
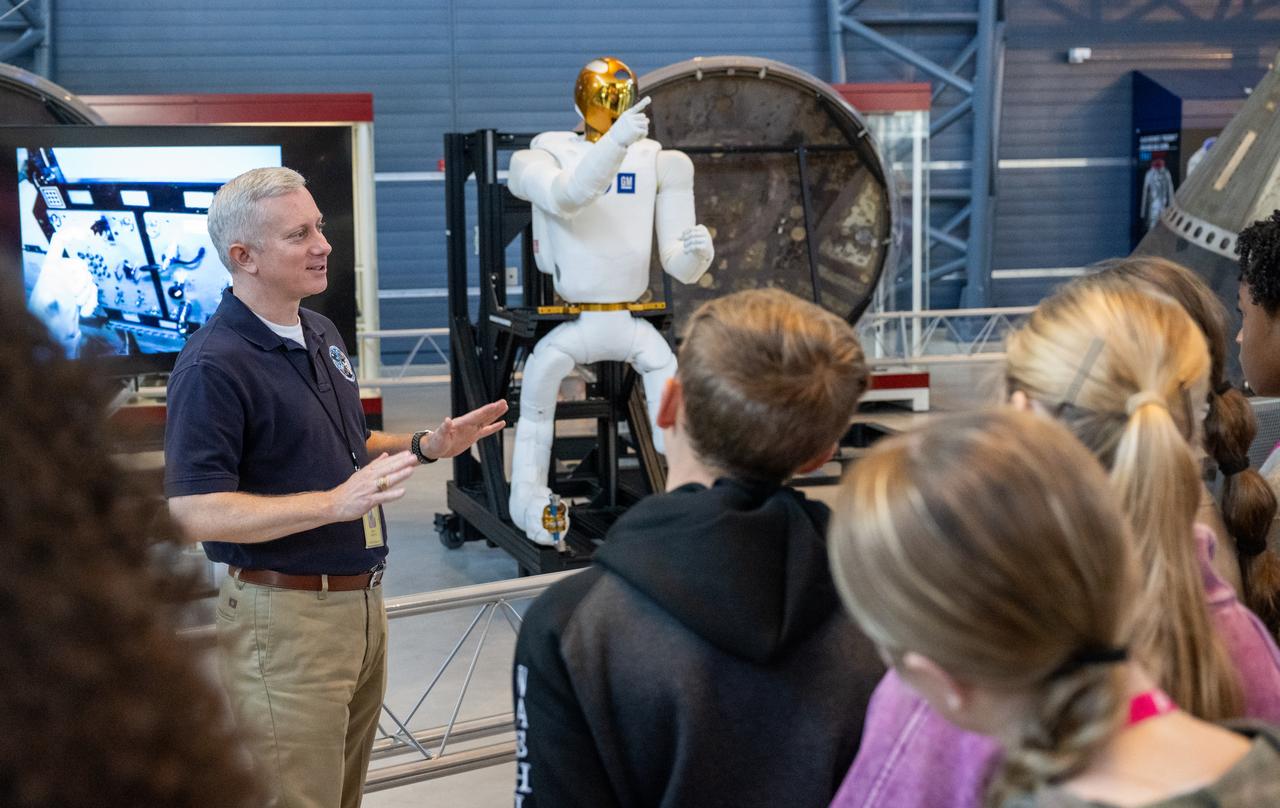
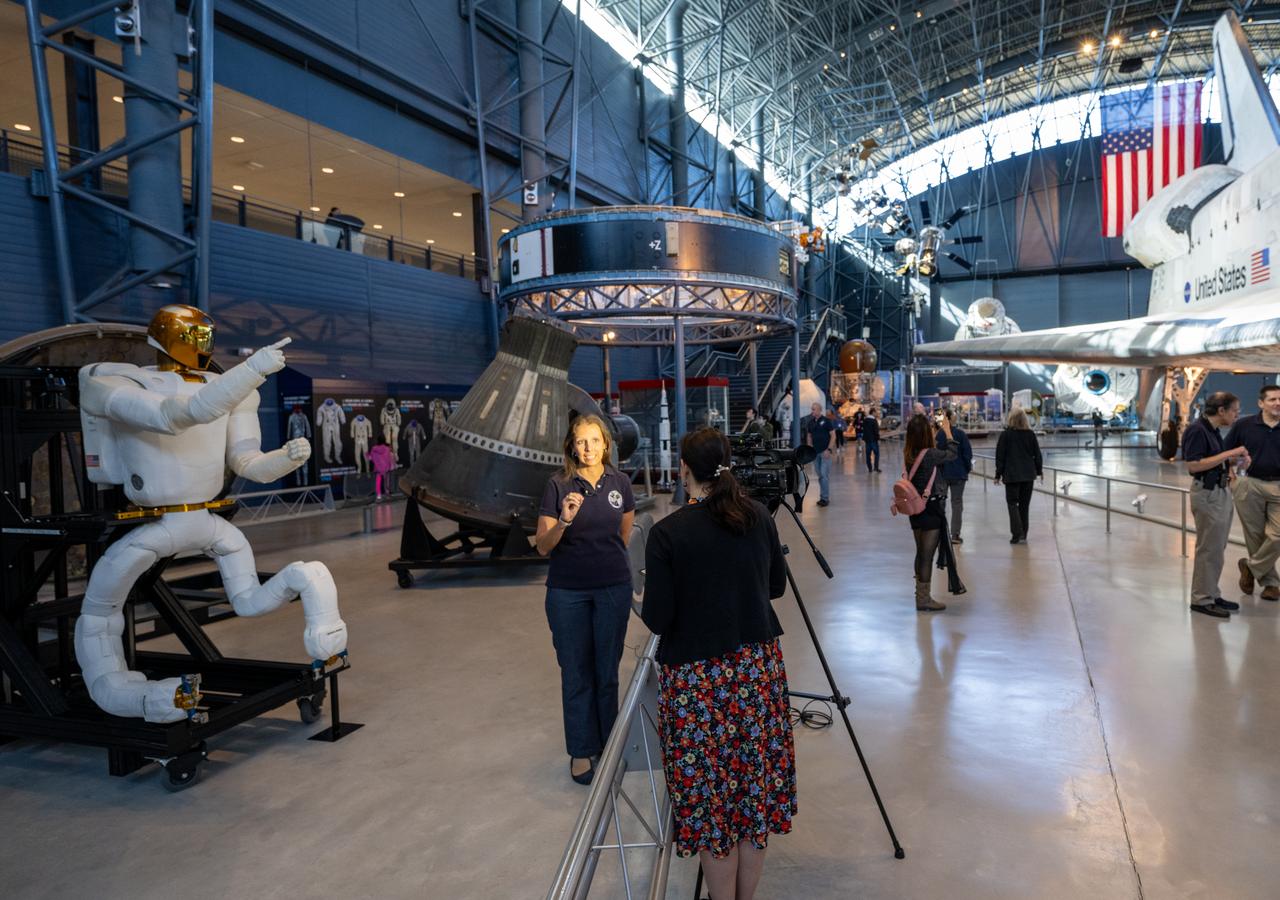
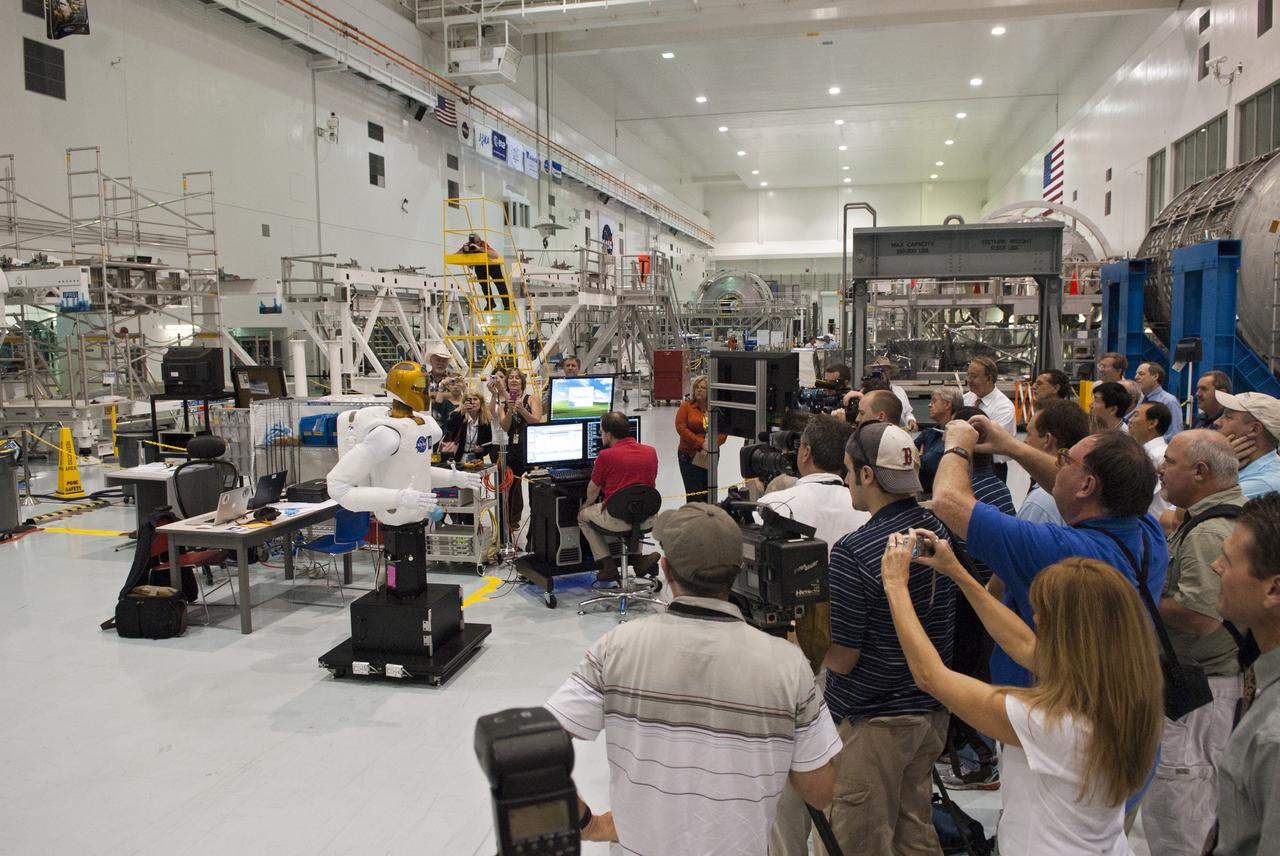
Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, answers questions about Robonaut 2 from museum guests at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, answers questions about Robonaut 2 from museum guests at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
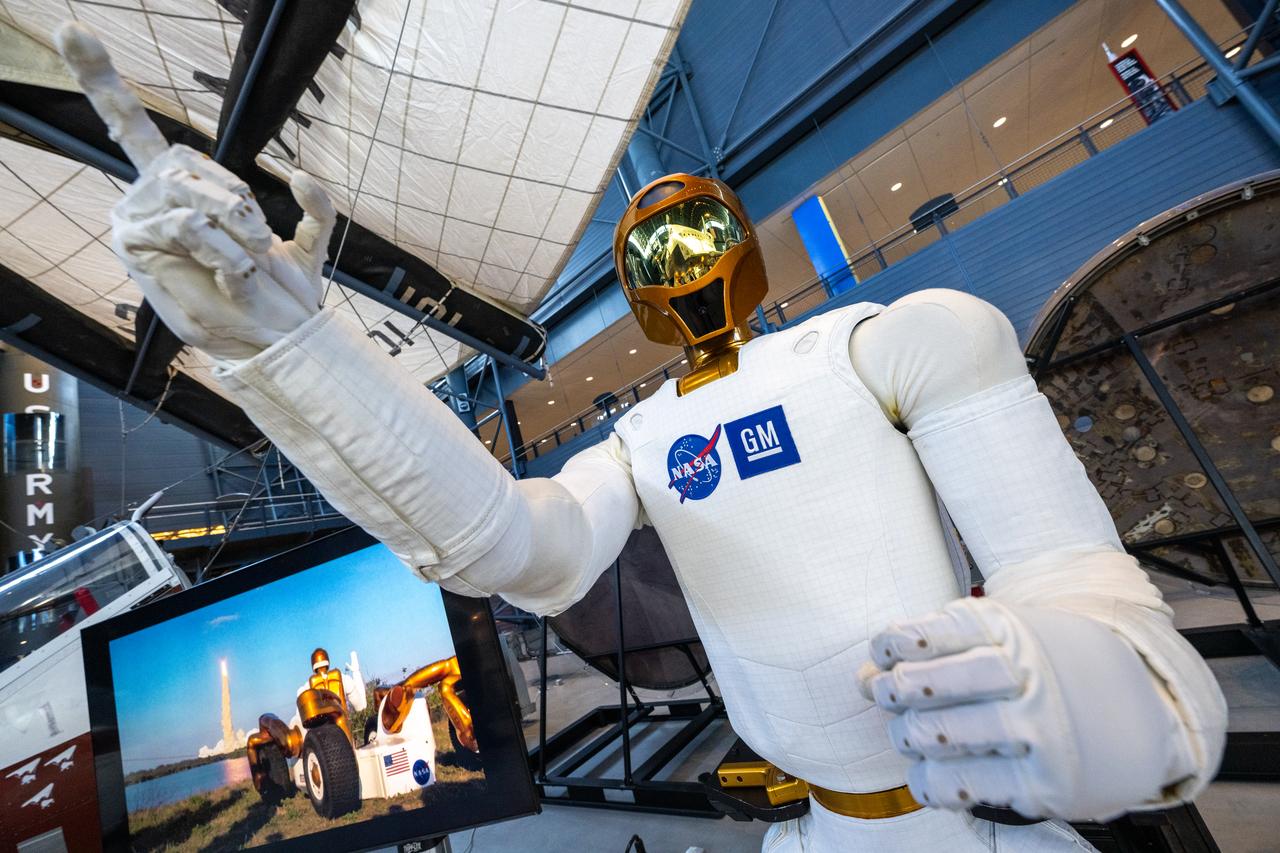
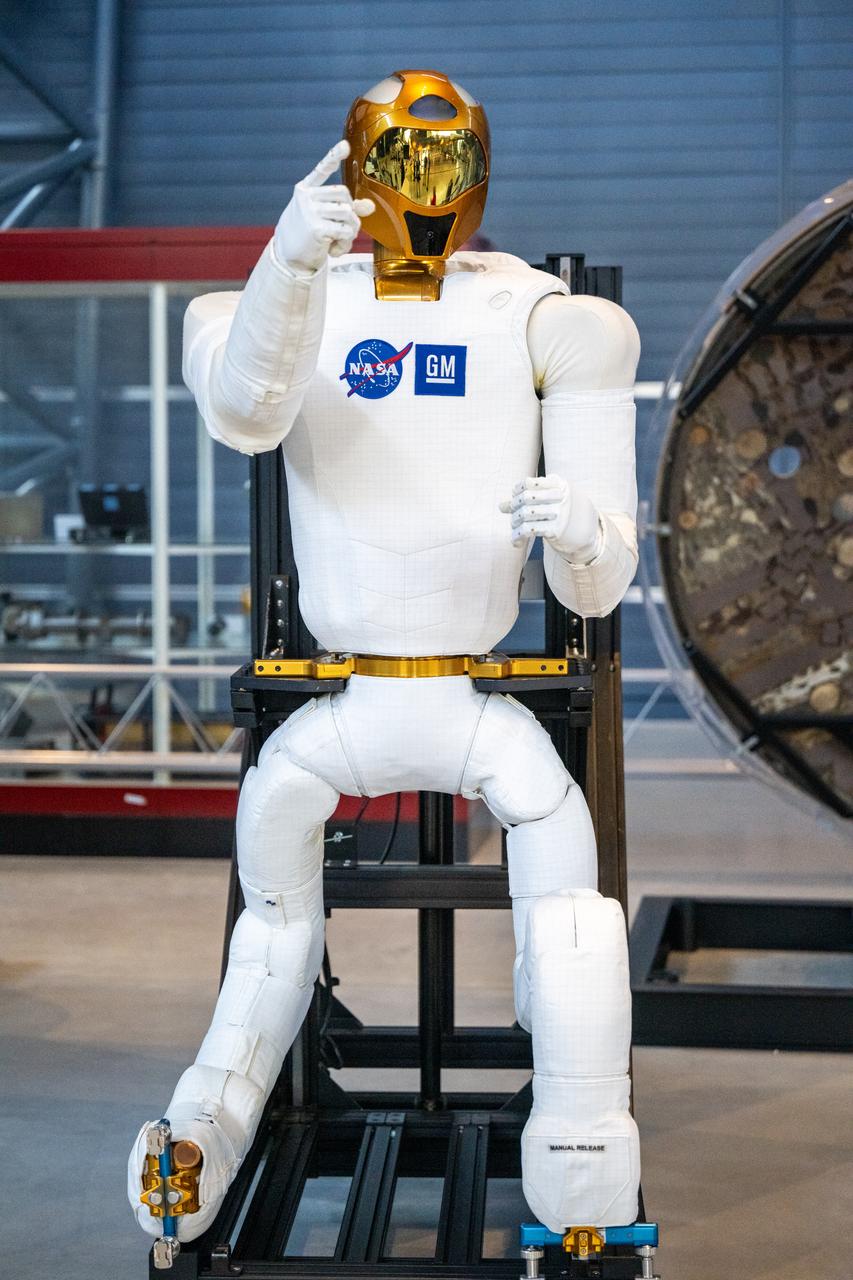
