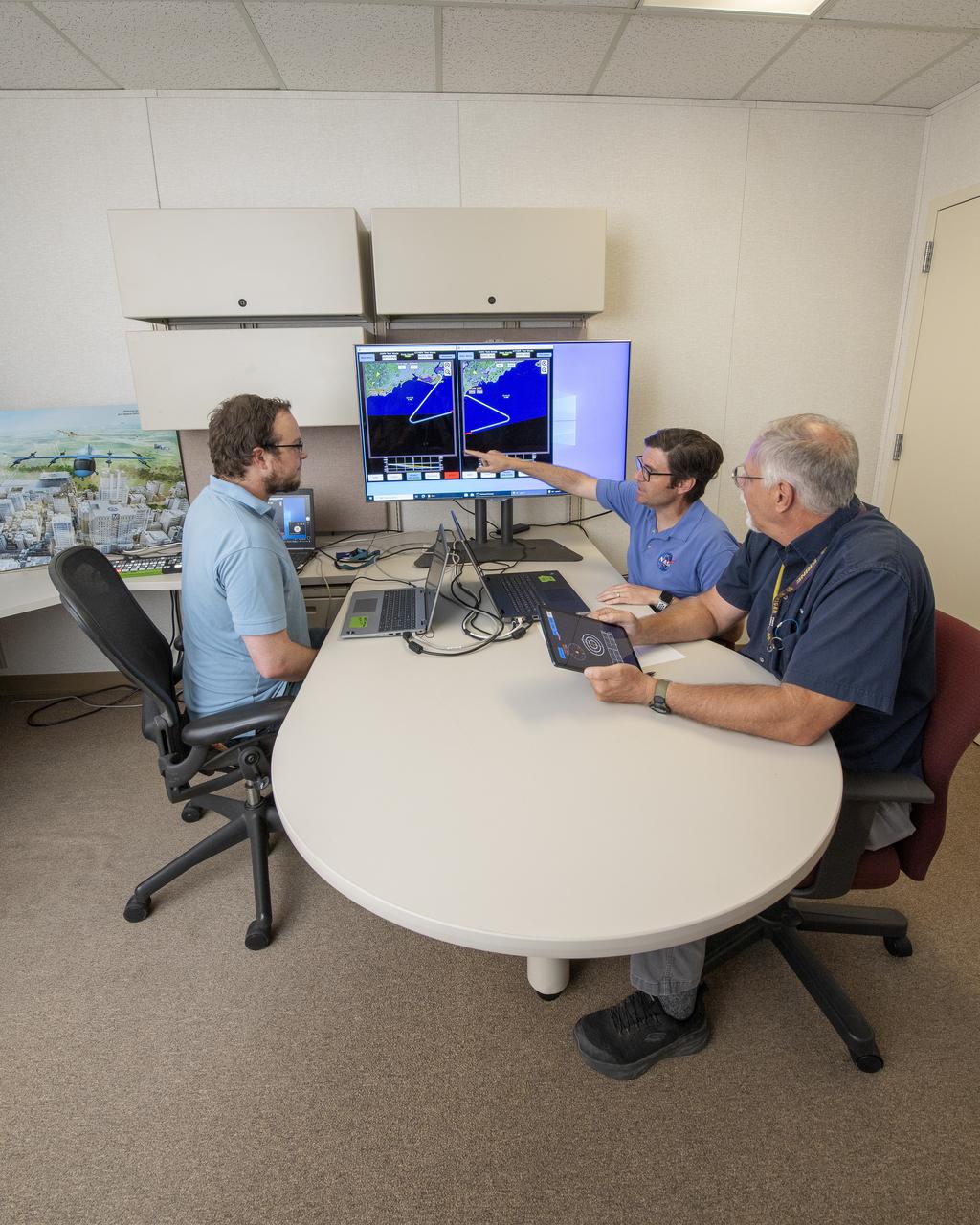
NASA software developer, Ethan Williams, left, pilot Scott Howe, and operations test consultant Jan Scofield run a flight path management software simulation at NASA’s Armstrong Flight Research Center in Edwards, California in May 2023. This simulation research supports the integration of automated systems for the advanced air mobility mission.

This image is the result of the first observation of a target selected autonomously by NASA Opportunity using newly developed and uploaded software called AEGIS. The false color makes some differences between materials easier to see.

This true-color image is the result of the first observation of a target selected autonomously by NASA Mars Exploration Rover Opportunity using newly developed and uploaded software named Autonomous Exploration for Gathering Increased Science, or AEGIS.
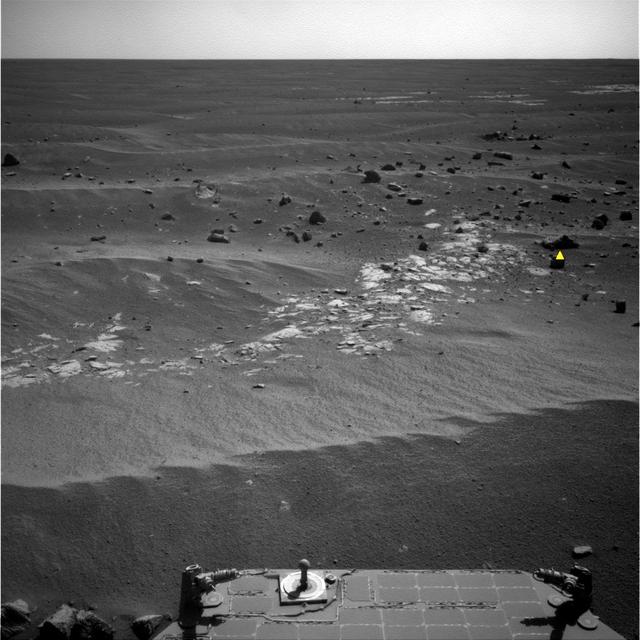
NASA Opportunity used newly developed and uploaded software called AEGIS, to analyze images to identify features that best matched criteria for selecting an observation target; the criteria in this image -- rocks that are larger and darker than others.

A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.
A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.

A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.
A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.
A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.

A banner signing event was held April 22, 2019, at NASA’s Kennedy Space Center in Florida, to mark the accomplishments of the Kennedy engineering team that supported the Ground Support Equipment (GSE) Subsystem Software development. The team gathered in the observation area of the Operations Support Building II with a view of the Vehicle Assembly Building behind them. This team includes the software leads, local developers, remote developers, modelers, project engineers, software quality assurance, build team members, integrators, system engineers, a chief engineer and some software managers. There are 60 unique instances of GSE Subsystem Software code. As of today, 58 of those 60 instances have completed software Level 5 Verification (L5V) and are in the process of completing Subsystem Verification & Validation.

NASA engineers and test directors gather in Firing Room 3 in the Launch Control Center at NASA's Kennedy Space Center in Florida, to watch a demonstration of the automated command and control software for the agency's Space Launch System (SLS) and Orion spacecraft. The software is called the Ground Launch Sequencer. It will be responsible for nearly all of the launch commit criteria during the final phases of launch countdowns. The Ground and Flight Application Software Team (GFAST) demonstrated the software. It was developed by the Command, Control and Communications team in the Ground Systems Development and Operations (GSDO) Program. GSDO is helping to prepare the center for the first test flight of Orion atop the SLS on Exploration Mission 1.

NASA engineers and test directors gather in Firing Room 3 in the Launch Control Center at NASA's Kennedy Space Center in Florida, to watch a demonstration of the automated command and control software for the agency's Space Launch System (SLS) and Orion spacecraft. The software is called the Ground Launch Sequencer. It will be responsible for nearly all of the launch commit criteria during the final phases of launch countdowns. The Ground and Flight Application Software Team (GFAST) demonstrated the software. It was developed by the Command, Control and Communications team in the Ground Systems Development and Operations (GSDO) Program. GSDO is helping to prepare the center for the first test flight of Orion atop the SLS on Exploration Mission 1.

NASA engineers and test directors gather in Firing Room 3 in the Launch Control Center at NASA's Kennedy Space Center in Florida, to watch a demonstration of the automated command and control software for the agency's Space Launch System (SLS) and Orion spacecraft. The software is called the Ground Launch Sequencer. It will be responsible for nearly all of the launch commit criteria during the final phases of launch countdowns. The Ground and Flight Application Software Team (GFAST) demonstrated the software. It was developed by the Command, Control and Communications team in the Ground Systems Development and Operations (GSDO) Program. GSDO is helping to prepare the center for the first test flight of Orion atop the SLS on Exploration Mission 1.

THE 2013 ASTRONAUT CANDIDATE CLASS VISITED THE THRUST VECTOR CONTROL TEST LAB AT MARSHALL'S PROPULSION RESEARCH DEVELOPMENT LABORATORY WHERE ENGINEERS ARE DEVELOPING AND TESTING THE SPACE LAUNCH SYSTEM'S GUIDANCE, NAVIGATION AND CONTROL SOFTWARE AND AVIONICS HARDWARE.

George Plattsmier, ARTEMIS developer supporting hardware/software development, integration and testing for the Space Launch System (SLS) in the Systems Integration Lab (SIL), Building 4205, lab 116.

