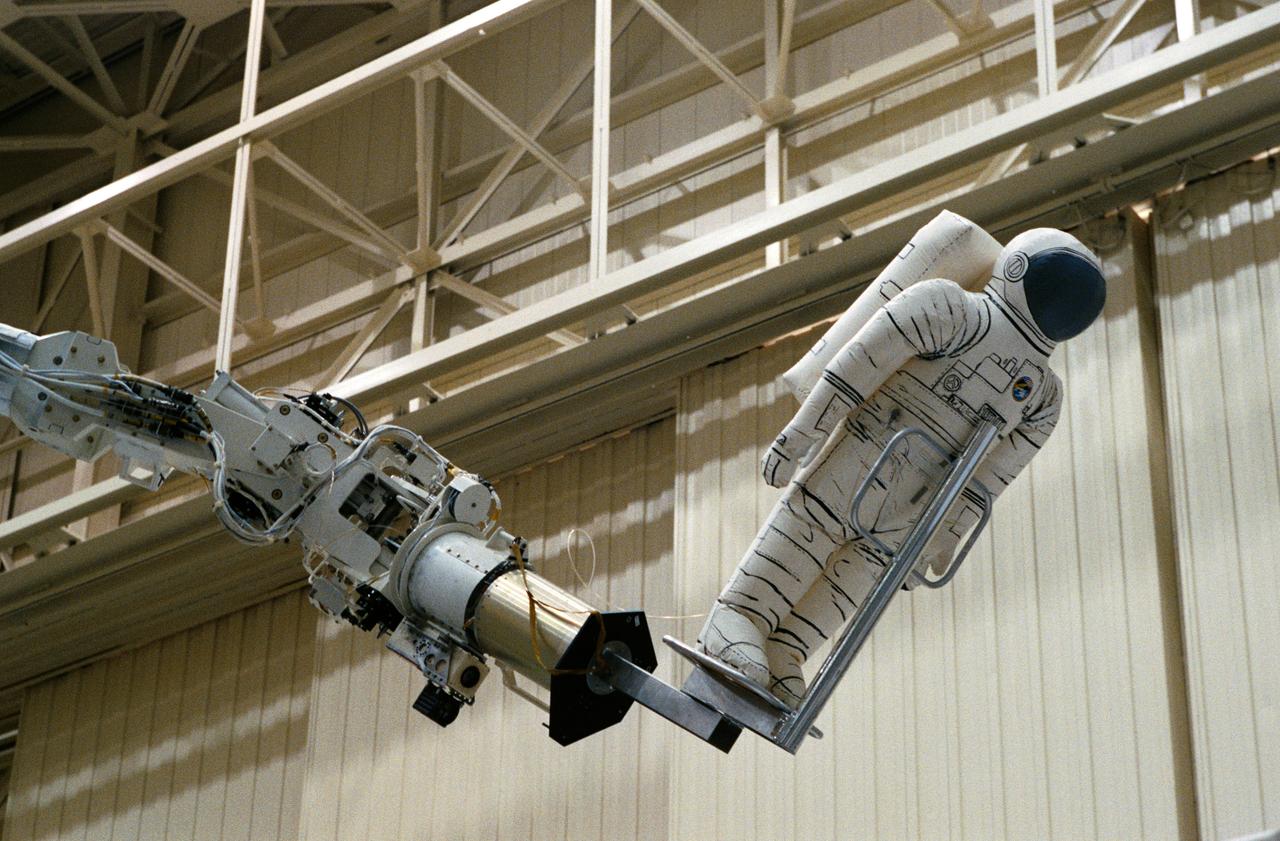
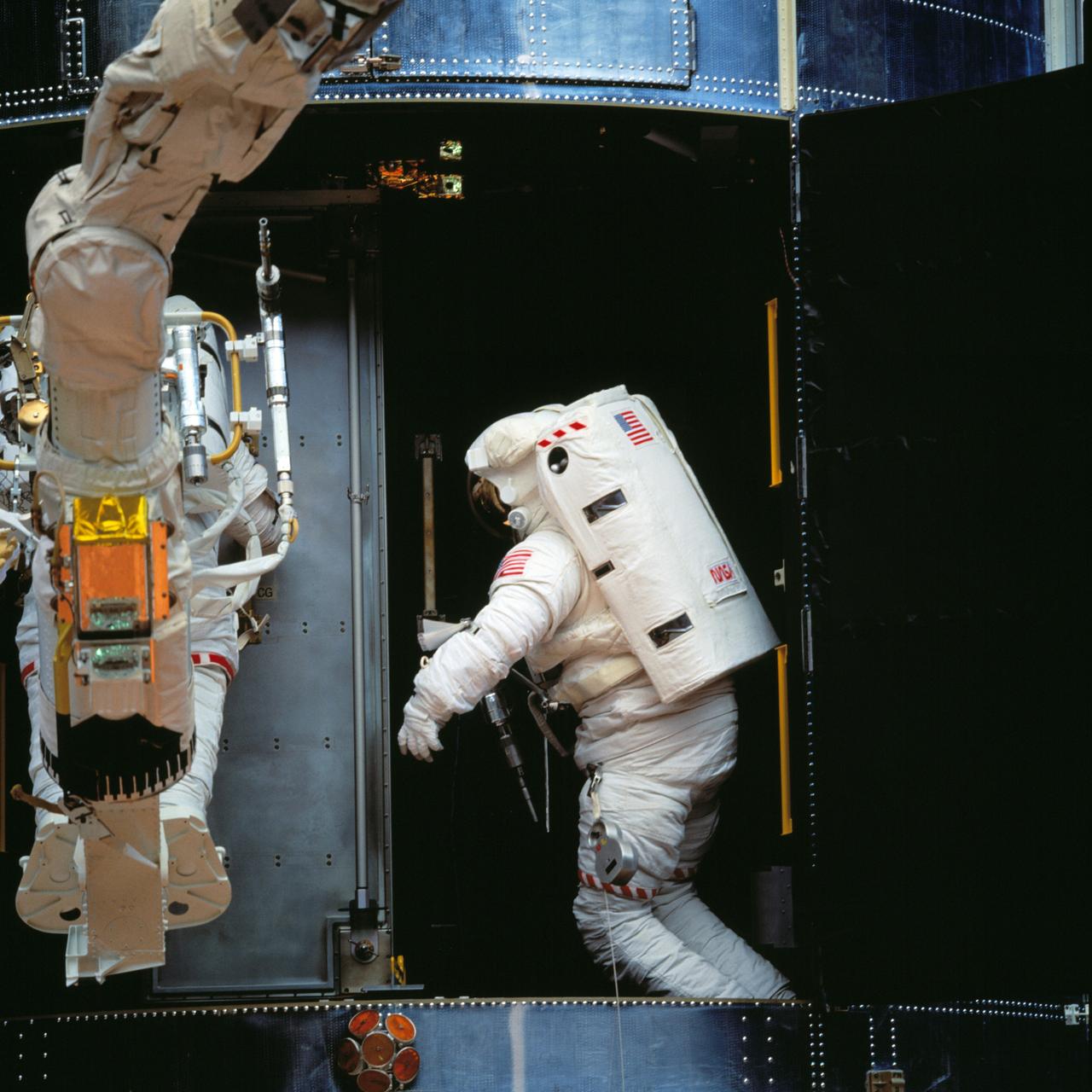
The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).

