployed high gain antennae (HGA) masts are parallel to the SA panels. RMS end effector is positioned on the starboard fixture during the predeployment checkout operations above Discovery's, Orbiter Vehicle (OV) 103's, payload bay (PLB).

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves nearer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves closer to the payload canister where it will be installed for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, the Special Purpose Dexterous Manipulator, known as Dextre, moves across the facility via an overhead crane to the payload canister at right for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

KENNEDY SPACE CENTER, FLA. -- In the Space Station Processing Facility at NASA's Kennedy Space Center, an overhead crane moves the Special Purpose Dexterous Manipulator, known as Dextre, to the payload canister for transfer to Launch Pad 39A. Dextre is a sophisticated dual-armed robot, which is part of Canada's contribution to the International Space Station. Along with Canadarm2, which is called the Space Station Remote Manipulator System, and a moveable work platform called the Mobile Base System, these three elements form a robotic system called the Mobile Servicing System. The three components have been designed to work together or independently. Dextre is part of the payload on space shuttle Endeavour's STS-123 mission, targeted for launch March 11. Photo courtesy of The Boeing Company

STS061-23-037 (2-13 Dec 1993) --- ESA astronaut Claude Nicollier, mission specialist, is stationed on the Space Shuttle Endeavour's flight deck during one of the five Hubble Space Telescope (HST) servicing space walks. The controls for the Remote Manipulator System (RMS), which played an important role in the space walks, are left of frame center. Two space walkers can be seen through the aft windows.

STS087-706-020 (19 November – 5 December 1997) --- The Spartan 201 satellite, held in the grasp of the Space Shuttle Columbia's Remote Manipulator System (RMS) arm, is backdropped over white clouds and blue waters of the Pacific Ocean. Long Island, off the coast of Papua New Guinea, is barely visible in the lower left corner.

STS080-708-084 (19 Nov.-7 Dec. 1996) --- Backdropped against the blackness of space and a cloud covered portion of Earth, the Wake Shield Facility (WSF) is turned loose by the space shuttle Columbia's Remote Manipulator System (RMS) to begin a period of free-flight. The image was photographed with a handheld 70mm camera aimed through windows on Columbia's aft flight deck.

S116-E-07008 (18 Dec. 2006) --- As seen through windows on the aft flight deck of Space Shuttle Discovery, the Remote Manipulator System (RMS) is featured in this image photographed by a STS-116 crewmember during flight day ten activities while Discovery was docked with the International Space Station. The blackness of space, Earth's horizon and airglow provide the backdrop for the scene.

STS095-E-5027 (10-29-98) Astronaut Pedro Duque, mission specialist representing the European Space Agency (ESA)looks over notes on the Discovery's aft flight deck during Flight Day 1 activities. At left frame are controls for the remote manipulator system (RMS) and part of the frame of one of the windows overlooking the cargo bay, where the Spartan 201 satellite is berthed. The photo was taken at 11:30:18 GMT, Oct. 29.

ISS020-E-037863 (2 Sept. 2009) --- NASA astronaut Nicole Stott and European Space Agency astronaut Frank De Winne, both Expedition 20 flight engineers, work at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station while Space Shuttle Discovery remains docked with the station.