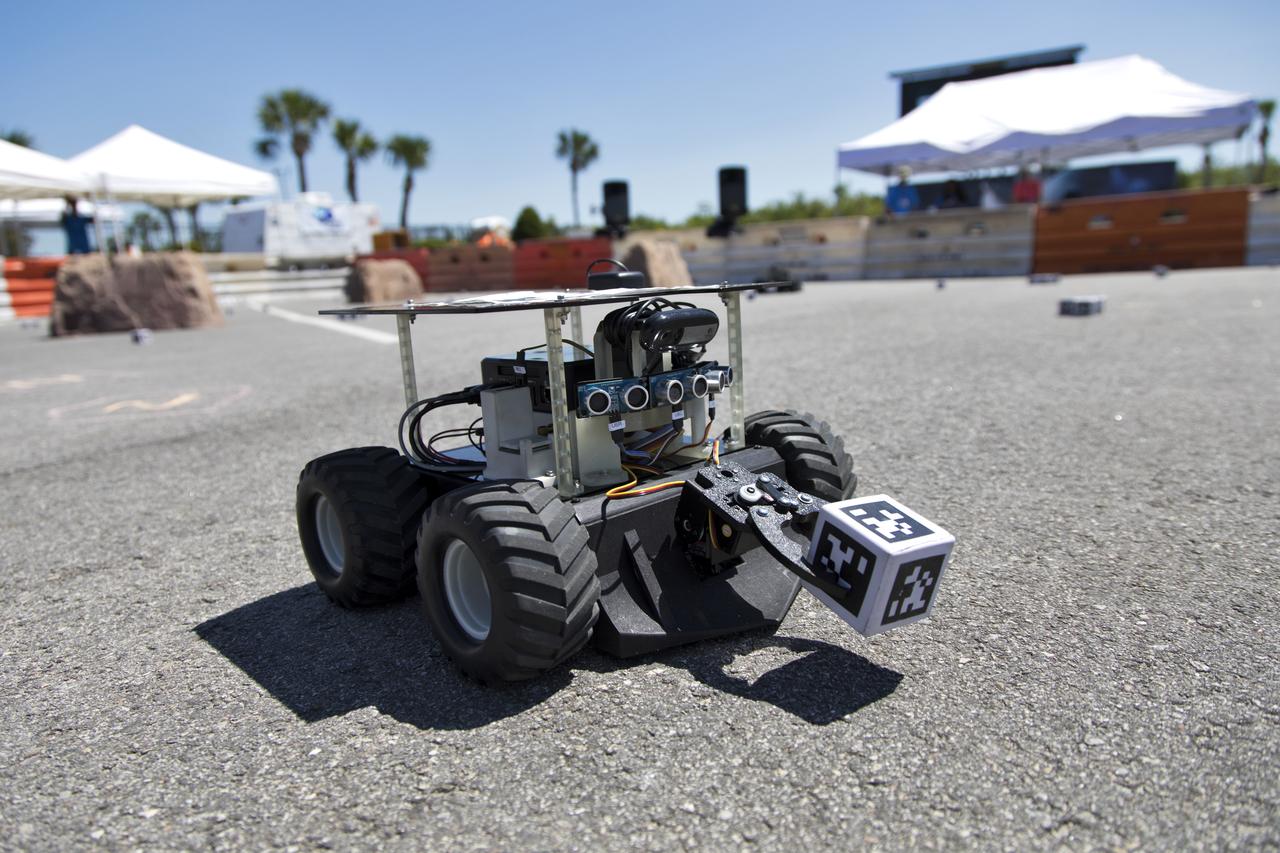
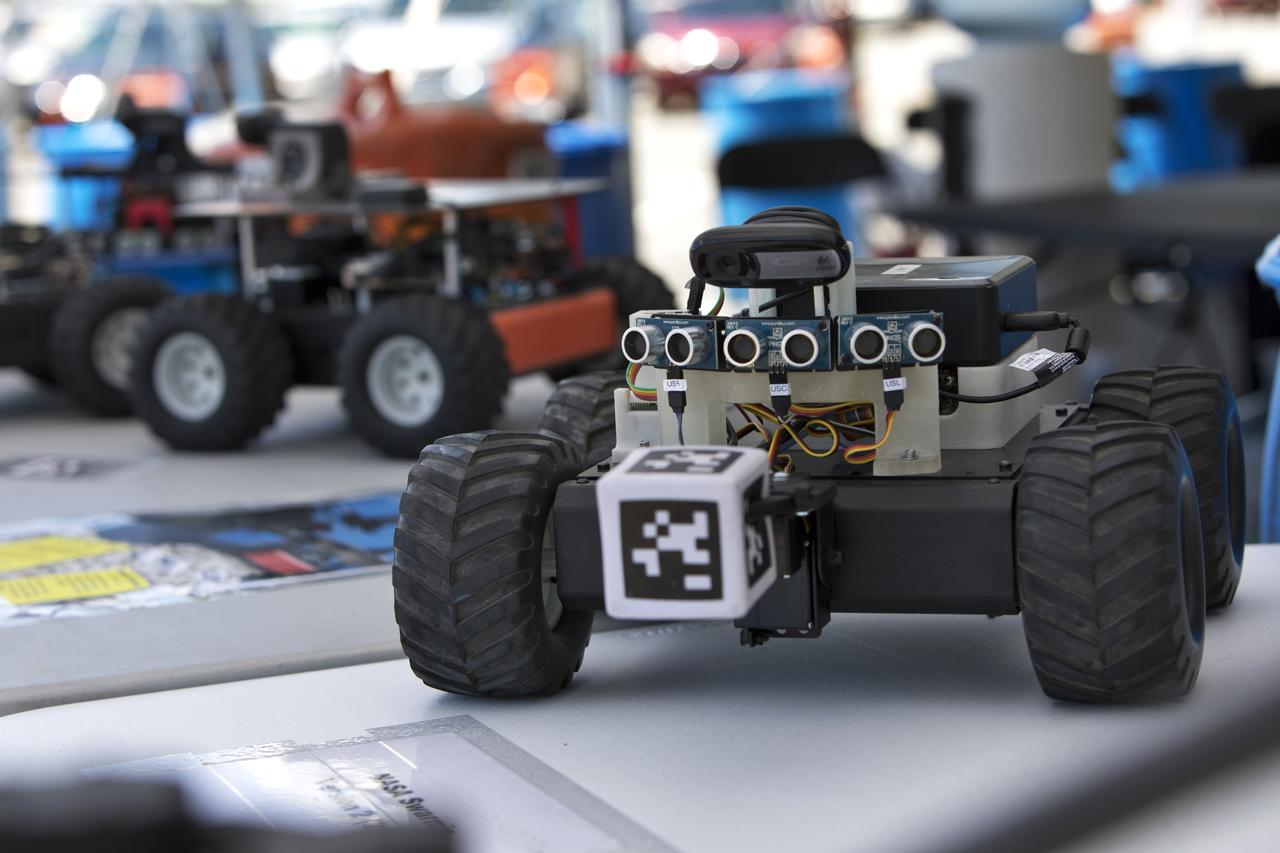
CAPE CANAVERAL, Fla. – The four "Swarmies" robots on a table with the software simulation used to develop the program to control the robots. Photo credit: NASA/Dmitri Gerondidakis
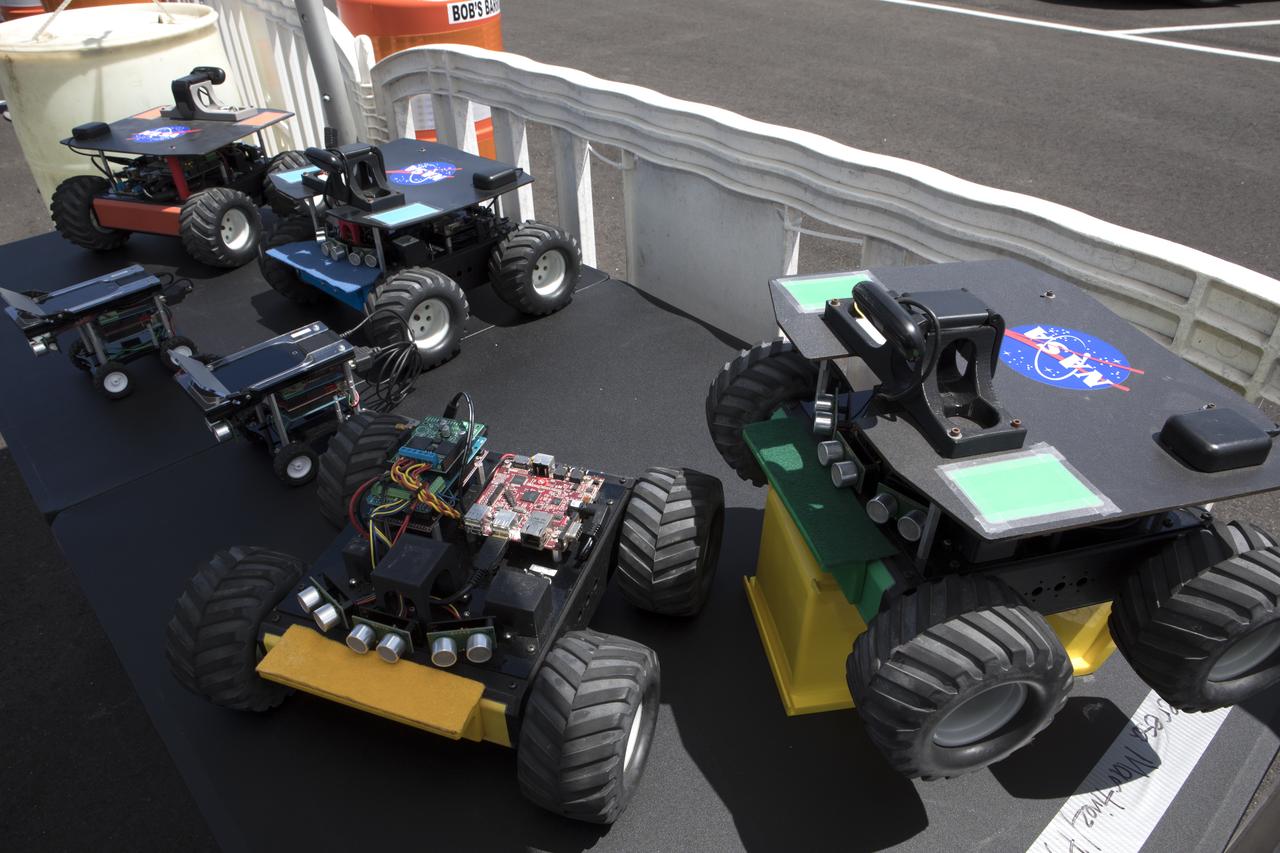
A display at the Kennedy Space Center Visitor Complex describes the purpose of Swarmies. Computer scientists are developing these robots focusing not so much on the hardware, but the software. In the spaceport's annual Swarmathon, students from 12 colleges and universities across the nation were invited to develop software code to operate Swarmies to help find resources when astronauts explore distant planets, such as Mars.

S91-50404 (1 Nov 1991) --- Bebe Ly of the Information Systems Directorate's (ISD) Software Technology Branch at the Johnson Space Center (JSC) gives virtual reality a try. The stereo video goggles and head[phones allow her to see and hear in a computer-generated world and the gloves allow her to move around and grasp objects. Ly is a member of the team that developed the C Language Integrated production System (CLIPS) which has been instrumental in developing several of the systems to be demonstrated in an upcoming Software Technology Exposition at JSC.

A display at the Kennedy Space Center Visitor Complex describes the purpose of Swarmies. Computer scientists are developing these robots focusing not so much on the hardware, but the software. In the spaceport's annual Swarmathon, students from 12 colleges and universities across the nation were invited to develop software code to operate Swarmies to help find resources when astronauts explore distant planets, such as Mars.

NASA engineers and test directors gather in Firing Room 3 in the Launch Control Center at NASA's Kennedy Space Center in Florida, to watch a demonstration of the automated command and control software for the agency's Space Launch System (SLS) and Orion spacecraft. In front, far right, is Charlie Blackwell-Thompson, launch director for Exploration Mission 1 (EM-1). The software is called the Ground Launch Sequencer. It will be responsible for nearly all of the launch commit criteria during the final phases of launch countdowns. The Ground and Flight Application Software Team (GFAST) demonstrated the software. It was developed by the Command, Control and Communications team in the Ground Systems Development and Operations (GSDO) Program. GSDO is helping to prepare the center for the first test flight of Orion atop the SLS on EM-1.

David L. Iverson of NASA Ames Research center, Moffett Field, California, led development of computer software to monitor the conditions of the gyroscopes that keep the International Space Station (ISS) properly oriented in space as the ISS orbits Earth. The gyroscopes are flywheels that control the station's attitude without the use of propellant fuel. NASA computer scientists designed the new software, the Inductive Monitoring System, to detect warning signs that precede a gyroscope's failure. According to NASA officials, engineers will add the new software tool to a group of existing tools to identify and track problems related to the gyroscopes. If the software detects warning signs, it will quickly warn the space station's mission control center.

Ben Feist, software engineer on the Extravehicular Activity Mission System Software (EMSS) team, uses the suite of software he and other members of the Astromaterials Research and Exploration Science (ARES) division at NASA's Johnson Space Center in Houston developed to plan and monitor spacewalks. The JETT 5 field test was the first time this software was fully integrated into a simulated mission, supporting both science and mission control operations. JETT 5 was a week-long field test conducted in the lunar-like landscape of the San Francisco Volcanic Field near Flagstaff, Arizona, with a team of flight controllers and scientists at Johnson monitoring and guiding the activities. Credit: NASA/Helen Arase Vargas
JEFF CHEATHAM, SENIOR METROLOGIST AT THE MARSHALL METROLOGY AND CALIBRATION LABORATORY, SPENT 12 YEARS DEVELOPING 2400 AUTOMATED SOFTWARE PROCEDURES USED FOR CALIBRATION AND TESTING SPACE VEHICLES AND EQUIPMENT

The work was among 25 projects funded by NASA’s Mars Exploration Program this past year to push the limits of future technologies. Sand dunes confused the navigation algorithm of the Ingenuity Mars helicopter during several of its last flights, including its 72nd and final flight on the Red Planet in January 2024. The navigation software in development would help future rotorcraft track the surface of especially bland, featureless terrain similar to the barren Dumont Dunes. Tests also included flights over a region in Death Valley called Mars Hill, which is littered with rubbly volcanic rocks and has been used by NASA’s Mars researchers since the 1970s, during preparations for the Viking lander missions.

Senior Software Engineer Taylor Whitaker (right) and Software Engineering intern Ashten Akemoto create a mobility routine for Astrobotic’s CubeRover – a lightweight, modular planetary rover – using the company’s ground software at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the spaceport’s Swamp Works facility and the Granular Mechanics and Regolith Operations Laboratory to conduct mobility testing of their rover. The laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, will help depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.
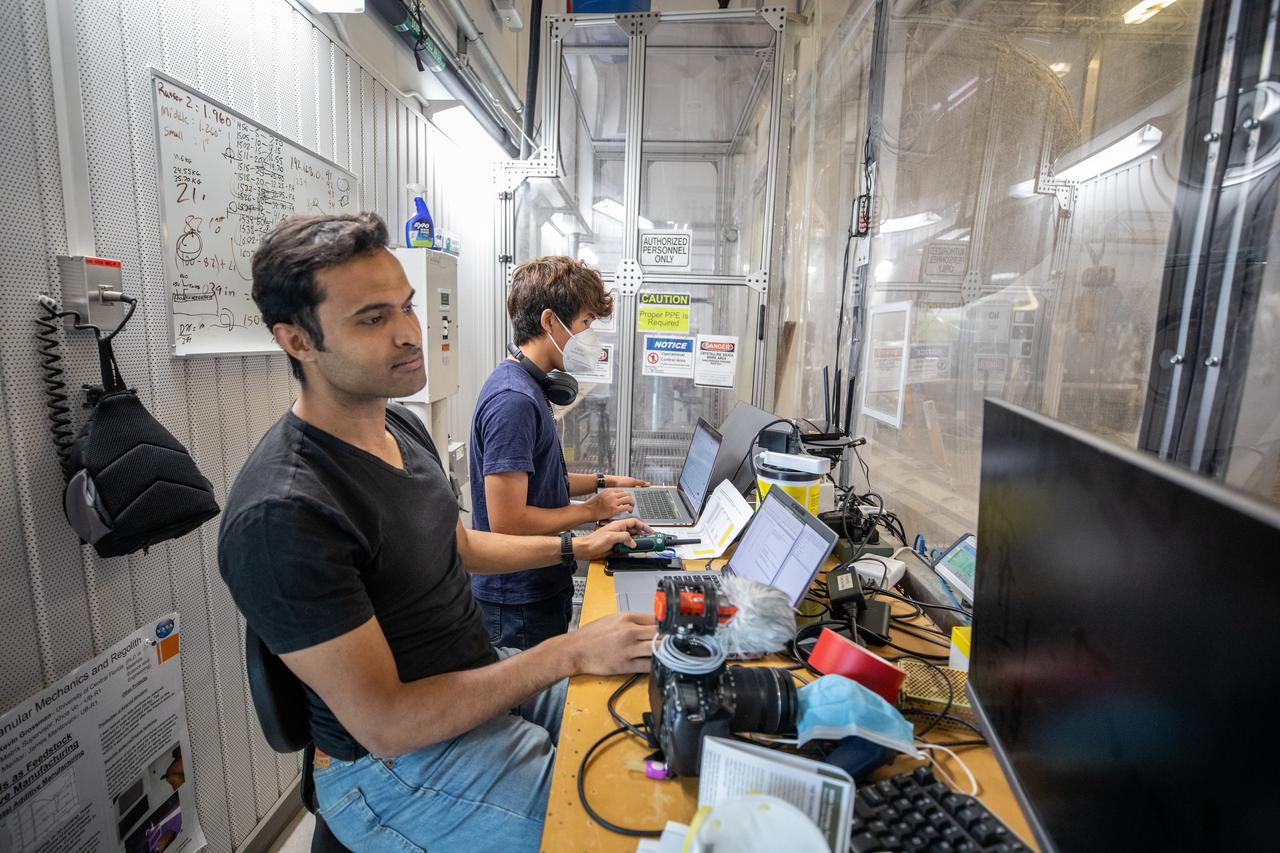
Senior Embedded Software Engineer Aamer Almujahed (left) and Software Engineering intern Ashten Akemoto run the ground software for Astrobotic’s CubeRover drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