The Remote Manipulator System (RMS) eases a mannequin representing an astronaut into position for an STS-61 Hubble Space Telescope (HST) servicing task in the Space Shuttle mockup and integration laboratory at JSC (35699, 35703); Wide-angle view of the RMS easing a mannequin into position for work on the HST mock-up in bldg 9N (35700-1); Swiss scientist Claude Nicollier, mission specialist, works the control of the RMS during a training session in the manipulator development facility (MDF) in JSC's Shuttle mock-up and integration laboratory. Astronaut Kenneth D. Bowersox (left), pilot, is among the other crewmembers in training for the STS-61 HST servicing mission (35702).
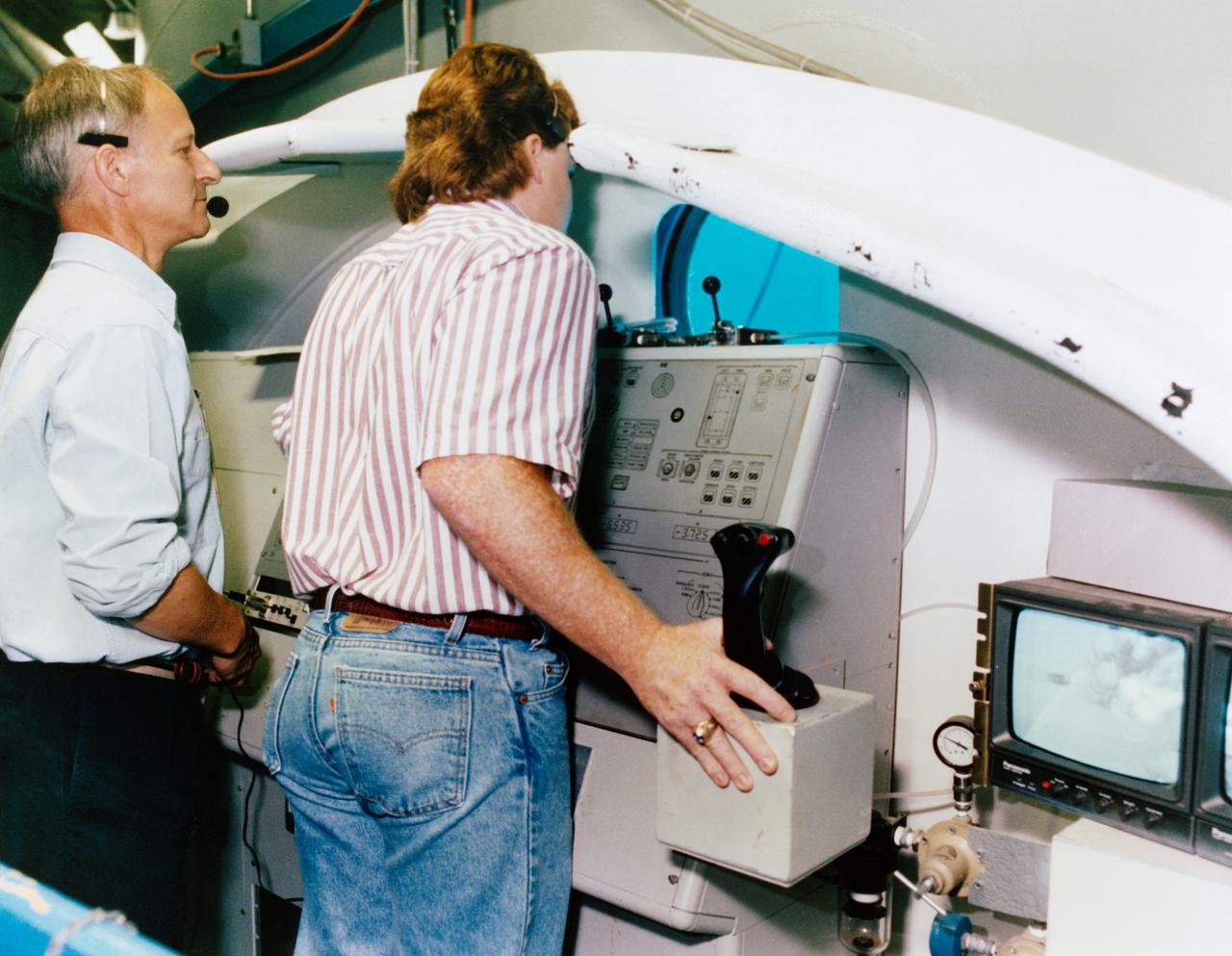
Swiss scientits Claude Nicollier (left), STS-61 mission specialist, waits his turn at the controls for the remote manipulator system (RMS) during a training session in the Neutral Buoyancy Simulator at Marshall Space Flight Center (MSFC). Mark Norman of MSFC has control of the RMS in this frame.

STS061-07-003 (4 Dec 1993) --- Swiss astronaut Claude Nicollier is pictured at the aft flight deck station he occupied during much of the time on NASA's STS-61 mission aboard the Space Shuttle Endeavour. Among Nicollier's responsibilities were the control of the Remote Manipulator System (RMS) during operations with the Hubble Space Telescope (HST).

STS061-86-030 (4 Dec 1993) --- The Hubble Space Telescope (HST) is pictured in the Space Shuttle Endeavour's cargo bay following its capture and berthing early in the eleven-day STS-61 mission. The Remote Manipulator System (RMS) arm, with television cameras mounted on it, was maneuvered from inside the cabin in order to survey HST. Five days of space walks followed, during which a variety of servicing tasks were performed by four crew members.

STS061-73-040 (4 Dec 1993) --- Backdropped against the blackness of space, the Hubble Space Telescope (HST) nears the Space Shuttle Endeavour. With the aid of the Remote Manipulator System (RMS), the STS-61 crew members later grappled the spacecraft and berthed it in the cargo bay for five-days of servicing chores by four space walkers.

STS061-23-037 (2-13 Dec 1993) --- ESA astronaut Claude Nicollier, mission specialist, is stationed on the Space Shuttle Endeavour's flight deck during one of the five Hubble Space Telescope (HST) servicing space walks. The controls for the Remote Manipulator System (RMS), which played an important role in the space walks, are left of frame center. Two space walkers can be seen through the aft windows.