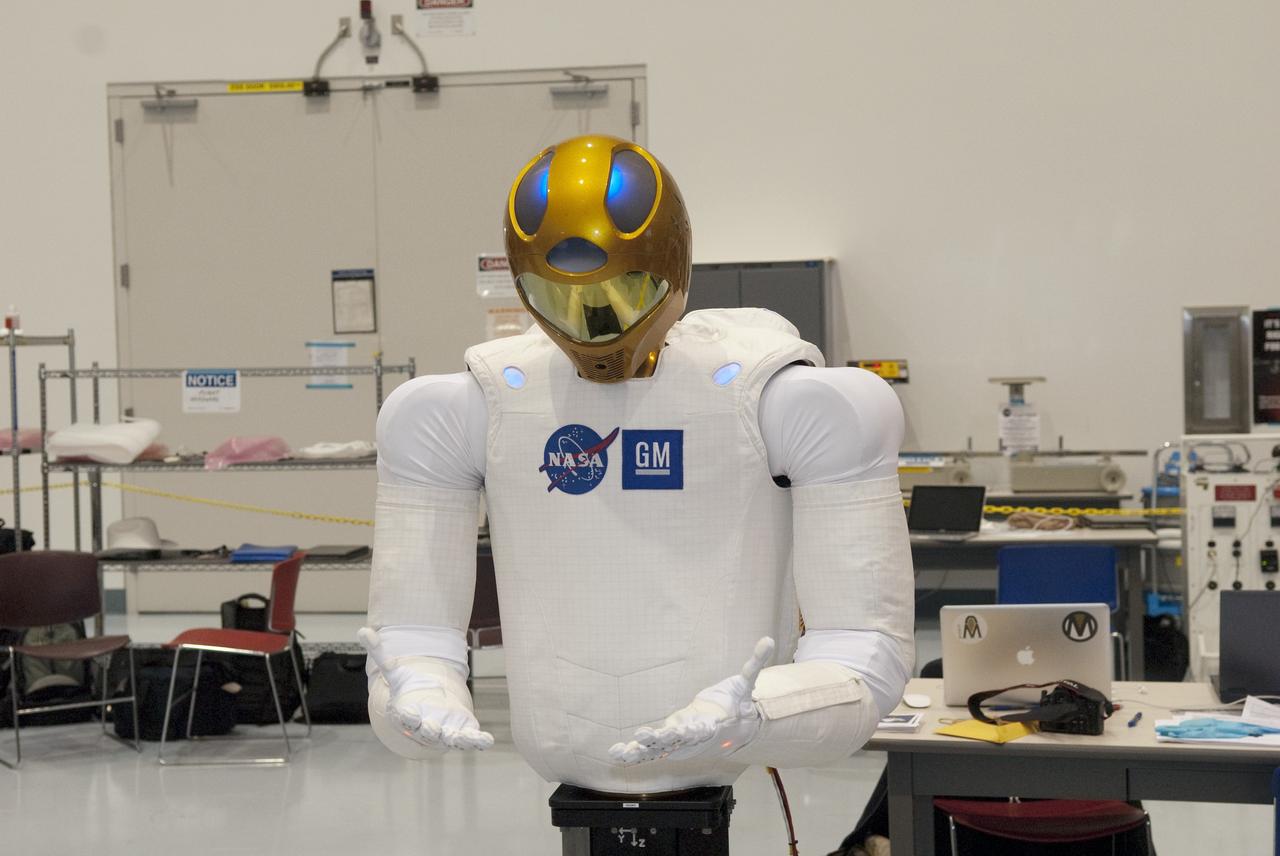
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Robonaut 2 is seen at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
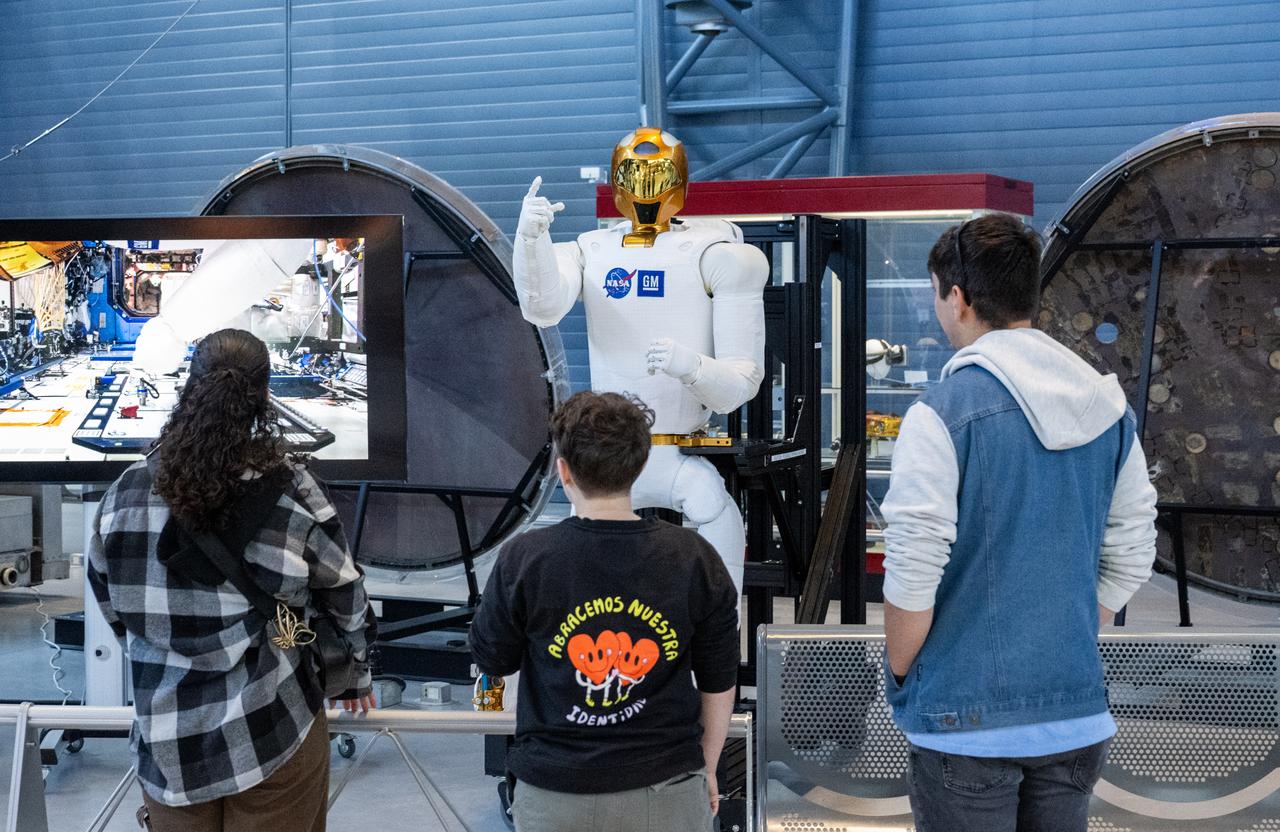
Museum guests view Robonaut 2 at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Jonathan Rogers, chief of the Robotic Systems Technology Branch at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)
Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