STS105-343-004 (18 August 2001) --- Astronaut Daniel T. Barry, STS-105 mission specialist, is pictured near the end of the Space Shuttle Discovery's remote manipulator system (RMS) arm during early stages of the second extravehicular activity of the STS-105 mission. Astronauts Barry and Patrick G. Forrester shared two days of space walk duties working on the International Space Station (ISS), to which Discovery was docked for several days.
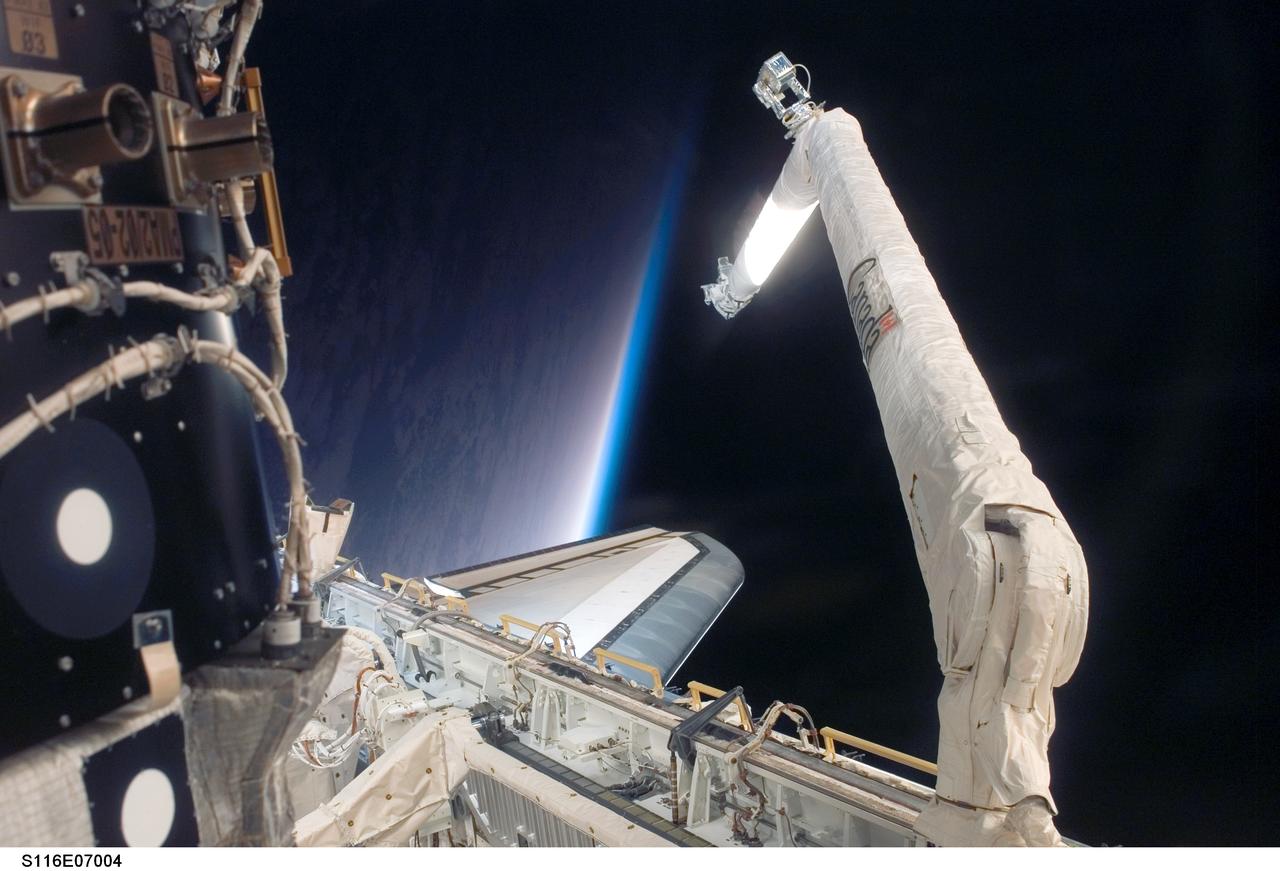
S116-E-07004 (18 Dec. 2006) --- As seen through windows on the aft flight deck of Space Shuttle Discovery, the Remote Manipulator System (RMS) is featured in this image photographed by a STS-116 crewmember during flight day ten activities while Discovery was docked with the International Space Station. The blackness of space, Earth's horizon and airglow provide the backdrop for the scene.

STS105-343-010 (18 August 2001) --- Backdropped over the blue and white Earth, astronaut Daniel T. Barry, STS-105 mission specialist, is pictured near the end of the Space Shuttle Discovery's remote manipulator system (RMS) arm during early stages of the second extravehicular activity of the STS-105 mission. Astronauts Barry and Patrick G. Forrester shared two days of space walk duties working on the International Space Station (ISS), to which Discovery was docked for several days.