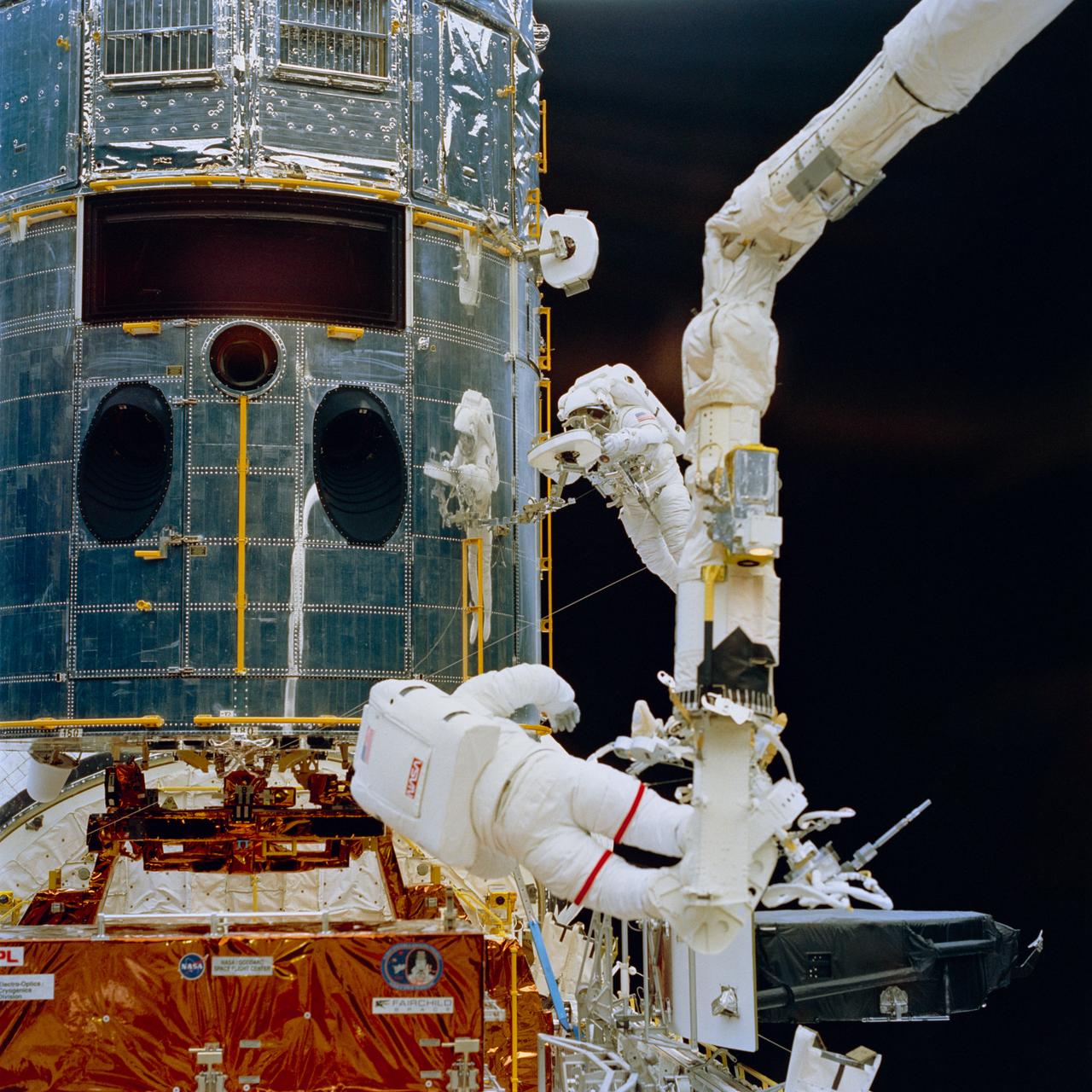
STS061-95-028 (6 Dec 1993) --- Astronaut Kathryn C. Thornton, on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, hovers over equipment associated with servicing chores on the Hubble Space Telescope (HST) during the second extravehicular activity (EVA) on the eleven-day mission. Astronauts Thornton and Thomas D. Akers changed out the solar array panels during this EVA.

STS061-105-024 (2-13 Dec. 1993) --- One of Endeavour's space walkers captured this view of Endeavour backdropped against the blackness of space, with the Sun displaying a rayed effect. The extended Remote Manipulator System (RMS) arm that the astronaut was standing on is seen on the left side of the view.
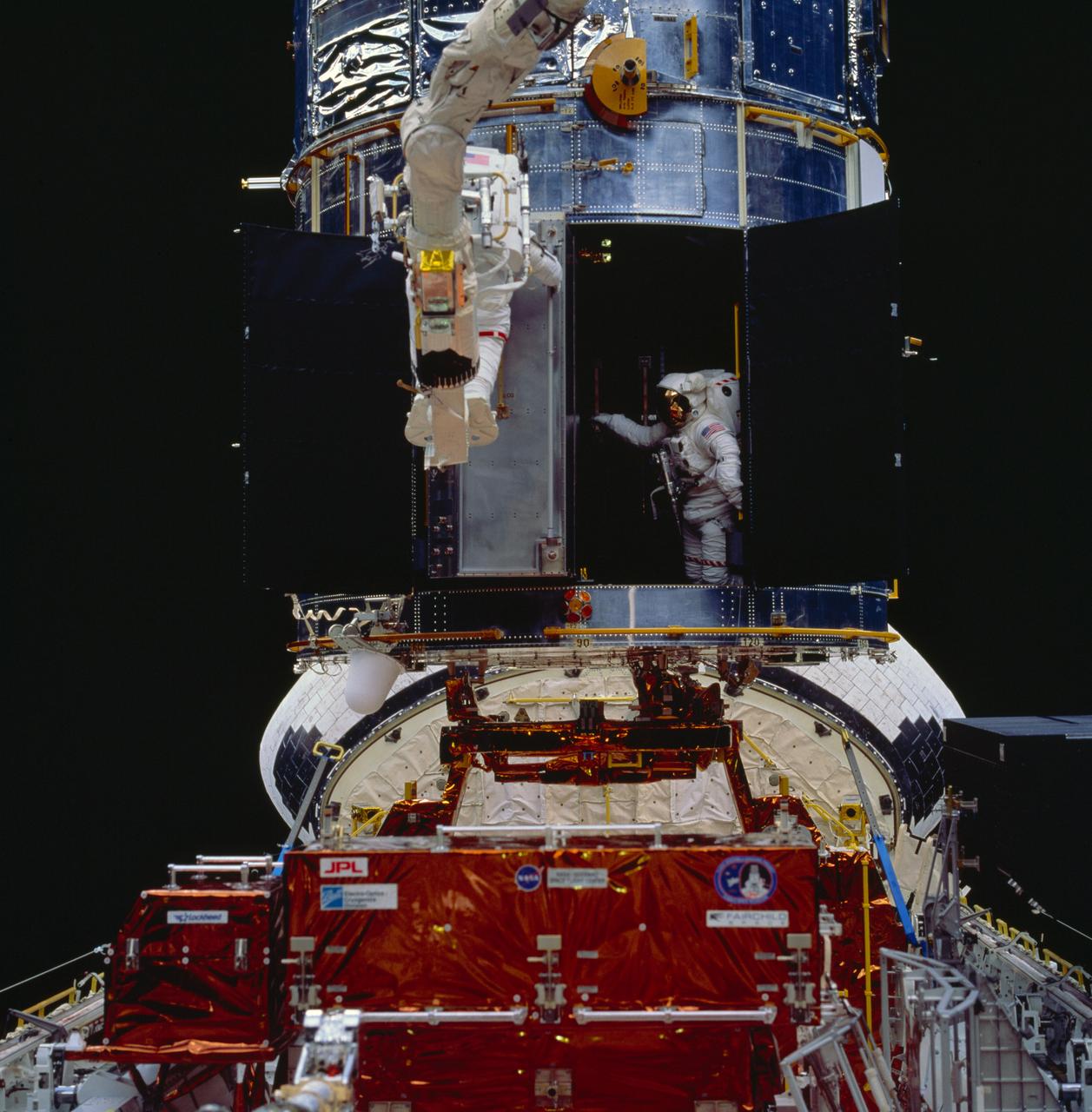
STS061-94-050 (8 Dec 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR, during their extravehicular activity (EVA).