Julia Badger, autonomy and vehicle systems manager for Gateway at NASA’s Johnson Space Center and former Robonaut project manager, participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

NASA Tweetup participants along with NASA engineers and Robonaut 2 stand at the launch clock, Thursday, Feb. 24, 2011, prior to the launch of the space shuttle Discovery (STS-133) at Kennedy Space Center in Cape Canaveral, Fla. During the 11-day mission, Discovery will deliver the Italian-built Permanent Multipurpose Module (PMM) and Express Logistics Carrier 4 (ELC4) along with another Robonaut 2, which will become the first humanoid robot in space. Discovery, on its 39th and final flight, is NASA's most flown shuttle. Photo Credit: (NASA/Paul E. Alers)

Space history curator Jennifer Levasseur participates in a media opportunity at the Smithsonian National Air and Space Museum’s Steve F. Udvar-Hazy Center Thursday, Oct. 24, 2024, in Chantilly, Va. Robonaut 2, the first humanoid robot to fly to space, is displayed publicly for the first time near the space shuttle Discovery. Photo Credit: (NASA/Keegan Barber)

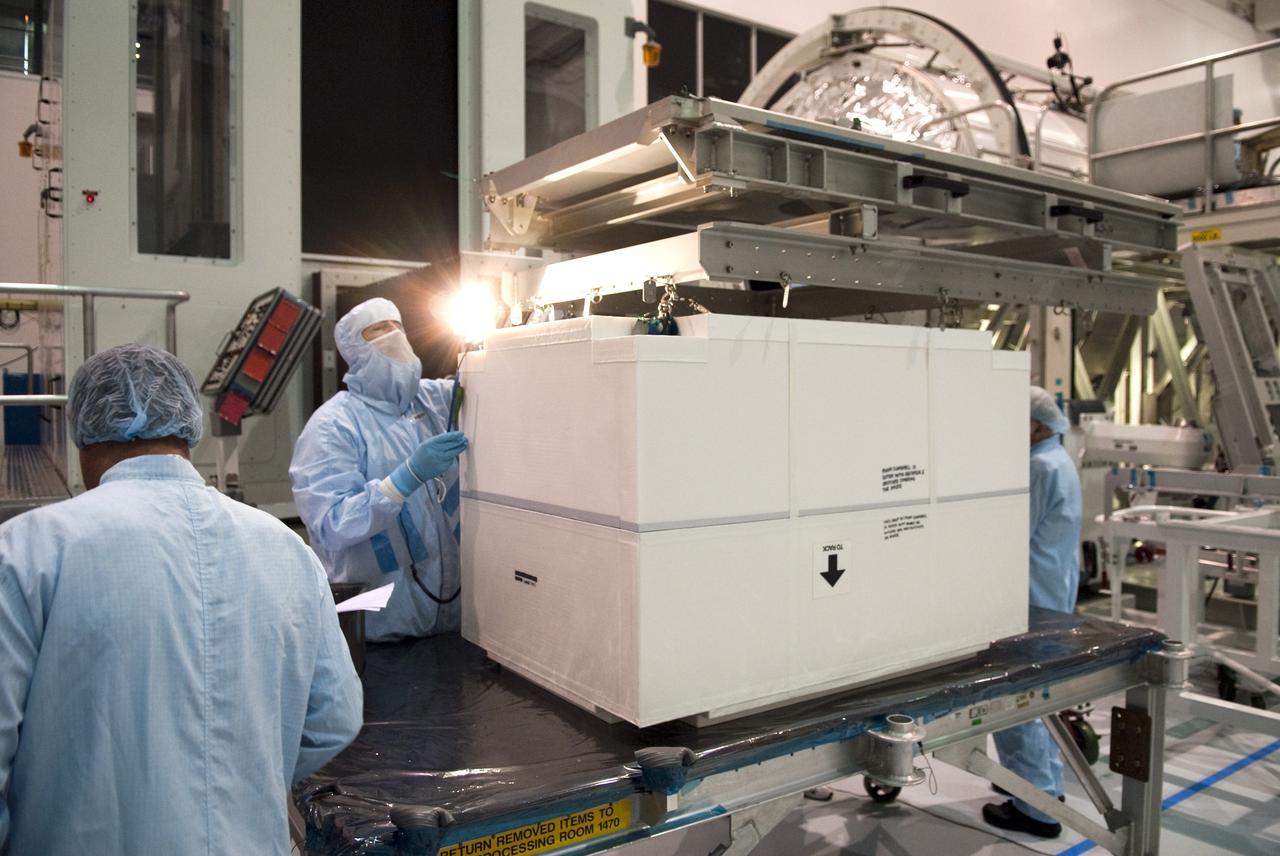
CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, workers lift the lid off of a crate containing Robonaut R2, a dexterous humanoid astronaut helper. Robonaut R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA_Kim Shiflett

JSC2005-E-11678 (December 2003) --- This is Robonaut B, the newer of two NASA robots used in recent hand-in-hand testing at the Johnson Space Center with human beings to evaluate their shared ability to perform certain types of extravehicular activity. In late 2003 Robonaut Unit B was retrofitted with a mobile platform. This new base, called the Robonaut Mobility Platform (RMP), adds an entirely new capability to the functionality of Unit B.
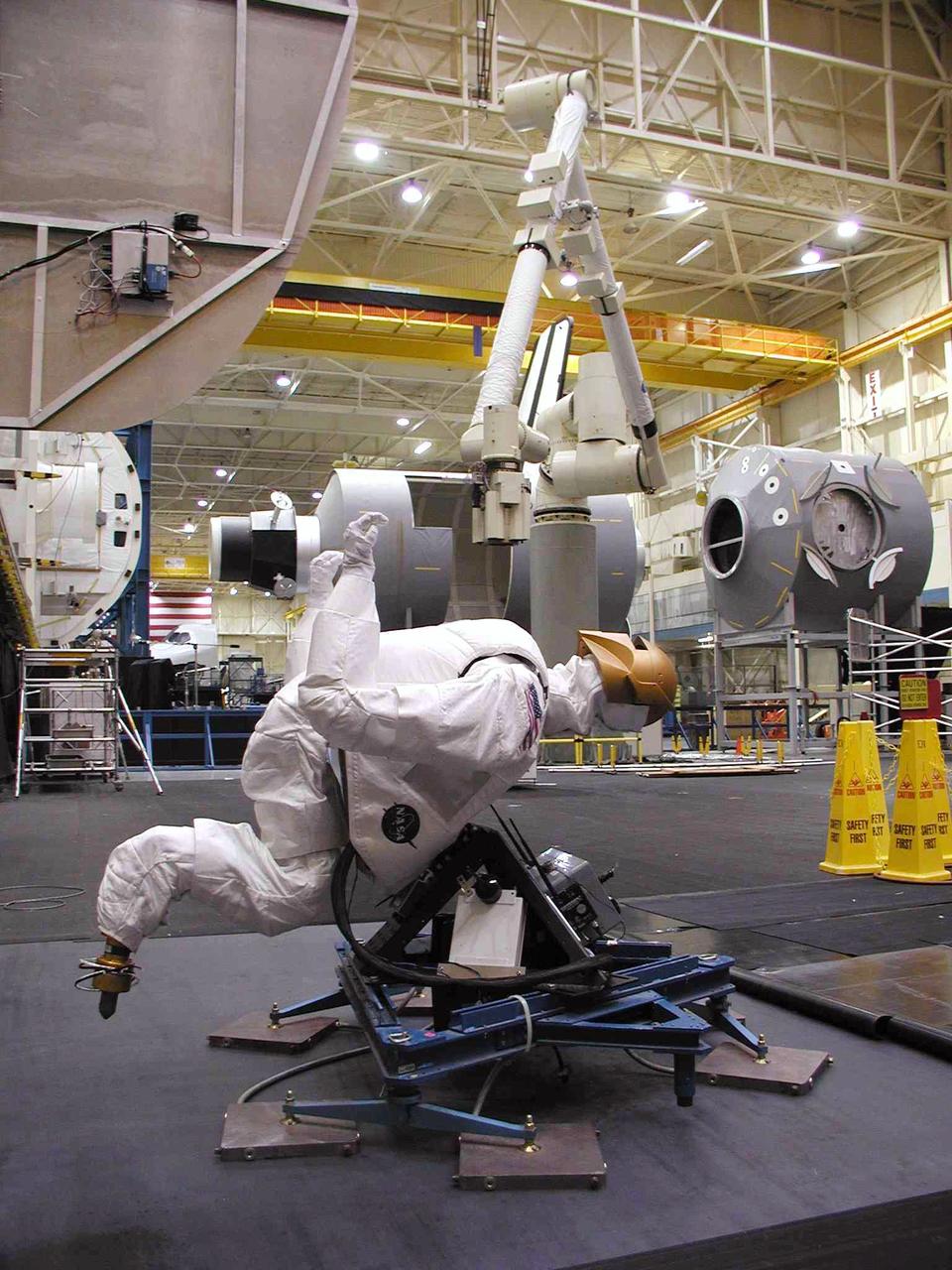
JSC2004-E-16342 (March 2004) --- Tests of Robonaut’s ability were conducted on the Precision Air-Bearing Floor in Johnson Space Center’s (JSC) Space Vehicle Mockup Facility. Robonaut was mounted to a pressurized air sled, which allowed teleoperators to emulate some of the conditions of weightlessness. The Robonaut Project is a collaborative effort with the Defense Advanced Research Projects Agency (DARPA), and has been under development at JSC for several years.

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Ron Diftler, NASA Robonaut project manager, describes the animation of the dexterous humanoid astronaut helper, Robonaut (R2) to the media. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Ron Diftler, NASA Robonaut project manager, describes the movements of the dexterous humanoid astronaut helper, Robonaut (R2). R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Ron Diftler, NASA Robonaut project manager, describes the animation of the dexterous humanoid astronaut helper, Robonaut (R2) to the media. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Ron Diftler, NASA Robonaut project manager, talks to the media about the dexterous humanoid astronaut helper, Robonaut (R2). R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Ron Diftler, NASA Robonaut project manager explains to the audience how the dexterous humanoid astronaut helper, Robonaut (R2) can be of service while in space. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

View of Astronaut Karen Nyberg, Expedition 36 flight engineer, performing Robonaut Teleops activities with Robonaut 2,the first humanoid robot in space,in the Destiny laboratory of the International Space Station. Sent also as Twitter message.

NASA astronaut Karen Nyberg,Expedition 36 flight engineer,is pictured with Robonaut 2,the first humanoid robot in space,in the Destiny laboratory of the International Space Station.