Robotics Software Engineer II Chris Rampolla (right) and Software Engineering intern Ashten Akemoto issue commands to Astrobotic’s CubeRover using the company’s ground software during mobility testing at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the spaceport’s Swamp Works facility and the Granular Mechanics and Regolith Operations Laboratory to conduct mobility testing of their rover. The laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, will help depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award has provided additional funding for continued development into a more mature rover.

A researcher from NASA’s Jet Propulsion Laboratory in Southern California monitors a drone as it flies over sand dunes in September 2025. This image was captured in Death Valley National Park during a larger test campaign to develop navigation software that would guide future rotorcraft on Mars. The work was among 25 projects funded by NASA’s Mars Exploration Program this past year to push the limits of future technologies. Sand dunes confused the navigation algorithm of the Ingenuity Mars helicopter during several of its last flights, including its 72nd and final flight on the Red Planet in January 2024. The navigation software in development would help future rotorcraft track the surface of especially bland, featureless terrain similar to the barren sand dunes seen in parts of Death Valley. Tests also included flights over a region of the park called Mars Hill, which is littered with rubbly volcanic rocks and has been used by NASA’s Mars researchers since the 1970s, during preparations for the Viking lander missions.
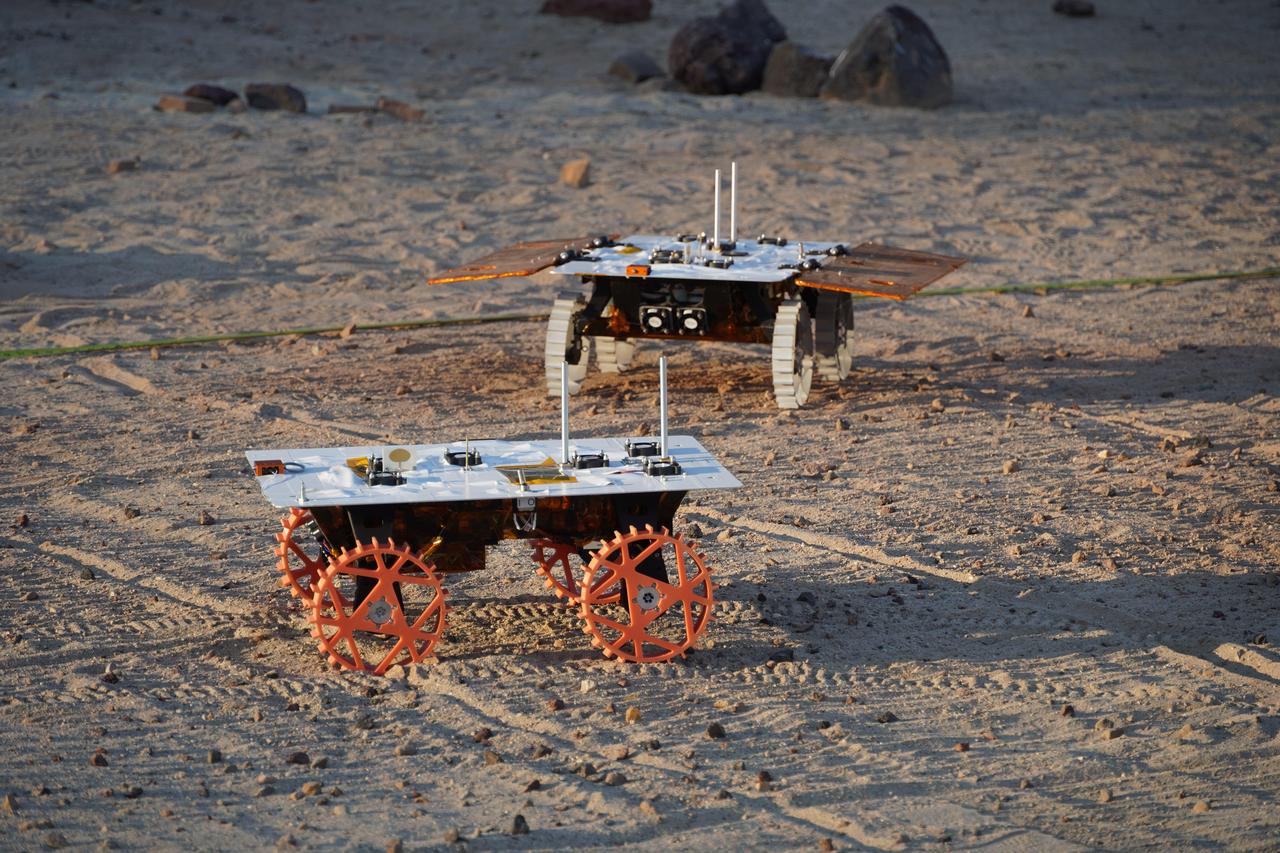
Two full-scale development model rovers that are part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drive in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in August 2023. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. The rovers being tested here are similar in size and appearance to the flight models – still being built at the time of this image – that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used for drive tests outside the clean room. In this image, one rover is fitted with a stand-in for solar panels, while the other rover is not. A series of Mars Yard tests with the development models confirmed CADRE hardware and software can work together to accomplish key goals for the project. The rovers drove together in formation. Faced with unexpected obstacles in the way, they adjusted their plans as a group by sharing updated maps and replanning coordinated paths. And when one rover was low on battery charge, the whole team paused so they could later continue together. Several drives were performed at night under large flood lamps so the rovers could experience extreme shadows and lighting that approximate what they'll encounter during the lunar daytime. https://photojournal.jpl.nasa.gov/catalog/PIA26168

iss067e066379 (5/23/2022) --- A view of the SpaceChain 2.0 investigation in the cupola module aboard the International space Station (ISS). The SpaceChain 2.0 investigation verifies the hardware and software required to extend robust blockchain capabilities into the developing space economy.

iss067e066375 (5/23/2022) --- A view of the SpaceChain 2.0 investigation in the cupola module aboard the International space Station (ISS). The SpaceChain 2.0 investigation verifies the hardware and software required to extend robust blockchain capabilities into the developing space economy.

Justin Hall flies the Alta 8 remotely piloted aircraft in March 2021 at Rosamond North Lakebed at NASA’s Armstrong Flight Research Center in Edwards, California. The Resilient Autonomy project used these flights to collect data with the Nav Module hardware and software developed by NASA’s Jet Propulsion Laboratory in Pasadena, California.

The Alta 8 remotely piloted aircraft flies above Rosamond North Lakebed at NASA's Armstrong Flight Research Center in Edwards, California. The Resilient Autonomy project used these flights to collect data with the Nav Module hardware and software developed by NASA's Jet Propulsion Laboratory in Pasadena, California.

The Alta 8 remotely piloted aircraft hovers above Rosamond North Lakebed in March 2021 at NASA's Armstrong Flight Research Center in Edwards, California. The Resilient Autonomy project used these flights to collect data with the Nav Module hardware and software developed by NASA's Jet Propulsion Laboratory in Pasadena, California.

CAPE CANAVERAL, Fla. – NASA's Kurt Leucht, from left, is working with undergraduate intern Gil Montague and post-graduate intern Karl Stolleis to develop the software that will control independent robots in a way that mimics the process ants use to scout for and then collect resources. Photo credit: NASA/Dmitri Gerondidakis

David L. Iverson of NASA Ames Research Center, Moffett Field, California (in foreground) led development of computer software to monitor the conditions of the gyroscopes that keep the International Space Station (ISS) properly oriented in space as the ISS orbits Earth. Also, Charles Lee is pictured. During its develoment, researchers used the software to analyze archived gyroscope records. In these tests, users noticed problems with the gyroscopes long before the current systems flagged glitches. Testers trained using several months of normal space station gyroscope data collected by the International Space Station Mission Control Center at NASA Johnson Space Center, Houston. Promising tests results convinced officials to start using the software in 2007.