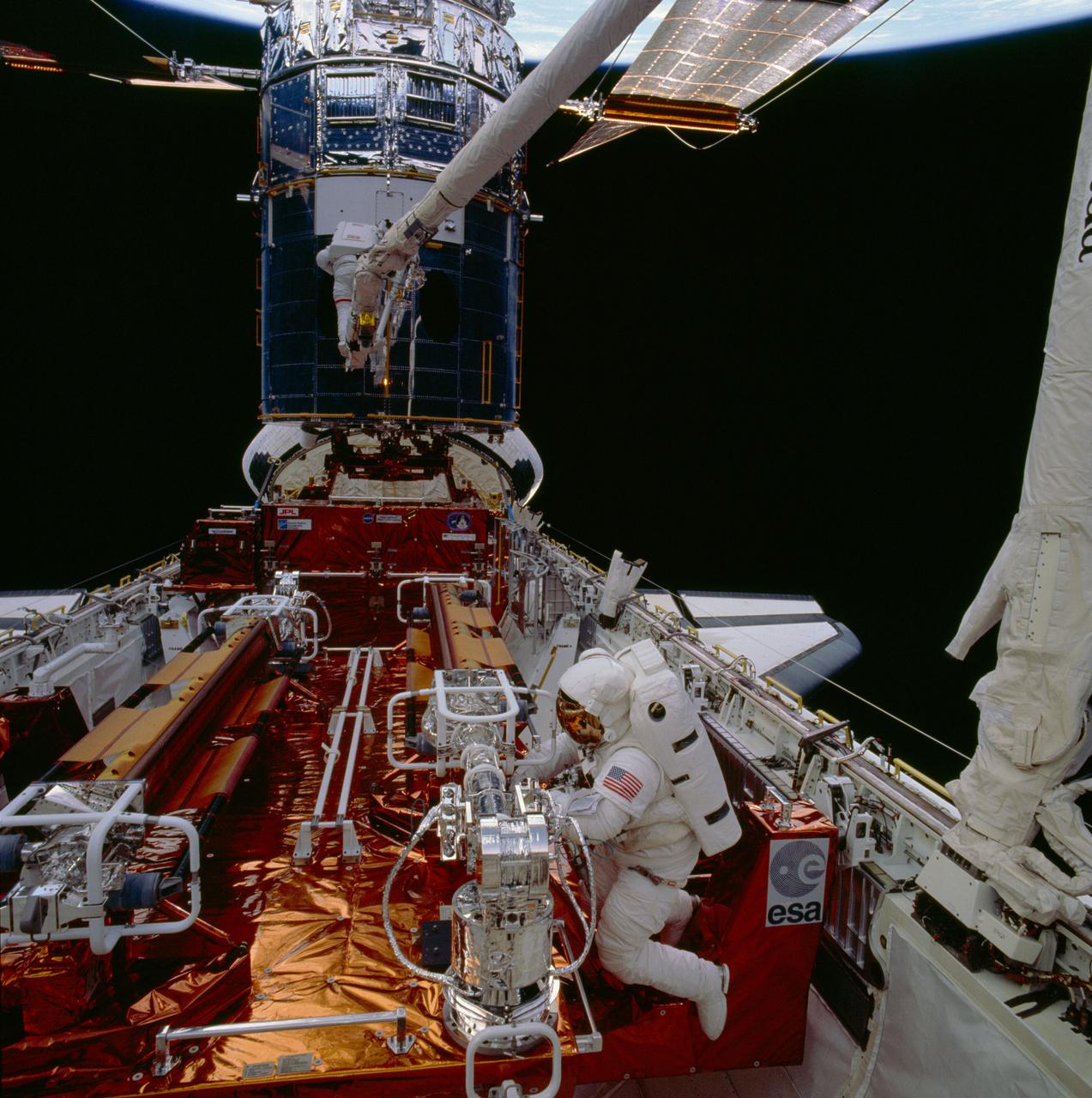
STS061-58-033 (7 Dec 1993) --- Anchored to the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman works with the replacement Wide Field/Planetary Camera (WF/PC II) for the Hubble Space Telescope (HST) during the third of five space walks. Astronaut F. Story Musgrave, who joined Hoffman for three of the five space walks, helps with alignment at center frame.

STS061-95-031 (6 Dec 1993) --- The damaged solar array panel removed from the Hubble Space Telescope (HST) is backdropped over northern Sudan. Astronaut Kathryn C. Thornton, just out of frame at top right, watched the panel after releasing it moments earlier.
STS061-37-011 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman with Wide Field/Planetary Camera (WF/PC 1) during changeout operations. WF/PC-2 has already been installed in cavity (out of frame). Astronauts Hoffman and Story Musgrave are performing Extravehicular Activities (EVA) to repair the Hubble Space Telescope (HST).