STS077-307-020 (19-29 May 1996) --- Astronaut Mario Runco, Jr., mission specialist, is pictured at the controls for the Remote Manipulator System (RMS) on the aft flight deck of the Space Shuttle Endeavour. Runco and five other astronauts went on to spend almost ten days aboard Endeavour in support of the Spacehab 4 mission and a number of other payloads.

S131-E-007442 (6 April 2010) --- The Leonardo Multi-Purpose Logistics Module (MPLM) visible in space shuttle Discovery's payload bay, docking mechanism, vertical stabilizer, orbital maneuvering system (OMS) pods and Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) are featured in this image photographed by an STS-131 crew member from an aft flight deck window during flight day two activities. Earth?s horizon and the blackness of space provide the backdrop for the scene.
STS077-307-017 (19-29 May 1996) --- Astronaut Marc Garneau, mission specialist, is pictured at the controls for the Remote Manipulator System (RMS) on the aft flight deck of the Space Shuttle Endeavour. Garneau, representing the Canadian Space Agency (CSA), and five other astronauts went on to spend almost ten days aboard Endeavour in support of the Spacehab 4 mission and a number of other payloads.

61B-41-019 (26 Nov. ? 3 Dec. 1985) --- Astronaut Jerry L. Ross, one of NASA flight 6l-B's mission specialists, approaches a tower device just erected by Ross and astronaut Sherwood (Woody) C. Spring during the second of two extravehicular activities. The tower was called Assembly Concept for Construction of Erectable Space Structures. Ross is secured on a foot restraint device connected to the Canadian-built remote manipulator system (RMS) arm aboard the Earth orbiting Atlantis.

STS095-E-5028 (10-29-98) Astronaut Pedro Duque, mission specialist representing the European Space Agency (ESA),looks over notes on the Discovery's aft flight deck during Flight Day 1 activities. At left frame are controls for the remote manipulator system (RMS). A small section of Earth's horizon can be seen through the overhead window. The photo was taken at 11:30:24 GMT, Oct. 29.

ISS020-E-037868 (2 Sept. 2009) --- NASA astronaut Nicole Stott and European Space Agency astronaut Frank De Winne, both Expedition 20 flight engineers, work at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station while Space Shuttle Discovery remains docked with the station.
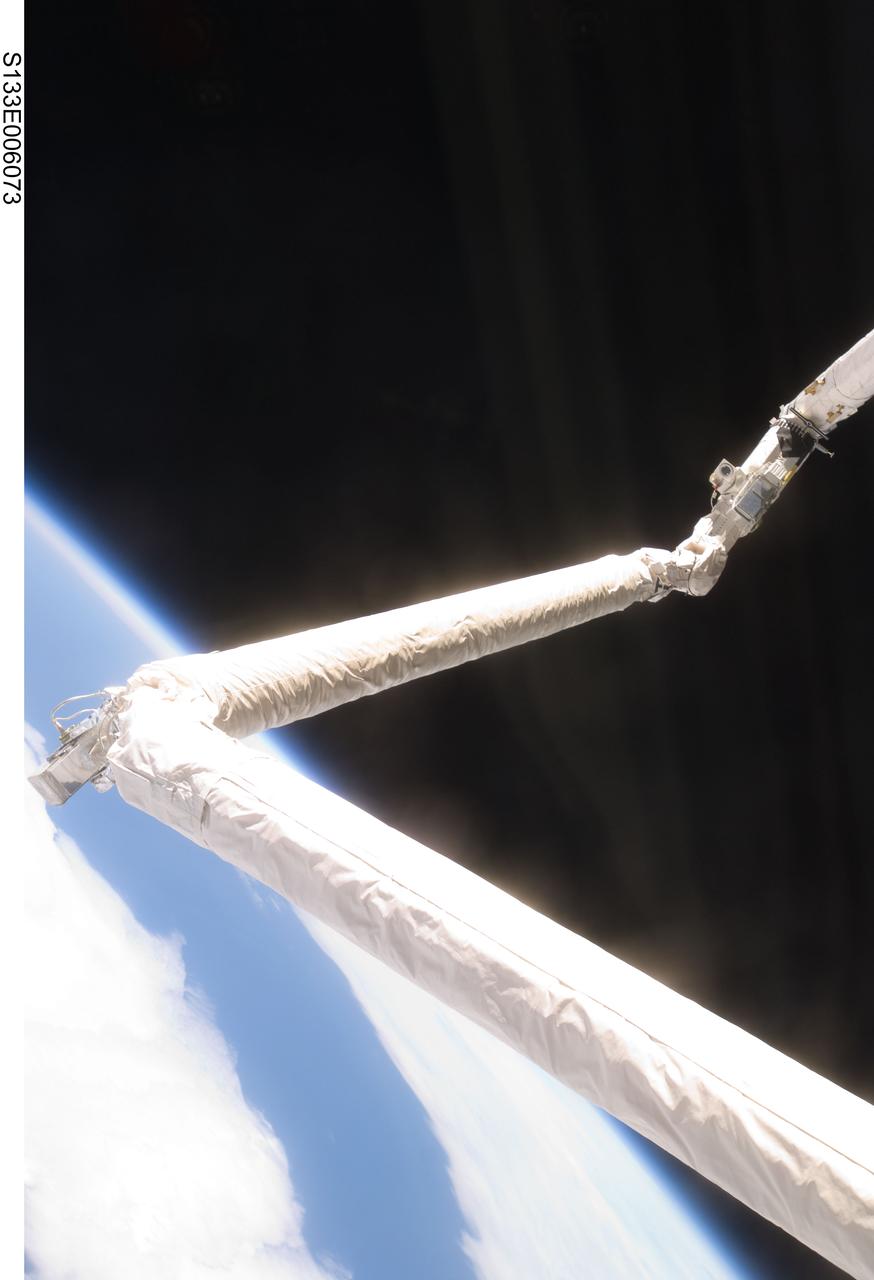
S133-E-006073 (25 Feb. 2011) --- Controlled by the STS-133 astronauts inside Discovery's cabin, the Remote Manipulator System/Orbiter Boom Sensor System (RMS/OBSS) equipped with special cameras, begins to conduct thorough inspections of the shuttle’s thermal tile system on flight day 2. Photo credit: NASA or National Aeronautics and Space Administration