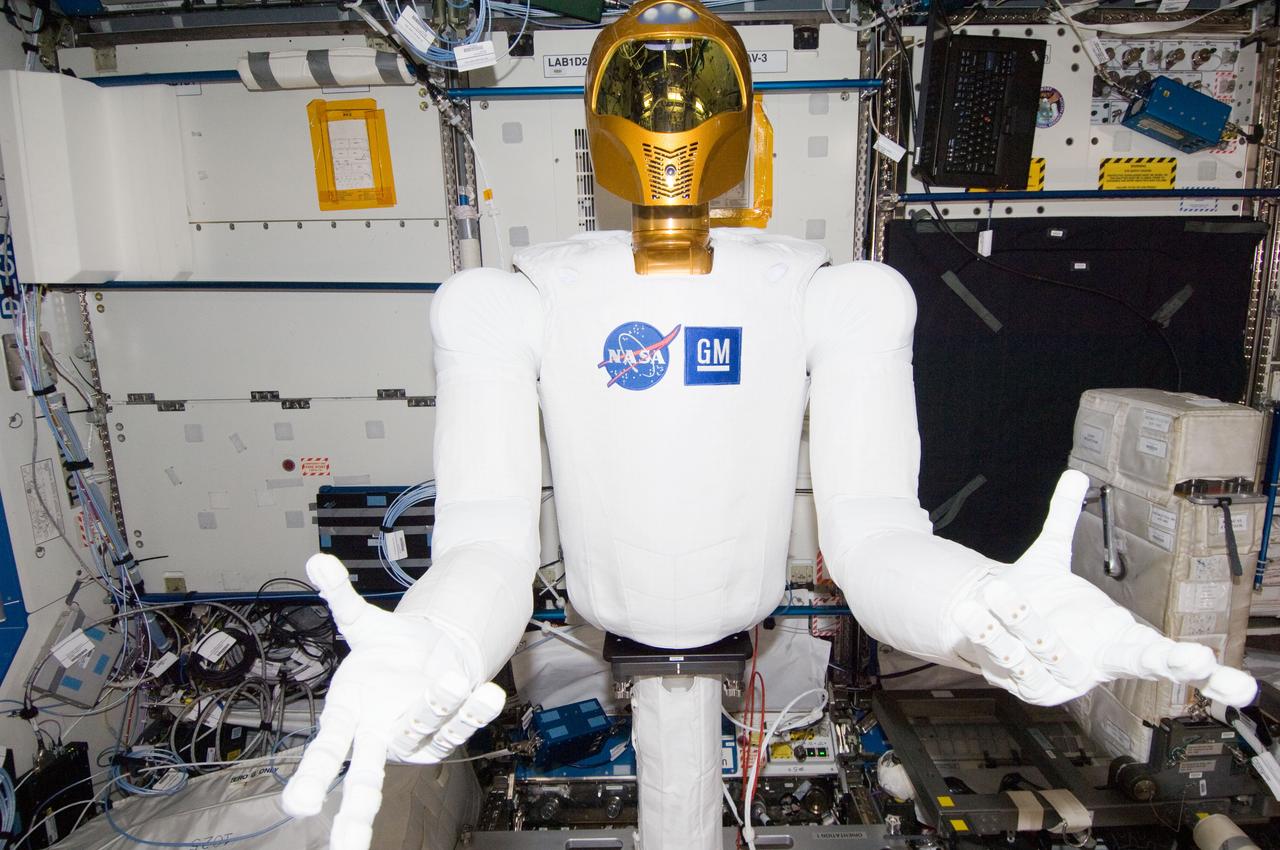
ISS026-E-034307 (15 March 2011) --- Robonaut 2, the dexterous humanoid astronaut helper, is pictured in the Destiny laboratory of the International Space Station.

ISS026-E-034306 (15 March 2011) --- Robonaut 2, the dexterous humanoid astronaut helper, is pictured in the Destiny laboratory of the International Space Station.

JSC2004-E-16343 (March 2004) --- Robonaut – which uses a head, torso, arms and dexterous hands to perform tasks using the same tools used by human spacewalkers – was fitted with a movable leg that ended in a “foot” that was a common interface for the standard Work Interface Facility (WIF) anchors on the International Space Station (ISS). The Robonaut Project is a collaborative effort with the Defense Advanced Research Projects Agency (DARPA), and has been under development at Johnson Space Center (JSC) for several years.
JSC2004-E-16339 (March 2004) --- Robonaut - which uses a head, torso, arms and dexterous hands to perform tasks using the same tools used by human spacewalkers – has both hands free once its leg is anchored in a standard Work Interface Facility (WIF) attached to the test panel. The Robonaut Project is a collaborative effort with the Defense Advanced Research Projects Agency (DARPA), and has been under development at Johnson Space Center (JSC) for several years.

JSC2004-E-16341 (March 2004) --- Robonaut uses a standard human spacewalk tether to connect itself to an International Space Station (ISS) exterior handrail on the test panel. The Robonaut Project is a collaborative effort with the Defense Advanced Research Projects Agency (DARPA), and has been under development at Johnson Space Center (JSC) for several years.
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida prepare to lift and load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin
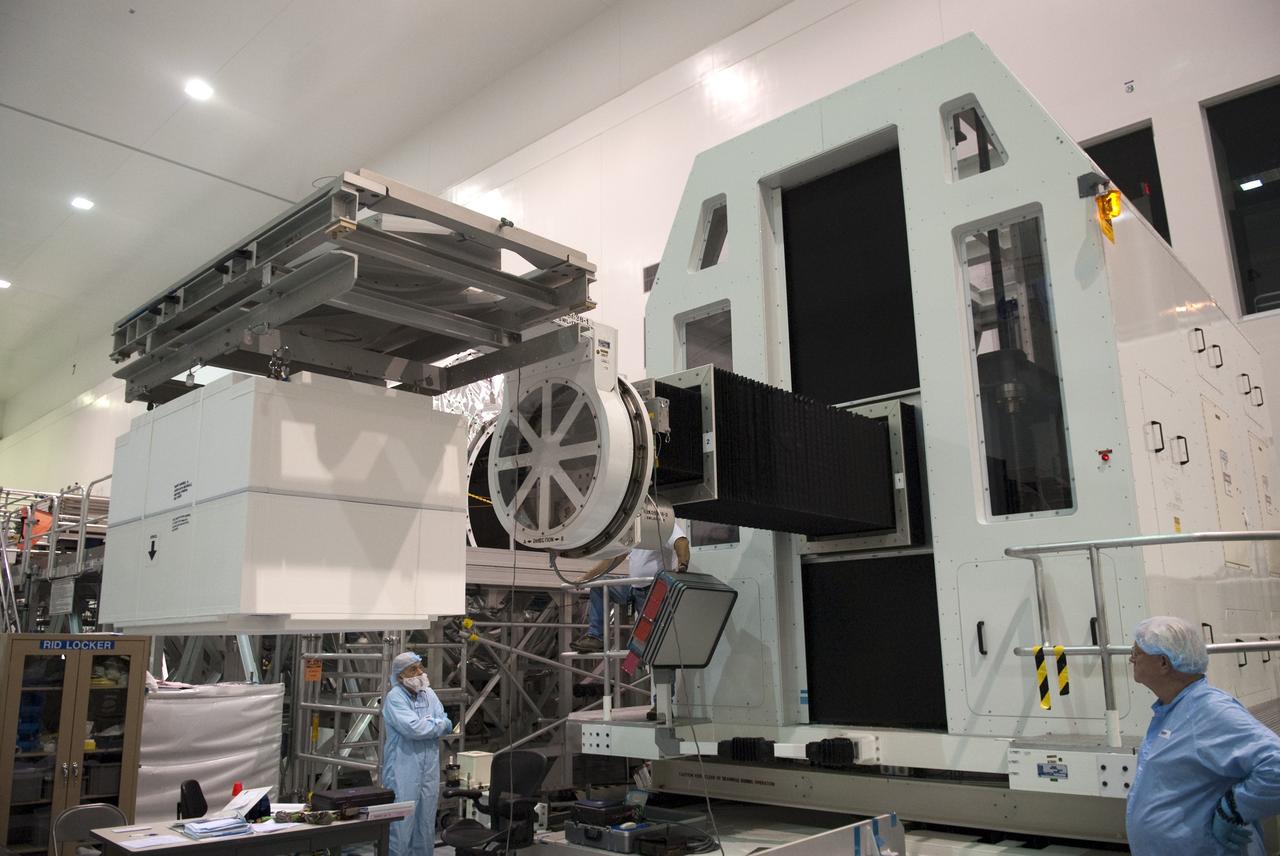
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida lift the dexterous humanoid astronaut helper, Robonaut 2, or R2, toward the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin
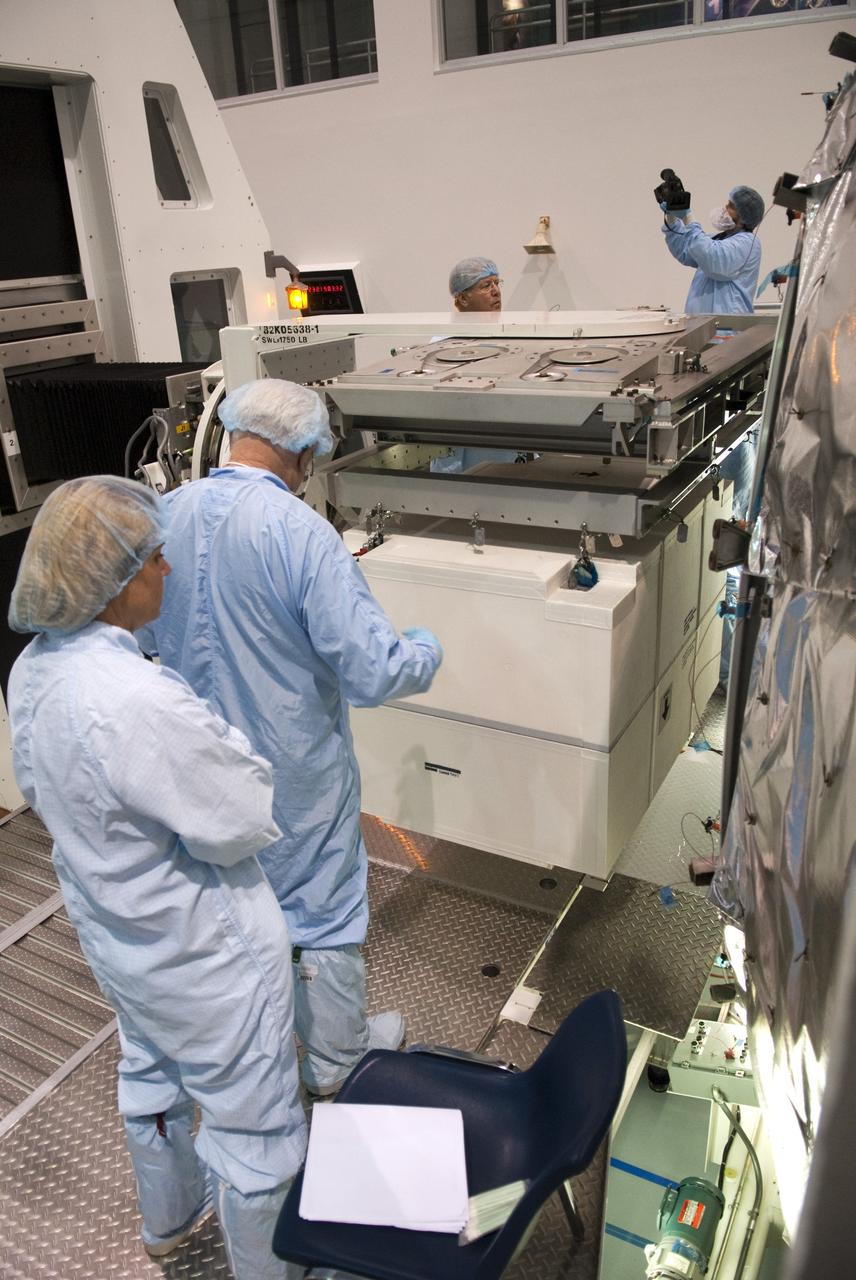
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida prepare to load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin

CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin

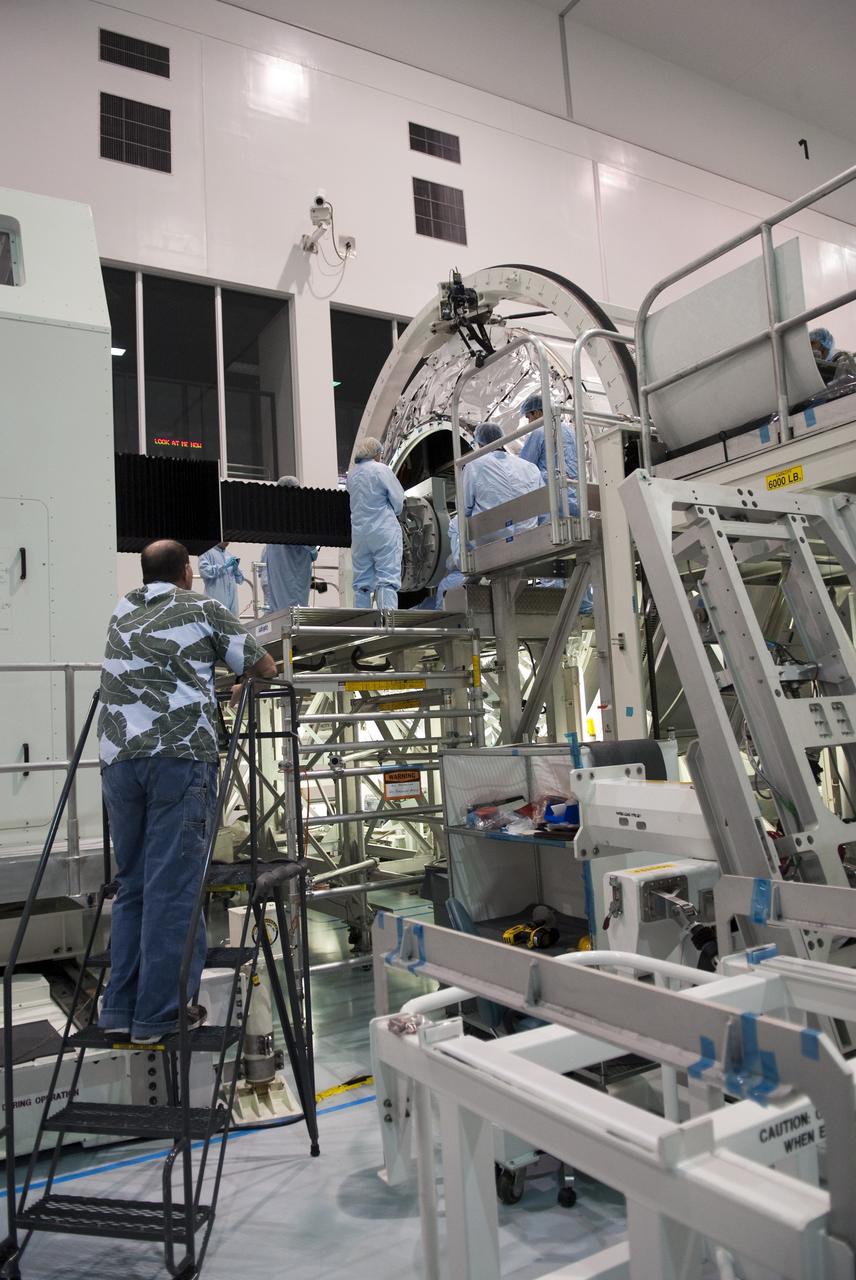
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida lift the dexterous humanoid astronaut helper, Robonaut 2, or R2, toward the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin

CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin
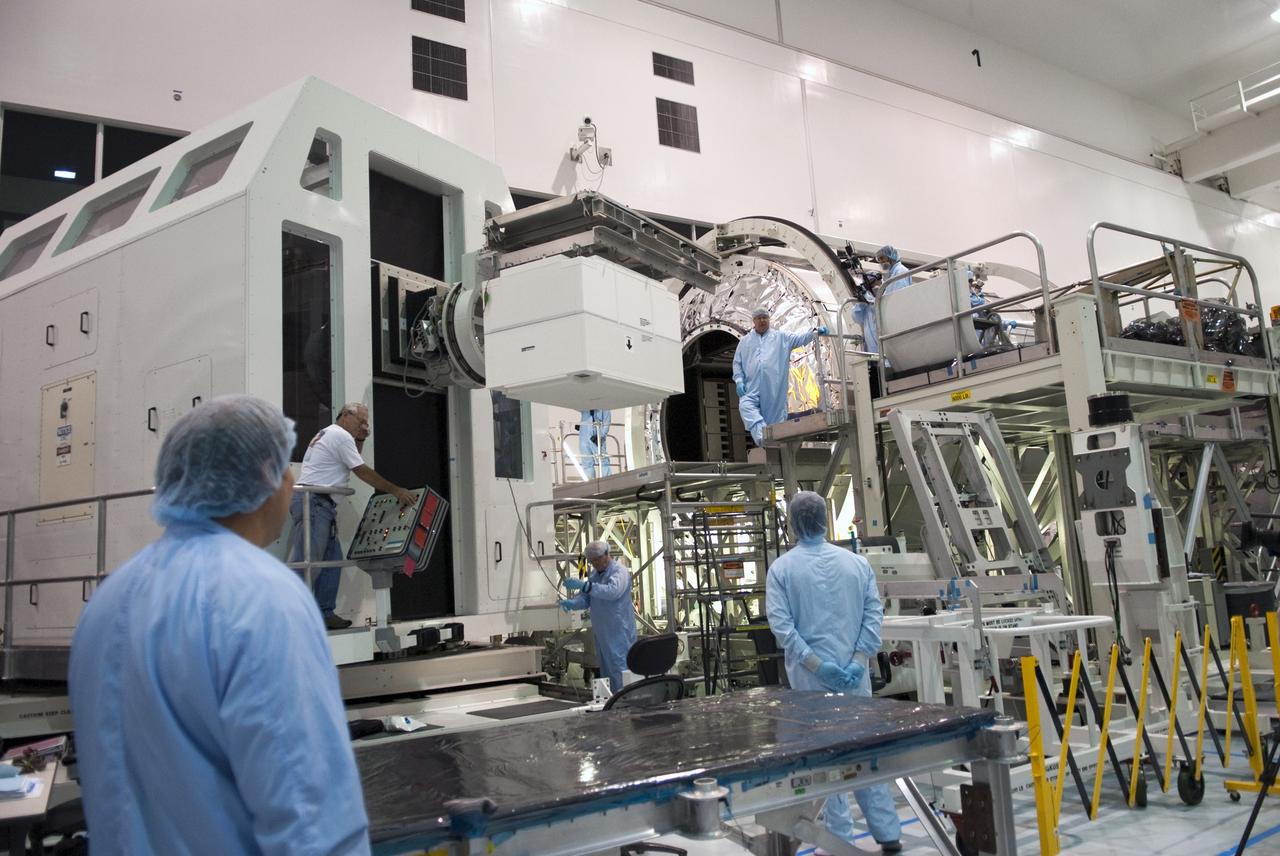
CAPE CANAVERAL, Fla. -- Technicians in the Space Station Processing Facility at NASA's Kennedy Space Center in Florida prepare to load the dexterous humanoid astronaut helper, Robonaut 2, or R2, into the Permanent Multipurpose Module, or PMM. Packed inside a launch box called SLEEPR, or Structural Launch Enclosure to Effectively Protect Robonaut, R2 will be placed in the in the same launch orientation as space shuttle Discovery's STS-133 crew members -- facing toward the nose of the shuttle with the back taking all the weight. Although R2 will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the International Space Station. STS-133 is targeted to launch Nov. 1. Photo credit: NASA/Frankie Martin

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center in Florida, technicians prepare a working model of the dexterous humanoid astronaut helper, Robonaut 2, for the media to check out before space shuttle Discovery's final flight on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder

CAPE CANAVERAL, Fla. -- At NASA's Kennedy Space Center in Florida, technicians prepare a working model of the dexterous humanoid astronaut helper, Robonaut 2, for the media to check out before space shuttle Discovery's final flight on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder

ISS034-E-013990 (2 Jan. 2013) --- In the International Space Station’s Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.

ISS036-E-013175 (28 June 2013) --- NASA astronaut Karen Nyberg, Expedition 36 flight engineer, is pictured with Robonaut 2, the first humanoid robot in space, in the Destiny laboratory of the International Space Station.

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the dexterous humanoid astronaut helper, Robonaut (R2) is on display during a media event hosted by NASA. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Jason Rhian with Spacevidcast, enthusiastically shakes the hand of Robonaut (R2) during a media event hosted by NASA. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, NASA hosted a media event featuring Robonaut (R2), a dexterous humanoid astronaut helper, to the public. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

ISS036-E-013254 (28 June 2013) --- Robonaut 2, the first humanoid robot in space, appears to have sprouted legs in this photograph recorded in the Destiny laboratory of the International Space Station. Actually, the scene was intentionally created by a couple of Expedition 36 flight engineers whose precise timing during an off-duty period provided some Shakespearean "comic relief" during a busy week aboard the orbital outpost. Some investigative work by ground personnel led to the conclusion that the legs actually belong to European Space Agency astronaut Luca Parmitano.

Astronaut Steve Swanson,Expedition 40 Commander,is photographed working with the Robonauts processing unit (or brain) in the U.S. Laboratory module.

View of Robonaut 2 during a round of testing,in the U.S. Laboratory. Photo was taken during Expedition 34.

JSC2003-E-62444 (December 2003) --- This is Robonaut B, the newer of two NASA robots used in recent hand-in-hand testing at the Johnson Space Center with human beings to evaluate their shared ability to perform certain types of extravehicular activity. In late 2003 Robonaut Unit B was retrofitted with a mobile platform. This new base, called the Robonaut Mobility Platform (RMP), adds an entirely new capability to the functionality of Unit B.

ISS030-E-075365 (14 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.
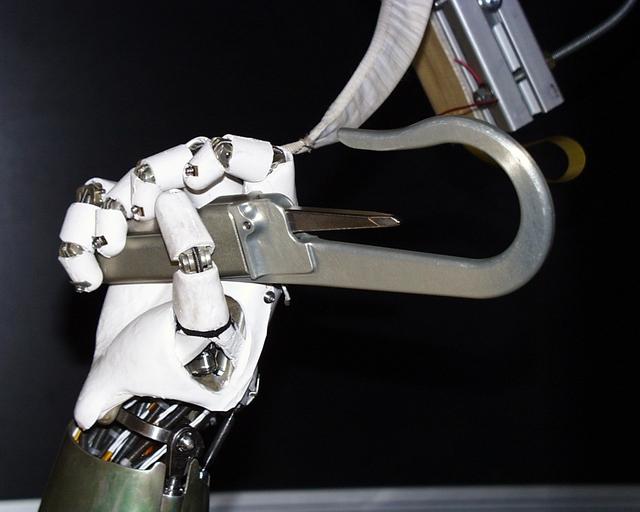
JSC2004-E-03468 (March 2004) --- This closeup view, photographed during a series of evaluations, shows the hand of a Robonaut grasping a tether hook. Joint travel for the wrist pitch and yaw is designed to meet or exceed that of the human hand in a pressurized glove and the hand and wrist parts are sized to reproduce the necessary strength to meet maximum crew requirements for extravehicular activity. Future robots like the Robonaut prototype may some day help astronauts perform important spacewalk tasks.