Members of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration team pose with two full-scale development model rovers in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in January 2024. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. Three small rovers will ride aboard a lunar lander that will carry the project's base station and camera assembly. The rovers shown here are similar in size and appearance to the flight models that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used in a series of Mars Yard tests that helped confirm CADRE hardware and software can work together to accomplish key goals for the project. https://photojournal.jpl.nasa.gov/catalog/PIA26170
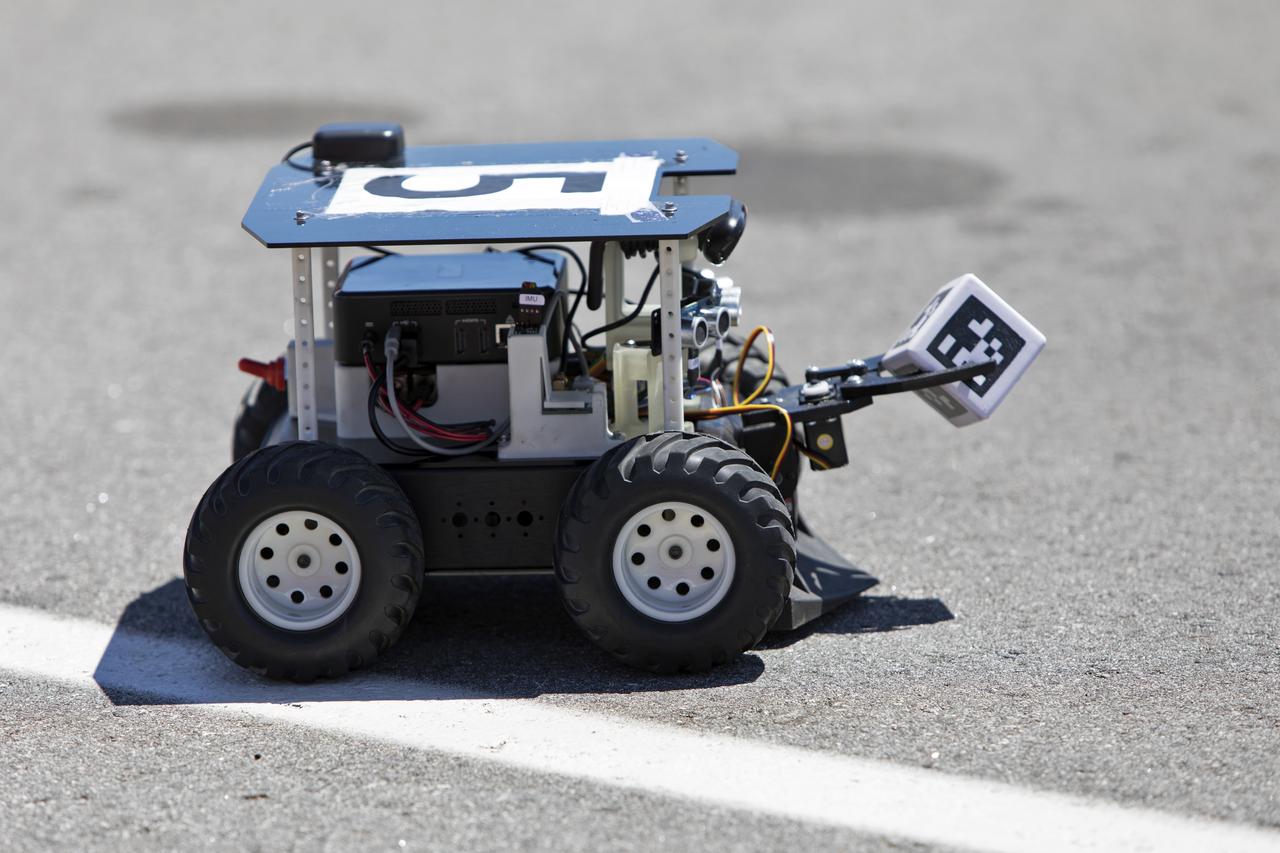
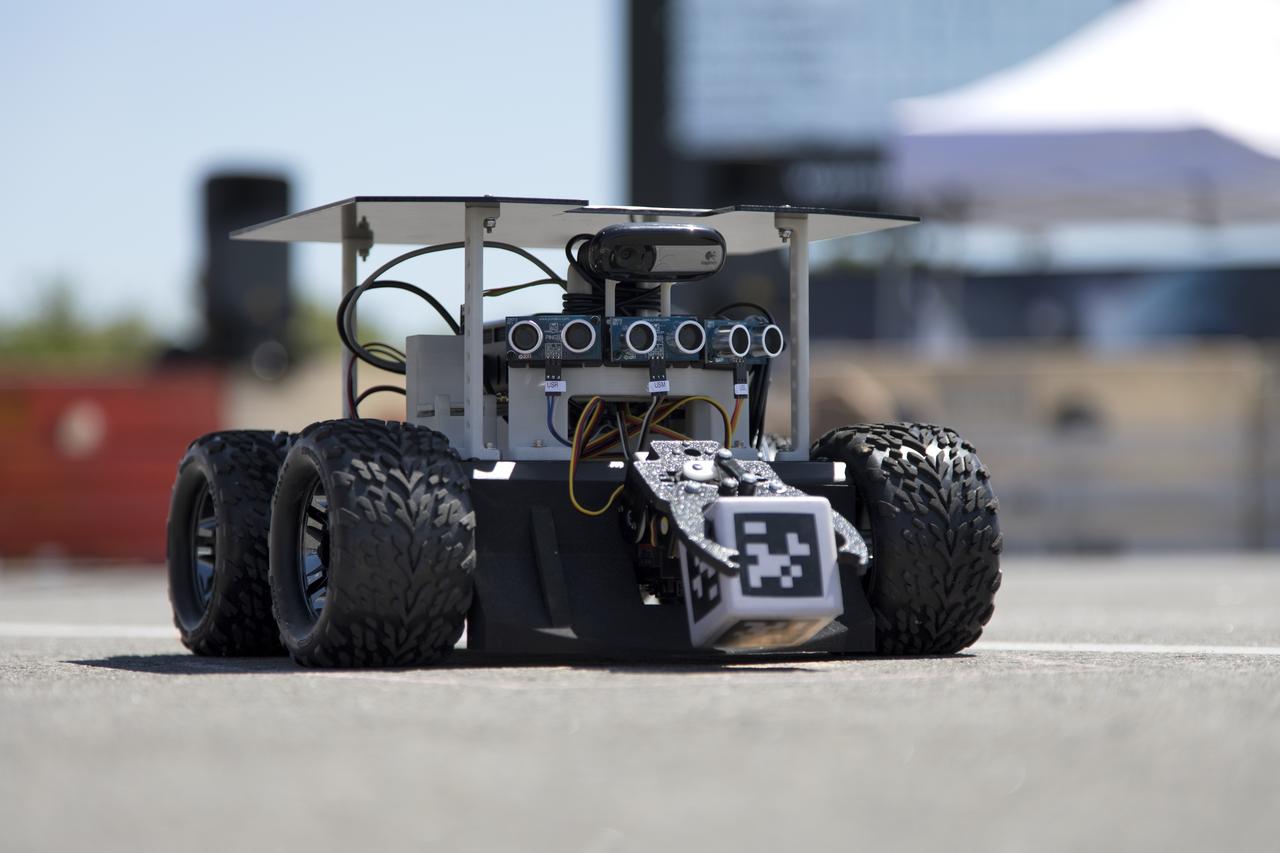
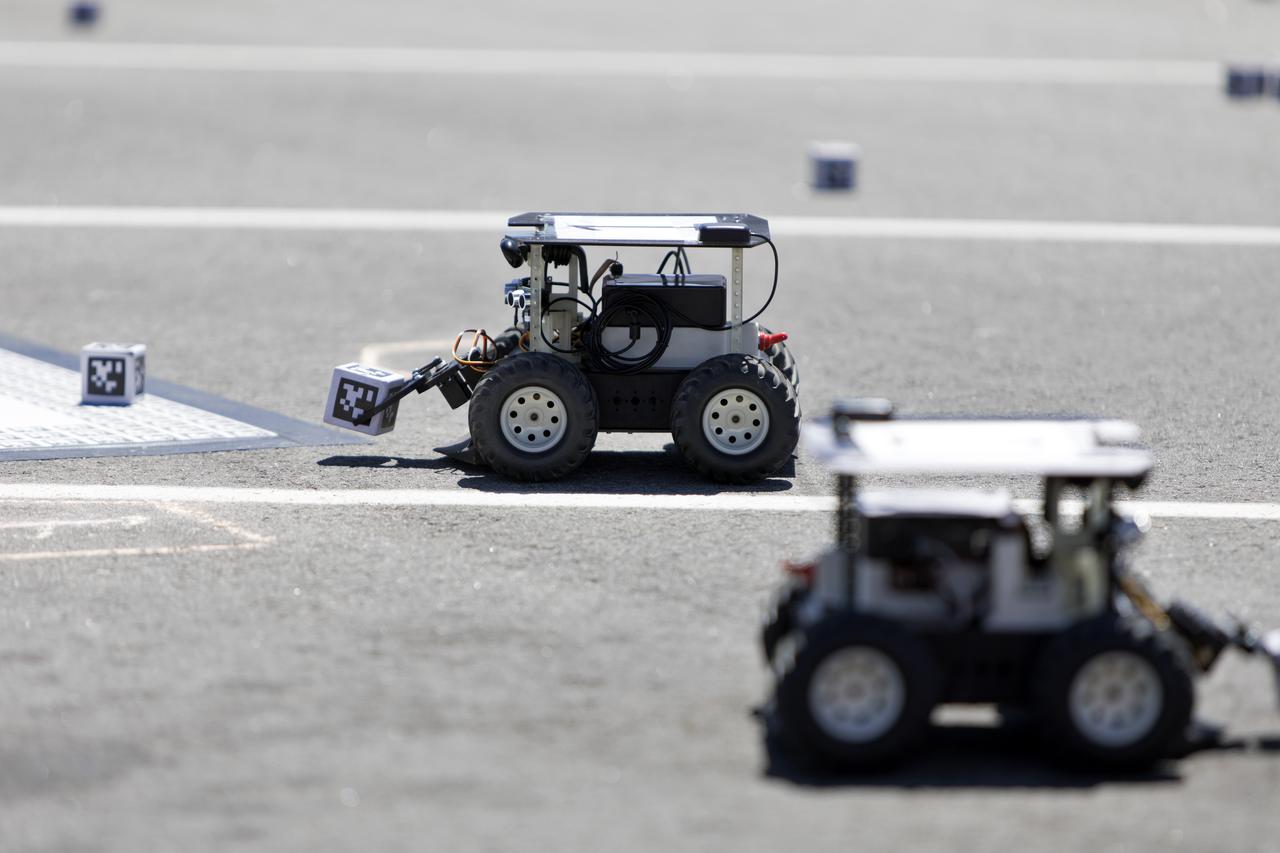
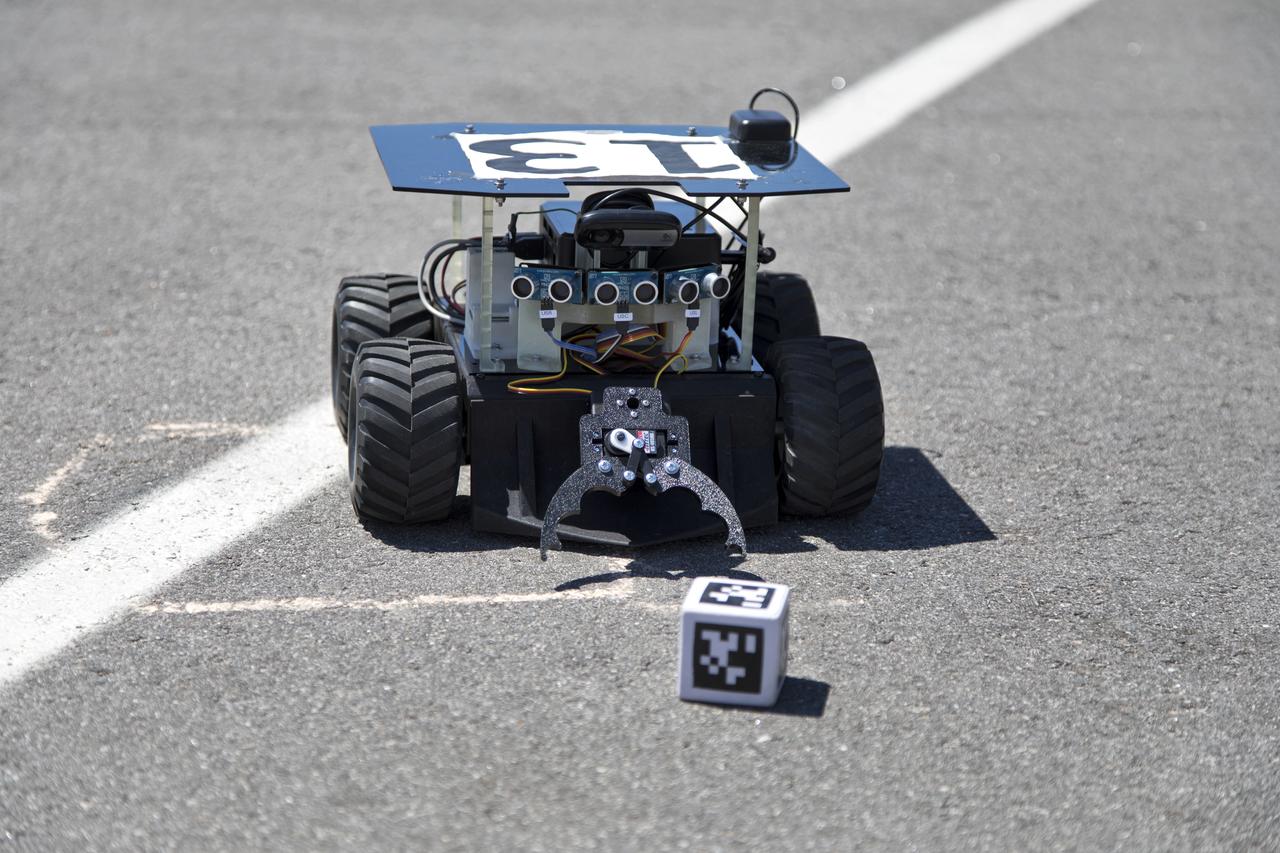
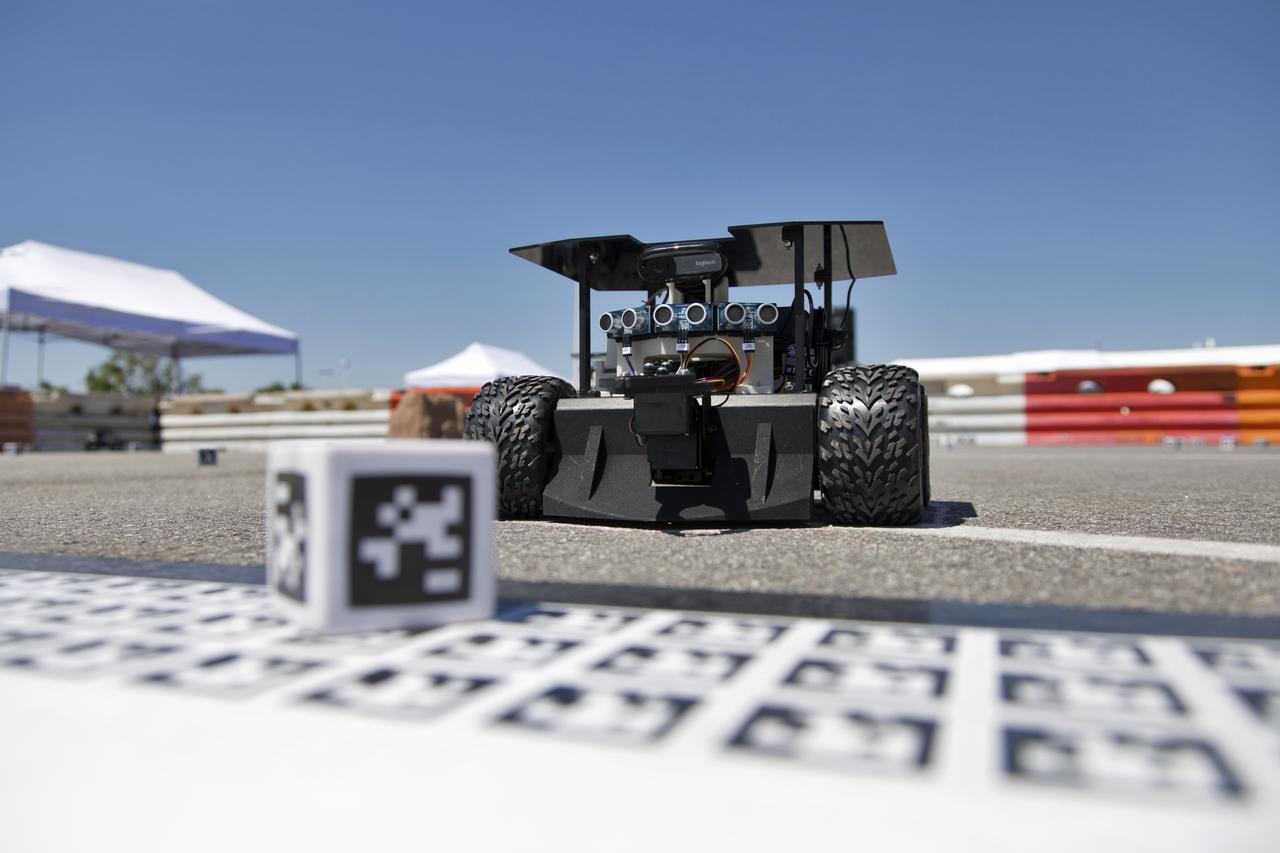
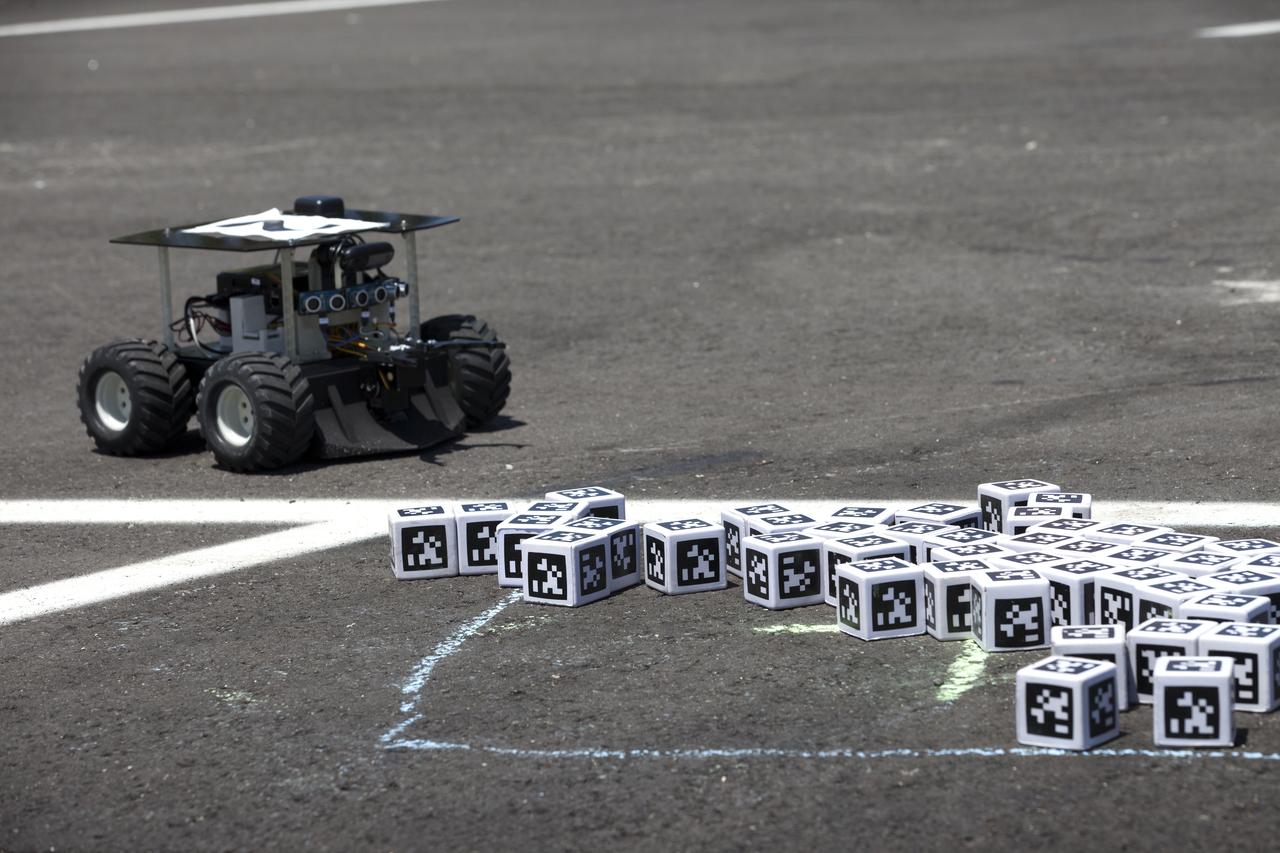
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.