61B-102-022 (1 Dec 1985) --- Astronaut Jerry L. Ross, anchored to the foot restraint on the remote manipulator system (RMS), holds onto the tower-like Assembly Concept for Construction of Erectable Space Structures (ACCESS) device, as the Atlantis flies over white clouds and blue ocean waters. The frame was exposed with a negative-equipped camera held by Astronaut Sherwood C. Spring, who was also on the EVA-task.

S100-E-5219 (22 April 2001) --- The Spacelab Pallet that contain Canadarm2 and the UHF antenna that are to be installed during the first scheduled space walk on STS-100 is seen in the grasp of the Canadian-built Remote Manipulator System (RMS) robot arm on the Space Shuttle Endeavour. The scene was recorded with a digital still camera.

ISS018-E-044131 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a computer at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

ISS018-E-044134 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a computer at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

JSC2000-E-16591 (15 June 2000) --- Astronaut Scott D. Altman, STS-106 pilot, simulates control of the remote manipulator system (RMS) for the Space Shuttle Discovery during a training session in the Johnson Space Center's Systems Integration Facility. In this scenario, the shuttle is docked to the International Space Station.
Simulation activities with the RMS in Bldg. 9A, with Astronaut Sally Ride testing the feasibility of the "Flyswatter" design for the STS-23/51D Mission on 04/15/16/1985. 1. STS-23/51D - Crew Training (Flyswatter) 2. Shuttle - Simulation (Flyswatter) JSC, Houston, TX

S115-E-05307 (10 Sept. 2006) --- As in the case of the previous two shuttle missions, a tandem of the orbiter boom sensor system (OBSS) and the remote manipulator system (RMS) arm conducts a survey of the thermal protection system on the Space Shuttle Atlantis.