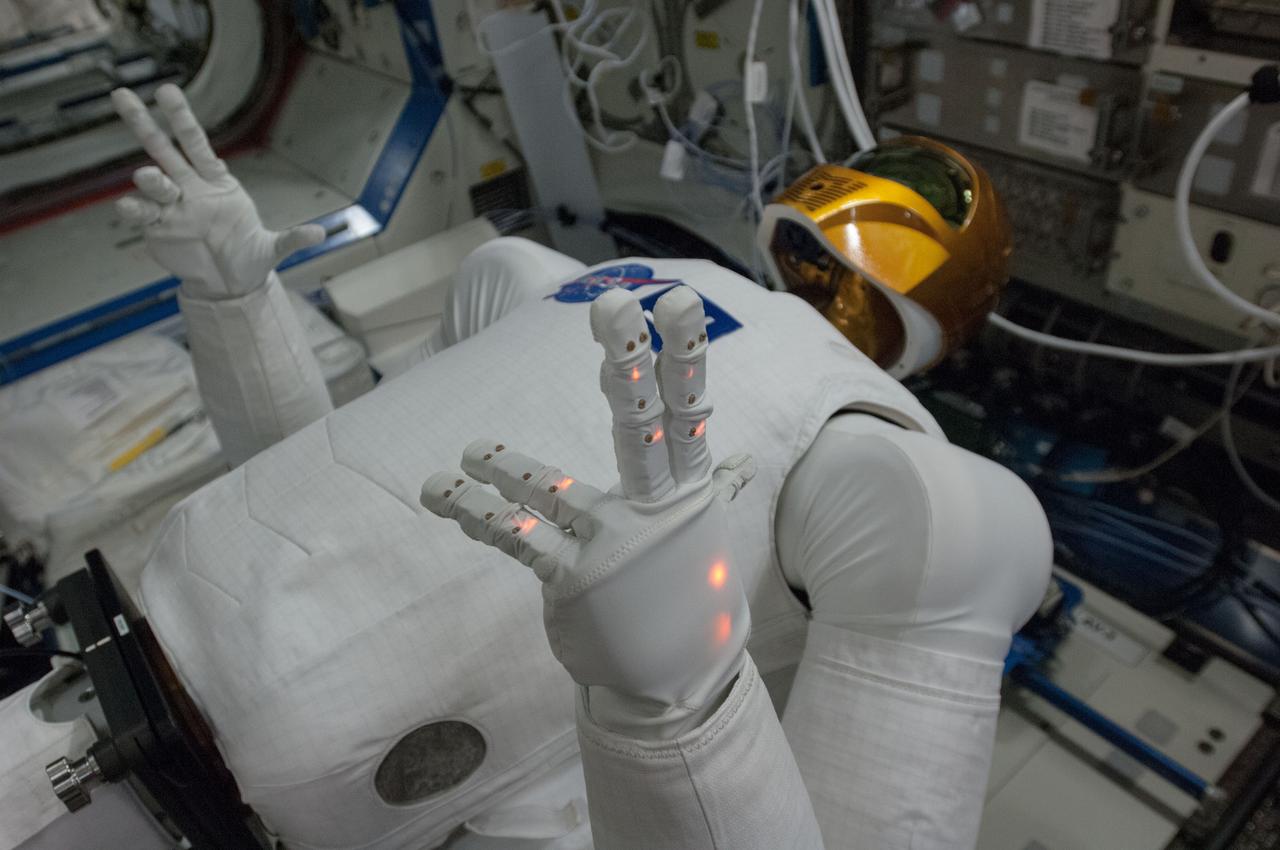
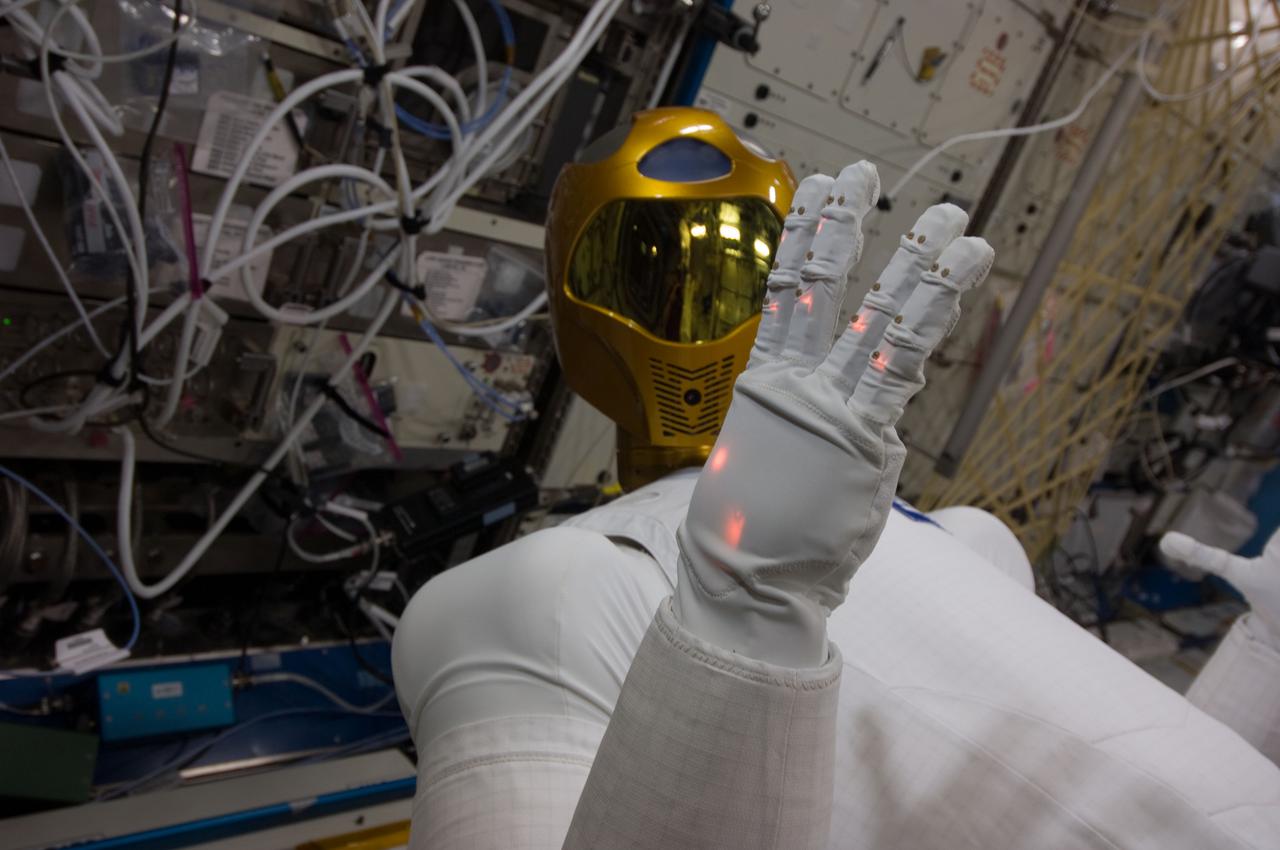
ISS030-E-135157 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.
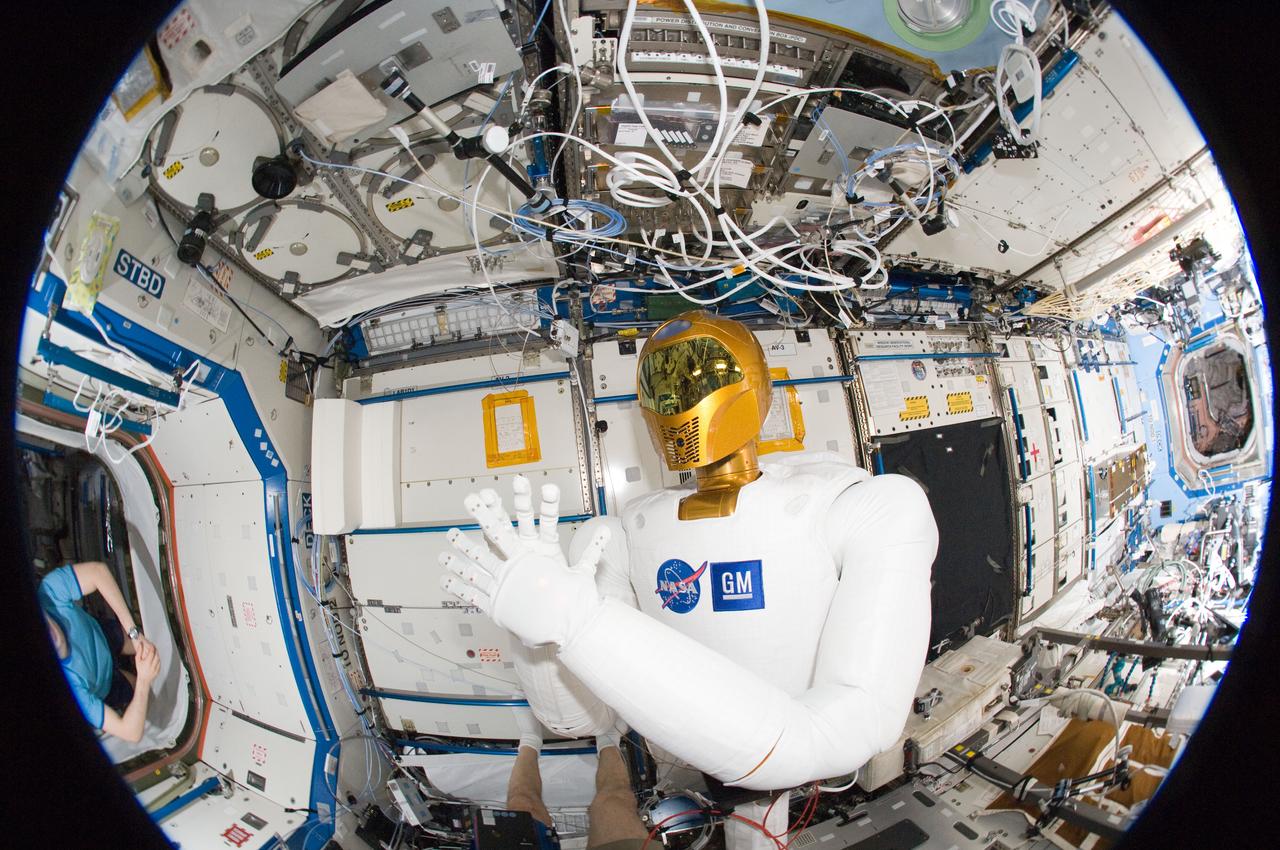
ISS030-E-135185 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135163 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.
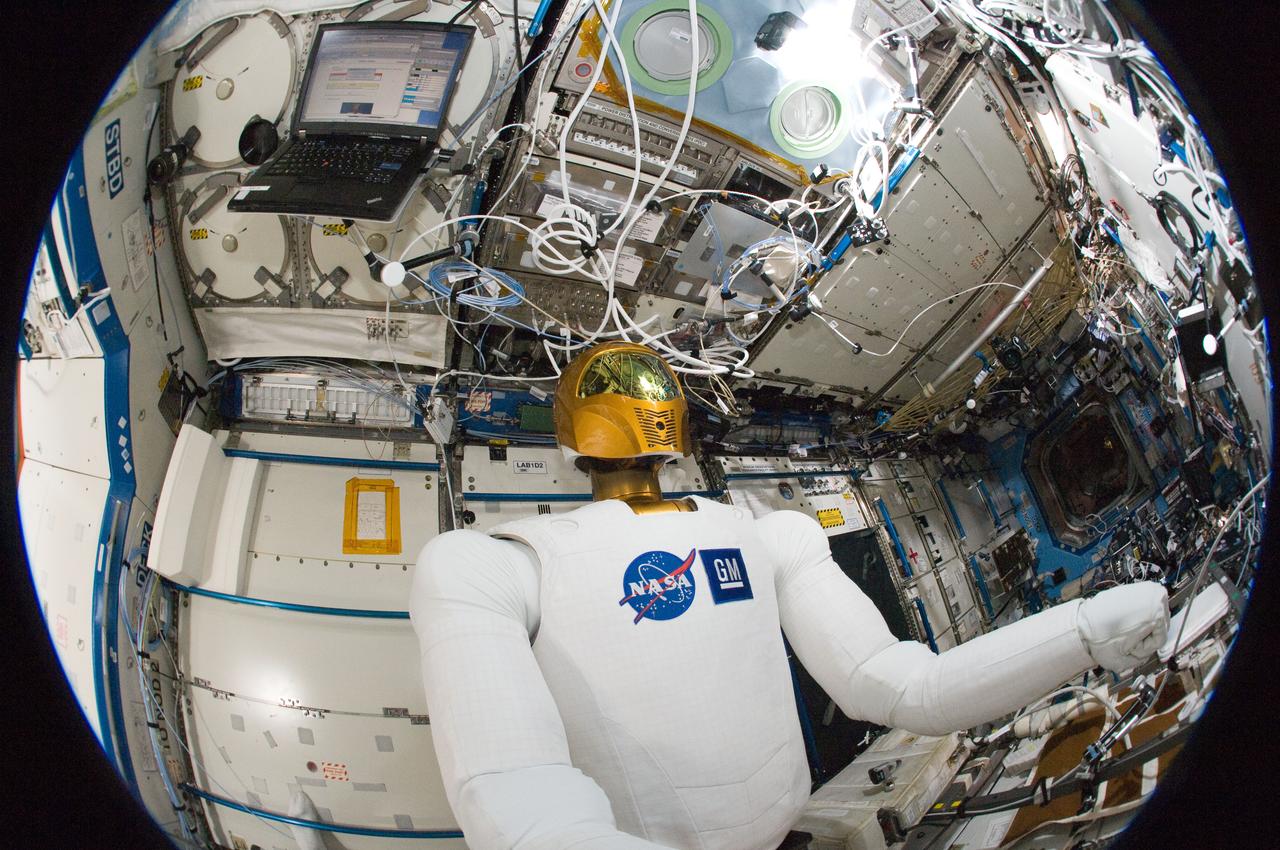
ISS030-E-135135 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135187 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135148 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.