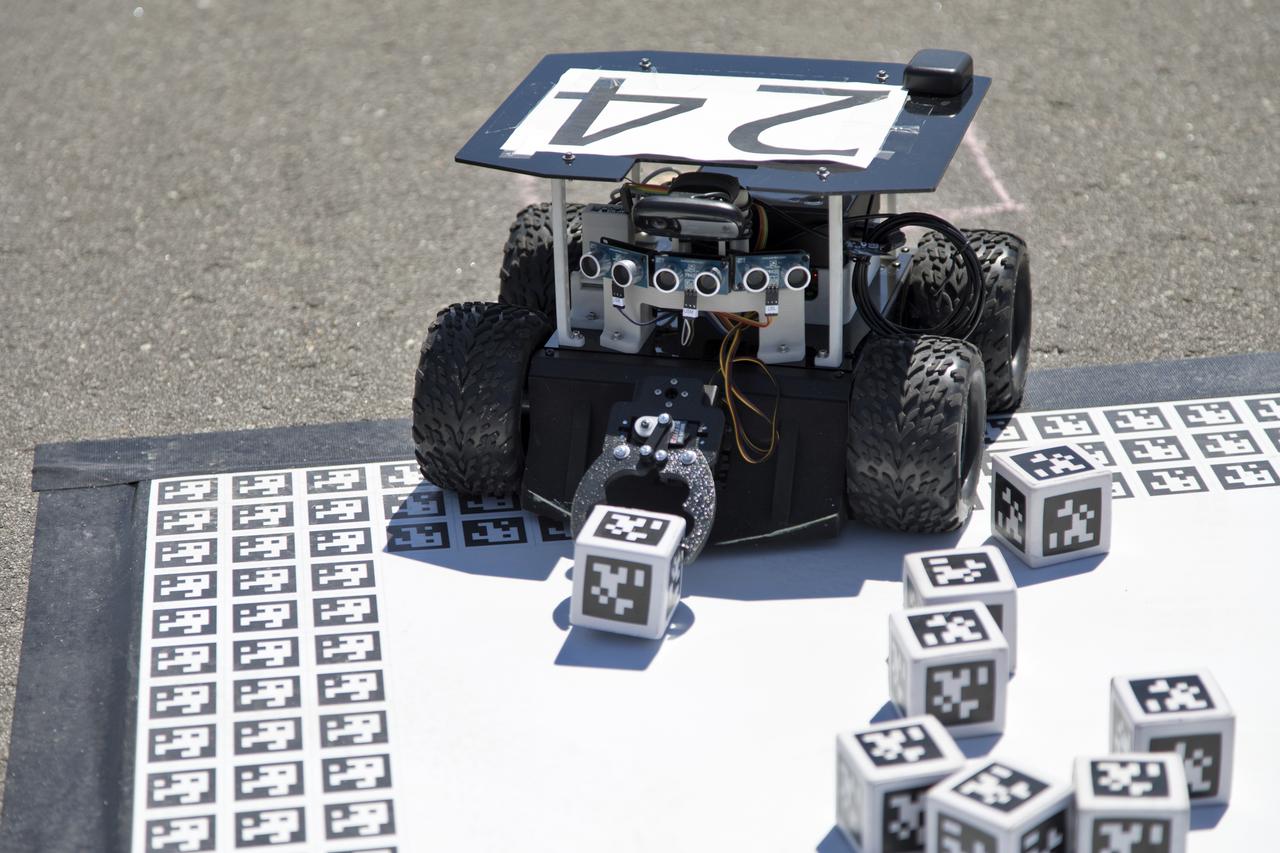
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. To add to the challenge, obstacles in the form of simulated rocks were placed in the completion arena. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.

In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.

In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.
A sign at the Kennedy Space Center Visitor Complex announces the second annual Swarmathon competition. Students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of cubes with AprilTags, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's second annual Swarmathon, 20 teams representing 22 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the moon or Mars.

In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's second annual Swarmathon, 20 teams representing 22 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the moon or Mars.

In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's second annual Swarmathon, 20 teams representing 22 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's second annual Swarmathon, 20 teams representing 22 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the moon or Mars.

Students from Montgomery College in Rockville in Maryland, follow the progress of their Swarmie robots during the Swarmathon competition at the Kennedy Space Center Visitor Complex. Students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.

In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's second annual Swarmathon, 20 teams representing 22 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the moon or Mars.
In the Swarmathon competition at the Kennedy Space Center Visitor Complex, students were asked to develop computer code for the small robots, programming them to look for "resources" in the form of AprilTag cubes, similar to barcodes. Teams developed search algorithms for the Swarmies to operate autonomously, communicating and interacting as a collective swarm similar to ants foraging for food. In the spaceport's third annual Swarmathon, 23 teams represented 24 minority serving universities and community colleges were invited to develop software code to operate these innovative robots known as "Swarmies" to help find resources when astronauts explore distant locations, such as the Moon or Mars.

LOUISVILLE, Colo. – During NASA's Commercial Crew Development Round 2 CCDev2) activities for the Commercial Crew Program CCP, Sierra Nevada Corp. SNC built a Simulator and Avionics Laboratory to help engineers evaluate the Dream Chaser's characteristics during the piloted phases of flight. Located at Sierra Nevada’s Space Systems facility in Louisville, Colo., it consists of a physical cockpit and integrated simulation hardware and software. The simulator is linked to the Vehicle Avionics Integration Laboratory, or VAIL, which serves as a platform for Dream Chaser avionics development, engineering testing and integration. VAIL also will also be used for verification and validation of avionics and software. Sierra Nevada is one of seven companies NASA entered into Space Act Agreements SAAs with during CCDev2 to aid in the innovation and development of American-led commercial capabilities for crew transportation and rescue services to and from the International Space Station and other low Earth orbit destinations. For information about CCP, visit www.nasa.gov/commercialcrew. Photo credit: Sierra Nevada Corp.

Senior Software Engineer Taylor Whitaker reports the results of a drawbar pull run to Astrobotic staff outside of the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

This narrated animation shows NASA's Perseverance rover on Mars and how the rover's SuperCam laser instrument works. SuperCam is led by Los Alamos National Laboratory in New Mexico, where the instrument's Body Unit was developed. That part of the instrument includes several spectrometers, control electronics and software. The Mast Unit was developed and built by several laboratories of the CNRS (French research center) and French universities under the contracting authority of CNES (French space agency). Calibration targets on the rover deck are provided by Spain's University of Valladolid. Animation available at https://photojournal.jpl.nasa.gov/catalog/PIA24426

As the size of a satellite is scaled down to the form factor of a CubeSat, the hardware must scale down as well. Unfortunately, the software inside does not follow the same trend. Simulation-to-Flight 1 (STF-1) aims to solve this problem by providing a simulation of the CubeSat that can be used for developing and testing the software on any laptop or desktop computer. Additionally, STF-1 hosts payloads that aim to increase the accuracy of navigation for CubeSats, monitor Space Weather over the North and South Poles, and test the durability of new materials used for Light Emitting Diodes (LEDs). The first spacecraft built in the state of West Virginia, STF-1, is a collaborative effort between the NASA Independent Verification and Validation Program, West Virginia University, and West Virginia small businesses.

As the size of a satellite is scaled down to the form factor of a CubeSat, the hardware must scale down as well. Unfortunately, the software inside does not follow the same trend. Simulation-to-Flight 1 (STF-1) aims to solve this problem by providing a simulation of the CubeSat that can be used for developing and testing the software on any laptop or desktop computer. Additionally, STF-1 hosts payloads that aim to increase the accuracy of navigation for CubeSats, monitor Space Weather over the North and South Poles, and test the durability of new materials used for Light Emitting Diodes (LEDs). The first spacecraft built in the state of West Virginia, STF-1, is a collaborative effort between the NASA Independent Verification and Validation Program, West Virginia University, and West Virginia small businesses.