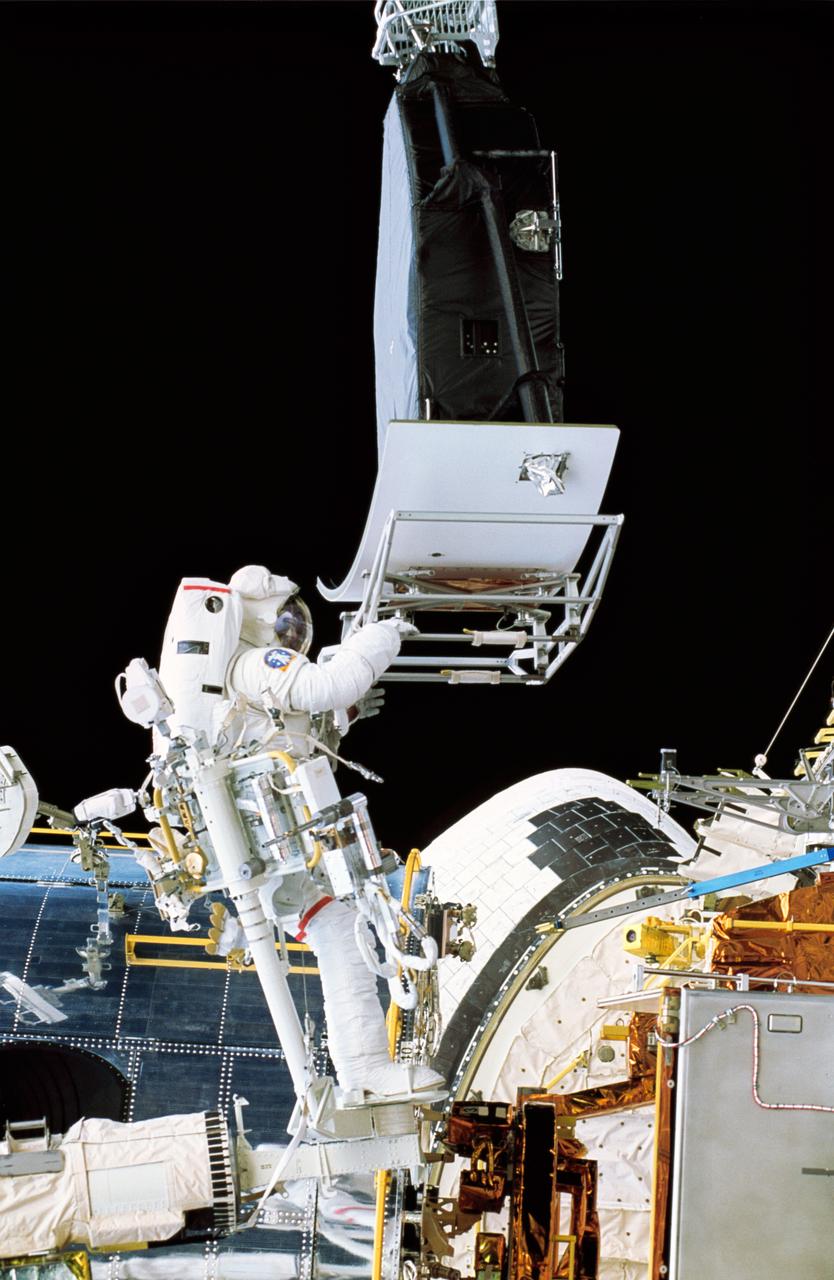
STS061-77-094 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored to the end of the Remote Manipulator System (RMS) arm, prepares to stow the Wide Field\Planetary Camera (WF\PC I) for the Hubble Space Telescope (HST), during their extravehicular activity (EVA). Astronaut F. Story Musgrave, stationed at the stowage area at bottom of frame, assists. WF/PC II is in place on the HST.
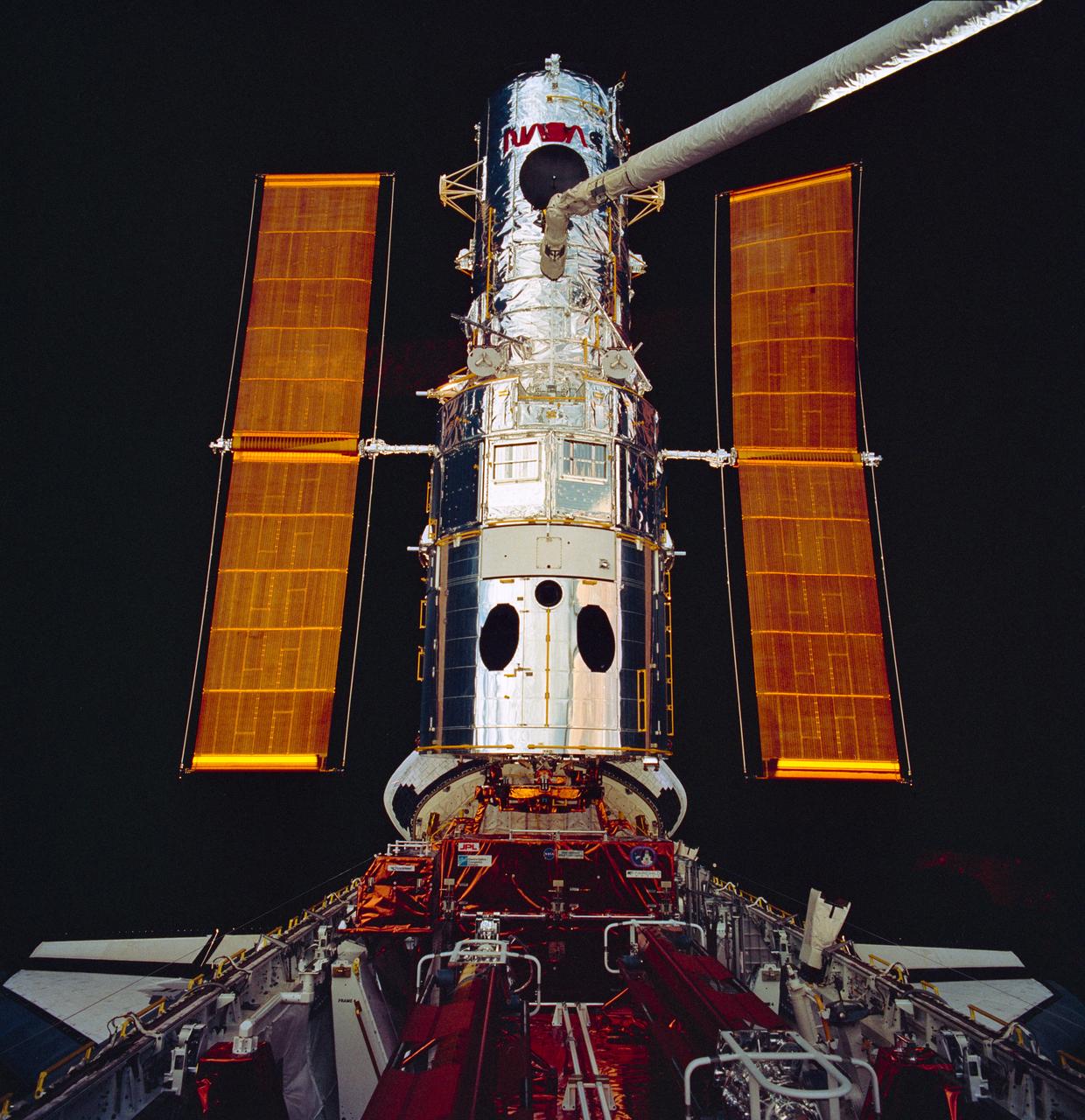
STS061-79-072 (4 Dec 1993) --- The Hubble Space Telescope (HST) is backdropped against the blackness of space in this 70mm frame recorded during a video survey of the spacecraft following the telescope's recent berthing in the Space Shuttle Endeavour's cargo bay. European Space Agency (ESA) scientist Claude Nicollier controlled the Remote Manipulator System (RMS) arm slowly so that mounted TV cameras could show flight controllers the various areas on the telescope.
STS061-74-046 (7 Dec 1993) --- Anchored on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronaut Jeffrey A. Hoffman (foreground) prepares to install the new Wide Field\Planetary Camera (WFPC II) into the empty cavity (top left) on the Hubble Space Telescope (HST). WFPC I is seen temporarily stowed at bottom right. Astronaut F. Story Musgrave works with a Portable Foot Restraint (PFR) at frame center, as his image is reflected in the shiny surface of the telescope. Hoffman and Musgrave shared chores on three of the five extravehicular activity?s (EVA) during the mission.

STS061-79-087 (4 Dec. 1993) --- The Hubble Space Telescope (HST), backdropped over Madagascar, is berthed in the space shuttle Endeavour's cargo bay following its capture by the STS-61 astronauts. The crew used TV cameras to survey the spacecraft before sending out four astronauts on five separate sessions of extravehicular activity (EVA) to perform a variety of servicing tasks. Photo credit: NASA