ISS030-E-135140 (13 March 2012) --- A fisheye lens attached to an electronic still camera was used to capture this image of Robonaut 2 humanoid robot during another system checkout in the Destiny laboratory of the International Space Station. Teams on the ground commanded Robonaut through a series of dexterity tests as it spelled out ?Hello world? in sign language.
Documentation of Robonaut 2 (R2) in the Destiny U.S. Laboratory during the first use of the Robonaut Tele-operation System. Robonaut is a dexterous humanoid robot designed with the versatility and dexterity to manipulate hardware, work in high risk environments, and respond safely to unexpected obstacles. Image was released by astronaut on Twitter.
CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, a robotics engineer animates the dexterous humanoid astronaut helper, Robonaut (R2) for the participants at a media event hosted by NASA. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, Adam Sanders, General Motors robotics engineer, addresses the media at an event hosted by NASA to introduce the dexterous humanoid astronaut helper, Robonaut (R2) to the participants. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann
CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the dexterous humanoid astronaut helper, Robonaut (R2) is put through its paces during a demonstration at a media event hosted by NASA. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, the dexterous humanoid astronaut helper, Robonaut (R2) flexes its mechanical muscles during a media event hosted by NASA. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

CAPE CANAVERAL, Fla. -- CAPE CANAVERAL, Fla. -- In the Space Station Processing Facility at NASA's Kennedy Space Center in Florida, NASA hosted a media event featuring Robonaut (R2), a dexterous humanoid astronaut helper, to the participants. R2 will fly to the International Space Station aboard space shuttle Discovery on the STS-133 mission. Although it will initially only participate in operational tests, upgrades could eventually allow the robot to realize its true purpose -- helping spacewalking astronauts with tasks outside the space station. Photo credit: NASA/Jim Grossmann

ISS035-E-030779 (25 April 2013) --- R 2, the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011, awaits a direction from NASA astronaut Tom Marshburn (seen in the robot's visor), Expedition 35 Flight Engineer, who was performing the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.

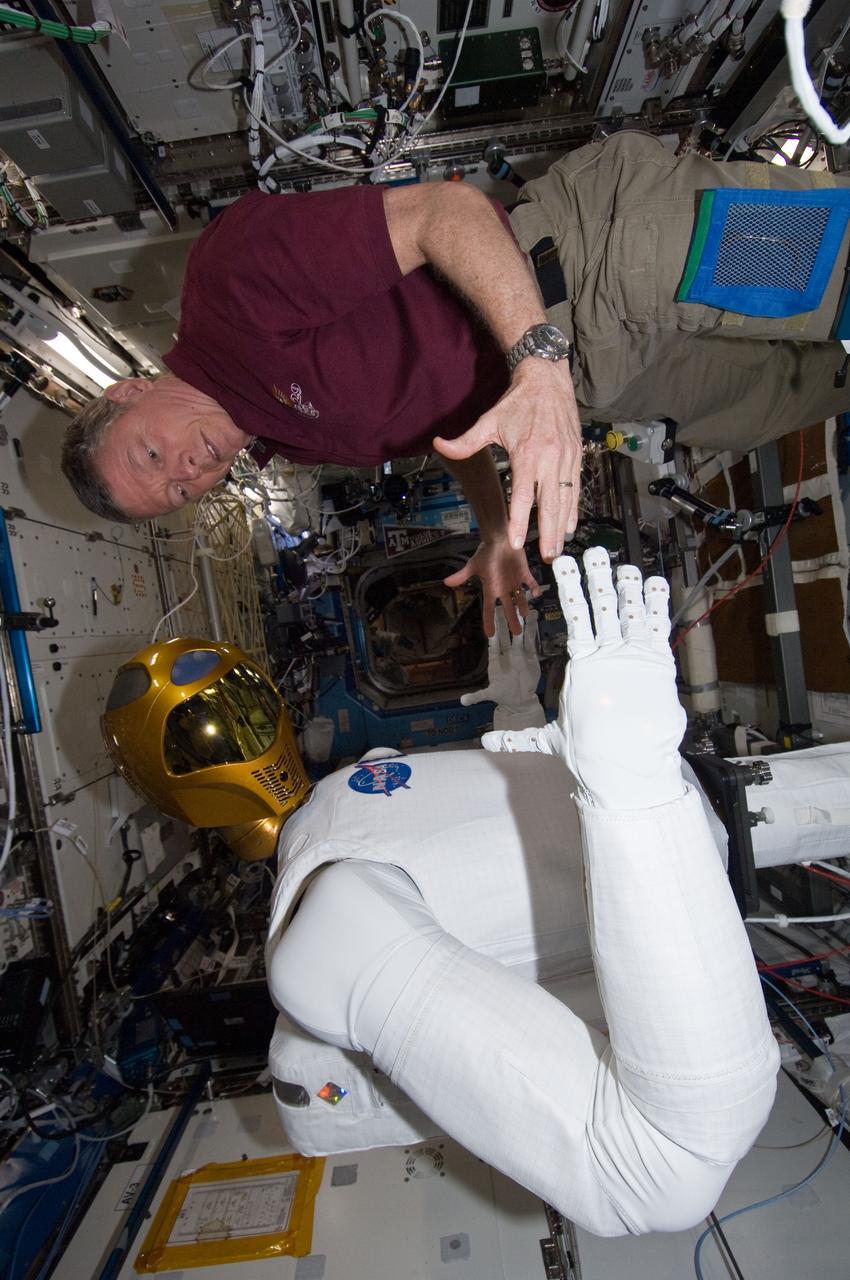
ISS029-E-025806 (13 Oct. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space – is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa, flight engineer, (both out of frame) joined forces to conduct the second onboard tests of R2, which was put in motion for the first time in orbit. After performing a coordinated power-up with the ground, the crew maneuvered each arm joint to determine the differences of the microgravity environment by setting control gains through repetitive motions. They also performed an initial vision checkout of the high-def cameras to verify they are working and in focus. The ground then commanded R2 to move to the stow-position while monitoring the motion.

ISS029-E-025807 (13 Oct. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space – is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa, flight engineer, (both out of frame) joined forces to conduct the second onboard tests of R2, which was put in motion for the first time in orbit. After performing a coordinated power-up with the ground, the crew maneuvered each arm joint to determine the differences of the microgravity environment by setting control gains through repetitive motions. They also performed an initial vision checkout of the high-def cameras to verify they are working and in focus. The ground then commanded R2 to move to the stow-position while monitoring the motion.
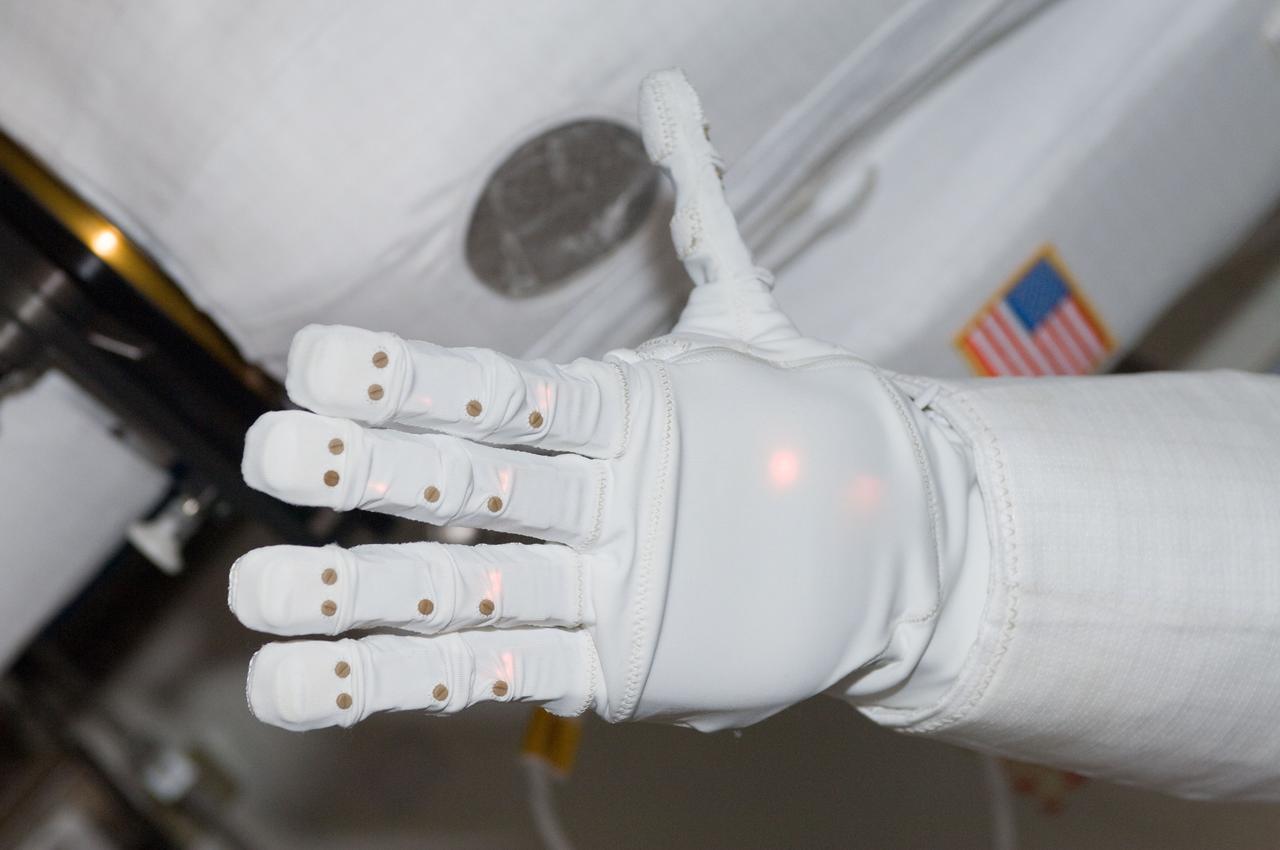
ISS030-E-075367 (14 Feb. 2012) --- A close-up of a hand of Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.

ISS026-E-034328 (15 March 2011) --- Russian cosmonaut Oleg Skripochka, Expedition 26 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS030-E-074075 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, and NASA astronaut Dan Burbank, Expedition 30 commander, are pictured in the Destiny laboratory of the International Space Station during R2?s initial checkouts.

ISS030-E-074077 (15 Feb. 2012) --- Robonaut 2, nicknamed R2, and NASA astronaut Dan Burbank, Expedition 30 commander, are pictured in the Destiny laboratory of the International Space Station during R2?s initial checkouts.

ISS026-E-034297 (15 March 2011) --- NASA astronaut Cady Coleman, Expedition 26/27 flight engineer, poses with Robonaut 2, the dexterous humanoid astronaut helper, in the Destiny laboratory of the International Space Station.

ISS036-E-022474 (22 July 2013) --- NASA astronaut Karen Nyberg, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, in the Destiny laboratory of the International Space Station.