As the size of a satellite is scaled down to the form factor of a CubeSat, the hardware must scale down as well. Unfortunately, the software inside does not follow the same trend. Simulation-to-Flight 1 (STF-1) aims to solve this problem by providing a simulation of the CubeSat that can be used for developing and testing the software on any laptop or desktop computer. Additionally, STF-1 hosts payloads that aim to increase the accuracy of navigation for CubeSats, monitor Space Weather over the North and South Poles, and test the durability of new materials used for Light Emitting Diodes (LEDs). The first spacecraft built in the state of West Virginia, STF-1, is a collaborative effort between the NASA Independent Verification and Validation Program, West Virginia University, and West Virginia small businesses.

HOUSTON – Engineers and managers work inside a simulator of The Boeing Company's CST-100 spacecraft during evaluations of potential designs and software functions in a room at the company's Houston location. The CST-100 is under development in partnership between the company and NASA's Commercial Crew Program, or CCP. The spacecraft is designed to fly to low-Earth orbit and potentially dock with the International Space Station. Photo credit: The Boeing Company

This Nissan LEAF vehicle being tested on the Ames campus is equipped with cameras, sensors and cellular data networking, and uses robotics software originally developed for Ames’ K-10 and K-REX planetary rovers to operate autonomously. Shown here are Kathy Sun and Liam Pedersen, Nissan who are awaiting the arrival of the visiting group from Renault-Nissan Alliance for a demo ride across Ames.

HOUSTON – A simulator of The Boeing Company's CST-100 spacecraft stands ready to begin evaluations of potential designs and software functions in a room at the company's Houston location. The CST-100 is under development in partnership between the company and NASA's Commercial Crew Program, or CCP. The spacecraft is designed to fly to low-Earth orbit and potentially dock with the International Space Station, which is seen on the screen in front of the simulator. Photo credit: The Boeing Company

KENNEDY SPACE CENTER, FLA. - The work to clean up and secure the roof of the Processing Control Center which sustained damage from Hurricane Frances is under way. The storm's path over Florida took it through Cape Canaveral and KSC property during Labor Day weekend. Located in Launch Complex 39, the facility houses some of the staff and computers responsible for Launch Processing System (LPS) software development, launch team training, and LPS maintenance.
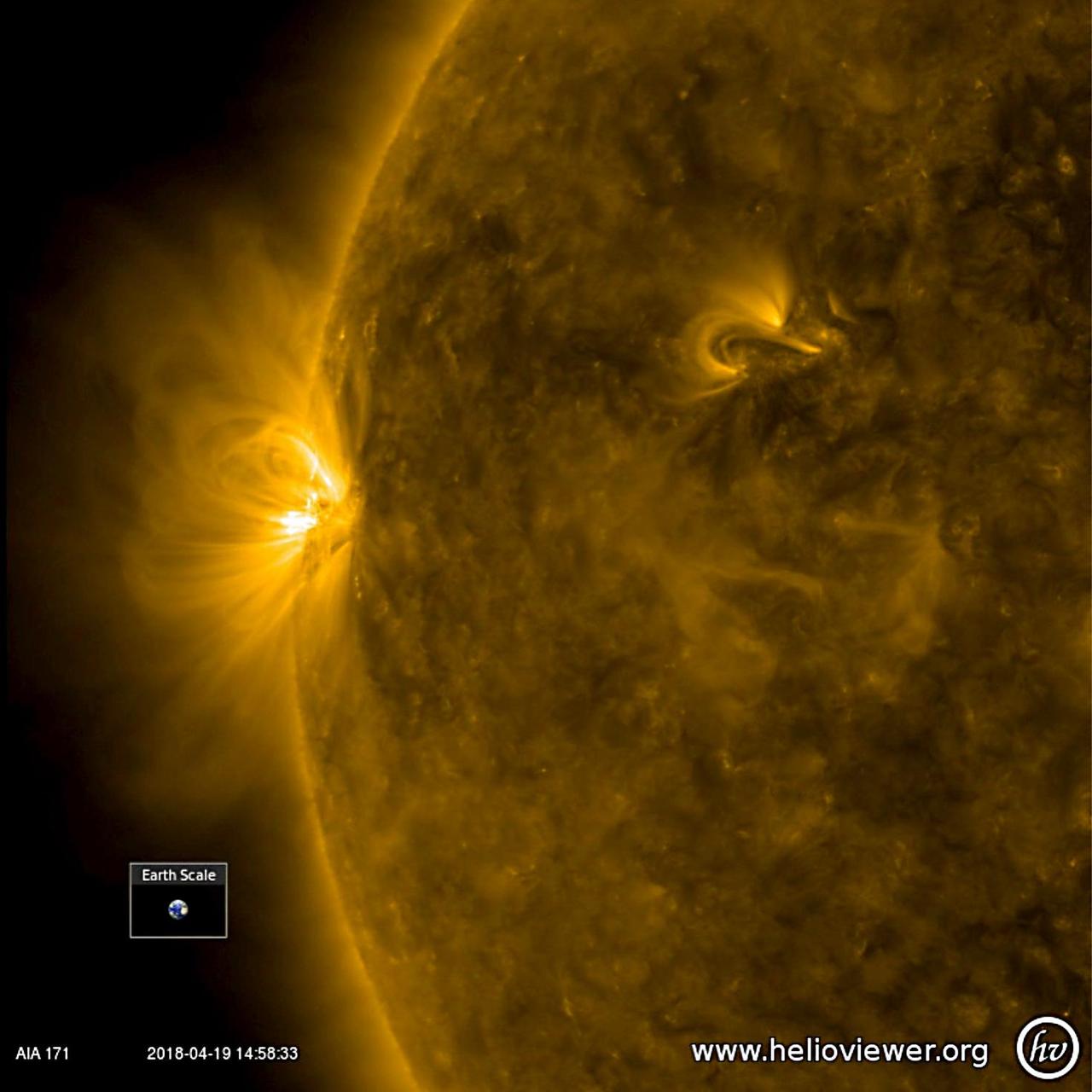
The sun featured just one, rather small active region over the past few days, but it developed rapidly and sported a lot of magnetic activity in just one day (Apr. 11-12, 2018). The activity was observed in a wavelength of extreme ultraviolet light. The loops and twisting arches above it are evidence of magnetic forces tangling with each other. The video clip was produced using Helioviewer software. Movies are available at https://photojournal.jpl.nasa.gov/catalog/PIA06676

KENNEDY SPACE CENTER, FLA. - KSC employees begin the work to clean up and secure the roof of the Processing Control Center which sustained damage from Hurricane Frances. The storm's path over Florida took it through Cape Canaveral and KSC property during Labor Day weekend. Located in Launch Complex 39, the facility houses some of the staff and computers responsible for Launch Processing System (LPS) software development, launch team training, and LPS maintenance.

HOUSTON – Engineers and managers work inside a simulator of The Boeing Company's CST-100 spacecraft during evaluations of potential designs and software functions in a room at the company's Houston location. The CST-100 is under development in partnership between the company and NASA's Commercial Crew Program, or CCP. The spacecraft is designed to fly to low-Earth orbit and potentially dock with the International Space Station, which is seen on the screen in front of the simulator. Photo credit: The Boeing Company

KENNEDY SPACE CENTER, FLA. - KSC employees secure the roof of the Processing Control Center which sustained damage from Hurricane Frances. The storm's path over Florida took it through Cape Canaveral and KSC property during Labor Day weekend. Located in Launch Complex 39 adjacent to the Vehicle Assembly Building (background right), the facility houses some of the staff and computers responsible for Launch Processing System (LPS) software development, launch team training, and LPS maintenance.
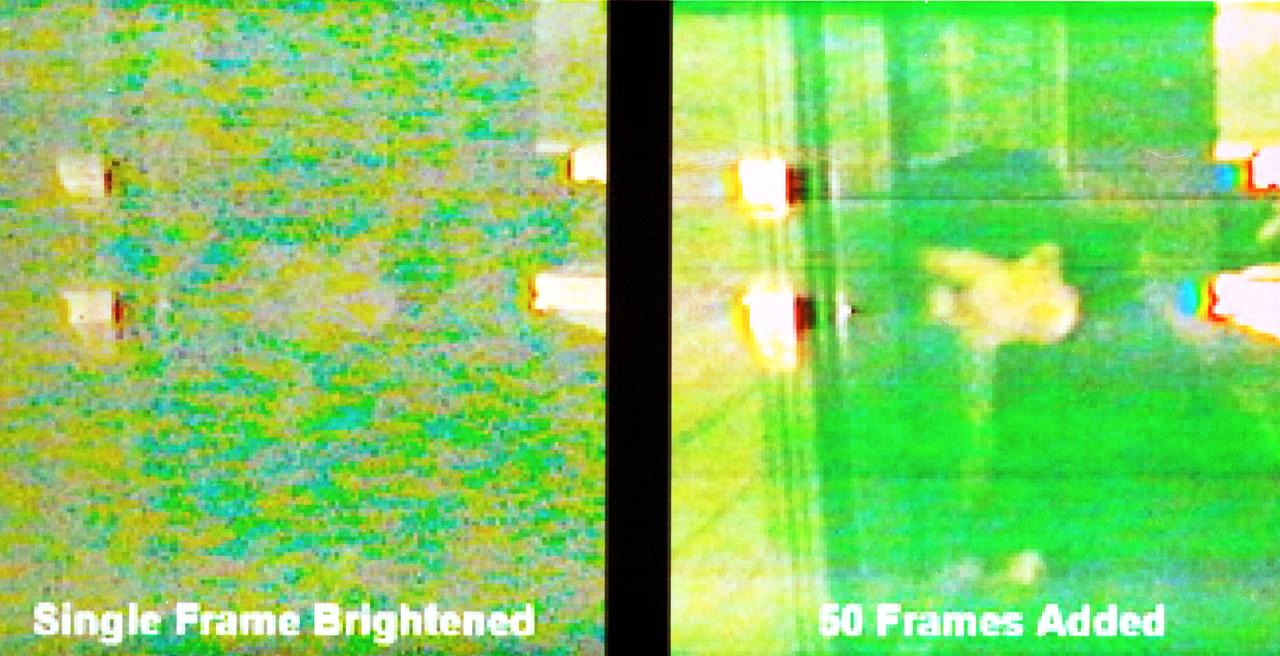
Two scientists at NASA's Marshall Space Flight Center,atmospheric scientist Paul Meyer and solar physicist Dr. David Hathaway, developed promising new software, called Video Image Stabilization and Registration (VISAR). VISAR may help law enforcement agencies catch criminals by improving the quality of video recorded at crime scenes. In this photograph, the single frame at left, taken at night, was brightened in order to enhance details and reduce noise or snow. To further overcome the video defects in one frame, Law enforcement officials can use VISAR software to add information from multiple frames to reveal a person. Images from less than a second of videotape were added together to create the clarified image at right. VISAR stabilizes camera motion in the horizontal and vertical as well as rotation and zoom effects producing clearer images of moving objects, smoothes jagged edges, enhances still images, and reduces video noise or snow. VISAR could also have applications in medical and meteorological imaging. It could steady images of ultrasounds, which are infamous for their grainy, blurred quality. The software can be used for defense application by improving recornaissance video imagery made by military vehicles, aircraft, and ships traveling in harsh, rugged environments.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

CAPE CANAVERAL, Fla. -- At the Marriott Courtyard Hotel in Cocoa Beach, Fla., Tom Engler, deputy director of Center Planning and Development at NASA's Kennedy Space Center, speaks to participants in the 4th International Workshop on Lunar and Planetary Compact and Cryogenic Science and Technology Applications. Scientists, engineers and entrepreneurs interested in research on the moon and other planetary surfaces, recently participated in the Workshop. Taking place April 8-11, 2014, the event was designed to foster collaborative work among those interested in solving the challenges of building hardware, software and businesses interested in going back to the moon and exploring beyond. Photo credit: NASA/Daniel Casper

Jeffrey Beyon, left, and Paul Joseph Petzar, right, from NASA's Langley Research Center, work with DAWN Air Data Acquisition and Processing software aboard NASA's DC-8 research aircraft, Sunday, Aug. 15, 2010, in support of the GRIP experiment at Fort Lauderdale International Airport in Fort Lauderdale, Fla. The Genesis and Rapid Intensification Processes (GRIP) experiment is a NASA Earth science field experiment in 2010 that is being conducted to better understand how tropical storms form and develop into major hurricanes. Photo Credit: (NASA/Paul E. Alers)

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

Bill McCarthy, software engineer and research laptop operator for STEReO, the Scalable Traffic Management for Emergency Response Operations project, at NASA's Ames Research Center, is seen as the STEReO teams works through scenarios, Wednesday, May 5, 2021 as Cal Fire conducts aerial fire fighting training exercises near Redding, California. STEReO, the Scalable Traffic Management for Emergency Response Operations project, led by NASA’s Ames Research Center, builds on NASA’s expertise in air traffic management, human factors research, and autonomous technology development to apply the agency’s work in Unmanned Aircraft Systems Traffic Management, or UTM, to public safety uses. Photo Credit: (NASA/Joel Kowsky)