STS061-48-027 (9 Dec 1993) --- Astronaut F. Story Musgrave moves about in the Space Shuttle Endeavour's cargo bay during the deployment of the solar array panels on the Hubble Space Telescope (HST) during the final of five STS-61 space walks. The left hand of astronaut Jeffrey A. Hoffman appears at lower left corner.
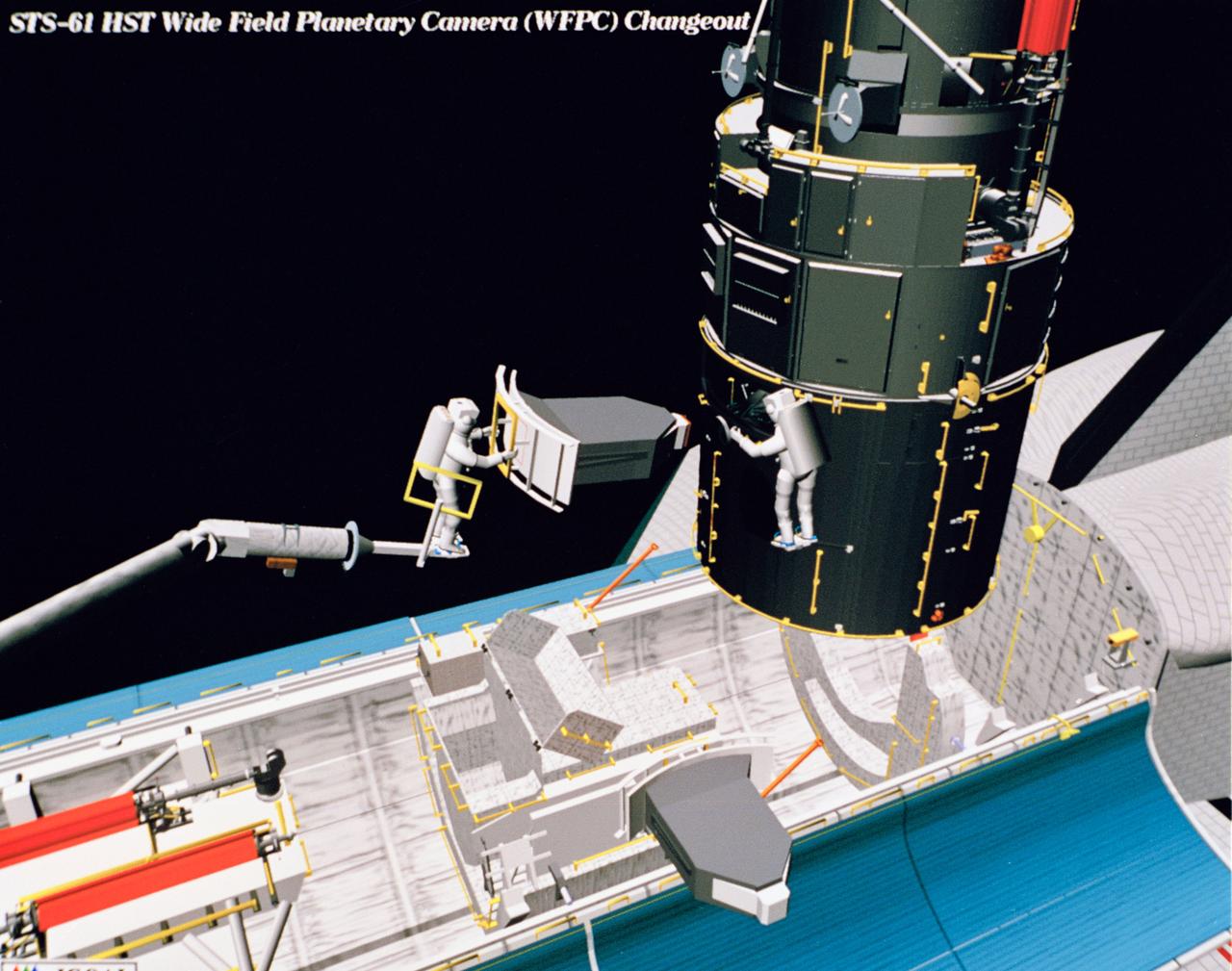
Computer generated scenes depicting the Hubble Space Telescope capture and a sequence of planned events on the planned extravehicular activity (EVA). Scenes include the Remote Manipulator System (RMS) arm assisting two astronauts changing out the Wide Field/Planetary Camera (WF/PC) (48699); RMS arm assisting in the temporary mating of the orbiting telescope to the flight support system in Endeavour's cargo bay (48700); Endeavour's RMS arm assisting in the "capture" of the orbiting telescope (48701); Two astronauts changing out the telescope's coprocessor (48702); RMS arm assistign two astronauts replacing one of the telescope's electronic control units (48703); RMS assisting two astronauts replacing the fuse plugs on the telescope's Power Distribution Unit (PDU) (48704); The telescope's High Resolution Spectrograph (HRS) kit is depicted in this scene (48705); Two astronauts during the removal of the high speed photometer and the installation of the COSTAR instrument (48706); Two astronauts, standing on the RMS, during installation of one of the Magnetic Sensing System (MSS) (48707); High angle view of the orbiting Space Shuttle Endeavour with its cargo bay doors open, revealing the bay's pre-capture configuration. Seen are, from the left, the Solar Array Carrier, the ORU Carrier and the flight support system (48708); Two astronauts performing the replacement of HST's Rate Sensor Units (RSU) (48709); The RMS arm assisting two astronauts with the replacement of the telescope's solar array panels (48710); Two astronauts replacing the telescope's Solar Array Drive Electronics (SADE) (48711).

STS061-53-026 (4 Dec 1993) --- One of the Space Shuttle Endeavour's aft flight deck windows frames this view of the Hubble Space Telescope (HST) as it approaches the Endeavour. Backdropped against western Australia, the Remote Manipulator System (RMS) arm awaits the arrival of the telescope. Once berthed in Endeavour's cargo bay, HST underwent five days of servicing provided by four space walking crew members. Shark Bay (upper left) and Perth (lower left) are visible in the frame.