JSC2000-E-16589 (15 June 2000) --- Astronaut Scott D. Altman, STS-106 pilot, simulates control of the remote manipulator system (RMS) for the Space Shuttle Atlantis during a training session in the Johnson Space Center's Systems Integration Facility.
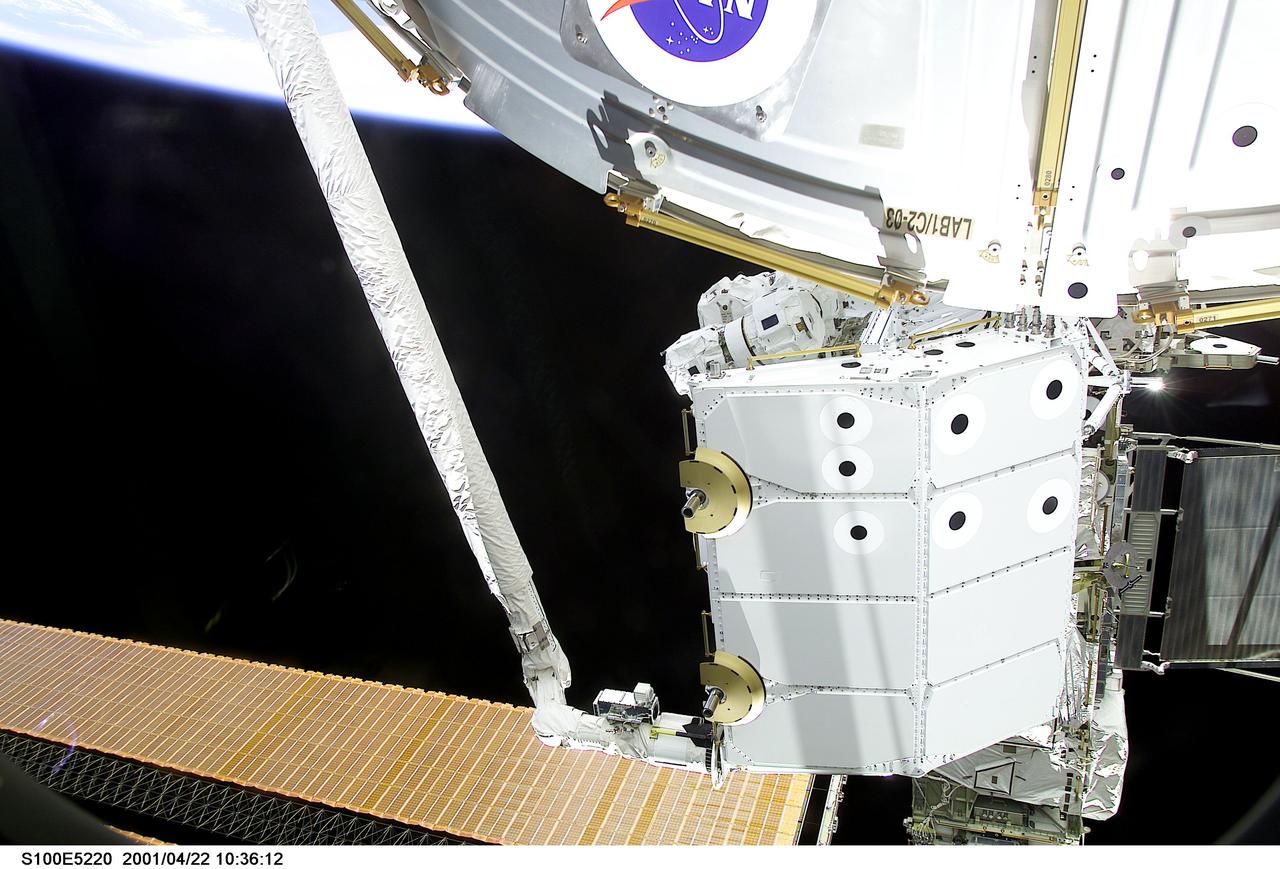
S100-E-5220 (22 April 2001) --- The pallet that contains Canadarm2 and the UHF antenna that are to be installed during the first scheduled space walk on STS-100 is seen in the grasp of the Canadian-built Remote Manipulator System (RMS) robot arm on the Space Shuttle Endeavour. The scene was recorded with a digital still camera.