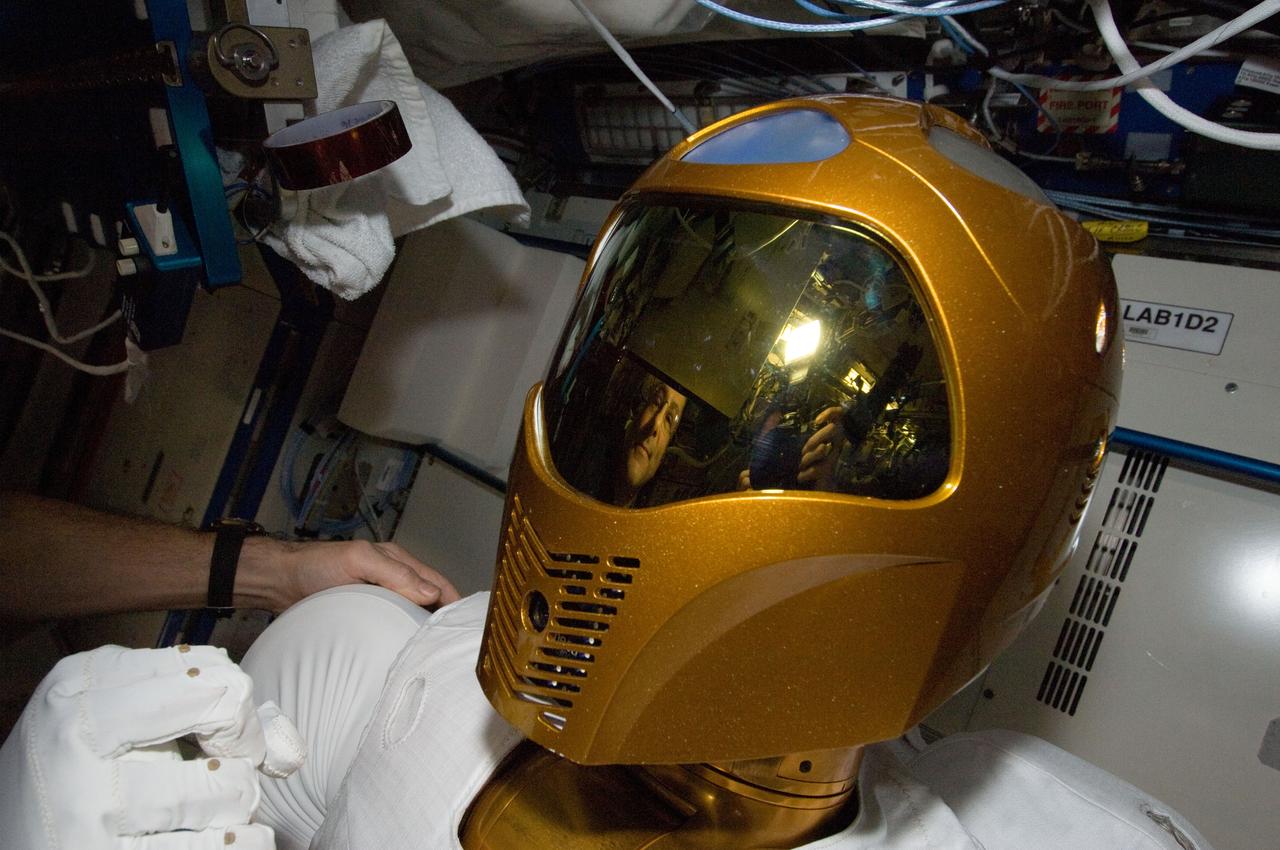
ISS030-E-075366 (14 Feb. 2012) --- A close-up of the head of Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.
ISS030-E-148256 (13 March 2012) --- Robonaut 2 humanoid robot is featured in this image photographed by an Expedition 30 crew member during another system check out in the Destiny laboratory of the International Space Station.

Photographic documentation of Robonaut activities involving joint task operations with a EVA suited astronaut (Nancy Currie) in bldg 9N,rm 1113 (Robonaut lab). Close-up view of Currie (in her EMU) working with the Robonauts (00299). Currie and one Robonaut work at a task .

ISS034-E-031125 (17 Jan. 2013) --- In the International Space Station's Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.

ISS034-E-031124 (17 Jan. 2013) --- In the International Space Station's Destiny laboratory, Robonaut 2 is pictured during a round of testing for the first humanoid robot in space. Ground teams put Robonaut through its paces as they remotely commanded it to operate valves on a task board. Robonaut is a testbed for exploring new robotic capabilities in space, and its form and dexterity allow it to use the same tools and control panels as its human counterparts do aboard the station.

iss050e037542 (2/1/2017) --- NASA astronauts Peggy Whitson, Shane Kimbrough and European Space Agency (ESA) astronaut Thomas Pesquet, posing with Robonaut, in the U.S. Laboratory. Robonaut is a humanoid robot designed with the versatility and dexterity to manipulate hardware, work in high risk environments, and respond safely to unexpected obstacles. Robonaut is comprised of a torso with two arms and a head, and two legs with end effectors that enable the robot to translate inside the ISS by interfacing with handrails and seat track.

ISS030-E-075379 (14 Feb. 2012) --- Robonaut 2, nicknamed R2, is pictured during a checkout and activities session in the Destiny laboratory of the International Space Station.

ISS029-E-039234 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS036-E-013172 (28 June 2013) --- NASA astronaut Chris Cassidy, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.

ISS029-E-039213 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039218 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
ISS029-E-039212 (4 Nov. 2011) --- NASA astronaut Mike Fossum, Expedition 29 commander, works with Robonaut 2 in the Destiny laboratory of the International Space Station. Fossum and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
ISS029-E-039226 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039197 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.
ISS029-E-039211 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS036-E-013170 (28 June 2013) --- NASA astronaut Chris Cassidy, Expedition 36 flight engineer, works with Robonaut 2, the first humanoid robot in space, during a round of ground-commanded tests in the Destiny laboratory of the International Space Station. R2 was assembled earlier this week for several days of data takes by the payload controllers at the Marshall Space Flight Center.

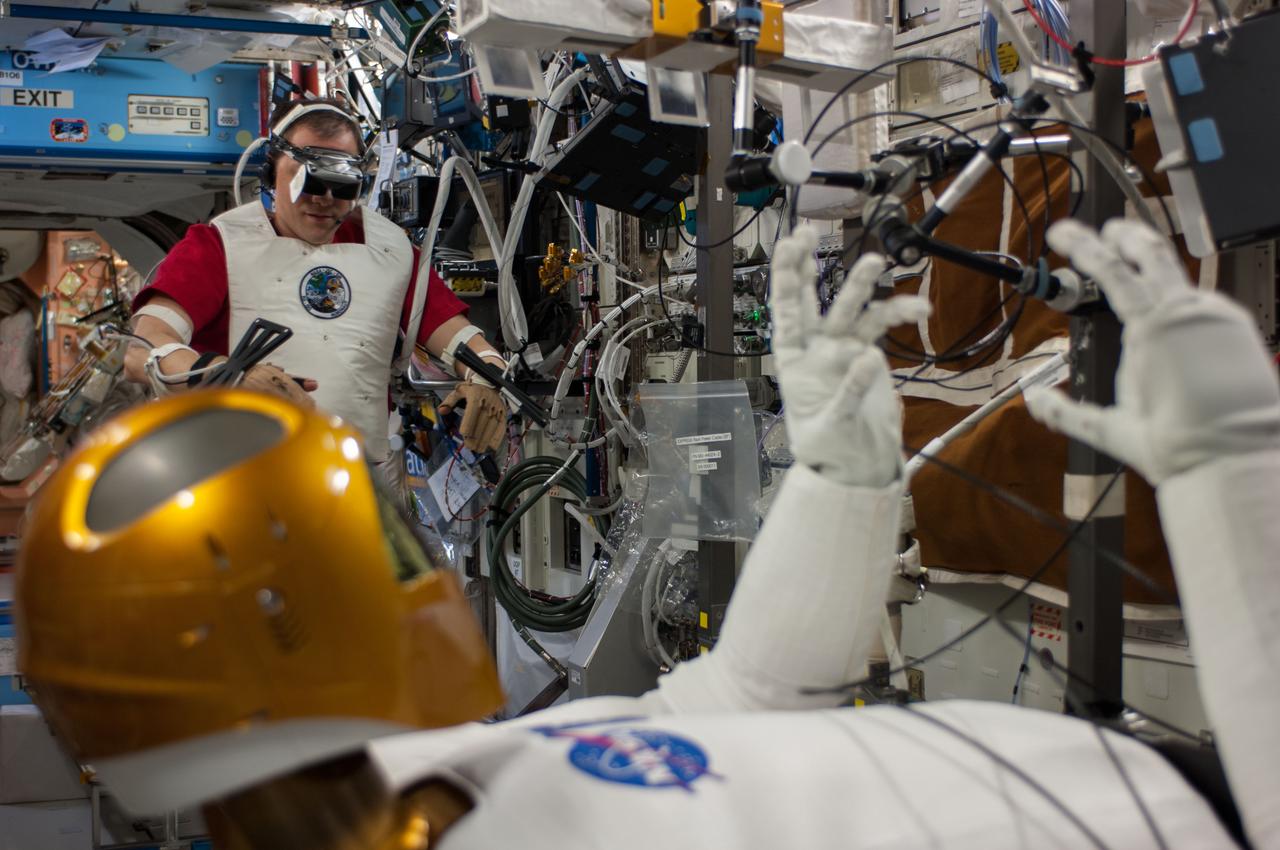
ISS036-E-029109 (6 Aug. 2013) --- In the International Space Station’s Destiny laboratory, NASA astronaut Chris Cassidy, Expedition 36 flight engineer, wears tele-operation gear consisting of a vest, gloves and visor to telerobotically test Robonaut 2’s maneuvers. Cassidy was able to manipulate R2’s head, neck, arms and fingers telerobotically through his own movements as well as through verbal commands.

ISS029-E-039239 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS036-E-029110 (6 Aug. 2013) --- In the International Space Station’s Destiny laboratory, NASA astronaut Chris Cassidy, Expedition 36 flight engineer, wears tele-operation gear consisting of a vest, gloves and visor to telerobotically test Robonaut 2’s maneuvers. Cassidy was able to manipulate R2’s head, neck, arms and fingers telerobotically through his own movements as well as through verbal commands.

ISS029-E-039219 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS029-E-039235 (4 Nov. 2011) --- Robonaut 2 -- the first dexterous humanoid robot in space ? is pictured in the Destiny laboratory of the International Space Station. NASA astronaut Mike Fossum, Expedition 29 commander; and Japan Aerospace Exploration Agency astronaut Satoshi Furukawa (both out of frame), flight engineer, spent several hours in Destiny checking out and operating R2.

ISS038-E-013710 (9 Dec. 2013) --- In the International Space Station's Destiny laboratory, NASA astronaut Rick Mastracchio, Expedition 38 flight engineer, prepares Robonaut 2 for an upcoming ground-commanded firmware update that will support the installation of a pair of legs for the humanoid robot. R2 was designed to test out the capability of a robot to perform tasks deemed too dangerous or mundane for astronauts. Robonaut's legs are scheduled to arrive to the station aboard the SpaceX-3 commercial cargo mission in February 2014.

ISS038-E-013714 (9 Dec. 2013) --- In the International Space Station's Destiny laboratory, NASA astronaut Rick Mastracchio, Expedition 38 flight engineer, prepares Robonaut 2 for an upcoming ground-commanded firmware update that will support the installation of a pair of legs for the humanoid robot. R2 was designed to test out the capability of a robot to perform tasks deemed too dangerous or mundane for astronauts. Robonaut's legs are scheduled to arrive to the station aboard the SpaceX-3 commercial cargo mission in February 2014.

ISS038-E-013712 (9 Dec. 2013) --- In the International Space Station's Destiny laboratory, NASA astronaut Rick Mastracchio, Expedition 38 flight engineer, prepares Robonaut 2 for an upcoming ground-commanded firmware update that will support the installation of a pair of legs for the humanoid robot. R2 was designed to test out the capability of a robot to perform tasks deemed too dangerous or mundane for astronauts. Robonaut's legs are scheduled to arrive to the station aboard the SpaceX-3 commercial cargo mission in February 2014.

CAPE CANAVERAL, Fla. -- The enormous Vehicle Assembly Building is seen prominently in the background at NASA's Kennedy Space Center in Florida, overlooking the parking spaces below the Press Site filled with news satellite trucks and media vehicles, there to cover the final launch of space shuttle Discovery on the STS-133 mission. Discovery and its six-member crew will deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as Robonaut 2 to the International Space Station. For more information on the STS-133 mission, visit www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts133/. Photo Credit: NASA/Troy Cryder
ISS035-E-030791 (25 April 2013) --- NASA astronaut Tom Marshburn (pictured in background), Expedition 35 Flight Engineer, performs the second of a two-day session of Taskboard and Tele-operations with R 2 onboard the International Space Station. R 2 is the dexterous humanoid robot that was carried up to the station by one of NASA's final shuttle flights in 2011. The goals for these activities were orientation and depth familiarization, individual hand grasp and hand-to-hand object transfer; and all were completed nominally. The Robonaut Tele-operation System is used to demonstrate the ability to effectively control Robonaut from the station. The research objective is to evaluate this control method in terms of its ability to perform tasks as well as measure the time necessary to complete the defined tasks. This capability will need to be developed to support future operations of Robonaut in the space environment as well as certain intravehicular activity situations.