STS061-77-078 (7 Dec 1993) --- Astronaut Jeffrey A. Hoffman, anchored on the end of the Remote Manipulator System (RMS) arm, is pictured with the Wide Field/Planetary Camera (WF/PC I) during the third of five extravehicular activity?s (EVA). Astronauts Hoffman and F. Story Musgrave, seen near the stowage area for the WF/PC, had earlier installed the new camera (note white rectangle) on lower portion of telescope.
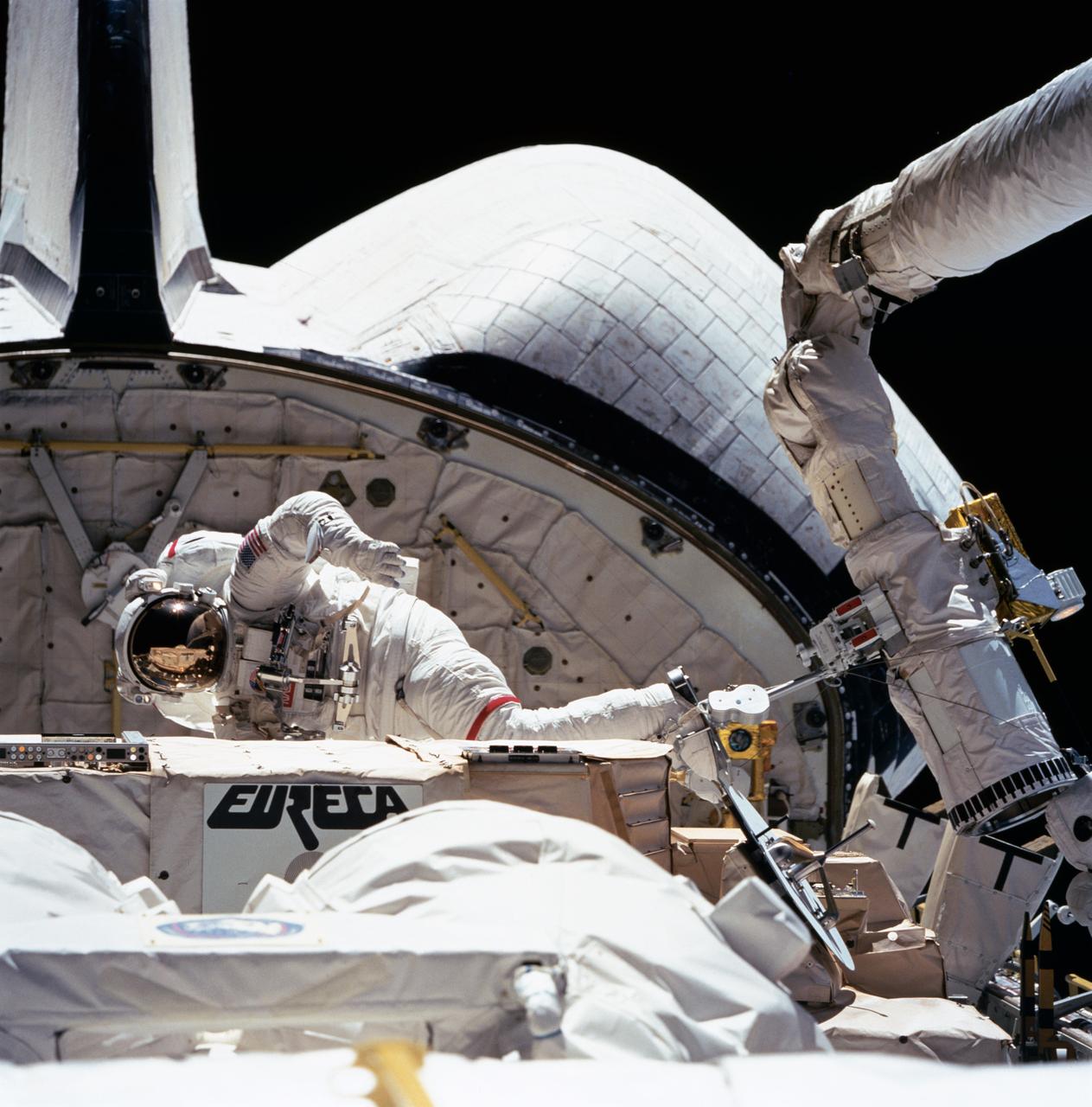
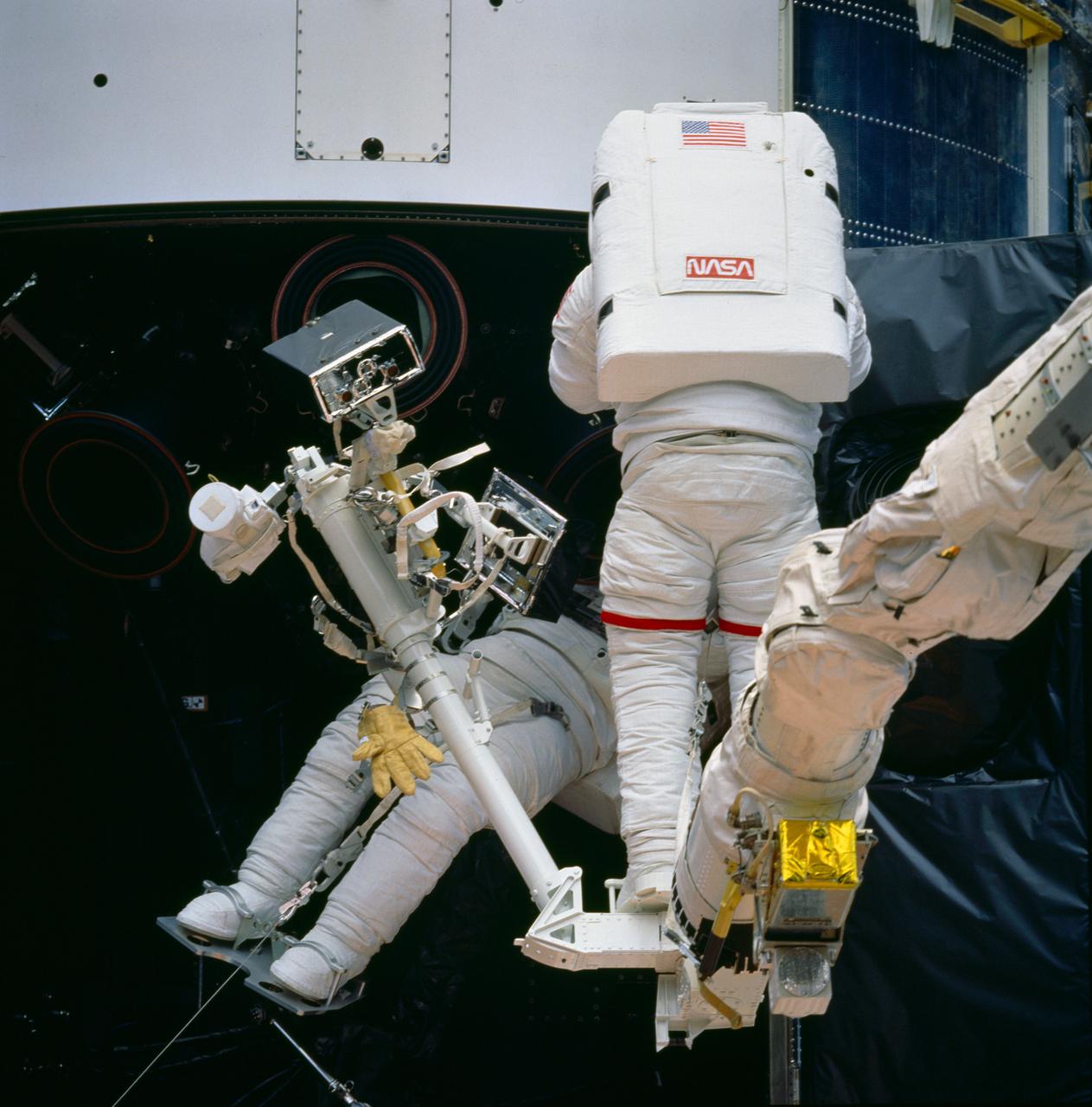
The darkness of space forms the backdrop for this extravehicular activity (EVA) scene captured by one of the STS-57 crewmembers in Endeavour's, Orbiter Vehicle (OV) 105's, crew cabin. Pictured near the recently "captured" European Retrievable Carrier (EURECA) at frame center is Mission Specialist (MS) and Payload Commander (PLC) G. David Low. Suited in an extravehicular mobility unit (EMU), Low, anchored to the remote manipulator system (RMS) via a portable foot restraint (PFR) (manipulator foot restraint (MFR)), is conducting Detailed Test Objective (DTO) 1210 procedures. Specifically, this activity will assist in refining several procedures being developed to service the Hubble Space Telescope (HST) on mission STS-61 in December 1993. The PFR is attached to the RMS end effector via a PFR attachment device (PAD). Partially visible in the foreground is the Superfluid Helium Onorbit Transfer (SHOOT) payload.

STS061-77-102 (7 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave are partially silhouetted against the Indian Ocean as they work to install the Magnetic Sensing System (MSS) on the Hubble Space Telescope (HST). Musgrave is anchored to the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The HST is positioned along the southern end of Madagascar, 325 nautical miles away. Visible on the western coast are the sediment laden Onilahy and Fiherenana Rivers which empty into Saint Augustin Bay. North of Fiherenana River is the Mangoky River. The circular feature on the southern end of Madagascar and to the right of HST is the L'ivakoany Mountains. The eastern coast is relatively straight compared to the western coast.

STS061-98-0AR (8 Dec 1993) --- Earth is partially illuminated but the Hubble Space Telescope (HST) and the Space Shuttle Endeavour are still mostly in darkness, in this 70mm frame photographed during the fourth of five space walks. Astronaut Kathryn C. Thornton, barely visible above left center in the frame, works to install the Corrective Optics Space Telescope Axial Replacement (COSTAR).

STS061-48-001 (9 Dec 1993) --- Orbiting Earth at an altitude of 356 nautical miles perched atop a foot restraint on the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, astronauts F. Story Musgrave (top) and Jeffrey A. Hoffman wrap up the final of five Extravehicular Activities (EVA). The west coast of Australia forms the backdrop for the 35mm frame.

STS061-98-050 (9 Dec 1993) --- Astronaut F. Story Musgrave, anchored on the end of the Remote Manipulator System (RMS) arm, prepares to be elevated to the top of the towering Hubble Space Telescope (HST) to install protective covers on magnetometers. Astronaut Jeffrey A. Hoffman (bottom of frame) assisted Musgrave with final servicing tasks on the telescope, wrapping up five days of extravehicular activities (EVA).

STS061-99-009 (9 Dec 1993) --- Sunlight reflects off the Space Shuttle Endeavour's aft windows and the shiny Hubble Space Telescope (HST) prior to its post-servicing deployment near the end of the eleven-day mission. A handheld Hasselblad camera was used inside Endeavour's cabin to record the image.

STS061-105-026 (7 Dec. 1993) --- Astronaut Jeffrey A. Hoffman signals directions to European Space Agency (ESA) astronaut Claude Nicollier, as the latter controls the Remote Manipulator System (RMS) arm during the third of five Extravehicular Activities (EVA) on the Hubble Space Telescope (HST) servicing mission. Astronauts Hoffman and F. Story Musgrave earlier changed out the Wide Field\Planetary Camera (WF\PC).