CAPE CANAVERAL, Fla. -- At the Marriott Courtyard Hotel in Cocoa Beach, Fla., Tom Engler, deputy director of Center Planning and Development at NASA's Kennedy Space Center, speaks to participants in the 4th International Workshop on Lunar and Planetary Compact and Cryogenic Science and Technology Applications. Scientists, engineers and entrepreneurs interested in research on the moon and other planetary surfaces, recently participated in the Workshop. Taking place April 8-11, 2014, the event was designed to foster collaborative work among those interested in solving the challenges of building hardware, software and businesses interested in going back to the moon and exploring beyond. Photo credit: NASA/Daniel Casper
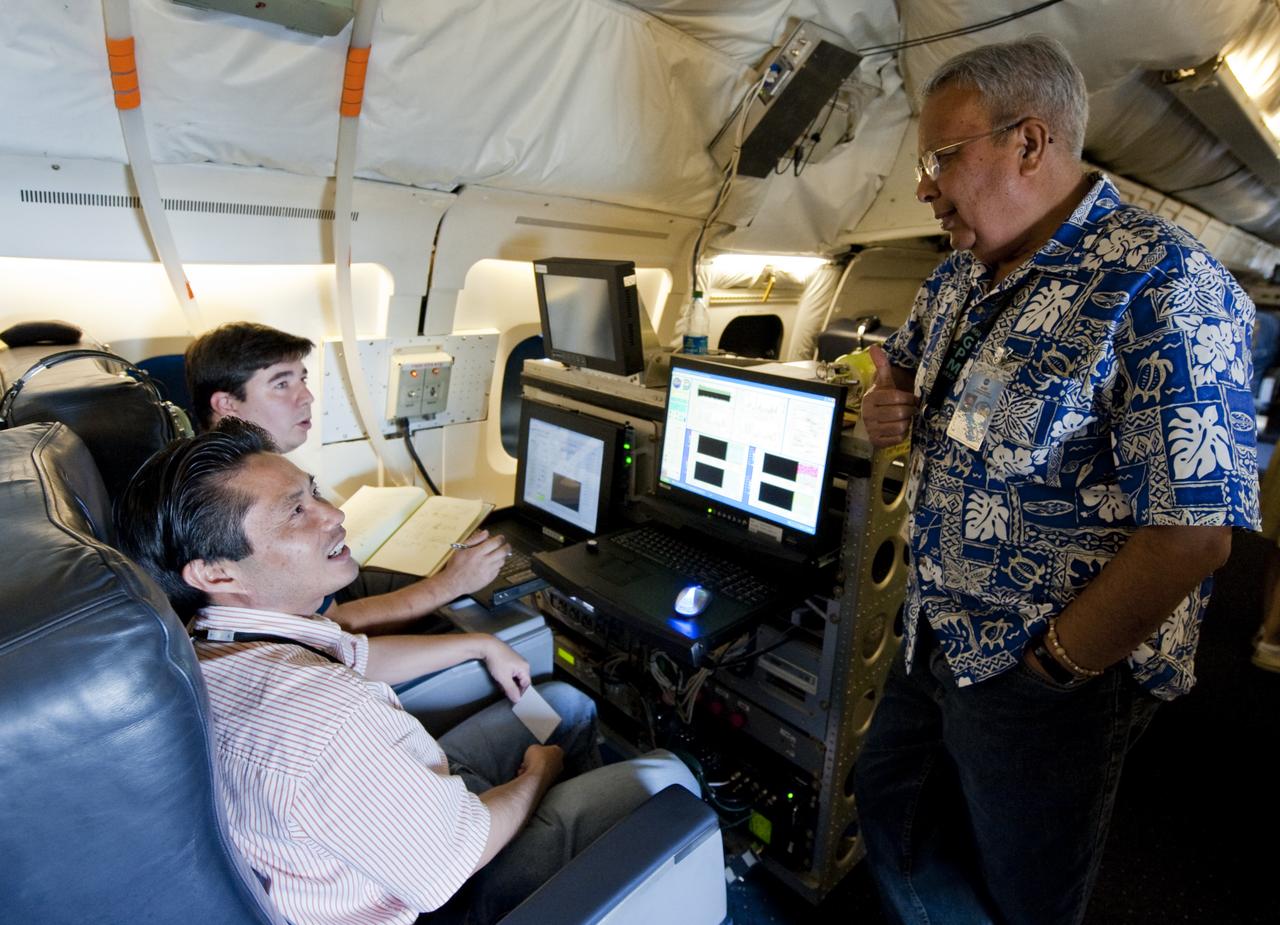
Jeffrey Beyon, lower right, and Paul Joseph Petzar, right, researchers from NASA's Langley Research Center, speak with Ramesh Kakar right, of the NASA Earth Science Division as they work with DAWN Air Data Acquisition and Processing software aboard NASA's DC-8 research aircraft, Sunday, Aug. 15, 2010, in support of the GRIP experiment at Fort Lauderdale International Airport in Fort Lauderdale, Fla. The Genesis and Rapid Intensification Processes (GRIP) experiment is a NASA Earth science field experiment in 2010 that is being conducted to better understand how tropical storms form and develop into major hurricanes. Photo Credit: (NASA/Paul E. Alers)

A team at NASA’s Kennedy Space Center in Florida tests small- and medium-sized bucket drums July 16, 2021, in the Granular Mechanics and Regolith Operations Lab’s “big bin” during prototype development for the pilot excavator, a robotic mission designed for lunar operations. The bucket drum excavated lunar regolith simulant. The Swamp Works team leveled and compacted the simulant before excavation as well as measured penetration during the excavator testing. Robotics engineers Jason Schuler and Austin Langton worked inside the bin, teaming up with software engineer Kurt Leucht, who worked just outside of it.

From left, John Honeycutt, Artemis II mission management team chair and Matthew Ramsey, Artemis II mission manager with NASA’s Exploration Systems Development Mission Directorate, participate in an Artemis II launch countdown simulation inside Firing Room 1 in the Launch Control Center at NASA’s Kennedy Space Center in Florida on Wednesday, Nov. 5, 2025. The simulations go through launch day scenarios to help launch team members test software and make adjustments if needed during countdown operations. For Artemis II, four astronauts will venture around the Moon, the first crewed mission on NASA’s path to establishing a long-term presence for science and exploration through Artemis.

Senior Software Engineer Taylor Whitaker stages Astrobotic’s mass-offloaded CubeRover – a lightweight, modular planetary rover – for a drawbar pull test inside the Granular Mechanics and Regolith Operations (GMRO) Laboratory’s regolith pit at NASA Kennedy Space Center’s Swamp Works facility on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is using the GMRO lab’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

The second X-45A Unmanned Combat Air Vehicle (UCAV) technology demonstrator completed its first flight on November 21, 2002, after taking off from a dry lakebed at NASA's Dryden Flight Research Center, Edwards Air Force Base, California. X-45A vehicle two flew for approximately 30 minutes and reached an airspeed of 195 knots and an altitude of 7500 feet. This flight validated the functionality of the UCAV flight software on the second air vehicle. Dryden is supporting the DARPA/Boeing team in the design, development, integration, and demonstration of the critical technologies, processes, and system attributes leading to an operational UCAV system. Dryden support of the X-45A demonstrator system includes analysis, component development, simulations, ground and flight tests.

The second X-45A Unmanned Combat Air Vehicle (UCAV) technology demonstrator completed its first flight on November 21, 2002, after taking off from a dry lakebed at NASA's Dryden Flight Research Center, Edwards Air Force Base, California. X-45A vehicle two flew for approximately 30 minutes and reached an airspeed of 195 knots and an altitude of 7500 feet. This flight validated the functionality of the UCAV flight software on the second air vehicle. Dryden is supporting the DARPA/Boeing team in the design, development, integration, and demonstration of the critical technologies, processes, and system attributes leading to an operational UCAV system. Dryden support of the X-45A demonstrator system includes analysis, component development, simulations, ground and flight tests.

The second X-45A Unmanned Combat Air Vehicle (UCAV) technology demonstrator completed its first flight on November 21, 2002, after taking off from a dry lakebed at NASA's Dryden Flight Research Center, Edwards Air Force Base, California. X-45A vehicle two flew for approximately 30 minutes and reached an airspeed of 195 knots and an altitude of 7500 feet. This flight validated the functionality of the UCAV flight software on the second air vehicle. Dryden is supporting the DARPA/Boeing team in the design, development, integration, and demonstration of the critical technologies, processes, and system attributes leading to an operational UCAV system. Dryden support of the X-45A demonstrator system includes analysis, component development, simulations, ground and flight tests.

Robotics Software Engineer II Chris Rampolla runs benchtop verifications on Astrobotic’s CubeRover – a lightweight, modular planetary rover – before delivery to Swamp Works at NASA’s Kennedy Space Center in Florida on June 30, 2022. Astrobotic – a Pittsburgh-based space robotics company – is planning to use Swamp Work’s Granular Mechanics and Regolith Operations Laboratory’s regolith bin, which holds approximately 120 tons of lunar regolith simulant, to depict how the company’s CubeRover would perform on the Moon. NASA’s Small Business Innovation Research program provided the funding for initial development, and a $2 million Tipping Point award from the agency has provided additional funding for continued development into a more mature rover.

The second X-45A Unmanned Combat Air Vehicle (UCAV) technology demonstrator completed its first flight on November 21, 2002, after taking off from a dry lakebed at NASA's Dryden Flight Research Center, Edwards Air Force Base, California. X-45A vehicle two flew for approximately 30 minutes and reached an airspeed of 195 knots and an altitude of 7500 feet. This flight validated the functionality of the UCAV flight software on the second air vehicle. Dryden is supporting the DARPA/Boeing team in the design, development, integration, and demonstration of the critical technologies, processes, and system attributes leading to an operational UCAV system. Dryden support of the X-45A demonstrator system includes analysis, component development, simulations, ground and flight tests.

Focus on active photos –Class B Simulation Evaluation in the ATOL Lab at Langley (Also at FAA Tech Center) where team is working with one another in the lab, reviewing data on the monitors. Working the software, adjusting the software systems. Going over the shoulder to show the displays and screens as the software is running. John Foster (left) in the role of an air taxi pilot in the simulator chair with Jim Chamberlain and Terence McClain at the flight manager stations running virtual air taxi integration simulations focusing on urban air space at NASA’s Langley Research Center in Hampton, Virginia on Sept. 25, 2024.

One of three drones used in recent tests by NASA’s Jet Propulsion Laboratory in Southern California flies over Mars Hill, a region of Death Valley National Park, in September 2025. The region’s rubbly, volcanic rocks have served as a Mars-like testing area and analog site for scientists since the 1970s, when NASA was preparing to land the twin Viking spacecraft on the Red Planet. The drone research — tests of navigation software for the Martian surface — was one of 25 projects funded by NASA’s Mars Exploration Program this past year to push the limits of future technologies. Sand dunes confused the navigation algorithm of the Ingenuity Mars helicopter during several of its last flights, including its 72nd and final flight on the Red Planet in January 2024. The navigation software in development would help future rotorcraft to track the surface of especially bland, featureless terrain similar to the barren sand dunes seen in parts of Death Valley and in the Mojave Desert and to land safely in cluttered environments like Mars Hill.

This is one of three research drones that NASA’s Jet Propulsion Laboratory in Southern California used in September 2025 to test navigation software that could be used by future rotorcraft on Mars. The drone is sitting in front of a location within Death Valley National Park called Mars Hill, which is littered with rubbly volcanic rocks and has been used by NASA’s Mars researchers since the 1970s, during preparations for the Viking lander missions. The work was among 25 projects funded by NASA’s Mars Exploration Program this past year to push the limits of future technologies. Sand dunes confused the navigation algorithm of the Ingenuity Mars helicopter during several of its last flights, including its 72nd and final flight on the Red Planet in January 2024. The navigation software in development would help future rotorcraft to track the surface of especially bland, featureless terrain similar to the barren sand dunes seen in parts of Death Valley and to land safely in cluttered environments like Mars Hill.