JSC2000-E-16588 (15 June 2000) --- Astronaut Scott D. Altman, STS-106 pilot, simulates control of the remote manipulator system (RMS) for the Space Shuttle Atlantis during a training session in the Johnson Space Center's Systems Integration Facility.

ISS018-E-044145 (31 March 2009) --- Japan Aerospace Exploration Agency (JAXA) astronaut Koichi Wakata, Expedition 18/19 flight engineer, uses a communication system at the Japanese Remote Manipulator System (JEM-RMS) work station in the Kibo laboratory of the International Space Station.

Simulation activities with the RMS in Bldg. 9A, with Astronaut Sally Ride testing the feasibility of the "Flyswatter" design for the STS-23/51D Mission on 04/15/16/1985. 1. STS-23/51D - Crew Training (Flyswatter) 2. Shuttle - Simulation (Flyswatter) JSC, Houston, TX
Simulation activities with the RMS in Bldg. 9A, with Astronaut Sally Ride testing the feasibility of the "Flyswatter" design for the STS-23/51D Mission on 04/15/16/1985. 1. STS-23/51D - Crew Training (Flyswatter) 2. Shuttle - Simulation (Flyswatter) JSC, Houston, TX
S100-E-5221 (22 April 2001) --- The pallet that contains Canadarm2 and the UHF antenna that are to be installed during the first scheduled space walk on STS-100 is seen in the grasp of the Canadian-built Remote Manipulator System (RMS) robot arm on the Space Shuttle Endeavour. The Destiny laboratory is seen in the foreground of the digital still camera's image.

STS032-544-010 (12 Jan 1990) --- Canadian-built RMS suspends LDEF over cargo bay during extensive in-space survey.

STS057-84-000AD (24 June 1993) --- The recently "captured" European Retrievable Carrier (EURECA) was recorded on 70mm film as it was berthed in the Space Shuttle Endeavour's aft cargo bay, assisted by the Canadian-built Remote Manipulator System (RMS), partially visible in upper right. Moments later the RMS eased EURECA into its stowage area between Endeavour's aft cargo bay firewall and the SpaceHab module (partially visible in foreground).

STS066-96-030 (3-14 Nov 1994) --- Masses of clouds serve as the backdrop for this close-up 70mm scene of the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere (CRISTA), attached to the Shuttle Pallet Satellite (SPAS). CRISTA-SPAS was in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) arm. The crew deployed the CRISTA-SPAS on November 4, 1994 and the spacecraft remained in free-flight until November 12, 1994 when it was retrieved by the Canadian-built RMS, controlled by payload commander Ellen Ochoa. Other crew members onboard Atlantis were astronauts Donald R. McMonagle, Curtis L. Brown, Jr., Scott E. Parazynski and Joseph R. Tanner, along with Jean-Francois Clervoy of ESA. The six astronauts spent 11-days in Earth-orbit in support of the Atmospheric Laboratory for Applications and Science (ATLAS-3) mission.

S84-40162 (21 Aug. 1984) --- Astronaut Anna L. Fisher controls the Remote Manipulator System (RMS) arm from inside the "orbiter" as part of her training program in the Johnson Space Center's Shuttle Mock-up and Integration Laboratory. Dr. Fisher, one of three mission specialists for mission 51-A, is inside the cabin portion of a trainer called the Manipulatory Development Facility (MDF). She is able to operate the arm in conjunction with an air bearing floor and to log a great deal of rehearsal time for her flight, on which the retrieval of a low-orbiting communications satellite is planned. Photo credit: NASA

S103-E-5294 (23 Dec. 1999) --- Astronaut C. Michael Foale, standing on the end of Discovery's remote manipulator system (RMS), which had hoisted him to a task station on the Hubble Space Telescope (HST), uses a tool during the second spacewalk for the STS-103 mission. Astronauts Foale and Claude Nicollier are the second pair of STS-103 mission specialists to abandon the shirt-sleeve environment of Discovery's cabin for several hours' tasks on this the third NASA servicing mission to HST. The photo was taken with an electronic still camera (ESC). Photo credit: NASA