STS061-95-075 (6 Dec 1993) --- Astronauts Kathryn C. Thornton and Thomas D. Akers work to remove one of the solar arrays on the Hubble Space Telescope (HST) on the second of five extravehicular activity?s (EVA). The two space walkers later replaced both solar array panels. Part of Australia is in the background.
STS061-86-048 (5 Dec 1993) --- Astronauts F. Story Musgrave (foreground) and Jeffrey A. Hoffman are pictured near the end of the first of five extravehicular activity?s (EVA). Musgrave works at the Solar Array Carrier (SAC) in the Space Shuttle Endeavour's cargo bay. Hoffman, anchored to a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, waits to be maneuvered to the forward payload bay. The original solar array panels are partially visible at top, while their replacements remain stowed in foreground. The crew's second pair of space walkers -- astronauts Kathryn C. Thornton and Thomas D. Akers -- later changed the solar arrays on the mission's second EVA.

STS061-102-010 (9 Dec 1993) --- Astronauts Jeffrey A. Hoffman (left) and F. Story Musgrave team to replace one of two Solar Array Drive Electronics (SADE) units on the Hubble Space Telescope (HST). Musgrave is standing on a foot restraint mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm. The black object, in upper left corner, is part of the window frame, through which this 70mm frame was exposed, inside Endeavour's cabin.

STS061-104-007 (5 Dec 1993) --- Astronaut F. Story Musgrave, holding to one of many strategically placed handrails on the Hubble Space Telescope (HST), is photographed during the first of five extravehicular activity?s (EVA) on the HST-servicing mission, aboard the Space Shuttle Endeavour.
STS061-87-046 (5 Dec 1993) --- Astronauts Jeffrey A. Hoffman (right) and F. Story Musgrave work near the base of the Hubble Space Telescope (HST) on the first of five spacewalks. Their particular mission here is to replace failed Rate Sensor Units (RSU) inside the telescope's housing. Hoffman is anchored to a foot restraint, mounted on the end of the Space Shuttle Endeavour's Remote Manipulator System (RMS) arm, while Musgrave is standing on a foot restraint attached to a support structure in the cargo bay.
STS061-94-059 (8 Dec. 1993) --- Astronaut Thomas D. Akers maneuvers inside the bay which will house the Corrective Optics Space Telescope Axial Replacement (COSTAR) while assisting astronaut Kathryn C. Thornton with the installation of the 640-pound instrument. Thornton, anchored on the end of the Remote Manipulator System (RMS) arm, is partially visible as she prepares to install the COSTAR.

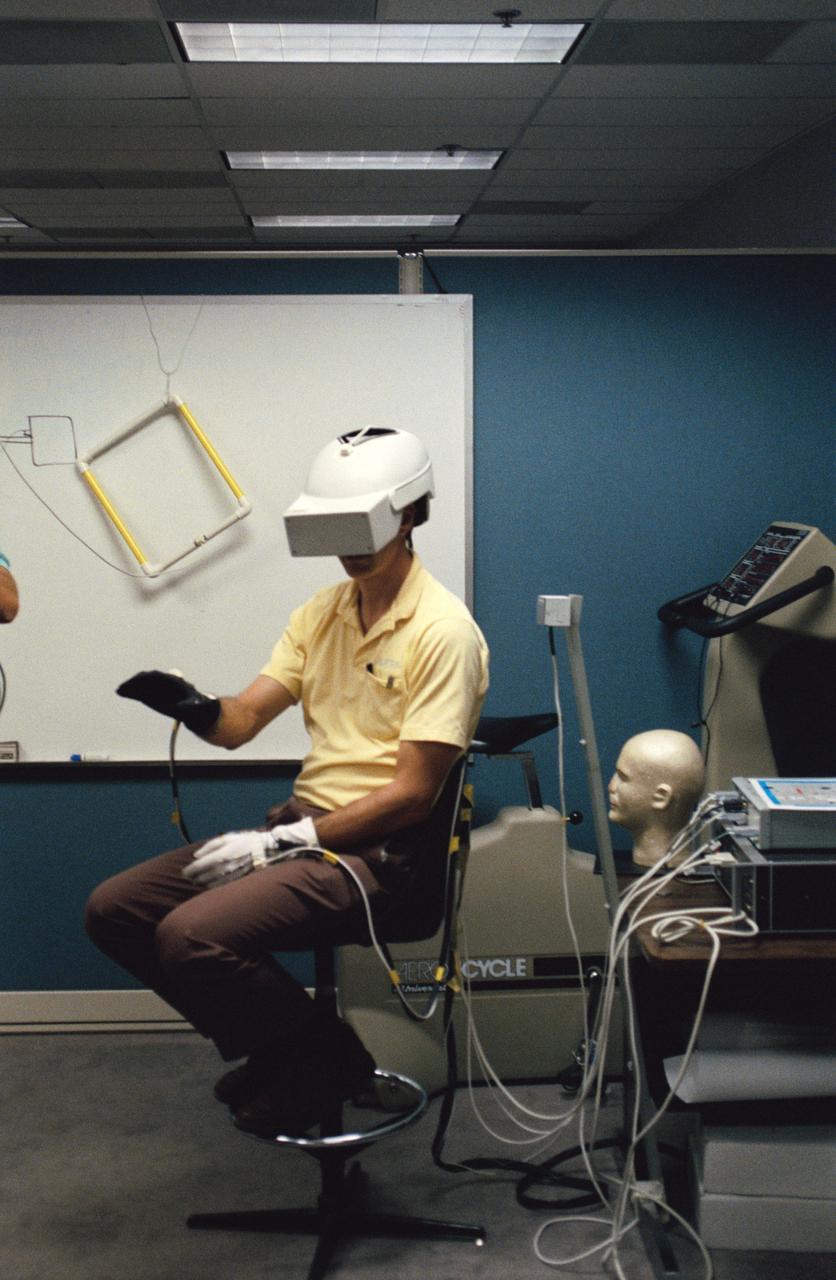
Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).

Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).

Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).

Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).
Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).

Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).

Astronaut Jeffrey A. Hoffman, one of four crewmembers for STS-61 that will conduct scheduled spacewalks during the flight, wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm. Crewmembers are utilizing a new virtual reality training aid which assists in refining positioning patterns for Space Shuttle Endeavour's Remote Manipulator System (RMS) (36890); Astronaut Claude Nicollier looks at a computer display of the Shuttle's robot arm movements as Thomas D. Akers and Kathryn C. Thornton, mission specialists look on. Nicollier will be responsible for maneuvering the astronauts while they stand in a foot restraint on the end of the RMS arm (36891,36894); Hoffman wears a special helmet and gloves designed to assist in proper positioning near the telescope while on the end of the robot arm (35892); Nicollier looks at a computer display of the Shuttle's robot arm movements as Akers looks on (36893); While (l-r) Astronauts Kenneth Bowersox, Kathryn Thornton, Richard O. Covey and Thomas D. Akers watch, Nicollier moves the Robot arm to desired locations in the Shuttle's payload bay using the Virtual Reality program (36895); Bowersox takes his turn maneuvering the RMS while mission specialist Hoffman, wearing the Virtual Reality helmet, follows his own progress on the end of the robot arm. Crewmembers participating during the training session are (l-r) Astronauts Akers, Hoffman, Bowersox, Nicollier, Covey, and Thornton. In the background, David Homan, an engineer in the JSC Engineering Directorate's Automation and Robotics Division, looks on (36896).