S48-E-007 (12 Sept 1991) --- Astronaut James F. Buchli, mission specialist, catches snack crackers as they float in the weightless environment of the earth-orbiting Discovery. This image was transmitted by the Electronic Still Camera, Development Test Objective (DTO) 648. The ESC is making its initial appearance on a Space Shuttle flight. Electronic still photography is a new technology that enables a camera to electronically capture and digitize an image with resolution approaching film quality. The digital image is stored on removable hard disks or small optical disks, and can be converted to a format suitable for downlink transmission or enhanced using image processing software. The Electronic Still Camera (ESC) was developed by the Man- Systems Division at the Johnson Space Center and is the first model in a planned evolutionary development leading to a family of high-resolution digital imaging devices. H. Don Yeates, JSC's Man-Systems Division, is program manager for the ESC. THIS IS A SECOND GENERATION PRINT MADE FROM AN ELECTRONICALLY PRODUCED NEGATIVE
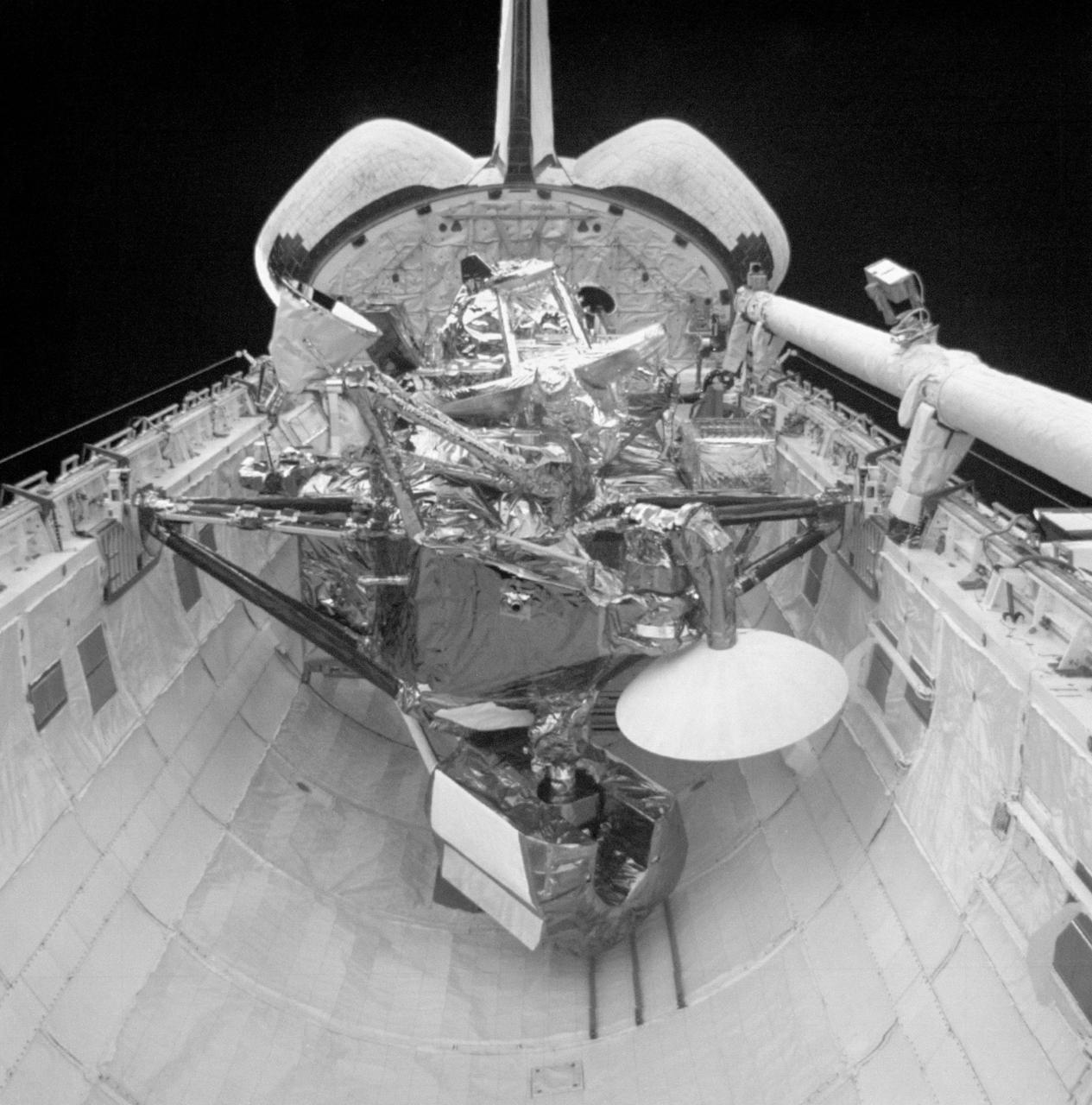
S48-E-013 (15 Sept 1991) --- The Upper Atmosphere Research Satellite (UARS) in the payload bay of the earth- orbiting Discovery. UARS is scheduled for deploy on flight day three of the STS-48 mission. Data from UARS will enable scientists to study ozone depletion in the stratosphere, or upper atmosphere. This image was transmitted by the Electronic Still Camera (ESC), Development Test Objective (DTO) 648. The ESC is making its initial appearance on a Space Shuttle flight. Electronic still photography is a new technology that enables a camera to electronically capture and digitize an image with resolution approaching film quality. The digital image is stored on removable hard disks or small optical disks, and can be converted to a format suitable for downlink transmission or enhanced using image processing software. The Electronic Still Camera (ESC) was developed by the Man- Systems Division at the Johnson Space Center and is the first model in a planned evolutionary development leading to a family of high-resolution digital imaging devices. H. Don Yeates, JSC's Man-Systems Division, is program manager for the ESC. THIS IS A SECOND GENERATION PRINT MADE FROM AN ELECTRONICALLY PRODUCED NEGATIVE.

Thomas Cauvel, an intern assisting with software/electrical engineering on NASA’s Orbital Syngas Commodity Augmentation Reactor, or OSCAR, at Kennedy Space Center assembles the flight hardware. OSCAR is an Early Career Initiative project at the Florida spaceport that studies technology to convert trash and human waste into useful gasses such as methane, hydrogen and carbon dioxide. By processing small pieces of trash in a high-temperature reactor, OSCAR is advancing new and innovative technology for managing waste in space. OSCAR would reduce the amount of space needed for waste storage within a spacecraft, turn some waste into gasses that have energy storage and life support applications, and ensure waste is no longer biologically active. A prototype has been developed, and a team of Kennedy employees are in the process of constructing a new rig for suborbital flight testing.
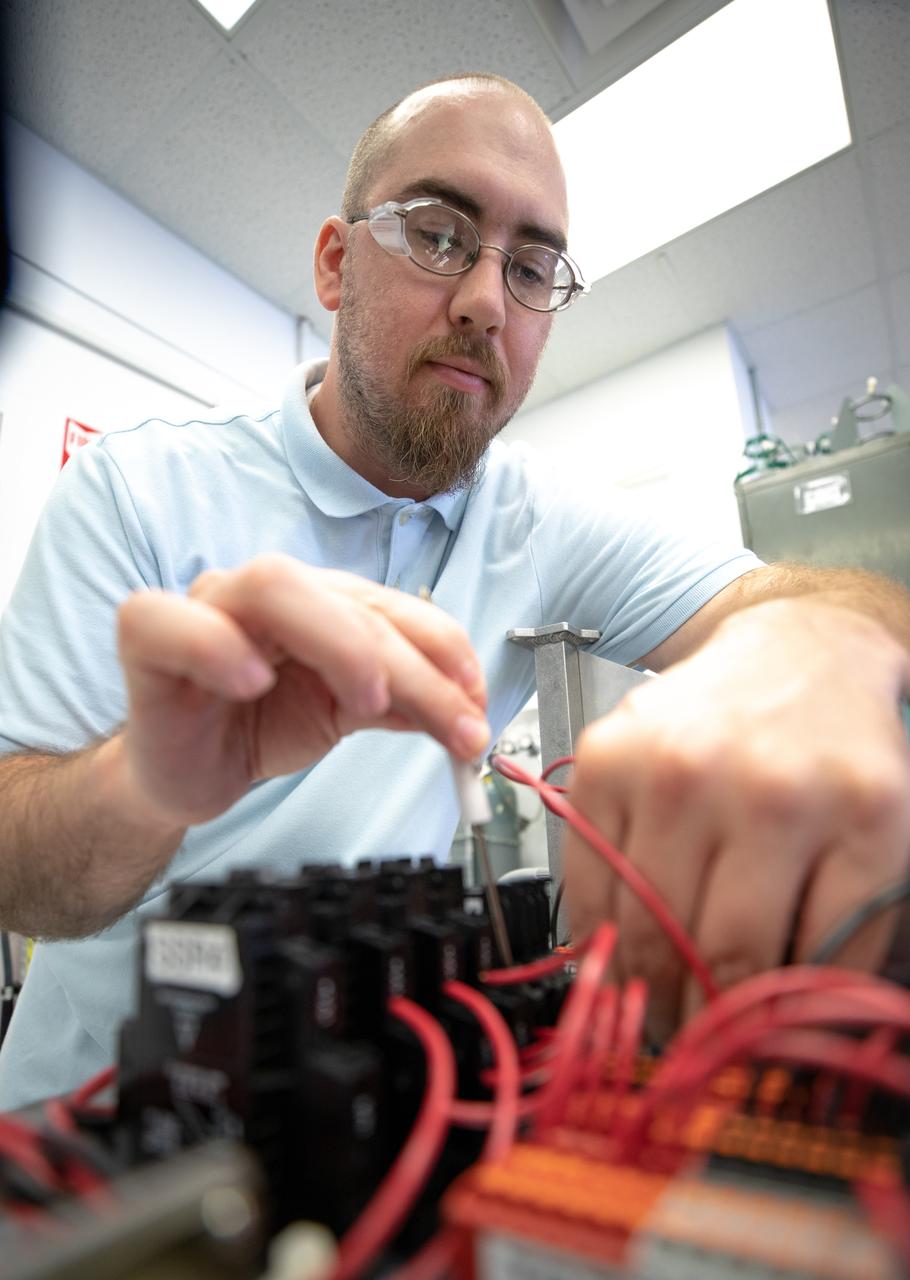
Thomas Cauvel, an intern assisting with software/electrical engineering on NASA’s Orbital Syngas Commodity Augmentation Reactor, or OSCAR, at Kennedy Space Center assembles the flight hardware. OSCAR is an Early Career Initiative project at the Florida spaceport that studies technology to convert trash and human waste into useful gasses such as methane, hydrogen and carbon dioxide. By processing small pieces of trash in a high-temperature reactor, OSCAR is advancing new and innovative technology for managing waste in space. OSCAR would reduce the amount of space needed for waste storage within a spacecraft, turn some waste into gasses that have energy storage and life support applications, and ensure waste is no longer biologically active. A prototype has been developed, and a team of Kennedy employees are in the process of constructing a new rig for suborbital flight testing.

Zach Roberts, pilot computer operator for STEReO, the Scalable Traffic Management for Emergency Response Operations project, at NASA's Ames Research Center, left, and Bill McCarthy, software engineer and research laptop operator for STEReO, the Scalable Traffic Management for Emergency Response Operations project, at NASA's Ames Research Center, right, setup equipment for drone operations, Wednesday, May 5, 2021 as Cal Fire conducts aerial fire fighting training exercises near Redding, California. STEReO, the Scalable Traffic Management for Emergency Response Operations project, led by NASA’s Ames Research Center, builds on NASA’s expertise in air traffic management, human factors research, and autonomous technology development to apply the agency’s work in Unmanned Aircraft Systems Traffic Management, or UTM, to public safety uses. Photo Credit: (NASA/Joel Kowsky)

Zach Roberts, pilot computer operator for STEReO, the Scalable Traffic Management for Emergency Response Operations project, at NASA's Ames Research Center, right, Bill McCarthy, software engineer and research laptop operator for STEReO, at NASA's Ames Research Center, left, are seen during simulated drone operations as part of STEReO field testing, Wednesday, May 5, 2021 as Cal Fire conducts aerial fire fighting training exercises near Redding, California. STEReO, the Scalable Traffic Management for Emergency Response Operations project, led by NASA’s Ames Research Center, builds on NASA’s expertise in air traffic management, human factors research, and autonomous technology development to apply the agency’s work in Unmanned Aircraft Systems Traffic Management, or UTM, to public safety uses. Photo Credit: (NASA/Joel Kowsky)

KENNEDY SPACE CENTER, FLA. - Adam Kissiah (right), a retired NASA-KSC engineer, looks at a photo of Allan Dianic's daughter, who has benefited from a cochlear implant that Kissiah developed while at NASA. Dianic (left) is a software engineer with ENSCO. Kissiah received an exceptional category NASA Space Act Award for his 25-year-old technology breakthrough during a technology awards luncheon held at the KSC Visitor Complex Debus Center. The award included a monetary award and a certificate signed by the NASA Administrator. Space Act Awards provide official recognition and grant equitable monetary awards for inventions and scientific and technical contributions that have helped achieve NASA's aeronautical and space goals.

Zach Roberts, pilot computer operator for STEReO, the Scalable Traffic Management for Emergency Response Operations project, at NASA's Ames Research Center, left, Bill McCarthy, software engineer and research laptop operator for STEReO, at NASA's Ames Research Center, right, are seen during simulated drone operations as part of STEReO field testing, Wednesday, May 5, 2021 as Cal Fire conducts aerial fire fighting training exercises near Redding, California. STEReO, the Scalable Traffic Management for Emergency Response Operations project, led by NASA’s Ames Research Center, builds on NASA’s expertise in air traffic management, human factors research, and autonomous technology development to apply the agency’s work in Unmanned Aircraft Systems Traffic Management, or UTM, to public safety uses. Photo Credit: (NASA/Joel Kowsky)